
レーザ光の焦点合わせ方法及び装置
【課題】透明部材同士の界面にレーザ光を照射して接合を行う際に、レーザ光の焦点を界面に正確に合わせることが可能な方法及び装置を提供すること。
【解決手段】レーザ照射装置100は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、接合用レーザ102から出射されるレーザ光の光軸方向と平行にレーザ光を出射するモニタ用レーザ114と、透明部材101a、101bを端面側から撮影するための計測部103と、を備える。レーザ照射中に計測部103により撮影される像から、モニタ用レーザ114の焦点における発光と、該焦点から界面をはさんで反対側の地点における発光との間の距離を測定することによって界面位置の変化を測定し、界面位置に焦点が合うように接合用レーザ102の位置を移動させることができる。
【解決手段】レーザ照射装置100は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、接合用レーザ102から出射されるレーザ光の光軸方向と平行にレーザ光を出射するモニタ用レーザ114と、透明部材101a、101bを端面側から撮影するための計測部103と、を備える。レーザ照射中に計測部103により撮影される像から、モニタ用レーザ114の焦点における発光と、該焦点から界面をはさんで反対側の地点における発光との間の距離を測定することによって界面位置の変化を測定し、界面位置に焦点が合うように接合用レーザ102の位置を移動させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、重ね合わされた透明な部材の界面にレーザ光を照射して行うレーザ接合において、レーザ光焦点を界面に合わせる方法及び装置に関する。
【背景技術】
【0002】
従来、ガラス等の透明部材同士の界面にレーザ光を照射して接合する手法が知られている。しかしながら、重ね合わせられた透明部材同士の界面を検出することは難しいため、その界面上にレーザ光の焦点を合わせることは困難である。そのため、レーザ光の焦点が界面からずれてしまい、接合が部分的に行われない、又は接合強度が低下してしまうという問題が発生することがあった。
【0003】
特許文献1に記載されている技術においては、重ね合わされた2枚の透明部材の界面にレーザ光の吸収剤を塗布してからレーザ光を照射し、溶接を行う。これにより、レーザ光の焦点が界面から多少ずれたとしても、レーザ光のエネルギーを界面上の吸収剤が吸収するため、透明部材同士の接合が行われる。
【0004】
特許文献2に記載されている技術は、被加工物の表面にレーザ光の焦点を合わせて溶接を行うための装置を提供する。そのために、溶接対象箇所に低出力のレーザ光を照射し、発生するプラズマの輝度を光センサにより計測する。レーザ光の焦点が表面に合っている時にプラズマ輝度が最大になるため、プラズマ輝度が最大になるようにレーザ光の焦点位置を調整することによって、高精度のレーザ溶接を実現している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−170290号公報
【特許文献2】特開昭59−218291号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示された技術では、レーザ光の焦点が透明部材同士の界面からずれたとしても接合が可能であるが、レーザ光の焦点を該界面に合わせるように補正することはできない。また、界面にレーザ光の吸収剤を塗布するためのコストと手間が必要であり、また吸収剤が接合後にも残留するという問題がある。
【0007】
特許文献2に開示された技術は、レーザ光を被加工物の表面に照射して溶接するものであるため、被加工物と空気との界面にレーザ光の焦点を合わせることを前提としている。その前提に基づけば、レーザ光の焦点が被加工物の表面に合っていない場合は、被加工物表面でのレーザスポット径が大きくなり、プラズマ輝度が変化する。しかしながら、この手法は、用いるレーザ光に対して透明な透明部材同士の界面を接合する際には適用できない。透明部材同士を密着させて重ね合わせると、用いるレーザに対して略一体となった透明体となる。その状態では、たとえレーザ光の焦点が透明部材同士の界面に合っていないとしても、焦点が透明部材中に位置することには変わりなく、プラズマ輝度の変化はほとんど起こらない。
【0008】
本発明の目的は、透明部材同士の界面にレーザ光を照射して接合を行う際に、レーザ光焦点を界面に合わせることが可能な方法及び装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明者は、上記の目的を達成するために鋭意研究を行った結果、重ね合わせた2つの少なくとも可視光に対して透明な透明部材の一方の内部に、該透明部材を透過するレーザ光を該透明部材の内部に焦点を合わせて照射し、プラズマを発生させた状態で、該2つの透明部材の端面側から目視又はカメラ撮影することにより、他方の透明部材の内部にも発光を観測できることを見出した。本明細書においては、焦点とは別に該発光が観測される場所を、反対点と呼ぶこととする。また、該プラズマ光と該発光とは、2つの透明部材の界面を挟んでほぼ等距離にあることも見出した。本発明は、この現象を利用することによって、レーザ光の焦点を界面に合わせることができる。
【0010】
本発明の第1の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光を出射する第1のレーザ光源と、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第2のレーザ光を出射する第2のレーザ光源と、前記第1のレーザ光を、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光する第1の集光レンズと、前記第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する第2の集光レンズと、前記第2の集光レンズを移動させる移動手段と、少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御する制御手段と、を備えることを特徴とする。
【0011】
本発明の第2の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光及び第2のレーザ光を切り替えて出射するレーザ光源と、前記第1及び第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する集光レンズと、前記集光レンズを移動させる移動手段と、少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、前記移動手段を制御する制御手段と、を備え、前記変位を取得する時には、前記レーザ光源が前記第1のレーザ光を出射し、前記集光レンズが前記第1のレーザ光を前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光するように作動し、前記界面の接合を行う時には、前記レーザ光源が前記第2のレーザ光を出射し、前記集光レンズが前記第2のレーザ光を前記第1及び第2の透明部材の内部に焦点を合わせるように集光し、前記制御手段が前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御するように作動することを特徴とする。
【0012】
本発明の第3の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射方法であって、重ね合された前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせて第1のレーザ光を照射することと、前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部に焦点を合わせて第2のレーザ光を照射することと、少なくとも前記第1のレーザ光が照射されている間に、前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測することと、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得することと、前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させることと、を備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、透明部材同士の接合時に、レーザ光の焦点を界面に正確に合わせることができ、高精度のレーザ接合を実現することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る、レーザ照射装置の概略図である。
【図2】(a)焦点が基準状態からずれていない場合の発光位置を表す模式図である。(b)焦点が基準状態からずれている場合の発光位置を表す模式図である。(c)焦点が基準状態からずれている場合の発光位置を表す模式図である。
【図3】(a)発光強度の分布を示す図である。(b)発光強度の分布を示す図である。
【図4】本発明の一実施形態に係る、レンズを移動させる移動部を制御するためのブロック図である。
【図5】接合動作の各ステップにおけるレーザ光照射位置を示す図である。
【図6】(a)焦点が界面に合っている場合の発光位置を表す模式図である。(b)焦点が界面に合っていない場合の発光位置を表す模式図である。
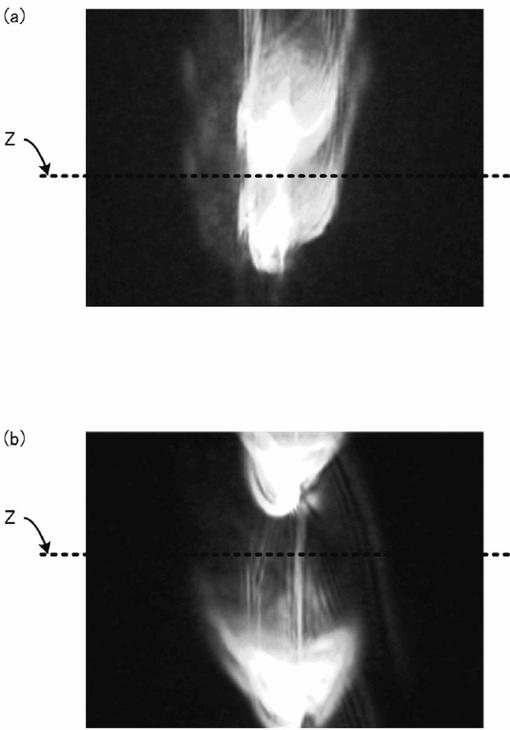
【図7】(a)焦点ずれが発生していない状態で透明部材を撮影した像を示す図である。(b)焦点ずれが発生している状態で透明部材を撮影した像を示す図である。
【図8】本発明の一実施形態に係る、レーザ照射装置の概略図である。
【図9】発光位置と界面位置の関係を示す模式図である。
【図10】発光強度の分布を示す図である。
【図11】本発明の一実施形態に係る、レンズを移動させる移動部を制御するためのブロック図である。
【図12】接合動作の各ステップにおけるレーザ光照射位置を示す図である。
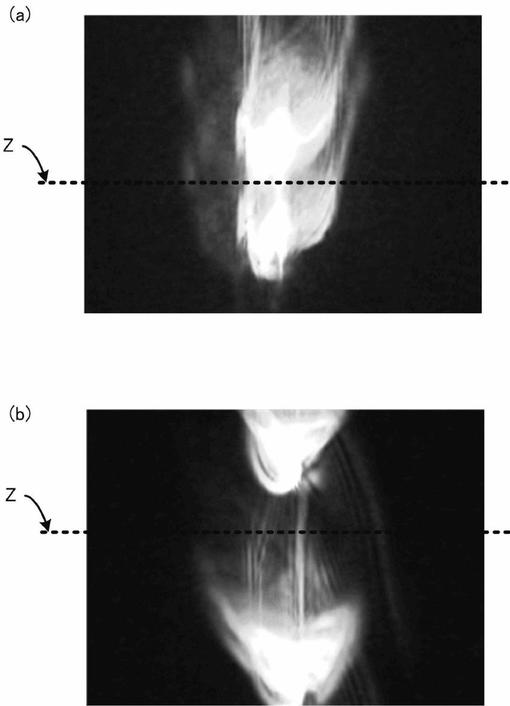
【図13】(a)焦点ずれが発生していない状態で透明部材を撮影した像を示す図である。(b)焦点ずれが発生している状態で透明部材を撮影した像を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して、本発明の実施の形態を説明するが、本発明は本実施形態に限定されるものではない。なお、以下で説明する図面で、同機能を有するものは同一符号を付け、その繰り返しの説明は省略することもある。
【0016】
(第1の実施形態)
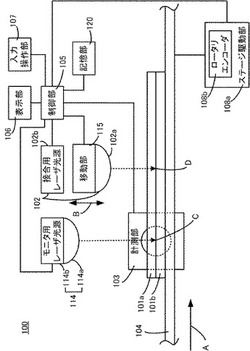
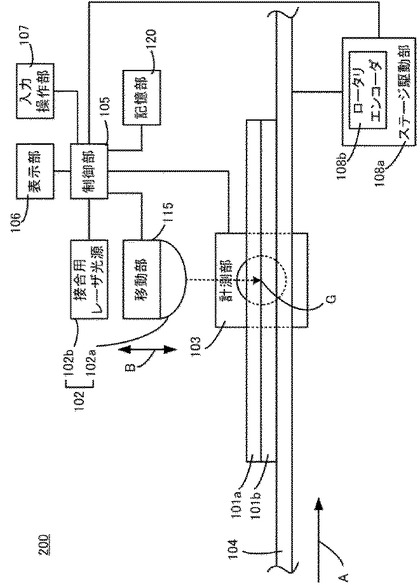
図1は、本実施形態に係るレーザ照射装置100の概略構成図である。レーザ照射装置100は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、該接合用レーザ102から出射されるレーザ光の光軸方向と平行にレーザ光を出射するモニタ用レーザ114と、透明部材101a、101bを端面側から撮影するための計測部103と、透明部材101a、101bを載置するための可動ステージ104と、可動ステージ104を矢印A(透明部材101a、101bの搬送方向)に沿って移動させるためのモータ及び該モータに設けられたロータリエンコーダ108bを有するステージ駆動部108aと、接合用レーザ102のレンズ102aを矢印B(接合用レーザ102から出射されるレーザ光の光軸方向)に沿って移動させるための移動部115と、を備える。接合用レーザ102、モニタ用レーザ114、移動部115、計測部103、及びステージ駆動部108aは、各部位を協調的に制御するための制御部105に接続される。制御部105には、ユーザに情報を出力するための表示部106及びユーザからの入力を受けるための入力操作部107が設けられる。
【0017】
本発明において、透明部材101a、101bには、可視光の少なくとも一部に対して透明であり、かつ用いるレーザ光を透過可能なものを用いる。また、本発明の基となる現象は異素材間の接合でも同様に発生するため、透明部材101a、101bは、同一の素材でなくてもよい。透明部材101a、101bには、例えば、ソーダガラス(青板ガラス又は白板ガラス)、ホウケイ酸ガラスが利用できる。
【0018】
透明部材101a、101bは各部位において多少なりとも厚さや表面形状に差があるため、レーザ光を照射する位置によって、レーザ光の光軸方向に対する界面の位置が相対的に変わることがある。例えば、レーザ光を照射する位置において、下側の透明部材101bが厚くなれば、界面は図中の上方向、つまり接合用レーザ102に近付く方向にシフトし、下側の透明部材101bが薄くなれば、界面は図中の下方向、つまり接合用レーザ102から遠ざかる方向にシフトする。そのため、透明部材101a、101bを移動させながらレーザ接合を行っていると、レーザ光の焦点が、界面に合わないことがある。その結果、部分的に接合が行われなかったり、接合強度が低下したりして、接合品質の低下が起こる。本発明によれば、レーザ光の光軸方向に沿って透明部材同士の界面の位置が一定ではない場合にも、該界面に該レーザ光の焦点を合わせるように補正しながら接合を行うことができるため、接合品質を改善することができる。
【0019】
接合用レーザ102は、接合用レーザ光源102bとレンズ102aとを備える。透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a、101bの界面に焦点が合うように集光され、それによって透明部材101a、101bの界面を接合させる。接合用レーザ102からのレーザ光は、透明部材101a、101bを融解して接合できる出力になるよう構成されている。その際に、レーザ光の焦点の近傍には、プラズマが発生する。なお、図1では接合用レーザ光源102bとレンズ102aとが離れて構成されているが、接合用レーザ光源102bとレンズ102aとが一体で設けられていてもよい。
【0020】
モニタ用レーザ114は、モニタ用レーザ光源114bとレンズ114aとを備える。透明部材101a、101bの界面の法線方向からモニタ用レーザ光源114bにより出射されるレーザ光は、レンズ114aによって、透明部材101a及び101bのいずれか一方の内部であって、透明部材101a、101bの界面から所定の距離離れた地点に焦点が合うように集光され、それによって透明部材101a又は101bの内部にプラズマを発生させる。モニタ用レーザ114からのレーザ光は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力であることが好ましい。そうすることで、接合したい界面以外の場所の融解又は劣化を低減させることができる。なお、図1ではモニタ用レーザ光源114bとレンズ114aとが一体的に構成されているが、モニタ用光源レーザ114bとレンズ114aとが離れて設けられていてもよい。
【0021】
モニタ用レーザ114のレンズ114aは、可動ステージ104に対して、レンズ114aから出射されるレーザ光の光軸方向において相対的に固定されている。例えば、図1において可動ステージ104が載置面の法線方向(z軸方向とする)、すなわちモニタ用レーザ114の光軸方向に移動可能ならば、レンズ114aもz軸方向に追随するように移動するように構成される必要がある。なぜなら、ある基準状態でのモニタ用レーザ114の焦点の位置を基準として、透明部材の厚さ変動等によりz軸方向の界面位置のずれが生じた場合の、モニタ用レーザ114の焦点のずれ量をモニタリングし、該ずれ量を用いて結合用レーザ102の焦点の位置を補正するため、可動ステージ104の載置面をz軸方向の原点とした場合の、レンズ114aの座標は一定である必要があるのである。
【0022】
移動部115は、例えばピアゾアクチュエータ等であり、制御部105によって制御される。そして、移動部115は、レンズ102aを、矢印Bに沿って、接合用レーザ102から出射されるレーザ光の光軸方向に移動させることができる。その結果、移動部115は、レンズ102aを所望の位置に移動することができる。
【0023】
ステージ駆動部108aは、計測及び接合と並行して透明部材101a、101bを矢印Aの方向に移動させる。この際に、ステージ駆動部108aの有するモータの回転数をロータリエンコーダ108bにより取得することで、計測及び接合を行っている位置を正確に計測することができる。別の方法としては、接合用レーザ102、移動部115、モニタ用レーザ114、及び計測部103を、矢印Aの逆方向に動かしても同様の作用が得られる。
【0024】
計測部103は、少なくともモニタ用レーザ114からのレーザ光が透明部材101a、101bに照射されている間に、透明部材101a、101bの端面側から像を撮影する。計測部103は、少なくともモニタ用レーザ114からのレーザ光の焦点の周辺を含む領域を撮影できるように構成される。レーザ光により透明部材101a、101bの内部で発生されたプラズマからの発光が、透明部材101a、101bの内部を通過し、計測部103により像として記録される。計測部103には、例えばCCDカメラ、一次元イメージセンサなど、一次元又は二次元で発光の分布を取得できるものであればいずれも利用することができる。
【0025】
図1に示すように、透明部材101a、101bは、計測位置Cを経て接合位置Dへと矢印Aで示す方向に、接合予定線に沿って搬送される。そして、計測部103は、接合用レーザ102に対して透明部材101a、101bの搬送方向上流で、少なくともモニタ用レーザ114からのレーザ光の焦点の周辺を含む領域を、透明部材101a、101bの端面側から撮影できるように配置されている。
【0026】
制御部105は、所望のタイミングでレーザ光を出射させるように接合用レーザ102及びモニタ用レーザ114を制御することができる。また、制御部105は、透明部材101a、101の端面側からの像を撮影するように計測部103を制御し、該像から所望の情報を取得することができる。さらに、制御部105は、移動部115の動作を制御して接合用レーザ102のレンズ102aを所望の位置に移動させることができる。さらに、制御部105は、ステージ駆動部108aの動作を制御することができ、ロータリエンコーダ108bから、駆動部108aが有するモータの回転情報を受信するように構成されている。
【0027】
制御部105は、記憶部120やCPU(不図示)等を有している。該CPUは、記憶部120に記憶されたプログラム等に基づいて、レーザ照射装置100を統括的に制御する。記憶部120は、CPUが動作するためのシステムワークメモリであるRAM、及び上記プログラムやシステムソフトウェア等を格納するROM、ハードディスクドライブ等を有する。本実施形態では、CPUが、ROMやハードディスクドライブに記憶された本実施形態に係る処理などの制御プログラムに従って、種々の演算、制御、判別などの処理動作を実行することができる。
【0028】
表示部106は、計測部103により撮影される像や、該像から取得される情報を表示するためのディスプレイを含む。さらに、表示部106は、ずれの発生をユーザに音や光を用いて通知するための音声スピーカーや、インジケータランプ等の通知機能を備えてもよい。入力操作部107は、ユーザが制御部に指示を行うためのキーボードやスイッチ等のインターフェースを含む。
【0029】
本実施形態では、レーザ接合される前段階において、接合予定領域に対して計測位置Cにおいてモニタ用レーザ114の焦点のずれが計測され、該ずれの変位が算出される。その後、接合位置Dにおいて接合用レーザ102がずれ計測箇所を接合するときに、該変位を相殺するように移動部115を制御してレンズ102aを移動させておく。この状態で接合用レーザ102からレーザ光を照射することによって、該レーザ光の焦点を界面に正確に合わせることができる。
【0030】
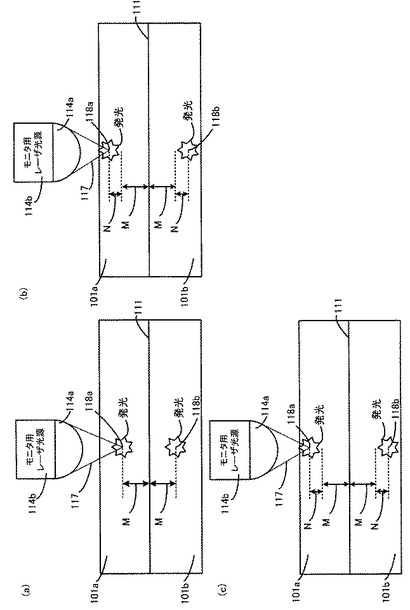
図2(a)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、ずれの基準とする状態(基準状態と呼ぶ)において、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。基準状態においては、接合用レーザ102の焦点が透明部材101a、101bの界面に合うように調整されている。図2(b)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、モニタ用レーザ114の焦点118aが基準状態に比べて図中の上方向、つまりモニタ用レーザ114に近付く方向にずれている場合に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。図2(c)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、モニタ用レーザ114の焦点118aが基準状態に比べて図中の下方向、つまりモニタ用レーザ114から遠ざかる方向にずれている場合に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。
【0031】
図2(a)に示す基準状態においては、モニタ用レーザ114の焦点118aにおいて発生されるプラズマによる発光に加えて、焦点118aから界面111をはさんで反対側の地点118b(反対点118bと呼ぶ)においても発光が観測される。焦点118aと反対点118bとは、界面111に対して等しい距離Mに位置している。このとき、焦点118aと反対点118bとの間の距離は2Mである。
【0032】
図2(b)に示すように、モニタ用レーザ114の焦点118aが基準状態に比べて図中の上方向に距離Nの分ずれる、すなわち界面111が焦点118aに対して相対的に下方向に距離Nの分ずれると、反対点118bは基準状態に比べて図中の下方向に距離Nの分ずれる。このとき、焦点118aと反対点118bとの間の距離は2M+2Nに変化する。
【0033】
図2(c)に示すように、モニタ用レーザ114の焦点118aが基準状態に比べて図中の下方向に距離Nの分ずれる、すなわち界面111が焦点118aに対して相対的に上方向に距離Nの分ずれると、反対点118bは基準状態に比べて図中の上方向に距離Nの分ずれる。このとき、焦点118aと反対点118bとの間の距離は2M−2Nに変化する。
【0034】
したがって、焦点118aと反対点118bとの間の距離を測定することによって、モニタ用レーザ114の焦点118aの、基準状態に対するずれの大きさと向き(図中の上方向又は下方向)を検知することができる。基準状態での焦点118aと反対点118bとの間の距離をX0とし、測定時の該距離をXとすると、変位ΔXは次の式(1)で求められる。
【0035】
ΔX=(X−X0)/2 (1)
【0036】
変位ΔXが0のとき、モニタ用レーザ114の焦点118aに基準状態からのずれは発生していないため、接合用レーザ102の焦点は界面からずれていないと判定できる。変位ΔXが0より大きいとき、焦点118aは基準状態から図中の上方向に変位ΔXの絶対値の分だけずれが発生しているため、その領域における界面は下方向にΔXの絶対値の分だけずれていると判定できる。変位ΔXが0より小さいとき、焦点118aは基準状態から図中の下方向に変位ΔXの絶対値の分だけずれが発生しているため、その領域における界面は上方向にΔXの絶対値の分だけずれていると判定できる。
【0037】
このように算出した基準状態からの変位ΔXを相殺するように、移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を界面に合わせることができる。
【0038】
焦点118a及び反対点118bにおいて観察される発光はそれぞれある程度の面積を持つように観察される。そのため、焦点118a及び反対点118bの間の距離を求めるためには、何らかの手法を用いて焦点118a及び反対点118bにおける発光の像から焦点118a及び反対点118bを定める必要がある。この判定を行うためには、必要とする精度に応じていかなる手法を用いてもよい。
【0039】
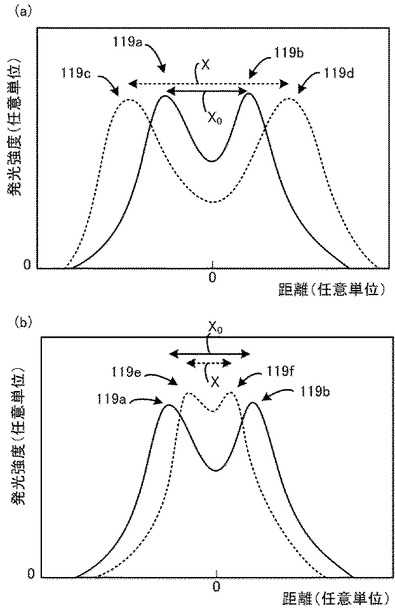
例えば、計測部103により撮影される像から焦点118a及び反対点118bを含む領域の発光強度分布を取得し、その形状を利用して焦点118a及び反対点118bの位置を定めてもよい。図3(a)及び図3(b)は、計測部103により撮影される像から取得できる焦点118a及び反対点118bを含む領域の発光強度分布を模式的に表すグラフである。図3(a)及び図3(b)の実線は、図2(a)の状態(基準状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(a)の破線は、図2(b)の状態(基準状態より焦点が上方向にずれている状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(b)の破線は、図2(c)の状態(基準状態より焦点が下方向にずれている状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(a)及び図3(b)の横軸は透明部材101a、101bの界面からの、透明部材101a、101bの厚さ方向における距離を表し、縦軸は発光強度を表す。
【0040】
このような発光強度分布においては、焦点118a及び反対点118bにおいて発光強度はピークとなるものとみなせる。したがって、図3(a)の実線のピーク119a、119bの位置を、それぞれ基準状態の焦点118a及び反対点118bの位置とし、図3(a)の破線のピーク119c、119dの位置を、それぞれモニタ用レーザ114の焦点118aが基準状態より上方向にずれている状態の焦点118a及び反対点118bの位置とすることができる。よって、ピーク119a、119b間の距離が式(1)におけるX0となり、ピーク119c、119d間の距離が式(1)におけるXとなるため、変位ΔXが計算できる。同様に、図3(b)の実線のピーク119a、119bの位置を、基準状態の焦点118a及び反対点118bの位置とみなし、図3(b)の破線のピーク119e、119fの位置を、モニタ用レーザ114の焦点118aが基準状態より下方向にずれている状態の焦点118a及び反対点118bの位置とみなすことができる。よって、ピーク119a、119b間の距離が式(1)におけるX0となり、ピーク119e、119f間の距離が式(1)におけるXとなるため、変位ΔXが計算できる。
【0041】
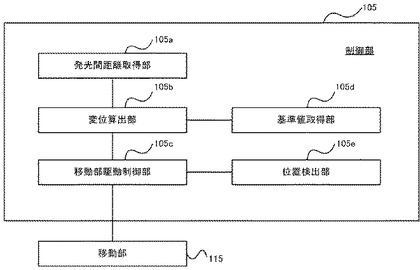
図4は、本実施形態に係る移動部115の移動を制御するための構成を示すブロック図である。
発光間距離取得部105aは、透明部材101a、101bを端面側から撮影するように計測部103を制御し、該計測部103から受信した像から、モニタ用レーザ114の焦点118aにおける発光と、反対点118bにおける発光との間の距離(式(1)におけるX)を算出する。距離Xを算出するためには、上述の発光強度分布を用いることができる。取得された距離Xは、記憶部120に格納される。発光間距離取得部105aからの計測指令により計測部103は、計測位置Cにおいて、距離Xを取得するための計測を行うが、該計測時において計測位置Cに位置する透明部材101a、101bの領域を、「計測点」と呼ぶことにする。すなわち、該計測点における距離Xが計測されることになる。なお、本実施形態では、発光間距離取得部105aは、接合予定線に沿って所定の間隔d毎に距離Xを取得するように構成されている。よって、計測開始時に計測位置Cに位置する透明部材101a、101bの領域が1番目の計測点となり、該計測開始時に計測位置Cに位置する領域から、接合予定線と一致する搬送方向(矢印方向A)に沿って所定の間隔dだけずれた位置が2番目の計測点となる。よって、k番目(kは2以上の整数)の計測点は、k−1番目の計測点から上記所定の間隔dだけ離間している。発光間距離取得部105aは、計測点の順序に関連付けて距離Xを記憶部120に格納する。よって、記憶部120には、1番目〜k番目の計測点の各々について、対応する距離Xが関連付けて格納されている。
【0042】
基準値取得部105dは、焦点ずれの基準とする基準値を取得する。本実施形態においては、1つ前の計測時(k−1番目の計測点、kは2以上の整数)を基準状態とする。したがって、基準値取得部105dは、2番目〜k番目の計測点の各々について、1つ前の計測時の距離Xを記憶部120から抽出して基準距離(式(1)におけるX0)として利用する。1番目の計測点においては、焦点が界面に合うように予め調整を行い、それ自身の距離を基準状態として利用する。
別の方法としては、1番目の計測点を基準状態として、1番目の計測点における距離Xを基準距離X0としてもよい。
【0043】
変位算出部105bは、発光間距離取得部105aにて取得された距離Xと基準値取得部105dにて取得された基準距離X0とにより、式(1)を用いて変位ΔXを算出する。変位算出部105bは、1番目〜k番目の計測点の各々について、対応する変位ΔXを関連付けて記憶部120に格納する。
【0044】
位置検出部105eは、透明部材101a、101bの計測点が接合位置Dに位置することを検出し、計測点が接合位置Dに位置することを移動部駆動制御部105cに通知する。具体的には、位置検出部105eは、ロータリエンコーダ108bから受信したステージ駆動部108aが有するモータの回転情報に基づいて、各計測点が接合位置Dに位置することを検知する。本実施形態では、接合用レーザ102とモニタ用レーザ114との位置関係は、透明部材101a、101bの搬送方向(矢印A)については不変であるので、計測位置Cと接合位置Dとの間の距離は一定である。よって、ステージ駆動部108aが有するモータの回転により透明部材101a、101bが搬送される場合において、計測位置Cを通過したある領域が接合位置Dに位置することを上記回転情報から検知することができるのである。本実施形態では、位置検出部105eは、1番目の計測点が接合位置Dに位置することを上記回転情報に基づいて検出し、該検出結果を移動部駆動制御部105cに通知する。2番目の計測点については、位置検出部105eは、上記回転情報に基づいて、1番目の計測点の検出(計測点が接合位置Dに位置することの検出)から上記所定の間隔dだけ透明部材101a、101bが移動した後に、移動部駆動制御部105cに2番目の計測点の検出を通知する。すなわち、位置検出部105eは、移動部駆動制御部105cへの、k番目の計測点の検出通知(計測点が接合位置Dに位置することを検出したことの通知)については、上記回転情報に基づいて、k−1番目の検出から所定の間隔dだけ透明部材101a、101bが移動する毎に行うように構成されている。従って、移動部駆動制御部105cは、各計測点が接合位置Dに位置することを知ることができる。
【0045】
移動部駆動制御部105cは、透明部材101a、101bの、計測部103にて距離Xを計測した領域(計測点)について、接合用レーザ102の光軸方向に沿って接合用レーザ102のレンズ102aを移動させることによって、変位算出部105bにて算出された変位ΔXを相殺するように、移動部115を作動させる。具体的には、移動部駆動制御部105cは、上記回転情報に基づいて1番目の計測点が接合位置Dに位置する前に、該1番目の計測点に対応する変位ΔXを記憶部120から読み出す。変位ΔXが0より大きい場合には、接合用レーザ102の焦点の位置が界面より上方向に変位ΔXの絶対値分ずれているため、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを下方向に変位ΔXの絶対値分移動させることによって、変位ΔXを相殺する。変位ΔXが0より小さい場合には、接合用レーザ102の焦点の位置が界面より下方向に変位ΔXの絶対値分ずれているため、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを上方向に変位ΔXの絶対値分移動させることによって、変位ΔXを相殺する。変位ΔXが0に等しい場合には、接合用レーザ102の焦点の位置が界面に合っているため、何もしない。また、移動部駆動制御部105cには、位置検出部105eから計測点の序数通り(計測部103による計測の順番通り)に上記検出通知が送信されるので、移動部駆動制御部105cは、k−1(kは2以上の整数)番目の検出通知を受信してからk番目の計測点に対応する変位ΔXを記憶部120から読み出し、k番目の検出通知を受信する前に、レンズ102aを光軸方向に沿って移動させることによって、変位算出部105bにて算出された変位ΔXを相殺するように、移動部115を作動させる。例えば、位置検出部105eより1番目の検出通知を受信すると、移動部駆動制御部105cは2番目の計測点に対応する変位ΔXを記憶部120から読み出し、2番目の検出通知を受信する前に、該読み出された変位ΔXを相殺する。また、2番目の検出通知を受信すると、3番目の計測点に対応する変位ΔXを記憶部120から読み出し、3番目の検出通知を受信する前に、該読み出された変位ΔXを相殺する。このように制御することにより、ある計測点にとっては、該計測点が接合位置Dに位置する時には、上記ある計測点に応じた変位ΔXを相殺しておく、つまり接合用レーザ102の焦点の位置を界面に合わせておくことができる。
【0046】
なお、図2(a)、図2(b)及び図2(c)においては、上側の透明部材101aの内部に焦点118aを合わせているが、下側の透明部材101bの内部に焦点118aを合わせてもよい。その場合には、反対点118bが上側の透明部材101aの内部に形成される点が異なるのみであり、式(1)の符号を逆にすれば、上述の界面に焦点を合わせる方法は同様に適用できることは理解されたい。
【0047】
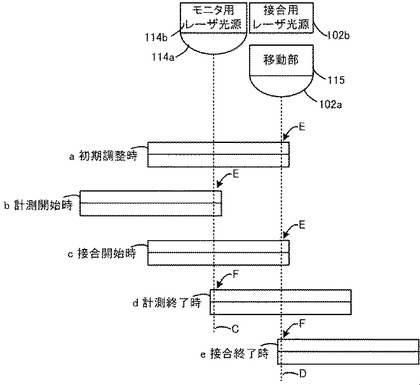
以下に本実施形態に係る接合動作の一例を説明する。
図5は、本実施形態に係る接合動作の各ステップにおけるレーザ光の照射位置を模式的に示す図である。最初に、ユーザは、透明部材101a、101bを重ね合わせて可動ステージ104上に載置する。このとき、接合の開始地点Eが接合用レーザ102の光軸方向にある接合位置Dに位置するようにする(図5のa)。この状態で、接合用レーザ102の焦点が界面に合うように開始地点Eにおける焦点合わせ(初期調整と呼ぶ)を行う。
【0048】
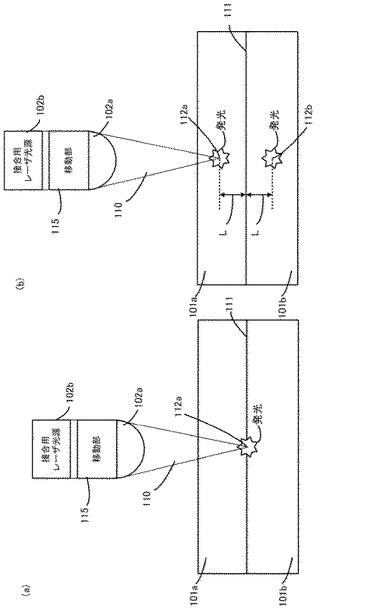
例えば、初期調整を、接合用レーザ102の焦点及び反対点を観察することにより行うことができる。その場合には、計測部103は、モニタ用レーザ114の焦点の周辺を含む領域に加えて、接合用レーザ102の焦点の周辺を含む領域を撮影できるように構成される。ユーザが初期調整の指示を入力操作部107から行うと、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を表示部106に表示させる。その際に、計測部103により撮影される像の中で観測される発光の位置の模式図を、図6(a)及び図6(b)に示す。図6(a)に示すように、接合用レーザ102の焦点112aが界面111に合っている場合には、焦点112aにおいて発生されるプラズマによってのみ発光が観測される。それに対して、図6(b)に示すように、接合用レーザ102の焦点112aが、界面111から接合用レーザ102の光軸方向にずれている場合には、焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。なお、焦点112aと反対点112bとは、界面に対して等しい距離Lに位置している。
【0049】
したがって、ユーザは表示部106を見て、焦点112a及び反対点112bに係る2つの発光が観測される場合には、発光が1つになるように(つまり、図6(b)の状態から図6(a)の状態になるように)、接合用レーザ102のレンズ102aの位置を光軸方向に沿って調整することによって、接合用レーザ102の焦点が界面に合うようにする。具体的には、ユーザが入力操作部107から、レンズ102aを上方向又は下方向へ所望の距離移動させる指示を出し、該指示に従って制御部105が移動部115を作動させてレンズ102aを光軸方向に沿って移動させる。ユーザが直接、レンズ102aの位置を調整しても構わない。本実施形態ではレンズ102aのみが移動されているが、接合用レーザ光源102bとレンズ102aとが一体化されて移動されるように構成されてもよい。
【0050】
なお、初期位置における焦点合わせの具体的な手法は、上述の手法に限らず、当技術分野で周知の手段を利用して焦点合わせを行ってもよい。
【0051】
その後、初期位置においてモニタ用レーザ114の焦点118aが、上側の透明部材101aの内部であって、界面111から離間した位置に焦点が合うように調整する。初期位置において、制御部105は、計測部103を制御して透明部材101a、101bの像を撮影させ、該像を表示部106に表示させる。ユーザは表示部106を見て、焦点118aにおける発光及び反対点118bにおける発光の両方が計測部103によって撮影可能な範囲に入るように、モニタ用レーザ114の位置を調整する。そのために、モニタ用レーザ114の取り付け位置を手動で変更してもよいし、モニタ用レーザ114を光軸方向に移動するための移動部をさらに設けてもよい。モニタ用レーザ114のレンズ114aのみの位置を調整してもよい。モニタ用レーザ114の位置は、焦点118aにおける発光と反対点118bにおける発光とが十分に分離されるように調整することが望ましい。
【0052】
初期位置での調整を行った後、ユーザは入力操作部107から制御部105に対して接合処理の開始指示を行う。開始指示を受けると、制御部105は、ステージ駆動部108aを制御して、初期調整が行われた開始地点Eが、モニタ用レーザ114の光軸方向にある計測位置Cに位置するように透明部材101a、101bを移動させる(図5のb)。次いで、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、モニタ用レーザ114を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。同時に、制御部105は、計測部103を制御して透明部材101a、101bのモニタ用レーザ114の焦点の周辺を含む領域を撮影させ、撮影された像を取得し、該像から発光間の距離Xを算出する。すなわち、搬送開始時において計測位置Cに位置する透明部材101a、101bの領域(開始地点E)が、1番目の計測点となり、該1番目の計測点における距離Xを算出する。制御部105は、1番目の計測点が接合位置Dに到着する前に、接合用レーザ102を駆動してレーザ光の照射を開始し、接合時にはレーザ光を連続照射させる。接合用レーザ102からのレーザ光の照射開始は、ロータリエンコーダ108bからの回転情報に基づいて行えばよい。
【0053】
1番目の計測点(開始地点E)が接合位置Dに到達すると接合が開始され(図5のc)、それ以降は計測位置Cにおいて計測された距離X及び基準距離X0(1つ前の計測点における距離Xを用いる)から式(1)によって算出される変位ΔXを基づいて、接合用レーザ102の焦点位置の調整が行われる。2番目の計測点は、透明部材101a、101bにおいて、1番目の計測点から所定の間隔dだけ離間した位置であり、該2番目の計測点が計測位置Cに到達すると、計測部103は2番目の計測点における距離Xを取得する。制御部105の変位算出部105bは、2番目の計測点における距離X及び記憶部120に記憶されている基準距離X0(1番目の計測点における距離Xを用いる)に基づいて、該2番目の計測点における変位ΔXを算出する。制御部105の移動部駆動制御部105cは、位置検出部105eから1番目の検出通知を受けると、2番目の検出通知を受信する前に、上記算出された変位ΔXを相殺するように、移動部115を制御して接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われる。
【0054】
モニタ用レーザ114からのレーザ光の照射は、少なくとも接合の終了地点Fが計測位置Cに到達する(図5のd)まで行われる。その後、終了地点Fが接合位置Dに到達し(図5のe)、終了地点Fの接合がされた時点で、1つの接合予定線に沿った接合処理は終了となり、制御部105は、接合用レーザ102、移動部115、モニタ用レーザ114及びステージ駆動部108aの動作を停止させる。
【0055】
なお、本実施形態では、上記1番目の計測点における、上記距離Xの取得から、変位ΔXを相殺する移動部115の移動までの間にも、2番目〜k番目〜N(Nはk以上の整数)番目の計測点の各々について距離Xを取得している。従って、各計測点に対する距離Xの取得から算出された変位ΔXを相殺するための移動部115の移動までの動作については、他の計測点に対する諸動作と同時に行ってもよい。従って、この場合は、算出された変位ΔXの相殺を逐次行いながら連続照射されたレーザによる接合を行い、それと同時にレーザ照射される前の接合予定部の距離Xを逐次計測し、該接合予定部の変位ΔXの算出を逐次行う。
【0056】
本実施形態によれば、透明部材101a、101bの端面から観測される2つの発光の間の距離の変位を算出し、当該算出した変位に基づいて焦点の位置の補正が行われる。これにより、透明部材101a、101bの界面位置のばらつきを反映して、界面に焦点をより正確に形成することができる。すなわち、本実施形態では、透明部材101a、101bの接合予定線に沿った複数の領域(計測点)の各々において接合用のレーザ照射の前に予め透明部材101a、101bの内部に観測される2つの発光間の距離を求め、該求められた各々の距離から上記複数の領域の各々について界面位置の変位を求める。そして、上記複数の領域の各々がレーザ照射位置である接合位置Dに位置する時には、該変位を相殺するように接合用レーザ102のレンズ102aを移動させる。従って、透明部材101a、101bの界面位置が上記接合予定線に沿って変動していても、その変動に追従して該変動を緩和するようにレンズ102aを移動させることができる。よって、透明部材101a、101bの界面位置の変動があっても、接合予定線に沿って接合用レーザ102の焦点を界面に位置させることができる。そのため、透明部材101a、101bを確実にレーザ接合することができる。
【0057】
本実施形態では、変位ΔXを相殺するようにレンズ102aを移動させているが、ずれが発生した(つまり、変位ΔXが0でなくなった)時に、接合用レーザ102の動作を自動的に停止してもよい。また、ずれが発生した時に、表示部106から音や光を発することによってユーザにずれの発生を通知してもよい。これらの場合には、表示部106に、変位ΔXを表示することが好ましい。ユーザは変位ΔXの値を見て、接合処理を続行するか否かを判断することができる。ユーザは、接合処理を停止することを決断すると、入力操作部107から停止指示を行うことができる。停止指示を受けると、制御部105は、接合用レーザ102、移動部115、モニタ用レーザ114及びステージ駆動部108aの動作を停止させ、接合処理を停止する。
【0058】
(第1の実施例)
本実施形態に係る実施例として、モニタ用レーザ114から透明部材101a、101bの内部に焦点を合わせてレーザ光を照射し、該透明部材の端面から発光の観測を行った。透明部材101a、101bには、それぞれ1mm厚の青板ガラスを用いた。モニタ用レーザ114にはフェムト秒ファイバレーザを用い、パルス幅500fs、繰り返し周波数100kHz、平均強度400mW、波長1.04μmとした。モニタ用レーザのレンズ114aにはNA=0.4のものを用いた。また、雰囲気は大気とした。モニタ用レーザ114の平均強度は、透明部材を融解しない程度の低出力、例えば100mWにするとより望ましい。
【0059】
この条件でレーザ光の照射を行った際に、計測部103により撮影された像を図7(a)及び図7(b)に示す。各図中の線Zは透明部材101a、101bの界面の位置(不可視)を表すために引いた線である。図7(a)は、基準状態の像である。この像から、線Zより上にモニタ用レーザ114の焦点118aにおける発光が観察され、線Zより下にモニタ用レーザ114の反対点118bにおける発光が観察されていることがわかる。なお、この状態では、モニタ用レーザ114の焦点118aは、モニタ用レーザ114の光軸方向に沿って界面より上側の50μmの地点に合わせられている。図7(b)は、モニタ用レーザ114の焦点118aの位置が、基準状態よりモニタ用レーザ114の光軸方向に沿って上側に50μmずれている状態(つまり、焦点118aは界面より100μm上側にある状態)の像である。これらの像から、例えば上述の発光強度分布を取得して、焦点118aにおける光と、反対点118bにおける発光との間の距離を計算することによって、特定の計測点においてモニタ用レーザ114の焦点118aが基準状態からずれていると判定でき、さらにずれの方向及び大きさを求めることができる。その後、該計測点が接合される時に、該ずれを相殺するように接合用レーザ102のレンズ102aの位置を調整することができる。
【0060】
なお、本実施例においては、意図的にレーザ光焦点の基準状態からのずれを生じさせるために、モニタ用レーザ114のレンズ114aの位置を、図中の上方向、つまりモニタ用レーザ114の光軸方向に沿って透明部材101a、101bから遠ざかる方向に50μm移動させた。これにより、モニタ用レーザ114の焦点118aの位置に、モニタ用レーザ114の光軸方向に沿って基準状態より図中の上方向に50μmのずれが生じた。
なお、本実施例と異なり、焦点位置のずれが透明部材101a、101bの厚さが変わることにより生じたとしても、撮影される像は本実施例の場合と本質的に変わらないことを理解されたい。
【0061】
(第2の実施形態)
第1の実施形態では、接合用レーザとモニタ用レーザとを設け、モニタ用レーザによって計測したずれを、逐次接合用レーザの位置に反映させている。本実施形態では、前もって各地点の界面位置を測定して記憶しておき、接合時に記憶されている該界面位置を読み出して、レーザ光の焦点が界面に合うように接合用レーザの位置を制御する。本実施形態では接合用レーザが、モニタ用レーザの機能を兼ねて、界面位置の測定と接合との両方を行っている。
【0062】
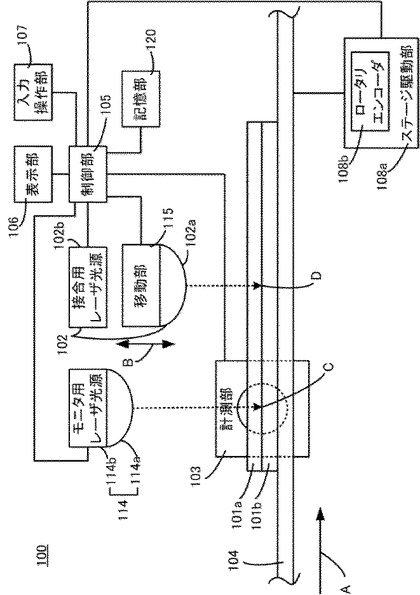
図8は、本実施形態に係るレーザ照射装置200の概略構成図である。第1の実施形態との違いは、モニタ用レーザ114を備えない点である。
【0063】
レーザ照射装置200は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、透明部材101a、101bを端面側から撮影するための計測部103と、透明部材101a、101bを載置するための可動ステージ104と、可動ステージ104を矢印A(透明部材101a、101bの搬送方向)に沿って移動させるためのモータ及び該モータに設けられたロータリエンコーダ108bを有するステージ駆動部108aと、接合用レーザ102のレンズ102aを矢印B(接合用レーザ102から出射されるレーザ光の光軸方向)に沿って移動させるための移動部115と、を備える。接合用レーザ102、移動部115、計測部103、及びステージ駆動部108aは、各部位を協調的に制御するための制御部105に接続される。制御部105には、ユーザに情報を出力するための表示部106及びユーザからの入力を受けるための入力操作部107が設けられる。
【0064】
接合用レーザ102は、透明部材101a、101bの界面位置を測定する時及び接合を行う時の両方に用いられる。界面位置を測定する時には、透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a及び101bのいずれか一方の内部であって、透明部材101a、101bの界面から所定の距離離れた地点に焦点が合うように集光され、それによって透明部材101a又は101bの内部にプラズマを発生させる。界面位置を測定する時には、接合用レーザ102からのレーザ光は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力になるように調節される。そうすることで、接合したい界面以外の場所での融解又は劣化を低減させることができる。
接合を行う時には、透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a、101bの界面に焦点が合うように集光され、それによって透明部材101a、101bの界面を接合させる。接合を行う時には、接合用レーザ102からのレーザ光は、透明部材101a、101bを融解して接合できる出力になるよう調節される。その際に、レーザ光の焦点の近傍には、プラズマが発生する。なお、図8では接合用レーザ光源102bとレンズ102aとが離れて設けられているが、接合用レーザ光源102bとレンズ102aとが一体的に構成されていてもよい。
【0065】
計測部103は、第1の実施形態と異なり、接合用レーザ102からのレーザ光の照射位置Gの周辺を含む領域を撮影できるように構成される。
【0066】
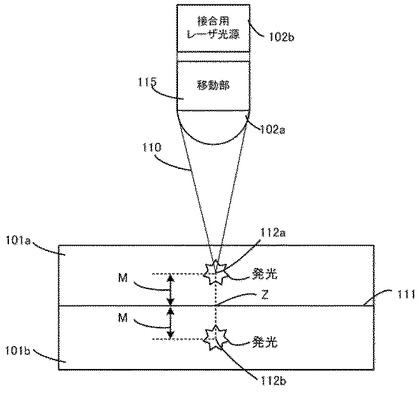
図9は、界面位置を測定するために接合用レーザ102からのレーザ光110を透明部材101aの内部に照射する際に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。接合用レーザ102の焦点112aは、界面111より図中の上方向、つまり接合用レーザ102に近付く方向に所定の距離(図ではM)移動されている。この時、接合用レーザ102の焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。焦点112aと反対点112bとは、界面111に対して等しい距離Mに位置している。すなわち、接合用レーザ102の光軸方向に沿った界面位置Zは、焦点112aの位置と反対点112bの位置との中点である。
【0067】
したがって、焦点112a及び反対点112bの位置を測定することによって、接合用レーザ102の光軸方向に沿った界面位置を測定することができる。焦点112aの位置をZ1とし、反対点112bの位置をZ2とすると、界面位置Zは次の式(2)で求められる。なお、Z、Z1、及びZ2の位置は、測定及び接合で共通に用いられる任意の基準により定義する。例えば、計測部103が撮影する像の下端を0とし、接合用レーザ102からのレーザ光110の光軸に沿った上方向を正方向と定義することができる。
【0068】
Z=(Z1+Z2)/2 (2)
【0069】
本実施形態では、接合予定線に含まれる各地点の界面位置Zを前もって測定して、該界面位置Zを各地点に紐付けて記憶しておき、接合を行う際に各地点において移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を該界面位置Zに合わせることができる。
【0070】
焦点112a及び反対点112bにおいて観察される発光はそれぞれある程度の面積を持つように観察される。そのため、焦点112a及び反対点112bの位置を求めるためには、何らかの手法を用いて焦点112a及び反対点112bにおける発光の像から焦点112a及び反対点112bを定める必要がある。この判定を行うためには、必要とする精度に応じていかなる手法を用いてもよい。
【0071】
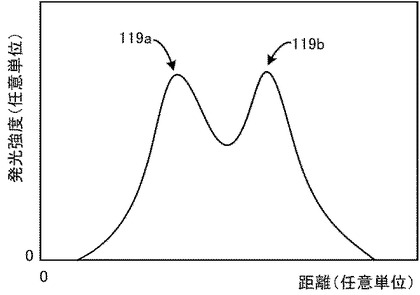
例えば、計測部103により撮影される像から焦点112a及び反対点112bを含む領域の発光強度分布を取得し、その形状を利用して焦点112a及び反対点112bの位置を定めてもよい。図10は、計測部103により撮影される像から取得できる焦点112a及び反対点112bを含む領域の発光強度分布を模式的に表すグラフである。図10の横軸は透明部材101a、101bの厚さ方向における、上述の任意の基準からの距離を表し、縦軸は発光強度を表す。
【0072】
このような発光強度分布においては、焦点112a及び反対点112bにおいて発光強度はピークとなるものとみなせる。したがって、図10のピーク119a、119bの位置を、それぞれ基準状態の焦点112a及び反対点112bの位置とすることができる。よって、ピーク119aの位置が式(2)におけるZ2となり、ピーク119bの位置が式(2)におけるZ1となるため、界面位置Zが計算できる。
【0073】
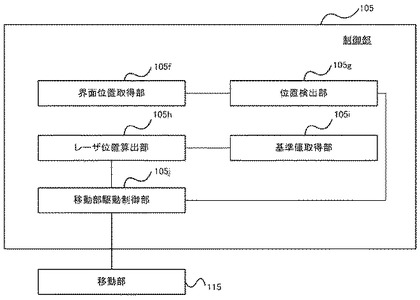
図11は、本実施形態に係る移動部115の移動を制御するための構成を示すブロック図である。以下では接合用レーザ102のレンズ102aの光軸方向に沿った位置をHとし、位置Hは界面位置の測定及び接合で共通に用いられる任意の基準により定義する。例えば、測定開始時のレンズ102aの位置Hを0として光軸に沿って上方向(接合用レーザ102に近付く方向)を正方向としてもよい。又は、同様に可動ステージ104の位置を0として上方向を正方向としてもよい。
まず、接合予定線内の各地点における界面位置の測定を行う。界面位置の測定の開始時には、接合用レーザ102の焦点112aの位置が、界面にあっている状態(このときのレンズ102aの位置Hを基準レーザ位置H0とする)より所定の距離Mの分、接合用レーザ102の光軸に沿った上方向に位置するように調整しておく。このとき、接合用レーザ102の位置はH0+Mである。界面位置取得部105fは、透明部材101a、101bを端面側から撮影するように計測部103を制御し、該計測部103から受信した像から、接合用レーザ102の焦点112a及び反対点112bの位置(式(2)におけるZ1、Z2)を測定し、式(2)の界面位置Zを算出する。界面位置Zを算出するためには、上述の発光強度分布を用いることができる。取得された界面位置Zは、記憶部120に格納される。界面位置取得部105fからの計測指令により計測部103は、照射位置Gにおいて、界面位置Zを取得するための計測を行うが、該計測時において照射位置Gに位置する透明部材101a、101bの領域を、「計測点」と呼ぶことにする。すなわち、該計測点における界面位置Zが計測されることになる。なお、本実施形態では、界面位置取得部105fは、接合予定線に沿って所定の間隔d毎に界面位置Zを取得するように構成されている。よって、計測開始時に照射位置Gに位置する透明部材101a、101bの領域が1番目の計測点となり、該計測開始時に照射位置Gに位置する領域から、接合予定線と一致する搬送方向(矢印方向A)に沿って所定の間隔dだけずれた位置が2番目の計測点となる。よって、k番目(kは2以上の整数)の計測点は、k−1番目の計測点から上記所定の間隔dだけ離間している。発光位置取得部105fは、計測点の順序に関連付けて界面位置Zを記憶部120に格納する。よって、記憶部120には、1番目〜k番目の計測点の各々について、対応する界面位置Zが関連付けて格納されている。
【0074】
界面位置の測定時には、位置検出部105gは、透明部材101a、101bの各計測点が照射位置Gに位置することを検出し、照射位置Gに各計測点が位置するたびに界面位置取得部105fに通知する。具体的には、位置検出部105gは、ロータリエンコーダ108bから受信したステージ駆動部108aが有するモータの回転情報に基づいて、各計測点が照射位置Gに位置することを検知する。本実施形態では、位置検出部105eは、1番目の計測点が照射位置Gに位置することを上記回転情報に基づいて検出し、該検出結果を界面位置取得部105fに通知する。2番目の計測点については、位置検出部105gは、上記回転情報に基づいて、1番目の計測点の検出(計測点が照射位置Gに位置することの検出)から上記所定の間隔dだけ透明部材101a、101bが移動した後に、界面位置取得部105fに2番目の計測点の検出を通知する。すなわち、位置検出部105gは、界面位置取得部105fへの、k番目の計測点の検出通知(計測点が照射位置Gに位置することを検出したことの通知)については、上記回転情報に基づいて、k−1番目の検出から所定の間隔dだけ透明部材101a、101bが移動する毎に行うように構成されている。従って、界面位置取得部105fは、各計測点が照射位置Gに位置することを知ることができる。
【0075】
接合予定線内の各地点における界面位置の測定が終わった後に、接合が開始される。接合の開始時に、1番目の計測点が再度照射位置Gに位置するように透明部材101a、101bがセットされる。このとき、接合用レーザ102の焦点が界面に合うよう、接合用レーザ102のレンズ102aの位置を基準レーザ位置H0に移動しておく。
【0076】
基準値取得部105iは、レーザ位置調整の基準とする基準値を取得する。そのために、計測開始時(1番目の計測点)のレンズ102aの位置を基準レーザ位置H0として、計測開始時(1番目の計測点)の界面位置Zを基準界面位置Z0として、記憶部120に予め格納しておく。
【0077】
レーザ位置算出部105hは、各地点について記憶部120に記憶された界面位置Zを読み出し、該界面位置Zと、基準値取得部105iにて取得された基準レーザ位置H0及び基準界面位置Z0とにより、以下の式(3)を用いて、該界面位置Zに対して適用すべきレーザ位置Hを算出する。
【0078】
H=H0+(Z−Z0) (3)
【0079】
このように算出したレーザ位置Hになるように、移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を界面に合わせることができる。なお、式(3)は式(1)とは形態が異なるが、第1の実施形態では発光間の距離を用いているのに対して、第2の実施形態では界面位置を用いている点が異なるだけであって、基準状態からの変位を相殺するように接合用レーザ102のレンズ102aの位置を移動させ、それによって接合用レーザ102の焦点を界面に合わせる点は同じである。
【0080】
接合時には、位置検出部105gは、透明部材101a、101bの計測点が照射位置Gに位置することを検出し、計測点が照射位置Gに位置することを移動部駆動制御部105jに通知する。具体的には、界面の測定時と同様に行うことができる。
【0081】
移動部駆動制御部105jは、透明部材101a、101bの、計測部103にて界面位置を計測した領域(計測点)について、該界面位置からレーザ位置算出部105hにて算出されたレーザ位置Hになるように、移動部115を作動させて接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。具体的には、移動部駆動制御部105jは、上記回転情報に基づいて2番目の計測点が照射位置Gに位置する前に、該2番目の計測点に対応する界面位置Zを記憶部120から読み出す。該読み出された界面位置Zに基づいてレーザ位置算出部105hによってレーザ位置Hを算出し、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを該レーザ位置Hに移動させる。また、移動部駆動制御部105jには、位置検出部105gから計測点の序数通り(計測部103による計測の順番通り)に上記検出通知が送信されるので、移動部駆動制御部105jは、k−1(kは2以上の整数)番目の検出通知を受信してからk番目の計測点に対応する界面位置Zを記憶部120から読み出し、k番目の検出通知を受信する前に、移動部115を作動させてレンズ102aをレーザ位置算出部105hにて算出されたレーザ位置Hに移動させる。例えば、位置検出部105gより1番目の検出通知を受信すると、移動部駆動制御部105jは2番目の計測点に対応する界面位置Zを記憶部120から読み出し、2番目の検出通知を受信する前に、レーザ位置算出部105hにて該界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させる。また、2番目の検出通知を受信すると、3番目の計測点に対応する界面位置Zを記憶部120から読み出し、3番目の検出通知を受信する前に、レーザ位置算出部105hにて該界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させる。このように制御することにより、ある計測点にとっては、該計測点が照射位置Gに位置する時には、上記ある計測点に応じた界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させておく、つまり接合用レーザ102の焦点を界面に合わせておくことができる。
【0082】
なお、図9においては、上側の透明部材101aの内部に焦点118aを合わせているが、下側の透明部材101bの内部に焦点118aを合わせてもよい。その場合には、反対点118bが上側の透明部材101aの内部に形成される点が異なるのみであり、上述の界面に焦点を合わせる方法は同様に適用できることは理解されたい。
【0083】
以下に本実施形態に係る接合動作の一例を説明する。
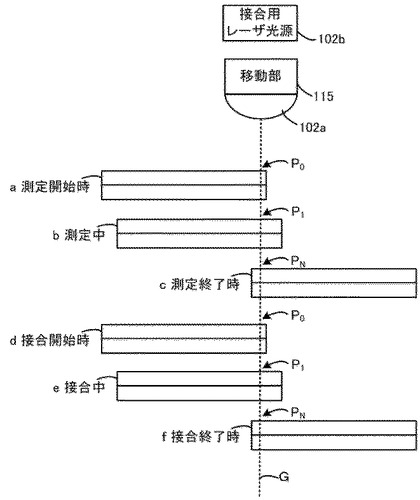
図12は、本実施形態に係る接合動作の各ステップにおけるレーザ光の照射位置を模式的に示す図である。最初に、ユーザは、透明部材101a、101bを重ね合わせて可動ステージ104上に載置する。このとき、開始地点P0が接合用レーザ102の光軸方向にある照射位置Gに位置するようにする(図12のa)。この状態で、接合用レーザ102の焦点が界面に合うように開始地点P0における焦点合わせ(初期調整と呼ぶ)を行う。
【0084】
例えば、初期調整を、接合用レーザ102の焦点及び反対点を観察することにより行うことができる。ユーザが初期調整の指示を入力操作部107から行うと、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を表示部106に表示させる。その際に、計測部103により撮影される像の中で観測される発光の位置の模式図を、図6(a)及び図6(b)に示す。図6(a)に示すように、接合用レーザ102の焦点112aが界面111に合っている場合には、焦点112aにおいて発生されるプラズマによってのみ発光が観測される。それに対して、図6(b)に示すように、接合用レーザ102の焦点112aが、界面111から接合用レーザ102の光軸方向にずれている場合には、焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。なお、焦点112aと反対点112bとは、界面に対して等しい距離Lに位置している。
【0085】
したがって、ユーザは表示部106を見て、焦点112a及び反対点112bに係る2つの発光が観測される場合には、発光が1つになるように(つまり、図6(b)の状態から図6(a)の状態になるように)、接合用レーザ102のレンズ102aの位置を光軸方向に沿って調整することによって、接合用レーザ102の焦点が界面に合うようにする。具体的には、ユーザが入力操作部107から、レンズ102aを上方向又は下方向へ所望の距離移動させる指示を出し、該指示に従って制御部105が移動部115を作動させてレンズ102aを光軸方向に沿って移動させる。ユーザが直接、レンズ102aの位置を調整しても構わない。本実施形態ではレンズ102aのみが移動されているが、接合用レーザ光源102bとレンズ102aとが一体化されて移動されるように構成されてもよい。
【0086】
なお、初期位置における焦点合わせの具体的な手法は、上述の手法に限らず、当技術分野で周知の手段を利用して焦点合わせを行ってもよい。
【0087】
初期位置での調整を行った後、ユーザは入力操作部107から制御部105に対して処理の開始指示を行う。開始指示を受けると、接合処理に先立って、各計測点における界面位置の測定処理が行われる。まず、測定開始時の接合用レーザ102のレンズ102aの位置Hを基準レーザ位置H0として記憶部120に記憶した後、レンズ102aを所定の距離Mの分、接合用レーザ102の光軸に沿った上方向に移動する。所定の距離Mは、透明部材101a、101bの各々の厚さよりも小さく、かつ接合用レーザ102の焦点における発光と反対点における発光とが十分に分離される程度の距離であることが望ましい。また、界面位置の測定時の接合用レーザ102からのレーザ出力は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力であることが望ましい。次いで、制御部105は、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、接合用レーザ102を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。同時に、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を取得し、該像から界面位置Zを算出する。
【0088】
搬送開始時において照射位置Gに位置する透明部材101a、101bの領域(開始地点P0)が、1番目の計測点となり、該1番目の計測点における界面位置Zを算出し、記憶部120に記憶する。また、該1番目の計測点は、上述の初期調整によって接合用レーザ102の焦点が界面に合うように調整された開始地点P0であるから、該界面位置Zを基準界面位置Z0として、記憶部120に記憶する。次いで、制御部105の位置検出部105gが、2番目の計測点(地点P1)が照射位置Gに位置したこと(図12のb)を検出すると、制御部105の界面位置取得部105fは該2番目の計測点における界面位置Zを算出し、記憶部120に記憶する。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われ、各計測点と界面位置Zとが紐付けられて記憶部120に記憶される。その後、終了地点PNが照射位置Gに到達し(図12のc)、該終了地点PNにおける界面位置Zの測定がされた時点で、1つの接合予定線に沿った測定処理は終了となり、制御部105は、接合用レーザ102、移動部115及びステージ駆動部108aの動作を停止させる。
【0089】
界面位置の測定処理が終了すると、次いで接合処理が行われる。まず、制御部105は、ステージ駆動部108aを制御して、透明部材101a、101bの開始地点P0が接合用レーザ102の光軸方向にある照射位置Gに位置するように、透明部材101a、101bを搬送する(図12のd)。また、記憶部120から基準レーザ位置H0を読み出し、制御部105は、移動部115を制御して接合用レーザ102のレンズ102aを光軸に沿って該基準レーザ位置H0に移動させる。その後、制御部105は、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、接合用レーザ102を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。接合時の接合用レーザ102からのレーザ出力は、透明部材101a、101bを融解して接合させることが可能な出力にする。
【0090】
接合用レーザ102からのレーザ光の連続照射により行われる接合と並行して、接合予定線に含まれる各地点に関して、記憶部120から読み出される界面位置Z、基準界面位置Z0、及び基準レーザ位置H0から式(3)によって算出されるレーザ位置Hに基づいて、接合用レーザ102の焦点位置の調整が行われる。2番目の計測点(地点P1)は、透明部材101a、101bにおいて、1番目の計測点から所定の間隔dだけ離間した位置である。制御部105は、該2番目の計測点が照射位置Gに到達する前に、記憶部120から2番目の計測点における界面位置Zを取得する。制御部105のレーザ位置算出部105hは、2番目の計測点における界面位置Z、基準界面位置Z0及び基準レーザ位置H0に基づいて、該2番目の計測点におけるレーザ位置Hを算出する。制御部105の移動部駆動制御部105jは、位置検出部105gから、2番目の検出通知を受信する前に、上記算出されたレーザ位置Hになるように、移動部115を制御して接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。その結果、2番目の計測点が照射位置Gに到達すると、接合用レーザ102の焦点が界面に合っている状態で接合がおこなわれる(図12のe)。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われる。
【0091】
その後、終了地点PNが照射位置Gに到達し(図12のf)、該終了地点PNの接合がされた時点で、1つの接合予定線に沿った接合処理は終了となり、制御部105は、接合用レーザ102、移動部115及びステージ駆動部108aの動作を停止させる。
【0092】
(第2の実施例)
本実施形態に係る実施例として、接合用レーザ102から透明部材101a、101bの内部に焦点を合わせてレーザ光を照射し、該透明部材の端面から発光の観測を行った。透明部材101a、101bには、それぞれ1mm厚の青板ガラスを用いた。接合用レーザ102にはフェムト秒ファイバレーザを用い、パルス幅500fs、繰り返し周波数100kHz、平均強度400mW、波長1.04μmとした。接合用レーザのレンズ102aにはNA=0.4のものを用いた。また、雰囲気は大気とした。界面位置の測定時の接合用レーザ102の平均強度は、透明部材を融解しない程度の低出力、例えば100mWにするとより望ましい。
【0093】
この条件でレーザ光の照射を行った際に、計測部103により撮影された像を図13(a)及び図13(b)に示す。各図中の線Zは透明部材101a、101bの界面の位置(不可視)を表すために引いた線である。図13(a)は、基準状態の像である。この像から、線Zより上に接合用レーザ102の焦点112aにおける発光が観察され、線Zより下に接合用レーザ102の反対点112bにおける発光が観察されていることがわかる。なお、この状態では、接合用レーザ102の焦点112aは、接合用レーザ102の光軸方向に沿って界面より上側の50μmの地点に合わせられている。図13(b)は、接合用レーザ102の焦点112aの位置が、基準状態より接合用レーザ102の光軸方向に沿って上側に50μmずれている状態(つまり、焦点112aは界面より100μm上側にある状態)の像である。これらの像から、例えば上述の発光強度分布を取得して、焦点112aにおける光の位置と、反対点112bの位置とを特定することによって、特定の計測点における界面位置を算出することができる。その後、該計測点が接合される時に、該界面位置に焦点が合うように接合用レーザ102の位置を調整することができる。
【0094】
なお、本実施例においては、意図的にレーザ光焦点の基準状態からのずれを生じさせるために、接合用レーザ102のレンズ102aの位置を、図中の上方向、つまり接合用レーザ102の光軸方向に沿って透明部材101a、101bから遠ざかる方向に50μm移動させた。これにより、接合用レーザ102の焦点112aの位置に、接合用レーザ102の光軸方向に沿って基準状態より図中の上方向に50μmのずれが生じた。
なお、本実施例と異なり、焦点位置のずれが透明部材101a、101bの厚さが変わることにより生じたとしても、撮影される像は本実施例の場合と本質的に変わらないことを理解されたい。
【0095】
本実施形態では接合用レーザのみで界面位置の測定と接合との両方を行っているが、モニタ用レーザを別に設け、モニタ用レーザによって各計測点における界面位置の計測及び記憶を行った後に、記憶された界面位置を読み出して接合用レーザの位置を補正して接合を行うように構成しても構わない。その場合には装置構成としては第1の実施形態と同一となる。
【0096】
上述の第1の実施形態及び第2の実施形態は、両方とも焦点と反対点とが界面を挟んで等距離に観測できるという事実を利用してレーザ光焦点の界面からのずれを測定している。すなわち、第1の実施形態では焦点と反対点との間の距離の変化を用いており、第2の実施形態では焦点と反対点との間の中点の位置(つまり界面位置)の変化を用いているが、これらは実質的には同じことである。したがって、レーザ光焦点の界面からのずれを測定するために、第1の実施形態の装置構成において焦点と反対点との間の中点の位置の変化を用いてもよいし、第2の実施形態の装置構成においてで焦点と反対点との間の距離の変化を用いてもよい。
【符号の説明】
【0097】
100、200 レーザ照射装置
101a、101b 透明部材
102 接合用レーザ
102a 接合用レーザのレンズ
102b 接合用レーザ光源
103 計測部
104 可動ステージ
105 制御部
105a 発光間距離取得部
105b 変位算出部
105c、105j 移動部駆動制御部
105d 基準値取得部
105e、105g 位置検出部
105f 界面位置取得部
105h レーザ位置算出部
105i 位置検出部
106 表示部
107 入力操作部
108a ステージ駆動部
108b ロータリエンコーダ
110、117 レーザ光
111 界面
112a、118a 焦点
112b、118b 反対点
114 モニタ用レーザ
114a モニタ用レーザのレンズ
114b モニタ用レーザ光源
115 移動部
119a、119b、119c、119d、119e、119f ピーク
120 記憶部
A 搬送方向
B 移動方向
C 測定位置
D 接合位置
E 開始地点
F 終了地点
G 照射位置
Z 界面位置
【技術分野】
【0001】
本発明は、重ね合わされた透明な部材の界面にレーザ光を照射して行うレーザ接合において、レーザ光焦点を界面に合わせる方法及び装置に関する。
【背景技術】
【0002】
従来、ガラス等の透明部材同士の界面にレーザ光を照射して接合する手法が知られている。しかしながら、重ね合わせられた透明部材同士の界面を検出することは難しいため、その界面上にレーザ光の焦点を合わせることは困難である。そのため、レーザ光の焦点が界面からずれてしまい、接合が部分的に行われない、又は接合強度が低下してしまうという問題が発生することがあった。
【0003】
特許文献1に記載されている技術においては、重ね合わされた2枚の透明部材の界面にレーザ光の吸収剤を塗布してからレーザ光を照射し、溶接を行う。これにより、レーザ光の焦点が界面から多少ずれたとしても、レーザ光のエネルギーを界面上の吸収剤が吸収するため、透明部材同士の接合が行われる。
【0004】
特許文献2に記載されている技術は、被加工物の表面にレーザ光の焦点を合わせて溶接を行うための装置を提供する。そのために、溶接対象箇所に低出力のレーザ光を照射し、発生するプラズマの輝度を光センサにより計測する。レーザ光の焦点が表面に合っている時にプラズマ輝度が最大になるため、プラズマ輝度が最大になるようにレーザ光の焦点位置を調整することによって、高精度のレーザ溶接を実現している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−170290号公報
【特許文献2】特開昭59−218291号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示された技術では、レーザ光の焦点が透明部材同士の界面からずれたとしても接合が可能であるが、レーザ光の焦点を該界面に合わせるように補正することはできない。また、界面にレーザ光の吸収剤を塗布するためのコストと手間が必要であり、また吸収剤が接合後にも残留するという問題がある。
【0007】
特許文献2に開示された技術は、レーザ光を被加工物の表面に照射して溶接するものであるため、被加工物と空気との界面にレーザ光の焦点を合わせることを前提としている。その前提に基づけば、レーザ光の焦点が被加工物の表面に合っていない場合は、被加工物表面でのレーザスポット径が大きくなり、プラズマ輝度が変化する。しかしながら、この手法は、用いるレーザ光に対して透明な透明部材同士の界面を接合する際には適用できない。透明部材同士を密着させて重ね合わせると、用いるレーザに対して略一体となった透明体となる。その状態では、たとえレーザ光の焦点が透明部材同士の界面に合っていないとしても、焦点が透明部材中に位置することには変わりなく、プラズマ輝度の変化はほとんど起こらない。
【0008】
本発明の目的は、透明部材同士の界面にレーザ光を照射して接合を行う際に、レーザ光焦点を界面に合わせることが可能な方法及び装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明者は、上記の目的を達成するために鋭意研究を行った結果、重ね合わせた2つの少なくとも可視光に対して透明な透明部材の一方の内部に、該透明部材を透過するレーザ光を該透明部材の内部に焦点を合わせて照射し、プラズマを発生させた状態で、該2つの透明部材の端面側から目視又はカメラ撮影することにより、他方の透明部材の内部にも発光を観測できることを見出した。本明細書においては、焦点とは別に該発光が観測される場所を、反対点と呼ぶこととする。また、該プラズマ光と該発光とは、2つの透明部材の界面を挟んでほぼ等距離にあることも見出した。本発明は、この現象を利用することによって、レーザ光の焦点を界面に合わせることができる。
【0010】
本発明の第1の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光を出射する第1のレーザ光源と、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第2のレーザ光を出射する第2のレーザ光源と、前記第1のレーザ光を、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光する第1の集光レンズと、前記第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する第2の集光レンズと、前記第2の集光レンズを移動させる移動手段と、少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御する制御手段と、を備えることを特徴とする。
【0011】
本発明の第2の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光及び第2のレーザ光を切り替えて出射するレーザ光源と、前記第1及び第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する集光レンズと、前記集光レンズを移動させる移動手段と、少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、前記移動手段を制御する制御手段と、を備え、前記変位を取得する時には、前記レーザ光源が前記第1のレーザ光を出射し、前記集光レンズが前記第1のレーザ光を前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光するように作動し、前記界面の接合を行う時には、前記レーザ光源が前記第2のレーザ光を出射し、前記集光レンズが前記第2のレーザ光を前記第1及び第2の透明部材の内部に焦点を合わせるように集光し、前記制御手段が前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御するように作動することを特徴とする。
【0012】
本発明の第3の態様は、少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射方法であって、重ね合された前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせて第1のレーザ光を照射することと、前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部に焦点を合わせて第2のレーザ光を照射することと、少なくとも前記第1のレーザ光が照射されている間に、前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測することと、前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得することと、前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させることと、を備えることを特徴とする。
【発明の効果】
【0013】
本発明によれば、透明部材同士の接合時に、レーザ光の焦点を界面に正確に合わせることができ、高精度のレーザ接合を実現することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態に係る、レーザ照射装置の概略図である。
【図2】(a)焦点が基準状態からずれていない場合の発光位置を表す模式図である。(b)焦点が基準状態からずれている場合の発光位置を表す模式図である。(c)焦点が基準状態からずれている場合の発光位置を表す模式図である。
【図3】(a)発光強度の分布を示す図である。(b)発光強度の分布を示す図である。
【図4】本発明の一実施形態に係る、レンズを移動させる移動部を制御するためのブロック図である。
【図5】接合動作の各ステップにおけるレーザ光照射位置を示す図である。
【図6】(a)焦点が界面に合っている場合の発光位置を表す模式図である。(b)焦点が界面に合っていない場合の発光位置を表す模式図である。
【図7】(a)焦点ずれが発生していない状態で透明部材を撮影した像を示す図である。(b)焦点ずれが発生している状態で透明部材を撮影した像を示す図である。
【図8】本発明の一実施形態に係る、レーザ照射装置の概略図である。
【図9】発光位置と界面位置の関係を示す模式図である。
【図10】発光強度の分布を示す図である。
【図11】本発明の一実施形態に係る、レンズを移動させる移動部を制御するためのブロック図である。
【図12】接合動作の各ステップにおけるレーザ光照射位置を示す図である。
【図13】(a)焦点ずれが発生していない状態で透明部材を撮影した像を示す図である。(b)焦点ずれが発生している状態で透明部材を撮影した像を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照して、本発明の実施の形態を説明するが、本発明は本実施形態に限定されるものではない。なお、以下で説明する図面で、同機能を有するものは同一符号を付け、その繰り返しの説明は省略することもある。
【0016】
(第1の実施形態)
図1は、本実施形態に係るレーザ照射装置100の概略構成図である。レーザ照射装置100は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、該接合用レーザ102から出射されるレーザ光の光軸方向と平行にレーザ光を出射するモニタ用レーザ114と、透明部材101a、101bを端面側から撮影するための計測部103と、透明部材101a、101bを載置するための可動ステージ104と、可動ステージ104を矢印A(透明部材101a、101bの搬送方向)に沿って移動させるためのモータ及び該モータに設けられたロータリエンコーダ108bを有するステージ駆動部108aと、接合用レーザ102のレンズ102aを矢印B(接合用レーザ102から出射されるレーザ光の光軸方向)に沿って移動させるための移動部115と、を備える。接合用レーザ102、モニタ用レーザ114、移動部115、計測部103、及びステージ駆動部108aは、各部位を協調的に制御するための制御部105に接続される。制御部105には、ユーザに情報を出力するための表示部106及びユーザからの入力を受けるための入力操作部107が設けられる。
【0017】
本発明において、透明部材101a、101bには、可視光の少なくとも一部に対して透明であり、かつ用いるレーザ光を透過可能なものを用いる。また、本発明の基となる現象は異素材間の接合でも同様に発生するため、透明部材101a、101bは、同一の素材でなくてもよい。透明部材101a、101bには、例えば、ソーダガラス(青板ガラス又は白板ガラス)、ホウケイ酸ガラスが利用できる。
【0018】
透明部材101a、101bは各部位において多少なりとも厚さや表面形状に差があるため、レーザ光を照射する位置によって、レーザ光の光軸方向に対する界面の位置が相対的に変わることがある。例えば、レーザ光を照射する位置において、下側の透明部材101bが厚くなれば、界面は図中の上方向、つまり接合用レーザ102に近付く方向にシフトし、下側の透明部材101bが薄くなれば、界面は図中の下方向、つまり接合用レーザ102から遠ざかる方向にシフトする。そのため、透明部材101a、101bを移動させながらレーザ接合を行っていると、レーザ光の焦点が、界面に合わないことがある。その結果、部分的に接合が行われなかったり、接合強度が低下したりして、接合品質の低下が起こる。本発明によれば、レーザ光の光軸方向に沿って透明部材同士の界面の位置が一定ではない場合にも、該界面に該レーザ光の焦点を合わせるように補正しながら接合を行うことができるため、接合品質を改善することができる。
【0019】
接合用レーザ102は、接合用レーザ光源102bとレンズ102aとを備える。透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a、101bの界面に焦点が合うように集光され、それによって透明部材101a、101bの界面を接合させる。接合用レーザ102からのレーザ光は、透明部材101a、101bを融解して接合できる出力になるよう構成されている。その際に、レーザ光の焦点の近傍には、プラズマが発生する。なお、図1では接合用レーザ光源102bとレンズ102aとが離れて構成されているが、接合用レーザ光源102bとレンズ102aとが一体で設けられていてもよい。
【0020】
モニタ用レーザ114は、モニタ用レーザ光源114bとレンズ114aとを備える。透明部材101a、101bの界面の法線方向からモニタ用レーザ光源114bにより出射されるレーザ光は、レンズ114aによって、透明部材101a及び101bのいずれか一方の内部であって、透明部材101a、101bの界面から所定の距離離れた地点に焦点が合うように集光され、それによって透明部材101a又は101bの内部にプラズマを発生させる。モニタ用レーザ114からのレーザ光は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力であることが好ましい。そうすることで、接合したい界面以外の場所の融解又は劣化を低減させることができる。なお、図1ではモニタ用レーザ光源114bとレンズ114aとが一体的に構成されているが、モニタ用光源レーザ114bとレンズ114aとが離れて設けられていてもよい。
【0021】
モニタ用レーザ114のレンズ114aは、可動ステージ104に対して、レンズ114aから出射されるレーザ光の光軸方向において相対的に固定されている。例えば、図1において可動ステージ104が載置面の法線方向(z軸方向とする)、すなわちモニタ用レーザ114の光軸方向に移動可能ならば、レンズ114aもz軸方向に追随するように移動するように構成される必要がある。なぜなら、ある基準状態でのモニタ用レーザ114の焦点の位置を基準として、透明部材の厚さ変動等によりz軸方向の界面位置のずれが生じた場合の、モニタ用レーザ114の焦点のずれ量をモニタリングし、該ずれ量を用いて結合用レーザ102の焦点の位置を補正するため、可動ステージ104の載置面をz軸方向の原点とした場合の、レンズ114aの座標は一定である必要があるのである。
【0022】
移動部115は、例えばピアゾアクチュエータ等であり、制御部105によって制御される。そして、移動部115は、レンズ102aを、矢印Bに沿って、接合用レーザ102から出射されるレーザ光の光軸方向に移動させることができる。その結果、移動部115は、レンズ102aを所望の位置に移動することができる。
【0023】
ステージ駆動部108aは、計測及び接合と並行して透明部材101a、101bを矢印Aの方向に移動させる。この際に、ステージ駆動部108aの有するモータの回転数をロータリエンコーダ108bにより取得することで、計測及び接合を行っている位置を正確に計測することができる。別の方法としては、接合用レーザ102、移動部115、モニタ用レーザ114、及び計測部103を、矢印Aの逆方向に動かしても同様の作用が得られる。
【0024】
計測部103は、少なくともモニタ用レーザ114からのレーザ光が透明部材101a、101bに照射されている間に、透明部材101a、101bの端面側から像を撮影する。計測部103は、少なくともモニタ用レーザ114からのレーザ光の焦点の周辺を含む領域を撮影できるように構成される。レーザ光により透明部材101a、101bの内部で発生されたプラズマからの発光が、透明部材101a、101bの内部を通過し、計測部103により像として記録される。計測部103には、例えばCCDカメラ、一次元イメージセンサなど、一次元又は二次元で発光の分布を取得できるものであればいずれも利用することができる。
【0025】
図1に示すように、透明部材101a、101bは、計測位置Cを経て接合位置Dへと矢印Aで示す方向に、接合予定線に沿って搬送される。そして、計測部103は、接合用レーザ102に対して透明部材101a、101bの搬送方向上流で、少なくともモニタ用レーザ114からのレーザ光の焦点の周辺を含む領域を、透明部材101a、101bの端面側から撮影できるように配置されている。
【0026】
制御部105は、所望のタイミングでレーザ光を出射させるように接合用レーザ102及びモニタ用レーザ114を制御することができる。また、制御部105は、透明部材101a、101の端面側からの像を撮影するように計測部103を制御し、該像から所望の情報を取得することができる。さらに、制御部105は、移動部115の動作を制御して接合用レーザ102のレンズ102aを所望の位置に移動させることができる。さらに、制御部105は、ステージ駆動部108aの動作を制御することができ、ロータリエンコーダ108bから、駆動部108aが有するモータの回転情報を受信するように構成されている。
【0027】
制御部105は、記憶部120やCPU(不図示)等を有している。該CPUは、記憶部120に記憶されたプログラム等に基づいて、レーザ照射装置100を統括的に制御する。記憶部120は、CPUが動作するためのシステムワークメモリであるRAM、及び上記プログラムやシステムソフトウェア等を格納するROM、ハードディスクドライブ等を有する。本実施形態では、CPUが、ROMやハードディスクドライブに記憶された本実施形態に係る処理などの制御プログラムに従って、種々の演算、制御、判別などの処理動作を実行することができる。
【0028】
表示部106は、計測部103により撮影される像や、該像から取得される情報を表示するためのディスプレイを含む。さらに、表示部106は、ずれの発生をユーザに音や光を用いて通知するための音声スピーカーや、インジケータランプ等の通知機能を備えてもよい。入力操作部107は、ユーザが制御部に指示を行うためのキーボードやスイッチ等のインターフェースを含む。
【0029】
本実施形態では、レーザ接合される前段階において、接合予定領域に対して計測位置Cにおいてモニタ用レーザ114の焦点のずれが計測され、該ずれの変位が算出される。その後、接合位置Dにおいて接合用レーザ102がずれ計測箇所を接合するときに、該変位を相殺するように移動部115を制御してレンズ102aを移動させておく。この状態で接合用レーザ102からレーザ光を照射することによって、該レーザ光の焦点を界面に正確に合わせることができる。
【0030】
図2(a)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、ずれの基準とする状態(基準状態と呼ぶ)において、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。基準状態においては、接合用レーザ102の焦点が透明部材101a、101bの界面に合うように調整されている。図2(b)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、モニタ用レーザ114の焦点118aが基準状態に比べて図中の上方向、つまりモニタ用レーザ114に近付く方向にずれている場合に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。図2(c)は、モニタ用レーザ114からのレーザ光117を透明部材101aの内部に照射する際に、モニタ用レーザ114の焦点118aが基準状態に比べて図中の下方向、つまりモニタ用レーザ114から遠ざかる方向にずれている場合に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。
【0031】
図2(a)に示す基準状態においては、モニタ用レーザ114の焦点118aにおいて発生されるプラズマによる発光に加えて、焦点118aから界面111をはさんで反対側の地点118b(反対点118bと呼ぶ)においても発光が観測される。焦点118aと反対点118bとは、界面111に対して等しい距離Mに位置している。このとき、焦点118aと反対点118bとの間の距離は2Mである。
【0032】
図2(b)に示すように、モニタ用レーザ114の焦点118aが基準状態に比べて図中の上方向に距離Nの分ずれる、すなわち界面111が焦点118aに対して相対的に下方向に距離Nの分ずれると、反対点118bは基準状態に比べて図中の下方向に距離Nの分ずれる。このとき、焦点118aと反対点118bとの間の距離は2M+2Nに変化する。
【0033】
図2(c)に示すように、モニタ用レーザ114の焦点118aが基準状態に比べて図中の下方向に距離Nの分ずれる、すなわち界面111が焦点118aに対して相対的に上方向に距離Nの分ずれると、反対点118bは基準状態に比べて図中の上方向に距離Nの分ずれる。このとき、焦点118aと反対点118bとの間の距離は2M−2Nに変化する。
【0034】
したがって、焦点118aと反対点118bとの間の距離を測定することによって、モニタ用レーザ114の焦点118aの、基準状態に対するずれの大きさと向き(図中の上方向又は下方向)を検知することができる。基準状態での焦点118aと反対点118bとの間の距離をX0とし、測定時の該距離をXとすると、変位ΔXは次の式(1)で求められる。
【0035】
ΔX=(X−X0)/2 (1)
【0036】
変位ΔXが0のとき、モニタ用レーザ114の焦点118aに基準状態からのずれは発生していないため、接合用レーザ102の焦点は界面からずれていないと判定できる。変位ΔXが0より大きいとき、焦点118aは基準状態から図中の上方向に変位ΔXの絶対値の分だけずれが発生しているため、その領域における界面は下方向にΔXの絶対値の分だけずれていると判定できる。変位ΔXが0より小さいとき、焦点118aは基準状態から図中の下方向に変位ΔXの絶対値の分だけずれが発生しているため、その領域における界面は上方向にΔXの絶対値の分だけずれていると判定できる。
【0037】
このように算出した基準状態からの変位ΔXを相殺するように、移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を界面に合わせることができる。
【0038】
焦点118a及び反対点118bにおいて観察される発光はそれぞれある程度の面積を持つように観察される。そのため、焦点118a及び反対点118bの間の距離を求めるためには、何らかの手法を用いて焦点118a及び反対点118bにおける発光の像から焦点118a及び反対点118bを定める必要がある。この判定を行うためには、必要とする精度に応じていかなる手法を用いてもよい。
【0039】
例えば、計測部103により撮影される像から焦点118a及び反対点118bを含む領域の発光強度分布を取得し、その形状を利用して焦点118a及び反対点118bの位置を定めてもよい。図3(a)及び図3(b)は、計測部103により撮影される像から取得できる焦点118a及び反対点118bを含む領域の発光強度分布を模式的に表すグラフである。図3(a)及び図3(b)の実線は、図2(a)の状態(基準状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(a)の破線は、図2(b)の状態(基準状態より焦点が上方向にずれている状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(b)の破線は、図2(c)の状態(基準状態より焦点が下方向にずれている状態)で撮影される像から取得できる発光強度分布を模式的に表すグラフである。図3(a)及び図3(b)の横軸は透明部材101a、101bの界面からの、透明部材101a、101bの厚さ方向における距離を表し、縦軸は発光強度を表す。
【0040】
このような発光強度分布においては、焦点118a及び反対点118bにおいて発光強度はピークとなるものとみなせる。したがって、図3(a)の実線のピーク119a、119bの位置を、それぞれ基準状態の焦点118a及び反対点118bの位置とし、図3(a)の破線のピーク119c、119dの位置を、それぞれモニタ用レーザ114の焦点118aが基準状態より上方向にずれている状態の焦点118a及び反対点118bの位置とすることができる。よって、ピーク119a、119b間の距離が式(1)におけるX0となり、ピーク119c、119d間の距離が式(1)におけるXとなるため、変位ΔXが計算できる。同様に、図3(b)の実線のピーク119a、119bの位置を、基準状態の焦点118a及び反対点118bの位置とみなし、図3(b)の破線のピーク119e、119fの位置を、モニタ用レーザ114の焦点118aが基準状態より下方向にずれている状態の焦点118a及び反対点118bの位置とみなすことができる。よって、ピーク119a、119b間の距離が式(1)におけるX0となり、ピーク119e、119f間の距離が式(1)におけるXとなるため、変位ΔXが計算できる。
【0041】
図4は、本実施形態に係る移動部115の移動を制御するための構成を示すブロック図である。
発光間距離取得部105aは、透明部材101a、101bを端面側から撮影するように計測部103を制御し、該計測部103から受信した像から、モニタ用レーザ114の焦点118aにおける発光と、反対点118bにおける発光との間の距離(式(1)におけるX)を算出する。距離Xを算出するためには、上述の発光強度分布を用いることができる。取得された距離Xは、記憶部120に格納される。発光間距離取得部105aからの計測指令により計測部103は、計測位置Cにおいて、距離Xを取得するための計測を行うが、該計測時において計測位置Cに位置する透明部材101a、101bの領域を、「計測点」と呼ぶことにする。すなわち、該計測点における距離Xが計測されることになる。なお、本実施形態では、発光間距離取得部105aは、接合予定線に沿って所定の間隔d毎に距離Xを取得するように構成されている。よって、計測開始時に計測位置Cに位置する透明部材101a、101bの領域が1番目の計測点となり、該計測開始時に計測位置Cに位置する領域から、接合予定線と一致する搬送方向(矢印方向A)に沿って所定の間隔dだけずれた位置が2番目の計測点となる。よって、k番目(kは2以上の整数)の計測点は、k−1番目の計測点から上記所定の間隔dだけ離間している。発光間距離取得部105aは、計測点の順序に関連付けて距離Xを記憶部120に格納する。よって、記憶部120には、1番目〜k番目の計測点の各々について、対応する距離Xが関連付けて格納されている。
【0042】
基準値取得部105dは、焦点ずれの基準とする基準値を取得する。本実施形態においては、1つ前の計測時(k−1番目の計測点、kは2以上の整数)を基準状態とする。したがって、基準値取得部105dは、2番目〜k番目の計測点の各々について、1つ前の計測時の距離Xを記憶部120から抽出して基準距離(式(1)におけるX0)として利用する。1番目の計測点においては、焦点が界面に合うように予め調整を行い、それ自身の距離を基準状態として利用する。
別の方法としては、1番目の計測点を基準状態として、1番目の計測点における距離Xを基準距離X0としてもよい。
【0043】
変位算出部105bは、発光間距離取得部105aにて取得された距離Xと基準値取得部105dにて取得された基準距離X0とにより、式(1)を用いて変位ΔXを算出する。変位算出部105bは、1番目〜k番目の計測点の各々について、対応する変位ΔXを関連付けて記憶部120に格納する。
【0044】
位置検出部105eは、透明部材101a、101bの計測点が接合位置Dに位置することを検出し、計測点が接合位置Dに位置することを移動部駆動制御部105cに通知する。具体的には、位置検出部105eは、ロータリエンコーダ108bから受信したステージ駆動部108aが有するモータの回転情報に基づいて、各計測点が接合位置Dに位置することを検知する。本実施形態では、接合用レーザ102とモニタ用レーザ114との位置関係は、透明部材101a、101bの搬送方向(矢印A)については不変であるので、計測位置Cと接合位置Dとの間の距離は一定である。よって、ステージ駆動部108aが有するモータの回転により透明部材101a、101bが搬送される場合において、計測位置Cを通過したある領域が接合位置Dに位置することを上記回転情報から検知することができるのである。本実施形態では、位置検出部105eは、1番目の計測点が接合位置Dに位置することを上記回転情報に基づいて検出し、該検出結果を移動部駆動制御部105cに通知する。2番目の計測点については、位置検出部105eは、上記回転情報に基づいて、1番目の計測点の検出(計測点が接合位置Dに位置することの検出)から上記所定の間隔dだけ透明部材101a、101bが移動した後に、移動部駆動制御部105cに2番目の計測点の検出を通知する。すなわち、位置検出部105eは、移動部駆動制御部105cへの、k番目の計測点の検出通知(計測点が接合位置Dに位置することを検出したことの通知)については、上記回転情報に基づいて、k−1番目の検出から所定の間隔dだけ透明部材101a、101bが移動する毎に行うように構成されている。従って、移動部駆動制御部105cは、各計測点が接合位置Dに位置することを知ることができる。
【0045】
移動部駆動制御部105cは、透明部材101a、101bの、計測部103にて距離Xを計測した領域(計測点)について、接合用レーザ102の光軸方向に沿って接合用レーザ102のレンズ102aを移動させることによって、変位算出部105bにて算出された変位ΔXを相殺するように、移動部115を作動させる。具体的には、移動部駆動制御部105cは、上記回転情報に基づいて1番目の計測点が接合位置Dに位置する前に、該1番目の計測点に対応する変位ΔXを記憶部120から読み出す。変位ΔXが0より大きい場合には、接合用レーザ102の焦点の位置が界面より上方向に変位ΔXの絶対値分ずれているため、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを下方向に変位ΔXの絶対値分移動させることによって、変位ΔXを相殺する。変位ΔXが0より小さい場合には、接合用レーザ102の焦点の位置が界面より下方向に変位ΔXの絶対値分ずれているため、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを上方向に変位ΔXの絶対値分移動させることによって、変位ΔXを相殺する。変位ΔXが0に等しい場合には、接合用レーザ102の焦点の位置が界面に合っているため、何もしない。また、移動部駆動制御部105cには、位置検出部105eから計測点の序数通り(計測部103による計測の順番通り)に上記検出通知が送信されるので、移動部駆動制御部105cは、k−1(kは2以上の整数)番目の検出通知を受信してからk番目の計測点に対応する変位ΔXを記憶部120から読み出し、k番目の検出通知を受信する前に、レンズ102aを光軸方向に沿って移動させることによって、変位算出部105bにて算出された変位ΔXを相殺するように、移動部115を作動させる。例えば、位置検出部105eより1番目の検出通知を受信すると、移動部駆動制御部105cは2番目の計測点に対応する変位ΔXを記憶部120から読み出し、2番目の検出通知を受信する前に、該読み出された変位ΔXを相殺する。また、2番目の検出通知を受信すると、3番目の計測点に対応する変位ΔXを記憶部120から読み出し、3番目の検出通知を受信する前に、該読み出された変位ΔXを相殺する。このように制御することにより、ある計測点にとっては、該計測点が接合位置Dに位置する時には、上記ある計測点に応じた変位ΔXを相殺しておく、つまり接合用レーザ102の焦点の位置を界面に合わせておくことができる。
【0046】
なお、図2(a)、図2(b)及び図2(c)においては、上側の透明部材101aの内部に焦点118aを合わせているが、下側の透明部材101bの内部に焦点118aを合わせてもよい。その場合には、反対点118bが上側の透明部材101aの内部に形成される点が異なるのみであり、式(1)の符号を逆にすれば、上述の界面に焦点を合わせる方法は同様に適用できることは理解されたい。
【0047】
以下に本実施形態に係る接合動作の一例を説明する。
図5は、本実施形態に係る接合動作の各ステップにおけるレーザ光の照射位置を模式的に示す図である。最初に、ユーザは、透明部材101a、101bを重ね合わせて可動ステージ104上に載置する。このとき、接合の開始地点Eが接合用レーザ102の光軸方向にある接合位置Dに位置するようにする(図5のa)。この状態で、接合用レーザ102の焦点が界面に合うように開始地点Eにおける焦点合わせ(初期調整と呼ぶ)を行う。
【0048】
例えば、初期調整を、接合用レーザ102の焦点及び反対点を観察することにより行うことができる。その場合には、計測部103は、モニタ用レーザ114の焦点の周辺を含む領域に加えて、接合用レーザ102の焦点の周辺を含む領域を撮影できるように構成される。ユーザが初期調整の指示を入力操作部107から行うと、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を表示部106に表示させる。その際に、計測部103により撮影される像の中で観測される発光の位置の模式図を、図6(a)及び図6(b)に示す。図6(a)に示すように、接合用レーザ102の焦点112aが界面111に合っている場合には、焦点112aにおいて発生されるプラズマによってのみ発光が観測される。それに対して、図6(b)に示すように、接合用レーザ102の焦点112aが、界面111から接合用レーザ102の光軸方向にずれている場合には、焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。なお、焦点112aと反対点112bとは、界面に対して等しい距離Lに位置している。
【0049】
したがって、ユーザは表示部106を見て、焦点112a及び反対点112bに係る2つの発光が観測される場合には、発光が1つになるように(つまり、図6(b)の状態から図6(a)の状態になるように)、接合用レーザ102のレンズ102aの位置を光軸方向に沿って調整することによって、接合用レーザ102の焦点が界面に合うようにする。具体的には、ユーザが入力操作部107から、レンズ102aを上方向又は下方向へ所望の距離移動させる指示を出し、該指示に従って制御部105が移動部115を作動させてレンズ102aを光軸方向に沿って移動させる。ユーザが直接、レンズ102aの位置を調整しても構わない。本実施形態ではレンズ102aのみが移動されているが、接合用レーザ光源102bとレンズ102aとが一体化されて移動されるように構成されてもよい。
【0050】
なお、初期位置における焦点合わせの具体的な手法は、上述の手法に限らず、当技術分野で周知の手段を利用して焦点合わせを行ってもよい。
【0051】
その後、初期位置においてモニタ用レーザ114の焦点118aが、上側の透明部材101aの内部であって、界面111から離間した位置に焦点が合うように調整する。初期位置において、制御部105は、計測部103を制御して透明部材101a、101bの像を撮影させ、該像を表示部106に表示させる。ユーザは表示部106を見て、焦点118aにおける発光及び反対点118bにおける発光の両方が計測部103によって撮影可能な範囲に入るように、モニタ用レーザ114の位置を調整する。そのために、モニタ用レーザ114の取り付け位置を手動で変更してもよいし、モニタ用レーザ114を光軸方向に移動するための移動部をさらに設けてもよい。モニタ用レーザ114のレンズ114aのみの位置を調整してもよい。モニタ用レーザ114の位置は、焦点118aにおける発光と反対点118bにおける発光とが十分に分離されるように調整することが望ましい。
【0052】
初期位置での調整を行った後、ユーザは入力操作部107から制御部105に対して接合処理の開始指示を行う。開始指示を受けると、制御部105は、ステージ駆動部108aを制御して、初期調整が行われた開始地点Eが、モニタ用レーザ114の光軸方向にある計測位置Cに位置するように透明部材101a、101bを移動させる(図5のb)。次いで、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、モニタ用レーザ114を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。同時に、制御部105は、計測部103を制御して透明部材101a、101bのモニタ用レーザ114の焦点の周辺を含む領域を撮影させ、撮影された像を取得し、該像から発光間の距離Xを算出する。すなわち、搬送開始時において計測位置Cに位置する透明部材101a、101bの領域(開始地点E)が、1番目の計測点となり、該1番目の計測点における距離Xを算出する。制御部105は、1番目の計測点が接合位置Dに到着する前に、接合用レーザ102を駆動してレーザ光の照射を開始し、接合時にはレーザ光を連続照射させる。接合用レーザ102からのレーザ光の照射開始は、ロータリエンコーダ108bからの回転情報に基づいて行えばよい。
【0053】
1番目の計測点(開始地点E)が接合位置Dに到達すると接合が開始され(図5のc)、それ以降は計測位置Cにおいて計測された距離X及び基準距離X0(1つ前の計測点における距離Xを用いる)から式(1)によって算出される変位ΔXを基づいて、接合用レーザ102の焦点位置の調整が行われる。2番目の計測点は、透明部材101a、101bにおいて、1番目の計測点から所定の間隔dだけ離間した位置であり、該2番目の計測点が計測位置Cに到達すると、計測部103は2番目の計測点における距離Xを取得する。制御部105の変位算出部105bは、2番目の計測点における距離X及び記憶部120に記憶されている基準距離X0(1番目の計測点における距離Xを用いる)に基づいて、該2番目の計測点における変位ΔXを算出する。制御部105の移動部駆動制御部105cは、位置検出部105eから1番目の検出通知を受けると、2番目の検出通知を受信する前に、上記算出された変位ΔXを相殺するように、移動部115を制御して接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われる。
【0054】
モニタ用レーザ114からのレーザ光の照射は、少なくとも接合の終了地点Fが計測位置Cに到達する(図5のd)まで行われる。その後、終了地点Fが接合位置Dに到達し(図5のe)、終了地点Fの接合がされた時点で、1つの接合予定線に沿った接合処理は終了となり、制御部105は、接合用レーザ102、移動部115、モニタ用レーザ114及びステージ駆動部108aの動作を停止させる。
【0055】
なお、本実施形態では、上記1番目の計測点における、上記距離Xの取得から、変位ΔXを相殺する移動部115の移動までの間にも、2番目〜k番目〜N(Nはk以上の整数)番目の計測点の各々について距離Xを取得している。従って、各計測点に対する距離Xの取得から算出された変位ΔXを相殺するための移動部115の移動までの動作については、他の計測点に対する諸動作と同時に行ってもよい。従って、この場合は、算出された変位ΔXの相殺を逐次行いながら連続照射されたレーザによる接合を行い、それと同時にレーザ照射される前の接合予定部の距離Xを逐次計測し、該接合予定部の変位ΔXの算出を逐次行う。
【0056】
本実施形態によれば、透明部材101a、101bの端面から観測される2つの発光の間の距離の変位を算出し、当該算出した変位に基づいて焦点の位置の補正が行われる。これにより、透明部材101a、101bの界面位置のばらつきを反映して、界面に焦点をより正確に形成することができる。すなわち、本実施形態では、透明部材101a、101bの接合予定線に沿った複数の領域(計測点)の各々において接合用のレーザ照射の前に予め透明部材101a、101bの内部に観測される2つの発光間の距離を求め、該求められた各々の距離から上記複数の領域の各々について界面位置の変位を求める。そして、上記複数の領域の各々がレーザ照射位置である接合位置Dに位置する時には、該変位を相殺するように接合用レーザ102のレンズ102aを移動させる。従って、透明部材101a、101bの界面位置が上記接合予定線に沿って変動していても、その変動に追従して該変動を緩和するようにレンズ102aを移動させることができる。よって、透明部材101a、101bの界面位置の変動があっても、接合予定線に沿って接合用レーザ102の焦点を界面に位置させることができる。そのため、透明部材101a、101bを確実にレーザ接合することができる。
【0057】
本実施形態では、変位ΔXを相殺するようにレンズ102aを移動させているが、ずれが発生した(つまり、変位ΔXが0でなくなった)時に、接合用レーザ102の動作を自動的に停止してもよい。また、ずれが発生した時に、表示部106から音や光を発することによってユーザにずれの発生を通知してもよい。これらの場合には、表示部106に、変位ΔXを表示することが好ましい。ユーザは変位ΔXの値を見て、接合処理を続行するか否かを判断することができる。ユーザは、接合処理を停止することを決断すると、入力操作部107から停止指示を行うことができる。停止指示を受けると、制御部105は、接合用レーザ102、移動部115、モニタ用レーザ114及びステージ駆動部108aの動作を停止させ、接合処理を停止する。
【0058】
(第1の実施例)
本実施形態に係る実施例として、モニタ用レーザ114から透明部材101a、101bの内部に焦点を合わせてレーザ光を照射し、該透明部材の端面から発光の観測を行った。透明部材101a、101bには、それぞれ1mm厚の青板ガラスを用いた。モニタ用レーザ114にはフェムト秒ファイバレーザを用い、パルス幅500fs、繰り返し周波数100kHz、平均強度400mW、波長1.04μmとした。モニタ用レーザのレンズ114aにはNA=0.4のものを用いた。また、雰囲気は大気とした。モニタ用レーザ114の平均強度は、透明部材を融解しない程度の低出力、例えば100mWにするとより望ましい。
【0059】
この条件でレーザ光の照射を行った際に、計測部103により撮影された像を図7(a)及び図7(b)に示す。各図中の線Zは透明部材101a、101bの界面の位置(不可視)を表すために引いた線である。図7(a)は、基準状態の像である。この像から、線Zより上にモニタ用レーザ114の焦点118aにおける発光が観察され、線Zより下にモニタ用レーザ114の反対点118bにおける発光が観察されていることがわかる。なお、この状態では、モニタ用レーザ114の焦点118aは、モニタ用レーザ114の光軸方向に沿って界面より上側の50μmの地点に合わせられている。図7(b)は、モニタ用レーザ114の焦点118aの位置が、基準状態よりモニタ用レーザ114の光軸方向に沿って上側に50μmずれている状態(つまり、焦点118aは界面より100μm上側にある状態)の像である。これらの像から、例えば上述の発光強度分布を取得して、焦点118aにおける光と、反対点118bにおける発光との間の距離を計算することによって、特定の計測点においてモニタ用レーザ114の焦点118aが基準状態からずれていると判定でき、さらにずれの方向及び大きさを求めることができる。その後、該計測点が接合される時に、該ずれを相殺するように接合用レーザ102のレンズ102aの位置を調整することができる。
【0060】
なお、本実施例においては、意図的にレーザ光焦点の基準状態からのずれを生じさせるために、モニタ用レーザ114のレンズ114aの位置を、図中の上方向、つまりモニタ用レーザ114の光軸方向に沿って透明部材101a、101bから遠ざかる方向に50μm移動させた。これにより、モニタ用レーザ114の焦点118aの位置に、モニタ用レーザ114の光軸方向に沿って基準状態より図中の上方向に50μmのずれが生じた。
なお、本実施例と異なり、焦点位置のずれが透明部材101a、101bの厚さが変わることにより生じたとしても、撮影される像は本実施例の場合と本質的に変わらないことを理解されたい。
【0061】
(第2の実施形態)
第1の実施形態では、接合用レーザとモニタ用レーザとを設け、モニタ用レーザによって計測したずれを、逐次接合用レーザの位置に反映させている。本実施形態では、前もって各地点の界面位置を測定して記憶しておき、接合時に記憶されている該界面位置を読み出して、レーザ光の焦点が界面に合うように接合用レーザの位置を制御する。本実施形態では接合用レーザが、モニタ用レーザの機能を兼ねて、界面位置の測定と接合との両方を行っている。
【0062】
図8は、本実施形態に係るレーザ照射装置200の概略構成図である。第1の実施形態との違いは、モニタ用レーザ114を備えない点である。
【0063】
レーザ照射装置200は、重ね合わされた透明部材101a、101bにレーザ光を照射するための接合用レーザ102と、透明部材101a、101bを端面側から撮影するための計測部103と、透明部材101a、101bを載置するための可動ステージ104と、可動ステージ104を矢印A(透明部材101a、101bの搬送方向)に沿って移動させるためのモータ及び該モータに設けられたロータリエンコーダ108bを有するステージ駆動部108aと、接合用レーザ102のレンズ102aを矢印B(接合用レーザ102から出射されるレーザ光の光軸方向)に沿って移動させるための移動部115と、を備える。接合用レーザ102、移動部115、計測部103、及びステージ駆動部108aは、各部位を協調的に制御するための制御部105に接続される。制御部105には、ユーザに情報を出力するための表示部106及びユーザからの入力を受けるための入力操作部107が設けられる。
【0064】
接合用レーザ102は、透明部材101a、101bの界面位置を測定する時及び接合を行う時の両方に用いられる。界面位置を測定する時には、透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a及び101bのいずれか一方の内部であって、透明部材101a、101bの界面から所定の距離離れた地点に焦点が合うように集光され、それによって透明部材101a又は101bの内部にプラズマを発生させる。界面位置を測定する時には、接合用レーザ102からのレーザ光は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力になるように調節される。そうすることで、接合したい界面以外の場所での融解又は劣化を低減させることができる。
接合を行う時には、透明部材101a、101bの界面の法線方向から接合用レーザ光源102bにより出射されるレーザ光は、レンズ102aによって、透明部材101a、101bの界面に焦点が合うように集光され、それによって透明部材101a、101bの界面を接合させる。接合を行う時には、接合用レーザ102からのレーザ光は、透明部材101a、101bを融解して接合できる出力になるよう調節される。その際に、レーザ光の焦点の近傍には、プラズマが発生する。なお、図8では接合用レーザ光源102bとレンズ102aとが離れて設けられているが、接合用レーザ光源102bとレンズ102aとが一体的に構成されていてもよい。
【0065】
計測部103は、第1の実施形態と異なり、接合用レーザ102からのレーザ光の照射位置Gの周辺を含む領域を撮影できるように構成される。
【0066】
図9は、界面位置を測定するために接合用レーザ102からのレーザ光110を透明部材101aの内部に照射する際に、計測部103により撮影される像の中で観測される発光の位置を模式的に示す図である。接合用レーザ102の焦点112aは、界面111より図中の上方向、つまり接合用レーザ102に近付く方向に所定の距離(図ではM)移動されている。この時、接合用レーザ102の焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。焦点112aと反対点112bとは、界面111に対して等しい距離Mに位置している。すなわち、接合用レーザ102の光軸方向に沿った界面位置Zは、焦点112aの位置と反対点112bの位置との中点である。
【0067】
したがって、焦点112a及び反対点112bの位置を測定することによって、接合用レーザ102の光軸方向に沿った界面位置を測定することができる。焦点112aの位置をZ1とし、反対点112bの位置をZ2とすると、界面位置Zは次の式(2)で求められる。なお、Z、Z1、及びZ2の位置は、測定及び接合で共通に用いられる任意の基準により定義する。例えば、計測部103が撮影する像の下端を0とし、接合用レーザ102からのレーザ光110の光軸に沿った上方向を正方向と定義することができる。
【0068】
Z=(Z1+Z2)/2 (2)
【0069】
本実施形態では、接合予定線に含まれる各地点の界面位置Zを前もって測定して、該界面位置Zを各地点に紐付けて記憶しておき、接合を行う際に各地点において移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を該界面位置Zに合わせることができる。
【0070】
焦点112a及び反対点112bにおいて観察される発光はそれぞれある程度の面積を持つように観察される。そのため、焦点112a及び反対点112bの位置を求めるためには、何らかの手法を用いて焦点112a及び反対点112bにおける発光の像から焦点112a及び反対点112bを定める必要がある。この判定を行うためには、必要とする精度に応じていかなる手法を用いてもよい。
【0071】
例えば、計測部103により撮影される像から焦点112a及び反対点112bを含む領域の発光強度分布を取得し、その形状を利用して焦点112a及び反対点112bの位置を定めてもよい。図10は、計測部103により撮影される像から取得できる焦点112a及び反対点112bを含む領域の発光強度分布を模式的に表すグラフである。図10の横軸は透明部材101a、101bの厚さ方向における、上述の任意の基準からの距離を表し、縦軸は発光強度を表す。
【0072】
このような発光強度分布においては、焦点112a及び反対点112bにおいて発光強度はピークとなるものとみなせる。したがって、図10のピーク119a、119bの位置を、それぞれ基準状態の焦点112a及び反対点112bの位置とすることができる。よって、ピーク119aの位置が式(2)におけるZ2となり、ピーク119bの位置が式(2)におけるZ1となるため、界面位置Zが計算できる。
【0073】
図11は、本実施形態に係る移動部115の移動を制御するための構成を示すブロック図である。以下では接合用レーザ102のレンズ102aの光軸方向に沿った位置をHとし、位置Hは界面位置の測定及び接合で共通に用いられる任意の基準により定義する。例えば、測定開始時のレンズ102aの位置Hを0として光軸に沿って上方向(接合用レーザ102に近付く方向)を正方向としてもよい。又は、同様に可動ステージ104の位置を0として上方向を正方向としてもよい。
まず、接合予定線内の各地点における界面位置の測定を行う。界面位置の測定の開始時には、接合用レーザ102の焦点112aの位置が、界面にあっている状態(このときのレンズ102aの位置Hを基準レーザ位置H0とする)より所定の距離Mの分、接合用レーザ102の光軸に沿った上方向に位置するように調整しておく。このとき、接合用レーザ102の位置はH0+Mである。界面位置取得部105fは、透明部材101a、101bを端面側から撮影するように計測部103を制御し、該計測部103から受信した像から、接合用レーザ102の焦点112a及び反対点112bの位置(式(2)におけるZ1、Z2)を測定し、式(2)の界面位置Zを算出する。界面位置Zを算出するためには、上述の発光強度分布を用いることができる。取得された界面位置Zは、記憶部120に格納される。界面位置取得部105fからの計測指令により計測部103は、照射位置Gにおいて、界面位置Zを取得するための計測を行うが、該計測時において照射位置Gに位置する透明部材101a、101bの領域を、「計測点」と呼ぶことにする。すなわち、該計測点における界面位置Zが計測されることになる。なお、本実施形態では、界面位置取得部105fは、接合予定線に沿って所定の間隔d毎に界面位置Zを取得するように構成されている。よって、計測開始時に照射位置Gに位置する透明部材101a、101bの領域が1番目の計測点となり、該計測開始時に照射位置Gに位置する領域から、接合予定線と一致する搬送方向(矢印方向A)に沿って所定の間隔dだけずれた位置が2番目の計測点となる。よって、k番目(kは2以上の整数)の計測点は、k−1番目の計測点から上記所定の間隔dだけ離間している。発光位置取得部105fは、計測点の順序に関連付けて界面位置Zを記憶部120に格納する。よって、記憶部120には、1番目〜k番目の計測点の各々について、対応する界面位置Zが関連付けて格納されている。
【0074】
界面位置の測定時には、位置検出部105gは、透明部材101a、101bの各計測点が照射位置Gに位置することを検出し、照射位置Gに各計測点が位置するたびに界面位置取得部105fに通知する。具体的には、位置検出部105gは、ロータリエンコーダ108bから受信したステージ駆動部108aが有するモータの回転情報に基づいて、各計測点が照射位置Gに位置することを検知する。本実施形態では、位置検出部105eは、1番目の計測点が照射位置Gに位置することを上記回転情報に基づいて検出し、該検出結果を界面位置取得部105fに通知する。2番目の計測点については、位置検出部105gは、上記回転情報に基づいて、1番目の計測点の検出(計測点が照射位置Gに位置することの検出)から上記所定の間隔dだけ透明部材101a、101bが移動した後に、界面位置取得部105fに2番目の計測点の検出を通知する。すなわち、位置検出部105gは、界面位置取得部105fへの、k番目の計測点の検出通知(計測点が照射位置Gに位置することを検出したことの通知)については、上記回転情報に基づいて、k−1番目の検出から所定の間隔dだけ透明部材101a、101bが移動する毎に行うように構成されている。従って、界面位置取得部105fは、各計測点が照射位置Gに位置することを知ることができる。
【0075】
接合予定線内の各地点における界面位置の測定が終わった後に、接合が開始される。接合の開始時に、1番目の計測点が再度照射位置Gに位置するように透明部材101a、101bがセットされる。このとき、接合用レーザ102の焦点が界面に合うよう、接合用レーザ102のレンズ102aの位置を基準レーザ位置H0に移動しておく。
【0076】
基準値取得部105iは、レーザ位置調整の基準とする基準値を取得する。そのために、計測開始時(1番目の計測点)のレンズ102aの位置を基準レーザ位置H0として、計測開始時(1番目の計測点)の界面位置Zを基準界面位置Z0として、記憶部120に予め格納しておく。
【0077】
レーザ位置算出部105hは、各地点について記憶部120に記憶された界面位置Zを読み出し、該界面位置Zと、基準値取得部105iにて取得された基準レーザ位置H0及び基準界面位置Z0とにより、以下の式(3)を用いて、該界面位置Zに対して適用すべきレーザ位置Hを算出する。
【0078】
H=H0+(Z−Z0) (3)
【0079】
このように算出したレーザ位置Hになるように、移動部115が接合用レーザ102のレンズ102aを移動させることによって、接合用レーザ102の焦点を界面に合わせることができる。なお、式(3)は式(1)とは形態が異なるが、第1の実施形態では発光間の距離を用いているのに対して、第2の実施形態では界面位置を用いている点が異なるだけであって、基準状態からの変位を相殺するように接合用レーザ102のレンズ102aの位置を移動させ、それによって接合用レーザ102の焦点を界面に合わせる点は同じである。
【0080】
接合時には、位置検出部105gは、透明部材101a、101bの計測点が照射位置Gに位置することを検出し、計測点が照射位置Gに位置することを移動部駆動制御部105jに通知する。具体的には、界面の測定時と同様に行うことができる。
【0081】
移動部駆動制御部105jは、透明部材101a、101bの、計測部103にて界面位置を計測した領域(計測点)について、該界面位置からレーザ位置算出部105hにて算出されたレーザ位置Hになるように、移動部115を作動させて接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。具体的には、移動部駆動制御部105jは、上記回転情報に基づいて2番目の計測点が照射位置Gに位置する前に、該2番目の計測点に対応する界面位置Zを記憶部120から読み出す。該読み出された界面位置Zに基づいてレーザ位置算出部105hによってレーザ位置Hを算出し、移動部駆動制御部105cは移動部115を作動させて、レンズ102aを該レーザ位置Hに移動させる。また、移動部駆動制御部105jには、位置検出部105gから計測点の序数通り(計測部103による計測の順番通り)に上記検出通知が送信されるので、移動部駆動制御部105jは、k−1(kは2以上の整数)番目の検出通知を受信してからk番目の計測点に対応する界面位置Zを記憶部120から読み出し、k番目の検出通知を受信する前に、移動部115を作動させてレンズ102aをレーザ位置算出部105hにて算出されたレーザ位置Hに移動させる。例えば、位置検出部105gより1番目の検出通知を受信すると、移動部駆動制御部105jは2番目の計測点に対応する界面位置Zを記憶部120から読み出し、2番目の検出通知を受信する前に、レーザ位置算出部105hにて該界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させる。また、2番目の検出通知を受信すると、3番目の計測点に対応する界面位置Zを記憶部120から読み出し、3番目の検出通知を受信する前に、レーザ位置算出部105hにて該界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させる。このように制御することにより、ある計測点にとっては、該計測点が照射位置Gに位置する時には、上記ある計測点に応じた界面位置Zから算出されたレーザ位置Hにレンズ102aを移動させておく、つまり接合用レーザ102の焦点を界面に合わせておくことができる。
【0082】
なお、図9においては、上側の透明部材101aの内部に焦点118aを合わせているが、下側の透明部材101bの内部に焦点118aを合わせてもよい。その場合には、反対点118bが上側の透明部材101aの内部に形成される点が異なるのみであり、上述の界面に焦点を合わせる方法は同様に適用できることは理解されたい。
【0083】
以下に本実施形態に係る接合動作の一例を説明する。
図12は、本実施形態に係る接合動作の各ステップにおけるレーザ光の照射位置を模式的に示す図である。最初に、ユーザは、透明部材101a、101bを重ね合わせて可動ステージ104上に載置する。このとき、開始地点P0が接合用レーザ102の光軸方向にある照射位置Gに位置するようにする(図12のa)。この状態で、接合用レーザ102の焦点が界面に合うように開始地点P0における焦点合わせ(初期調整と呼ぶ)を行う。
【0084】
例えば、初期調整を、接合用レーザ102の焦点及び反対点を観察することにより行うことができる。ユーザが初期調整の指示を入力操作部107から行うと、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を表示部106に表示させる。その際に、計測部103により撮影される像の中で観測される発光の位置の模式図を、図6(a)及び図6(b)に示す。図6(a)に示すように、接合用レーザ102の焦点112aが界面111に合っている場合には、焦点112aにおいて発生されるプラズマによってのみ発光が観測される。それに対して、図6(b)に示すように、接合用レーザ102の焦点112aが、界面111から接合用レーザ102の光軸方向にずれている場合には、焦点112aにおいて発生されるプラズマによる発光に加えて、焦点112aから界面111をはさんで反対側の地点112b(反対点112bと呼ぶ)においても発光が観測される。なお、焦点112aと反対点112bとは、界面に対して等しい距離Lに位置している。
【0085】
したがって、ユーザは表示部106を見て、焦点112a及び反対点112bに係る2つの発光が観測される場合には、発光が1つになるように(つまり、図6(b)の状態から図6(a)の状態になるように)、接合用レーザ102のレンズ102aの位置を光軸方向に沿って調整することによって、接合用レーザ102の焦点が界面に合うようにする。具体的には、ユーザが入力操作部107から、レンズ102aを上方向又は下方向へ所望の距離移動させる指示を出し、該指示に従って制御部105が移動部115を作動させてレンズ102aを光軸方向に沿って移動させる。ユーザが直接、レンズ102aの位置を調整しても構わない。本実施形態ではレンズ102aのみが移動されているが、接合用レーザ光源102bとレンズ102aとが一体化されて移動されるように構成されてもよい。
【0086】
なお、初期位置における焦点合わせの具体的な手法は、上述の手法に限らず、当技術分野で周知の手段を利用して焦点合わせを行ってもよい。
【0087】
初期位置での調整を行った後、ユーザは入力操作部107から制御部105に対して処理の開始指示を行う。開始指示を受けると、接合処理に先立って、各計測点における界面位置の測定処理が行われる。まず、測定開始時の接合用レーザ102のレンズ102aの位置Hを基準レーザ位置H0として記憶部120に記憶した後、レンズ102aを所定の距離Mの分、接合用レーザ102の光軸に沿った上方向に移動する。所定の距離Mは、透明部材101a、101bの各々の厚さよりも小さく、かつ接合用レーザ102の焦点における発光と反対点における発光とが十分に分離される程度の距離であることが望ましい。また、界面位置の測定時の接合用レーザ102からのレーザ出力は、透明部材101a、101bを融解せずにプラズマを発生させる程度の低出力であることが望ましい。次いで、制御部105は、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、接合用レーザ102を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。同時に、制御部105は、計測部103を制御して透明部材101a、101bの接合用レーザ102の焦点の周辺を含む領域を撮影させ、撮影された像を取得し、該像から界面位置Zを算出する。
【0088】
搬送開始時において照射位置Gに位置する透明部材101a、101bの領域(開始地点P0)が、1番目の計測点となり、該1番目の計測点における界面位置Zを算出し、記憶部120に記憶する。また、該1番目の計測点は、上述の初期調整によって接合用レーザ102の焦点が界面に合うように調整された開始地点P0であるから、該界面位置Zを基準界面位置Z0として、記憶部120に記憶する。次いで、制御部105の位置検出部105gが、2番目の計測点(地点P1)が照射位置Gに位置したこと(図12のb)を検出すると、制御部105の界面位置取得部105fは該2番目の計測点における界面位置Zを算出し、記憶部120に記憶する。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われ、各計測点と界面位置Zとが紐付けられて記憶部120に記憶される。その後、終了地点PNが照射位置Gに到達し(図12のc)、該終了地点PNにおける界面位置Zの測定がされた時点で、1つの接合予定線に沿った測定処理は終了となり、制御部105は、接合用レーザ102、移動部115及びステージ駆動部108aの動作を停止させる。
【0089】
界面位置の測定処理が終了すると、次いで接合処理が行われる。まず、制御部105は、ステージ駆動部108aを制御して、透明部材101a、101bの開始地点P0が接合用レーザ102の光軸方向にある照射位置Gに位置するように、透明部材101a、101bを搬送する(図12のd)。また、記憶部120から基準レーザ位置H0を読み出し、制御部105は、移動部115を制御して接合用レーザ102のレンズ102aを光軸に沿って該基準レーザ位置H0に移動させる。その後、制御部105は、ステージ駆動部108aを制御して透明部材101a、101bを矢印Aの方向に沿って搬送を開始する。この搬送開始と共に、制御部105は、接合用レーザ102を駆動し、透明部材101a、101bに対してレーザ光の照射を開始させる。接合時の接合用レーザ102からのレーザ出力は、透明部材101a、101bを融解して接合させることが可能な出力にする。
【0090】
接合用レーザ102からのレーザ光の連続照射により行われる接合と並行して、接合予定線に含まれる各地点に関して、記憶部120から読み出される界面位置Z、基準界面位置Z0、及び基準レーザ位置H0から式(3)によって算出されるレーザ位置Hに基づいて、接合用レーザ102の焦点位置の調整が行われる。2番目の計測点(地点P1)は、透明部材101a、101bにおいて、1番目の計測点から所定の間隔dだけ離間した位置である。制御部105は、該2番目の計測点が照射位置Gに到達する前に、記憶部120から2番目の計測点における界面位置Zを取得する。制御部105のレーザ位置算出部105hは、2番目の計測点における界面位置Z、基準界面位置Z0及び基準レーザ位置H0に基づいて、該2番目の計測点におけるレーザ位置Hを算出する。制御部105の移動部駆動制御部105jは、位置検出部105gから、2番目の検出通知を受信する前に、上記算出されたレーザ位置Hになるように、移動部115を制御して接合用レーザ102のレンズ102aを光軸方向に沿って移動させる。その結果、2番目の計測点が照射位置Gに到達すると、接合用レーザ102の焦点が界面に合っている状態で接合がおこなわれる(図12のe)。3番目以降の計測点についても、上記2番目の計測点における処理と同様の処理が行われる。
【0091】
その後、終了地点PNが照射位置Gに到達し(図12のf)、該終了地点PNの接合がされた時点で、1つの接合予定線に沿った接合処理は終了となり、制御部105は、接合用レーザ102、移動部115及びステージ駆動部108aの動作を停止させる。
【0092】
(第2の実施例)
本実施形態に係る実施例として、接合用レーザ102から透明部材101a、101bの内部に焦点を合わせてレーザ光を照射し、該透明部材の端面から発光の観測を行った。透明部材101a、101bには、それぞれ1mm厚の青板ガラスを用いた。接合用レーザ102にはフェムト秒ファイバレーザを用い、パルス幅500fs、繰り返し周波数100kHz、平均強度400mW、波長1.04μmとした。接合用レーザのレンズ102aにはNA=0.4のものを用いた。また、雰囲気は大気とした。界面位置の測定時の接合用レーザ102の平均強度は、透明部材を融解しない程度の低出力、例えば100mWにするとより望ましい。
【0093】
この条件でレーザ光の照射を行った際に、計測部103により撮影された像を図13(a)及び図13(b)に示す。各図中の線Zは透明部材101a、101bの界面の位置(不可視)を表すために引いた線である。図13(a)は、基準状態の像である。この像から、線Zより上に接合用レーザ102の焦点112aにおける発光が観察され、線Zより下に接合用レーザ102の反対点112bにおける発光が観察されていることがわかる。なお、この状態では、接合用レーザ102の焦点112aは、接合用レーザ102の光軸方向に沿って界面より上側の50μmの地点に合わせられている。図13(b)は、接合用レーザ102の焦点112aの位置が、基準状態より接合用レーザ102の光軸方向に沿って上側に50μmずれている状態(つまり、焦点112aは界面より100μm上側にある状態)の像である。これらの像から、例えば上述の発光強度分布を取得して、焦点112aにおける光の位置と、反対点112bの位置とを特定することによって、特定の計測点における界面位置を算出することができる。その後、該計測点が接合される時に、該界面位置に焦点が合うように接合用レーザ102の位置を調整することができる。
【0094】
なお、本実施例においては、意図的にレーザ光焦点の基準状態からのずれを生じさせるために、接合用レーザ102のレンズ102aの位置を、図中の上方向、つまり接合用レーザ102の光軸方向に沿って透明部材101a、101bから遠ざかる方向に50μm移動させた。これにより、接合用レーザ102の焦点112aの位置に、接合用レーザ102の光軸方向に沿って基準状態より図中の上方向に50μmのずれが生じた。
なお、本実施例と異なり、焦点位置のずれが透明部材101a、101bの厚さが変わることにより生じたとしても、撮影される像は本実施例の場合と本質的に変わらないことを理解されたい。
【0095】
本実施形態では接合用レーザのみで界面位置の測定と接合との両方を行っているが、モニタ用レーザを別に設け、モニタ用レーザによって各計測点における界面位置の計測及び記憶を行った後に、記憶された界面位置を読み出して接合用レーザの位置を補正して接合を行うように構成しても構わない。その場合には装置構成としては第1の実施形態と同一となる。
【0096】
上述の第1の実施形態及び第2の実施形態は、両方とも焦点と反対点とが界面を挟んで等距離に観測できるという事実を利用してレーザ光焦点の界面からのずれを測定している。すなわち、第1の実施形態では焦点と反対点との間の距離の変化を用いており、第2の実施形態では焦点と反対点との間の中点の位置(つまり界面位置)の変化を用いているが、これらは実質的には同じことである。したがって、レーザ光焦点の界面からのずれを測定するために、第1の実施形態の装置構成において焦点と反対点との間の中点の位置の変化を用いてもよいし、第2の実施形態の装置構成においてで焦点と反対点との間の距離の変化を用いてもよい。
【符号の説明】
【0097】
100、200 レーザ照射装置
101a、101b 透明部材
102 接合用レーザ
102a 接合用レーザのレンズ
102b 接合用レーザ光源
103 計測部
104 可動ステージ
105 制御部
105a 発光間距離取得部
105b 変位算出部
105c、105j 移動部駆動制御部
105d 基準値取得部
105e、105g 位置検出部
105f 界面位置取得部
105h レーザ位置算出部
105i 位置検出部
106 表示部
107 入力操作部
108a ステージ駆動部
108b ロータリエンコーダ
110、117 レーザ光
111 界面
112a、118a 焦点
112b、118b 反対点
114 モニタ用レーザ
114a モニタ用レーザのレンズ
114b モニタ用レーザ光源
115 移動部
119a、119b、119c、119d、119e、119f ピーク
120 記憶部
A 搬送方向
B 移動方向
C 測定位置
D 接合位置
E 開始地点
F 終了地点
G 照射位置
Z 界面位置
【特許請求の範囲】
【請求項1】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、
重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光を出射する第1のレーザ光源と、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第2のレーザ光を出射する第2のレーザ光源と、
前記第1のレーザ光を、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光する第1の集光レンズと、
前記第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する第2の集光レンズと、
前記第2の集光レンズを移動させる移動手段と、
少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、
前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御する制御手段と、
を備えることを特徴とするレーザ照射装置。
【請求項2】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、
重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光及び第2のレーザ光を切り替えて出射するレーザ光源と、
前記第1及び第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する集光レンズと、
前記集光レンズを移動させる移動手段と、
少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、
前記移動手段を制御する制御手段と、
を備え、
前記変位を取得する時には、前記レーザ光源が前記第1のレーザ光を出射し、前記集光レンズが前記第1のレーザ光を前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光するように作動し、
前記界面の接合を行う時には、前記レーザ光源が前記第2のレーザ光を出射し、前記集光レンズが前記第2のレーザ光を前記第1及び第2の透明部材の内部に焦点を合わせるように集光し、前記制御手段が前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御するように作動する
ことを特徴とするレーザ照射装置。
【請求項3】
前記計測手段は、前記第1及び第2の透明部材の内部に発生されている発光の一次元又は二次元の分布を計測することを特徴とする、請求項1又は2に記載のレーザ照射装置。
【請求項4】
前記変位取得手段が、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ照射光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の距離を取得する手段と、
前記取得される距離の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出する手段と、
を備える、請求項1又は2に記載のレーザ照射装置。
【請求項5】
前記変位取得手段が、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の中点を界面位置として取得する手段と、
前記取得される界面位置の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出する手段と、
を備える、請求項1又は2に記載のレーザ照射装置。
【請求項6】
前記ステージが、該ステージ上に載置されている前記第1及び第2の透明部材を所定の方向に搬送するように構成され、
前記計測手段が、前記所定の方向に搬送されている前記第1及び第2の透明部材内で前記第1のレーザ光が照射されている領域に対して、所定の間隔毎に前記発光を複数回計測するように構成され、
前記変位取得手段が、前記所定の間隔毎に計測された前記発光及び前記発光から取得される情報の少なくとも一方から、前記発光が計測された領域毎に対応する前記変位を算出するように構成され、
前記制御手段が、1番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記第2の集光レンズの位置が前記1番目の前記発光が計測された領域に対応する前記変位を相殺するように前記移動手段を制御し、k−1(kは、2以上の整数)番目の前記発光が計測された領域に対する前記第2のレーザ光の照射が終了し、かつk番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記第2の集光レンズの位置が前記k番目の前記発光が計測された領域に対応する前記変位を相殺するように前記移動手段を制御するように構成されている
ことを特徴とする、請求項1に記載のレーザ照射装置。
【請求項7】
前記ステージ上に載置されている前記第1及び第2の透明部材の各領域に対応する前記変位を記憶する記憶手段をさらに備え、
前記制御手段が、前記発光が計測された領域の各々に対して、前記第2のレーザ光の照射が行われる前に、前記記憶手段から前記発光が計測された領域の各々に対応する前記変位を読み出し、前記第2の集光レンズの位置が前記読み出された変位を相殺するように前記移動部を移動させるように構成されている
ことを特徴とする、請求項1又は2に記載のレーザ照射装置。
【請求項8】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射方法であって、
重ね合された前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせて第1のレーザ光を照射することと、
前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部に焦点を合わせて第2のレーザ光を照射することと、
少なくとも前記第1のレーザ光が照射されている間に、前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測することと、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得することと、
前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させることと、
を備えることを特徴とするレーザ照射方法。
【請求項9】
前記計測することでは、前記第1及び第2の透明部材の内部に発生されている発光の一次元又は二次元の分布を計測する
ことを特徴とする、請求項8に記載のレーザ照射方法。
【請求項10】
前記変位を取得することが、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の距離を取得することと、
前記取得される距離の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出することと、
を備える、請求項8に記載のレーザ照射方法。
【請求項11】
前記変位を取得することが、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の中点を界面位置として取得することと、
前記取得される界面位置の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出することと、
を備える、請求項8に記載のレーザ照射方法。
【請求項12】
前記計測することが、所定の方向に搬送されている前記第1及び第2の透明部材内で前記第1のレーザ光が照射されている領域に対して、所定の間隔毎に前記発光を複数回計測するように適合され、
前記変位を取得することが、前記所定の間隔毎に計測された前記発光及び前記発光から取得される情報の少なくとも一方から、前記発光が計測された領域毎に対応する前記変位を算出するように適合され、
前記移動させることが、1番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記1番目の前記発光が計測された領域に対応する前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させ、k−1(kは、2以上の整数)番目の前記発光が計測された領域に対する前記第2のレーザ光の照射が終了し、かつk番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記k番目の前記発光が計測された領域に対応する前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させるように適合されている
ことを特徴とする、請求項8に記載のレーザ照射方法。
【請求項13】
前記第1及び第2の透明部材の各領域に対応する前記変位を記憶することをさらに備え、
前記移動させることが、前記発光が計測された領域の各々に対して、前記第2のレーザ光の照射が行われる前に、前記発光が計測された領域の各々に対応する前記記憶された変位を読み出し、前記読み出された変位を相殺するように前記第2のレーザ光の焦点の位置を移動させるように適合されている
ことを特徴とする、請求項8に記載のレーザ照射方法。
【請求項1】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、
重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光を出射する第1のレーザ光源と、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第2のレーザ光を出射する第2のレーザ光源と、
前記第1のレーザ光を、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光する第1の集光レンズと、
前記第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する第2の集光レンズと、
前記第2の集光レンズを移動させる移動手段と、
少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、
前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御する制御手段と、
を備えることを特徴とするレーザ照射装置。
【請求項2】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射装置であって、
重ね合わされた前記第1及び第2の透明部材を載置可能なステージと、
前記ステージ上に載置されている前記第1及び第2の透明部材の前記界面の法線方向から、第1のレーザ光及び第2のレーザ光を切り替えて出射するレーザ光源と、
前記第1及び第2のレーザ光を、前記第1及び第2の透明部材の内部に焦点を合わせるように集光する集光レンズと、
前記集光レンズを移動させる移動手段と、
少なくとも前記第1のレーザ光が照射されている間に、前記ステージ上に載置されている前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測する計測手段と、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得する変位取得手段と、
前記移動手段を制御する制御手段と、
を備え、
前記変位を取得する時には、前記レーザ光源が前記第1のレーザ光を出射し、前記集光レンズが前記第1のレーザ光を前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせるように集光するように作動し、
前記界面の接合を行う時には、前記レーザ光源が前記第2のレーザ光を出射し、前記集光レンズが前記第2のレーザ光を前記第1及び第2の透明部材の内部に焦点を合わせるように集光し、前記制御手段が前記第2のレーザ光の焦点の位置を移動させて前記変位を相殺するように前記移動手段を制御するように作動する
ことを特徴とするレーザ照射装置。
【請求項3】
前記計測手段は、前記第1及び第2の透明部材の内部に発生されている発光の一次元又は二次元の分布を計測することを特徴とする、請求項1又は2に記載のレーザ照射装置。
【請求項4】
前記変位取得手段が、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ照射光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の距離を取得する手段と、
前記取得される距離の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出する手段と、
を備える、請求項1又は2に記載のレーザ照射装置。
【請求項5】
前記変位取得手段が、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の中点を界面位置として取得する手段と、
前記取得される界面位置の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出する手段と、
を備える、請求項1又は2に記載のレーザ照射装置。
【請求項6】
前記ステージが、該ステージ上に載置されている前記第1及び第2の透明部材を所定の方向に搬送するように構成され、
前記計測手段が、前記所定の方向に搬送されている前記第1及び第2の透明部材内で前記第1のレーザ光が照射されている領域に対して、所定の間隔毎に前記発光を複数回計測するように構成され、
前記変位取得手段が、前記所定の間隔毎に計測された前記発光及び前記発光から取得される情報の少なくとも一方から、前記発光が計測された領域毎に対応する前記変位を算出するように構成され、
前記制御手段が、1番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記第2の集光レンズの位置が前記1番目の前記発光が計測された領域に対応する前記変位を相殺するように前記移動手段を制御し、k−1(kは、2以上の整数)番目の前記発光が計測された領域に対する前記第2のレーザ光の照射が終了し、かつk番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記第2の集光レンズの位置が前記k番目の前記発光が計測された領域に対応する前記変位を相殺するように前記移動手段を制御するように構成されている
ことを特徴とする、請求項1に記載のレーザ照射装置。
【請求項7】
前記ステージ上に載置されている前記第1及び第2の透明部材の各領域に対応する前記変位を記憶する記憶手段をさらに備え、
前記制御手段が、前記発光が計測された領域の各々に対して、前記第2のレーザ光の照射が行われる前に、前記記憶手段から前記発光が計測された領域の各々に対応する前記変位を読み出し、前記第2の集光レンズの位置が前記読み出された変位を相殺するように前記移動部を移動させるように構成されている
ことを特徴とする、請求項1又は2に記載のレーザ照射装置。
【請求項8】
少なくとも可視光に対して透明な第1の透明部材と第2の透明部材との界面に、前記第1及び第2の透明部材を透過するレーザ光を照射する際に、前記レーザ光の焦点を前記界面に合わせることが可能なレーザ照射方法であって、
重ね合された前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部で前記界面から離れた地点に焦点を合わせて第1のレーザ光を照射することと、
前記第1及び第2の透明部材の前記界面の法線方向から、前記第1及び第2の透明部材の内部に焦点を合わせて第2のレーザ光を照射することと、
少なくとも前記第1のレーザ光が照射されている間に、前記第1及び第2の透明部材の端面側から、前記第1及び第2の透明部材の内部に発生されている発光を計測することと、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第2のレーザ光の焦点の前記界面からの変位を取得することと、
前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させることと、
を備えることを特徴とするレーザ照射方法。
【請求項9】
前記計測することでは、前記第1及び第2の透明部材の内部に発生されている発光の一次元又は二次元の分布を計測する
ことを特徴とする、請求項8に記載のレーザ照射方法。
【請求項10】
前記変位を取得することが、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の距離を取得することと、
前記取得される距離の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出することと、
を備える、請求項8に記載のレーザ照射方法。
【請求項11】
前記変位を取得することが、
前記発光及び前記発光から取得される情報の少なくとも一方から、前記第1及び第2の透明部材の内部における、前記第1のレーザ光の焦点における発光と、前記第1のレーザ光の焦点から前記界面を挟んで等距離に位置する反対点における発光との間の中点を界面位置として取得することと、
前記取得される界面位置の、前記第2のレーザ光の焦点が前記界面に合っている基準状態における値からの差分を、前記変位として算出することと、
を備える、請求項8に記載のレーザ照射方法。
【請求項12】
前記計測することが、所定の方向に搬送されている前記第1及び第2の透明部材内で前記第1のレーザ光が照射されている領域に対して、所定の間隔毎に前記発光を複数回計測するように適合され、
前記変位を取得することが、前記所定の間隔毎に計測された前記発光及び前記発光から取得される情報の少なくとも一方から、前記発光が計測された領域毎に対応する前記変位を算出するように適合され、
前記移動させることが、1番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記1番目の前記発光が計測された領域に対応する前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させ、k−1(kは、2以上の整数)番目の前記発光が計測された領域に対する前記第2のレーザ光の照射が終了し、かつk番目の前記発光が計測された領域に対して前記第2のレーザ光の照射を行う前に、前記k番目の前記発光が計測された領域に対応する前記変位を相殺するように前記第2のレーザ光の焦点の位置を移動させるように適合されている
ことを特徴とする、請求項8に記載のレーザ照射方法。
【請求項13】
前記第1及び第2の透明部材の各領域に対応する前記変位を記憶することをさらに備え、
前記移動させることが、前記発光が計測された領域の各々に対して、前記第2のレーザ光の照射が行われる前に、前記発光が計測された領域の各々に対応する前記記憶された変位を読み出し、前記読み出された変位を相殺するように前記第2のレーザ光の焦点の位置を移動させるように適合されている
ことを特徴とする、請求項8に記載のレーザ照射方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図11】
【図12】
【図7】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図10】
【図11】
【図12】
【図7】
【図13】
【公開番号】特開2013−111626(P2013−111626A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261118(P2011−261118)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]