
レーザーガイド医療機器自動位置決めシステム及び方法
【課題】 医療機器が自動的に位置決めするフローを簡単にし、自動位置決めの技術問題を解決し、患者の体験を改善することを目的とする。
【解決手段】 医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、レーザー発射装置から発射するレーザーが患者体表の目標に照射し、撮影装置はレーザー照射点に対して撮影し、計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、医療機器は計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする。撮影装置の採集頻度はレーザーパルス周波数の二倍で、隣り合った2枚の画像に対して輪郭計算してレーザー照射点位置が得られる。
【解決手段】 医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、レーザー発射装置から発射するレーザーが患者体表の目標に照射し、撮影装置はレーザー照射点に対して撮影し、計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、医療機器は計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする。撮影装置の採集頻度はレーザーパルス周波数の二倍で、隣り合った2枚の画像に対して輪郭計算してレーザー照射点位置が得られる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、医療機器の領域に関し、医療映像装置及び治療システムを含み、特にX線装置及びシステムに関し、体表の照射目標を介して位置決めすることで、患者の体の位置決めが行われる。
【背景技術】
【0002】
X線照射は患者の体の表面の特定位置に対して正確な位置決めを行う必要がある。正確且つ速く位置決めすることは成功に照射するポイントで、全体の照射時間を短くして患者の被曝又は苦痛を減らすことができる。
【0003】
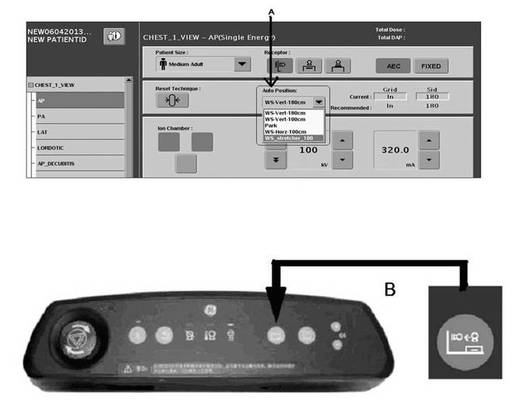
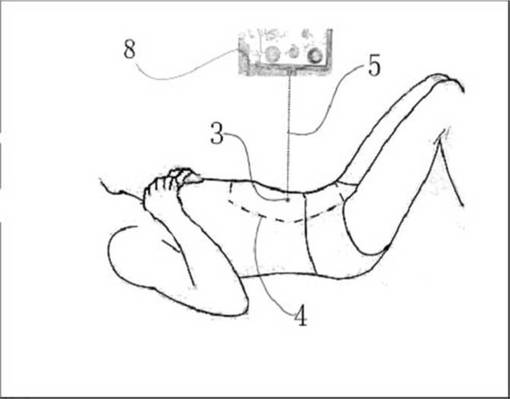
従来、自動位置決めの機能を有するディジタルX線システム(例えば、GE社のDefinium8000システム、図1を参照)は、患者に対する位置決めするに際して以下のステップを含んでいる。(ステップ1)患者を選択する、(ステップ2)X線管フレームOTS(overhead tube suspension)の最初位置を選択する(図1.1のプルダウン・メニューAに示されたように)、(ステップ3)自動位置決めボタンB(図1.2のコントロールパネルを参照)を押圧すると、OTSが目標位置に向かって移動し、OTSが目標位置まで移動したとき該ボタンを離す、(ステップ4)患者を指示して(胸フレームの前、床の上またはその他の位置)席につく、(ステップ5)マニュアルでX線管を移動及び/又は回転して患者の体表の照射目標箇所に位置決めし、再び照射視野FOV(field of view)などを確認する。照射視野を確認するとき、中心線を患者の体表の照射目標にアライメントさせる。例えば、図2に示されたように、横になっている位置に対しては、X線管(8)から発射した中心X線(5)が患者に垂直しながら体表の照射目標(3)の真上の所定の箇所に位置し、体表の照射目標(3)が照射視野FOV(4)の中心に位置することが好ましい。
【0004】
上記の説明から分かるように、これらのシステムは完全に自動的に患者に対して位置決めすることができない。なお、OTSは自動的に目標位置に移動するが、X線管の移動及び/又は回転はマニュアルで行う。この方法で患者の体表の照射目標の正確な位置決めを行うと、かかる時間が長く、フローが複雑である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,590,655号公報
【特許文献2】米国特許第5,598,269号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の問題を解決するため、本発明は患者の体表の照射目標に対して正確に位置決めするレーザーガイド医療機器自動位置決めシステム及び方法を提供することを目的とする。
【0007】
特許文献1ではレーザーガイドの内傷位置決め装置を開示したが、体表の照射目標に対して位置決めすることではない。特許文献2ではCTコンピュータ断層撮影装置を協力して位置決めする移動可能であるレーザーガイド位置決め装置を開示したが、この装置がレーザー光源及びファン光源となる2つの光源を備えるので、構成が複雑で操作が簡便でない。
【課題を解決するための手段】
【0008】
上記の問題に鑑みて、本発明は医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、レーザー発射装置から発射するレーザーが患者体表の目標に照射し、撮影装置はレーザー照射点に対して撮影し、計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、医療機器は計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする。
【0009】
レーザー発射装置は手持ち型である。
レーザー発射装置は制御器を有し、持続的にレーザーパルスを発射するように制御する。
レーザー発射装置の制御器は一旦持続的にレーザーパルスを発射すると該制御器が撮影装置をトリガーして撮影し、撮影装置の採集頻度はレーザーパルスの発射周波数より高い。
【0010】
撮影装置の採集頻度はレーザーパルス周波数の二倍である。
計算装置は撮影装置が獲得した隣り合う画像に対して輪郭計算を行い、レーザー照射点位置が得られる。
レーザー照射点位置が所定の時間帯で安定を保持することを計算装置が得られると、レーザー発射装置がレーザーパルスの発射を停止する。
【0011】
所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られたレーザー照射点位置の差が予め確定した閾値より小さいことを示す。
少なくとも3つの撮影装置を備え、医療機器が位置している環境の周囲に配置される。
医療機器はX線診断装置で、撮影装置はディジタルカメラである。
【0012】
本発明の医療機器の位置決め方法は、
ステップ1)レーザーを発射して患者体表の目標に照射し、
ステップ2)レーザー照射点に対して撮影し、
ステップ3)撮影して得られた画像に対して計算し、レーザー照射点位置が得られ、
ステップ4)医療機器が計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする、ステップを備える。
【0013】
ステップ1)では手持ち型のレーザー発射装置でレーザーの発射が行われる。
ステップ1)は
1.3)持続的にレーザーパルスを発射し始め、
1.4)一旦持続的にレーザーパルスを発射し始めると、制御器が撮影装置をトリガーして撮影し始めるステップを有する。
【0014】
ステップ2)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数より高い。
ステップ3)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数の二倍である。
【0015】
ステップ3)では獲得された隣り合う画像に対して輪郭計算を行い、レーザー照射点位置が得られる。
ステップ3)でレーザー照射点位置が所定の時間帯で安定を保持することを計算して得られると、ステップ1)を停止し、すなわちレーザーパルスの発射を停止する。
【0016】
ステップ3)で所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られたレーザー照射点位置の差が予め確定した閾値より小さいことを示す。
ステップ3)では少なくとも3つの撮影装置レーザー照射点に対して撮影する。
医療機器はX線診断装置で、撮影装置はディジタルカメラである。
【発明の効果】
【0017】
本発明は医療機器が自動的に位置決めするフローを簡単にし、自動位置決めの技術問題を解決し、患者の体験を改善することができる。
【図面の簡単な説明】
【0018】
【図1】従来の自動位置決め機能を有するディジタルX線システム、GE社のDefinium8000システムのユーザ操作インターフェース及び関連するボタンを示している。
【図2】医療機器が横になっている患者に対する位置決めを示した図である。
【図3】本発明に係る医療機器の位置決めシステムの組織構成図である。
【図4】撮影により得られた隣り合う画像に対して計算してレーザー照射点位置を獲得する原理図である。
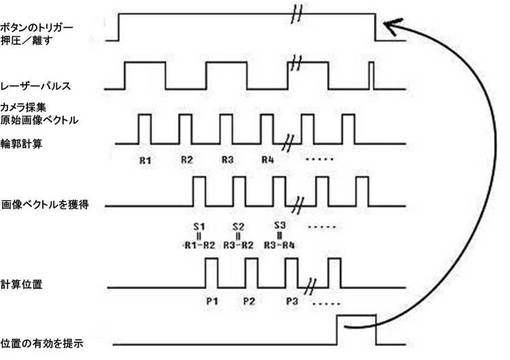
【図5】本発明に係る医療機器の位置決め方法の制御時系列図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について詳しく説明するが、本発明はこの実施形態に限られない。
以下、図面を参照しながら本発明の実施形態について説明し、これらの実施形態は本発明を制限するものではない。なお、異なる図面における同じ部材は同じ符号を付して説明する。
【0020】
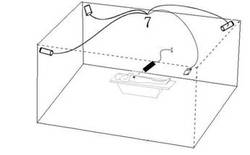
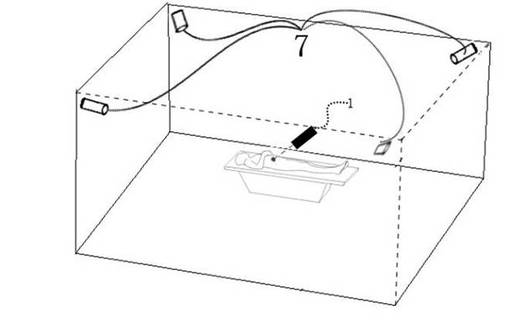
1つの実施形態は図3に示された医療機器の位置決めシステムで、特にX線診断装置である。なお、医療機器(すなわち、X線診断装置)の自身は示されていない。位置決め部材においてレーザー発生装置は手持ち型のレーザーパルス発射ペン(1)で、その上にはレーザーパルスの発射を制御するボタンがある。操作者がレーザーパルス発射ペンを手で持って、ボタンを押圧すると連続的なレーザーパルスが発射され、そのレーザーパルスを患者の体表の照射目標に向かう。位置決め部材は複数のディジタルカメラをさらに含み、図面には照射室の天頂の4つの隅に配置された4つのディジタルカメラ(7)が示され、照射室の中心又は患者の所在位置に向かっている。レーザーペンがレーザーパルスを発射すると、すべてのディジタルカメラがすぐトリガーされて撮影し始め、撮影の頻度がレーザーパルスの発射周波数より高い。前記撮影装置の採集頻度をレーザーパルス周波数の二倍にすることが好ましい。これはレーザーパルスの山、谷の2つの位相で画像を1枚ずつ採集するからである。4つの方向にディジタルカメラが配置されているので、レーザー照射点は必ず1つ又は複数のディジタルカメラに撮影される。なお、ディジタルカメラが獲得したレーザー照射点の画像を医療機器の計算装置(図示しない)に伝送する。図4に示されたように、計算装置は絶えずカメラが獲得した2枚の隣り合う画像に対して輪郭計算を行って絶えずレーザー照射点位置(カメラが獲得した照射点位置の画像を照射点位置の座標に変換する具体的な方法は以下で説明する)が得られる。レーザー照射点位置を獲得し始めたときから、同時に計算装置が絶えず照射点位置の変化を計算する。照射点位置が所定の時間帯で安定を保持していることを発見したとき、例えば1秒内に得られた任意の二回のレーザー照射点位置の差が予め確定した閾値より小さければ、システムがブザーを鳴らし、操作者にレーザー発射ボタンを離してレーザーの発射及び位置決め操作を停止するようにメッセージする。
【0021】
カメラが得られた透視画像を画像平面に投影して三次元座標点を得る計算方法はピンホールカメラモデル(pinhole camera model)であり、これは従来技術(インターネット百科全書 Wikipedia http://en.wikipedia.org/wiki/Pinhole camera model)である。なお、仮にレーザー照射点位置座標が(X0,Y0,Z0)で行列あれば、Z0は計算する必要がない。これはX線光源から検出器までの距離source to image-receptor distance(SID)はシステム(照射部位に基づいて)が予め設定されているからである。そのため、システムは中心X線が照射平面での平面座標(X0,Y0)のみを計算すればよい。
【0022】
計算に応用される数式は以下のとおりである。
【数1】

… (1)
又は、
【数2】
… (2)
【0023】
なお、(X,Y,Z)は照射室座標空間内の1つの点の三次元座標で、(u、v)は投影点の画素座標である。Aはカメラ行列又は内部パラメータ行列と称され、(cx、cy)は画像中心である主点(一般的に光学的な中心である)の座標で、fx、fyは画素で示された焦点距離である。数式(1)又は数式(2)によれば、画像があるパラメータに基づいて拡大又は縮小されると、すべてのこれらのパラメータも対応して拡大又は縮小される(該パラメータを乗算又は除算する)。内部パラメータ行列はカメラ視野の変化により変化せず、焦点距離が変わらなければ一度確定すると繰り返して使用することができる。連合回転平行移動行列[R/t]は外部パラメータ行列と称され、カメラがある静止点を回して回転することを説明し、又はカメラを固定して照射目標がカメラの前で回転することを説明する。これにより、[R/t]がカメラに基づいて画像の上のある点の座標(X,Y,Z)をある座標システムに投影することができる。該変換数式(Z≠0のとき)は以下のとおりである。
【数3】
… (3)
【0024】
これにより、レーザー照射点の目標点の位置(X0,Y0)は、異なるカメラが同一の時刻に獲得した画像に対して上述の計算を行って獲得される。
【0025】
本発明の別の実施形態は、図5の制御時系列図に示された医療機器の位置決め方法で、特に例えばX線診断装置の位置決め方法で、以下のステップを含んでいる。
【0026】
1)操作者がレーザーパルス発射ペンを手で持って、ボタンを押圧すると持続的にレーザーパルスが発射され、そのレーザーパルスを患者の体表の照射目標に向かう。
【0027】
2)X線照射室環境の周囲に、分散的に複数(少なくとも3つ)のディジタルカメラが配置されて患者に対して撮影し、一旦レーザー発射ペンのレーザー発射ボタンが押圧されると、持続的にレーザーパルスが発射され、該レーザーパルスがレーザー照射点に対して撮影するように各カメラをトリガーし、撮影の頻度がレーザーパルスの発射周波数より高い。前記撮影装置の採集頻度をレーザーパルス周波数の二倍にすることが好ましい。これはレーザーパルスの山、谷の2つの位相で1枚の画像を採集するからである。
【0028】
3)絶えず撮影して獲得した2枚の隣り合う画像に対して輪郭計算計算を行って絶えず前記レーザー照射点位置が得られる。
【0029】
4)カメラがレーザー照射点の原始画像のベクトルを獲得したときから、現有の計算方法(上述を参照)を応用してカメラが得られた照射点位置の画像を照射点位置の座標(ベクトル)に変換する。
【0030】
5)同時に、得られた照射点位置との間の距離を絶えず計算する。
【0031】
6)照射点位置が所定の時間帯で安定を保持していることを発見したとき、例えば1秒内に得られた任意の二回のレーザー照射点位置の距離が予め確定した閾値より小さい又は同じで行列ば、システムがブザーを鳴らし、患者の体表目標の位置が獲得され、操作者にレーザー発射ボタンを離してレーザーの発射及び位置決め操作を停止するようにメッセージする。
【0032】
7)X線診断装置は得られた患者の体表目標位置に基づいてOTS及び/又はX線管を案内して自動的に位置決めが行われ、すなわち、患者の体表目標に対して照射する適当な位置に自動的に移動する。
【0033】
本発明は医療機器の位置決めシステム及び方法に関し、正確に位置決めする必要がある診断装置又は治療装置に応用され、X線システム以外にもコンピュータX線断層撮影装置(CT、X-ray computed tomography)、MR磁気共鳴装置、陽電子放出断層撮影装置(PET,positron
emission tomography)などに応用される。
【0034】
上述のように本発明の具体的な実施例について図面を参照しながら説明したが、当業者は本発明の主旨及び範囲を逸脱しない範囲で、本発明に対して様々な変形、修正及び改良を加えて実施することができる。これらの変形、修正及び改良は本発明の請求の範囲が限定する主旨及び範囲内である。
【技術分野】
【0001】
本発明は、医療機器の領域に関し、医療映像装置及び治療システムを含み、特にX線装置及びシステムに関し、体表の照射目標を介して位置決めすることで、患者の体の位置決めが行われる。
【背景技術】
【0002】
X線照射は患者の体の表面の特定位置に対して正確な位置決めを行う必要がある。正確且つ速く位置決めすることは成功に照射するポイントで、全体の照射時間を短くして患者の被曝又は苦痛を減らすことができる。
【0003】
従来、自動位置決めの機能を有するディジタルX線システム(例えば、GE社のDefinium8000システム、図1を参照)は、患者に対する位置決めするに際して以下のステップを含んでいる。(ステップ1)患者を選択する、(ステップ2)X線管フレームOTS(overhead tube suspension)の最初位置を選択する(図1.1のプルダウン・メニューAに示されたように)、(ステップ3)自動位置決めボタンB(図1.2のコントロールパネルを参照)を押圧すると、OTSが目標位置に向かって移動し、OTSが目標位置まで移動したとき該ボタンを離す、(ステップ4)患者を指示して(胸フレームの前、床の上またはその他の位置)席につく、(ステップ5)マニュアルでX線管を移動及び/又は回転して患者の体表の照射目標箇所に位置決めし、再び照射視野FOV(field of view)などを確認する。照射視野を確認するとき、中心線を患者の体表の照射目標にアライメントさせる。例えば、図2に示されたように、横になっている位置に対しては、X線管(8)から発射した中心X線(5)が患者に垂直しながら体表の照射目標(3)の真上の所定の箇所に位置し、体表の照射目標(3)が照射視野FOV(4)の中心に位置することが好ましい。
【0004】
上記の説明から分かるように、これらのシステムは完全に自動的に患者に対して位置決めすることができない。なお、OTSは自動的に目標位置に移動するが、X線管の移動及び/又は回転はマニュアルで行う。この方法で患者の体表の照射目標の正確な位置決めを行うと、かかる時間が長く、フローが複雑である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第5,590,655号公報
【特許文献2】米国特許第5,598,269号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の問題を解決するため、本発明は患者の体表の照射目標に対して正確に位置決めするレーザーガイド医療機器自動位置決めシステム及び方法を提供することを目的とする。
【0007】
特許文献1ではレーザーガイドの内傷位置決め装置を開示したが、体表の照射目標に対して位置決めすることではない。特許文献2ではCTコンピュータ断層撮影装置を協力して位置決めする移動可能であるレーザーガイド位置決め装置を開示したが、この装置がレーザー光源及びファン光源となる2つの光源を備えるので、構成が複雑で操作が簡便でない。
【課題を解決するための手段】
【0008】
上記の問題に鑑みて、本発明は医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、レーザー発射装置から発射するレーザーが患者体表の目標に照射し、撮影装置はレーザー照射点に対して撮影し、計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、医療機器は計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする。
【0009】
レーザー発射装置は手持ち型である。
レーザー発射装置は制御器を有し、持続的にレーザーパルスを発射するように制御する。
レーザー発射装置の制御器は一旦持続的にレーザーパルスを発射すると該制御器が撮影装置をトリガーして撮影し、撮影装置の採集頻度はレーザーパルスの発射周波数より高い。
【0010】
撮影装置の採集頻度はレーザーパルス周波数の二倍である。
計算装置は撮影装置が獲得した隣り合う画像に対して輪郭計算を行い、レーザー照射点位置が得られる。
レーザー照射点位置が所定の時間帯で安定を保持することを計算装置が得られると、レーザー発射装置がレーザーパルスの発射を停止する。
【0011】
所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られたレーザー照射点位置の差が予め確定した閾値より小さいことを示す。
少なくとも3つの撮影装置を備え、医療機器が位置している環境の周囲に配置される。
医療機器はX線診断装置で、撮影装置はディジタルカメラである。
【0012】
本発明の医療機器の位置決め方法は、
ステップ1)レーザーを発射して患者体表の目標に照射し、
ステップ2)レーザー照射点に対して撮影し、
ステップ3)撮影して得られた画像に対して計算し、レーザー照射点位置が得られ、
ステップ4)医療機器が計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする、ステップを備える。
【0013】
ステップ1)では手持ち型のレーザー発射装置でレーザーの発射が行われる。
ステップ1)は
1.3)持続的にレーザーパルスを発射し始め、
1.4)一旦持続的にレーザーパルスを発射し始めると、制御器が撮影装置をトリガーして撮影し始めるステップを有する。
【0014】
ステップ2)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数より高い。
ステップ3)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数の二倍である。
【0015】
ステップ3)では獲得された隣り合う画像に対して輪郭計算を行い、レーザー照射点位置が得られる。
ステップ3)でレーザー照射点位置が所定の時間帯で安定を保持することを計算して得られると、ステップ1)を停止し、すなわちレーザーパルスの発射を停止する。
【0016】
ステップ3)で所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られたレーザー照射点位置の差が予め確定した閾値より小さいことを示す。
ステップ3)では少なくとも3つの撮影装置レーザー照射点に対して撮影する。
医療機器はX線診断装置で、撮影装置はディジタルカメラである。
【発明の効果】
【0017】
本発明は医療機器が自動的に位置決めするフローを簡単にし、自動位置決めの技術問題を解決し、患者の体験を改善することができる。
【図面の簡単な説明】
【0018】
【図1】従来の自動位置決め機能を有するディジタルX線システム、GE社のDefinium8000システムのユーザ操作インターフェース及び関連するボタンを示している。
【図2】医療機器が横になっている患者に対する位置決めを示した図である。
【図3】本発明に係る医療機器の位置決めシステムの組織構成図である。
【図4】撮影により得られた隣り合う画像に対して計算してレーザー照射点位置を獲得する原理図である。
【図5】本発明に係る医療機器の位置決め方法の制御時系列図である。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について詳しく説明するが、本発明はこの実施形態に限られない。
以下、図面を参照しながら本発明の実施形態について説明し、これらの実施形態は本発明を制限するものではない。なお、異なる図面における同じ部材は同じ符号を付して説明する。
【0020】
1つの実施形態は図3に示された医療機器の位置決めシステムで、特にX線診断装置である。なお、医療機器(すなわち、X線診断装置)の自身は示されていない。位置決め部材においてレーザー発生装置は手持ち型のレーザーパルス発射ペン(1)で、その上にはレーザーパルスの発射を制御するボタンがある。操作者がレーザーパルス発射ペンを手で持って、ボタンを押圧すると連続的なレーザーパルスが発射され、そのレーザーパルスを患者の体表の照射目標に向かう。位置決め部材は複数のディジタルカメラをさらに含み、図面には照射室の天頂の4つの隅に配置された4つのディジタルカメラ(7)が示され、照射室の中心又は患者の所在位置に向かっている。レーザーペンがレーザーパルスを発射すると、すべてのディジタルカメラがすぐトリガーされて撮影し始め、撮影の頻度がレーザーパルスの発射周波数より高い。前記撮影装置の採集頻度をレーザーパルス周波数の二倍にすることが好ましい。これはレーザーパルスの山、谷の2つの位相で画像を1枚ずつ採集するからである。4つの方向にディジタルカメラが配置されているので、レーザー照射点は必ず1つ又は複数のディジタルカメラに撮影される。なお、ディジタルカメラが獲得したレーザー照射点の画像を医療機器の計算装置(図示しない)に伝送する。図4に示されたように、計算装置は絶えずカメラが獲得した2枚の隣り合う画像に対して輪郭計算を行って絶えずレーザー照射点位置(カメラが獲得した照射点位置の画像を照射点位置の座標に変換する具体的な方法は以下で説明する)が得られる。レーザー照射点位置を獲得し始めたときから、同時に計算装置が絶えず照射点位置の変化を計算する。照射点位置が所定の時間帯で安定を保持していることを発見したとき、例えば1秒内に得られた任意の二回のレーザー照射点位置の差が予め確定した閾値より小さければ、システムがブザーを鳴らし、操作者にレーザー発射ボタンを離してレーザーの発射及び位置決め操作を停止するようにメッセージする。
【0021】
カメラが得られた透視画像を画像平面に投影して三次元座標点を得る計算方法はピンホールカメラモデル(pinhole camera model)であり、これは従来技術(インターネット百科全書 Wikipedia http://en.wikipedia.org/wiki/Pinhole camera model)である。なお、仮にレーザー照射点位置座標が(X0,Y0,Z0)で行列あれば、Z0は計算する必要がない。これはX線光源から検出器までの距離source to image-receptor distance(SID)はシステム(照射部位に基づいて)が予め設定されているからである。そのため、システムは中心X線が照射平面での平面座標(X0,Y0)のみを計算すればよい。
【0022】
計算に応用される数式は以下のとおりである。
【数1】
… (1)
又は、
【数2】
… (2)
【0023】
なお、(X,Y,Z)は照射室座標空間内の1つの点の三次元座標で、(u、v)は投影点の画素座標である。Aはカメラ行列又は内部パラメータ行列と称され、(cx、cy)は画像中心である主点(一般的に光学的な中心である)の座標で、fx、fyは画素で示された焦点距離である。数式(1)又は数式(2)によれば、画像があるパラメータに基づいて拡大又は縮小されると、すべてのこれらのパラメータも対応して拡大又は縮小される(該パラメータを乗算又は除算する)。内部パラメータ行列はカメラ視野の変化により変化せず、焦点距離が変わらなければ一度確定すると繰り返して使用することができる。連合回転平行移動行列[R/t]は外部パラメータ行列と称され、カメラがある静止点を回して回転することを説明し、又はカメラを固定して照射目標がカメラの前で回転することを説明する。これにより、[R/t]がカメラに基づいて画像の上のある点の座標(X,Y,Z)をある座標システムに投影することができる。該変換数式(Z≠0のとき)は以下のとおりである。
【数3】
… (3)
【0024】
これにより、レーザー照射点の目標点の位置(X0,Y0)は、異なるカメラが同一の時刻に獲得した画像に対して上述の計算を行って獲得される。
【0025】
本発明の別の実施形態は、図5の制御時系列図に示された医療機器の位置決め方法で、特に例えばX線診断装置の位置決め方法で、以下のステップを含んでいる。
【0026】
1)操作者がレーザーパルス発射ペンを手で持って、ボタンを押圧すると持続的にレーザーパルスが発射され、そのレーザーパルスを患者の体表の照射目標に向かう。
【0027】
2)X線照射室環境の周囲に、分散的に複数(少なくとも3つ)のディジタルカメラが配置されて患者に対して撮影し、一旦レーザー発射ペンのレーザー発射ボタンが押圧されると、持続的にレーザーパルスが発射され、該レーザーパルスがレーザー照射点に対して撮影するように各カメラをトリガーし、撮影の頻度がレーザーパルスの発射周波数より高い。前記撮影装置の採集頻度をレーザーパルス周波数の二倍にすることが好ましい。これはレーザーパルスの山、谷の2つの位相で1枚の画像を採集するからである。
【0028】
3)絶えず撮影して獲得した2枚の隣り合う画像に対して輪郭計算計算を行って絶えず前記レーザー照射点位置が得られる。
【0029】
4)カメラがレーザー照射点の原始画像のベクトルを獲得したときから、現有の計算方法(上述を参照)を応用してカメラが得られた照射点位置の画像を照射点位置の座標(ベクトル)に変換する。
【0030】
5)同時に、得られた照射点位置との間の距離を絶えず計算する。
【0031】
6)照射点位置が所定の時間帯で安定を保持していることを発見したとき、例えば1秒内に得られた任意の二回のレーザー照射点位置の距離が予め確定した閾値より小さい又は同じで行列ば、システムがブザーを鳴らし、患者の体表目標の位置が獲得され、操作者にレーザー発射ボタンを離してレーザーの発射及び位置決め操作を停止するようにメッセージする。
【0032】
7)X線診断装置は得られた患者の体表目標位置に基づいてOTS及び/又はX線管を案内して自動的に位置決めが行われ、すなわち、患者の体表目標に対して照射する適当な位置に自動的に移動する。
【0033】
本発明は医療機器の位置決めシステム及び方法に関し、正確に位置決めする必要がある診断装置又は治療装置に応用され、X線システム以外にもコンピュータX線断層撮影装置(CT、X-ray computed tomography)、MR磁気共鳴装置、陽電子放出断層撮影装置(PET,positron
emission tomography)などに応用される。
【0034】
上述のように本発明の具体的な実施例について図面を参照しながら説明したが、当業者は本発明の主旨及び範囲を逸脱しない範囲で、本発明に対して様々な変形、修正及び改良を加えて実施することができる。これらの変形、修正及び改良は本発明の請求の範囲が限定する主旨及び範囲内である。
【特許請求の範囲】
【請求項1】
医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、
医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、
位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、前記レーザー発射装置から発射するレーザーが患者体表の目標に照射し、前記撮影装置はレーザー照射点に対して撮影し、前記計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、
前記医療機器は計算して得られた前記レーザー照射点位置に基づいて前記移動部材を自動的に位置決めする医療機器位置決めシステム。
【請求項2】
前記レーザー発射装置は手持ち型である請求項1に記載の医療機器位置決めシステム。
【請求項3】
前記レーザー発射装置は制御器を有し、持続的にレーザーパルスを発射するように制御する請求項1又は2に記載の医療機器位置決めシステム。
【請求項4】
前記レーザー発射装置の制御器は一旦持続的にレーザーパルスを発射すると該制御器が撮影装置をトリガーして撮影し、撮影装置の採集頻度はレーザーパルスの発射周波数より高い請求項3に記載の医療機器位置決めシステム。
【請求項5】
前記撮影装置の採集頻度はレーザーパルス周波数の二倍である請求項4に記載の医療機器位置決めシステム。
【請求項6】
前記計算装置は前記撮影装置が獲得した隣り合う画像に対して輪郭計算を行い、前記レーザー照射点位置が得られる請求項4又は5に記載の医療機器位置決めシステム。
【請求項7】
前記レーザー照射点位置が所定の時間帯で安定を保持することを計算装置が得られると、レーザー発射装置がレーザーパルスの発射を停止する請求項6に記載の医療機器位置決めシステム。
【請求項8】
前記所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られた前記レーザー照射点位置の差が予め確定した閾値より小さいことを示す請求項7に記載の医療機器位置決めシステム。
【請求項9】
少なくとも3つの撮影装置を備え、医療機器が位置している環境の周囲に配置される請求項1から請求項8のいずれか一項に記載の医療機器位置決めシステム。
【請求項10】
前記医療機器はX線診断装置で、前記撮影装置はディジタルカメラである請求項9に記載の医療機器位置決めシステム。
【請求項11】
ステップ1)レーザーを発射して患者体表の目標に照射し、
ステップ2)レーザー照射点に対して撮影し、
ステップ3)撮影して得られた画像に対して計算し、レーザー照射点位置が得られ、
ステップ4)医療機器が計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする、
ステップを備える医療機器の位置決め方法。
【請求項12】
前記ステップ1)では手持ち型のレーザー発射装置でレーザーの発射が行われる請求項11に記載の医療機器の位置決め方法。
【請求項13】
前記ステップ1)は
1.3)持続的にレーザーパルスを発射し始め、
1.4)一旦持続的にレーザーパルスを発射し始めると、制御器が撮影装置をトリガーして撮影し始める
ステップを有する請求項12に記載の医療機器の位置決め方法。
【請求項14】
前記ステップ2)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数より高い請求項13に記載の医療機器の位置決め方法。
【請求項15】
前記ステップ3)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数の二倍である請求項14に記載の医療機器の位置決め方法。
【請求項16】
前記ステップ3)では獲得された隣り合う画像に対して輪郭計算を行い、前記レーザー照射点位置が得られる請求項14又は15に記載の医療機器の位置決め方法。
【請求項17】
前記ステップ3)で前記レーザー照射点位置が所定の時間帯で安定を保持することを計算して得られると、前記ステップ1)を停止し、すなわちレーザーパルスの発射を停止する請求項16に記載の医療機器の位置決め方法。
【請求項18】
前記ステップ3)で前記所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られた前記レーザー照射点位置の差が予め確定した閾値より小さいことを示す請求項17に記載の医療機器の位置決め方法。
【請求項19】
前記ステップ3)では少なくとも3つの撮影装置が前記レーザー照射点に対して撮影する請求項12から請求項18のいずれか一項に記載の医療機器の位置決め方法。
【請求項20】
前記医療機器はX線診断装置で、前記撮影装置はディジタルカメラである請求項19に記載の医療機器の位置決め方法。
【請求項1】
医療機器本体と位置決め部材とを備える医療機器位置決めシステムであって、
医療機器は目標位置まで移動して診断又は治療が行われる移動部材を有し、
位置決め部材はレーザー発射装置、撮影装置及び計算装置を有し、前記レーザー発射装置から発射するレーザーが患者体表の目標に照射し、前記撮影装置はレーザー照射点に対して撮影し、前記計算装置は撮影装置が獲得した画像に対して計算してレーザー照射点位置が得られ、
前記医療機器は計算して得られた前記レーザー照射点位置に基づいて前記移動部材を自動的に位置決めする医療機器位置決めシステム。
【請求項2】
前記レーザー発射装置は手持ち型である請求項1に記載の医療機器位置決めシステム。
【請求項3】
前記レーザー発射装置は制御器を有し、持続的にレーザーパルスを発射するように制御する請求項1又は2に記載の医療機器位置決めシステム。
【請求項4】
前記レーザー発射装置の制御器は一旦持続的にレーザーパルスを発射すると該制御器が撮影装置をトリガーして撮影し、撮影装置の採集頻度はレーザーパルスの発射周波数より高い請求項3に記載の医療機器位置決めシステム。
【請求項5】
前記撮影装置の採集頻度はレーザーパルス周波数の二倍である請求項4に記載の医療機器位置決めシステム。
【請求項6】
前記計算装置は前記撮影装置が獲得した隣り合う画像に対して輪郭計算を行い、前記レーザー照射点位置が得られる請求項4又は5に記載の医療機器位置決めシステム。
【請求項7】
前記レーザー照射点位置が所定の時間帯で安定を保持することを計算装置が得られると、レーザー発射装置がレーザーパルスの発射を停止する請求項6に記載の医療機器位置決めシステム。
【請求項8】
前記所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られた前記レーザー照射点位置の差が予め確定した閾値より小さいことを示す請求項7に記載の医療機器位置決めシステム。
【請求項9】
少なくとも3つの撮影装置を備え、医療機器が位置している環境の周囲に配置される請求項1から請求項8のいずれか一項に記載の医療機器位置決めシステム。
【請求項10】
前記医療機器はX線診断装置で、前記撮影装置はディジタルカメラである請求項9に記載の医療機器位置決めシステム。
【請求項11】
ステップ1)レーザーを発射して患者体表の目標に照射し、
ステップ2)レーザー照射点に対して撮影し、
ステップ3)撮影して得られた画像に対して計算し、レーザー照射点位置が得られ、
ステップ4)医療機器が計算して得られた照射点位置に基づいて移動部材を自動的に位置決めする、
ステップを備える医療機器の位置決め方法。
【請求項12】
前記ステップ1)では手持ち型のレーザー発射装置でレーザーの発射が行われる請求項11に記載の医療機器の位置決め方法。
【請求項13】
前記ステップ1)は
1.3)持続的にレーザーパルスを発射し始め、
1.4)一旦持続的にレーザーパルスを発射し始めると、制御器が撮影装置をトリガーして撮影し始める
ステップを有する請求項12に記載の医療機器の位置決め方法。
【請求項14】
前記ステップ2)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数より高い請求項13に記載の医療機器の位置決め方法。
【請求項15】
前記ステップ3)ではレーザー照射点に対する撮影の採集頻度がレーザーパルスの発射周波数の二倍である請求項14に記載の医療機器の位置決め方法。
【請求項16】
前記ステップ3)では獲得された隣り合う画像に対して輪郭計算を行い、前記レーザー照射点位置が得られる請求項14又は15に記載の医療機器の位置決め方法。
【請求項17】
前記ステップ3)で前記レーザー照射点位置が所定の時間帯で安定を保持することを計算して得られると、前記ステップ1)を停止し、すなわちレーザーパルスの発射を停止する請求項16に記載の医療機器の位置決め方法。
【請求項18】
前記ステップ3)で前記所定の時間帯で安定を保持することは、計算装置が予め確定した所定の時間帯で複数回得られた前記レーザー照射点位置の差が予め確定した閾値より小さいことを示す請求項17に記載の医療機器の位置決め方法。
【請求項19】
前記ステップ3)では少なくとも3つの撮影装置が前記レーザー照射点に対して撮影する請求項12から請求項18のいずれか一項に記載の医療機器の位置決め方法。
【請求項20】
前記医療機器はX線診断装置で、前記撮影装置はディジタルカメラである請求項19に記載の医療機器の位置決め方法。
【図1】

【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−101046(P2012−101046A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2011−225406(P2011−225406)
【出願日】平成23年10月13日(2011.10.13)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成23年10月13日(2011.10.13)
【出願人】(300019238)ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー (1,125)
【Fターム(参考)】
[ Back to top ]