
レーザレーダシステム、レーザ測距装置および制御装置
【課題】広視野な受信系においてクロストークによる誤りを回避する。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
【解決手段】レーザ測距装置1,2は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段(レーザ装置11、変調器12およびスキャナ13)と、対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段(受信レンズ15および受光器16)と、電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出装置17とを備え、制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーザ光の発振時間と反射光の受光時間との差から距離を導出するレーザ距離測定法を用いたレーザレーダシステム、レーザ測距装置および制御装置に関するものである。
【背景技術】
【0002】
従来技術のレーザ測距装置では、レーザ光を走査して照射し、レーザ走査範囲における対象物の多点からの散乱光を単素子の受光器により受信し、レーザ光の照射から受信までの時間を計測することで、対象物までの測距を行っている。さらに、レーザ走査角度および測距結果から3次元画像を取得している(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−271275号公報
【非特許文献】
【0004】
【非特許文献1】平井他、「パルス方式3D Imaging LADARの開発」、第27回レーザセンシングシンポジウム予稿集、pp.90−91,2009
【発明の概要】
【発明が解決しようとする課題】
【0005】
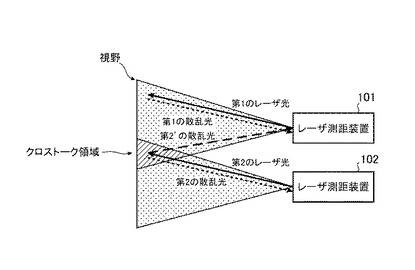
しかしながら、特許文献1に開示された従来技術において、図15に示すように、上記レーザ測距装置101,102を複数台配置して隙間なく広範囲な空間の3次元画像を取得する場合、各レーザ測距装置101,102の視野(レーザ光の照射方向)が重なる場合がある。
【0006】
この場合、例えば、レーザ測距装置102によるレーザ光(第2のレーザ光)に対する第2’の散乱光が、レーザ測距装置101により受信されてしまうというクロストークと呼ばれる現象が発生する。これにより、レーザ測距装置101では誤った測距結果を出力してしまうという課題があった。
【0007】
この発明は、上記のような課題を解決するためになされたもので、広視野な受信系においてクロストークによる誤りを回避することができるレーザレーダシステム、レーザ測距装置および制御装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
この発明に係るレーザレーダシステムは、対象物の測距を行う複数のレーザ測距装置と、各レーザ測距装置を制御する制御装置とを備え、レーザ測距装置は、制御装置による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段と、レーザ光送信手段により走査されたレーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、散乱光受信手段により変換された電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出手段とを備え、制御装置は、各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させるものである。
【発明の効果】
【0009】
この発明によれば、上記のように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るレーザレーダシステムの全体構成を示す図である。
【図2】この発明の実施の形態1におけるレーザ測距装置の構成を示す図である。
【図3】この発明の実施の形態1に係るレーザレーダシステムの動作を示すフローチャートである。
【図4】この発明の実施の形態1に係るレーザレーダシステムによるパルス変調タイミングを示す図である。
【図5】この発明の実施の形態1に係るレーザレーダシステムによるパルス変調の繰り返し周期を示す図である。
【図6】この発明の実施の形態2に係るレーザレーダシステムの全体構成を示す図である。
【図7】この発明の実施の形態2におけるレーザ測距装置の構成を示す図である。
【図8】この発明の実施の形態2に係るレーザレーダシステムの動作を示すフローチャートである。
【図9】この発明の実施の形態2におけるシャッターの動作を説明する図である。
【図10】この発明の実施の形態2における各レーザ測距装置の視野の重なりを示す図である。
【図11】この発明の実施の形態2におけるシャッターの動作を説明する図である。
【図12】この発明の実施の形態3におけるレーザ測距装置の構成を示す図である。
【図13】この発明の実施の形態4におけるレーザ測距装置の構成を示す図である。
【図14】この発明の実施の形態4におけるシャッターの動作を説明する図である。
【図15】従来のレーザレーダシステムの動作を示す図である。
【発明を実施するための形態】
【0011】
以下、この発明の実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
図1はこの発明の実施の形態1に係るレーザレーダシステムの全体構成を示す図である。
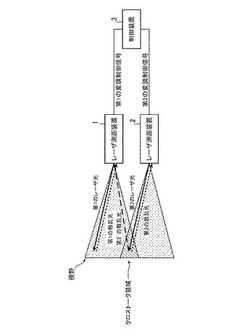
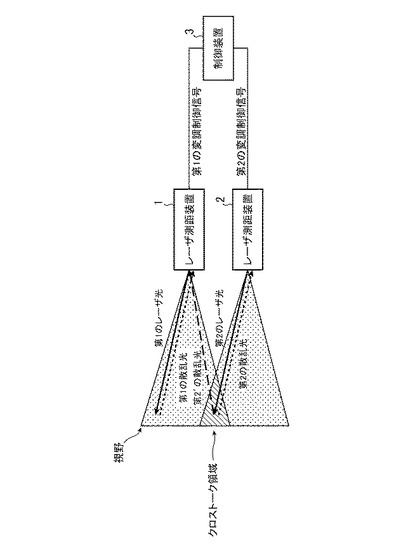
レーザレーダシステムは、図1に示すように、複数台(図1では2台)のレーザ測距装置1,2および制御装置3から構成されている。
【0012】
レーザ測距装置1,2は、制御装置3による制御に従って、レーザ距離測定法を用い、レーザ光の発振時間と反射光の受光時間との差から距離を導出する機能を有するものである。
制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、当該各レーザ光の所定諸言を同期させる機能を有するものである。この制御装置3では、レーザ測距装置1,2ごとに異なるパルス変調タイミングを指定する変調制御信号(第1,2の変調制御信号)を生成する。そして、制御装置3は、生成した各変調制御信号を対応するレーザ測距装置1,2に出力する。
【0013】
なお、図1では、レーザ測距装置1は、自ら照射したレーザ光(第1のレーザ光)に対する対象物からの第1の散乱光を受光している。同様に、レーザ測距装置2は、自ら照射したレーザ光(第2のレーザ光)に対する対象物からの第2の散乱光を受光している。また、レーザ測距装置1には、レーザ測距装置2によりクロストーク領域に照射された第2のレーザ光に対する対象物からの第2’の散乱光も入射されている。なお、クロストーク領域とは、図1に示すように各レーザ測距装置1,2の視野が重なる領域である。
【0014】
次に、レーザ測距装置1の構成について、図2を参照しながら説明する。なお、以下では、レーザ測距装置1の構成について説明するが、その他のレーザ測距装置2についても同様に構成されている。
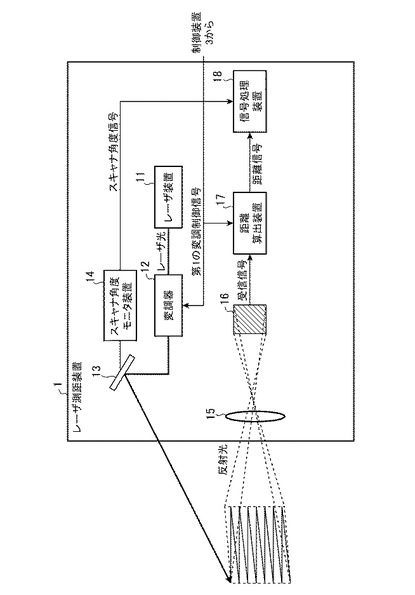
レーザ測距装置1は、図1に示すように、レーザ装置11、変調器12、スキャナ13、スキャナ角度モニタ装置14、受信レンズ15、受光器16、距離算出装置(距離算出手段)17および信号処理装置18から構成されている。
【0015】
なお、レーザ装置11、変調器12およびスキャナ13は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段を構成する。なお実施の形態1では、変調信号として制御装置3からの変調制御信号を用いる。また、受信レンズ15および受光器16は、レーザ光送信手段により走査されたレーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段を構成する。
【0016】
レーザ装置11は、所定のレーザ光を発振する機能を有するものである。
変調器12は、制御装置3からの変調制御信号に従って、レーザ装置11からのレーザ光に強度変調をかけてパルス状とする機能を有するものである。
【0017】
スキャナ13は、所定のスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する機能を有するものである。
スキャナ角度モニタ装置14は、スキャナ13の照射面の角度を読み取る機能を有するものである。そして、スキャナ角度モニタ装置14は、読み取った角度を示すスキャナ角度信号を信号処理装置18に出力する。
【0018】
受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を集光する機能を有するものである。
受光器16は、受信レンズ15により集光された光を受光して電気信号に変換する機能を有するものである。そして、受光器16は、変換した電気信号を受信信号として距離算出装置17に出力する。
【0019】
距離算出装置17は、制御装置3からの変調制御信号と受光器16からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有するものである。そして、距離算出装置17は、算出した距離を示す距離信号を信号処理装置18に出力する。
【0020】
信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する機能を有するものである。
【0021】
次に、上記のように構成されたレーザレーダシステムの動作について、図3を参照しながら説明する。
レーザレーダシステムの動作では、図3に示すように、まず、制御装置3は、レーザ測距装置1,2ごとにパルス変調タイミングを指定する変調制御信号を生成・出力する(ステップST301)。なお、パルス変調タイミングは、レーザ測距装置1,2ごとに異なるように設定する。この制御装置3によるパルス変調タイミングに関しては後述する。
【0022】
次いで、レーザ装置11は所定のレーザ光を発振し、変調器12は、制御装置3からの変調制御信号に基づいて、このレーザ光をパルス状に強度変調する(ステップST302)。
次いで、スキャナ13は、所定のスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する(ステップST303)。なおこの際、スキャナ角度モニタ装置14は、スキャナ13の照射面の角度を読み取り、そのスキャナ角度信号を信号処理装置18に出力している。
【0023】
次いで、受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を受光器16の受光面上へ集光し、受光器16は、この集光された光を受光して電気信号に変換し、受信信号として距離算出装置17に出力する(ステップST304)。
次いで、距離算出装置17は、制御装置3からの変調制御信号と受光器16からの受信信号との時間差に基づいて対象物までの距離を算出し、その距離信号を信号処理装置18に出力する(ステップST305)。
【0024】
次いで、信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する(ステップST306)。
【0025】
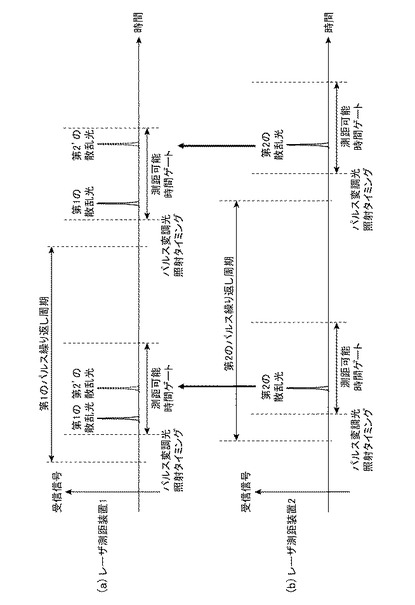
ここで、上記動作を行うレーザレーダシステムにおいて、複数あるレーザ測距装置1,2は、単一の制御装置3によりパルス変調タイミングが制御されている。以下では、この制御装置3によるパルス変調タイミングについて、図4を参照しながら説明する。
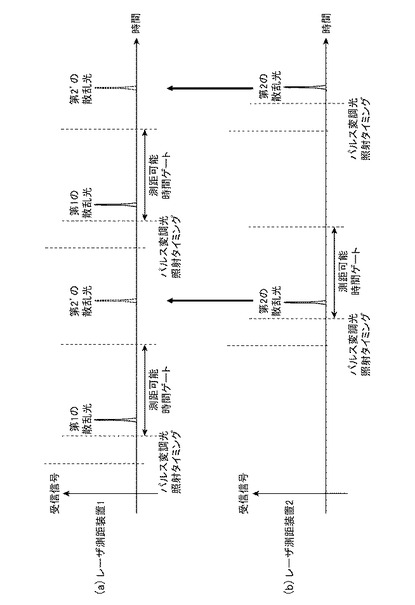
図4では、クロストークが発生する可能性のある2台のレーザ測距装置1,2に対するパルス変調タイミングについて示し、図4(a)はレーザ測距装置1に対するパルス変調タイミングについて、図4(b)はレーザ測距装置2に対するパルス変調タイミングについてそれぞれ示している。
【0026】
クロストークが発生する可能性のある2台のレーザ測距装置1,2では、図4に示すように、交互にパルス変調を行う。なお、上記2台のレーザ測距装置1,2で交互に行うパルス変調の間隔(例えばレーザ測距装置1によるパルス変調光(レーザ光)が照射されるタイミングから、レーザ測距装置2によるパルス変調光(レーザ光)が照射されるタイミングまでの時間)は、図4に示すように、それぞれの距離算出装置17で予め設定されている測距可能時間ゲートの範囲外とする。
【0027】
これにより、例えばレーザ測距装置2からのパルス変調光によりレーザ測距装置1でクロストークが発生したとしても、図4(a)に示すように、当該クロストークによる第2’の散乱光はレーザ測距装置1の距離算出装置17の測距可能時間ゲートの範囲外となる。そのため、距離算出装置17においてクロストークによる誤った距離信号が出力されることはない。
【0028】
なお、距離算出装置17における変調制御信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0029】
また、受光器16は、単素子の受光素子でもよいし、アレイ状の受光素子でもよい。なお、アレイ状の受光素子を用いる場合には、後段に信号加算装置を追加して、各素子からの受信信号を1つの受信信号にまとめるようにする。
【0030】
また、制御装置3で生成・出力する変調制御信号はCW変調でもよい。なお、CW変調の場合には、制御装置3では、パルス変調タイミングを制御するのではなく、変調周波数をレーザ測距装置1,2ごとに変え、当該変調周波数を指定する変調制御信号を出力する。また、距離算出装置17では、制御装置3からの変調制御信号に従って、変調周波数のみを検波することでクロストークによる誤りを回避し、当該変調制御信号と受信信号との位相差に基づいて対象物までの距離を算出する。
このCW変調を用いた場合、変調タイミングを制御する必要がないため、図4に示すような、一方のレーザ測距装置1(2)の距離計測が終わるまで他方のレーザ測距装置2(1)が待機する必要がなくなる。よって、各レーザ測距装置1,2の動作を高速化することができる。
【0031】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0032】
また、制御装置3は、パルス変調タイミングを制御するのではなく、パルス変調の繰り返し周期を制御するようにしてもよい。この場合、制御装置3は、レーザ測距装置1,2ごとにパルス変調の繰り返し周期を変え、当該パルス変調の繰り返し周期を指定する変調制御信号を出力する。また、スキャナ13は、レーザパルス光を2回照射するたびに照射面の角度を変え、2次元走査を行う。また、信号処理装置18は、上記2回照射されたレーザパルス光に基づく距離信号を比較し、異なる場合にはクロストークであるとして無視し、同一である場合には真値であるとしてその距離を抽出する。
【0033】
すなわち、レーザ測距装置1,2ごとにパルス変調の繰り返し周期を変えた場合、図5に示すように、複数回の測距におけるクロストークによる散乱光(第2’の散乱光)の受信タイミングは異なる。そのため、各点における測距を2回ずつ行い、異なる距離信号を出力した場合には、クロストークによる散乱光を検出したとして無視し、同一の距離信号を出力した場合には、真値であるとして信号処理装置18にて距離を抽出する。これにより、クロストークによる誤った距離値が出力されることを防ぐことができる。
また、この手法では、動作開始時に各レーザ測距装置1,2のパルス変調の繰り返し周期を設定するだけでよく、動作中には各レーザ測距装置1,2の同期を取る必要がない。よって、動作開始後に同期用ケーブルを取り外すことで、各レーザ測距装置1,2を可搬にでき、任意の場所に配置することが可能となる。
【0034】
以上のように、この実施の形態1によれば、制御装置3にて、レーザ測距装置1,2ごとに異なるパルス変調タイミングを指定する変調制御信号を生成・出力するように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【0035】
実施の形態2.
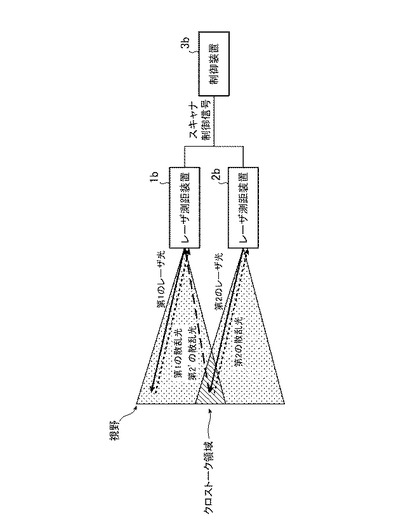
図6はこの発明の実施の形態2に係るレーザレーダシステムの全体構成を示す図である。図6に示す実施の形態2に係るレーザレーダシステムは、図1に示す実施の形態1に係るレーザレーダシステムの複数のレーザ測距装置1,2および制御装置3を複数のレーザ測距装置1b,2bおよび制御装置3bに変更したものである。
【0036】
レーザ測距装置1b,2bは、制御装置3bによる制御に従って、レーザ距離測定法を用い、レーザ光の発振時間と反射光の受光時間との差から距離を導出する機能を有するものである。
制御装置3bは、各レーザ測距装置1b,2bによるレーザ光の重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる機能を有するものである。この制御装置3bでは、各レーザ測距装置1b,2bに同一の照射方向を指定するスキャナ制御信号を生成する。そして、制御装置3bは、生成したスキャナ制御信号を各レーザ測距装置1b,2bに出力する。
【0037】
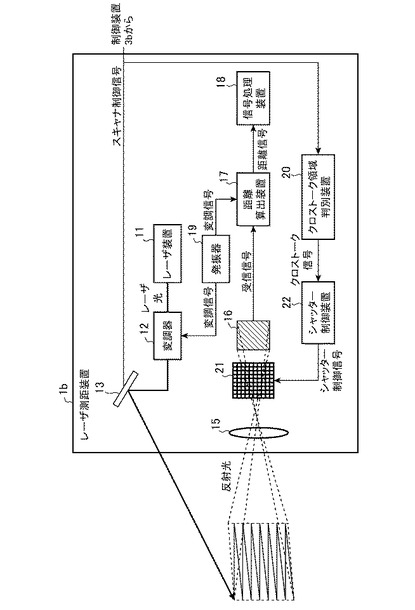
次に、レーザ測距装置1bの構成について、図7を参照しながら説明する。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。この図7に示す実施の形態2におけるレーザ測距装置1bは、図2に示す実施の形態1におけるレーザ測距装置1に、発振器19、クロストーク領域判別装置(クロストーク領域判別手段)20、シャッター21およびシャッター制御装置(シャッター制御手段)22を追加したものである。
【0038】
発振器19は、所定のパルス状の変調信号を発振する機能を有するものである。そして、発振器19は、発振した変調信号を変調器12および距離算出装置17に出力する。
【0039】
クロストーク領域判別装置20は、制御装置3bからのスキャナ制御信号に基づいて他のレーザ測距装置2bによるレーザ光の照射方向を算出し、当該レーザ光の照射方向が、自機1bの予め設定されたクロストーク領域に重なるかを判別する機能を有するものである。そして、クロストーク領域判別装置20は、他のレーザ測距装置2bによるレーザ光の照射方向が自機1bのクロストーク領域に重なると判別した場合には、その旨を示すクロストーク信号をシャッター制御装置22に出力する。
【0040】
シャッター21は、受光器16の前段に2次元的に配列され、シャッター制御装置22からのシャッター制御信号に従って閉じることで、対応する位置に入射した光を遮光する機能を有する複数のシャッター素子を有するものである。
【0041】
シャッター制御装置22は、クロストーク領域判別装置20からのクロストーク信号に従って、シャッター21を制御する機能を有するものである。このシャッター制御装置22は、クロストーク信号が入力された場合には、クロストーク領域からの散乱光が集光(入射)する位置に対応する全てのシャッター素子を閉じるよう指示するシャッター制御信号を生成する。一方、シャッター制御装置22は、クロストーク信号が入力されない場合には、全てのシャッター素子を開くよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22は、生成したシャッター制御信号をシャッター21に出力する。
【0042】
なお、変調器12は、発振器19からの変調信号に従って、レーザ装置11からのレーザ光に強度変調をかけてパルス状とする機能を有する。
また、距離算出装置17は、発振器19からの変調信号と受光器16からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有する。
その他の装置は、図2に示す実施の形態1における各装置と同じ機能を有する。
【0043】
次に、上記のように構成されたレーザレーダシステムの動作について、図8を参照しながら説明する。
レーザレーダシステムの動作では、図8に示すように、まず、制御装置3bは、レーザ測距装置1b,2bによるレーザ光の照射方向を指定するスキャナ制御信号を生成・出力する(ステップST801)。
【0044】
次いで、レーザ装置11は所定のレーザ光を発振し、変調器12は、発振器19からの変調信号に基づいて、このレーザ光をパルス状に強度変調する(ステップST802)。
次いで、スキャナ13は、制御装置3bからのスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する(ステップST803)。
【0045】
次いで、クロストーク領域判別装置20は、制御装置3bからのスキャナ制御信号に基づいて他のレーザ測距装置2b(1b)によるレーザ光の照射方向を算出し、当該レーザ光の照射方向が、自機1b(2b)の予め設定されたクロストーク領域に重なるかを判別する(ステップST804)。
【0046】
このステップST804において、クロストーク領域判別装置20は、他のレーザ測距装置2b(1b)によるレーザ光の照射方向が自機1b(2b)のクロストーク領域に重なると判別した場合には、クロストーク信号をシャッター制御装置22に出力する(ステップST805)。
一方、ステップST804において、クロストーク領域判別装置20は、他のレーザ測距装置2b(1b)によるレーザ光の照射方向が自機1b(2b)のクロストーク領域には重ならないと判別した場合には、シャッター制御装置22へのクロストーク信号の出力を停止する(ステップST806)。
【0047】
次いで、シャッター制御装置22は、クロストーク領域判別装置20からクロストーク信号が入力された場合、クロストーク領域からの散乱光が集光する位置に対応する全てのシャッター素子を閉じるよう指示するシャッター制御信号をシャッター21に出力する(ステップST807)。
一方、シャッター制御装置22は、クロストーク領域判別装置20からのクロストーク信号が入力されない場合、全てのシャッター素子を開くよう指示するシャッター制御信号をシャッター21に出力する(ステップST808)。
次いで、シャッター21は、シャッター制御装置22からのシャッター制御信号に従って、指定された位置のシャッター素子を開閉する(ステップST809)。
【0048】
次いで、受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を受光器16の受光面上へ集光し、受光器16は、この集光された光を受光して電気信号に変換し、受信信号として距離算出装置17に出力する(ステップST810)。
次いで、距離算出装置17は、発振器19からの変調信号と受光器16からの受信信号との時間差に基づいて対象物までの距離を算出し、その距離信号を信号処理装置18に出力する(ステップST811)。
【0049】
次いで、信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する(ステップST812)。
【0050】
ここで、上記動作を行うレーザレーダシステムにおいて、複数あるレーザ測距装置1b,2bは、単一の制御装置3bから出力される同一のスキャナ制御信号を用いてレーザ光を走査している。そのため、図6に示すように、各レーザ測距装置1b,2bの走査方向は同期しており、レーザ光は同じ方向を照射する。
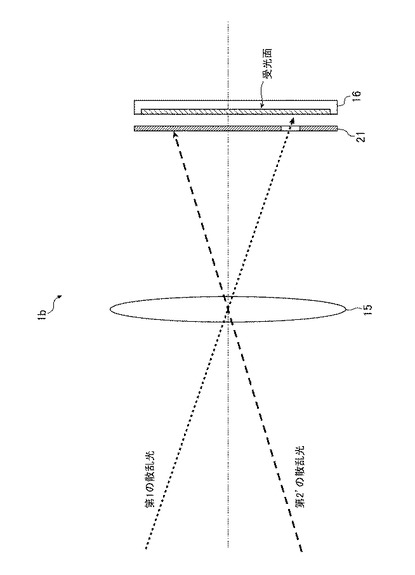
そして、例えばレーザ測距装置2bによるレーザ光の照射方向がレーザ測距装置1bのクロストーク領域に重なる場合、レーザ測距装置2bによるレーザ光に対する第2’の散乱光がレーザ測距装置1bの受信系に入射される。また、レーザ測距装置1b自身によるレーザ光に対する第1の散乱光も同時に入射される。この際、図9に示すように、第1の散乱光と第2’の散乱光は異なる角度からレーザ測距装置1bの受信系に入射し、受信レンズ15により受光器16の受光面上の異なる位置に集光される。
【0051】
そこで、レーザ測距装置2bによるレーザ光の照射方向がレーザ測距装置1bのクロストーク領域に重なる場合、レーザ測距装置1bのクロストーク領域判別装置20にてクロストーク信号を出力し、クロストーク領域内からの散乱光が集光する位置に対応するシャッター素子を閉じる。
これにより、第2’の散乱光を遮光することができ、距離算出装置17においてクロストークによる誤った距離信号が出力されることを防ぐことができる。
【0052】
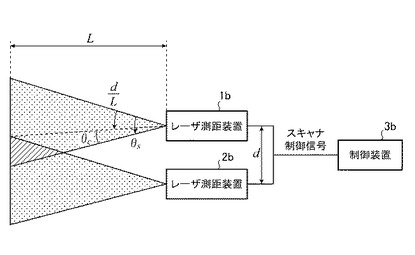
なお、図10に示すように、レーザ測距装置1bにおけるクロストーク領域θcは、例えば各レーザ測距装置1b,2bの視野中心方向が平行に配置されている場合、測距可能距離をL、視野角をθs、レーザ測距装置間距離をdとすると、下式(1)で表される。ただし視野角θsはsinθs=θsとみなせるほど十分に小さいとする。

【0053】
また、図11に示すように、上記クロストーク領域からの散乱光が集光する領域hcは、受信レンズ15の焦点距離をfとすると、下式(2)で表される。
【0054】
なお、シャッター21による散乱光の遮光方法としては、液晶のように透過率を変化させる方法や、デジタルミラーデバイスのように反射角を変化させる方法等、各種方法が適用可能である。
また、シャッター21は、シャッター素子を2次元状に配置したが、1次元状に配置してもよいし、1つのシャッター素子によりクロストーク領域からの散乱光が集光する領域を遮光するようにしてもよい。ここで、シャッター21を1次元状配置、または1つのシャッター素子によりクロストーク領域からの散乱光を遮光する構成とすることで、部品点数を減らすことが可能となり、また、シャッター制御装置22による制御信号の生成量を減少させることが可能となり、動作を高速化することが可能となる。
【0055】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0056】
また、距離算出装置17における変調信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0057】
また、受光器16は、単素子の受光素子でもよいし、アレイ状の受光素子でもよい。なお、アレイ状の受光素子を用いる場合には、後段に信号加算装置を追加して、各素子からの受信信号を1つの受信信号にまとめるようにする。
【0058】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0059】
以上のように、この実施の形態2によれば、制御装置3bにて、各レーザ測距装置1b,2bに同一の照射方向を指定するスキャナ制御信号を生成し、各レーザ測距装置1b,2bは、スキャナ制御信号に基づき、自機1b(2b)と他のレーザ測距装置2b(1b)によるレーザ光の照射方向が重なる場合には、当該照射方向が重なる領域からの散乱光が集光する位置に対応するシャッター素子を閉じるように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【0060】
実施の形態3.
図12はこの発明の実施の形態3におけるレーザ測距装置1bの構成を示す図である。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。
図12に示す実施の形態3におけるレーザ測距装置1bは、図7に示す実施の形態2に係るレーザ測距装置1bの受光器16、シャッター21およびシャッター制御装置22をそれぞれアレイ状受光器23、信号シャッター24およびシャッター制御装置(シャッター制御手段)22bに変更し、信号加算装置25を追加したものである。
【0061】
アレイ状受光器23は、アレイ状に配置され、受信レンズ15により集光され対応する位置に入射した光を受光し、電気信号に変換する機能を有する複数の受光素子を有するものである。そして、アレイ状受光器23の各受光素子は、変換した電気信号を受信信号として距離算出装置17側に出力する。
【0062】
信号シャッター24は、アレイ状受光器23の後段に配置され、シャッター制御装置22bからのシャッター制御信号に従って、指定された受信信号をカットする機能を有するものである。
【0063】
シャッター制御装置22bは、クロストーク領域判別装置20からのクロストーク信号に従って、信号シャッター24を制御する機能を有するものである。このシャッター制御装置22bは、クロストーク信号が入力された場合には、クロストーク領域からの散乱光が集光する位置に対応する受光素子からの受信信号をカットするよう指示するシャッター制御信号を生成する。一方、シャッター制御装置22bは、クロストーク信号が入力されない場合には、全ての受光素子からの受信信号をカットせず、そのまま出力するよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22bは、生成したシャッター制御信号を信号シャッター24に出力する。
【0064】
信号加算装置25は、信号シャッター24を通過した各受信信号を加算する機能を有するものである。そして、信号加算装置25は、加算結果を受信信号として距離算出装置17に出力する。
なお、距離算出装置17は、発振器19からの変調信号と信号加算装置25からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有する。
その他の装置は、図7に示す実施の形態2における各装置と同じ機能を有する。
【0065】
ここで、実施の形態3に係るレーザレーダシステムでは、実施の形態2に係るレーザレーダシステムと比較して、物理的なシャッター21では遮光しきれない背景光による影響を回避することができるという効果を有している。
【0066】
すなわち、実施の形態2では、受光器16の前段にシャッター21を配置し、シャッター素子を閉じることで遮光を行っていた。しかし、例えばシャッター21として液晶のような透過率を低下させるものを用いた場合、透過率は0%にはならないため、背景光を完全には遮光できない可能性がある。また、デジタルミラーデバイスのように反射角を変化させるものを用いた場合でも、反射面において散乱光が発生し、当該散乱光が背景光となって受光面に入射してしまうため、背景光を完全には遮光できない可能性がある。
そこで、シャッター21により遮光を行うのではなく、信号シャッター24を用いて受光素子により変換された電気信号をカットする。これにより、シャッター21では遮光しきれない背景光による影響を回避することが可能となる。
また、信号シャッター24では物理的な動作を伴わないことから、光を遮光するシャッター21と比較して、シャッター動作を高速化することが可能であり、また、小型化することが可能となる。
【0067】
なお、信号シャッター24による受信信号のカット方法としては、スイッチのように電気的接続のON/OFFにより受光素子からの受信信号をカットする方法や、バイアス印加電圧をカットすることで対応する受光素子を不動作にして受信信号を出力させない方法等、各種方法が適用可能である。
【0068】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0069】
また、距離算出装置17における変調信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0070】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0071】
以上のように、この実施の形態3によれば、シャッター21に代えて、アレイ状受光器23の各受光素子からの受信信号のうち、指定された信号をカットする信号シャッター24を用いるように構成したので、実施の形態2と比較して、シャッター21では遮光しきれない背景光による影響を回避することが可能となる。
【0072】
実施の形態4.
図13はこの発明の実施の形態4におけるレーザ測距装置1bの構成を示す図である。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。
図13に示す実施の形態4におけるレーザ測距装置1bは、図7に示す実施の形態2に係るレーザ測距装置1bのクロストーク領域判別装置20およびシャッター制御装置22を集光位置算出装置(入射位置算出手段)26およびシャッター制御装置(シャッター制御手段)22cに変更したものである。
【0073】
集光位置算出装置26は、制御装置3bからのスキャナ制御信号に基づいて自機1bによるレーザ光の照射方向を算出し、当該レーザ光に対する散乱光が集光(入射)する受光器16の受光面上の位置を算出する機能を有するものである。そして、集光位置算出装置26は、算出した集光(入射)位置を示す集光位置信号をシャッター制御装置22cに出力する。
【0074】
シャッター制御装置22cは、集光位置算出装置26からの集光位置信号に従って、シャッター21を制御する機能を有するものである。このシャッター制御装置22cは、集光位置信号により指定された位置に対応する全てのシャッター素子を開き、その他の全てのシャッター素子を閉じるよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22cは、生成したシャッター制御信号をシャッター21に出力する。
その他の装置は、図7に示す実施の形態2における各装置と同じ機能を有する。
【0075】
ここで、実施の形態4に係るレーザレーダシステムでは、実施の形態2に係るレーザレーダシステムと比較して、受光器16の受光面に集光しないクロストークによる散乱光を減衰させることができ、クロストークによる誤りを回避することができるという効果を有している。
【0076】
例えばクロストークによる散乱光が受信視野外から入射した場合、当該散乱光は受光面には集光されず、受信レンズ15を支持するレンズ鏡筒や、レーザ測距装置筐体の壁面に当たり、その位置から再び散乱光が生成される。また、受信レンズ15表面においても、再び散乱光が生成される可能性がある。そして、当該散乱光が受光面に照射された場合、自機1bでクロストークとして誤った距離信号を出力してしまう。
また、上記散乱光は、受光面において集光しないため、実施の形態2,3に係るレーザレーダシステムのように、シャッター21や信号シャッター24により受光面上の一部の領域での遮光や信号をカットすることではクロストークを回避できない。
【0077】
そこで、クロストークによる散乱光を減衰させるため、図14に示すように、自機1bによるレーザ光の照射方向から伝搬する散乱光のみを通過させるようにシャッター素子を開き、その他のシャッター素子を全て閉じておく。これにより、クロストークによる散乱光の受光量を大幅に減衰させることができる。
例えば、クロストークによる散乱光が受光面全体に照射されるとし、シャッター素子が100×100素子の2次元配列で構成されているとし、レーザ光の照射方向から伝搬する散乱光の集光スポットサイズがシャッター素子以下とすると、上記動作によりクロストークによる散乱光の受光量を1/10000に減衰させることができる。
そして、クロストークによる散乱光による受光量を減衰させた結果、クロストークによる受信信号も減衰する。そのため、受信信号が距離算出装置17の検出限界を下回る場合には、誤った距離信号を出力することはなく、クロストークによる誤りを回避することが可能となる。
【0078】
なお、集光位置算出装置26において算出される、レーザ光の照射方向から伝搬する散乱光の受光面上の集光位置hLは、レーザ照射方向をθL、受信レンズ15の焦点距離をfとすると、下式(3)で表される。
hL=f×θL (3)
【0079】
なお、シャッター21は、シャッター素子を2次元状に配置したが、1次元状に配置してもよい。ここで、シャッター21を1次元状配置とすることで、部品点数を減らすことが可能となり、また、シャッター制御装置22cにおける制御信号の生成量を減少させることが可能となり、動作を高速化することが可能となる
【0080】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0081】
また、距離算出装置17における変調制御信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0082】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0083】
以上のように、この実施の形態4によれば、集光位置算出装置26にて、自機によるレーザ光に対する散乱光が集光する位置を算出し、当該集光位置に該当する全てのシャッター素子を開き、その他の全てのシャッター素子を閉じるように構成したので、実施の形態2と比較して、受光器16の受光面に集光しないクロストークによる散乱光を減衰させることができ、クロストークによる誤りを回避することができる。
【0084】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0085】
1,1b,2,2b レーザ測距装置、3,3b 制御装置、11 レーザ装置、12 変調器、13 スキャナ、14 スキャナ角度モニタ装置、15 受信レンズ、16 受光器、17 距離算出装置、18 信号処理装置、19 発振器、20 クロストーク領域判別装置、21 シャッター、22,22b,22c シャッター制御装置、23 アレイ状受光器、24 信号シャッター、25 信号加算装置、26 集光位置算出装置。
【技術分野】
【0001】
この発明は、レーザ光の発振時間と反射光の受光時間との差から距離を導出するレーザ距離測定法を用いたレーザレーダシステム、レーザ測距装置および制御装置に関するものである。
【背景技術】
【0002】
従来技術のレーザ測距装置では、レーザ光を走査して照射し、レーザ走査範囲における対象物の多点からの散乱光を単素子の受光器により受信し、レーザ光の照射から受信までの時間を計測することで、対象物までの測距を行っている。さらに、レーザ走査角度および測距結果から3次元画像を取得している(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−271275号公報
【非特許文献】
【0004】
【非特許文献1】平井他、「パルス方式3D Imaging LADARの開発」、第27回レーザセンシングシンポジウム予稿集、pp.90−91,2009
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に開示された従来技術において、図15に示すように、上記レーザ測距装置101,102を複数台配置して隙間なく広範囲な空間の3次元画像を取得する場合、各レーザ測距装置101,102の視野(レーザ光の照射方向)が重なる場合がある。
【0006】
この場合、例えば、レーザ測距装置102によるレーザ光(第2のレーザ光)に対する第2’の散乱光が、レーザ測距装置101により受信されてしまうというクロストークと呼ばれる現象が発生する。これにより、レーザ測距装置101では誤った測距結果を出力してしまうという課題があった。
【0007】
この発明は、上記のような課題を解決するためになされたもので、広視野な受信系においてクロストークによる誤りを回避することができるレーザレーダシステム、レーザ測距装置および制御装置を提供することを目的としている。
【課題を解決するための手段】
【0008】
この発明に係るレーザレーダシステムは、対象物の測距を行う複数のレーザ測距装置と、各レーザ測距装置を制御する制御装置とを備え、レーザ測距装置は、制御装置による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段と、レーザ光送信手段により走査されたレーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、散乱光受信手段により変換された電気信号と変調信号との時間差または位相差に基づいて対象物までの距離を算出する距離算出手段とを備え、制御装置は、各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させるものである。
【発明の効果】
【0009】
この発明によれば、上記のように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【図面の簡単な説明】
【0010】
【図1】この発明の実施の形態1に係るレーザレーダシステムの全体構成を示す図である。
【図2】この発明の実施の形態1におけるレーザ測距装置の構成を示す図である。
【図3】この発明の実施の形態1に係るレーザレーダシステムの動作を示すフローチャートである。
【図4】この発明の実施の形態1に係るレーザレーダシステムによるパルス変調タイミングを示す図である。
【図5】この発明の実施の形態1に係るレーザレーダシステムによるパルス変調の繰り返し周期を示す図である。
【図6】この発明の実施の形態2に係るレーザレーダシステムの全体構成を示す図である。
【図7】この発明の実施の形態2におけるレーザ測距装置の構成を示す図である。
【図8】この発明の実施の形態2に係るレーザレーダシステムの動作を示すフローチャートである。
【図9】この発明の実施の形態2におけるシャッターの動作を説明する図である。
【図10】この発明の実施の形態2における各レーザ測距装置の視野の重なりを示す図である。
【図11】この発明の実施の形態2におけるシャッターの動作を説明する図である。
【図12】この発明の実施の形態3におけるレーザ測距装置の構成を示す図である。
【図13】この発明の実施の形態4におけるレーザ測距装置の構成を示す図である。
【図14】この発明の実施の形態4におけるシャッターの動作を説明する図である。
【図15】従来のレーザレーダシステムの動作を示す図である。
【発明を実施するための形態】
【0011】
以下、この発明の実施の形態について図面を参照しながら詳細に説明する。
実施の形態1.
図1はこの発明の実施の形態1に係るレーザレーダシステムの全体構成を示す図である。
レーザレーダシステムは、図1に示すように、複数台(図1では2台)のレーザ測距装置1,2および制御装置3から構成されている。
【0012】
レーザ測距装置1,2は、制御装置3による制御に従って、レーザ距離測定法を用い、レーザ光の発振時間と反射光の受光時間との差から距離を導出する機能を有するものである。
制御装置3は、各レーザ測距装置1,2によるレーザ光の重なりを回避するように、当該各レーザ光の所定諸言を同期させる機能を有するものである。この制御装置3では、レーザ測距装置1,2ごとに異なるパルス変調タイミングを指定する変調制御信号(第1,2の変調制御信号)を生成する。そして、制御装置3は、生成した各変調制御信号を対応するレーザ測距装置1,2に出力する。
【0013】
なお、図1では、レーザ測距装置1は、自ら照射したレーザ光(第1のレーザ光)に対する対象物からの第1の散乱光を受光している。同様に、レーザ測距装置2は、自ら照射したレーザ光(第2のレーザ光)に対する対象物からの第2の散乱光を受光している。また、レーザ測距装置1には、レーザ測距装置2によりクロストーク領域に照射された第2のレーザ光に対する対象物からの第2’の散乱光も入射されている。なお、クロストーク領域とは、図1に示すように各レーザ測距装置1,2の視野が重なる領域である。
【0014】
次に、レーザ測距装置1の構成について、図2を参照しながら説明する。なお、以下では、レーザ測距装置1の構成について説明するが、その他のレーザ測距装置2についても同様に構成されている。
レーザ測距装置1は、図1に示すように、レーザ装置11、変調器12、スキャナ13、スキャナ角度モニタ装置14、受信レンズ15、受光器16、距離算出装置(距離算出手段)17および信号処理装置18から構成されている。
【0015】
なお、レーザ装置11、変調器12およびスキャナ13は、制御装置3による制御に従って、所定の変調信号でレーザ光を変調し、対象物に向けて走査するレーザ光送信手段を構成する。なお実施の形態1では、変調信号として制御装置3からの変調制御信号を用いる。また、受信レンズ15および受光器16は、レーザ光送信手段により走査されたレーザ光に対する対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段を構成する。
【0016】
レーザ装置11は、所定のレーザ光を発振する機能を有するものである。
変調器12は、制御装置3からの変調制御信号に従って、レーザ装置11からのレーザ光に強度変調をかけてパルス状とする機能を有するものである。
【0017】
スキャナ13は、所定のスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する機能を有するものである。
スキャナ角度モニタ装置14は、スキャナ13の照射面の角度を読み取る機能を有するものである。そして、スキャナ角度モニタ装置14は、読み取った角度を示すスキャナ角度信号を信号処理装置18に出力する。
【0018】
受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を集光する機能を有するものである。
受光器16は、受信レンズ15により集光された光を受光して電気信号に変換する機能を有するものである。そして、受光器16は、変換した電気信号を受信信号として距離算出装置17に出力する。
【0019】
距離算出装置17は、制御装置3からの変調制御信号と受光器16からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有するものである。そして、距離算出装置17は、算出した距離を示す距離信号を信号処理装置18に出力する。
【0020】
信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する機能を有するものである。
【0021】
次に、上記のように構成されたレーザレーダシステムの動作について、図3を参照しながら説明する。
レーザレーダシステムの動作では、図3に示すように、まず、制御装置3は、レーザ測距装置1,2ごとにパルス変調タイミングを指定する変調制御信号を生成・出力する(ステップST301)。なお、パルス変調タイミングは、レーザ測距装置1,2ごとに異なるように設定する。この制御装置3によるパルス変調タイミングに関しては後述する。
【0022】
次いで、レーザ装置11は所定のレーザ光を発振し、変調器12は、制御装置3からの変調制御信号に基づいて、このレーザ光をパルス状に強度変調する(ステップST302)。
次いで、スキャナ13は、所定のスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する(ステップST303)。なおこの際、スキャナ角度モニタ装置14は、スキャナ13の照射面の角度を読み取り、そのスキャナ角度信号を信号処理装置18に出力している。
【0023】
次いで、受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を受光器16の受光面上へ集光し、受光器16は、この集光された光を受光して電気信号に変換し、受信信号として距離算出装置17に出力する(ステップST304)。
次いで、距離算出装置17は、制御装置3からの変調制御信号と受光器16からの受信信号との時間差に基づいて対象物までの距離を算出し、その距離信号を信号処理装置18に出力する(ステップST305)。
【0024】
次いで、信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する(ステップST306)。
【0025】
ここで、上記動作を行うレーザレーダシステムにおいて、複数あるレーザ測距装置1,2は、単一の制御装置3によりパルス変調タイミングが制御されている。以下では、この制御装置3によるパルス変調タイミングについて、図4を参照しながら説明する。
図4では、クロストークが発生する可能性のある2台のレーザ測距装置1,2に対するパルス変調タイミングについて示し、図4(a)はレーザ測距装置1に対するパルス変調タイミングについて、図4(b)はレーザ測距装置2に対するパルス変調タイミングについてそれぞれ示している。
【0026】
クロストークが発生する可能性のある2台のレーザ測距装置1,2では、図4に示すように、交互にパルス変調を行う。なお、上記2台のレーザ測距装置1,2で交互に行うパルス変調の間隔(例えばレーザ測距装置1によるパルス変調光(レーザ光)が照射されるタイミングから、レーザ測距装置2によるパルス変調光(レーザ光)が照射されるタイミングまでの時間)は、図4に示すように、それぞれの距離算出装置17で予め設定されている測距可能時間ゲートの範囲外とする。
【0027】
これにより、例えばレーザ測距装置2からのパルス変調光によりレーザ測距装置1でクロストークが発生したとしても、図4(a)に示すように、当該クロストークによる第2’の散乱光はレーザ測距装置1の距離算出装置17の測距可能時間ゲートの範囲外となる。そのため、距離算出装置17においてクロストークによる誤った距離信号が出力されることはない。
【0028】
なお、距離算出装置17における変調制御信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0029】
また、受光器16は、単素子の受光素子でもよいし、アレイ状の受光素子でもよい。なお、アレイ状の受光素子を用いる場合には、後段に信号加算装置を追加して、各素子からの受信信号を1つの受信信号にまとめるようにする。
【0030】
また、制御装置3で生成・出力する変調制御信号はCW変調でもよい。なお、CW変調の場合には、制御装置3では、パルス変調タイミングを制御するのではなく、変調周波数をレーザ測距装置1,2ごとに変え、当該変調周波数を指定する変調制御信号を出力する。また、距離算出装置17では、制御装置3からの変調制御信号に従って、変調周波数のみを検波することでクロストークによる誤りを回避し、当該変調制御信号と受信信号との位相差に基づいて対象物までの距離を算出する。
このCW変調を用いた場合、変調タイミングを制御する必要がないため、図4に示すような、一方のレーザ測距装置1(2)の距離計測が終わるまで他方のレーザ測距装置2(1)が待機する必要がなくなる。よって、各レーザ測距装置1,2の動作を高速化することができる。
【0031】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0032】
また、制御装置3は、パルス変調タイミングを制御するのではなく、パルス変調の繰り返し周期を制御するようにしてもよい。この場合、制御装置3は、レーザ測距装置1,2ごとにパルス変調の繰り返し周期を変え、当該パルス変調の繰り返し周期を指定する変調制御信号を出力する。また、スキャナ13は、レーザパルス光を2回照射するたびに照射面の角度を変え、2次元走査を行う。また、信号処理装置18は、上記2回照射されたレーザパルス光に基づく距離信号を比較し、異なる場合にはクロストークであるとして無視し、同一である場合には真値であるとしてその距離を抽出する。
【0033】
すなわち、レーザ測距装置1,2ごとにパルス変調の繰り返し周期を変えた場合、図5に示すように、複数回の測距におけるクロストークによる散乱光(第2’の散乱光)の受信タイミングは異なる。そのため、各点における測距を2回ずつ行い、異なる距離信号を出力した場合には、クロストークによる散乱光を検出したとして無視し、同一の距離信号を出力した場合には、真値であるとして信号処理装置18にて距離を抽出する。これにより、クロストークによる誤った距離値が出力されることを防ぐことができる。
また、この手法では、動作開始時に各レーザ測距装置1,2のパルス変調の繰り返し周期を設定するだけでよく、動作中には各レーザ測距装置1,2の同期を取る必要がない。よって、動作開始後に同期用ケーブルを取り外すことで、各レーザ測距装置1,2を可搬にでき、任意の場所に配置することが可能となる。
【0034】
以上のように、この実施の形態1によれば、制御装置3にて、レーザ測距装置1,2ごとに異なるパルス変調タイミングを指定する変調制御信号を生成・出力するように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【0035】
実施の形態2.
図6はこの発明の実施の形態2に係るレーザレーダシステムの全体構成を示す図である。図6に示す実施の形態2に係るレーザレーダシステムは、図1に示す実施の形態1に係るレーザレーダシステムの複数のレーザ測距装置1,2および制御装置3を複数のレーザ測距装置1b,2bおよび制御装置3bに変更したものである。
【0036】
レーザ測距装置1b,2bは、制御装置3bによる制御に従って、レーザ距離測定法を用い、レーザ光の発振時間と反射光の受光時間との差から距離を導出する機能を有するものである。
制御装置3bは、各レーザ測距装置1b,2bによるレーザ光の重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる機能を有するものである。この制御装置3bでは、各レーザ測距装置1b,2bに同一の照射方向を指定するスキャナ制御信号を生成する。そして、制御装置3bは、生成したスキャナ制御信号を各レーザ測距装置1b,2bに出力する。
【0037】
次に、レーザ測距装置1bの構成について、図7を参照しながら説明する。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。この図7に示す実施の形態2におけるレーザ測距装置1bは、図2に示す実施の形態1におけるレーザ測距装置1に、発振器19、クロストーク領域判別装置(クロストーク領域判別手段)20、シャッター21およびシャッター制御装置(シャッター制御手段)22を追加したものである。
【0038】
発振器19は、所定のパルス状の変調信号を発振する機能を有するものである。そして、発振器19は、発振した変調信号を変調器12および距離算出装置17に出力する。
【0039】
クロストーク領域判別装置20は、制御装置3bからのスキャナ制御信号に基づいて他のレーザ測距装置2bによるレーザ光の照射方向を算出し、当該レーザ光の照射方向が、自機1bの予め設定されたクロストーク領域に重なるかを判別する機能を有するものである。そして、クロストーク領域判別装置20は、他のレーザ測距装置2bによるレーザ光の照射方向が自機1bのクロストーク領域に重なると判別した場合には、その旨を示すクロストーク信号をシャッター制御装置22に出力する。
【0040】
シャッター21は、受光器16の前段に2次元的に配列され、シャッター制御装置22からのシャッター制御信号に従って閉じることで、対応する位置に入射した光を遮光する機能を有する複数のシャッター素子を有するものである。
【0041】
シャッター制御装置22は、クロストーク領域判別装置20からのクロストーク信号に従って、シャッター21を制御する機能を有するものである。このシャッター制御装置22は、クロストーク信号が入力された場合には、クロストーク領域からの散乱光が集光(入射)する位置に対応する全てのシャッター素子を閉じるよう指示するシャッター制御信号を生成する。一方、シャッター制御装置22は、クロストーク信号が入力されない場合には、全てのシャッター素子を開くよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22は、生成したシャッター制御信号をシャッター21に出力する。
【0042】
なお、変調器12は、発振器19からの変調信号に従って、レーザ装置11からのレーザ光に強度変調をかけてパルス状とする機能を有する。
また、距離算出装置17は、発振器19からの変調信号と受光器16からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有する。
その他の装置は、図2に示す実施の形態1における各装置と同じ機能を有する。
【0043】
次に、上記のように構成されたレーザレーダシステムの動作について、図8を参照しながら説明する。
レーザレーダシステムの動作では、図8に示すように、まず、制御装置3bは、レーザ測距装置1b,2bによるレーザ光の照射方向を指定するスキャナ制御信号を生成・出力する(ステップST801)。
【0044】
次いで、レーザ装置11は所定のレーザ光を発振し、変調器12は、発振器19からの変調信号に基づいて、このレーザ光をパルス状に強度変調する(ステップST802)。
次いで、スキャナ13は、制御装置3bからのスキャナ制御信号に従って、変調器12により変調されたレーザ光を、受信レンズ15が当該レーザ光の反射光を受光可能な角度範囲である受信視野内において、2次元走査する(ステップST803)。
【0045】
次いで、クロストーク領域判別装置20は、制御装置3bからのスキャナ制御信号に基づいて他のレーザ測距装置2b(1b)によるレーザ光の照射方向を算出し、当該レーザ光の照射方向が、自機1b(2b)の予め設定されたクロストーク領域に重なるかを判別する(ステップST804)。
【0046】
このステップST804において、クロストーク領域判別装置20は、他のレーザ測距装置2b(1b)によるレーザ光の照射方向が自機1b(2b)のクロストーク領域に重なると判別した場合には、クロストーク信号をシャッター制御装置22に出力する(ステップST805)。
一方、ステップST804において、クロストーク領域判別装置20は、他のレーザ測距装置2b(1b)によるレーザ光の照射方向が自機1b(2b)のクロストーク領域には重ならないと判別した場合には、シャッター制御装置22へのクロストーク信号の出力を停止する(ステップST806)。
【0047】
次いで、シャッター制御装置22は、クロストーク領域判別装置20からクロストーク信号が入力された場合、クロストーク領域からの散乱光が集光する位置に対応する全てのシャッター素子を閉じるよう指示するシャッター制御信号をシャッター21に出力する(ステップST807)。
一方、シャッター制御装置22は、クロストーク領域判別装置20からのクロストーク信号が入力されない場合、全てのシャッター素子を開くよう指示するシャッター制御信号をシャッター21に出力する(ステップST808)。
次いで、シャッター21は、シャッター制御装置22からのシャッター制御信号に従って、指定された位置のシャッター素子を開閉する(ステップST809)。
【0048】
次いで、受信レンズ15は、受信視野中心に対して同軸方向に伝搬する対象物からの散乱光を受光器16の受光面上へ集光し、受光器16は、この集光された光を受光して電気信号に変換し、受信信号として距離算出装置17に出力する(ステップST810)。
次いで、距離算出装置17は、発振器19からの変調信号と受光器16からの受信信号との時間差に基づいて対象物までの距離を算出し、その距離信号を信号処理装置18に出力する(ステップST811)。
【0049】
次いで、信号処理装置18は、スキャナ角度モニタ装置14からのスキャナ角度信号に基づいてレーザ光の照射方向を算出し、距離算出装置17からの距離信号から距離を抽出し、各レーザ光の照射方向に対する距離をプロットすることで3次元画像を生成する(ステップST812)。
【0050】
ここで、上記動作を行うレーザレーダシステムにおいて、複数あるレーザ測距装置1b,2bは、単一の制御装置3bから出力される同一のスキャナ制御信号を用いてレーザ光を走査している。そのため、図6に示すように、各レーザ測距装置1b,2bの走査方向は同期しており、レーザ光は同じ方向を照射する。
そして、例えばレーザ測距装置2bによるレーザ光の照射方向がレーザ測距装置1bのクロストーク領域に重なる場合、レーザ測距装置2bによるレーザ光に対する第2’の散乱光がレーザ測距装置1bの受信系に入射される。また、レーザ測距装置1b自身によるレーザ光に対する第1の散乱光も同時に入射される。この際、図9に示すように、第1の散乱光と第2’の散乱光は異なる角度からレーザ測距装置1bの受信系に入射し、受信レンズ15により受光器16の受光面上の異なる位置に集光される。
【0051】
そこで、レーザ測距装置2bによるレーザ光の照射方向がレーザ測距装置1bのクロストーク領域に重なる場合、レーザ測距装置1bのクロストーク領域判別装置20にてクロストーク信号を出力し、クロストーク領域内からの散乱光が集光する位置に対応するシャッター素子を閉じる。
これにより、第2’の散乱光を遮光することができ、距離算出装置17においてクロストークによる誤った距離信号が出力されることを防ぐことができる。
【0052】
なお、図10に示すように、レーザ測距装置1bにおけるクロストーク領域θcは、例えば各レーザ測距装置1b,2bの視野中心方向が平行に配置されている場合、測距可能距離をL、視野角をθs、レーザ測距装置間距離をdとすると、下式(1)で表される。ただし視野角θsはsinθs=θsとみなせるほど十分に小さいとする。
【0053】
また、図11に示すように、上記クロストーク領域からの散乱光が集光する領域hcは、受信レンズ15の焦点距離をfとすると、下式(2)で表される。
【0054】
なお、シャッター21による散乱光の遮光方法としては、液晶のように透過率を変化させる方法や、デジタルミラーデバイスのように反射角を変化させる方法等、各種方法が適用可能である。
また、シャッター21は、シャッター素子を2次元状に配置したが、1次元状に配置してもよいし、1つのシャッター素子によりクロストーク領域からの散乱光が集光する領域を遮光するようにしてもよい。ここで、シャッター21を1次元状配置、または1つのシャッター素子によりクロストーク領域からの散乱光を遮光する構成とすることで、部品点数を減らすことが可能となり、また、シャッター制御装置22による制御信号の生成量を減少させることが可能となり、動作を高速化することが可能となる。
【0055】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0056】
また、距離算出装置17における変調信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0057】
また、受光器16は、単素子の受光素子でもよいし、アレイ状の受光素子でもよい。なお、アレイ状の受光素子を用いる場合には、後段に信号加算装置を追加して、各素子からの受信信号を1つの受信信号にまとめるようにする。
【0058】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0059】
以上のように、この実施の形態2によれば、制御装置3bにて、各レーザ測距装置1b,2bに同一の照射方向を指定するスキャナ制御信号を生成し、各レーザ測距装置1b,2bは、スキャナ制御信号に基づき、自機1b(2b)と他のレーザ測距装置2b(1b)によるレーザ光の照射方向が重なる場合には、当該照射方向が重なる領域からの散乱光が集光する位置に対応するシャッター素子を閉じるように構成したので、広視野な受信系においてクロストークによる誤りを回避することができる。
【0060】
実施の形態3.
図12はこの発明の実施の形態3におけるレーザ測距装置1bの構成を示す図である。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。
図12に示す実施の形態3におけるレーザ測距装置1bは、図7に示す実施の形態2に係るレーザ測距装置1bの受光器16、シャッター21およびシャッター制御装置22をそれぞれアレイ状受光器23、信号シャッター24およびシャッター制御装置(シャッター制御手段)22bに変更し、信号加算装置25を追加したものである。
【0061】
アレイ状受光器23は、アレイ状に配置され、受信レンズ15により集光され対応する位置に入射した光を受光し、電気信号に変換する機能を有する複数の受光素子を有するものである。そして、アレイ状受光器23の各受光素子は、変換した電気信号を受信信号として距離算出装置17側に出力する。
【0062】
信号シャッター24は、アレイ状受光器23の後段に配置され、シャッター制御装置22bからのシャッター制御信号に従って、指定された受信信号をカットする機能を有するものである。
【0063】
シャッター制御装置22bは、クロストーク領域判別装置20からのクロストーク信号に従って、信号シャッター24を制御する機能を有するものである。このシャッター制御装置22bは、クロストーク信号が入力された場合には、クロストーク領域からの散乱光が集光する位置に対応する受光素子からの受信信号をカットするよう指示するシャッター制御信号を生成する。一方、シャッター制御装置22bは、クロストーク信号が入力されない場合には、全ての受光素子からの受信信号をカットせず、そのまま出力するよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22bは、生成したシャッター制御信号を信号シャッター24に出力する。
【0064】
信号加算装置25は、信号シャッター24を通過した各受信信号を加算する機能を有するものである。そして、信号加算装置25は、加算結果を受信信号として距離算出装置17に出力する。
なお、距離算出装置17は、発振器19からの変調信号と信号加算装置25からの受信信号との時間差に基づいて、レーザ光の伝搬時間を算出することで対象物までの距離を算出する機能を有する。
その他の装置は、図7に示す実施の形態2における各装置と同じ機能を有する。
【0065】
ここで、実施の形態3に係るレーザレーダシステムでは、実施の形態2に係るレーザレーダシステムと比較して、物理的なシャッター21では遮光しきれない背景光による影響を回避することができるという効果を有している。
【0066】
すなわち、実施の形態2では、受光器16の前段にシャッター21を配置し、シャッター素子を閉じることで遮光を行っていた。しかし、例えばシャッター21として液晶のような透過率を低下させるものを用いた場合、透過率は0%にはならないため、背景光を完全には遮光できない可能性がある。また、デジタルミラーデバイスのように反射角を変化させるものを用いた場合でも、反射面において散乱光が発生し、当該散乱光が背景光となって受光面に入射してしまうため、背景光を完全には遮光できない可能性がある。
そこで、シャッター21により遮光を行うのではなく、信号シャッター24を用いて受光素子により変換された電気信号をカットする。これにより、シャッター21では遮光しきれない背景光による影響を回避することが可能となる。
また、信号シャッター24では物理的な動作を伴わないことから、光を遮光するシャッター21と比較して、シャッター動作を高速化することが可能であり、また、小型化することが可能となる。
【0067】
なお、信号シャッター24による受信信号のカット方法としては、スイッチのように電気的接続のON/OFFにより受光素子からの受信信号をカットする方法や、バイアス印加電圧をカットすることで対応する受光素子を不動作にして受信信号を出力させない方法等、各種方法が適用可能である。
【0068】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0069】
また、距離算出装置17における変調信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0070】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0071】
以上のように、この実施の形態3によれば、シャッター21に代えて、アレイ状受光器23の各受光素子からの受信信号のうち、指定された信号をカットする信号シャッター24を用いるように構成したので、実施の形態2と比較して、シャッター21では遮光しきれない背景光による影響を回避することが可能となる。
【0072】
実施の形態4.
図13はこの発明の実施の形態4におけるレーザ測距装置1bの構成を示す図である。なお、以下では、レーザ測距装置1bの構成について説明するが、その他のレーザ測距装置2bについても同様に構成されている。
図13に示す実施の形態4におけるレーザ測距装置1bは、図7に示す実施の形態2に係るレーザ測距装置1bのクロストーク領域判別装置20およびシャッター制御装置22を集光位置算出装置(入射位置算出手段)26およびシャッター制御装置(シャッター制御手段)22cに変更したものである。
【0073】
集光位置算出装置26は、制御装置3bからのスキャナ制御信号に基づいて自機1bによるレーザ光の照射方向を算出し、当該レーザ光に対する散乱光が集光(入射)する受光器16の受光面上の位置を算出する機能を有するものである。そして、集光位置算出装置26は、算出した集光(入射)位置を示す集光位置信号をシャッター制御装置22cに出力する。
【0074】
シャッター制御装置22cは、集光位置算出装置26からの集光位置信号に従って、シャッター21を制御する機能を有するものである。このシャッター制御装置22cは、集光位置信号により指定された位置に対応する全てのシャッター素子を開き、その他の全てのシャッター素子を閉じるよう指示するシャッター制御信号を生成する。そして、シャッター制御装置22cは、生成したシャッター制御信号をシャッター21に出力する。
その他の装置は、図7に示す実施の形態2における各装置と同じ機能を有する。
【0075】
ここで、実施の形態4に係るレーザレーダシステムでは、実施の形態2に係るレーザレーダシステムと比較して、受光器16の受光面に集光しないクロストークによる散乱光を減衰させることができ、クロストークによる誤りを回避することができるという効果を有している。
【0076】
例えばクロストークによる散乱光が受信視野外から入射した場合、当該散乱光は受光面には集光されず、受信レンズ15を支持するレンズ鏡筒や、レーザ測距装置筐体の壁面に当たり、その位置から再び散乱光が生成される。また、受信レンズ15表面においても、再び散乱光が生成される可能性がある。そして、当該散乱光が受光面に照射された場合、自機1bでクロストークとして誤った距離信号を出力してしまう。
また、上記散乱光は、受光面において集光しないため、実施の形態2,3に係るレーザレーダシステムのように、シャッター21や信号シャッター24により受光面上の一部の領域での遮光や信号をカットすることではクロストークを回避できない。
【0077】
そこで、クロストークによる散乱光を減衰させるため、図14に示すように、自機1bによるレーザ光の照射方向から伝搬する散乱光のみを通過させるようにシャッター素子を開き、その他のシャッター素子を全て閉じておく。これにより、クロストークによる散乱光の受光量を大幅に減衰させることができる。
例えば、クロストークによる散乱光が受光面全体に照射されるとし、シャッター素子が100×100素子の2次元配列で構成されているとし、レーザ光の照射方向から伝搬する散乱光の集光スポットサイズがシャッター素子以下とすると、上記動作によりクロストークによる散乱光の受光量を1/10000に減衰させることができる。
そして、クロストークによる散乱光による受光量を減衰させた結果、クロストークによる受信信号も減衰する。そのため、受信信号が距離算出装置17の検出限界を下回る場合には、誤った距離信号を出力することはなく、クロストークによる誤りを回避することが可能となる。
【0078】
なお、集光位置算出装置26において算出される、レーザ光の照射方向から伝搬する散乱光の受光面上の集光位置hLは、レーザ照射方向をθL、受信レンズ15の焦点距離をfとすると、下式(3)で表される。
hL=f×θL (3)
【0079】
なお、シャッター21は、シャッター素子を2次元状に配置したが、1次元状に配置してもよい。ここで、シャッター21を1次元状配置とすることで、部品点数を減らすことが可能となり、また、シャッター制御装置22cにおける制御信号の生成量を減少させることが可能となり、動作を高速化することが可能となる
【0080】
また、発振器19で生成・出力する変調信号はCW変調でもよい。なお、CW変調の場合には、距離算出装置17では、当該変調信号と受信信号との位相差に基づいて対象物までの距離を算出する。
【0081】
また、距離算出装置17における変調制御信号と受信信号との時間差による距離算出方法としては、レーザ発振時間から受信信号検出時間までのクロック数をカウントする方法、パルス波形を逐次AD変換してパルスピークを検出する方法や、非特許文献1に示すような時間に比例して増加するランプ電圧とサンプルホールド回路を用いた方法等、各種方法が適用可能である。
【0082】
また、スキャナ13は、2次元走査を行うものとしたが、1次元走査を行うものでもよい。なお、1次元走査を行うスキャナ13を用いた場合には、ラインセンサとなり1次元の距離データを取得できる。
【0083】
以上のように、この実施の形態4によれば、集光位置算出装置26にて、自機によるレーザ光に対する散乱光が集光する位置を算出し、当該集光位置に該当する全てのシャッター素子を開き、その他の全てのシャッター素子を閉じるように構成したので、実施の形態2と比較して、受光器16の受光面に集光しないクロストークによる散乱光を減衰させることができ、クロストークによる誤りを回避することができる。
【0084】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0085】
1,1b,2,2b レーザ測距装置、3,3b 制御装置、11 レーザ装置、12 変調器、13 スキャナ、14 スキャナ角度モニタ装置、15 受信レンズ、16 受光器、17 距離算出装置、18 信号処理装置、19 発振器、20 クロストーク領域判別装置、21 シャッター、22,22b,22c シャッター制御装置、23 アレイ状受光器、24 信号シャッター、25 信号加算装置、26 集光位置算出装置。
【特許請求の範囲】
【請求項1】
対象物の測距を行う複数のレーザ測距装置と、前記各レーザ測距装置を制御する制御装置とを備えたレーザレーダシステムであって、
前記レーザ測距装置は、
前記制御装置による制御に従って、所定の変調信号でレーザ光を変調し、前記対象物に向けて走査するレーザ光送信手段と、
前記レーザ光送信手段により走査されたレーザ光に対する前記対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、
前記散乱光受信手段により変換された電気信号と前記変調信号との時間差または位相差に基づいて前記対象物までの距離を算出する距離算出手段とを備え、
前記制御装置は、
前記各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる
ことを特徴とするレーザレーダシステム。
【請求項2】
前記制御装置は、前記レーザ測距装置ごとに異なるパルス変調タイミングを指定する変調制御信号を生成し、
前記レーザ光送信手段は、前記変調信号に代えて前記制御装置により生成された変調制御信号を用いる
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項3】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記各レーザ測距装置は、
前記散乱光受信手段の受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッターと、
前記制御信号に基づいて、自機と他のレーザ測距装置によるレーザ光の照射方向が重なるかを判別するクロストーク領域判別手段と、
前記クロストーク領域判別手段により照射方向が重なると判別された場合に、前記シャッターを制御して、前記照射方向が重なる領域からの散乱光が入射する位置に対応するシャッター素子を閉じさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項4】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記散乱光受信手段は、対応する位置に入射した散乱光を受光し、電気信号に変換する複数の受光素子を有する受光器を備え、
前記各レーザ測距装置は、
前記受光器の後段に配置され、指定された受光素子からの電気信号をカットする信号シャッターと、
前記制御信号に基づいて、自機と他のレーザ測距装置によるレーザ光の照射方向が重なるかを判別するクロストーク領域判別手段と、
前記クロストーク領域判別手段により照射方向が重なると判別された場合に、前記信号シャッターを制御して、前記照射方向が重なる領域からの散乱光が入射する位置に対応する受光素子からの電気信号をカットさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項5】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記各レーザ測距装置は、
前記散乱光受信手段の受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッターと、
前記制御信号に基づいて自機によるレーザ光の照射方向を算出し、当該レーザ光に対する散乱光が入射する位置を算出する入射位置算出手段と、
前記シャッターを制御して、前記入射位置算出手段により算出された散乱光の入射位置に対応するシャッター素子を開かせ、それ以外のシャッター素子を閉じさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項6】
対象物の測距を行うレーザ測距装置であって、
制御装置による、複数の前記レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる制御に従って、所定の変調信号でレーザ光を変調し、前記対象物に向けて走査するレーザ光送信手段と、
前記レーザ光送信手段により走査されたレーザ光に対する前記対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、
前記散乱光受信手段により変換された電気信号と前記変調信号との時間差または位相差に基づいて前記対象物までの距離を算出する距離算出手段とを備えた
ことを特徴とするレーザ測距装置。
【請求項7】
対象物の測距を行う複数のレーザ測距装置を制御する制御装置であって、
前記各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる
ことを特徴とする制御装置。
【請求項1】
対象物の測距を行う複数のレーザ測距装置と、前記各レーザ測距装置を制御する制御装置とを備えたレーザレーダシステムであって、
前記レーザ測距装置は、
前記制御装置による制御に従って、所定の変調信号でレーザ光を変調し、前記対象物に向けて走査するレーザ光送信手段と、
前記レーザ光送信手段により走査されたレーザ光に対する前記対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、
前記散乱光受信手段により変換された電気信号と前記変調信号との時間差または位相差に基づいて前記対象物までの距離を算出する距離算出手段とを備え、
前記制御装置は、
前記各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる
ことを特徴とするレーザレーダシステム。
【請求項2】
前記制御装置は、前記レーザ測距装置ごとに異なるパルス変調タイミングを指定する変調制御信号を生成し、
前記レーザ光送信手段は、前記変調信号に代えて前記制御装置により生成された変調制御信号を用いる
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項3】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記各レーザ測距装置は、
前記散乱光受信手段の受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッターと、
前記制御信号に基づいて、自機と他のレーザ測距装置によるレーザ光の照射方向が重なるかを判別するクロストーク領域判別手段と、
前記クロストーク領域判別手段により照射方向が重なると判別された場合に、前記シャッターを制御して、前記照射方向が重なる領域からの散乱光が入射する位置に対応するシャッター素子を閉じさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項4】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記散乱光受信手段は、対応する位置に入射した散乱光を受光し、電気信号に変換する複数の受光素子を有する受光器を備え、
前記各レーザ測距装置は、
前記受光器の後段に配置され、指定された受光素子からの電気信号をカットする信号シャッターと、
前記制御信号に基づいて、自機と他のレーザ測距装置によるレーザ光の照射方向が重なるかを判別するクロストーク領域判別手段と、
前記クロストーク領域判別手段により照射方向が重なると判別された場合に、前記信号シャッターを制御して、前記照射方向が重なる領域からの散乱光が入射する位置に対応する受光素子からの電気信号をカットさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項5】
前記制御装置は、前記各レーザ測距装置に同一の照射方向を指定する制御信号を生成し、
前記各レーザ測距装置は、
前記散乱光受信手段の受光面の前段に配置され、閉じることで対応する位置に入射した光を遮光する複数のシャッター素子を有するシャッターと、
前記制御信号に基づいて自機によるレーザ光の照射方向を算出し、当該レーザ光に対する散乱光が入射する位置を算出する入射位置算出手段と、
前記シャッターを制御して、前記入射位置算出手段により算出された散乱光の入射位置に対応するシャッター素子を開かせ、それ以外のシャッター素子を閉じさせるシャッター制御手段とを備えた
ことを特徴とする請求項1記載のレーザレーダシステム。
【請求項6】
対象物の測距を行うレーザ測距装置であって、
制御装置による、複数の前記レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる制御に従って、所定の変調信号でレーザ光を変調し、前記対象物に向けて走査するレーザ光送信手段と、
前記レーザ光送信手段により走査されたレーザ光に対する前記対象物からの散乱光を受光し、電気信号に変換する散乱光受信手段と、
前記散乱光受信手段により変換された電気信号と前記変調信号との時間差または位相差に基づいて前記対象物までの距離を算出する距離算出手段とを備えた
ことを特徴とするレーザ測距装置。
【請求項7】
対象物の測距を行う複数のレーザ測距装置を制御する制御装置であって、
前記各レーザ測距装置によるレーザ光の重なりを回避するように、または、当該重なる領域を指定するように、当該各レーザ光の所定諸言を同期させる
ことを特徴とする制御装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】

【図10】
【図11】

【図12】

【図13】

【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−113670(P2013−113670A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259084(P2011−259084)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]