
レーザによる組織の処置を監視および制御するための方法および装置
本発明は、光による組織の処置を制御するための改良された方法および装置を提供する。本発明の種々の態様によれば、本発明は、処置プロセスの大いなる安全性、有効性、均一性、および連続性を可能にする光ビームの動作パラメータの改良されたリアルタイム制御を提供する。

【発明の詳細な説明】
【発明の詳細な説明】
【0001】
(関連出願)
この出願は、2003年12月23日付の米国特許出願第10/745,761号「Method and Apparatus for Monitoring and Controlling Laser‐Induced Tissue Treatment」の部分継続出願であり、さらに2003年12月31日付の米国特許出願第10/750,790号「High Speed, High Efficiency Optical Pattern Generator Using Rotating Optical Element」の部分継続出願でもあり、さらには2004年8月26日付の米国特許仮出願第60/602,092号「Method and Apparatus for Monitoring and Controlling Laser‐Induced Tissue Treatment」について、米国特許法第119条(e)項のもとでの優先権を主張する。上記の出願はすべて、参考として本明細書中に援用される。
【技術分野】
【0002】
本発明は、皮膚組織の処置又は治療(treatment)のための方法および装置に関し、さらに詳しくは、光源と、ハンドピースと、ハンドピースの運動を測定するための手段との組み合わせを有して、組織の処置又は治療を制御するために利用される方法および装置に関する。
【背景技術】
【0003】
レーザおよび他の強力な光源が、皮膚組織の処置など、さまざまな種類の組織の処置に使用されている。光を利用する皮膚組織の処置においては、光ビームによって患者の皮膚表面が照射される。一般に、このような処置のために使用されるレーザは、例えば水など、皮膚内の自然の発色団のうちの1つによって吸収される波長で動作する。水が主たる発色団である場合には、細胞水および間隙水が光のエネルギーを吸収し、この光のエネルギーを熱エネルギーへと変換する。処置の際の組織における熱エネルギーの輸送は、光ビームの動作パラメータによってさまざまである伝導、対流、放射、代謝、蒸発、および相変化がかかわる複雑なプロセスである。このような手順においては、目標とする組織領域の下方または周囲の組織に損傷を与えないことが必須である。波長、出力、光の強度、パルスの継続時間、放射の速度、などの光ビームの光学的な動作パラメータが適切に選択されるならば、患者の皮膚の細胞水および間隙水が加熱され、温度の上昇が引き起こされて、所望の皮膚科学的効果が生み出される。対照的に、光学的な動作パラメータの選択が不適切である場合には、組織の処置不足または処置過剰が生じうる。したがって、光が適切なフルエンス(fluence)を備えて一様かつ制御可能なやり方で組織へと届けられるよう、処置において使用される光学的な動作パラメータを、精密に制御することが望まれる。レーザ・ビームの出力、強度、継続時間、などを賢明に制御するさまざまな装置が、提案されてきている。しかしながら、さらに詳しく後述するように、それらの装置の適用は、かなりの欠点を抱えている。
【0004】
皮膚組織の処置のための公知の装置は、ハンドピースと称されることもある手持ち式のデリバリ装置を備えている。ハンドピースは、それを使用して医師が組織へと処置を施す好都合な手段である。処置の際、光を発するハンドピースが、医師の手によって処置すべき組織に沿って動かされる。このような装置からの処置のレベルは、典型的には、光ビームの動作パラメータを手動で選択することによって前もって設定される。例えば出力レベル、エネルギー、パルスの頻度、温度、光の強度、および電流などといった動作パラメータが、処置プロセス全体の処置の程度を決定する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
いくつかの既存のハンドピースの欠点の1つは、安全であり、一様であり、かつ効果的な処置という制約の範囲内にとどまるために、ハンドピースを位置決めする際、および制御のもとで移動させる際に、厳格な正確さを必要とする点にある。理論的には、厳格な正確さは、処置を行なう医師の高度な熟練、注意、および器用さによって達成することができる。しかしながら、実際の施術においては、手作業によるハンドピースの適用および制御は、人間の手の運動の不正確さおよび無意識さ、ならびに/あるいは不均一な組織の表面ゆえに、容易に一様ではない処置という結果につながりうる。これにより、対象とする組織のいくらかの領域が処置不足になり、あるいは処置過剰になることがしばしばである。
【0006】
公知のハンドピースの典型的なアプローチは、皮膚組織のより大きな領域を処置するため、手作業にて皮膚の一領域から他の領域へとパッチワーク状の様相で動かされる巨視的なパルス状の処置ビームを生成することにある。このようなアプローチは、処置対象の皮膚表面に対する個々の処置の位置決めの不正確さに関連し、アーチファクト(artifacts)および鋭い境界が生み出されるという欠点を有している。
【0007】
公知のハンドピースの他の欠点は、上述のように、選択された処置のレベルを決定するレーザの動作パラメータが、典型的には、処置の全手順について前もって1度だけ設定される点にある。各患者の個々の組織の特性が、処置に先立って予備的な組織の評価にもとづいて因子として取り入れられ、それら所定の動作パラメータを使用して処置を進めることができる。
【0008】
例えば、いくつかの既存のハンドピース装置は、ハンドピースの移動の速度を医師へと知らせるフィードバックをもたらし、医師が処置の速度を調節できるようにしている。しかしながら、このハンドピース装置は、あらかじめ選択された動きの速度で処置を行なうことを、医師に要求している。この装置の欠点は、医師をただ1つの処置速度に拘束する点にある。例えば、頬などの大きくて平坦な領域においては、高速度での処置が望まれる。唇などの高度に入り組んだ領域については、より低い速度での処置が望ましい。医師をあらかじめ選択された動きの速度に拘束することで、顔など、広くて平坦な領域および高度に入り組んだ領域の両者を密に近接して備えている領域を処置するときに、医師の自由度が制限されてしまう。さらには、ハンドピースの速度が処置手順の最中に変化する場合、この装置は、移動の速度の変化を補償すべく自身の動作パラメータの自動調節を提供することがなく、したがって不均一な処置につながる。
【0009】
皮膚または美容外科の分野において使用されるロボット手段の適用は、人間の不正確さという限界の克服を可能にする。しかしながら、典型的な従来のロボット装置の欠点の1つは、処置において医師が提供する必要な指示および判断を欠く点にある。ロボットは正確であるが、典型的には、処置の際に複雑な選択を行ない、あるいは予測されていない状況に反応するほどには、充分に賢くはない。さらに、ロボットは、審美的な意味での医師の裁量の余地を奪い去ってしまう。
【0010】
典型的な従来のロボット装置のさらなる欠点は、処置の全体において、患者を完全に動かぬようにしておく必要がある点にある。あるいは、患者の動きを補償するために、高度な画像安定化システムを使用しなければならない。このようなロボット装置のさらに他の欠点は、それらがかさばり、移動のための余地があまり許されていない領域に関して、処置位置へと容易に移動させることができない点にある。むしろ、処置を行なうことができるようになるために、まず処置しようとする組織の表面を、特定の位置へと装置に対して移動させなければならない。
【0011】
本発明は、これら既存のレーザによるハンドピース装置およびロボットに関する問題を大幅に軽減する方法および装置を提供する。
【0012】
本発明は、光による組織の処置を制御するための優れた方法および装置であって、従来技術の欠点の多くを克服する方法および装置を提供する。現在知られている皮膚の組織の処置のための技法の欠点に対処する本発明のやり方を、本明細書において詳しく説明する。本発明の種々の態様によれば、本発明は、処置プロセスの大いなる安全性、有効性、均一性、および連続性を可能にする光ビームの動作パラメータの優れたリアルタイム制御を提供する。
【0013】
本発明の目的は、処置の全体的な品質を改善するため、フィードバック制御手段が付加された自由に動かすことができるハンドピースによって、中断されることのない手作業の組織処置のためのより正確かつ有効な技法を提供することにある。
【0014】
本発明の他の目的は、処置ビームの動作パラメータを、ハンドピースの位置および/または移動について検出された変化に応答して、実質的にリアルタイムまたは擬似リアルタイムで監視および自動制御し、そのような変化にもかかわらず処置の全体にわたって最適な処置条件を達成できるようにすることにある。
【0015】
本発明のさらなる目的は、手作業による組織の処置のための方法および装置であって、光ビームを管理された不連続パターンで複数の離散的な処置ゾーンへと、処置対象でない組織の巻き添えの損傷を最小にしつつ、かつそれら離散的な処置ゾーンの意図した形状および/または寸法にぶれまたは歪みを生じることなく同時に届けるため、ハンドピースの位置パラメータの変化に応答してハンドピースの出力光学系をリアルタイムで調節する方法および装置を提供することにある。
【0016】
本発明のさらに他の目的は、手作業による組織の処置のための方法および装置であって、個々の目標組織の特性およびハンドピースの速度にかかわらず、均一な光ビームのフルエンスおよびパターンをもたらすように構成された方法および装置を提供することにある。
【0017】
これらの目的および特徴、ならびに他の目的および特徴が、本明細書に含まれる本発明についての以下の説明から、明らかになるであろう。
【課題を解決するための手段】
【0018】
一態様において、本発明は、制御のもとで組織を処置するための装置に関する。この装置は、光ビームの光源を有している。光ビームは、あらかじめ決定された処置量(dosage)であらかじめ選択された組織の処置を行なうため、複数の制御可能な動作パラメータを有している。さらに装置は、光ビームを受け取って組織内の処置対象領域へと届けるように構成された可動のハンドピースを有している。ハンドピースの移動は、複数の可変の位置パラメータによって定められ、少なくとも1つの位置パラメータの変化が、あらかじめ選択された組織の処置の量を左右する。この装置は、ハンドピースの少なくとも1つの位置パラメータの変化をリアルタイムで検出および測定するための検出器を有している。この検出器が、少なくとも1つの位置パラメータの変化に応答して、新たな処置速度を実現すべく光ビームの動作パラメータをリアルタイムで自動的に制御するためのコントローラに接続されており、これによりあらかじめ選択された組織の処置をあらかじめ決定された処置量にて続けることができる。
【0019】
本発明の実施例は、以下の特徴の1つ以上を含むことができる。
【0020】
コントローラが、位置パラメータの変化を知らせる信号を受け取って、望ましい動作パラメータを位置パラメータの関数としてリアルタイムで計算するためのプロセッサを有することができる。あるいは、プロセッサが、動作パラメータを位置パラメータの関数として連続的に写像するため、位置パラメータと対応する動作パラメータとからなる整合したデータ・セットを保存していてもよい。
【0021】
さらにコントローラは、初期の動作パラメータを選択するため;位置パラメータの変化を知らせる信号を検出器から受け取り、処理し、プロセッサへと送るため;プロセッサから新たな一組の動作パラメータを受け取るため;および新たな一組の動作パラメータにもとづいてシステムの1つ以上のコンポーネントの動作モードをリアルタイムで変更して、新しい処置速度を達成するため;のインターフェイス・ユニットを含むことができる。
【0022】
検出器は、ハンドピースの2次元または3次元の運動の変化を高い精度で割り出すための画像処理素子を備えることができる。検出器は、加速度計、光検出器アレイ、容量式センサ・アレイ、または表面形状計であってよい。
【0023】
ハンドピースは、光ビームをハンドピースから目標領域へとあらかじめ選択された微視的パターンで届けることができるようにする屈折性または回折性の合焦素子を備えることができる。さらに、システムが、ビームを届けるための種々のデリバリ機構を備えることができ、そのようなデリバリ機構は、走査機構、ガルバノメータ、ピエゾ電気素子、可動ミラー、回折素子、ホログラフィック素子、MEMS、ナノテクノロジー、音響‐光学素子、および/または電気‐光学素子を含むことができる。
【0024】
コントローラは、医師がハンドピースの移動を所定の範囲内に保つことを助けるため、音響、振動、または視覚のフィードバックのための手段を含むことができる。
【0025】
他の態様において、本発明は、本発明のハンドピース装置を使用して組織を均一に処置するための方法に関する。ハンドピースが、あらかじめ決定された量でのあらかじめ選択された組織の処置のため、複数の動作パラメータを有する光処置ビームを放射する。このハンドピースが、さまざまな位置パラメータにて目標の組織領域へと処置を加えるため、作業者の手によって動かされるが、ハンドピースの少なくとも1つの位置パラメータが変化すると、組織の処置の量も変化する。少なくとも1つの可変の位置パラメータの変化が、検出器によってリアルタイムで、連続的または実質的に連続的に検出および測定される。望ましい一組の動作パラメータが、位置パラメータの変化にもとづいてプロセッサによって決定されて、制御用の情報がコントローラへと出力される。このプロセッサからの制御用の情報に応答して、あらたな処置速度が達成されるよう動作パラメータがリアルタイムで調節される。組織の処置が、新たな処置速度にて続けられ、これによって、あらかじめ決定された処置量が自動的に維持される。
【発明を実施するための最良の形態】
【0026】
詳細な説明および特許請求の範囲を参照し、図面との関連において検討することによって、本発明のさらに完全な理解がなされるであろう。図面においては、同様の参照番号は、すべての図を通じて同様の要素を指し示している。
【0027】
図1は、制御下での組織の処置のための本発明によるレーザ装置100を示している。組織としては、皮膚組織ならびに生体の全体にわたる他の組織を挙げることができる。本明細書において説明される種々の実施の形態および実施例は、皮膚の処置に言及しているが、他の組織も同様に処置できることを、当業者であれば理解できるであろう。
【0028】
図1に示した典型的な実施の形態によれば、装置100は、光ビームを発するための光放射器120を電気的接続部または光学的接続部115を介して駆動する電源110と;光ビームを伝達するための光ファイバー130と;光ビームを目標領域150に向けて放射するために、光ファイバー130に接続された光学素子160を備えている可動型のハンドピース140と;ハンドピース140の位置パラメータの変化を検出するための検出器170と;検出したハンドピースの位置パラメータの変化に応じて、目標領域150に向けて放射される光ビームの動作パラメータを制御するためのコントローラ200とを有している。光は、典型的には、光学的に透明な窓155を通過し、この窓155は、平坦であっても、湾曲していてもよい。接続部115は、単純に光ビームが通過する領域により構成することができる。コントローラ200は、新たな動作パラメータを計算するためのプロセッサ202、および装置100の動作パラメータを選択および調節するためのインターフェイス・ユニット210を有することができる。コントローラ200は、電源110、光放射器120、および光学素子160のうちの少なくとも1つのパラメータを調節することによって、動作パラメータを制御することができる。分かりやすくするために、これらの構成のうちのただ1つだけが説明される。
【0029】
装置100の光放射器120は、任意の光出力源であってよく、あるいは単に電源110によって生み出された光出力を放射するだけでもよい。光放射器120を、少なくとも部分的には、1つ以上の光出力源を使用して実現できる。いくつかの用途においては、光放射器120が、望ましくは複数の光出力源を、1次元アレイまたは2次元アレイなどのアレイに配置して備えることができる。本発明において利用される光出力源は、レーザであることが好ましい。本発明による適切なレーザとしては、希ガス・レーザ(例えば、アルゴン・レーザ、ヘリウム‐ネオン・レーザ、など)、ダイオード・レーザ、ファイバー・レーザ、および可変波長色素レーザが挙げられる。しかしながら、組織処置装置100における特定のレーザの選択が、特定の用途のために選択される皮膚の処置の種類によって決まることを理解しなければならない。本発明の光放射器120は、好ましくは約10Wであるが、約1W〜約100Wの間の光出力を生み出すように構成されている。
【0030】
光放射器120は、1つ以上の光ビームを発する。レーザによる組織の処置においては、各々の光ビームを、目標領域150において皮膚への所望の効果を生み出すように選択された光学的な動作パラメータの特定の組によって特徴付けることができる。光ビームの動作パラメータ(すなわち、光学的な動作パラメータ)としては、光のフルエンス、出力、脈動速度、デューティ・サイクル、光の強度、パルス開始のタイミング、パルスの継続時間、および波長を挙げることができる。
【0031】
光放射器120は、好ましくは、水によく吸収される波長の光を生成することができる。細胞水が、光のエネルギーを吸収して熱に変換する。190nm〜10600nmの範囲の波長、好ましくは700nm〜3000nmの範囲の波長、最も好ましくは約1550nmの波長など、190nmよりも長い波長が、装置100において使用されることが好ましい。望ましくは、光放射器120は、約1550nmの範囲での動作にあわせて設計されたエルビウム・ベースのファイバー・レーザである。光放射器120は、或る1つの波長または或る波長範囲をもたらすことが可能であってもよく、あるいは或る波長の範囲にわたって波長が可変であってもよい。1つ以上の光放射器120を電源110によって駆動し、皮膚の処置に使用される種々さまざまな波長または波長範囲を生み出すことができる。光放射器120を、レーザ光のパルスを毎秒0〜約50,000回のパルスの周波数、好ましくは毎秒0〜約1,000回のパルスの周波数で、選択的に生み出すように構成できる。好ましくは、光放射器120は、処置スポットあたりのパルス・エネルギーが約1mJ〜約1000mJであり、さらに好ましくは約10mJ〜約30mJの範囲にあるビームを放射し、各パルスは、約0.1ms〜約30ms、より好ましくは約1msの処置スポットあたりのパルス継続時間を有している。
【0032】
本発明の電源110および光放射器120は、例えば、目標領域150の皮層の非除去の凝固に使用することができる。典型的には、この目的においては、目標の組織領域150へと入射する光のフルエンスが、約10J/cm2〜約1000J/cm2の範囲の光のフルエンスなど、約5J/cm2を超えると、組織を凝固させるために適切である。一般的には、光のフルエンスは、波長および処置しようとする組織にあわせて調節される。皮膚へのさまざまな効果が望まれる場合には、電源110および光放射器120を、他の種類の組織の処置に適した光学的な動作パラメータを生み出す能力を備えるように、選択することができる。例えば、目標領域150の表皮層の除去が望まれる場合には、約2940nmの波長および10J/cm2を超える光のフルエンスを有する光ビームを放射する能力を有している電源110および光放射器120を、使用することができる。
【0033】
光ファイバー130は、光放射器120から発せられた光の伝達に適する任意の光学装置であってよい。ファイバー130は、目標領域150の種々の部位へと放射器120からの光を導くため、ハンドピース140の自由な操作ならびに繰り返しの曲げを可能にする材料で構成することができる。好ましくは、光ファイバー130は、ニューヨーク州CorningのCorning, Inc.が製造するSMF28というファイバーである。ファイバー130は、光ビームが光ファイバー130へと接続されるように光放射器120から発せられる光ビームに整列したビーム導入端132と、伝えられてきた光ビームをハンドピース140へと放射するためのビーム放出端134とを有することができる。放射器120からハンドピース140へと光ビームを伝えるために、2つ以上のファイバーを使用してもよい。好ましくは、放射器120から発せられた光をハンドピース140へと届けるために、2つのファイバー130が使用される。または代案として、光放射器120からハンドピース140の近位端へと光ビームを案内するために、例えばミラーまたは導波路などといった他の光デリバリ機構130を使用してもよい。
【0034】
図2を参照すると、ハンドピース140のハウジング142は、皮膚の処置を施す際に人間の手によって好都合に保持できるように構成された概略一体のユニットである。ハンドピース140のハウジング142の形状が、処置の際にハンドピースを巧みに操作するための幅広い範囲の動きを提供している。ハウジング142は、Kydexなどの軽量プラスチックで作ることができ、皮膚の組織の処置において使用される光学系および電子機器を保持することができる。ハウジング142は、ビーム放出端134の付近にてファイバー130に接続可能であり、光ビームが目標領域150に向かって伝播できるように、光ビームをハウジング142を通って案内して、ハウジングの遠位端に位置するハンドピース出力148から放射できる構造を含むことができる。最も効果的な処置のため、出力148から放射される光ビームを、出力148の表面に対して実質的に直角方向に導くことが好ましい。
【0035】
さらに、ハンドピース140は、ファイバー130に光学的に接続された光学素子160を備えている。光学素子160は、光のエネルギーを、ファイバー130から目標とする組織領域150へと導く。好ましい実施の形態においては、光学素子160が、ファイバー130から発せられた光ビームを目標領域150内の1つ以上の処置ゾーンへと合焦または視準することによって、光エネルギーを目標領域150へと導く。光学素子160は、ミラー、光学レンズ、または光学窓などといった1つ以上の光学素子を使用して実現できる。典型的には、非除去の処置においては、目標領域150の走査幅(swath width)が、約0.5cm〜2.0cmにあらかじめ選択される。
【0036】
光学素子160を、巨視的な処置パターンおよび処置ゾーンの密度を制御することができるように構成することができる。さらに詳しく後述するとおり、光学素子160を制御することによって、あらかじめ選択されたパターンおよび処置ゾーンの密度を、処置対象の全組織領域にわたって実質的に均一にすることができる。典型的な処置パターンとしては、約500ミクロン未満、好ましくは約250ミクロン未満、さらに好ましくは約100ミクロン未満である離散的な処置ゾーンのスポットの直径(すなわち、典型的には組織の表面におけるビームの1/e位置または半値全幅(FWHM)位置);所与の組織領域の上方をハンドピースが1回通過したときに1平方センチメートルあたりの処置ゾーンが約100〜2000個であるような処置密度;離散的な処置ゾーン間の隔たりが約75ミクロンよりも大きく、離散的な処置ゾーンの間に未処置および/または非損傷の組織を有する;および円柱の軸(または、楕円の主軸)が典型的には組織表面に直交している実質的に円形(あるいは楕円形)の処置ゾーン;が挙げられる。本発明の実施の形態は、例えば本件出願と同時に係属中である2004年7月9日付の「Method and Apparatus for Fractional Photo Therapy of Skin」という名称の特許出願に開示されているように、他の処置パターンおよび寸法を生み出すことも可能であり、この出願は、ここでの言及によって本明細書に取り入れられたものとする。
【0037】
さらに、ハンドピース140は、偏向器146を備えることができる。偏向器146は、ミラー、プリズム、格子、ホログラムなどの回折性の光学素子、など、処置のためにあらかじめ選択された波長の光ビームを偏向させるのに適した光学部品であってよい。偏向器146を、光学素子160に作用可能に接続し、光学素子160から放射される光ビームを変更することができる。好ましくは、偏向器146は、制御信号に応答してアクチュエータ145によって動かされるよう、ハウジング142内に可動に取り付けられる。アクチュエータ145が、偏向器146の位置を、所望の処置強度およびパターンに相当する位置へと調節すべく動作することができる。パターンが一定であるか否か、および連続的であるか不連続であるかにかかわらず、巨視的な処置が目標領域150の全体にわたって一様な様相でハンドピース140から届けられるよう、アクチュエータ145をコントローラ200によってリアルタイムに制御して、光ビームを変更することができる。いくつかの実施の形態においては、光学素子160およびアクチュエータ145が、デリバリ・システムの一部である。そのような実施の形態のデリバリ・パラメータとしては、例えば、処置ビームの寸法および形状、処置ビームがハンドピースから出る角度、開口数、焦点距離、走査速度、走査方向、処置パターン、などを挙げることができる。所与の処置について、離散的な処置ゾーン寸法および処置領域内の離散的な処置ゾーンのパターンは、典型的には、所与の実施の形態の光学システムおよびデリバリ・システムにおいて使用される光学的な動作パラメータおよびデリバリ・パラメータの組み合わせによって、部分的に規定される。
【0038】
図3を参照すると、最良の処置結果を達成するために、ハンドピース140は、好ましくは、目標領域150から、光ビームを所望のパターンに合焦させるべく計算された所定の距離に配置される。具体的には、ファイバー130から放射された光ビームが、ハンドピース140の光学系を通って伝達され、光学素子160によって合焦される。ハンドピースは、目標領域150から、ハンドピース出力148からの光ビームが目標領域150内の所望の深さに合焦される距離に配置される。さらに、ハンドピースは、好ましくは、ほぼ約0.5cm/s〜10cm/s、より好ましくは約2cm/s〜約6cm/sの実質的に一定または可変の速度で動かされ、光ビームが目標領域へと実質的に直角に伝播できる位置に保持される。
【0039】
処置の際に、例えば目標領域に対するハンドピースの距離、速度、および角度など、移動するハンドピースの位置パラメータが変化した場合、本発明において説明されるフィードバックによって、あらかじめ選択された処置量が維持される。例えば、非除去の処置について望まれる量を、約5J/cm2〜約2000J/cm2、好ましくは約150J/cm2〜約1000J/cm2のレベルに維持できる。位置パラメータが変化したときに、付与される処置の量、密度、およびパターンを、あらかじめ選択されたレベルに維持することができる。あらかじめ選択された処置パラメータの維持は、コントローラ200によって装置100の動作パラメータを調節することによって達成される。
【0040】
具体的には、目標領域150に対するハンドピース140の角度の変化が、目標領域へと向かう光ビームの伝播の角度を変化させるとともに、処置用の光ビームの光学的な進入の深さに影響して処置レベルを左右する可能性があるため、処置の量に大きな影響をもたらすと考えられる。この処置レベルの変化は、光ビームの光出力を可能であればハンドピースの出力窓155の温度の変化と組み合わせつつ調節することによって、実質的に補償することができる。例えば、ハンドピースの出力窓を、皮膚の温度を上回るように加熱することができる。次いで、出力窓が目標領域150に接触して位置する場合、出力窓によって皮膚が暖められ、したがって皮膚を所望の処置温度まで加熱するために必要な光エネルギーの量が少なくなる。
【0041】
他の例においては、目標領域150へと加えられる処置の量が、医師の手の速度の変化に反比例して変化する。処置の際、目標領域に対するビームの速度が大きくなると、届けられる処置の量は少なくなり、この逆も然りである。すなわち、手動によるハンドピースの移動の不正確さゆえ、処置量に望ましくない変化が生じ、処置の均一さを損なうとともに、処置の安全性および有効性に悪い影響を及ぼす。本発明のいくつかの実施の形態によれば、コントローラが、光ビームの光出力または他の光学的動作パラメータを調節し、さらには/あるいはデリバリ・システムのパラメータ(例えば、走査速度、ビームの形状および寸法、出口角度、など)を変化させることによって、この処置の均一性の変化を補償することができる。ハンドピースの速度の変化の補償は、動きによって生じる処置ゾーンのぶれの回避を含んでもよい。このような「ぶれ対策」については、後述の種々の実施の形態においてさらに詳しく説明する。
【0042】
図4A及び4Bを参照すると、グラフが、例えば目標領域に対する速度、距離、および位置といったハンドピースの位置パラメータと、処置速度にもたらされる変化との間の相関について、いくつかの例を示している。
【0043】
図4Aは、光放射器120が光をパルス状の光ビームとして発する場合について、装置100からもたらされる処置を示している。この装置においては、処置量が、処置の直線1mmあたりのパルスの数に比例している。一定の処置量を維持するためには、ハンドピースが目標領域の表面と平行に移動するとき、パルスの数が、目標領域150に対するハンドピースの速度に比例しなければならない。下方の破線300は、ハンドピースの速度が5〜80mm/sである場合について、直線1mmあたりのパルスが10個である場合の処置量を示している。5mm/s未満のハンドピース速度については、検出回路の雑音によって処置量に大きな割合の変化が引き起こされることがないようにする安全上の特徴として、直線1mmあたりのパルス数をゼロへと減らすことができる。上方の実線310は、ハンドピースの速度が5〜50mm/sである場合について、直線1mmあたりのパルスが20個である場合の処置量を示している。
【0044】
ハンドピース速度と処置量との間の関係が、図4Bに示されている。図4Bにおいては、下方の処置量応答曲線320が、図4Aの下方の破線300によって指定される処置パラメータによる処理からもたらされる処置量に対応している。同様に、図4Bにおいて、上方の処置量応答曲線330は、図4Aの上方の実線310によって指定される処置パラメータによる処理からもたらされる処置密度に対応している。
【0045】
図4Aおよび4Bを参照すると、これらのグラフは、直線1mmあたりに20個のパルスを施す場合においてハンドピースの速度が50mm/sを超えると、あらかじめ選択された処置量の維持を可能にするための充分な光出力を、光放射器120が発することができない旨を示している。ハンドピースの最大速度340を、それを超えるとあらかじめ選択された処置量パラメータの維持ができなくなる限界として定めることができる。図4Aおよび4Bを参照すると、50mm/sが、あらかじめ選択された処置量が直線1mmあたり0個〜20個のパルスの範囲にわたる場合の最大速度340である。
【0046】
図5Aは、光放射器120が光を連続波(CW)の光ビームとして発する場合について、装置100からもたらされる処置を示している。この装置においては、処置量が、処置の直線1mmあたりについて目標領域150に届けられる光ビームからの光エネルギーに比例している。一定の処置量を維持するためには、ハンドピースが目標領域の表面と平行に移動するとき、光放射器120から放射される光ビームのエネルギーが、目標領域150に対するハンドピースの速度に比例しなければならない。CW処置の速度の線350は、ハンドピースの速度が1〜80mm/sである場合について、直線1mmあたり1Jの処置量を示している。1mm/s未満のハンドピース速度については、検出回路の雑音によって処置量に大きな割合の変化が引き起こされることがないようにする安全上の特徴として、直線1mmあたりのスポットの数をゼロへと減らすことができる。
【0047】
ハンドピース速度と処置量との間の関係が、図5Bに示されている。図5Bにおいては、CW処置量応答線360が、図5AのCW処置の速度の線350によって指定される処置パラメータによる処理からもたらされる処置量に対応している。最大速度340は、図5Aおよび図5Bの範囲のハンドピース速度のグラフによって説明される最大のハンドピース速度以上であるため、図5Aのグラフには示されていない。
【0048】
このように、ハンドピースの速度が最大速度340よりも小さいならば、図4Aおよび5Aに示した両方の動作モードのもとで、組織処置量の均一性を、ハンドピースの位置パラメータの変化にもとづいて装置100の動作パラメータを適切に選択することによって、維持することが可能である。
【0049】
図1および図6を参照すると、ハンドピース140は、ハンドピース140の位置パラメータの変化を検出するための検出器170を好都合に備えている。検出器170は、目標領域150の画像を繰り返し取り込むための画像取得センサ180と、移動するハンドピース140の変化する位置パラメータをリアルタイムで分析するための画像処理装置190とを備えることができる。
【0050】
センサ180は、ハンドピース140の運動の定量的な測定を可能にする光学式のナビゲーション装置であってよい。光学式のナビゲーション技法の基本的な動作原理が、図6に示されている。発光ダイオード182が、ハンドピース140の下方の組織の表面を照射する。光が、収束レンズ184によって処置対象の表面へと収束され、目標領域150の微視的な皮膚組織の形状によって反射される。次いで、表面から散乱された光の収束ビームが収束レンズ186によって再び合焦され、位置センサ180上に画像が形成される。センサ180は、ハンドピース140が移動するときに、処置対象領域の各点の画像を高速で取得する。センサ180の画像取り込み速度は、連続する画像に重なり合いを可能にすべく充分に高い。センサ180からの連続する画像が、画像処理装置190へと送られる。目標領域と収束レンズ186との間のセンサ180の光の経路は、光学的に透明な窓155を備えることができる。
【0051】
画像処理装置190は、センサ180によって取り込まれた連続画像を分析するために光学式ナビゲーション・エンジンを使用するプログラマブルなデジタル・コンピュータであってよい。画像処理装置190を、画像間の共通の特徴を特定するために光学式ナビゲーション・エンジンの画像処理アルゴリズムを使用するように、設計することができる。2つの連続画像間の差が、連続する2つの時点における目標領域150に対するハンドピース140の位置、速度、および距離の変化に相当する。好ましくは、コントローラ200が、検出器170によって測定された1つ以上の位置パラメータの組にもとづいて皮膚の処置に適切な条件を決定するためのルールの組を保存している。このルールの組は、特定の種類の処置に関連付けられたファイルに保存でき、あるいは種々の患者が異なる処置条件を有することができるよう、特定の患者のために設計された処置に関連付けられたファイルに保存できる。ルールは、位置パラメータの測定における1つ以上の変化にもとづいて計算される可変の動作パラメータとして表現されたルールを含むことができる。さらにルールは、位置パラメータについての上限および下限、ならびに可変の動作パラメータが受容可能なしきい値を超え、あるいは下回った場合にもたらされる結果を含むことができる。そのような上限の一例は、図4Aおよび4Bに示した最大速度340である。異なる位置パラメータの複数の変化にもとづいて同じ動作パラメータを生み出すルールを、ブール論理演算子によって組み合わせ、ハンドピースの位置パラメータの多変数分析をもたらすことができる。
【0052】
コントローラ200からの考えられる結果には、「動作」モードおよび「停止」モードの起動が含まれ得る。「動作」モードにおいては、後で詳しく説明するように処置が続行され、装置100の動作パラメータが、ハンドピースの位置パラメータの変化を知らせる信号に応答して、リアルタイムで監視される。「停止」モードにおいては、コントローラ200が、処置の継続を非安全または非有効にするような処置条件の大きな変化の検出に応答して、装置100のすべての動作を速やかに停止させる。具体的には、処置量のレベルが下方のしきい値を超えているが、上方のしきい値を下回っている処置が、受容可能であると考えられる。処置量のレベルが上方のしきい値を超え、あるいは下方のしきい値を下回る処置が、装置100の停止を必要とするであろう。
【0053】
装置100において使用できる検出器170の具体例は、カリフォルニア州Palo AltoのAgilent Technologies, Inc.が製造する光学式ナビゲーション・センサであり、とくにはADNS2600という製品系列の光学式ナビゲーション・エンジンである。この光学式ナビゲーション・エンジン(すなわち、画像処理装置190)が、表面の連続画像を最大で毎秒2300回、光学的に取得して、ハンドピースの移動の方向および大きさを1インチあたり最大400カウント(400cpi)で、最大で毎秒12インチの速度(12ips)で数学的に割り出すことによって、ハンドピース位置の変化についての測定をもたらす。
【0054】
先の段落において説明したような光学式ナビゲーション・センサが検出器170として使用されるならば、いくつかの場合において、光学式ナビゲーション・センサにとってコントラストを強調する効果を有している物質を目標領域150に加えることによって、この検出器をよりロバスト(robust)にすることができる。そのようなコントラスト強調物質としては、例えば粒子、懸濁液、コロイド、乳液、または溶液を挙げることができる。コントラスト強調物質として使用できる粒子の一例は、ハンドピースによる処置に先立って、皮膚を塗装またはマークすることによって皮膚へと広げられるインク粒子である。いくつかの実施の形態においては、カーボン粒子または蛍光粒子などの粒子を使用することができる。さらなる例として、カリフォルニア州Palo AltoのReliant Technologies, Inc.が製造するOptiGuide Blueという染料を、コントラスト強調物質として使用することができる。この文脈において、コントラスト強調物質は、処置または診断の波長における吸収目標または発色団としてもっぱらまたは主として使用されているわけではなく、すでに処置された領域を示すための手段としてもっぱらまたは主として使用されているわけでもない。コントラスト強調物質は、それらが光を吸収または反射するがゆえに有効でありうる。皮膚は、可視光の波長についておおむね反射性であり、したがって照射の波長について大いに吸収性であるコントラスト強調物質が、容易に検出可能であろう。代案として、照射の波長において皮膚よりも反射性であるコントラスト強調物質を使用しても、検出性を向上させることができる。
【0055】
染料、インク、粒子、溶液、など、処置の波長を吸収しないが検出システムによる処置表面の視認のコントラストを強調するコントラスト強調物質を使用することで、高い信号対雑音比(SNR)、したがって、良好な表面品質(SQUAL)値を有する検出が可能になり、結果として処置の安全性および信頼性が改善される。種々の染料が、種々の視覚的効果を有している。例えば、シアン・ブルーを含んでいる染料(FD&C Blue #1)は、患者にとってかなり不自然に見える可能性があり、ときには特定の肌質において処置後の染みを生じて、処置後の清浄作業が望ましい程度よりも多くなる可能性がある。暗い色の皮膚においては、容易に検出されるメラニンのパターンが存在するため、暗い色の肌質の場合、赤色LED(610nm〜650nm)を使用すると明るい色の肌質よりも高いSQUAL値を有することに、注意すべきである。
【0056】
コントラスト強調物質は、部分的には、皮膚の色調および検出システムが使用する光の波長にもとづいて選択できる。すなわち、検出システムの赤色LEDの検出感度を、青色または黒色の染料、インク、または粒子を組織の表面に塗布することによって、向上させることができる。青色LEDが黄色の染料、インク、または粒子とともに使用されると、コントラストの向上がもたらされる。例えば、シリコン・マウス検出チップ(silicon mouse detection chip)と組み合わせられた橙‐赤色LEDが、青色の染料において良好に機能する。青色の染料は、上述のようにいくつかの問題を有する可能性がある。しかしながら、明るい青色の染料に減法混色の赤色および黄色の染料を加えることによって、視覚をあまり乱さず、処置後に取り除かれるときに、完全に取り除かれなくても患者が比較的通常の皮膚の色調を有しているように見受けられる茶色の染料がもたらされる。実際、染料を適切に設計することによって、染料の残留をなくすことができ、従来の染料混合物と同様の残留比が可能になり、処置後に紅斑と混ざり合う赤色の残留物が可能になり、あるいは処置によって生じる紅斑をカバーする役に立ち、処置後の化粧覆いとして機能する緑色の残留物がわずかに残るようにすることさえ可能になる。赤色および黄色を追加しても、ロボット・センサの性能を低下させることにはならない。何故ならば、コントラストは、主として青色染料の濃度、および皮膚の皮膚紋理学的ひだに蓄積するとき、または焦点検出および速度または位置検出の目的のために検出器によって識別される斑点パターンを生み出す塗布具によって意図的に塗布されるときの染料の厚さの変化によって決定されるためである。さらに、LEDにおける赤色および黄色の使用は、ロボットの視覚に減法混色の顔料を追加しない。換言すると、LEDの光の中で眺めたとき、皮膚の外観が、純粋な青色染料を有していようと、茶色の染料を有していようと、同じである。人間の眼の幅広いスペクトル感度は、青色と茶色とで、像をかなり異なって認識する。以下の例のような染料が使用されている。FD&C Blue #1、FD&C Red #40、FD&C Yellow #5、FD&C Yellow #6、D&C Red #22、およびD&C Red #33。
【0057】
染料を、さらに照準機構(targeting mechanism)として使用することも可能である。例えば、脚部の毛細血管拡張症またはクモ状静脈の処置において、Q先端または同様の塗布具を、目標および/または上層の角質層を染色することによって目標を着色するために、使用することができる。染料が、目標に一致するように注意深く塗布され、さらに必要に応じて調整されるため、後の処置が迅速かつ正確になる。さらに、血管の長さに沿った長い処置経路が、移動している血液を加熱して血液の冷却作用を除くうえで役に立つ。血管に直交する方向の処置も、使用可能である。接触端へと加えられる圧力によって、血管の病変または血管の処置をさらに補助することができる。暗い色の皮膚の場合には、1つがロボット・システムを起動させるための染料であって、もう1つが意図的にSQUAL値を小さくすることによってロボット・システムを停止させるための染料である2つの染料を、より効率的な処置のために設けることができる。意図する結果および処置、ならびに/あるいは使用される検出システムに応じて、任意の皮膚の種類または色について、複数の染料を使用することが可能である。
【0058】
コントラスト強調物質のさらなる例は、画像化の波長において吸収を行なうが、処置の波長に対しては透過性である蛍光染料である。漂白なしの定常状態の蛍光は、光センサ・アレイが近赤外の領域において最も高感度であるため、とくには近赤外(NIR)のスペクトルにおいて画像化システムのSNRを改善することができる。蛍光の追加は、高出力の照射源の必要性を少なくする。しかしながら、これは、色収差を最小限にするために、照射の波長および蛍光の波長の両者での画像化を取り入れた光学システムの設計を必要とする可能性がある。染料は、無毒でなくてはならず、典型的な処置温度(すなわち、110℃未満の温度)において漂白されてはならない。
【0059】
染料、インク溶液、または懸濁液などのコントラスト強調物質を使用する実施の形態においては、コントラスト強調物質の適用を、単純に物質を綿棒または他の適用具にて皮膚へと塗布することによって、達成することができる。物質は、典型的には、均一に広げられて乾燥されなければならないが、均一な広がりや乾燥待ちが、すべての場合において必要とされるわけではない。このプロセスは、天然の皮膚の不規則性およびひだを使用し、そのような不規則部分またはひだに物質が浸透または蓄積し、画像化のためのコントラストを強調する。典型的には、物質の厚い層が皮膚のひだ内に残る一方で、一般的には、皮膚の平坦部分にとどまる物質は少ない。物質の染みが、おそらくはランダムかつパッチ状に不規則に出現し、画像化対象の皮膚の天然の造作および観察されるコントラストを強調する。相対位置および速度の値を、この単純なプロセスにもとづいて抽出することができる。この技法は、皮膚へと規則的なパターンまたは図形を配置する必要がなく有用である。次いで、処置対象の組織に対するハンドピースまたは治療用の照射を発する要素の相対位置または速度の検出を、システムの1つ以上の様相を制御するために使用することができる。ハンドピースまたは照射を発する要素は、組織と接触してもよく、組織と接触しなくてもよい。光学システムおよび/または走査システムを、焦点深度、ビームの方向、ビームの形状および大きさ、走査の速度、多次元走査システムにおける走査の方向などのパラメータを変化させるべく、変化させることができる。さらに具体的には、処置ゾーンのぶれ防止を、これらのパラメータのうちの1つ以上をハンドピースの速度の変化に応答して変化させることによって、達成することができる。例えば、走査の速度ならびに/あるいはビームの形状および方向を、組織に対するハンドピースの移動を補償すべく変化させることができ、好ましくは、このようなパラメータを、ハンドピースの速度の変化に応答して変化させることができる。例えば、ハンドピースが組織の上方をよりすばやく移動するとき、システムの走査要素の走査速度を、移動に一致するように高めることができる。あるいは、ハンドピースが移動するときに、処置用のビームを所与の処置ゾーンに所望の時間にわたって保持するため、光学システムを変化させることができる。走査システムは、ガルバノメータ、ピエゾ電気素子、機械式の走査要素、MEMs、ナノテクノロジー、回転するミラーまたは光学素子、ホログラフィック素子、回折素子、音響光学素子、などを含むことができる。
【0060】
あるいは、カリフォルニア州SunnyvaleのVeridicom, Inc.が製造する精密シリコン・センサ「5thSenseUSB」シリーズなどの容量式センサ・アレイを、ハンドピースの位置パラメータの変化を検出するために使用することができる。容量式のセンサ・アレイにおいては、センサの表面が、検出回路を500dpiのピッチで備える90,000個のコンデンサ板からなるアレイを含んでいるシリコン・チップで構成されている。コンデンサの検出板が、チップへと押し付けられた組織の目標領域の尾根および谷の8ビット画像を生成する。この情報が、映像信号へと変換されて映像が生成され、次いでこの映像が分析され、2値形式へと変換されて固有の画像テンプレートとなる。テンプレートの変化が、目標領域150に対するハンドピース140の位置の変化に対応する。高速の光学式ナビゲーション検出器が、ハンドピースへの組み込みがより容易であり、ハンドピースの位置パラメータの測定のために好ましいと考えられる。
【0061】
装置100において使用できる検出器170の他の例は、例えば処置対象の組織に対するハンドピースの速度をリアルタイムで測定するための加速度計である。そのような加速度計の例は、マサチューセッツ州NorwoodのAnalog Devicesが製造するADXL202/ADXL210 iMEMS(登録商標) Accelerometersである。典型的には、加速度計からの信号は、装置の加速度を知らせる。次いで、そのような加速度信号を、例えばプロセッサまたはDSPによって積分機能を使用して処理し、装置の速度をもたらすことができる。本発明の他の実施の形態は、装置の相対位置または移動を割り出すために、表面形状測定計の形式の検出器を備えることができる。さらに、同様の機能(すなわち、移動、位置、速度、加速度、などの割り出し)を実行する他の実施の形態として、相対位置、速度、および/または加速度を割り出すためのMEMS、マイクロ機械‐光学デバイス、またはナノテクノロジー装置を挙げることができる。
【0062】
すでに述べたように、処置の全体において、装置100の動作パラメータを、処置の量が目標領域150の全体にわたって均一に維持されるように制御することが好ましい。好都合なことに、装置100は、処置の均一性、安全性、および有効性を向上させるため、ハンドピースの位置パラメータの変化を処置量の変化の源として特徴付け、コントローラ200によって実行されるアルゴリズムの適用の結果を、装置100の動作パラメータをリアルタイムで制御するために使用するように構成されている。
【0063】
図4Bおよび5Bに示したグラフから、ハンドピースの位置パラメータの変化に応答して装置100の動作パラメータを監視することによって、目標領域150の全体にわたり、処置期間の全体を通して、処置の量をあらかじめ選択された望ましいレベルにリアルタイムに維持できることが明らかである。具体的には、後述されるとおり、装置100を使用することによって、ハンドピースの動作パラメータ(例えば、光学的な動作パラメータおよびデリバリ・システムのパラメータ)のうちの任意の1つ以上の調節を、任意の1つ以上の位置パラメータの変化に応答して実行することができる。装置100は、人間の手の動きの不正確さをリアルタイムで補償することができ、したがって組織の処置を、より大いなる均一性、安全性、および有効性にて、あらかじめ選択されたレベルで目標の組織へと届けることができる。
【0064】
図1を参照すると、装置100は、好都合なことに、検出されたハンドピースの位置パラメータの変化に応答して、光ビームの動作パラメータの範囲をリアルタイムで調節するためのコントローラ200を備えている。コントローラ200は、正確なデジタル出力を受け取るために検出器170に接続された汎用のプログラマブルなデジタル・コンピュータであってもよい。コントローラ200を、処置を続けつつ、ハンドピースの位置パラメータの変化をリアルタイムで採取し、この位置パラメータ測定結果を表示モニタ(図示されていない)に表示し、この測定結果を保存し、処置の規準の論理を測定信号へと当てはめて動作パラメータに必要な調節を決定して、少なくとも1つの動作パラメータに対して調節を実行するように、プログラムすることができる。処置の論理について考えられる規準としては、目標領域150に対するハンドピースの位置または速度の変化、目標領域150に対するハンドピースの角度の変化、目標領域150からのハンドピースの距離の変化、またはこれらの組み合わせを挙げることができる。
【0065】
コントローラ200は、位置パラメータの変化を知らせる信号を検出器170から受け取って処理し、それらの信号を分析し、適切な動作パラメータの決定を要求する信号を送出し、さらに動作パラメータを表わす信号について調節を実行するためのインターフェイス・ユニット210を含むことができる。インターフェイス・ユニット210は、検出器170からの信号の正規化または増幅のためのアナログ処理回路(図示されていない)、およびアナログ信号をデジタル信号へと変換するためのアナログ‐デジタル・コンバータ(図示されていない)を備えることができる。インターフェイス・ユニット210を、組織の処置のための初期動作パラメータを選択し、新たな適切なパラメータを生成すべく装置の各部品をリアルタイムで制御可能に調節するため、装置100の各部品、すなわち電源110、光放射器120、およびアクチュエータ145へと動作可能に接続することができる。
【0066】
さらに、コントローラ200は、処置量の変化を知らせるインターフェイス・ユニット210からの信号に応答して、一組の所望の動作パラメータを決定するためのプロセッサ202を備えている。プロセッサ202は、マイクロプロセッサ、ASIC、DSP、コントローラ、または所望の動作パラメータの決定に適した他の処理手段として具現化することができる。インターフェイス210から信号を受け取ると、プロセッサ202は、新たな適切な一組の動作パラメータを決定する。光放射器120についての動作パラメータの例は、光出力、パルス繰返し速度、パルスのエネルギー、パルスのデューティ・サイクル、および波長である。他の動作パラメータの例は、ハンドピースの温度、ハンドピースの振動の強さ、ハンドピースの真空吸い込みの動作、アクチュエータ145の運動速度、およびアクチュエータ145の運動パターンである。プロセッサ202は、特定の動作パラメータを計算するための演算手段(図示されていない)を有してもよく、あるいは本発明のソフトウェアを使用して所望の処置のための最適な動作パラメータへと体系的に到達するために、神経ネットワークおよびファジー論理の技法にもとづいてもよい。あるいは、演算手段が、測定された位置パラメータまたは処置量に鑑みてあらかじめ選択された処置のための動作パラメータ値を生成するためのメモリ参照テーブルを有してもよい。メモリ参照テーブルは、検出器170からの信号値と対応する所望の動作パラメータの値とからなる整合したデータ・セットを提供する。したがって、コントローラ200に組み合わせられた本発明のソフトウェアによって、プロセッサ202が、装置100の動作パラメータをハンドピースの位置パラメータの関数としてリアルタイムで写像し、一組の所望の動作パラメータをインターフェイス・ユニット210へと出力することができる。
【0067】
コントローラ200によって決定された新規な動作パラメータが、インターフェイス・ユニット210を介して装置100の各コンポーネントへと通信される。具体的には、インターフェイス・ユニット210を、電源110へと接続することができる。インターフェイス・ユニット210が、検出器170から受け取った情報にもとづき、光放射器120の出力を増大または減少させるべく、電源110にリアルタイムで指令をすることができる。このようにして、新規な処置の動作パラメータを生成して、あらかじめ選択された処置量に相当する新たな処置速度をもたらすため、光放射器120によってもたらされる出力を、ハンドピースの位置パラメータの変化に応答してリアルタイムで調節することができる。
【0068】
動作においては、あらかじめ選択された所望の組織の処置のために、初期の動作パラメータが定められ、そのデータが、装置100の各コンポーネント動作モードを設定すべく、インターフェイス・ユニット210を介して入力される。この結果、電源110によって生成されるエネルギーおよび放射器120から発せられる光ビームの特性が、初期の動作パラメータによって特徴付けられる。この光ビームが、光ファイバー130を通ってハンドピース140へと伝えられ、あらかじめ選択された組織の処置をもたらすべく初期の動作位置に設定されている光学素子160によって、目標領域150へと合焦される。ハンドピース140が、医師の手によって目標領域150に沿って動かされる。
【0069】
処置の最中にハンドピース140の位置パラメータが変化するとき、検出器170が、1つ以上の位置パラメータの変化からもたらされる処置量の変化を検出する。本発明の実施の形態においては、ソフトウェア、ファームウェア、あるいは半導体素子を使用し、検出器170が、届けられる投与量の変化が、あらかじめ選択された処置量のしきい値を上回るのか、あるいは下回るのかを判断する。
【0070】
検出器170は、センサ180および画像処理装置190を使用することによって、繰り返しかつ正確な様相で変化を割り出す。センサ180が、目標領域150に対するハンドピース140の2次元または3次元の動きを、リアルタイムで追跡および分析する。センサ180によって生み出された目標組織の画像が、画像処理装置190によって記録および処理され、ハンドピースの位置パラメータの変化に起因する処置量の逸脱について表示される。
【0071】
逸脱が上側しきい値を超え、あるいは下側しきい値を下回る場合、装置100の動作を中断させるべく、コントローラ200から「停止」信号を送信でき、患者が安全でない処置にさらされることを防止できる。逸脱が、あらかじめ選択された受忍可能な処置量範囲の内側にある場合、信号があらかじめ選択された処置量からの実際の変化の値を表わし、処置を続けることができる・
【0072】
コントローラ200のインターフェイス・ユニット210が、検出器170から受け取った測定結果を保存し、変化した位置パラメータに対応する新たな一組の動作パラメータをリアルタイムで計算するよう、プロセッサ202を動作させる。本発明のソフトウェアを使用し、プロセッサ202が、動作パラメータを位置パラメータの関数として基本的に連続的に更新することによって、新たな動作パラメータをリアルタイムで計算する。この新しい一組の所望の動作パラメータを表わす信号が、インターフェイス・ユニット210へと返信される。
【0073】
インターフェイス・ユニット210は、装置100の実際の動作パラメータを、基本的に連続的に監視して測定する。処置の際に、インターフェイス・ユニット210は、測定された実際の動作パラメータの値を、プロセッサ202から受け取った計算による一組の動作パラメータとリアルタイムで比較する。1つ以上の動作パラメータについて測定値が計算値と異なっているとき、インターフェイス・ユニット210は、あらかじめ選択された組織の処置に従って電源110、放射器120、および光学素子160を制御するために、この情報を適用する。さらに具体的には、インターフェイス・ユニット210が、装置100の各コンポーネントの動作モードを変化させる信号を、装置100の各コンポーネントへと送信する。これにより、各コンポーネントが、新たな所望の値でのレーザ処置のための動作パラメータを生成できるようになる。この新たな動作パラメータの値によって、変化したハンドピース位置パラメータにおいて、あらかじめ選択された処置量に対応する新たな速度および/または構成でのレーザ処置が実行される。これにより、もたらされる処置量(すなわち、放射への暴露(単位はジュール/cm2))および微視的パターンの密度が不変に保たれるため、目標領域150を、あらかじめ選択されたレベルにきわめて近い処置レベルに曝すことができるようになる。
【0074】
例えば、光放射器120によって発せられる処置用の光ビームの波長または出力を、測定された値に従って調節することができる。光ビームの波長の範囲を複数、プロセッサ202のメモリに保存し、そこから選択を行なうことができる。あるいは、ハンドピースの位置パラメータの変化に起因する処置量の変化を表わしている検出器170からの信号に応答して、新たな波長を計算することができる。光ビームの波長のリアルタイムの実際の測定値を、処置の際にインターフェイス210によって、プロセッサ202によってもたらされる波長についての対応する保存値または計算値と比較することができる。これにより、処置用の光の波長を、測定値と保存されている範囲/計算された範囲との間の関係に従って光放射器120の連続出力またはサイクルをリアルタイムで調節することによって、再設定することができる。組織の処置が、ハンドピースの新たな位置または新たな速度に相応しい新たな波長によって、あらかじめ選択された処置量で続けられる。
【0075】
本発明によるレーザによる組織処置プロセス800の例が、図8に示されている。プロセス800は、大まかには、パラメータ設定ステップ810、移動ステップ820、測定ステップ830、評価ステップ840、決定ステップ850、調節ステップ860、および継続ステップ890を含んでいる。さらにプロセス800は、初期予選択ステップ870および警報ステップ880を適切に含んでもよい。
【0076】
パラメータ設定ステップ810は、大まかには、光学的な動作パラメータをインターフェイス・ユニット210のメモリに入力すること、および選択された動作パラメータを有する複数の光ビームを、放射器120から光ファイバー130およびハンドピース140を介して患者の処置対象組織(すなわち、目標領域150)に向かって放射すること、を含んでいる。処置用の動作パラメータとしては、レーザの出力、光ビームの強度、波長、放射の速度、脈動速度、パルスの継続時間、処置温度、などを挙げることができる。入力された動作パラメータが、好ましくは、目標領域150への光ビームの適用によって特定の患者についてあらかじめ選択された特定の皮膚処置がもたらされるように、選択される。
【0077】
移動ステップ820においては、ハンドピース140が医師の手によって目標領域150に沿って動かされる。ハンドピース140の動きは、例えば速度、目標領域からの距離、および目標領域150に対する位置、などといった位置パラメータによって規定される。例えば、処置が、好ましくは約10mm/sであるが一定の速度で、目標領域に対するハンドピース140の正確な距離および位置を備えて届けられることが好ましいなど、処置の均一性、安全性、および有効性といった理由のため、ハンドピース140の或る特定の位置パラメータは、一定のレベルに保たれることが好ましい。具体的には、ハンドピース140の出力148は、目標とする組織の領域150の表面から一定の距離に常に位置すべきであり、ハンドピースは、光ビームがほぼ直角に出口148から伝播できるように位置すべきである。手動操作の不正確さゆえに移動ステップ820においてハンドピースの位置パラメータが変化するとき、それらの変化が、処置の量および離散的な処置ゾーンの微視的なパターンに変化を生じさせる。
【0078】
測定ステップ830において、少なくとも1つの位置パラメータの変化が、処置を続けている間、リアルタイムで検出および測定される。変化が生じていると、それが検出器170によって検出および記録される。検出器170は、センサ180および画像処理装置190を使用して、再現可能かつ正確なやり方で位置パラメータの変化を割り出す。センサ180が、ハンドピース140の動きをリアルタイムで分析して、複数の画像を生成し、これらの画像が、画像処理装置190によって記録および処理される。画像処理装置190は、ハンドピースの位置パラメータの変化をリアルタイムの写像手順にて決定し、そこからコントローラ200が、ハンドピースの動作パラメータの変化を計算する。具体的には、測定ステップ830において、検出器170を使用することで、ハンドピースの動きを測定して、ハンドピースの動きが例えばハンドピースに許された最大速度など、各位置パラメータについての上限を超えないようにしてもよい。許されている最大速度を超えた場合、不適切な処置を防止すべく、コントローラ200によって装置100の動作を停止させることができる。あるいは、コントローラ200によって視覚または聴覚による警報を開始させ、不適切な施術を医師に警報することができる(ステップ880)。ステップ830において、目標領域150に沿った繰り返しの円形経路を巡る測定を可能にしつつ、ハンドピース140を医師の手によって適切に動かすことができる。本発明の典型的な実施の形態によれば、任意の数の測定を、目標領域150の任意の大きさの表面について行なうことができる。
【0079】
分析ステップ840においては、さらにコントローラ200が、検出されたハンドピースの位置パラメータの変化の大きさを分析し、処置の動作パラメータを調節する理由があるか否かを判断する。分析の結果、位置パラメータの変化が軽微であった場合には、そのような変化が処置量にもたらす影響が大きくないため、動作パラメータの調節は不要である。したがって、処置プロセスがあらかじめ選択された量にて続けられる(ステップ890)。
【0080】
少なくとも1つの位置パラメータの変化が、アルゴリズムのルールによって設定される最小値を上回っている場合、光ビームについて、おそらくは放射の速度、出力レベル、光ビームの強度、脈動速度、処置温度、などの新たな動作パラメータが、決定ステップ850にて決定される。
【0081】
具体的には、決定ステップ850において、プロセッサ202の演算手段は、アルゴリズムを使用して、検出器170からの信号にもとづいて、変化したハンドピース140の位置パラメータに対応する特定の動作パラメータをリアルタイムで計算する。動作パラメータの計算は、そのような新たな動作パラメータを使用することによって、あらかじめ選択された組織の処置を変わらぬままに続けることができるように、あるいはあらかじめ選択された組織の処置をハンドピース140の位置パラメータにもとづいて計算できる所望の量で続けることができるように、行なわれる。決定ステップ850は、検出器170によって生成された信号のインターフェイス・ユニット210による取得、処理、正規化、および変換を含んでもよい。
【0082】
他の実施例においては、決定ステップ850が、測定された位置パラメータまたは処置量の変化に鑑みて動作パラメータ値を生成するために、独自のメモリ参照テーブルの使用にもとづいてもよい。メモリ参照テーブルは、検出器170からの信号値と、対応する所望の動作パラメータの値とからなる整合したデータ・セットを提供している。または代案として、決定ステップ850が、あらかじめ選択された所望の処置のための最適な動作パラメータへと体系的に到達するために、神経ネットワークおよびファジー論理の技法の使用にもとづいてもよい。
【0083】
調節ステップ860においては、インターフェイス・ユニット210が、プロセッサ202から新たな動作パラメータを受け取り、本発明の独自のソフトウェアを適用することで、新たな動作パラメータを実行すべく電源110、光放射器120、およびアクチュエータ145といった装置100の少なくとも1つのコンポーネントの動作モードをリアルタイムで調節する。変化した位置パラメータに対して、装置100の各コンポーネントを新しい動作パラメータで動作させることによって、処置のレベルがあらかじめ選択されたレベルにきわめて近くなるように、すなわち処置の量(すなわち、放射への暴露(単位はJ/cm2))および微視的パターンの密度が不変に保たれ、あるいは所望の様相で変化するように、組織の処置を新たな速度でもたらすことができる。あらかじめ選択された1つ以上の処置プログラムを、新たな動作パラメータを達成するため、続く処置のために選択してもよい。装置100の任意の1つ以上のコンポーネントを、調節ステップ860において調節することができる。ステップ860を、あらかじめ選択された処置量が得られるまで、所望のとおり繰り返すことができる。
【0084】
継続ステップ890において、目標領域150の処置が、新しい動作パラメータにて続けられ、この新しい動作パラメータは、自動的に制御されて継続的に調節されることで、組織の処置が所望の処置量レベルに保たれる。
【0085】
上述のステップに加えて、プロセス800は、初期計算ステップ870を含むことができる。初期計算ステップ870においては、初期の動作パラメータが、特定の患者について計算される。換言すると、ステップ810において選択される動作パラメータを、この初期計算ステップにもとづいて計算することができ、動作パラメータが、個々の組織の特性および特定の患者についてあらかじめ選択された所望の処置結果の関数として計算される。
【0086】
(さらなる実施の形態の例)
ぶれ防止効果を補償するためのシステムおよび方法の例を示している本発明の種々のさらなる実施の形態について、次に説明する。すでに述べたように、処置量および/または処置パターンを変化させることなく種々の速度でハンドピースを動かすことができる点が、本発明の大きな利点である。人間の手によって動かされるハンドピースを備えるレーザ処置システムにおいて、ハンドピースの動きにもとづくフィードバック制御が備えられていない場合、典型的には、処置の量および/または処置パターンが影響を受けるであろう。これは、典型的には、処置パターンの散らばり、および処置ゾーンがハンドピースの移動の方向に沿って引き伸ばされることによる個々の離散的な処置ゾーンのぶれを含むであろう。
【0087】
ハンドピースの動きによるぶれの発生に対処するための2つのアプローチとして、ビーム角度の偏向およびビームの平行移動が挙げられる。図9および図10a〜cが、これらのアプローチを説明している。いくつかの実施の形態は、これらのアプローチの両方を備えることができる。
【0088】
図9は、組織916に対して移動908を行なうハンドピース(902、904、906)を、図式的な形式で示している。ハンドピースが移動するにつれ、処置ゾーン918が、処置ビーム910、912、914によって処置されている。ハンドピースおよび処置ビームは、ハンドピースがハンドピース位置#1(902)からハンドピース位置#3(906)まで移動する際の3つの代表的な位置に示されており、結果として処置ビームが、処置ビーム構成910から処置ビーム構成914へと変化している。このように、処置ビームが、ハンドピース位置#1(902)からハンドピース位置#3(906)までのハンドピースの移動の全体にわたって、処置ゾーン918に向けられたままである。処置ビームは、ハンドピース位置#1(902)からハンドピース位置#3(906)までの移動の間、連続波(CW)であっても、あるいはパルス状であってもよい。後でさらに詳しく説明するとおり、光学システムおよび/またはデリバリ・システムが、ビーム角度の偏向を生み出すように制御される。ハンドピースが静止状態に保たれて、組織916がハンドピースに対して動かされてもよいことが理解されるであろう。
【0089】
図10a〜10cは、組織1010に対して移動1004を行なうハンドピース1002を、図式的な形式で示している。ハンドピースが移動するにつれ、処置ゾーン1008が、処置ビーム1006、1012、1014によって処置されている。ハンドピースおよび処置ビームは、ハンドピースが時刻T0/位置#1から時刻T1/位置#2まで移動する際の3つの代表的な位置に示されており、結果として処置ビームが、処置ビーム構成1006から処置ビーム構成1012へと変化している。このように、処置ビームが、時刻T0/位置#1から時刻T1/位置#2までのハンドピースの移動の全体にわたって、処置ゾーン1008に向けられたままである。処置ビームは、時刻T0/位置#1から時刻T1/位置#2までの移動の間、連続波(CW)であっても、あるいはパルス状であってもよい。後でさらに詳しく説明するとおり、光学システムおよび/またはデリバリ・システムが、このビームの平行移動を生み出すように制御される。図9に示したビーム角度の偏向と異なり、ビームの平行移動のアプローチにおいては、処置ビームの角度は、ハンドピースの移動のあいだ実質的に変化しないままである。ビームの平行移動においては、典型的には、ハンドピース1002からのビーム出口位置が、ハンドピースの動きに対抗する方向に変化する。これにより、処置ビームが、時刻T0/位置#1から時刻T1/位置#2まで、第1の処置ゾーン1008の上方にとどまる。第1の処置ゾーン1008の処置が完了すると、次いで第2の処置ゾーン1016を、ハンドピースが時刻T2/位置#3にあるときの処置ビーム1014によって処置することができる。ハンドピースが静止状態に保たれて、組織1010がハンドピースに対して動かされてもよいことが、理解されるであろう。
【0090】
図11aは、ビーム角度偏向のアプローチの例として、2軸ガルバノメータ走査システムを使用する本発明の実施の形態を示している。典型的にはレーザ・ビームである光ビーム1106が、ミラー1102、1104の交差対へと案内され、ミラー1102、1104の交差対は、それらを傾けるためのガルバノメータ・アクチュエータを有している。次いで、ミラー1102、1104の交差対を出る光は、ミラー1108によって向け直され、結像レンズ対1110を通って組織1112へと向けられる。ミラー1108が、本発明の動作に必須ではなく、さらには結像レンズ対1110が、種々の構成をとることができることを、当業者であれば理解できるであろう。走査ミラー1102が、光ビームがシステムを通って離散的な処置ゾーン(例えば、1116、1118、1120、など)へと偏向されるよう、或る軸を中心として傾く。走査ミラー1102へと接続されたガルバノメータ(図11aには明示されていない)が、組織1112における処置ビーム1114の位置を制御するため、走査ミラー1102を回転させるべく動作する。組織1112の処置において処置ビーム1114が通過するハンドピース(図示されていない)を、図11aの紙面に直交する方向に動かすことができる。そのような動きの影響に対抗するため、ぶれ防止ミラー1104が、そこに接続されているガルバノメータ(図11aには明示されていない)によって、個々の処置ビーム1114がそれらのそれぞれの離散的な処置ゾーン(例えば、1116、1118、1120)に所望の処置時間および処置量にわたってとどまるように、傾けられる。例えば、ハンドピースが図11aの紙面を外れて閲覧者の方へと移動する場合、ぶれ防止ミラー1104が傾き、処置ビームがハンドピースの移動に対して閲覧者から離れるように紙面へと移動するよう、処置ビームの角度を変化させることによって、処置ビーム1114をそれぞれの処置ゾーンにとどまらせる。組織1112の立場からは、ハンドピースが移動する一方で、処置ビームが単純にそれぞれの離散的な処置ゾーンにとどまっているように見受けられ、次いで最初の組の離散的な処置ゾーンについて処置量が完了すると、処置ビーム1114が次の組の離散的な処置ゾーンへと飛び移るように見受けられる。
【0091】
種々の寸法およびシステム・パラメータが、例として図11aに示されている。これらの例のパラメータおよび寸法を、ここに説明されている方法および装置の基本的な考え方を変えることなく、所望の出力およびシステム構成に応じて変更できることを、当業者であれば理解できるであろう。さらに、単一ビームのシステムも、同様に構成することができ、その場合には、図11aの走査ミラー1102は不要であるかもしれない。さらには、例えばピエゾ電気、モータ、機械式システム、MEMSなどの他の傾斜または回転機構を、走査ミラーおよび/またはぶれ防止ミラーとの組み合わせにおいて使用することも可能である。ミラーを、回折素子およびホログラフィック素子で置き換えてもよい。代案として、走査機構が音響‐光学式、または電気‐光学式であってもよい。
【0092】
図11bは、図11aに関して上述した実施の形態について、結果の例を示している。図11bは、2組の離散的な処置ゾーン(1154、1156)を示し、異なる速度のハンドピースの移動についてのぶれ防止を説明している。比較的高速なハンドピースの動き1130について、9個の離散的な処置ゾーン(例えば、1134および1136)が、ハンドピースの動きの方向に直交する線に示されている(1154を参照)。3つの点からなる各組が、ハンドピースに関するただ1つの処置ゾーンを示している。例えば、ただ1つの処置ゾーン1134について、点1142、1144、および1146が重なり合い、ただ1つの離散的な処置ゾーン1134を形成している。ハンドピースが動き1130の方向に動くとき、処置ビームは点1142から出発し、点1142から点1146へとハンドピースの動きと反対の方向に移動する。それらが間隔およびタイミングについて、ハンドピースの動きを相殺するように制御されるとき、点1142、1144、および1146が、ハンドピースの運動ゆえに重なり合う。組織の立場から見れば、これらの点が実質的に正確に重なり合い、ただ1つの離散的な処置ゾーンが生み出されている。この例では、比較的高い速度を相殺するために、1200ミクロンのぶれ防止が使用されている。比較的低速なハンドピースの動き1132については、ハンドピースの動きを相殺するために、500ミクロンのぶれ防止1156で充分であるかもしれない。この例においては、1つの離散的な処置ゾーン1138が、より密な間隔の点1148、1150、1152を有している。上述の500ミクロンおよび1200ミクロンの例以外に、他のぶれ防止寸法も本発明に含まれ、それらがハンドピースの動きの速度によることを、当業者であれば理解できるであろう。いずれの場合も、所与の離散的な処置ゾーンまたはそのような処置ゾーンの組についてぶれ防止が達成されるために、連続的な処置ビームを使用することが可能である。あるいは、パルス状のビームを使用してもよく、その場合には、3つの別個のパルスを、離散的な処置ゾーンのための図11bに示した3つの点に文字通り対応させるべく、使用することができる。
【0093】
図12は、ビーム角度偏向を利用する本発明のさらなる実施の形態の例を示している。この例においては、レーザ源1202が光1204を発し、この光が光学素子1206を通過し、次いでミラー傾斜アクチュエータ1208へと接続されたミラー1210によって向け直される。次いで、向け直された光が、1つ以上の光学素子1212を通過し、組織1216の処置に使用される処置ビーム1214が形成される。この処置ビームが、典型的には、ハンドピース(図示されていない)から放射される。組織が、レーザおよび/またはハンドピースに対して移動1218を行なうとき、処置ビーム1214は、その移動に実質的に同期して移動1220を行なう。これにより、所望の処置および処置量の継続時間の最中にハンドピースが移動しても、当該継続時間の間、処置ビーム1214が実質的にただ1つの処置ゾーン上に保たれる。このぶれ防止補償は、処置ビーム1214の方向を変えるべくミラー1210を傾けることによって達成される。そのようなミラー1210の傾斜によって、ハンドピースおよび/または光学素子1212を出る処置ビームの角度を変えることができ、さらには/あるいはミラーの傾きによって、ハンドピースからの処置ビームの出口位置を変えることができる。傾斜アクチュエータ1208は、ガルバノメータ、ピエゾ電気素子、MEMS技術、モータ、などを含むことができる。
【0094】
本発明のさらなる実施の形態は、反対向きに回転する車輪を備え、それら車輪に光学素子を備えている。光学素子としては、透過性の素子(例えば、レンズ、くさび)、反射性の素子、屈折性の素子、またはホログラフィック素子を挙げることができる。そのような実施の形態の例が、本件出願と同時に係属中である「High Speed, High Efficiency Optical Pattern Generator Using Rotational Optical Elements」という名称の2003年12月31日付の米国特許出願第10/750,790号に記載されており、この出願は、その全体がここでの言及によって本明細書に取り入れられたものとする。反対向きに回転する車輪の上の光学素子の傾斜および/または回転の構成を変化させることによって、ぶれ防止を達成することができる。
【0095】
図13は、反対向きに回転するレンズの実施の形態について、典型的な結果を示している。図13は、8つの離散的な処置ゾーンからなる1本の線について、予想される結果および測定結果を示している。そのような離散的な処置ゾーンのそれぞれについて、ビーム位置の点が、図示の方向に移動するハンドピースに関して示されている。図13において、重なり合う3つの黒色のビーム位置の点からなっている組のそれぞれが、1つの離散的な処置ゾーンに対応している。ビーム位置の点は、ハンドピースの動きの方向と反対の順番に生成されている。
【0096】
図14aおよび14bは、本発明のさらなる実施の形態の例を示しており、ここでは、ビームの平行移動が利用されている。図14aは、複数の光ファイバー(例えば、1404および1406)を備える光ファイバー・アレイ1402の例を示している。1つ以上の照射ビームを、同時または順次に、光ファイバーを通して伝えることができる。図14bは、ファイバー・アレイ1402の側面図である。ファイバー・アレイ1402の遠位端(すなわち、処置対象の組織に最も近い端部)を、ハンドピース(図示されていない)へと接続することができ、さらには/あるいはハンドピースの内部に組み込むことができる。図14bに示した例では、ピエゾ電気素子(PZT)1412が、1つ以上の光ファイバー1404と接しており、さらには/あるいは1つ以上の光ファイバー1404に接続されている。さらにPZT1412は、ファイバー・アレイ1402の固定部1414および/またはハンドピースにも接する。PZT1412は、光ファイバー1404を典型的にはハンドピースの動き1408の方向と反対の方向にずらすように動作する。このようにして、ハンドピースおよび/またはファイバー・アレイ1402が動く際に、光ファイバー1404が、組織の離散的な処置ゾーン(図示されていない)の上方に保持されてぶれに対抗して所望の処置および量を提供する。PZT1412は、組織に対して光ファイバー1404を動かし、さらには/あるいは光ファイバー1404の角度を変化させるように、動作することができる。光ファイバー1404は、典型的には、ファイバー・アレイおよび/またはハンドピースに対する移動および/または曲げが可能であるよう、柔軟である。別個の光ファイバーを別個に動かすことができるよう、1つ以上のPZTを備えて、1つ以上の光ファイバーに接続することができる。
【0097】
本明細書においては、本発明を、添付の図面との関連において説明したが、本発明がここに示された特定の形式に限られないことを理解すべきである。例えば、本発明の方法および装置を、便宜上、人間の組織を微視的なパターンにて処置するために構成されたものとして説明したが、巨視的領域、開放パターン、病変の空間目標、などを処置するシステムの位置パラメータの変化にもとづいて動作パラメータをリアルタイムで調節するプロセスも、本発明の技術的範囲に含まれると考えられる。さらには、本発明は、皮膚の分野には限定されず、光またはレーザによる処置を使用する他の技法においても、本発明を好都合に使用することが可能である。本明細書に記載したレーザによる組織処置方法および装置の設計および構成配置において、他にもさまざまな変更、変形、および向上を、添付の特許請求の範囲に記載される本発明の技術的思想および技術的範囲から離れることなく、行なうことが可能である。
【図面の簡単な説明】
【0098】
【図1】本発明による装置の概略図であり、制御下での組織の処置のためのレーザ出力のフィードバック制御を示している。
【図2】検出器および光学素子を含んでいる本発明によるハンドピースの側面図である。
【図3】目標組織に対するハンドピースの位置パラメータの変化を概略的に示す簡単な断面図である。
【図4A】あらかじめ選択された処置量を維持するパルス状の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図4B】あらかじめ選択された処置量を維持するパルス状の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図5A】あらかじめ選択された処置量を維持する連続波(CW)の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図5B】あらかじめ選択された処置量を維持する連続波(CW)の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図6】検出モードにある図2に示したハンドピースの検出器を詳しく示す図である。
【図7】本発明によってリアルタイムで制御される連続パターンを有するあらかじめ選択された密度の離散的なゾーンで処置される領域のシミュレーションを示している。
【図8】あらかじめ選択された組織の処置の最中の少なくとも1つの位置パラメータ(ハンドピースの速度)の変化にもとづいて、ハンドピースの動作パラメータをリアルタイムで決定および調節する方法のフローチャートの例である。
【図9】ビーム角度の偏向を利用する実施の形態を示す図である。
【図10a】直接のビームの平行移動を使用する実施の形態を示す図である。
【図10b】直接のビームの平行移動を使用する実施の形態を示す図である。
【図10c】直接のビームの平行移動を使用する実施の形態を示す図である。
【図11a】ぶれ防止のために2軸ガルバノメータ走査システムを有する本発明の実施の形態の例を示す図である。
【図11b】ぶれ防止のために2軸ガルバノメータ走査システムを有する本発明の実施の形態の例を示す図である。
【図12】ミラー傾斜アクチュエータを有する本発明の実施の形態の例を示す図である。
【図13】逆回転する光学素子を利用する本発明の実施の形態について、処置ゾーンのシミュレーションを示す図である。
【図14a】ファイバー・アレイおよびピエゾ電気撓みによるぶれ防止アクチュエータを有する本発明の実施の形態の例を示す図である。
【図14b】ファイバー・アレイおよびピエゾ電気撓みによるぶれ防止アクチュエータを有する本発明の実施の形態の例を示す図である。
【符号の説明】
【0099】
100 処置装置、 110 電源、 115 接続部、 120 光放射器、 130 光ファイバー、 140 ハンドピース、 150 目標領域、 155 窓、 160 光学素子、 170 検出器、 200 コントローラ、 202 プロセッサ、 210 インターフェイス・ユニット
【発明の詳細な説明】
【0001】
(関連出願)
この出願は、2003年12月23日付の米国特許出願第10/745,761号「Method and Apparatus for Monitoring and Controlling Laser‐Induced Tissue Treatment」の部分継続出願であり、さらに2003年12月31日付の米国特許出願第10/750,790号「High Speed, High Efficiency Optical Pattern Generator Using Rotating Optical Element」の部分継続出願でもあり、さらには2004年8月26日付の米国特許仮出願第60/602,092号「Method and Apparatus for Monitoring and Controlling Laser‐Induced Tissue Treatment」について、米国特許法第119条(e)項のもとでの優先権を主張する。上記の出願はすべて、参考として本明細書中に援用される。
【技術分野】
【0002】
本発明は、皮膚組織の処置又は治療(treatment)のための方法および装置に関し、さらに詳しくは、光源と、ハンドピースと、ハンドピースの運動を測定するための手段との組み合わせを有して、組織の処置又は治療を制御するために利用される方法および装置に関する。
【背景技術】
【0003】
レーザおよび他の強力な光源が、皮膚組織の処置など、さまざまな種類の組織の処置に使用されている。光を利用する皮膚組織の処置においては、光ビームによって患者の皮膚表面が照射される。一般に、このような処置のために使用されるレーザは、例えば水など、皮膚内の自然の発色団のうちの1つによって吸収される波長で動作する。水が主たる発色団である場合には、細胞水および間隙水が光のエネルギーを吸収し、この光のエネルギーを熱エネルギーへと変換する。処置の際の組織における熱エネルギーの輸送は、光ビームの動作パラメータによってさまざまである伝導、対流、放射、代謝、蒸発、および相変化がかかわる複雑なプロセスである。このような手順においては、目標とする組織領域の下方または周囲の組織に損傷を与えないことが必須である。波長、出力、光の強度、パルスの継続時間、放射の速度、などの光ビームの光学的な動作パラメータが適切に選択されるならば、患者の皮膚の細胞水および間隙水が加熱され、温度の上昇が引き起こされて、所望の皮膚科学的効果が生み出される。対照的に、光学的な動作パラメータの選択が不適切である場合には、組織の処置不足または処置過剰が生じうる。したがって、光が適切なフルエンス(fluence)を備えて一様かつ制御可能なやり方で組織へと届けられるよう、処置において使用される光学的な動作パラメータを、精密に制御することが望まれる。レーザ・ビームの出力、強度、継続時間、などを賢明に制御するさまざまな装置が、提案されてきている。しかしながら、さらに詳しく後述するように、それらの装置の適用は、かなりの欠点を抱えている。
【0004】
皮膚組織の処置のための公知の装置は、ハンドピースと称されることもある手持ち式のデリバリ装置を備えている。ハンドピースは、それを使用して医師が組織へと処置を施す好都合な手段である。処置の際、光を発するハンドピースが、医師の手によって処置すべき組織に沿って動かされる。このような装置からの処置のレベルは、典型的には、光ビームの動作パラメータを手動で選択することによって前もって設定される。例えば出力レベル、エネルギー、パルスの頻度、温度、光の強度、および電流などといった動作パラメータが、処置プロセス全体の処置の程度を決定する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
いくつかの既存のハンドピースの欠点の1つは、安全であり、一様であり、かつ効果的な処置という制約の範囲内にとどまるために、ハンドピースを位置決めする際、および制御のもとで移動させる際に、厳格な正確さを必要とする点にある。理論的には、厳格な正確さは、処置を行なう医師の高度な熟練、注意、および器用さによって達成することができる。しかしながら、実際の施術においては、手作業によるハンドピースの適用および制御は、人間の手の運動の不正確さおよび無意識さ、ならびに/あるいは不均一な組織の表面ゆえに、容易に一様ではない処置という結果につながりうる。これにより、対象とする組織のいくらかの領域が処置不足になり、あるいは処置過剰になることがしばしばである。
【0006】
公知のハンドピースの典型的なアプローチは、皮膚組織のより大きな領域を処置するため、手作業にて皮膚の一領域から他の領域へとパッチワーク状の様相で動かされる巨視的なパルス状の処置ビームを生成することにある。このようなアプローチは、処置対象の皮膚表面に対する個々の処置の位置決めの不正確さに関連し、アーチファクト(artifacts)および鋭い境界が生み出されるという欠点を有している。
【0007】
公知のハンドピースの他の欠点は、上述のように、選択された処置のレベルを決定するレーザの動作パラメータが、典型的には、処置の全手順について前もって1度だけ設定される点にある。各患者の個々の組織の特性が、処置に先立って予備的な組織の評価にもとづいて因子として取り入れられ、それら所定の動作パラメータを使用して処置を進めることができる。
【0008】
例えば、いくつかの既存のハンドピース装置は、ハンドピースの移動の速度を医師へと知らせるフィードバックをもたらし、医師が処置の速度を調節できるようにしている。しかしながら、このハンドピース装置は、あらかじめ選択された動きの速度で処置を行なうことを、医師に要求している。この装置の欠点は、医師をただ1つの処置速度に拘束する点にある。例えば、頬などの大きくて平坦な領域においては、高速度での処置が望まれる。唇などの高度に入り組んだ領域については、より低い速度での処置が望ましい。医師をあらかじめ選択された動きの速度に拘束することで、顔など、広くて平坦な領域および高度に入り組んだ領域の両者を密に近接して備えている領域を処置するときに、医師の自由度が制限されてしまう。さらには、ハンドピースの速度が処置手順の最中に変化する場合、この装置は、移動の速度の変化を補償すべく自身の動作パラメータの自動調節を提供することがなく、したがって不均一な処置につながる。
【0009】
皮膚または美容外科の分野において使用されるロボット手段の適用は、人間の不正確さという限界の克服を可能にする。しかしながら、典型的な従来のロボット装置の欠点の1つは、処置において医師が提供する必要な指示および判断を欠く点にある。ロボットは正確であるが、典型的には、処置の際に複雑な選択を行ない、あるいは予測されていない状況に反応するほどには、充分に賢くはない。さらに、ロボットは、審美的な意味での医師の裁量の余地を奪い去ってしまう。
【0010】
典型的な従来のロボット装置のさらなる欠点は、処置の全体において、患者を完全に動かぬようにしておく必要がある点にある。あるいは、患者の動きを補償するために、高度な画像安定化システムを使用しなければならない。このようなロボット装置のさらに他の欠点は、それらがかさばり、移動のための余地があまり許されていない領域に関して、処置位置へと容易に移動させることができない点にある。むしろ、処置を行なうことができるようになるために、まず処置しようとする組織の表面を、特定の位置へと装置に対して移動させなければならない。
【0011】
本発明は、これら既存のレーザによるハンドピース装置およびロボットに関する問題を大幅に軽減する方法および装置を提供する。
【0012】
本発明は、光による組織の処置を制御するための優れた方法および装置であって、従来技術の欠点の多くを克服する方法および装置を提供する。現在知られている皮膚の組織の処置のための技法の欠点に対処する本発明のやり方を、本明細書において詳しく説明する。本発明の種々の態様によれば、本発明は、処置プロセスの大いなる安全性、有効性、均一性、および連続性を可能にする光ビームの動作パラメータの優れたリアルタイム制御を提供する。
【0013】
本発明の目的は、処置の全体的な品質を改善するため、フィードバック制御手段が付加された自由に動かすことができるハンドピースによって、中断されることのない手作業の組織処置のためのより正確かつ有効な技法を提供することにある。
【0014】
本発明の他の目的は、処置ビームの動作パラメータを、ハンドピースの位置および/または移動について検出された変化に応答して、実質的にリアルタイムまたは擬似リアルタイムで監視および自動制御し、そのような変化にもかかわらず処置の全体にわたって最適な処置条件を達成できるようにすることにある。
【0015】
本発明のさらなる目的は、手作業による組織の処置のための方法および装置であって、光ビームを管理された不連続パターンで複数の離散的な処置ゾーンへと、処置対象でない組織の巻き添えの損傷を最小にしつつ、かつそれら離散的な処置ゾーンの意図した形状および/または寸法にぶれまたは歪みを生じることなく同時に届けるため、ハンドピースの位置パラメータの変化に応答してハンドピースの出力光学系をリアルタイムで調節する方法および装置を提供することにある。
【0016】
本発明のさらに他の目的は、手作業による組織の処置のための方法および装置であって、個々の目標組織の特性およびハンドピースの速度にかかわらず、均一な光ビームのフルエンスおよびパターンをもたらすように構成された方法および装置を提供することにある。
【0017】
これらの目的および特徴、ならびに他の目的および特徴が、本明細書に含まれる本発明についての以下の説明から、明らかになるであろう。
【課題を解決するための手段】
【0018】
一態様において、本発明は、制御のもとで組織を処置するための装置に関する。この装置は、光ビームの光源を有している。光ビームは、あらかじめ決定された処置量(dosage)であらかじめ選択された組織の処置を行なうため、複数の制御可能な動作パラメータを有している。さらに装置は、光ビームを受け取って組織内の処置対象領域へと届けるように構成された可動のハンドピースを有している。ハンドピースの移動は、複数の可変の位置パラメータによって定められ、少なくとも1つの位置パラメータの変化が、あらかじめ選択された組織の処置の量を左右する。この装置は、ハンドピースの少なくとも1つの位置パラメータの変化をリアルタイムで検出および測定するための検出器を有している。この検出器が、少なくとも1つの位置パラメータの変化に応答して、新たな処置速度を実現すべく光ビームの動作パラメータをリアルタイムで自動的に制御するためのコントローラに接続されており、これによりあらかじめ選択された組織の処置をあらかじめ決定された処置量にて続けることができる。
【0019】
本発明の実施例は、以下の特徴の1つ以上を含むことができる。
【0020】
コントローラが、位置パラメータの変化を知らせる信号を受け取って、望ましい動作パラメータを位置パラメータの関数としてリアルタイムで計算するためのプロセッサを有することができる。あるいは、プロセッサが、動作パラメータを位置パラメータの関数として連続的に写像するため、位置パラメータと対応する動作パラメータとからなる整合したデータ・セットを保存していてもよい。
【0021】
さらにコントローラは、初期の動作パラメータを選択するため;位置パラメータの変化を知らせる信号を検出器から受け取り、処理し、プロセッサへと送るため;プロセッサから新たな一組の動作パラメータを受け取るため;および新たな一組の動作パラメータにもとづいてシステムの1つ以上のコンポーネントの動作モードをリアルタイムで変更して、新しい処置速度を達成するため;のインターフェイス・ユニットを含むことができる。
【0022】
検出器は、ハンドピースの2次元または3次元の運動の変化を高い精度で割り出すための画像処理素子を備えることができる。検出器は、加速度計、光検出器アレイ、容量式センサ・アレイ、または表面形状計であってよい。
【0023】
ハンドピースは、光ビームをハンドピースから目標領域へとあらかじめ選択された微視的パターンで届けることができるようにする屈折性または回折性の合焦素子を備えることができる。さらに、システムが、ビームを届けるための種々のデリバリ機構を備えることができ、そのようなデリバリ機構は、走査機構、ガルバノメータ、ピエゾ電気素子、可動ミラー、回折素子、ホログラフィック素子、MEMS、ナノテクノロジー、音響‐光学素子、および/または電気‐光学素子を含むことができる。
【0024】
コントローラは、医師がハンドピースの移動を所定の範囲内に保つことを助けるため、音響、振動、または視覚のフィードバックのための手段を含むことができる。
【0025】
他の態様において、本発明は、本発明のハンドピース装置を使用して組織を均一に処置するための方法に関する。ハンドピースが、あらかじめ決定された量でのあらかじめ選択された組織の処置のため、複数の動作パラメータを有する光処置ビームを放射する。このハンドピースが、さまざまな位置パラメータにて目標の組織領域へと処置を加えるため、作業者の手によって動かされるが、ハンドピースの少なくとも1つの位置パラメータが変化すると、組織の処置の量も変化する。少なくとも1つの可変の位置パラメータの変化が、検出器によってリアルタイムで、連続的または実質的に連続的に検出および測定される。望ましい一組の動作パラメータが、位置パラメータの変化にもとづいてプロセッサによって決定されて、制御用の情報がコントローラへと出力される。このプロセッサからの制御用の情報に応答して、あらたな処置速度が達成されるよう動作パラメータがリアルタイムで調節される。組織の処置が、新たな処置速度にて続けられ、これによって、あらかじめ決定された処置量が自動的に維持される。
【発明を実施するための最良の形態】
【0026】
詳細な説明および特許請求の範囲を参照し、図面との関連において検討することによって、本発明のさらに完全な理解がなされるであろう。図面においては、同様の参照番号は、すべての図を通じて同様の要素を指し示している。
【0027】
図1は、制御下での組織の処置のための本発明によるレーザ装置100を示している。組織としては、皮膚組織ならびに生体の全体にわたる他の組織を挙げることができる。本明細書において説明される種々の実施の形態および実施例は、皮膚の処置に言及しているが、他の組織も同様に処置できることを、当業者であれば理解できるであろう。
【0028】
図1に示した典型的な実施の形態によれば、装置100は、光ビームを発するための光放射器120を電気的接続部または光学的接続部115を介して駆動する電源110と;光ビームを伝達するための光ファイバー130と;光ビームを目標領域150に向けて放射するために、光ファイバー130に接続された光学素子160を備えている可動型のハンドピース140と;ハンドピース140の位置パラメータの変化を検出するための検出器170と;検出したハンドピースの位置パラメータの変化に応じて、目標領域150に向けて放射される光ビームの動作パラメータを制御するためのコントローラ200とを有している。光は、典型的には、光学的に透明な窓155を通過し、この窓155は、平坦であっても、湾曲していてもよい。接続部115は、単純に光ビームが通過する領域により構成することができる。コントローラ200は、新たな動作パラメータを計算するためのプロセッサ202、および装置100の動作パラメータを選択および調節するためのインターフェイス・ユニット210を有することができる。コントローラ200は、電源110、光放射器120、および光学素子160のうちの少なくとも1つのパラメータを調節することによって、動作パラメータを制御することができる。分かりやすくするために、これらの構成のうちのただ1つだけが説明される。
【0029】
装置100の光放射器120は、任意の光出力源であってよく、あるいは単に電源110によって生み出された光出力を放射するだけでもよい。光放射器120を、少なくとも部分的には、1つ以上の光出力源を使用して実現できる。いくつかの用途においては、光放射器120が、望ましくは複数の光出力源を、1次元アレイまたは2次元アレイなどのアレイに配置して備えることができる。本発明において利用される光出力源は、レーザであることが好ましい。本発明による適切なレーザとしては、希ガス・レーザ(例えば、アルゴン・レーザ、ヘリウム‐ネオン・レーザ、など)、ダイオード・レーザ、ファイバー・レーザ、および可変波長色素レーザが挙げられる。しかしながら、組織処置装置100における特定のレーザの選択が、特定の用途のために選択される皮膚の処置の種類によって決まることを理解しなければならない。本発明の光放射器120は、好ましくは約10Wであるが、約1W〜約100Wの間の光出力を生み出すように構成されている。
【0030】
光放射器120は、1つ以上の光ビームを発する。レーザによる組織の処置においては、各々の光ビームを、目標領域150において皮膚への所望の効果を生み出すように選択された光学的な動作パラメータの特定の組によって特徴付けることができる。光ビームの動作パラメータ(すなわち、光学的な動作パラメータ)としては、光のフルエンス、出力、脈動速度、デューティ・サイクル、光の強度、パルス開始のタイミング、パルスの継続時間、および波長を挙げることができる。
【0031】
光放射器120は、好ましくは、水によく吸収される波長の光を生成することができる。細胞水が、光のエネルギーを吸収して熱に変換する。190nm〜10600nmの範囲の波長、好ましくは700nm〜3000nmの範囲の波長、最も好ましくは約1550nmの波長など、190nmよりも長い波長が、装置100において使用されることが好ましい。望ましくは、光放射器120は、約1550nmの範囲での動作にあわせて設計されたエルビウム・ベースのファイバー・レーザである。光放射器120は、或る1つの波長または或る波長範囲をもたらすことが可能であってもよく、あるいは或る波長の範囲にわたって波長が可変であってもよい。1つ以上の光放射器120を電源110によって駆動し、皮膚の処置に使用される種々さまざまな波長または波長範囲を生み出すことができる。光放射器120を、レーザ光のパルスを毎秒0〜約50,000回のパルスの周波数、好ましくは毎秒0〜約1,000回のパルスの周波数で、選択的に生み出すように構成できる。好ましくは、光放射器120は、処置スポットあたりのパルス・エネルギーが約1mJ〜約1000mJであり、さらに好ましくは約10mJ〜約30mJの範囲にあるビームを放射し、各パルスは、約0.1ms〜約30ms、より好ましくは約1msの処置スポットあたりのパルス継続時間を有している。
【0032】
本発明の電源110および光放射器120は、例えば、目標領域150の皮層の非除去の凝固に使用することができる。典型的には、この目的においては、目標の組織領域150へと入射する光のフルエンスが、約10J/cm2〜約1000J/cm2の範囲の光のフルエンスなど、約5J/cm2を超えると、組織を凝固させるために適切である。一般的には、光のフルエンスは、波長および処置しようとする組織にあわせて調節される。皮膚へのさまざまな効果が望まれる場合には、電源110および光放射器120を、他の種類の組織の処置に適した光学的な動作パラメータを生み出す能力を備えるように、選択することができる。例えば、目標領域150の表皮層の除去が望まれる場合には、約2940nmの波長および10J/cm2を超える光のフルエンスを有する光ビームを放射する能力を有している電源110および光放射器120を、使用することができる。
【0033】
光ファイバー130は、光放射器120から発せられた光の伝達に適する任意の光学装置であってよい。ファイバー130は、目標領域150の種々の部位へと放射器120からの光を導くため、ハンドピース140の自由な操作ならびに繰り返しの曲げを可能にする材料で構成することができる。好ましくは、光ファイバー130は、ニューヨーク州CorningのCorning, Inc.が製造するSMF28というファイバーである。ファイバー130は、光ビームが光ファイバー130へと接続されるように光放射器120から発せられる光ビームに整列したビーム導入端132と、伝えられてきた光ビームをハンドピース140へと放射するためのビーム放出端134とを有することができる。放射器120からハンドピース140へと光ビームを伝えるために、2つ以上のファイバーを使用してもよい。好ましくは、放射器120から発せられた光をハンドピース140へと届けるために、2つのファイバー130が使用される。または代案として、光放射器120からハンドピース140の近位端へと光ビームを案内するために、例えばミラーまたは導波路などといった他の光デリバリ機構130を使用してもよい。
【0034】
図2を参照すると、ハンドピース140のハウジング142は、皮膚の処置を施す際に人間の手によって好都合に保持できるように構成された概略一体のユニットである。ハンドピース140のハウジング142の形状が、処置の際にハンドピースを巧みに操作するための幅広い範囲の動きを提供している。ハウジング142は、Kydexなどの軽量プラスチックで作ることができ、皮膚の組織の処置において使用される光学系および電子機器を保持することができる。ハウジング142は、ビーム放出端134の付近にてファイバー130に接続可能であり、光ビームが目標領域150に向かって伝播できるように、光ビームをハウジング142を通って案内して、ハウジングの遠位端に位置するハンドピース出力148から放射できる構造を含むことができる。最も効果的な処置のため、出力148から放射される光ビームを、出力148の表面に対して実質的に直角方向に導くことが好ましい。
【0035】
さらに、ハンドピース140は、ファイバー130に光学的に接続された光学素子160を備えている。光学素子160は、光のエネルギーを、ファイバー130から目標とする組織領域150へと導く。好ましい実施の形態においては、光学素子160が、ファイバー130から発せられた光ビームを目標領域150内の1つ以上の処置ゾーンへと合焦または視準することによって、光エネルギーを目標領域150へと導く。光学素子160は、ミラー、光学レンズ、または光学窓などといった1つ以上の光学素子を使用して実現できる。典型的には、非除去の処置においては、目標領域150の走査幅(swath width)が、約0.5cm〜2.0cmにあらかじめ選択される。
【0036】
光学素子160を、巨視的な処置パターンおよび処置ゾーンの密度を制御することができるように構成することができる。さらに詳しく後述するとおり、光学素子160を制御することによって、あらかじめ選択されたパターンおよび処置ゾーンの密度を、処置対象の全組織領域にわたって実質的に均一にすることができる。典型的な処置パターンとしては、約500ミクロン未満、好ましくは約250ミクロン未満、さらに好ましくは約100ミクロン未満である離散的な処置ゾーンのスポットの直径(すなわち、典型的には組織の表面におけるビームの1/e位置または半値全幅(FWHM)位置);所与の組織領域の上方をハンドピースが1回通過したときに1平方センチメートルあたりの処置ゾーンが約100〜2000個であるような処置密度;離散的な処置ゾーン間の隔たりが約75ミクロンよりも大きく、離散的な処置ゾーンの間に未処置および/または非損傷の組織を有する;および円柱の軸(または、楕円の主軸)が典型的には組織表面に直交している実質的に円形(あるいは楕円形)の処置ゾーン;が挙げられる。本発明の実施の形態は、例えば本件出願と同時に係属中である2004年7月9日付の「Method and Apparatus for Fractional Photo Therapy of Skin」という名称の特許出願に開示されているように、他の処置パターンおよび寸法を生み出すことも可能であり、この出願は、ここでの言及によって本明細書に取り入れられたものとする。
【0037】
さらに、ハンドピース140は、偏向器146を備えることができる。偏向器146は、ミラー、プリズム、格子、ホログラムなどの回折性の光学素子、など、処置のためにあらかじめ選択された波長の光ビームを偏向させるのに適した光学部品であってよい。偏向器146を、光学素子160に作用可能に接続し、光学素子160から放射される光ビームを変更することができる。好ましくは、偏向器146は、制御信号に応答してアクチュエータ145によって動かされるよう、ハウジング142内に可動に取り付けられる。アクチュエータ145が、偏向器146の位置を、所望の処置強度およびパターンに相当する位置へと調節すべく動作することができる。パターンが一定であるか否か、および連続的であるか不連続であるかにかかわらず、巨視的な処置が目標領域150の全体にわたって一様な様相でハンドピース140から届けられるよう、アクチュエータ145をコントローラ200によってリアルタイムに制御して、光ビームを変更することができる。いくつかの実施の形態においては、光学素子160およびアクチュエータ145が、デリバリ・システムの一部である。そのような実施の形態のデリバリ・パラメータとしては、例えば、処置ビームの寸法および形状、処置ビームがハンドピースから出る角度、開口数、焦点距離、走査速度、走査方向、処置パターン、などを挙げることができる。所与の処置について、離散的な処置ゾーン寸法および処置領域内の離散的な処置ゾーンのパターンは、典型的には、所与の実施の形態の光学システムおよびデリバリ・システムにおいて使用される光学的な動作パラメータおよびデリバリ・パラメータの組み合わせによって、部分的に規定される。
【0038】
図3を参照すると、最良の処置結果を達成するために、ハンドピース140は、好ましくは、目標領域150から、光ビームを所望のパターンに合焦させるべく計算された所定の距離に配置される。具体的には、ファイバー130から放射された光ビームが、ハンドピース140の光学系を通って伝達され、光学素子160によって合焦される。ハンドピースは、目標領域150から、ハンドピース出力148からの光ビームが目標領域150内の所望の深さに合焦される距離に配置される。さらに、ハンドピースは、好ましくは、ほぼ約0.5cm/s〜10cm/s、より好ましくは約2cm/s〜約6cm/sの実質的に一定または可変の速度で動かされ、光ビームが目標領域へと実質的に直角に伝播できる位置に保持される。
【0039】
処置の際に、例えば目標領域に対するハンドピースの距離、速度、および角度など、移動するハンドピースの位置パラメータが変化した場合、本発明において説明されるフィードバックによって、あらかじめ選択された処置量が維持される。例えば、非除去の処置について望まれる量を、約5J/cm2〜約2000J/cm2、好ましくは約150J/cm2〜約1000J/cm2のレベルに維持できる。位置パラメータが変化したときに、付与される処置の量、密度、およびパターンを、あらかじめ選択されたレベルに維持することができる。あらかじめ選択された処置パラメータの維持は、コントローラ200によって装置100の動作パラメータを調節することによって達成される。
【0040】
具体的には、目標領域150に対するハンドピース140の角度の変化が、目標領域へと向かう光ビームの伝播の角度を変化させるとともに、処置用の光ビームの光学的な進入の深さに影響して処置レベルを左右する可能性があるため、処置の量に大きな影響をもたらすと考えられる。この処置レベルの変化は、光ビームの光出力を可能であればハンドピースの出力窓155の温度の変化と組み合わせつつ調節することによって、実質的に補償することができる。例えば、ハンドピースの出力窓を、皮膚の温度を上回るように加熱することができる。次いで、出力窓が目標領域150に接触して位置する場合、出力窓によって皮膚が暖められ、したがって皮膚を所望の処置温度まで加熱するために必要な光エネルギーの量が少なくなる。
【0041】
他の例においては、目標領域150へと加えられる処置の量が、医師の手の速度の変化に反比例して変化する。処置の際、目標領域に対するビームの速度が大きくなると、届けられる処置の量は少なくなり、この逆も然りである。すなわち、手動によるハンドピースの移動の不正確さゆえ、処置量に望ましくない変化が生じ、処置の均一さを損なうとともに、処置の安全性および有効性に悪い影響を及ぼす。本発明のいくつかの実施の形態によれば、コントローラが、光ビームの光出力または他の光学的動作パラメータを調節し、さらには/あるいはデリバリ・システムのパラメータ(例えば、走査速度、ビームの形状および寸法、出口角度、など)を変化させることによって、この処置の均一性の変化を補償することができる。ハンドピースの速度の変化の補償は、動きによって生じる処置ゾーンのぶれの回避を含んでもよい。このような「ぶれ対策」については、後述の種々の実施の形態においてさらに詳しく説明する。
【0042】
図4A及び4Bを参照すると、グラフが、例えば目標領域に対する速度、距離、および位置といったハンドピースの位置パラメータと、処置速度にもたらされる変化との間の相関について、いくつかの例を示している。
【0043】
図4Aは、光放射器120が光をパルス状の光ビームとして発する場合について、装置100からもたらされる処置を示している。この装置においては、処置量が、処置の直線1mmあたりのパルスの数に比例している。一定の処置量を維持するためには、ハンドピースが目標領域の表面と平行に移動するとき、パルスの数が、目標領域150に対するハンドピースの速度に比例しなければならない。下方の破線300は、ハンドピースの速度が5〜80mm/sである場合について、直線1mmあたりのパルスが10個である場合の処置量を示している。5mm/s未満のハンドピース速度については、検出回路の雑音によって処置量に大きな割合の変化が引き起こされることがないようにする安全上の特徴として、直線1mmあたりのパルス数をゼロへと減らすことができる。上方の実線310は、ハンドピースの速度が5〜50mm/sである場合について、直線1mmあたりのパルスが20個である場合の処置量を示している。
【0044】
ハンドピース速度と処置量との間の関係が、図4Bに示されている。図4Bにおいては、下方の処置量応答曲線320が、図4Aの下方の破線300によって指定される処置パラメータによる処理からもたらされる処置量に対応している。同様に、図4Bにおいて、上方の処置量応答曲線330は、図4Aの上方の実線310によって指定される処置パラメータによる処理からもたらされる処置密度に対応している。
【0045】
図4Aおよび4Bを参照すると、これらのグラフは、直線1mmあたりに20個のパルスを施す場合においてハンドピースの速度が50mm/sを超えると、あらかじめ選択された処置量の維持を可能にするための充分な光出力を、光放射器120が発することができない旨を示している。ハンドピースの最大速度340を、それを超えるとあらかじめ選択された処置量パラメータの維持ができなくなる限界として定めることができる。図4Aおよび4Bを参照すると、50mm/sが、あらかじめ選択された処置量が直線1mmあたり0個〜20個のパルスの範囲にわたる場合の最大速度340である。
【0046】
図5Aは、光放射器120が光を連続波(CW)の光ビームとして発する場合について、装置100からもたらされる処置を示している。この装置においては、処置量が、処置の直線1mmあたりについて目標領域150に届けられる光ビームからの光エネルギーに比例している。一定の処置量を維持するためには、ハンドピースが目標領域の表面と平行に移動するとき、光放射器120から放射される光ビームのエネルギーが、目標領域150に対するハンドピースの速度に比例しなければならない。CW処置の速度の線350は、ハンドピースの速度が1〜80mm/sである場合について、直線1mmあたり1Jの処置量を示している。1mm/s未満のハンドピース速度については、検出回路の雑音によって処置量に大きな割合の変化が引き起こされることがないようにする安全上の特徴として、直線1mmあたりのスポットの数をゼロへと減らすことができる。
【0047】
ハンドピース速度と処置量との間の関係が、図5Bに示されている。図5Bにおいては、CW処置量応答線360が、図5AのCW処置の速度の線350によって指定される処置パラメータによる処理からもたらされる処置量に対応している。最大速度340は、図5Aおよび図5Bの範囲のハンドピース速度のグラフによって説明される最大のハンドピース速度以上であるため、図5Aのグラフには示されていない。
【0048】
このように、ハンドピースの速度が最大速度340よりも小さいならば、図4Aおよび5Aに示した両方の動作モードのもとで、組織処置量の均一性を、ハンドピースの位置パラメータの変化にもとづいて装置100の動作パラメータを適切に選択することによって、維持することが可能である。
【0049】
図1および図6を参照すると、ハンドピース140は、ハンドピース140の位置パラメータの変化を検出するための検出器170を好都合に備えている。検出器170は、目標領域150の画像を繰り返し取り込むための画像取得センサ180と、移動するハンドピース140の変化する位置パラメータをリアルタイムで分析するための画像処理装置190とを備えることができる。
【0050】
センサ180は、ハンドピース140の運動の定量的な測定を可能にする光学式のナビゲーション装置であってよい。光学式のナビゲーション技法の基本的な動作原理が、図6に示されている。発光ダイオード182が、ハンドピース140の下方の組織の表面を照射する。光が、収束レンズ184によって処置対象の表面へと収束され、目標領域150の微視的な皮膚組織の形状によって反射される。次いで、表面から散乱された光の収束ビームが収束レンズ186によって再び合焦され、位置センサ180上に画像が形成される。センサ180は、ハンドピース140が移動するときに、処置対象領域の各点の画像を高速で取得する。センサ180の画像取り込み速度は、連続する画像に重なり合いを可能にすべく充分に高い。センサ180からの連続する画像が、画像処理装置190へと送られる。目標領域と収束レンズ186との間のセンサ180の光の経路は、光学的に透明な窓155を備えることができる。
【0051】
画像処理装置190は、センサ180によって取り込まれた連続画像を分析するために光学式ナビゲーション・エンジンを使用するプログラマブルなデジタル・コンピュータであってよい。画像処理装置190を、画像間の共通の特徴を特定するために光学式ナビゲーション・エンジンの画像処理アルゴリズムを使用するように、設計することができる。2つの連続画像間の差が、連続する2つの時点における目標領域150に対するハンドピース140の位置、速度、および距離の変化に相当する。好ましくは、コントローラ200が、検出器170によって測定された1つ以上の位置パラメータの組にもとづいて皮膚の処置に適切な条件を決定するためのルールの組を保存している。このルールの組は、特定の種類の処置に関連付けられたファイルに保存でき、あるいは種々の患者が異なる処置条件を有することができるよう、特定の患者のために設計された処置に関連付けられたファイルに保存できる。ルールは、位置パラメータの測定における1つ以上の変化にもとづいて計算される可変の動作パラメータとして表現されたルールを含むことができる。さらにルールは、位置パラメータについての上限および下限、ならびに可変の動作パラメータが受容可能なしきい値を超え、あるいは下回った場合にもたらされる結果を含むことができる。そのような上限の一例は、図4Aおよび4Bに示した最大速度340である。異なる位置パラメータの複数の変化にもとづいて同じ動作パラメータを生み出すルールを、ブール論理演算子によって組み合わせ、ハンドピースの位置パラメータの多変数分析をもたらすことができる。
【0052】
コントローラ200からの考えられる結果には、「動作」モードおよび「停止」モードの起動が含まれ得る。「動作」モードにおいては、後で詳しく説明するように処置が続行され、装置100の動作パラメータが、ハンドピースの位置パラメータの変化を知らせる信号に応答して、リアルタイムで監視される。「停止」モードにおいては、コントローラ200が、処置の継続を非安全または非有効にするような処置条件の大きな変化の検出に応答して、装置100のすべての動作を速やかに停止させる。具体的には、処置量のレベルが下方のしきい値を超えているが、上方のしきい値を下回っている処置が、受容可能であると考えられる。処置量のレベルが上方のしきい値を超え、あるいは下方のしきい値を下回る処置が、装置100の停止を必要とするであろう。
【0053】
装置100において使用できる検出器170の具体例は、カリフォルニア州Palo AltoのAgilent Technologies, Inc.が製造する光学式ナビゲーション・センサであり、とくにはADNS2600という製品系列の光学式ナビゲーション・エンジンである。この光学式ナビゲーション・エンジン(すなわち、画像処理装置190)が、表面の連続画像を最大で毎秒2300回、光学的に取得して、ハンドピースの移動の方向および大きさを1インチあたり最大400カウント(400cpi)で、最大で毎秒12インチの速度(12ips)で数学的に割り出すことによって、ハンドピース位置の変化についての測定をもたらす。
【0054】
先の段落において説明したような光学式ナビゲーション・センサが検出器170として使用されるならば、いくつかの場合において、光学式ナビゲーション・センサにとってコントラストを強調する効果を有している物質を目標領域150に加えることによって、この検出器をよりロバスト(robust)にすることができる。そのようなコントラスト強調物質としては、例えば粒子、懸濁液、コロイド、乳液、または溶液を挙げることができる。コントラスト強調物質として使用できる粒子の一例は、ハンドピースによる処置に先立って、皮膚を塗装またはマークすることによって皮膚へと広げられるインク粒子である。いくつかの実施の形態においては、カーボン粒子または蛍光粒子などの粒子を使用することができる。さらなる例として、カリフォルニア州Palo AltoのReliant Technologies, Inc.が製造するOptiGuide Blueという染料を、コントラスト強調物質として使用することができる。この文脈において、コントラスト強調物質は、処置または診断の波長における吸収目標または発色団としてもっぱらまたは主として使用されているわけではなく、すでに処置された領域を示すための手段としてもっぱらまたは主として使用されているわけでもない。コントラスト強調物質は、それらが光を吸収または反射するがゆえに有効でありうる。皮膚は、可視光の波長についておおむね反射性であり、したがって照射の波長について大いに吸収性であるコントラスト強調物質が、容易に検出可能であろう。代案として、照射の波長において皮膚よりも反射性であるコントラスト強調物質を使用しても、検出性を向上させることができる。
【0055】
染料、インク、粒子、溶液、など、処置の波長を吸収しないが検出システムによる処置表面の視認のコントラストを強調するコントラスト強調物質を使用することで、高い信号対雑音比(SNR)、したがって、良好な表面品質(SQUAL)値を有する検出が可能になり、結果として処置の安全性および信頼性が改善される。種々の染料が、種々の視覚的効果を有している。例えば、シアン・ブルーを含んでいる染料(FD&C Blue #1)は、患者にとってかなり不自然に見える可能性があり、ときには特定の肌質において処置後の染みを生じて、処置後の清浄作業が望ましい程度よりも多くなる可能性がある。暗い色の皮膚においては、容易に検出されるメラニンのパターンが存在するため、暗い色の肌質の場合、赤色LED(610nm〜650nm)を使用すると明るい色の肌質よりも高いSQUAL値を有することに、注意すべきである。
【0056】
コントラスト強調物質は、部分的には、皮膚の色調および検出システムが使用する光の波長にもとづいて選択できる。すなわち、検出システムの赤色LEDの検出感度を、青色または黒色の染料、インク、または粒子を組織の表面に塗布することによって、向上させることができる。青色LEDが黄色の染料、インク、または粒子とともに使用されると、コントラストの向上がもたらされる。例えば、シリコン・マウス検出チップ(silicon mouse detection chip)と組み合わせられた橙‐赤色LEDが、青色の染料において良好に機能する。青色の染料は、上述のようにいくつかの問題を有する可能性がある。しかしながら、明るい青色の染料に減法混色の赤色および黄色の染料を加えることによって、視覚をあまり乱さず、処置後に取り除かれるときに、完全に取り除かれなくても患者が比較的通常の皮膚の色調を有しているように見受けられる茶色の染料がもたらされる。実際、染料を適切に設計することによって、染料の残留をなくすことができ、従来の染料混合物と同様の残留比が可能になり、処置後に紅斑と混ざり合う赤色の残留物が可能になり、あるいは処置によって生じる紅斑をカバーする役に立ち、処置後の化粧覆いとして機能する緑色の残留物がわずかに残るようにすることさえ可能になる。赤色および黄色を追加しても、ロボット・センサの性能を低下させることにはならない。何故ならば、コントラストは、主として青色染料の濃度、および皮膚の皮膚紋理学的ひだに蓄積するとき、または焦点検出および速度または位置検出の目的のために検出器によって識別される斑点パターンを生み出す塗布具によって意図的に塗布されるときの染料の厚さの変化によって決定されるためである。さらに、LEDにおける赤色および黄色の使用は、ロボットの視覚に減法混色の顔料を追加しない。換言すると、LEDの光の中で眺めたとき、皮膚の外観が、純粋な青色染料を有していようと、茶色の染料を有していようと、同じである。人間の眼の幅広いスペクトル感度は、青色と茶色とで、像をかなり異なって認識する。以下の例のような染料が使用されている。FD&C Blue #1、FD&C Red #40、FD&C Yellow #5、FD&C Yellow #6、D&C Red #22、およびD&C Red #33。
【0057】
染料を、さらに照準機構(targeting mechanism)として使用することも可能である。例えば、脚部の毛細血管拡張症またはクモ状静脈の処置において、Q先端または同様の塗布具を、目標および/または上層の角質層を染色することによって目標を着色するために、使用することができる。染料が、目標に一致するように注意深く塗布され、さらに必要に応じて調整されるため、後の処置が迅速かつ正確になる。さらに、血管の長さに沿った長い処置経路が、移動している血液を加熱して血液の冷却作用を除くうえで役に立つ。血管に直交する方向の処置も、使用可能である。接触端へと加えられる圧力によって、血管の病変または血管の処置をさらに補助することができる。暗い色の皮膚の場合には、1つがロボット・システムを起動させるための染料であって、もう1つが意図的にSQUAL値を小さくすることによってロボット・システムを停止させるための染料である2つの染料を、より効率的な処置のために設けることができる。意図する結果および処置、ならびに/あるいは使用される検出システムに応じて、任意の皮膚の種類または色について、複数の染料を使用することが可能である。
【0058】
コントラスト強調物質のさらなる例は、画像化の波長において吸収を行なうが、処置の波長に対しては透過性である蛍光染料である。漂白なしの定常状態の蛍光は、光センサ・アレイが近赤外の領域において最も高感度であるため、とくには近赤外(NIR)のスペクトルにおいて画像化システムのSNRを改善することができる。蛍光の追加は、高出力の照射源の必要性を少なくする。しかしながら、これは、色収差を最小限にするために、照射の波長および蛍光の波長の両者での画像化を取り入れた光学システムの設計を必要とする可能性がある。染料は、無毒でなくてはならず、典型的な処置温度(すなわち、110℃未満の温度)において漂白されてはならない。
【0059】
染料、インク溶液、または懸濁液などのコントラスト強調物質を使用する実施の形態においては、コントラスト強調物質の適用を、単純に物質を綿棒または他の適用具にて皮膚へと塗布することによって、達成することができる。物質は、典型的には、均一に広げられて乾燥されなければならないが、均一な広がりや乾燥待ちが、すべての場合において必要とされるわけではない。このプロセスは、天然の皮膚の不規則性およびひだを使用し、そのような不規則部分またはひだに物質が浸透または蓄積し、画像化のためのコントラストを強調する。典型的には、物質の厚い層が皮膚のひだ内に残る一方で、一般的には、皮膚の平坦部分にとどまる物質は少ない。物質の染みが、おそらくはランダムかつパッチ状に不規則に出現し、画像化対象の皮膚の天然の造作および観察されるコントラストを強調する。相対位置および速度の値を、この単純なプロセスにもとづいて抽出することができる。この技法は、皮膚へと規則的なパターンまたは図形を配置する必要がなく有用である。次いで、処置対象の組織に対するハンドピースまたは治療用の照射を発する要素の相対位置または速度の検出を、システムの1つ以上の様相を制御するために使用することができる。ハンドピースまたは照射を発する要素は、組織と接触してもよく、組織と接触しなくてもよい。光学システムおよび/または走査システムを、焦点深度、ビームの方向、ビームの形状および大きさ、走査の速度、多次元走査システムにおける走査の方向などのパラメータを変化させるべく、変化させることができる。さらに具体的には、処置ゾーンのぶれ防止を、これらのパラメータのうちの1つ以上をハンドピースの速度の変化に応答して変化させることによって、達成することができる。例えば、走査の速度ならびに/あるいはビームの形状および方向を、組織に対するハンドピースの移動を補償すべく変化させることができ、好ましくは、このようなパラメータを、ハンドピースの速度の変化に応答して変化させることができる。例えば、ハンドピースが組織の上方をよりすばやく移動するとき、システムの走査要素の走査速度を、移動に一致するように高めることができる。あるいは、ハンドピースが移動するときに、処置用のビームを所与の処置ゾーンに所望の時間にわたって保持するため、光学システムを変化させることができる。走査システムは、ガルバノメータ、ピエゾ電気素子、機械式の走査要素、MEMs、ナノテクノロジー、回転するミラーまたは光学素子、ホログラフィック素子、回折素子、音響光学素子、などを含むことができる。
【0060】
あるいは、カリフォルニア州SunnyvaleのVeridicom, Inc.が製造する精密シリコン・センサ「5thSenseUSB」シリーズなどの容量式センサ・アレイを、ハンドピースの位置パラメータの変化を検出するために使用することができる。容量式のセンサ・アレイにおいては、センサの表面が、検出回路を500dpiのピッチで備える90,000個のコンデンサ板からなるアレイを含んでいるシリコン・チップで構成されている。コンデンサの検出板が、チップへと押し付けられた組織の目標領域の尾根および谷の8ビット画像を生成する。この情報が、映像信号へと変換されて映像が生成され、次いでこの映像が分析され、2値形式へと変換されて固有の画像テンプレートとなる。テンプレートの変化が、目標領域150に対するハンドピース140の位置の変化に対応する。高速の光学式ナビゲーション検出器が、ハンドピースへの組み込みがより容易であり、ハンドピースの位置パラメータの測定のために好ましいと考えられる。
【0061】
装置100において使用できる検出器170の他の例は、例えば処置対象の組織に対するハンドピースの速度をリアルタイムで測定するための加速度計である。そのような加速度計の例は、マサチューセッツ州NorwoodのAnalog Devicesが製造するADXL202/ADXL210 iMEMS(登録商標) Accelerometersである。典型的には、加速度計からの信号は、装置の加速度を知らせる。次いで、そのような加速度信号を、例えばプロセッサまたはDSPによって積分機能を使用して処理し、装置の速度をもたらすことができる。本発明の他の実施の形態は、装置の相対位置または移動を割り出すために、表面形状測定計の形式の検出器を備えることができる。さらに、同様の機能(すなわち、移動、位置、速度、加速度、などの割り出し)を実行する他の実施の形態として、相対位置、速度、および/または加速度を割り出すためのMEMS、マイクロ機械‐光学デバイス、またはナノテクノロジー装置を挙げることができる。
【0062】
すでに述べたように、処置の全体において、装置100の動作パラメータを、処置の量が目標領域150の全体にわたって均一に維持されるように制御することが好ましい。好都合なことに、装置100は、処置の均一性、安全性、および有効性を向上させるため、ハンドピースの位置パラメータの変化を処置量の変化の源として特徴付け、コントローラ200によって実行されるアルゴリズムの適用の結果を、装置100の動作パラメータをリアルタイムで制御するために使用するように構成されている。
【0063】
図4Bおよび5Bに示したグラフから、ハンドピースの位置パラメータの変化に応答して装置100の動作パラメータを監視することによって、目標領域150の全体にわたり、処置期間の全体を通して、処置の量をあらかじめ選択された望ましいレベルにリアルタイムに維持できることが明らかである。具体的には、後述されるとおり、装置100を使用することによって、ハンドピースの動作パラメータ(例えば、光学的な動作パラメータおよびデリバリ・システムのパラメータ)のうちの任意の1つ以上の調節を、任意の1つ以上の位置パラメータの変化に応答して実行することができる。装置100は、人間の手の動きの不正確さをリアルタイムで補償することができ、したがって組織の処置を、より大いなる均一性、安全性、および有効性にて、あらかじめ選択されたレベルで目標の組織へと届けることができる。
【0064】
図1を参照すると、装置100は、好都合なことに、検出されたハンドピースの位置パラメータの変化に応答して、光ビームの動作パラメータの範囲をリアルタイムで調節するためのコントローラ200を備えている。コントローラ200は、正確なデジタル出力を受け取るために検出器170に接続された汎用のプログラマブルなデジタル・コンピュータであってもよい。コントローラ200を、処置を続けつつ、ハンドピースの位置パラメータの変化をリアルタイムで採取し、この位置パラメータ測定結果を表示モニタ(図示されていない)に表示し、この測定結果を保存し、処置の規準の論理を測定信号へと当てはめて動作パラメータに必要な調節を決定して、少なくとも1つの動作パラメータに対して調節を実行するように、プログラムすることができる。処置の論理について考えられる規準としては、目標領域150に対するハンドピースの位置または速度の変化、目標領域150に対するハンドピースの角度の変化、目標領域150からのハンドピースの距離の変化、またはこれらの組み合わせを挙げることができる。
【0065】
コントローラ200は、位置パラメータの変化を知らせる信号を検出器170から受け取って処理し、それらの信号を分析し、適切な動作パラメータの決定を要求する信号を送出し、さらに動作パラメータを表わす信号について調節を実行するためのインターフェイス・ユニット210を含むことができる。インターフェイス・ユニット210は、検出器170からの信号の正規化または増幅のためのアナログ処理回路(図示されていない)、およびアナログ信号をデジタル信号へと変換するためのアナログ‐デジタル・コンバータ(図示されていない)を備えることができる。インターフェイス・ユニット210を、組織の処置のための初期動作パラメータを選択し、新たな適切なパラメータを生成すべく装置の各部品をリアルタイムで制御可能に調節するため、装置100の各部品、すなわち電源110、光放射器120、およびアクチュエータ145へと動作可能に接続することができる。
【0066】
さらに、コントローラ200は、処置量の変化を知らせるインターフェイス・ユニット210からの信号に応答して、一組の所望の動作パラメータを決定するためのプロセッサ202を備えている。プロセッサ202は、マイクロプロセッサ、ASIC、DSP、コントローラ、または所望の動作パラメータの決定に適した他の処理手段として具現化することができる。インターフェイス210から信号を受け取ると、プロセッサ202は、新たな適切な一組の動作パラメータを決定する。光放射器120についての動作パラメータの例は、光出力、パルス繰返し速度、パルスのエネルギー、パルスのデューティ・サイクル、および波長である。他の動作パラメータの例は、ハンドピースの温度、ハンドピースの振動の強さ、ハンドピースの真空吸い込みの動作、アクチュエータ145の運動速度、およびアクチュエータ145の運動パターンである。プロセッサ202は、特定の動作パラメータを計算するための演算手段(図示されていない)を有してもよく、あるいは本発明のソフトウェアを使用して所望の処置のための最適な動作パラメータへと体系的に到達するために、神経ネットワークおよびファジー論理の技法にもとづいてもよい。あるいは、演算手段が、測定された位置パラメータまたは処置量に鑑みてあらかじめ選択された処置のための動作パラメータ値を生成するためのメモリ参照テーブルを有してもよい。メモリ参照テーブルは、検出器170からの信号値と対応する所望の動作パラメータの値とからなる整合したデータ・セットを提供する。したがって、コントローラ200に組み合わせられた本発明のソフトウェアによって、プロセッサ202が、装置100の動作パラメータをハンドピースの位置パラメータの関数としてリアルタイムで写像し、一組の所望の動作パラメータをインターフェイス・ユニット210へと出力することができる。
【0067】
コントローラ200によって決定された新規な動作パラメータが、インターフェイス・ユニット210を介して装置100の各コンポーネントへと通信される。具体的には、インターフェイス・ユニット210を、電源110へと接続することができる。インターフェイス・ユニット210が、検出器170から受け取った情報にもとづき、光放射器120の出力を増大または減少させるべく、電源110にリアルタイムで指令をすることができる。このようにして、新規な処置の動作パラメータを生成して、あらかじめ選択された処置量に相当する新たな処置速度をもたらすため、光放射器120によってもたらされる出力を、ハンドピースの位置パラメータの変化に応答してリアルタイムで調節することができる。
【0068】
動作においては、あらかじめ選択された所望の組織の処置のために、初期の動作パラメータが定められ、そのデータが、装置100の各コンポーネント動作モードを設定すべく、インターフェイス・ユニット210を介して入力される。この結果、電源110によって生成されるエネルギーおよび放射器120から発せられる光ビームの特性が、初期の動作パラメータによって特徴付けられる。この光ビームが、光ファイバー130を通ってハンドピース140へと伝えられ、あらかじめ選択された組織の処置をもたらすべく初期の動作位置に設定されている光学素子160によって、目標領域150へと合焦される。ハンドピース140が、医師の手によって目標領域150に沿って動かされる。
【0069】
処置の最中にハンドピース140の位置パラメータが変化するとき、検出器170が、1つ以上の位置パラメータの変化からもたらされる処置量の変化を検出する。本発明の実施の形態においては、ソフトウェア、ファームウェア、あるいは半導体素子を使用し、検出器170が、届けられる投与量の変化が、あらかじめ選択された処置量のしきい値を上回るのか、あるいは下回るのかを判断する。
【0070】
検出器170は、センサ180および画像処理装置190を使用することによって、繰り返しかつ正確な様相で変化を割り出す。センサ180が、目標領域150に対するハンドピース140の2次元または3次元の動きを、リアルタイムで追跡および分析する。センサ180によって生み出された目標組織の画像が、画像処理装置190によって記録および処理され、ハンドピースの位置パラメータの変化に起因する処置量の逸脱について表示される。
【0071】
逸脱が上側しきい値を超え、あるいは下側しきい値を下回る場合、装置100の動作を中断させるべく、コントローラ200から「停止」信号を送信でき、患者が安全でない処置にさらされることを防止できる。逸脱が、あらかじめ選択された受忍可能な処置量範囲の内側にある場合、信号があらかじめ選択された処置量からの実際の変化の値を表わし、処置を続けることができる・
【0072】
コントローラ200のインターフェイス・ユニット210が、検出器170から受け取った測定結果を保存し、変化した位置パラメータに対応する新たな一組の動作パラメータをリアルタイムで計算するよう、プロセッサ202を動作させる。本発明のソフトウェアを使用し、プロセッサ202が、動作パラメータを位置パラメータの関数として基本的に連続的に更新することによって、新たな動作パラメータをリアルタイムで計算する。この新しい一組の所望の動作パラメータを表わす信号が、インターフェイス・ユニット210へと返信される。
【0073】
インターフェイス・ユニット210は、装置100の実際の動作パラメータを、基本的に連続的に監視して測定する。処置の際に、インターフェイス・ユニット210は、測定された実際の動作パラメータの値を、プロセッサ202から受け取った計算による一組の動作パラメータとリアルタイムで比較する。1つ以上の動作パラメータについて測定値が計算値と異なっているとき、インターフェイス・ユニット210は、あらかじめ選択された組織の処置に従って電源110、放射器120、および光学素子160を制御するために、この情報を適用する。さらに具体的には、インターフェイス・ユニット210が、装置100の各コンポーネントの動作モードを変化させる信号を、装置100の各コンポーネントへと送信する。これにより、各コンポーネントが、新たな所望の値でのレーザ処置のための動作パラメータを生成できるようになる。この新たな動作パラメータの値によって、変化したハンドピース位置パラメータにおいて、あらかじめ選択された処置量に対応する新たな速度および/または構成でのレーザ処置が実行される。これにより、もたらされる処置量(すなわち、放射への暴露(単位はジュール/cm2))および微視的パターンの密度が不変に保たれるため、目標領域150を、あらかじめ選択されたレベルにきわめて近い処置レベルに曝すことができるようになる。
【0074】
例えば、光放射器120によって発せられる処置用の光ビームの波長または出力を、測定された値に従って調節することができる。光ビームの波長の範囲を複数、プロセッサ202のメモリに保存し、そこから選択を行なうことができる。あるいは、ハンドピースの位置パラメータの変化に起因する処置量の変化を表わしている検出器170からの信号に応答して、新たな波長を計算することができる。光ビームの波長のリアルタイムの実際の測定値を、処置の際にインターフェイス210によって、プロセッサ202によってもたらされる波長についての対応する保存値または計算値と比較することができる。これにより、処置用の光の波長を、測定値と保存されている範囲/計算された範囲との間の関係に従って光放射器120の連続出力またはサイクルをリアルタイムで調節することによって、再設定することができる。組織の処置が、ハンドピースの新たな位置または新たな速度に相応しい新たな波長によって、あらかじめ選択された処置量で続けられる。
【0075】
本発明によるレーザによる組織処置プロセス800の例が、図8に示されている。プロセス800は、大まかには、パラメータ設定ステップ810、移動ステップ820、測定ステップ830、評価ステップ840、決定ステップ850、調節ステップ860、および継続ステップ890を含んでいる。さらにプロセス800は、初期予選択ステップ870および警報ステップ880を適切に含んでもよい。
【0076】
パラメータ設定ステップ810は、大まかには、光学的な動作パラメータをインターフェイス・ユニット210のメモリに入力すること、および選択された動作パラメータを有する複数の光ビームを、放射器120から光ファイバー130およびハンドピース140を介して患者の処置対象組織(すなわち、目標領域150)に向かって放射すること、を含んでいる。処置用の動作パラメータとしては、レーザの出力、光ビームの強度、波長、放射の速度、脈動速度、パルスの継続時間、処置温度、などを挙げることができる。入力された動作パラメータが、好ましくは、目標領域150への光ビームの適用によって特定の患者についてあらかじめ選択された特定の皮膚処置がもたらされるように、選択される。
【0077】
移動ステップ820においては、ハンドピース140が医師の手によって目標領域150に沿って動かされる。ハンドピース140の動きは、例えば速度、目標領域からの距離、および目標領域150に対する位置、などといった位置パラメータによって規定される。例えば、処置が、好ましくは約10mm/sであるが一定の速度で、目標領域に対するハンドピース140の正確な距離および位置を備えて届けられることが好ましいなど、処置の均一性、安全性、および有効性といった理由のため、ハンドピース140の或る特定の位置パラメータは、一定のレベルに保たれることが好ましい。具体的には、ハンドピース140の出力148は、目標とする組織の領域150の表面から一定の距離に常に位置すべきであり、ハンドピースは、光ビームがほぼ直角に出口148から伝播できるように位置すべきである。手動操作の不正確さゆえに移動ステップ820においてハンドピースの位置パラメータが変化するとき、それらの変化が、処置の量および離散的な処置ゾーンの微視的なパターンに変化を生じさせる。
【0078】
測定ステップ830において、少なくとも1つの位置パラメータの変化が、処置を続けている間、リアルタイムで検出および測定される。変化が生じていると、それが検出器170によって検出および記録される。検出器170は、センサ180および画像処理装置190を使用して、再現可能かつ正確なやり方で位置パラメータの変化を割り出す。センサ180が、ハンドピース140の動きをリアルタイムで分析して、複数の画像を生成し、これらの画像が、画像処理装置190によって記録および処理される。画像処理装置190は、ハンドピースの位置パラメータの変化をリアルタイムの写像手順にて決定し、そこからコントローラ200が、ハンドピースの動作パラメータの変化を計算する。具体的には、測定ステップ830において、検出器170を使用することで、ハンドピースの動きを測定して、ハンドピースの動きが例えばハンドピースに許された最大速度など、各位置パラメータについての上限を超えないようにしてもよい。許されている最大速度を超えた場合、不適切な処置を防止すべく、コントローラ200によって装置100の動作を停止させることができる。あるいは、コントローラ200によって視覚または聴覚による警報を開始させ、不適切な施術を医師に警報することができる(ステップ880)。ステップ830において、目標領域150に沿った繰り返しの円形経路を巡る測定を可能にしつつ、ハンドピース140を医師の手によって適切に動かすことができる。本発明の典型的な実施の形態によれば、任意の数の測定を、目標領域150の任意の大きさの表面について行なうことができる。
【0079】
分析ステップ840においては、さらにコントローラ200が、検出されたハンドピースの位置パラメータの変化の大きさを分析し、処置の動作パラメータを調節する理由があるか否かを判断する。分析の結果、位置パラメータの変化が軽微であった場合には、そのような変化が処置量にもたらす影響が大きくないため、動作パラメータの調節は不要である。したがって、処置プロセスがあらかじめ選択された量にて続けられる(ステップ890)。
【0080】
少なくとも1つの位置パラメータの変化が、アルゴリズムのルールによって設定される最小値を上回っている場合、光ビームについて、おそらくは放射の速度、出力レベル、光ビームの強度、脈動速度、処置温度、などの新たな動作パラメータが、決定ステップ850にて決定される。
【0081】
具体的には、決定ステップ850において、プロセッサ202の演算手段は、アルゴリズムを使用して、検出器170からの信号にもとづいて、変化したハンドピース140の位置パラメータに対応する特定の動作パラメータをリアルタイムで計算する。動作パラメータの計算は、そのような新たな動作パラメータを使用することによって、あらかじめ選択された組織の処置を変わらぬままに続けることができるように、あるいはあらかじめ選択された組織の処置をハンドピース140の位置パラメータにもとづいて計算できる所望の量で続けることができるように、行なわれる。決定ステップ850は、検出器170によって生成された信号のインターフェイス・ユニット210による取得、処理、正規化、および変換を含んでもよい。
【0082】
他の実施例においては、決定ステップ850が、測定された位置パラメータまたは処置量の変化に鑑みて動作パラメータ値を生成するために、独自のメモリ参照テーブルの使用にもとづいてもよい。メモリ参照テーブルは、検出器170からの信号値と、対応する所望の動作パラメータの値とからなる整合したデータ・セットを提供している。または代案として、決定ステップ850が、あらかじめ選択された所望の処置のための最適な動作パラメータへと体系的に到達するために、神経ネットワークおよびファジー論理の技法の使用にもとづいてもよい。
【0083】
調節ステップ860においては、インターフェイス・ユニット210が、プロセッサ202から新たな動作パラメータを受け取り、本発明の独自のソフトウェアを適用することで、新たな動作パラメータを実行すべく電源110、光放射器120、およびアクチュエータ145といった装置100の少なくとも1つのコンポーネントの動作モードをリアルタイムで調節する。変化した位置パラメータに対して、装置100の各コンポーネントを新しい動作パラメータで動作させることによって、処置のレベルがあらかじめ選択されたレベルにきわめて近くなるように、すなわち処置の量(すなわち、放射への暴露(単位はJ/cm2))および微視的パターンの密度が不変に保たれ、あるいは所望の様相で変化するように、組織の処置を新たな速度でもたらすことができる。あらかじめ選択された1つ以上の処置プログラムを、新たな動作パラメータを達成するため、続く処置のために選択してもよい。装置100の任意の1つ以上のコンポーネントを、調節ステップ860において調節することができる。ステップ860を、あらかじめ選択された処置量が得られるまで、所望のとおり繰り返すことができる。
【0084】
継続ステップ890において、目標領域150の処置が、新しい動作パラメータにて続けられ、この新しい動作パラメータは、自動的に制御されて継続的に調節されることで、組織の処置が所望の処置量レベルに保たれる。
【0085】
上述のステップに加えて、プロセス800は、初期計算ステップ870を含むことができる。初期計算ステップ870においては、初期の動作パラメータが、特定の患者について計算される。換言すると、ステップ810において選択される動作パラメータを、この初期計算ステップにもとづいて計算することができ、動作パラメータが、個々の組織の特性および特定の患者についてあらかじめ選択された所望の処置結果の関数として計算される。
【0086】
(さらなる実施の形態の例)
ぶれ防止効果を補償するためのシステムおよび方法の例を示している本発明の種々のさらなる実施の形態について、次に説明する。すでに述べたように、処置量および/または処置パターンを変化させることなく種々の速度でハンドピースを動かすことができる点が、本発明の大きな利点である。人間の手によって動かされるハンドピースを備えるレーザ処置システムにおいて、ハンドピースの動きにもとづくフィードバック制御が備えられていない場合、典型的には、処置の量および/または処置パターンが影響を受けるであろう。これは、典型的には、処置パターンの散らばり、および処置ゾーンがハンドピースの移動の方向に沿って引き伸ばされることによる個々の離散的な処置ゾーンのぶれを含むであろう。
【0087】
ハンドピースの動きによるぶれの発生に対処するための2つのアプローチとして、ビーム角度の偏向およびビームの平行移動が挙げられる。図9および図10a〜cが、これらのアプローチを説明している。いくつかの実施の形態は、これらのアプローチの両方を備えることができる。
【0088】
図9は、組織916に対して移動908を行なうハンドピース(902、904、906)を、図式的な形式で示している。ハンドピースが移動するにつれ、処置ゾーン918が、処置ビーム910、912、914によって処置されている。ハンドピースおよび処置ビームは、ハンドピースがハンドピース位置#1(902)からハンドピース位置#3(906)まで移動する際の3つの代表的な位置に示されており、結果として処置ビームが、処置ビーム構成910から処置ビーム構成914へと変化している。このように、処置ビームが、ハンドピース位置#1(902)からハンドピース位置#3(906)までのハンドピースの移動の全体にわたって、処置ゾーン918に向けられたままである。処置ビームは、ハンドピース位置#1(902)からハンドピース位置#3(906)までの移動の間、連続波(CW)であっても、あるいはパルス状であってもよい。後でさらに詳しく説明するとおり、光学システムおよび/またはデリバリ・システムが、ビーム角度の偏向を生み出すように制御される。ハンドピースが静止状態に保たれて、組織916がハンドピースに対して動かされてもよいことが理解されるであろう。
【0089】
図10a〜10cは、組織1010に対して移動1004を行なうハンドピース1002を、図式的な形式で示している。ハンドピースが移動するにつれ、処置ゾーン1008が、処置ビーム1006、1012、1014によって処置されている。ハンドピースおよび処置ビームは、ハンドピースが時刻T0/位置#1から時刻T1/位置#2まで移動する際の3つの代表的な位置に示されており、結果として処置ビームが、処置ビーム構成1006から処置ビーム構成1012へと変化している。このように、処置ビームが、時刻T0/位置#1から時刻T1/位置#2までのハンドピースの移動の全体にわたって、処置ゾーン1008に向けられたままである。処置ビームは、時刻T0/位置#1から時刻T1/位置#2までの移動の間、連続波(CW)であっても、あるいはパルス状であってもよい。後でさらに詳しく説明するとおり、光学システムおよび/またはデリバリ・システムが、このビームの平行移動を生み出すように制御される。図9に示したビーム角度の偏向と異なり、ビームの平行移動のアプローチにおいては、処置ビームの角度は、ハンドピースの移動のあいだ実質的に変化しないままである。ビームの平行移動においては、典型的には、ハンドピース1002からのビーム出口位置が、ハンドピースの動きに対抗する方向に変化する。これにより、処置ビームが、時刻T0/位置#1から時刻T1/位置#2まで、第1の処置ゾーン1008の上方にとどまる。第1の処置ゾーン1008の処置が完了すると、次いで第2の処置ゾーン1016を、ハンドピースが時刻T2/位置#3にあるときの処置ビーム1014によって処置することができる。ハンドピースが静止状態に保たれて、組織1010がハンドピースに対して動かされてもよいことが、理解されるであろう。
【0090】
図11aは、ビーム角度偏向のアプローチの例として、2軸ガルバノメータ走査システムを使用する本発明の実施の形態を示している。典型的にはレーザ・ビームである光ビーム1106が、ミラー1102、1104の交差対へと案内され、ミラー1102、1104の交差対は、それらを傾けるためのガルバノメータ・アクチュエータを有している。次いで、ミラー1102、1104の交差対を出る光は、ミラー1108によって向け直され、結像レンズ対1110を通って組織1112へと向けられる。ミラー1108が、本発明の動作に必須ではなく、さらには結像レンズ対1110が、種々の構成をとることができることを、当業者であれば理解できるであろう。走査ミラー1102が、光ビームがシステムを通って離散的な処置ゾーン(例えば、1116、1118、1120、など)へと偏向されるよう、或る軸を中心として傾く。走査ミラー1102へと接続されたガルバノメータ(図11aには明示されていない)が、組織1112における処置ビーム1114の位置を制御するため、走査ミラー1102を回転させるべく動作する。組織1112の処置において処置ビーム1114が通過するハンドピース(図示されていない)を、図11aの紙面に直交する方向に動かすことができる。そのような動きの影響に対抗するため、ぶれ防止ミラー1104が、そこに接続されているガルバノメータ(図11aには明示されていない)によって、個々の処置ビーム1114がそれらのそれぞれの離散的な処置ゾーン(例えば、1116、1118、1120)に所望の処置時間および処置量にわたってとどまるように、傾けられる。例えば、ハンドピースが図11aの紙面を外れて閲覧者の方へと移動する場合、ぶれ防止ミラー1104が傾き、処置ビームがハンドピースの移動に対して閲覧者から離れるように紙面へと移動するよう、処置ビームの角度を変化させることによって、処置ビーム1114をそれぞれの処置ゾーンにとどまらせる。組織1112の立場からは、ハンドピースが移動する一方で、処置ビームが単純にそれぞれの離散的な処置ゾーンにとどまっているように見受けられ、次いで最初の組の離散的な処置ゾーンについて処置量が完了すると、処置ビーム1114が次の組の離散的な処置ゾーンへと飛び移るように見受けられる。
【0091】
種々の寸法およびシステム・パラメータが、例として図11aに示されている。これらの例のパラメータおよび寸法を、ここに説明されている方法および装置の基本的な考え方を変えることなく、所望の出力およびシステム構成に応じて変更できることを、当業者であれば理解できるであろう。さらに、単一ビームのシステムも、同様に構成することができ、その場合には、図11aの走査ミラー1102は不要であるかもしれない。さらには、例えばピエゾ電気、モータ、機械式システム、MEMSなどの他の傾斜または回転機構を、走査ミラーおよび/またはぶれ防止ミラーとの組み合わせにおいて使用することも可能である。ミラーを、回折素子およびホログラフィック素子で置き換えてもよい。代案として、走査機構が音響‐光学式、または電気‐光学式であってもよい。
【0092】
図11bは、図11aに関して上述した実施の形態について、結果の例を示している。図11bは、2組の離散的な処置ゾーン(1154、1156)を示し、異なる速度のハンドピースの移動についてのぶれ防止を説明している。比較的高速なハンドピースの動き1130について、9個の離散的な処置ゾーン(例えば、1134および1136)が、ハンドピースの動きの方向に直交する線に示されている(1154を参照)。3つの点からなる各組が、ハンドピースに関するただ1つの処置ゾーンを示している。例えば、ただ1つの処置ゾーン1134について、点1142、1144、および1146が重なり合い、ただ1つの離散的な処置ゾーン1134を形成している。ハンドピースが動き1130の方向に動くとき、処置ビームは点1142から出発し、点1142から点1146へとハンドピースの動きと反対の方向に移動する。それらが間隔およびタイミングについて、ハンドピースの動きを相殺するように制御されるとき、点1142、1144、および1146が、ハンドピースの運動ゆえに重なり合う。組織の立場から見れば、これらの点が実質的に正確に重なり合い、ただ1つの離散的な処置ゾーンが生み出されている。この例では、比較的高い速度を相殺するために、1200ミクロンのぶれ防止が使用されている。比較的低速なハンドピースの動き1132については、ハンドピースの動きを相殺するために、500ミクロンのぶれ防止1156で充分であるかもしれない。この例においては、1つの離散的な処置ゾーン1138が、より密な間隔の点1148、1150、1152を有している。上述の500ミクロンおよび1200ミクロンの例以外に、他のぶれ防止寸法も本発明に含まれ、それらがハンドピースの動きの速度によることを、当業者であれば理解できるであろう。いずれの場合も、所与の離散的な処置ゾーンまたはそのような処置ゾーンの組についてぶれ防止が達成されるために、連続的な処置ビームを使用することが可能である。あるいは、パルス状のビームを使用してもよく、その場合には、3つの別個のパルスを、離散的な処置ゾーンのための図11bに示した3つの点に文字通り対応させるべく、使用することができる。
【0093】
図12は、ビーム角度偏向を利用する本発明のさらなる実施の形態の例を示している。この例においては、レーザ源1202が光1204を発し、この光が光学素子1206を通過し、次いでミラー傾斜アクチュエータ1208へと接続されたミラー1210によって向け直される。次いで、向け直された光が、1つ以上の光学素子1212を通過し、組織1216の処置に使用される処置ビーム1214が形成される。この処置ビームが、典型的には、ハンドピース(図示されていない)から放射される。組織が、レーザおよび/またはハンドピースに対して移動1218を行なうとき、処置ビーム1214は、その移動に実質的に同期して移動1220を行なう。これにより、所望の処置および処置量の継続時間の最中にハンドピースが移動しても、当該継続時間の間、処置ビーム1214が実質的にただ1つの処置ゾーン上に保たれる。このぶれ防止補償は、処置ビーム1214の方向を変えるべくミラー1210を傾けることによって達成される。そのようなミラー1210の傾斜によって、ハンドピースおよび/または光学素子1212を出る処置ビームの角度を変えることができ、さらには/あるいはミラーの傾きによって、ハンドピースからの処置ビームの出口位置を変えることができる。傾斜アクチュエータ1208は、ガルバノメータ、ピエゾ電気素子、MEMS技術、モータ、などを含むことができる。
【0094】
本発明のさらなる実施の形態は、反対向きに回転する車輪を備え、それら車輪に光学素子を備えている。光学素子としては、透過性の素子(例えば、レンズ、くさび)、反射性の素子、屈折性の素子、またはホログラフィック素子を挙げることができる。そのような実施の形態の例が、本件出願と同時に係属中である「High Speed, High Efficiency Optical Pattern Generator Using Rotational Optical Elements」という名称の2003年12月31日付の米国特許出願第10/750,790号に記載されており、この出願は、その全体がここでの言及によって本明細書に取り入れられたものとする。反対向きに回転する車輪の上の光学素子の傾斜および/または回転の構成を変化させることによって、ぶれ防止を達成することができる。
【0095】
図13は、反対向きに回転するレンズの実施の形態について、典型的な結果を示している。図13は、8つの離散的な処置ゾーンからなる1本の線について、予想される結果および測定結果を示している。そのような離散的な処置ゾーンのそれぞれについて、ビーム位置の点が、図示の方向に移動するハンドピースに関して示されている。図13において、重なり合う3つの黒色のビーム位置の点からなっている組のそれぞれが、1つの離散的な処置ゾーンに対応している。ビーム位置の点は、ハンドピースの動きの方向と反対の順番に生成されている。
【0096】
図14aおよび14bは、本発明のさらなる実施の形態の例を示しており、ここでは、ビームの平行移動が利用されている。図14aは、複数の光ファイバー(例えば、1404および1406)を備える光ファイバー・アレイ1402の例を示している。1つ以上の照射ビームを、同時または順次に、光ファイバーを通して伝えることができる。図14bは、ファイバー・アレイ1402の側面図である。ファイバー・アレイ1402の遠位端(すなわち、処置対象の組織に最も近い端部)を、ハンドピース(図示されていない)へと接続することができ、さらには/あるいはハンドピースの内部に組み込むことができる。図14bに示した例では、ピエゾ電気素子(PZT)1412が、1つ以上の光ファイバー1404と接しており、さらには/あるいは1つ以上の光ファイバー1404に接続されている。さらにPZT1412は、ファイバー・アレイ1402の固定部1414および/またはハンドピースにも接する。PZT1412は、光ファイバー1404を典型的にはハンドピースの動き1408の方向と反対の方向にずらすように動作する。このようにして、ハンドピースおよび/またはファイバー・アレイ1402が動く際に、光ファイバー1404が、組織の離散的な処置ゾーン(図示されていない)の上方に保持されてぶれに対抗して所望の処置および量を提供する。PZT1412は、組織に対して光ファイバー1404を動かし、さらには/あるいは光ファイバー1404の角度を変化させるように、動作することができる。光ファイバー1404は、典型的には、ファイバー・アレイおよび/またはハンドピースに対する移動および/または曲げが可能であるよう、柔軟である。別個の光ファイバーを別個に動かすことができるよう、1つ以上のPZTを備えて、1つ以上の光ファイバーに接続することができる。
【0097】
本明細書においては、本発明を、添付の図面との関連において説明したが、本発明がここに示された特定の形式に限られないことを理解すべきである。例えば、本発明の方法および装置を、便宜上、人間の組織を微視的なパターンにて処置するために構成されたものとして説明したが、巨視的領域、開放パターン、病変の空間目標、などを処置するシステムの位置パラメータの変化にもとづいて動作パラメータをリアルタイムで調節するプロセスも、本発明の技術的範囲に含まれると考えられる。さらには、本発明は、皮膚の分野には限定されず、光またはレーザによる処置を使用する他の技法においても、本発明を好都合に使用することが可能である。本明細書に記載したレーザによる組織処置方法および装置の設計および構成配置において、他にもさまざまな変更、変形、および向上を、添付の特許請求の範囲に記載される本発明の技術的思想および技術的範囲から離れることなく、行なうことが可能である。
【図面の簡単な説明】
【0098】
【図1】本発明による装置の概略図であり、制御下での組織の処置のためのレーザ出力のフィードバック制御を示している。
【図2】検出器および光学素子を含んでいる本発明によるハンドピースの側面図である。
【図3】目標組織に対するハンドピースの位置パラメータの変化を概略的に示す簡単な断面図である。
【図4A】あらかじめ選択された処置量を維持するパルス状の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図4B】あらかじめ選択された処置量を維持するパルス状の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図5A】あらかじめ選択された処置量を維持する連続波(CW)の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図5B】あらかじめ選択された処置量を維持する連続波(CW)の光放射器において、測定された位置パラメータと、対応して望まれる一組の動作パラメータとの間の相関を示すグラフである。
【図6】検出モードにある図2に示したハンドピースの検出器を詳しく示す図である。
【図7】本発明によってリアルタイムで制御される連続パターンを有するあらかじめ選択された密度の離散的なゾーンで処置される領域のシミュレーションを示している。
【図8】あらかじめ選択された組織の処置の最中の少なくとも1つの位置パラメータ(ハンドピースの速度)の変化にもとづいて、ハンドピースの動作パラメータをリアルタイムで決定および調節する方法のフローチャートの例である。
【図9】ビーム角度の偏向を利用する実施の形態を示す図である。
【図10a】直接のビームの平行移動を使用する実施の形態を示す図である。
【図10b】直接のビームの平行移動を使用する実施の形態を示す図である。
【図10c】直接のビームの平行移動を使用する実施の形態を示す図である。
【図11a】ぶれ防止のために2軸ガルバノメータ走査システムを有する本発明の実施の形態の例を示す図である。
【図11b】ぶれ防止のために2軸ガルバノメータ走査システムを有する本発明の実施の形態の例を示す図である。
【図12】ミラー傾斜アクチュエータを有する本発明の実施の形態の例を示す図である。
【図13】逆回転する光学素子を利用する本発明の実施の形態について、処置ゾーンのシミュレーションを示す図である。
【図14a】ファイバー・アレイおよびピエゾ電気撓みによるぶれ防止アクチュエータを有する本発明の実施の形態の例を示す図である。
【図14b】ファイバー・アレイおよびピエゾ電気撓みによるぶれ防止アクチュエータを有する本発明の実施の形態の例を示す図である。
【符号の説明】
【0099】
100 処置装置、 110 電源、 115 接続部、 120 光放射器、 130 光ファイバー、 140 ハンドピース、 150 目標領域、 155 窓、 160 光学素子、 170 検出器、 200 コントローラ、 202 プロセッサ、 210 インターフェイス・ユニット
【特許請求の範囲】
【請求項1】
制御のもとで組織を処置するための装置であって、
光ビームを受け取って組織内の処置対象領域へと届けるように構成された可動のハンドピースであって、組織の処置の量が、前記光ビームの1つ以上の動作パラメータに依存して決まり、当該ハンドピースの移動が、複数の可変の位置パラメータによって規定され、少なくとも1つの位置パラメータの変化が、組織の処置の量を左右するハンドピースと、
前記ハンドピースに動作可能に接続され、少なくとも1つの位置パラメータの変化に応答して前記動作パラメータを自動的に制御して、制御された量の組織の処置をもたらすコントローラと、
を有している装置。
【請求項2】
前記コントローラは、あらかじめ選択された組織の処置をあらかじめ決定された量で続けることができるよう、新しい処置速度を達成するための少なくとも1つの動作パラメータを、リアルタイムで制御可能に調節するように構成されている請求項1に記載の装置。
【請求項3】
前記コントローラは、決定のためのプロセッサであって、動作パラメータを位置パラメータの関数として連続的に写像することによって、ハンドピースの少なくとも1つの位置パラメータの変化に応答して、望ましい動作パラメータをリアルタイムで計算するように構成されているプロセッサを有する請求項2に記載の装置。
【請求項4】
前記コントローラは、さらに前記プロセッサに動作可能に接続した記憶装置を有し、前記記憶装置が、位置パラメータの変化および対応する動作パラメータからなるデータ・セットを含んでいる請求項3に記載の装置。
【請求項5】
前記可動のハンドピースは、光源からの光ビームを受け取るための光ファイバーに接続されており、前記コントローラは、複数の動作パラメータを制御可能に調節するために前記光源を変化させるように構成されている請求項1に記載の装置。
【請求項6】
前記ハンドピースは、処置対象の組織内の複数の離散的な処置ゾーンへと前記光ビームを届けるための合焦素子をさらに有しており、前記動作パラメータが、前記合焦素子の位置を含んでいる請求項1に記載の装置。
【請求項7】
前記ハンドピースは、作業者の手によって連続的に動かされるように構成されており、前記位置パラメータが、処置対象の組織に対するハンドピースの移動によって規定される請求項1に記載の装置。
【請求項8】
前記位置パラメータは、処置対象の組織に対するハンドピースの速度、ハンドピースから処置対象の組織までの距離、および処置対象の組織に対するハンドピースの位置、のうちの少なくとも1つを含んでいる請求項1に記載の装置。
【請求項9】
処置対象の組織に対するハンドピースの速度をリアルタイムで測定するために、前記コントローラに動作可能に接続された加速度計をさらに有している請求項8に記載の装置。
【請求項10】
検出器をさらに有しており、該検出器が、容量式のセンサである請求項1に記載の装置。
【請求項11】
検出器をさらに有しており、該検出器が、少なくとも1つの画像処理素子と、処置対象の組織に対するハンドピースの速度、距離、および/または位置の変化を計算するための光学式ナビゲーション・センサをさらに有している請求項1に記載の装置。
【請求項12】
コントラスト強調粒子が、処置対象の領域へと加えられる請求項1に記載の装置。
【請求項13】
前記動作パラメータが、放射の速度、出力レベル、光ビームの強度、脈動速度、および処置温度のうちの少なくとも1つを含んでいる請求項1に記載の装置。
【請求項14】
前記コントローラが、新しい処置速度を達成するための少なくとも1つの動作パラメータを、リアルタイムで制御可能に調節するように構成され、組織の処置の量が少なくとも1つの位置パラメータを入力変数とするアルゴリズムにもとづいて制御可能に調節される請求項1に記載の装置。
【請求項15】
コントラスト強調物質が、処置対象の領域へと加えられ、前記コントローラが少なくとも1つの動作パラメータをリアルタイムで制御可能に調節するように構成され、新たな処置速度および新たな処置パターンのうちの少なくとも一方を生じさせる請求項1に記載の装置。
【請求項16】
前記コントラスト強調物質が、複数の粒子、懸濁液、コロイド、乳液、染料、および溶液のうちの少なくとも1つを含んでいる請求項15に記載の装置。
【請求項17】
検出器をさらに有しており、該検出器が、加速度計、光検出器アレイ、容量式センサ・アレイ、表面形状測定計、および光学式ナビゲーション・センサのうちの少なくとも1つである請求項1に記載の装置。
【請求項18】
走査機構をさらに有しており、前記コントローラが前記走査機構の走査パラメータを制御可能に調節するように構成され、前記速度パラメータの変化を補償する請求項1に記載の装置。
【請求項19】
前記走査機構が、ガルバノメータ、ピエゾ電気、機械式の走査素子、MEMs素子、ナノテクノロジー、回転するミラー、回転する光学素子、ホログラフィック素子、反対向きに回転する車輪、回折素子、および音響‐光学素子のうちの少なくとも1つを備えている請求項18に記載の装置。
【請求項20】
前記走査機構および前記コントローラが、ビーム角度の偏向およびビームの平行移動のうちの少なくとも一方を生じさせるように構成されている請求項18に記載の装置。
【請求項21】
前記光ビームが、約700nm〜約3000nmの間の範囲の波長を有し、前記光ビームが、毎秒約50,000パルス未満の範囲の周波数でパルス化され、前記光ビームが、約1mJ〜約1Jの間の範囲のパルスあたりのエネルギーを有し、前記光ビームが、約10J/cm2〜約1000J/cm2の間の範囲の光のフルエンスを有している請求項1に記載の装置。
【請求項22】
前記光ビームについての動作パラメータが、約500ミクロン未満の範囲にある組織表面における直径と、所与の組織領域の上方のハンドピースの1回の通過につき、平方センチメートルあたりに約100〜約2000個の間の範囲の処置ゾーンが存在する処置密度と、隣接する離散的な処置ゾーン間の約75ミクロンよりも大きい離間距離を含んでいる請求項1に記載の装置。
【請求項23】
前記コントローラが、あらかじめ選択された組織の処置を続けるために少なくとも1つの動作パラメータをリアルタイムで制御可能に調節する請求項1に記載の装置。
【請求項24】
コントラスト強調物質が、目標処置部位に塗布され、前記目標処置部位が、検出器によって検出され、前記コントローラおよび前記走査装置が、前記光ビームに前記目標処置部位のみを処置させるように構成されている請求項1に記載の装置。
【請求項25】
あらかじめ選択された組織の処置をもたらすための方法であって、
前記あらかじめ選択された組織の処置を左右する少なくとも1つの動作パラメータを有している少なくとも1つの光ビームを、ハンドピースから処置対象の組織に向かって放射するステップと、
前記ハンドピースを移動させるステップであって、前記ハンドピースの移動が、少なくとも1つの可変の位置パラメータによって規定され、少なくとも1つの位置パラメータの変化が、前記組織の処置の量を左右するステップと、
少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップと、
少なくとも1つの位置パラメータの変化に応答して少なくとも1つの動作パラメータをリアルタイムで制御可能に調節することで、処置速度を調節するステップと、
を含んでいる方法。
【請求項26】
前記ハンドピースを移動させるステップが、前記あらかじめ選択された組織の処置を不連続なパターンにある離散的な複数の処置ゾーンへともたらすために、前記ハンドピースを処置対象の組織に対して連続的に移動させるステップを含んでいる請求項25に記載の方法。
【請求項27】
前記少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップが、処置対象の組織に対するハンドピースの速度、処置対象の組織に対するハンドピースのスピード、ハンドピースから処置対象の組織までの距離、および処置対象の組織に対するハンドピースの位置からなるグループから選択されるパラメータについて変化を検出するステップを含んでいる請求項25に記載の方法。
【請求項28】
前記少なくとも1つの動作パラメータをリアルタイムで調節するステップが、動作パラメータを位置パラメータの関数として写像することによって、望ましい動作パラメータを決定するステップを含んでいる請求項25に記載の方法。
【請求項29】
前記少なくとも1つの動作パラメータをリアルタイムで調節するステップが、出力レベル、光ビームの強度、脈動速度、および処置温度からなるグループから選択される少なくとも1つのパラメータを調節するために、前記光ビームの光源を変化させるステップと、ハンドピースの合焦素子の位置を変化させるステップを含んでいる請求項25に記載の方法。
【請求項30】
前記あらかじめ選択された組織の処置が、あらかじめ決定された量での人間の皮膚の処置を含んでいる請求項25に記載の方法。
【請求項31】
前記少なくとも1つの動作パラメータを制御可能に調節するステップが、前記あらかじめ選択された組織の処置をあらかじめ決定された量にて続けることができるように処置速度を調節する請求項25に記載の方法。
【請求項32】
処置対象の組織へとコントラスト強調物質を塗布するステップをさらに含んでおり、
前記少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップが、前記コントラスト強調物質を検出するステップを含んでいる請求項25に記載の方法。
【請求項33】
前記コントラスト強調物質が、目標の組織処置領域へと塗布され、前記動作パラメータおよび前記位置パラメータのうちの少なくとも1つが、前記光ビームを前記目標の組織処置領域のみに向けるために制御可能に調節される請求項32に記載の方法。
【請求項34】
制御可能に調節するステップが、離散的な処置ゾーンのぶれを回避するように光ビームを走査するステップを含んでいる請求項25に記載の方法。
【請求項1】
制御のもとで組織を処置するための装置であって、
光ビームを受け取って組織内の処置対象領域へと届けるように構成された可動のハンドピースであって、組織の処置の量が、前記光ビームの1つ以上の動作パラメータに依存して決まり、当該ハンドピースの移動が、複数の可変の位置パラメータによって規定され、少なくとも1つの位置パラメータの変化が、組織の処置の量を左右するハンドピースと、
前記ハンドピースに動作可能に接続され、少なくとも1つの位置パラメータの変化に応答して前記動作パラメータを自動的に制御して、制御された量の組織の処置をもたらすコントローラと、
を有している装置。
【請求項2】
前記コントローラは、あらかじめ選択された組織の処置をあらかじめ決定された量で続けることができるよう、新しい処置速度を達成するための少なくとも1つの動作パラメータを、リアルタイムで制御可能に調節するように構成されている請求項1に記載の装置。
【請求項3】
前記コントローラは、決定のためのプロセッサであって、動作パラメータを位置パラメータの関数として連続的に写像することによって、ハンドピースの少なくとも1つの位置パラメータの変化に応答して、望ましい動作パラメータをリアルタイムで計算するように構成されているプロセッサを有する請求項2に記載の装置。
【請求項4】
前記コントローラは、さらに前記プロセッサに動作可能に接続した記憶装置を有し、前記記憶装置が、位置パラメータの変化および対応する動作パラメータからなるデータ・セットを含んでいる請求項3に記載の装置。
【請求項5】
前記可動のハンドピースは、光源からの光ビームを受け取るための光ファイバーに接続されており、前記コントローラは、複数の動作パラメータを制御可能に調節するために前記光源を変化させるように構成されている請求項1に記載の装置。
【請求項6】
前記ハンドピースは、処置対象の組織内の複数の離散的な処置ゾーンへと前記光ビームを届けるための合焦素子をさらに有しており、前記動作パラメータが、前記合焦素子の位置を含んでいる請求項1に記載の装置。
【請求項7】
前記ハンドピースは、作業者の手によって連続的に動かされるように構成されており、前記位置パラメータが、処置対象の組織に対するハンドピースの移動によって規定される請求項1に記載の装置。
【請求項8】
前記位置パラメータは、処置対象の組織に対するハンドピースの速度、ハンドピースから処置対象の組織までの距離、および処置対象の組織に対するハンドピースの位置、のうちの少なくとも1つを含んでいる請求項1に記載の装置。
【請求項9】
処置対象の組織に対するハンドピースの速度をリアルタイムで測定するために、前記コントローラに動作可能に接続された加速度計をさらに有している請求項8に記載の装置。
【請求項10】
検出器をさらに有しており、該検出器が、容量式のセンサである請求項1に記載の装置。
【請求項11】
検出器をさらに有しており、該検出器が、少なくとも1つの画像処理素子と、処置対象の組織に対するハンドピースの速度、距離、および/または位置の変化を計算するための光学式ナビゲーション・センサをさらに有している請求項1に記載の装置。
【請求項12】
コントラスト強調粒子が、処置対象の領域へと加えられる請求項1に記載の装置。
【請求項13】
前記動作パラメータが、放射の速度、出力レベル、光ビームの強度、脈動速度、および処置温度のうちの少なくとも1つを含んでいる請求項1に記載の装置。
【請求項14】
前記コントローラが、新しい処置速度を達成するための少なくとも1つの動作パラメータを、リアルタイムで制御可能に調節するように構成され、組織の処置の量が少なくとも1つの位置パラメータを入力変数とするアルゴリズムにもとづいて制御可能に調節される請求項1に記載の装置。
【請求項15】
コントラスト強調物質が、処置対象の領域へと加えられ、前記コントローラが少なくとも1つの動作パラメータをリアルタイムで制御可能に調節するように構成され、新たな処置速度および新たな処置パターンのうちの少なくとも一方を生じさせる請求項1に記載の装置。
【請求項16】
前記コントラスト強調物質が、複数の粒子、懸濁液、コロイド、乳液、染料、および溶液のうちの少なくとも1つを含んでいる請求項15に記載の装置。
【請求項17】
検出器をさらに有しており、該検出器が、加速度計、光検出器アレイ、容量式センサ・アレイ、表面形状測定計、および光学式ナビゲーション・センサのうちの少なくとも1つである請求項1に記載の装置。
【請求項18】
走査機構をさらに有しており、前記コントローラが前記走査機構の走査パラメータを制御可能に調節するように構成され、前記速度パラメータの変化を補償する請求項1に記載の装置。
【請求項19】
前記走査機構が、ガルバノメータ、ピエゾ電気、機械式の走査素子、MEMs素子、ナノテクノロジー、回転するミラー、回転する光学素子、ホログラフィック素子、反対向きに回転する車輪、回折素子、および音響‐光学素子のうちの少なくとも1つを備えている請求項18に記載の装置。
【請求項20】
前記走査機構および前記コントローラが、ビーム角度の偏向およびビームの平行移動のうちの少なくとも一方を生じさせるように構成されている請求項18に記載の装置。
【請求項21】
前記光ビームが、約700nm〜約3000nmの間の範囲の波長を有し、前記光ビームが、毎秒約50,000パルス未満の範囲の周波数でパルス化され、前記光ビームが、約1mJ〜約1Jの間の範囲のパルスあたりのエネルギーを有し、前記光ビームが、約10J/cm2〜約1000J/cm2の間の範囲の光のフルエンスを有している請求項1に記載の装置。
【請求項22】
前記光ビームについての動作パラメータが、約500ミクロン未満の範囲にある組織表面における直径と、所与の組織領域の上方のハンドピースの1回の通過につき、平方センチメートルあたりに約100〜約2000個の間の範囲の処置ゾーンが存在する処置密度と、隣接する離散的な処置ゾーン間の約75ミクロンよりも大きい離間距離を含んでいる請求項1に記載の装置。
【請求項23】
前記コントローラが、あらかじめ選択された組織の処置を続けるために少なくとも1つの動作パラメータをリアルタイムで制御可能に調節する請求項1に記載の装置。
【請求項24】
コントラスト強調物質が、目標処置部位に塗布され、前記目標処置部位が、検出器によって検出され、前記コントローラおよび前記走査装置が、前記光ビームに前記目標処置部位のみを処置させるように構成されている請求項1に記載の装置。
【請求項25】
あらかじめ選択された組織の処置をもたらすための方法であって、
前記あらかじめ選択された組織の処置を左右する少なくとも1つの動作パラメータを有している少なくとも1つの光ビームを、ハンドピースから処置対象の組織に向かって放射するステップと、
前記ハンドピースを移動させるステップであって、前記ハンドピースの移動が、少なくとも1つの可変の位置パラメータによって規定され、少なくとも1つの位置パラメータの変化が、前記組織の処置の量を左右するステップと、
少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップと、
少なくとも1つの位置パラメータの変化に応答して少なくとも1つの動作パラメータをリアルタイムで制御可能に調節することで、処置速度を調節するステップと、
を含んでいる方法。
【請求項26】
前記ハンドピースを移動させるステップが、前記あらかじめ選択された組織の処置を不連続なパターンにある離散的な複数の処置ゾーンへともたらすために、前記ハンドピースを処置対象の組織に対して連続的に移動させるステップを含んでいる請求項25に記載の方法。
【請求項27】
前記少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップが、処置対象の組織に対するハンドピースの速度、処置対象の組織に対するハンドピースのスピード、ハンドピースから処置対象の組織までの距離、および処置対象の組織に対するハンドピースの位置からなるグループから選択されるパラメータについて変化を検出するステップを含んでいる請求項25に記載の方法。
【請求項28】
前記少なくとも1つの動作パラメータをリアルタイムで調節するステップが、動作パラメータを位置パラメータの関数として写像することによって、望ましい動作パラメータを決定するステップを含んでいる請求項25に記載の方法。
【請求項29】
前記少なくとも1つの動作パラメータをリアルタイムで調節するステップが、出力レベル、光ビームの強度、脈動速度、および処置温度からなるグループから選択される少なくとも1つのパラメータを調節するために、前記光ビームの光源を変化させるステップと、ハンドピースの合焦素子の位置を変化させるステップを含んでいる請求項25に記載の方法。
【請求項30】
前記あらかじめ選択された組織の処置が、あらかじめ決定された量での人間の皮膚の処置を含んでいる請求項25に記載の方法。
【請求項31】
前記少なくとも1つの動作パラメータを制御可能に調節するステップが、前記あらかじめ選択された組織の処置をあらかじめ決定された量にて続けることができるように処置速度を調節する請求項25に記載の方法。
【請求項32】
処置対象の組織へとコントラスト強調物質を塗布するステップをさらに含んでおり、
前記少なくとも1つの位置パラメータの変化をリアルタイムで測定するステップが、前記コントラスト強調物質を検出するステップを含んでいる請求項25に記載の方法。
【請求項33】
前記コントラスト強調物質が、目標の組織処置領域へと塗布され、前記動作パラメータおよび前記位置パラメータのうちの少なくとも1つが、前記光ビームを前記目標の組織処置領域のみに向けるために制御可能に調節される請求項32に記載の方法。
【請求項34】
制御可能に調節するステップが、離散的な処置ゾーンのぶれを回避するように光ビームを走査するステップを含んでいる請求項25に記載の方法。
【図1】

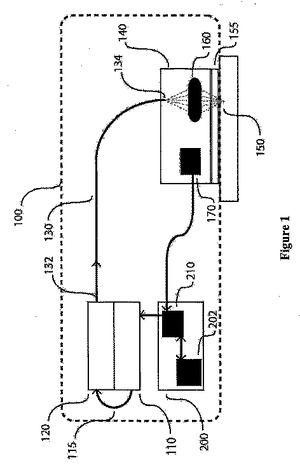
【図2】
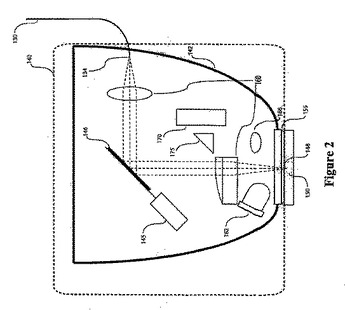
【図3】
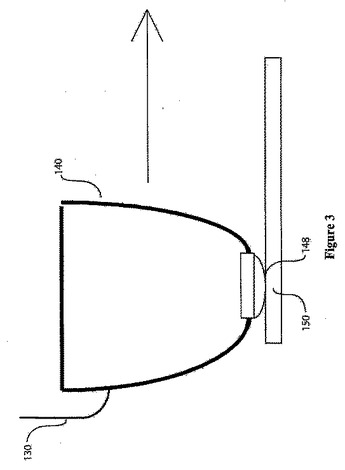
【図4A】
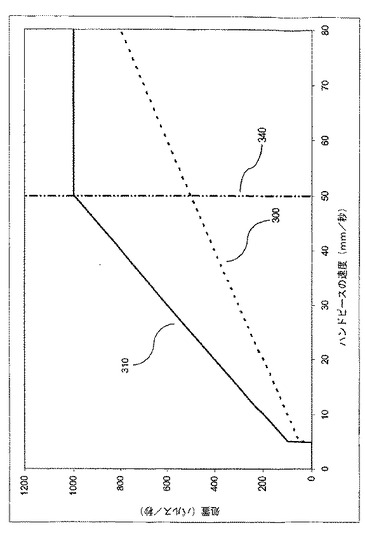
【図4B】
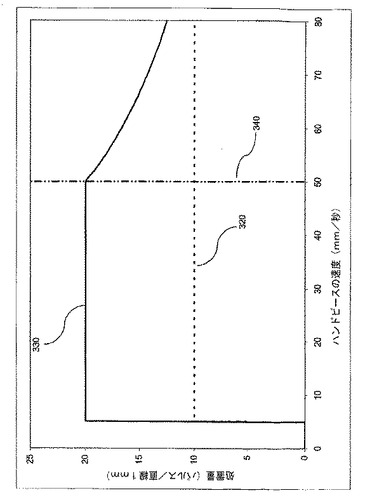
【図5A】
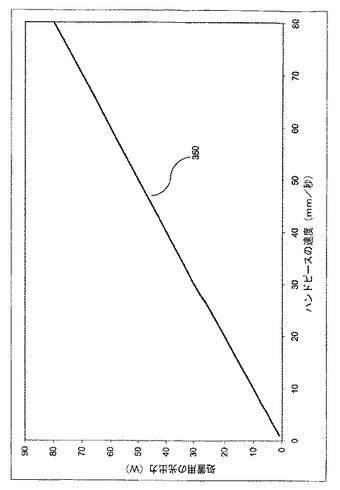
【図5B】
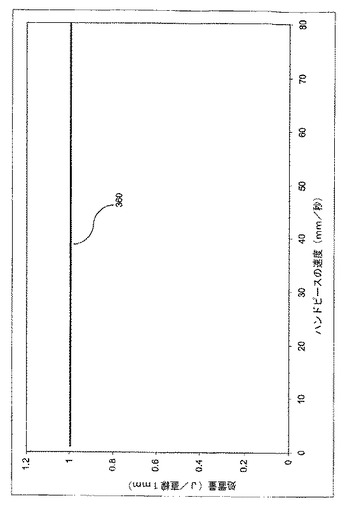
【図6】
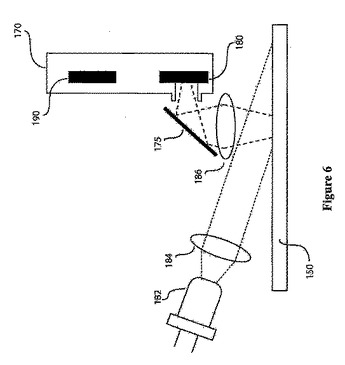
【図7】
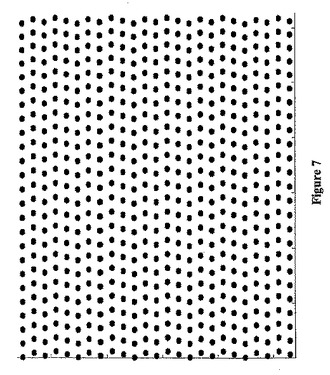
【図8】
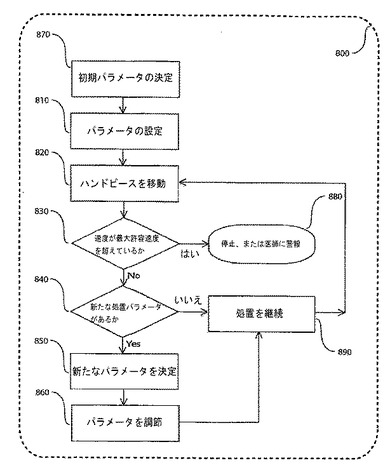
【図9】
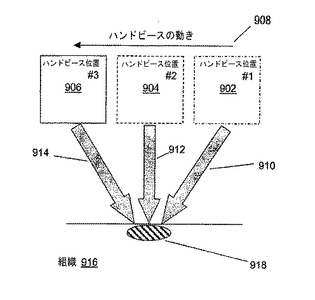
【図10a】
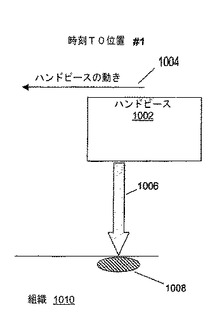
【図10b】
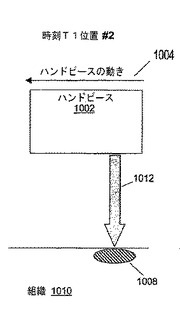
【図10c】
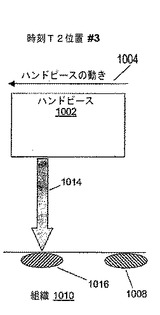
【図11a】
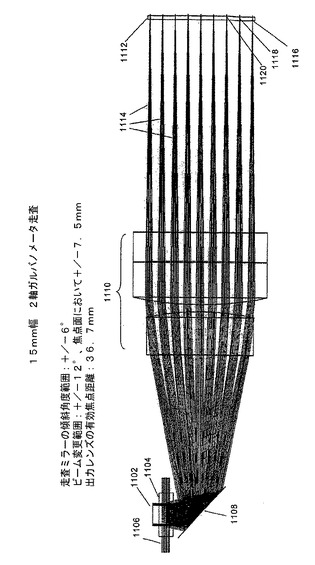
【図11b】
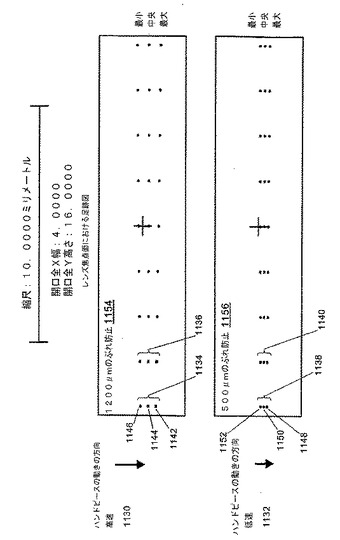
【図12】
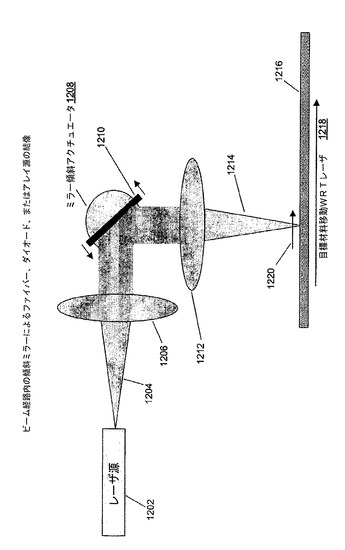
【図13】
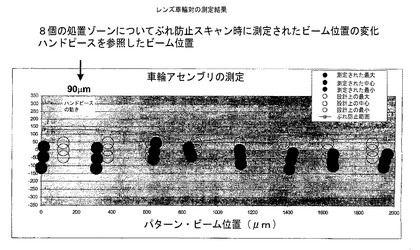
【図14a】
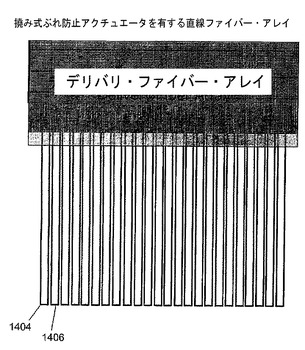
【図14b】
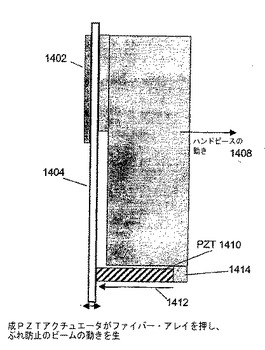
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9】
【図10a】
【図10b】
【図10c】
【図11a】
【図11b】
【図12】
【図13】
【図14a】
【図14b】
【公表番号】特表2007−531558(P2007−531558A)
【公表日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−547512(P2006−547512)
【出願日】平成16年12月22日(2004.12.22)
【国際出願番号】PCT/US2004/043749
【国際公開番号】WO2005/063138
【国際公開日】平成17年7月14日(2005.7.14)
【出願人】(504226009)リライアント・テクノロジーズ・インコーポレイテッド (11)
【氏名又は名称原語表記】RELIANT TECHNOLOGIES, INC.
【Fターム(参考)】
【公表日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成16年12月22日(2004.12.22)
【国際出願番号】PCT/US2004/043749
【国際公開番号】WO2005/063138
【国際公開日】平成17年7月14日(2005.7.14)
【出願人】(504226009)リライアント・テクノロジーズ・インコーポレイテッド (11)
【氏名又は名称原語表記】RELIANT TECHNOLOGIES, INC.
【Fターム(参考)】
[ Back to top ]