
レーザビーム画像コントラスト増強
【課題】位置決めマーカの場所でレーザビームを検出するためのシンプルで安価な方法およびシステムの提供
【解決手段】位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、レーザビームを出力するレーザ源と、該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、該偏光フィルタの出力を受信するように動作可能な画像化装置とを含む。また、レーザコントラスト増強のためのシステムは、所定の位置に位置決めされたターゲットと、移動ユニットとを含み、該移動ユニットは、ビームを出力するレーザと、画像を捉えるように動作可能な画像化装置と、該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタとを含む。
【解決手段】位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、レーザビームを出力するレーザ源と、該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、該偏光フィルタの出力を受信するように動作可能な画像化装置とを含む。また、レーザコントラスト増強のためのシステムは、所定の位置に位置決めされたターゲットと、移動ユニットとを含み、該移動ユニットは、ビームを出力するレーザと、画像を捉えるように動作可能な画像化装置と、該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
(技術分野)
本発明は、画像コントラスト増強に関する。より特定的には、本発明は、位置決めあるいはドッキングアプリケーションのための画像コントラスト増強に関する。
【背景技術】
【0002】
位置決めタスクは、タキメータあるいは電子セオドライトのような、複雑なかつ高価なデバイスを使用して実行され得る。そのような位置決めデバイスは、例えば、デジタルカメラあるいはレーザのような、1つ以上の補助的な測定構成部品を含み得る。デジタルカメラあるいはレーザは、測定目的のために、あるいは注目している領域を監視するために使用され得る。いくつかの場合には、ボードにレーザが搭載されていない場合であっても、(人々のグループにプレゼンテーションする場合に使用されるような)市販のレーザポインタが、位置決めが望まれる物体に取り付けられ得る。
【0003】
レーザを使用する場合、感知あるいは分析のために、あるタイプの受信器が出力されたレーザビームを受信するために必要とされる。特に、レーザと受信器の両方が、位置決めに関係する物体に配置されている場合、デジタルカメラが既知の位置に配置された1つ以上のマーカと共に使用され得る。デジタルカメラは、マーカの画像を捉え、レーザから出力されたレーザビームがマーカ上で衝突する場合、マーカとレーザビームの両方が画像に捉えられ、従って、既知の位置でのレーザビームの検出を提供する。デジタルカメラおよびマーカの使用は、光検出器のような特定のレーザ受信器を必要とせずに、可視レーザビームあるいはレーザスポットの認識を提供する。
【0004】
一般には、全体の複合位置決め/測定デバイスへの補助構成部品として含まれるレーザおよびデジタルカメラは、コストを低く抑えるために、低品質の傾向がある。レーザビームは、低ビーム強度と小さなレーザスポットサイズを有する傾向があり、および/またはデジタルカメラは、不十分な画像処理能力による有意なノイズ成分を有する傾向がある。結果として、レーザビームは、補足された画像上にはほとんど見えないように現われることがあり得、マーカと衝突するレーザビームは検出できないことがあり得る。
【0005】
高品質のレーザビームおよび/またはデジタルカメラが使用される場合であっても、補助的な構成部品か、あるいはスタンドアロンの位置決めデバイスのいずれかとして、マーカ部でのレーザビームの存在を正確に検出するために、洗練された画像処理が必要とされ得る。これは、周囲の照明が強いか、あるいは他の干渉効果がある場合であり得る。
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、位置決めマーカの場所でレーザビームを検出するためのシンプルで安価な方法およびシステムの提供は有益であろう。安価な、および/または低品質のレーザ源、および/または画像化装置を使用する場合であっても、正確なレーザ検出の提供は有益であろう。標準的な画像スキャンを使用する画像コントラスト増強方法を提供することは有益であろう。追加の信号処理を必要とせずに正確な位置検出を提供することは有益であろう。シンプルで安価な位置決め、方向付け、あるいはマシン制御機構を提供することは有益であろう。
【課題を解決するための手段】
【0007】
本発明の1つの実施形態では、位置あるいは方向決定のための移動物体が装備される。移動物体は、レーザビームを出力するレーザ源と、レーザビームの反射を入力として受信するように動作可能な偏光フィルタとを含む。移動物体は、偏光フィルタの出力を受信するように動作可能な画像化装置をさらに含む。レーザビームが、所定の位置に配置された金属のマーカプレートと衝突する場合、偏光フィルタは、レーザビームの反射に関連する画像成分の強度レベルを仮想的に不変に保ちながら、反射に関連していない画像成分の強度レベルを減少する。画像化装置は、そのようなフィルタされた画像成分を使用して、レーザビームがマーカプレートと衝突する瞬間を判断する。マーカプレートの位置は既知であるので、マーカプレートと衝突するレーザビームの検出は、対象区域近傍における移動物体の存在を表わす。従って、移動物体の位置および/または方向が決定され得る。
【0008】
本発明の他の実施形態では、移動ユニットの位置あるいは方向を決定するための方法が提供される。方法は、移動ユニットに含まれるレーザからのレーザビームを提供することと、画像化装置において画像を受信することとを含む。方法は、画像化装置の前にフィルタを提供することと、閾値強度レベル以上にある画像を含むピクセルを識別することとをさらに含む。閾値強度レベル以上にある十分な数の隣接するピクセルは、レーザビームの反射を表わす。
【0009】
本発明の他の特徴および局面が、例示により、本発明の実施形態に従った特徴を例示している添付の図面と共に取られた、以下の詳細な記述から明らかになるであろう。本発明の概要が、本発明の範囲を限定する意図はなく、本発明は、本明細書に添付の特許請求範囲によって規定される。
【0010】
本発明は、さらに以下の手段を提供する。
(項目1)
位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、
レーザビームを出力するレーザ源と、
該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、
該偏光フィルタの出力を受信するように動作可能な画像化装置と
を含む、移動物体。
(項目2)
画像スキャンを実行するための、前記画像化装置と通信するプロセッサをさらに含む、上記項目に記載の移動物体。
(項目3)
前記レーザビームの前記反射は、所定の位置に配置された金属マーカによって起こされており、該反射は、散乱反射を含む、上記項目のいずれか一項に記載の移動物体。
(項目4)
前記偏光フィルタは、円偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目5)
前記偏光フィルタは、直線偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目6)
前記偏光フィルタは、直線偏光フィルタおよび第2の偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目7)
前記偏光フィルタの伝送の主平面は、前記レーザビームの偏光面に実質的に平行である、上記項目のいずれか一項に記載の移動物体。
(項目8)
前記画像化装置は、デジタルカメラを含む、上記項目のいずれか一項に記載の移動物体。
(項目9)
前記画像化装置は、捉えられた画像の隣接する、閾値強度レベル以上のピクセルを識別するように動作可能である、上記項目のいずれか一項に記載の移動物体。
(項目10)
捉えられた画像内の前記レーザビームの前記反射に関連するピクセルは、該捉えられた画像の残りの部分に関連した強度レベルに等しいかまたはそれより大きい強度レベルを有する、上記項目のいずれか一項に記載の移動物体。
(項目11)
移動ユニットの位置あるいは方向を決定する方法であって、該方法は、
該移動ユニットに含まれるレーザからのレーザビームを提供することと、
画像化装置において、画像を受信することと、
該画像化装置の前面にフィルタを提供することと、
閾値強度レベルに等しいかまたはそれより大きい該画像を含むピクセルを識別することであって、閾値強度レベル以上である該ピクセルは、該レーザビームの反射を表わす、ことと
を含む、方法。
(項目12)
所定の位置に金属ターゲットを提供することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目13)
前記金属ターゲットと衝突する前記レーザビームから該レーザビームの前記反射を発生することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目14)
前記フィルタは、1つ以上の偏光フィルタを含む、上記項目のいずれか一項に記載の方法。
(項目15)
前記フィルタを提供することは、前記レーザビームの偏光面に実質的に平行な該フィルタの伝送の主平面を方向付けすることを含む、上記項目のいずれか一項に記載の方法。
(項目16)
閾値強度レベル以上の前記ピクセルの近接を決定することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目17)
レーザコントラスト増強のためのシステムであって、該システムは、
所定の位置に位置決めされたターゲットと、
移動ユニットと
を含み、該移動ユニットは、
ビームを出力するレーザと、
画像を捉えるように動作可能な画像化装置と、
該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタと
を含む
システム。
(項目18)
前記ビームは前記ターゲットと衝突して、散乱反射を発生し、該散乱反射は、前記画像化装置によって捉えられた画像内に含まれる、上記項目のいずれか一項に記載のシステム。
(項目19)
前記移動ユニットは、前記ターゲットへの見通し線の中にあり、前記ビームが該ターゲット上に衝突するように方向付けされている、上記項目のいずれか一項に記載のシステム。
(項目20)
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルを決定するように構成されたプロセッサをさらに含む、上記項目のいずれか一項に記載のシステム。
(項目21)
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルの領域を決定するように構成されたプロセッサをさらに含む、上記項目のいずれか一項に記載のシステム。
(項目22)
前記移動ユニットに含まれるグローバル位置決めシステム(GPS)をさらに含むことにより、該移動ユニットの方向を決定する、上記項目のいずれか一項に記載のシステム。
(摘要)
画像コントラスト増強を提供する装置および方法が開示されている。移動物体は、レーザ源、偏光フィルタ、および画像化装置を備えている。レーザ源出力の反射は、フィルタを通り過ぎ、画像化装置によって受信される。レーザ源の出力が所定の位置に配置された金属マーカプレートと衝突する場合、フィルタは、レーザ源出力の反射に関連しない画像成分の強度レベルを減少する。画像化装置は、そのようなフィルタされた画像成分を使用して、移動物体の位置および/または方向を決定する。
【図面の簡単な説明】
【0011】
例示の実施形態は、添付の図面と共にとられた、以下の詳細な記述からより完全に理解されるであろう。同様な参照数値は同様な要素を示す。
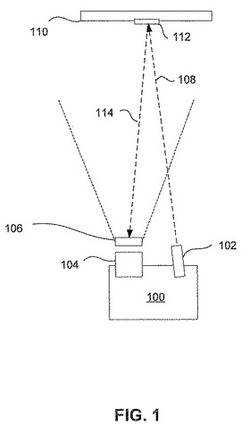
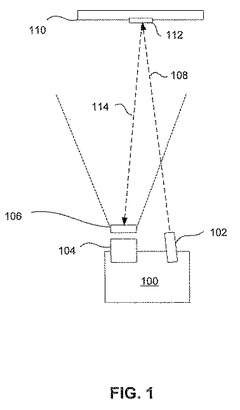
【図1】図1は、本発明の実施形態に従った画像コントラスト増強システムの上面図を例示している。
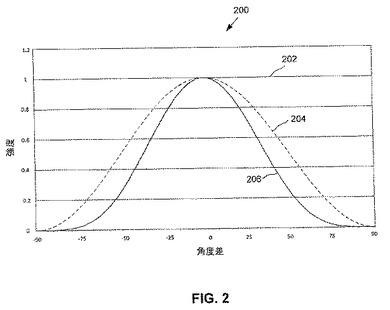
【図2】図2は、本発明の実施形態に従った、異なるフィルタを使用している光強度を示すプロットを例示している。
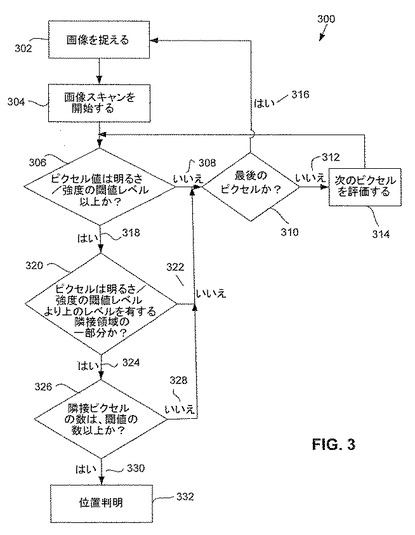
【図3】図3は、本発明の実施形態に従った画像コントラスト増強を実装するフローダイアグラムを例示している。
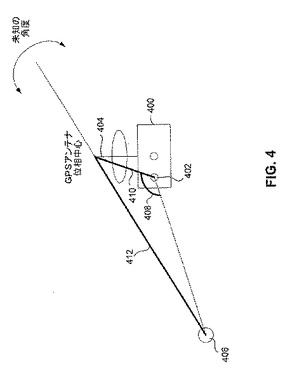
【図4】図4は、本発明の実施形態に従ったユニットの方向を決定するための図式を例示している。
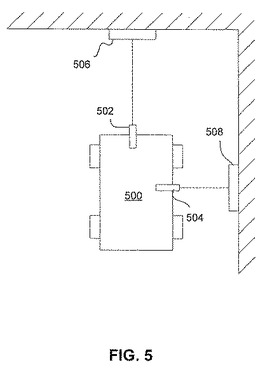
【図5】図5は、本発明の実施形態に従ったユニットの進入あるいは離脱を判断するための図式を例示している。
【0012】
本明細書に提供された表題は、利便性のみのためであり、本請求された発明の範囲あるいは意味に必ずしも影響を与えるものではない。
【発明を実施するための形態】
【0013】
下の詳細な記述は、画像コントラスト増強を提供する装置および方法である。動くあるいは移動物体には、レーザ源、偏光フィルタ、および画像化装置が装備される。レーザ源出力の反射は、フィルタを通り過ぎて、画像化装置によって受信される。レーザ源の出力が、所定の位置に配置された金属マーカプレートと衝突する場合、画像化装置によって受信された画像は、反射に関連する画像成分を含んでおり、該画像成分は、フィルタを通り過ぎた後では、明るさではほとんどの部分では不変であるが、フィルタを通り過ぎた後では、残りの画像成分はより低い明るさになる。それ故に、レーザ源出力が金属マーカプレートに当たる瞬間の判断が起こり得る。そのような判断は、移動している物体の位置および/または方向が知られることを可能にする。
【0014】
以下の記述は、本発明の実施形態の全体の理解のために、および本発明の実施形態の記述を可能にするために特定の詳細を提供する。しかしながら、当業者は、本発明がこれらの詳細がなくても実施され得ることを理解するであろう。他の例では、周知の構造および機能は、本発明の実施形態の記述が必要以上にあいまいになることを避けるために、詳細には示されていないか、あるいは記述されていない。
【0015】
図1を参照すると、本発明の実施形態に従ったレーザビーム画像コントラスト増強システムの上面図が例示されている。ユニット100は、レーザ102、画像化装置104、および少なくとも1つの偏光フィルタ106を含んでいる。レーザ102から出力されたレーザビーム108は、マーカ110に、より具体的には、マーカ110の前面に配置されたプレート112に衝突する。レーザビーム108の少なくとも一部分は、プレート112によって反射され、結果の散乱反射114(あるいは、その少なくとも一部分)はユニット100に向かって伝播する。散乱反射114は、偏光フィルタ106を通り過ぎた後で、画像化装置104によって受信され得る。散乱反射114は、散乱反射によって形成されたレーザビーム108の画像を含んでいる。
【0016】
ユニット100は、任意の多様なデバイスあるいは、デバイスの位置決め、および/または方向が関係ある構造を含む。例えば、ユニット100は、車両、機械類、移動デバイス、三脚、あるいは、位置および/または方向を変える能力のある他の複合デバイスを含み得るが、それらには限定されない。レーザ102は、レーザ源、レーザポインタ、クラス2レーザ、望ましいレーザビーム108を達成するためのレーザ源および関連した光学系を含むレーザシステム、あるいは、下に詳細が議論されるように、レーザビーム108を出力できる多様な他のレーザデバイスを含み得るが、それらには限定されない。画像化装置104は、静止画カメラ、ビデオカメラ、デジタルカメラ、あるいは、下に詳細が議論されるように、レーザビームの強度変動を十分に感光する能力のある他の画像捕捉デバイスを含み得るが、それらには限定されない。画像化装置104は、画像スキャンおよびピクセル強度評価を実行するプロセッサを含む。代替として、ユニット100は、画像スキャンおよびピクセル強度評価を実行するための別のプロセッサを含み得る。なおも他の代替として、プロセッサはユニット100から遠隔に配置され得る。
【0017】
フィルタ106は、画像化装置104の前面に(例えば、画像化装置104とプレート112との間に)配置された1つ以上の偏光フィルタ(また、1つまたは複数の偏光フィルタとして参照される)を含む。フィルタ106は、円偏光(C−PL)フィルタあるいは直線偏光(L−PL)フィルタのような単一の偏光フィルタを含み得る。代替として、フィルタ106は、2つ以上の偏光フィルタを含み得、その場合は、画像化装置104に最も近いフィルタは、C−PLフィルタあるいはL−PLフィルタであり得、他のすべてのフィルタがL−PLフィルタ(あるいは複数のフィルタ)であり得る。
【0018】
レーザ102、画像化装置104、および/またはフィルタ106のそれぞれは、ユニット100の外部に、あるいは、それに一体化して配置され得、それらは、ユニット100から取り外し可能な、あるいは、テープ、接着剤、または他の取り付け機構を使用してユニット100に取り付けられる、(安価なレーザポインタおよびデジタルカメラのような)関係のない市販の構成部品であり得る。レーザ102、画像化装置104、および/またはフィルタ106は、安価な構成部品であり得、それらは複合した位置決めおよび/または方向タスクに共通な特徴を欠いている。
【0019】
プレート112は、レーザビーム108を十分に(散乱)反射することができる、金属材料、金属被覆、あるいは他の材料で作られるプレートあるいはマーカを含み得、それらは、反射後にレーザビーム108の偏光を変えないものである(例えば、レーザビーム108と散乱反射114の偏光とが同じ状態のままである)。プレート112の大きさは大きい必要はない。例えば、大きさは、2x4センチメータ(cm)であり得る。プレート112の大きさおよび形状は、プレート112の寸法が、プレート112におけるレーザビーム108の直径よりも大きい限り、変化し得る。代替の実施形態では、マーカ110は、関係あるのは、レーザビーム108とプレート112との間の相互作用であるので、省略され得る。
【0020】
レーザビーム108は、プレート112の面に垂直な線に対して、0度より大きく90度より小さい角度を形成する(これはまた、傾角と言われる)。画像化装置104は、レーザビーム108がプレート112に当たる点あるいは位置が画像化装置104の視野の中に入るように、位置決め/方向付けされる。フィルタ106は、画像化装置104とプレート112との間に配置され、画像化装置104によって受信された画像成分のすべてをフィルタするのに十分である。
【0021】
フィルタ106の方向付けは、それ伝送の主平面が、レーザビーム108の偏光面に(実質的に)平行であるように構成される。フィルタ106を使用して、散乱反射114に関連する画像部分の明るさが不変のままでありながら、画像化装置104によって捉えられた画像の全体の明るさは減少する。画像化装置104によって捉えられた画像の全体の明るさは、フィルタ106なしで捉えられた同じ画像に比べて、2分の1に減少され得る。偏光されていない、あるいは、伝送の主平面に実質的に平行な偏光面を有さない画像成分は、フィルタ106の出力において強度の減少を受ける。
【0022】
図2は、本発明の実施形態に従った様々なフィルタ条件の下での光強度を示すプロット200を例示している。縦軸は、強度を示し、横軸は、フィルタ106の主伝送面と入射ビームの偏光面との間の角度の差を示す。フィルタ106が存在しない場合、強度は、すべての角度に対して一定である(線202)。点線204は、単一偏光フィルタがある場合の、角度差の関数として強度分布を例示している。実線206は、2つの偏光フィルタがある場合の、角度差の関数として強度分散を例示している。1つ以上の偏光フィルタが採用される場合であっても、光強度は、(例えば、ほぼ0度の角度差を有する)フィルタの主伝送面に平行な偏光面を有するフィルタ106を通り過ぎる光に対して、大部分は不変のままである。しかしながら、フィルタ主伝送面に平行でない偏光面を有するフィルタ106を通り過ぎる光に対して、角度差が増加するに従って、光強度は減少する。
【0023】
レーザ102は、クラス2のレーザ源を含み、プレート112が、いくつかの材料および/または色を含むならば、フィルタ106がない場合でも、プレート112に当たるレーザビーム108は、プレート112のない同じシステムに対して1.2倍である強度をもたらす。(単一のフィルタの形式の)プレート112およびフィルタ106が採用される場合、強度は、プレート112およびフィルタ106のないシステムに対して1.5倍に上昇する。(2つのフィルタの形式の)プレート112およびフィルタ106が採用される場合、強度は、プレート112およびフィルタ106のないシステムに対して1.8倍に上昇する。
【0024】
レーザ102に対応する相対強度あるいは相対的明るさ、Irelは、Irel=I/Iscとして定義され、ここで、Iは画像化装置104によって捉えられた画像の散乱反射114の明るさであり、Iscは画像化装置104によって捉えられた画像の平均の明るさである。Iscは、フィルタ106を使用して減少するので、Irelは約1.6−1.8倍に増加する。
【0025】
コントラストのその様な増加は、ユニット100の位置決めを改善する。コントラスト増強は、なんらかの他の物体と向い合っているとき、レーザビーム108がプレート112と衝突する瞬間を判断することを容易にする。プレート112の位置が知られ、レーザビーム108がプレート112に当たる瞬間の検出が容易にされることによって、ユニット100のリアルタイムの位置決めが提供され得る。
【0026】
図3は、本発明に従った、画像コントラルト増強を実装するためのフローダイアグラム300を例示している。ユニット100が、異なる位置(あるいは複数の位置)に動くあるいは動かされるとき、レーザ102は、レーザビーム108を出力し続け、対応する散乱反射114は、フィルタ106を通り過ぎて、画像化装置104によって捉えられる。画像化装置104は、連続的にあるいは周期的に画像を捉える。画像が画像化装置104によって捉えられた(ブロック302)場合、プロセッサは画像スキャンを開始(ブロック304)して、明るさ/強度レベルの閾値より上の強度レベルを有する(複数の)画像ピクセルを識別する。明るさ/強度レベルの閾値は、ユニット100の構成および計画された環境条件に依存して、経験的に見つけられ得る。単一フィルタを有するクラス2レーザ源の上の例を続けて、閾値は、平均画像明るさレベルの1.5倍付近に設定され得る。閾値は、他の光源あるいは画像成分からの散乱反射114を表わす明るさ/強度値を記述するのに十分な、任意の値であり得る。
【0027】
次にブロック306において、画像の第1のピクセルの明るさ/強度値は、プリセットされた明るさ/強度レベルあるいは値の閾値に対して比較される。ピクセル値が閾値の値よりも小さく(分岐308)、かつ、ピクセルが画像の最後のピクセルではない(ブロック310および分岐312)場合、画像の次のピクセルが評価される(ブロック314)。そうではない場合、ピクセル値が閾値の値に等しいか閾値の値より大きい(分岐318)場合、プロセッサは、現在のピクセルが、明るさ/強度値の閾値よりも上の値を有する隣接する領域の一部分であるかを決定する(ブロック320)。
【0028】
ピクセルが隣接する領域の一部分ではない場合(分岐322)、ピクセル値がプレート112に当たっているレーザビーム108を示している可能性が低く、ブロック310および314を介してスキャンが続く。そうでない場合、隣接する領域の一部分であること(分岐324)は、ピクセル値がプレート112に当たっているレーザビーム108を表わしていることに可能性をより高くする。そして、ブロック326において、プロセッサは、高い明るさ/強度レベルの領域がプレート112に当たっているレーザビーム108に対応するのに十分に大きいかを判断する。隣接するピクセルの閾値の数は、散乱反射114のスポットの大きさに基づいて、経験的に決定され得る。
【0029】
隣接するピクセルの数が閾値の数よりも小さい場合(分岐328)、スキャンはブロック310および314を介して継続する。ピクセルの高い明るさ/強度レベルの領域が、プレート112に当たっているレーザビーム108以外の何かに起因するのか、あるいはレーザビーム108がプレートに当たっているが、その状態を確認するためにさらなるピクセルの評価が必要であるか、のいずれかである。一方、隣接するピクセルの数が閾値数よりも上である場合(分岐330)、ピクセル値は、プレート112上で衝突するレーザビーム108を表わしており、ユニット100の位置が知られる(ブロック332)。
【0030】
フローダイアグラム300は画像化装置104によって捉えられる画像のレートおよび処理スピードが適切であるように、連続的にあるいは周期的に繰り返す。いくつかの処理タスクが同時に起こり得ることが理解される。例えば、ブロック306、320、および/または326は、プロセッサが十分な処理能力を保有しているか、あるいはより速い処理の必要性がある場合に、同時に起こり得る。他の例では、ブロック306、320、および/または326は、並行画像スキャンが起きるように、1つ以上のピクセルに対して一度に実行され得る。
【0031】
レーザ認識の容易さは、多様な位置決め、機械制御、あるいは方向問題を解決するために使用され得る。例として、ユニット100と同様なものを装備したユニット400が、図4に示されている。構成部品402は、レーザ源、(複数の)変更フィルタ、および画像化装置を表わす。ユニット400は、さらにグローバル位置決めシステム(GPS)受信器404、あるいは他の位置決めシステムを装備し得る。GPS受信器404は、ユニット400の位置を決定するのに十分であり得る。しかしながら、GPS受信器404単独では、ユニット400の方向を提供するには不十分である。構成部品402と共に、GPS受信器404、および、プレートあるいはマーカ406を採用することによって、ユニット400の方向が決定され得る。角度408、長さ410、および長さ412は、知られるか、あるいは、互いから直接計算され得、それによって、ユニット400の方向を現わす。プレート406の中心とGPS受信器404アンテナ位相中心とによって形成された軸の周りの回転角は、最後の未知の方向変数として残る。
【0032】
他の例では、図5は、コントラスト増強を使用する車両のドッキングを例示している。車両500(あるいは、パレットのような他の動くユニットあるいは移動可能なユニット)は、第1のコントラスト増強構成部品502および第2のコントラスト増強構成部品504を含む。第1のコントラスト増強構成部品502および第2のコントラスト増強構成部品504のそれぞれは、図1に関して議論したように、レーザ源、(複数の)フィルタ、および画像化装置を含む。第1および第2の構成部品502および504は、それらのそれぞれのビーム経路が互いに平行でない(例えば、それぞれのビーム経路が互いに垂直である)ように、車両500上に位置決めされる。従って、車両500の目的領域は、第1および第2の構成部品502および504のビーム経路をそれぞれ交差するように位置決めされた第1のプレート506および第2のプレート508を含む。第1および第2のプレート506、508は、プレート112と同様である。デュアルコントラスト増強機構を使用して、目的領域の車両500の方向に加えて、目的領域からの車両500の進入および離脱が監視され得る。
【0033】
この方法では、移動物体の位置および/または方向は、高品質の画像化装置、レーザ検出器、レーザ源、あるいは広範な計算を必要とせずに、容易に検出され得る。代わりに、安価な構成部品が単純な画像処理と共に使用されて、画像コントラスト増強に基づいて、改良された検出を達成し得る。金属のマーカプレートは1つ以上の偏光フィルタと共に、レーザ源出力に固有の偏光の利点を利用する。レーザ源の出力とは関連しない画像化装置によって受信された画像成分は、レーザ出力に関連する画像成分と比較して、顕著に低い明るさ/強度値を有する。このようにして、存在する場合、他の画像成分から、レーザ出力成分を区別することを容易にする。
【0034】
本発明は、ハードウェア、ソフトウェア、ファームウェア、あるいはそれらの任意の組み合わせを含む任意の適切な形態に実装され得る。本発明の異なる局面が、少なくとも部分的に、1つ以上のデータプロセッサおよび/またはデジタルシグナルプロセッサ上で動作するコンピュータソフトウェアあるいはファームウェアとして実装され得る。本発明の実施形態の要素および構成部品は、物理的に、機能的に、および論理的に、任意の適切な方法で実装され得る。実際、機能性は単一のユニットに、複数のユニットにあるいは他の機能性ユニットの一部分として実装され得る。そのように、本発明は単一ユニットに実装され得るか、あるいは、物理的に、また、機能的に異なるユニットとプロセッサとの間に分散され得る。
【0035】
本発明がいくつかの実施形態との関連で記述されてきたが、本明細書に前述された特定の形式に限定されることは、意図されていない。むしろ、本発明の範囲は、特許請求範囲によってのみ限定される。加えて、特徴が特定の実施形態との関連で記述されて現れているが、記述された実施形態の様々な特徴は、本発明に従って組み合わされ得ることを、当業者は認識するであろう。さらに、実施形態との関連で記述された本発明の局面は、発明として独立し得る。
【0036】
本発明は、特定の実施形態および例示された図によって記述されてきたが、本発明は、記述されたこれらの実施形態あるいは図面に限定されないことを当業者は認識するであろう。1つ以上の実施形態の1つ以上の局面が組み合わされて、さらなる実施形態を形成し得る。提供された図は、単に、表示的であり、また、縮尺通りに描かれてはいないことがあり得る。そのいくつかの比率は、誇張されており、一方、他の部分は縮小されている。図は、当業者によって理解され、また、適切に実施され得る本発明の様々な実装を例示することが意図されている。従って、本発明は、添付の特許請求の範囲と精神内の修正および代替により実行され得る。記述は、網羅的であること、あるいは本発明を正確な形で開示されることに限定することを意図されていない。本発明は、修正と代替により実行され得ることを理解すべきである。上記のことから、本発明の特定の実施形態が例示の目的で本明細書に記述されているが、様々な修正が本発明の精神と範囲から外れることなくなされ得ることは容易に理解されるであろう。従って、本発明は、添付の特許請求範囲およびその均等物による場合を除いて、限定されない。
【0037】
用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な媒体」および同様なものは、概して、例えば、画像スキャンのプロセッサが使用するような、媒体を言うために使用される。コンピュータ読み取り可能な媒体のこれらのおよび他の形式は、特定の動作を実行するための、1つ以上の命令の1つ以上のシーケンスを格納することに含まれる。その様な命令は、概して、(コンピュータプログラムあるいは他のグループにグループ化され得る)「コンピュータプログラムコード」と言われ、実行される場合、システムが、本発明の実施形態の特徴あるいは機能を実行することを可能にする。コードは、プロセッサに特定の動作を直接実行させ、コンパイルされてその動作を行い、および/または、他のソフトウェア、ハードウェア、および/またはファームウェア要素と組み合わされて、その動作を行うことに注意すべきである。
【0038】
さらに、個別にリストされているが、複数の手段、要素、あるいは方法のステップが、例えば、単一ユニットのプロセッサによって実装され得る。加えて、個別の特徴が、異なる特許請求項に含まれているが、有利に組み合わされる可能性があり、また、異なる特許請求項に含まれることは、特徴の組み合わせが実際的でない、および/または有益でないことを意味しない。また、特許請求項の1つのカテゴリの特徴を含むことは、このカテゴリに限定することを意味しないが、むしろ、特徴が、他の特許請求項のカテゴリにも適するとして等しく適用可能であることを意味する。
【符号の説明】
【0039】
100 ユニット
102 レーザ
104 画像化装置
106 偏光フィルタ
108 レーザビーム
110 マーカ
112 プレート
114 散乱反射
【技術分野】
【0001】
(技術分野)
本発明は、画像コントラスト増強に関する。より特定的には、本発明は、位置決めあるいはドッキングアプリケーションのための画像コントラスト増強に関する。
【背景技術】
【0002】
位置決めタスクは、タキメータあるいは電子セオドライトのような、複雑なかつ高価なデバイスを使用して実行され得る。そのような位置決めデバイスは、例えば、デジタルカメラあるいはレーザのような、1つ以上の補助的な測定構成部品を含み得る。デジタルカメラあるいはレーザは、測定目的のために、あるいは注目している領域を監視するために使用され得る。いくつかの場合には、ボードにレーザが搭載されていない場合であっても、(人々のグループにプレゼンテーションする場合に使用されるような)市販のレーザポインタが、位置決めが望まれる物体に取り付けられ得る。
【0003】
レーザを使用する場合、感知あるいは分析のために、あるタイプの受信器が出力されたレーザビームを受信するために必要とされる。特に、レーザと受信器の両方が、位置決めに関係する物体に配置されている場合、デジタルカメラが既知の位置に配置された1つ以上のマーカと共に使用され得る。デジタルカメラは、マーカの画像を捉え、レーザから出力されたレーザビームがマーカ上で衝突する場合、マーカとレーザビームの両方が画像に捉えられ、従って、既知の位置でのレーザビームの検出を提供する。デジタルカメラおよびマーカの使用は、光検出器のような特定のレーザ受信器を必要とせずに、可視レーザビームあるいはレーザスポットの認識を提供する。
【0004】
一般には、全体の複合位置決め/測定デバイスへの補助構成部品として含まれるレーザおよびデジタルカメラは、コストを低く抑えるために、低品質の傾向がある。レーザビームは、低ビーム強度と小さなレーザスポットサイズを有する傾向があり、および/またはデジタルカメラは、不十分な画像処理能力による有意なノイズ成分を有する傾向がある。結果として、レーザビームは、補足された画像上にはほとんど見えないように現われることがあり得、マーカと衝突するレーザビームは検出できないことがあり得る。
【0005】
高品質のレーザビームおよび/またはデジタルカメラが使用される場合であっても、補助的な構成部品か、あるいはスタンドアロンの位置決めデバイスのいずれかとして、マーカ部でのレーザビームの存在を正確に検出するために、洗練された画像処理が必要とされ得る。これは、周囲の照明が強いか、あるいは他の干渉効果がある場合であり得る。
【発明の概要】
【発明が解決しようとする課題】
【0006】
従って、位置決めマーカの場所でレーザビームを検出するためのシンプルで安価な方法およびシステムの提供は有益であろう。安価な、および/または低品質のレーザ源、および/または画像化装置を使用する場合であっても、正確なレーザ検出の提供は有益であろう。標準的な画像スキャンを使用する画像コントラスト増強方法を提供することは有益であろう。追加の信号処理を必要とせずに正確な位置検出を提供することは有益であろう。シンプルで安価な位置決め、方向付け、あるいはマシン制御機構を提供することは有益であろう。
【課題を解決するための手段】
【0007】
本発明の1つの実施形態では、位置あるいは方向決定のための移動物体が装備される。移動物体は、レーザビームを出力するレーザ源と、レーザビームの反射を入力として受信するように動作可能な偏光フィルタとを含む。移動物体は、偏光フィルタの出力を受信するように動作可能な画像化装置をさらに含む。レーザビームが、所定の位置に配置された金属のマーカプレートと衝突する場合、偏光フィルタは、レーザビームの反射に関連する画像成分の強度レベルを仮想的に不変に保ちながら、反射に関連していない画像成分の強度レベルを減少する。画像化装置は、そのようなフィルタされた画像成分を使用して、レーザビームがマーカプレートと衝突する瞬間を判断する。マーカプレートの位置は既知であるので、マーカプレートと衝突するレーザビームの検出は、対象区域近傍における移動物体の存在を表わす。従って、移動物体の位置および/または方向が決定され得る。
【0008】
本発明の他の実施形態では、移動ユニットの位置あるいは方向を決定するための方法が提供される。方法は、移動ユニットに含まれるレーザからのレーザビームを提供することと、画像化装置において画像を受信することとを含む。方法は、画像化装置の前にフィルタを提供することと、閾値強度レベル以上にある画像を含むピクセルを識別することとをさらに含む。閾値強度レベル以上にある十分な数の隣接するピクセルは、レーザビームの反射を表わす。
【0009】
本発明の他の特徴および局面が、例示により、本発明の実施形態に従った特徴を例示している添付の図面と共に取られた、以下の詳細な記述から明らかになるであろう。本発明の概要が、本発明の範囲を限定する意図はなく、本発明は、本明細書に添付の特許請求範囲によって規定される。
【0010】
本発明は、さらに以下の手段を提供する。
(項目1)
位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、
レーザビームを出力するレーザ源と、
該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、
該偏光フィルタの出力を受信するように動作可能な画像化装置と
を含む、移動物体。
(項目2)
画像スキャンを実行するための、前記画像化装置と通信するプロセッサをさらに含む、上記項目に記載の移動物体。
(項目3)
前記レーザビームの前記反射は、所定の位置に配置された金属マーカによって起こされており、該反射は、散乱反射を含む、上記項目のいずれか一項に記載の移動物体。
(項目4)
前記偏光フィルタは、円偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目5)
前記偏光フィルタは、直線偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目6)
前記偏光フィルタは、直線偏光フィルタおよび第2の偏光フィルタを含む、上記項目のいずれか一項に記載の移動物体。
(項目7)
前記偏光フィルタの伝送の主平面は、前記レーザビームの偏光面に実質的に平行である、上記項目のいずれか一項に記載の移動物体。
(項目8)
前記画像化装置は、デジタルカメラを含む、上記項目のいずれか一項に記載の移動物体。
(項目9)
前記画像化装置は、捉えられた画像の隣接する、閾値強度レベル以上のピクセルを識別するように動作可能である、上記項目のいずれか一項に記載の移動物体。
(項目10)
捉えられた画像内の前記レーザビームの前記反射に関連するピクセルは、該捉えられた画像の残りの部分に関連した強度レベルに等しいかまたはそれより大きい強度レベルを有する、上記項目のいずれか一項に記載の移動物体。
(項目11)
移動ユニットの位置あるいは方向を決定する方法であって、該方法は、
該移動ユニットに含まれるレーザからのレーザビームを提供することと、
画像化装置において、画像を受信することと、
該画像化装置の前面にフィルタを提供することと、
閾値強度レベルに等しいかまたはそれより大きい該画像を含むピクセルを識別することであって、閾値強度レベル以上である該ピクセルは、該レーザビームの反射を表わす、ことと
を含む、方法。
(項目12)
所定の位置に金属ターゲットを提供することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目13)
前記金属ターゲットと衝突する前記レーザビームから該レーザビームの前記反射を発生することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目14)
前記フィルタは、1つ以上の偏光フィルタを含む、上記項目のいずれか一項に記載の方法。
(項目15)
前記フィルタを提供することは、前記レーザビームの偏光面に実質的に平行な該フィルタの伝送の主平面を方向付けすることを含む、上記項目のいずれか一項に記載の方法。
(項目16)
閾値強度レベル以上の前記ピクセルの近接を決定することをさらに含む、上記項目のいずれか一項に記載の方法。
(項目17)
レーザコントラスト増強のためのシステムであって、該システムは、
所定の位置に位置決めされたターゲットと、
移動ユニットと
を含み、該移動ユニットは、
ビームを出力するレーザと、
画像を捉えるように動作可能な画像化装置と、
該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタと
を含む
システム。
(項目18)
前記ビームは前記ターゲットと衝突して、散乱反射を発生し、該散乱反射は、前記画像化装置によって捉えられた画像内に含まれる、上記項目のいずれか一項に記載のシステム。
(項目19)
前記移動ユニットは、前記ターゲットへの見通し線の中にあり、前記ビームが該ターゲット上に衝突するように方向付けされている、上記項目のいずれか一項に記載のシステム。
(項目20)
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルを決定するように構成されたプロセッサをさらに含む、上記項目のいずれか一項に記載のシステム。
(項目21)
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルの領域を決定するように構成されたプロセッサをさらに含む、上記項目のいずれか一項に記載のシステム。
(項目22)
前記移動ユニットに含まれるグローバル位置決めシステム(GPS)をさらに含むことにより、該移動ユニットの方向を決定する、上記項目のいずれか一項に記載のシステム。
(摘要)
画像コントラスト増強を提供する装置および方法が開示されている。移動物体は、レーザ源、偏光フィルタ、および画像化装置を備えている。レーザ源出力の反射は、フィルタを通り過ぎ、画像化装置によって受信される。レーザ源の出力が所定の位置に配置された金属マーカプレートと衝突する場合、フィルタは、レーザ源出力の反射に関連しない画像成分の強度レベルを減少する。画像化装置は、そのようなフィルタされた画像成分を使用して、移動物体の位置および/または方向を決定する。
【図面の簡単な説明】
【0011】
例示の実施形態は、添付の図面と共にとられた、以下の詳細な記述からより完全に理解されるであろう。同様な参照数値は同様な要素を示す。
【図1】図1は、本発明の実施形態に従った画像コントラスト増強システムの上面図を例示している。
【図2】図2は、本発明の実施形態に従った、異なるフィルタを使用している光強度を示すプロットを例示している。
【図3】図3は、本発明の実施形態に従った画像コントラスト増強を実装するフローダイアグラムを例示している。
【図4】図4は、本発明の実施形態に従ったユニットの方向を決定するための図式を例示している。
【図5】図5は、本発明の実施形態に従ったユニットの進入あるいは離脱を判断するための図式を例示している。
【0012】
本明細書に提供された表題は、利便性のみのためであり、本請求された発明の範囲あるいは意味に必ずしも影響を与えるものではない。
【発明を実施するための形態】
【0013】
下の詳細な記述は、画像コントラスト増強を提供する装置および方法である。動くあるいは移動物体には、レーザ源、偏光フィルタ、および画像化装置が装備される。レーザ源出力の反射は、フィルタを通り過ぎて、画像化装置によって受信される。レーザ源の出力が、所定の位置に配置された金属マーカプレートと衝突する場合、画像化装置によって受信された画像は、反射に関連する画像成分を含んでおり、該画像成分は、フィルタを通り過ぎた後では、明るさではほとんどの部分では不変であるが、フィルタを通り過ぎた後では、残りの画像成分はより低い明るさになる。それ故に、レーザ源出力が金属マーカプレートに当たる瞬間の判断が起こり得る。そのような判断は、移動している物体の位置および/または方向が知られることを可能にする。
【0014】
以下の記述は、本発明の実施形態の全体の理解のために、および本発明の実施形態の記述を可能にするために特定の詳細を提供する。しかしながら、当業者は、本発明がこれらの詳細がなくても実施され得ることを理解するであろう。他の例では、周知の構造および機能は、本発明の実施形態の記述が必要以上にあいまいになることを避けるために、詳細には示されていないか、あるいは記述されていない。
【0015】
図1を参照すると、本発明の実施形態に従ったレーザビーム画像コントラスト増強システムの上面図が例示されている。ユニット100は、レーザ102、画像化装置104、および少なくとも1つの偏光フィルタ106を含んでいる。レーザ102から出力されたレーザビーム108は、マーカ110に、より具体的には、マーカ110の前面に配置されたプレート112に衝突する。レーザビーム108の少なくとも一部分は、プレート112によって反射され、結果の散乱反射114(あるいは、その少なくとも一部分)はユニット100に向かって伝播する。散乱反射114は、偏光フィルタ106を通り過ぎた後で、画像化装置104によって受信され得る。散乱反射114は、散乱反射によって形成されたレーザビーム108の画像を含んでいる。
【0016】
ユニット100は、任意の多様なデバイスあるいは、デバイスの位置決め、および/または方向が関係ある構造を含む。例えば、ユニット100は、車両、機械類、移動デバイス、三脚、あるいは、位置および/または方向を変える能力のある他の複合デバイスを含み得るが、それらには限定されない。レーザ102は、レーザ源、レーザポインタ、クラス2レーザ、望ましいレーザビーム108を達成するためのレーザ源および関連した光学系を含むレーザシステム、あるいは、下に詳細が議論されるように、レーザビーム108を出力できる多様な他のレーザデバイスを含み得るが、それらには限定されない。画像化装置104は、静止画カメラ、ビデオカメラ、デジタルカメラ、あるいは、下に詳細が議論されるように、レーザビームの強度変動を十分に感光する能力のある他の画像捕捉デバイスを含み得るが、それらには限定されない。画像化装置104は、画像スキャンおよびピクセル強度評価を実行するプロセッサを含む。代替として、ユニット100は、画像スキャンおよびピクセル強度評価を実行するための別のプロセッサを含み得る。なおも他の代替として、プロセッサはユニット100から遠隔に配置され得る。
【0017】
フィルタ106は、画像化装置104の前面に(例えば、画像化装置104とプレート112との間に)配置された1つ以上の偏光フィルタ(また、1つまたは複数の偏光フィルタとして参照される)を含む。フィルタ106は、円偏光(C−PL)フィルタあるいは直線偏光(L−PL)フィルタのような単一の偏光フィルタを含み得る。代替として、フィルタ106は、2つ以上の偏光フィルタを含み得、その場合は、画像化装置104に最も近いフィルタは、C−PLフィルタあるいはL−PLフィルタであり得、他のすべてのフィルタがL−PLフィルタ(あるいは複数のフィルタ)であり得る。
【0018】
レーザ102、画像化装置104、および/またはフィルタ106のそれぞれは、ユニット100の外部に、あるいは、それに一体化して配置され得、それらは、ユニット100から取り外し可能な、あるいは、テープ、接着剤、または他の取り付け機構を使用してユニット100に取り付けられる、(安価なレーザポインタおよびデジタルカメラのような)関係のない市販の構成部品であり得る。レーザ102、画像化装置104、および/またはフィルタ106は、安価な構成部品であり得、それらは複合した位置決めおよび/または方向タスクに共通な特徴を欠いている。
【0019】
プレート112は、レーザビーム108を十分に(散乱)反射することができる、金属材料、金属被覆、あるいは他の材料で作られるプレートあるいはマーカを含み得、それらは、反射後にレーザビーム108の偏光を変えないものである(例えば、レーザビーム108と散乱反射114の偏光とが同じ状態のままである)。プレート112の大きさは大きい必要はない。例えば、大きさは、2x4センチメータ(cm)であり得る。プレート112の大きさおよび形状は、プレート112の寸法が、プレート112におけるレーザビーム108の直径よりも大きい限り、変化し得る。代替の実施形態では、マーカ110は、関係あるのは、レーザビーム108とプレート112との間の相互作用であるので、省略され得る。
【0020】
レーザビーム108は、プレート112の面に垂直な線に対して、0度より大きく90度より小さい角度を形成する(これはまた、傾角と言われる)。画像化装置104は、レーザビーム108がプレート112に当たる点あるいは位置が画像化装置104の視野の中に入るように、位置決め/方向付けされる。フィルタ106は、画像化装置104とプレート112との間に配置され、画像化装置104によって受信された画像成分のすべてをフィルタするのに十分である。
【0021】
フィルタ106の方向付けは、それ伝送の主平面が、レーザビーム108の偏光面に(実質的に)平行であるように構成される。フィルタ106を使用して、散乱反射114に関連する画像部分の明るさが不変のままでありながら、画像化装置104によって捉えられた画像の全体の明るさは減少する。画像化装置104によって捉えられた画像の全体の明るさは、フィルタ106なしで捉えられた同じ画像に比べて、2分の1に減少され得る。偏光されていない、あるいは、伝送の主平面に実質的に平行な偏光面を有さない画像成分は、フィルタ106の出力において強度の減少を受ける。
【0022】
図2は、本発明の実施形態に従った様々なフィルタ条件の下での光強度を示すプロット200を例示している。縦軸は、強度を示し、横軸は、フィルタ106の主伝送面と入射ビームの偏光面との間の角度の差を示す。フィルタ106が存在しない場合、強度は、すべての角度に対して一定である(線202)。点線204は、単一偏光フィルタがある場合の、角度差の関数として強度分布を例示している。実線206は、2つの偏光フィルタがある場合の、角度差の関数として強度分散を例示している。1つ以上の偏光フィルタが採用される場合であっても、光強度は、(例えば、ほぼ0度の角度差を有する)フィルタの主伝送面に平行な偏光面を有するフィルタ106を通り過ぎる光に対して、大部分は不変のままである。しかしながら、フィルタ主伝送面に平行でない偏光面を有するフィルタ106を通り過ぎる光に対して、角度差が増加するに従って、光強度は減少する。
【0023】
レーザ102は、クラス2のレーザ源を含み、プレート112が、いくつかの材料および/または色を含むならば、フィルタ106がない場合でも、プレート112に当たるレーザビーム108は、プレート112のない同じシステムに対して1.2倍である強度をもたらす。(単一のフィルタの形式の)プレート112およびフィルタ106が採用される場合、強度は、プレート112およびフィルタ106のないシステムに対して1.5倍に上昇する。(2つのフィルタの形式の)プレート112およびフィルタ106が採用される場合、強度は、プレート112およびフィルタ106のないシステムに対して1.8倍に上昇する。
【0024】
レーザ102に対応する相対強度あるいは相対的明るさ、Irelは、Irel=I/Iscとして定義され、ここで、Iは画像化装置104によって捉えられた画像の散乱反射114の明るさであり、Iscは画像化装置104によって捉えられた画像の平均の明るさである。Iscは、フィルタ106を使用して減少するので、Irelは約1.6−1.8倍に増加する。
【0025】
コントラストのその様な増加は、ユニット100の位置決めを改善する。コントラスト増強は、なんらかの他の物体と向い合っているとき、レーザビーム108がプレート112と衝突する瞬間を判断することを容易にする。プレート112の位置が知られ、レーザビーム108がプレート112に当たる瞬間の検出が容易にされることによって、ユニット100のリアルタイムの位置決めが提供され得る。
【0026】
図3は、本発明に従った、画像コントラルト増強を実装するためのフローダイアグラム300を例示している。ユニット100が、異なる位置(あるいは複数の位置)に動くあるいは動かされるとき、レーザ102は、レーザビーム108を出力し続け、対応する散乱反射114は、フィルタ106を通り過ぎて、画像化装置104によって捉えられる。画像化装置104は、連続的にあるいは周期的に画像を捉える。画像が画像化装置104によって捉えられた(ブロック302)場合、プロセッサは画像スキャンを開始(ブロック304)して、明るさ/強度レベルの閾値より上の強度レベルを有する(複数の)画像ピクセルを識別する。明るさ/強度レベルの閾値は、ユニット100の構成および計画された環境条件に依存して、経験的に見つけられ得る。単一フィルタを有するクラス2レーザ源の上の例を続けて、閾値は、平均画像明るさレベルの1.5倍付近に設定され得る。閾値は、他の光源あるいは画像成分からの散乱反射114を表わす明るさ/強度値を記述するのに十分な、任意の値であり得る。
【0027】
次にブロック306において、画像の第1のピクセルの明るさ/強度値は、プリセットされた明るさ/強度レベルあるいは値の閾値に対して比較される。ピクセル値が閾値の値よりも小さく(分岐308)、かつ、ピクセルが画像の最後のピクセルではない(ブロック310および分岐312)場合、画像の次のピクセルが評価される(ブロック314)。そうではない場合、ピクセル値が閾値の値に等しいか閾値の値より大きい(分岐318)場合、プロセッサは、現在のピクセルが、明るさ/強度値の閾値よりも上の値を有する隣接する領域の一部分であるかを決定する(ブロック320)。
【0028】
ピクセルが隣接する領域の一部分ではない場合(分岐322)、ピクセル値がプレート112に当たっているレーザビーム108を示している可能性が低く、ブロック310および314を介してスキャンが続く。そうでない場合、隣接する領域の一部分であること(分岐324)は、ピクセル値がプレート112に当たっているレーザビーム108を表わしていることに可能性をより高くする。そして、ブロック326において、プロセッサは、高い明るさ/強度レベルの領域がプレート112に当たっているレーザビーム108に対応するのに十分に大きいかを判断する。隣接するピクセルの閾値の数は、散乱反射114のスポットの大きさに基づいて、経験的に決定され得る。
【0029】
隣接するピクセルの数が閾値の数よりも小さい場合(分岐328)、スキャンはブロック310および314を介して継続する。ピクセルの高い明るさ/強度レベルの領域が、プレート112に当たっているレーザビーム108以外の何かに起因するのか、あるいはレーザビーム108がプレートに当たっているが、その状態を確認するためにさらなるピクセルの評価が必要であるか、のいずれかである。一方、隣接するピクセルの数が閾値数よりも上である場合(分岐330)、ピクセル値は、プレート112上で衝突するレーザビーム108を表わしており、ユニット100の位置が知られる(ブロック332)。
【0030】
フローダイアグラム300は画像化装置104によって捉えられる画像のレートおよび処理スピードが適切であるように、連続的にあるいは周期的に繰り返す。いくつかの処理タスクが同時に起こり得ることが理解される。例えば、ブロック306、320、および/または326は、プロセッサが十分な処理能力を保有しているか、あるいはより速い処理の必要性がある場合に、同時に起こり得る。他の例では、ブロック306、320、および/または326は、並行画像スキャンが起きるように、1つ以上のピクセルに対して一度に実行され得る。
【0031】
レーザ認識の容易さは、多様な位置決め、機械制御、あるいは方向問題を解決するために使用され得る。例として、ユニット100と同様なものを装備したユニット400が、図4に示されている。構成部品402は、レーザ源、(複数の)変更フィルタ、および画像化装置を表わす。ユニット400は、さらにグローバル位置決めシステム(GPS)受信器404、あるいは他の位置決めシステムを装備し得る。GPS受信器404は、ユニット400の位置を決定するのに十分であり得る。しかしながら、GPS受信器404単独では、ユニット400の方向を提供するには不十分である。構成部品402と共に、GPS受信器404、および、プレートあるいはマーカ406を採用することによって、ユニット400の方向が決定され得る。角度408、長さ410、および長さ412は、知られるか、あるいは、互いから直接計算され得、それによって、ユニット400の方向を現わす。プレート406の中心とGPS受信器404アンテナ位相中心とによって形成された軸の周りの回転角は、最後の未知の方向変数として残る。
【0032】
他の例では、図5は、コントラスト増強を使用する車両のドッキングを例示している。車両500(あるいは、パレットのような他の動くユニットあるいは移動可能なユニット)は、第1のコントラスト増強構成部品502および第2のコントラスト増強構成部品504を含む。第1のコントラスト増強構成部品502および第2のコントラスト増強構成部品504のそれぞれは、図1に関して議論したように、レーザ源、(複数の)フィルタ、および画像化装置を含む。第1および第2の構成部品502および504は、それらのそれぞれのビーム経路が互いに平行でない(例えば、それぞれのビーム経路が互いに垂直である)ように、車両500上に位置決めされる。従って、車両500の目的領域は、第1および第2の構成部品502および504のビーム経路をそれぞれ交差するように位置決めされた第1のプレート506および第2のプレート508を含む。第1および第2のプレート506、508は、プレート112と同様である。デュアルコントラスト増強機構を使用して、目的領域の車両500の方向に加えて、目的領域からの車両500の進入および離脱が監視され得る。
【0033】
この方法では、移動物体の位置および/または方向は、高品質の画像化装置、レーザ検出器、レーザ源、あるいは広範な計算を必要とせずに、容易に検出され得る。代わりに、安価な構成部品が単純な画像処理と共に使用されて、画像コントラスト増強に基づいて、改良された検出を達成し得る。金属のマーカプレートは1つ以上の偏光フィルタと共に、レーザ源出力に固有の偏光の利点を利用する。レーザ源の出力とは関連しない画像化装置によって受信された画像成分は、レーザ出力に関連する画像成分と比較して、顕著に低い明るさ/強度値を有する。このようにして、存在する場合、他の画像成分から、レーザ出力成分を区別することを容易にする。
【0034】
本発明は、ハードウェア、ソフトウェア、ファームウェア、あるいはそれらの任意の組み合わせを含む任意の適切な形態に実装され得る。本発明の異なる局面が、少なくとも部分的に、1つ以上のデータプロセッサおよび/またはデジタルシグナルプロセッサ上で動作するコンピュータソフトウェアあるいはファームウェアとして実装され得る。本発明の実施形態の要素および構成部品は、物理的に、機能的に、および論理的に、任意の適切な方法で実装され得る。実際、機能性は単一のユニットに、複数のユニットにあるいは他の機能性ユニットの一部分として実装され得る。そのように、本発明は単一ユニットに実装され得るか、あるいは、物理的に、また、機能的に異なるユニットとプロセッサとの間に分散され得る。
【0035】
本発明がいくつかの実施形態との関連で記述されてきたが、本明細書に前述された特定の形式に限定されることは、意図されていない。むしろ、本発明の範囲は、特許請求範囲によってのみ限定される。加えて、特徴が特定の実施形態との関連で記述されて現れているが、記述された実施形態の様々な特徴は、本発明に従って組み合わされ得ることを、当業者は認識するであろう。さらに、実施形態との関連で記述された本発明の局面は、発明として独立し得る。
【0036】
本発明は、特定の実施形態および例示された図によって記述されてきたが、本発明は、記述されたこれらの実施形態あるいは図面に限定されないことを当業者は認識するであろう。1つ以上の実施形態の1つ以上の局面が組み合わされて、さらなる実施形態を形成し得る。提供された図は、単に、表示的であり、また、縮尺通りに描かれてはいないことがあり得る。そのいくつかの比率は、誇張されており、一方、他の部分は縮小されている。図は、当業者によって理解され、また、適切に実施され得る本発明の様々な実装を例示することが意図されている。従って、本発明は、添付の特許請求の範囲と精神内の修正および代替により実行され得る。記述は、網羅的であること、あるいは本発明を正確な形で開示されることに限定することを意図されていない。本発明は、修正と代替により実行され得ることを理解すべきである。上記のことから、本発明の特定の実施形態が例示の目的で本明細書に記述されているが、様々な修正が本発明の精神と範囲から外れることなくなされ得ることは容易に理解されるであろう。従って、本発明は、添付の特許請求範囲およびその均等物による場合を除いて、限定されない。
【0037】
用語「コンピュータプログラム製品」、「コンピュータ読み取り可能な媒体」および同様なものは、概して、例えば、画像スキャンのプロセッサが使用するような、媒体を言うために使用される。コンピュータ読み取り可能な媒体のこれらのおよび他の形式は、特定の動作を実行するための、1つ以上の命令の1つ以上のシーケンスを格納することに含まれる。その様な命令は、概して、(コンピュータプログラムあるいは他のグループにグループ化され得る)「コンピュータプログラムコード」と言われ、実行される場合、システムが、本発明の実施形態の特徴あるいは機能を実行することを可能にする。コードは、プロセッサに特定の動作を直接実行させ、コンパイルされてその動作を行い、および/または、他のソフトウェア、ハードウェア、および/またはファームウェア要素と組み合わされて、その動作を行うことに注意すべきである。
【0038】
さらに、個別にリストされているが、複数の手段、要素、あるいは方法のステップが、例えば、単一ユニットのプロセッサによって実装され得る。加えて、個別の特徴が、異なる特許請求項に含まれているが、有利に組み合わされる可能性があり、また、異なる特許請求項に含まれることは、特徴の組み合わせが実際的でない、および/または有益でないことを意味しない。また、特許請求項の1つのカテゴリの特徴を含むことは、このカテゴリに限定することを意味しないが、むしろ、特徴が、他の特許請求項のカテゴリにも適するとして等しく適用可能であることを意味する。
【符号の説明】
【0039】
100 ユニット
102 レーザ
104 画像化装置
106 偏光フィルタ
108 レーザビーム
110 マーカ
112 プレート
114 散乱反射
【特許請求の範囲】
【請求項1】
位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、
レーザビームを出力するレーザ源と、
該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、
該偏光フィルタの出力を受信するように動作可能な画像化装置と
を含む、移動物体。
【請求項2】
画像スキャンを実行するための、前記画像化装置と通信するプロセッサをさらに含む、請求項1に記載の移動物体。
【請求項3】
前記レーザビームの前記反射は、所定の位置に配置された金属マーカによって起こされており、該反射は、散乱反射を含む、請求項1に記載の移動物体。
【請求項4】
前記偏光フィルタは、円偏光フィルタを含む、請求項1に記載の移動物体。
【請求項5】
前記偏光フィルタは、直線偏光フィルタを含む、請求項1に記載の移動物体。
【請求項6】
前記偏光フィルタは、直線偏光フィルタおよび第2の偏光フィルタを含む、請求項1に記載の移動物体。
【請求項7】
前記偏光フィルタの伝送の主平面は、前記レーザビームの偏光面に実質的に平行である、請求項1に記載の移動物体。
【請求項8】
前記画像化装置は、デジタルカメラを含む、請求項1に記載の移動物体。
【請求項9】
前記画像化装置は、捉えられた画像の隣接する、閾値強度レベル以上のピクセルを識別するように動作可能である、請求項1に記載の移動物体。
【請求項10】
捉えられた画像内の前記レーザビームの前記反射に関連するピクセルは、該捉えられた画像の残りの部分に関連した強度レベルに等しいかまたはそれより大きい強度レベルを有する、請求項1に記載の移動物体。
【請求項11】
移動ユニットの位置あるいは方向を決定する方法であって、該方法は、
該移動ユニットに含まれるレーザからのレーザビームを提供することと、
画像化装置において、画像を受信することと、
該画像化装置の前面にフィルタを提供することと、
閾値強度レベルに等しいかまたはそれより大きい該画像を含むピクセルを識別することであって、閾値強度レベル以上である該ピクセルは、該レーザビームの反射を表わす、ことと
を含む、方法。
【請求項12】
所定の位置に金属ターゲットを提供することをさらに含む、請求項11に記載の方法。
【請求項13】
前記金属ターゲットと衝突する前記レーザビームから該レーザビームの前記反射を発生することをさらに含む、請求項12に記載の方法。
【請求項14】
前記フィルタは、1つ以上の偏光フィルタを含む、請求項11に記載の方法。
【請求項15】
前記フィルタを提供することは、前記レーザビームの偏光面に実質的に平行な該フィルタの伝送の主平面を方向付けすることを含む、請求項11に記載の方法。
【請求項16】
閾値強度レベル以上の前記ピクセルの近接を判断することをさらに含む、請求項11に記載の方法。
【請求項17】
レーザコントラスト増強のためのシステムであって、該システムは、
所定の位置に位置決めされたターゲットと、
移動ユニットと
を含み、該移動ユニットは、
ビームを出力するレーザと、
画像を捉えるように動作可能な画像化装置と、
該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタと
を含む
システム。
【請求項18】
前記ビームは前記ターゲットと衝突して、散乱反射を発生し、該散乱反射は、前記画像化装置によって捉えられた画像内に含まれる、請求項17に記載のシステム。
【請求項19】
前記移動ユニットは、前記ターゲットへの見通し線の中にあり、前記ビームが該ターゲット上に衝突するように方向付けされている、請求項18に記載のシステム。
【請求項20】
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルを決定するように構成されたプロセッサをさらに含む、請求項17に記載のシステム。
【請求項21】
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルの領域を決定するように構成されたプロセッサをさらに含む、請求項17に記載のシステム。
【請求項22】
前記移動ユニットに含まれるグローバル位置決めシステム(GPS)をさらに含むことにより、該移動ユニットの方向を決定する、請求項17に記載のシステム。
【請求項1】
位置あるいは方向を決定するように装備された移動物体であって、該移動物体は、
レーザビームを出力するレーザ源と、
該レーザビームの反射を、入力として受信するように動作可能な偏光フィルタと、
該偏光フィルタの出力を受信するように動作可能な画像化装置と
を含む、移動物体。
【請求項2】
画像スキャンを実行するための、前記画像化装置と通信するプロセッサをさらに含む、請求項1に記載の移動物体。
【請求項3】
前記レーザビームの前記反射は、所定の位置に配置された金属マーカによって起こされており、該反射は、散乱反射を含む、請求項1に記載の移動物体。
【請求項4】
前記偏光フィルタは、円偏光フィルタを含む、請求項1に記載の移動物体。
【請求項5】
前記偏光フィルタは、直線偏光フィルタを含む、請求項1に記載の移動物体。
【請求項6】
前記偏光フィルタは、直線偏光フィルタおよび第2の偏光フィルタを含む、請求項1に記載の移動物体。
【請求項7】
前記偏光フィルタの伝送の主平面は、前記レーザビームの偏光面に実質的に平行である、請求項1に記載の移動物体。
【請求項8】
前記画像化装置は、デジタルカメラを含む、請求項1に記載の移動物体。
【請求項9】
前記画像化装置は、捉えられた画像の隣接する、閾値強度レベル以上のピクセルを識別するように動作可能である、請求項1に記載の移動物体。
【請求項10】
捉えられた画像内の前記レーザビームの前記反射に関連するピクセルは、該捉えられた画像の残りの部分に関連した強度レベルに等しいかまたはそれより大きい強度レベルを有する、請求項1に記載の移動物体。
【請求項11】
移動ユニットの位置あるいは方向を決定する方法であって、該方法は、
該移動ユニットに含まれるレーザからのレーザビームを提供することと、
画像化装置において、画像を受信することと、
該画像化装置の前面にフィルタを提供することと、
閾値強度レベルに等しいかまたはそれより大きい該画像を含むピクセルを識別することであって、閾値強度レベル以上である該ピクセルは、該レーザビームの反射を表わす、ことと
を含む、方法。
【請求項12】
所定の位置に金属ターゲットを提供することをさらに含む、請求項11に記載の方法。
【請求項13】
前記金属ターゲットと衝突する前記レーザビームから該レーザビームの前記反射を発生することをさらに含む、請求項12に記載の方法。
【請求項14】
前記フィルタは、1つ以上の偏光フィルタを含む、請求項11に記載の方法。
【請求項15】
前記フィルタを提供することは、前記レーザビームの偏光面に実質的に平行な該フィルタの伝送の主平面を方向付けすることを含む、請求項11に記載の方法。
【請求項16】
閾値強度レベル以上の前記ピクセルの近接を判断することをさらに含む、請求項11に記載の方法。
【請求項17】
レーザコントラスト増強のためのシステムであって、該システムは、
所定の位置に位置決めされたターゲットと、
移動ユニットと
を含み、該移動ユニットは、
ビームを出力するレーザと、
画像を捉えるように動作可能な画像化装置と、
該画像化装置の前面に配置された偏光フィルタであって、該偏光フィルタの伝送の主平面に実質的に平行な偏光面を有さない入射画像成分の強度を減少するように動作可能である、偏光フィルタと
を含む
システム。
【請求項18】
前記ビームは前記ターゲットと衝突して、散乱反射を発生し、該散乱反射は、前記画像化装置によって捉えられた画像内に含まれる、請求項17に記載のシステム。
【請求項19】
前記移動ユニットは、前記ターゲットへの見通し線の中にあり、前記ビームが該ターゲット上に衝突するように方向付けされている、請求項18に記載のシステム。
【請求項20】
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルを決定するように構成されたプロセッサをさらに含む、請求項17に記載のシステム。
【請求項21】
閾値の値に等しいかまたはそれより大きい強度値を有する前記捉えられた画像を含むピクセルの領域を決定するように構成されたプロセッサをさらに含む、請求項17に記載のシステム。
【請求項22】
前記移動ユニットに含まれるグローバル位置決めシステム(GPS)をさらに含むことにより、該移動ユニットの方向を決定する、請求項17に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−249818(P2010−249818A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2010−92649(P2010−92649)
【出願日】平成22年4月13日(2010.4.13)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成22年4月13日(2010.4.13)
【出願人】(510001320)ジャバド ジーエヌエスエス, インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]