
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーザ測距において生じる測距誤差を補正する技術に関する。
【背景技術】
【0002】
従来のレーザ画像計測装置(例えば、特許文献1)では、装置内部に一定距離の基準点を設け、測距値の校正を行っている。
一定の距離の基準点とは、装置の内部に存在する送信レーザを受信光学系に反射する又は光ファイバを用いて折り返す機構である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−10636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のレーザ画像計測装置において、装置内部に一定距離の基準点を設け、測距値の校正を行う場合は、装置の温度、振動等の環境の変化や基準点からマルチパス等により光学的経路や電気的特性に差が生じ、測距誤差が生じるという課題がある。
例えば、特許文献1のレーザ画像計測装置では、走査された送信光は、校正用光学部、校正用ファイバを通って、送受信光学部に「一定距離の基準点」として、受光する。
変調光が校正用ファイバを通過する際に、熱の影響を受けて校正用ファイバの長さが変化し、このため、変調光の受光時に位相が変化する。
これにより、「一定距離の基準点」に距離誤差が発生する。
【0005】
また、装置を設置する際に、変調器からレーザ走査光学系までの接続配線の距離を変更すると距離誤差を生じ調整が必要になるという課題もあった。
【0006】
また、装置内部に基準点を設ける場合は、受信ビームのダイナミックレンジを考慮し、基準点として特別な反射率の物体を使用する必要があり、コストが高くなるという課題がある。
基準点として配置する「特別な反射率の物体」とは、特許文献1の構成では、校正用光学部と校正用ファイバである。
【0007】
この発明は、上記のような課題を解決することを主な目的の一つとしており、簡易な構成により、測距誤差を補正して正確な距離を導出できる装置を実現することを主な目的とする。
【課題を解決するための手段】
【0008】
本発明に係るレーザ測距装置は、
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部からのレーザ光が照射される位置に配置され、照射されたレーザ光を前記レーザ送受信部に反射する基準反射板と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出するとともに、前記基準反射板でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記基準反射板での位相値と、前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、既知の設置条件に基づく計算により得られた位相値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を導出できる。
【図面の簡単な説明】
【0010】
【図1】実施の形態1に係るレーザ画像計測装置の構成例を示す図。
【図2】実施の形態1及び2に係るレーザ画像計測装置の動作原理を説明する図。
【図3】実施の形態1に係るレーザ送受信部とレーザ光の走査範囲を示す図。
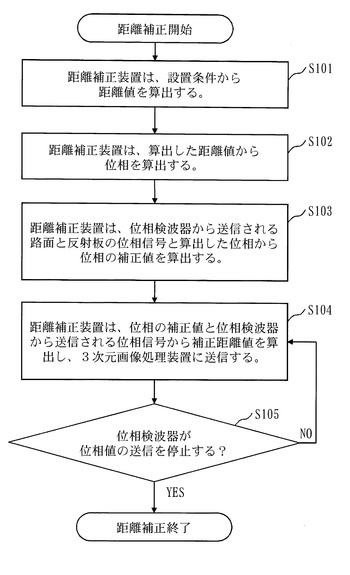
【図4】実施の形態1に係る距離補正手順を示すフローチャート図。
【図5】実施の形態2に係るレーザ画像計測装置の構成例を示す図。
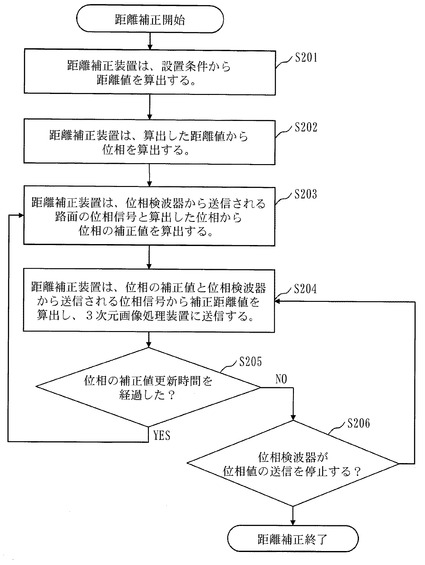
【図6】実施の形態2に係る距離補正手順を示すフローチャート図。
【図7】実施の形態1及び2に係る信号処理部のハードウェア構成例を示す図。
【発明を実施するための形態】
【0011】
実施の形態1.
本実施の形態及び実施の形態2では、レーザ光走査光学系より送信された送信ビームが既知の設置環境から反射した受信ビームの位相値に対して距離補正を行うレーザ画像計測装置を説明する。
【0012】
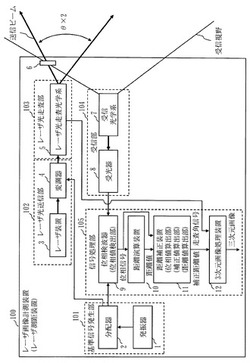
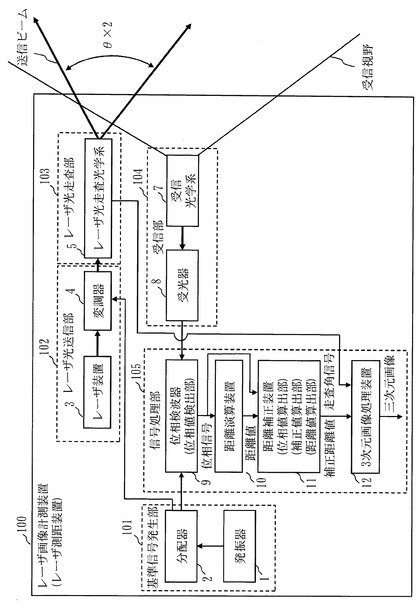
図1は、本実施の形態に係るレーザ画像計測装置100の構成例を示す。
レーザ画像計測装置100は、レーザ測距装置の例である。
【0013】
図1に示すように、レーザ画像計測装置100は、基準信号発生部101、レーザ光送信部102、レーザ光走査部103、受信部104、信号処理部105、及び基準反射板6で構成される。
基準信号発生部101は、発振器1と分配器2で構成される。
レーザ光送信部102は、レーザ装置3と変調器4で構成される。
レーザ光走査部103は、レーザ光走査光学系5で構成される。
受信部104は、受信光学系7と受光器8で構成される。
信号処理部105は、位相検波器9、距離演算装置10、距離補正装置11、3次元画像処理装置12で構成される。
なお、レーザ光走査部103と受信部104とを合わせたものをレーザ送受信部という。
【0014】
発振器1は、基準となる正弦波の変調信号を発生する機能を有しており、分配器は前記変調信号を2つに分岐する機能を有する。
また、レーザ装置3は、レーザ光を発光させる機能をもち、変調器4は前記変調信号に基づき、レーザ光に対して変調をかける機能をもつ。
レーザ光走査光学系5は、ビーム形状を整形し、空間中にレーザ光を照射・走査する機能を有する。
基準反射板6は、レーザ光走査光学系5から固定距離に設置されており、レーザ光を反射する機能を有する。
受信光学系7は、対象物において反射されたレーザ光を受信し、受光器8上に集光する機能を有する。
また、受光器8は、受信光を電気信号に変換する機能を有する。
位相検波器9は、基準信号発生部101から出力する変調信号と受信部104での受信信号を受信して位相検波を行い、位相信号に相当する電気信号を出力する機能を有する。
また、距離演算装置10は、前記位相信号に相当する電気信号に基づき、距離値を算出する機能を有する。
距離補正装置11は、算出した基準反射板6の距離値を基に距離値を補正する機能を有する。
3次元画像処理装置12は、補正距離値と走査角信号を基に、3次元画像を生成する機能を有する。
【0015】
なお、本実施の形態に係る基準反射板6は、以下の条件を満たす必要がある。
(1)レーザ光走査光学系5により走査されたレーザ光を、受信光学系7の受信視野内で反射すること。
(2)受光器8にて受信した光のパワーが適正な範囲(パワーが大きすぎず、小さすぎず)となるように反射できること(パワーが大きすぎると受光器8にて飽和してしまい、小さすぎるとノイズレベルとなり、距離を正確に測定できない)。
【0016】
本実施の形態のレーザ画像計測装置100では、変調信号は正弦波でなく、パルスでもよい。
この場合、送信系から受信系までのパルスの到達時間を計測し距離を導出するため、位相検波器9のかわりに、例えば時間差計測回路を用いることになる。
また、レーザ光送信部102において、変調器4を用いてレーザ光に強度変調をかけるのではなく、変調信号をレーザ装置3に入力し、直接変調光を得る場合もある。
例えば、レーザ装置3にレーザダイオードを用い、変調信号に同期した駆動電流を注入し、直接変調光を得る。
【0017】
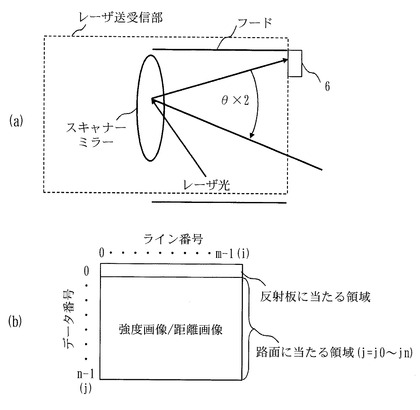
図3は、本実施の形態に係るレーザ送受信部(レーザ光走査部103と受信部104)とレーザ光の走査範囲を示している。
【0018】
図3(a)の角度は、レーザ送受信部のビーム走査半角θの2倍を表している。
レーザ光は、スキャナミラーで反射されて基準反射板6を照射するとともに、レーザ光の角度を変化させることによって、ビーム走査半角θの2倍の範囲内でレーザ光の出射方向が変化する。
後述するように、レーザ送受信部は所定の測距対象面に向けてレーザ光を出射する。
【0019】
レーザ送受信部は、図3(b)に示すように、j方向(データ番号0〜n−1の方向)にレーザ光を上下に走査し、mライン分(ここではi方向に1ラインずつデータを並べる)のレーザ光の送受信を行う。
なお、1ラインの走査には、n回(データ番号0〜n−1)のレーザ光の出射と、n回の反射光の受光が含まれる。
j方向の走査は、レーザ光の出射角度(ビーム走査角αj)を変化させることにより行われる。
図3(b)において、例えば、n=10(データ番号0〜9)であり、中間のデータ番号であるデータ番号4を基準(ビーム走査角α4=0度)とすれば、データ番号0とデータ番号4との間の幅が、データ番号0に対するビーム走査角α0に相当する。
このように、データ番号j=0〜n−1の各々に対して、レーザ光の出射角度(ビーム走査角αj)を変化させて、測距対象面の複数の点にレーザ光を照射する。
なお、ここでn=10としたのは、説明の簡明のためであり、実際の運用では、例えば、図2に示すように512(n=512)程度となる。
【0020】
また、図3(b)のj方向の全幅が、レーザ送受信部のビーム走査半角θの2倍に相当する。
また、基準反射板6には、強度画像/距離画像の上部の領域のレーザ光が照射される。
図3(b)では、データ番号0の領域のレーザ光のみが基準反射板6に照射されるようになっているが、より広範囲のレーザ光が基準反射板6に照射されてもよい。
【0021】
ここで、本実施の形態に係るレーザ画像計測装置100の動作の詳細を説明する前に、信号処理部105における補正値の導出原理を概説する。
【0022】
本実施の形態に係るレーザ送受信部は、レーザ光の出射角度(つまり、ビーム走査角αj)を変化させながら、基準反射板6及び測距対象面(例えば、路面)に対して、順次レーザ光を照射し、基準反射板6及び測距対象面からの反射光を受光する。
なお、レーザ送受信部は、測距対象面に既定の仰角にて対向している。
また、測距対象面における計測目標、つまり、レーザ光を反射する反射点の個数は既定値(=n)である。
ここでは、n個の反射点の各々を反射点j(j=0〜n−1)と表記する。
そして、位相検波器9は、反射点jからの反射光に基づき、反射点jでのレーザ光の位相値(φ’j)を検出する。
更に、位相検波器9は、基準反射板6からの反射光に基づき、基準反射板6でのレーザ光の位相値(φr)を検出する。
また、距離補正装置11が、レーザ送受信部と測距対象面との位置関係、レーザ送受信部の仰角、各々のレーザ光出射時の出射角度(ビーム走査角αj)に基づき、反射点jでのレーザ光の位相値(φj)を算出する。
この位相値(φj)は、レーザ送受信部と測距対象面との位置関係、レーザ送受信部の仰角、ビーム走査角αjとの幾何的関係から導かれる論理値であり、正確な値である。
更に、距離補正装置11は、位相検波器9により検出された反射点jでの位相値(φ’j)と基準反射板6での位相値(φr)と、算出した反射点jでの位相値(φj)とを用いて、基準反射板6における位相値の補正値(φ0)を算出する。
そして、距離補正装置11は、位相検波器9により検出された反射点jでの位相値(φ’j)と基準反射板6での位相値(φr)と、算出した基準反射板6における位相値の補正値(φ0)を用いて、反射点jまでの正確な距離(補正距離値zcj)を求める。
【0023】
なお、位相検波器9は、位相値検出部の例に相当する。
また、距離補正装置11は、位相値算出部と補正値算出部と距離値算出部の例に相当する。
【0024】
次に、図2及び図4を参照して、本実施の形態に係るレーザ画像計測装置100の動作を詳細に説明する。
図2はレーザ画像計測装置100の動作原理を説明する図であり、図4は距離補正手順を示すフローチャート図である。
【0025】
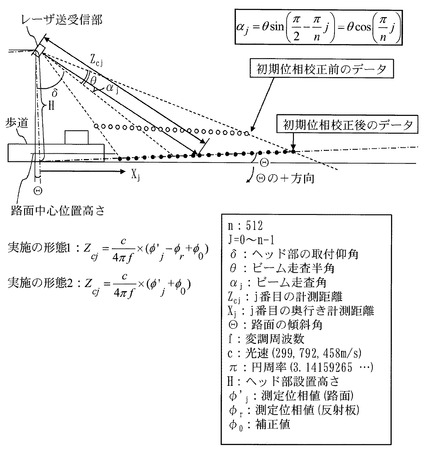
図2では、レーザ画像計測装置100のヘッド部(レーザ送受信部が含まれる)が、歩道上の所定の高さ(ヘッド部設置高さ:H)に設置されており、測距対象面である路面の複数点にレーザ光を照射し、路面上の各点までの距離を求める例を示している。
図2では、図3(b)のj方向にレーザ光が照射されている状態を示している。
図2の黒丸は、初期位相校正後のデータ、すなわち、路面上の反射点の正確な位置(測距誤差が補正された後の位置)を表している。
また、図2の白丸は、初期位相校正前のデータ、すなわち、測距誤差が補正される前の反射点の位置を表している。
なお、図2に示す値のうち、ヘッド部の取付仰角δ、ビーム走査半角θ、路面の傾斜角Θ、変調周波数f、光速c、円周率π、ヘッド部設置高さHは、既知である。
また、反射点jの測定位相値φ’jは、位相検波器9により反射光から検知され、基準反射板6の測定位相値φrは、位相検波器9により反射光から検知される。
ビーム走査角αjは、距離補正装置11によりビーム走査半角θから算出される。
補正値φ0も、距離補正装置11により算出される。
また、反射点jまでの補正距離値zcjも、距離補正装置11により算出される。
【0026】
レーザ画像計測装置100では、発振器1が発生した変調信号に基づいて、レーザ装置3から発生したレーザ光を、変調器4によって強度変調をかけ、レーザ光走査光学系5によってレーザ光を1次元走査する。
対象物(基準反射板6及び図2の路面)からの反射光を、対応する受信視野をもつ受信光学系7で集光した後、受光器8で電気信号に変換する。
その後、位相検波器9で基準となる変調信号と位相検波を行い、反射光の受信強度と、変調信号と受信信号との位相差に相当する電気信号を出力する。
基準反射板6からの反射光から得られた位相値の電気信号が位相値φrに相当し、路面の各点からの反射光から得られた位相値の電気信号が位相値φ’jに相当する。
【0027】
距離演算装置10では、位相信号より反射点jの視線方向の距離zajを算出する。
具体的には、光速をc、位相差をΔφj、変調信号の周波数をfとすると、距離zajは、次式(1)により導出される。
zaj=(c×Δφj)/(4×π×f)・・・(1)
【0028】
距離補正装置11では、正確に距離を求めるために、距離値を補正し、補正距離値zcjを算出する。
具体的には、図4の動作フローに従って、補正距離値zcjを算出する。
【0029】
距離補正装置11は、設置条件(仰角δ、設置高さH、路面傾斜Θ)及びビーム走査半角θ(ビーム走査角αj)を用いて暫定距離値zbjを算出し(S101)、格納する。
なお、暫定距離値zbjの算出は、3次元画像処理装置12で行なってもよい。
この場合は、3次元画像処理装置12も、位相値算出部の例に相当する。
例えば、ビーム走査がサイン波の場合は、以下のような式で算出される。
【0030】
【数1】

【0031】
なお、式(3)により算出する代わりに、ビーム走査角αjの各々の固定値をテーブルとして持っておいてもよい。
【0032】
次に、距離補正装置11は、算出した暫定距離値zbjから、反射点jにおけるレーザ光の位相値φjを以下の式により、算出する(S102)。
【0033】
【数2】
【0034】
また、距離補正装置11は、基準反射板6までの正確な位相値の補正値φ0を以下の式により、求める(S103)。
【0035】
【数3】
【0036】
なお、算出した補正値φ0を、これ以降、固定値として用いる。
【0037】
次に、距離補正装置11は、補正距離値zcjを以下の式により求め、補正距離値zcjを3次元画像処理装置12に送信する(S104)。
【0038】
【数4】
【0039】
この補正距離値zcjが、図2の初期位相構成後のデータ(黒丸)に相当する。
なお、図2の初期位相構成前のデータ(白丸)は、以下の距離値zdjに相当する。
【0040】
【数5】
【0041】
また、距離補正装置11は、位相検波器9が位相値の送信を停止するまで、S104の処理を繰り返す(S105)。
【0042】
図3(b)を例にとると、図4のS101〜S103の処理は、ライン番号0の走査に対して行われる。
図3(b)のライン番号1以降の走査については、ライン番号0の走査に対してS103で算出した補正値φ0(式(5)で算出した補正値)を用いて、S104の手順(つまり、式(6)による計算)にて、補正距離値zcjを算出する。
【0043】
また、以上では、ヘッド部設置高さHが既知の場合に、式(2)により距離zbjを算出する例を説明した。
ヘッド部設置高さHが不明の場合に、Xj=j番目の奥行計測距離が把握できていれば、以下の式で、距離zbjを求めてもよい。
zbj=Xj/sin(αj+δ+Θ)・・・(8)
なお、Xj=j番目の奥行計測距離は、図2に示すように、ヘッド部(レーザ送受信部)から反射点jまでの水平方向での距離である。
【0044】
本実施の形態によれば、既知の設置条件に基づく計算により得られた位相値の論理値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を求めることができる。
【0045】
実施の形態2.
本実施の形態では、実施の形態1で説明した基準反射板6を用いないレーザ画像計測装置100を説明する。
【0046】
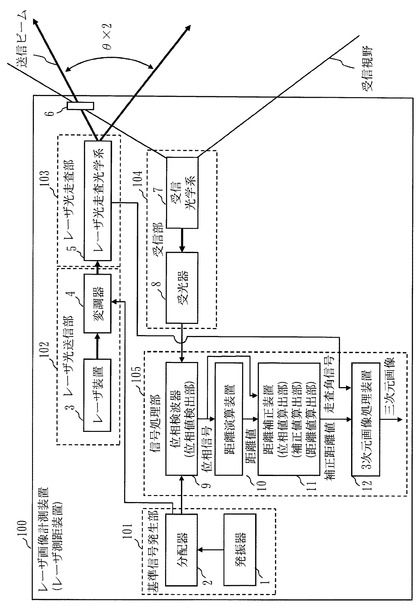
本実施の形態に係るレーザ画像計測装置100の構成は、図5に例示する通りである。
つまり、基準反射板6を用いない点以外は、図1の構成と同じである。
各要素は、図1に示したものと同様なので、説明を省略する。
【0047】
また、本実施の形態に係るレーザ画像計測装置100の動作原理も図2に示した通りである。
このため、図2に示す各要素の説明も省略する。
なお、図2に示すように、本実施の形態では、基準反射板6を用いないので、補正距離値zcjの式が実施の形態1とは異なっている。
【0048】
また、本実施の形態でも、変調信号は正弦波でなく、パルスでもよい。
この場合、送信系から受信系までのパルスの到達時間を計測し距離を導出するため、位相検波器9のかわりに、例えば時間差計測回路を用いることになる。
また、レーザ光送信部102において、変調器4を用いてレーザ光に強度変調をかけるのではなく、変調信号をレーザ装置3に入力し、直接変調光を得る場合もある。
例えば、レーザ装置3にレーザダイオードを用い、変調信号に同期した駆動電流を注入し、直接変調光を得る。
【0049】
次に、実施の形態2に係るレーザ画像計測装置100の動作を説明する。
【0050】
レーザ画像計測装置100では、発振器1が発生した変調信号に基づいて、レーザ装置3から発生したレーザ光を、変調器4によって強度変調をかけ、レーザ光走査光学系5によってレーザ光を1次元走査する。
対象物(図2の路面)からの反射光を、対応する受信視野をもつ受信光学系7で集光した後、受光器8で電気信号に変換する。
その後、位相検波器9で基準となる変調信号と位相検波を行い、反射光の受信強度と、変調信号と受信信号との位相差に相当する電気信号を出力する。
路面の各点からの反射光から得られた位相値の電気信号が位相値φ’jに相当する。
【0051】
距離演算装置10では、位相信号より反射点jの視線方向の距離zajを算出する。
具体的には、光速をc、位相差をΔφj、変調信号の周波数をfとすると、距離zajは、次式(1)により導出される。
zaj=(c×Δφj)/(4×π×f)・・・(1)
【0052】
距離補正装置11では、正確に距離を求めるために、距離値を補正し、補正距離値zcjを算出する。
具体的には、図6の動作フローに従って、補正距離値zcjを算出する。
【0053】
距離補正装置11は、設置条件(仰角δ、設置高さH、路面傾斜Θ)及びビーム走査半角θ(ビーム走査角αj)を用いて暫定距離値zbjを算出し(S201)、格納する。
なお、暫定距離値zbjの算出は、3次元画像処理装置12で行なってもよい。
この場合は、3次元画像処理装置12も、位相値算出部の例に相当する。
例えば、ビーム走査がサイン波の場合は、以下のような式で算出される。
【0054】
【数6】
【0055】
なお、式(3)により算出する代わりに、ビーム走査角αjの各々の固定値をテーブルとして持っておいてもよい。
【0056】
次に、距離補正装置11は、算出した暫定距離値zbjから、反射点jにおけるレーザ光の位相値φjを以下の式により、算出する(S202)。
【0057】
【数7】
【0058】
また、距離補正装置11は、正確な位相値の補正値φ0を以下の式により、求める(S203)。
【0059】
【数8】
【0060】
なお、補正値φ0は、定期的に更新する。
【0061】
次に、距離補正装置11は、補正距離値zcjを以下の式により求め、補正距離値zcjを3次元画像処理装置12に送信する(S204)。
【0062】
【数9】
【0063】
この補正距離値zcjが、図2の初期位相構成後のデータ(黒丸)に相当する。
なお、図2の初期位相構成前のデータ(白丸)は、以下の距離値zdjに相当する。
【0064】
【数10】
【0065】
また、距離補正装置11は、位相の補正値φ0の更新時間が経過したら(S205)、S203の処理により補正値φ0を更新する。
また、位相検波器9が位相値の送信を停止するまで、S204の処理を繰り返す(S206)。
【0066】
図3(b)を例にとると、図6のS201〜S203の処理は、ライン番号0の走査に対して行われる。
図3(b)のライン番号1以降の走査については、補正値φ0の更新時間が経過していなければ、ライン番号0の走査に対してS203で算出した補正値φ0(式(9)で算出した補正値)を用いて、S204の手順(つまり、式(10)による計算)にて、補正距離値zcjを算出する。
【0067】
また、実施の形態1で説明したように、ヘッド部設置高さHが不明の場合に、Xj=j番目の奥行計測距離を用いて、距離zbjを求めてもよい。
【0068】
また、レーザ画像計測装置100が、反射点jに対するレーザ光の出射を複数回にわたって繰り返し行う場合は、式(9)で用いる位相値φ’jを複数回の計測により得られた位相値の移動平均値とすることができる。
つまり、位相検波器9は、複数回の各回において、各反射点jでの位相値を検出し、距離補正装置11は、複数回の計測により得られた位相値の移動平均値を算出し、式(9)の位相値φ’jの代わりに移動平均値を用いて、補正値φ0を算出するようにしてもよい。
また、式(10)においても、位相値φ’jの代わりに移動平均値を用いてもよい。
【0069】
以上、本実施の形態によれば、基準反射板を用いることなく、既知の設置環境に基づく計算により得られた位相値の論理値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を求めることができる。
【0070】
最後に、実施の形態1及び2に示した信号処理部105のハードウェア構成例について説明する。
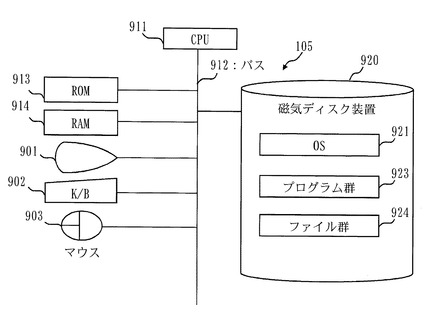
図7は、実施の形態1及び2に示す信号処理部105のハードウェア資源の一例を示す図である。
なお、図7の構成は、あくまでも信号処理部105のハードウェア構成の一例を示すものであり、信号処理部105のハードウェア構成は図7に記載の構成に限らず、他の構成であってもよい。
【0071】
図7において、信号処理部105は、プログラムを実行するCPU911(Central Processing Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。
CPU911は、バス912を介して、例えば、ROM(Read Only Memory)913、RAM(Random Access Memory)914、表示装置901、キーボード902、マウス903、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。
更に、CPU911は、通信ボード、FDD(Flexible Disk Drive)、コンパクトディスク装置(CDD)、プリンタ装置、スキャナ装置等と接続していてもよい。
また、磁気ディスク装置920の代わりに、SSD(Solid State Drive)、光ディスク装置、メモリカード(登録商標)読み書き装置などの記憶装置でもよい。
【0072】
磁気ディスク装置920には、オペレーティングシステム921(OS)、プログラム群923、ファイル群924が記憶されている。
プログラム群923のプログラムは、CPU911がオペレーティングシステム921を利用しながら実行する。
【0073】
また、RAM914には、CPU911に実行させるオペレーティングシステム921のプログラムやアプリケーションプログラムの少なくとも一部が一時的に格納される。
また、RAM914には、CPU911による処理に必要な各種データが格納される。
【0074】
上記プログラム群923には、信号処理部105の各機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
【0075】
ファイル群924には、実施の形態1及び2の説明において、「〜の算出」、「〜の計算」、「〜の検知」、「〜の更新」、「〜の入力」、「〜の出力」等として説明している処理の結果を示す情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。
「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。
【0076】
また、実施の形態1及び2で説明しているフローチャートの矢印の部分は主としてデータや信号の入出力を示す。
データや信号値は、記録媒体に記録される。
また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0077】
また、実施の形態1及び2で説明したフローチャートに示すステップ、手順、処理により、信号処理部105の処理を信号処理方法として捉えることができる。
【符号の説明】
【0078】
1 発振器、2 分配器、3 レーザ装置、4 変調器、5 レーザ光走査光学系、6 基準反射板、7 受信光学系、8 受光器、9 位相検波器、10 距離演算装置、11 距離補正装置、12 3次元画像処理装置、100 レーザ画像計測装置、101 基準信号発生部、102 レーザ光送信部、103 レーザ光走査部、104 受信部、105 信号処理部。
【技術分野】
【0001】
本発明は、レーザ測距において生じる測距誤差を補正する技術に関する。
【背景技術】
【0002】
従来のレーザ画像計測装置(例えば、特許文献1)では、装置内部に一定距離の基準点を設け、測距値の校正を行っている。
一定の距離の基準点とは、装置の内部に存在する送信レーザを受信光学系に反射する又は光ファイバを用いて折り返す機構である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−10636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のレーザ画像計測装置において、装置内部に一定距離の基準点を設け、測距値の校正を行う場合は、装置の温度、振動等の環境の変化や基準点からマルチパス等により光学的経路や電気的特性に差が生じ、測距誤差が生じるという課題がある。
例えば、特許文献1のレーザ画像計測装置では、走査された送信光は、校正用光学部、校正用ファイバを通って、送受信光学部に「一定距離の基準点」として、受光する。
変調光が校正用ファイバを通過する際に、熱の影響を受けて校正用ファイバの長さが変化し、このため、変調光の受光時に位相が変化する。
これにより、「一定距離の基準点」に距離誤差が発生する。
【0005】
また、装置を設置する際に、変調器からレーザ走査光学系までの接続配線の距離を変更すると距離誤差を生じ調整が必要になるという課題もあった。
【0006】
また、装置内部に基準点を設ける場合は、受信ビームのダイナミックレンジを考慮し、基準点として特別な反射率の物体を使用する必要があり、コストが高くなるという課題がある。
基準点として配置する「特別な反射率の物体」とは、特許文献1の構成では、校正用光学部と校正用ファイバである。
【0007】
この発明は、上記のような課題を解決することを主な目的の一つとしており、簡易な構成により、測距誤差を補正して正確な距離を導出できる装置を実現することを主な目的とする。
【課題を解決するための手段】
【0008】
本発明に係るレーザ測距装置は、
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部からのレーザ光が照射される位置に配置され、照射されたレーザ光を前記レーザ送受信部に反射する基準反射板と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出するとともに、前記基準反射板でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記基準反射板での位相値と、前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とする。
【発明の効果】
【0009】
本発明によれば、既知の設置条件に基づく計算により得られた位相値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を導出できる。
【図面の簡単な説明】
【0010】
【図1】実施の形態1に係るレーザ画像計測装置の構成例を示す図。
【図2】実施の形態1及び2に係るレーザ画像計測装置の動作原理を説明する図。
【図3】実施の形態1に係るレーザ送受信部とレーザ光の走査範囲を示す図。
【図4】実施の形態1に係る距離補正手順を示すフローチャート図。
【図5】実施の形態2に係るレーザ画像計測装置の構成例を示す図。
【図6】実施の形態2に係る距離補正手順を示すフローチャート図。
【図7】実施の形態1及び2に係る信号処理部のハードウェア構成例を示す図。
【発明を実施するための形態】
【0011】
実施の形態1.
本実施の形態及び実施の形態2では、レーザ光走査光学系より送信された送信ビームが既知の設置環境から反射した受信ビームの位相値に対して距離補正を行うレーザ画像計測装置を説明する。
【0012】
図1は、本実施の形態に係るレーザ画像計測装置100の構成例を示す。
レーザ画像計測装置100は、レーザ測距装置の例である。
【0013】
図1に示すように、レーザ画像計測装置100は、基準信号発生部101、レーザ光送信部102、レーザ光走査部103、受信部104、信号処理部105、及び基準反射板6で構成される。
基準信号発生部101は、発振器1と分配器2で構成される。
レーザ光送信部102は、レーザ装置3と変調器4で構成される。
レーザ光走査部103は、レーザ光走査光学系5で構成される。
受信部104は、受信光学系7と受光器8で構成される。
信号処理部105は、位相検波器9、距離演算装置10、距離補正装置11、3次元画像処理装置12で構成される。
なお、レーザ光走査部103と受信部104とを合わせたものをレーザ送受信部という。
【0014】
発振器1は、基準となる正弦波の変調信号を発生する機能を有しており、分配器は前記変調信号を2つに分岐する機能を有する。
また、レーザ装置3は、レーザ光を発光させる機能をもち、変調器4は前記変調信号に基づき、レーザ光に対して変調をかける機能をもつ。
レーザ光走査光学系5は、ビーム形状を整形し、空間中にレーザ光を照射・走査する機能を有する。
基準反射板6は、レーザ光走査光学系5から固定距離に設置されており、レーザ光を反射する機能を有する。
受信光学系7は、対象物において反射されたレーザ光を受信し、受光器8上に集光する機能を有する。
また、受光器8は、受信光を電気信号に変換する機能を有する。
位相検波器9は、基準信号発生部101から出力する変調信号と受信部104での受信信号を受信して位相検波を行い、位相信号に相当する電気信号を出力する機能を有する。
また、距離演算装置10は、前記位相信号に相当する電気信号に基づき、距離値を算出する機能を有する。
距離補正装置11は、算出した基準反射板6の距離値を基に距離値を補正する機能を有する。
3次元画像処理装置12は、補正距離値と走査角信号を基に、3次元画像を生成する機能を有する。
【0015】
なお、本実施の形態に係る基準反射板6は、以下の条件を満たす必要がある。
(1)レーザ光走査光学系5により走査されたレーザ光を、受信光学系7の受信視野内で反射すること。
(2)受光器8にて受信した光のパワーが適正な範囲(パワーが大きすぎず、小さすぎず)となるように反射できること(パワーが大きすぎると受光器8にて飽和してしまい、小さすぎるとノイズレベルとなり、距離を正確に測定できない)。
【0016】
本実施の形態のレーザ画像計測装置100では、変調信号は正弦波でなく、パルスでもよい。
この場合、送信系から受信系までのパルスの到達時間を計測し距離を導出するため、位相検波器9のかわりに、例えば時間差計測回路を用いることになる。
また、レーザ光送信部102において、変調器4を用いてレーザ光に強度変調をかけるのではなく、変調信号をレーザ装置3に入力し、直接変調光を得る場合もある。
例えば、レーザ装置3にレーザダイオードを用い、変調信号に同期した駆動電流を注入し、直接変調光を得る。
【0017】
図3は、本実施の形態に係るレーザ送受信部(レーザ光走査部103と受信部104)とレーザ光の走査範囲を示している。
【0018】
図3(a)の角度は、レーザ送受信部のビーム走査半角θの2倍を表している。
レーザ光は、スキャナミラーで反射されて基準反射板6を照射するとともに、レーザ光の角度を変化させることによって、ビーム走査半角θの2倍の範囲内でレーザ光の出射方向が変化する。
後述するように、レーザ送受信部は所定の測距対象面に向けてレーザ光を出射する。
【0019】
レーザ送受信部は、図3(b)に示すように、j方向(データ番号0〜n−1の方向)にレーザ光を上下に走査し、mライン分(ここではi方向に1ラインずつデータを並べる)のレーザ光の送受信を行う。
なお、1ラインの走査には、n回(データ番号0〜n−1)のレーザ光の出射と、n回の反射光の受光が含まれる。
j方向の走査は、レーザ光の出射角度(ビーム走査角αj)を変化させることにより行われる。
図3(b)において、例えば、n=10(データ番号0〜9)であり、中間のデータ番号であるデータ番号4を基準(ビーム走査角α4=0度)とすれば、データ番号0とデータ番号4との間の幅が、データ番号0に対するビーム走査角α0に相当する。
このように、データ番号j=0〜n−1の各々に対して、レーザ光の出射角度(ビーム走査角αj)を変化させて、測距対象面の複数の点にレーザ光を照射する。
なお、ここでn=10としたのは、説明の簡明のためであり、実際の運用では、例えば、図2に示すように512(n=512)程度となる。
【0020】
また、図3(b)のj方向の全幅が、レーザ送受信部のビーム走査半角θの2倍に相当する。
また、基準反射板6には、強度画像/距離画像の上部の領域のレーザ光が照射される。
図3(b)では、データ番号0の領域のレーザ光のみが基準反射板6に照射されるようになっているが、より広範囲のレーザ光が基準反射板6に照射されてもよい。
【0021】
ここで、本実施の形態に係るレーザ画像計測装置100の動作の詳細を説明する前に、信号処理部105における補正値の導出原理を概説する。
【0022】
本実施の形態に係るレーザ送受信部は、レーザ光の出射角度(つまり、ビーム走査角αj)を変化させながら、基準反射板6及び測距対象面(例えば、路面)に対して、順次レーザ光を照射し、基準反射板6及び測距対象面からの反射光を受光する。
なお、レーザ送受信部は、測距対象面に既定の仰角にて対向している。
また、測距対象面における計測目標、つまり、レーザ光を反射する反射点の個数は既定値(=n)である。
ここでは、n個の反射点の各々を反射点j(j=0〜n−1)と表記する。
そして、位相検波器9は、反射点jからの反射光に基づき、反射点jでのレーザ光の位相値(φ’j)を検出する。
更に、位相検波器9は、基準反射板6からの反射光に基づき、基準反射板6でのレーザ光の位相値(φr)を検出する。
また、距離補正装置11が、レーザ送受信部と測距対象面との位置関係、レーザ送受信部の仰角、各々のレーザ光出射時の出射角度(ビーム走査角αj)に基づき、反射点jでのレーザ光の位相値(φj)を算出する。
この位相値(φj)は、レーザ送受信部と測距対象面との位置関係、レーザ送受信部の仰角、ビーム走査角αjとの幾何的関係から導かれる論理値であり、正確な値である。
更に、距離補正装置11は、位相検波器9により検出された反射点jでの位相値(φ’j)と基準反射板6での位相値(φr)と、算出した反射点jでの位相値(φj)とを用いて、基準反射板6における位相値の補正値(φ0)を算出する。
そして、距離補正装置11は、位相検波器9により検出された反射点jでの位相値(φ’j)と基準反射板6での位相値(φr)と、算出した基準反射板6における位相値の補正値(φ0)を用いて、反射点jまでの正確な距離(補正距離値zcj)を求める。
【0023】
なお、位相検波器9は、位相値検出部の例に相当する。
また、距離補正装置11は、位相値算出部と補正値算出部と距離値算出部の例に相当する。
【0024】
次に、図2及び図4を参照して、本実施の形態に係るレーザ画像計測装置100の動作を詳細に説明する。
図2はレーザ画像計測装置100の動作原理を説明する図であり、図4は距離補正手順を示すフローチャート図である。
【0025】
図2では、レーザ画像計測装置100のヘッド部(レーザ送受信部が含まれる)が、歩道上の所定の高さ(ヘッド部設置高さ:H)に設置されており、測距対象面である路面の複数点にレーザ光を照射し、路面上の各点までの距離を求める例を示している。
図2では、図3(b)のj方向にレーザ光が照射されている状態を示している。
図2の黒丸は、初期位相校正後のデータ、すなわち、路面上の反射点の正確な位置(測距誤差が補正された後の位置)を表している。
また、図2の白丸は、初期位相校正前のデータ、すなわち、測距誤差が補正される前の反射点の位置を表している。
なお、図2に示す値のうち、ヘッド部の取付仰角δ、ビーム走査半角θ、路面の傾斜角Θ、変調周波数f、光速c、円周率π、ヘッド部設置高さHは、既知である。
また、反射点jの測定位相値φ’jは、位相検波器9により反射光から検知され、基準反射板6の測定位相値φrは、位相検波器9により反射光から検知される。
ビーム走査角αjは、距離補正装置11によりビーム走査半角θから算出される。
補正値φ0も、距離補正装置11により算出される。
また、反射点jまでの補正距離値zcjも、距離補正装置11により算出される。
【0026】
レーザ画像計測装置100では、発振器1が発生した変調信号に基づいて、レーザ装置3から発生したレーザ光を、変調器4によって強度変調をかけ、レーザ光走査光学系5によってレーザ光を1次元走査する。
対象物(基準反射板6及び図2の路面)からの反射光を、対応する受信視野をもつ受信光学系7で集光した後、受光器8で電気信号に変換する。
その後、位相検波器9で基準となる変調信号と位相検波を行い、反射光の受信強度と、変調信号と受信信号との位相差に相当する電気信号を出力する。
基準反射板6からの反射光から得られた位相値の電気信号が位相値φrに相当し、路面の各点からの反射光から得られた位相値の電気信号が位相値φ’jに相当する。
【0027】
距離演算装置10では、位相信号より反射点jの視線方向の距離zajを算出する。
具体的には、光速をc、位相差をΔφj、変調信号の周波数をfとすると、距離zajは、次式(1)により導出される。
zaj=(c×Δφj)/(4×π×f)・・・(1)
【0028】
距離補正装置11では、正確に距離を求めるために、距離値を補正し、補正距離値zcjを算出する。
具体的には、図4の動作フローに従って、補正距離値zcjを算出する。
【0029】
距離補正装置11は、設置条件(仰角δ、設置高さH、路面傾斜Θ)及びビーム走査半角θ(ビーム走査角αj)を用いて暫定距離値zbjを算出し(S101)、格納する。
なお、暫定距離値zbjの算出は、3次元画像処理装置12で行なってもよい。
この場合は、3次元画像処理装置12も、位相値算出部の例に相当する。
例えば、ビーム走査がサイン波の場合は、以下のような式で算出される。
【0030】
【数1】
【0031】
なお、式(3)により算出する代わりに、ビーム走査角αjの各々の固定値をテーブルとして持っておいてもよい。
【0032】
次に、距離補正装置11は、算出した暫定距離値zbjから、反射点jにおけるレーザ光の位相値φjを以下の式により、算出する(S102)。
【0033】
【数2】
【0034】
また、距離補正装置11は、基準反射板6までの正確な位相値の補正値φ0を以下の式により、求める(S103)。
【0035】
【数3】
【0036】
なお、算出した補正値φ0を、これ以降、固定値として用いる。
【0037】
次に、距離補正装置11は、補正距離値zcjを以下の式により求め、補正距離値zcjを3次元画像処理装置12に送信する(S104)。
【0038】
【数4】
【0039】
この補正距離値zcjが、図2の初期位相構成後のデータ(黒丸)に相当する。
なお、図2の初期位相構成前のデータ(白丸)は、以下の距離値zdjに相当する。
【0040】
【数5】
【0041】
また、距離補正装置11は、位相検波器9が位相値の送信を停止するまで、S104の処理を繰り返す(S105)。
【0042】
図3(b)を例にとると、図4のS101〜S103の処理は、ライン番号0の走査に対して行われる。
図3(b)のライン番号1以降の走査については、ライン番号0の走査に対してS103で算出した補正値φ0(式(5)で算出した補正値)を用いて、S104の手順(つまり、式(6)による計算)にて、補正距離値zcjを算出する。
【0043】
また、以上では、ヘッド部設置高さHが既知の場合に、式(2)により距離zbjを算出する例を説明した。
ヘッド部設置高さHが不明の場合に、Xj=j番目の奥行計測距離が把握できていれば、以下の式で、距離zbjを求めてもよい。
zbj=Xj/sin(αj+δ+Θ)・・・(8)
なお、Xj=j番目の奥行計測距離は、図2に示すように、ヘッド部(レーザ送受信部)から反射点jまでの水平方向での距離である。
【0044】
本実施の形態によれば、既知の設置条件に基づく計算により得られた位相値の論理値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を求めることができる。
【0045】
実施の形態2.
本実施の形態では、実施の形態1で説明した基準反射板6を用いないレーザ画像計測装置100を説明する。
【0046】
本実施の形態に係るレーザ画像計測装置100の構成は、図5に例示する通りである。
つまり、基準反射板6を用いない点以外は、図1の構成と同じである。
各要素は、図1に示したものと同様なので、説明を省略する。
【0047】
また、本実施の形態に係るレーザ画像計測装置100の動作原理も図2に示した通りである。
このため、図2に示す各要素の説明も省略する。
なお、図2に示すように、本実施の形態では、基準反射板6を用いないので、補正距離値zcjの式が実施の形態1とは異なっている。
【0048】
また、本実施の形態でも、変調信号は正弦波でなく、パルスでもよい。
この場合、送信系から受信系までのパルスの到達時間を計測し距離を導出するため、位相検波器9のかわりに、例えば時間差計測回路を用いることになる。
また、レーザ光送信部102において、変調器4を用いてレーザ光に強度変調をかけるのではなく、変調信号をレーザ装置3に入力し、直接変調光を得る場合もある。
例えば、レーザ装置3にレーザダイオードを用い、変調信号に同期した駆動電流を注入し、直接変調光を得る。
【0049】
次に、実施の形態2に係るレーザ画像計測装置100の動作を説明する。
【0050】
レーザ画像計測装置100では、発振器1が発生した変調信号に基づいて、レーザ装置3から発生したレーザ光を、変調器4によって強度変調をかけ、レーザ光走査光学系5によってレーザ光を1次元走査する。
対象物(図2の路面)からの反射光を、対応する受信視野をもつ受信光学系7で集光した後、受光器8で電気信号に変換する。
その後、位相検波器9で基準となる変調信号と位相検波を行い、反射光の受信強度と、変調信号と受信信号との位相差に相当する電気信号を出力する。
路面の各点からの反射光から得られた位相値の電気信号が位相値φ’jに相当する。
【0051】
距離演算装置10では、位相信号より反射点jの視線方向の距離zajを算出する。
具体的には、光速をc、位相差をΔφj、変調信号の周波数をfとすると、距離zajは、次式(1)により導出される。
zaj=(c×Δφj)/(4×π×f)・・・(1)
【0052】
距離補正装置11では、正確に距離を求めるために、距離値を補正し、補正距離値zcjを算出する。
具体的には、図6の動作フローに従って、補正距離値zcjを算出する。
【0053】
距離補正装置11は、設置条件(仰角δ、設置高さH、路面傾斜Θ)及びビーム走査半角θ(ビーム走査角αj)を用いて暫定距離値zbjを算出し(S201)、格納する。
なお、暫定距離値zbjの算出は、3次元画像処理装置12で行なってもよい。
この場合は、3次元画像処理装置12も、位相値算出部の例に相当する。
例えば、ビーム走査がサイン波の場合は、以下のような式で算出される。
【0054】
【数6】
【0055】
なお、式(3)により算出する代わりに、ビーム走査角αjの各々の固定値をテーブルとして持っておいてもよい。
【0056】
次に、距離補正装置11は、算出した暫定距離値zbjから、反射点jにおけるレーザ光の位相値φjを以下の式により、算出する(S202)。
【0057】
【数7】
【0058】
また、距離補正装置11は、正確な位相値の補正値φ0を以下の式により、求める(S203)。
【0059】
【数8】
【0060】
なお、補正値φ0は、定期的に更新する。
【0061】
次に、距離補正装置11は、補正距離値zcjを以下の式により求め、補正距離値zcjを3次元画像処理装置12に送信する(S204)。
【0062】
【数9】
【0063】
この補正距離値zcjが、図2の初期位相構成後のデータ(黒丸)に相当する。
なお、図2の初期位相構成前のデータ(白丸)は、以下の距離値zdjに相当する。
【0064】
【数10】
【0065】
また、距離補正装置11は、位相の補正値φ0の更新時間が経過したら(S205)、S203の処理により補正値φ0を更新する。
また、位相検波器9が位相値の送信を停止するまで、S204の処理を繰り返す(S206)。
【0066】
図3(b)を例にとると、図6のS201〜S203の処理は、ライン番号0の走査に対して行われる。
図3(b)のライン番号1以降の走査については、補正値φ0の更新時間が経過していなければ、ライン番号0の走査に対してS203で算出した補正値φ0(式(9)で算出した補正値)を用いて、S204の手順(つまり、式(10)による計算)にて、補正距離値zcjを算出する。
【0067】
また、実施の形態1で説明したように、ヘッド部設置高さHが不明の場合に、Xj=j番目の奥行計測距離を用いて、距離zbjを求めてもよい。
【0068】
また、レーザ画像計測装置100が、反射点jに対するレーザ光の出射を複数回にわたって繰り返し行う場合は、式(9)で用いる位相値φ’jを複数回の計測により得られた位相値の移動平均値とすることができる。
つまり、位相検波器9は、複数回の各回において、各反射点jでの位相値を検出し、距離補正装置11は、複数回の計測により得られた位相値の移動平均値を算出し、式(9)の位相値φ’jの代わりに移動平均値を用いて、補正値φ0を算出するようにしてもよい。
また、式(10)においても、位相値φ’jの代わりに移動平均値を用いてもよい。
【0069】
以上、本実施の形態によれば、基準反射板を用いることなく、既知の設置環境に基づく計算により得られた位相値の論理値を用いて補正値を算出しており、簡易な構成により、測距誤差を補正して正確な距離を求めることができる。
【0070】
最後に、実施の形態1及び2に示した信号処理部105のハードウェア構成例について説明する。
図7は、実施の形態1及び2に示す信号処理部105のハードウェア資源の一例を示す図である。
なお、図7の構成は、あくまでも信号処理部105のハードウェア構成の一例を示すものであり、信号処理部105のハードウェア構成は図7に記載の構成に限らず、他の構成であってもよい。
【0071】
図7において、信号処理部105は、プログラムを実行するCPU911(Central Processing Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサともいう)を備えている。
CPU911は、バス912を介して、例えば、ROM(Read Only Memory)913、RAM(Random Access Memory)914、表示装置901、キーボード902、マウス903、磁気ディスク装置920と接続され、これらのハードウェアデバイスを制御する。
更に、CPU911は、通信ボード、FDD(Flexible Disk Drive)、コンパクトディスク装置(CDD)、プリンタ装置、スキャナ装置等と接続していてもよい。
また、磁気ディスク装置920の代わりに、SSD(Solid State Drive)、光ディスク装置、メモリカード(登録商標)読み書き装置などの記憶装置でもよい。
【0072】
磁気ディスク装置920には、オペレーティングシステム921(OS)、プログラム群923、ファイル群924が記憶されている。
プログラム群923のプログラムは、CPU911がオペレーティングシステム921を利用しながら実行する。
【0073】
また、RAM914には、CPU911に実行させるオペレーティングシステム921のプログラムやアプリケーションプログラムの少なくとも一部が一時的に格納される。
また、RAM914には、CPU911による処理に必要な各種データが格納される。
【0074】
上記プログラム群923には、信号処理部105の各機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
【0075】
ファイル群924には、実施の形態1及び2の説明において、「〜の算出」、「〜の計算」、「〜の検知」、「〜の更新」、「〜の入力」、「〜の出力」等として説明している処理の結果を示す情報やデータや信号値や変数値やパラメータが、「〜ファイル」や「〜データベース」の各項目として記憶されている。
「〜ファイル」や「〜データベース」は、ディスクやメモリなどの記録媒体に記憶される。
【0076】
また、実施の形態1及び2で説明しているフローチャートの矢印の部分は主としてデータや信号の入出力を示す。
データや信号値は、記録媒体に記録される。
また、データや信号は、バス912や信号線やケーブルその他の伝送媒体によりオンライン伝送される。
【0077】
また、実施の形態1及び2で説明したフローチャートに示すステップ、手順、処理により、信号処理部105の処理を信号処理方法として捉えることができる。
【符号の説明】
【0078】
1 発振器、2 分配器、3 レーザ装置、4 変調器、5 レーザ光走査光学系、6 基準反射板、7 受信光学系、8 受光器、9 位相検波器、10 距離演算装置、11 距離補正装置、12 3次元画像処理装置、100 レーザ画像計測装置、101 基準信号発生部、102 レーザ光送信部、103 レーザ光走査部、104 受信部、105 信号処理部。
【特許請求の範囲】
【請求項1】
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部からのレーザ光が照射される位置に配置され、照射されたレーザ光を前記レーザ送受信部に反射する基準反射板と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出するとともに、前記基準反射板でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記基準反射板での位相値と、前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とするレーザ測距装置。
【請求項2】
前記補正値算出部は、
反射点ごとに、前記位相値検出部により検出された反射点での位相値から前記基準反射板での位相値を差し引いた差分値を、前記位相値算出部により算出された反射点での位相値から差し引く計算を行い、
得られた反射点ごとの計算値の平均をとって前記補正値を算出することを特徴とする請求項1に記載のレーザ測距装置。
【請求項3】
前記レーザ測距装置は、更に、
前記位相値検出部により検出された反射点での位相値と前記基準反射板での位相値と、前記補正値算出部により算出された補正値とを用いて、反射点ごとに、反射点との距離値を算出する距離値算出部を有することを特徴とする請求項1又は2に記載のレーザ測距装置。
【請求項4】
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とするレーザ測距装置。
【請求項5】
前記補正値算出部は、
反射点ごとに、前記位相値算出部により算出された位相値から前記位相値検出部により検出された位相値を差し引く計算を行い、
得られた反射点ごとの計算値の平均をとって前記補正値を算出することを特徴とする請求項4に記載のレーザ測距装置。
【請求項6】
前記レーザ測距装置は、
各反射点に対するレーザ光の出射を複数回にわたって繰り返し行い、
前記位相値検出部は、
前記複数回の各回において、各反射点でのレーザ光の位相値を検出し、
前記補正値算出部は、
反射点ごとに、前記位相値検出部により検出された位相値の前記複数回における平均値を算出し、
算出した各反射点の位相値の平均値と前記位相値算出部により算出された各反射点での位相値とを用いて、前記補正値を算出することを特徴とする請求項4又は5に記載のレーザ測距装置。
【請求項7】
前記レーザ測距装置は、更に、
前記位相値検出部により検出された位相値と、前記補正値算出部により算出された補正値とを用いて、反射点ごとに、反射点との距離値を算出する距離値算出部を有することを特徴とする請求項4〜6のいずれかに記載のレーザ測距装置。
【請求項1】
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部からのレーザ光が照射される位置に配置され、照射されたレーザ光を前記レーザ送受信部に反射する基準反射板と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出するとともに、前記基準反射板でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記基準反射板での位相値と、前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とするレーザ測距装置。
【請求項2】
前記補正値算出部は、
反射点ごとに、前記位相値検出部により検出された反射点での位相値から前記基準反射板での位相値を差し引いた差分値を、前記位相値算出部により算出された反射点での位相値から差し引く計算を行い、
得られた反射点ごとの計算値の平均をとって前記補正値を算出することを特徴とする請求項1に記載のレーザ測距装置。
【請求項3】
前記レーザ測距装置は、更に、
前記位相値検出部により検出された反射点での位相値と前記基準反射板での位相値と、前記補正値算出部により算出された補正値とを用いて、反射点ごとに、反射点との距離値を算出する距離値算出部を有することを特徴とする請求項1又は2に記載のレーザ測距装置。
【請求項4】
既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、レーザ光の出射角度を変化させながら前記測距対象面にレーザ光を出射し、出射したレーザ光の前記測距対象面からの反射光を受光するレーザ送受信部と、
前記レーザ送受信部が受光した反射光に基づき、前記測距対象面においてレーザ光を反射した各反射点でのレーザ光の位相値を検出する位相値検出部と、
前記レーザ送受信部と前記測距対象面との位置関係と、前記レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点でのレーザ光の位相値を算出する位相値算出部と、
前記位相値検出部により検出された各反射点での位相値と前記位相値算出部により算出された各反射点での位相値とを用いて、反射点との距離値の算出に用いる補正値を算出する補正値算出部とを有することを特徴とするレーザ測距装置。
【請求項5】
前記補正値算出部は、
反射点ごとに、前記位相値算出部により算出された位相値から前記位相値検出部により検出された位相値を差し引く計算を行い、
得られた反射点ごとの計算値の平均をとって前記補正値を算出することを特徴とする請求項4に記載のレーザ測距装置。
【請求項6】
前記レーザ測距装置は、
各反射点に対するレーザ光の出射を複数回にわたって繰り返し行い、
前記位相値検出部は、
前記複数回の各回において、各反射点でのレーザ光の位相値を検出し、
前記補正値算出部は、
反射点ごとに、前記位相値検出部により検出された位相値の前記複数回における平均値を算出し、
算出した各反射点の位相値の平均値と前記位相値算出部により算出された各反射点での位相値とを用いて、前記補正値を算出することを特徴とする請求項4又は5に記載のレーザ測距装置。
【請求項7】
前記レーザ測距装置は、更に、
前記位相値検出部により検出された位相値と、前記補正値算出部により算出された補正値とを用いて、反射点ごとに、反射点との距離値を算出する距離値算出部を有することを特徴とする請求項4〜6のいずれかに記載のレーザ測距装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−3025(P2013−3025A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−135847(P2011−135847)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]