
レーザデータのフィルタリング方法及び装置
【課題】信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。
【解決手段】上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・を対象とし、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出する。
【解決手段】上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・を対象とし、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はレーザデータのフィルタリング方法及び装置に関するものである。
【背景技術】
【0002】
レーザデータのフィルタリング方法としては、従来、特許文献1に記載されたものが知られている。この従来例において、レーザデータは、航空機に搭載されるレーザスキャナからレーザ光を発信させ、地上で反射した波(反射光)を検知するまでの時間差によりレーザスキャナとの距離を測定された地上の所定密度の測定点群を得ることにより生成される。上記航空機はGPS及び慣性計測装置により3次元的位置及び姿勢が計測されており、上述の測定距離と組み合わせることで地上の測定点群の各々の3次元座標が算出される。
【0003】
地上が林地のときには、レーザ光は樹冠で反射したり、あるいはその一部が樹木の間を縫って地面で反射したり、さらには樹木の幹や樹木の下に生息する下草などで反射したりするため、レーザデータの測定点群の分布を垂直断面方向に示せば、季節によっては、樹冠に相当する上層で群をなすとともに、地面あるいは下草等に相当する下層、および幹等に相当する中間層において散点状に分布する。以上のレーザデータのフィルタリングは、レーザデータの中から局所的に最低標高を有する点を選別してなされる。このようにして選別された最低標高点を利用することで、地面に対応すると思われる下面層を曲面近似し、地盤高が推定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006-3332号公報(第3-4頁)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した従来例は信頼性が低いという欠点がある。
【0006】
すなわち、上述したフィルタリングは、局所的に最低標高を有するレーザデータが地表面を示すものであるという前提に基づくものであるが、レーザ光は照射位置が地表面を狙ってピンポイントに設定されているものではないため、そもそも地表面まで到達していることは保証されず、仮に局所的に最低標高を有する点であったとしても地表面ではない可能性を否定できない。この可能性は最低標高を抽出する局所的な領域を広く設定することで低くすることができ、したがって上述した前提を考慮すれば局所的な領域の広さが広くなってしまう傾向にあるが、この場合には、広く設定された領域よりも小さな地表面の起伏を無視することになってしまう。
【0007】
本発明は以上の欠点を解消すべくなされたものであって、信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。また、本発明の他の目的は信頼性の高いレーザデータのフィルタリング装置の提供にある。
【課題を解決するための手段】
【0008】
レーザデータのフィルタリングは、一般には、例えば上述した従来例のようにコンピュータによって自動でなされる1次処理を行った後、人間が地形を判読しながら経験則に基づいて修正を加える2次処理を行うというような複数段階の処理で構成される。したがって後続のフィルタリング処理の存在を考慮するならば、その前になされるフィルタリング処理においては、上述した従来例のように最終成果物である地表面を示すレーザデータの抽出を直接的に試みるよりも、反対に、地表面以外を示すレーザデータを高い信頼性で抽出し、これを除去することで間接的に地表面候補データを抽出することができる。
【0009】
本発明は以上の点を考慮した上でなされたもので、
上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・から地表面候補データ6を抽出するレーザデータのフィルタリング方法であって、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像7の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲R内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出するレーザデータのフィルタリング方法を提供することにより上述した目的を達成するものである。
【0010】
本発明によれば、レーザデータのフィルタリングは、レーザ光2とは別個の計測要素であるカメラによる撮影画像を用いて行われ、別個の計測要素の計測結果における信頼性を利用して地表面以外を示すレーザデータ5を高い確度で抽出し、これを除去することによりなされる。すなわち、カメラの撮影画像は自然地物の表面を捉えることができるために、これに基づいて生成される数値表層モデル8(DSM:Digital Surface Model)には自然地物の表面の三次元座標が反映されており、対応する三次元座標を有するレーザデータ5を除去することで自然地物を示すことが明らかなレーザデータ5を除去することができ、これにより地表面候補データ6を抽出することができる。
【0011】
自然地物である植物が繁茂する樹林地帯に対し、上空からレーザ光2を照射した場合について以下に具体的に考える。この場合には、図3(c)に示すように、一発のレーザ照射光2(照射パルス)に対し、例えば、樹冠などに反射して最初に戻ってくる反射光3A(反射パルス、特に「ファーストパルス、First pulse」とも呼ばれる)に加え、枝葉の隙間などを通過することで地表面(地表面候補)などに反射して最後に戻ってくる反射光3B(反射パルス、特に「ラストパルス、Last pulse」とも呼ばれる)、さらには、以上の樹冠と地表面との間の下草などに反射して戻ってくる反射光3C(反射パルス、「2nd pulse」や「3rd pulse」などとも呼ばれ、総括して「中間パルス」とも呼ばれる)をも取得できるときがある。すなわち、レーザ光2が枝葉の隙間や樹間などを通過することで、表層の樹冠以外に反射した反射光3をも取得することができる。これに対してカメラ撮影においては、枝葉の隙間の奥などの陰になるような部分を捉えることは難しく、このため、ほぼ表層の樹冠のみが捉えられることになる。
【0012】
したがって、カメラ撮影に基づいて数値表層モデル8を生成すると、その三次元座標は樹冠の位置、より正確には樹冠の外縁を示すものになり、これに相当する3次元座標を有するレーザデータ5を除去対象にすれば、樹冠を示すレーザデータ5、すなわち地表面以外を示すレーザデータ5を除去することができる。上述した従来例においても示す通り、反射光3の全体における樹冠に反射したものの割合は一般に高い傾向が認められることから、以上の除去により、高い割合で地表面以外を示すレーザデータ5を除去することができ、レーザデータ群5、5、・・の絞り込みを行うことができる。また、除去されたレーザデータ5は、カメラ撮影に基づいて地表面を示すものではないことが担保されているために、この後さらにフィルタリング処理を重ねて行う場合には、例えば残余のレーザデータ群5、5、・・から経験則に基づいて地表面以外と判断することができる特定のレーザデータ5の適数を削除するだけで足りる。このため、例えば従来のように過って除去されてしまった地表面候補データ6がある可能性を考慮したフィルタリング処理の検証作業が不要になり、作業効率が極めて向上する。
【0013】
以上のフィルタリング処理は、具体的には、カメラ画像に基づく数値表層モデル8の生成に関しては、ステレオマッチング処理により、また、除去対象のレーザデータ5の判定に関しては、上述したようにレーザ光2が枝葉の間を通過したものであるか否か、すなわち数値表層モデル8とレーザデータ5の標高座標値を比較することにより行うことができる。この比較に際しては、数値表層モデル8やレーザデータ5の三次元座標がある程度精密な精度を備える場合にはそもそも両者の数値としての完全な一致が望めないことは明らかであるから、誤差などを考慮した所定の許容範囲Rを設定し、数値表層モデル8の標高座標値に対してレーザデータ5の標高座標値が所定の範囲R内にあるか否かによって行うことができる。さらに、以上の数値表層モデル8を生成するためのカメラ画像7は、飛行体1にレーザ測距装置とともにカメラを搭載しておいてレーザデータ5と同時取得すれば効率的に計測作業を進めることができ、また、例えば飛行高度を異ならせてレーザデータ5とは別個に取得することでレーザデータ5との地上分解能の差を軽減させることも可能である。
【0014】
また、上記数値表層モデル8は、具体的には例えば不整三角形網(TIN:Triangulated Irregular Network)などとして構成することが可能であり、この場合、原則として座標計測点を頂点とする三角形が作り出す面によって座標計測点間の標高座標が補間されることになる。したがって全体としては補間によって標高座標が特定される領域が大部分を占め、レーザデータ5との座標比較をこの分解能に従って行うことができる反面、その比較に際しては膨大な演算処理を要することになってしまう。この点、上記数値表層モデル8に平面座標に基づくメッシュ9を設定し、各メッシュ9の中心点をメッシュ代表点10として各メッシュ8内の全ての標高座標値をメッシュ代表点10の標高座標値と一致するものと仮定した上でレーザデータ5と座標比較した場合には、演算処理を軽減することができる上に、メッシュ9の中心点を基準にすることで標高座標値にあまり大きな変化が生じにくいことから、上述したようにそもそも補間によって推定されていた標高座標値と比べて過度に位置精度が劣ってしまうということもない。この場合、具体的には、平面座標上で直交する各座標軸X、Y方向のそれぞれにおいて上記メッシュ代表点10に対してメッシュサイズaの半分以内の平面座標値を有するレーザデータ5の標高座標値をメッシュ代表点10の標高座標値と比較して演算処理することができる。
【0015】
なお、数値表層モデル8とレーザデータ5の位置精度が異なる場合には、上述したメッシュサイズaの大きさをこの違いを考慮して設定することにより、計測誤差をも軽減させることができる。
【0016】
また、以上においてはレーザ光2とは別個の計測要素であるカメラの撮影画像7を用いて生成した数値表層モデル8を用いる場合を示したが、適宜の数値表層モデル8が入手可能な場合などにおいては、このような数値表層モデル8をそのまま利用すればステレオマッチング処理などの手間を軽減することができる。この場合には、入手した数値表層モデル8がカメラの重複撮影画像7を用いて生成されていない可能性もあるが、レーザデータ群5、5、・・から地表面以外を示すレーザデータ5を抽出することの信頼性は、入手した数値表層モデル8自体の信頼性に依存するので、これを確保することにより適宜確保することができる。
【0017】
以上のレーザデータ5のフィルタリングは、
上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・から地表面候補データ6を抽出するレーザデータのフィルタリング装置であって、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7、各画像7の撮影位置および撮影方向が入力される入力部11と、
前記撮影位置および撮影方向を用いて重複撮影画像7をステレオマッチング処理して前記所定領域の三次元座標データを有する数値表層モデル8を生成するDSM生成部12と、
前記数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲R内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出するフィルタリング処理部13とを有するレーザデータのフィルタリング装置を用いることにより実現することができる。
【発明の効果】
【0018】
以上の説明から明らかなように、本発明によれば、信頼性の高いレーザデータのフィルタリング方法を提供することができ、自然地物を除いた地表面の数値モデルを効率的に生成することができる。また、信頼性の高いレーザデータのフィルタリング装置を提供することができ、自然地物を除いた地表面の数値モデルの効率的な生成設備の充実を図ることができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係るフィルタリング装置を一部に含むDTM生成装置のハードウェア構成図である。
【図2】飛行体に搭載される計測システムのハードウェア構成図である。
【図3】地上の計測状態を説明する図で、(a)はレーザ測距装置によるスキャンパターンを示す図、(b)は(a)に対応してカメラによる撮影状況を示す図、(c)は自然地物からの反射光を説明する図である。
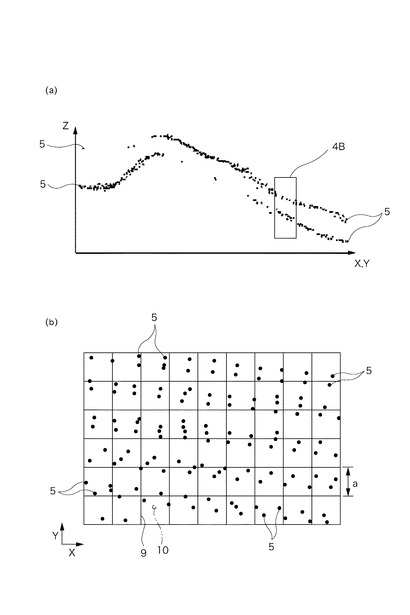
【図4】レーザデータの分布状態を説明する図で、(a)は標高方向のイメージ図、(b)は(a)の4B部分の平面方向のイメージ図であってメッシュを設定した数値表層モデルを重ねて表示したものである。
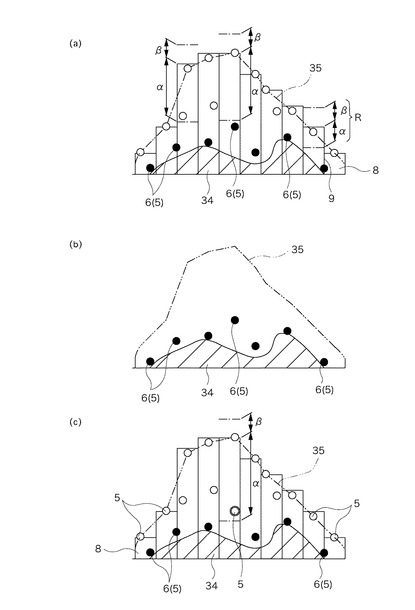
【図5】レーザデータの地形形状との相対位置関係を示す標高方向の詳細イメージ図であり、(a)はレーザデータとしてフィルタリング処理前のものを対象にしたもので、メッシュが設定された数値表層モデルを重ねて表示した図、(b)はフィルタリング処理後を示す図、(c)は変形例を(a)に対応して示す図である。
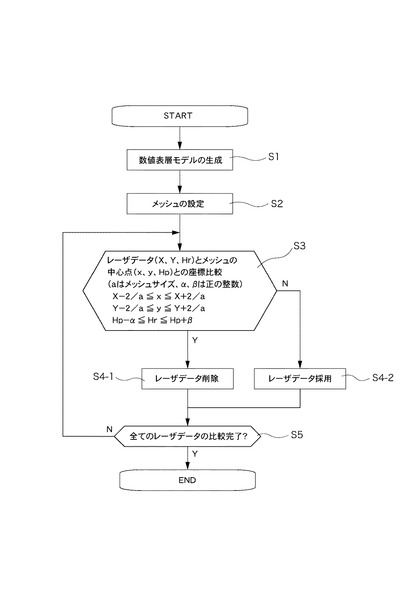
【図6】本発明に係るフィルタリング処理のフローチャートである。
【発明を実施するための形態】
【0020】
図1ないし図6に森林地帯の所定領域を対象にしたDTM(Digital Terrain Model、数値地形モデル)生成の概要を示す。図1は本発明に係るフィルタリング装置を一部に含むコンピュータからなるDTM生成装置を示すもので、自然地物である植生が密生している地域でのDTM生成のために、DTM生成装置の入力部11には、レーザ測距データ、GPS/IMUデータ、撮影画像データ、地上基準点(GCP:Ground Control Point)データが入力される。これらレーザ測距データ等は、その一部を除いて図2に示す計測システム20を搭載した航空機(飛行体)1をDTM生成対象領域としての上述した所定領域の上空で飛行しながら取得される。
【0021】
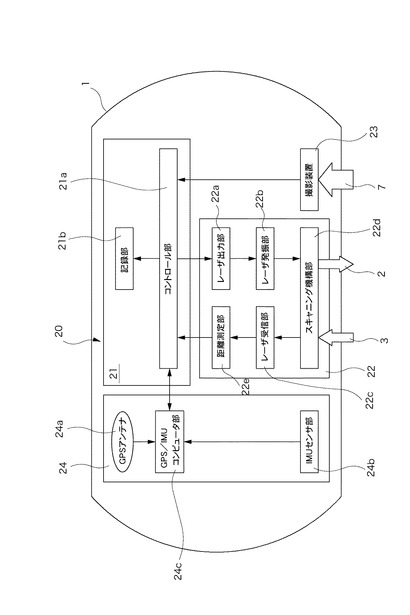
この計測システム20は、コンピュータからなるコントロールラック装置21と、レーザ測距装置22と、撮影装置23と、GPS/IMU装置24とを有する。コントロールラック装置21は、レーザ測距装置22、撮影装置23、およびGPS/IMU装置24のそれぞれを制御するコントロール部21aを備え、これらの制御対象機器を制御して取得したデータをその取得時刻に関連づけて記録部21bに記録する。
【0022】
レーザ測距装置22は、レーザ出力部22aにより出力されるレーザ媒質をレーザ発振部22bで増幅させてレーザ光2として発振させるとともに、このようにして発振されたレーザ光2の反射光3を検知するレーザ受信部22cを備える。レーザ発振部22bから発射されたレーザ光2は、スキャニング機構部22dの反復回転するミラーにより進行方向を振り分けられ、上記レーザ受信部22cはスキャニング機構部22dを介して反射光3を検知する。
【0023】
以上のレーザ光2の発射、ミラーの回転は上述したコントロール部21aにより制御され、レーザ光2の発射タイミング、発射時のミラーの角度が上述した記録部21bに記録される。また、レーザ受信部22cにより反射光3の受光が検知されると、距離データとして機能する反射光3の受光検知タイミングが距離測定部22eによって同様に記録部21bに記録される。なお、距離測定部22eによってレーザ光2の発射タイミングと反射光3の受光検知タイミングとの時間差、およびこの時間差によるレーザ発射点から反射点4までの距離を演算させ、記録部21bに上述した発射・受光検知タイミングのデータに代えて直接距離データを記録させて構成することも可能である。
【0024】
撮影装置23は、コントロール部21aによる撮影タイミング、焦点距離、撮影方位(俯角)などの制御に従って撮影を行うデジタルカメラであり、撮影により取得された撮影画像7は上述した撮影タイミング等とともに撮影画像データとして記録部21bに記録される。この撮影装置23は、1つの撮像素子(カメラ)で構成し、その撮影領域がほぼ隣接するように飛行コースを変えながら撮影する以外に、複数の撮像素子を備えて構成することも可能である。具体的には、後述する撮影状況にも示すように、例えば複数台(本実施例では5台)のカメラを互いの撮影領域がほぼ隣接するように異なる方向に向けて並べるなどして構成し、一度に広範囲の画像を取得することもできる。
【0025】
GPS/IMU装置24は、GPSによる位置情報と、IMU(Inertial Measurement Unit、慣性計測装置)による姿勢情報を取得するもので、GPS衛星からの電波を受信するGPSアンテナ24aと、加速度計とジャイロによりローリング(ω)、ピッチング(φ)、ヘディング(κ)の3方向の傾きについての角速度と加速度を計測するIMUセンサ部24bとを備える。これらGPSアンテナ24aおよびIMUセンサ部24bは、上述したコントロール部21aにより制御されるGPS/IMUコンピュータ部24cにより制御されており、所定の時間間隔で位置情報や姿勢情報が上述した記録部21bに記録される。
【0026】
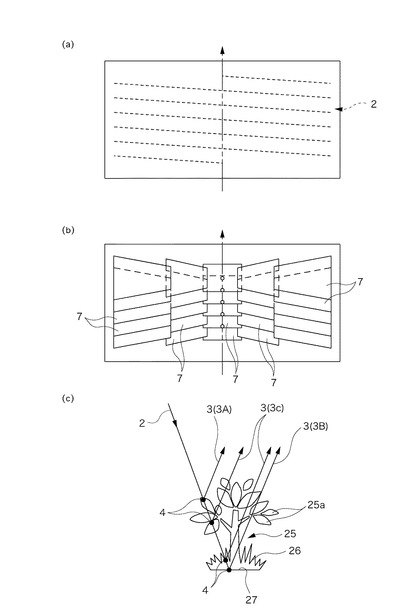
したがって航空機1をDTM生成対象領域の上空で飛行させ、レーザ光2をスキャニング機構部22dによって飛行方向に直行する方向に振り分けることにより、例えば図3(a)に示すように、レーザ光2が、DTM生成対象領域を面的に網羅するように掃射され、また、各レーザ照射光2の発射タイミング、発射時のミラーの角度、反射光3の受光検知タイミングがレーザ測距データとして記録部21bに記録される。なお、図3(a)において矢印は航空機1の飛行航路である。また、図3(a)においてはスキャニングを平行線(パラレル)状にトレースする場合を示したが、ジグザグ状や正弦波状などにトレースすることも可能である。
【0027】
さらに、DTM生成領域が森林地帯であるために、図3(c)に示すように、一発のレーザ照射光2が樹木25の葉25aや下草26、地表面27などの複数の反射点4においてそれぞれ反射する場合も生じる。この場合、レーザ受信部22cは、ファーストパルス3A、中間パルス3C、ラストパルス3Bのそれぞれを検知し、記録部21bにはこれら複数の反射光3の検知タイミングが記録される。
【0028】
また、同様に航空機1をDTM生成対象領域の上空で飛行させ、短い時間間隔で撮影装置23によって連続撮影することにより、例えば図3(b)に示すように、それぞれ飛行方向にややずれた位置で撮影されて撮影領域が飛行方向に連続する撮影画像7の複数が取得され、記録部21bに撮影画像データとして記録される。なお、図3(b)において矢印は航空機1の飛行航路、白丸は撮影地点を示す。また、飛行方向において隣接する撮影画像7間で撮影領域の一部が重複するオーバーラップが設定されることにより、同一領域が異なる撮影位置で重複して撮影される。さらに、この撮影に先立ってDTM生成対象領域には、予め測量されることによって位置座標が特定された図示しない地上基準点が設置あるいは設定され、上述した撮影画像7には地上基準点が同時に撮影される。
【0029】
なお、図3(b)は、解像度および撮影効率を考慮して、撮影領域が飛行方向に対する直行方向に長くなるように撮影装置23として5台のカメラを用いるなどし、各撮影地点で5つの撮影画像7を同時取得する場合を示しており、この場合飛行方向に対して直交方向に隣接する撮影画像同士7、7には、撮影領域の一部が重複するサイドラップが設定される。また以上の5台のカメラに代えて、単一のカメラで撮影したり、あるいは航空写真測量用の複数の撮像素子を備えたいわゆるエリアセンサやラインセンサで撮影したりすることも可能である。また、撮影装置23としてアナログカメラを用いることも可能であり、この場合には撮影した写真をスキャナで読み取ることにより撮影画像7データが生成される。
【0030】
さらに同様に、GPS/IMU装置24により、DTM生成対象領域の上空を飛行する航空機1の位置情報と姿勢情報が記録部21bに記録される。連続キネマティック法によるGPS測位を利用するこの実施の形態において、上述したGPS/IMUデータは、このようにして取得された航空機1の位置情報と姿勢情報に加え、図示しない地上の地上基地局においてGPSアンテナを用いて同時刻に取得した位置情報を加えて構成される。
【0031】
以上のようにして計測システム20や地上基準局により取得されたレーザ測距データ、GPS/IMUデータ、撮影画像データは、上述した記録部21bを構成するハードディスクや適宜の記憶媒体に記録され、DTM生成装置の入力部11は、これらのハードディスク等への接続端子などを備えて構成される。また、入力部11はインターネットへの接続回線を備え、DTM生成装置の後述する演算部が有するブラウザソフトを利用することにより、上述した地上基準点の位置座標が例えば国土地理院のウェブページからのダウンロードにより地上基準点データとして入力される。
【0032】
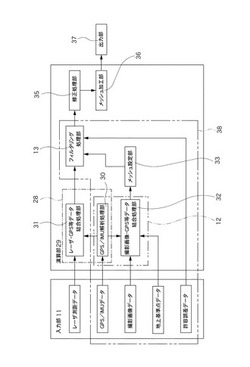
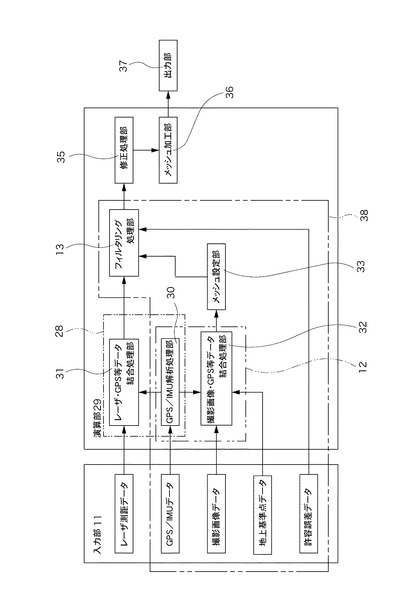
以上の各種データが入力部11から入力されるDTM生成装置は、入力データを用いて、全てのレーザ光2の反射点4の三次元座標を演算してレーザデータ群5、5、・・を生成するレーザデータ算出処理部28と、撮影領域が重複する撮影画像7を用いてDTM生成対象領域の数値表層モデル8を生成するDSM生成部12とを有する演算部29を備える。上記レーザデータ算出処理部28は、上述した航空機1の位置、姿勢を地理座標上で算出するGPS/IMU解析処理部30と、レーザ測距装置22による計測結果を用いて、DTM生成対象領域に関する三次元座標をレーザデータ5に基づいて算出するレーザ・GPS等データ結合処理部31とを有し、上記GPS/IMU解析処理部30は、DTM生成対象領域に関する三次元座標を撮影装置23による撮影画像7に基づいて算出する撮影画像・GPSデータ等結合処理部32とともにDSM生成部12を構成する。
【0033】
上記GPS/IMU解析処理部30は、例えばApplanix社のGPS/IMU解析処理ソフトウェアなどの市販のソフトウェアで構成される。具体的には、GPSアンテナ24aを介して取得した航空機GPSデータと、IMUセンサ部24bにより取得したIMUデータと、上述した地上基準点データとのそれぞれについて時間を基準にして結合させることにより、航空機1の飛行位置と飛行時の揺動を算出し、航空機1の位置と姿勢角を記録した航空機位置・姿勢角データを生成する。なお、航空機1の位置は、航空機1のGPSデータと地上基準点データを基線解析処理することにより算出することができる。
【0034】
レーザ・GPS等データ結合処理部31は、GPS/IMU解析処理部30から取得した航空機位置・姿勢角データと、入力部11から取得したレーザ測距データとにより、レーザ光2の全ての反射点4の三次元座標を演算してレーザデータ群5、5、・・を算出する。具体的には、反射点4の座標値は、レーザ光2発射時の航空機1の位置を基本にして、レーザ光2の発射方向をローリング角(ω)、ピッチング角(φ)、ヘディング角(κ)の3方向から求め、レーザ光2の発射・受光検知タイミングの時間差を利用して求めたレーザ測距装置22から反射点4までの距離を用いて算出される。ローリング(ω)方向は航空機1の傾きとレーザ測距装置22のミラー角度から、ピッチング(φ)およびヘディング(κ)方向はIMUの計測値から算出する。図4に以上のようにして生成されたレーザデータ群5、5、・・について、標高方向と平面方向のそれぞれにおいて各反射点4の座標を点で表したイメージを示す。なお、レーザ・GPS等データ結合処理部31は、以上のようにして算出されたレーザデータ群5、5、・・の三次元座標についての測地座標系から平面直角座標系への座標換算や、楕円体高から標高への変換処理を行い、また、演算部29は図示しないノイズ除去部を有し、レーザ・GPS等データ結合処理部31から出力されて後述するフィルタリング処理部13に入力される前のレーザデータ群5、5、・・からノイズ除去部によりノイズデータを除去する。
【0035】
撮影画像・GPSデータ等結合処理部32は、上記航空機位置・姿勢角データと、入力部11から入力された撮影画像データおよび地上基準点データとにより数値表層モデル8を生成する。具体的には、いわゆる写真測量であり、飛行方向に隣接することで視差を有する撮影画像同士7、7をそれぞれ撮影位置・撮影方向と、撮影重複領域に適宜設定した標定点とで相互に関連付け、地上基準点を利用して3次元座標を付与する。各撮影画像7の撮影位置、撮影方向は、撮影画像データに含まれる撮影時のカメラの俯角と航空機1位置・姿勢角データとにより演算され、これら撮影位置および撮影方向と、上述した標定点および地上基準点、さらには撮影画像データに含まれる焦点距離等を利用してステレオマッチング処理することによりステレオモデル(数値表層モデル8)が生成される。なお、上述した標定点は各撮影画像7の周縁部における特徴点を自動抽出して生成される。
【0036】
また、以上のようにして飛行方向に並ぶ撮影画像7、7、・・により生成されたステレオモデルは、上述したように飛行方向に直交する方向に配置された複数の撮影画像7のそれぞれにより生成され、これらステレオモデル同士を標定点で結合してDTM生成領域全体の数値表層モデル8が生成される。この数値表層モデル8は、撮影画像7、7間でのステレオマッチングに際して用いた同調ポイントなどを利用することにより、例えば不整三角形網として構成される。
【0037】
さらに、上述した演算部29は、以上のようにしてDSM生成部12により生成した数値表層モデル8を用いて、上述したレーザデータ群5、5、・・から地表面候補データ6を抽出するフィルタリング処理部13を有するとともに、このフィルタリング処理部13によるフィルタリング処理の前処理として数値表層モデル8にメッシュ9を設定するメッシュ設定部33を有する。メッシュ設定部33は、数値表層モデル8に平面座標に基づくメッシュ9を設定するもので、メッシュサイズaは例えば撮影画像7の単一の画素に対応する領域と同じ程度の大きさなどに設定される。また、メッシュ設定部33は、各メッシュ9の中心点をメッシュ代表点10として抽出し、このメッシュ代表点10の標高座標値を不整三角形網に基づいて演算してメッシュ9毎の標高代表値として設定する。なお、以上のメッシュ9、メッシュサイズa、メッシュ代表点10について図4の一部を利用して例示する。
【0038】
フィルタリング処理部13は、以上のようにメッシュ9単位で標高代表値が設定された数値表層モデル8とレーザデータ群5、5、・・の各レーザデータ5とをそれぞれの三次元座標により比較し、数値表層モデル8に相当する三次元座標のレーザデータ5を除去してレーザデータ群5、5、・・から地表面候補データ6を抽出する。レーザデータ5と上述したメッシュ代表点10との三次元座標値の比較は、各メッシュ代表点10の平面座標値(x、y)に対し、X、Y軸方向のそれぞれについて上述したメッシュサイズaの半分の許容範囲を設定し、この許容範囲内の平面座標値を有するレーザデータ5を抽出した上で、このレーザデータ5の標高座標値とメッシュ代表点10の標高座標値を比較してなされる。また、標高座標値同士の比較に際しては所定の許容誤差(許容範囲)Rが設定され、この許容誤差Rは、図1に示す入力部11が備えるキーボードなどから入力されたメッシュ9毎の許容誤差Rの上限側許容値βおよび下限側許容値αとして構成される。
【0039】
この実施の形態において、許容誤差Rの上限側許容値βは、レーザ計測における標高方向の誤差とカメラ撮影における標高方向の誤差とに基づき、例えば両者の集積誤差が採用される。また、下限側許容値αは、メッシュ9内に繁茂する植生の背丈を考慮して決定され、例えばこの背丈が上述した集積誤差と同じ場合にはそのまま背丈の寸法を採用し、背丈が集積誤差を超える場合には、背丈と集積誤差をさらに集積するなどして算出される。
【0040】
以上の植生の背丈は、例えば植生の種類と、その平均的な背丈とを対応づけたテーブルを演算部29に設け、このテーブルから選択して適用するようにすることが可能である。この選択に際しては、カメラ画像7に表れる色や、レーザ測距装置22により取得することが可能なレーザ光2の反射強度を参考にすることができる。
【0041】
図5は以上のフィルタリング処理部13によるレーザデータ5の除去処理を説明するもので、図においてハッチングは地形34を、2点鎖線は樹冠の外縁35を、棒グラフ状の部分はメッシュ9毎の標高座標値をその高さで表した数値表層モデル8を、黒丸及び白丸はレーザデータ5を、矢印はメッシュ9に設定された許容誤差の範囲Rを表したものである。なお、許容誤差の範囲Rは、図が煩雑にならないように一部のメッシュ9に対応するもののみを表した。図5(a)はレーザデータ5の除去処理前の状態であり、白丸は標高座標値が許容誤差R内であるレーザデータ5を、黒丸は許容誤差R外であるレーザデータ5(地表面候補データ6)を示す。また、図5(b)はレーザデータ5の除去処理後の状態である。これらの図から明らかなように、数値表層モデル8に基づいたレーザデータ5の除去処理により、地表面以外を示すレーザデータ5が高い割合で除去され、地表面候補データ6が抽出される。
【0042】
また、図5(c)は許容誤差Rの下限側許容値αをより厳密に設定した変形例を示すもので、この場合には、上述した図5(b)においては除去されなかった二重丸で示す地表面以外を示すレーザデータ5が除去される。以上の許容誤差Rの下限側許容値αの厳密な設定は、例えば植生の背丈を実測に基づいて設定することなどによりなされる。
【0043】
さらに、フィルタリング処理後のレーザデータ群5、5、・・に基づいてDTMを生成するために、演算部29は、修正処理部35とメッシュ加工部36とを備える。修正処理部35は、入力部11の図示しないマウス等を用いたオペレータからの入力操作により、フィルタリング処理後のレーザデータ群5、5、・・からさらにレーザデータ5の適数を除去する。例えば図外のモニタにレーザデータ群5、5、・・の標高方向の分布を表示し、これを観察したオペレータにより入力部11を介して除去対象のレーザデータ5の指定が入力されたときに、当該レーザデータ5を除去する。この修正処理後のレーザデータ群5、5、・・は、地表面である蓋然性が高いレーザデータ5のみで構成される。
【0044】
メッシュ加工部36は、修正処理部から出力されたレーザデータ5に基づいてDTMを生成するもので、この生成に際しては、不均一な分布状態となっているレーザデータ群5、5、・・を補間処理し、所定の密度間隔のメッシュデータに処理された上で、このメッシュデータに基づいてDTMとしての不整三角形網が生成される。補間処理は、例えば最近隣法や逆距離加重法などによって行うことが可能である。
【0045】
生成されたDTMは、図1に示すDTM生成装置の出力部37を介してモニタや適宜の記憶媒体に出力することができる。なお、図1において38は、DTM生成装置内においてレーザデータ5のフィルタリング処理を分担するフィルタリング処理装置を示すものである。
【0046】
したがって以上のDTM生成装置によるDTMの生成処理は、先ず、入力部11から入力されたレーザ測距データ、GPS/IMUデータに基づいて演算部29によりレーザデータ群5、5、・・を生成するとともに、同様に入力部11から入力された撮影画像データ、地上基準点データ、および上述したGPS/IMUデータに基づいて演算部29により数値表層モデル8を生成することによりなされる。また、このようにして生成された数値表層モデル8には、メッシュ9が設定され、各メッシュ9の中心点はメッシュ代表点10に設定される。次いで、レーザデータ群5、5、・・は、メッシュ代表点10と標高座標値を比較され、メッシュ代表点10に相当する三次元座標を有するレーザデータ5が除去されて地表面候補データ6が抽出される。この後、地表面候補データ6は、修正処理(2次フィルタリング処理)を経た上で、補間されてメッシュデータにされ、このメッシュデータによりDTMが生成される。
【0047】
また、上述したフィルタリング処理装置によるフィルタリング処理としては、図6に示すように、上述した数値表層モデル8の生成(ステップS1)、メッシュ9の設定(ステップS2)を経た後、レーザデータ5とメッシュ代表点10の標高座標値を比較(ステップS3)する。この比較は、具体的には図6に示す数式に基づいて行われ、この後、比較されたレーザデータ5の除去(ステップS4-1)、あるいは採用(ステップS4-2)が判定される。以上の比較・判定処理は全てのレーザデータ5に対してなされるまで繰り返され(ステップS5)、これによって地表面候補データ6のみが抽出されてフィルタリング処理が終了する。なお、このフィルタリング処理は、以上のコンピュータの実行手順が記載されたコンピュータプログラムによって構成することができる。
【0048】
なお、上述した実施の形態においては、2次フィルタリング処理としてオペレータの判断に基づくマニュアル処理を行う場合を示したが、適当なフィルタリングのパラメータが設定可能な場合には、コンピュータプログラムによる自動処理として構成することも可能である。また同様に、レーザデータ5が森林地帯に対象にして取得される場合を示したが、一部に植生が含まれるような地域を対象にすることも可能であり、この場合には必要に応じて例えば、取得される植生域のみの地表面候補データ6を他の適宜の地表面候補データと組み合わせるなどしてより広い領域の地表面候補データを生成できるようにすることなども可能である。
【符号の説明】
【0049】
1 飛行体
2 レーザ光
2A 単一のレーザ照射光
3 反射光
4 反射点
5 レーザデータ
6 地表面候補データ
7 撮影画像
8 数値表層モデル
9 メッシュ
10 メッシュ代表点
11 入力部
12 DSM生成部
13 フィルタリング処理部
R 許容誤差(許容範囲)
X、Y 平面座標上で直交する各座標軸
a メッシュサイズ
【技術分野】
【0001】
本発明はレーザデータのフィルタリング方法及び装置に関するものである。
【背景技術】
【0002】
レーザデータのフィルタリング方法としては、従来、特許文献1に記載されたものが知られている。この従来例において、レーザデータは、航空機に搭載されるレーザスキャナからレーザ光を発信させ、地上で反射した波(反射光)を検知するまでの時間差によりレーザスキャナとの距離を測定された地上の所定密度の測定点群を得ることにより生成される。上記航空機はGPS及び慣性計測装置により3次元的位置及び姿勢が計測されており、上述の測定距離と組み合わせることで地上の測定点群の各々の3次元座標が算出される。
【0003】
地上が林地のときには、レーザ光は樹冠で反射したり、あるいはその一部が樹木の間を縫って地面で反射したり、さらには樹木の幹や樹木の下に生息する下草などで反射したりするため、レーザデータの測定点群の分布を垂直断面方向に示せば、季節によっては、樹冠に相当する上層で群をなすとともに、地面あるいは下草等に相当する下層、および幹等に相当する中間層において散点状に分布する。以上のレーザデータのフィルタリングは、レーザデータの中から局所的に最低標高を有する点を選別してなされる。このようにして選別された最低標高点を利用することで、地面に対応すると思われる下面層を曲面近似し、地盤高が推定される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006-3332号公報(第3-4頁)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した従来例は信頼性が低いという欠点がある。
【0006】
すなわち、上述したフィルタリングは、局所的に最低標高を有するレーザデータが地表面を示すものであるという前提に基づくものであるが、レーザ光は照射位置が地表面を狙ってピンポイントに設定されているものではないため、そもそも地表面まで到達していることは保証されず、仮に局所的に最低標高を有する点であったとしても地表面ではない可能性を否定できない。この可能性は最低標高を抽出する局所的な領域を広く設定することで低くすることができ、したがって上述した前提を考慮すれば局所的な領域の広さが広くなってしまう傾向にあるが、この場合には、広く設定された領域よりも小さな地表面の起伏を無視することになってしまう。
【0007】
本発明は以上の欠点を解消すべくなされたものであって、信頼性の高いレーザデータのフィルタリング方法の提供を目的とする。また、本発明の他の目的は信頼性の高いレーザデータのフィルタリング装置の提供にある。
【課題を解決するための手段】
【0008】
レーザデータのフィルタリングは、一般には、例えば上述した従来例のようにコンピュータによって自動でなされる1次処理を行った後、人間が地形を判読しながら経験則に基づいて修正を加える2次処理を行うというような複数段階の処理で構成される。したがって後続のフィルタリング処理の存在を考慮するならば、その前になされるフィルタリング処理においては、上述した従来例のように最終成果物である地表面を示すレーザデータの抽出を直接的に試みるよりも、反対に、地表面以外を示すレーザデータを高い信頼性で抽出し、これを除去することで間接的に地表面候補データを抽出することができる。
【0009】
本発明は以上の点を考慮した上でなされたもので、
上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・から地表面候補データ6を抽出するレーザデータのフィルタリング方法であって、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7と、各画像7の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデル8を生成し、
次いで、該数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲R内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出するレーザデータのフィルタリング方法を提供することにより上述した目的を達成するものである。
【0010】
本発明によれば、レーザデータのフィルタリングは、レーザ光2とは別個の計測要素であるカメラによる撮影画像を用いて行われ、別個の計測要素の計測結果における信頼性を利用して地表面以外を示すレーザデータ5を高い確度で抽出し、これを除去することによりなされる。すなわち、カメラの撮影画像は自然地物の表面を捉えることができるために、これに基づいて生成される数値表層モデル8(DSM:Digital Surface Model)には自然地物の表面の三次元座標が反映されており、対応する三次元座標を有するレーザデータ5を除去することで自然地物を示すことが明らかなレーザデータ5を除去することができ、これにより地表面候補データ6を抽出することができる。
【0011】
自然地物である植物が繁茂する樹林地帯に対し、上空からレーザ光2を照射した場合について以下に具体的に考える。この場合には、図3(c)に示すように、一発のレーザ照射光2(照射パルス)に対し、例えば、樹冠などに反射して最初に戻ってくる反射光3A(反射パルス、特に「ファーストパルス、First pulse」とも呼ばれる)に加え、枝葉の隙間などを通過することで地表面(地表面候補)などに反射して最後に戻ってくる反射光3B(反射パルス、特に「ラストパルス、Last pulse」とも呼ばれる)、さらには、以上の樹冠と地表面との間の下草などに反射して戻ってくる反射光3C(反射パルス、「2nd pulse」や「3rd pulse」などとも呼ばれ、総括して「中間パルス」とも呼ばれる)をも取得できるときがある。すなわち、レーザ光2が枝葉の隙間や樹間などを通過することで、表層の樹冠以外に反射した反射光3をも取得することができる。これに対してカメラ撮影においては、枝葉の隙間の奥などの陰になるような部分を捉えることは難しく、このため、ほぼ表層の樹冠のみが捉えられることになる。
【0012】
したがって、カメラ撮影に基づいて数値表層モデル8を生成すると、その三次元座標は樹冠の位置、より正確には樹冠の外縁を示すものになり、これに相当する3次元座標を有するレーザデータ5を除去対象にすれば、樹冠を示すレーザデータ5、すなわち地表面以外を示すレーザデータ5を除去することができる。上述した従来例においても示す通り、反射光3の全体における樹冠に反射したものの割合は一般に高い傾向が認められることから、以上の除去により、高い割合で地表面以外を示すレーザデータ5を除去することができ、レーザデータ群5、5、・・の絞り込みを行うことができる。また、除去されたレーザデータ5は、カメラ撮影に基づいて地表面を示すものではないことが担保されているために、この後さらにフィルタリング処理を重ねて行う場合には、例えば残余のレーザデータ群5、5、・・から経験則に基づいて地表面以外と判断することができる特定のレーザデータ5の適数を削除するだけで足りる。このため、例えば従来のように過って除去されてしまった地表面候補データ6がある可能性を考慮したフィルタリング処理の検証作業が不要になり、作業効率が極めて向上する。
【0013】
以上のフィルタリング処理は、具体的には、カメラ画像に基づく数値表層モデル8の生成に関しては、ステレオマッチング処理により、また、除去対象のレーザデータ5の判定に関しては、上述したようにレーザ光2が枝葉の間を通過したものであるか否か、すなわち数値表層モデル8とレーザデータ5の標高座標値を比較することにより行うことができる。この比較に際しては、数値表層モデル8やレーザデータ5の三次元座標がある程度精密な精度を備える場合にはそもそも両者の数値としての完全な一致が望めないことは明らかであるから、誤差などを考慮した所定の許容範囲Rを設定し、数値表層モデル8の標高座標値に対してレーザデータ5の標高座標値が所定の範囲R内にあるか否かによって行うことができる。さらに、以上の数値表層モデル8を生成するためのカメラ画像7は、飛行体1にレーザ測距装置とともにカメラを搭載しておいてレーザデータ5と同時取得すれば効率的に計測作業を進めることができ、また、例えば飛行高度を異ならせてレーザデータ5とは別個に取得することでレーザデータ5との地上分解能の差を軽減させることも可能である。
【0014】
また、上記数値表層モデル8は、具体的には例えば不整三角形網(TIN:Triangulated Irregular Network)などとして構成することが可能であり、この場合、原則として座標計測点を頂点とする三角形が作り出す面によって座標計測点間の標高座標が補間されることになる。したがって全体としては補間によって標高座標が特定される領域が大部分を占め、レーザデータ5との座標比較をこの分解能に従って行うことができる反面、その比較に際しては膨大な演算処理を要することになってしまう。この点、上記数値表層モデル8に平面座標に基づくメッシュ9を設定し、各メッシュ9の中心点をメッシュ代表点10として各メッシュ8内の全ての標高座標値をメッシュ代表点10の標高座標値と一致するものと仮定した上でレーザデータ5と座標比較した場合には、演算処理を軽減することができる上に、メッシュ9の中心点を基準にすることで標高座標値にあまり大きな変化が生じにくいことから、上述したようにそもそも補間によって推定されていた標高座標値と比べて過度に位置精度が劣ってしまうということもない。この場合、具体的には、平面座標上で直交する各座標軸X、Y方向のそれぞれにおいて上記メッシュ代表点10に対してメッシュサイズaの半分以内の平面座標値を有するレーザデータ5の標高座標値をメッシュ代表点10の標高座標値と比較して演算処理することができる。
【0015】
なお、数値表層モデル8とレーザデータ5の位置精度が異なる場合には、上述したメッシュサイズaの大きさをこの違いを考慮して設定することにより、計測誤差をも軽減させることができる。
【0016】
また、以上においてはレーザ光2とは別個の計測要素であるカメラの撮影画像7を用いて生成した数値表層モデル8を用いる場合を示したが、適宜の数値表層モデル8が入手可能な場合などにおいては、このような数値表層モデル8をそのまま利用すればステレオマッチング処理などの手間を軽減することができる。この場合には、入手した数値表層モデル8がカメラの重複撮影画像7を用いて生成されていない可能性もあるが、レーザデータ群5、5、・・から地表面以外を示すレーザデータ5を抽出することの信頼性は、入手した数値表層モデル8自体の信頼性に依存するので、これを確保することにより適宜確保することができる。
【0017】
以上のレーザデータ5のフィルタリングは、
上空を飛行する飛行体1から地上の所定領域にレーザ光2を掃射して得られる反射光3の取得タイミングと、各レーザ光2の発射位置および発射方向とにより反射点4の三次元座標を演算して生成され、単一のレーザ照射光2から得られる複数の反射点4の三次元座標を含むレーザデータ群5、5、・・から地表面候補データ6を抽出するレーザデータのフィルタリング装置であって、
前記所定領域を飛行体1から重複してカメラ撮影して得られる重複撮影画像7、各画像7の撮影位置および撮影方向が入力される入力部11と、
前記撮影位置および撮影方向を用いて重複撮影画像7をステレオマッチング処理して前記所定領域の三次元座標データを有する数値表層モデル8を生成するDSM生成部12と、
前記数値表層モデル8と各レーザデータ5の標高座標値を比較し、数値表層モデル8の標高座標値に対して所定の範囲R内にある標高座標値を有するレーザデータ5を前記レーザデータ群5、5、・・から除去して地表面候補データ6を抽出するフィルタリング処理部13とを有するレーザデータのフィルタリング装置を用いることにより実現することができる。
【発明の効果】
【0018】
以上の説明から明らかなように、本発明によれば、信頼性の高いレーザデータのフィルタリング方法を提供することができ、自然地物を除いた地表面の数値モデルを効率的に生成することができる。また、信頼性の高いレーザデータのフィルタリング装置を提供することができ、自然地物を除いた地表面の数値モデルの効率的な生成設備の充実を図ることができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係るフィルタリング装置を一部に含むDTM生成装置のハードウェア構成図である。
【図2】飛行体に搭載される計測システムのハードウェア構成図である。
【図3】地上の計測状態を説明する図で、(a)はレーザ測距装置によるスキャンパターンを示す図、(b)は(a)に対応してカメラによる撮影状況を示す図、(c)は自然地物からの反射光を説明する図である。
【図4】レーザデータの分布状態を説明する図で、(a)は標高方向のイメージ図、(b)は(a)の4B部分の平面方向のイメージ図であってメッシュを設定した数値表層モデルを重ねて表示したものである。
【図5】レーザデータの地形形状との相対位置関係を示す標高方向の詳細イメージ図であり、(a)はレーザデータとしてフィルタリング処理前のものを対象にしたもので、メッシュが設定された数値表層モデルを重ねて表示した図、(b)はフィルタリング処理後を示す図、(c)は変形例を(a)に対応して示す図である。
【図6】本発明に係るフィルタリング処理のフローチャートである。
【発明を実施するための形態】
【0020】
図1ないし図6に森林地帯の所定領域を対象にしたDTM(Digital Terrain Model、数値地形モデル)生成の概要を示す。図1は本発明に係るフィルタリング装置を一部に含むコンピュータからなるDTM生成装置を示すもので、自然地物である植生が密生している地域でのDTM生成のために、DTM生成装置の入力部11には、レーザ測距データ、GPS/IMUデータ、撮影画像データ、地上基準点(GCP:Ground Control Point)データが入力される。これらレーザ測距データ等は、その一部を除いて図2に示す計測システム20を搭載した航空機(飛行体)1をDTM生成対象領域としての上述した所定領域の上空で飛行しながら取得される。
【0021】
この計測システム20は、コンピュータからなるコントロールラック装置21と、レーザ測距装置22と、撮影装置23と、GPS/IMU装置24とを有する。コントロールラック装置21は、レーザ測距装置22、撮影装置23、およびGPS/IMU装置24のそれぞれを制御するコントロール部21aを備え、これらの制御対象機器を制御して取得したデータをその取得時刻に関連づけて記録部21bに記録する。
【0022】
レーザ測距装置22は、レーザ出力部22aにより出力されるレーザ媒質をレーザ発振部22bで増幅させてレーザ光2として発振させるとともに、このようにして発振されたレーザ光2の反射光3を検知するレーザ受信部22cを備える。レーザ発振部22bから発射されたレーザ光2は、スキャニング機構部22dの反復回転するミラーにより進行方向を振り分けられ、上記レーザ受信部22cはスキャニング機構部22dを介して反射光3を検知する。
【0023】
以上のレーザ光2の発射、ミラーの回転は上述したコントロール部21aにより制御され、レーザ光2の発射タイミング、発射時のミラーの角度が上述した記録部21bに記録される。また、レーザ受信部22cにより反射光3の受光が検知されると、距離データとして機能する反射光3の受光検知タイミングが距離測定部22eによって同様に記録部21bに記録される。なお、距離測定部22eによってレーザ光2の発射タイミングと反射光3の受光検知タイミングとの時間差、およびこの時間差によるレーザ発射点から反射点4までの距離を演算させ、記録部21bに上述した発射・受光検知タイミングのデータに代えて直接距離データを記録させて構成することも可能である。
【0024】
撮影装置23は、コントロール部21aによる撮影タイミング、焦点距離、撮影方位(俯角)などの制御に従って撮影を行うデジタルカメラであり、撮影により取得された撮影画像7は上述した撮影タイミング等とともに撮影画像データとして記録部21bに記録される。この撮影装置23は、1つの撮像素子(カメラ)で構成し、その撮影領域がほぼ隣接するように飛行コースを変えながら撮影する以外に、複数の撮像素子を備えて構成することも可能である。具体的には、後述する撮影状況にも示すように、例えば複数台(本実施例では5台)のカメラを互いの撮影領域がほぼ隣接するように異なる方向に向けて並べるなどして構成し、一度に広範囲の画像を取得することもできる。
【0025】
GPS/IMU装置24は、GPSによる位置情報と、IMU(Inertial Measurement Unit、慣性計測装置)による姿勢情報を取得するもので、GPS衛星からの電波を受信するGPSアンテナ24aと、加速度計とジャイロによりローリング(ω)、ピッチング(φ)、ヘディング(κ)の3方向の傾きについての角速度と加速度を計測するIMUセンサ部24bとを備える。これらGPSアンテナ24aおよびIMUセンサ部24bは、上述したコントロール部21aにより制御されるGPS/IMUコンピュータ部24cにより制御されており、所定の時間間隔で位置情報や姿勢情報が上述した記録部21bに記録される。
【0026】
したがって航空機1をDTM生成対象領域の上空で飛行させ、レーザ光2をスキャニング機構部22dによって飛行方向に直行する方向に振り分けることにより、例えば図3(a)に示すように、レーザ光2が、DTM生成対象領域を面的に網羅するように掃射され、また、各レーザ照射光2の発射タイミング、発射時のミラーの角度、反射光3の受光検知タイミングがレーザ測距データとして記録部21bに記録される。なお、図3(a)において矢印は航空機1の飛行航路である。また、図3(a)においてはスキャニングを平行線(パラレル)状にトレースする場合を示したが、ジグザグ状や正弦波状などにトレースすることも可能である。
【0027】
さらに、DTM生成領域が森林地帯であるために、図3(c)に示すように、一発のレーザ照射光2が樹木25の葉25aや下草26、地表面27などの複数の反射点4においてそれぞれ反射する場合も生じる。この場合、レーザ受信部22cは、ファーストパルス3A、中間パルス3C、ラストパルス3Bのそれぞれを検知し、記録部21bにはこれら複数の反射光3の検知タイミングが記録される。
【0028】
また、同様に航空機1をDTM生成対象領域の上空で飛行させ、短い時間間隔で撮影装置23によって連続撮影することにより、例えば図3(b)に示すように、それぞれ飛行方向にややずれた位置で撮影されて撮影領域が飛行方向に連続する撮影画像7の複数が取得され、記録部21bに撮影画像データとして記録される。なお、図3(b)において矢印は航空機1の飛行航路、白丸は撮影地点を示す。また、飛行方向において隣接する撮影画像7間で撮影領域の一部が重複するオーバーラップが設定されることにより、同一領域が異なる撮影位置で重複して撮影される。さらに、この撮影に先立ってDTM生成対象領域には、予め測量されることによって位置座標が特定された図示しない地上基準点が設置あるいは設定され、上述した撮影画像7には地上基準点が同時に撮影される。
【0029】
なお、図3(b)は、解像度および撮影効率を考慮して、撮影領域が飛行方向に対する直行方向に長くなるように撮影装置23として5台のカメラを用いるなどし、各撮影地点で5つの撮影画像7を同時取得する場合を示しており、この場合飛行方向に対して直交方向に隣接する撮影画像同士7、7には、撮影領域の一部が重複するサイドラップが設定される。また以上の5台のカメラに代えて、単一のカメラで撮影したり、あるいは航空写真測量用の複数の撮像素子を備えたいわゆるエリアセンサやラインセンサで撮影したりすることも可能である。また、撮影装置23としてアナログカメラを用いることも可能であり、この場合には撮影した写真をスキャナで読み取ることにより撮影画像7データが生成される。
【0030】
さらに同様に、GPS/IMU装置24により、DTM生成対象領域の上空を飛行する航空機1の位置情報と姿勢情報が記録部21bに記録される。連続キネマティック法によるGPS測位を利用するこの実施の形態において、上述したGPS/IMUデータは、このようにして取得された航空機1の位置情報と姿勢情報に加え、図示しない地上の地上基地局においてGPSアンテナを用いて同時刻に取得した位置情報を加えて構成される。
【0031】
以上のようにして計測システム20や地上基準局により取得されたレーザ測距データ、GPS/IMUデータ、撮影画像データは、上述した記録部21bを構成するハードディスクや適宜の記憶媒体に記録され、DTM生成装置の入力部11は、これらのハードディスク等への接続端子などを備えて構成される。また、入力部11はインターネットへの接続回線を備え、DTM生成装置の後述する演算部が有するブラウザソフトを利用することにより、上述した地上基準点の位置座標が例えば国土地理院のウェブページからのダウンロードにより地上基準点データとして入力される。
【0032】
以上の各種データが入力部11から入力されるDTM生成装置は、入力データを用いて、全てのレーザ光2の反射点4の三次元座標を演算してレーザデータ群5、5、・・を生成するレーザデータ算出処理部28と、撮影領域が重複する撮影画像7を用いてDTM生成対象領域の数値表層モデル8を生成するDSM生成部12とを有する演算部29を備える。上記レーザデータ算出処理部28は、上述した航空機1の位置、姿勢を地理座標上で算出するGPS/IMU解析処理部30と、レーザ測距装置22による計測結果を用いて、DTM生成対象領域に関する三次元座標をレーザデータ5に基づいて算出するレーザ・GPS等データ結合処理部31とを有し、上記GPS/IMU解析処理部30は、DTM生成対象領域に関する三次元座標を撮影装置23による撮影画像7に基づいて算出する撮影画像・GPSデータ等結合処理部32とともにDSM生成部12を構成する。
【0033】
上記GPS/IMU解析処理部30は、例えばApplanix社のGPS/IMU解析処理ソフトウェアなどの市販のソフトウェアで構成される。具体的には、GPSアンテナ24aを介して取得した航空機GPSデータと、IMUセンサ部24bにより取得したIMUデータと、上述した地上基準点データとのそれぞれについて時間を基準にして結合させることにより、航空機1の飛行位置と飛行時の揺動を算出し、航空機1の位置と姿勢角を記録した航空機位置・姿勢角データを生成する。なお、航空機1の位置は、航空機1のGPSデータと地上基準点データを基線解析処理することにより算出することができる。
【0034】
レーザ・GPS等データ結合処理部31は、GPS/IMU解析処理部30から取得した航空機位置・姿勢角データと、入力部11から取得したレーザ測距データとにより、レーザ光2の全ての反射点4の三次元座標を演算してレーザデータ群5、5、・・を算出する。具体的には、反射点4の座標値は、レーザ光2発射時の航空機1の位置を基本にして、レーザ光2の発射方向をローリング角(ω)、ピッチング角(φ)、ヘディング角(κ)の3方向から求め、レーザ光2の発射・受光検知タイミングの時間差を利用して求めたレーザ測距装置22から反射点4までの距離を用いて算出される。ローリング(ω)方向は航空機1の傾きとレーザ測距装置22のミラー角度から、ピッチング(φ)およびヘディング(κ)方向はIMUの計測値から算出する。図4に以上のようにして生成されたレーザデータ群5、5、・・について、標高方向と平面方向のそれぞれにおいて各反射点4の座標を点で表したイメージを示す。なお、レーザ・GPS等データ結合処理部31は、以上のようにして算出されたレーザデータ群5、5、・・の三次元座標についての測地座標系から平面直角座標系への座標換算や、楕円体高から標高への変換処理を行い、また、演算部29は図示しないノイズ除去部を有し、レーザ・GPS等データ結合処理部31から出力されて後述するフィルタリング処理部13に入力される前のレーザデータ群5、5、・・からノイズ除去部によりノイズデータを除去する。
【0035】
撮影画像・GPSデータ等結合処理部32は、上記航空機位置・姿勢角データと、入力部11から入力された撮影画像データおよび地上基準点データとにより数値表層モデル8を生成する。具体的には、いわゆる写真測量であり、飛行方向に隣接することで視差を有する撮影画像同士7、7をそれぞれ撮影位置・撮影方向と、撮影重複領域に適宜設定した標定点とで相互に関連付け、地上基準点を利用して3次元座標を付与する。各撮影画像7の撮影位置、撮影方向は、撮影画像データに含まれる撮影時のカメラの俯角と航空機1位置・姿勢角データとにより演算され、これら撮影位置および撮影方向と、上述した標定点および地上基準点、さらには撮影画像データに含まれる焦点距離等を利用してステレオマッチング処理することによりステレオモデル(数値表層モデル8)が生成される。なお、上述した標定点は各撮影画像7の周縁部における特徴点を自動抽出して生成される。
【0036】
また、以上のようにして飛行方向に並ぶ撮影画像7、7、・・により生成されたステレオモデルは、上述したように飛行方向に直交する方向に配置された複数の撮影画像7のそれぞれにより生成され、これらステレオモデル同士を標定点で結合してDTM生成領域全体の数値表層モデル8が生成される。この数値表層モデル8は、撮影画像7、7間でのステレオマッチングに際して用いた同調ポイントなどを利用することにより、例えば不整三角形網として構成される。
【0037】
さらに、上述した演算部29は、以上のようにしてDSM生成部12により生成した数値表層モデル8を用いて、上述したレーザデータ群5、5、・・から地表面候補データ6を抽出するフィルタリング処理部13を有するとともに、このフィルタリング処理部13によるフィルタリング処理の前処理として数値表層モデル8にメッシュ9を設定するメッシュ設定部33を有する。メッシュ設定部33は、数値表層モデル8に平面座標に基づくメッシュ9を設定するもので、メッシュサイズaは例えば撮影画像7の単一の画素に対応する領域と同じ程度の大きさなどに設定される。また、メッシュ設定部33は、各メッシュ9の中心点をメッシュ代表点10として抽出し、このメッシュ代表点10の標高座標値を不整三角形網に基づいて演算してメッシュ9毎の標高代表値として設定する。なお、以上のメッシュ9、メッシュサイズa、メッシュ代表点10について図4の一部を利用して例示する。
【0038】
フィルタリング処理部13は、以上のようにメッシュ9単位で標高代表値が設定された数値表層モデル8とレーザデータ群5、5、・・の各レーザデータ5とをそれぞれの三次元座標により比較し、数値表層モデル8に相当する三次元座標のレーザデータ5を除去してレーザデータ群5、5、・・から地表面候補データ6を抽出する。レーザデータ5と上述したメッシュ代表点10との三次元座標値の比較は、各メッシュ代表点10の平面座標値(x、y)に対し、X、Y軸方向のそれぞれについて上述したメッシュサイズaの半分の許容範囲を設定し、この許容範囲内の平面座標値を有するレーザデータ5を抽出した上で、このレーザデータ5の標高座標値とメッシュ代表点10の標高座標値を比較してなされる。また、標高座標値同士の比較に際しては所定の許容誤差(許容範囲)Rが設定され、この許容誤差Rは、図1に示す入力部11が備えるキーボードなどから入力されたメッシュ9毎の許容誤差Rの上限側許容値βおよび下限側許容値αとして構成される。
【0039】
この実施の形態において、許容誤差Rの上限側許容値βは、レーザ計測における標高方向の誤差とカメラ撮影における標高方向の誤差とに基づき、例えば両者の集積誤差が採用される。また、下限側許容値αは、メッシュ9内に繁茂する植生の背丈を考慮して決定され、例えばこの背丈が上述した集積誤差と同じ場合にはそのまま背丈の寸法を採用し、背丈が集積誤差を超える場合には、背丈と集積誤差をさらに集積するなどして算出される。
【0040】
以上の植生の背丈は、例えば植生の種類と、その平均的な背丈とを対応づけたテーブルを演算部29に設け、このテーブルから選択して適用するようにすることが可能である。この選択に際しては、カメラ画像7に表れる色や、レーザ測距装置22により取得することが可能なレーザ光2の反射強度を参考にすることができる。
【0041】
図5は以上のフィルタリング処理部13によるレーザデータ5の除去処理を説明するもので、図においてハッチングは地形34を、2点鎖線は樹冠の外縁35を、棒グラフ状の部分はメッシュ9毎の標高座標値をその高さで表した数値表層モデル8を、黒丸及び白丸はレーザデータ5を、矢印はメッシュ9に設定された許容誤差の範囲Rを表したものである。なお、許容誤差の範囲Rは、図が煩雑にならないように一部のメッシュ9に対応するもののみを表した。図5(a)はレーザデータ5の除去処理前の状態であり、白丸は標高座標値が許容誤差R内であるレーザデータ5を、黒丸は許容誤差R外であるレーザデータ5(地表面候補データ6)を示す。また、図5(b)はレーザデータ5の除去処理後の状態である。これらの図から明らかなように、数値表層モデル8に基づいたレーザデータ5の除去処理により、地表面以外を示すレーザデータ5が高い割合で除去され、地表面候補データ6が抽出される。
【0042】
また、図5(c)は許容誤差Rの下限側許容値αをより厳密に設定した変形例を示すもので、この場合には、上述した図5(b)においては除去されなかった二重丸で示す地表面以外を示すレーザデータ5が除去される。以上の許容誤差Rの下限側許容値αの厳密な設定は、例えば植生の背丈を実測に基づいて設定することなどによりなされる。
【0043】
さらに、フィルタリング処理後のレーザデータ群5、5、・・に基づいてDTMを生成するために、演算部29は、修正処理部35とメッシュ加工部36とを備える。修正処理部35は、入力部11の図示しないマウス等を用いたオペレータからの入力操作により、フィルタリング処理後のレーザデータ群5、5、・・からさらにレーザデータ5の適数を除去する。例えば図外のモニタにレーザデータ群5、5、・・の標高方向の分布を表示し、これを観察したオペレータにより入力部11を介して除去対象のレーザデータ5の指定が入力されたときに、当該レーザデータ5を除去する。この修正処理後のレーザデータ群5、5、・・は、地表面である蓋然性が高いレーザデータ5のみで構成される。
【0044】
メッシュ加工部36は、修正処理部から出力されたレーザデータ5に基づいてDTMを生成するもので、この生成に際しては、不均一な分布状態となっているレーザデータ群5、5、・・を補間処理し、所定の密度間隔のメッシュデータに処理された上で、このメッシュデータに基づいてDTMとしての不整三角形網が生成される。補間処理は、例えば最近隣法や逆距離加重法などによって行うことが可能である。
【0045】
生成されたDTMは、図1に示すDTM生成装置の出力部37を介してモニタや適宜の記憶媒体に出力することができる。なお、図1において38は、DTM生成装置内においてレーザデータ5のフィルタリング処理を分担するフィルタリング処理装置を示すものである。
【0046】
したがって以上のDTM生成装置によるDTMの生成処理は、先ず、入力部11から入力されたレーザ測距データ、GPS/IMUデータに基づいて演算部29によりレーザデータ群5、5、・・を生成するとともに、同様に入力部11から入力された撮影画像データ、地上基準点データ、および上述したGPS/IMUデータに基づいて演算部29により数値表層モデル8を生成することによりなされる。また、このようにして生成された数値表層モデル8には、メッシュ9が設定され、各メッシュ9の中心点はメッシュ代表点10に設定される。次いで、レーザデータ群5、5、・・は、メッシュ代表点10と標高座標値を比較され、メッシュ代表点10に相当する三次元座標を有するレーザデータ5が除去されて地表面候補データ6が抽出される。この後、地表面候補データ6は、修正処理(2次フィルタリング処理)を経た上で、補間されてメッシュデータにされ、このメッシュデータによりDTMが生成される。
【0047】
また、上述したフィルタリング処理装置によるフィルタリング処理としては、図6に示すように、上述した数値表層モデル8の生成(ステップS1)、メッシュ9の設定(ステップS2)を経た後、レーザデータ5とメッシュ代表点10の標高座標値を比較(ステップS3)する。この比較は、具体的には図6に示す数式に基づいて行われ、この後、比較されたレーザデータ5の除去(ステップS4-1)、あるいは採用(ステップS4-2)が判定される。以上の比較・判定処理は全てのレーザデータ5に対してなされるまで繰り返され(ステップS5)、これによって地表面候補データ6のみが抽出されてフィルタリング処理が終了する。なお、このフィルタリング処理は、以上のコンピュータの実行手順が記載されたコンピュータプログラムによって構成することができる。
【0048】
なお、上述した実施の形態においては、2次フィルタリング処理としてオペレータの判断に基づくマニュアル処理を行う場合を示したが、適当なフィルタリングのパラメータが設定可能な場合には、コンピュータプログラムによる自動処理として構成することも可能である。また同様に、レーザデータ5が森林地帯に対象にして取得される場合を示したが、一部に植生が含まれるような地域を対象にすることも可能であり、この場合には必要に応じて例えば、取得される植生域のみの地表面候補データ6を他の適宜の地表面候補データと組み合わせるなどしてより広い領域の地表面候補データを生成できるようにすることなども可能である。
【符号の説明】
【0049】
1 飛行体
2 レーザ光
2A 単一のレーザ照射光
3 反射光
4 反射点
5 レーザデータ
6 地表面候補データ
7 撮影画像
8 数値表層モデル
9 メッシュ
10 メッシュ代表点
11 入力部
12 DSM生成部
13 フィルタリング処理部
R 許容誤差(許容範囲)
X、Y 平面座標上で直交する各座標軸
a メッシュサイズ
【特許請求の範囲】
【請求項1】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング方法であって、
前記所定領域を飛行体から重複してカメラ撮影して得られる重複撮影画像と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデルを生成し、
次いで、該数値表層モデルと各レーザデータの標高座標値を比較し、数値表層モデルの標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するレーザデータのフィルタリング方法。
【請求項2】
前記数値表層モデルに平面座標に基づくメッシュを設定した後、
各メッシュの中心点をメッシュ代表点として抽出し、平面座標上で直交する各座標軸方向のそれぞれにおいて前記メッシュ代表点に対してメッシュサイズの半分以内の平面座標値を有するレーザデータの標高座標値をメッシュ代表点の標高座標値と比較する請求項1記載のレーザデータのフィルタリング方法。
【請求項3】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング方法であって、
前記所定領域の三次元座標を有する数値表層モデルを取得して該数値表層モデルに平面座標に基づくメッシュを設定した後、各メッシュの中心点をメッシュ代表点として抽出し、
次いで、平面座標上で直交する各座標軸方向のそれぞれにおいて前記メッシュ代表点に対してメッシュサイズの半分以内の平面座標値を有するレーザデータの標高座標値をメッシュ代表点の標高座標値と比較し、メッシュ代表点に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するレーザデータのフィルタリング方法。
【請求項4】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング装置であって、
前記所定領域を飛行体から重複してカメラ撮影して得られる重複撮影画像、各画像の撮影位置および撮影方向が入力される入力部と、
前記撮影位置および撮影方向を用いて重複撮影画像をステレオマッチング処理して前記所定領域の三次元座標データを有する数値表層モデルを生成するDSM生成部と、
前記数値表層モデルと各レーザデータの標高座標値を比較し、数値表層モデルの標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するフィルタリング処理部とを有するレーザデータのフィルタリング装置。
【請求項1】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング方法であって、
前記所定領域を飛行体から重複してカメラ撮影して得られる重複撮影画像と、各画像の撮影位置および撮影方向とを用いたステレオマッチング処理により前記所定領域の三次元座標を有する数値表層モデルを生成し、
次いで、該数値表層モデルと各レーザデータの標高座標値を比較し、数値表層モデルの標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するレーザデータのフィルタリング方法。
【請求項2】
前記数値表層モデルに平面座標に基づくメッシュを設定した後、
各メッシュの中心点をメッシュ代表点として抽出し、平面座標上で直交する各座標軸方向のそれぞれにおいて前記メッシュ代表点に対してメッシュサイズの半分以内の平面座標値を有するレーザデータの標高座標値をメッシュ代表点の標高座標値と比較する請求項1記載のレーザデータのフィルタリング方法。
【請求項3】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング方法であって、
前記所定領域の三次元座標を有する数値表層モデルを取得して該数値表層モデルに平面座標に基づくメッシュを設定した後、各メッシュの中心点をメッシュ代表点として抽出し、
次いで、平面座標上で直交する各座標軸方向のそれぞれにおいて前記メッシュ代表点に対してメッシュサイズの半分以内の平面座標値を有するレーザデータの標高座標値をメッシュ代表点の標高座標値と比較し、メッシュ代表点に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するレーザデータのフィルタリング方法。
【請求項4】
上空を飛行する飛行体から地上の所定領域にレーザ光を掃射して得られる反射光の取得タイミングと、各レーザ光の発射位置および発射方向とにより反射点の三次元座標を演算して生成され、単一のレーザ照射光から得られる複数の反射点の三次元座標を含むレーザデータ群から地表面候補データを抽出するレーザデータのフィルタリング装置であって、
前記所定領域を飛行体から重複してカメラ撮影して得られる重複撮影画像、各画像の撮影位置および撮影方向が入力される入力部と、
前記撮影位置および撮影方向を用いて重複撮影画像をステレオマッチング処理して前記所定領域の三次元座標データを有する数値表層モデルを生成するDSM生成部と、
前記数値表層モデルと各レーザデータの標高座標値を比較し、数値表層モデルの標高座標値に対して所定の範囲内にある標高座標値を有するレーザデータを前記レーザデータ群から除去して地表面候補データを抽出するフィルタリング処理部とを有するレーザデータのフィルタリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−158278(P2011−158278A)
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願番号】特願2010−18252(P2010−18252)
【出願日】平成22年1月29日(2010.1.29)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成23年8月18日(2011.8.18)
【国際特許分類】
【出願日】平成22年1月29日(2010.1.29)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]