
レーザ光照射システム
【課題】搬送物に所定パワー以上のレーザ光が照射されることを防止できるレーザ光照射システムを提供する。
【解決手段】 システム制御装置は、コンテナCを検出位置に搬送し、センサ12によりリライタブルラベルRLが検出されない場合には、画像消去装置14及び画像記録装置16から所定パワー以上のレーザ光を射出させない。
【解決手段】 システム制御装置は、コンテナCを検出位置に搬送し、センサ12によりリライタブルラベルRLが検出されない場合には、画像消去装置14及び画像記録装置16から所定パワー以上のレーザ光を射出させない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーザ光照射システムに係り、更に詳しくは、搬送物に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムに関する。
【背景技術】
【0002】
従来、例えばコンベア(搬送手段)により搬送可能な搬送物の一側の面に貼付されているリライタブルラベル(熱可逆記録媒体)にレーザ光を照射して、画像の消去及び記録の少なくとも一方を行うシステムが知られている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、例えばコンベア上における搬送物の向きなどによっては、所定パワー以上のレーザ光(例えば画像の消去又は記録に必要なパワーのレーザ光)が搬送物に照射され、搬送物に損傷を与えるおそれがあった。
【課題を解決するための手段】
【0004】
本発明は、搬送物の一側の面に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムであって、前記搬送物を所定の搬送方向に搬送する搬送路を含む搬送手段と、前記搬送路上における特定位置に搬送された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出する検出手段と、前記搬送路上における前記特定位置の前記搬送方向下流側の少なくとも1つの所定位置に搬送された前記搬送物の前記一側の面に向けてレーザ光を射出可能なレーザ光射出手段と、前記搬送手段及び前記レーザ光射出手段を制御する制御手段とを備え、前記制御手段は、前記搬送物を前記特定位置に搬送し、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記レーザ光射出手段から所定パワー以上のレーザ光を射出させないレーザ光照射システムである。ここで、「所定パワー以上のレーザ光を射出させない」とは、所定パワー未満のレーザ光を射出させること及びレーザ光を射出させないことを含む意味である。
【発明の効果】
【0005】
本発明によれば、搬送物に所定パワー以上のレーザ光が照射されることを防止できる。
【図面の簡単な説明】
【0006】
【図1】本発明の第1の実施形態に係るレーザ光照射システムの概略構成を示す図である。
【図2】レーザ光照射システムが備える画像消去装置を説明するための図である。
【図3】レーザ光照射システムが備える画像記録装置を説明するための図である。
【図4】レーザ光照射システムの制御の構成を示すブロック図である。
【図5】図5(A)は、レーザ光照射システムによる画像書き換えの対称物であるリライタブルラベルの発色−消色特性を示すグラフであり、図5(B)は、リライタブルラベルの発色−消色変化のメカニズムを表す図である。
【図6】図6(A)〜図6(F)は、レーザ光照射システムの動作を説明するための図(その1〜その6)である。
【図7】図7(A)及び図7(B)は、コンテナにレーザ光が照射されたときの被害状況を説明するための図である。
【図8】図8(A)〜図8(F)は、第2の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その6)である。
【図9】第2の実施形態に係るレーザ光照射システムが有するローラコンベアにおける分岐コンベアとの接続部分を説明するための図である。
【図10】図10(A)〜図10(G)は、第3の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その7)である。
【図11】図11(A)〜図11(G)は、第4の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その7)である。
【図12】図12(A)〜図12(H)は、第5の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その8)である。
【図13】第5の実施形態に係るレーザ光照射システムが有する回転機構を説明するための図である。
【図14】図14(A)〜図14(H)は、第5の実施形態に係るレーザ光照射システムの動作を説明するための図(その9〜その16)である。
【図15】図15(A)〜図15(C)は、搬送物としてのコンテナに貼付されているリライタブルラベルを検出する方法の具体例(その1〜その3)を説明するための図である。
【発明を実施するための形態】
【0007】
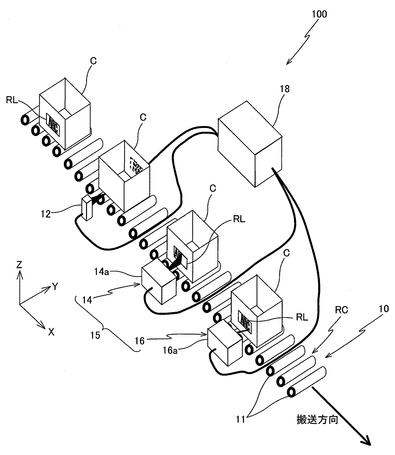
以下、本発明の第1の実施形態を図1〜図6(F)に基づいて説明する。図1には、第1の実施形態に係るレーザ光照射システムとしてのレーザ光照射システム100の概略構成が示されている。本実施形態では、一例として、図1に示されるようなZ軸方向を鉛直方向とするXYZ三次元直交座標系が設定されている。
【0008】
レーザ光照射システム100は、以下に詳述するように、搬送物の一例としての輸送用のコンテナCに貼付されたリライタブルラベルRLにレーザ光を照射して、画像の書き換えを行う。
【0009】
ここで、「画像」とは、コンテナCに収容される荷物の内容、輸送先の情報、リライタブルラベルRLの使用回数などのリライタブルラベルRLに記録される視認可能な情報を意味する。
【0010】
ここで、コンテナCは、一例として、直方体形状の段ボール箱である。リライタブルラベルRLは、加熱、冷却のプロセスの違いにより発色又は消色する熱可逆記録媒体であり、レーザ光を吸収し発熱する光熱変換材を含んでいる。
【0011】
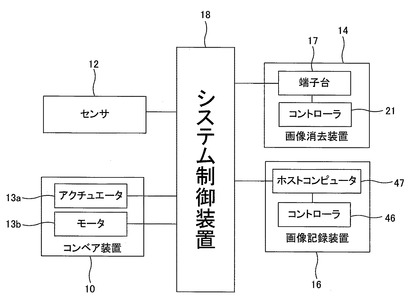
レーザ光照射システム100は、図1に示されるように、搬送手段としてのコンベア装置10、検出手段としてのセンサ12、レーザ光射出手段15、及び制御手段としてのシステム制御装置18(図4参照)を含む。
【0012】
コンベア装置10は、一例として、X軸方向に所定間隔で並べて配置されたY軸方向を軸線方向とする複数のローラ11と、該複数のローラ11の下方に設置された平ベルト装置(不図示)とを有している。複数のローラ11は、それぞれY軸周りに回転可能な状態で不図示の支持架台に支持されている。以下、便宜上、複数のローラ11を合わせてローラコンベアRC(搬送路)とも称する。なお、図1では、図示の制約上、ローラコンベアRCのX軸方向中央部のみが図示されている。
【0013】
ローラコンベアRCを構成する複数のローラ11は、一例として、実質的に同じものであり、それぞれの最上面部(外周面における最も+Z側に位置する部分)が概ね同一水平面上に位置している。
【0014】
上記平ベルト装置は、図示は省略されているが、一例として、ローラコンベアRCの最も+X側及び最も−X側のローラ11の下方にそれぞれY軸周りに回転可能に配置された一対のプーリと、該一対のプーリに巻き掛けられた平ベルトと、該平ベルトをローラコンベアRCを構成する複数のローラ11に当接させる当接位置と該当接位置から離間する離間位置との間で上下動させる例えばエアシリンダ等のアクチュエータ13aを含む昇降装置と、一対のプーリのうちの一方をY軸周りに回転駆動するモータ13bとを有している。アクチュエータ13a及びモータ13bは、システム制御装置18により制御される(図4参照)。
【0015】
コンベア装置10は、システム制御装置18の指示の下、モータ13bを駆動して平ベルトを循環駆動させるとともに、アクチュエータ13aを駆動して平ベルトを当接位置に位置させることで、ローラコンベアRCを構成する複数のローラ11を同期して回転させ、この状態から、平ベルトを離間位置に位置させることで、ローラコンベアRCを構成する複数のローラ11の回転を停止させる。
【0016】
そして、ローラコンベアRC上にコンテナCが載置されているときに、上述のようにして複数のローラ11が回転(ローラコンベアRCが駆動)されると、コンテナCは、複数のローラ11との間で作用する摩擦力により、複数のローラ11間で受け渡されながら、+X方向に搬送され、上述のようにして複数のローラ11の回転(ローラコンベアRCの駆動)が停止されると、コンテナCの搬送が停止される。
【0017】
センサ12は、一例として、発光部及び受光部を有する反射型光電センサである。センサ12は、その発光部及び受光部が+Y側を向いた状態でローラコンベアよりも例えば数cm〜数十cm高い位置に位置した状態で、ローラコンベアRCの−Y側に配置されている。
【0018】
センサ12は、その+Y側(ローラコンベアRC上における対向する位置)に位置したコンテナCの−Y側の側面に向けて発光部から光を射出してその反射光を受光部で受光することにより、コンテナCの−Y側の側面の反射率に関する情報を検出する。ここで、「コンテナCの−Y側の側面」とは、コンテナCにおけるY軸方向に対向する一対の側面のうち、−Y側に位置する側面を意味する。
【0019】
ところで、コンテナC(段ボール箱)の側面は、表面が粗く、光の反射率が低い。これに対し、リライタブルラベルRLの表面は、フィルムで覆われており、平滑なため、光の反射率が高い。従って、センサ12は、コンテナCの−Y側の側面におけるリライタブルラベルRLの有無を検出できる。センサ12は、その検出結果、すなわち検出信号又は非検出信号をシステム制御装置18に出力する。
【0020】
なお、検出信号は、センサ12がリライタブルラベルRLを検出したときに出力する信号である。一方、非検出信号は、センサ12がコンテナCのみを検出したとき、すなわちリライタブルラベルRLを検出しなかったときに出力する信号である。
【0021】
レーザ光射出手段15は、一例として、画像消去装置14及び画像記録装置16を有している。
【0022】
画像消去装置14は、一例として、ローラコンベアRCの−Y側であって、センサ12の+X側に配置されている。
【0023】
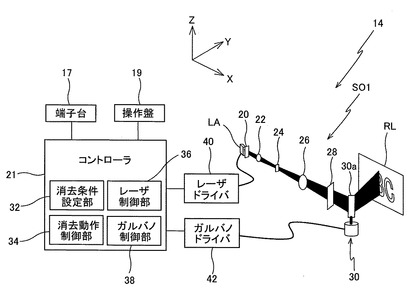
画像消去装置14は、図2に示されるように、1次元配列された複数のレーザダイオード(半導体レーザ)を含む1次元レーザアレイLAと、光学系SO1、端子台17、操作盤19、コントローラ21、筐体14a(図1参照)などを含む。なお、図示は省略されているが、1次元レーザアレイLA、光学系SO1、端子台17、コントローラ21は、筐体14a内に収容されており、操作盤19は、筐体14aの例えば側面(又は上面)に設けられている。
【0024】
1次元レーザアレイLAは、一例として、Z軸方向に並べて配置(1次元配列)された図示しない複数(例えば17個)のレーザダイオードを有する。ここでは、最も+Z側のレーザダイオードと最も−Z側のレーザダイオードとのZ軸方向に関する距離は、例えば10mmに設定されている。1次元レーザアレイLAは、一例として、断面がライン状のレーザ光を+X方向に射出する。
【0025】
光学系SO1は、一例として、第1のシリンドリカルレンズ20、第1の球面レンズ22、マイクロレンズアレイ24、第2の球面レンズ26、第2のシリンドリカルレンズ28、ガルバノミラー装置30を有する。以下、便宜上、第1のシリンドリカルレンズ20、第1の球面レンズ22、マイクロレンズアレイ24、第2の球面レンズ26及び第2のシリンドリカルレンズ28を合わせて、レンズ群と称する。
【0026】
第1のシリンドリカルレンズ20は、1次元レーザアレイLAから射出されたライン状のレーザ光の光路上に配置されており、該レーザ光を幅方向(複数のレーザダイオードの配列方向に直交する方向に平行な方向)に僅かに集光する。ここでは、第1のシリンドリカルレンズ20として小型のものが、1次元レーザアレイLAの射出面に近接して配置されている。
【0027】
第1の球面レンズ22は、第1のシリンドリカルレンズ20を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、マイクロレンズアレイ24に集光する。
【0028】
マイクロレンズアレイ24は、第1の球面レンズ22を介したライン状のレーザ光の光路上に配置されており、該レーザ光を長さ方向(複数のレーザダイオードの配列方向に平行な方向)に拡散して、長さ方向の光分布を均一化する。
【0029】
第2の球面レンズ26は、マイクロレンズアレイ24を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、長さ方向及び幅方向に均一に拡大する。
【0030】
第2のシリンドリカルレンズ28は、第2の球面レンズ26を介したライン状のレーザ光の光路上に配置されており、該レーザ光を幅方向に僅かに集光する。
【0031】
ガルバノミラー装置30は、ガルバノメータに、レーザ光を反射する往復揺動可能な揺動ミラー30aが装着されたものである。ここでは、揺動ミラー30aは、一例として、Z軸周りに揺動可能となっている。ガルバノミラー装置30は、その揺動ミラー30aの回転角度を検出する角度センサ(不図示)を有している。
【0032】
ガルバノミラー装置30は、その揺動ミラー30aが第2のシリンドリカルレンズ28を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、Z軸周りに揺動しながら反射してその反射方向を変えて、概ね+Y側に偏向する。
【0033】
レンズ群を介したライン状のレーザ光は、ガルバノミラー装置30により偏向され、筐体14aの+Y側の側壁に設けられた消去用レーザ光射出口(不図示)を介して概ね+Y側に、すなわちローラコンベアRCの例えば数cm〜数十cm上空を横切るように射出される。
【0034】
以上より、1次元レーザアレイLAから射出されたライン状のレーザ光は、レンズ群によりエネルギー密度が均質化され、かつ長さ方向(Z軸方向)に拡大され、ガルバノミラー装置30により概ね+Y側に偏向され、ローラコンベアRC上における上記消去用レーザ光射出口に対向する位置に位置する物体に照射される。この結果、物体上でライン状のレーザ光がX軸方向に走査される。
【0035】
端子台17は、システム制御装置18から出力される消去開始信号、インターロック信号、環境温度信号、エンコーダ信号などを入力するための信号入力端子と、消去準備完了信号、消去中信号、異常発生信号などをシステム制御装置18に出力するための信号出力端子とを有している。
【0036】
ここで、消去開始信号は、画像消去装置14が消去動作を開始するための信号である。インターロック信号は、消去動作を緊急停止させるための信号である。環境温度信号は、環境温度でレーザパワー(出力)を補正するための信号である。エンコーダ信号は、リライタブルラベルRL(ワーク)の移動速度を検出するための信号である。消去準備完了信号は、消去開始信号を受付可能になったことを示す信号である。消去中信号は、消去を実行していることを示す信号である。異常発生信号は、例えば1次元レーザアレイLAの異常、ガルバノミラー装置30の異常などをコントローラ21が検出したことを示す信号である。
【0037】
操作盤19は、簡易な表示器及び操作スイッチを含むユーザインターフェースであり、メニュー選択と数値入力が可能となっている。ここでは、操作盤19では、一例として、レーザ光の走査長、レーザ光の走査速度、レーザ光の走査方向、レーザパワー、消去開始ディレイ時間、ワーク速度などの消去条件などを指定可能となっている。
【0038】
コントローラ21は、消去条件設定部32、消去動作制御部34、レーザ制御部36、ガルバノ制御部38などを有する。
【0039】
消去条件設定部32は、操作盤19にてユーザが指定したレーザ光の走査長、レーザ光の走査速度、レーザ光の走査方向、レーザパワー、消去開始ディレイ時間、ワーク速度などの消去条件を設定する。
【0040】
消去動作制御部34は、端子台17からの入力信号を処理し、レーザ制御部36及びガルバノ制御部38へ指示を出すとともに、端子台17への出力信号を生成する。
【0041】
レーザ制御部36は、消去動作制御部34が指示したレーザの出力値をアナログ電圧に変換してレーザドライバ40へ出力するとともに、レーザを点灯又は消灯させるためのタイミング信号を生成する。
【0042】
レーザドライバ40は、1次元レーザアレイLAの駆動電流を生成する回路であり、レーザ制御部36からの指示値に従ってレーザパワーを制御する。
【0043】
ガルバノ制御部38は、消去動作制御部34が指示した走査開始位置から走査終了位置まで指定速度でガルバノミラー装置30の揺動ミラー30aを揺動させるためのアナログ信号を生成してガルバノドライバ42に出力する。
【0044】
ガルバノドライバ42は、ガルバノ制御部38からの指示値に従ってガルバノミラー装置30の揺動ミラー30aの揺動角度を制御する回路であり、ガルバノミラー装置30が有する角度センサからの信号とガルバノ制御部38からの指示値を比較し、その誤差が最小になるようにガルバノミラー装置30へ駆動信号を出力する。
【0045】
図1に戻り、画像記録装置16は、一例として、ローラコンベアの−Y側であって、画像消去装置14の+X側に配置されている。
【0046】
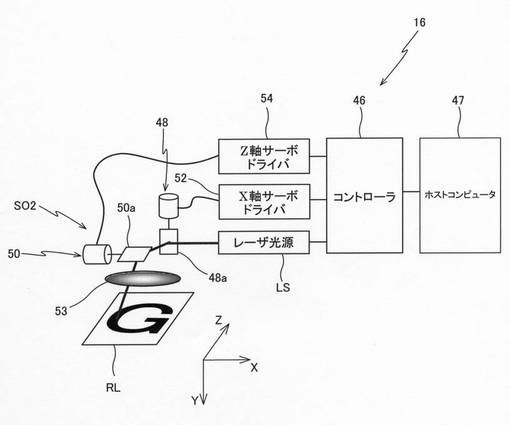
画像記録装置16は、図3に示されるように、一例として、少なくとも1つ(例えば3つ)のレーザダイオード(半導体レーザ)を含むレーザ光源LS、光学系SO2、コントローラ46、ホストコンピュータ47、これらを収容する筐体16a(図1参照)などを含む。
【0047】
レーザ光源LSは、一例として、レーザ光を−X方向に射出する。
【0048】
光学系SO2は、一例として、X軸ガルバノミラー装置48、Z軸ガルバノミラー装置50及びfθレンズ53を有している。
【0049】
X軸ガルバノミラー装置48は、その揺動ミラー48aがY軸周りに揺動する点を除いて、前述したガルバノミラー装置30と同様の構成を有している。
【0050】
X軸ガルバノミラー装置48は、一例として、その揺動ミラー48aがレーザ光源LSから射出されたレーザ光の光路上に配置されており、該レーザ光を概ね−Z側に偏向する。
【0051】
Z軸ガルバノミラー装置50は、その揺動ミラー50aがX軸周りに揺動する点を除いて、前述したガルバノミラー装置30と同様の構成を有している。
【0052】
Z軸ガルバノミラー装置50は、一例として、その揺動ミラー50aがX軸ガルバノミラー装置48により偏向されたレーザ光の光路上に配置されており、該レーザ光を概ね+Y側に偏向する。
【0053】
fθレンズ53は、一例として、Z軸ガルバノミラー装置50により偏向されたレーザ光の光路上に配置されており、該レーザ光をその+Y側に位置する物体上に集光するとともに、X軸及びZ軸ガルバノミラー装置48、50の揺動ミラーの揺動位置と物体上に形成される光スポットの変位が比例するような補正を行う。
【0054】
fθレンズ53を介したレーザ光は、筐体16aの+Y側の側壁に設けられた記録用レーザ光射出口(不図示)を介して概ね+Y側に、すなわちローラコンベアRCの例えば数cm〜数十cm上空を横切るように射出される。
【0055】
以上より、レーザ光源LSから射出された光は、X軸及びZ軸ガルバノミラー装置48、50により順次偏向され、fθレンズ53を介してローラコンベアRC上における記録用レーザ光射出口に対向する位置に位置する物体に照射される。この結果、物体上で光スポットがX軸及びZ軸の2次元方向に走査される。
【0056】
コントローラ46は、ホストコンピュータ47から出力された画像情報に基づいて、線分で形成される描画データを生成し、X軸及びZ軸ガルバノミラー装置48、50における揺動ミラーの揺動位置、レーザダイオードの発光タイミング、発光パワーを制御し、記録対象物に画像を記録(形成)する。ここでは、一例として、約0.25mmの記録線幅で、文字、数字、図形、バーコードなどの画像が記録される。
【0057】
コントローラ46は、X軸サーボドライバ52を介してX軸ガルバノミラー48を制御するとともに、Z軸サーボドライバ54を介してZ軸ガルバノミラー50を制御する。
【0058】
X軸サーボドライバ52は、コントローラ46からの指示値に従ってX軸ガルバノミラー48の揺動ミラー48aの揺動位置を制御する回路であり、X軸ガルバノミラー48の角度センサの信号とコントローラ46からの指示値とを比較し、その誤差が最小になるようにX軸ガルバノミラー48に駆動信号を出力する。
【0059】
同様に、Z軸サーボドライバ54は、コントローラ46からの指示値に従ってZ軸ガルバノミラー50の揺動ミラー50aの揺動位置を制御する回路であり、Z軸ガルバノミラー50の角度センサの信号とコントローラ46からの指示値とを比較し、その誤差が最小になるようにZ軸ガルバノミラー50に駆動信号を出力する。
【0060】
以下に、リライタブルラベルにおける画像記録及び画像消去のメカニズムを説明する。
【0061】
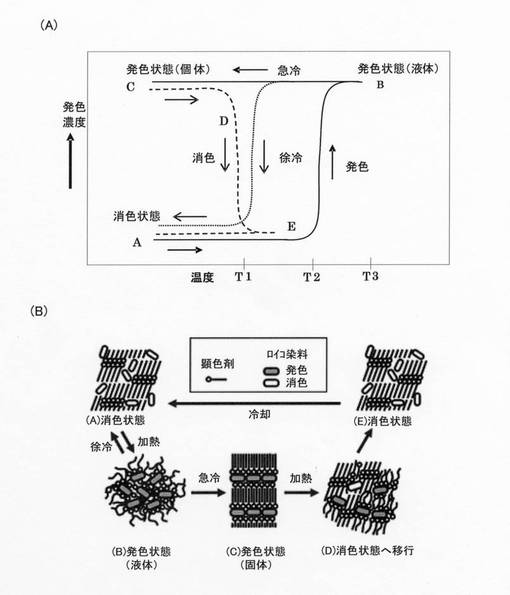
この画像記録及び画像消去のメカニズムは、熱により色調が可逆的に変化する態様である。この態様はロイコ染料及び可逆性顕色剤(以下、「顕色剤」と称することがある)からなり、色調が透明状態と発色状態とに熱により可逆的に変化する。
【0062】
図5(A)には、樹脂中にロイコ染料及び顕色剤を含んでなる熱可逆記録層を有する熱可逆記録媒体について、その温度−発色濃度変化曲線の一例が示され、図5(B)には、消色状態と発色状態とが熱により可逆的に変化する熱可逆記録媒体の発消色メカニズムが示されている。
【0063】
まず、初め消色状態(A)にある熱可逆記録層を昇温していくと、溶融温度T1にて、ロイコ染料と顕色剤とが溶融混合し、発色が生じ溶融発色状態(B)となる。溶融発色状態(B)から急冷すると、発色状態のまま室温に下げることができ、発色状態が安定化されて固定された発色状態(C)となる。
【0064】
この発色状態が得られたかどうかは、溶融状態からの降温速度に依存しており、徐冷では降温の過程で消色が生じ、初期と同じ消色状態(A)、あるいは急冷による発色状態(C)よりも相対的に濃度の低い状態となる。
【0065】
一方、発色状態(C)から再び昇温していくと、発色温度よりも低い温度T2にて消色が生じ(DからE)、この状態から降温すると、初期と同じ消色状態(A)に戻る。
【0066】
溶融状態から急冷して得た発色状態(C)は、前記ロイコ染料と前記顕色剤とが分子同士で接触反応し得る状態で混合された状態であり、これは固体状態を形成していることが多い。この状態では、前記ロイコ染料と前記顕色剤との溶融混合物(前記発色混合物)が結晶化して発色を保持した状態であり、この構造の形成により発色が安定化していると考えられる。
【0067】
一方、消色状態は、両者が相分離した状態である。この状態は、少なくとも一方の化合物の分子が集合してドメインを形成したり、結晶化した状態であり、凝集あるいは結晶化することにより前記ロイコ染料と前記顕色剤とが分離して安定化した状態であると考えられる。多くの場合、このように、両者が相分離して前記顕色剤が結晶化することにより、より完全な消色が生じる。
【0068】
なお、図5(A)に示される、溶融状態から徐冷による消色、及び発色状態からの昇温による消色はいずれもT2で凝集構造が変化し、相分離や前記顕色剤の結晶化が生じている。
【0069】
更に、図5(A)において、前記記録層を溶融温度T1以上の温度T3に繰返し昇温すると消去温度に加熱しても消去できない消去不良が発生したりする場合がある。これは、前記顕色剤が熱分解を起こし、凝集あるいは結晶化しにくくなってロイコ染料と分離しにくくなるためと思われる。繰返しによる前記熱可逆記録媒体の劣化を抑えるためには、前記熱可逆記録媒体を加熱する際に、図5(A)の前記溶融温度T1と前記温度T3の差を小さくすることにより、繰返しによる前記熱可逆記録媒体の劣化を抑えられる。
【0070】
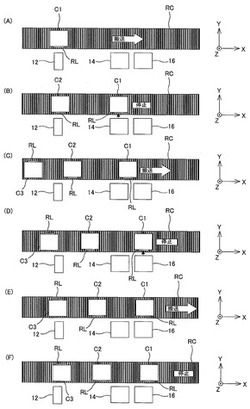
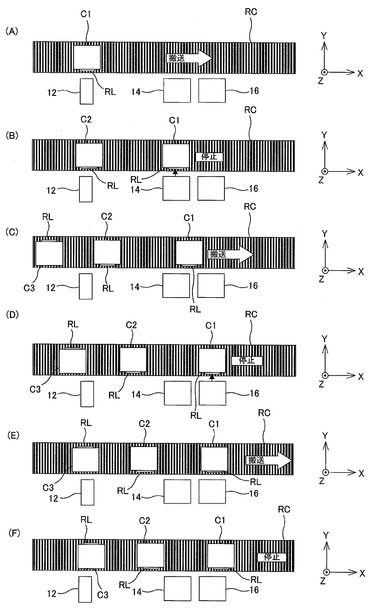
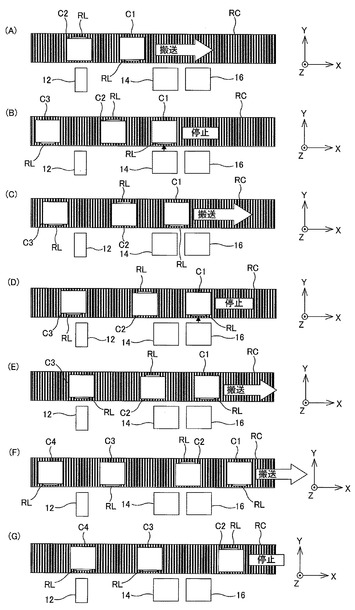
次に、レーザ光照射システム100の動作の一例を、図6(A)〜図6(F)を参照して説明する。なお、以下に説明する動作は、システム制御装置18により統括的に制御される。ホストコンピュータ47に内蔵された図示しないメモリには、リライタブルラベルRLに記録すべき画像の情報、すなわち現にコンテナCに収容されている荷物の内容、輸送先の情報、リライタブルラベルRLの使用回数などのデータが格納されているものとする。
【0071】
そして、ローラコンベアRCにおけるセンサ12よりも−X側に位置する部分上には、リライタブルラベルRLが貼付され、荷物が収容された例えばN個(N≧4)のコンテナCが、作業者によりX軸方向に並べて載置されている。
【0072】
ここで、コンテナCは、リライタブルラベルRLが貼付されている側面が、−Y側に位置するように、すなわち画像消去装置14及び画像記録装置16それぞれのレーザ光射出口に対向し得るようにローラコンベアRC上に載置されることになっている。なお、図6(A)〜図6(F)では、図示の制約上、ローラコンベアRCのX軸方向中央部のみが図示されている。
【0073】
以下、便宜上、ローラコンベアRC上に載置されたN個のコンテナCを、+X側から−X側への並び順に、それぞれ第1コンテナC1〜第NコンテナCNとも称する。
【0074】
そこで、先ず、作業者は、システム制御装置18の操作パネル(不図示)を操作して、システム制御装置18に搬送開始信号を送信する。
【0075】
搬送開始信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を開始する。これにより、N個のコンテナCは、ローラコンベアRC上を+X方向に搬送される。
【0076】
ここで、システム制御装置18は、第1コンテナC1がセンサ12の+Y側、すなわちセンサ12に正対する位置(以下、検出位置と称する)に差し掛かったときに(図6(A)参照)、センサ12による検出結果を取得する(センサ12からの検出信号又は非検出信号を受信する)。同様に、システム制御装置18は、後続のコンテナCが検出位置に差し掛かったときにも、センサ12による検出結果を取得する。
【0077】
そして、システム制御装置18は、センサ12から検出信号を受信した場合には、検出されたリライタブルラベルRLに対して画像の書き換え、すなわち画像消去及び画像記録を行うことを決定し、センサ12から非検出信号を受信した場合には、ただちにローラコンベアRCの駆動を停止する。
【0078】
ここでは、図6(A)から分かるように、第1コンテナC1の−Y側の側面にリライタブルラベルRLが貼付されているため、センサ12によりリライタブルラベルRLが検出され、システム制御装置18に検出信号が出力される。検出信号を受信したシステム制御装置18は、第1コンテナC1のリライタブルラベルRLに対して画像の書き換えを行うことを決定する。
【0079】
そして、システム制御装置18は、第1コンテナC1が、画像消去装置14の+Y側、すなわち画像消去装置14の消去用レーザ光射出口に正対する位置(以下、消去位置と称する)に位置したとき、ローラコンベアRCの駆動を停止する(図6(B)参照)。なお、システム制御装置18は、例えばセンサ12からの検出信号を受信した時点からのローラコンベアRCによるコンテナCの搬送距離が検出位置と消去位置との距離に等しくなったときに、ローラコンベアRCを停止させることにより、コンテナCを消去位置で停止させることとしている。
【0080】
第1コンテナC1が消去位置に位置しているとき、第2コンテナC2が検出位置に位置しており、センサ12による検出結果がシステム制御装置18に送信される。この場合、図6(B)から分かるように、第2コンテナC2の−Y側の側面には、リライタブルラベルRLが貼付されているため、センサ12からシステム制御装置18に検出信号が出力され、第2コンテナC2のリライタブルラベルRLに対しても画像の書き換えを行うことが決定される。
【0081】
また、ローラコンベアRCの駆動が停止されたとき、システム制御装置18から画像消去装置14に消去開始信号が出力される。
【0082】
消去開始信号を受信した画像消去装置14は、Z軸方向に延びるライン状(例えば長さ60mm、幅0.5mm)のレーザ光で第1コンテナに貼付されているリライタブルラベルRLをX軸方向に所定速度で所定時間走査し、該リライタブルラベルRLに記録された画像を消去する。すなわち、画像消去装置14は、リライタブルラベルRLに消去パワー(所定パワー以上のパワー)のレーザ光を照射することで、該リライタブルラベルRLに記録されている画像を非接触で消去する。
【0083】
この消去動作が終了したとき、画像消去装置14は、システム制御装置18に消去終了信号を出力する。
【0084】
消去終了信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を再開し(図6(C)参照)、第1コンテナC1が、画像記録装置16の+Y側の位置、すなわち画像記録装置16の記録用レーザ光射出口に正対する位置(以下、記録位置と称する)に位置したときに、ローラコンベアRCの駆動を停止する(図6(D)参照)。
【0085】
そして、システム制御装置18から画像記録装置16に記録開始信号が出力される。
【0086】
記録開始信号を受信した画像記録装置16は、第1コンテナC1に貼付されているリライタブルラベルRLをスポット状のレーザ光でX軸及びZ軸の2次元方向に走査して、一筆書きの要領で該リライタブルラベルRLに所定の画像を記録する。すなわち、画像記録装置16は、リライタブルラベルRLに記録パワー(所定パワー以上のパワー)のレーザ光を照射することで、該リライタブルラベルRLに新たな画像を非接触で記録する。
【0087】
この画像記録動作が終了したとき、画像記録装置16は、システム制御装置18に記録終了信号を送信する。
【0088】
記録終了信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を再開する(図6(E)参照)。
【0089】
このとき、第3コンテナC3が検出位置に差し掛かり、センサ12による検出結果がシステム制御装置18に出力される。この場合、図6(E)から分かるように、第3コンテナC3の−Y側の側面には、リライタブルラベルRLが貼付されていないため、センサ12からシステム制御装置18に非検出信号が出力され、ローラコンベアRCの駆動がただちに停止される(図6(F)参照)。なお、図6(E)から分かるように、第3コンテナC3の+Y側の側面には、リライタブルラベルRLが貼付されている。ここで、「コンテナCの+Y側の側面」とは、コンテナCにおけるY軸方向に対向する一対の側面のうち、+Y側に位置する側面を意味する。
【0090】
そして、システム制御装置18は、図示は省略されているが、例えば、その操作パネルの表示画面にて異常発生通知を表示すること、内蔵する音出力装置により警報音(音声を含む)を放出すること、その筐体に取り付けられた警報ランプを点灯(点滅を含む)することなどの異常発生通知を行う。
【0091】
これに応じて、作業者は、ローラコンベアRC上から第3コンテナC3を撤去した後、システム制御装置18の操作パネルを操作して、ローラコンベアRCの駆動を再開する。
【0092】
以後、第1コンテナC1は、次の工程(例えば輸送準備工程)に送られ、第2コンテナC2は、第1コンテナC1と同様に、画像が書き換えられた後、次の工程に送られる。第4コンテナC4〜第NコンテナCNは、第1コンテナC1〜第3コンテナC3と同様に、センサ12からの検出結果に基づいて、すなわち−Y側の側面にリライタブルラベルRLが貼付されているか否かに応じて、画像が書き換えられた後、次の工程に送られるか、又はローラコンベアRC上で停止された後、作業者により撤去される。
【0093】
なお、画像消去装置14及び画像記録装置16は、システム制御装置18により独立して制御される。従って、一のコンテナCが記録位置に位置すると同時に他のコンテナCが消去位置に位置する場合には、一のコンテナCのリライタブルラベルRLに対する記録動作と、他のコンテナCのリライタブルラベルRLに対する消去動作とが並行して行われる。
【0094】
また、一のコンテナCのリライタブルラベルRLに対する消去動作中又は記録動作中に、システム制御装置18がセンサ12から非検出信号を受信した場合にも、上述した異常発生通知が行われるが、消去動作及び記録動作が中断されることはない。この場合、既にローラコンベアRCの駆動が停止されているため、そのまま停止状態が維持され、作業者による他のコンテナCの撤去作業が行われる。
【0095】
また、撤去されたコンテナCのうち、リライタブルラベルRLが−Y側の側面以外の側面に貼付されているものは、そのリライタブルラベルRLが貼付された側面が−Y側を向くようにローラコンベアRCにおける検出位置よりも搬送方向上流側の位置に改めて載置すれば良い。また、撤去されたコンテナCのうち、リライタブルラベルRLが貼付されていないもの(例えばリライタブルラベルRLが元々貼付されていないもの、リライタブルラベルRLが剥がれ落ちてしまったものなど)は、リライタブルラベルRLを側面に貼付した後、そのリライタブルラベルRLが貼付された側面が−Y側を向くようにローラコンベアRCにおける検出位置よりも搬送方向上流側の位置に改めて載置すれば良い。
【0096】
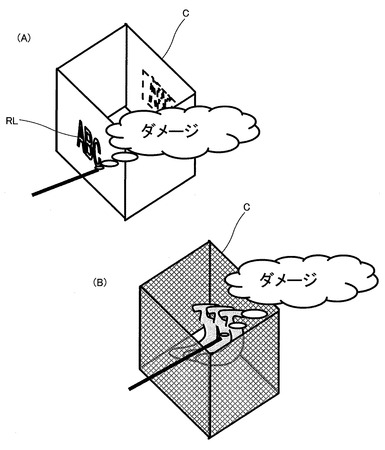
ところで、一般に、画像消去装置及び画像記録装置それぞれから射出されるレーザ光は、強力であり、コンテナに照射されると、図7(A)に示されるように、照射された部分は、溶ける、穴があく、焦げるなどのダメージ(損傷)を受けてしまう。
【0097】
また、コンテナが、例えばメッシュ構造体(図7(B)参照)、透明体などである場合、レーザ光がコンテナを通過し、コンテナ自体がダメージを受けるだけでなく、その内容物(荷物)にもダメージが及んでしまう。
【0098】
そこで、近年、レーザ光がリライタブルラベルから外れないように、画像消去装置又は画像記録装置のレーザ光射出口に対してコンテナを精度良く搬送及び位置決めできるコンベア装置が導入されている。
【0099】
しかしながら、コンテナに貼付されたリライタブルラベルが剥がれている場合、元々コンテナにリライタブルラベルが貼付されていない場合、作業者による置き間違いによりコンテナにおける上記レーザ光射出口に正対し得る部分以外の部分にリライタブルラベルが貼付されている場合などが想定される。
【0100】
これらの場合に、画像消去装置及び画像記録装置からコンテナに向けて所定パワー以上のレーザ光を射出すれば、コンテナ及びその内容物にダメージを与えることは、必至である。
【0101】
ここで、本明細書中、「所定パワー」は、コンテナ及びその内容物にダメージを与える最小のパワー(出力)を意味する。例えば、上記消去パワー及び記録パワーは、所定パワー以上のパワーであり、これらのパワーのレーザ光がコンテナCに照射されれば、コンテナC及びその内容物にダメージを与えてしまう。一方、所定パワー未満のパワーのレーザ光がコンテナに照射されても、コンテナC及びその内容物にほとんどダメージを与えない。
【0102】
本実施形態のレーザ光照射システム100は、コンテナCをX軸方向に搬送するローラコンベアRCを含むコンベア装置10と、ローラコンベアRC上における検出位置(特定位置)に搬送されたコンテナCの−Y側の側面におけるリライタブルラベルRLの有無を検出するセンサ12と、ローラコンベアRC上における検出位置の+X側の消去位置(所定位置)に搬送されたコンテナCの−Y側の側面に向けてレーザ光を射出可能な画像消去装置14と、ローラコンベアRC上における消去位置の+X側の記録位置(所定位置)に搬送されたコンテナCの−Y側の側面に向けてレーザ光を射出可能な画像記録装置16と、コンベア装置10、画像消去装置14及び画像記録装置16を制御するシステム制御装置18とを備えている。
【0103】
そして、システム制御装置18は、コンテナCを検出位置に搬送し、センサ12によりリライタブルラベルRLが検出されない場合には、画像消去装置14及び画像記録装置16から所定パワー以上のレーザ光を射出させない。
【0104】
この結果、コンテナCに所定パワー以上のレーザ光が照射されることを防止でき、ひいてはコンテナC及びその内容物の損傷を防止することができる。
【0105】
特に、本実施形態では、システム制御装置18は、センサ12によりリライタブルラベルRLが検出されない場合には、ローラコンベアRCの駆動をただちに停止する。
【0106】
この場合、作業者により、コンテナCをローラコンベアRC上から撤去する必要があるが、そのコンテナCに作業者がアクセスすることで、そのコンテナCの状況(リライタブルラベルRLの有無、位置など)を早々知ることができ、そのコンテナCの再搬送の準備にいち早く着手することができる。
【0107】
また、システム制御装置18は、センサ12によりリライタブルラベルRLが検出された場合には、コンテナCを消去位置に搬送して画像消去装置から所定パワー以上のレーザ光を射出させてリライタブルラベルRLに記録された画像を消去し、コンテナCを記録位置に搬送して画像記録装置16から所定パワー以上のレーザ光を射出させてリライタブルラベルRLに新たな画像を記録する。
【0108】
この結果、コンテナCの−Y側の側面に貼付されているリライタブルラベルRLに対して画像の書き換えを行うことができる。
【0109】
また、リライタブルラベルRLに対する画像の書き換えを、画像消去専用の画像消去装置14と画像記録専用の画像記録装置16とを用いて行うので、画像消去及び画像記録を、それぞれ高速かつ高精度に行うことができる。
【0110】
次に、本発明の第2の実施形態を、図8(A)〜図8(F)、図9を参照して説明する。第2の実施形態では、上記第1の実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第1の実施形態と異なる点を主に説明する。
【0111】
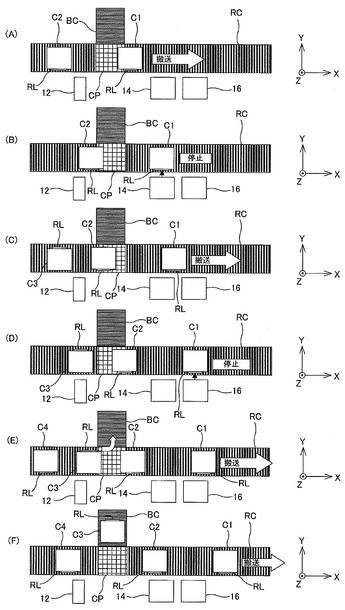
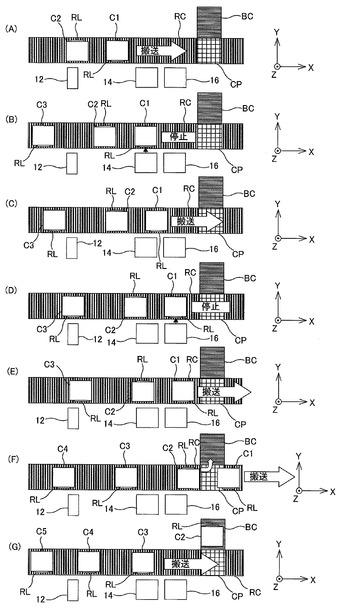
第2の実施形態に係るレーザ光照射システムでは、コンベア装置は、図8(A)に示されるように、ローラコンベアRCにおける検出位置と消去位置との間の部分に接続された分岐搬送路としての分岐コンベアBCを有している。
【0112】
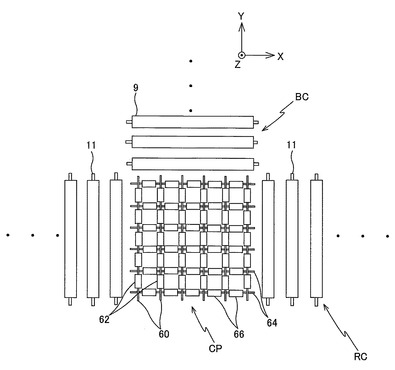
分岐コンベアBCは、Y軸方向に並べて配置されたX軸方向を軸線方向とする複数のローラ9で構成され(図9参照)、ローラコンベアRCに対して角度(例えば直角)を成すように配置され、コンテナCをY軸方向(+Y方向)に搬送可能である。複数のローラ9は、それぞれX軸周りに回転可能な状態で不図示の支持架台に支持されている。ここでは、一例として、複数のローラ9それぞれの最上面部(外周面における最も+Z側に位置する部分)は、複数のローラ11それぞれの最上面部と概ね同一水平面上に位置している。なお、図8(A)〜図8(F)、図9では、図示の制約上、分岐コンベアBCの一部のみが図示されている。
【0113】
分岐コンベアBCは、ローラコンベアRCと同様に、平ベルト装置を介してシステム制御装置により駆動制御される。
【0114】
また、ローラコンベアRCにおける分岐コンベアBCとの接続部分CPは、コンテナCをX軸又はY軸方向に搬送可能な構成を有している。
【0115】
詳述すると、接続部分CPは、図9に示されるように、Y軸方向に延び、X軸方向に所定間隔で並べて配置された複数の第1回転軸60と、該複数の第1回転軸60それぞれにY軸方向に並べて同軸に固定された小型の複数の第1ローラ部62と、X軸方向に延び、複数の第1回転軸60の直下にY軸方向に並べて配置された複数の第2回転軸64と、該複数の第2回転軸64それぞれにX軸方向に並べて同軸に固定された小型の複数の第2ローラ部66とを有している。
【0116】
すなわち、上記接続部分CPでは、+Z方向から見て、複数の第1及び第2回転軸60、64が格子状に配置されており、その格子のY軸方向に隣り合う交点間に第1ローラ部62が配置され、その格子のX軸方向に隣り合う交点間に第2ローラ部66が配置されている。
【0117】
第1及び第2ローラ部62、66の外径、並びに第1及び第2回転軸60、64の高さ(Z軸方向に関する位置)は、一例として、第1及び第2ローラ部62、66の最上面部(外周面における最も+Z側に位置する部分)が複数のローラ11及び複数のローラ9の最上面部と概ね同一水平面上に位置するように設定されている。これにより、ローラコンベアRCと分岐コンベアBCとの間での、コンテナCの受け渡しをスムーズに行うことができる。
【0118】
また、隣り合う2つの第1回転軸60には、無端ベルト(不図示)が架け渡されており、複数の第1回転軸60のうちの1つが第1モータ(不図示)により駆動されることにより、これに同期して他の第1回転軸60が回転し、複数の第2回転軸64のうちの1つが第2モータ(不図示)により駆動されることにより、これに同期して他の第2回転軸64が回転するようになっている。第1及び第2モータは、システム制御装置18により個別に制御される。
【0119】
以上より、システム制御装置18は、モータ13b及び第1モータを駆動させることで、複数のローラ11及び複数の第1ローラ部62を回転させて、コンテナCを検出位置から消去位置に搬送することができる。このとき、コンテナCは、接続部分CP上にて、Y軸周りに回転する複数の第1ローラ部62との間で作用する摩擦力により、回転していない複数の第2ローラ部66上を滑りながら+X方向に移動される。
【0120】
一方、システム制御装置18は、モータ13b及び第2モータを駆動させることで、複数のローラ11及び複数の第2ローラ部66を回転させて、コンテナCを検出位置から分岐コンベアBCに搬送することができる。このとき、コンテナCは、接続部分CP上にて、X軸周りに回転する複数の第2ローラ部66との間で作用する摩擦力により、回転していない複数の第1ローラ部62上を滑りながら+Y方向に移動される。
【0121】
第2の実施形態では、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対する画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合に、−Y側の側面にリライタブルRLが貼付されていないコンテナCをローラコンベアRCから分岐コンベアBCに向けて搬送する。
【0122】
以下に、第2の実施形態に係るレーザ光照射システムの動作の一例を、図8(A)〜図8(F)を参照して説明する。先ず、上記第1の実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0123】
図8(A)では、−Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が、検出位置を通過して消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が、検出位置に向けて搬送される。
【0124】
そして、第1コンテナC1が、消去位置に位置したときに、ローラコンベアRCの駆動が停止され、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作が行われる(図8(B)参照)。
【0125】
次いで、ローラコンベアRCの駆動が再開され、第1コンテナC1が記録位置に向けて搬送され、第2コンテナC2が消去位置に向けて搬送され、+Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3が検出位置に向けて搬送される(図8(C)参照)。
【0126】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動が停止され、第3コンテナC3が検出位置に位置する(図8(D)参照)。
【0127】
このとき、システム制御装置は、センサ12から非検出信号を受信し、第3コンテナC3を分岐コンベアBCに向けて搬送することを決定する。
【0128】
そして、システム制御装置は、ローラコンベアRCの駆動を再開するとともに、第3コンテナC3が分岐コンベアBCに向けて搬送されるように、接続部分CPを駆動制御する(図8(E)参照)。
【0129】
システム制御装置は、分岐コンベアBCに第3コンテナC3が搬送された(図8(F)参照)後、第1コンテナC1〜第3コンテナC3の場合と同様に、センサ12からの検出結果に基づいて、後続する第4コンテナC4〜第NコンテナCNそれぞれに対して、画像の書き換え又は分岐コンベアBCへの搬送のいずれかを行う。
【0130】
第2の実施形態によれば、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCが、ローラコンベアRCにおける検出位置と消去位置との間の部分に接続された分岐コンベアBCに搬送されるため、ローラコンベアRCの駆動を停止することなく、コンテナCに所定パワー以上のレーザ光が照射されることを防止できる。
【0131】
すなわち、画像の書き換え効率(スループット)の低下を防止しつつ、コンテナC及びその内容物の損傷を防止できる。
【0132】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0133】
次に、本発明の第3の実施形態を、図10(A)〜図10(G)を参照して説明する。第3の実施形態では、上記第1及び第2の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第1の実施形態と異なる点を主に説明する。
【0134】
第3の実施形態では、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対する画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合に、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCに対して消去動作及び記録動作を行わず、すなわち画像消去装置14及び画像記録装置16からレーザ光を射出させず、そのコンテナCが記録位置の+X側の所定位置(停止位置)に位置したときに、ローラコンベアRCの駆動を停止する。
【0135】
以下に、第3の実施形態に係るレーザ光照射システムの動作の一例を、図10(A)〜図10(G)を参照して説明する。先ず、上記第1及び第2の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0136】
図10(A)では、−Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が検出位置を通過し、消去位置に向けて搬送され、+Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が検出位置に差し掛かっている。
【0137】
このとき、システム制御装置は、センサ12から非検出信号を受信し、第2コンテナC2に対して記録動作及び消去動作を行わないこと、すなわち第2コンテナC2を消去位置及び記録位置で停止させず、かつ第2コンテナC2に対して画像消去装置14及び画像記録装置16からレーザ光を射出させないことを決定する。
【0138】
そして、第1コンテナC1が消去位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(B)参照)。このとき、第2コンテナC2は、検出位置と消去位置との間に位置し、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3が検出位置の−X側に位置している。
【0139】
そこで、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作が行われた後、ローラコンベアRCが駆動され、第1コンテナC1は、記録位置に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、第3コンテナC3は、検出位置に向けて搬送される(図10(C)参照)。
【0140】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(D)参照)。このとき、第2コンテナC2は、消去位置の−X側近傍に位置し、第3コンテナC3は、検出位置の−X側近傍に位置する。
【0141】
そこで、第1コンテナC1に貼付されているリライタブルラベルRLに対する記録動作が行われた後、ローラコンベアRCが駆動され、第1コンテナC1は、次の工程に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、第3コンテナC3は、検出位置に差し掛かる(図10(E)参照)。
【0142】
そして、第2コンテナC2が、消去位置を通過(素通り)し(図10(F)参照)、記録位置を通過(素通り)し、記録位置の+X側の停止位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(G)参照)。このとき、第3コンテナC3は、消去位置の−X側近傍に位置し、−Y側の側面にリライタブルラベルRLが貼付されている第4コンテナC4は、検出位置に位置している。
【0143】
そこで、システム制御装置は、上記第1の実施形態と同様に、異常発生通知の表示、警報音の発生、警報ランプの点灯などを行う。これに応じて、作業者は、第2コンテナC2の撤去を行った後、システム制御装置の操作パネルを操作して、ローラコンベアRCの駆動を再開する。
【0144】
以後、第3コンテナC3〜第NコンテナCNは、第1コンテナC1と同様に、画像の書き換えが行われた後、次の工程に向けて搬送されるか、又は第2コンテナC2と同様に、ローラコンベアRC上における停止位置で停止された後、作業者により撤去される。
【0145】
第3の実施形態によれば、システム制御装置は、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCに対して消去動作及び記録動作を行わないので、すなわち画像の書き換えに関与しないので、そのコンテナCに所定パワー以上のレーザ光が照射されることが防止される。この結果、そのコンテナC及びその内容物の損傷が防止される。
【0146】
すなわち、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCは、コンテナCは消去位置及び記録位置を素通りする。この結果、−Y側の側面にリライタブルラベルRLが貼付されているコンテナC全て、すなわち画像の書き換えが可能なコンテナC全てに対する画像の書き換え効率(スループット)の低下が抑制される。
【0147】
第3の実施形態では、特に、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCを、記録位置の+X側の所定の停止位置で停止させ、そのコンテナCを作業者により撤去させることとしているので、作業者は、そのコンテナCの状況(リライタブルラベルRLの位置、有無など)を早々に知ることができ、その再搬送準備にいち早く着手することができる。
【0148】
次に、本発明の第4の実施形態を、図11(A)〜図11(G)を参照して説明する。第4の実施形態では、上記第1〜第3の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第3の実施形態と異なる点を主に説明する。
【0149】
第4の実施形態では、図11(A)に示されるように、上記第2の実施形態と同様の構成を有する分岐コンベアBCが、ローラコンベアRCにおける記録位置の+X側の部分に接続されている。
【0150】
そして、ローラコンベアRCにおける記録位置の+X側近傍に位置するコンテナCを分岐コンベアBCに導くことができるようになっている。
【0151】
以下に、第4の実施形態に係るレーザ光照射システムの動作の一例を、図11(A)〜図11(G)を参照して簡単に説明する。先ず、上記第1〜第3の実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0152】
以後、上記第3の実施形態と同様の動作が行われ(図11(A)〜図11(E)参照)、+Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が消去位置及び記録位置を順次通過(素通り)した後、システム制御装置は、第2コンテナC2を分岐コンベアBCに向けて搬送する(図11(F)参照)。これと並行して、ローラコンベアRCの駆動は継続されており、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3及び第4コンテナC4は、順次消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第5コンテナC5は、検出位置に向けて搬送される(図11(G)参照)。
【0153】
以後、第3コンテナC3〜第NコンテナCNは、第1コンテナC1と同様に、画像の書き換えが行われた後、次の工程に向けて搬送されるか、又は第2コンテナC2と同様に、分岐コンベアBCに向けて搬送される。
【0154】
第4の実施形態によれば、画像の書き換えが行われないコンテナCは消去位置及び記録位置を通過(素通り)した後に分岐コンベアBCに搬送されるとともに、ローラコンベアRCの駆動が停止されない(継続される)ので、画像の書き換えが行われる他のコンテナC全てに対する画像の書き換え効率(スループット)の低下を防止できる。
【0155】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0156】
次に、本発明の第5の実施形態を、図12(A)〜図14(H)を参照して説明する。第5の実施形態では、上記第1〜第4の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第4の実施形態と異なる点を主に説明する。
【0157】
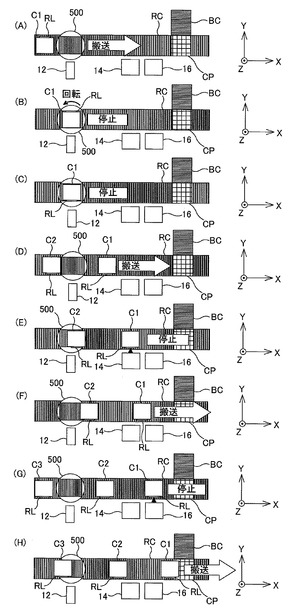
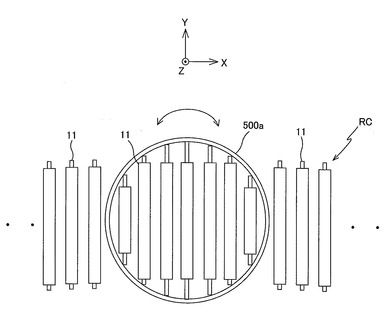
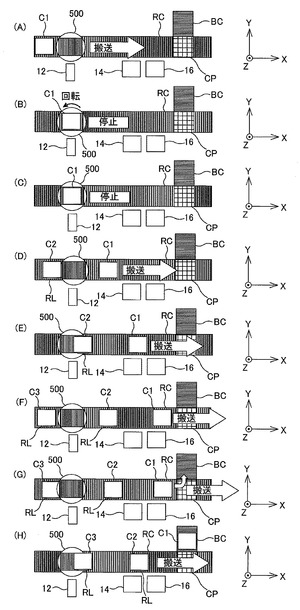
第5の実施形態のコンベア装置では、図12(A)に示されるように、上記第4の実施形態に比べて、ローラコンベアRCにおける検出位置に対応する部分を、Z軸周りに回転させる回転機構500を有している点が異なる。
【0158】
すなわち、回転機構500は、図13に示されるように、一例として、ローラコンベアRCにおける検出位置に対応する部分(複数のローラ11)を外側から回転可能に支持するZ軸方向を軸線方向とする円環状の支持部材500aと、該支持部材500aをZ軸周りに回転駆動するモータ等を含む駆動装置(不図示)とを有している。この駆動装置は、システム制御装置により制御される。
【0159】
システム制御装置は、センサ12から非検出信号を受信した場合、ローラコンベアRCの駆動をただちに停止して、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCを検出位置に位置させた状態で、回転機構500を制御し、そのコンテナCをZ軸周りに180°回転させる。このとき、センサ12は、そのコンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無を検出する。
【0160】
一方、システム制御装置は、センサ12から検出信号を受信した場合に、上記第1〜第4の各実施形態と同様に、そのコンテナCを検出位置で停止させない(素通りさせる)。
【0161】
そこで、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対して画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCに対する画像の書き換えを行わないことを決定する。
【0162】
以下に、第5の実施形態に係るレーザ光照射システムの動作の具体例(その1)を、図12(A)〜図12(H)を参照して簡単に説明する。先ず、上記第1〜第4の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0163】
図12(A)では、+Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が検出位置に向けて搬送されている。
【0164】
そして、第1コンテナC1が検出位置に差し掛かったとき(図12(B)参照)、システム制御装置は、センサ12から非検出信号を受信し、ローラコンベアRCの駆動をただちに停止して第1コンテナC1を検出位置に位置させ、回転機構500を制御して、第1コンテナC1をZ軸周りに180°回転させる(図12(C)参照)。
【0165】
このとき、第1コンテナC1におけるリライタブルラベルRLが貼付されている元の+Y側の側面が−Y側の側面となり、リライタブルラベルRLが貼付されていない元の−Y側の側面が+Y側の側面となる。
【0166】
そこで、センサ12は、リライタブルラベルRLを検出し、システム制御装置に検出信号を出力する。検出信号を受信したシステム制御装置は、第1コンテナC1の−Y側の側面に貼付されているリライタブルラベルRLに対して画像の書き換えを行うことを決定し、ローラコンベアRCの駆動を再開する。これにより、第1コンテナC1が、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が、検出位置に向けて搬送される(図12(D)参照)。
【0167】
そして、第2コンテナC2が検出位置に差し掛かったときに、システム制御装置は、センサ12から検出信号を受信し、第2コンテナC2をそのまま素通りさせ、第1コンテナC1が消去位置に位置したときにローラコンベアRCの駆動を停止する(図12(E)参照)。
【0168】
そこで、システム制御装置は、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作を行った後に、ローラコンベアRCの駆動を再開する(図12(F)参照)。
【0169】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動を停止し、第1コンテナC1に貼付されているリライタブルラベルRLに対する記録動作を行う(図12(G)参照)。
【0170】
第1コンテナC1に対する記録動作が行われた後、ローラコンベアRCの駆動が再開され、第1コンテナC1は、次の工程に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されているコンテナC3が検出位置に向けて搬送される(図12(H)参照)。
【0171】
以後、第2コンテナC2〜第NコンテナCNのうち、+Y側の側面にリライタブルラベルRLが貼付されているものは、第1コンテナC1と同様に、検出位置で向きが変えられた後、画像の書き換えが行われ、次の工程に向けて搬送される。一方、第2コンテナC2〜第NコンテナCNのうち、−Y側の側面にリライタブルラベルRLが貼付されているものは、画像の書き換えが行われた後、次の工程に向けて搬送される。
【0172】
以下に、第5の実施形態に係るレーザ光照射システムの動作の具体例(その2)を、図14(A)〜図14(H)を参照して簡単に説明する。先ず、上記第1〜第4の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0173】
図14(A)では、リライタブルラベルRLが貼付されていない第1コンテナC1が検出位置に向けて搬送されている。
【0174】
そして、第1コンテナC1が検出位置に差し掛かったとき、センサ12からシステム制御装置に非検出信号が出力され、ローラコンベアRCの駆動が停止され、第1コンテナC1は、検出位置にて、回転機構500により、Z軸周りに180°回転される(図14(B)参照)。
【0175】
そこで、センサ12からシステム制御装置に非検出信号が出力され、第1コンテナC1に対し、画像の書き換えを行わないことが決定される(図14(C)参照)。
【0176】
そして、ローラコンベアRCの駆動が再開され、第1コンテナC1は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が検出位置に向けて搬送される(図14(D)参照)。
【0177】
次いで、第2コンテナC2が検出位置に差し掛かったときに、センサ12からシステム制御装置に検出信号が出力され、第2コンテナC2は、検出位置をそのまま通過(素通り)し、第1コンテナC1は、消去位置を通過(素通り)する(図14(E)参照)。
【0178】
そして、第1コンテナC1は、記録位置を通過(素通り)し、第2コンテナC2は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3は、検出位置に向けて搬送される(図14(F)参照)。
【0179】
そこで、第1コンテナC1は、分岐コンベアBCに向けて搬送される(図14(G)参照)。一方、第2コンテナC2は、消去位置にて消去動作が行われた後、記録位置に向けて搬送され、第3コンテナC3は、検出位置を通過(素通り)する(図14(H)参照)。
【0180】
以後、第2コンテナC2〜第NコンテナCNのうち、リライタブルラベルRLが貼付されていないものは、第1コンテナC1と同様に、分岐コンベアBCに向けて搬送される。一方、第2コンテナC2〜第NコンテナCNのうち、−Y側の側面にリライタブルラベルRLが貼付されているものは、画像の書き換えが行われた後、次の工程に向けて搬送される。
【0181】
第5の実施形態では、検出位置に差し掛かったコンテナCの−Y側の側面にリライタブルラベルRLが貼付されている場合に、そのコンテナCをそのまま通過させて、画像の書き換えを行う。
【0182】
一方、検出位置に差し掛かったコンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合に、そのコンテナCが検出位置にてZ軸周りに180°回転されて、コンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無がセンサ12により検出される。
【0183】
そして、リライタブルラベルRLが検出された場合、そのコンテナCに対して画像の書き換えを行うことが決定される。一方、リライタブルラベルRLが検出されない場合、そのコンテナCに対して画像の書き換えを行わないことが決定され、そのコンテナCは、消去位置及び記録位置を通過(素通り)した後に、分岐コンベアBCに搬送される。
【0184】
この結果、コンテナCの元の(回転前の)−Y側の側面にリライタブルラベルRLが貼付されていなくても、元の(回転前の)+Y側の側面にリライタブルラベルRLが貼付されている場合には、そのリライタブルラベルRLに対して画像の書き換えを自動的に行うことができる。
【0185】
すなわち、例えば、作業者によるコンテナCの置き間違いにより、元の+Y側の側面にリライタブルラベルRLが貼付されているコンテナCがローラコンベアRC上に載置されている場合であっても、そのコンテナCを再搬送する必要がない。
【0186】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0187】
なお、第5の実施形態では、分岐コンベアBCを設けなくても良い。この場合、コンテナCの+Y側及び−Y側の側面にリライタブルラベルRLが貼付されていないときに、上記第1又は第3の実施形態と同様に、ローラコンベアRCの駆動を停止して、作業者に異常発生を通知し、そのコンテナCを撤去するようにしても良い。
【0188】
また、第5の実施形態では、上記第2の実施形態と同様に、分岐コンベアBCをローラコンベアRCにおける検出位置と消去位置との間の部分に接続し、+Y側及び−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCを消去位置及び記録位置を通過させることなく、分岐コンベアBCに向けて搬送することとしても良い。
【0189】
本発明は、上記実施形態に特に限定されることなく、種々の変更が可能である。
【0190】
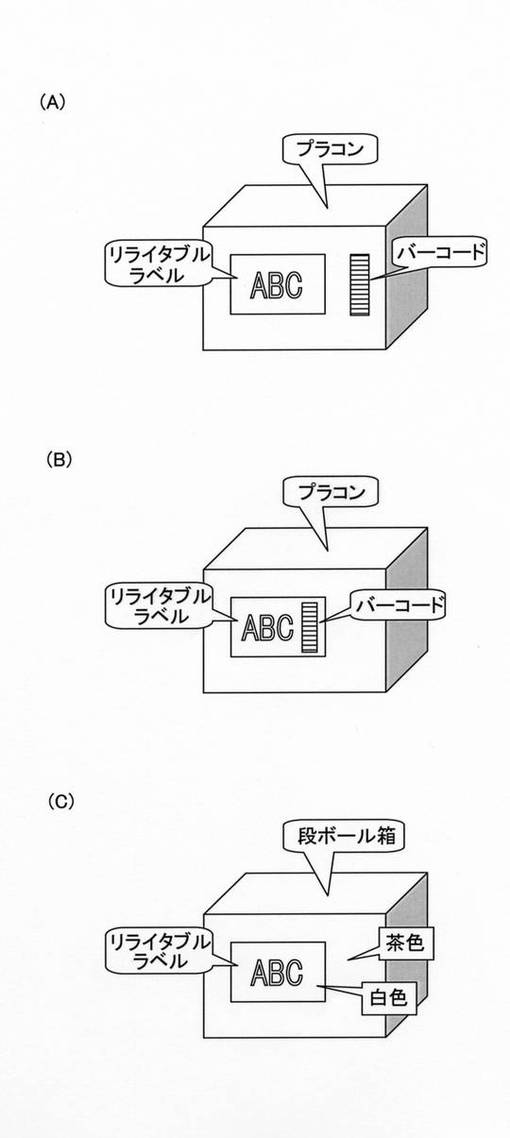
例えば、コンテナにおけるリライタブルラベルRLの有無の検出方法として、上記第1〜第5の各実施形態におけるセンサ12による検出方法以外の様々な方法が考えられる。
【0191】
先ず、コンテナとして、例えばプラスッチック製のものを用いる場合に、上記第1〜第5の各実施形態のように、反射率の差により、リライタブルラベルの有無を検出することが困難になることが想定される。
【0192】
そこで、検出手段により検出可能な識別情報を表示するラベルを、コンテナにおけるリライタブルラベルが貼付されている面に貼付する方法が考えられる。具体的には、図15(A)に示されるように、バーコードラベルをコンテナの一側面におけるリライタブルラベルとは異なる箇所に貼付し、これをバーコードスキャナで読み取る方法が挙げられる。
【0193】
この方法は、簡単で確実な方法であるが、リライタブルラベルが剥がれ落ちてしまった場合には、対応できない。
【0194】
そこで、リライタブルラベルの中の識別情報を検出する方法が考えられる。具体的には、図15(B)に示されるように、例えばバーコードをリライタブルラベルに記録し、これをバーコードスキャナで読み取る方法が挙げられる。
【0195】
この方法は、図15(A)に示される方法のようなバーコードラベルが不要であるが、何らかの手違いによりリライタブルラベルにおけるバーコードを含む画像が消去されている場合には、対応できない。
【0196】
そこで、リライタブルラベルの上にバーコードラベルを貼る方法が考えられる。
【0197】
また、上記第1〜第5の各実施形態と同様に、検出用の識別情報が表示されたマークを用いないで、リライタブルラベルを検出する方法が考えられる。具体的には、図15(C)に示されるように、一般に、リライタブルラベルの色は白色に近く、段ボール箱の色は茶色なので、カラーセンサにより、段ボール箱におけるリライタブルラベルの有無を判別できる。
【0198】
上記第1〜第5の各実施形態では、センサ12(検出手段)として、反射型光電センサが用いられているが、これに限らず、例えば紙、プラスチック等を含む樹脂製、金属製などのコンテナの−Y側の側面におけるリライタブルラベルRLの有無を検出できれば、他のセンサであっても良い。
【0199】
上記第3〜第5の各実施形態では、画像記録装置16によりリライタブルラベルRLに記録された画像を検査(チェック)する画像検査装置を、画像記録装置16の+X側(搬送方向下流側)に配置することとしても良い。
【0200】
この画像検査装置は、一例として、コンテナCの−Y側の側面に貼付されているリライタブルラベルRLに記録された画像(以下、記録画像と称する)を撮像する電子カメラなどを有し、該電子カメラにより撮像された記録画像の画質(品質)が基準画質以上であるか否かを判定する。画像検査装置の判定結果は、システム制御装置に送信される。
【0201】
システム制御装置は、画像検査装置から記録画像の画質が基準画質以上であるという判定結果を受信した場合には、そのコンテナCを次の工程に向けて搬送する。
【0202】
一方、システム制御装置は、画像検査装置から記録画像の画質が基準画質以上でないとう判定結果を受信した場合には、ローラコンベアRCの駆動を停止するか(第3の実施形態の場合)、又はコンテナCを分岐コンベアBCに向けて搬送する(第4又は第5の実施形態の場合)。なお、画像検査装置は、コンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合には、記録画像の画質が基準画質以上でないと判定し、その判定結果をシステム制御装置に送信する。
【0203】
以上より、−Y側の側面にリライタブルラベルRLが貼付され、かつその記録画像の画質が基準画質以上であるコンテナCは、次の工程に向けて搬送される。一方、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナC、及び−Y側の側面にリライタブルラベルRLが貼付され、かつその記録画像の画質が基準画質未満であるコンテナCは、搬送が停止されて作業者により撤去されるか(第3の実施形態の場合)、又は分岐コンベアBCに向けて搬送される(第4又は第5の実施形態の場合)。
【0204】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16それぞれによるリライタブルラベルRLへのレーザ光の照射は、コンテナCを停止させた状態で行なっているが、これに代えて、コンテナCを搬送しながら行っても良い。但し、画像記録装置16によりリライタブルラベルRLにレーザ光を照射する場合(画像記録を行う場合)には、ローラコンベアRCの駆動に伴いコンテナCに振動が発生することを考慮して、コンテナCを停止させた状態で行うことが好ましい。この結果、記録画像の品質低下を防止できる。
【0205】
上記第1〜第5の各実施形態では、ローラコンベアRCが用いられているが、これに限らず、例えばベルトコンベアなどのその他のコンベアを用いても良い。
【0206】
上記第1〜第5の各実施形態では、ローラコンベアRCを構成する複数のローラ11全てを同期して回転させることとしているが、これに限らず、ローラコンベアRCを、X軸方向に関して、複数のローラ11をそれぞれが含む複数のコンベア部に分割して、各コンベア部を独立して駆動させることとしても良い。
【0207】
詳述すると、各コンベア部は、一例として、X軸方向に一連に並べて配置された複数のローラ11、該複数のローラ11のうち、一のローラ11を回転駆動するモータを含む駆動装置(不図示)などを有している。各コンベア部では、隣り合う2つのローラ11に無端ベルトが巻き掛けられており、複数のローラ11のうち、一のローラ11が回転駆動されると、これに同期して他のローラ11も回転駆動されるようになっている。一方、隣り合うコンベア部の互いに隣接する2つのローラ11には、無端ベルトが巻き掛けられていない。各コンベア部は、対応する駆動装置を介してシステム制御装置18により独立に制御される。以上より、X軸方向に並べて配置された複数のコンベア部は、システム制御装置18の指示の下、コンテナCを隣り合う2つのコンベア部間で受け渡しながら+X方向に搬送可能である。
【0208】
また、複数のコンベア部は、それぞれ独立して駆動可能なので、少なくとも1つのコンベア部を駆動するとともに、他のコンベア部を停止させることができる。これにより、例えば、先行するコンテナCを消去位置に位置させて消去動作を行っているときに、後続する少なくとも1つのコンテナCを消去位置の−X側に間隔を詰めた状態で並ばせておくことができる。また、先行するコンテナCを記録位置に位置させて記録動作を行っているときに、後続する直近のコンテナCを消去位置に位置させて消去動作を行うとともにそのコンテナCに後続する少なくとも1つのコンテナCを消去位置の−X側に間隔を詰めた状態で並ばせておくことができる。この結果、画像の書き換え効率(スループット)を格段に向上することができる。
【0209】
上記第1の実施形態では、リライタブルラベルRLが+Y側の側面に貼付されているコンテナCが作業者により検出位置から撤去されているが、これに代えて、例えばそのコンテナCを検出位置において例えばZ軸周りに180°回転させてそのコンテナCの元の+Y側の面(リライタブルラベルRLが貼付されている側面)を−Y側に位置させた後、ローラコンベアRCの駆動を再開しても良い。この場合、センサ12からリライタブルラベルRLの検出信号を受信したシステム制御装置18は、そのコンテナCに対する画像の書き換えを行う。
【0210】
上記第1〜第5の各実施形態では、センサ12の検出時点を基準として、コンテナCを消去位置又は記録位置で停止させることとしているが、これに限らず、センサ12以外の専用のセンサを別途設けて、該センサの検出時点を基準として、コンテナCを消去位置又は記録位置で停止させることとしても良い。
【0211】
上記第3〜第5の各実施形態では、システム制御装置は、コンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合、そのコンテナCを消去位置及び記録位置で停止させず、かつ画像消去装置14及び画像記録装置16からそのコンテナCに対してレーザ光を照射させないこととしているが、これに代えて、そのコンテナCを消去位置及び記録位置で順次停止させて、画像消去装置14及び画像記録装置16からコンテナCにダメージを与えない程度の、すなわち所定パワー未満のパワーのレーザ光を照射しても良い。
【0212】
この場合、センサ12の検出結果に応じてレーザの出力を調整しさえすれば、センサ12の検出結果に関わらずコンテナCを同様に動作させることができるので、制御が格段に簡単になる。
【0213】
上記第5の実施形態では、コンテナCの−Y側の側面におけるリライタブルラベルRLの有無をセンサ12により検出した後、回転機構500により該コンテナCをZ軸周りに180°回転させて該コンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無をセンサ12により再び検出することとしているが、これに限られない。具体的には、円環状の支持部材500aに外側から支持されるコンベア部を接続部分CPと同様の構成(X軸又はY軸方向に搬送可能な構成)とする。そして、コンテナCの−Y側の側面においてリライタブルラベルRLがセンサ12により検出されない場合に、そのコンベア部を例えばZ軸周りの一方向に90°ずつ回転させ、コンテナCの元の−X側、+Y側及び+X側の各側面を−Y側に位置させて、リライタブルラベルRLの有無をセンサ12により検出することとしても良い。
【0214】
この場合、リライタブルラベルRLが検出されたときには、コンテナCの総回転角度(90°、180°、270°)に関わらず、リライタブルラベルRLが貼付されている側面を−Y側に位置させた状態で、該リライタブルラベルRLに対して画像の書き換えを行うべく、該コンテナCを+X方向にそのまま搬送できる。一方、リライタブルラベルRLが検出されなかったとき、すなわちコンテナCの総回転角度が360°のときは、該コンテナCを分岐コンベアBCに搬送すべく、コンテナCを+X方向にそのまま搬送できる。
【0215】
上記第1の実施形態では、センサ12により、コンテナCの−Y側の側面においてリライタブルラベルRLが検出されなかったときに、ローラコンベアRCの駆動をただちに停止させることとしているが、これに限られず、要は、そのコンテナCが消去位置に搬送される前にローラコンベアRCの駆動を停止させることとすれば良い。
【0216】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16が別体に設けられているが、一体に設けることとしても良い。
【0217】
コンベア装置、センサ12、画像消去装置14及び画像記録装置16の位置関係は、上記第1〜第5の各実施形態で説明したものに限定されない。
【0218】
上記第1〜第5の各実施形態に係るレーザ光照射システムでは、画像が記録されているリライタブルラベルRLに対して消去動作及び記録動作を行っているが(画像の書き換えを行っているが)、これに限らず、要は、リライタブルラベルRLに対して消去動作及び記録動作の少なくとも一方を行うこととすれば良い。すなわち、画像が記録されているリライタブルラベルRLに対して消去動作のみを行うこととしても良いし、画像が記録されていないリライタブルラベルRLに対して記録動作のみを行うこととしても良い。
【0219】
上記第1〜第5の各実施形態では、レーザ光射出手段は、画像消去装置14及び画像記録装置16を有しているが、画像消去装置14及び画像記録装置16の一方のみを有していても良い。この場合、レーザ光照射システムは、リライタブルラベルRLに対する画像の消去及び記録の一方のみを行うこととなる。
【0220】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16のレーザ(光源)として、半導体レーザが用いられているが、これに限らず、例えば、固体レーザ、ファイバーレーザ、CO2レーザなどを用いても良い。
【符号の説明】
【0221】
10…コンベア装置(搬送手段)、12…センサ(検出手段)、14…画像消去装置(レーザ光射出手段の一部)、16…画像記録装置(レーザ光射出手段の一部)、18…システム制御装置(制御手段)、100…レーザ光照射システム、C…コンテナ(搬送物)、RL…リライタブルラベル(熱可逆記録媒体)、RC…ローラコンベア(搬送路)。
【先行技術文献】
【特許文献】
【0222】
【特許文献1】特開2008−194905号公報
【技術分野】
【0001】
本発明は、レーザ光照射システムに係り、更に詳しくは、搬送物に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムに関する。
【背景技術】
【0002】
従来、例えばコンベア(搬送手段)により搬送可能な搬送物の一側の面に貼付されているリライタブルラベル(熱可逆記録媒体)にレーザ光を照射して、画像の消去及び記録の少なくとも一方を行うシステムが知られている(例えば、特許文献1参照)。
【発明の概要】
【発明が解決しようとする課題】
【0003】
しかしながら、例えばコンベア上における搬送物の向きなどによっては、所定パワー以上のレーザ光(例えば画像の消去又は記録に必要なパワーのレーザ光)が搬送物に照射され、搬送物に損傷を与えるおそれがあった。
【課題を解決するための手段】
【0004】
本発明は、搬送物の一側の面に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムであって、前記搬送物を所定の搬送方向に搬送する搬送路を含む搬送手段と、前記搬送路上における特定位置に搬送された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出する検出手段と、前記搬送路上における前記特定位置の前記搬送方向下流側の少なくとも1つの所定位置に搬送された前記搬送物の前記一側の面に向けてレーザ光を射出可能なレーザ光射出手段と、前記搬送手段及び前記レーザ光射出手段を制御する制御手段とを備え、前記制御手段は、前記搬送物を前記特定位置に搬送し、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記レーザ光射出手段から所定パワー以上のレーザ光を射出させないレーザ光照射システムである。ここで、「所定パワー以上のレーザ光を射出させない」とは、所定パワー未満のレーザ光を射出させること及びレーザ光を射出させないことを含む意味である。
【発明の効果】
【0005】
本発明によれば、搬送物に所定パワー以上のレーザ光が照射されることを防止できる。
【図面の簡単な説明】
【0006】
【図1】本発明の第1の実施形態に係るレーザ光照射システムの概略構成を示す図である。
【図2】レーザ光照射システムが備える画像消去装置を説明するための図である。
【図3】レーザ光照射システムが備える画像記録装置を説明するための図である。
【図4】レーザ光照射システムの制御の構成を示すブロック図である。
【図5】図5(A)は、レーザ光照射システムによる画像書き換えの対称物であるリライタブルラベルの発色−消色特性を示すグラフであり、図5(B)は、リライタブルラベルの発色−消色変化のメカニズムを表す図である。
【図6】図6(A)〜図6(F)は、レーザ光照射システムの動作を説明するための図(その1〜その6)である。
【図7】図7(A)及び図7(B)は、コンテナにレーザ光が照射されたときの被害状況を説明するための図である。
【図8】図8(A)〜図8(F)は、第2の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その6)である。
【図9】第2の実施形態に係るレーザ光照射システムが有するローラコンベアにおける分岐コンベアとの接続部分を説明するための図である。
【図10】図10(A)〜図10(G)は、第3の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その7)である。
【図11】図11(A)〜図11(G)は、第4の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その7)である。
【図12】図12(A)〜図12(H)は、第5の実施形態に係るレーザ光照射システムの動作を説明するための図(その1〜その8)である。
【図13】第5の実施形態に係るレーザ光照射システムが有する回転機構を説明するための図である。
【図14】図14(A)〜図14(H)は、第5の実施形態に係るレーザ光照射システムの動作を説明するための図(その9〜その16)である。
【図15】図15(A)〜図15(C)は、搬送物としてのコンテナに貼付されているリライタブルラベルを検出する方法の具体例(その1〜その3)を説明するための図である。
【発明を実施するための形態】
【0007】
以下、本発明の第1の実施形態を図1〜図6(F)に基づいて説明する。図1には、第1の実施形態に係るレーザ光照射システムとしてのレーザ光照射システム100の概略構成が示されている。本実施形態では、一例として、図1に示されるようなZ軸方向を鉛直方向とするXYZ三次元直交座標系が設定されている。
【0008】
レーザ光照射システム100は、以下に詳述するように、搬送物の一例としての輸送用のコンテナCに貼付されたリライタブルラベルRLにレーザ光を照射して、画像の書き換えを行う。
【0009】
ここで、「画像」とは、コンテナCに収容される荷物の内容、輸送先の情報、リライタブルラベルRLの使用回数などのリライタブルラベルRLに記録される視認可能な情報を意味する。
【0010】
ここで、コンテナCは、一例として、直方体形状の段ボール箱である。リライタブルラベルRLは、加熱、冷却のプロセスの違いにより発色又は消色する熱可逆記録媒体であり、レーザ光を吸収し発熱する光熱変換材を含んでいる。
【0011】
レーザ光照射システム100は、図1に示されるように、搬送手段としてのコンベア装置10、検出手段としてのセンサ12、レーザ光射出手段15、及び制御手段としてのシステム制御装置18(図4参照)を含む。
【0012】
コンベア装置10は、一例として、X軸方向に所定間隔で並べて配置されたY軸方向を軸線方向とする複数のローラ11と、該複数のローラ11の下方に設置された平ベルト装置(不図示)とを有している。複数のローラ11は、それぞれY軸周りに回転可能な状態で不図示の支持架台に支持されている。以下、便宜上、複数のローラ11を合わせてローラコンベアRC(搬送路)とも称する。なお、図1では、図示の制約上、ローラコンベアRCのX軸方向中央部のみが図示されている。
【0013】
ローラコンベアRCを構成する複数のローラ11は、一例として、実質的に同じものであり、それぞれの最上面部(外周面における最も+Z側に位置する部分)が概ね同一水平面上に位置している。
【0014】
上記平ベルト装置は、図示は省略されているが、一例として、ローラコンベアRCの最も+X側及び最も−X側のローラ11の下方にそれぞれY軸周りに回転可能に配置された一対のプーリと、該一対のプーリに巻き掛けられた平ベルトと、該平ベルトをローラコンベアRCを構成する複数のローラ11に当接させる当接位置と該当接位置から離間する離間位置との間で上下動させる例えばエアシリンダ等のアクチュエータ13aを含む昇降装置と、一対のプーリのうちの一方をY軸周りに回転駆動するモータ13bとを有している。アクチュエータ13a及びモータ13bは、システム制御装置18により制御される(図4参照)。
【0015】
コンベア装置10は、システム制御装置18の指示の下、モータ13bを駆動して平ベルトを循環駆動させるとともに、アクチュエータ13aを駆動して平ベルトを当接位置に位置させることで、ローラコンベアRCを構成する複数のローラ11を同期して回転させ、この状態から、平ベルトを離間位置に位置させることで、ローラコンベアRCを構成する複数のローラ11の回転を停止させる。
【0016】
そして、ローラコンベアRC上にコンテナCが載置されているときに、上述のようにして複数のローラ11が回転(ローラコンベアRCが駆動)されると、コンテナCは、複数のローラ11との間で作用する摩擦力により、複数のローラ11間で受け渡されながら、+X方向に搬送され、上述のようにして複数のローラ11の回転(ローラコンベアRCの駆動)が停止されると、コンテナCの搬送が停止される。
【0017】
センサ12は、一例として、発光部及び受光部を有する反射型光電センサである。センサ12は、その発光部及び受光部が+Y側を向いた状態でローラコンベアよりも例えば数cm〜数十cm高い位置に位置した状態で、ローラコンベアRCの−Y側に配置されている。
【0018】
センサ12は、その+Y側(ローラコンベアRC上における対向する位置)に位置したコンテナCの−Y側の側面に向けて発光部から光を射出してその反射光を受光部で受光することにより、コンテナCの−Y側の側面の反射率に関する情報を検出する。ここで、「コンテナCの−Y側の側面」とは、コンテナCにおけるY軸方向に対向する一対の側面のうち、−Y側に位置する側面を意味する。
【0019】
ところで、コンテナC(段ボール箱)の側面は、表面が粗く、光の反射率が低い。これに対し、リライタブルラベルRLの表面は、フィルムで覆われており、平滑なため、光の反射率が高い。従って、センサ12は、コンテナCの−Y側の側面におけるリライタブルラベルRLの有無を検出できる。センサ12は、その検出結果、すなわち検出信号又は非検出信号をシステム制御装置18に出力する。
【0020】
なお、検出信号は、センサ12がリライタブルラベルRLを検出したときに出力する信号である。一方、非検出信号は、センサ12がコンテナCのみを検出したとき、すなわちリライタブルラベルRLを検出しなかったときに出力する信号である。
【0021】
レーザ光射出手段15は、一例として、画像消去装置14及び画像記録装置16を有している。
【0022】
画像消去装置14は、一例として、ローラコンベアRCの−Y側であって、センサ12の+X側に配置されている。
【0023】
画像消去装置14は、図2に示されるように、1次元配列された複数のレーザダイオード(半導体レーザ)を含む1次元レーザアレイLAと、光学系SO1、端子台17、操作盤19、コントローラ21、筐体14a(図1参照)などを含む。なお、図示は省略されているが、1次元レーザアレイLA、光学系SO1、端子台17、コントローラ21は、筐体14a内に収容されており、操作盤19は、筐体14aの例えば側面(又は上面)に設けられている。
【0024】
1次元レーザアレイLAは、一例として、Z軸方向に並べて配置(1次元配列)された図示しない複数(例えば17個)のレーザダイオードを有する。ここでは、最も+Z側のレーザダイオードと最も−Z側のレーザダイオードとのZ軸方向に関する距離は、例えば10mmに設定されている。1次元レーザアレイLAは、一例として、断面がライン状のレーザ光を+X方向に射出する。
【0025】
光学系SO1は、一例として、第1のシリンドリカルレンズ20、第1の球面レンズ22、マイクロレンズアレイ24、第2の球面レンズ26、第2のシリンドリカルレンズ28、ガルバノミラー装置30を有する。以下、便宜上、第1のシリンドリカルレンズ20、第1の球面レンズ22、マイクロレンズアレイ24、第2の球面レンズ26及び第2のシリンドリカルレンズ28を合わせて、レンズ群と称する。
【0026】
第1のシリンドリカルレンズ20は、1次元レーザアレイLAから射出されたライン状のレーザ光の光路上に配置されており、該レーザ光を幅方向(複数のレーザダイオードの配列方向に直交する方向に平行な方向)に僅かに集光する。ここでは、第1のシリンドリカルレンズ20として小型のものが、1次元レーザアレイLAの射出面に近接して配置されている。
【0027】
第1の球面レンズ22は、第1のシリンドリカルレンズ20を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、マイクロレンズアレイ24に集光する。
【0028】
マイクロレンズアレイ24は、第1の球面レンズ22を介したライン状のレーザ光の光路上に配置されており、該レーザ光を長さ方向(複数のレーザダイオードの配列方向に平行な方向)に拡散して、長さ方向の光分布を均一化する。
【0029】
第2の球面レンズ26は、マイクロレンズアレイ24を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、長さ方向及び幅方向に均一に拡大する。
【0030】
第2のシリンドリカルレンズ28は、第2の球面レンズ26を介したライン状のレーザ光の光路上に配置されており、該レーザ光を幅方向に僅かに集光する。
【0031】
ガルバノミラー装置30は、ガルバノメータに、レーザ光を反射する往復揺動可能な揺動ミラー30aが装着されたものである。ここでは、揺動ミラー30aは、一例として、Z軸周りに揺動可能となっている。ガルバノミラー装置30は、その揺動ミラー30aの回転角度を検出する角度センサ(不図示)を有している。
【0032】
ガルバノミラー装置30は、その揺動ミラー30aが第2のシリンドリカルレンズ28を介したライン状のレーザ光の光路上に配置されており、該レーザ光を、Z軸周りに揺動しながら反射してその反射方向を変えて、概ね+Y側に偏向する。
【0033】
レンズ群を介したライン状のレーザ光は、ガルバノミラー装置30により偏向され、筐体14aの+Y側の側壁に設けられた消去用レーザ光射出口(不図示)を介して概ね+Y側に、すなわちローラコンベアRCの例えば数cm〜数十cm上空を横切るように射出される。
【0034】
以上より、1次元レーザアレイLAから射出されたライン状のレーザ光は、レンズ群によりエネルギー密度が均質化され、かつ長さ方向(Z軸方向)に拡大され、ガルバノミラー装置30により概ね+Y側に偏向され、ローラコンベアRC上における上記消去用レーザ光射出口に対向する位置に位置する物体に照射される。この結果、物体上でライン状のレーザ光がX軸方向に走査される。
【0035】
端子台17は、システム制御装置18から出力される消去開始信号、インターロック信号、環境温度信号、エンコーダ信号などを入力するための信号入力端子と、消去準備完了信号、消去中信号、異常発生信号などをシステム制御装置18に出力するための信号出力端子とを有している。
【0036】
ここで、消去開始信号は、画像消去装置14が消去動作を開始するための信号である。インターロック信号は、消去動作を緊急停止させるための信号である。環境温度信号は、環境温度でレーザパワー(出力)を補正するための信号である。エンコーダ信号は、リライタブルラベルRL(ワーク)の移動速度を検出するための信号である。消去準備完了信号は、消去開始信号を受付可能になったことを示す信号である。消去中信号は、消去を実行していることを示す信号である。異常発生信号は、例えば1次元レーザアレイLAの異常、ガルバノミラー装置30の異常などをコントローラ21が検出したことを示す信号である。
【0037】
操作盤19は、簡易な表示器及び操作スイッチを含むユーザインターフェースであり、メニュー選択と数値入力が可能となっている。ここでは、操作盤19では、一例として、レーザ光の走査長、レーザ光の走査速度、レーザ光の走査方向、レーザパワー、消去開始ディレイ時間、ワーク速度などの消去条件などを指定可能となっている。
【0038】
コントローラ21は、消去条件設定部32、消去動作制御部34、レーザ制御部36、ガルバノ制御部38などを有する。
【0039】
消去条件設定部32は、操作盤19にてユーザが指定したレーザ光の走査長、レーザ光の走査速度、レーザ光の走査方向、レーザパワー、消去開始ディレイ時間、ワーク速度などの消去条件を設定する。
【0040】
消去動作制御部34は、端子台17からの入力信号を処理し、レーザ制御部36及びガルバノ制御部38へ指示を出すとともに、端子台17への出力信号を生成する。
【0041】
レーザ制御部36は、消去動作制御部34が指示したレーザの出力値をアナログ電圧に変換してレーザドライバ40へ出力するとともに、レーザを点灯又は消灯させるためのタイミング信号を生成する。
【0042】
レーザドライバ40は、1次元レーザアレイLAの駆動電流を生成する回路であり、レーザ制御部36からの指示値に従ってレーザパワーを制御する。
【0043】
ガルバノ制御部38は、消去動作制御部34が指示した走査開始位置から走査終了位置まで指定速度でガルバノミラー装置30の揺動ミラー30aを揺動させるためのアナログ信号を生成してガルバノドライバ42に出力する。
【0044】
ガルバノドライバ42は、ガルバノ制御部38からの指示値に従ってガルバノミラー装置30の揺動ミラー30aの揺動角度を制御する回路であり、ガルバノミラー装置30が有する角度センサからの信号とガルバノ制御部38からの指示値を比較し、その誤差が最小になるようにガルバノミラー装置30へ駆動信号を出力する。
【0045】
図1に戻り、画像記録装置16は、一例として、ローラコンベアの−Y側であって、画像消去装置14の+X側に配置されている。
【0046】
画像記録装置16は、図3に示されるように、一例として、少なくとも1つ(例えば3つ)のレーザダイオード(半導体レーザ)を含むレーザ光源LS、光学系SO2、コントローラ46、ホストコンピュータ47、これらを収容する筐体16a(図1参照)などを含む。
【0047】
レーザ光源LSは、一例として、レーザ光を−X方向に射出する。
【0048】
光学系SO2は、一例として、X軸ガルバノミラー装置48、Z軸ガルバノミラー装置50及びfθレンズ53を有している。
【0049】
X軸ガルバノミラー装置48は、その揺動ミラー48aがY軸周りに揺動する点を除いて、前述したガルバノミラー装置30と同様の構成を有している。
【0050】
X軸ガルバノミラー装置48は、一例として、その揺動ミラー48aがレーザ光源LSから射出されたレーザ光の光路上に配置されており、該レーザ光を概ね−Z側に偏向する。
【0051】
Z軸ガルバノミラー装置50は、その揺動ミラー50aがX軸周りに揺動する点を除いて、前述したガルバノミラー装置30と同様の構成を有している。
【0052】
Z軸ガルバノミラー装置50は、一例として、その揺動ミラー50aがX軸ガルバノミラー装置48により偏向されたレーザ光の光路上に配置されており、該レーザ光を概ね+Y側に偏向する。
【0053】
fθレンズ53は、一例として、Z軸ガルバノミラー装置50により偏向されたレーザ光の光路上に配置されており、該レーザ光をその+Y側に位置する物体上に集光するとともに、X軸及びZ軸ガルバノミラー装置48、50の揺動ミラーの揺動位置と物体上に形成される光スポットの変位が比例するような補正を行う。
【0054】
fθレンズ53を介したレーザ光は、筐体16aの+Y側の側壁に設けられた記録用レーザ光射出口(不図示)を介して概ね+Y側に、すなわちローラコンベアRCの例えば数cm〜数十cm上空を横切るように射出される。
【0055】
以上より、レーザ光源LSから射出された光は、X軸及びZ軸ガルバノミラー装置48、50により順次偏向され、fθレンズ53を介してローラコンベアRC上における記録用レーザ光射出口に対向する位置に位置する物体に照射される。この結果、物体上で光スポットがX軸及びZ軸の2次元方向に走査される。
【0056】
コントローラ46は、ホストコンピュータ47から出力された画像情報に基づいて、線分で形成される描画データを生成し、X軸及びZ軸ガルバノミラー装置48、50における揺動ミラーの揺動位置、レーザダイオードの発光タイミング、発光パワーを制御し、記録対象物に画像を記録(形成)する。ここでは、一例として、約0.25mmの記録線幅で、文字、数字、図形、バーコードなどの画像が記録される。
【0057】
コントローラ46は、X軸サーボドライバ52を介してX軸ガルバノミラー48を制御するとともに、Z軸サーボドライバ54を介してZ軸ガルバノミラー50を制御する。
【0058】
X軸サーボドライバ52は、コントローラ46からの指示値に従ってX軸ガルバノミラー48の揺動ミラー48aの揺動位置を制御する回路であり、X軸ガルバノミラー48の角度センサの信号とコントローラ46からの指示値とを比較し、その誤差が最小になるようにX軸ガルバノミラー48に駆動信号を出力する。
【0059】
同様に、Z軸サーボドライバ54は、コントローラ46からの指示値に従ってZ軸ガルバノミラー50の揺動ミラー50aの揺動位置を制御する回路であり、Z軸ガルバノミラー50の角度センサの信号とコントローラ46からの指示値とを比較し、その誤差が最小になるようにZ軸ガルバノミラー50に駆動信号を出力する。
【0060】
以下に、リライタブルラベルにおける画像記録及び画像消去のメカニズムを説明する。
【0061】
この画像記録及び画像消去のメカニズムは、熱により色調が可逆的に変化する態様である。この態様はロイコ染料及び可逆性顕色剤(以下、「顕色剤」と称することがある)からなり、色調が透明状態と発色状態とに熱により可逆的に変化する。
【0062】
図5(A)には、樹脂中にロイコ染料及び顕色剤を含んでなる熱可逆記録層を有する熱可逆記録媒体について、その温度−発色濃度変化曲線の一例が示され、図5(B)には、消色状態と発色状態とが熱により可逆的に変化する熱可逆記録媒体の発消色メカニズムが示されている。
【0063】
まず、初め消色状態(A)にある熱可逆記録層を昇温していくと、溶融温度T1にて、ロイコ染料と顕色剤とが溶融混合し、発色が生じ溶融発色状態(B)となる。溶融発色状態(B)から急冷すると、発色状態のまま室温に下げることができ、発色状態が安定化されて固定された発色状態(C)となる。
【0064】
この発色状態が得られたかどうかは、溶融状態からの降温速度に依存しており、徐冷では降温の過程で消色が生じ、初期と同じ消色状態(A)、あるいは急冷による発色状態(C)よりも相対的に濃度の低い状態となる。
【0065】
一方、発色状態(C)から再び昇温していくと、発色温度よりも低い温度T2にて消色が生じ(DからE)、この状態から降温すると、初期と同じ消色状態(A)に戻る。
【0066】
溶融状態から急冷して得た発色状態(C)は、前記ロイコ染料と前記顕色剤とが分子同士で接触反応し得る状態で混合された状態であり、これは固体状態を形成していることが多い。この状態では、前記ロイコ染料と前記顕色剤との溶融混合物(前記発色混合物)が結晶化して発色を保持した状態であり、この構造の形成により発色が安定化していると考えられる。
【0067】
一方、消色状態は、両者が相分離した状態である。この状態は、少なくとも一方の化合物の分子が集合してドメインを形成したり、結晶化した状態であり、凝集あるいは結晶化することにより前記ロイコ染料と前記顕色剤とが分離して安定化した状態であると考えられる。多くの場合、このように、両者が相分離して前記顕色剤が結晶化することにより、より完全な消色が生じる。
【0068】
なお、図5(A)に示される、溶融状態から徐冷による消色、及び発色状態からの昇温による消色はいずれもT2で凝集構造が変化し、相分離や前記顕色剤の結晶化が生じている。
【0069】
更に、図5(A)において、前記記録層を溶融温度T1以上の温度T3に繰返し昇温すると消去温度に加熱しても消去できない消去不良が発生したりする場合がある。これは、前記顕色剤が熱分解を起こし、凝集あるいは結晶化しにくくなってロイコ染料と分離しにくくなるためと思われる。繰返しによる前記熱可逆記録媒体の劣化を抑えるためには、前記熱可逆記録媒体を加熱する際に、図5(A)の前記溶融温度T1と前記温度T3の差を小さくすることにより、繰返しによる前記熱可逆記録媒体の劣化を抑えられる。
【0070】
次に、レーザ光照射システム100の動作の一例を、図6(A)〜図6(F)を参照して説明する。なお、以下に説明する動作は、システム制御装置18により統括的に制御される。ホストコンピュータ47に内蔵された図示しないメモリには、リライタブルラベルRLに記録すべき画像の情報、すなわち現にコンテナCに収容されている荷物の内容、輸送先の情報、リライタブルラベルRLの使用回数などのデータが格納されているものとする。
【0071】
そして、ローラコンベアRCにおけるセンサ12よりも−X側に位置する部分上には、リライタブルラベルRLが貼付され、荷物が収容された例えばN個(N≧4)のコンテナCが、作業者によりX軸方向に並べて載置されている。
【0072】
ここで、コンテナCは、リライタブルラベルRLが貼付されている側面が、−Y側に位置するように、すなわち画像消去装置14及び画像記録装置16それぞれのレーザ光射出口に対向し得るようにローラコンベアRC上に載置されることになっている。なお、図6(A)〜図6(F)では、図示の制約上、ローラコンベアRCのX軸方向中央部のみが図示されている。
【0073】
以下、便宜上、ローラコンベアRC上に載置されたN個のコンテナCを、+X側から−X側への並び順に、それぞれ第1コンテナC1〜第NコンテナCNとも称する。
【0074】
そこで、先ず、作業者は、システム制御装置18の操作パネル(不図示)を操作して、システム制御装置18に搬送開始信号を送信する。
【0075】
搬送開始信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を開始する。これにより、N個のコンテナCは、ローラコンベアRC上を+X方向に搬送される。
【0076】
ここで、システム制御装置18は、第1コンテナC1がセンサ12の+Y側、すなわちセンサ12に正対する位置(以下、検出位置と称する)に差し掛かったときに(図6(A)参照)、センサ12による検出結果を取得する(センサ12からの検出信号又は非検出信号を受信する)。同様に、システム制御装置18は、後続のコンテナCが検出位置に差し掛かったときにも、センサ12による検出結果を取得する。
【0077】
そして、システム制御装置18は、センサ12から検出信号を受信した場合には、検出されたリライタブルラベルRLに対して画像の書き換え、すなわち画像消去及び画像記録を行うことを決定し、センサ12から非検出信号を受信した場合には、ただちにローラコンベアRCの駆動を停止する。
【0078】
ここでは、図6(A)から分かるように、第1コンテナC1の−Y側の側面にリライタブルラベルRLが貼付されているため、センサ12によりリライタブルラベルRLが検出され、システム制御装置18に検出信号が出力される。検出信号を受信したシステム制御装置18は、第1コンテナC1のリライタブルラベルRLに対して画像の書き換えを行うことを決定する。
【0079】
そして、システム制御装置18は、第1コンテナC1が、画像消去装置14の+Y側、すなわち画像消去装置14の消去用レーザ光射出口に正対する位置(以下、消去位置と称する)に位置したとき、ローラコンベアRCの駆動を停止する(図6(B)参照)。なお、システム制御装置18は、例えばセンサ12からの検出信号を受信した時点からのローラコンベアRCによるコンテナCの搬送距離が検出位置と消去位置との距離に等しくなったときに、ローラコンベアRCを停止させることにより、コンテナCを消去位置で停止させることとしている。
【0080】
第1コンテナC1が消去位置に位置しているとき、第2コンテナC2が検出位置に位置しており、センサ12による検出結果がシステム制御装置18に送信される。この場合、図6(B)から分かるように、第2コンテナC2の−Y側の側面には、リライタブルラベルRLが貼付されているため、センサ12からシステム制御装置18に検出信号が出力され、第2コンテナC2のリライタブルラベルRLに対しても画像の書き換えを行うことが決定される。
【0081】
また、ローラコンベアRCの駆動が停止されたとき、システム制御装置18から画像消去装置14に消去開始信号が出力される。
【0082】
消去開始信号を受信した画像消去装置14は、Z軸方向に延びるライン状(例えば長さ60mm、幅0.5mm)のレーザ光で第1コンテナに貼付されているリライタブルラベルRLをX軸方向に所定速度で所定時間走査し、該リライタブルラベルRLに記録された画像を消去する。すなわち、画像消去装置14は、リライタブルラベルRLに消去パワー(所定パワー以上のパワー)のレーザ光を照射することで、該リライタブルラベルRLに記録されている画像を非接触で消去する。
【0083】
この消去動作が終了したとき、画像消去装置14は、システム制御装置18に消去終了信号を出力する。
【0084】
消去終了信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を再開し(図6(C)参照)、第1コンテナC1が、画像記録装置16の+Y側の位置、すなわち画像記録装置16の記録用レーザ光射出口に正対する位置(以下、記録位置と称する)に位置したときに、ローラコンベアRCの駆動を停止する(図6(D)参照)。
【0085】
そして、システム制御装置18から画像記録装置16に記録開始信号が出力される。
【0086】
記録開始信号を受信した画像記録装置16は、第1コンテナC1に貼付されているリライタブルラベルRLをスポット状のレーザ光でX軸及びZ軸の2次元方向に走査して、一筆書きの要領で該リライタブルラベルRLに所定の画像を記録する。すなわち、画像記録装置16は、リライタブルラベルRLに記録パワー(所定パワー以上のパワー)のレーザ光を照射することで、該リライタブルラベルRLに新たな画像を非接触で記録する。
【0087】
この画像記録動作が終了したとき、画像記録装置16は、システム制御装置18に記録終了信号を送信する。
【0088】
記録終了信号を受信したシステム制御装置18は、ローラコンベアRCの駆動を再開する(図6(E)参照)。
【0089】
このとき、第3コンテナC3が検出位置に差し掛かり、センサ12による検出結果がシステム制御装置18に出力される。この場合、図6(E)から分かるように、第3コンテナC3の−Y側の側面には、リライタブルラベルRLが貼付されていないため、センサ12からシステム制御装置18に非検出信号が出力され、ローラコンベアRCの駆動がただちに停止される(図6(F)参照)。なお、図6(E)から分かるように、第3コンテナC3の+Y側の側面には、リライタブルラベルRLが貼付されている。ここで、「コンテナCの+Y側の側面」とは、コンテナCにおけるY軸方向に対向する一対の側面のうち、+Y側に位置する側面を意味する。
【0090】
そして、システム制御装置18は、図示は省略されているが、例えば、その操作パネルの表示画面にて異常発生通知を表示すること、内蔵する音出力装置により警報音(音声を含む)を放出すること、その筐体に取り付けられた警報ランプを点灯(点滅を含む)することなどの異常発生通知を行う。
【0091】
これに応じて、作業者は、ローラコンベアRC上から第3コンテナC3を撤去した後、システム制御装置18の操作パネルを操作して、ローラコンベアRCの駆動を再開する。
【0092】
以後、第1コンテナC1は、次の工程(例えば輸送準備工程)に送られ、第2コンテナC2は、第1コンテナC1と同様に、画像が書き換えられた後、次の工程に送られる。第4コンテナC4〜第NコンテナCNは、第1コンテナC1〜第3コンテナC3と同様に、センサ12からの検出結果に基づいて、すなわち−Y側の側面にリライタブルラベルRLが貼付されているか否かに応じて、画像が書き換えられた後、次の工程に送られるか、又はローラコンベアRC上で停止された後、作業者により撤去される。
【0093】
なお、画像消去装置14及び画像記録装置16は、システム制御装置18により独立して制御される。従って、一のコンテナCが記録位置に位置すると同時に他のコンテナCが消去位置に位置する場合には、一のコンテナCのリライタブルラベルRLに対する記録動作と、他のコンテナCのリライタブルラベルRLに対する消去動作とが並行して行われる。
【0094】
また、一のコンテナCのリライタブルラベルRLに対する消去動作中又は記録動作中に、システム制御装置18がセンサ12から非検出信号を受信した場合にも、上述した異常発生通知が行われるが、消去動作及び記録動作が中断されることはない。この場合、既にローラコンベアRCの駆動が停止されているため、そのまま停止状態が維持され、作業者による他のコンテナCの撤去作業が行われる。
【0095】
また、撤去されたコンテナCのうち、リライタブルラベルRLが−Y側の側面以外の側面に貼付されているものは、そのリライタブルラベルRLが貼付された側面が−Y側を向くようにローラコンベアRCにおける検出位置よりも搬送方向上流側の位置に改めて載置すれば良い。また、撤去されたコンテナCのうち、リライタブルラベルRLが貼付されていないもの(例えばリライタブルラベルRLが元々貼付されていないもの、リライタブルラベルRLが剥がれ落ちてしまったものなど)は、リライタブルラベルRLを側面に貼付した後、そのリライタブルラベルRLが貼付された側面が−Y側を向くようにローラコンベアRCにおける検出位置よりも搬送方向上流側の位置に改めて載置すれば良い。
【0096】
ところで、一般に、画像消去装置及び画像記録装置それぞれから射出されるレーザ光は、強力であり、コンテナに照射されると、図7(A)に示されるように、照射された部分は、溶ける、穴があく、焦げるなどのダメージ(損傷)を受けてしまう。
【0097】
また、コンテナが、例えばメッシュ構造体(図7(B)参照)、透明体などである場合、レーザ光がコンテナを通過し、コンテナ自体がダメージを受けるだけでなく、その内容物(荷物)にもダメージが及んでしまう。
【0098】
そこで、近年、レーザ光がリライタブルラベルから外れないように、画像消去装置又は画像記録装置のレーザ光射出口に対してコンテナを精度良く搬送及び位置決めできるコンベア装置が導入されている。
【0099】
しかしながら、コンテナに貼付されたリライタブルラベルが剥がれている場合、元々コンテナにリライタブルラベルが貼付されていない場合、作業者による置き間違いによりコンテナにおける上記レーザ光射出口に正対し得る部分以外の部分にリライタブルラベルが貼付されている場合などが想定される。
【0100】
これらの場合に、画像消去装置及び画像記録装置からコンテナに向けて所定パワー以上のレーザ光を射出すれば、コンテナ及びその内容物にダメージを与えることは、必至である。
【0101】
ここで、本明細書中、「所定パワー」は、コンテナ及びその内容物にダメージを与える最小のパワー(出力)を意味する。例えば、上記消去パワー及び記録パワーは、所定パワー以上のパワーであり、これらのパワーのレーザ光がコンテナCに照射されれば、コンテナC及びその内容物にダメージを与えてしまう。一方、所定パワー未満のパワーのレーザ光がコンテナに照射されても、コンテナC及びその内容物にほとんどダメージを与えない。
【0102】
本実施形態のレーザ光照射システム100は、コンテナCをX軸方向に搬送するローラコンベアRCを含むコンベア装置10と、ローラコンベアRC上における検出位置(特定位置)に搬送されたコンテナCの−Y側の側面におけるリライタブルラベルRLの有無を検出するセンサ12と、ローラコンベアRC上における検出位置の+X側の消去位置(所定位置)に搬送されたコンテナCの−Y側の側面に向けてレーザ光を射出可能な画像消去装置14と、ローラコンベアRC上における消去位置の+X側の記録位置(所定位置)に搬送されたコンテナCの−Y側の側面に向けてレーザ光を射出可能な画像記録装置16と、コンベア装置10、画像消去装置14及び画像記録装置16を制御するシステム制御装置18とを備えている。
【0103】
そして、システム制御装置18は、コンテナCを検出位置に搬送し、センサ12によりリライタブルラベルRLが検出されない場合には、画像消去装置14及び画像記録装置16から所定パワー以上のレーザ光を射出させない。
【0104】
この結果、コンテナCに所定パワー以上のレーザ光が照射されることを防止でき、ひいてはコンテナC及びその内容物の損傷を防止することができる。
【0105】
特に、本実施形態では、システム制御装置18は、センサ12によりリライタブルラベルRLが検出されない場合には、ローラコンベアRCの駆動をただちに停止する。
【0106】
この場合、作業者により、コンテナCをローラコンベアRC上から撤去する必要があるが、そのコンテナCに作業者がアクセスすることで、そのコンテナCの状況(リライタブルラベルRLの有無、位置など)を早々知ることができ、そのコンテナCの再搬送の準備にいち早く着手することができる。
【0107】
また、システム制御装置18は、センサ12によりリライタブルラベルRLが検出された場合には、コンテナCを消去位置に搬送して画像消去装置から所定パワー以上のレーザ光を射出させてリライタブルラベルRLに記録された画像を消去し、コンテナCを記録位置に搬送して画像記録装置16から所定パワー以上のレーザ光を射出させてリライタブルラベルRLに新たな画像を記録する。
【0108】
この結果、コンテナCの−Y側の側面に貼付されているリライタブルラベルRLに対して画像の書き換えを行うことができる。
【0109】
また、リライタブルラベルRLに対する画像の書き換えを、画像消去専用の画像消去装置14と画像記録専用の画像記録装置16とを用いて行うので、画像消去及び画像記録を、それぞれ高速かつ高精度に行うことができる。
【0110】
次に、本発明の第2の実施形態を、図8(A)〜図8(F)、図9を参照して説明する。第2の実施形態では、上記第1の実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第1の実施形態と異なる点を主に説明する。
【0111】
第2の実施形態に係るレーザ光照射システムでは、コンベア装置は、図8(A)に示されるように、ローラコンベアRCにおける検出位置と消去位置との間の部分に接続された分岐搬送路としての分岐コンベアBCを有している。
【0112】
分岐コンベアBCは、Y軸方向に並べて配置されたX軸方向を軸線方向とする複数のローラ9で構成され(図9参照)、ローラコンベアRCに対して角度(例えば直角)を成すように配置され、コンテナCをY軸方向(+Y方向)に搬送可能である。複数のローラ9は、それぞれX軸周りに回転可能な状態で不図示の支持架台に支持されている。ここでは、一例として、複数のローラ9それぞれの最上面部(外周面における最も+Z側に位置する部分)は、複数のローラ11それぞれの最上面部と概ね同一水平面上に位置している。なお、図8(A)〜図8(F)、図9では、図示の制約上、分岐コンベアBCの一部のみが図示されている。
【0113】
分岐コンベアBCは、ローラコンベアRCと同様に、平ベルト装置を介してシステム制御装置により駆動制御される。
【0114】
また、ローラコンベアRCにおける分岐コンベアBCとの接続部分CPは、コンテナCをX軸又はY軸方向に搬送可能な構成を有している。
【0115】
詳述すると、接続部分CPは、図9に示されるように、Y軸方向に延び、X軸方向に所定間隔で並べて配置された複数の第1回転軸60と、該複数の第1回転軸60それぞれにY軸方向に並べて同軸に固定された小型の複数の第1ローラ部62と、X軸方向に延び、複数の第1回転軸60の直下にY軸方向に並べて配置された複数の第2回転軸64と、該複数の第2回転軸64それぞれにX軸方向に並べて同軸に固定された小型の複数の第2ローラ部66とを有している。
【0116】
すなわち、上記接続部分CPでは、+Z方向から見て、複数の第1及び第2回転軸60、64が格子状に配置されており、その格子のY軸方向に隣り合う交点間に第1ローラ部62が配置され、その格子のX軸方向に隣り合う交点間に第2ローラ部66が配置されている。
【0117】
第1及び第2ローラ部62、66の外径、並びに第1及び第2回転軸60、64の高さ(Z軸方向に関する位置)は、一例として、第1及び第2ローラ部62、66の最上面部(外周面における最も+Z側に位置する部分)が複数のローラ11及び複数のローラ9の最上面部と概ね同一水平面上に位置するように設定されている。これにより、ローラコンベアRCと分岐コンベアBCとの間での、コンテナCの受け渡しをスムーズに行うことができる。
【0118】
また、隣り合う2つの第1回転軸60には、無端ベルト(不図示)が架け渡されており、複数の第1回転軸60のうちの1つが第1モータ(不図示)により駆動されることにより、これに同期して他の第1回転軸60が回転し、複数の第2回転軸64のうちの1つが第2モータ(不図示)により駆動されることにより、これに同期して他の第2回転軸64が回転するようになっている。第1及び第2モータは、システム制御装置18により個別に制御される。
【0119】
以上より、システム制御装置18は、モータ13b及び第1モータを駆動させることで、複数のローラ11及び複数の第1ローラ部62を回転させて、コンテナCを検出位置から消去位置に搬送することができる。このとき、コンテナCは、接続部分CP上にて、Y軸周りに回転する複数の第1ローラ部62との間で作用する摩擦力により、回転していない複数の第2ローラ部66上を滑りながら+X方向に移動される。
【0120】
一方、システム制御装置18は、モータ13b及び第2モータを駆動させることで、複数のローラ11及び複数の第2ローラ部66を回転させて、コンテナCを検出位置から分岐コンベアBCに搬送することができる。このとき、コンテナCは、接続部分CP上にて、X軸周りに回転する複数の第2ローラ部66との間で作用する摩擦力により、回転していない複数の第1ローラ部62上を滑りながら+Y方向に移動される。
【0121】
第2の実施形態では、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対する画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合に、−Y側の側面にリライタブルRLが貼付されていないコンテナCをローラコンベアRCから分岐コンベアBCに向けて搬送する。
【0122】
以下に、第2の実施形態に係るレーザ光照射システムの動作の一例を、図8(A)〜図8(F)を参照して説明する。先ず、上記第1の実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0123】
図8(A)では、−Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が、検出位置を通過して消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が、検出位置に向けて搬送される。
【0124】
そして、第1コンテナC1が、消去位置に位置したときに、ローラコンベアRCの駆動が停止され、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作が行われる(図8(B)参照)。
【0125】
次いで、ローラコンベアRCの駆動が再開され、第1コンテナC1が記録位置に向けて搬送され、第2コンテナC2が消去位置に向けて搬送され、+Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3が検出位置に向けて搬送される(図8(C)参照)。
【0126】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動が停止され、第3コンテナC3が検出位置に位置する(図8(D)参照)。
【0127】
このとき、システム制御装置は、センサ12から非検出信号を受信し、第3コンテナC3を分岐コンベアBCに向けて搬送することを決定する。
【0128】
そして、システム制御装置は、ローラコンベアRCの駆動を再開するとともに、第3コンテナC3が分岐コンベアBCに向けて搬送されるように、接続部分CPを駆動制御する(図8(E)参照)。
【0129】
システム制御装置は、分岐コンベアBCに第3コンテナC3が搬送された(図8(F)参照)後、第1コンテナC1〜第3コンテナC3の場合と同様に、センサ12からの検出結果に基づいて、後続する第4コンテナC4〜第NコンテナCNそれぞれに対して、画像の書き換え又は分岐コンベアBCへの搬送のいずれかを行う。
【0130】
第2の実施形態によれば、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCが、ローラコンベアRCにおける検出位置と消去位置との間の部分に接続された分岐コンベアBCに搬送されるため、ローラコンベアRCの駆動を停止することなく、コンテナCに所定パワー以上のレーザ光が照射されることを防止できる。
【0131】
すなわち、画像の書き換え効率(スループット)の低下を防止しつつ、コンテナC及びその内容物の損傷を防止できる。
【0132】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0133】
次に、本発明の第3の実施形態を、図10(A)〜図10(G)を参照して説明する。第3の実施形態では、上記第1及び第2の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第1の実施形態と異なる点を主に説明する。
【0134】
第3の実施形態では、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対する画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合に、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCに対して消去動作及び記録動作を行わず、すなわち画像消去装置14及び画像記録装置16からレーザ光を射出させず、そのコンテナCが記録位置の+X側の所定位置(停止位置)に位置したときに、ローラコンベアRCの駆動を停止する。
【0135】
以下に、第3の実施形態に係るレーザ光照射システムの動作の一例を、図10(A)〜図10(G)を参照して説明する。先ず、上記第1及び第2の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0136】
図10(A)では、−Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が検出位置を通過し、消去位置に向けて搬送され、+Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が検出位置に差し掛かっている。
【0137】
このとき、システム制御装置は、センサ12から非検出信号を受信し、第2コンテナC2に対して記録動作及び消去動作を行わないこと、すなわち第2コンテナC2を消去位置及び記録位置で停止させず、かつ第2コンテナC2に対して画像消去装置14及び画像記録装置16からレーザ光を射出させないことを決定する。
【0138】
そして、第1コンテナC1が消去位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(B)参照)。このとき、第2コンテナC2は、検出位置と消去位置との間に位置し、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3が検出位置の−X側に位置している。
【0139】
そこで、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作が行われた後、ローラコンベアRCが駆動され、第1コンテナC1は、記録位置に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、第3コンテナC3は、検出位置に向けて搬送される(図10(C)参照)。
【0140】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(D)参照)。このとき、第2コンテナC2は、消去位置の−X側近傍に位置し、第3コンテナC3は、検出位置の−X側近傍に位置する。
【0141】
そこで、第1コンテナC1に貼付されているリライタブルラベルRLに対する記録動作が行われた後、ローラコンベアRCが駆動され、第1コンテナC1は、次の工程に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、第3コンテナC3は、検出位置に差し掛かる(図10(E)参照)。
【0142】
そして、第2コンテナC2が、消去位置を通過(素通り)し(図10(F)参照)、記録位置を通過(素通り)し、記録位置の+X側の停止位置に位置したときに、ローラコンベアRCの駆動が停止される(図10(G)参照)。このとき、第3コンテナC3は、消去位置の−X側近傍に位置し、−Y側の側面にリライタブルラベルRLが貼付されている第4コンテナC4は、検出位置に位置している。
【0143】
そこで、システム制御装置は、上記第1の実施形態と同様に、異常発生通知の表示、警報音の発生、警報ランプの点灯などを行う。これに応じて、作業者は、第2コンテナC2の撤去を行った後、システム制御装置の操作パネルを操作して、ローラコンベアRCの駆動を再開する。
【0144】
以後、第3コンテナC3〜第NコンテナCNは、第1コンテナC1と同様に、画像の書き換えが行われた後、次の工程に向けて搬送されるか、又は第2コンテナC2と同様に、ローラコンベアRC上における停止位置で停止された後、作業者により撤去される。
【0145】
第3の実施形態によれば、システム制御装置は、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCに対して消去動作及び記録動作を行わないので、すなわち画像の書き換えに関与しないので、そのコンテナCに所定パワー以上のレーザ光が照射されることが防止される。この結果、そのコンテナC及びその内容物の損傷が防止される。
【0146】
すなわち、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCは、コンテナCは消去位置及び記録位置を素通りする。この結果、−Y側の側面にリライタブルラベルRLが貼付されているコンテナC全て、すなわち画像の書き換えが可能なコンテナC全てに対する画像の書き換え効率(スループット)の低下が抑制される。
【0147】
第3の実施形態では、特に、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCを、記録位置の+X側の所定の停止位置で停止させ、そのコンテナCを作業者により撤去させることとしているので、作業者は、そのコンテナCの状況(リライタブルラベルRLの位置、有無など)を早々に知ることができ、その再搬送準備にいち早く着手することができる。
【0148】
次に、本発明の第4の実施形態を、図11(A)〜図11(G)を参照して説明する。第4の実施形態では、上記第1〜第3の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第3の実施形態と異なる点を主に説明する。
【0149】
第4の実施形態では、図11(A)に示されるように、上記第2の実施形態と同様の構成を有する分岐コンベアBCが、ローラコンベアRCにおける記録位置の+X側の部分に接続されている。
【0150】
そして、ローラコンベアRCにおける記録位置の+X側近傍に位置するコンテナCを分岐コンベアBCに導くことができるようになっている。
【0151】
以下に、第4の実施形態に係るレーザ光照射システムの動作の一例を、図11(A)〜図11(G)を参照して簡単に説明する。先ず、上記第1〜第3の実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0152】
以後、上記第3の実施形態と同様の動作が行われ(図11(A)〜図11(E)参照)、+Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が消去位置及び記録位置を順次通過(素通り)した後、システム制御装置は、第2コンテナC2を分岐コンベアBCに向けて搬送する(図11(F)参照)。これと並行して、ローラコンベアRCの駆動は継続されており、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3及び第4コンテナC4は、順次消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第5コンテナC5は、検出位置に向けて搬送される(図11(G)参照)。
【0153】
以後、第3コンテナC3〜第NコンテナCNは、第1コンテナC1と同様に、画像の書き換えが行われた後、次の工程に向けて搬送されるか、又は第2コンテナC2と同様に、分岐コンベアBCに向けて搬送される。
【0154】
第4の実施形態によれば、画像の書き換えが行われないコンテナCは消去位置及び記録位置を通過(素通り)した後に分岐コンベアBCに搬送されるとともに、ローラコンベアRCの駆動が停止されない(継続される)ので、画像の書き換えが行われる他のコンテナC全てに対する画像の書き換え効率(スループット)の低下を防止できる。
【0155】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0156】
次に、本発明の第5の実施形態を、図12(A)〜図14(H)を参照して説明する。第5の実施形態では、上記第1〜第4の各実施形態と同様の構成を有する部材等には、同一の符号を付して、その説明を省略し、上記第4の実施形態と異なる点を主に説明する。
【0157】
第5の実施形態のコンベア装置では、図12(A)に示されるように、上記第4の実施形態に比べて、ローラコンベアRCにおける検出位置に対応する部分を、Z軸周りに回転させる回転機構500を有している点が異なる。
【0158】
すなわち、回転機構500は、図13に示されるように、一例として、ローラコンベアRCにおける検出位置に対応する部分(複数のローラ11)を外側から回転可能に支持するZ軸方向を軸線方向とする円環状の支持部材500aと、該支持部材500aをZ軸周りに回転駆動するモータ等を含む駆動装置(不図示)とを有している。この駆動装置は、システム制御装置により制御される。
【0159】
システム制御装置は、センサ12から非検出信号を受信した場合、ローラコンベアRCの駆動をただちに停止して、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCを検出位置に位置させた状態で、回転機構500を制御し、そのコンテナCをZ軸周りに180°回転させる。このとき、センサ12は、そのコンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無を検出する。
【0160】
一方、システム制御装置は、センサ12から検出信号を受信した場合に、上記第1〜第4の各実施形態と同様に、そのコンテナCを検出位置で停止させない(素通りさせる)。
【0161】
そこで、システム制御装置は、センサ12から検出信号を受信した場合に、検出されたリライタブルラベルRLに対して画像の書き換えを行うことを決定し、センサ12から非検出信号を受信した場合、リライタブルラベルRLが−Y側の側面に貼付されていないコンテナCに対する画像の書き換えを行わないことを決定する。
【0162】
以下に、第5の実施形態に係るレーザ光照射システムの動作の具体例(その1)を、図12(A)〜図12(H)を参照して簡単に説明する。先ず、上記第1〜第4の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0163】
図12(A)では、+Y側の側面にリライタブルラベルRLが貼付されている第1コンテナC1が検出位置に向けて搬送されている。
【0164】
そして、第1コンテナC1が検出位置に差し掛かったとき(図12(B)参照)、システム制御装置は、センサ12から非検出信号を受信し、ローラコンベアRCの駆動をただちに停止して第1コンテナC1を検出位置に位置させ、回転機構500を制御して、第1コンテナC1をZ軸周りに180°回転させる(図12(C)参照)。
【0165】
このとき、第1コンテナC1におけるリライタブルラベルRLが貼付されている元の+Y側の側面が−Y側の側面となり、リライタブルラベルRLが貼付されていない元の−Y側の側面が+Y側の側面となる。
【0166】
そこで、センサ12は、リライタブルラベルRLを検出し、システム制御装置に検出信号を出力する。検出信号を受信したシステム制御装置は、第1コンテナC1の−Y側の側面に貼付されているリライタブルラベルRLに対して画像の書き換えを行うことを決定し、ローラコンベアRCの駆動を再開する。これにより、第1コンテナC1が、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が、検出位置に向けて搬送される(図12(D)参照)。
【0167】
そして、第2コンテナC2が検出位置に差し掛かったときに、システム制御装置は、センサ12から検出信号を受信し、第2コンテナC2をそのまま素通りさせ、第1コンテナC1が消去位置に位置したときにローラコンベアRCの駆動を停止する(図12(E)参照)。
【0168】
そこで、システム制御装置は、第1コンテナC1に貼付されているリライタブルラベルRLに対する消去動作を行った後に、ローラコンベアRCの駆動を再開する(図12(F)参照)。
【0169】
そして、第1コンテナC1が記録位置に位置したときに、ローラコンベアRCの駆動を停止し、第1コンテナC1に貼付されているリライタブルラベルRLに対する記録動作を行う(図12(G)参照)。
【0170】
第1コンテナC1に対する記録動作が行われた後、ローラコンベアRCの駆動が再開され、第1コンテナC1は、次の工程に向けて搬送され、第2コンテナC2は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されているコンテナC3が検出位置に向けて搬送される(図12(H)参照)。
【0171】
以後、第2コンテナC2〜第NコンテナCNのうち、+Y側の側面にリライタブルラベルRLが貼付されているものは、第1コンテナC1と同様に、検出位置で向きが変えられた後、画像の書き換えが行われ、次の工程に向けて搬送される。一方、第2コンテナC2〜第NコンテナCNのうち、−Y側の側面にリライタブルラベルRLが貼付されているものは、画像の書き換えが行われた後、次の工程に向けて搬送される。
【0172】
以下に、第5の実施形態に係るレーザ光照射システムの動作の具体例(その2)を、図14(A)〜図14(H)を参照して簡単に説明する。先ず、上記第1〜第4の各実施形態と同様に、作業者により、システム制御装置の操作パネルが操作されて、N個のコンテナCの搬送が開始される。
【0173】
図14(A)では、リライタブルラベルRLが貼付されていない第1コンテナC1が検出位置に向けて搬送されている。
【0174】
そして、第1コンテナC1が検出位置に差し掛かったとき、センサ12からシステム制御装置に非検出信号が出力され、ローラコンベアRCの駆動が停止され、第1コンテナC1は、検出位置にて、回転機構500により、Z軸周りに180°回転される(図14(B)参照)。
【0175】
そこで、センサ12からシステム制御装置に非検出信号が出力され、第1コンテナC1に対し、画像の書き換えを行わないことが決定される(図14(C)参照)。
【0176】
そして、ローラコンベアRCの駆動が再開され、第1コンテナC1は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第2コンテナC2が検出位置に向けて搬送される(図14(D)参照)。
【0177】
次いで、第2コンテナC2が検出位置に差し掛かったときに、センサ12からシステム制御装置に検出信号が出力され、第2コンテナC2は、検出位置をそのまま通過(素通り)し、第1コンテナC1は、消去位置を通過(素通り)する(図14(E)参照)。
【0178】
そして、第1コンテナC1は、記録位置を通過(素通り)し、第2コンテナC2は、消去位置に向けて搬送され、−Y側の側面にリライタブルラベルRLが貼付されている第3コンテナC3は、検出位置に向けて搬送される(図14(F)参照)。
【0179】
そこで、第1コンテナC1は、分岐コンベアBCに向けて搬送される(図14(G)参照)。一方、第2コンテナC2は、消去位置にて消去動作が行われた後、記録位置に向けて搬送され、第3コンテナC3は、検出位置を通過(素通り)する(図14(H)参照)。
【0180】
以後、第2コンテナC2〜第NコンテナCNのうち、リライタブルラベルRLが貼付されていないものは、第1コンテナC1と同様に、分岐コンベアBCに向けて搬送される。一方、第2コンテナC2〜第NコンテナCNのうち、−Y側の側面にリライタブルラベルRLが貼付されているものは、画像の書き換えが行われた後、次の工程に向けて搬送される。
【0181】
第5の実施形態では、検出位置に差し掛かったコンテナCの−Y側の側面にリライタブルラベルRLが貼付されている場合に、そのコンテナCをそのまま通過させて、画像の書き換えを行う。
【0182】
一方、検出位置に差し掛かったコンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合に、そのコンテナCが検出位置にてZ軸周りに180°回転されて、コンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無がセンサ12により検出される。
【0183】
そして、リライタブルラベルRLが検出された場合、そのコンテナCに対して画像の書き換えを行うことが決定される。一方、リライタブルラベルRLが検出されない場合、そのコンテナCに対して画像の書き換えを行わないことが決定され、そのコンテナCは、消去位置及び記録位置を通過(素通り)した後に、分岐コンベアBCに搬送される。
【0184】
この結果、コンテナCの元の(回転前の)−Y側の側面にリライタブルラベルRLが貼付されていなくても、元の(回転前の)+Y側の側面にリライタブルラベルRLが貼付されている場合には、そのリライタブルラベルRLに対して画像の書き換えを自動的に行うことができる。
【0185】
すなわち、例えば、作業者によるコンテナCの置き間違いにより、元の+Y側の側面にリライタブルラベルRLが貼付されているコンテナCがローラコンベアRC上に載置されている場合であっても、そのコンテナCを再搬送する必要がない。
【0186】
また、画像の書き換えが行われないコンテナCを撤去する必要がないので、人手を要しない。
【0187】
なお、第5の実施形態では、分岐コンベアBCを設けなくても良い。この場合、コンテナCの+Y側及び−Y側の側面にリライタブルラベルRLが貼付されていないときに、上記第1又は第3の実施形態と同様に、ローラコンベアRCの駆動を停止して、作業者に異常発生を通知し、そのコンテナCを撤去するようにしても良い。
【0188】
また、第5の実施形態では、上記第2の実施形態と同様に、分岐コンベアBCをローラコンベアRCにおける検出位置と消去位置との間の部分に接続し、+Y側及び−Y側の側面にリライタブルラベルRLが貼付されていないコンテナCを消去位置及び記録位置を通過させることなく、分岐コンベアBCに向けて搬送することとしても良い。
【0189】
本発明は、上記実施形態に特に限定されることなく、種々の変更が可能である。
【0190】
例えば、コンテナにおけるリライタブルラベルRLの有無の検出方法として、上記第1〜第5の各実施形態におけるセンサ12による検出方法以外の様々な方法が考えられる。
【0191】
先ず、コンテナとして、例えばプラスッチック製のものを用いる場合に、上記第1〜第5の各実施形態のように、反射率の差により、リライタブルラベルの有無を検出することが困難になることが想定される。
【0192】
そこで、検出手段により検出可能な識別情報を表示するラベルを、コンテナにおけるリライタブルラベルが貼付されている面に貼付する方法が考えられる。具体的には、図15(A)に示されるように、バーコードラベルをコンテナの一側面におけるリライタブルラベルとは異なる箇所に貼付し、これをバーコードスキャナで読み取る方法が挙げられる。
【0193】
この方法は、簡単で確実な方法であるが、リライタブルラベルが剥がれ落ちてしまった場合には、対応できない。
【0194】
そこで、リライタブルラベルの中の識別情報を検出する方法が考えられる。具体的には、図15(B)に示されるように、例えばバーコードをリライタブルラベルに記録し、これをバーコードスキャナで読み取る方法が挙げられる。
【0195】
この方法は、図15(A)に示される方法のようなバーコードラベルが不要であるが、何らかの手違いによりリライタブルラベルにおけるバーコードを含む画像が消去されている場合には、対応できない。
【0196】
そこで、リライタブルラベルの上にバーコードラベルを貼る方法が考えられる。
【0197】
また、上記第1〜第5の各実施形態と同様に、検出用の識別情報が表示されたマークを用いないで、リライタブルラベルを検出する方法が考えられる。具体的には、図15(C)に示されるように、一般に、リライタブルラベルの色は白色に近く、段ボール箱の色は茶色なので、カラーセンサにより、段ボール箱におけるリライタブルラベルの有無を判別できる。
【0198】
上記第1〜第5の各実施形態では、センサ12(検出手段)として、反射型光電センサが用いられているが、これに限らず、例えば紙、プラスチック等を含む樹脂製、金属製などのコンテナの−Y側の側面におけるリライタブルラベルRLの有無を検出できれば、他のセンサであっても良い。
【0199】
上記第3〜第5の各実施形態では、画像記録装置16によりリライタブルラベルRLに記録された画像を検査(チェック)する画像検査装置を、画像記録装置16の+X側(搬送方向下流側)に配置することとしても良い。
【0200】
この画像検査装置は、一例として、コンテナCの−Y側の側面に貼付されているリライタブルラベルRLに記録された画像(以下、記録画像と称する)を撮像する電子カメラなどを有し、該電子カメラにより撮像された記録画像の画質(品質)が基準画質以上であるか否かを判定する。画像検査装置の判定結果は、システム制御装置に送信される。
【0201】
システム制御装置は、画像検査装置から記録画像の画質が基準画質以上であるという判定結果を受信した場合には、そのコンテナCを次の工程に向けて搬送する。
【0202】
一方、システム制御装置は、画像検査装置から記録画像の画質が基準画質以上でないとう判定結果を受信した場合には、ローラコンベアRCの駆動を停止するか(第3の実施形態の場合)、又はコンテナCを分岐コンベアBCに向けて搬送する(第4又は第5の実施形態の場合)。なお、画像検査装置は、コンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合には、記録画像の画質が基準画質以上でないと判定し、その判定結果をシステム制御装置に送信する。
【0203】
以上より、−Y側の側面にリライタブルラベルRLが貼付され、かつその記録画像の画質が基準画質以上であるコンテナCは、次の工程に向けて搬送される。一方、−Y側の側面にリライタブルラベルRLが貼付されていないコンテナC、及び−Y側の側面にリライタブルラベルRLが貼付され、かつその記録画像の画質が基準画質未満であるコンテナCは、搬送が停止されて作業者により撤去されるか(第3の実施形態の場合)、又は分岐コンベアBCに向けて搬送される(第4又は第5の実施形態の場合)。
【0204】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16それぞれによるリライタブルラベルRLへのレーザ光の照射は、コンテナCを停止させた状態で行なっているが、これに代えて、コンテナCを搬送しながら行っても良い。但し、画像記録装置16によりリライタブルラベルRLにレーザ光を照射する場合(画像記録を行う場合)には、ローラコンベアRCの駆動に伴いコンテナCに振動が発生することを考慮して、コンテナCを停止させた状態で行うことが好ましい。この結果、記録画像の品質低下を防止できる。
【0205】
上記第1〜第5の各実施形態では、ローラコンベアRCが用いられているが、これに限らず、例えばベルトコンベアなどのその他のコンベアを用いても良い。
【0206】
上記第1〜第5の各実施形態では、ローラコンベアRCを構成する複数のローラ11全てを同期して回転させることとしているが、これに限らず、ローラコンベアRCを、X軸方向に関して、複数のローラ11をそれぞれが含む複数のコンベア部に分割して、各コンベア部を独立して駆動させることとしても良い。
【0207】
詳述すると、各コンベア部は、一例として、X軸方向に一連に並べて配置された複数のローラ11、該複数のローラ11のうち、一のローラ11を回転駆動するモータを含む駆動装置(不図示)などを有している。各コンベア部では、隣り合う2つのローラ11に無端ベルトが巻き掛けられており、複数のローラ11のうち、一のローラ11が回転駆動されると、これに同期して他のローラ11も回転駆動されるようになっている。一方、隣り合うコンベア部の互いに隣接する2つのローラ11には、無端ベルトが巻き掛けられていない。各コンベア部は、対応する駆動装置を介してシステム制御装置18により独立に制御される。以上より、X軸方向に並べて配置された複数のコンベア部は、システム制御装置18の指示の下、コンテナCを隣り合う2つのコンベア部間で受け渡しながら+X方向に搬送可能である。
【0208】
また、複数のコンベア部は、それぞれ独立して駆動可能なので、少なくとも1つのコンベア部を駆動するとともに、他のコンベア部を停止させることができる。これにより、例えば、先行するコンテナCを消去位置に位置させて消去動作を行っているときに、後続する少なくとも1つのコンテナCを消去位置の−X側に間隔を詰めた状態で並ばせておくことができる。また、先行するコンテナCを記録位置に位置させて記録動作を行っているときに、後続する直近のコンテナCを消去位置に位置させて消去動作を行うとともにそのコンテナCに後続する少なくとも1つのコンテナCを消去位置の−X側に間隔を詰めた状態で並ばせておくことができる。この結果、画像の書き換え効率(スループット)を格段に向上することができる。
【0209】
上記第1の実施形態では、リライタブルラベルRLが+Y側の側面に貼付されているコンテナCが作業者により検出位置から撤去されているが、これに代えて、例えばそのコンテナCを検出位置において例えばZ軸周りに180°回転させてそのコンテナCの元の+Y側の面(リライタブルラベルRLが貼付されている側面)を−Y側に位置させた後、ローラコンベアRCの駆動を再開しても良い。この場合、センサ12からリライタブルラベルRLの検出信号を受信したシステム制御装置18は、そのコンテナCに対する画像の書き換えを行う。
【0210】
上記第1〜第5の各実施形態では、センサ12の検出時点を基準として、コンテナCを消去位置又は記録位置で停止させることとしているが、これに限らず、センサ12以外の専用のセンサを別途設けて、該センサの検出時点を基準として、コンテナCを消去位置又は記録位置で停止させることとしても良い。
【0211】
上記第3〜第5の各実施形態では、システム制御装置は、コンテナCの−Y側の側面にリライタブルラベルRLが貼付されていない場合、そのコンテナCを消去位置及び記録位置で停止させず、かつ画像消去装置14及び画像記録装置16からそのコンテナCに対してレーザ光を照射させないこととしているが、これに代えて、そのコンテナCを消去位置及び記録位置で順次停止させて、画像消去装置14及び画像記録装置16からコンテナCにダメージを与えない程度の、すなわち所定パワー未満のパワーのレーザ光を照射しても良い。
【0212】
この場合、センサ12の検出結果に応じてレーザの出力を調整しさえすれば、センサ12の検出結果に関わらずコンテナCを同様に動作させることができるので、制御が格段に簡単になる。
【0213】
上記第5の実施形態では、コンテナCの−Y側の側面におけるリライタブルラベルRLの有無をセンサ12により検出した後、回転機構500により該コンテナCをZ軸周りに180°回転させて該コンテナCの−Y側の側面(元の+Y側の側面)におけるリライタブルラベルRLの有無をセンサ12により再び検出することとしているが、これに限られない。具体的には、円環状の支持部材500aに外側から支持されるコンベア部を接続部分CPと同様の構成(X軸又はY軸方向に搬送可能な構成)とする。そして、コンテナCの−Y側の側面においてリライタブルラベルRLがセンサ12により検出されない場合に、そのコンベア部を例えばZ軸周りの一方向に90°ずつ回転させ、コンテナCの元の−X側、+Y側及び+X側の各側面を−Y側に位置させて、リライタブルラベルRLの有無をセンサ12により検出することとしても良い。
【0214】
この場合、リライタブルラベルRLが検出されたときには、コンテナCの総回転角度(90°、180°、270°)に関わらず、リライタブルラベルRLが貼付されている側面を−Y側に位置させた状態で、該リライタブルラベルRLに対して画像の書き換えを行うべく、該コンテナCを+X方向にそのまま搬送できる。一方、リライタブルラベルRLが検出されなかったとき、すなわちコンテナCの総回転角度が360°のときは、該コンテナCを分岐コンベアBCに搬送すべく、コンテナCを+X方向にそのまま搬送できる。
【0215】
上記第1の実施形態では、センサ12により、コンテナCの−Y側の側面においてリライタブルラベルRLが検出されなかったときに、ローラコンベアRCの駆動をただちに停止させることとしているが、これに限られず、要は、そのコンテナCが消去位置に搬送される前にローラコンベアRCの駆動を停止させることとすれば良い。
【0216】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16が別体に設けられているが、一体に設けることとしても良い。
【0217】
コンベア装置、センサ12、画像消去装置14及び画像記録装置16の位置関係は、上記第1〜第5の各実施形態で説明したものに限定されない。
【0218】
上記第1〜第5の各実施形態に係るレーザ光照射システムでは、画像が記録されているリライタブルラベルRLに対して消去動作及び記録動作を行っているが(画像の書き換えを行っているが)、これに限らず、要は、リライタブルラベルRLに対して消去動作及び記録動作の少なくとも一方を行うこととすれば良い。すなわち、画像が記録されているリライタブルラベルRLに対して消去動作のみを行うこととしても良いし、画像が記録されていないリライタブルラベルRLに対して記録動作のみを行うこととしても良い。
【0219】
上記第1〜第5の各実施形態では、レーザ光射出手段は、画像消去装置14及び画像記録装置16を有しているが、画像消去装置14及び画像記録装置16の一方のみを有していても良い。この場合、レーザ光照射システムは、リライタブルラベルRLに対する画像の消去及び記録の一方のみを行うこととなる。
【0220】
上記第1〜第5の各実施形態では、画像消去装置14及び画像記録装置16のレーザ(光源)として、半導体レーザが用いられているが、これに限らず、例えば、固体レーザ、ファイバーレーザ、CO2レーザなどを用いても良い。
【符号の説明】
【0221】
10…コンベア装置(搬送手段)、12…センサ(検出手段)、14…画像消去装置(レーザ光射出手段の一部)、16…画像記録装置(レーザ光射出手段の一部)、18…システム制御装置(制御手段)、100…レーザ光照射システム、C…コンテナ(搬送物)、RL…リライタブルラベル(熱可逆記録媒体)、RC…ローラコンベア(搬送路)。
【先行技術文献】
【特許文献】
【0222】
【特許文献1】特開2008−194905号公報
【特許請求の範囲】
【請求項1】
搬送物の一側の面に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムであって、
前記搬送物を所定の搬送方向に搬送する搬送路を含む搬送手段と、
前記搬送路上における特定位置に搬送された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出する検出手段と、
前記搬送路上における前記特定位置の前記搬送方向下流側の少なくとも1つの所定位置に搬送された前記搬送物の前記一側の面に向けてレーザ光を射出可能なレーザ光射出手段と、
前記搬送手段及び前記レーザ光射出手段を制御する制御手段とを備え、
前記制御手段は、前記搬送物を前記特定位置に搬送し、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記レーザ光射出手段から所定パワー以上のレーザ光を射出させないレーザ光照射システム。
【請求項2】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記少なくとも1つの所定位置に搬送しない請求項1に記載のレーザ光照射システム。
【請求項3】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記特定位置と前記少なくとも1つの所定位置との間で停止させることを特徴とする請求項2に記載のレーザ光照射システム。
【請求項4】
前記搬送手段は、前記搬送路における前記特定位置と前記少なくとも1つの所定位置との間で前記搬送路から分岐する分岐搬送路を更に含み、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記搬送路から前記分岐搬送路に搬送することを特徴とする請求項2に記載のレーザ光照射システム。
【請求項5】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記少なくとも1つの所定位置に向けて搬送することを特徴とする請求項1に記載のレーザ光照射システム。
【請求項6】
前記制御手段は、前記搬送物を前記少なくとも1つの所定位置の前記搬送方向下流側の位置で停止させることを特徴とする請求項5に記載のレーザ光照射システム。
【請求項7】
前記搬送手段は、前記搬送路における前記少なくとも1つの所定位置よりも前記搬送方向下流側の位置で前記搬送路から分岐する分岐搬送路を更に含み、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記搬送路から前記分岐搬送路に搬送することを特徴とする請求項5に記載のレーザ光照射システム。
【請求項8】
前記搬送手段は、前記特定位置に位置する前記搬送物を前記搬送方向に直交する軸線周りに回転させる回転機構を有し、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物が前記特定位置に位置するときに前記搬送物の搬送を停止し、前記回転機構を制御して前記搬送物を回転させ、
前記検出手段は、回転された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出することを特徴とする請求項1〜7のいずれか一項に記載のレーザ光照射システム。
【請求項9】
前記検出手段は、前記一側の面に貼付されている前記熱可逆記録媒体又は前記一側の面における前記熱可逆記録媒体の周囲に表示された識別情報と、該識別情報を検出可能な検出装置とを有し、
前記検出装置の検出結果に基づいて前記一側の面における前記熱可逆記録媒体の有無を検出することを特徴とする請求項1〜8のいずれか一項に記載のレーザ光照射システム。
【請求項10】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出された場合には、前記搬送物を前記少なくとも1つの所定位置に搬送して前記レーザ光射出手段から前記所定パワー以上のレーザ光を射出させて、前記熱可逆記録媒体に記録された画像を消去すること及び前記熱可逆記録媒体に画像を記録することの少なくとも一方を行うことを特徴とする請求項1〜9のいずれか一項に記載のレーザ光照射システム。
【請求項1】
搬送物の一側の面に貼付されている熱可逆記録媒体にレーザ光を照射して画像の消去及び記録の少なくとも一方を行うレーザ光照射システムであって、
前記搬送物を所定の搬送方向に搬送する搬送路を含む搬送手段と、
前記搬送路上における特定位置に搬送された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出する検出手段と、
前記搬送路上における前記特定位置の前記搬送方向下流側の少なくとも1つの所定位置に搬送された前記搬送物の前記一側の面に向けてレーザ光を射出可能なレーザ光射出手段と、
前記搬送手段及び前記レーザ光射出手段を制御する制御手段とを備え、
前記制御手段は、前記搬送物を前記特定位置に搬送し、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記レーザ光射出手段から所定パワー以上のレーザ光を射出させないレーザ光照射システム。
【請求項2】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記少なくとも1つの所定位置に搬送しない請求項1に記載のレーザ光照射システム。
【請求項3】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記特定位置と前記少なくとも1つの所定位置との間で停止させることを特徴とする請求項2に記載のレーザ光照射システム。
【請求項4】
前記搬送手段は、前記搬送路における前記特定位置と前記少なくとも1つの所定位置との間で前記搬送路から分岐する分岐搬送路を更に含み、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記搬送路から前記分岐搬送路に搬送することを特徴とする請求項2に記載のレーザ光照射システム。
【請求項5】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記少なくとも1つの所定位置に向けて搬送することを特徴とする請求項1に記載のレーザ光照射システム。
【請求項6】
前記制御手段は、前記搬送物を前記少なくとも1つの所定位置の前記搬送方向下流側の位置で停止させることを特徴とする請求項5に記載のレーザ光照射システム。
【請求項7】
前記搬送手段は、前記搬送路における前記少なくとも1つの所定位置よりも前記搬送方向下流側の位置で前記搬送路から分岐する分岐搬送路を更に含み、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物を前記搬送路から前記分岐搬送路に搬送することを特徴とする請求項5に記載のレーザ光照射システム。
【請求項8】
前記搬送手段は、前記特定位置に位置する前記搬送物を前記搬送方向に直交する軸線周りに回転させる回転機構を有し、
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出されない場合には、前記搬送物が前記特定位置に位置するときに前記搬送物の搬送を停止し、前記回転機構を制御して前記搬送物を回転させ、
前記検出手段は、回転された前記搬送物の前記一側の面における前記熱可逆記録媒体の有無を検出することを特徴とする請求項1〜7のいずれか一項に記載のレーザ光照射システム。
【請求項9】
前記検出手段は、前記一側の面に貼付されている前記熱可逆記録媒体又は前記一側の面における前記熱可逆記録媒体の周囲に表示された識別情報と、該識別情報を検出可能な検出装置とを有し、
前記検出装置の検出結果に基づいて前記一側の面における前記熱可逆記録媒体の有無を検出することを特徴とする請求項1〜8のいずれか一項に記載のレーザ光照射システム。
【請求項10】
前記制御手段は、前記検出手段により前記熱可逆記録媒体が検出された場合には、前記搬送物を前記少なくとも1つの所定位置に搬送して前記レーザ光射出手段から前記所定パワー以上のレーザ光を射出させて、前記熱可逆記録媒体に記録された画像を消去すること及び前記熱可逆記録媒体に画像を記録することの少なくとも一方を行うことを特徴とする請求項1〜9のいずれか一項に記載のレーザ光照射システム。
【図1】


【図2】
【図4】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図3】
【図5】
【図15】
【図2】
【図4】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図3】
【図5】
【図15】
【公開番号】特開2013−111888(P2013−111888A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261166(P2011−261166)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]