
レーザスキャナを操作する方法及びレーザスキャナを備える加工システム

【課題】レーザスキャナを操作する方法であって、より短時間で且つ/又は高精度でレーザスキャナに対する開口等の特定の検出断面の位置を決定する。
【解決手段】レーザスキャナを用いて走査経路に沿ってレーザビーム17を走査し、検出断面に入射するレーザビーム17のレーザ光により生じる光強度を検出するステップと、検出された光強度に基づきレーザスキャナに対する検出断面の位置を決定するステップとを含み、走査経路は、検出断面を含む平面内に第1部分経路223及び第2部分経路225を含み、第1部分経路223及び第2部分経路225は、検出断面を含む平面内の検出断面の直径とレーザビーム17の直径とを足したものよりも短い距離であり、また検出断面を含む平面内のレーザビーム17の直径の0.3倍よりも大きいか又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在する方法。
【解決手段】レーザスキャナを用いて走査経路に沿ってレーザビーム17を走査し、検出断面に入射するレーザビーム17のレーザ光により生じる光強度を検出するステップと、検出された光強度に基づきレーザスキャナに対する検出断面の位置を決定するステップとを含み、走査経路は、検出断面を含む平面内に第1部分経路223及び第2部分経路225を含み、第1部分経路223及び第2部分経路225は、検出断面を含む平面内の検出断面の直径とレーザビーム17の直径とを足したものよりも短い距離であり、また検出断面を含む平面内のレーザビーム17の直径の0.3倍よりも大きいか又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在する方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーザスキャナを操作する方法及びレーザスキャナを備える加工システムに関する。特に、本発明は、レーザスキャナを較正する方法に関する。
【0002】
[関連出願の相互参照]
本願は、独国にて2011年8月4日に出願された「レーザスキャナを較正する方法及びレーザスキャナを備える加工システム(METHOD FOR CALIBRATING A LASER SCANNER AND PROCESSING SYSTEM WITH LASER SCANNER)」と題する特許出願第10 2011 109 449.4号の優先権を主張し、当該出願の内容の全体を参照により本明細書に援用する。
【背景技術】
【0003】
レーザビームを用いて対象物を加工する、例えば対象物の材料特性を変更する、又は対象物から材料を除去することが知られている。この目的で、十分に高いビームエネルギー及び十分な光子エネルギーを有するレーザビームを、レーザスキャナによって対象物の予め決定された加工場所へ指向させる。これは、レーザスキャナの座標系における加工場所の座標の関数としてレーザスキャナの走査偏向を設定することにより行われる。この目的で、所望の加工場所の座標をレーザスキャナの偏向に変換しなければならない。これは、適当な数学的座標変換により達成することができる。
【0004】
このような座標変換は、較正されることが好ましい。これは、例えば、既知の直径を有し座標系における既知の場所に配置した開口の後ろに配置した検出器を用い、レーザビームをレーザスキャナで開口を通して走査することにより達成することができる。開口を通して走査するレーザビームは、対象物の加工も実行するレーザビームとすることができ、又は対象物の加工を実行するレーザビームと既知の関係にあるビーム経路を有する異なるレーザビームであってもよい。検出器により検出される信号に従って、開口の場所に対応するレーザスキャナの走査偏向を決定し、座標変換をそれにより較正することができる。このプロセスを、開口が配置された複数の既知の場所で繰り返すことができる。このような装置及び方法は、特許文献1及び特許文献2から既知であり、当該文献の全開示を参照により本願に援用する。
【0005】
検出器が検出した信号に基づきレーザスキャナに対する開口の位置を決定するには、多大な時間を要し、レーザ加工システムでの対象物の全処理時間が延びる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6,501,061号明細書
【特許文献2】米国特許出願公開第2005/0205778号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記課題を考慮して達成された。
【0008】
本発明の目的は、より短時間で且つ/又は高精度でレーザスキャナに対する開口等の特定の検出断面の位置を決定することを可能にする、レーザスキャナを操作及び較正する方法を提供することである。レーザスキャナを備える対応の加工システムを提供することも、本発明の目的である。
【課題を解決するための手段】
【0009】
本発明の実施形態によれば、レーザスキャナを操作する方法は、レーザビームをレーザスキャナで走査経路に沿って走査することによりレーザスキャナを較正するステップと、検出断面に入射するレーザ光により誘導された光強度を検出するステップと、検出された光強度に基づきレーザスキャナに対する検出断面の位置を決定するステップとを含む。検出断面は、レーザ光に対する検出器の感光性領域又は明確に画定された断面を有する開口により提供することができ、レーザ光の検出器は、開口断面を横断する光を検出する。
【0010】
さらに他の実施形態によれば、レーザスキャナを操作する方法は、レーザビームをレーザスキャナで走査経路に沿って走査するステップを含み、走査経路は、検出断面を含む平面内に第1部分経路及び第2部分経路を含み、第1部分経路及び第2部分経路は、この平面内の検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、また当該平面内のレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、並んで延在する。したがって、第1部分経路に沿ったレーザビームの走査及び第2部分経路に沿ったレーザビームの走査それぞれにより、相互に比較できる別個に検出可能な光強度が得られるので、2つの部分経路に対する、ひいてはレーザスキャナに対する検出断面の場所の比較的正確な決定が促進される。
【0011】
さらに他の実施形態によれば、本方法は、第1部分経路と第2部分経路との間の距離を一定に維持可能なまま、第1部分経路及び第2部分経路を変位させることにより走査経路を繰り返し変更するステップをさらに含む。第1部分経路及び第2部分経路の変位による走査経路の繰り返し変更は、第1部分経路に沿った走査時に得られる検出された光強度と第2部分経路に沿った走査時に得られる光強度とが実質的に等しくなるまで、且つ/又はこれら光強度間の差が実質的にゼロになるまで行うことができる。
【0012】
このとき、検出断面の中心が2つの部分経路間のちょうど中間に位置付けられると結論付けることができる。したがって、検出断面の領域における2つの部分経路の延在方向に対して垂直な方向に見た場合、レーザスキャナに対する検出断面の位置を正確に決定することができる。
【0013】
特定の実施形態によれば、レーザビームは、第3部分経路及び第4部分経路に沿ってさらに走査され、第3部分経路及び第4部分経路は、検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、またレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、検出断面の平面内に延在し、検出断面の領域において、第3部分経路は、第1経路に対して30°よりも大きい、特に50°よりも大きい、特に70°よりも大きい角度で延びる。特に、この角度は実質的に90°であり得る。したがって、第3部分経路及び第4部分経路の延在方向に対して垂直な方向のレーザスキャナに対する検出断面の位置を正確に決定することも可能である。したがって、第1部分経路及び第2部分経路に対して垂直な検出断面の位置の決定と共に、検出断面の位置の正確な決定が、検出断面の平面内における2つの独立した方向で可能である。
【0014】
例示的な実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路はそれぞれ、相互に平行に又は/且つ相互に一定の距離だけ離れて延在する。他の実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路はそれぞれ、直線に沿って延在する。
【0015】
さらに他の例示的な実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路は逆方向に走査される。これにより、2つの部分経路それぞれをその後繰り返し走査することが可能となる。
【0016】
さらに他の実施形態によれば、検出断面は、加工すべき対象物を取り付けるための対象物ホルダに設けられ、本方法は、レーザスキャナに対する検出断面の位置に基づきレーザスキャナの座標系と対象物ホルダの座標系との間の座標変換を求めるステップも含む。すると、これにより、レーザビームをレーザスキャナにより対象物ホルダ又はそれに取り付けた対象物の任意の所望の場所へ指向させることが可能となる。本明細書中の実施形態によれば、本方法は、レーザスキャナにより対象物の所望の場所へ指向させたレーザビームで対象物を加工するステップも含む。レーザビームは、この場合、レーザスキャナに対する検出断面の位置を定めるために用いるのと同じレーザビームとすることができ、又はこれとは異なる対象物の加工用のレーザビームであり、同じくレーザスキャナにより制御され、レーザスキャナに対する検出断面の位置を定めるのに用いるレーザビームと既知の関係にあるビーム経路を有するレーザビームであってもよい。対象物の加工は、特に、対象物の材料特性の変更及び対象物からの材料の除去であり得る。
【0017】
例示的な実施形態によれば、この場合、対象物ホルダに複数の検出断面、例えば3つの検出断面等を設け、レーザスキャナに対する複数の検出断面それぞれの位置を決定し、且つ複数の検出断面の具体的な位置に基づき座標変換を求めることが可能である。したがって、適切な座標変換を高精度で定めることが可能である。複数の検出断面の位置は、単一の検出断面について上述したのと同様にそれぞれ定められる。
【0018】
実施形態によれば、上述の方法を実行するよう構成された、レーザスキャナを含む加工システムも提供される。
【0019】
他の実施形態によれば、加工システムは、レーザスキャナと、所定の検出断面に入射するレーザ光用の検出器と、レーザスキャナを制御し且つ検出器から検出信号を受け取るコントローラとを備え、コントローラは、走査経路に沿ってレーザビームを走査するようにレーザスキャナを制御するよう構成され、走査経路は、検出断面を含む平面内に第1部分経路及び第2部分経路を含み、第1部分経路及び第2部分経路は、検出断面を含む平面内の検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、また検出断面を含む平面内のレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、並んで延在し、コントローラは、第1部分経路に沿った走査時に検出断面に入射するレーザ光により生じる検出された第1光強度を、第2部分経路に沿った走査時に検出断面に入射するレーザ光により生じる検出された第2光強度と比較するよう構成された制御モジュールを含む。
【0020】
本明細書中の特定の実施形態によれば、加工システムは、少なくとも1つの粒子ビームカラムも含み、これは粒子ビームカラムに対する1つ又は複数の検出断面の位置を検出するよう構成される。少なくとも1つの粒子ビームカラムは、対象物の顕微鏡像を得るか、対象物に材料を堆積するか、又は対象物から材料を除去するよう構成することもできる。
【0021】
本発明の上記の又は他の有利な特徴は、添付図面を参照した以下の例示的な実施形態の詳細な説明からより明確となるであろう。可能な実施形態の全てが本明細書中に示す利点のそれぞれ又はいずれかを必ずしも示すとは限らないことに留意されたい。
【図面の簡単な説明】
【0022】
【図1】レーザ加工システムの概略図である。
【図2】図1に示すレーザ加工システムで用いることができる対象物ホルダの断面の概略図である。
【図3a】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図3b】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図3c】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図4】可能な走査経路のさらに別の概略図である。
【図5】加工システムのコントローラの一部の概略図である。
【図6】加工システムのさらに別のコントローラの一部の概略図である。
【発明を実施するための形態】
【0023】
以下で説明する例示的な実施形態において、機能及び構造が同様のコンポーネントは可能な限り同様の参照符号で示す。したがって、特定の実施形態の個々のコンポーネントの特徴を理解するには、他の実施形態及び発明の概要の説明を参照されたい。
【0024】
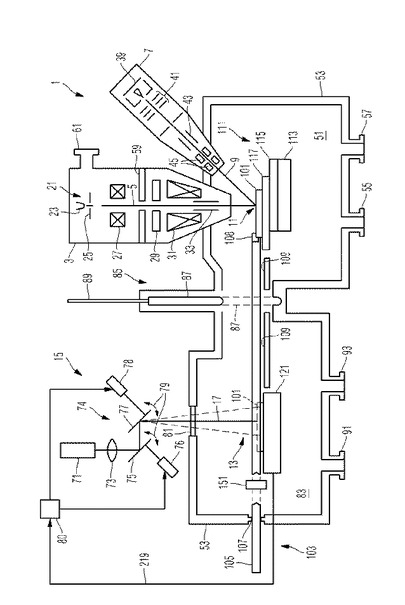
図1は、加工システム1の概略図である。この加工システムは、レーザビーム及び複数の粒子ビームで対象物の加工を実行するよう構成される。このようなシステムに関する背景情報は、例えば、米国特許出願公開第2011/0198326号明細書で見ることができ、当該出願の全開示を参照により本特許出願に援用する。
【0025】
加工システム1は、2つの粒子ビームカラム、すなわち電子ビーム5を発生させる電子ビームカラム3及びイオンビーム9を発生させるイオンビームカラム7を含み、イオンビーム9は、電子ビーム5のように加工領域11内の場所へ指向させる。
【0026】
電子ビームカラム3は、電子ビーム5を加工領域11内に配置した対象物へ指向させるよう働き、また相互作用粒子、例えば二次電子、後方散乱電子、若しくは透過電子、及び/又はX線若しくはカソードルミネッセンス光(cathodoluminescence radiation)等の相互作用放射線を検出するよう働く。電子ビームを対象物上の種々の場所へ指向させ、検出された強度をそれらの場所に関連付ければ、対象物の一部の電子顕微鏡像を求めることができる。このような電子顕微鏡像に基づき、さらなる加工を必要とする対象物上の加工場所を決定することが可能である。さらなる加工は、加工場所における材料の堆積又は加工場所からの材料の除去を含み得る。
【0027】
イオンビームカラム7を用いて、イオンビーム9をこのような加工場所へ指向させる。イオンビーム9は、対象物加工場所における材料を除去することができ、表面上への材料の堆積を誘発することもできる。この目的で、イオンビームにより活性化されるプロセスガスを加工場所に供給すること、及び対象物から材料を除去するか又は対象物に材料を堆積することが可能である。イオンビームは、電子ビームと同様に、対象物の像の生成に用いることもできる。
【0028】
イオンビーム9による対象物からの材料の除去は、限定された速度でしか可能でない。イオンビームにより施される除去速度では時間がかかりすぎるような材料除去が望まれる場合、材料除去をレーザビームにより行うことができる。これを行うために、レーザスキャナ74が発するレーザビーム17の走査領域13に対象物を搬送して、レーザビームを用いて対象物から材料を除去する。レーザビームによる材料除去の速度は、イオンビームによる速度よりも速い。したがって、比較的速い材料除去速度がレーザビームで得られる。
【0029】
電子ビームカラム3は、カソード23及びアノード25を含む電子源21と、ビーム5を発生させるコンデンサレンズ系27と、例えばカラム3内に配置される二次電子検出器29と、電子ビーム5を加工領域11内に集束させる対物レンズ31とを備える。ビームデフレクタ33を設けて、対象物への電子ビーム5の入射場所を変え、例えば対象物の表面の加工領域を走査し、且つ二次電子等の生成又は放出された粒子を検出器29で検出することで、走査した加工領域11における対象物の電子顕微鏡像を得るようにする。
【0030】
イオンビームカラム7は、イオン源39と、イオンビーム9を形成及び加速する電極41と、ビームデフレクタ43と、集束コイル若しくは集束電極45とを備えることで、イオンビーム9を加工領域11内に集束させて対象物の一領域にわたって走査するようにする。
【0031】
真空空間51が真空室壁53により画定されており、真空室壁53は、真空ポンプに接続したポンプポート55を有し、ポート57を介して換気される。プロセスガスを真空室51に導入した場合でも電子源21を十分な真空下で永久に維持するために、電子カラム3は、開口59及びさらに別のポンプポート61を備えることで、電子源21を含む真空部分を別個の真空ポンプにより排気するようにする。
【0032】
試料の加工に複数の粒子ビームを用いるシステムに関する背景情報は、米国特許出願公開第2005/0184251号明細書、米国特許第6,855,938号明細書、及び独国特許第10 2006 059 162号明細書から得ることができ、上記公報の全開示を参照により本願に援用する。
【0033】
レーザシステム15は、レーザビーム17を整形及び集束するためにレーザ71及びレンズ73を含む。レーザビーム17を、1つ又は複数のミラー又は光ファイバライトガイドを介して真空空間83の真空室壁53付近の場所へ指向させ、そこで2つの走査ミラー75、77を含むレーザスキャナ74に入射させ、走査ミラー75、77を、矢印79で示すようにアクチュエータ76又は78により枢動させることができる。アクチュエータ76、78によるミラー75、77の枢動は、相互に対して角度をなした向きの、特に相互に直交する方向に行われるので、レーザビーム17は、2つのミラー75及び77での反射後に2つの独立した方向に偏向されて走査領域13を走査することができる。
【0034】
図示の例では、レーザスキャナ74は、それぞれが1方向に枢動できる2つの走査ミラーを備える。他の例では、レーザスキャナは、2つの独立した方向に枢動できる1つの走査ミラーのみを備える。レーザスキャナの他の変形形態も考えられる。
【0035】
アクチュエータ76及び78は、より詳細に後述するようにコントローラ80により制御される。
【0036】
レーザビーム17は、真空室壁53により同じく画定された真空空間83に窓81を通して入る。真空空間83は、ドア85により真空空間51から隔てることができる。図1は、ドア85の板87について、ドアの開放位置の状態を実線で、ドア85の閉鎖位置の状態を破線で示す。ドアのアクチュエータロッド89を用いて、板87を変位させ、ドア85をその開放位置からその閉鎖位置へ、またその逆へ移動させる。ドア85は、真空空間51及び83内で異なる真空圧を維持するために、室壁53から封鎖することにより真空クロージャとして実施することができる。この場合、真空室83は、真空ポンプに接続したポンプポート91を介して排気させ、さらに別のポート93を介して換気させることができる。
【0037】
加工すべき対象物は、対象物ホルダ101に取り付け、対象物ホルダ101と共に2つの位置間で往復搬送させることができる。この目的で、連結器108を一端に有するロッド105を備える搬送アセンブリ103を設け、連結器108で対象物ホルダ101を保持することで、対象物を粒子ビーム5及び9の加工領域11に配置する図1の右側位置から、対象物をレーザビーム17の加工領域13内に配置する図1の左側位置へ、対象物ホルダを引き込むことができる。同様に、対象物ホルダ101は、搬送アセンブリ103により図1の左側位置から図1の右側位置へ搬送することができる。搬送アセンブリ103は、この目的で、真空室壁53に設けられてロッド105を貫通させる真空シール107も含み、これは、真空空間51及び83を換気する必要なく、ロッド105の変位による対象物ホルダ101の2つの位置間での搬送を可能にする。対象物ホルダ101の搬送中にこれを支持するために、レール109を設けることができる。対象物ホルダ101が図1の右側位置で真空空間51内に配置されている場合、ロッド105の連結器108を対象物ホルダ101から解放することができるので、ロッド105を真空室51から除去してドア85を閉鎖することができる。
【0038】
対象物ホルダ101が真空空間51内に配置されている場合、対象物ホルダ101は位置決め装置111により支持され、位置決め装置111を用いて、対象物ホルダ101を粒子ビーム5及び9に対して変位させることで、ビームを選択可能な方向から対象物ホルダ101の選択可能な場所へ指向させることができる。この目的で、位置決め装置111は、ベース113と、対象物ホルダ101が固定されるコンポーネント117を担持する1つ又は複数の中間コンポーネント115とを備える。コンポーネント113、115、及び117を相互に対して移動させて、3次元x、y、及びzでの対象物ホルダ101の変位を可能にすることができ、コンポーネントは、粒子ビーム5及び9に対する対象物ホルダ101の向きを変えるために相互に対して回転可能でもあり得る。
【0039】
図1の左側位置における真空空間83内では、対象物ホルダ101を位置決め装置121上に配置し、位置決め装置121は、レーザスキャナ15の加工領域13における対象物ホルダ101の位置決めを可能にする。
【0040】
レーザビーム加工を粒子ビーム検査又は粒子ビーム加工と組み合わせることができる加工システムのさらに他の実施形態は、米国特許出願公開第2010/0051828号明細書に記載されており、その全開示を参照により本明細書に援用する。
【0041】
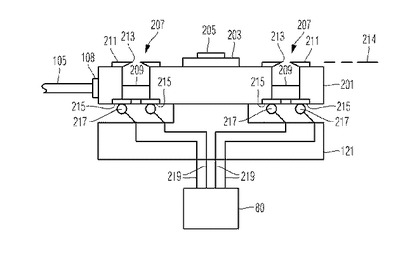
図2は、図1の左側位置における対象物ホルダ101の概略断面図を示す。対象物ホルダ101は、対象物台203を取り付けたベース体201を含み、対象物台203は加工すべき対象物205を担持する。
【0042】
図示の例では、ベース体201は、3つの光検出器207を含み、図2の断面ではそのうちの2つを示す。光検出器207はそれぞれ、開口213を有する開口板211から離れて配置した光センサ209を備える。開口213は、明確に画定された検出断面を形成し、光がセンサ209により検出されるために光検出器207に入ることができる断面積を画定する。検出器207は、光センサ209の2つの接点215も備え、接点215は、ベース体201の底面で相互に離間しており(insolated)、対象物ホルダ101が位置決め装置121上に位置決めされると位置決め装置121に設けられた対応のばね接点217と接触できるようになっている。ばね接点217は、導体219を介してコントローラ80に接続されることで、センサ209の検出信号を受け取ることができる。
【0043】
画定された断面213を有する光検出器207を用いて、レーザスキャナ74と対象物ホルダ101の座標系との間の座標変換を求め、レーザビーム17を対象物205上の所望の場所へ指向できるようにする。この目的で、レーザスキャナの座標系における検出断面213の位置を決定することが必要である。この目的のための手順を、図3a、図3b、及び図3cを参照して以下で説明する。
【0044】
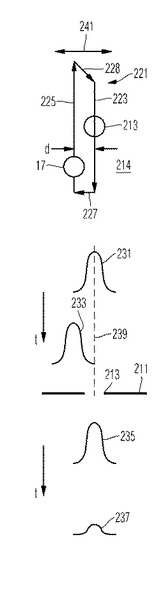
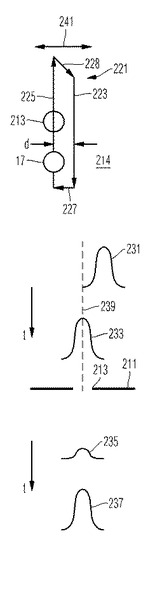
図3aの上段部は、検出断面213が配置される平面214と、レーザビーム17を操作する走査経路221との図を示す。走査経路221は、第1部分経路223と、第1部分経路223から距離dだけ離れて配置した第2部分経路225とを含む。第1部分経路223及び第2部分経路225を中間経路227及び228により相互に接続し、第1部分経路223、中間経路227、第2部分経路225、中間経路228、及び続いて再度第1部分経路223が、順次繰り返し走査されるようにする。2つの部分経路223及び225は、相互に逆方向に走査される。図示の例では、中間経路227は、一方の部分経路の終わりと他方の部分経路の始まりとの間の最短直線接続部である。しかしながら、中間経路が、直線形状ではなく湾曲形状等の異なる形状を有することも可能である。レーザスキャナ74の走査位置が一方の部分経路の終わりから他方の部分経路の始まりへ移行する際に、レーザビームを停止させることも可能である。
【0045】
図示の例では、第1部分経路223及び第2部分経路225は直線状である。しかしながら、部分経路は、より詳細に後述するように相互に距離dだけ離れて延びていれば、曲線(curved lines)又は円弧若しくは渦巻等の一般曲線(general curves)を辿ることもできる。
【0046】
検出断面213の平面内のレーザビーム17の直径を、図3aの上段部に円として示す。実際には、レーザビームは、図3aの中段部に示すように例えばガウシアンプロファイルである強度プロファイルを有し、図中、曲線は第1部分経路223に沿った走査中のレーザビーム231の強度プロファイルを表し、曲線233は第2部分経路225に沿った走査中のレーザビーム17の強度プロファイルの場所を表す。ここでは、第1部分経路223を最初に走査し、第2部分経路225を第1部分経路の後に走査して、第2強度プロファイル233が時間軸tに沿って第1強度プロファイル231よりも後に生じるようにすると考える。
【0047】
図3aの下段部において、曲線235は、コントローラ80が検出し、且つ検出断面213を有する開口板211の下流に配置した光センサ209が発生させる強度信号を表す。強度信号は、第1部分経路223に沿った走査中にレーザビームプロファイル213により発生する。第1部分経路223は、図3aに示す例では検出断面213の中心239と一致し、信号235は最大強度を有する。
【0048】
図3aの下段部における曲線237は、第2部分経路225に沿ったレーザビーム17の走査中にビームプロファイル233により発生する検出信号を表す。第2部分経路225は第1部分経路223から離れて配置されるので、第2部分経路225は検出断面の中心239と一致しないことで、検出断面213を通過して光センサ209に達するレーザ光の強度が低くなり得る。したがって、信号237は、信号235よりも低い強度を有する。図示の例では、第1部分経路223を第2部分経路225の前に走査するので、信号237は信号235に対して時間(t)だけ遅れる。
【0049】
レーザスキャナに対する検出断面213の位置を定めるために、続いて、第1部分経路223をその延在方向を横断する方向にいくらか変位させ、信号235の強度を解析することが可能となる。信号の強度が最大となる変位のためには、第1部分経路223が検出断面213のちょうど中心を通過して、検出断面213の中心の位置を第1部分経路223の延在方向に対して垂直な方向で決定し、部分経路223の延在方向に対して垂直な走査偏向と一致させることができるようにする。しかしながら、信号235の強度は、部分経路223の位置の変動に伴い僅かにしか変わらないので、このように、レーザスキャナ74に対する検出断面213の位置は、比較的低い精度でしか決定することができない。
【0050】
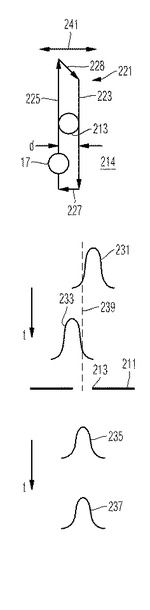
図示の例では、位置の決定は、部分経路223及び225を繰り返し走査することにより行われ、その際、両部分経路223及び225の場所を方向241に連続的に変位させる。図3b及び図3cの上段部は、この連続変位の2つの例を示す。図3bの上段部では、検出断面213は2つの部分経路223及び225間の中央にあり、図3bの下段部に示すように、2つのビームプロファイル231及び233から等しい強度の検出信号235又は237が得られるようになっている。図3cでは、変位をさらに大きくして、第2部分経路225が検出断面213の中心239と一致するようにする。したがって、図3cの下段部に示すように、第2部分経路225の走査中に発生する検出信号237は、第1部分経路223の走査中に発生する検出信号235よりも大きい。
【0051】
図示の例では、2つの部分経路223及び225の延在方向を横断する方向の検出断面213の位置の決定は、2つの部分経路223及び225を含む走査経路を変位させて、2つの検出信号235及び237が同じ強度を有するか又はこれら2つの強度間の差が最小若しくはゼロに等しくなるようにするよう行われる。これには、部分経路の変位が軽微であっても2つの検出信号235及び237間の差が比較的大きくなるので、検出断面の位置を高精度で検出できるという利点がある。レーザスキャナの座標系における検出断面213の中心239の位置は、このとき、部分経路223、225の延在方向を横断する方向の走査偏向間の中心点に対応する。
【0052】
この目的で、2つの部分経路223及び225を相互に離間して位置付ける必要があり、その際の距離は、レーザビーム17の光が第1部分経路223に沿った走査時及び第2部分経路225に沿った走査時に検出断面213に入射するよう選択する。したがって、2つの部分経路223、225間の距離dは、検出断面213の直径に基づき決定される値とレーザビーム17の直径に基づき決定される値とを足したものよりも小さくすべきである。検出断面213の直径に基づき決定される値は、例えば、検出断面213自体の直径と同じ大きさであるよう選択することができ、又は検出断面213の直径の0.9倍若しくは0.8倍等、僅かに小さくすることができる。同様に、レーザビーム17の直径に基づき決定される値は、例えば、検出断面自体の平面内のレーザビーム17の直径と同じ大きさであるよう選択することができ、又は検出断面の平面内のレーザビーム17の直径の0.9倍若しくは0.8倍等、僅かに小さくすることができる。
【0053】
レーザビーム17の直径は、従来の方法により定めることができる。例えば、ガウス断面(Gaussian cross-section)又は同様のビーム断面では、ビームの直径を、例えばビーム強度の90%が直径内にあり、ビーム強度の10%が直径外にあるよう定めることができる。
【0054】
また、部分経路223及び225が方向241に移動する際に2つの信号235及び237の強度間の差が著しく変わるように、2つの部分経路223及び225間の距離dが小さすぎないようにすべきである。例えば、距離dは、レーザビームの直径の0.3倍、0.4倍、又は0.4倍よりも大きくすべきであり、且つ/又は検出断面の直径の0.3倍、0.4倍、又は0.5倍よりも大きくすべきである。
【0055】
図3a〜図3cに基づき説明した方法では、検出断面213の位置を一方向で、すなわち部分経路223及び225の延在方向に直交する方向で、正確に検出することができる。
【0056】
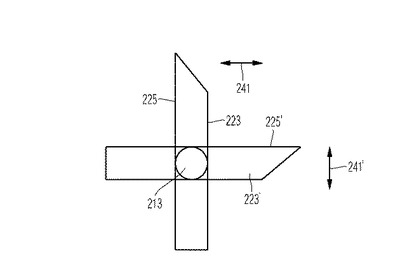
図4は、検出断面213の位置を2つの独立した方向で検出することができる実施形態を示す。
【0057】
この実施形態では、最初に、図3a〜図3cを参照して上述したように、部分経路223及び225の延在方向を横断する方向で位置を決定する。続いて、第3部分経路223’及び第4部分経路225’を繰り返し走査することにより走査経路を変更するが、その際、第3部分経路223’及び第4部分経路225’を、第1部分経路223及び第2部分経路225に対して90°の角度に向ける。部分経路223’及び225’の位置を、2つの検出された信号がほぼ等しくなるまで、又はこれら2つの信号間の差が最小又はゼロに等しくなるまで、方向241’に変える。したがって、検出断面213の中心の位置は、方向241及び目的方向241’の両方で正確に定められる。
【0058】
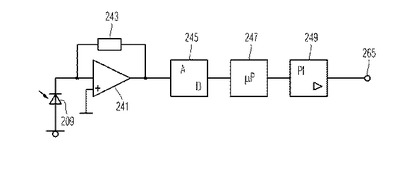
図5は、上述した検出信号の解析を実行するためのコントローラ80の一部の概略図である。光センサ209の検出信号は、導体219を介してコントローラ80へ伝送される。信号は、演算増幅器241及び抵抗243を備える電流電圧変換器により変換され、アナログデジタル変換器245によりデジタル信号にさらに変換される。アナログデジタル変換器245により出力されたデジタル信号は、マイクロプロセッサ247により解析され、マイクロプロセッサ247は、検出された信号の発生時間及び強度を判定することにより判定された強度を相互に比較するよう構成される。マイクロプロセッサ247は、2つの時間的に連続した信号をそれらの強度に関して比較し、強度の差を求める。この差は、PIコントローラ249へ出力され、PIコントローラ249はさらに、走査経路の変位のための制御信号を出力265において供給する。走査経路を発生させて、レーザビーム17を走査経路に沿って指向させるようレーザスキャナ74のアクチュエータ76、78を制御するコントローラ80のさらに別のコンポーネントが、出力265において供給された信号265を読み取り、この信号に応じて走査経路を変位させる。
【0059】
したがって、図5に概略的に示す回路では、第1部分経路223に沿った走査時及び第2部分経路225に沿った走査時に発生する2つの検出信号が同じ強度を有するまで、走査経路を変位させることが可能である。
【0060】
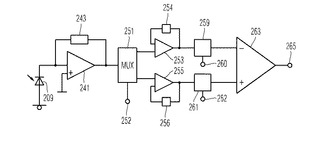
図6は、図5に示すコントローラの部分の代替的な実施形態を示す。この実施形態では、センサ209が発生させた信号が、演算増幅器241及び抵抗を備える電流電圧変換器を用いてこの場合も変換される。しかしながら、変換された信号は、マルチプレクサ251を介してフィードバック抵抗254を有する第1演算増幅器253とフィードバック抵抗256を有する第2演算増幅器255とに交互に供給され、第1演算増幅器253は第1部分経路223に沿った走査時に発生する信号を常に受け取り、第2演算増幅器255は第2部分経路225に沿った走査時に発生する信号を常に受け取るようになっている。マルチプレクサ251は、同期入力又はリセット入力252を含み、これを介して第1部分経路223の各横断の開始時にリセットされる。
【0061】
演算増幅器253、255の出力は、ラッチメモリ259及び261にそれぞれ接続され、ラッチメモリ259及び261は、増幅信号の最大値を記憶してその最大値を後続の比較器263へ供給する。したがって、比較器の出力265において供給される信号は、第1部分経路及び第2部分経路それぞれの横断中に検出された光強度の差を表す。ラッチメモリ259及び261はそれぞれ、リセット入力260又は262を有するので、第1走査経路及び第2走査経路の各横断前にマルチプレクサ251と共にリセットすることができる。
【0062】
本発明をその特定の例示的な実施形態に関して説明したが、多くの代替形態、変更形態、及び変形形態が当業者には明らかとなるであろう。したがって、本明細書に記載した本発明の例示的な実施形態は、説明を意図したものであり、決して限定を意図したものではない。添付の特許請求の範囲に記載される本発明の趣旨及び範囲から逸脱せずに、様々な変更を加えることができる。
【技術分野】
【0001】
本発明は、レーザスキャナを操作する方法及びレーザスキャナを備える加工システムに関する。特に、本発明は、レーザスキャナを較正する方法に関する。
【0002】
[関連出願の相互参照]
本願は、独国にて2011年8月4日に出願された「レーザスキャナを較正する方法及びレーザスキャナを備える加工システム(METHOD FOR CALIBRATING A LASER SCANNER AND PROCESSING SYSTEM WITH LASER SCANNER)」と題する特許出願第10 2011 109 449.4号の優先権を主張し、当該出願の内容の全体を参照により本明細書に援用する。
【背景技術】
【0003】
レーザビームを用いて対象物を加工する、例えば対象物の材料特性を変更する、又は対象物から材料を除去することが知られている。この目的で、十分に高いビームエネルギー及び十分な光子エネルギーを有するレーザビームを、レーザスキャナによって対象物の予め決定された加工場所へ指向させる。これは、レーザスキャナの座標系における加工場所の座標の関数としてレーザスキャナの走査偏向を設定することにより行われる。この目的で、所望の加工場所の座標をレーザスキャナの偏向に変換しなければならない。これは、適当な数学的座標変換により達成することができる。
【0004】
このような座標変換は、較正されることが好ましい。これは、例えば、既知の直径を有し座標系における既知の場所に配置した開口の後ろに配置した検出器を用い、レーザビームをレーザスキャナで開口を通して走査することにより達成することができる。開口を通して走査するレーザビームは、対象物の加工も実行するレーザビームとすることができ、又は対象物の加工を実行するレーザビームと既知の関係にあるビーム経路を有する異なるレーザビームであってもよい。検出器により検出される信号に従って、開口の場所に対応するレーザスキャナの走査偏向を決定し、座標変換をそれにより較正することができる。このプロセスを、開口が配置された複数の既知の場所で繰り返すことができる。このような装置及び方法は、特許文献1及び特許文献2から既知であり、当該文献の全開示を参照により本願に援用する。
【0005】
検出器が検出した信号に基づきレーザスキャナに対する開口の位置を決定するには、多大な時間を要し、レーザ加工システムでの対象物の全処理時間が延びる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許第6,501,061号明細書
【特許文献2】米国特許出願公開第2005/0205778号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は、上記課題を考慮して達成された。
【0008】
本発明の目的は、より短時間で且つ/又は高精度でレーザスキャナに対する開口等の特定の検出断面の位置を決定することを可能にする、レーザスキャナを操作及び較正する方法を提供することである。レーザスキャナを備える対応の加工システムを提供することも、本発明の目的である。
【課題を解決するための手段】
【0009】
本発明の実施形態によれば、レーザスキャナを操作する方法は、レーザビームをレーザスキャナで走査経路に沿って走査することによりレーザスキャナを較正するステップと、検出断面に入射するレーザ光により誘導された光強度を検出するステップと、検出された光強度に基づきレーザスキャナに対する検出断面の位置を決定するステップとを含む。検出断面は、レーザ光に対する検出器の感光性領域又は明確に画定された断面を有する開口により提供することができ、レーザ光の検出器は、開口断面を横断する光を検出する。
【0010】
さらに他の実施形態によれば、レーザスキャナを操作する方法は、レーザビームをレーザスキャナで走査経路に沿って走査するステップを含み、走査経路は、検出断面を含む平面内に第1部分経路及び第2部分経路を含み、第1部分経路及び第2部分経路は、この平面内の検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、また当該平面内のレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、並んで延在する。したがって、第1部分経路に沿ったレーザビームの走査及び第2部分経路に沿ったレーザビームの走査それぞれにより、相互に比較できる別個に検出可能な光強度が得られるので、2つの部分経路に対する、ひいてはレーザスキャナに対する検出断面の場所の比較的正確な決定が促進される。
【0011】
さらに他の実施形態によれば、本方法は、第1部分経路と第2部分経路との間の距離を一定に維持可能なまま、第1部分経路及び第2部分経路を変位させることにより走査経路を繰り返し変更するステップをさらに含む。第1部分経路及び第2部分経路の変位による走査経路の繰り返し変更は、第1部分経路に沿った走査時に得られる検出された光強度と第2部分経路に沿った走査時に得られる光強度とが実質的に等しくなるまで、且つ/又はこれら光強度間の差が実質的にゼロになるまで行うことができる。
【0012】
このとき、検出断面の中心が2つの部分経路間のちょうど中間に位置付けられると結論付けることができる。したがって、検出断面の領域における2つの部分経路の延在方向に対して垂直な方向に見た場合、レーザスキャナに対する検出断面の位置を正確に決定することができる。
【0013】
特定の実施形態によれば、レーザビームは、第3部分経路及び第4部分経路に沿ってさらに走査され、第3部分経路及び第4部分経路は、検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、またレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、検出断面の平面内に延在し、検出断面の領域において、第3部分経路は、第1経路に対して30°よりも大きい、特に50°よりも大きい、特に70°よりも大きい角度で延びる。特に、この角度は実質的に90°であり得る。したがって、第3部分経路及び第4部分経路の延在方向に対して垂直な方向のレーザスキャナに対する検出断面の位置を正確に決定することも可能である。したがって、第1部分経路及び第2部分経路に対して垂直な検出断面の位置の決定と共に、検出断面の位置の正確な決定が、検出断面の平面内における2つの独立した方向で可能である。
【0014】
例示的な実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路はそれぞれ、相互に平行に又は/且つ相互に一定の距離だけ離れて延在する。他の実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路はそれぞれ、直線に沿って延在する。
【0015】
さらに他の例示的な実施形態によれば、第1部分経路及び第2部分経路及び/又は第3部分経路及び第4部分経路は逆方向に走査される。これにより、2つの部分経路それぞれをその後繰り返し走査することが可能となる。
【0016】
さらに他の実施形態によれば、検出断面は、加工すべき対象物を取り付けるための対象物ホルダに設けられ、本方法は、レーザスキャナに対する検出断面の位置に基づきレーザスキャナの座標系と対象物ホルダの座標系との間の座標変換を求めるステップも含む。すると、これにより、レーザビームをレーザスキャナにより対象物ホルダ又はそれに取り付けた対象物の任意の所望の場所へ指向させることが可能となる。本明細書中の実施形態によれば、本方法は、レーザスキャナにより対象物の所望の場所へ指向させたレーザビームで対象物を加工するステップも含む。レーザビームは、この場合、レーザスキャナに対する検出断面の位置を定めるために用いるのと同じレーザビームとすることができ、又はこれとは異なる対象物の加工用のレーザビームであり、同じくレーザスキャナにより制御され、レーザスキャナに対する検出断面の位置を定めるのに用いるレーザビームと既知の関係にあるビーム経路を有するレーザビームであってもよい。対象物の加工は、特に、対象物の材料特性の変更及び対象物からの材料の除去であり得る。
【0017】
例示的な実施形態によれば、この場合、対象物ホルダに複数の検出断面、例えば3つの検出断面等を設け、レーザスキャナに対する複数の検出断面それぞれの位置を決定し、且つ複数の検出断面の具体的な位置に基づき座標変換を求めることが可能である。したがって、適切な座標変換を高精度で定めることが可能である。複数の検出断面の位置は、単一の検出断面について上述したのと同様にそれぞれ定められる。
【0018】
実施形態によれば、上述の方法を実行するよう構成された、レーザスキャナを含む加工システムも提供される。
【0019】
他の実施形態によれば、加工システムは、レーザスキャナと、所定の検出断面に入射するレーザ光用の検出器と、レーザスキャナを制御し且つ検出器から検出信号を受け取るコントローラとを備え、コントローラは、走査経路に沿ってレーザビームを走査するようにレーザスキャナを制御するよう構成され、走査経路は、検出断面を含む平面内に第1部分経路及び第2部分経路を含み、第1部分経路及び第2部分経路は、検出断面を含む平面内の検出断面の直径とレーザビームの直径とを足したものよりも短い距離であり、また検出断面を含む平面内のレーザビームの直径の0.3倍よりも大きく且つ/又は検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、並んで延在し、コントローラは、第1部分経路に沿った走査時に検出断面に入射するレーザ光により生じる検出された第1光強度を、第2部分経路に沿った走査時に検出断面に入射するレーザ光により生じる検出された第2光強度と比較するよう構成された制御モジュールを含む。
【0020】
本明細書中の特定の実施形態によれば、加工システムは、少なくとも1つの粒子ビームカラムも含み、これは粒子ビームカラムに対する1つ又は複数の検出断面の位置を検出するよう構成される。少なくとも1つの粒子ビームカラムは、対象物の顕微鏡像を得るか、対象物に材料を堆積するか、又は対象物から材料を除去するよう構成することもできる。
【0021】
本発明の上記の又は他の有利な特徴は、添付図面を参照した以下の例示的な実施形態の詳細な説明からより明確となるであろう。可能な実施形態の全てが本明細書中に示す利点のそれぞれ又はいずれかを必ずしも示すとは限らないことに留意されたい。
【図面の簡単な説明】
【0022】
【図1】レーザ加工システムの概略図である。
【図2】図1に示すレーザ加工システムで用いることができる対象物ホルダの断面の概略図である。
【図3a】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図3b】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図3c】走査経路の変位、検出断面に入射する光強度、及び検出された光強度の1段階を示す。
【図4】可能な走査経路のさらに別の概略図である。
【図5】加工システムのコントローラの一部の概略図である。
【図6】加工システムのさらに別のコントローラの一部の概略図である。
【発明を実施するための形態】
【0023】
以下で説明する例示的な実施形態において、機能及び構造が同様のコンポーネントは可能な限り同様の参照符号で示す。したがって、特定の実施形態の個々のコンポーネントの特徴を理解するには、他の実施形態及び発明の概要の説明を参照されたい。
【0024】
図1は、加工システム1の概略図である。この加工システムは、レーザビーム及び複数の粒子ビームで対象物の加工を実行するよう構成される。このようなシステムに関する背景情報は、例えば、米国特許出願公開第2011/0198326号明細書で見ることができ、当該出願の全開示を参照により本特許出願に援用する。
【0025】
加工システム1は、2つの粒子ビームカラム、すなわち電子ビーム5を発生させる電子ビームカラム3及びイオンビーム9を発生させるイオンビームカラム7を含み、イオンビーム9は、電子ビーム5のように加工領域11内の場所へ指向させる。
【0026】
電子ビームカラム3は、電子ビーム5を加工領域11内に配置した対象物へ指向させるよう働き、また相互作用粒子、例えば二次電子、後方散乱電子、若しくは透過電子、及び/又はX線若しくはカソードルミネッセンス光(cathodoluminescence radiation)等の相互作用放射線を検出するよう働く。電子ビームを対象物上の種々の場所へ指向させ、検出された強度をそれらの場所に関連付ければ、対象物の一部の電子顕微鏡像を求めることができる。このような電子顕微鏡像に基づき、さらなる加工を必要とする対象物上の加工場所を決定することが可能である。さらなる加工は、加工場所における材料の堆積又は加工場所からの材料の除去を含み得る。
【0027】
イオンビームカラム7を用いて、イオンビーム9をこのような加工場所へ指向させる。イオンビーム9は、対象物加工場所における材料を除去することができ、表面上への材料の堆積を誘発することもできる。この目的で、イオンビームにより活性化されるプロセスガスを加工場所に供給すること、及び対象物から材料を除去するか又は対象物に材料を堆積することが可能である。イオンビームは、電子ビームと同様に、対象物の像の生成に用いることもできる。
【0028】
イオンビーム9による対象物からの材料の除去は、限定された速度でしか可能でない。イオンビームにより施される除去速度では時間がかかりすぎるような材料除去が望まれる場合、材料除去をレーザビームにより行うことができる。これを行うために、レーザスキャナ74が発するレーザビーム17の走査領域13に対象物を搬送して、レーザビームを用いて対象物から材料を除去する。レーザビームによる材料除去の速度は、イオンビームによる速度よりも速い。したがって、比較的速い材料除去速度がレーザビームで得られる。
【0029】
電子ビームカラム3は、カソード23及びアノード25を含む電子源21と、ビーム5を発生させるコンデンサレンズ系27と、例えばカラム3内に配置される二次電子検出器29と、電子ビーム5を加工領域11内に集束させる対物レンズ31とを備える。ビームデフレクタ33を設けて、対象物への電子ビーム5の入射場所を変え、例えば対象物の表面の加工領域を走査し、且つ二次電子等の生成又は放出された粒子を検出器29で検出することで、走査した加工領域11における対象物の電子顕微鏡像を得るようにする。
【0030】
イオンビームカラム7は、イオン源39と、イオンビーム9を形成及び加速する電極41と、ビームデフレクタ43と、集束コイル若しくは集束電極45とを備えることで、イオンビーム9を加工領域11内に集束させて対象物の一領域にわたって走査するようにする。
【0031】
真空空間51が真空室壁53により画定されており、真空室壁53は、真空ポンプに接続したポンプポート55を有し、ポート57を介して換気される。プロセスガスを真空室51に導入した場合でも電子源21を十分な真空下で永久に維持するために、電子カラム3は、開口59及びさらに別のポンプポート61を備えることで、電子源21を含む真空部分を別個の真空ポンプにより排気するようにする。
【0032】
試料の加工に複数の粒子ビームを用いるシステムに関する背景情報は、米国特許出願公開第2005/0184251号明細書、米国特許第6,855,938号明細書、及び独国特許第10 2006 059 162号明細書から得ることができ、上記公報の全開示を参照により本願に援用する。
【0033】
レーザシステム15は、レーザビーム17を整形及び集束するためにレーザ71及びレンズ73を含む。レーザビーム17を、1つ又は複数のミラー又は光ファイバライトガイドを介して真空空間83の真空室壁53付近の場所へ指向させ、そこで2つの走査ミラー75、77を含むレーザスキャナ74に入射させ、走査ミラー75、77を、矢印79で示すようにアクチュエータ76又は78により枢動させることができる。アクチュエータ76、78によるミラー75、77の枢動は、相互に対して角度をなした向きの、特に相互に直交する方向に行われるので、レーザビーム17は、2つのミラー75及び77での反射後に2つの独立した方向に偏向されて走査領域13を走査することができる。
【0034】
図示の例では、レーザスキャナ74は、それぞれが1方向に枢動できる2つの走査ミラーを備える。他の例では、レーザスキャナは、2つの独立した方向に枢動できる1つの走査ミラーのみを備える。レーザスキャナの他の変形形態も考えられる。
【0035】
アクチュエータ76及び78は、より詳細に後述するようにコントローラ80により制御される。
【0036】
レーザビーム17は、真空室壁53により同じく画定された真空空間83に窓81を通して入る。真空空間83は、ドア85により真空空間51から隔てることができる。図1は、ドア85の板87について、ドアの開放位置の状態を実線で、ドア85の閉鎖位置の状態を破線で示す。ドアのアクチュエータロッド89を用いて、板87を変位させ、ドア85をその開放位置からその閉鎖位置へ、またその逆へ移動させる。ドア85は、真空空間51及び83内で異なる真空圧を維持するために、室壁53から封鎖することにより真空クロージャとして実施することができる。この場合、真空室83は、真空ポンプに接続したポンプポート91を介して排気させ、さらに別のポート93を介して換気させることができる。
【0037】
加工すべき対象物は、対象物ホルダ101に取り付け、対象物ホルダ101と共に2つの位置間で往復搬送させることができる。この目的で、連結器108を一端に有するロッド105を備える搬送アセンブリ103を設け、連結器108で対象物ホルダ101を保持することで、対象物を粒子ビーム5及び9の加工領域11に配置する図1の右側位置から、対象物をレーザビーム17の加工領域13内に配置する図1の左側位置へ、対象物ホルダを引き込むことができる。同様に、対象物ホルダ101は、搬送アセンブリ103により図1の左側位置から図1の右側位置へ搬送することができる。搬送アセンブリ103は、この目的で、真空室壁53に設けられてロッド105を貫通させる真空シール107も含み、これは、真空空間51及び83を換気する必要なく、ロッド105の変位による対象物ホルダ101の2つの位置間での搬送を可能にする。対象物ホルダ101の搬送中にこれを支持するために、レール109を設けることができる。対象物ホルダ101が図1の右側位置で真空空間51内に配置されている場合、ロッド105の連結器108を対象物ホルダ101から解放することができるので、ロッド105を真空室51から除去してドア85を閉鎖することができる。
【0038】
対象物ホルダ101が真空空間51内に配置されている場合、対象物ホルダ101は位置決め装置111により支持され、位置決め装置111を用いて、対象物ホルダ101を粒子ビーム5及び9に対して変位させることで、ビームを選択可能な方向から対象物ホルダ101の選択可能な場所へ指向させることができる。この目的で、位置決め装置111は、ベース113と、対象物ホルダ101が固定されるコンポーネント117を担持する1つ又は複数の中間コンポーネント115とを備える。コンポーネント113、115、及び117を相互に対して移動させて、3次元x、y、及びzでの対象物ホルダ101の変位を可能にすることができ、コンポーネントは、粒子ビーム5及び9に対する対象物ホルダ101の向きを変えるために相互に対して回転可能でもあり得る。
【0039】
図1の左側位置における真空空間83内では、対象物ホルダ101を位置決め装置121上に配置し、位置決め装置121は、レーザスキャナ15の加工領域13における対象物ホルダ101の位置決めを可能にする。
【0040】
レーザビーム加工を粒子ビーム検査又は粒子ビーム加工と組み合わせることができる加工システムのさらに他の実施形態は、米国特許出願公開第2010/0051828号明細書に記載されており、その全開示を参照により本明細書に援用する。
【0041】
図2は、図1の左側位置における対象物ホルダ101の概略断面図を示す。対象物ホルダ101は、対象物台203を取り付けたベース体201を含み、対象物台203は加工すべき対象物205を担持する。
【0042】
図示の例では、ベース体201は、3つの光検出器207を含み、図2の断面ではそのうちの2つを示す。光検出器207はそれぞれ、開口213を有する開口板211から離れて配置した光センサ209を備える。開口213は、明確に画定された検出断面を形成し、光がセンサ209により検出されるために光検出器207に入ることができる断面積を画定する。検出器207は、光センサ209の2つの接点215も備え、接点215は、ベース体201の底面で相互に離間しており(insolated)、対象物ホルダ101が位置決め装置121上に位置決めされると位置決め装置121に設けられた対応のばね接点217と接触できるようになっている。ばね接点217は、導体219を介してコントローラ80に接続されることで、センサ209の検出信号を受け取ることができる。
【0043】
画定された断面213を有する光検出器207を用いて、レーザスキャナ74と対象物ホルダ101の座標系との間の座標変換を求め、レーザビーム17を対象物205上の所望の場所へ指向できるようにする。この目的で、レーザスキャナの座標系における検出断面213の位置を決定することが必要である。この目的のための手順を、図3a、図3b、及び図3cを参照して以下で説明する。
【0044】
図3aの上段部は、検出断面213が配置される平面214と、レーザビーム17を操作する走査経路221との図を示す。走査経路221は、第1部分経路223と、第1部分経路223から距離dだけ離れて配置した第2部分経路225とを含む。第1部分経路223及び第2部分経路225を中間経路227及び228により相互に接続し、第1部分経路223、中間経路227、第2部分経路225、中間経路228、及び続いて再度第1部分経路223が、順次繰り返し走査されるようにする。2つの部分経路223及び225は、相互に逆方向に走査される。図示の例では、中間経路227は、一方の部分経路の終わりと他方の部分経路の始まりとの間の最短直線接続部である。しかしながら、中間経路が、直線形状ではなく湾曲形状等の異なる形状を有することも可能である。レーザスキャナ74の走査位置が一方の部分経路の終わりから他方の部分経路の始まりへ移行する際に、レーザビームを停止させることも可能である。
【0045】
図示の例では、第1部分経路223及び第2部分経路225は直線状である。しかしながら、部分経路は、より詳細に後述するように相互に距離dだけ離れて延びていれば、曲線(curved lines)又は円弧若しくは渦巻等の一般曲線(general curves)を辿ることもできる。
【0046】
検出断面213の平面内のレーザビーム17の直径を、図3aの上段部に円として示す。実際には、レーザビームは、図3aの中段部に示すように例えばガウシアンプロファイルである強度プロファイルを有し、図中、曲線は第1部分経路223に沿った走査中のレーザビーム231の強度プロファイルを表し、曲線233は第2部分経路225に沿った走査中のレーザビーム17の強度プロファイルの場所を表す。ここでは、第1部分経路223を最初に走査し、第2部分経路225を第1部分経路の後に走査して、第2強度プロファイル233が時間軸tに沿って第1強度プロファイル231よりも後に生じるようにすると考える。
【0047】
図3aの下段部において、曲線235は、コントローラ80が検出し、且つ検出断面213を有する開口板211の下流に配置した光センサ209が発生させる強度信号を表す。強度信号は、第1部分経路223に沿った走査中にレーザビームプロファイル213により発生する。第1部分経路223は、図3aに示す例では検出断面213の中心239と一致し、信号235は最大強度を有する。
【0048】
図3aの下段部における曲線237は、第2部分経路225に沿ったレーザビーム17の走査中にビームプロファイル233により発生する検出信号を表す。第2部分経路225は第1部分経路223から離れて配置されるので、第2部分経路225は検出断面の中心239と一致しないことで、検出断面213を通過して光センサ209に達するレーザ光の強度が低くなり得る。したがって、信号237は、信号235よりも低い強度を有する。図示の例では、第1部分経路223を第2部分経路225の前に走査するので、信号237は信号235に対して時間(t)だけ遅れる。
【0049】
レーザスキャナに対する検出断面213の位置を定めるために、続いて、第1部分経路223をその延在方向を横断する方向にいくらか変位させ、信号235の強度を解析することが可能となる。信号の強度が最大となる変位のためには、第1部分経路223が検出断面213のちょうど中心を通過して、検出断面213の中心の位置を第1部分経路223の延在方向に対して垂直な方向で決定し、部分経路223の延在方向に対して垂直な走査偏向と一致させることができるようにする。しかしながら、信号235の強度は、部分経路223の位置の変動に伴い僅かにしか変わらないので、このように、レーザスキャナ74に対する検出断面213の位置は、比較的低い精度でしか決定することができない。
【0050】
図示の例では、位置の決定は、部分経路223及び225を繰り返し走査することにより行われ、その際、両部分経路223及び225の場所を方向241に連続的に変位させる。図3b及び図3cの上段部は、この連続変位の2つの例を示す。図3bの上段部では、検出断面213は2つの部分経路223及び225間の中央にあり、図3bの下段部に示すように、2つのビームプロファイル231及び233から等しい強度の検出信号235又は237が得られるようになっている。図3cでは、変位をさらに大きくして、第2部分経路225が検出断面213の中心239と一致するようにする。したがって、図3cの下段部に示すように、第2部分経路225の走査中に発生する検出信号237は、第1部分経路223の走査中に発生する検出信号235よりも大きい。
【0051】
図示の例では、2つの部分経路223及び225の延在方向を横断する方向の検出断面213の位置の決定は、2つの部分経路223及び225を含む走査経路を変位させて、2つの検出信号235及び237が同じ強度を有するか又はこれら2つの強度間の差が最小若しくはゼロに等しくなるようにするよう行われる。これには、部分経路の変位が軽微であっても2つの検出信号235及び237間の差が比較的大きくなるので、検出断面の位置を高精度で検出できるという利点がある。レーザスキャナの座標系における検出断面213の中心239の位置は、このとき、部分経路223、225の延在方向を横断する方向の走査偏向間の中心点に対応する。
【0052】
この目的で、2つの部分経路223及び225を相互に離間して位置付ける必要があり、その際の距離は、レーザビーム17の光が第1部分経路223に沿った走査時及び第2部分経路225に沿った走査時に検出断面213に入射するよう選択する。したがって、2つの部分経路223、225間の距離dは、検出断面213の直径に基づき決定される値とレーザビーム17の直径に基づき決定される値とを足したものよりも小さくすべきである。検出断面213の直径に基づき決定される値は、例えば、検出断面213自体の直径と同じ大きさであるよう選択することができ、又は検出断面213の直径の0.9倍若しくは0.8倍等、僅かに小さくすることができる。同様に、レーザビーム17の直径に基づき決定される値は、例えば、検出断面自体の平面内のレーザビーム17の直径と同じ大きさであるよう選択することができ、又は検出断面の平面内のレーザビーム17の直径の0.9倍若しくは0.8倍等、僅かに小さくすることができる。
【0053】
レーザビーム17の直径は、従来の方法により定めることができる。例えば、ガウス断面(Gaussian cross-section)又は同様のビーム断面では、ビームの直径を、例えばビーム強度の90%が直径内にあり、ビーム強度の10%が直径外にあるよう定めることができる。
【0054】
また、部分経路223及び225が方向241に移動する際に2つの信号235及び237の強度間の差が著しく変わるように、2つの部分経路223及び225間の距離dが小さすぎないようにすべきである。例えば、距離dは、レーザビームの直径の0.3倍、0.4倍、又は0.4倍よりも大きくすべきであり、且つ/又は検出断面の直径の0.3倍、0.4倍、又は0.5倍よりも大きくすべきである。
【0055】
図3a〜図3cに基づき説明した方法では、検出断面213の位置を一方向で、すなわち部分経路223及び225の延在方向に直交する方向で、正確に検出することができる。
【0056】
図4は、検出断面213の位置を2つの独立した方向で検出することができる実施形態を示す。
【0057】
この実施形態では、最初に、図3a〜図3cを参照して上述したように、部分経路223及び225の延在方向を横断する方向で位置を決定する。続いて、第3部分経路223’及び第4部分経路225’を繰り返し走査することにより走査経路を変更するが、その際、第3部分経路223’及び第4部分経路225’を、第1部分経路223及び第2部分経路225に対して90°の角度に向ける。部分経路223’及び225’の位置を、2つの検出された信号がほぼ等しくなるまで、又はこれら2つの信号間の差が最小又はゼロに等しくなるまで、方向241’に変える。したがって、検出断面213の中心の位置は、方向241及び目的方向241’の両方で正確に定められる。
【0058】
図5は、上述した検出信号の解析を実行するためのコントローラ80の一部の概略図である。光センサ209の検出信号は、導体219を介してコントローラ80へ伝送される。信号は、演算増幅器241及び抵抗243を備える電流電圧変換器により変換され、アナログデジタル変換器245によりデジタル信号にさらに変換される。アナログデジタル変換器245により出力されたデジタル信号は、マイクロプロセッサ247により解析され、マイクロプロセッサ247は、検出された信号の発生時間及び強度を判定することにより判定された強度を相互に比較するよう構成される。マイクロプロセッサ247は、2つの時間的に連続した信号をそれらの強度に関して比較し、強度の差を求める。この差は、PIコントローラ249へ出力され、PIコントローラ249はさらに、走査経路の変位のための制御信号を出力265において供給する。走査経路を発生させて、レーザビーム17を走査経路に沿って指向させるようレーザスキャナ74のアクチュエータ76、78を制御するコントローラ80のさらに別のコンポーネントが、出力265において供給された信号265を読み取り、この信号に応じて走査経路を変位させる。
【0059】
したがって、図5に概略的に示す回路では、第1部分経路223に沿った走査時及び第2部分経路225に沿った走査時に発生する2つの検出信号が同じ強度を有するまで、走査経路を変位させることが可能である。
【0060】
図6は、図5に示すコントローラの部分の代替的な実施形態を示す。この実施形態では、センサ209が発生させた信号が、演算増幅器241及び抵抗を備える電流電圧変換器を用いてこの場合も変換される。しかしながら、変換された信号は、マルチプレクサ251を介してフィードバック抵抗254を有する第1演算増幅器253とフィードバック抵抗256を有する第2演算増幅器255とに交互に供給され、第1演算増幅器253は第1部分経路223に沿った走査時に発生する信号を常に受け取り、第2演算増幅器255は第2部分経路225に沿った走査時に発生する信号を常に受け取るようになっている。マルチプレクサ251は、同期入力又はリセット入力252を含み、これを介して第1部分経路223の各横断の開始時にリセットされる。
【0061】
演算増幅器253、255の出力は、ラッチメモリ259及び261にそれぞれ接続され、ラッチメモリ259及び261は、増幅信号の最大値を記憶してその最大値を後続の比較器263へ供給する。したがって、比較器の出力265において供給される信号は、第1部分経路及び第2部分経路それぞれの横断中に検出された光強度の差を表す。ラッチメモリ259及び261はそれぞれ、リセット入力260又は262を有するので、第1走査経路及び第2走査経路の各横断前にマルチプレクサ251と共にリセットすることができる。
【0062】
本発明をその特定の例示的な実施形態に関して説明したが、多くの代替形態、変更形態、及び変形形態が当業者には明らかとなるであろう。したがって、本明細書に記載した本発明の例示的な実施形態は、説明を意図したものであり、決して限定を意図したものではない。添付の特許請求の範囲に記載される本発明の趣旨及び範囲から逸脱せずに、様々な変更を加えることができる。
【特許請求の範囲】
【請求項1】
レーザスキャナを操作する方法であって、
前記レーザスキャナを用いて走査経路に沿ってレーザビームを走査し、検出断面に入射する前記レーザビームのレーザ光により生じる光強度を検出するステップと、
前記検出された光強度に基づき前記レーザスキャナに対する前記検出断面の位置を決定するステップと
を含み、前記走査経路は、前記検出断面を含む平面内に第1部分経路及び第2部分経路を含み、前記第1部分経路及び前記第2部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在する方法。
【請求項2】
請求項1に記載の方法において、前記第1部分経路に沿った走査中に前記検出断面に入射するレーザ光により生じる検出された第1光強度と、前記第2部分経路に沿った走査中に前記検出断面に入射するレーザ光により生じる検出された第2光強度とを比較するステップをさらに含む方法。
【請求項3】
請求項2に記載の方法において、前記検出された第1光強度及び前記検出された第2光強度が実質的に等しくなるまで前記第1部分経路及び前記第2部分経路を変位させることにより、前記走査経路を繰り返し変更するステップをさらに含む方法。
【請求項4】
請求項3に記載の方法において、前記レーザスキャナに対する前記検出断面の位置は、前記第1部分経路と前記第2部分経路との間の中央に位置決めされるよう決定される方法。
【請求項5】
請求項1〜4のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部分経路は、相互に一定の距離だけ離れて延在する方法。
【請求項6】
請求項1〜5のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部分経路は、それぞれ直線に沿って延在する方法。
【請求項7】
請求項1〜6のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部部経路は、逆方向に走査される方法。
【請求項8】
請求項1〜7のいずれか1項に記載の方法において、前記走査経路は、前記検出断面を含む平面内に第3部分経路及び第4部分経路を含み、前記第3部分経路及び前記第4部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて延在し、
前記第1経路と前記第3部分経路との間の最小角度は、30°よりも大きい、特に50°よりも大きい、特に70°よりも大きい方法。
【請求項9】
請求項1〜8のいずれか1項に記載の方法において、前記検出断面は、対象物ホルダに設けられ、前記方法は、前記レーザスキャナに対する前記検出断面の決定された位置に基づき前記レーザスキャナの座標系と前記対象物ホルダの座標系との間の座標変換を求めるステップをさらに含む方法。
【請求項10】
請求項9に記載の方法において、2つ以上の検出断面が前記対象物ホルダに設けられ、前記レーザスキャナに対する前記2つ以上の検出断面の位置は、前記検出された光強度に基づき決定され、前記座標変換は、前記レーザスキャナに対する前記2つ以上の検出断面の位置に基づき求められる方法。
【請求項11】
請求項9又は10に記載の方法において、前記対象物ホルダに取り付けられた対象物を前記レーザスキャナが発生させるレーザビームで加工するステップをさらに含む方法。
【請求項12】
請求項1〜11のいずれか1項に記載の方法を実行するよう構成された、レーザスキャナ及びコントローラを備える加工システム。
【請求項13】
特に請求項12に記載の加工システムにおいて、
レーザスキャナと、
所定の検出断面に入射するレーザ光を検出するよう構成された検出器と、
前記レーザスキャナを制御し且つ前記検出器から検出信号を受け取るよう構成されたコントローラと
を備え、前記コントローラは、走査経路に沿って前記レーザビームを走査するように前記レーザスキャナを制御するよう構成され、前記走査経路は、前記検出断面を含む平面内に第1部分経路及び第2部分経路を含み、前記第1部分経路及び前記第2部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在し、
前記コントローラは、前記第1部分経路に沿った走査時に前記検出断面に入射する前記レーザ光により生じる検出された第1光強度を、前記第2部分経路に沿った走査時に前記検出断面に入射する前記レーザ光により生じる検出された第2光強度と比較するよう構成された制御モジュールを含む加工システム。
【請求項14】
請求項13に記載の加工システムにおいて、前記制御モジュールは、前記第1光強度と前記第2光強度との間の差を表す信号を発生するよう構成される加工システム。
【請求項15】
請求項14に記載の加工システムにおいて、前記コントローラは、前記差が最小になるまで前記第1部分経路及び前記第2部分経路を変位させるように前記レーザスキャナを制御するよう構成される加工システム。
【請求項16】
請求項12〜15のいずれか1項に記載の加工システムにおいて、少なくとも1つの粒子ビームカラムをさらに備え、該粒子ビームカラムは、該粒子ビームカラムに対する前記検出断面の位置を検出するよう構成される加工システム。
【請求項17】
請求項16に記載の加工システムにおいて、該加工システムは、前記少なくとも1つの粒子ビームカラムを用いて、対象物に材料を堆積するか又は該対象物から材料を除去するよう構成される加工システム。
【請求項1】
レーザスキャナを操作する方法であって、
前記レーザスキャナを用いて走査経路に沿ってレーザビームを走査し、検出断面に入射する前記レーザビームのレーザ光により生じる光強度を検出するステップと、
前記検出された光強度に基づき前記レーザスキャナに対する前記検出断面の位置を決定するステップと
を含み、前記走査経路は、前記検出断面を含む平面内に第1部分経路及び第2部分経路を含み、前記第1部分経路及び前記第2部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在する方法。
【請求項2】
請求項1に記載の方法において、前記第1部分経路に沿った走査中に前記検出断面に入射するレーザ光により生じる検出された第1光強度と、前記第2部分経路に沿った走査中に前記検出断面に入射するレーザ光により生じる検出された第2光強度とを比較するステップをさらに含む方法。
【請求項3】
請求項2に記載の方法において、前記検出された第1光強度及び前記検出された第2光強度が実質的に等しくなるまで前記第1部分経路及び前記第2部分経路を変位させることにより、前記走査経路を繰り返し変更するステップをさらに含む方法。
【請求項4】
請求項3に記載の方法において、前記レーザスキャナに対する前記検出断面の位置は、前記第1部分経路と前記第2部分経路との間の中央に位置決めされるよう決定される方法。
【請求項5】
請求項1〜4のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部分経路は、相互に一定の距離だけ離れて延在する方法。
【請求項6】
請求項1〜5のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部分経路は、それぞれ直線に沿って延在する方法。
【請求項7】
請求項1〜6のいずれか1項に記載の方法において、前記第1部分経路及び前記第2部部経路は、逆方向に走査される方法。
【請求項8】
請求項1〜7のいずれか1項に記載の方法において、前記走査経路は、前記検出断面を含む平面内に第3部分経路及び第4部分経路を含み、前記第3部分経路及び前記第4部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて延在し、
前記第1経路と前記第3部分経路との間の最小角度は、30°よりも大きい、特に50°よりも大きい、特に70°よりも大きい方法。
【請求項9】
請求項1〜8のいずれか1項に記載の方法において、前記検出断面は、対象物ホルダに設けられ、前記方法は、前記レーザスキャナに対する前記検出断面の決定された位置に基づき前記レーザスキャナの座標系と前記対象物ホルダの座標系との間の座標変換を求めるステップをさらに含む方法。
【請求項10】
請求項9に記載の方法において、2つ以上の検出断面が前記対象物ホルダに設けられ、前記レーザスキャナに対する前記2つ以上の検出断面の位置は、前記検出された光強度に基づき決定され、前記座標変換は、前記レーザスキャナに対する前記2つ以上の検出断面の位置に基づき求められる方法。
【請求項11】
請求項9又は10に記載の方法において、前記対象物ホルダに取り付けられた対象物を前記レーザスキャナが発生させるレーザビームで加工するステップをさらに含む方法。
【請求項12】
請求項1〜11のいずれか1項に記載の方法を実行するよう構成された、レーザスキャナ及びコントローラを備える加工システム。
【請求項13】
特に請求項12に記載の加工システムにおいて、
レーザスキャナと、
所定の検出断面に入射するレーザ光を検出するよう構成された検出器と、
前記レーザスキャナを制御し且つ前記検出器から検出信号を受け取るよう構成されたコントローラと
を備え、前記コントローラは、走査経路に沿って前記レーザビームを走査するように前記レーザスキャナを制御するよう構成され、前記走査経路は、前記検出断面を含む平面内に第1部分経路及び第2部分経路を含み、前記第1部分経路及び前記第2部分経路は、前記検出断面を含む平面内の前記検出断面の直径と前記レーザビームの直径とを足したものよりも短い距離であり、また前記検出断面を含む平面内の前記レーザビームの直径の0.3倍よりも大きいか又は前記検出断面の直径の0.3倍よりも大きい距離だけ相互に離れて、相互に隣接して延在し、
前記コントローラは、前記第1部分経路に沿った走査時に前記検出断面に入射する前記レーザ光により生じる検出された第1光強度を、前記第2部分経路に沿った走査時に前記検出断面に入射する前記レーザ光により生じる検出された第2光強度と比較するよう構成された制御モジュールを含む加工システム。
【請求項14】
請求項13に記載の加工システムにおいて、前記制御モジュールは、前記第1光強度と前記第2光強度との間の差を表す信号を発生するよう構成される加工システム。
【請求項15】
請求項14に記載の加工システムにおいて、前記コントローラは、前記差が最小になるまで前記第1部分経路及び前記第2部分経路を変位させるように前記レーザスキャナを制御するよう構成される加工システム。
【請求項16】
請求項12〜15のいずれか1項に記載の加工システムにおいて、少なくとも1つの粒子ビームカラムをさらに備え、該粒子ビームカラムは、該粒子ビームカラムに対する前記検出断面の位置を検出するよう構成される加工システム。
【請求項17】
請求項16に記載の加工システムにおいて、該加工システムは、前記少なくとも1つの粒子ビームカラムを用いて、対象物に材料を堆積するか又は該対象物から材料を除去するよう構成される加工システム。
【図1】


【図2】
【図3a】
【図3b】
【図3c】
【図4】
【図5】
【図6】
【図2】
【図3a】
【図3b】
【図3c】
【図4】
【図5】
【図6】
【公開番号】特開2013−35064(P2013−35064A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−172913(P2012−172913)
【出願日】平成24年8月3日(2012.8.3)
【出願人】(512158505)カール ツァイス マイクロスコーピー ゲーエムベーハー (2)
【氏名又は名称原語表記】Carl Zeiss Microscopy GmbH
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−172913(P2012−172913)
【出願日】平成24年8月3日(2012.8.3)
【出願人】(512158505)カール ツァイス マイクロスコーピー ゲーエムベーハー (2)
【氏名又は名称原語表記】Carl Zeiss Microscopy GmbH
【Fターム(参考)】
[ Back to top ]