
レーザ計測方法及びレーザ計測システム
【課題】 飛行体と地上との間で行うレーザ計測において、即応性を高めるために、伝送データの圧縮率を高める。
【解決手段】 レーザの発射時刻データTnの圧縮効率を高める。Tnの二次差分値Δ2,nはほとんどが−1,0,1のいずれかであり、連続する2つのΔ2,nの順列パターンを4ビットの保存データ要素で表す。さらに2つの保存データ要素を組み合わせて1バイトの保存データを生成することにより、4つのΔ2,nを1バイトのデータに圧縮することができる。
【解決手段】 レーザの発射時刻データTnの圧縮効率を高める。Tnの二次差分値Δ2,nはほとんどが−1,0,1のいずれかであり、連続する2つのΔ2,nの順列パターンを4ビットの保存データ要素で表す。さらに2つの保存データ要素を組み合わせて1バイトの保存データを生成することにより、4つのΔ2,nを1バイトのデータに圧縮することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛行体と地上との間で行うレーザ計測方法及びそれを用いたレーザ計測システムに関し、特にレーザパルスの発射時刻データの圧縮伝送に関する。
【背景技術】
【0002】
航空機等の飛行体からレーザビームを照射して地上の凹凸情報を取得するレーザ計測方法として、下記特許文献1に記載されるものが知られている。一般に、航空機上で取得される観測データは、発射するレーザパルス単位に発射時刻、発射位置、発射方向、複数のリターンパルスに関する情報を含み、データサイズが膨大なものとなる。そのため、従来技術においては、航空機上で取得されたデータは、航空機に搭載したデータ記録部に格納され、計測終了後に地上のデータ処理装置に移され処理、解析される。
【0003】
しかし、例えば、災害時における地上の状況把握等のような利用目的では、即応性が要求される。そこで、航空機の着陸を待たずにデータ解析を行うことを可能とするレーザ計測システムの開発が進められている。
【特許文献1】特開2003−156330号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
即応性を高めるには、航空機上で取得される膨大な観測データを無線伝送で地上に送ることが要求されるが、当該データを限られた伝送容量で短時間に地上に送ることが難しいという問題があった。この問題に対しては、当該データを圧縮して伝送し、地上にて伸張するという方法を採りうる。圧縮効率は各種データの性質にも依存し、それを如何に高めるかはデータ種類毎に個別に検討すべき課題となる。
【0005】
本発明は、特に、レーザパルスの発射時刻データに関して圧縮効率を高め、地上への迅速なデータ伝送を実現し、即応性の高いレーザ計測方法及びレーザ計測システムの提供を目的とする。
【課題を解決するための手段】
【0006】
本発明に係るレーザ計測方法は、飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得する観測ステップと、前記観測データを地上基地局に伝送する伝送ステップと、前記飛行体の飛行中に前記地上基地局において前記観測データを解析して地表形状を演算する演算ステップとを含むレーザ計測方法であって、前記伝送ステップが、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮ステップを有し、前記圧縮ステップが、前記発射時刻データのデータ列から二次差分値列を生成する差分ステップと、前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付けステップと、前記対応付けステップにて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成ステップと、を有し、前記数値列パターンの集合が、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含む。
【0007】
本発明の好適な態様は、前記代表差分値が、−1、0、及び+1であるレーザ計測方法である。
【0008】
他の本発明に係るレーザ計測方法においては、前記mが3であり、前記kが2であり、前記数値列パターンの集合が、前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である3通りの特例パターンを含む。
【0009】
また他の本発明に係るレーザ計測方法においては、前記指標データが、4ビットのバイナリデータで表され、前記形成ステップが、前記対応付けステップにて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合ステップを有する。
【0010】
別の本発明に係るレーザ計測方法においては、前記kが2であり、前記結合ステップが、前記第1指標データが対応付けられた前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である場合又は前記第2指標データが存在しない場合に、当該第1指標データに、いずれの前記指標データとも識別可能な4ビットの例外識別データを結合して1バイトの前記圧縮データを生成する。
【0011】
また別の本発明に係るレーザ計測方法においては、前記形成ステップが、前記圧縮データに格納された前記二次差分値のうち前記代表差分値以外の特例差分値を、当該圧縮データと後続の前記圧縮データとの間に所定のフォーマットで挿入する挿入ステップを有する。
【0012】
本発明に係るレーザ計測システムは、飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得し、前記観測データを送信する機上装置と、地上に設置され、前記観測データを前記飛行体の飛行中に前記機上装置から受信し解析して地表形状を演算する地上装置と、を有し、前記機上装置が、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮手段を有し、前記圧縮手段が、前記発射時刻データのデータ列から二次差分値列を生成する差分手段と、前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付け手段と、前記対応付け手段にて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成手段と、を有し、前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むものである。
【0013】
他の本発明に係るレーザ計測システムにおいては、前記指標データが、4ビットのバイナリデータで表され、前記形成手段が、前記対応付け手段にて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合手段を有する。
【発明の効果】
【0014】
本発明によれば、発射時刻データの複数の二次差分値を1つの指標データで表すことにより、発射時刻データの圧縮効率が一層向上し、即応性が向上したレーザ計測方法及びレーザ計測システムが実現される。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。
【0016】
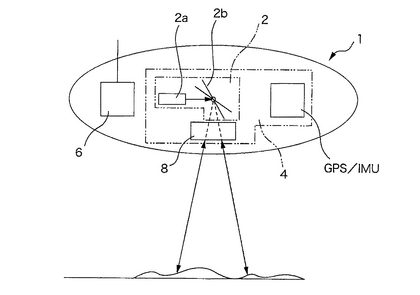
図1は、航空機、ヘリコプター等の飛行体を使用したレーザ計測の概要を示す説明図である。飛行体1は、レーザ計測部4及び送信部6を搭載し、レーザ計測部4はレーザスキャナ2、反射波受信センサ8、及びGPS/IMU(Global Positioning System/Inertial Measurement Unit)を含んで構成される。
【0017】
レーザスキャナ2は、制御部(図示せず)により、所定時間間隔でレーザパルスを発射するレーザ発射部2aと、レーザパルスを所定角度範囲内で振って地上のスキャンを可能とする回転ミラー2bとを備える。レーザの発射パルスに対する地表からの反射パルス(リターンパルス)は反射波受信センサ8により検出される。
【0018】
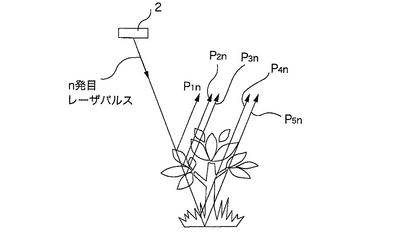
図2は、リターンパルスを示す説明図である。発射された1発のレーザパルスに対して、地上物による複数回(通常1ないし5回程度)の反射が生じ、それに応じてリターンパルスも複数回検出され得る。反射波受信センサ8は、n発目の発射パルスに対するk番目のリターンパルスの捕捉時刻情報をリターンパルスデータPknとして出力する。また、GPS/IMUは、レーザスキャナ2のレーザパルス発射タイミングに同期して、レーザパルス発射時の飛行体1のGPS位置、傾き情報等を出力する。
【0019】
なお、レーザデータ及びGPS位置、傾き情報はレーザ計測部4の構造により適宜無次元化された数値として出力されるものであってもよく、またレーザパルス発射時刻、或いはリターンパルスデータ等の時刻情報、例えば、計測開始からの経過時間であってもよい。
【0020】
これらリターンパルスデータPkn、GPS/IMU情報に加えて、レーザパルスの発射時刻データTn、そのときの回転ミラー2bの回転角データθnが観測データとして取得され、観測データは送信部6から地上基地局へ無線伝送される。後述するように、地上基地局では、GPS/IMU情報を評定要素として、リターンパルスデータPknを中心とする観測データにより飛行体1と地表面との距離を演算し、地表の位置、高さを演算する。
【0021】
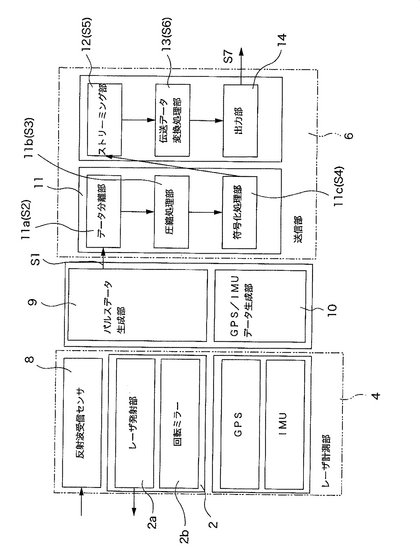
図3はレーザ計測部4及び送信部6の構成を示すブロック図である。上述したようにレーザ計測部4は、レーザスキャナ2、反射波受信センサ8、及びGPS/IMUを備え、レーザスキャナ2及び反射波受信センサ8における観測データはパルスデータ生成部9に出力され、またGPS/IMUにおける観測データはGPS/IMUデータ生成部10へ出力される。
【0022】
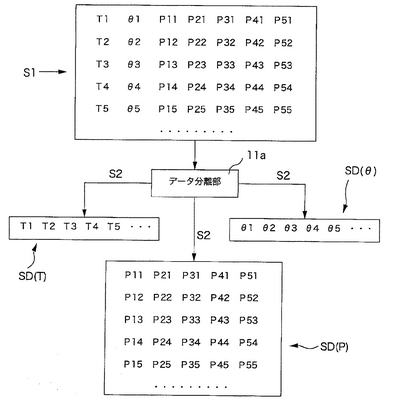
図4は、パルスデータ生成部9からのデータの出力フォーマットを示す模式図である。また図5は、GPS/IMUデータ生成部10からのデータの出力フォーマットを示す模式図である。パルスデータ生成部9は、上述したように、発射パルス(レーザパルス)を単位として、当該発射パルスに対応する各出力値を所定の順序で配列したデータ列を出力する。図4に示す例は、各発射パルスに対して最大5次までのリターンパルスデータPknが取得され得ることを想定した場合のデータフォーマットを示すものであり、先頭からレーザパルスの発射時刻データTn、ミラー回転角データθn、及びリターンパルスデータPknの順に格納される。ちなみに、上述したように、リターンパルスデータPknは必ずしも5次まで取得されるとは限らないため、取得されなかった次数の格納位置には、例えば“0”を格納する(図14参照)。
【0023】
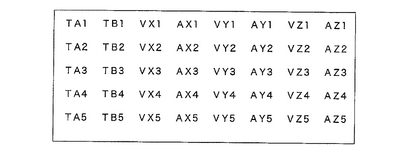
一方、GPS/IMUデータ生成部10からは、図5に示すように、GPS時間TAn、IMU時間TBn、x方向加速度VXn、x方向角度AXn、y方向加速度VYn、y方向角度AYn、z方向加速度VZn、z方向角度AZnが出力される。これらGPS/IMUデータ生成部10からの出力値は、パルス番号を表す添え字“n”を介して、パルスデータ生成部9の出力値と対応付けられる。
【0024】
飛行体1におけるレーザ計測が開始されると、レーザ計測部4にて取得される観測データは、パルスデータ生成部9或いはGPS/IMUデータ生成部10へ出力される。パルスデータ生成部9及びGPS/IMUデータ生成部10は、入力された観測データから所定のデータ列を生成し送信部6の圧縮部11へ出力する(ステップS1)。
【0025】
圧縮部11は、データ分離部11a、圧縮処理部11b及び符号化処理部11cを含んで構成され、入力されたデータを圧縮する。この圧縮処理は、即時性の向上を図るために、データ全体の容量に対し、例えば、4Mバイト程度の比較的小さな単位で行われる。
【0026】
データ分離部11aは、図4に示すように、パルスデータ生成部9から出力されたパルスデータを、レーザパルス発射時刻データTn、ミラー回転角データθn及びリターンパルスデータPknの3種類のデータ列SD(T)、SD(θ)及びSD(P)に分割し(ステップS2)、これら各分離データSDを圧縮処理部11bへ出力する。図4に示すように、分離データ列SD(T)及びSD(θ)それぞれにおけるレーザパルス発射時刻データTn、ミラー回転角データθnは、パルス発射順に並ぶ。また、分離データ列SD(P)におけるリターンパルスデータPknは、パルス発射順が同じ5個のデータからなるデータ群がパルス発射順に並び、各データ群の中では、5個のデータが反射次数順に並んだフォーマットを有する。この分離データSD(P)には、必要に応じて、データ群の境界にデータ終端マークが挿入される。
【0027】
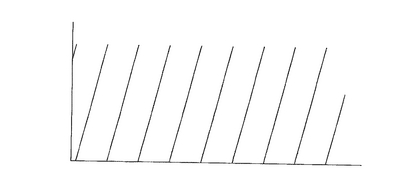
圧縮処理部11bは、各分離データ列SDの特徴を利用して、それぞれ異なったアルゴリズムでデータ圧縮を行う(ステップS3)。図6は、レーザ発射時刻データの変化を示すグラフであり、横軸がレーザパルス発射順序、縦軸が発射時刻である。この図に示されるように、レーザパルス発射順序に対して発射時刻は、周期的に繰り返す右上がりの直線上に分布する傾向がある。この性質から、隣接する発射時刻データTnの二次差分値は0近傍に分布する小さな値となることが期待され、この二次差分値を用いることにより発射時間データの圧縮を図ることができる。
【0028】
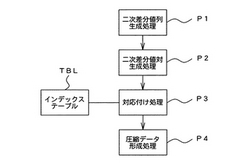
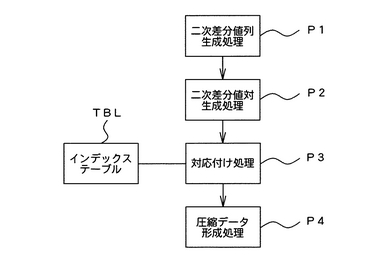
図7は、圧縮処理部11bにおける発射時刻データの圧縮処理の概要を示すブロック図である。圧縮処理部11bは、まず、二次差分値列を順次、生成し(処理P1)、生成される二次差分値を順番に2つずつ組み合わせた二次差分値対を生成する(処理P2)。圧縮処理部11bは、二次差分値対に現れる数値列パターンと指標データとの関連付けを定義するインデックステーブルTBLを予め設定し、処理P2で生成された二次差分値対とテーブルTBLに登録された指標データとの対応付け処理を行う(処理P3)。この処理では、二次差分値対と一致する数値列パターンがテーブルTBLに存在する場合に、その二次差分値対に、当該数値列パターンに対応する指標データが対応付けられる。圧縮処理部11bは、この指標データを用いて圧縮データを形成する(処理P4)
【0029】
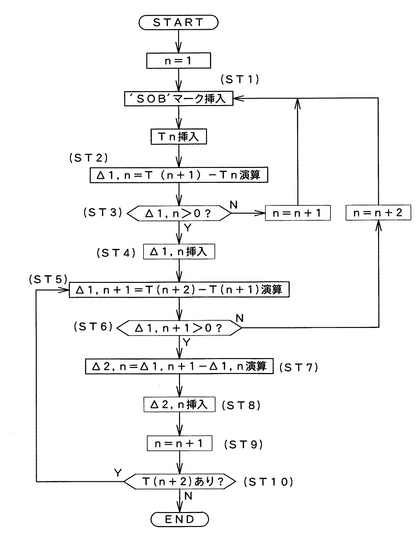
図8は、レーザパルス発射時刻データTnの圧縮処理における二次差分値生成処理P1を示す概略のフロー図である。なお、以下の説明において、記号“Tn”はn発目のレーザパルスの発射時刻、記号“Δ1,n”は発射時刻Tnの一次差分値(Tn+1)−(Tn)、記号“Δ2,n”は発射時刻Tnの二次差分値(Δ1,n+1)−(Δ1,n)を表す。
【0030】
二次差分値列S(Δ2,n)の生成に際し、まず、二次差分値列生成用のバッファエリアBUFをメモリ上に設定し、先頭にSOB(Start of Block)マークを挿入する(ステップST1)。SOBは予め定められた所定のビット長を有しており、以下の処理で出現することのないコードに設定される。この後、SOBマークの後にレーザパルスの発射時刻Tnを挿入する。このTnは、二次差分値列から元の発射時刻の分離データ列SD(T)を復元する際に用いられる。
【0031】
次に、一次差分値Δ1,nを算出し(ステップST2)、その正負を判定する(ステップST3)。上述したように、発射時刻データTnは周期的に繰り返す右上がりの直線上に分布する傾向があるため、一次差分値の符号が正の場合には、その一次差分値の関係するTn+1とTnとは同じ直線に沿って位置し、一方、一次差分値の符号が負の場合には、Tn+1とTnとの間で直線の乗り換えが生じ、Tn+1は次の直線に沿って位置していると考えられる。
【0032】
符号が負の場合には、パルス番号nを1だけ増加させ、ステップST1から処理を繰り返す。すなわち、改めてSOBマークをバッファリングされているデータの後尾の挿入し、続けてTnを挿入する。例えば、直前のステップST1からの処理がn=kに対するものでありTkを挿入した後、(Tk+1)−(Tk)<0であった場合には、次のステップST1からの処理においては、SOBマークの次にTk+1が挿入される。
【0033】
ちなみに、一次差分値の符号が負の場合には上述のようにSOBマークが挿入され、このSOBマークは評価対象のT値が直前のT値が帰属する直線からはずれて新たな回帰直線に移動したことを示すこととなる。すなわち、SOBマークは、それぞれ1つの直線に対応するデータブロックのデリミタとしての意味を有する。
【0034】
一方、符号が正の場合には、求めた一次差分値Δ1,nを直前に挿入されたTnの後に挿入する(ステップST4)。このΔ1,nは、直前に挿入されているTnと共に、二次差分値列から元の発射時刻の分離データ列SD(T)を復元する際に用いられる。
【0035】
符号が正の場合、さらに一次差分値Δ1,n+1を求める(ステップST5)。この一次差分値Δ1,n+1についてもステップST3と同様の理由から符号の判定が行われ(ステップST6)、符号が負の場合には、パルス番号nを2だけ増加させステップST1から処理を繰り返し、新たなデータブロックの生成が開始される。
【0036】
Δ1,n+1の符号が正の場合には、二次差分値Δ2,nを求め(ステップST7)、ステップST4で挿入したΔ1,nの後に当該Δ2,nを挿入する(ステップST8)。二次差分値の生成は、nを1ずつ増加させながら(ステップST9)、繰り返され、上述のようにT値が次の直線に帰属することになるか(ステップST6)、T値の終わりに達するまで(ステップST10)、順次、二次差分値がバッファされる。
【0037】
なお、発射時刻データTnの観測精度によっては図6の直線が多少変動する場合がある。この場合、一次差分値が負でかつその絶対値が所定値より大きい場合には、Tn+1とTnとの間で直線の乗り換えが生じているものと判断する。一方、一次差分値が正、または一次差分値が負でかつその絶対値が所定値以下の場合には、Tn+1とTnが同じ直線に沿って位置しているものと判断する。
【0038】
元の時刻データTnは大きな値を取り得るが、二次差分値Δ2,nは、上述のように0近傍の小さな値であり、元の時刻データTnに比べて短いデータ長で表すことができる。例えば、元のデータTnが4バイトを要するとしても、基本的に二次差分値Δ2,nは1バイトで表現することが可能である。すなわち、二次差分値は既に圧縮されていると言える。しかし、圧縮処理部11bは、バッファに次々と挿入される二次差分値を、これから述べる処理P2〜P4によりさらに圧縮し、保存データを生成する。以下、この二次差分値列の圧縮処理について説明する。
【0039】
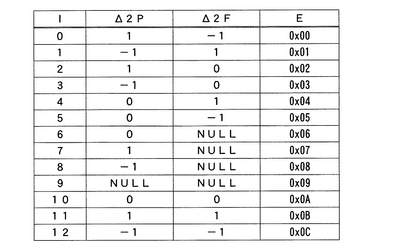
図9は処理P3で用いるインデックステーブルTBLの構造を示す模式図である。図には、左欄に示すインデックスIに対応する二次差分値対の1つ目の値(先行二次差分値Δ2P)、2つ目の値(後続二次差分値Δ2F)、及び保存データ要素Eが横方向に配列されている。ここで、二次差分値は既に述べたように、0近傍にほとんどが分布する。経験的に、二次差分値列において−1,0,+1が高い出現確率で現れる。そこで、本実施形態では、二次差分値列における出現確率が所定値以上である代表差分値として、−1,0,+1を設定し、これに対応して、インデックステーブルが定義されている。EはIをバイナリ表示したデータである。後述するようにインデックスIは13種類であるので、Eは実質的に4ビットで表現可能である。
【0040】
インデックスI=0〜5及び10〜12は、Δ2P、Δ2Fからなる数値パターンが、3種類の代表差分値(−1,0,+1)を2個並べる9通りの順列パターンに対応する。
【0041】
インデックスI=6〜8は、Δ2Pが3種類の代表差分値(−1,0,+1)のいずれかであり、Δ2Fが代表差分値以外の値(Δ2Fが存在しない場合を含む)である3つの特例パターンである。図9において、代表差分値以外であることは記号“NULL”で表されている。
【0042】
インデックスI=9は、例外的な場合に用いられる例外識別データを定義するものである。ここで例外的な場合の1つは、Δ2Pとして取り出した二次差分値が代表差分値以外である場合(特例差分値)である。この場合には、後続する二次差分値をΔ2Fとして組み合わせることなく、Δ2Pとして取り出した二次差分値だけを以て、インデックスIとして9を割り当てる。例外的な場合のもう1つは、Δ2P、Δ2Fのいずれも存在しないことを表す場合である。
【0043】
圧縮処理部11bは、圧縮処理P1〜P4の開始に際して、圧縮データ格納用のデータエリアSTRをメモリ上に設定する。圧縮処理部11bは、二次差分値列生成処理P1において、上述のバッファBUFへのデータ格納を行う一方、処理P2〜P4において、当該バッファBUFから順次、データを取り出し処理を行う。
【0044】
圧縮処理部11bは、処理P2において、バッファBUFから取り出したデータがSOBマーク、Tn、Δ1,nである場合は、それらデータをそのままデータエリアSTRに転写する。
【0045】
一方、バッファBUFから取り出したデータが二次差分値Δ2,nである場合には、圧縮処理部11bはさらにそれに続く二次差分値Δ2,n+1も取り出し、二次差分値対を生成し(処理P2)、テーブルTBLのΔ2P、Δ2Fからなるパターンとのマッチングを行って当該二次差分値対に対応する保存データ要素E1を決定する(処理P3)。
【0046】
二次差分値対が代表差分値の組み合わせであるI=0〜5、10〜12であった場合、圧縮処理部11bは、原則として、さらに後続する二次差分値Δ2,n+2、Δ2,n+3からなる二次差分値対について同様に保存データ要素E2を決定する。そして、E1を上位4ビット、E2を下位4ビットとして両者を結合して1バイトの保存データESを生成し、これを圧縮データ格納用データエリアSTRに追加格納する(処理P4)。
【0047】
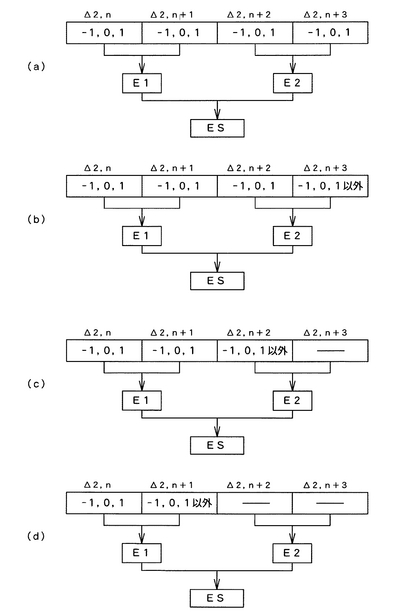
図10は、圧縮データ形成処理P4を説明する模式図である。図10(a)〜(c)が、上述した先行する二次差分値対のインデックスIが0〜5,10〜12である場合を表している。図10(a)(b)は4つの二次差分値に基づいて保存データESが生成される原則的な場合に対応し、図10(a)は、後続の二次差分値対のインデックスIも0〜5,10〜12である場合であり、図10(b)は、後続の二次差分値対のインデックスIが6〜8である場合である。
【0048】
一方、図10(c)(d)は、3つ、又は2つの二次差分値に基づいて保存データESが生成される例外的な場合であり、保存データ要素E2として、インデックスI=9に対応するデータが割り当てられる。そして、図10(a)(b)の場合と同様、E1を上位4ビット、E2を下位4ビットとして両者を結合して1バイトの保存データESが生成され、これが圧縮データ格納用データエリアSTRに追加格納される(処理P4)。
【0049】
ここで、図10(c)は、Δ2,n+2として取り出した二次差分値が代表差分値以外であった場合である。後述するように、代表差分値以外の二次差分値(特例差分値)が現れた場合、処理P4の一部として、当該特例差分値をデータエリアSTRに格納する処理が行われ、後続の二次差分値についての処理はその特例差分値を格納する処理後に継続される。そのため、当該Δ2,n+2として取り出した二次差分値の後続の二次差分値はΔ2,n+3としては取り出さず、保存データ要素E2としてインデックスI=9に対応するデータを割り当てる。
【0050】
また、図10(d)は、Δ2,n+1が特例差分値である場合である。この場合も、特例差分値を格納する処理に移行する都合上、後続の二次差分値はΔ2,n+2、Δ2,n+3として取り出さず、保存データ要素E2としてインデックスI=9に対応するデータを割り当てる。
【0051】
ちなみに、図10(b)に示す場合は、Δ2,n+3が特例差分値であり、この保存データESをデータエリアSTRに格納した後、特例差分値の格納処理が行われる。また、Δ2,nが特例差分値であった場合が図10には示されていないが、この場合は、保存データ要素の組み合わせからなる保存データESは生成せずに、直接、先行する保存データESに続けて、当該特例差分値が追加格納される。
【0052】
特例差分値の格納処理は、先行する保存データES及び後続する保存データESとの間に挿入されたことが識別可能な所定のフォーマットのデータ(特例保存データEE)をデータエリアSTRに追加する処理である。例えば、特例保存データEEの第1バイトはいずれの保存データESとも区別可能なデータヘッダとする。例えば、データヘッダは“0xFF”とすることができる。データヘッダに続けて、1〜4バイトの可変長データを追加する。可変長データのデータ長は例えば、第2バイトのいくつかの所定ビットを用いて表すように定義される。地上基地局側で圧縮データを伸張する際には、その所定ビットの内容に基づいて、データヘッダから始まる特例保存データEEがどのバイトまでか、そしてその後のバイトから再び保存データESであることを把握することができる。特例差分値は、可変長データの残りのビットを用いて表される。
【0053】
既に述べたように、発射時刻データの性質として、ほとんどの二次差分値は代表差分値となる。上述の処理P2〜P4により、代表差分値が連続する場合には4つの代表差分値が1バイトの保存データESで表される。すなわち、個々の二次差分値を保存データとして格納する場合よりも発射時刻データの圧縮効率の一層の向上が実現される。
【0054】
次に、ミラー回転角データθnに対する圧縮操作を説明する。縦軸にミラー回転角データθn、横軸にレーザパルスの発射順序をとった、レーザパルス発射順序-ミラー回転角線図は正弦曲線に近似可能であり、連続性に着目して、二次差分値を保存データとする。また、回帰線図が上述したレーザパルス発射時刻とは異なり、全領域に不連続点が存在しない。このため、跳躍点での差分値保存によってデータ長が過度に大きくなる心配がないので、SOBマークで区切られたデータブロックを設定する必要がなく、単に二次差分値を連ねるだけで足りる。二次差分値である各圧縮値から元データを算出可能とするために、圧縮データの最初に元データ、次に一次差分値が挿入され、これに続いて二次差分値が記述される。
【0055】
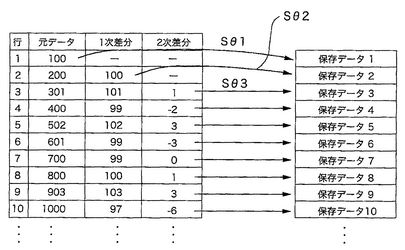
図11は、ミラー回転角データθnの圧縮例を示す模式図である。左側のテーブルは元データと演算経過を示し、このテーブルの中のどの要素が、その右に示す保存データ(圧縮データ)として格納されるかが示されている。元データは縦に並べて示されており、“行”コラムがレーザパルスの発射順序に対応し、例示のミラー回転角データθnは、1発目が100で、この後、200,301,400,…と続くことを示している。
【0056】
このような元データがある場合、まず、先頭の元データ“100”を保存データ1として抽出する(ステップSθ1)。この後、ステップSθ2で第2の元データ“200”と先頭元データ“100”との一次差分を演算し、その演算結果“100”を保存データ2として保存データ1の後続データとして登録する。次いで、第3の元データ“301”と第2の元データ“200”との一次差分“101”と、上記ステップSθ2で求めた一次差分“100”とから求めた二次差分“1”を保存データ3として、保存データ2に続けて登録する(ステップSθ3)。以降、ステップSθ3と同様の手順を繰り返し、二次差分を順次、保存データとして登録して処理を完了する。
【0057】
図12は、以上の手順により得られる圧縮データの二次差分収納分のデータフォーマットを示す模式図である。上述したように、このデータフォーマットの前に第1の元データ、一次差分データが存在するが、ここでは図示が省略されている。図12に示すように、二次差分は、小さな値であるので6ビット程度で表現可能であり、これに2種類の状態判定ビットを付加した8ビット(1バイト)長で格納される。
【0058】
上記状態判定ビットは各々1ビット長を持つ正負判定ビットとエラー判定ビットである。正負判定ビットは、二次差分の正負により決定される。また、エラー判定ビットは、6ビット長で記述不可能な場合をエラー値として格納したことを示す。本実施形態において、エラービットが立っている状態では、二次差分は2バイト長拡張された領域に格納される。
【0059】
図13〜図15を用いてリターンパルスPknの圧縮手順を説明する。図13は、圧縮処理の流れを示す模式図であり、上段の枠内は図4で示した分離データ列SD(P)である。図13に示すように、分離データ列SD(P)には、1発のレーザパルスに対して5個のリターンパルスデータ(P1n,P2n,…,P5n)の領域が確保され、リターンパルスデータPknのない部分には“0”が格納されている。図2に示すように、リターンパルスは森林等における樹木での葉の間から漏れたレーザパルスが、さらに地表側に位置する他の反射物に反射して得られるもので、全ての領域が埋まることは比較的少なく、さらに“0”等の小さな値で“値なし”を示す場合であっても、そうでない他のリターンパルスデータの値を格納するのと同じ所定のビット長の領域が割り当てられる。
【0060】
このようなデータ構造に伴うデータの冗長性を解消するために、まず、データ構造を変更する(ステップSP1)。ステップSP1の実施に際して、n発目のレーザパルスに対するリターンパルスデータ群(P1n,P2n,…,P5n)を格納する領域中でのデータ充填を表示するヘッダ情報“Head_n”を導入し、“値なし”データを削除する。本実施形態において、ヘッダ情報Head_nには1バイトの領域が与えられ、下位5ビットで最終次数及びリターンパルスデータ格納位置を示す。例えば、1次リターンパルスデータP1nのみが存在し、2次以降が“値なし”である場合には、ヘッダ情報Head_nは“00000001”で与えられ、3次リターンパルスデータP3nまで存在し、かつ2次リターンパルスが存在せず、1次及び3次のリターンパルスが存在するときには“00000101”、全て埋まっている場合には、“00011111”で与えられる。この結果、データ列は、図13の中段の枠内に示すように、ヘッダ情報Head_nと実データとにより記述されることとなる。
【0061】
次いで、データ間の差分をとって保存データとする(ステップSP2)。ステップSP2は、Q計算とR計算とを行いながら保存データを決定していき、圧縮データ列は、図13の下段の枠内に示すように、パルス番号“n”に対するヘッダ情報Head_n、Q値“Q1n”、R値“Rkn”の順に格納される。R値Rknの添え字“k”はリターン次数を示す。後述するように、1次のリターンパルスデータP1nに対しては、直前の1次リターンパルスデータ(P1,n-1)との差分であるQ値Q1nを保存データとするので、kは2以上5以下の整数となる。
【0062】
Q計算及びR計算を図14、図15に示す例で説明する。ここで、図14は分離データ列SD(P)の具体的な例を示す模式図である。また、図15は、図14の分離データ列に対応して生成される保存データの模式図である。
【0063】
図14に示す元データでは、レーザパルス番号“1”に対して1次リターンパルスのみが得られ、その値は“100”であることが示されている。また、レーザパルス番号“7”に対しては5次までのリターンパルスが捕捉され、その値は、1次側から、“700,800,810,820,850”であることが示されている。
【0064】
まず、初期情報として、レーザパルス番号“1”のリターンパルスは1次のみが取得されているので、ヘッダ情報Head_nに“00000001”を格納した後、1次リターンパルスデータP11として“100”をそのまま格納する。説明を容易にするために、保存データはk行n列の配列Cmp、元データはk行n列の配列Orgを用いて表す。例えば、先頭データ“100”が保存データとして格納されたことは、Cmp(1,1)にOrg(1,1)が代入されていることで知ることができる。
【0065】
ここで、ヘッダ情報Head_1は1次パルスデータのみを格納していることを示していることから、この後、2次リターンパルスを検索することなく、1発目のレーザパルスに対する処理が終了し、次に2発目(n=2)のレーザパルスの処理に移行する。
【0066】
n=2以降では、まずQ値計算を行う。Q計算は、隣接するレーザパルスに対する1次リターンパルス間の差分を求める演算であり、
Q1n=P1n−P1,n-1
で与えられる。
【0067】
この例では、n=2であるから、
Q12=P12−P11
=Org(1,2)−Org(1,1)
=200−100=100
で与えられ、これがCmp(1,2)に代入される。
【0068】
Q計算が終了すると、同一のn値でR計算を行う。R計算はOrg配列の同一行での隣接値間の差分を取る演算であり、
Rkn=Pkn−Pk-1,n
で与えられる。図14、図15の例では、
R22=P22−P12
=Org(2,2)−Org(1,2)
=300−200=100
がCmp(2,2)に代入される。
【0069】
R計算は、同一レーザパルス番号のリターンパルスデータPknが終了するまで続けられ、この後、上述した手順、すなわち、ヘッダ情報Head_nの付与、1回のQ計算、適数回のR計算が繰り返される。
【0070】
このようにして得られたCmp配列は一次元配列(ビット列)に並べられ、圧縮対象のデータ列にされる。
【0071】
以上のようにして各々の分離データ列SDに対する圧縮処理が終了すると、結合処理がなされて1ファイルにまとめられ、次いで、図3に示す符号化処理部11cにおける符号化処理を行う(ステップS4)。符号化処理にはエントロピー符号化等が利用できる。
【0072】
符号化処理が終了すると、まず、データ伝送中にて地上基地局での解析を可能とするためにストリーミング部12におけるストリーミングが行われ(ステップS5)、次いで伝送データ変換処理部13において搬送波の整形が行われ(ステップS6)、出力部14から伝送される(ステップS7)。
【0073】
なお、以上の実施形態では、パルスデータのみが圧縮処理され、GPS/IMUデータについてはそのまま直接伝送する構成を示したが、GPS/IMUデータについても圧縮処理を行って伝送するように構成することも可能である。ちなみに、GPS/IMUデータは計測航路への旋回、移動の期間を使用して伝送することができる。
【0074】
また、上記送信部6及びパルスデータ生成部9、GPS/IMUデータ生成部10は、コンピュータに当該機能を発揮させるコンピュータプログラムを使用して達成可能である。
【0075】
図16は、飛行体からの伝送情報を受領する地上基地局のブロック図である。地上基地局は受信処理部15と復元処理部16とからなるデータ再生部7を有する。受信処理部15の受信部15aで上記飛行体1からの圧縮データを受信すると、受信しながら後段のデータ解析を行うことができるように、ストリーミング処理部15bにおいてストリーミング処理を行い(ステップSG1)、復元処理部16の復号部16aへ出力する(ステップSG2)。
【0076】
図17は、圧縮データの復元処理を示す説明図である。復号部16aでは、上記圧縮データファイルの符号化と結合化を解除して符号化前の状態に戻し、さらに、復元部16bで復元処理を行う(ステップSG3)。復元処理により、図17の中段に示すように、発射時刻データTn、ミラー回転角データθn及びリターンパルスデータPknは各々分離データ列SDの状態となり、これをデータ結合部16cにおいてデータ結合すると(ステップSG4)、図17の下段に示すように、パルスデータ生成部9からの出力が再現される。
【0077】
この結合データは、データ解析部5において解析されて、リターンパルス群による計測結果が演算される。解析に際して、観測データは一旦、パルスデータ・GPS/IMUデータ格納部5aに格納され(ステップSG5)、実距離化・座標化処理部5bで実位置等が演算される(ステップSG6)。実距離化・座標化処理部5bは、飛行体1の光学系の特性に基づく内部評定要素、及びGPS/IMUデータに基づく外部評定要素を利用してリターンパルスの反射部の所定投影空間上での位置、高さを演算する。なお、一般にGPS/IMUからのデータ数は、レーザパルス発射数に比して小数であり、一対一対応しないために、上述したように、添え字“n”に対応するレーザデータ以外のレーザデータに対する外部評定要素には、取得されたGPS/IMUデータに対する補間値が使用される。
【0078】
このようにして得られた各ポイントデータは三次元情報を有しているために、これを使用して地表面を点描状に表示することも可能であり、これらの用に供するために、ポイントデータはポイントデータ格納部17に格納される(ステップSG7)。
【0079】
さらに本実施形態において、地上基地局には3D処理部18が設けられる。3D処理部18は、上記ポイントデータ群をもとに、例えば、三次元ポリゴン、テクスチャ等を備えた3D画像を形成するための3Dデータ生成部18aを備える。この3Dデータ生成部18aでの生成データは生成3Dデータ18bに格納され、所望により3Dデータ表示部18cで表示される。
【0080】
また、地上基地局には、即応性を利用して例えば地殻変動、災害等の情報を直ちに得ることができるように、比較部19を備える。比較部19は、既存3Dデータ19aと差分データ生成部19bと、上記3Dデータ表示部18cとを有して構成される。3Dデータ生成部18aからの出力は、差分データ生成部19bにおいて既存3Dデータ19aとの比較が行われ、画像上の相違点を検出する。検出結果は、上記3Dデータ表示部18cに表示し、必要に応じて上空の飛行体1に再計測、或いは計測範囲の拡大等を指示することができる。
【0081】
なお、以上において、データ再生部7、データ解析部5、3D処理部18及び比較部19は、当該機能を発揮させるようにコンピュータを動作させるコンピュータプログラムによっても達成可能である。
【図面の簡単な説明】
【0082】
【図1】航空機、ヘリコプター等の飛行体を使用したレーザ計測の概要を示す説明図である。
【図2】リターンパルスを示す説明図である。
【図3】レーザ計測部及び送信部の構成を示すブロック図である。
【図4】パルスデータ生成部からのデータの出力フォーマットを示す模式図である。
【図5】GPS/IMUデータ生成部からのデータの出力フォーマットを示す模式図である。
【図6】レーザ発射時刻データの変化を示すグラフである。
【図7】圧縮処理部における発射時刻データの圧縮処理の概要を示すブロック図である。
【図8】レーザパルス発射時刻データTnの圧縮処理における二次差分値列生成処理P1を示す概略のフロー図である。
【図9】対応付け処理P3で用いるインデックステーブルTBLの構造を示す模式図である。
【図10】圧縮データ形成処理P4を説明する模式図である。
【図11】ミラー回転角データθnの圧縮例を示す模式図である。
【図12】圧縮データの二次差分収納分のデータフォーマットを示す模式図である。
【図13】ミラー回転角データθnの圧縮処理の流れを示す模式図である。
【図14】分離データ列SD(P)の具体的な例を示す模式図である。
【図15】図14の分離データ列に対応して生成される保存データの模式図である。
【図16】飛行体からの伝送情報を受領する地上基地局のブロック図である。
【図17】圧縮データの復元処理を示す説明図である。
【符号の説明】
【0083】
1 飛行体、2 レーザスキャナ、3 データブロック、4 レーザ計測部、5 データ解析部、6 送信部、7 データ再生部、11 圧縮部、11a データ分離部、11b 圧縮処理部、11c 符号化処理部。
【技術分野】
【0001】
本発明は、飛行体と地上との間で行うレーザ計測方法及びそれを用いたレーザ計測システムに関し、特にレーザパルスの発射時刻データの圧縮伝送に関する。
【背景技術】
【0002】
航空機等の飛行体からレーザビームを照射して地上の凹凸情報を取得するレーザ計測方法として、下記特許文献1に記載されるものが知られている。一般に、航空機上で取得される観測データは、発射するレーザパルス単位に発射時刻、発射位置、発射方向、複数のリターンパルスに関する情報を含み、データサイズが膨大なものとなる。そのため、従来技術においては、航空機上で取得されたデータは、航空機に搭載したデータ記録部に格納され、計測終了後に地上のデータ処理装置に移され処理、解析される。
【0003】
しかし、例えば、災害時における地上の状況把握等のような利用目的では、即応性が要求される。そこで、航空機の着陸を待たずにデータ解析を行うことを可能とするレーザ計測システムの開発が進められている。
【特許文献1】特開2003−156330号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
即応性を高めるには、航空機上で取得される膨大な観測データを無線伝送で地上に送ることが要求されるが、当該データを限られた伝送容量で短時間に地上に送ることが難しいという問題があった。この問題に対しては、当該データを圧縮して伝送し、地上にて伸張するという方法を採りうる。圧縮効率は各種データの性質にも依存し、それを如何に高めるかはデータ種類毎に個別に検討すべき課題となる。
【0005】
本発明は、特に、レーザパルスの発射時刻データに関して圧縮効率を高め、地上への迅速なデータ伝送を実現し、即応性の高いレーザ計測方法及びレーザ計測システムの提供を目的とする。
【課題を解決するための手段】
【0006】
本発明に係るレーザ計測方法は、飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得する観測ステップと、前記観測データを地上基地局に伝送する伝送ステップと、前記飛行体の飛行中に前記地上基地局において前記観測データを解析して地表形状を演算する演算ステップとを含むレーザ計測方法であって、前記伝送ステップが、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮ステップを有し、前記圧縮ステップが、前記発射時刻データのデータ列から二次差分値列を生成する差分ステップと、前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付けステップと、前記対応付けステップにて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成ステップと、を有し、前記数値列パターンの集合が、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含む。
【0007】
本発明の好適な態様は、前記代表差分値が、−1、0、及び+1であるレーザ計測方法である。
【0008】
他の本発明に係るレーザ計測方法においては、前記mが3であり、前記kが2であり、前記数値列パターンの集合が、前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である3通りの特例パターンを含む。
【0009】
また他の本発明に係るレーザ計測方法においては、前記指標データが、4ビットのバイナリデータで表され、前記形成ステップが、前記対応付けステップにて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合ステップを有する。
【0010】
別の本発明に係るレーザ計測方法においては、前記kが2であり、前記結合ステップが、前記第1指標データが対応付けられた前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である場合又は前記第2指標データが存在しない場合に、当該第1指標データに、いずれの前記指標データとも識別可能な4ビットの例外識別データを結合して1バイトの前記圧縮データを生成する。
【0011】
また別の本発明に係るレーザ計測方法においては、前記形成ステップが、前記圧縮データに格納された前記二次差分値のうち前記代表差分値以外の特例差分値を、当該圧縮データと後続の前記圧縮データとの間に所定のフォーマットで挿入する挿入ステップを有する。
【0012】
本発明に係るレーザ計測システムは、飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得し、前記観測データを送信する機上装置と、地上に設置され、前記観測データを前記飛行体の飛行中に前記機上装置から受信し解析して地表形状を演算する地上装置と、を有し、前記機上装置が、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮手段を有し、前記圧縮手段が、前記発射時刻データのデータ列から二次差分値列を生成する差分手段と、前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付け手段と、前記対応付け手段にて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成手段と、を有し、前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むものである。
【0013】
他の本発明に係るレーザ計測システムにおいては、前記指標データが、4ビットのバイナリデータで表され、前記形成手段が、前記対応付け手段にて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合手段を有する。
【発明の効果】
【0014】
本発明によれば、発射時刻データの複数の二次差分値を1つの指標データで表すことにより、発射時刻データの圧縮効率が一層向上し、即応性が向上したレーザ計測方法及びレーザ計測システムが実現される。
【発明を実施するための最良の形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。
【0016】
図1は、航空機、ヘリコプター等の飛行体を使用したレーザ計測の概要を示す説明図である。飛行体1は、レーザ計測部4及び送信部6を搭載し、レーザ計測部4はレーザスキャナ2、反射波受信センサ8、及びGPS/IMU(Global Positioning System/Inertial Measurement Unit)を含んで構成される。
【0017】
レーザスキャナ2は、制御部(図示せず)により、所定時間間隔でレーザパルスを発射するレーザ発射部2aと、レーザパルスを所定角度範囲内で振って地上のスキャンを可能とする回転ミラー2bとを備える。レーザの発射パルスに対する地表からの反射パルス(リターンパルス)は反射波受信センサ8により検出される。
【0018】
図2は、リターンパルスを示す説明図である。発射された1発のレーザパルスに対して、地上物による複数回(通常1ないし5回程度)の反射が生じ、それに応じてリターンパルスも複数回検出され得る。反射波受信センサ8は、n発目の発射パルスに対するk番目のリターンパルスの捕捉時刻情報をリターンパルスデータPknとして出力する。また、GPS/IMUは、レーザスキャナ2のレーザパルス発射タイミングに同期して、レーザパルス発射時の飛行体1のGPS位置、傾き情報等を出力する。
【0019】
なお、レーザデータ及びGPS位置、傾き情報はレーザ計測部4の構造により適宜無次元化された数値として出力されるものであってもよく、またレーザパルス発射時刻、或いはリターンパルスデータ等の時刻情報、例えば、計測開始からの経過時間であってもよい。
【0020】
これらリターンパルスデータPkn、GPS/IMU情報に加えて、レーザパルスの発射時刻データTn、そのときの回転ミラー2bの回転角データθnが観測データとして取得され、観測データは送信部6から地上基地局へ無線伝送される。後述するように、地上基地局では、GPS/IMU情報を評定要素として、リターンパルスデータPknを中心とする観測データにより飛行体1と地表面との距離を演算し、地表の位置、高さを演算する。
【0021】
図3はレーザ計測部4及び送信部6の構成を示すブロック図である。上述したようにレーザ計測部4は、レーザスキャナ2、反射波受信センサ8、及びGPS/IMUを備え、レーザスキャナ2及び反射波受信センサ8における観測データはパルスデータ生成部9に出力され、またGPS/IMUにおける観測データはGPS/IMUデータ生成部10へ出力される。
【0022】
図4は、パルスデータ生成部9からのデータの出力フォーマットを示す模式図である。また図5は、GPS/IMUデータ生成部10からのデータの出力フォーマットを示す模式図である。パルスデータ生成部9は、上述したように、発射パルス(レーザパルス)を単位として、当該発射パルスに対応する各出力値を所定の順序で配列したデータ列を出力する。図4に示す例は、各発射パルスに対して最大5次までのリターンパルスデータPknが取得され得ることを想定した場合のデータフォーマットを示すものであり、先頭からレーザパルスの発射時刻データTn、ミラー回転角データθn、及びリターンパルスデータPknの順に格納される。ちなみに、上述したように、リターンパルスデータPknは必ずしも5次まで取得されるとは限らないため、取得されなかった次数の格納位置には、例えば“0”を格納する(図14参照)。
【0023】
一方、GPS/IMUデータ生成部10からは、図5に示すように、GPS時間TAn、IMU時間TBn、x方向加速度VXn、x方向角度AXn、y方向加速度VYn、y方向角度AYn、z方向加速度VZn、z方向角度AZnが出力される。これらGPS/IMUデータ生成部10からの出力値は、パルス番号を表す添え字“n”を介して、パルスデータ生成部9の出力値と対応付けられる。
【0024】
飛行体1におけるレーザ計測が開始されると、レーザ計測部4にて取得される観測データは、パルスデータ生成部9或いはGPS/IMUデータ生成部10へ出力される。パルスデータ生成部9及びGPS/IMUデータ生成部10は、入力された観測データから所定のデータ列を生成し送信部6の圧縮部11へ出力する(ステップS1)。
【0025】
圧縮部11は、データ分離部11a、圧縮処理部11b及び符号化処理部11cを含んで構成され、入力されたデータを圧縮する。この圧縮処理は、即時性の向上を図るために、データ全体の容量に対し、例えば、4Mバイト程度の比較的小さな単位で行われる。
【0026】
データ分離部11aは、図4に示すように、パルスデータ生成部9から出力されたパルスデータを、レーザパルス発射時刻データTn、ミラー回転角データθn及びリターンパルスデータPknの3種類のデータ列SD(T)、SD(θ)及びSD(P)に分割し(ステップS2)、これら各分離データSDを圧縮処理部11bへ出力する。図4に示すように、分離データ列SD(T)及びSD(θ)それぞれにおけるレーザパルス発射時刻データTn、ミラー回転角データθnは、パルス発射順に並ぶ。また、分離データ列SD(P)におけるリターンパルスデータPknは、パルス発射順が同じ5個のデータからなるデータ群がパルス発射順に並び、各データ群の中では、5個のデータが反射次数順に並んだフォーマットを有する。この分離データSD(P)には、必要に応じて、データ群の境界にデータ終端マークが挿入される。
【0027】
圧縮処理部11bは、各分離データ列SDの特徴を利用して、それぞれ異なったアルゴリズムでデータ圧縮を行う(ステップS3)。図6は、レーザ発射時刻データの変化を示すグラフであり、横軸がレーザパルス発射順序、縦軸が発射時刻である。この図に示されるように、レーザパルス発射順序に対して発射時刻は、周期的に繰り返す右上がりの直線上に分布する傾向がある。この性質から、隣接する発射時刻データTnの二次差分値は0近傍に分布する小さな値となることが期待され、この二次差分値を用いることにより発射時間データの圧縮を図ることができる。
【0028】
図7は、圧縮処理部11bにおける発射時刻データの圧縮処理の概要を示すブロック図である。圧縮処理部11bは、まず、二次差分値列を順次、生成し(処理P1)、生成される二次差分値を順番に2つずつ組み合わせた二次差分値対を生成する(処理P2)。圧縮処理部11bは、二次差分値対に現れる数値列パターンと指標データとの関連付けを定義するインデックステーブルTBLを予め設定し、処理P2で生成された二次差分値対とテーブルTBLに登録された指標データとの対応付け処理を行う(処理P3)。この処理では、二次差分値対と一致する数値列パターンがテーブルTBLに存在する場合に、その二次差分値対に、当該数値列パターンに対応する指標データが対応付けられる。圧縮処理部11bは、この指標データを用いて圧縮データを形成する(処理P4)
【0029】
図8は、レーザパルス発射時刻データTnの圧縮処理における二次差分値生成処理P1を示す概略のフロー図である。なお、以下の説明において、記号“Tn”はn発目のレーザパルスの発射時刻、記号“Δ1,n”は発射時刻Tnの一次差分値(Tn+1)−(Tn)、記号“Δ2,n”は発射時刻Tnの二次差分値(Δ1,n+1)−(Δ1,n)を表す。
【0030】
二次差分値列S(Δ2,n)の生成に際し、まず、二次差分値列生成用のバッファエリアBUFをメモリ上に設定し、先頭にSOB(Start of Block)マークを挿入する(ステップST1)。SOBは予め定められた所定のビット長を有しており、以下の処理で出現することのないコードに設定される。この後、SOBマークの後にレーザパルスの発射時刻Tnを挿入する。このTnは、二次差分値列から元の発射時刻の分離データ列SD(T)を復元する際に用いられる。
【0031】
次に、一次差分値Δ1,nを算出し(ステップST2)、その正負を判定する(ステップST3)。上述したように、発射時刻データTnは周期的に繰り返す右上がりの直線上に分布する傾向があるため、一次差分値の符号が正の場合には、その一次差分値の関係するTn+1とTnとは同じ直線に沿って位置し、一方、一次差分値の符号が負の場合には、Tn+1とTnとの間で直線の乗り換えが生じ、Tn+1は次の直線に沿って位置していると考えられる。
【0032】
符号が負の場合には、パルス番号nを1だけ増加させ、ステップST1から処理を繰り返す。すなわち、改めてSOBマークをバッファリングされているデータの後尾の挿入し、続けてTnを挿入する。例えば、直前のステップST1からの処理がn=kに対するものでありTkを挿入した後、(Tk+1)−(Tk)<0であった場合には、次のステップST1からの処理においては、SOBマークの次にTk+1が挿入される。
【0033】
ちなみに、一次差分値の符号が負の場合には上述のようにSOBマークが挿入され、このSOBマークは評価対象のT値が直前のT値が帰属する直線からはずれて新たな回帰直線に移動したことを示すこととなる。すなわち、SOBマークは、それぞれ1つの直線に対応するデータブロックのデリミタとしての意味を有する。
【0034】
一方、符号が正の場合には、求めた一次差分値Δ1,nを直前に挿入されたTnの後に挿入する(ステップST4)。このΔ1,nは、直前に挿入されているTnと共に、二次差分値列から元の発射時刻の分離データ列SD(T)を復元する際に用いられる。
【0035】
符号が正の場合、さらに一次差分値Δ1,n+1を求める(ステップST5)。この一次差分値Δ1,n+1についてもステップST3と同様の理由から符号の判定が行われ(ステップST6)、符号が負の場合には、パルス番号nを2だけ増加させステップST1から処理を繰り返し、新たなデータブロックの生成が開始される。
【0036】
Δ1,n+1の符号が正の場合には、二次差分値Δ2,nを求め(ステップST7)、ステップST4で挿入したΔ1,nの後に当該Δ2,nを挿入する(ステップST8)。二次差分値の生成は、nを1ずつ増加させながら(ステップST9)、繰り返され、上述のようにT値が次の直線に帰属することになるか(ステップST6)、T値の終わりに達するまで(ステップST10)、順次、二次差分値がバッファされる。
【0037】
なお、発射時刻データTnの観測精度によっては図6の直線が多少変動する場合がある。この場合、一次差分値が負でかつその絶対値が所定値より大きい場合には、Tn+1とTnとの間で直線の乗り換えが生じているものと判断する。一方、一次差分値が正、または一次差分値が負でかつその絶対値が所定値以下の場合には、Tn+1とTnが同じ直線に沿って位置しているものと判断する。
【0038】
元の時刻データTnは大きな値を取り得るが、二次差分値Δ2,nは、上述のように0近傍の小さな値であり、元の時刻データTnに比べて短いデータ長で表すことができる。例えば、元のデータTnが4バイトを要するとしても、基本的に二次差分値Δ2,nは1バイトで表現することが可能である。すなわち、二次差分値は既に圧縮されていると言える。しかし、圧縮処理部11bは、バッファに次々と挿入される二次差分値を、これから述べる処理P2〜P4によりさらに圧縮し、保存データを生成する。以下、この二次差分値列の圧縮処理について説明する。
【0039】
図9は処理P3で用いるインデックステーブルTBLの構造を示す模式図である。図には、左欄に示すインデックスIに対応する二次差分値対の1つ目の値(先行二次差分値Δ2P)、2つ目の値(後続二次差分値Δ2F)、及び保存データ要素Eが横方向に配列されている。ここで、二次差分値は既に述べたように、0近傍にほとんどが分布する。経験的に、二次差分値列において−1,0,+1が高い出現確率で現れる。そこで、本実施形態では、二次差分値列における出現確率が所定値以上である代表差分値として、−1,0,+1を設定し、これに対応して、インデックステーブルが定義されている。EはIをバイナリ表示したデータである。後述するようにインデックスIは13種類であるので、Eは実質的に4ビットで表現可能である。
【0040】
インデックスI=0〜5及び10〜12は、Δ2P、Δ2Fからなる数値パターンが、3種類の代表差分値(−1,0,+1)を2個並べる9通りの順列パターンに対応する。
【0041】
インデックスI=6〜8は、Δ2Pが3種類の代表差分値(−1,0,+1)のいずれかであり、Δ2Fが代表差分値以外の値(Δ2Fが存在しない場合を含む)である3つの特例パターンである。図9において、代表差分値以外であることは記号“NULL”で表されている。
【0042】
インデックスI=9は、例外的な場合に用いられる例外識別データを定義するものである。ここで例外的な場合の1つは、Δ2Pとして取り出した二次差分値が代表差分値以外である場合(特例差分値)である。この場合には、後続する二次差分値をΔ2Fとして組み合わせることなく、Δ2Pとして取り出した二次差分値だけを以て、インデックスIとして9を割り当てる。例外的な場合のもう1つは、Δ2P、Δ2Fのいずれも存在しないことを表す場合である。
【0043】
圧縮処理部11bは、圧縮処理P1〜P4の開始に際して、圧縮データ格納用のデータエリアSTRをメモリ上に設定する。圧縮処理部11bは、二次差分値列生成処理P1において、上述のバッファBUFへのデータ格納を行う一方、処理P2〜P4において、当該バッファBUFから順次、データを取り出し処理を行う。
【0044】
圧縮処理部11bは、処理P2において、バッファBUFから取り出したデータがSOBマーク、Tn、Δ1,nである場合は、それらデータをそのままデータエリアSTRに転写する。
【0045】
一方、バッファBUFから取り出したデータが二次差分値Δ2,nである場合には、圧縮処理部11bはさらにそれに続く二次差分値Δ2,n+1も取り出し、二次差分値対を生成し(処理P2)、テーブルTBLのΔ2P、Δ2Fからなるパターンとのマッチングを行って当該二次差分値対に対応する保存データ要素E1を決定する(処理P3)。
【0046】
二次差分値対が代表差分値の組み合わせであるI=0〜5、10〜12であった場合、圧縮処理部11bは、原則として、さらに後続する二次差分値Δ2,n+2、Δ2,n+3からなる二次差分値対について同様に保存データ要素E2を決定する。そして、E1を上位4ビット、E2を下位4ビットとして両者を結合して1バイトの保存データESを生成し、これを圧縮データ格納用データエリアSTRに追加格納する(処理P4)。
【0047】
図10は、圧縮データ形成処理P4を説明する模式図である。図10(a)〜(c)が、上述した先行する二次差分値対のインデックスIが0〜5,10〜12である場合を表している。図10(a)(b)は4つの二次差分値に基づいて保存データESが生成される原則的な場合に対応し、図10(a)は、後続の二次差分値対のインデックスIも0〜5,10〜12である場合であり、図10(b)は、後続の二次差分値対のインデックスIが6〜8である場合である。
【0048】
一方、図10(c)(d)は、3つ、又は2つの二次差分値に基づいて保存データESが生成される例外的な場合であり、保存データ要素E2として、インデックスI=9に対応するデータが割り当てられる。そして、図10(a)(b)の場合と同様、E1を上位4ビット、E2を下位4ビットとして両者を結合して1バイトの保存データESが生成され、これが圧縮データ格納用データエリアSTRに追加格納される(処理P4)。
【0049】
ここで、図10(c)は、Δ2,n+2として取り出した二次差分値が代表差分値以外であった場合である。後述するように、代表差分値以外の二次差分値(特例差分値)が現れた場合、処理P4の一部として、当該特例差分値をデータエリアSTRに格納する処理が行われ、後続の二次差分値についての処理はその特例差分値を格納する処理後に継続される。そのため、当該Δ2,n+2として取り出した二次差分値の後続の二次差分値はΔ2,n+3としては取り出さず、保存データ要素E2としてインデックスI=9に対応するデータを割り当てる。
【0050】
また、図10(d)は、Δ2,n+1が特例差分値である場合である。この場合も、特例差分値を格納する処理に移行する都合上、後続の二次差分値はΔ2,n+2、Δ2,n+3として取り出さず、保存データ要素E2としてインデックスI=9に対応するデータを割り当てる。
【0051】
ちなみに、図10(b)に示す場合は、Δ2,n+3が特例差分値であり、この保存データESをデータエリアSTRに格納した後、特例差分値の格納処理が行われる。また、Δ2,nが特例差分値であった場合が図10には示されていないが、この場合は、保存データ要素の組み合わせからなる保存データESは生成せずに、直接、先行する保存データESに続けて、当該特例差分値が追加格納される。
【0052】
特例差分値の格納処理は、先行する保存データES及び後続する保存データESとの間に挿入されたことが識別可能な所定のフォーマットのデータ(特例保存データEE)をデータエリアSTRに追加する処理である。例えば、特例保存データEEの第1バイトはいずれの保存データESとも区別可能なデータヘッダとする。例えば、データヘッダは“0xFF”とすることができる。データヘッダに続けて、1〜4バイトの可変長データを追加する。可変長データのデータ長は例えば、第2バイトのいくつかの所定ビットを用いて表すように定義される。地上基地局側で圧縮データを伸張する際には、その所定ビットの内容に基づいて、データヘッダから始まる特例保存データEEがどのバイトまでか、そしてその後のバイトから再び保存データESであることを把握することができる。特例差分値は、可変長データの残りのビットを用いて表される。
【0053】
既に述べたように、発射時刻データの性質として、ほとんどの二次差分値は代表差分値となる。上述の処理P2〜P4により、代表差分値が連続する場合には4つの代表差分値が1バイトの保存データESで表される。すなわち、個々の二次差分値を保存データとして格納する場合よりも発射時刻データの圧縮効率の一層の向上が実現される。
【0054】
次に、ミラー回転角データθnに対する圧縮操作を説明する。縦軸にミラー回転角データθn、横軸にレーザパルスの発射順序をとった、レーザパルス発射順序-ミラー回転角線図は正弦曲線に近似可能であり、連続性に着目して、二次差分値を保存データとする。また、回帰線図が上述したレーザパルス発射時刻とは異なり、全領域に不連続点が存在しない。このため、跳躍点での差分値保存によってデータ長が過度に大きくなる心配がないので、SOBマークで区切られたデータブロックを設定する必要がなく、単に二次差分値を連ねるだけで足りる。二次差分値である各圧縮値から元データを算出可能とするために、圧縮データの最初に元データ、次に一次差分値が挿入され、これに続いて二次差分値が記述される。
【0055】
図11は、ミラー回転角データθnの圧縮例を示す模式図である。左側のテーブルは元データと演算経過を示し、このテーブルの中のどの要素が、その右に示す保存データ(圧縮データ)として格納されるかが示されている。元データは縦に並べて示されており、“行”コラムがレーザパルスの発射順序に対応し、例示のミラー回転角データθnは、1発目が100で、この後、200,301,400,…と続くことを示している。
【0056】
このような元データがある場合、まず、先頭の元データ“100”を保存データ1として抽出する(ステップSθ1)。この後、ステップSθ2で第2の元データ“200”と先頭元データ“100”との一次差分を演算し、その演算結果“100”を保存データ2として保存データ1の後続データとして登録する。次いで、第3の元データ“301”と第2の元データ“200”との一次差分“101”と、上記ステップSθ2で求めた一次差分“100”とから求めた二次差分“1”を保存データ3として、保存データ2に続けて登録する(ステップSθ3)。以降、ステップSθ3と同様の手順を繰り返し、二次差分を順次、保存データとして登録して処理を完了する。
【0057】
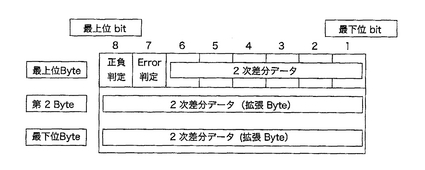
図12は、以上の手順により得られる圧縮データの二次差分収納分のデータフォーマットを示す模式図である。上述したように、このデータフォーマットの前に第1の元データ、一次差分データが存在するが、ここでは図示が省略されている。図12に示すように、二次差分は、小さな値であるので6ビット程度で表現可能であり、これに2種類の状態判定ビットを付加した8ビット(1バイト)長で格納される。
【0058】
上記状態判定ビットは各々1ビット長を持つ正負判定ビットとエラー判定ビットである。正負判定ビットは、二次差分の正負により決定される。また、エラー判定ビットは、6ビット長で記述不可能な場合をエラー値として格納したことを示す。本実施形態において、エラービットが立っている状態では、二次差分は2バイト長拡張された領域に格納される。
【0059】
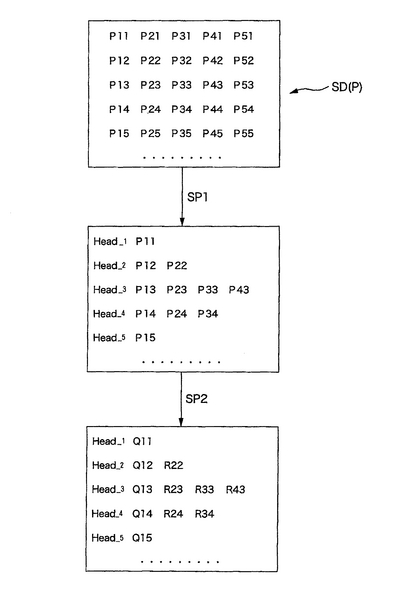
図13〜図15を用いてリターンパルスPknの圧縮手順を説明する。図13は、圧縮処理の流れを示す模式図であり、上段の枠内は図4で示した分離データ列SD(P)である。図13に示すように、分離データ列SD(P)には、1発のレーザパルスに対して5個のリターンパルスデータ(P1n,P2n,…,P5n)の領域が確保され、リターンパルスデータPknのない部分には“0”が格納されている。図2に示すように、リターンパルスは森林等における樹木での葉の間から漏れたレーザパルスが、さらに地表側に位置する他の反射物に反射して得られるもので、全ての領域が埋まることは比較的少なく、さらに“0”等の小さな値で“値なし”を示す場合であっても、そうでない他のリターンパルスデータの値を格納するのと同じ所定のビット長の領域が割り当てられる。
【0060】
このようなデータ構造に伴うデータの冗長性を解消するために、まず、データ構造を変更する(ステップSP1)。ステップSP1の実施に際して、n発目のレーザパルスに対するリターンパルスデータ群(P1n,P2n,…,P5n)を格納する領域中でのデータ充填を表示するヘッダ情報“Head_n”を導入し、“値なし”データを削除する。本実施形態において、ヘッダ情報Head_nには1バイトの領域が与えられ、下位5ビットで最終次数及びリターンパルスデータ格納位置を示す。例えば、1次リターンパルスデータP1nのみが存在し、2次以降が“値なし”である場合には、ヘッダ情報Head_nは“00000001”で与えられ、3次リターンパルスデータP3nまで存在し、かつ2次リターンパルスが存在せず、1次及び3次のリターンパルスが存在するときには“00000101”、全て埋まっている場合には、“00011111”で与えられる。この結果、データ列は、図13の中段の枠内に示すように、ヘッダ情報Head_nと実データとにより記述されることとなる。
【0061】
次いで、データ間の差分をとって保存データとする(ステップSP2)。ステップSP2は、Q計算とR計算とを行いながら保存データを決定していき、圧縮データ列は、図13の下段の枠内に示すように、パルス番号“n”に対するヘッダ情報Head_n、Q値“Q1n”、R値“Rkn”の順に格納される。R値Rknの添え字“k”はリターン次数を示す。後述するように、1次のリターンパルスデータP1nに対しては、直前の1次リターンパルスデータ(P1,n-1)との差分であるQ値Q1nを保存データとするので、kは2以上5以下の整数となる。
【0062】
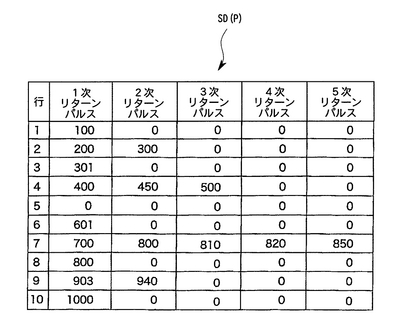
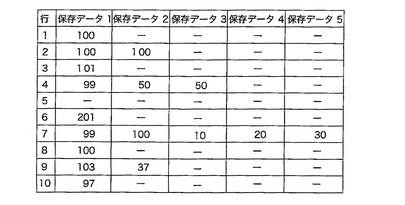
Q計算及びR計算を図14、図15に示す例で説明する。ここで、図14は分離データ列SD(P)の具体的な例を示す模式図である。また、図15は、図14の分離データ列に対応して生成される保存データの模式図である。
【0063】
図14に示す元データでは、レーザパルス番号“1”に対して1次リターンパルスのみが得られ、その値は“100”であることが示されている。また、レーザパルス番号“7”に対しては5次までのリターンパルスが捕捉され、その値は、1次側から、“700,800,810,820,850”であることが示されている。
【0064】
まず、初期情報として、レーザパルス番号“1”のリターンパルスは1次のみが取得されているので、ヘッダ情報Head_nに“00000001”を格納した後、1次リターンパルスデータP11として“100”をそのまま格納する。説明を容易にするために、保存データはk行n列の配列Cmp、元データはk行n列の配列Orgを用いて表す。例えば、先頭データ“100”が保存データとして格納されたことは、Cmp(1,1)にOrg(1,1)が代入されていることで知ることができる。
【0065】
ここで、ヘッダ情報Head_1は1次パルスデータのみを格納していることを示していることから、この後、2次リターンパルスを検索することなく、1発目のレーザパルスに対する処理が終了し、次に2発目(n=2)のレーザパルスの処理に移行する。
【0066】
n=2以降では、まずQ値計算を行う。Q計算は、隣接するレーザパルスに対する1次リターンパルス間の差分を求める演算であり、
Q1n=P1n−P1,n-1
で与えられる。
【0067】
この例では、n=2であるから、
Q12=P12−P11
=Org(1,2)−Org(1,1)
=200−100=100
で与えられ、これがCmp(1,2)に代入される。
【0068】
Q計算が終了すると、同一のn値でR計算を行う。R計算はOrg配列の同一行での隣接値間の差分を取る演算であり、
Rkn=Pkn−Pk-1,n
で与えられる。図14、図15の例では、
R22=P22−P12
=Org(2,2)−Org(1,2)
=300−200=100
がCmp(2,2)に代入される。
【0069】
R計算は、同一レーザパルス番号のリターンパルスデータPknが終了するまで続けられ、この後、上述した手順、すなわち、ヘッダ情報Head_nの付与、1回のQ計算、適数回のR計算が繰り返される。
【0070】
このようにして得られたCmp配列は一次元配列(ビット列)に並べられ、圧縮対象のデータ列にされる。
【0071】
以上のようにして各々の分離データ列SDに対する圧縮処理が終了すると、結合処理がなされて1ファイルにまとめられ、次いで、図3に示す符号化処理部11cにおける符号化処理を行う(ステップS4)。符号化処理にはエントロピー符号化等が利用できる。
【0072】
符号化処理が終了すると、まず、データ伝送中にて地上基地局での解析を可能とするためにストリーミング部12におけるストリーミングが行われ(ステップS5)、次いで伝送データ変換処理部13において搬送波の整形が行われ(ステップS6)、出力部14から伝送される(ステップS7)。
【0073】
なお、以上の実施形態では、パルスデータのみが圧縮処理され、GPS/IMUデータについてはそのまま直接伝送する構成を示したが、GPS/IMUデータについても圧縮処理を行って伝送するように構成することも可能である。ちなみに、GPS/IMUデータは計測航路への旋回、移動の期間を使用して伝送することができる。
【0074】
また、上記送信部6及びパルスデータ生成部9、GPS/IMUデータ生成部10は、コンピュータに当該機能を発揮させるコンピュータプログラムを使用して達成可能である。
【0075】
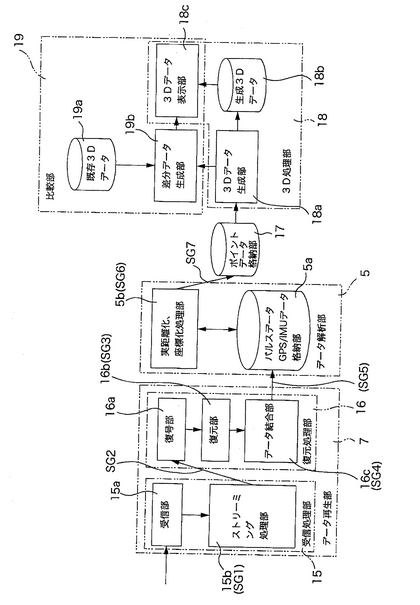
図16は、飛行体からの伝送情報を受領する地上基地局のブロック図である。地上基地局は受信処理部15と復元処理部16とからなるデータ再生部7を有する。受信処理部15の受信部15aで上記飛行体1からの圧縮データを受信すると、受信しながら後段のデータ解析を行うことができるように、ストリーミング処理部15bにおいてストリーミング処理を行い(ステップSG1)、復元処理部16の復号部16aへ出力する(ステップSG2)。
【0076】
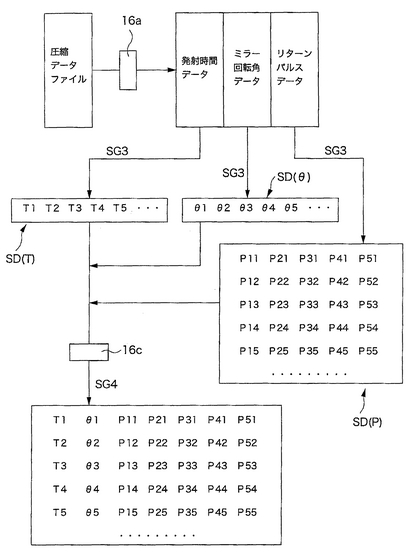
図17は、圧縮データの復元処理を示す説明図である。復号部16aでは、上記圧縮データファイルの符号化と結合化を解除して符号化前の状態に戻し、さらに、復元部16bで復元処理を行う(ステップSG3)。復元処理により、図17の中段に示すように、発射時刻データTn、ミラー回転角データθn及びリターンパルスデータPknは各々分離データ列SDの状態となり、これをデータ結合部16cにおいてデータ結合すると(ステップSG4)、図17の下段に示すように、パルスデータ生成部9からの出力が再現される。
【0077】
この結合データは、データ解析部5において解析されて、リターンパルス群による計測結果が演算される。解析に際して、観測データは一旦、パルスデータ・GPS/IMUデータ格納部5aに格納され(ステップSG5)、実距離化・座標化処理部5bで実位置等が演算される(ステップSG6)。実距離化・座標化処理部5bは、飛行体1の光学系の特性に基づく内部評定要素、及びGPS/IMUデータに基づく外部評定要素を利用してリターンパルスの反射部の所定投影空間上での位置、高さを演算する。なお、一般にGPS/IMUからのデータ数は、レーザパルス発射数に比して小数であり、一対一対応しないために、上述したように、添え字“n”に対応するレーザデータ以外のレーザデータに対する外部評定要素には、取得されたGPS/IMUデータに対する補間値が使用される。
【0078】
このようにして得られた各ポイントデータは三次元情報を有しているために、これを使用して地表面を点描状に表示することも可能であり、これらの用に供するために、ポイントデータはポイントデータ格納部17に格納される(ステップSG7)。
【0079】
さらに本実施形態において、地上基地局には3D処理部18が設けられる。3D処理部18は、上記ポイントデータ群をもとに、例えば、三次元ポリゴン、テクスチャ等を備えた3D画像を形成するための3Dデータ生成部18aを備える。この3Dデータ生成部18aでの生成データは生成3Dデータ18bに格納され、所望により3Dデータ表示部18cで表示される。
【0080】
また、地上基地局には、即応性を利用して例えば地殻変動、災害等の情報を直ちに得ることができるように、比較部19を備える。比較部19は、既存3Dデータ19aと差分データ生成部19bと、上記3Dデータ表示部18cとを有して構成される。3Dデータ生成部18aからの出力は、差分データ生成部19bにおいて既存3Dデータ19aとの比較が行われ、画像上の相違点を検出する。検出結果は、上記3Dデータ表示部18cに表示し、必要に応じて上空の飛行体1に再計測、或いは計測範囲の拡大等を指示することができる。
【0081】
なお、以上において、データ再生部7、データ解析部5、3D処理部18及び比較部19は、当該機能を発揮させるようにコンピュータを動作させるコンピュータプログラムによっても達成可能である。
【図面の簡単な説明】
【0082】
【図1】航空機、ヘリコプター等の飛行体を使用したレーザ計測の概要を示す説明図である。
【図2】リターンパルスを示す説明図である。
【図3】レーザ計測部及び送信部の構成を示すブロック図である。
【図4】パルスデータ生成部からのデータの出力フォーマットを示す模式図である。
【図5】GPS/IMUデータ生成部からのデータの出力フォーマットを示す模式図である。
【図6】レーザ発射時刻データの変化を示すグラフである。
【図7】圧縮処理部における発射時刻データの圧縮処理の概要を示すブロック図である。
【図8】レーザパルス発射時刻データTnの圧縮処理における二次差分値列生成処理P1を示す概略のフロー図である。
【図9】対応付け処理P3で用いるインデックステーブルTBLの構造を示す模式図である。
【図10】圧縮データ形成処理P4を説明する模式図である。
【図11】ミラー回転角データθnの圧縮例を示す模式図である。
【図12】圧縮データの二次差分収納分のデータフォーマットを示す模式図である。
【図13】ミラー回転角データθnの圧縮処理の流れを示す模式図である。
【図14】分離データ列SD(P)の具体的な例を示す模式図である。
【図15】図14の分離データ列に対応して生成される保存データの模式図である。
【図16】飛行体からの伝送情報を受領する地上基地局のブロック図である。
【図17】圧縮データの復元処理を示す説明図である。
【符号の説明】
【0083】
1 飛行体、2 レーザスキャナ、3 データブロック、4 レーザ計測部、5 データ解析部、6 送信部、7 データ再生部、11 圧縮部、11a データ分離部、11b 圧縮処理部、11c 符号化処理部。
【特許請求の範囲】
【請求項1】
飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得する観測ステップと、前記観測データを地上基地局に伝送する伝送ステップと、前記飛行体の飛行中に前記地上基地局において前記観測データを解析して地表形状を演算する演算ステップとを含むレーザ計測方法であって、
前記伝送ステップは、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮ステップを有し、
前記圧縮ステップは、
前記発射時刻データのデータ列から二次差分値列を生成する差分ステップと、
前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付けステップと、
前記対応付けステップにて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成ステップと、
を有し、
前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むこと、
を特徴とするレーザ計測方法。
【請求項2】
請求項1に記載のレーザ計測方法において、
前記代表差分値は、−1、0、及び+1であること、を特徴とするレーザ計測方法。
【請求項3】
請求項1又は請求項2に記載のレーザ計測方法において、
前記mは3であり、
前記kは2であり、
前記数値列パターンの集合は、前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である3通りの特例パターンを含むこと、
を特徴とするレーザ計測方法。
【請求項4】
請求項1から請求項3のいずれか1つに記載のレーザ計測方法において、
前記指標データは、4ビットのバイナリデータで表され、
前記形成ステップは、前記対応付けステップにて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合ステップを有すること、
を特徴とするレーザ計測方法。
【請求項5】
請求項4に記載のレーザ計測方法において、
前記kは2であり、
前記結合ステップは、前記第1指標データが対応付けられた前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である場合又は前記第2指標データが存在しない場合に、当該第1指標データに、いずれの前記指標データとも識別可能な4ビットの例外識別データを結合して1バイトの前記圧縮データを生成すること、
を特徴とするレーザ計測方法。
【請求項6】
請求項4又は請求項5に記載のレーザ計測方法において、
前記形成ステップは、前記圧縮データに格納された前記二次差分値のうち前記代表 差分値以外の特例差分値を、当該圧縮データと後続の前記圧縮データとの間に所定のフォーマットで挿入する挿入ステップを有すること、を特徴とするレーザ計測方法。
【請求項7】
飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得し、前記観測データを送信する機上装置と、
地上に設置され、前記観測データを前記飛行体の飛行中に前記機上装置から受信し解析して地表形状を演算する地上装置と、
を有し、
前記機上装置は、
前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮手段を有し、
前記圧縮手段は、
前記発射時刻データのデータ列から二次差分値列を生成する差分手段と、
前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付け手段と、
前記対応付け手段にて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成手段と、
を有し、
前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むこと、
を特徴とするレーザ計測システム。
【請求項8】
請求項7に記載のレーザ計測システムにおいて、
前記指標データは、4ビットのバイナリデータで表され、
前記形成手段は、前記対応付け手段にて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合手段を有すること、
を特徴とするレーザ計測方法。
【請求項1】
飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得する観測ステップと、前記観測データを地上基地局に伝送する伝送ステップと、前記飛行体の飛行中に前記地上基地局において前記観測データを解析して地表形状を演算する演算ステップとを含むレーザ計測方法であって、
前記伝送ステップは、前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮ステップを有し、
前記圧縮ステップは、
前記発射時刻データのデータ列から二次差分値列を生成する差分ステップと、
前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付けステップと、
前記対応付けステップにて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成ステップと、
を有し、
前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むこと、
を特徴とするレーザ計測方法。
【請求項2】
請求項1に記載のレーザ計測方法において、
前記代表差分値は、−1、0、及び+1であること、を特徴とするレーザ計測方法。
【請求項3】
請求項1又は請求項2に記載のレーザ計測方法において、
前記mは3であり、
前記kは2であり、
前記数値列パターンの集合は、前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である3通りの特例パターンを含むこと、
を特徴とするレーザ計測方法。
【請求項4】
請求項1から請求項3のいずれか1つに記載のレーザ計測方法において、
前記指標データは、4ビットのバイナリデータで表され、
前記形成ステップは、前記対応付けステップにて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合ステップを有すること、
を特徴とするレーザ計測方法。
【請求項5】
請求項4に記載のレーザ計測方法において、
前記kは2であり、
前記結合ステップは、前記第1指標データが対応付けられた前記部分列を構成する2つの前記二次差分値のうち後の当該二次差分値だけが前記代表差分値以外の任意の値である場合又は前記第2指標データが存在しない場合に、当該第1指標データに、いずれの前記指標データとも識別可能な4ビットの例外識別データを結合して1バイトの前記圧縮データを生成すること、
を特徴とするレーザ計測方法。
【請求項6】
請求項4又は請求項5に記載のレーザ計測方法において、
前記形成ステップは、前記圧縮データに格納された前記二次差分値のうち前記代表 差分値以外の特例差分値を、当該圧縮データと後続の前記圧縮データとの間に所定のフォーマットで挿入する挿入ステップを有すること、を特徴とするレーザ計測方法。
【請求項7】
飛行体に搭載され、所定周期に応じてレーザパルスを反復的に発射し地表面をスキャンするレーザスキャナを用いて、前記レーザパルスの発射時刻データを含む観測データを前記飛行体上で取得し、前記観測データを送信する機上装置と、
地上に設置され、前記観測データを前記飛行体の飛行中に前記機上装置から受信し解析して地表形状を演算する地上装置と、
を有し、
前記機上装置は、
前記観測データのうち少なくとも前記発射時刻データを前記飛行体上でデータ圧縮し、圧縮時刻データを生成する圧縮手段を有し、
前記圧縮手段は、
前記発射時刻データのデータ列から二次差分値列を生成する差分手段と、
前記二次差分値列から生成順に取り出したk個(kは2以上の整数)の二次差分値からなる部分列が、予め登録された数値列パターンのいずれかに一致する場合に、当該数値列パターンに関連付けられた指標データを当該部分列に対応付ける対応付け手段と、
前記対応付け手段にて前記部分列に対応付けられた前記指標データに基づいて、前記圧縮データを形成する形成手段と、
を有し、
前記数値列パターンの集合は、前記二次差分値列における出現確率が所定値以上であるm個(mは自然数)の代表差分値からなるmk通りの順列パターンを含むこと、
を特徴とするレーザ計測システム。
【請求項8】
請求項7に記載のレーザ計測システムにおいて、
前記指標データは、4ビットのバイナリデータで表され、
前記形成手段は、前記対応付け手段にて、連続する2つの前記部分列のうち先行部分列に対応付けられた第1指標データと後続部分列に対応付けられた第2指標データとを結合して1バイトの前記圧縮データを生成する結合手段を有すること、
を特徴とするレーザ計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2006−284270(P2006−284270A)
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願番号】特願2005−102228(P2005−102228)
【出願日】平成17年3月31日(2005.3.31)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度、総務省、「次世代GISの実用化に向けた情報通信技術の研究開発」委託研究、産業再生法第30条の適用を受ける特許出願
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願日】平成17年3月31日(2005.3.31)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度、総務省、「次世代GISの実用化に向けた情報通信技術の研究開発」委託研究、産業再生法第30条の適用を受ける特許出願
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]