
レベルセンサ、基板の高さマップを決定する方法、及びリソグラフィ装置
【課題】基板表面の高さレベルを決定する際のより多くの融通性及び/又は効率的レベルセンサ技術を提供する。
【解決手段】基板W表面の高さレベルを決定するように構成されたレベルセンサであって、基板W上の反射後に測定ビームを受光するように配置された検出ユニットを備え、検出ユニットは、各検出素子が測定エリア81、82、83、84の測定サブエリア8a上に反射した測定ビームの一部を受光するように配置された検出素子のアレイを備え、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、処理ユニットは、測定サブエリア8aでの選択された解像度に応じて、測定サブエリア8aの高さレベルを計算し、又は複数の測定サブエリア8aの組合せの高さレベルを計算するように構成された、レベルセンサを提供する。
【解決手段】基板W表面の高さレベルを決定するように構成されたレベルセンサであって、基板W上の反射後に測定ビームを受光するように配置された検出ユニットを備え、検出ユニットは、各検出素子が測定エリア81、82、83、84の測定サブエリア8a上に反射した測定ビームの一部を受光するように配置された検出素子のアレイを備え、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、処理ユニットは、測定サブエリア8aでの選択された解像度に応じて、測定サブエリア8aの高さレベルを計算し、又は複数の測定サブエリア8aの組合せの高さレベルを計算するように構成された、レベルセンサを提供する。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 本発明は、レベルセンサ、基板の高さマップを決定する方法、及びリソグラフィ装置に関する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板に、通常は基板のターゲット部分に適用する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に使用可能である。このような場合、代替的にマスク又はレチクルとも呼ばれるパターニングデバイスを使用して、ICの個々の層上に形成すべき回路パターンを生成することができる。このパターンを、基板(例えばシリコンウェーハ)上のターゲット部分(例えば1つ又は幾つかのダイの一部を含む)に転写することができる。パターンの転写は通常、基板に設けた放射感応性材料(レジスト)の層への結像により行われる。一般的に、1枚の基板は、順次パターンが与えられる隣接したターゲット部分のネットワークを含んでいる。従来のリソグラフィ装置は、パターン全体をターゲット部分に1回で露光することによって各ターゲット部分が照射される、いわゆるステッパと、基板を所与の方向(「スキャン」方向)と平行あるいは逆平行に同期的にスキャンしながら、パターンを所与の方向(「スキャン」方向)に放射ビームでスキャンすることにより、各ターゲット部分が照射される、いわゆるスキャナとを含む。パターンを基板にインプリントすることによっても、パターニングデバイスから基板へとパターンを転写することが可能である。
【0003】
[0003] パターンを投影する基板の表面は普通、完全に平坦というわけではない。さらに、基板は、数ミクロンの厚さ変動を示すことがある。基板表面の平坦度及び厚さ変動の結果、例えば合焦エラー又は結像エラーによるパターンの不正確な投影が生じることがある。
【0004】
[0004] ウェーハの非平坦度及び厚さ変動を補正するために、好ましくはリソグラフィ装置内に組み込まれたレベルセンサを提供することが提案されている。そのようなレベルセンサを用いて、パターンを基板上に投影する前に基板の高さマップを決定することができる。後でこの高さマップを用いて基板上へのパターンの投影中に基板の位置を補正することができる。
【0005】
[0005] 既知の実施形態では、光学的三角測距方式を用いたマルチスポットレベルセンサが提供されて基板の高さマップが決定される。既知の実施形態は、基板上に9つの測定ビームを投影する9つの光源を有する投影ユニットと、各々が基板表面に反射した後で測定ビームの1つを受光するように配置された9つの検出センサを備える検出ユニットとを備える。検出センサによって提供される測定信号に基づいて、基板表面の高さレベルを決定できる。
【0006】
[0006] しかし、基板表面は、例えば基板の縁部付近などの基板の高さレベルを決定できないエリア、又は例えばスクライブレーンなどの基板表面の高さレベルを高精度に決定できないエリアを含むことがある。測定ビームがこれらの問題エリアの1つに部分的に当るときには、関連付けられた検出センサで得られた高さレベルを無視することが望ましい。これは、この測定エリアの一部だけが問題エリアであるにもかかわらず、全測定エリアが無視されるという結果を生む。問題エリアの存在が認識されないか又は確認されないときには、問題エリアが存在するスポットの計算された高さレベルは不正確で、その高さマップの精度は低下し、また、その結果、リソグラフィプロセス中の不正確な又は最適以下のレベリングによるオーバレイエラー及び/又は合焦エラーを引き起こすことがある。
【0007】
[0007] 測定するエリアを増加させるために、参照により本明細書に組み込むものとするUS7,704,826号は、基板表面上に9つの測定ビームを投影する9つの光源と、基板表面上で反射した後で9つの測定ビームを受光するように配置された9つの検出ユニットとを備える投影ユニットを備えるレベルセンサを開示する。検出ユニットは、各々が複数のセルを有する9つの2次元アレイを備える。9つの測定ビームの各々は、セルアレイの1つによって受光される。セルアレイのセルの数を利用可能なセルとして選択する選択ユニットが提供される。利用可能なセルを用いて基板表面の高さレベルを表す測定信号を得ることができる。利用可能なセルは、基板表面上の問題エリアを除外するために選択される。
【発明の概要】
【0008】
[0008] 基板表面の高さレベルを決定する際のより多くの融通性及び/又は効率を提供するレベルセンサ、又は少なくともレベルセンサの代替実施形態を提供するレベルセンサを提供することが望ましい。
【0009】
[0009]本発明のある実施形態によれば、基板表面の高さレベルを決定するように構成されたレベルセンサであって、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上の反射後に測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて測定エリア内の高さレベルを計算する処理ユニットとを備え、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように配置された検出素子アレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、
レベルセンサが提供される。
【0010】
[0010] 本発明のある実施形態によれば、リソグラフィプロセスで使用する基板の高さマップを決定する方法であって、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上で反射した後で測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて測定エリア内の高さレベルを計算する処理ユニットとを備える、基板表面の高さレベルを決定するように構成されたレベルセンサを提供するステップであって、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように構成された検出素子のアレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成されている、ステップと、
基板を提供するステップと、
測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定するステップであって、
投影ユニットによって基板上に測定ビームを投影することと、
前記検出ユニットによって反射したビームを受光することと、
測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベル、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算することとを含むステップと
を含む方法が提供される。
【0011】
[0011] 本発明のある実施形態によれば、リソグラフィ装置であって、
放射ビームを調節するように構成された照明システムと、
放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持するように構築された支持体と、
基板を保持するように構築された基板テーブルと、
基板のターゲット部分上にパターン付放射ビームを投影するように構成された投影システムとを備え、
リソグラフィ装置は、基板テーブル上に支持された基板の表面の高さレベルを決定するように構成されたレベルセンサを備え、該レベルセンサは、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上の反射後に測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて、測定エリア内の高さレベルを計算する処理ユニットとを備え、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように配置された検出素子のアレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、
リソグラフィ装置が提供される。
【0012】
[0012] 本発明の別の特徴及び利点と本発明の様々な実施形態の構造及び作用を、添付の図面を用いて以下に詳述する。本発明は、本明細書に記載する特定の実施形態に限定されないことに留意されたい。このような実施形態は、例示のみを目的として本明細書に記載されている。本明細書に含まれる教示に基づいて当業者はさらなる実施形態を容易に思い付くであろう。
【図面の簡単な説明】
【0013】
[0013] 対応する参照符号が対応する部分を示す添付の概略図を参照しながら以下に本発明の実施形態について説明するが、これは単に例示としてのものに過ぎない。
【図1】[0014]本発明のある実施形態によるリソグラフィ装置を示す。
【図2】[0015]本発明によるレベルセンサのある実施形態の側面図を示す。
【図3】[0016]図2のレベルセンサの平面図を示す。
【図4】[0017]基板表面上の測定サブエリアを含む測定エリアを示す。
【図5】本発明の別の実施形態を示す。
【0014】
[0018] 本発明の実施形態の特徴及び利点は、類似の参照番号がそれに対応する要素を一貫して識別する図面を参照しながら以下の説明を読むことでさらに明らかになろう。図面では、一般に、類似の参照番号が同一の、機能が類似した、及び/又は構造が類似した要素を示す。ある要素が最初に出現する図面は、対応する参照番号の左端の1つ又は複数の数字によって示される。
【発明を実施するための形態】
【0015】
[0019] 本明細書は、本発明の特徴を組み込んだ1つ又は複数の実施形態を開示する。開示される実施形態は本発明を例示するにすぎない。本発明の範囲は開示される実施形態に限定されない。本発明は、本明細書に添付される特許請求の範囲によって定義される。
【0016】
[0020] 記載された実施形態、及び本明細書で「一実施形態」、「ある実施形態」、「例示的実施形態」などに言及した場合、それは記載された実施形態が特定の特徴、構造、又は特性を含むことができるが、それぞれの実施形態が必ずしも特定の特徴、構造、又は特性を含まないことがあることを示す。さらに、このようなフレーズは、必ずしも同じ実施形態に言及するものではない。さらに、ある実施形態に関連して特定の特徴、構造、又は特性について記載している場合、明示的に記載されているか、記載されていないかにかかわらず、このような特徴、構造、又は特性を他の実施形態との関連で実行することが当業者の知識にあることが理解される。
【0017】
[0021] このような実施形態を詳述する前に、本発明の実施形態を実施することができる例示の環境を提示することが有用であろう。
【0018】
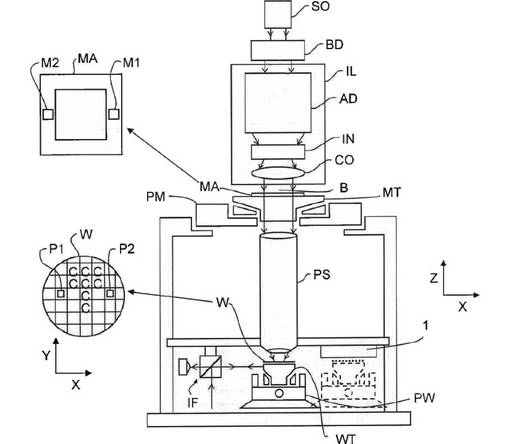
[0022] 図1は、本発明の一実施形態によるリソグラフィ装置を概略的に示す。この装置は、放射ビームB(例えば、UV放射又はその他の任意の好適な放射)を調節するように構成された照明システム(イルミネータ)ILと、パターニングデバイス(例えば、マスク)MAを支持するように構築され、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第1の位置決めデバイスPMに接続されたマスク支持構造(例えば、マスクテーブル)MTとを含む。この装置は、また、基板(例えば、レジストコートウェーハ)Wを保持するように構築され、特定のパラメータに従って基板を正確に位置決めするように構成された第2の位置決めデバイスPWに接続された基板テーブル(例えば、ウェーハテーブル)WT又は「基板支持体」を含む。さらに、この装置は、基板Wのターゲット部分C(例えば、1つ又は複数のダイを含む)上にパターニングデバイスMAによって放射ビームBへ付与されたパターンを投影するように構成された投影システム(例えば、屈折投影レンズシステム)PSを含む。
【0019】
[0023] 照明システムは、放射の誘導、整形、又は制御を行うための、屈折、反射、磁気、電磁、静電型等の光学コンポーネント、又はその任意の組合せなどの種々のタイプの光学コンポーネントを含んでいてもよい。
【0020】
[0024] マスク支持構造は、パターニングデバイスを支持、すなわちその重量を支えている。マスク支持構造は、パターニングデバイスの方向、リソグラフィ装置の設計等の条件、例えばパターニングデバイスが真空環境で保持されているか否かに応じた方法で、パターニングデバイスを保持する。マスク支持構造は、パターニングデバイスを保持するために、機械的、真空、静電式等のクランプ技術を使用することができる。マスク支持構造は、例えばフレーム又はテーブルでよく、必要に応じて固定式又は可動式でよい。マスク支持構造は、パターニングデバイスが例えば投影システムなどに対して確実に所望の位置にくるようにできる。本明細書において「レチクル」又は「マスク」という用語を使用した場合、その用語は、より一般的な用語である「パターニングデバイス」と同義と見なすことができる。
【0021】
[0025] 本明細書において使用する「パターニングデバイス」という用語は、基板のターゲット部分にパターンを生成するように、放射ビームの断面にパターンを与えるために使用し得る任意のデバイスを指すものとして広義に解釈されるべきである。ここで、放射ビームに与えられるパターンは、例えばパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分における所望のパターンに正確には対応しないことがある点に留意されたい。一般的に、放射ビームに与えられるパターンは、集積回路などのターゲット部分に生成されるデバイスの特定の機能層に相当する。
【0022】
[0026] パターニングデバイスは透過性又は反射性でよい。パターニングデバイスの例には、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルがある。マスクはリソグラフィにおいて周知のものであり、これには、バイナリマスク、レベンソン型(alternating)位相シフトマスク、ハーフトーン型(attenuated)位相シフトマスクのようなマスクタイプ、さらには様々なハイブリッドマスクタイプも含まれる。プログラマブルミラーアレイの一例として、小さなミラーのマトリクス配列を使用し、そのミラーは各々、入射する放射ビームを異なる方向に反射するよう個々に傾斜することができる。傾斜したミラーは、ミラーマトリクスによって反射する放射ビームにパターンを与える。
【0023】
[0027] 本明細書において使用する「投影システム」という用語は、例えば使用する露光放射、又は液浸液の使用や真空の使用などの他の要因に合わせて適宜、例えば屈折光学システム、反射光学システム、反射屈折光学システム、磁気光学システム、電磁光学システム及び静電光学システム、又はその任意の組合せを含む任意のタイプの投影システムを網羅するものとして広義に解釈されるべきである。本明細書において「投影レンズ」という用語を使用した場合、これはさらに一般的な「投影システム」という用語と同義と見なすことができる。
【0024】
[0028] 本明細書で示すように、本装置は透過タイプである(例えば透過マスクを使用する)。あるいは、装置は反射タイプでもよい(例えば上記で言及したようなタイプのプログラマブルミラーアレイを使用する、又は反射マスクを使用する)。
【0025】
[0029] リソグラフィ装置は2つ(デュアルステージ)又はそれ以上の基板テーブル又は「基板支持体」(及び/又は2つ以上のマスクテーブル又は「マスク支持体」)を有するタイプでよい。このような「マルチステージ」機械においては、追加のテーブル又は支持体を並行して使用するか、又は1つ又は複数の他のテーブル又は支持体を露光に使用している間に1つ又は複数のテーブル又は支持体で予備工程を実行することができる。
【0026】
[0030] リソグラフィ装置は、投影システムと基板との間の空間を充填するように、基板の少なくとも一部を水などの比較的高い屈折率を有する液体で覆えるタイプでもよい。液浸液は、例えばマスクと投影システムの間など、リソグラフィ装置の他の空間に適用することもできる。液浸技術は、投影システムの開口数を増加させるために当技術分野で周知である。本明細書で使用する「液浸」という用語は、基板などの構造を液体に沈めなければならないという意味ではなく、露光中に投影システムと基板の間に液体が存在するというほどの意味である。
【0027】
[0031] 図1を参照すると、イルミネータILは放射源SOから放射ビームを受ける。放射源とリソグラフィ装置とは、例えば放射源がエキシマレーザである場合に、別々の構成要素であってもよい。このような場合、放射源はリソグラフィ装置の一部を形成すると見なされず、放射ビームは、例えば適切な誘導ミラー及び/又はビームエクスパンダなどを備えるビームデリバリシステムBDを用いて、放射源SOからイルミネータILへと渡される。他の場合では、例えば放射源が水銀ランプの場合は、放射源がリソグラフィ装置の一体部分であってもよい。放射源SO及びイルミネータILは、必要に応じてビームデリバリシステムBDと共に放射システムと呼ぶことができる。
【0028】
[0032] イルミネータILは、放射ビームの角度強度分布を調整するように設定されたアジャスタADを備えていてもよい。通常、イルミネータILの瞳面における強度分布の外側及び/又は内側半径範囲(一般にそれぞれ、σ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCOなどの他の種々のコンポーネントを備えていてもよい。イルミネータILを用いて放射ビームを調節し、その断面にわたって所望の均一性と強度分布とが得られるようにしてもよい。
【0029】
[0033] 放射ビームBは、マスク支持構造(例えば、マスクテーブルMT)上に保持されたパターニングデバイス(例えば、マスクMA)に入射し、パターニングデバイスによってパターン形成される。マスクMAを横断した放射ビームBは、投影システムPSを通過し、投影システムPSは、ビームを基板Wのターゲット部分C上に合焦させる。第2の位置決めデバイスPW及び位置センサIF(例えば、干渉計デバイス、リニアエンコーダ又は容量センサ)を用いて、基板テーブルWTを、例えば様々なターゲット部分Cを放射ビームBの経路に位置決めするように正確に移動できる。同様に、第1の位置決めデバイスPMと別の位置センサ(図1には明示されていない)を用いて、マスクライブラリからの機械的な取り出し後又はスキャン中などに放射ビームBの経路に対してマスクMAを正確に位置決めできる。一般に、マスクテーブルMTの移動は、第1の位置決めデバイスPMの部分を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)を用いて実現できる。同様に、基板テーブルWT又は「基板支持体」の移動は、第2のポジショナPWの部分を形成するロングストロークモジュール及びショートストロークモジュールを用いて実現できる。ステッパの場合(スキャナとは対照的に)、マスクテーブルMTをショートストロークアクチュエータのみに接続するか、又は固定してもよい。マスクMA及び基板Wは、マスクアライメントマークM1、M2及び基板アライメントマークP1、P2を使用して位置合わせすることができる。図示のような基板アライメントマークは、専用のターゲット部分を占有するが、ターゲット部分の間の空間に位置してもよい(スクライブレーンアライメントマークとして周知である)。同様に、マスクMA上に複数のダイを設ける状況では、マスクアライメントマークをダイ間に配置してもよい。
【0030】
[0034] 図示のリソグラフィ装置は、以下のモードのうち少なくとも1つにて使用可能である。
【0031】
[0035] 1.ステップモードでは、マスクテーブルMT又は「マスク支持体」及び基板テーブルWT又は「基板支持体」は基本的に静止状態に維持される一方、放射ビームに与えたパターン全体が1回でターゲット部分Cに投影される(すなわち単一静的露光)。次に、別のターゲット部分Cを露光できるように、基板テーブルWT又は「基板支持体」がX方向及び/又はY方向に移動される。ステップモードでは、露光フィールドの最大サイズによって、単一静的露光で結像されるターゲット部分Cのサイズが制限される。
[0036] 2.スキャンモードでは、マスクテーブルMT又は「マスク支持体」及び基板テーブルWT又は「基板支持体」は同期的にスキャンされる一方、放射ビームに与えられるパターンがターゲット部分Cに投影される(すなわち単一動的露光)。マスクテーブルMT又は「マスク支持体」に対する基板テーブルWT又は「基板支持体」の速度及び方向は、投影システムPSの拡大(縮小)及び像反転特性によって求めることができる。スキャンモードでは、露光フィールドの最大サイズによって、単一動的露光におけるターゲット部分の(非スキャン方向における)幅が制限され、スキャン動作の長さによってターゲット部分の(スキャン方向における)高さが決まる。
[0037] 3.別のモードでは、マスクテーブルMT又は「マスク支持体」はプログラマブルパターニングデバイスを保持して基本的に静止状態に維持され、基板テーブルWT又は「基板支持体」を移動又はスキャンさせながら、放射ビームに与えられたパターンをターゲット部分Cに投影する。このモードでは、一般にパルス状放射源を使用して、基板テーブルWT又は「基板支持体」を移動させるごとに、又はスキャン中に連続する放射パルスの間で、プログラマブルパターニングデバイスを必要に応じて更新する。この動作モードは、以上で言及したようなタイプのプログラマブルミラーアレイなどのプログラマブルパターニングデバイスを使用するマスクレスリソグラフィに容易に適用できる。
【0032】
[0038] 上述した使用モードの組合せ及び/又は変形、又は全く異なる使用モードも利用できる。
【0033】
[0039] 図1に、リソグラフィ装置内の本発明によるレベルセンサ1の可能な場所が示されている。基板支持体WT及びその上に支持された基板Wは、基板の測定場所で破線で示されている。この測定場所で、基板Wの高さレベルが決定できる。
【0034】
[0040] 以前のレベルセンサ(LS)は、9つのスポットが2列並んだ18個の検知スポット(捕捉スポットを無視して)を受光するように設計されたカメラを有してもよい。9対のスポットの各々は、eスポットとoスポットとを含む。次に、これらの9つの位置でのウェーハレベルを以下の式(Ieはeスポットの強度、Ioはoスポットの強度)に従ってこれらの2つのスポットの間のコントラストcから直接計算できる。
【数1】

【0035】
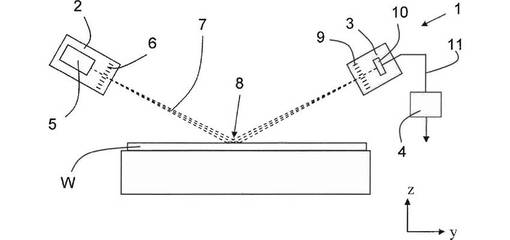
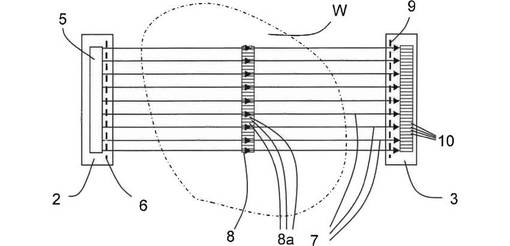
[0041] 図2は、全体を参照番号1で示すレベルセンサを概略的に示す。図3は、レベルセンサ1の概略平面図を示す。処理ユニット4は図3には示しておらず、基板Wの表面の一部が一点鎖線で示されている。この部分は、基板Wの表面の高さが決定される測定エリア8を含む。完全なウェーハ表面の高さマップを達成するため、レベルセンサは完全なウェーハ表面の高さを測定して決定する。
【0036】
[0042] レベルセンサ1は、基板Wの高さマップを決定するように構成される。この高さマップを用いて基板W上のパターンの投影中に基板の位置を補正することができる。レベルセンサはスタンドアロンデバイス内に配置できるが、好ましくは、図1に示すリソグラフィ装置に類似したリソグラフィ装置内に組み込まれる。
【0037】
[0043] レベルセンサ1は、投影ユニット2と、検出ユニット3と、処理ユニット4とを備える。
【0038】
[0044] 投影ユニット2は、光源5と、投影格子6とを備える。光源5は、任意の好適な光源でよい。光源5は好ましくは広帯域光源であるが、偏光又は非偏光レーザビームも使用できる。光源5は、投影格子6へ誘導される測定ビーム7を提供する。投影格子6は、パターン付測定ビーム7になるパターンを含む。
【0039】
[0045] 測定ビーム7は、基板上の測定エリア8へ向けて誘導される。基板Wへ向けて測定ビームを案内する光学素子を提供してもよい。なお、基板W及び/又はレベルセンサ1を相対的に移動させて、基板表面の異なる測定エリア8を測定ビーム7に整列させることができる。単一の光源5は、全測定エリア8を対象とする。代替実施形態では、複数の光源を提供して測定エリア8を対象としてもよい。
【0040】
[0046] 検出ユニット3は、基板W上での反射後に測定ビーム7を受光するように配置される。検出ユニット3は、検出格子9と、CMOS又はCCDセンサなどの検出素子10の少なくとも1次元アレイとを備える。検出素子10の1次元アレイは、単一のCMOS又はCCDセンサで構成された検出素子11の連続的なアレイであってもよい。これらのCMOS又はCCDセンサは広範に入手でき、比較的安価である。このアレイは、例えば、各々が検出素子10を形成する1024個のピクセルの列を含んでもよい。連続的なアレイは、例えばピクセルなどのすべての検出素子10が互いに隣接して配置され、密着しているため、検出素子10間の光の損失がなく、その結果、測定エリア8内の基板表面エリアの高さに関して情報損失がないという利点を持ち得る。さらに、連続的なアレイは、例えば、アレイの損傷時に、又は別の解像度が望まれるときに、別のアレイと容易に交換できる。
【0041】
[0047] 各検出素子10は、測定エリア8の測定サブエリア8aに関連付けられる。すなわち、検出素子10は、測定エリア8のそれぞれの測定サブエリア8aが反射した測定ビーム7の部分を受光する。それ故、検出素子10が受光する光の量は、関連付けられた測定サブエリア8aの高さレベルに関連する。
【0042】
[0048] なお、一般に、従来の9スポットレベルセンサは、9つの検出センサを実質的に10個以上の検出素子10を有する検出素子のアレイで置き換えることで比較的容易に構成することができる。投影格子及び検出格子はそのまま使用できる。光源はそのまま使用でき、又は測定エリア全体を対象とする単一の光源又は測定エリア全体を対象とする複数の光源と交換できる。
【0043】
[0049] 検出素子10のアレイは、従来の検出ユニットの9つの検出スポットの組合せの寸法に対応する寸法を有していてもよい。これらの寸法は、例えば、長さが20mm〜40mmで、幅が0.5mm〜2mmであってもよい。その他の任意の好適な寸法も適用できる。アレイは、500又は1000を超えるピクセルを有してもよい。
【0044】
[0050] 検出格子9は、少なくとも部分的に、測定ビーム7を受光するように配置され、検出格子9が透過する測定ビーム7の光は検出素子10によって受光される。検出素子10は各々、それぞれの検出素子10が受光する光の量に基づいて測定信号11を提供するように構成される。検出素子10の測定信号11は、処理ユニット4へ供給される。
【0045】
[0051] なお、検出ユニット3の感度を上げるために、各アレイが反射した測定ビーム7の実質的に同じ部分を受光するように配置された検出素子10の複数のアレイを提供してもよい。そのような実施形態では、検出素子の各アレイは、例えばCMOS又はCCDセンサなどの検出素子の単一の連続的なアレイによって形成できる。好ましくは、両方のアレイは同じ又は実質的に同じセンサによって形成される。一実施形態では、一方のアレイがeスポットを受光し、他方がoスポットを受光する。代替策は、両方のスポットから得られる強度を測定する単一セルのアレイを使用する方法である。
【0046】
[0052] さらに、従来の検出ユニット内に存在する捕捉スポットを提供してもよい。
【0047】
[0053] 処理ユニット4は、検出素子10の測定信号11に基づいて測定エリア8内の高さレベルを計算するように構成される。各検出素子10は、測定エリア8の測定サブエリア8aに関連付けられている。それ故、各検出素子10は、測定エリア8のそれぞれの測定サブエリア8aの高さレベルを決定するために使用できる。
【0048】
[0054] 処理ユニット4が各測定サブエリアの高さレベルを計算するように構成されているときには、基板Wの表面の高精度の高さマップを入手できる。
【0049】
[0055] また、複数の検出素子10の測定信号11を用いて、複数の検出素子10の組合せに関連付けられた測定サブエリア8aの組合せでの基板Wの表面の高さレベルを計算できる。複数の測定サブエリアの組合せの高さレベルの計算の結果、1つの高さレベルが計算されるエリアが拡大し、それ故、解像度が低下する。
【0050】
[0056] 一般に、より高い解像度の利点は、得られる基板Wの表面の高さマップがより高精度であるという点である。しかし、解像度が高くなると、リソグラフィ装置の処理ユニットとその他の制御デバイスとが扱わなければならないデータが増加する。解像度に優れた高さマップの場合、基板ステージのレベリング運動によって投影プロセスでの運動が増加する。この結果としてスループットが低下することがある。
【0051】
[0057] 基板の表面では、異なるフィーチャのために異なるエリアが使用される。例えば、基板表面上に存在するか又は投影される幾つかのフィーチャは限界基板/製品エリアであってもよい。これらのエリア内の高さレベルは高精度に決定できる。別のエリアでは、高さレベルはそれほど重要ではなく、及び/又は高さレベルは幾つかの測定サブエリアにまたがってわずかに変化している。これらのエリアでは、より低い解像度が使用される。
【0052】
[0058] さらに、処理ユニット4は、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリア、すなわち、問題エリアが存在する測定サブエリアに関連付けられた検出素子の測定信号を無視するように構成してもよい。そのような問題エリアが既知の製品レイアウトのために既知であるか、又は予想外の測定結果のために検出されたときには、これらのエリアから入手した測定信号を無視できる。高さマップ内では、これらのエリアの高さレベルを、例えば、隣接する測定サブエリアの情報に基づいて塗りつぶすことができる。別の方法では、複数の測定サブエリアの組合せのスポットサイズを選択する際に、問題エリアを除外して問題エリアの影響を低減できる。実際の問題エリアに対応する測定サブエリアを除外でき、問題エリアに近いがその内部にはない測定サブエリアを考慮に入れて基板の高さマップを決定できる。
【0053】
[0059] それ故、レベルセンサ1によってスポットサイズとスポットの場所を製品レイアウトに、例えば、特に関心があるエリアの存在と問題エリアの存在とに、又はフィールドエリア及び/又は製品サイズに適合させることが可能になる。特に、基板表面のフィーチャのレイアウトに応じて解像度を適合させることができる。
【0054】
[0060] ある測定サブエリアの解像度の選択は、2つの原則又はこれら2つの原則の組合せに基づいていてもよい。2つの原則を、以下にフィードフォワード及びフィードバック選択として説明する。
【0055】
[0061] 解像度選択のフィードフォワード原則では、解像度は基板/製品の既知のレイアウトフィーチャに基づいて選択される。フィーチャレイアウトは既知であるため、測定サブエリア内の高さレベルの決定の解像度を測定サブエリアのそれぞれのレイアウトに基づいて選択できる。例えば、限界基板/製品フィーチャでは、解像度は高い値に選択でき、検出素子10の1つ又は少数の測定信号11を用いて関連付けられた測定サブエリア又は測定サブエリアの組合せの高さレベルを計算でき、一方、他の限界からは遠いエリアでは、高さレベルは、より多数の関連付けられた検出素子10の測定信号11に用いて多数の測定サブエリアについて計算される。フィードフォワード原則では、問題エリアも識別でき、問題エリアに対応する測定サブエリアから得た測定信号を測定プロセス中に無視するよう設定できる。
【0056】
[0062] 解像度選択のフィードバック原則では、解像度は、検出ユニット3の検出素子10から得た測定信号11に基づいて選択される。例えば、隣接する検出素子10の測定信号11又はその導関数が同じか又は実質的に同じであるときには、これらの測定サブエリアを1つの高さレベルだけが決定される複数の測定サブエリアの組合せに結合することができる。隣接する検出素子10の測定信号11、又はその導関数が明白に異なるときには、より高い解像度が望ましく、各測定サブエリア又は比較的少数の測定サブエリアの組合せの高さレベルを計算でき、その結果、より高い解像度が得られる。予想外の測定信号11が得られたときには、これらの測定信号11は問題エリアを表すと考えられ、これらの測定信号を無視することができる。なお、予想外の測定信号は例えば、予想外の測定値として、又は隣接する測定検出素子10間の測定値の予想外の差として出現することがある。
【0057】
[0063] 上記のように、フィードフォワード原則とフィードバック原則の組合せも適用できる。例えば、フィードフォワード原則を用いて使用する解像度を計画でき、必要と考えられるときに、解像度はフィードバック原則に基づいて構成される。
【0058】
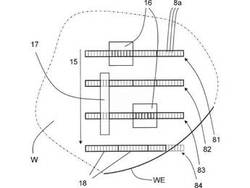
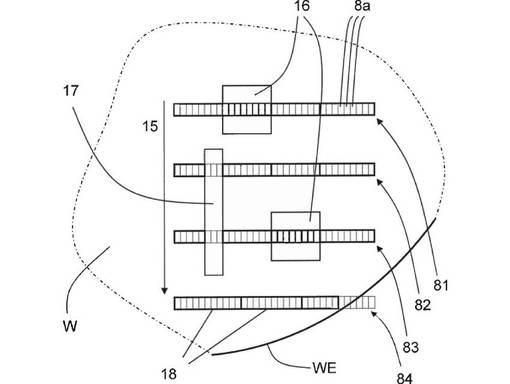
[0064] 図4は、基板Wの表面の一部の概略平面図を示す。一点鎖線は基板Wの表面上の輪郭を示し、WEで示す線は基板縁部を示す。
【0059】
[0065] 基板Wの表面上に、異なる測定エリア8が示されている。測定エリア81、82、83、84は、レベルセンサ1に対する基板Wの相対位置に関連する。それ故、レベルセンサ1に対する基板Wの4つの異なる位置で、相対位置の対応する測定エリアが示されている。実際、基板Wをレベルセンサ1に沿ってスキャン運動で移動させて基板表面の異なる位置をレベルセンサ1の測定場所に整列させることができる。このスキャン運動を矢印15で示す。測定エリア8が基板表面の全面にわたって移動するようにレベルセンサに対して基板Wを移動させることで、基板Wの実質的に全表面の高さマップが入手できる。
【0060】
[0066] 測定エリア81、82、83、84の各々は、検出素子10のアレイの関連付けられた検出素子10の測定範囲に対応する幾つかの測定サブエリア8aを含む。1つ又は複数の測定サブエリアは、このサブエリア又はサブエリアの組合せの高さレベルを決定するために使用する測定スポットを形成できる。測定スポットは太い実線で示され、下記のように、測定スポットはレイアウト依存であってもよい。
【0061】
[0067] 測定エリア81、82、83、84を以下に詳述する。
【0062】
[0068] 第1の測定エリア81は、高い合焦感度を有するフィーチャ16を含む。高い合焦感度を考慮して、フィーチャ16を含む測定エリア81の部分で高い解像度を有することが望ましい。高い解像度を得るために、この測定エリア81内の各測定サブエリア8aは別々の測定スポットとして選択される。それ故、フィーチャ16に重なる測定サブエリア8aに関連付けられた検出素子10の各々の測定信号11を用いてそれぞれの測定サブエリア8aの高さレベルが提供される。測定エリア81の残りでは、より低い解像度で十分であり、3つの測定スポットを用いて測定エリア81のこの残りの部分を扱うことができる。
【0063】
[0069] 第2の測定エリア82は、問題エリア71の一部を含む。この問題エリアから得られる測定信号を用いて基板Wの表面の高さレベルを計算することは望ましくない。処理ユニット4は、問題エリア17を含む測定エリア82のこの部分に関連付けられた検出素子10の測定信号11を無視するように構成される。測定エリア82の残りは4つの測定スポットに分割されて、このエリアでの所望の解像度を得る。基板表面の高さマップでは、問題エリアに隣接する測定スポットについて計算された高さレベルに基づいて、問題エリアの高さレベルを計算することができる。
【0064】
[0070] 第3の測定エリア83は、高い合焦感度を有するフィーチャ16の部分と問題エリア17の両方を含む。測定エリア81に対応して、フィーチャ16に重なる測定エリア83の解像度は比較的高い値に選択され、これによって、各測定サブエリア8aについて、別々の高さレベルが計算される。測定エリア82に対応して、問題エリア17に重なる測定エリア83の部分の測定信号11は無視される。測定エリアの残りの部分は同様の測定スポットに分割され、その結果、上記エリアについて解像度が選択される。しかし、解像度は任意の所望のレベルで選択してもよい。
【0065】
[0071] 第4の測定エリア84は基板縁部WEを含んで延在し、基板Wの表面の部分的に外側で下がっている。基板Wの表面の外側の測定エリアの部分は、この部分に関連付けられた検出素子10から得た測定信号11が高さレベルの計算で信頼性がない結果を提供するため、やはり問題エリアと見なされる。本発明のレベルセンサ1を用いて、基板縁部WEのごく近くで、また所望であれば、高い解像度で高さレベルを決定できるように、測定スポットを正確に選択できる。測定エリア84の残りは、各測定スポットに使用される検出素子11の数を選択することで所望の解像度で測定できる。
【0066】
[0072] 選択された解像度で基板表面上の各場所の高さレベルを決定することで、基板表面全体の高さマップを得ることができる。
【0067】
[0073] 以上、本発明のレベルセンサのある実施形態を論じてきた。レベルセンサは、任意の所望のパラメータに応じて解像度を選択できるという利点を有する。それによって、1つの測定サブエリア又は複数のサブエリアの組合せから構成された測定スポットを使用できる。これらの測定スポットは同じサイズでなくてもよい。選択されたスポットは基板Wのフィーチャレイアウトに依存し、スポットのサイズは動的に調整できる。さらに、測定スポットと解像度は過去のレベリングされたウェーハ及び/又は過去のレベリングされたエリアなどの履歴データに用いて選択できるので、ウェーハ間履歴データ及び/又はフィールド間指紋データを考慮することができる。
【0068】
[0074] 解像度、それ故、スポット数、スポットの位置及び個別のスポットサイズの選択におけるこの自由によって、ウェーハマッピングのルート選択が原則的にレイアウトから独立した状態で全フィールドのフィールドエリアの同じ有効範囲が確保される。この結果、予測可能な高いスループットが生まれる。
【0069】
[0075] さらに、動的なスポット選択によって、製品レイアウトにかかわらず、合焦縁部クリアランスエリア(FECエリア:focus edge clearance area)までのウェーハエリアの有効範囲が可能になる。これによって、Z、Ry露光設定点を作成する少なくとも2つのデータスポットを有することができ、縁部での合焦性能が改善される。
【0070】
[0076] さらに、寸法が小さく、高いプロセス依存性がある特定の領域は、対応する検出素子を使用しないことで無視できる。必要なときには、補間を用いて無視されたエリアを充填できる。
【0071】
[0077] 横方向の高い解像度によって、基板/製品フィーチャの合焦感度部分に対するレベルセンサエリアの有効範囲をカスタム化できる。例えば、合焦限界部分をより高い解像度で、すなわち、他のエリアよりも多くのスポットを用いて測定して潜在的な合焦エラーを低減できる。スポットのサイズは、製品の特定のフィーチャに合わせることができる。特に、縁部クリアランス周囲の高い解像度を達成できる。
【0072】
[0078] 本発明の方法を用いて、処理負荷を適合できる。例えば、30mmのフィールドを12mmの2つのエリアと6mmの1つのエリアとに分解できる。強度は「スポットごとに」増加し、処理負荷は、上述した従来のレベルセンサのケースでの9スポットではなく、3スポットの処理と同等である。スポット数は必要に応じて、例えば、機種と絶えず改善されているハードウェア処理能力とに応じて調整可能である。
【0073】
[0079] 本発明のレベルセンサを用いて、診断又は研究目的で高解像度の高さマップを製造できる。例えば、より高い横方向の精度に基づいてウェーハテーブルの洗浄とウェーハ負荷のオフセットとを実行できる。また、ウェーハが完全に連続して有効範囲内にあるので、ロット生産中のスポット検出だけでなく合焦スポットモニタリングも改善できる。
【0074】
[0080] 図示の実施形態では、従来のフォトダイオードの代わりに検出素子10の感光性アレイの使用が提案される。この実施形態は、SNRの低下という利点がある。従来のフォトダイオードはスポットの位置許容差に対処するために比較的大きい必要があり、ダークノイズが増加した。従来のフォトダイオードの代わりに選択された検出素子10からの信号のみを使用する機会と共に本発明による感光性アレイを用いるときには、ダークノイズは低減でき、例えば、SNRが改善する。
【0075】
[0081] ピクセルアレイを使用する1つの有り得る問題は、波長依存感度の可能性である。PDA(フォトダイオードアレイ)上のパッシベーション層の製造のばらつきのために、フォトダイオード各々の対は現在、波長あたり厳密に一致している。市販のアレイの場合、使用はそれほど厳密に管理されていない。多数のピクセルからの読み取り値を組み合わせることでこれらの差は平均化できる。そうでなければ、1つの方法として差の較正がある。別の方法は、広帯域光を感受し、単一の波長で放出する中間変換層の提供である。これによって照合ははるかに容易になり、市販のCMOSアレイの使用が可能になる余地が生じる。
【0076】
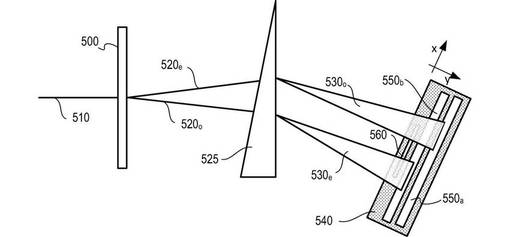
[0082] 図5は、スペクトル的に光センサ応答を分解するために、感光性アレイによる検知の前に光をスペクトル的に分解するデバイスが提供される別の実施形態を示す。同図は、測定エリアからの反射の後に(オプションとして)反射ビーム510を異常成分520eと正常成分520oとに分割する検出器格子500を示す。プリズム525(又は、格子などの、光線をスペクトル的に分解できるその他のデバイス)が提供される。結果として得られるスペクトル的に分解された光線530e、530oは、感光性検出器アレイ540を用いて検出される。感光性検出器アレイ540は、2つのアレイ550a、550bと捕捉スポット560のためのオプションの検出器とを備えるように見える(この特定の実施形態では)。
【0077】
[0083] この実施形態では、感光性アレイ上のx方向はウェーハ上のx位置を分解する。感光性アレイ上のy方向は波長を分解する。波長が分かっていると、プロセス依存性をさらに低減する助けになるウェーハ高さ再構築の可能性が高まる。ウェーハ高さの計算時にスペクトル成分を別々に重み付けすることができる。例えば、ウェーハ高さの計算時に、測定された製品を感受する波長の寄与により小さい重みを与えてもよい(又は完全に割り引いてもよい)。あるいは、ある種の製品スタックについてプロセス依存性を無視できる波長の特定の組合せを選択できる。全ての波長はレベルセンサ光学ハードウェアによって完全に事前決定された重みを与えられるため、現在、この方法は不可能である。
【0078】
[0084] 上記に鑑みて、本発明によるレベルセンサは、測定エリア内の基板表面の1つ又は複数の高さレベルの決定に関して、また基板表面の高さマップの決定に多大な融通性と信頼性とを提供すると結論することができる。
【0079】
[0085] 本文ではICの製造におけるリソグラフィ装置の使用に特に言及しているが、本明細書で説明するリソグラフィ装置には他の用途もあることを理解されたい。例えば、これは、集積光学システム、磁気ドメインメモリ用誘導及び検出パターン、フラットパネルディスプレイ、液晶ディスプレイ(LCD)、薄膜磁気ヘッドなどの製造である。こうした代替的な用途に照らして、本明細書で「ウェーハ」又は「ダイ」という用語を使用している場合、それぞれ、「基板」又は「ターゲット部分」という、より一般的な用語と同義と見なしてよいことが、当業者には認識される。本明細書に述べている基板は、露光前又は露光後に、例えばトラック(通常はレジストの層を基板に塗布し、露光したレジストを現像するツール)、メトロロジーツール及び/又はインスペクションツールで処理することができる。適宜、本明細書の開示は、以上及びその他の基板処理ツールに適用することができる。さらに基板は、例えば多層ICを生成するために、複数回処理することができ、したがって本明細書で使用する基板という用語は、既に複数の処理済み層を含む基板も指すことができる。
【0080】
[0086] 光リソグラフィの分野での本発明の実施形態の使用に特に言及してきたが、本発明は文脈によってはその他の分野、例えばインプリントリソグラフィでも使用することができ、光リソグラフィに限定されないことを理解されたい。インプリントリソグラフィでは、パターニングデバイス内のトポグラフィが基板上に作成されたパターンを画定する。パターニングデバイスのトポグラフィは基板に供給されたレジスト層内に刻印され、電磁放射、熱、圧力又はそれらの組合せを印加することでレジストは硬化する。パターニングデバイスはレジストから取り除かれ、レジストが硬化すると、内部にパターンが残される。
【0081】
[0087] 本明細書で使用する「放射」及び「ビーム」という用語は、イオンビーム又は電子ビームなどの粒子ビームのみならず、紫外線(UV)放射(例えば、365nm、248nm、193nm、157nm若しくは126nm、又はこれら辺りの波長を有する)及び極端紫外線光(EUV)放射(例えば、5nm〜20nmの範囲の波長を有する)を含むあらゆるタイプの電磁放射を網羅する。
【0082】
[0088] 「レンズ」という用語は、状況が許せば、屈折、反射、磁気、電磁及び静電光学コンポーネントを含む様々なタイプの光学コンポーネントのいずれか一つ、又はその組合せを指すことができる。
【0083】
[0089] 以上、本発明の特定の実施形態を説明したが、説明とは異なる方法でも本発明を実践できることが理解される。例えば、本発明は、上記で開示したような方法を述べる機械読み取り式命令の1つ又は複数のシーケンスを含むコンピュータプログラム、又はこのようなコンピュータプログラムを内部に記憶したデータ記憶媒体(例えば半導体メモリ、磁気又は光ディスク)の形態をとることができる。
【0084】
[0090] 上記の説明は例示的であり、限定的ではない。それ故、下記に示す特許請求の範囲から逸脱することなく、記載されたような本発明を変更できることが当業者には明白である。
【技術分野】
【0001】
[0001] 本発明は、レベルセンサ、基板の高さマップを決定する方法、及びリソグラフィ装置に関する。
【背景技術】
【0002】
[0002] リソグラフィ装置は、所望のパターンを基板に、通常は基板のターゲット部分に適用する機械である。リソグラフィ装置は、例えば、集積回路(IC)の製造に使用可能である。このような場合、代替的にマスク又はレチクルとも呼ばれるパターニングデバイスを使用して、ICの個々の層上に形成すべき回路パターンを生成することができる。このパターンを、基板(例えばシリコンウェーハ)上のターゲット部分(例えば1つ又は幾つかのダイの一部を含む)に転写することができる。パターンの転写は通常、基板に設けた放射感応性材料(レジスト)の層への結像により行われる。一般的に、1枚の基板は、順次パターンが与えられる隣接したターゲット部分のネットワークを含んでいる。従来のリソグラフィ装置は、パターン全体をターゲット部分に1回で露光することによって各ターゲット部分が照射される、いわゆるステッパと、基板を所与の方向(「スキャン」方向)と平行あるいは逆平行に同期的にスキャンしながら、パターンを所与の方向(「スキャン」方向)に放射ビームでスキャンすることにより、各ターゲット部分が照射される、いわゆるスキャナとを含む。パターンを基板にインプリントすることによっても、パターニングデバイスから基板へとパターンを転写することが可能である。
【0003】
[0003] パターンを投影する基板の表面は普通、完全に平坦というわけではない。さらに、基板は、数ミクロンの厚さ変動を示すことがある。基板表面の平坦度及び厚さ変動の結果、例えば合焦エラー又は結像エラーによるパターンの不正確な投影が生じることがある。
【0004】
[0004] ウェーハの非平坦度及び厚さ変動を補正するために、好ましくはリソグラフィ装置内に組み込まれたレベルセンサを提供することが提案されている。そのようなレベルセンサを用いて、パターンを基板上に投影する前に基板の高さマップを決定することができる。後でこの高さマップを用いて基板上へのパターンの投影中に基板の位置を補正することができる。
【0005】
[0005] 既知の実施形態では、光学的三角測距方式を用いたマルチスポットレベルセンサが提供されて基板の高さマップが決定される。既知の実施形態は、基板上に9つの測定ビームを投影する9つの光源を有する投影ユニットと、各々が基板表面に反射した後で測定ビームの1つを受光するように配置された9つの検出センサを備える検出ユニットとを備える。検出センサによって提供される測定信号に基づいて、基板表面の高さレベルを決定できる。
【0006】
[0006] しかし、基板表面は、例えば基板の縁部付近などの基板の高さレベルを決定できないエリア、又は例えばスクライブレーンなどの基板表面の高さレベルを高精度に決定できないエリアを含むことがある。測定ビームがこれらの問題エリアの1つに部分的に当るときには、関連付けられた検出センサで得られた高さレベルを無視することが望ましい。これは、この測定エリアの一部だけが問題エリアであるにもかかわらず、全測定エリアが無視されるという結果を生む。問題エリアの存在が認識されないか又は確認されないときには、問題エリアが存在するスポットの計算された高さレベルは不正確で、その高さマップの精度は低下し、また、その結果、リソグラフィプロセス中の不正確な又は最適以下のレベリングによるオーバレイエラー及び/又は合焦エラーを引き起こすことがある。
【0007】
[0007] 測定するエリアを増加させるために、参照により本明細書に組み込むものとするUS7,704,826号は、基板表面上に9つの測定ビームを投影する9つの光源と、基板表面上で反射した後で9つの測定ビームを受光するように配置された9つの検出ユニットとを備える投影ユニットを備えるレベルセンサを開示する。検出ユニットは、各々が複数のセルを有する9つの2次元アレイを備える。9つの測定ビームの各々は、セルアレイの1つによって受光される。セルアレイのセルの数を利用可能なセルとして選択する選択ユニットが提供される。利用可能なセルを用いて基板表面の高さレベルを表す測定信号を得ることができる。利用可能なセルは、基板表面上の問題エリアを除外するために選択される。
【発明の概要】
【0008】
[0008] 基板表面の高さレベルを決定する際のより多くの融通性及び/又は効率を提供するレベルセンサ、又は少なくともレベルセンサの代替実施形態を提供するレベルセンサを提供することが望ましい。
【0009】
[0009]本発明のある実施形態によれば、基板表面の高さレベルを決定するように構成されたレベルセンサであって、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上の反射後に測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて測定エリア内の高さレベルを計算する処理ユニットとを備え、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように配置された検出素子アレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、
レベルセンサが提供される。
【0010】
[0010] 本発明のある実施形態によれば、リソグラフィプロセスで使用する基板の高さマップを決定する方法であって、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上で反射した後で測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて測定エリア内の高さレベルを計算する処理ユニットとを備える、基板表面の高さレベルを決定するように構成されたレベルセンサを提供するステップであって、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように構成された検出素子のアレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成されている、ステップと、
基板を提供するステップと、
測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定するステップであって、
投影ユニットによって基板上に測定ビームを投影することと、
前記検出ユニットによって反射したビームを受光することと、
測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベル、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算することとを含むステップと
を含む方法が提供される。
【0011】
[0011] 本発明のある実施形態によれば、リソグラフィ装置であって、
放射ビームを調節するように構成された照明システムと、
放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持するように構築された支持体と、
基板を保持するように構築された基板テーブルと、
基板のターゲット部分上にパターン付放射ビームを投影するように構成された投影システムとを備え、
リソグラフィ装置は、基板テーブル上に支持された基板の表面の高さレベルを決定するように構成されたレベルセンサを備え、該レベルセンサは、
基板の測定エリア上に測定ビームを投影するように構成された投影ユニットと、
基板上の反射後に測定ビームを受光するように配置された検出ユニットと、
反射した測定ビームに基づいて、測定エリア内の高さレベルを計算する処理ユニットとを備え、
検出ユニットは、各検出素子が測定エリアの測定サブエリア上に反射した測定ビームの一部を受光するように配置された検出素子のアレイを備え、さらに、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、
処理ユニットは、測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、
リソグラフィ装置が提供される。
【0012】
[0012] 本発明の別の特徴及び利点と本発明の様々な実施形態の構造及び作用を、添付の図面を用いて以下に詳述する。本発明は、本明細書に記載する特定の実施形態に限定されないことに留意されたい。このような実施形態は、例示のみを目的として本明細書に記載されている。本明細書に含まれる教示に基づいて当業者はさらなる実施形態を容易に思い付くであろう。
【図面の簡単な説明】
【0013】
[0013] 対応する参照符号が対応する部分を示す添付の概略図を参照しながら以下に本発明の実施形態について説明するが、これは単に例示としてのものに過ぎない。
【図1】[0014]本発明のある実施形態によるリソグラフィ装置を示す。
【図2】[0015]本発明によるレベルセンサのある実施形態の側面図を示す。
【図3】[0016]図2のレベルセンサの平面図を示す。
【図4】[0017]基板表面上の測定サブエリアを含む測定エリアを示す。
【図5】本発明の別の実施形態を示す。
【0014】
[0018] 本発明の実施形態の特徴及び利点は、類似の参照番号がそれに対応する要素を一貫して識別する図面を参照しながら以下の説明を読むことでさらに明らかになろう。図面では、一般に、類似の参照番号が同一の、機能が類似した、及び/又は構造が類似した要素を示す。ある要素が最初に出現する図面は、対応する参照番号の左端の1つ又は複数の数字によって示される。
【発明を実施するための形態】
【0015】
[0019] 本明細書は、本発明の特徴を組み込んだ1つ又は複数の実施形態を開示する。開示される実施形態は本発明を例示するにすぎない。本発明の範囲は開示される実施形態に限定されない。本発明は、本明細書に添付される特許請求の範囲によって定義される。
【0016】
[0020] 記載された実施形態、及び本明細書で「一実施形態」、「ある実施形態」、「例示的実施形態」などに言及した場合、それは記載された実施形態が特定の特徴、構造、又は特性を含むことができるが、それぞれの実施形態が必ずしも特定の特徴、構造、又は特性を含まないことがあることを示す。さらに、このようなフレーズは、必ずしも同じ実施形態に言及するものではない。さらに、ある実施形態に関連して特定の特徴、構造、又は特性について記載している場合、明示的に記載されているか、記載されていないかにかかわらず、このような特徴、構造、又は特性を他の実施形態との関連で実行することが当業者の知識にあることが理解される。
【0017】
[0021] このような実施形態を詳述する前に、本発明の実施形態を実施することができる例示の環境を提示することが有用であろう。
【0018】
[0022] 図1は、本発明の一実施形態によるリソグラフィ装置を概略的に示す。この装置は、放射ビームB(例えば、UV放射又はその他の任意の好適な放射)を調節するように構成された照明システム(イルミネータ)ILと、パターニングデバイス(例えば、マスク)MAを支持するように構築され、特定のパラメータに従ってパターニングデバイスを正確に位置決めするように構成された第1の位置決めデバイスPMに接続されたマスク支持構造(例えば、マスクテーブル)MTとを含む。この装置は、また、基板(例えば、レジストコートウェーハ)Wを保持するように構築され、特定のパラメータに従って基板を正確に位置決めするように構成された第2の位置決めデバイスPWに接続された基板テーブル(例えば、ウェーハテーブル)WT又は「基板支持体」を含む。さらに、この装置は、基板Wのターゲット部分C(例えば、1つ又は複数のダイを含む)上にパターニングデバイスMAによって放射ビームBへ付与されたパターンを投影するように構成された投影システム(例えば、屈折投影レンズシステム)PSを含む。
【0019】
[0023] 照明システムは、放射の誘導、整形、又は制御を行うための、屈折、反射、磁気、電磁、静電型等の光学コンポーネント、又はその任意の組合せなどの種々のタイプの光学コンポーネントを含んでいてもよい。
【0020】
[0024] マスク支持構造は、パターニングデバイスを支持、すなわちその重量を支えている。マスク支持構造は、パターニングデバイスの方向、リソグラフィ装置の設計等の条件、例えばパターニングデバイスが真空環境で保持されているか否かに応じた方法で、パターニングデバイスを保持する。マスク支持構造は、パターニングデバイスを保持するために、機械的、真空、静電式等のクランプ技術を使用することができる。マスク支持構造は、例えばフレーム又はテーブルでよく、必要に応じて固定式又は可動式でよい。マスク支持構造は、パターニングデバイスが例えば投影システムなどに対して確実に所望の位置にくるようにできる。本明細書において「レチクル」又は「マスク」という用語を使用した場合、その用語は、より一般的な用語である「パターニングデバイス」と同義と見なすことができる。
【0021】
[0025] 本明細書において使用する「パターニングデバイス」という用語は、基板のターゲット部分にパターンを生成するように、放射ビームの断面にパターンを与えるために使用し得る任意のデバイスを指すものとして広義に解釈されるべきである。ここで、放射ビームに与えられるパターンは、例えばパターンが位相シフトフィーチャ又はいわゆるアシストフィーチャを含む場合、基板のターゲット部分における所望のパターンに正確には対応しないことがある点に留意されたい。一般的に、放射ビームに与えられるパターンは、集積回路などのターゲット部分に生成されるデバイスの特定の機能層に相当する。
【0022】
[0026] パターニングデバイスは透過性又は反射性でよい。パターニングデバイスの例には、マスク、プログラマブルミラーアレイ、及びプログラマブルLCDパネルがある。マスクはリソグラフィにおいて周知のものであり、これには、バイナリマスク、レベンソン型(alternating)位相シフトマスク、ハーフトーン型(attenuated)位相シフトマスクのようなマスクタイプ、さらには様々なハイブリッドマスクタイプも含まれる。プログラマブルミラーアレイの一例として、小さなミラーのマトリクス配列を使用し、そのミラーは各々、入射する放射ビームを異なる方向に反射するよう個々に傾斜することができる。傾斜したミラーは、ミラーマトリクスによって反射する放射ビームにパターンを与える。
【0023】
[0027] 本明細書において使用する「投影システム」という用語は、例えば使用する露光放射、又は液浸液の使用や真空の使用などの他の要因に合わせて適宜、例えば屈折光学システム、反射光学システム、反射屈折光学システム、磁気光学システム、電磁光学システム及び静電光学システム、又はその任意の組合せを含む任意のタイプの投影システムを網羅するものとして広義に解釈されるべきである。本明細書において「投影レンズ」という用語を使用した場合、これはさらに一般的な「投影システム」という用語と同義と見なすことができる。
【0024】
[0028] 本明細書で示すように、本装置は透過タイプである(例えば透過マスクを使用する)。あるいは、装置は反射タイプでもよい(例えば上記で言及したようなタイプのプログラマブルミラーアレイを使用する、又は反射マスクを使用する)。
【0025】
[0029] リソグラフィ装置は2つ(デュアルステージ)又はそれ以上の基板テーブル又は「基板支持体」(及び/又は2つ以上のマスクテーブル又は「マスク支持体」)を有するタイプでよい。このような「マルチステージ」機械においては、追加のテーブル又は支持体を並行して使用するか、又は1つ又は複数の他のテーブル又は支持体を露光に使用している間に1つ又は複数のテーブル又は支持体で予備工程を実行することができる。
【0026】
[0030] リソグラフィ装置は、投影システムと基板との間の空間を充填するように、基板の少なくとも一部を水などの比較的高い屈折率を有する液体で覆えるタイプでもよい。液浸液は、例えばマスクと投影システムの間など、リソグラフィ装置の他の空間に適用することもできる。液浸技術は、投影システムの開口数を増加させるために当技術分野で周知である。本明細書で使用する「液浸」という用語は、基板などの構造を液体に沈めなければならないという意味ではなく、露光中に投影システムと基板の間に液体が存在するというほどの意味である。
【0027】
[0031] 図1を参照すると、イルミネータILは放射源SOから放射ビームを受ける。放射源とリソグラフィ装置とは、例えば放射源がエキシマレーザである場合に、別々の構成要素であってもよい。このような場合、放射源はリソグラフィ装置の一部を形成すると見なされず、放射ビームは、例えば適切な誘導ミラー及び/又はビームエクスパンダなどを備えるビームデリバリシステムBDを用いて、放射源SOからイルミネータILへと渡される。他の場合では、例えば放射源が水銀ランプの場合は、放射源がリソグラフィ装置の一体部分であってもよい。放射源SO及びイルミネータILは、必要に応じてビームデリバリシステムBDと共に放射システムと呼ぶことができる。
【0028】
[0032] イルミネータILは、放射ビームの角度強度分布を調整するように設定されたアジャスタADを備えていてもよい。通常、イルミネータILの瞳面における強度分布の外側及び/又は内側半径範囲(一般にそれぞれ、σ-outer及びσ-innerと呼ばれる)を調節することができる。また、イルミネータILは、インテグレータIN及びコンデンサCOなどの他の種々のコンポーネントを備えていてもよい。イルミネータILを用いて放射ビームを調節し、その断面にわたって所望の均一性と強度分布とが得られるようにしてもよい。
【0029】
[0033] 放射ビームBは、マスク支持構造(例えば、マスクテーブルMT)上に保持されたパターニングデバイス(例えば、マスクMA)に入射し、パターニングデバイスによってパターン形成される。マスクMAを横断した放射ビームBは、投影システムPSを通過し、投影システムPSは、ビームを基板Wのターゲット部分C上に合焦させる。第2の位置決めデバイスPW及び位置センサIF(例えば、干渉計デバイス、リニアエンコーダ又は容量センサ)を用いて、基板テーブルWTを、例えば様々なターゲット部分Cを放射ビームBの経路に位置決めするように正確に移動できる。同様に、第1の位置決めデバイスPMと別の位置センサ(図1には明示されていない)を用いて、マスクライブラリからの機械的な取り出し後又はスキャン中などに放射ビームBの経路に対してマスクMAを正確に位置決めできる。一般に、マスクテーブルMTの移動は、第1の位置決めデバイスPMの部分を形成するロングストロークモジュール(粗動位置決め)及びショートストロークモジュール(微動位置決め)を用いて実現できる。同様に、基板テーブルWT又は「基板支持体」の移動は、第2のポジショナPWの部分を形成するロングストロークモジュール及びショートストロークモジュールを用いて実現できる。ステッパの場合(スキャナとは対照的に)、マスクテーブルMTをショートストロークアクチュエータのみに接続するか、又は固定してもよい。マスクMA及び基板Wは、マスクアライメントマークM1、M2及び基板アライメントマークP1、P2を使用して位置合わせすることができる。図示のような基板アライメントマークは、専用のターゲット部分を占有するが、ターゲット部分の間の空間に位置してもよい(スクライブレーンアライメントマークとして周知である)。同様に、マスクMA上に複数のダイを設ける状況では、マスクアライメントマークをダイ間に配置してもよい。
【0030】
[0034] 図示のリソグラフィ装置は、以下のモードのうち少なくとも1つにて使用可能である。
【0031】
[0035] 1.ステップモードでは、マスクテーブルMT又は「マスク支持体」及び基板テーブルWT又は「基板支持体」は基本的に静止状態に維持される一方、放射ビームに与えたパターン全体が1回でターゲット部分Cに投影される(すなわち単一静的露光)。次に、別のターゲット部分Cを露光できるように、基板テーブルWT又は「基板支持体」がX方向及び/又はY方向に移動される。ステップモードでは、露光フィールドの最大サイズによって、単一静的露光で結像されるターゲット部分Cのサイズが制限される。
[0036] 2.スキャンモードでは、マスクテーブルMT又は「マスク支持体」及び基板テーブルWT又は「基板支持体」は同期的にスキャンされる一方、放射ビームに与えられるパターンがターゲット部分Cに投影される(すなわち単一動的露光)。マスクテーブルMT又は「マスク支持体」に対する基板テーブルWT又は「基板支持体」の速度及び方向は、投影システムPSの拡大(縮小)及び像反転特性によって求めることができる。スキャンモードでは、露光フィールドの最大サイズによって、単一動的露光におけるターゲット部分の(非スキャン方向における)幅が制限され、スキャン動作の長さによってターゲット部分の(スキャン方向における)高さが決まる。
[0037] 3.別のモードでは、マスクテーブルMT又は「マスク支持体」はプログラマブルパターニングデバイスを保持して基本的に静止状態に維持され、基板テーブルWT又は「基板支持体」を移動又はスキャンさせながら、放射ビームに与えられたパターンをターゲット部分Cに投影する。このモードでは、一般にパルス状放射源を使用して、基板テーブルWT又は「基板支持体」を移動させるごとに、又はスキャン中に連続する放射パルスの間で、プログラマブルパターニングデバイスを必要に応じて更新する。この動作モードは、以上で言及したようなタイプのプログラマブルミラーアレイなどのプログラマブルパターニングデバイスを使用するマスクレスリソグラフィに容易に適用できる。
【0032】
[0038] 上述した使用モードの組合せ及び/又は変形、又は全く異なる使用モードも利用できる。
【0033】
[0039] 図1に、リソグラフィ装置内の本発明によるレベルセンサ1の可能な場所が示されている。基板支持体WT及びその上に支持された基板Wは、基板の測定場所で破線で示されている。この測定場所で、基板Wの高さレベルが決定できる。
【0034】
[0040] 以前のレベルセンサ(LS)は、9つのスポットが2列並んだ18個の検知スポット(捕捉スポットを無視して)を受光するように設計されたカメラを有してもよい。9対のスポットの各々は、eスポットとoスポットとを含む。次に、これらの9つの位置でのウェーハレベルを以下の式(Ieはeスポットの強度、Ioはoスポットの強度)に従ってこれらの2つのスポットの間のコントラストcから直接計算できる。
【数1】
【0035】
[0041] 図2は、全体を参照番号1で示すレベルセンサを概略的に示す。図3は、レベルセンサ1の概略平面図を示す。処理ユニット4は図3には示しておらず、基板Wの表面の一部が一点鎖線で示されている。この部分は、基板Wの表面の高さが決定される測定エリア8を含む。完全なウェーハ表面の高さマップを達成するため、レベルセンサは完全なウェーハ表面の高さを測定して決定する。
【0036】
[0042] レベルセンサ1は、基板Wの高さマップを決定するように構成される。この高さマップを用いて基板W上のパターンの投影中に基板の位置を補正することができる。レベルセンサはスタンドアロンデバイス内に配置できるが、好ましくは、図1に示すリソグラフィ装置に類似したリソグラフィ装置内に組み込まれる。
【0037】
[0043] レベルセンサ1は、投影ユニット2と、検出ユニット3と、処理ユニット4とを備える。
【0038】
[0044] 投影ユニット2は、光源5と、投影格子6とを備える。光源5は、任意の好適な光源でよい。光源5は好ましくは広帯域光源であるが、偏光又は非偏光レーザビームも使用できる。光源5は、投影格子6へ誘導される測定ビーム7を提供する。投影格子6は、パターン付測定ビーム7になるパターンを含む。
【0039】
[0045] 測定ビーム7は、基板上の測定エリア8へ向けて誘導される。基板Wへ向けて測定ビームを案内する光学素子を提供してもよい。なお、基板W及び/又はレベルセンサ1を相対的に移動させて、基板表面の異なる測定エリア8を測定ビーム7に整列させることができる。単一の光源5は、全測定エリア8を対象とする。代替実施形態では、複数の光源を提供して測定エリア8を対象としてもよい。
【0040】
[0046] 検出ユニット3は、基板W上での反射後に測定ビーム7を受光するように配置される。検出ユニット3は、検出格子9と、CMOS又はCCDセンサなどの検出素子10の少なくとも1次元アレイとを備える。検出素子10の1次元アレイは、単一のCMOS又はCCDセンサで構成された検出素子11の連続的なアレイであってもよい。これらのCMOS又はCCDセンサは広範に入手でき、比較的安価である。このアレイは、例えば、各々が検出素子10を形成する1024個のピクセルの列を含んでもよい。連続的なアレイは、例えばピクセルなどのすべての検出素子10が互いに隣接して配置され、密着しているため、検出素子10間の光の損失がなく、その結果、測定エリア8内の基板表面エリアの高さに関して情報損失がないという利点を持ち得る。さらに、連続的なアレイは、例えば、アレイの損傷時に、又は別の解像度が望まれるときに、別のアレイと容易に交換できる。
【0041】
[0047] 各検出素子10は、測定エリア8の測定サブエリア8aに関連付けられる。すなわち、検出素子10は、測定エリア8のそれぞれの測定サブエリア8aが反射した測定ビーム7の部分を受光する。それ故、検出素子10が受光する光の量は、関連付けられた測定サブエリア8aの高さレベルに関連する。
【0042】
[0048] なお、一般に、従来の9スポットレベルセンサは、9つの検出センサを実質的に10個以上の検出素子10を有する検出素子のアレイで置き換えることで比較的容易に構成することができる。投影格子及び検出格子はそのまま使用できる。光源はそのまま使用でき、又は測定エリア全体を対象とする単一の光源又は測定エリア全体を対象とする複数の光源と交換できる。
【0043】
[0049] 検出素子10のアレイは、従来の検出ユニットの9つの検出スポットの組合せの寸法に対応する寸法を有していてもよい。これらの寸法は、例えば、長さが20mm〜40mmで、幅が0.5mm〜2mmであってもよい。その他の任意の好適な寸法も適用できる。アレイは、500又は1000を超えるピクセルを有してもよい。
【0044】
[0050] 検出格子9は、少なくとも部分的に、測定ビーム7を受光するように配置され、検出格子9が透過する測定ビーム7の光は検出素子10によって受光される。検出素子10は各々、それぞれの検出素子10が受光する光の量に基づいて測定信号11を提供するように構成される。検出素子10の測定信号11は、処理ユニット4へ供給される。
【0045】
[0051] なお、検出ユニット3の感度を上げるために、各アレイが反射した測定ビーム7の実質的に同じ部分を受光するように配置された検出素子10の複数のアレイを提供してもよい。そのような実施形態では、検出素子の各アレイは、例えばCMOS又はCCDセンサなどの検出素子の単一の連続的なアレイによって形成できる。好ましくは、両方のアレイは同じ又は実質的に同じセンサによって形成される。一実施形態では、一方のアレイがeスポットを受光し、他方がoスポットを受光する。代替策は、両方のスポットから得られる強度を測定する単一セルのアレイを使用する方法である。
【0046】
[0052] さらに、従来の検出ユニット内に存在する捕捉スポットを提供してもよい。
【0047】
[0053] 処理ユニット4は、検出素子10の測定信号11に基づいて測定エリア8内の高さレベルを計算するように構成される。各検出素子10は、測定エリア8の測定サブエリア8aに関連付けられている。それ故、各検出素子10は、測定エリア8のそれぞれの測定サブエリア8aの高さレベルを決定するために使用できる。
【0048】
[0054] 処理ユニット4が各測定サブエリアの高さレベルを計算するように構成されているときには、基板Wの表面の高精度の高さマップを入手できる。
【0049】
[0055] また、複数の検出素子10の測定信号11を用いて、複数の検出素子10の組合せに関連付けられた測定サブエリア8aの組合せでの基板Wの表面の高さレベルを計算できる。複数の測定サブエリアの組合せの高さレベルの計算の結果、1つの高さレベルが計算されるエリアが拡大し、それ故、解像度が低下する。
【0050】
[0056] 一般に、より高い解像度の利点は、得られる基板Wの表面の高さマップがより高精度であるという点である。しかし、解像度が高くなると、リソグラフィ装置の処理ユニットとその他の制御デバイスとが扱わなければならないデータが増加する。解像度に優れた高さマップの場合、基板ステージのレベリング運動によって投影プロセスでの運動が増加する。この結果としてスループットが低下することがある。
【0051】
[0057] 基板の表面では、異なるフィーチャのために異なるエリアが使用される。例えば、基板表面上に存在するか又は投影される幾つかのフィーチャは限界基板/製品エリアであってもよい。これらのエリア内の高さレベルは高精度に決定できる。別のエリアでは、高さレベルはそれほど重要ではなく、及び/又は高さレベルは幾つかの測定サブエリアにまたがってわずかに変化している。これらのエリアでは、より低い解像度が使用される。
【0052】
[0058] さらに、処理ユニット4は、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリア、すなわち、問題エリアが存在する測定サブエリアに関連付けられた検出素子の測定信号を無視するように構成してもよい。そのような問題エリアが既知の製品レイアウトのために既知であるか、又は予想外の測定結果のために検出されたときには、これらのエリアから入手した測定信号を無視できる。高さマップ内では、これらのエリアの高さレベルを、例えば、隣接する測定サブエリアの情報に基づいて塗りつぶすことができる。別の方法では、複数の測定サブエリアの組合せのスポットサイズを選択する際に、問題エリアを除外して問題エリアの影響を低減できる。実際の問題エリアに対応する測定サブエリアを除外でき、問題エリアに近いがその内部にはない測定サブエリアを考慮に入れて基板の高さマップを決定できる。
【0053】
[0059] それ故、レベルセンサ1によってスポットサイズとスポットの場所を製品レイアウトに、例えば、特に関心があるエリアの存在と問題エリアの存在とに、又はフィールドエリア及び/又は製品サイズに適合させることが可能になる。特に、基板表面のフィーチャのレイアウトに応じて解像度を適合させることができる。
【0054】
[0060] ある測定サブエリアの解像度の選択は、2つの原則又はこれら2つの原則の組合せに基づいていてもよい。2つの原則を、以下にフィードフォワード及びフィードバック選択として説明する。
【0055】
[0061] 解像度選択のフィードフォワード原則では、解像度は基板/製品の既知のレイアウトフィーチャに基づいて選択される。フィーチャレイアウトは既知であるため、測定サブエリア内の高さレベルの決定の解像度を測定サブエリアのそれぞれのレイアウトに基づいて選択できる。例えば、限界基板/製品フィーチャでは、解像度は高い値に選択でき、検出素子10の1つ又は少数の測定信号11を用いて関連付けられた測定サブエリア又は測定サブエリアの組合せの高さレベルを計算でき、一方、他の限界からは遠いエリアでは、高さレベルは、より多数の関連付けられた検出素子10の測定信号11に用いて多数の測定サブエリアについて計算される。フィードフォワード原則では、問題エリアも識別でき、問題エリアに対応する測定サブエリアから得た測定信号を測定プロセス中に無視するよう設定できる。
【0056】
[0062] 解像度選択のフィードバック原則では、解像度は、検出ユニット3の検出素子10から得た測定信号11に基づいて選択される。例えば、隣接する検出素子10の測定信号11又はその導関数が同じか又は実質的に同じであるときには、これらの測定サブエリアを1つの高さレベルだけが決定される複数の測定サブエリアの組合せに結合することができる。隣接する検出素子10の測定信号11、又はその導関数が明白に異なるときには、より高い解像度が望ましく、各測定サブエリア又は比較的少数の測定サブエリアの組合せの高さレベルを計算でき、その結果、より高い解像度が得られる。予想外の測定信号11が得られたときには、これらの測定信号11は問題エリアを表すと考えられ、これらの測定信号を無視することができる。なお、予想外の測定信号は例えば、予想外の測定値として、又は隣接する測定検出素子10間の測定値の予想外の差として出現することがある。
【0057】
[0063] 上記のように、フィードフォワード原則とフィードバック原則の組合せも適用できる。例えば、フィードフォワード原則を用いて使用する解像度を計画でき、必要と考えられるときに、解像度はフィードバック原則に基づいて構成される。
【0058】
[0064] 図4は、基板Wの表面の一部の概略平面図を示す。一点鎖線は基板Wの表面上の輪郭を示し、WEで示す線は基板縁部を示す。
【0059】
[0065] 基板Wの表面上に、異なる測定エリア8が示されている。測定エリア81、82、83、84は、レベルセンサ1に対する基板Wの相対位置に関連する。それ故、レベルセンサ1に対する基板Wの4つの異なる位置で、相対位置の対応する測定エリアが示されている。実際、基板Wをレベルセンサ1に沿ってスキャン運動で移動させて基板表面の異なる位置をレベルセンサ1の測定場所に整列させることができる。このスキャン運動を矢印15で示す。測定エリア8が基板表面の全面にわたって移動するようにレベルセンサに対して基板Wを移動させることで、基板Wの実質的に全表面の高さマップが入手できる。
【0060】
[0066] 測定エリア81、82、83、84の各々は、検出素子10のアレイの関連付けられた検出素子10の測定範囲に対応する幾つかの測定サブエリア8aを含む。1つ又は複数の測定サブエリアは、このサブエリア又はサブエリアの組合せの高さレベルを決定するために使用する測定スポットを形成できる。測定スポットは太い実線で示され、下記のように、測定スポットはレイアウト依存であってもよい。
【0061】
[0067] 測定エリア81、82、83、84を以下に詳述する。
【0062】
[0068] 第1の測定エリア81は、高い合焦感度を有するフィーチャ16を含む。高い合焦感度を考慮して、フィーチャ16を含む測定エリア81の部分で高い解像度を有することが望ましい。高い解像度を得るために、この測定エリア81内の各測定サブエリア8aは別々の測定スポットとして選択される。それ故、フィーチャ16に重なる測定サブエリア8aに関連付けられた検出素子10の各々の測定信号11を用いてそれぞれの測定サブエリア8aの高さレベルが提供される。測定エリア81の残りでは、より低い解像度で十分であり、3つの測定スポットを用いて測定エリア81のこの残りの部分を扱うことができる。
【0063】
[0069] 第2の測定エリア82は、問題エリア71の一部を含む。この問題エリアから得られる測定信号を用いて基板Wの表面の高さレベルを計算することは望ましくない。処理ユニット4は、問題エリア17を含む測定エリア82のこの部分に関連付けられた検出素子10の測定信号11を無視するように構成される。測定エリア82の残りは4つの測定スポットに分割されて、このエリアでの所望の解像度を得る。基板表面の高さマップでは、問題エリアに隣接する測定スポットについて計算された高さレベルに基づいて、問題エリアの高さレベルを計算することができる。
【0064】
[0070] 第3の測定エリア83は、高い合焦感度を有するフィーチャ16の部分と問題エリア17の両方を含む。測定エリア81に対応して、フィーチャ16に重なる測定エリア83の解像度は比較的高い値に選択され、これによって、各測定サブエリア8aについて、別々の高さレベルが計算される。測定エリア82に対応して、問題エリア17に重なる測定エリア83の部分の測定信号11は無視される。測定エリアの残りの部分は同様の測定スポットに分割され、その結果、上記エリアについて解像度が選択される。しかし、解像度は任意の所望のレベルで選択してもよい。
【0065】
[0071] 第4の測定エリア84は基板縁部WEを含んで延在し、基板Wの表面の部分的に外側で下がっている。基板Wの表面の外側の測定エリアの部分は、この部分に関連付けられた検出素子10から得た測定信号11が高さレベルの計算で信頼性がない結果を提供するため、やはり問題エリアと見なされる。本発明のレベルセンサ1を用いて、基板縁部WEのごく近くで、また所望であれば、高い解像度で高さレベルを決定できるように、測定スポットを正確に選択できる。測定エリア84の残りは、各測定スポットに使用される検出素子11の数を選択することで所望の解像度で測定できる。
【0066】
[0072] 選択された解像度で基板表面上の各場所の高さレベルを決定することで、基板表面全体の高さマップを得ることができる。
【0067】
[0073] 以上、本発明のレベルセンサのある実施形態を論じてきた。レベルセンサは、任意の所望のパラメータに応じて解像度を選択できるという利点を有する。それによって、1つの測定サブエリア又は複数のサブエリアの組合せから構成された測定スポットを使用できる。これらの測定スポットは同じサイズでなくてもよい。選択されたスポットは基板Wのフィーチャレイアウトに依存し、スポットのサイズは動的に調整できる。さらに、測定スポットと解像度は過去のレベリングされたウェーハ及び/又は過去のレベリングされたエリアなどの履歴データに用いて選択できるので、ウェーハ間履歴データ及び/又はフィールド間指紋データを考慮することができる。
【0068】
[0074] 解像度、それ故、スポット数、スポットの位置及び個別のスポットサイズの選択におけるこの自由によって、ウェーハマッピングのルート選択が原則的にレイアウトから独立した状態で全フィールドのフィールドエリアの同じ有効範囲が確保される。この結果、予測可能な高いスループットが生まれる。
【0069】
[0075] さらに、動的なスポット選択によって、製品レイアウトにかかわらず、合焦縁部クリアランスエリア(FECエリア:focus edge clearance area)までのウェーハエリアの有効範囲が可能になる。これによって、Z、Ry露光設定点を作成する少なくとも2つのデータスポットを有することができ、縁部での合焦性能が改善される。
【0070】
[0076] さらに、寸法が小さく、高いプロセス依存性がある特定の領域は、対応する検出素子を使用しないことで無視できる。必要なときには、補間を用いて無視されたエリアを充填できる。
【0071】
[0077] 横方向の高い解像度によって、基板/製品フィーチャの合焦感度部分に対するレベルセンサエリアの有効範囲をカスタム化できる。例えば、合焦限界部分をより高い解像度で、すなわち、他のエリアよりも多くのスポットを用いて測定して潜在的な合焦エラーを低減できる。スポットのサイズは、製品の特定のフィーチャに合わせることができる。特に、縁部クリアランス周囲の高い解像度を達成できる。
【0072】
[0078] 本発明の方法を用いて、処理負荷を適合できる。例えば、30mmのフィールドを12mmの2つのエリアと6mmの1つのエリアとに分解できる。強度は「スポットごとに」増加し、処理負荷は、上述した従来のレベルセンサのケースでの9スポットではなく、3スポットの処理と同等である。スポット数は必要に応じて、例えば、機種と絶えず改善されているハードウェア処理能力とに応じて調整可能である。
【0073】
[0079] 本発明のレベルセンサを用いて、診断又は研究目的で高解像度の高さマップを製造できる。例えば、より高い横方向の精度に基づいてウェーハテーブルの洗浄とウェーハ負荷のオフセットとを実行できる。また、ウェーハが完全に連続して有効範囲内にあるので、ロット生産中のスポット検出だけでなく合焦スポットモニタリングも改善できる。
【0074】
[0080] 図示の実施形態では、従来のフォトダイオードの代わりに検出素子10の感光性アレイの使用が提案される。この実施形態は、SNRの低下という利点がある。従来のフォトダイオードはスポットの位置許容差に対処するために比較的大きい必要があり、ダークノイズが増加した。従来のフォトダイオードの代わりに選択された検出素子10からの信号のみを使用する機会と共に本発明による感光性アレイを用いるときには、ダークノイズは低減でき、例えば、SNRが改善する。
【0075】
[0081] ピクセルアレイを使用する1つの有り得る問題は、波長依存感度の可能性である。PDA(フォトダイオードアレイ)上のパッシベーション層の製造のばらつきのために、フォトダイオード各々の対は現在、波長あたり厳密に一致している。市販のアレイの場合、使用はそれほど厳密に管理されていない。多数のピクセルからの読み取り値を組み合わせることでこれらの差は平均化できる。そうでなければ、1つの方法として差の較正がある。別の方法は、広帯域光を感受し、単一の波長で放出する中間変換層の提供である。これによって照合ははるかに容易になり、市販のCMOSアレイの使用が可能になる余地が生じる。
【0076】
[0082] 図5は、スペクトル的に光センサ応答を分解するために、感光性アレイによる検知の前に光をスペクトル的に分解するデバイスが提供される別の実施形態を示す。同図は、測定エリアからの反射の後に(オプションとして)反射ビーム510を異常成分520eと正常成分520oとに分割する検出器格子500を示す。プリズム525(又は、格子などの、光線をスペクトル的に分解できるその他のデバイス)が提供される。結果として得られるスペクトル的に分解された光線530e、530oは、感光性検出器アレイ540を用いて検出される。感光性検出器アレイ540は、2つのアレイ550a、550bと捕捉スポット560のためのオプションの検出器とを備えるように見える(この特定の実施形態では)。
【0077】
[0083] この実施形態では、感光性アレイ上のx方向はウェーハ上のx位置を分解する。感光性アレイ上のy方向は波長を分解する。波長が分かっていると、プロセス依存性をさらに低減する助けになるウェーハ高さ再構築の可能性が高まる。ウェーハ高さの計算時にスペクトル成分を別々に重み付けすることができる。例えば、ウェーハ高さの計算時に、測定された製品を感受する波長の寄与により小さい重みを与えてもよい(又は完全に割り引いてもよい)。あるいは、ある種の製品スタックについてプロセス依存性を無視できる波長の特定の組合せを選択できる。全ての波長はレベルセンサ光学ハードウェアによって完全に事前決定された重みを与えられるため、現在、この方法は不可能である。
【0078】
[0084] 上記に鑑みて、本発明によるレベルセンサは、測定エリア内の基板表面の1つ又は複数の高さレベルの決定に関して、また基板表面の高さマップの決定に多大な融通性と信頼性とを提供すると結論することができる。
【0079】
[0085] 本文ではICの製造におけるリソグラフィ装置の使用に特に言及しているが、本明細書で説明するリソグラフィ装置には他の用途もあることを理解されたい。例えば、これは、集積光学システム、磁気ドメインメモリ用誘導及び検出パターン、フラットパネルディスプレイ、液晶ディスプレイ(LCD)、薄膜磁気ヘッドなどの製造である。こうした代替的な用途に照らして、本明細書で「ウェーハ」又は「ダイ」という用語を使用している場合、それぞれ、「基板」又は「ターゲット部分」という、より一般的な用語と同義と見なしてよいことが、当業者には認識される。本明細書に述べている基板は、露光前又は露光後に、例えばトラック(通常はレジストの層を基板に塗布し、露光したレジストを現像するツール)、メトロロジーツール及び/又はインスペクションツールで処理することができる。適宜、本明細書の開示は、以上及びその他の基板処理ツールに適用することができる。さらに基板は、例えば多層ICを生成するために、複数回処理することができ、したがって本明細書で使用する基板という用語は、既に複数の処理済み層を含む基板も指すことができる。
【0080】
[0086] 光リソグラフィの分野での本発明の実施形態の使用に特に言及してきたが、本発明は文脈によってはその他の分野、例えばインプリントリソグラフィでも使用することができ、光リソグラフィに限定されないことを理解されたい。インプリントリソグラフィでは、パターニングデバイス内のトポグラフィが基板上に作成されたパターンを画定する。パターニングデバイスのトポグラフィは基板に供給されたレジスト層内に刻印され、電磁放射、熱、圧力又はそれらの組合せを印加することでレジストは硬化する。パターニングデバイスはレジストから取り除かれ、レジストが硬化すると、内部にパターンが残される。
【0081】
[0087] 本明細書で使用する「放射」及び「ビーム」という用語は、イオンビーム又は電子ビームなどの粒子ビームのみならず、紫外線(UV)放射(例えば、365nm、248nm、193nm、157nm若しくは126nm、又はこれら辺りの波長を有する)及び極端紫外線光(EUV)放射(例えば、5nm〜20nmの範囲の波長を有する)を含むあらゆるタイプの電磁放射を網羅する。
【0082】
[0088] 「レンズ」という用語は、状況が許せば、屈折、反射、磁気、電磁及び静電光学コンポーネントを含む様々なタイプの光学コンポーネントのいずれか一つ、又はその組合せを指すことができる。
【0083】
[0089] 以上、本発明の特定の実施形態を説明したが、説明とは異なる方法でも本発明を実践できることが理解される。例えば、本発明は、上記で開示したような方法を述べる機械読み取り式命令の1つ又は複数のシーケンスを含むコンピュータプログラム、又はこのようなコンピュータプログラムを内部に記憶したデータ記憶媒体(例えば半導体メモリ、磁気又は光ディスク)の形態をとることができる。
【0084】
[0090] 上記の説明は例示的であり、限定的ではない。それ故、下記に示す特許請求の範囲から逸脱することなく、記載されたような本発明を変更できることが当業者には明白である。
【特許請求の範囲】
【請求項1】
基板の表面の高さレベルを決定するレベルセンサであって、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上での反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、レベルセンサ。
【請求項2】
前記処理ユニットは、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリアに関連付けられた検出素子の測定信号を無視する、請求項1に記載のレベルセンサ。
【請求項3】
前記処理ユニットは、前記測定エリア内の第1の数の複数の測定サブエリアの第1の組合せの第1の高さレベルを計算し、前記測定エリア内の第2の数の複数の測定サブエリアの第2の組合せの第2の高さレベルを計算し、前記第1の数と第2の数が異なり、前記第1の組合せと前記第2の組合せ内の前記選択された解像度に基づいて選択される、請求項1に記載のレベルセンサ。
【請求項4】
前記検出素子アレイは、検出素子の単一の連続的なアレイである、請求項1に記載のレベルセンサ。
【請求項5】
前記検出素子アレイは、CMOS又はCCDセンサである、請求項1に記載のレベルセンサ。
【請求項6】
前記測定ビームは、全測定エリアを覆う単一の測定ビームである、請求項1に記載のレベルセンサ。
【請求項7】
前記投影ユニットは、前記測定ビームを受光し、前記測定ビームにパターンを付与する投影格子を備え、
前記検出ユニットは、前記測定ビームが前記検出素子アレイによって受光される前に、前記反射した測定ビームを受光する、請求項1に記載のレベルセンサ。
【請求項8】
前記測定エリアでの前記解像度は、前記検出素子の前記測定信号の1つ以上に基づいて選択される、請求項1に記載のレベルセンサ。
【請求項9】
前記測定エリアでの前記解像度は、前記基板表面上のフィーチャレイアウトに基づいて選択される、請求項1に記載のレベルセンサ。
【請求項10】
前記測定エリアでの前記解像度は、履歴データに基づいて選択される、請求項1又は2に記載のレベルセンサ。
【請求項11】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項10に記載のレベルセンサ。
【請求項12】
前記検出ユニットは、前記測定ビームを正常成分と異常成分とに分割し、前記正常及び異常成分を別々に検出するように動作可能である、請求項1から11のいずれかに記載のレベルセンサ。
【請求項13】
前記処理ユニットは、前記正常成分と異常成分との強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算するように動作可能である、請求項12に記載のレベルセンサ。
【請求項14】
前記検出ユニットは、前記反射した測定ビームをスペクトル的に分解するスペクトル分解装置を備える、請求項1から13のいずれかに記載のレベルセンサ。
【請求項15】
前記検出素子アレイの第1の方向が前記測定エリア上の位置を分解し、前記第1の方向に垂直な前記検出素子アレイの第2の方向が前記測定ビームの波長を分解するように動作可能である、請求項14に記載のレベルセンサ。
【請求項16】
前記処理ユニットは、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用するように動作可能である、請求項14又は15に記載のレベルセンサ。
【請求項17】
リソグラフィプロセスで使用する基板の高さマップを決定する方法であって、
請求項1のレベルセンサを提供するステップと、
基板を提供するステップと、
測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定するステップであって、
前記投影ユニットによって前記基板上に測定ビームを投影することと、
前記検出ユニットによって前記反射ビームを受光することと、
測定エリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算することとを含むステップと
を含む、方法。
【請求項18】
前記基板上の複数の測定エリアについて前記測定スポットを繰り返して前記基板の全表面の高さマップを取得するステップを含む、請求項17に記載の方法。
【請求項19】
前記測定エリアでの前記解像度は前記検出素子の前記測定信号の1つ以上に基づいて選択され、及び/又は前記測定エリアでの前記解像度は前記基板表面のフィーチャレイアウトに基づいて選択される、請求項17に記載の方法。
【請求項20】
前記測定エリアでの前記解像度は、履歴データに基づいて選択される、請求項17に記載の方法。
【請求項21】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項20に記載の方法。
【請求項22】
前記測定ビームを正常成分と異常成分とに分割することと、前記正常及び異常成分を別々に検出することとを含む、請求項17から21のいずれかに記載の方法。
【請求項23】
前記正常成分と異常成分との強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算することを含む、請求項22に記載の方法。
【請求項24】
前記反射した測定ビームをスペクトル的に分解することと、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用することとを含む、請求項17から23のいずれかに記載の方法。
【請求項25】
リソグラフィ装置であって、
放射ビームを調節する照明システムと、
前記放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持する支持体と、
基板を保持する基板テーブルと、
前記基板のターゲット部分上に前記パターン付放射ビームを投影する投影システムとを備え、
前記リソグラフィ装置は、前記基板テーブル上に支持された基板の表面の高さレベルを決定するレベルセンサを備え、該レベルセンサは、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上の反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて、前記測定エリア内の高さレベルを計算する処理ユニットと
を備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、リソグラフィ装置。
【請求項26】
基板の表面の高さレベルを決定するレベルセンサであって、
投影ユニットによって投影されたビームの前記基板の測定エリアからの反射によって得られる測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、レベルセンサ。
【請求項27】
前記処理ユニットは、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリアに関連付けられた検出素子の測定信号を無視する、請求項26に記載のレベルセンサ。
【請求項28】
前記処理ユニットは、前記測定エリア内の第1の数の複数の測定サブエリアの第1の組合せの第1の高さレベルを計算し、前記測定エリア内の第2の数の複数の測定サブエリアの第2の組合せの第2の高さレベルを計算し、前記第1の数と第2の数が異なり、前記第1の組合せと前記第2の組合せ内の前記選択された解像度に基づいて選択される、請求項26に記載のレベルセンサ。
【請求項29】
前記検出素子のアレイは、検出素子の単一の連続的なアレイである、請求項26に記載のレベルセンサ。
【請求項30】
前記検出素子のアレイは、CMOS又はCCDセンサである、請求項26に記載のレベルセンサ。
【請求項31】
前記測定ビームは、全測定エリアを覆う単一の測定ビームである、請求項26に記載のレベルセンサ。
【請求項32】
前記投影ユニットは、前記ビームにパターンを付与する投影格子を備え、前記検出ユニットは、前記測定ビームが前記検出素子のアレイによって受光される前に、前記測定ビームを受光する検出格子を備える、請求項26に記載のレベルセンサ。
【請求項33】
前記測定エリアの前記解像度は、前記検出素子の前記測定信号の1つ以上に基づいて選択される、請求項26に記載のレベルセンサ。
【請求項34】
前記測定エリアの前記解像度は、前記基板表面上のフィーチャレイアウトに基づいて選択される、請求項26に記載のレベルセンサ。
【請求項35】
前記測定エリアの前記解像度は、履歴データに基づいて選択される、請求項26に記載のレベルセンサ。
【請求項36】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項35に記載のレベルセンサ。
【請求項37】
前記検出ユニットは、前記測定ビームを正常成分と異常成分とに分割し、前記正常及び異常成分を別々に検出するように動作可能である、請求項26から36のいずれかに記載のレベルセンサ。
【請求項38】
前記処理ユニットは、前記正常成分と異常成分との前記強度コントラストに基づいて測定エリア内の前記高さレベルを計算するように動作可能である、請求項37に記載のレベルセンサ。
【請求項39】
前記検出ユニットは、前記反射した測定ビームをスペクトル的に分解するスペクトル分解装置を備える、請求項26から38のいずれかに記載のレベルセンサ。
【請求項40】
前記検出素子のアレイの第1の方向が前記測定エリア上の位置を分解し、前記第1の方向に垂直な前記検出素子のアレイの第2の方向が前記測定ビームの波長を分解するように動作可能である、請求項39に記載のレベルセンサ。
【請求項41】
前記処理ユニットは、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用するように動作可能である、請求項39又は40に記載のレベルセンサ。
【請求項42】
基板の測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定する方法であって、
前記投影ユニットによって前記基板上に測定ビームを投影するステップと、
前記検出ユニットによって前記反射したビームを受光するステップと、
前記測定エリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するステップと
を含む、方法。
【請求項43】
前記基板上の複数の前記測定エリアについて測定スポットを繰り返して前記基板の全表面の高さマップを入手するステップを含む、請求項42に記載の方法。
【請求項44】
前記測定エリアでの前記解像度は前記検出素子の前記測定信号の1つ以上に基づいて選択され、及び/又は前記測定エリアでの前記解像度は前記基板表面のフィーチャレイアウトに基づいて選択される、請求項42に記載の方法。
【請求項45】
前記測定エリアでの解像度は、履歴データに基づいて選択される、請求項42に記載の方法。
【請求項46】
前記履歴データでは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項45に記載の方法。
【請求項47】
前記測定ビームを正常成分と異常成分とに分割することと、前記正常及び異常成分を別々に検出することとを含む、請求項42から46のいずれかに記載の方法。
【請求項48】
前記正常成分と異常成分との前記強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算することを含む、請求項47に記載の方法。
【請求項49】
前記反射した測定ビームをスペクトル的に分解することと、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用することとを含む、請求項42から48のいずれかに記載の方法。
【請求項50】
リソグラフィ装置であって、
放射ビームを調節する照明システムと、
前記放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持する支持体と、
基板を保持する基板テーブルと、
前記基板のターゲット部分上に前記パターン付放射ビームを投影する投影システムとを備え、
前記リソグラフィ装置は、前記基板テーブル上に支持された基板の表面の高さレベルを決定するレベルセンサを備え、該レベルセンサは、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上の反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて、前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、リソグラフィ装置。
【請求項1】
基板の表面の高さレベルを決定するレベルセンサであって、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上での反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、レベルセンサ。
【請求項2】
前記処理ユニットは、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリアに関連付けられた検出素子の測定信号を無視する、請求項1に記載のレベルセンサ。
【請求項3】
前記処理ユニットは、前記測定エリア内の第1の数の複数の測定サブエリアの第1の組合せの第1の高さレベルを計算し、前記測定エリア内の第2の数の複数の測定サブエリアの第2の組合せの第2の高さレベルを計算し、前記第1の数と第2の数が異なり、前記第1の組合せと前記第2の組合せ内の前記選択された解像度に基づいて選択される、請求項1に記載のレベルセンサ。
【請求項4】
前記検出素子アレイは、検出素子の単一の連続的なアレイである、請求項1に記載のレベルセンサ。
【請求項5】
前記検出素子アレイは、CMOS又はCCDセンサである、請求項1に記載のレベルセンサ。
【請求項6】
前記測定ビームは、全測定エリアを覆う単一の測定ビームである、請求項1に記載のレベルセンサ。
【請求項7】
前記投影ユニットは、前記測定ビームを受光し、前記測定ビームにパターンを付与する投影格子を備え、
前記検出ユニットは、前記測定ビームが前記検出素子アレイによって受光される前に、前記反射した測定ビームを受光する、請求項1に記載のレベルセンサ。
【請求項8】
前記測定エリアでの前記解像度は、前記検出素子の前記測定信号の1つ以上に基づいて選択される、請求項1に記載のレベルセンサ。
【請求項9】
前記測定エリアでの前記解像度は、前記基板表面上のフィーチャレイアウトに基づいて選択される、請求項1に記載のレベルセンサ。
【請求項10】
前記測定エリアでの前記解像度は、履歴データに基づいて選択される、請求項1又は2に記載のレベルセンサ。
【請求項11】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項10に記載のレベルセンサ。
【請求項12】
前記検出ユニットは、前記測定ビームを正常成分と異常成分とに分割し、前記正常及び異常成分を別々に検出するように動作可能である、請求項1から11のいずれかに記載のレベルセンサ。
【請求項13】
前記処理ユニットは、前記正常成分と異常成分との強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算するように動作可能である、請求項12に記載のレベルセンサ。
【請求項14】
前記検出ユニットは、前記反射した測定ビームをスペクトル的に分解するスペクトル分解装置を備える、請求項1から13のいずれかに記載のレベルセンサ。
【請求項15】
前記検出素子アレイの第1の方向が前記測定エリア上の位置を分解し、前記第1の方向に垂直な前記検出素子アレイの第2の方向が前記測定ビームの波長を分解するように動作可能である、請求項14に記載のレベルセンサ。
【請求項16】
前記処理ユニットは、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用するように動作可能である、請求項14又は15に記載のレベルセンサ。
【請求項17】
リソグラフィプロセスで使用する基板の高さマップを決定する方法であって、
請求項1のレベルセンサを提供するステップと、
基板を提供するステップと、
測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定するステップであって、
前記投影ユニットによって前記基板上に測定ビームを投影することと、
前記検出ユニットによって前記反射ビームを受光することと、
測定エリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算することとを含むステップと
を含む、方法。
【請求項18】
前記基板上の複数の測定エリアについて前記測定スポットを繰り返して前記基板の全表面の高さマップを取得するステップを含む、請求項17に記載の方法。
【請求項19】
前記測定エリアでの前記解像度は前記検出素子の前記測定信号の1つ以上に基づいて選択され、及び/又は前記測定エリアでの前記解像度は前記基板表面のフィーチャレイアウトに基づいて選択される、請求項17に記載の方法。
【請求項20】
前記測定エリアでの前記解像度は、履歴データに基づいて選択される、請求項17に記載の方法。
【請求項21】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項20に記載の方法。
【請求項22】
前記測定ビームを正常成分と異常成分とに分割することと、前記正常及び異常成分を別々に検出することとを含む、請求項17から21のいずれかに記載の方法。
【請求項23】
前記正常成分と異常成分との強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算することを含む、請求項22に記載の方法。
【請求項24】
前記反射した測定ビームをスペクトル的に分解することと、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用することとを含む、請求項17から23のいずれかに記載の方法。
【請求項25】
リソグラフィ装置であって、
放射ビームを調節する照明システムと、
前記放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持する支持体と、
基板を保持する基板テーブルと、
前記基板のターゲット部分上に前記パターン付放射ビームを投影する投影システムとを備え、
前記リソグラフィ装置は、前記基板テーブル上に支持された基板の表面の高さレベルを決定するレベルセンサを備え、該レベルセンサは、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上の反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて、前記測定エリア内の高さレベルを計算する処理ユニットと
を備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するように構成された、リソグラフィ装置。
【請求項26】
基板の表面の高さレベルを決定するレベルセンサであって、
投影ユニットによって投影されたビームの前記基板の測定エリアからの反射によって得られる測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、レベルセンサ。
【請求項27】
前記処理ユニットは、高さレベルが望ましくなく、信頼性がなく、及び/又は基板表面の高さマップに関連しない測定サブエリアに関連付けられた検出素子の測定信号を無視する、請求項26に記載のレベルセンサ。
【請求項28】
前記処理ユニットは、前記測定エリア内の第1の数の複数の測定サブエリアの第1の組合せの第1の高さレベルを計算し、前記測定エリア内の第2の数の複数の測定サブエリアの第2の組合せの第2の高さレベルを計算し、前記第1の数と第2の数が異なり、前記第1の組合せと前記第2の組合せ内の前記選択された解像度に基づいて選択される、請求項26に記載のレベルセンサ。
【請求項29】
前記検出素子のアレイは、検出素子の単一の連続的なアレイである、請求項26に記載のレベルセンサ。
【請求項30】
前記検出素子のアレイは、CMOS又はCCDセンサである、請求項26に記載のレベルセンサ。
【請求項31】
前記測定ビームは、全測定エリアを覆う単一の測定ビームである、請求項26に記載のレベルセンサ。
【請求項32】
前記投影ユニットは、前記ビームにパターンを付与する投影格子を備え、前記検出ユニットは、前記測定ビームが前記検出素子のアレイによって受光される前に、前記測定ビームを受光する検出格子を備える、請求項26に記載のレベルセンサ。
【請求項33】
前記測定エリアの前記解像度は、前記検出素子の前記測定信号の1つ以上に基づいて選択される、請求項26に記載のレベルセンサ。
【請求項34】
前記測定エリアの前記解像度は、前記基板表面上のフィーチャレイアウトに基づいて選択される、請求項26に記載のレベルセンサ。
【請求項35】
前記測定エリアの前記解像度は、履歴データに基づいて選択される、請求項26に記載のレベルセンサ。
【請求項36】
前記履歴データは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項35に記載のレベルセンサ。
【請求項37】
前記検出ユニットは、前記測定ビームを正常成分と異常成分とに分割し、前記正常及び異常成分を別々に検出するように動作可能である、請求項26から36のいずれかに記載のレベルセンサ。
【請求項38】
前記処理ユニットは、前記正常成分と異常成分との前記強度コントラストに基づいて測定エリア内の前記高さレベルを計算するように動作可能である、請求項37に記載のレベルセンサ。
【請求項39】
前記検出ユニットは、前記反射した測定ビームをスペクトル的に分解するスペクトル分解装置を備える、請求項26から38のいずれかに記載のレベルセンサ。
【請求項40】
前記検出素子のアレイの第1の方向が前記測定エリア上の位置を分解し、前記第1の方向に垂直な前記検出素子のアレイの第2の方向が前記測定ビームの波長を分解するように動作可能である、請求項39に記載のレベルセンサ。
【請求項41】
前記処理ユニットは、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用するように動作可能である、請求項39又は40に記載のレベルセンサ。
【請求項42】
基板の測定エリア内のサブエリア又はサブエリアの組合せの高さレベルを決定する方法であって、
前記投影ユニットによって前記基板上に測定ビームを投影するステップと、
前記検出ユニットによって前記反射したビームを受光するステップと、
前記測定エリアでの選択された解像度に応じて、関連付けられた検出素子の測定信号に基づいて測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた複数の検出素子の測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算するステップと
を含む、方法。
【請求項43】
前記基板上の複数の前記測定エリアについて測定スポットを繰り返して前記基板の全表面の高さマップを入手するステップを含む、請求項42に記載の方法。
【請求項44】
前記測定エリアでの前記解像度は前記検出素子の前記測定信号の1つ以上に基づいて選択され、及び/又は前記測定エリアでの前記解像度は前記基板表面のフィーチャレイアウトに基づいて選択される、請求項42に記載の方法。
【請求項45】
前記測定エリアでの解像度は、履歴データに基づいて選択される、請求項42に記載の方法。
【請求項46】
前記履歴データでは、ウェーハ間データ及び/又はフィールド間指紋データを含む、請求項45に記載の方法。
【請求項47】
前記測定ビームを正常成分と異常成分とに分割することと、前記正常及び異常成分を別々に検出することとを含む、請求項42から46のいずれかに記載の方法。
【請求項48】
前記正常成分と異常成分との前記強度コントラストに基づいて前記測定エリア内の前記高さレベルを計算することを含む、請求項47に記載の方法。
【請求項49】
前記反射した測定ビームをスペクトル的に分解することと、前記測定エリア内の前記高さレベルの計算時に前記検出済み測定ビームの異なるスペクトル成分に重み付けを選択的に適用することとを含む、請求項42から48のいずれかに記載の方法。
【請求項50】
リソグラフィ装置であって、
放射ビームを調節する照明システムと、
前記放射ビームの断面にパターンを付与してパターン付放射ビームを形成することができるパターニングデバイスを支持する支持体と、
基板を保持する基板テーブルと、
前記基板のターゲット部分上に前記パターン付放射ビームを投影する投影システムとを備え、
前記リソグラフィ装置は、前記基板テーブル上に支持された基板の表面の高さレベルを決定するレベルセンサを備え、該レベルセンサは、
前記基板の測定エリア上に測定ビームを投影する投影ユニットと、
前記基板上の反射後に前記測定ビームを受光する検出ユニットと、
前記反射した測定ビームに基づいて、前記測定エリア内の高さレベルを計算する処理ユニットとを備え、
前記検出ユニットは、各検出素子が前記測定エリアの測定サブエリア上で反射した前記測定ビームの一部を受光する検出素子アレイを備え、該それぞれの検出素子によって受光された前記測定ビームの前記部分に基づいて測定信号を提供し、
前記処理ユニットは、前記測定サブエリアでの選択された解像度に応じて、関連付けられた検出素子の前記測定信号に基づいて前記測定サブエリアの高さレベルを計算し、又は複数の測定サブエリアの組合せに関連付けられた前記複数の検出素子の前記測定信号に基づいて前記測定エリア内の複数の測定サブエリアの組合せの高さレベルを計算する、リソグラフィ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−110398(P2013−110398A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−234536(P2012−234536)
【出願日】平成24年10月24日(2012.10.24)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2012−234536(P2012−234536)
【出願日】平成24年10月24日(2012.10.24)
【出願人】(504151804)エーエスエムエル ネザーランズ ビー.ブイ. (1,856)
【Fターム(参考)】
[ Back to top ]