
レーシングゲーム装置のプログラム、そのプログラムを格納した記録媒体、及びレーシングゲーム装置
【課題】意外性に富み、現実世界ではありえない仮想空間内独特のレースを展開させることが可能なレーシングゲーム装置を提供する。
【解決手段】レーシングゲーム装置のゲーム処理手段の構成として、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、移動体を操作する前記操作手段からの発動指示により、前記特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除するステップによって削除されたパスを短縮する手段とを備える。
【解決手段】レーシングゲーム装置のゲーム処理手段の構成として、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、移動体を操作する前記操作手段からの発動指示により、前記特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除するステップによって削除されたパスを短縮する手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、操作者が操作する移動体を含む複数の移動体を仮想空間内で競争させるレーシングゲーム装置のプログラム及びそのプログラムを格納した記録媒体、並びにレーシングゲーム装置に関する。
【背景技術】
【0002】
遊戯者が操作する仮想の自車と他車とを仮想空間内で走行させて競争させるレーシングゲーム装置は、従来から広く知られている。このようなレーシングゲーム装置においては、遊戯者の操作する自動車等の移動体とコンピュータ又は他の対戦者が操作する移動体とがコース上で抜きつ抜かれつの白熱した攻防を展開することが大きな楽しみであるが、リアリティの追求に重点を置きすぎると、仮想空間内を疾走することならではの、現実世界ではありえない意外性のある非現実な特殊動作や演出効果で遊戯者を楽しませるという側面が手薄となってしまうという課題がある。このような課題に対して、近年では、現実に存在するスポーツカーやレーシングカーのように実際の車の形状や性能を忠実に模擬したものを使用せずに、架空の乗物を移動体として用いて仮想空間内を走行させるレーシングゲームがあるが、更なる爽快感やダイナミック感、意外性が求められている。
【0003】
一方でこうしたレーシングゲームにおいて、特定のハンデがないと、初心者と熟練者が同時に楽しむことができなかった。初心者と熟練者のハンデをなくすために、順位の低いものに対して車の速度を自動的に上げるものが既に存在している。しかし、そもそも操作が出来ない初心者にとって、スピードが上がったとしても、自分の制御の範囲を超えたスピードでゲームが展開するために、かえって困難となるという弊害があった。
【0004】
初心者と熟練者を考慮したゲーム装置としては、例えば、特定ポイントを通過するごとに、先頭から順に自機のサイズが小さくなるようにしたゲーム装置が提案されている(例えば特許文献1を参照)。このようなゲーム装置においては、自機が小さくなることで操作しやすくなる半面で、サイズが小さくなることで遊戯者にとっては違和感が生じることが考えられる。他の例としては、例えば、特定キャラクタとの位置関係に基づいて、遊戯者が操作するキャラクタ(あるいはCPUが操作するキャラクタ)の移動速度が一律に変更するようにしたものが提案されている(例えば特許文献2を参照)。このゲーム装置では、自分の意識下での制御による速度変更が生じるため、違和感が生じ、また初心者にとってはかえって操縦が困難となり好ましくないと考えられる。
【0005】
【特許文献1】特開2006−081753号公報
【特許文献2】特開2003−103048号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、上述のような従来のレーシングゲーム装置が有する様々な問題に鑑みて成されたものであり、本発明の目的は、意外性に富み、現実世界ではありえない仮想空間内独特のレースを展開させることが可能で、且つ、遊戯者に違和感や不公平感を感じさせることなく、移動体が走行するコースをレース中に変化させることが可能なレーシングゲーム装置のプログラム、そのプログラムを格納した記録媒体、及びレーシングゲーム装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明は、レーシングゲーム装置のプログラム、そのプログラムを格納した記録媒体、及びレーシングゲーム装置に関するものであり、ゲームプログラムに関しては、本発明の上記目的は、遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、前記ゲーム処理ステップは、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、各移動体が第1の条件を満たしているか否かを判定するステップと、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、前記削除するステップによって削除されたパスを短縮するステップと、を含むことによって達成される。
【0008】
あるいは、本発明の上記目的は、遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、前記ゲーム処理ステップは、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、各移動体が第1の条件を満たしているか否かを判定するステップと、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、前記削除するステップによって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とするステップと、を含むことによって達成される。
【0009】
また、本発明の上記目的は、前記ゲーム処理ステップは、前記複数部品の一部を削除するステップにより部品が削除された場合に、新しいパスを出現させる事象を発生させるステップを更に含むこと、前記複数部品の一部を削除するステップは、前記移動体の周囲に設定された空間内を対象として前記削除の処理を実行すること、前記ゲーム処理ステップは、前記特殊モードが発動された際に無重力の状態を発生させるステップを更に含み、前記複数部品の一部を削除するステップは、前記無重力の発生に応じて前記削除の処理を実行すること、によってそれぞれ一層効果的に達成される。
【0010】
また、情報記憶媒体に関しては、本発明の上記目的は、上記ゲームプログラムを記憶した構成とすることによって達成される。
【0011】
また、ゲーム装置に関しては、本発明の上記目的は、遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、前記ゲーム処理手段は、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、各移動体が第1の条件を満たしているか否かを判定する手段と、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除する手段によって削除されたパスを短縮する手段と、を含むことによって達成される。
【0012】
あるいは、本発明の上記目的は、遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、前記ゲーム処理手段は、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除する手段によって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とする手段と、を含むことによって達成される。
【発明の効果】
【0013】
本発明によれば、移動体の走行経路の一部を複数部品で構成したコースを仮想空間内に設定し、特殊モードが走行経路に対して発動された場合、その走行経路の部品を削除するようにしている。そのため、移動体の走行中に走行経路の一部が消失する事象を発生させるなど、意外性に富み、仮想空間内独特のレースを展開させることが可能となる。また、走行経路の一部が削除された際に、特殊モードの発動により、各移動体のコース上の走行距離が自動的に短縮するようにコースを再設定する形態とすることにより、遊戯者に違和感や不公平感を感じさることなく、移動体が走行するコースをレース中に変化させることが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好適な実施の形態について図面を参照して説明する。
【0015】
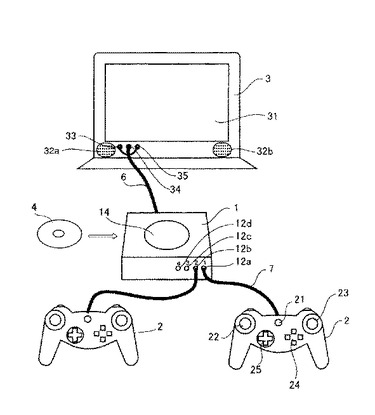
図1は、本発明が適用される家庭用ゲーム装置の一例を示す外観図あり、このゲーム装置は、一般的な家庭用ゲーム装置の例を示している。図1において、ゲーム装置の本体1(以下「ゲーム機本体」と呼ぶ)には、操作信号の入力端子(12a〜12d)と、映像信号及び音声信号の出力端子とが設けられており、操作者が操作する操作コントローラ2が接続ケーブル7を介して接続され、ゲーム画像などを表示するための表示装置3が映像/音声接続ケーブル6を介して接続される。
【0016】
コンピュータをゲーム処理手段として機能させるためのゲームソフトウェア(ゲームプログラム及び制御データ類)は、本例では外部記憶媒体4に格納されており、その外部記憶媒体4(本例ではDVD−ROM)は、ゲーム機本体1に設けられている蓋体14の部分から装填される。画像表示手段としての表示装置3は、本例ではテレビジョン受像機であり、ディスプレイ(画像表示装置)31とスピーカ32a,32bと映像/音声入力端子(映像信号入力端子33及び音声信号入力端子34,35)とを備えている。
【0017】
操作コントローラ2には、ゲームの開始を指令するスタートボタン21と、アナログジョイスティック22,23と、各種操作ボタン24と、方向キー25とが配設されており、これらの入力操作スイッチには、遊戯するゲームに応じて様々な機能が割り当てられている。本例では、4つの操作コントローラ2がゲーム機本体1に接続可能であり、最大4人の遊戯者が1つのゲームに同時に参加してゲームを楽しめるように構成されている。
【0018】
このような構成において、ゲーム装置は、操作コントローラ2から出力される入力操作情報に基づいてゲームプログラムを実行し、ゲームに係る画像データと音声データを生成して、テレビジョン受像機3のモニタ(ディスプレイ31)にゲーム画像を表示すると共にスピーカ32a,32bから効果音等を発生させる。
【0019】
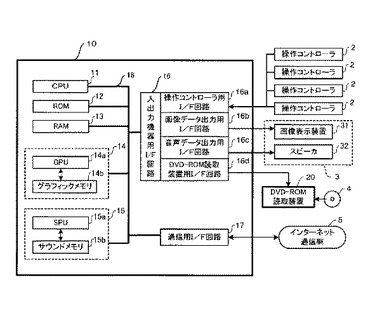
図2は図1に例示したゲーム装置のハードウェア構成の一例を示すブロック図である。ゲーム機本体1には、制御基板10と外部記憶媒体4の読取装置20(本例ではDVD−ROM読取装置)とが内蔵されている。なお、説明の便宜上、本発明に係るレーシングゲームの処理を実行する全体の情報処理手段を「ゲーム処理手段」として定義し、画像情報生成手段や音声情報生成手段については、ゲーム処理手段の一部の構成要件として説明する。
【0020】
制御基板10には、ゲームプログラムに従って動作するゲーム処理手段としてのメインCPU(Central Processing Unit)11と、主記憶手段としてのROM(Read Only Memory)12及びRAM(Random Access Memory)13と、ゲームプログラムによって生成された画像情報を基に、画像表示装置31に出力する映像信号を生成する画像処理回路14と、スピーカ32に出力する音声信号を生成する音声処理回路15と、入出力制御手段としての入出力機器用I/F(interface)回路16と、通信制御手段としての通信用I/F回路17とが搭載され、これらはバス18を介して接続されている。
【0021】
ROM12にはゲーム装置の起動用プログラム等の基本ソフトウェアが格納されており、RAM13には、ゲームの進行に従って得られる移動体の移動情報や仮想空間の地形情報などが一時的に記憶される。
【0022】
画像処理回路14は、CPU11からの指示に応じて動作するGPU(Graphics Processing Unit)14aとグラフィックメモリ14b等から構成され、画像情報生成手段としてCPU11を機能させるゲームプログラムに従って生成された画像情報(3次元仮想空間にモデル化されたポリゴンオブジェクト,仮想光源,仮想カメラなどの情報)に基づいて、3次元座標から2次元座標への座標変換処理やレンダリング処理(シェーディング,テクスチャーマッピング,レートレーシング法,ラジオシティ法などによる画像処理)を行い、ゲーム画像を画像表示装置31に表示させる処理を行う。なお、GPU14aやレンダリングプロセッサなどの3次元グラフィックス処理用の補助プロセッサを備えていないゲーム装置の場合は、ゲームプログラムによって上記のような座標変換処理やレンダリング処理などを実行する形態となる。
【0023】
音声処理回路15は、SPU(Sound Processing Unit)15aとサウンドメモリ15b等から構成され、音声情報生成手段としてCPU11を機能させるゲームプログラムに従って生成された音声情報に基づいて、効果音等の音声データを生成して音声信号を出力する処理を行う。
【0024】
入出力機器用I/F回路16は、本例では、操作コントローラ用のI/F回路16a、画像データ出力用のI/F回路16b、音声データ出力用のI/F回路16c、及びDVD−ROM読取装置用のI/F回路16dを備えている。通信用のI/F回路17は、インターネット通信網等の通信ネットワーク5を介したオンラインゲームを行う場合などに使用される通信制御手段である。
【0025】
なお、操作者が移動体を操作する移動体操作手段としての操作コントローラ2は、図1に例示した操作コントローラ2の構成に限るものではなく、ワイヤレスの操作コントローラや、コントローラ本体の動きを検知するセンサ(コントローラの画面に対する位置や方向、コントローラの傾きやX,Y,Z軸方向の加速度を検知するセンサなど)を備えたものや、タッチパネルやデジタイザ等のポインティングデバイスにて構成されたものなど、遊戯者が入力操作した情報をゲーム装置側に伝達できるものであれば良い。また、ゲームソフト(ゲームプログラム及びデータ)を格納する外部記憶媒体4は、DVD−ROMに限るものでなく、コンピュータにより読取可能な任意の情報記憶媒体を用いることができる。また、ゲーム機本体1内のRAM13若しくは他の内部記憶媒体にネットワークを介してゲームソフトをダウンロードする形態とした場合は、外部記憶媒体4及びその読取装置20は不要である。
【0026】
次に、本実施形態に係るコンピュータゲームの概要について説明する。
【0027】
本発明は、遊戯者の操作に応答して移動する移動体を含む複数の移動体を仮想三次元空間内で競争させるコンピュータゲーム(「レーシングゲーム」と呼ぶ)に好適に適用されるものであり、以下、レーシングゲームに適用した場合を例として説明する。
【0028】
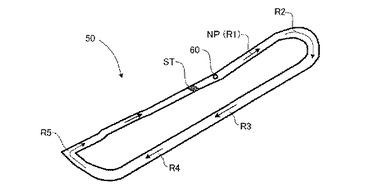
図3は、仮想空間内に設定されるコース(走行路)50の基本構成の一例を示している本実施形態に係るレーシングゲームは、操作者(以下「遊戯者」と呼ぶ)が操作する移動体を含む複数の移動体60が、仮想空間内に設定された3次元形状のコース50を走行して競争するゲームである。図3のコース50の例では、遊戯者又はCPUによって操作される各移動体60が、スタート地点STからスタートして環状のコース50を規定回数周回し、ゴール地点(地点ST又は他の地点)に達した順位で勝敗を決定する。図3中の矢印R1〜R5に沿った走行経路NPは、通常走行時に使用する第1のパス(以下「通常パス」と呼ぶ)であり、この他に、後述する特殊モードの発動時にのみ使用することができる特殊な走行経路として第2のパス(以下「特殊パス」と呼ぶ)が設定されている。
【0029】
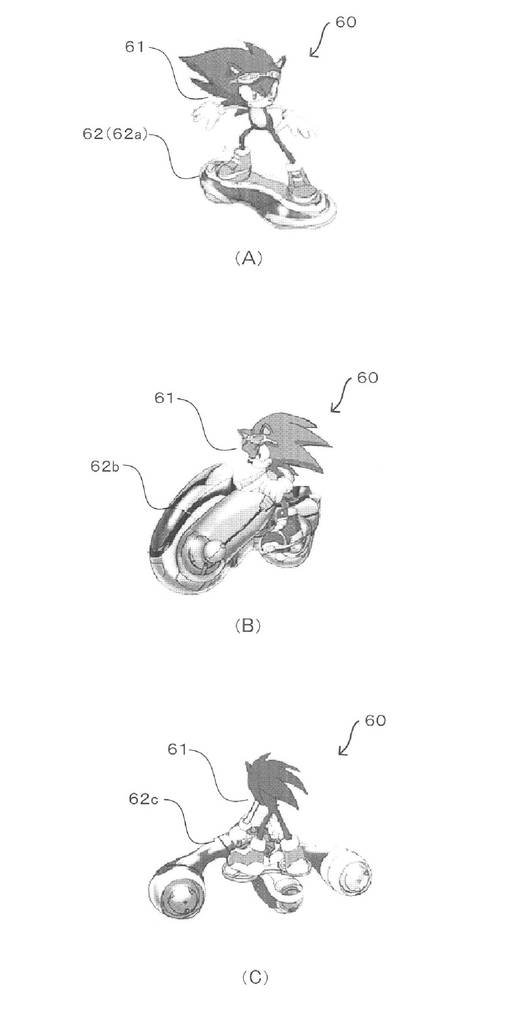
コース50を走行する移動体60は、本例では、図4(A)〜(C)に示すようなキャラクタ(仮想の遊戯者)61が乗った仮想乗物62である。図4(A)に示される仮想乗物62aは、エア(空気)の力を利用して地上との間に空気の層を形成し、その上をスノーボードやサーフィンボードのように滑走する形態の「エアライド」と称する架空の乗物である。図4(B)に示される仮想乗物62bは、地面に接地して走行するバイク型の乗物であり、図4(C)に示される仮想乗物62cは、地上との間に仮想の海の層を形成し、その上を高速艇のように滑走する形態の「ホイールヨット」と称する架空の乗物62aである。
【0030】
遊戯者は、このような移動体60の動作を操作コントローラによって操作する。例えば、図1に例示した操作コントローラ2を用いた場合は、操作ボタン24の押圧操作によって仮想乗物62の加速や減速を操作する。また、キャラクタ61の姿勢を左右に傾けて移動体60の重心を移動させたい場合や、仮想乗物62を上下左右に移動させたい場合は、アナログジョイスティック22又は23の傾動操作によって方向を操作する。また、後述する特殊モードの発動時に物理的な重力(G)の方向を変更したい場合も、アナログジョイスティック22又は23の傾動操作によって重力の方向を指定して変更する。
【0031】
これらの仮想乗物62は、加速性能,減速性能,コーナリング性能,最高速,ジャンプ力,回頭性,燃費など、それぞれ異なる走行性能が割り当てられており、仮想乗物62の走行性能を変化させるパーツも用意されている。遊戯者は、このような各種の仮想乗物62の中から、コースロケーションに応じて自分好みの仮想乗物62を選択してレースに参加する。また、仮想乗物62の乗るキャラクタ61についても複数の種類が設定されており、自分好みのキャラクタ61を選択可能としている。なお、初期の乗物62は、例えば図4(A)の乗物62a(エアライド)というように予め設定されている。その後は、レース中に貯めたポイントを用いて好みの乗物を購入することが可能である。なお、パーツの部分を購入して自分の乗物をカスタマイズできる形態としても良い。
【0032】
ここで、キャラクタ61のタイプについて説明する。
【0033】
キャラクタ61のタイプには、スピードタイプ、フライタイプ、パワータイプ等の複数のタイプが設定されており、レース中にそれぞれのタイプのキャラクタが所有する特徴的な能力(キャラクタ特有の性格や技術)を発揮することにより、その能力に応じた特定のアクションを起こすことが可能に設定されている。
【0034】
スピードタイプのキャラクタは、レール状の細長い走行経路で形成されたパス(レールウェイと呼ぶ)に、仮想乗物62をアクセスさせる能力を身に着けたキャラクタである。フライタイプのキャラクタは、コース上に設置された専用のギミック上を通過することにより、仮想乗物を飛行させる能力を身に着けたキャラクタである。このフライタイプのキャラクタは、例えば、コース上に設置されたジャンプ台の上を通過することで空中を滑空させることが可能である。パワータイプのキャラクタは、走行経路上に設置された障害物(移動体60のの進行を邪魔するもの)を破壊する能力を身に着けたキャラクタであり、その能力を発揮して前方の障害物などを破壊することにより、障害物を回避せずに仮想乗物を走行させることが可能である。
【0035】
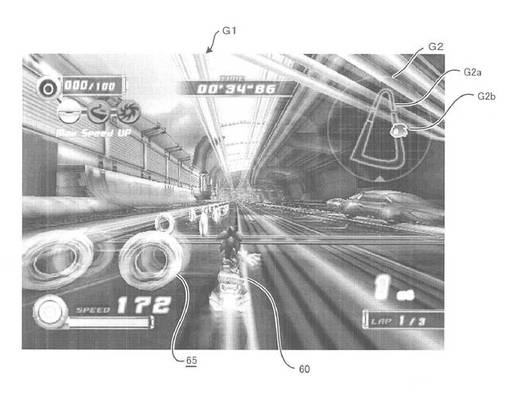
図5は、移動体60が通常パスNPを走行中のゲーム画像の一例を示しており、同図に示すように、ゲーム画像としては、例えば移動体60を仮想カメラによって捉えた画像が画面G1上に表示されると共に、画面G1上の所定位置にコースマップG2が合成して表示される。コースマップG2としては、例えばコース全域の縮図G2aと現在の走行位置を示すシンボル画像G2bとが表示される。また、画面G1上には、走行状況を示す情報として、現在のラップタイム、走行速度、周回数等の情報が表示される。図5中のリング状のアイテム65は、移動体60がリング部を通過して獲得することでポイントが貯まるアイテムである。本例でのポイントは仮想のお金であり、乗物やパーツを購入するために使用される。
【0036】
次に、本発明に係る特殊モードにおけるゲームの処理形態について説明する。
【0037】
本実施形態に係るレーシングゲームは、一般に設けられた道路を走行するのではなく、仮想空間内を疾走するレーシングゲームであるため、仮想空間内独特のレースを展開させるようにしている。本発明の好ましい実施形態においては、重力の操作が可能な特殊モードを設け、仮想空間ならではの特殊な操作(重力操作)によって様々な事象を発生させるようにしている。
【0038】
第1の処理形態においては、例えば、特殊モードの発動時に周囲の重力エネルギーを吸収して無重力状態を発生させ、その無重力の影響によってコースの一部が破壊する事象(コースの一部が飛び散って消失する事象)を発生させるようにしている。さらに、上記事象によって走行部分が消失した時には、レースを中断することなく、走行方向のコース長を短縮したコースを自動的に再設定するようにしている。また、上記事象によって新しいパス(通常パス又は特殊パス)を出現させる事象を発生させるようにしている。
【0039】
第2の処理形態においては、現実世界では重力の作用によって物理的に不可能な天井や壁などの走行経路を特殊パスとして設け、特殊モードの発動時には重力の操作によって当該特殊パスの走行を可能としている。
【0040】
その他、各種の事象を発生させるための複数種類のスイッチオブジェクトをコース内に設定しておき、第1の処理形態においては無重力(−G)の作用によって、第2の処理形態においては重力(+G)の作用によって当該スイッチを作動し、そのスイッチの属性に対応するアクションを起動するなど、様々な事象を発生させるようにしている。
【0041】
上記第1及び第2の処理形態は、独立した処理形態としても良いが、両者の処理形態を組み合わせた処理形態とすることも可能である。なお、説明の便宜上、上記第1の処理形態におけるゲーム処理ステップを「コース短縮制御ステップ」と称し、上記第2の処理形態におけるゲーム処理ステップを「特殊パス制御ステップ」と称して説明する。
【0042】
先ず、本発明に係る重力(G)の制御について説明する。
【0043】
移動体60に作用する重力は、現実世界では万有引力と天体(地球)の自転による遠心力との合力であり、3次元座標系のXZ面(水平面)に対して略垂直方向に作用するが、本発明に係るコンピュータゲーム上の仮想世界においては、操作コントローラ2の操作によって重力が作用する方向を変更できるようにしている。言い換えると、現実世界における物理的な重力を無重力化する代わりに、遊戯者が制御可能な架空の重力(「仮想重力」と呼ぶ)を発生させるようにしている。なお、本発明で言う「物理的な重力」とは、3次元の仮想空間内において現実世界と同様の方向に働く重力のことを意味する。一方、本発明で言う「仮想重力」とは、遊戯者が操作可能な重力のことを指し、詳しくは、特殊モードにおいて操作コントローラ2の操作によって指定された方向に物理的な重力の方向を変えた際に、変えた方向に作用する重力のことであり、遊戯者が操作可能な重力のことを意味する。以下、説明の便宜上、両者の意味が混同しそうな場合を除いて「仮想重力」も「重力」という用語を用いて説明する。
【0044】
以下、重力の操作が可能なモードを「特殊モード」と定義し、特殊モードでの重力の操作(物理的な重力の方向変更操作,仮想重力エネルギーのチャージ操作,仮想重力エネルギーの開放操作など)を「重力コントロール」と定義して説明する。
【0045】
重力コントロールとは、移動体60の周囲の物理的な重力を吸収する形で仮想重力をチャージすることにより無重力状態を発生させ、チャージした重力(仮想重力のエネルギー)を指定した方向に開放することにより、その方向に移動体60や周囲のオブジェクトを落下(重力という名前の速度を与える)させるアクションのことを言う。遊戯者の操作としては、例えば、特定の操作ボタン24の押圧操作によって特殊モードの発動(重力コントロールの発動)を指示し、アナログジョイスティック23の傾動操作(又は方向キー25の操作)によって重力の方向を指示する。チャージした重力の開放指示は、特定の操作ボタン24の押圧操作によって行う。その重力の開放によって重力が当該方向に射出される。重力によって移動体60に与える速度は、本実施の形態では無重力状態の継続時間(つまり重力のチャージ量)によって異なり、重力のチャージ量が多いほど移動体60の速度が速くなるように、重力のチャージ量に応じて重力エネルギーを速度に変換し、移動体60に当該速度を付加する形態としている。
【0046】
本発明に係るレーシングゲームにおいては、上述のような重力の操作によって、コース短縮制御ステップにおいては、レース中にコースが短縮するようにコース形状を変形させたり、新しいパスを出現させたりするようにしている。また、特殊パス制御ステップにおいては、現実世界では重力の作用によって物理的に不可能な走行面を有するトンネル天井部などの特殊パスでの移動体60の走行を可能としている。
【0047】
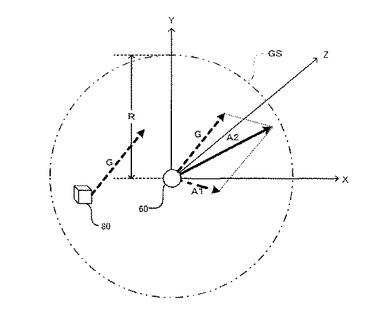
次に、特殊モード時に発生する重力の作用範囲について、図6を参照して説明する。
【0048】
ゲームプログラムに従って動作するCPU11(以下「ゲーム処理手段11」と呼ぶ)は、特殊モードが発動されると、移動体60を中心とした周囲の3次元空間を重力Gが作用する範囲として設定する。例えば、図6において、移動体60が1.5m程度とすると、その位置を中心とした半径R=最大で20m程度の球状空間の内部を特殊重力空間GS(重力Gの作用範囲)として設定する。
【0049】
ゲーム処理手段11では、特殊モードが発動されてから重力の開放指示がされるまでの間、時間の経過に応じて、特殊重力空間GS内の重力を無重力化すると共に、重力エネルギーの量を加算し、その加算値を重力のチャージ量としてRAM3に記憶する。そして、操作コントローラからの重力の開放指令を入力した時点で、操作コントローラの操作によって指定された方向に重力Gを作用させる。ゲーム処理手段11は、重力Gをその特殊重力空間GS内に存在する他のオブジェクト80(重力の影響有りの属性を有するオブジェクト)に対しても同様に作用させ、重力Gの方向と大きさを示す重力情報に基づいて、オブジェクト80の動きを制御するようにしても良い。例えば、オブジェクト80が、コース50に設定されている特殊パスの経路を使用可能にするためのオブジェクト(隠し経路の扉など)であれば、そのオブジェクトの属性情報に応じて、オブジェクト80を重力Gの方向に飛ばしたり、破壊して消失させたり、隠し経路の扉(通常時の重力方向では回動しないが所定方向の力で回動する扉)を開口させたりするようにしても良い。
【0050】
移動体60のオブジェクトに対しては、重力という名前の速度に換算し、その速度(又はその速度とその時点の走行速度との加算値)で移動体60を走行させることによって瞬間的に加速させる。あるいは、図6中に示すように、特殊モード発動時の走行速度ベクトルA1と重力速度ベクトルGとを合成し、合成後の速度ベクトルA2の情報に基づいて、移動体60の移動方向と速度を決定するようにしても良い。
【0051】
また、周囲のエネルギーを吸収して無重力化させている過程では、特殊重力空間GS内に存在する他のオブジェクト80が浮遊したり、上記重力の影響とは逆に、無重力の影響によってオブジェクト80を破壊して消失させたり、隠し経路の扉を開口させたり、壁を消失させて新しいルートの通常パス若しくは特殊パスを出現させたりするなど、無重力の影響によって様々な事象を発生させる形態とするのが好ましい。
【0052】
本実施の形態においては、重力エネルギーの解放時には前述のような他のオブジェクト80の動きを制御せずに、無重力状態を発生時にその影響を他のオブジェクト80に与えることによって、上記のような様々な事象を発生させる形態としている。
【0053】
なお、本実施の形態においては、特殊重力空間の範囲は予め設定された範囲としているが、仮想乗物62の種類(及びカスタマイズ用のパーツの種類)や、仮想乗物62に乗るキャラクタ61の種類に応じて、ゲーム処理手段11が可変する形態としても良い。
【0054】
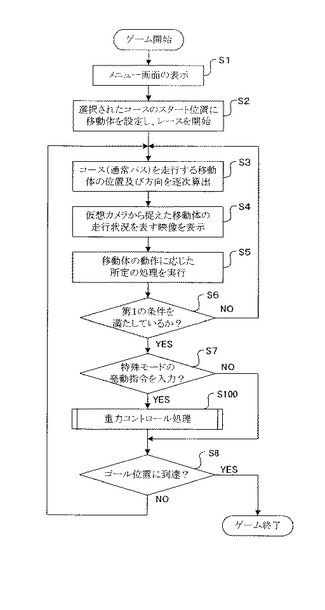
次に、本発明に係るゲーム装置の動作例を説明する。先ず、本発明に係るレーシングゲームの全体の流れを図7のフローチャートを用いて説明する。
【0055】
遊戯者のスタートボタン21の押圧操作によりゲームが開始されると、ゲーム処理手段11は、選択可能なコースや移動体60(キャラクタ61及び仮想乗物62)を示すメニュー画面をディスプレイ31に表示し、メニュー画面上でのクリック操作等によってコースや移動体60を遊戯者に選択させる(ステップS1)。
【0056】
続いて、ゲーム処理手段11は、遊戯者によって選択されたコースのスタート位置に、当該レースに参加する移動体60を含む各移動体オブジェクトを設定し、各移動体を仮想カメラから捉えた画像の画像情報を生成してディスプレイ31に表示すると共に、例えばカウントダウン表示が0になったタイミングでレースを開始する(ステップS2)。レースが開始されると、ゲーム処理手段11は、コース50の通常パスNPを走行する各移動体(各遊戯者又はCPU11が操作する移動体)の3次元仮想空間内の現在位置及び方向を逐次算出し、移動体の現在位置等の記憶情報を更新する(ステップS3)。そして、仮想カメラから捉えた移動体60のオブジェクトと地形や構造物などの背景オブジェクトとを合成処理した現在の走行状況を表す画像情報を逐次生成してグラフィックメモリ14bに格納し、図5に例示したようなゲーム画像を、画像処理回路14を介してディスプレイ31に表示させる(ステップS4)。
【0057】
続いて、ゲーム処理手段11は、移動体60の通過による特定アイテム獲得時のポイント加算処理など、移動体60の動作に応じた所定の処理を実行すると共に(ステップS5)、各移動体60が、特殊モードを発動するための条件(「第1の条件」とする)を満たしているか否かを判定する。ここで言う「第1の条件」とは、例えば、移動体60を走行させるためのエネルギーがあること、遊戯者が操作する移動体60がゴール地点に到達していないこと、移動体60がスピンしている状態でないこと、特定の演出画像を表示するために発動を制限していないこと、移動体60がコースを逆走していないこと、発動のためのアイテムを所有していること等のいずれか1つ以上である。言い換えると、本実施の形態においては、特殊モードの発動は、移動体60を走行させるためのエネルギーさえあれば、基本的にはゲーム中のどのタイミングでも行えるようにしている。なお、発動条件(and条件)として、ステップS5で更新したポイント値と予め定められた設定値とを比較し、ポイント値が設定値を超えていることを付加する形態としても良い(ステップS6)。
【0058】
続いて、ゲーム処理手段11は、上記第1の条件を満たしている移動体60を操作する遊戯者による特殊モードの発動開始指示(操作コントローラ2からの特殊モード発動指令の入力)の有無を監視し(ステップS7)、特殊モードの発動指令が入力されたと判定した場合は、操作コントローラ2からの重力の操作情報の入力を受付け、重力コントロールの処理を実行する(ステップS100)。なお、この重力コントロールの処理については、具体的な例を示して後述する。
【0059】
上記ステップS100における重力コントロールの処理が終了すると、ゲーム処理手段11は、全ての移動体がゴール位置に到達したか否かを判定し(ステップS8)、到達していないと判定した場合は、ステップS3に移行して処理を繰り返し、ステップS8において全ての移動体がゴール位置に到達したと判定した場合は、ゲームの終了処理を行って当該コースでのレーシングゲームを終了する。
【0060】
次に、上記ステップS100における重力コントロールの処理について具体例を示して説明する。
【0061】
先ず、コース短縮制御ステップにおける処理について説明する。なお、ここでは、上記ステップS100の処理を含めて、コース短縮制御に係る全体の処理について説明する。
【0062】
ゲーム処理手段11によって実行されるコース短縮制御ステップにおいては、前述のように、特殊モードにおいて発生させた無重力の影響によってコースの一部(例えば路面や壁の一部など)を破壊して消失させる事象を発生させるようにしている。そして、その事象に応じて、例えば、コース上の移動体の走行距離が短縮する形でコース長が縮小する事象や、新しいルートが出現する事象を発生させるようにしている。
【0063】
以下、コース短縮制御ステップにおける処理の詳細を図8のフローチャートの流れに沿って説明する。
【0064】
コース短縮制御ステップでは、先ず、仮想空間内の移動体の走行経路となるパスの一部を複数部品で構成し、そのパスを含むコースを仮想空間内に設定する。なお、ここで言う「コース」とは、走向路のことを意味し、「パス」とは、コース内の走行経路(例えばコースが分離帯で仕切られた各々の走向路)のことを意味しており、コースの短縮処理においては「コース」と「パス」は同義語である。
【0065】
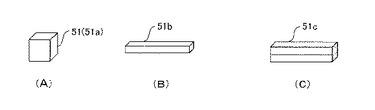
コースを形成するための部品としては、例えば、図9(A)〜(C)に示すように、立方体状の部品51a(以下「単体ブロック」と呼ぶ)、直方体状の鉄骨用パーツ51b(以下「単体鉄骨」と呼ぶ)、直方体状のガードレール用パーツ51c(以下「単体ガードレール」と呼ぶ)がある。コースの構成要素として使用されるこれらの部品51は、本例では3次元ポリゴンモデルから成るオブジェクトで作成される。そして、同一種類又は異なる種類の部品51を組み合わせることによってコースが形成され、図3に例示したようなコース50が仮想空間内に設定する。
【0066】
なお、コース短縮制御ステップの対象となるコースの部品オブジェクト(後述の重力の影響に係る属性を有するオブジェクト)は、本実施の形態では、ブロック形状の部品51を例として説明するが、ブロック形状に限るものではない。例えば、ビーム状のパスとする場合、ビーム状のオブジェクトを連結することにより(又は1つのビーム状のオブジェクトにより)パスが形成される。その場合、オブジェクトに接触等の条件を満たすことでビーム状のルートがなくなるため、ごく自然にコース長が縮小する事象を発生させることができる。
【0067】
ここで、部品51の組み合わせによって形成されるコースについて、具体例を示して説明する。
【0068】
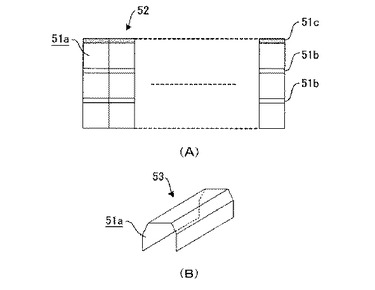
図10(A)及び(B)は、部品51の組み合わせによって形成したコースの一部を示しており、図10(A)は、コースの一部を構成する直線状走行路52の一例を示す平面図、図10(B)は、同図(A)の直線状走行路52に設置されるトンネル上の屋根53を示す斜視図である。図10(A)に示される直線状走行路52は、単体ブロック51aと単体鉄骨51bとの組み合わせによって直線状の路面を形成し、単体ガードレール51cの組み合わせによって形成したガードレールを路面の片側に設けた構成としている。他方、図10(B)に示される屋根53は、単体ブロック51aを組み合わせてドーム型に形成した屋根(以下「ドーム型屋根」と呼ぶ)である。
【0069】
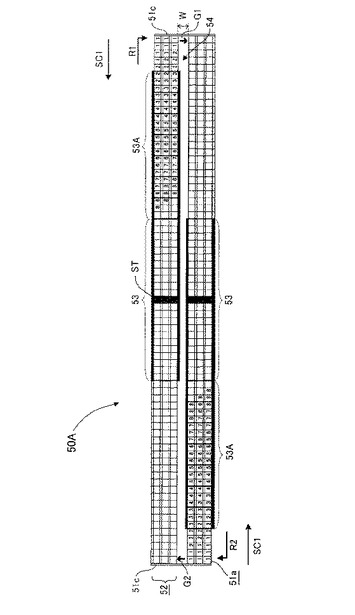
図11は、仮想空間内に設定されるコースの一例を示す平面図であり、上記直線状走行路52とドーム型屋根53とを用いて形成したコースを示している。図11に示されるコース50Aは、所定の間隔Wを空けて2本の直線状走行路52(例えば長さ750m、幅36mを想定した直線状走行路)を平行に配置し、その両端にガードレール用パーツ51cを配置した構成としている。また、それぞれの直線状走行路52にはドーム型屋根53、53Aが配設されている。このコース50Aは、各移動体を周回させて競争させる形態のレーシングゲームに使用されるコースであり、以降、コース50Aの例を用いて説明する。
【0070】
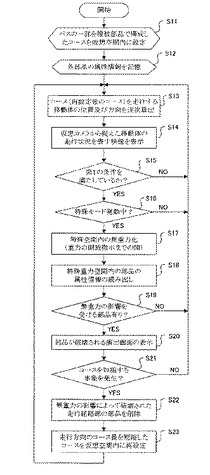
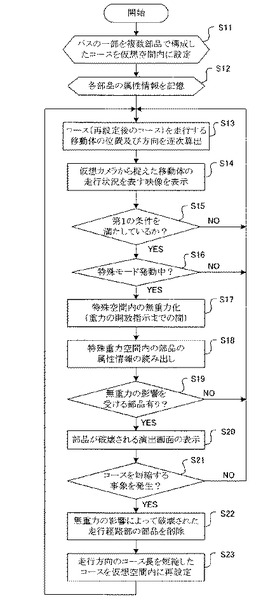
コース短縮制御ステップでは、上述のようにして形成したコース50Aを仮想空間内に設定する(ステップS11)。そして、コース50Aを構成する各部品オブジェクトの属性情報を設定して記憶媒体に格納しておき、ゲームの開始時に読み出してRAM13に記憶する。ここで、コース短縮制御ステップにおいて使用する主要な属性情報について説明する。本実施の形態においては、無重力の影響によってコースの一部を破壊して消失させる事象を発生させるために、コースを構成する部品オブジェクトの属性情報として例えば次のような情報が設定される。
【0071】
図11中の「1」から「8」で示す属性情報は、その数値をNとして、N週目以降に無重力の影響を受けるブロックであり、影響を受けた場合は飛び散り、そのブロックの路面部分が消失するブロックであることを意味している。その他のブロックは、重力の影響を受けるブロックであることを意味している。なお、ドーム型屋根53Aは、空間部54側の壁が単体ガードレールを組み合わせた壁オブジェクトで構成されている。例えばその壁オブジェクトの属性情報を「無重力の影響有り」、「特殊パスを出現させる」と設定しておくことで、無重力の影響により壁(ガードレールの壁や路肩などの特定の壁)が破壊されて消失し、新しいルート(例えば2本の直線状走行路52の間を通る特殊パスを出現させる形態としても良いし、予め設定されている特殊パスが表示される形態としても良い。コース短縮制御ステップでは、上記のような属性情報を設定して記憶媒体に格納しておく(ステップS12)。
【0072】
次に、コースの短縮制御に係るゲーム中の処理について説明する。
【0073】
その説明に先立ち、コース50Aを走行する移動体の動作について説明する。このコース50Aにおいては、移動体は、図11中のスタート地点STからスタートして、図面において上の直線状走行路52を右側に向かって走行し、その直線状走行路52の右端部(矢印R1の部分)に来たら、重力コントロール(図中の矢印G1の方向への重力重操作:詳しくは、後述の特殊パス制御ステップの処理で説明する操作)を用いて、図面において下の直線状走行路52に移動する。その後、移動体は下の直線状走行路52を左側に向かって走行し、その直線状走行路52の左端部(矢印R2の部分)に来たら、重力コントロール(矢印G2の方向への重力操作)を用いて、図面において上の直線状走行路52に戻り、同様の走行を繰り返す。その際、スタート地点STに到達する都度、ゲーム処理手段11によって周回が判定される。
【0074】
本実施の形態においては、上記の重力コントロールを行った際に、数値の書かれている単体ブロック51aが無重力の影響を受けて飛び散り、周回を重ねる毎にコース自体が短くなっていくように、ゲーム処理手段11(コース短縮制御ステップを実行するCPU11)が自動的にコース50を短縮させるようにしている。以下、コースの短縮制御に係るゲーム中の処理について説明する。
【0075】
ゲーム処理手段11は、コース50の通常パスNPを走行する各移動体(各遊戯者又はCPU11が操作する移動体)の3次元仮想空間内の現在位置及び方向を逐次算出し、移動体の現在位置等の記憶情報を更新する(ステップS13)。
【0076】
そして、仮想カメラから捉えた移動体60のオブジェクトと地形や構造物などの背景オブジェクトとを合成処理した現在の走行状況を表す画像情報を逐次生成してグラフィックメモリ14bに格納し、図5に例示したようなゲーム画像を、画像処理回路14を介してディスプレイ31に表示させる(ステップS14)。
【0077】
続いて、ゲーム処理手段11は、移動体60の通過による特定アイテム獲得時のポイント加算処理など、移動体60の動作に応じた所定の処理を実行すると共に、各移動体60が、特殊モードを発動するための条件(第1の条件)を満たしているか否かを判定する。ここで言う「第1の条件」は、前記ステップS5で説明した第1の条件であり、説明を省略する(ステップS15)。続いて、ゲーム処理手段11は、第1の条件を満たしている移動体60を操作する遊戯者による特殊モードの発動開始指示(操作コントローラ2からの特殊モード発動指令の入力)の有無を監視し、特殊モードの発動指令が入力されたと判定した場合は、特殊モードを発動中か否かを判定する(ステップS16)。
【0078】
そして、特殊モードを発動中でないと判定した場合は、ステップS13に戻って処理を繰り返し、特殊モードを発動中と判定したのであれば、重力の開放指示を示す情報が入力されるまでの間、以降のステップS17からステップS23の処理を実行する。
【0079】
特殊モードが発動されてから重力の開放指示がされるまでの間は、ゲーム処理手段11は、図6に示した特殊重力空間GS内(本例では移動体60を中心とした周囲の仮想空間内)の重力エネルギーが吸収される形で、時間の経過に応じて特殊重力空間GS内の重力を無重力化すると共に、重力エネルギーの量を加算し、その加算値を重力のチャージ量としてRAM3に記憶する(ステップS17)。
【0080】
ゲーム処理手段11は、上記ステップS17の処理によって無重力の状態を発生させると共に、特殊重力空間GS内に存在する部品オブジェクト(各部品51のオブジェクト)を対象として、その部品オブジェクトの属性情報を記憶手段(RAM13)から読み出し(ステップS18)。各部品51の属性情報に基づいて、「無重力の影響有り」の属性が設定されている部品51が存在するか否かを判定する(ステップS19)。
【0081】
上記ステップS19において、「無重力の影響有り」の属性が設定されている部品51が特殊重力空間GS内に存在すると判定した場合は、ゲーム処理手段11は、当該部品51が砕けて飛び散る様子を示す演出画像の画像情報を生成し、その演出画像をディスプレイ31に表示する(ステップS20)。
【0082】
なお、コース50Aの例では、図11中の「1」から「8」の部品51が走行路の路面であり、上記ステップS20において、「無重力の影響有り」の属性であれば、その部品51が必ず破壊される訳ではない。本例では、周回数Nの属性情報に基づき、周回数に応じて破壊される形態としている。また、上記ステップS20において、単体ガードレール51cの属性情報として「無重力の影響有り」の属性が設定されている場合は、その単体ガードレール51cの部分が破壊される様子を示す演出画像が表示される。なお、部品51が破壊される条件は、特殊重力空間GS内に存在する部品51の属性が「無重力の影響有り」であることの他に、上記のように周回数の条件(ゲームの進行状況に応じた条件)を追加するなど、1つ以上の条件を追加するようにして良い。
【0083】
ゲーム処理手段11は、ステップS20の処理を実行すると共に、コースを短縮する事象を発生させるか否かを判定する(ステップS21)。
【0084】
なお、コースを短縮する事象を発生させる形態としては、例えば、特殊モードが発動されて無重力の影響を受けた走行経路部において、その走行経路部の部品51の破壊(路面の消失)が一つの部品51だけの場合でも発生させる形態、コースの幅方向全域に亘って部品51が破壊された場合(コースが切断されるような事態が生じた場合)に発生させる形態、所定数の部品51が破壊された場合に発生させる形態がある。これらの中のいずれの形態としても良く、また、レースの状況に応じて形態を可変するようにしても良い。
【0085】
上記ステップS21において、コースを短縮する事象を発生させると判定した場合は、ゲーム処理手段11は、無重力の影響によって破壊された走行経路部の部品51を削除し、レースを中断することなく、走行方向のコース長を短縮したコースを自動的に再設定する。言い換えると、コース上の移動体の走行距離が短縮する形でコース長を縮小したコースを形成し、走行経路部が破壊される直前のコースを、縮小したコースに自動的に切換える処理を実行する。
【0086】
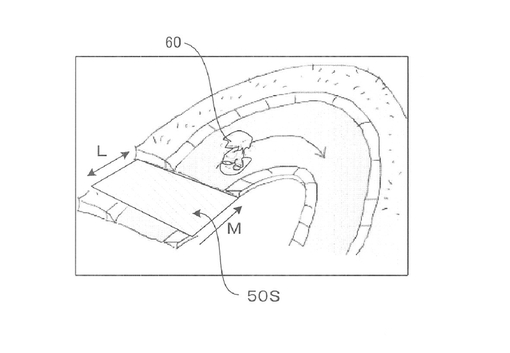
その際、本実施の形態では、例えば図12に示すように、特殊モードを発動させた移動体60の後方側走行経路部50Sの部品オブジェクトを削除し、図12中のサイズL分、コースを短縮させるようにしている。この図12の例では、移動体60の後方の部分(消失してない)を図中の矢印Mの方向にシフトし、コースの切断部を連結させる形態でコースが形成される形となる。その際、傾斜した走行経路部において短縮させる場合は、傾斜角度を変化させるようにしても良い。また、カーブの走行経路部において短縮させる場合は、曲率を変化させるようにしても良い。また、上昇又は加工する走行経路部において短縮させる場合は、走向方向の路面の角度や曲率を変化させるようにしても良い。なお、短縮させたコースに切換え過程において、走行経路部が破壊された部分に位置する移動体は、その破壊の影響を受けるはなく、通常に走向させるようにしている(ステップS22)。
【0087】
続いて、ゲーム処理手段11は、短縮したコースを仮想空間内に再設定し、ステップS13に戻り、レースを継続させる(ステップS23)。
【0088】
本実施の形態においては、上述のように、仮想空間ならではの特殊操作(重力操作)によって、現実世界ではありえないコースの縮小を発生させるようにしている。そのため、意外性に富み、仮想空間内独特のレースを展開させることができる。また、各移動体のコース上の走行距離が一律に短縮する形態となるので、遊戯者に違和感や不公平感を感じさせることない。
【0089】
次に、特殊パス制御ステップにおける処理について説明する。
【0090】
先ず、特殊モードにおいて使用可能となる特殊パスについて説明する。
【0091】
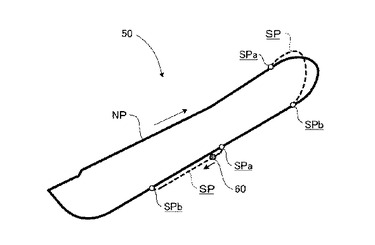
図13は、特殊パスが設定されたコース50の例を示しており、本例では、通常パスNPから分岐する2つの特殊パスSPが設定されている。特殊パスSPとしては、構造物(ガードレールや建物など)の壁や天井などがあるが、特殊パスSPの種類については具体例を示して後述する。このようなコース50において、遊戯者は、例えば、特殊パスSPへの分岐点SPaに移動体が到達する直前で特殊モードを発動し、周囲の重力をチャージして無重力化すると共に、重力の方向を特殊パスSPの方向に変化させることによって、移動体60を特殊パスSP側に移動させる。その際、移動体60の走行経路が分岐点SPaを起点として特殊パスSP側に変更され、特殊パスSPのルートを移動体60が走行することになる。そして、合流点SPbで通常パスNPに合流し、移動体60は元の通常パスNPを走行することになる。
【0092】
壁や天井等の地形(特殊パスSPの走行路)から、グローバル軸上の地上(通常パスNPへの合流点SPb)に戻す場合の処理形態としては、例えば次のような形態がある。
(T1)地上から移動体60を離す仕掛け(ジャンプ台等)を用意し、強制的にその地形から落下させることで地上に戻す処理形態。
(T2)地形の角度を徐々に変化させ、地続きでグローバル軸上の高さ方向を示すY軸の−方向に戻す処理形態。
(T3)壁や天井に移る際と同様に、Gコントロールを用いて、遊戯者の重力操作に応じて地上に戻す処理形態。
【0093】
上記(T1)及び(T2)の処理形態では、特殊モードの解除は、特殊パスNPの終端に設定された合流点SPbで自動的に行われるが、例えば(T3)の処理形態で遊戯者の操作で特殊モードの発動を解除(終了)した場合、あるいは、合流点SPbの手前で例えば重力のチャージ量を全て消費した場合は、特殊パスの途上で特殊モードが解除され、元の重力方向に重力が戻ることになる。その場合、特殊モードの発動を終了した時点で合流点が設定され、特殊パスを走行中の移動体はその合流点で通常パスに合流することになる。
【0094】
なお、本実施の形態においては、特殊モードは、重力の操作指示がされたことのみを条件として発動できる形態としているが、特定アイテムの獲得によって得られるポイント、走行時間、周回数、走行順位、移動体間の距離などを要素として、特定の条件を満たしたときに発動可能とする形態としても良い。また、特殊パスSPは、重力の操作方向が正しければ常に利用できるパスの他に、特定のスイッチオブジェクトを作動しないと利用できないパスを設定するようにしても良い。例えば、重力コントロールによって通常では走行できないルートにアクセスが可能となった場合に、通常では走行できないルートのみに設置された一般ルートを走行している後続の移動体(或いは遊戯者が操作する移動体自体、或いは遊戯者が操作する移動体より先行する移動体)に対して影響を及ぼすことのできるスイッチを配置させることが可能である。このようなスイッチを配置しておくことで、単に、通常走行できないルートを走らせるだけではなく、通常走行できないルートに設けられたスイッチを積極的に探索することになり、より優位にゲームを進めさせることが可能となる。例えば、先行する遊戯者の移動体がスイッチを踏むことにより隠しルートが露出され、後続する遊戯者の移動体も有利に進める状況が発生する。このような事象は、移動体がスイッチを踏むことにより発生させる形態と、特殊モードにおける無重力(−G)の作用、或いは、重力方向の操作による重力(+G)の作用によってスイッチを作動させることにより発生させる形態とがある。
【0095】
また、特殊パスSPとしては、走行経路の両端に分岐点SPaと合流点SPbとが固定して設定されているものと、移動体60が通常パスNPから特殊パスSPへ移動する際に分岐点SPaが設定され、移動体60が特殊パスSPから通常パスNPへ戻る際に合流点SPbが設定される形態がある。例えば、隠し扉の開放により出現する特殊パスSPへの分岐点SPaは固定的なものであるが、無重力化した状態で空間を移動する空間中の特殊パスSPの場合は、その特殊パスSPへの分岐点SPaは、特殊モードの発動時点で設定される可変的なものである。また、合流点SPbは、前述のように、例えば遊戯者の指示によって特殊モードの発動が終了となったときは、自動的に設定される可変的なものである。その場合には、例えば移動体の中心を通る重力方向の直線と通常パスの路面との交点を合流点として設定する。
【0096】
次に、特殊モードの発動時における重力の作用について、特殊パスの具体例を示して説明する。
【0097】
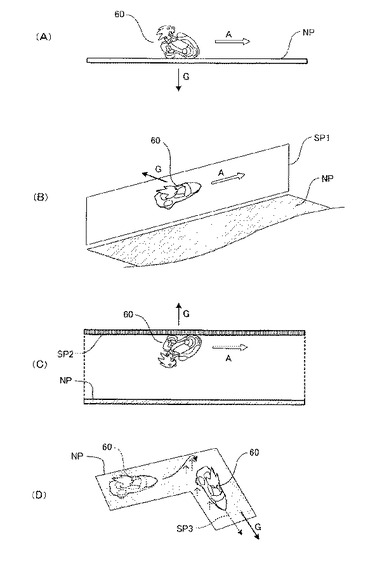
図14(A)は、移動体60が通常パスNPを進行方向Aに走行している状態を示している。図14(A)において、通常パスNPの路面を水平面と仮定すると、通常パスNPではその路面に対して垂直な重力Gが作用している。本実施の形態においては、レーシングゲームに用いるコースとして、このような通常パスNPの他に、特殊モードの発動時にのみ利用可能な図14(B)〜(D)に示すような特殊パスSP(SP1〜SP3)を予め設定若しくはレース中に動的に設定し、重力Gを操作することによって、通常は重力の作用によって走行できない特殊パスSPを走行可能としている。図14(B)の例は、壁面を特殊パスSP1として設定した例であり、図14(C)の例は、天井面をパスSP2として設定した例である。図14(D)に示される特殊パスSP3は、目視では見えないパスであり、遊戯者による重力制御によって形成される地上のパス(地上の空間をG方向に落下(G方向に引っ張る力によって空間内を移動)するパス)である。詳しくは、特殊パスSP3は、新しく指定されたG方向を重力方向としてその方向に移動体が引っ張られ、その引力又は引力と特殊パスSPに移る時点の移動体の慣性力とによって空間内を移動体が進行する状態となるときの進行経路である。
【0098】
例えば、図14(D)中の通常コースNPの直角コーナ直前で遊戯者が特殊モードを発動させると、通常時の重力が無重力化され、移動体60は路面から浮上する。その状態で図14(D)中の矢印G方向へ重力を発生させることで、重力によるG方向への自由落下による特殊パスSP3が形成され、その特殊パスSP3を移動体60が落下(空間を走行)することになる。
【0099】
このように、本実施の形態においては、現実世界ではありえない重力の制御を可能としている。そして、遊戯者(若しくはCPU)が重力の方向を操作することによって、非現実で意外性のある天井や壁面などの特殊パスを使用した走行を可能としている。例えば、遊戯者は、その特殊パスと重力エネルギーを利用することで、先行する他の移動体を追い越したり、周回遅れの移動体に邪魔されずに走行したり、急カーブや直角コーナをドリフト走行や限界のグリップ走行と比較して高速で走行したりすることが可能となる。
【0100】
次に、前記ステップS100における重力コントロールの処理について、図15のフローチャートの流れに沿って説明する。
【0101】
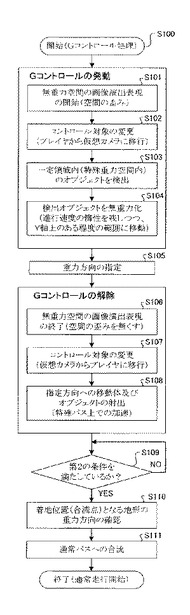
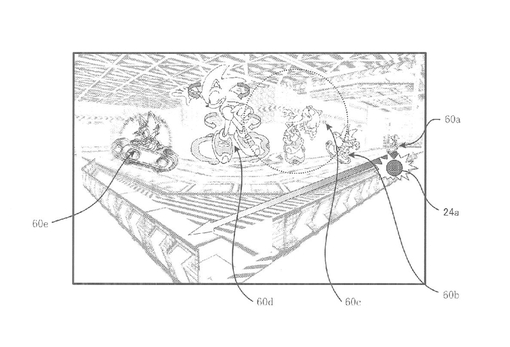
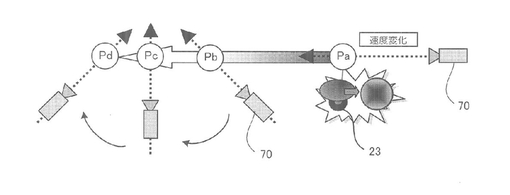
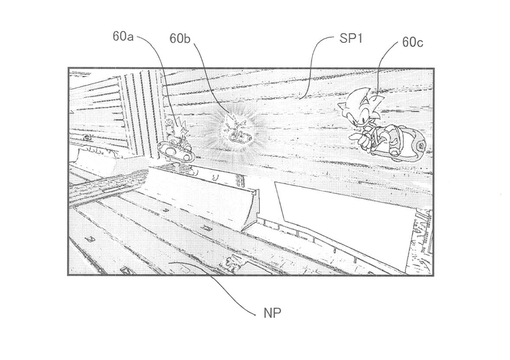
ゲーム処理手段11は、特殊モードの発動条件を満たしていると判定した場合は、先ず、重力を無重力化した空間の画像演出表現を開始する。以下、図16の模式図と、仮想カメラの動作例を示す図17を参照して説明する。図16は、例えば、図14(D)に例示したような急カーブを有する通常パスNPにおいて特殊モードが発動された場合の重力コントロールのイメージを示す模式図であり、図17は、そのときの仮想カメラの動作例を示す模式図である。そして、図17中のPa,Pb,Pc,Pdは、図16中の移動体60a,60b,60c,60dの位置を示している。
【0102】
ゲーム処理手段11は、操作ボタン24aの押圧操作の情報入力によって重力コントロール(Gコントロール)が発動されたことを検出すると、重力を無重力化した空間の画像演出表現を開始し(ステップS101)、ゲーム処理手段11によるコントロールの対象を移動体60(以下、遊戯者が操作する移動体を「プレイヤキャラクタ」と呼ぶ)から仮想カメラ70に移行する。詳しくは、通常時はプレイヤキャラクタ60の姿勢(進行方向)を操作するようにしているが、Gコントロール時はプレイヤキャラクタ60を中心に仮想カメラ70の位置を操作する(ステップS102)。
【0103】
ゲーム処理手段11は、無重力化する前のプレイヤキャラクタ60の処理として、プレイヤキャラクタ60の速度を所定の速度(例えば時速50km程度)まで徐々に速度を落とす処理を実行すると共に、その低速化する速度に比例して、操作している仮想カメラ70の動き(仮想カメラ70のロット変化)を高速化する処理を実行する。ここで言う仮想カメラ70の「ロット」とは、ROTATE(回転)を指しており、本実施の形態では、仮想カメラ70の注視点が方向キーの指定している方向に、プレイヤキャラクタ60を原点として円周移動する動きを指している。この円周移動は、初速と後半速度の段階変化をもっており、ゲーム処理手段11では、後半は加速度が増し若干早く移動するように、仮想カメラ70のカメラワークを制御している。
【0104】
図16の画像例では、図16中のプレイヤキャラクタ60aの位置からプレイヤキャラクタ60bの位置へとスピードダウンしながら移動させる。そのプレイヤキャラクタの移動動作に応じて、仮想カメラ70の位置を図17中のPaの位置からPdの位置へと移動させると共に、図17中の矢印に示すように、仮想カメラ70の方向を円周移動させる。その間、重力コントロール(特殊モード)の発動時点から周囲の重力をチャージする処理を実行し、重力のチャージ量の記憶値を逐次加算する。また、プレイヤキャラクタ60aからプレイヤキャラクタ60bの位置へとスピードダウンしながらの移動量を、順位に応じて変動させてもよい。この場合、遊戯者に気づかれることなく、各移動体同士の距離が短くなるため、より緊迫したレース展開をすることが可能となる。
【0105】
ゲーム処理手段11は、上記処理を実行すると共に、一定領域内(前述の特殊重力空間GS内)のオブジェクトを検出し(ステップS103)、検出オブジェクトを無重力化する処理を実行する。その際、背景オブジェクトを含む特殊重力空間GS内の各オブジェクトを対象として、各オブジェクトのポリゴンの頂点座標を変更して形状を変化させる等の画像処理によって、重力空間から無重力空間への遷移過程における重力の変化を空間(時空構造)の歪みとして表現するようにしている。画像上では例えば空気の流れが変わった様なイメージで表現する。図16の画像例では、歪んだ空間内でプレイヤキャラクタの姿勢と地面からの高さを徐々に変化させながら、図16中のプレイヤキャラクタ60bの状態からプレイヤキャラクタ60cの状態へと遷移させるようにしている。そのときの特殊重力空間GS内のオブジェクト(プレイヤキャラクタと検出オブジェクト)に対しては、一定範囲内の高さまで上昇する力を付加して地面から浮上させる処理(当該オブジェクトのポジションをY軸上のある程度の範囲に移動させる処理)を実行する。なお、その際の浮上範囲は、本実施の形態では固定ではなく、乱数値を持たせて多少変動させるようにしている。前述のコース短縮制御ステップにおいては、無重力の影響を受けたブロックが空中に飛び散って行く様子を示す画像を表示する。そして、コースの短縮処理においては、短縮後のコースが再設定され、変形されたコースマップ(図5中のコースマップG2)が表示される(ステップS104)。
【0106】
遊戯者は、このような無重力空間の演出画像を見ながら、図17中に示すように、アナログジョイスティック23の傾動操作により重力の方向を指定すると共に(ステップS105)、重力コントロールの解除のタイミングを図って重力コントロールの解除指示(本例ではチャージした重力の開放指示)を行う。
【0107】
ゲーム処理手段11は、重力コントロールの解除指示を入力するまでの間、図16中のプレイヤキャラクタ60dに示すように、例えば、キャラクタの顔部は進行方向、腹部はねじれて仮想カメラ70の方向に向けると言うように、仮想乗物に乗ったキャラクタの頭部、腹部の動きをそれぞれ仮想カメラ70のYロット(rot)を遊戯者の操作やカメラ位置に合わせて制御する。さらに、前述のように、プレイヤキャラクタ60の移動動作に応じて、仮想カメラ70の位置を移動させると共に、プレイヤキャラクタ60を原点として仮想カメラ70の注視点を円周移動させ、重力を開放する方向を見出す。
【0108】
ゲーム処理手段11は、重力コントロールの解除指示を検出すると、無重力空間の画像演出表現の処理を終了し(ステップS106)、コントロールの対象を仮想カメラ70からプレイヤキャラクタ60に移行する(ステップS107)。そして、アナログジョイスティック23の傾動操作により指定された重力(G)の方向へ、プレイヤキャラクタ60及び特殊重力空間GS内の検出オブジェクトを射出させる。その際の射出方向(チャージした重力を開放する方向)は遊戯者の指定した方向であり、射出速度は、例えば前述のように無重力状態の継続時間(重力コントロールの発動指示の時点から解除指示の時点までの重力のチャージ量)に応じた速度(最高速度は例えば時速200km)である。プレイヤキャラクタ60を射出する際には、ゲーム処理手段11は、仮想カメラ70の画角を広域化し、上記速度で瞬間的に加速するプレイヤキャラクタ60をその画角で捉えて撮像し、図16中のプレイヤキャラクタ60eに示すように、例えばリング状の効果線をエフェクト画像としてプレイヤキャラクタ60eの周りに描画すると共に、画面効果としてブラー(blur)を施した画像を表示するようにしている。このような画像処理によって、重力エネルギーが放出されてプレイヤキャラクタ60eが瞬間的に加速する状態を表現する(ステップS108)。
【0109】
なお、上述のような重力コントロールは、好ましい実施の形態では、以下の2種類のパターンPT1,PT2を用意している。
(PT1)図15の画像例のように、通常走行時に仮想重力のエネルギーを指定方向へ開放すると、その重力コントロールによってプレイヤキャラクタ60が急なカーブ(コーナ)を曲がることを目的とした重力変化を起こすパターン。
(PT2)コース内に設置されたキッカ等を利用してトリック発動後に仮想重力のエネルギーを指定方向へ開放すると、その重力コントロールによって、特殊パスとして設定されている壁や天井といった3次元ルートを選択することを目的とした重力変化を起こすパターン。
【0110】
上記2つのパターンにおいては、ゲーム処理手段11は、プレイヤキャラクタ60自身の挙動或いは周囲のオブジェクトに与える影響には全く差別化を行っていないが、パターンPT2の場合のみ、プレイヤキャラクタ60を射出した後において仮想3次元空間上に設定されている地上以外に設定されている地上パス(つまり壁や天井といった特殊パス)を検知するようにしている。処理パターンを分けているのは、3次元ルートに移る際のルールを遊戯者に明確に伝えることと、及び、ゲーム処理手段11によるパス検知の処理負荷(頻度)を軽減化することを目的としている。なお、上記PT2の処理パターンの重力コントロールのみとしたシステムとしても良い。
【0111】
また、他の実施形態としては、上記パターンPT2において通常パスから特殊パスへ移行する際に、キッカ等を利用せずに、無重力で浮上した状態で仮想重力のエネルギーを特殊パスの方向へ向けて開放し、それによって特殊パスへ移行させる形態としても良い。その場合においても同様の画像処理をして、通常の重力空間から無重力空間へ遷移する過程での各オブジェクトの状態変化や、重力が開放されて特殊パス上を加速するプレイヤキャラクタ60の様子を表示するようにしても良い。例えば、図14(B)に例示した壁面の特殊パスSP1の場合は、図18に示すように、プレイヤキャラクタ60の様子を示す画像60a(図18の例ではキッカを利用して壁面の特殊パスSP1へジャンプして移動した画像例)において、無重力により浮遊した状態を示す画像を表示し、仮想重力のエネルギーを壁面に向けて開放されると、プレイヤキャラクタ60aを壁面に移動させた状態の画像を表示し、その後、壁面に移動した状態で特殊パスSP1の進行方向に瞬間的に加速する様子を示す画像60bを経由して画像60cへと変化させて表示するようにしても良い。
【0112】
前記ステップS108の処理に続いて、ゲーム処理手段11は、特殊パスを走向中のプレイヤキャラクタ60について、その特殊パスの走行終了の条件(「第2の条件」とする)を満たしたか否かを判定する。ここで言う「第2の条件」とは、例えば、遊戯者による特殊モードの発動終了指示(操作コントローラ2からの特殊モード発動終了指令の入力)を受付けたこと、あるいは特殊パスの終了地点(通常パスとの合流点)にプレイヤキャラクタ60が到達したことである(ステップS109)。
【0113】
上記ステップS109において第2の条件を満たしていると判定した場合は、ゲーム処理手段11は、プレイヤキャラクタ60が特殊パス上を移動する状態(本例ではプレイヤキャラクタ60が空間中の特殊パスをG方向へ落下する状態)の画像を表示すると共に、プレイヤキャラクタ60eの着地位置(特殊パスから通常パスへの合流点)となる地形の重力方向(XYZ軸+/−方向)を確認し(ステップS110)、プレイヤキャラクタ60の姿勢をG方向(射出方向)から通常の重力方向へと変化させながら、プレイヤキャラクタ60を着地位置へと着地させ、通常パスへと合流させる(ステップS111)。そして、ゲーム処理手段11は、特殊モードを解除して重力コントロールの処理を終了する。
【0114】
なお、上記ステップS110、S111においてプレイヤキャラクタ60を地上に戻す処理形態としては、前述のように、(T1)強制的に着地位置へ落下させる形態、(T2)地形の角度を徐々に変化させ、地続きで地上に戻す形態、(T3)特殊パスに移る際と同様に、遊戯者の重力操作に応じて地上に戻す形態がある。上記(T3)の形態の場合は、遊戯者は、地形側に重力方向を指定しており、遊戯者は、特殊パス上を移動するプレイヤキャラクタ60eと前方の地形とを示す画像を見て射出方向にある地形の重力方向を予測し、操作コントローラ2を操作してキャラクタ61の姿勢を変化させながらプレイヤキャラクタ60eを着地させ、通常パスへと合流させる。ゲーム処理手段11では、操作コントローラ2からの操作情報、通常パスの地形情報、及び移動体の位置情報に基づいて、特殊パス上を移動中のプレイヤキャラクタを通常パスへ合流させる処理を実行し、その演出画像の画像情報を生成してディスプレイ31に表示する。
【0115】
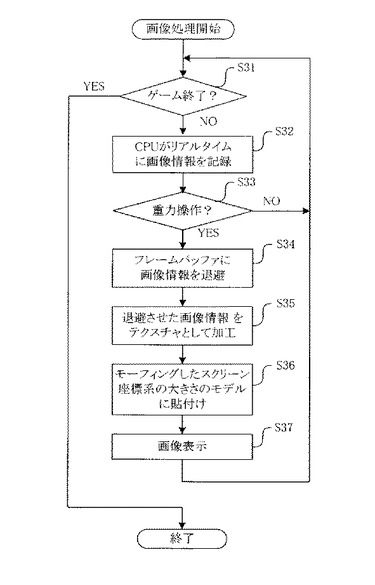
次に、特殊モードでの重力操作時の画像処理と音楽の変更処理について説明する。先ず、重力操作時の画像処理について、図19のフローチャートの流れに沿って説明する。
【0116】
ゲーム処理手段11は、全ての移動体60(単独走行のゲームではプレイヤキャラクタ60)がゴール位置に到達したか否かを判定することにより、ゲームが終了したか否かを判定し(ステップS31)、ゲームが終了したと判定した場合は、レーシングゲームの終了処理(プレイヤキャラクタ60の順位や遊戯者の操縦技術に関する評価値等の結果表示)を行って、当該コースでのゲームを終了する。
【0117】
ステップS11において、ゲームが終了していないと判定した場合は、画像情報生成手段が、現在のプレイヤキャラクタ60の位置情報や地形情報に基づいて画像情報を生成すると共に、生成した画像情報をグラフィックメモリ14bにリアルタイムに記録する(ステップS32)。そして、座標変換処理やレンダリング処理を実行した後のゲーム画像をディスプレイ31に表示させる。
【0118】
続いて、ゲーム処理手段11は、遊戯者の操作が特殊モードにおける重力操作か否かを判定し(ステップS33)、重力操作でない場合はステップS11に戻って処理を繰り返し、重力操作と判定した場合は、特殊重力空間内のオブジェクト(3次元ポリゴンモデル)の画像情報をフレームバッファに退避させ(ステップS34)、退避させた画像情報をテクスチャとして、画像情報生成手段によって当該オブジェクトの画像データを加工する。その際、例えば、3次元座標系において、歪みのない通常のオブジェクト(3次元ポリゴンモデル)の形状から、重力の変化に応じて歪みを施したオブジェクトの形状へと、モーフィング処理により徐々に変形させる画像処理を行うことにより、無重力化に伴うオブジェクトの状態変化や、重力方向の変化に伴うオブジェクトの状態変化を表現する。また、重力の開放指示により当該オブジェクトを重力方向へ射出する処理の際には、前記ステップS108で述べたように、テクスチャ画像にブラーを施したり、エフェクト画像を合成したりするなどの画像加工処理を行うことによって、重力が放出されて瞬間的に加速する状態などを表現する(ステップS35)。
【0119】
そして、歪みのない通常の形状から歪みを施した形状へとオブジェクトの形状を変形させながら、モーフィングした3次元ポリゴンモデルのテクスチャ画像をスクリーン座標系の大きさのモデルに貼付け(ステップS36)、特殊重力空間内の当該オブジェクトの画像と特殊重力空間外の画像とを合成した画像を表示し(ステップS37)、ステップS31に移行し、ステップS31においてゲーム終了と判定するまで画像処理を繰り返す。
【0120】
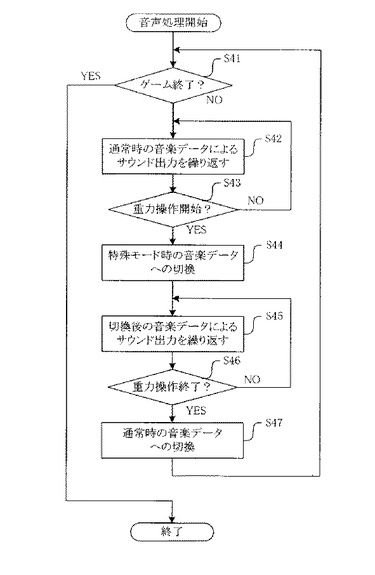
次に、特殊モードでの音楽の変更処理について、図20のフローチャートの流れに沿って説明する。
【0121】
ゲーム処理手段11は、ゲームが終了したか否かを判定し(ステップS41)、ゲームが終了していない場合は、音声情報生成手段によって生成された通常時の音声情報に基づいて、BGM等の音声データを音声処理回路15を介して生成し、通常時の音楽データによるサウンド出力を繰り返す(ステップS42)。上記ステップS42の処理中に重力操作が開始されたと判定した場合は、通常時の音楽データから、特殊モード時の音楽データ(例えば重力の変化や空間の歪みを表現する独特の効果音を有する音楽データ)に切換え(ステップS43、S44)、切換後の音楽データによるサウンド出力を繰り返す(ステップS45)。そして、重力操作が終了したと判定した時点で(ステップS46)、特殊モード時の音楽データから通常時の音楽データに切換え(ステップS47)、ステップS41に移行して処理を繰り返す。そして、ステップS41においてゲーム処理手段11がゲーム終了と判定した時点で、レース中の音声処理を終了する。なお、通常時の音楽データを複数用意しておき、重力操作がされるたびに、上記ステップS47において前の通常走行時とは別の音楽データへ切換るようにしても良い。
【0122】
なお、上述した実施の形態では、重力コントロール実施後の重力の効果は、移動体の属性に依存しない形態としているが、移動体の属性(仮想乗物に乗るキャラクタのタイプ、仮想乗物の種類、パーツの装着によるカスタマイズ後の仮想乗物の形態など)に応じて重力の効果に差を生じさせる形態としても良い。
【0123】
例えば、第1の例としては、コース短縮制御ステップにおいて、キャラクタのタイプに応じて、重力コントロール時に飛ばすことができる部品オブジェクトの量を変化させる形態とする。例えば、先頭を走るキャラクタがスピードタイプ、フライタイプであるよりも、パワータイプが先頭を走ったときの方が、飛ばされる部品オブジェクトの量が多くなるため、その分ルートも短くなりやすいなど、キャラクタのタイプに応じて、無重力の影響を及ぼす部品オブジェクトの量を変化させる形態とする。
【0124】
第2の例としては、特殊パス制御ステップにおいて、スピードタイプのキャラクタを標準として、フライタイプのキャラクタは、重力コントロールの発動のためのポイントは溜まりやすいが、実際に発動した後の発動時間が短い一方、パワータイプのキャラクタは、重力コントロールの発動のためのポイントは溜まりにくいが、実際に発動した後の発動時間が短いなど、キャラクタのタイプに応じて、重力コントロールの発動要件や発動時間を調整する形態とする。
【0125】
第3の例としては、特殊パス制御ステップにおいて、キャラクタのタイプに応じて、重力コントロール時の特殊パスへのアクセスを制限する形態とする。例えば、特殊パスが地上、壁、天井に設定されている場合、スピードタイプとパワータイプは、重力コントロール時に地上あるいは壁を短時間しか走行できないが、フライタイプに限り天井を長時間走行可能とする形態とする。
【0126】
また、上述した実施の形態では、コース短縮制御ステップの処理に関し、走行経路部の部品を削除することによって短縮したコースを自動的に再設定する形態を説明したが、部品を削除する形態は、部品オブジェクトを実際に削除する形態に限るものではなく、オブジェクトを縮小して部品オブジェクトを仮想的に削除する形態も含まれる。
【0127】
また、上述した実施の形態にいては、家庭用ゲーム装置に適用した場合を例として説明したが、本発明は、家庭用ゲーム装置に限らず、業務用ゲーム装置やゲーム機能を有する一般的な携帯電話機にも適用可能である。
【図面の簡単な説明】
【0128】
【図1】本発明が適用される家庭用ゲーム装置の一例を示す外観図である。
【図2】図1に例示した家庭用ゲーム装置のハードウェア構成の一例を示すブロック図である。
【図3】本発明に係るコースの基本構成の一例を示す模式図である。
【図4】本発明に係る移動体の例を示す模式図である。
【図5】本発明に係るレーシングゲームの画像例を示す図である。
【図6】本発明に係る特殊モードでの重力の作用範囲を説明するための図である。
【図7】本発明に係るレーシングゲームの全体の流れを説明するためのフローチャートである。
【図8】本発明に係るコース短縮制御ステップにおける処理の詳細を説明するためのフローチャートである。
【図9】本発明に係るコースの構成部品の例を示す模式図である。
【図10】図9の構成部品を組み合わせて形成されるコースの部位の例を示す模式図である。
【図11】本発明に係るコースの一例を示す平面図である。
【図12】本発明に係るコースの短縮処理を説明するための模式図である。
【図13】本発明に係る特殊パスを説明するための図である。
【図14】本発明に係る特殊パスにおける移動体の走行状態を説明するための図である。
【図15】本発明に係る重力コントロールの処理を説明するためのフローチャートである。
【図16】本発明に係る重力コントロールのイメージを示す第1の模式図である。
【図17】本発明に係る特殊モードでの仮想カメラの動作例を示す模式図である。
【図18】本発明に係る重力コントロールのイメージを示す第2の模式図である。
【図19】本発明に係る重力操作時の画像処理を説明するためのフローチャートである。
【図20】本発明に係る重力操作時の音声処理を説明するためのフローチャートである。
【符号の説明】
【0129】
1 ゲーム機本体
2 操作コントローラ
3 テレビジョン受像機
4 外部記憶媒体
5 通信ネットワーク
10 制御基板
11 CPU
12 ROM
13 RAM
14 画像処理回路
14a GPU
14b グラフィックメモリ
15 音声処理回路
15a SPU
15b サウンドメモリ
16 入出力機器用I/F回路
16a 操作コントローラ用I/F回路
16b 画像データ出力用I/F回路
16c 音声データ出力用I/F回路
16d DVD−ROM読取装置用I/F回路
17 通信用I/F回路
18 バス
20 外部記憶媒体読取装置
50 コース
51 コース形成用パーツ(コース構成要素)
51a 単体ブロック
51b 単体鉄骨オブジェクト
51c 単体ガードレール
52 直線状走行路
53 ドーム型屋根
54 空間部
60 移動体
61 キャラクタ(仮想の遊戯者)
62 仮想乗物
63 建造物オブジェクト
63a 壁(壁面部)
63b 屋根(天井面部)
63c トンネル状通路
63d 改札口(開閉扉部)
63e 高架
63f 線路脇の壁(壁面部)
63g 建物
64a キッカ(ジャンプ台)
64b 階段
64c タービュランス
65 アイテム
66 一般車両オブジェクト
66a タクシー
66b 列車
70 仮想カメラ
NP 通常パス
SP 特殊パス
SPa 分岐点
SPb 合流点
【技術分野】
【0001】
本発明は、操作者が操作する移動体を含む複数の移動体を仮想空間内で競争させるレーシングゲーム装置のプログラム及びそのプログラムを格納した記録媒体、並びにレーシングゲーム装置に関する。
【背景技術】
【0002】
遊戯者が操作する仮想の自車と他車とを仮想空間内で走行させて競争させるレーシングゲーム装置は、従来から広く知られている。このようなレーシングゲーム装置においては、遊戯者の操作する自動車等の移動体とコンピュータ又は他の対戦者が操作する移動体とがコース上で抜きつ抜かれつの白熱した攻防を展開することが大きな楽しみであるが、リアリティの追求に重点を置きすぎると、仮想空間内を疾走することならではの、現実世界ではありえない意外性のある非現実な特殊動作や演出効果で遊戯者を楽しませるという側面が手薄となってしまうという課題がある。このような課題に対して、近年では、現実に存在するスポーツカーやレーシングカーのように実際の車の形状や性能を忠実に模擬したものを使用せずに、架空の乗物を移動体として用いて仮想空間内を走行させるレーシングゲームがあるが、更なる爽快感やダイナミック感、意外性が求められている。
【0003】
一方でこうしたレーシングゲームにおいて、特定のハンデがないと、初心者と熟練者が同時に楽しむことができなかった。初心者と熟練者のハンデをなくすために、順位の低いものに対して車の速度を自動的に上げるものが既に存在している。しかし、そもそも操作が出来ない初心者にとって、スピードが上がったとしても、自分の制御の範囲を超えたスピードでゲームが展開するために、かえって困難となるという弊害があった。
【0004】
初心者と熟練者を考慮したゲーム装置としては、例えば、特定ポイントを通過するごとに、先頭から順に自機のサイズが小さくなるようにしたゲーム装置が提案されている(例えば特許文献1を参照)。このようなゲーム装置においては、自機が小さくなることで操作しやすくなる半面で、サイズが小さくなることで遊戯者にとっては違和感が生じることが考えられる。他の例としては、例えば、特定キャラクタとの位置関係に基づいて、遊戯者が操作するキャラクタ(あるいはCPUが操作するキャラクタ)の移動速度が一律に変更するようにしたものが提案されている(例えば特許文献2を参照)。このゲーム装置では、自分の意識下での制御による速度変更が生じるため、違和感が生じ、また初心者にとってはかえって操縦が困難となり好ましくないと考えられる。
【0005】
【特許文献1】特開2006−081753号公報
【特許文献2】特開2003−103048号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、上述のような従来のレーシングゲーム装置が有する様々な問題に鑑みて成されたものであり、本発明の目的は、意外性に富み、現実世界ではありえない仮想空間内独特のレースを展開させることが可能で、且つ、遊戯者に違和感や不公平感を感じさせることなく、移動体が走行するコースをレース中に変化させることが可能なレーシングゲーム装置のプログラム、そのプログラムを格納した記録媒体、及びレーシングゲーム装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明は、レーシングゲーム装置のプログラム、そのプログラムを格納した記録媒体、及びレーシングゲーム装置に関するものであり、ゲームプログラムに関しては、本発明の上記目的は、遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、前記ゲーム処理ステップは、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、各移動体が第1の条件を満たしているか否かを判定するステップと、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、前記削除するステップによって削除されたパスを短縮するステップと、を含むことによって達成される。
【0008】
あるいは、本発明の上記目的は、遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、前記ゲーム処理ステップは、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、各移動体が第1の条件を満たしているか否かを判定するステップと、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、前記削除するステップによって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とするステップと、を含むことによって達成される。
【0009】
また、本発明の上記目的は、前記ゲーム処理ステップは、前記複数部品の一部を削除するステップにより部品が削除された場合に、新しいパスを出現させる事象を発生させるステップを更に含むこと、前記複数部品の一部を削除するステップは、前記移動体の周囲に設定された空間内を対象として前記削除の処理を実行すること、前記ゲーム処理ステップは、前記特殊モードが発動された際に無重力の状態を発生させるステップを更に含み、前記複数部品の一部を削除するステップは、前記無重力の発生に応じて前記削除の処理を実行すること、によってそれぞれ一層効果的に達成される。
【0010】
また、情報記憶媒体に関しては、本発明の上記目的は、上記ゲームプログラムを記憶した構成とすることによって達成される。
【0011】
また、ゲーム装置に関しては、本発明の上記目的は、遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、前記ゲーム処理手段は、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、各移動体が第1の条件を満たしているか否かを判定する手段と、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除する手段によって削除されたパスを短縮する手段と、を含むことによって達成される。
【0012】
あるいは、本発明の上記目的は、遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、前記ゲーム処理手段は、前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、前記削除する手段によって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とする手段と、を含むことによって達成される。
【発明の効果】
【0013】
本発明によれば、移動体の走行経路の一部を複数部品で構成したコースを仮想空間内に設定し、特殊モードが走行経路に対して発動された場合、その走行経路の部品を削除するようにしている。そのため、移動体の走行中に走行経路の一部が消失する事象を発生させるなど、意外性に富み、仮想空間内独特のレースを展開させることが可能となる。また、走行経路の一部が削除された際に、特殊モードの発動により、各移動体のコース上の走行距離が自動的に短縮するようにコースを再設定する形態とすることにより、遊戯者に違和感や不公平感を感じさることなく、移動体が走行するコースをレース中に変化させることが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好適な実施の形態について図面を参照して説明する。
【0015】
図1は、本発明が適用される家庭用ゲーム装置の一例を示す外観図あり、このゲーム装置は、一般的な家庭用ゲーム装置の例を示している。図1において、ゲーム装置の本体1(以下「ゲーム機本体」と呼ぶ)には、操作信号の入力端子(12a〜12d)と、映像信号及び音声信号の出力端子とが設けられており、操作者が操作する操作コントローラ2が接続ケーブル7を介して接続され、ゲーム画像などを表示するための表示装置3が映像/音声接続ケーブル6を介して接続される。
【0016】
コンピュータをゲーム処理手段として機能させるためのゲームソフトウェア(ゲームプログラム及び制御データ類)は、本例では外部記憶媒体4に格納されており、その外部記憶媒体4(本例ではDVD−ROM)は、ゲーム機本体1に設けられている蓋体14の部分から装填される。画像表示手段としての表示装置3は、本例ではテレビジョン受像機であり、ディスプレイ(画像表示装置)31とスピーカ32a,32bと映像/音声入力端子(映像信号入力端子33及び音声信号入力端子34,35)とを備えている。
【0017】
操作コントローラ2には、ゲームの開始を指令するスタートボタン21と、アナログジョイスティック22,23と、各種操作ボタン24と、方向キー25とが配設されており、これらの入力操作スイッチには、遊戯するゲームに応じて様々な機能が割り当てられている。本例では、4つの操作コントローラ2がゲーム機本体1に接続可能であり、最大4人の遊戯者が1つのゲームに同時に参加してゲームを楽しめるように構成されている。
【0018】
このような構成において、ゲーム装置は、操作コントローラ2から出力される入力操作情報に基づいてゲームプログラムを実行し、ゲームに係る画像データと音声データを生成して、テレビジョン受像機3のモニタ(ディスプレイ31)にゲーム画像を表示すると共にスピーカ32a,32bから効果音等を発生させる。
【0019】
図2は図1に例示したゲーム装置のハードウェア構成の一例を示すブロック図である。ゲーム機本体1には、制御基板10と外部記憶媒体4の読取装置20(本例ではDVD−ROM読取装置)とが内蔵されている。なお、説明の便宜上、本発明に係るレーシングゲームの処理を実行する全体の情報処理手段を「ゲーム処理手段」として定義し、画像情報生成手段や音声情報生成手段については、ゲーム処理手段の一部の構成要件として説明する。
【0020】
制御基板10には、ゲームプログラムに従って動作するゲーム処理手段としてのメインCPU(Central Processing Unit)11と、主記憶手段としてのROM(Read Only Memory)12及びRAM(Random Access Memory)13と、ゲームプログラムによって生成された画像情報を基に、画像表示装置31に出力する映像信号を生成する画像処理回路14と、スピーカ32に出力する音声信号を生成する音声処理回路15と、入出力制御手段としての入出力機器用I/F(interface)回路16と、通信制御手段としての通信用I/F回路17とが搭載され、これらはバス18を介して接続されている。
【0021】
ROM12にはゲーム装置の起動用プログラム等の基本ソフトウェアが格納されており、RAM13には、ゲームの進行に従って得られる移動体の移動情報や仮想空間の地形情報などが一時的に記憶される。
【0022】
画像処理回路14は、CPU11からの指示に応じて動作するGPU(Graphics Processing Unit)14aとグラフィックメモリ14b等から構成され、画像情報生成手段としてCPU11を機能させるゲームプログラムに従って生成された画像情報(3次元仮想空間にモデル化されたポリゴンオブジェクト,仮想光源,仮想カメラなどの情報)に基づいて、3次元座標から2次元座標への座標変換処理やレンダリング処理(シェーディング,テクスチャーマッピング,レートレーシング法,ラジオシティ法などによる画像処理)を行い、ゲーム画像を画像表示装置31に表示させる処理を行う。なお、GPU14aやレンダリングプロセッサなどの3次元グラフィックス処理用の補助プロセッサを備えていないゲーム装置の場合は、ゲームプログラムによって上記のような座標変換処理やレンダリング処理などを実行する形態となる。
【0023】
音声処理回路15は、SPU(Sound Processing Unit)15aとサウンドメモリ15b等から構成され、音声情報生成手段としてCPU11を機能させるゲームプログラムに従って生成された音声情報に基づいて、効果音等の音声データを生成して音声信号を出力する処理を行う。
【0024】
入出力機器用I/F回路16は、本例では、操作コントローラ用のI/F回路16a、画像データ出力用のI/F回路16b、音声データ出力用のI/F回路16c、及びDVD−ROM読取装置用のI/F回路16dを備えている。通信用のI/F回路17は、インターネット通信網等の通信ネットワーク5を介したオンラインゲームを行う場合などに使用される通信制御手段である。
【0025】
なお、操作者が移動体を操作する移動体操作手段としての操作コントローラ2は、図1に例示した操作コントローラ2の構成に限るものではなく、ワイヤレスの操作コントローラや、コントローラ本体の動きを検知するセンサ(コントローラの画面に対する位置や方向、コントローラの傾きやX,Y,Z軸方向の加速度を検知するセンサなど)を備えたものや、タッチパネルやデジタイザ等のポインティングデバイスにて構成されたものなど、遊戯者が入力操作した情報をゲーム装置側に伝達できるものであれば良い。また、ゲームソフト(ゲームプログラム及びデータ)を格納する外部記憶媒体4は、DVD−ROMに限るものでなく、コンピュータにより読取可能な任意の情報記憶媒体を用いることができる。また、ゲーム機本体1内のRAM13若しくは他の内部記憶媒体にネットワークを介してゲームソフトをダウンロードする形態とした場合は、外部記憶媒体4及びその読取装置20は不要である。
【0026】
次に、本実施形態に係るコンピュータゲームの概要について説明する。
【0027】
本発明は、遊戯者の操作に応答して移動する移動体を含む複数の移動体を仮想三次元空間内で競争させるコンピュータゲーム(「レーシングゲーム」と呼ぶ)に好適に適用されるものであり、以下、レーシングゲームに適用した場合を例として説明する。
【0028】
図3は、仮想空間内に設定されるコース(走行路)50の基本構成の一例を示している本実施形態に係るレーシングゲームは、操作者(以下「遊戯者」と呼ぶ)が操作する移動体を含む複数の移動体60が、仮想空間内に設定された3次元形状のコース50を走行して競争するゲームである。図3のコース50の例では、遊戯者又はCPUによって操作される各移動体60が、スタート地点STからスタートして環状のコース50を規定回数周回し、ゴール地点(地点ST又は他の地点)に達した順位で勝敗を決定する。図3中の矢印R1〜R5に沿った走行経路NPは、通常走行時に使用する第1のパス(以下「通常パス」と呼ぶ)であり、この他に、後述する特殊モードの発動時にのみ使用することができる特殊な走行経路として第2のパス(以下「特殊パス」と呼ぶ)が設定されている。
【0029】
コース50を走行する移動体60は、本例では、図4(A)〜(C)に示すようなキャラクタ(仮想の遊戯者)61が乗った仮想乗物62である。図4(A)に示される仮想乗物62aは、エア(空気)の力を利用して地上との間に空気の層を形成し、その上をスノーボードやサーフィンボードのように滑走する形態の「エアライド」と称する架空の乗物である。図4(B)に示される仮想乗物62bは、地面に接地して走行するバイク型の乗物であり、図4(C)に示される仮想乗物62cは、地上との間に仮想の海の層を形成し、その上を高速艇のように滑走する形態の「ホイールヨット」と称する架空の乗物62aである。
【0030】
遊戯者は、このような移動体60の動作を操作コントローラによって操作する。例えば、図1に例示した操作コントローラ2を用いた場合は、操作ボタン24の押圧操作によって仮想乗物62の加速や減速を操作する。また、キャラクタ61の姿勢を左右に傾けて移動体60の重心を移動させたい場合や、仮想乗物62を上下左右に移動させたい場合は、アナログジョイスティック22又は23の傾動操作によって方向を操作する。また、後述する特殊モードの発動時に物理的な重力(G)の方向を変更したい場合も、アナログジョイスティック22又は23の傾動操作によって重力の方向を指定して変更する。
【0031】
これらの仮想乗物62は、加速性能,減速性能,コーナリング性能,最高速,ジャンプ力,回頭性,燃費など、それぞれ異なる走行性能が割り当てられており、仮想乗物62の走行性能を変化させるパーツも用意されている。遊戯者は、このような各種の仮想乗物62の中から、コースロケーションに応じて自分好みの仮想乗物62を選択してレースに参加する。また、仮想乗物62の乗るキャラクタ61についても複数の種類が設定されており、自分好みのキャラクタ61を選択可能としている。なお、初期の乗物62は、例えば図4(A)の乗物62a(エアライド)というように予め設定されている。その後は、レース中に貯めたポイントを用いて好みの乗物を購入することが可能である。なお、パーツの部分を購入して自分の乗物をカスタマイズできる形態としても良い。
【0032】
ここで、キャラクタ61のタイプについて説明する。
【0033】
キャラクタ61のタイプには、スピードタイプ、フライタイプ、パワータイプ等の複数のタイプが設定されており、レース中にそれぞれのタイプのキャラクタが所有する特徴的な能力(キャラクタ特有の性格や技術)を発揮することにより、その能力に応じた特定のアクションを起こすことが可能に設定されている。
【0034】
スピードタイプのキャラクタは、レール状の細長い走行経路で形成されたパス(レールウェイと呼ぶ)に、仮想乗物62をアクセスさせる能力を身に着けたキャラクタである。フライタイプのキャラクタは、コース上に設置された専用のギミック上を通過することにより、仮想乗物を飛行させる能力を身に着けたキャラクタである。このフライタイプのキャラクタは、例えば、コース上に設置されたジャンプ台の上を通過することで空中を滑空させることが可能である。パワータイプのキャラクタは、走行経路上に設置された障害物(移動体60のの進行を邪魔するもの)を破壊する能力を身に着けたキャラクタであり、その能力を発揮して前方の障害物などを破壊することにより、障害物を回避せずに仮想乗物を走行させることが可能である。
【0035】
図5は、移動体60が通常パスNPを走行中のゲーム画像の一例を示しており、同図に示すように、ゲーム画像としては、例えば移動体60を仮想カメラによって捉えた画像が画面G1上に表示されると共に、画面G1上の所定位置にコースマップG2が合成して表示される。コースマップG2としては、例えばコース全域の縮図G2aと現在の走行位置を示すシンボル画像G2bとが表示される。また、画面G1上には、走行状況を示す情報として、現在のラップタイム、走行速度、周回数等の情報が表示される。図5中のリング状のアイテム65は、移動体60がリング部を通過して獲得することでポイントが貯まるアイテムである。本例でのポイントは仮想のお金であり、乗物やパーツを購入するために使用される。
【0036】
次に、本発明に係る特殊モードにおけるゲームの処理形態について説明する。
【0037】
本実施形態に係るレーシングゲームは、一般に設けられた道路を走行するのではなく、仮想空間内を疾走するレーシングゲームであるため、仮想空間内独特のレースを展開させるようにしている。本発明の好ましい実施形態においては、重力の操作が可能な特殊モードを設け、仮想空間ならではの特殊な操作(重力操作)によって様々な事象を発生させるようにしている。
【0038】
第1の処理形態においては、例えば、特殊モードの発動時に周囲の重力エネルギーを吸収して無重力状態を発生させ、その無重力の影響によってコースの一部が破壊する事象(コースの一部が飛び散って消失する事象)を発生させるようにしている。さらに、上記事象によって走行部分が消失した時には、レースを中断することなく、走行方向のコース長を短縮したコースを自動的に再設定するようにしている。また、上記事象によって新しいパス(通常パス又は特殊パス)を出現させる事象を発生させるようにしている。
【0039】
第2の処理形態においては、現実世界では重力の作用によって物理的に不可能な天井や壁などの走行経路を特殊パスとして設け、特殊モードの発動時には重力の操作によって当該特殊パスの走行を可能としている。
【0040】
その他、各種の事象を発生させるための複数種類のスイッチオブジェクトをコース内に設定しておき、第1の処理形態においては無重力(−G)の作用によって、第2の処理形態においては重力(+G)の作用によって当該スイッチを作動し、そのスイッチの属性に対応するアクションを起動するなど、様々な事象を発生させるようにしている。
【0041】
上記第1及び第2の処理形態は、独立した処理形態としても良いが、両者の処理形態を組み合わせた処理形態とすることも可能である。なお、説明の便宜上、上記第1の処理形態におけるゲーム処理ステップを「コース短縮制御ステップ」と称し、上記第2の処理形態におけるゲーム処理ステップを「特殊パス制御ステップ」と称して説明する。
【0042】
先ず、本発明に係る重力(G)の制御について説明する。
【0043】
移動体60に作用する重力は、現実世界では万有引力と天体(地球)の自転による遠心力との合力であり、3次元座標系のXZ面(水平面)に対して略垂直方向に作用するが、本発明に係るコンピュータゲーム上の仮想世界においては、操作コントローラ2の操作によって重力が作用する方向を変更できるようにしている。言い換えると、現実世界における物理的な重力を無重力化する代わりに、遊戯者が制御可能な架空の重力(「仮想重力」と呼ぶ)を発生させるようにしている。なお、本発明で言う「物理的な重力」とは、3次元の仮想空間内において現実世界と同様の方向に働く重力のことを意味する。一方、本発明で言う「仮想重力」とは、遊戯者が操作可能な重力のことを指し、詳しくは、特殊モードにおいて操作コントローラ2の操作によって指定された方向に物理的な重力の方向を変えた際に、変えた方向に作用する重力のことであり、遊戯者が操作可能な重力のことを意味する。以下、説明の便宜上、両者の意味が混同しそうな場合を除いて「仮想重力」も「重力」という用語を用いて説明する。
【0044】
以下、重力の操作が可能なモードを「特殊モード」と定義し、特殊モードでの重力の操作(物理的な重力の方向変更操作,仮想重力エネルギーのチャージ操作,仮想重力エネルギーの開放操作など)を「重力コントロール」と定義して説明する。
【0045】
重力コントロールとは、移動体60の周囲の物理的な重力を吸収する形で仮想重力をチャージすることにより無重力状態を発生させ、チャージした重力(仮想重力のエネルギー)を指定した方向に開放することにより、その方向に移動体60や周囲のオブジェクトを落下(重力という名前の速度を与える)させるアクションのことを言う。遊戯者の操作としては、例えば、特定の操作ボタン24の押圧操作によって特殊モードの発動(重力コントロールの発動)を指示し、アナログジョイスティック23の傾動操作(又は方向キー25の操作)によって重力の方向を指示する。チャージした重力の開放指示は、特定の操作ボタン24の押圧操作によって行う。その重力の開放によって重力が当該方向に射出される。重力によって移動体60に与える速度は、本実施の形態では無重力状態の継続時間(つまり重力のチャージ量)によって異なり、重力のチャージ量が多いほど移動体60の速度が速くなるように、重力のチャージ量に応じて重力エネルギーを速度に変換し、移動体60に当該速度を付加する形態としている。
【0046】
本発明に係るレーシングゲームにおいては、上述のような重力の操作によって、コース短縮制御ステップにおいては、レース中にコースが短縮するようにコース形状を変形させたり、新しいパスを出現させたりするようにしている。また、特殊パス制御ステップにおいては、現実世界では重力の作用によって物理的に不可能な走行面を有するトンネル天井部などの特殊パスでの移動体60の走行を可能としている。
【0047】
次に、特殊モード時に発生する重力の作用範囲について、図6を参照して説明する。
【0048】
ゲームプログラムに従って動作するCPU11(以下「ゲーム処理手段11」と呼ぶ)は、特殊モードが発動されると、移動体60を中心とした周囲の3次元空間を重力Gが作用する範囲として設定する。例えば、図6において、移動体60が1.5m程度とすると、その位置を中心とした半径R=最大で20m程度の球状空間の内部を特殊重力空間GS(重力Gの作用範囲)として設定する。
【0049】
ゲーム処理手段11では、特殊モードが発動されてから重力の開放指示がされるまでの間、時間の経過に応じて、特殊重力空間GS内の重力を無重力化すると共に、重力エネルギーの量を加算し、その加算値を重力のチャージ量としてRAM3に記憶する。そして、操作コントローラからの重力の開放指令を入力した時点で、操作コントローラの操作によって指定された方向に重力Gを作用させる。ゲーム処理手段11は、重力Gをその特殊重力空間GS内に存在する他のオブジェクト80(重力の影響有りの属性を有するオブジェクト)に対しても同様に作用させ、重力Gの方向と大きさを示す重力情報に基づいて、オブジェクト80の動きを制御するようにしても良い。例えば、オブジェクト80が、コース50に設定されている特殊パスの経路を使用可能にするためのオブジェクト(隠し経路の扉など)であれば、そのオブジェクトの属性情報に応じて、オブジェクト80を重力Gの方向に飛ばしたり、破壊して消失させたり、隠し経路の扉(通常時の重力方向では回動しないが所定方向の力で回動する扉)を開口させたりするようにしても良い。
【0050】
移動体60のオブジェクトに対しては、重力という名前の速度に換算し、その速度(又はその速度とその時点の走行速度との加算値)で移動体60を走行させることによって瞬間的に加速させる。あるいは、図6中に示すように、特殊モード発動時の走行速度ベクトルA1と重力速度ベクトルGとを合成し、合成後の速度ベクトルA2の情報に基づいて、移動体60の移動方向と速度を決定するようにしても良い。
【0051】
また、周囲のエネルギーを吸収して無重力化させている過程では、特殊重力空間GS内に存在する他のオブジェクト80が浮遊したり、上記重力の影響とは逆に、無重力の影響によってオブジェクト80を破壊して消失させたり、隠し経路の扉を開口させたり、壁を消失させて新しいルートの通常パス若しくは特殊パスを出現させたりするなど、無重力の影響によって様々な事象を発生させる形態とするのが好ましい。
【0052】
本実施の形態においては、重力エネルギーの解放時には前述のような他のオブジェクト80の動きを制御せずに、無重力状態を発生時にその影響を他のオブジェクト80に与えることによって、上記のような様々な事象を発生させる形態としている。
【0053】
なお、本実施の形態においては、特殊重力空間の範囲は予め設定された範囲としているが、仮想乗物62の種類(及びカスタマイズ用のパーツの種類)や、仮想乗物62に乗るキャラクタ61の種類に応じて、ゲーム処理手段11が可変する形態としても良い。
【0054】
次に、本発明に係るゲーム装置の動作例を説明する。先ず、本発明に係るレーシングゲームの全体の流れを図7のフローチャートを用いて説明する。
【0055】
遊戯者のスタートボタン21の押圧操作によりゲームが開始されると、ゲーム処理手段11は、選択可能なコースや移動体60(キャラクタ61及び仮想乗物62)を示すメニュー画面をディスプレイ31に表示し、メニュー画面上でのクリック操作等によってコースや移動体60を遊戯者に選択させる(ステップS1)。
【0056】
続いて、ゲーム処理手段11は、遊戯者によって選択されたコースのスタート位置に、当該レースに参加する移動体60を含む各移動体オブジェクトを設定し、各移動体を仮想カメラから捉えた画像の画像情報を生成してディスプレイ31に表示すると共に、例えばカウントダウン表示が0になったタイミングでレースを開始する(ステップS2)。レースが開始されると、ゲーム処理手段11は、コース50の通常パスNPを走行する各移動体(各遊戯者又はCPU11が操作する移動体)の3次元仮想空間内の現在位置及び方向を逐次算出し、移動体の現在位置等の記憶情報を更新する(ステップS3)。そして、仮想カメラから捉えた移動体60のオブジェクトと地形や構造物などの背景オブジェクトとを合成処理した現在の走行状況を表す画像情報を逐次生成してグラフィックメモリ14bに格納し、図5に例示したようなゲーム画像を、画像処理回路14を介してディスプレイ31に表示させる(ステップS4)。
【0057】
続いて、ゲーム処理手段11は、移動体60の通過による特定アイテム獲得時のポイント加算処理など、移動体60の動作に応じた所定の処理を実行すると共に(ステップS5)、各移動体60が、特殊モードを発動するための条件(「第1の条件」とする)を満たしているか否かを判定する。ここで言う「第1の条件」とは、例えば、移動体60を走行させるためのエネルギーがあること、遊戯者が操作する移動体60がゴール地点に到達していないこと、移動体60がスピンしている状態でないこと、特定の演出画像を表示するために発動を制限していないこと、移動体60がコースを逆走していないこと、発動のためのアイテムを所有していること等のいずれか1つ以上である。言い換えると、本実施の形態においては、特殊モードの発動は、移動体60を走行させるためのエネルギーさえあれば、基本的にはゲーム中のどのタイミングでも行えるようにしている。なお、発動条件(and条件)として、ステップS5で更新したポイント値と予め定められた設定値とを比較し、ポイント値が設定値を超えていることを付加する形態としても良い(ステップS6)。
【0058】
続いて、ゲーム処理手段11は、上記第1の条件を満たしている移動体60を操作する遊戯者による特殊モードの発動開始指示(操作コントローラ2からの特殊モード発動指令の入力)の有無を監視し(ステップS7)、特殊モードの発動指令が入力されたと判定した場合は、操作コントローラ2からの重力の操作情報の入力を受付け、重力コントロールの処理を実行する(ステップS100)。なお、この重力コントロールの処理については、具体的な例を示して後述する。
【0059】
上記ステップS100における重力コントロールの処理が終了すると、ゲーム処理手段11は、全ての移動体がゴール位置に到達したか否かを判定し(ステップS8)、到達していないと判定した場合は、ステップS3に移行して処理を繰り返し、ステップS8において全ての移動体がゴール位置に到達したと判定した場合は、ゲームの終了処理を行って当該コースでのレーシングゲームを終了する。
【0060】
次に、上記ステップS100における重力コントロールの処理について具体例を示して説明する。
【0061】
先ず、コース短縮制御ステップにおける処理について説明する。なお、ここでは、上記ステップS100の処理を含めて、コース短縮制御に係る全体の処理について説明する。
【0062】
ゲーム処理手段11によって実行されるコース短縮制御ステップにおいては、前述のように、特殊モードにおいて発生させた無重力の影響によってコースの一部(例えば路面や壁の一部など)を破壊して消失させる事象を発生させるようにしている。そして、その事象に応じて、例えば、コース上の移動体の走行距離が短縮する形でコース長が縮小する事象や、新しいルートが出現する事象を発生させるようにしている。
【0063】
以下、コース短縮制御ステップにおける処理の詳細を図8のフローチャートの流れに沿って説明する。
【0064】
コース短縮制御ステップでは、先ず、仮想空間内の移動体の走行経路となるパスの一部を複数部品で構成し、そのパスを含むコースを仮想空間内に設定する。なお、ここで言う「コース」とは、走向路のことを意味し、「パス」とは、コース内の走行経路(例えばコースが分離帯で仕切られた各々の走向路)のことを意味しており、コースの短縮処理においては「コース」と「パス」は同義語である。
【0065】
コースを形成するための部品としては、例えば、図9(A)〜(C)に示すように、立方体状の部品51a(以下「単体ブロック」と呼ぶ)、直方体状の鉄骨用パーツ51b(以下「単体鉄骨」と呼ぶ)、直方体状のガードレール用パーツ51c(以下「単体ガードレール」と呼ぶ)がある。コースの構成要素として使用されるこれらの部品51は、本例では3次元ポリゴンモデルから成るオブジェクトで作成される。そして、同一種類又は異なる種類の部品51を組み合わせることによってコースが形成され、図3に例示したようなコース50が仮想空間内に設定する。
【0066】
なお、コース短縮制御ステップの対象となるコースの部品オブジェクト(後述の重力の影響に係る属性を有するオブジェクト)は、本実施の形態では、ブロック形状の部品51を例として説明するが、ブロック形状に限るものではない。例えば、ビーム状のパスとする場合、ビーム状のオブジェクトを連結することにより(又は1つのビーム状のオブジェクトにより)パスが形成される。その場合、オブジェクトに接触等の条件を満たすことでビーム状のルートがなくなるため、ごく自然にコース長が縮小する事象を発生させることができる。
【0067】
ここで、部品51の組み合わせによって形成されるコースについて、具体例を示して説明する。
【0068】
図10(A)及び(B)は、部品51の組み合わせによって形成したコースの一部を示しており、図10(A)は、コースの一部を構成する直線状走行路52の一例を示す平面図、図10(B)は、同図(A)の直線状走行路52に設置されるトンネル上の屋根53を示す斜視図である。図10(A)に示される直線状走行路52は、単体ブロック51aと単体鉄骨51bとの組み合わせによって直線状の路面を形成し、単体ガードレール51cの組み合わせによって形成したガードレールを路面の片側に設けた構成としている。他方、図10(B)に示される屋根53は、単体ブロック51aを組み合わせてドーム型に形成した屋根(以下「ドーム型屋根」と呼ぶ)である。
【0069】
図11は、仮想空間内に設定されるコースの一例を示す平面図であり、上記直線状走行路52とドーム型屋根53とを用いて形成したコースを示している。図11に示されるコース50Aは、所定の間隔Wを空けて2本の直線状走行路52(例えば長さ750m、幅36mを想定した直線状走行路)を平行に配置し、その両端にガードレール用パーツ51cを配置した構成としている。また、それぞれの直線状走行路52にはドーム型屋根53、53Aが配設されている。このコース50Aは、各移動体を周回させて競争させる形態のレーシングゲームに使用されるコースであり、以降、コース50Aの例を用いて説明する。
【0070】
コース短縮制御ステップでは、上述のようにして形成したコース50Aを仮想空間内に設定する(ステップS11)。そして、コース50Aを構成する各部品オブジェクトの属性情報を設定して記憶媒体に格納しておき、ゲームの開始時に読み出してRAM13に記憶する。ここで、コース短縮制御ステップにおいて使用する主要な属性情報について説明する。本実施の形態においては、無重力の影響によってコースの一部を破壊して消失させる事象を発生させるために、コースを構成する部品オブジェクトの属性情報として例えば次のような情報が設定される。
【0071】
図11中の「1」から「8」で示す属性情報は、その数値をNとして、N週目以降に無重力の影響を受けるブロックであり、影響を受けた場合は飛び散り、そのブロックの路面部分が消失するブロックであることを意味している。その他のブロックは、重力の影響を受けるブロックであることを意味している。なお、ドーム型屋根53Aは、空間部54側の壁が単体ガードレールを組み合わせた壁オブジェクトで構成されている。例えばその壁オブジェクトの属性情報を「無重力の影響有り」、「特殊パスを出現させる」と設定しておくことで、無重力の影響により壁(ガードレールの壁や路肩などの特定の壁)が破壊されて消失し、新しいルート(例えば2本の直線状走行路52の間を通る特殊パスを出現させる形態としても良いし、予め設定されている特殊パスが表示される形態としても良い。コース短縮制御ステップでは、上記のような属性情報を設定して記憶媒体に格納しておく(ステップS12)。
【0072】
次に、コースの短縮制御に係るゲーム中の処理について説明する。
【0073】
その説明に先立ち、コース50Aを走行する移動体の動作について説明する。このコース50Aにおいては、移動体は、図11中のスタート地点STからスタートして、図面において上の直線状走行路52を右側に向かって走行し、その直線状走行路52の右端部(矢印R1の部分)に来たら、重力コントロール(図中の矢印G1の方向への重力重操作:詳しくは、後述の特殊パス制御ステップの処理で説明する操作)を用いて、図面において下の直線状走行路52に移動する。その後、移動体は下の直線状走行路52を左側に向かって走行し、その直線状走行路52の左端部(矢印R2の部分)に来たら、重力コントロール(矢印G2の方向への重力操作)を用いて、図面において上の直線状走行路52に戻り、同様の走行を繰り返す。その際、スタート地点STに到達する都度、ゲーム処理手段11によって周回が判定される。
【0074】
本実施の形態においては、上記の重力コントロールを行った際に、数値の書かれている単体ブロック51aが無重力の影響を受けて飛び散り、周回を重ねる毎にコース自体が短くなっていくように、ゲーム処理手段11(コース短縮制御ステップを実行するCPU11)が自動的にコース50を短縮させるようにしている。以下、コースの短縮制御に係るゲーム中の処理について説明する。
【0075】
ゲーム処理手段11は、コース50の通常パスNPを走行する各移動体(各遊戯者又はCPU11が操作する移動体)の3次元仮想空間内の現在位置及び方向を逐次算出し、移動体の現在位置等の記憶情報を更新する(ステップS13)。
【0076】
そして、仮想カメラから捉えた移動体60のオブジェクトと地形や構造物などの背景オブジェクトとを合成処理した現在の走行状況を表す画像情報を逐次生成してグラフィックメモリ14bに格納し、図5に例示したようなゲーム画像を、画像処理回路14を介してディスプレイ31に表示させる(ステップS14)。
【0077】
続いて、ゲーム処理手段11は、移動体60の通過による特定アイテム獲得時のポイント加算処理など、移動体60の動作に応じた所定の処理を実行すると共に、各移動体60が、特殊モードを発動するための条件(第1の条件)を満たしているか否かを判定する。ここで言う「第1の条件」は、前記ステップS5で説明した第1の条件であり、説明を省略する(ステップS15)。続いて、ゲーム処理手段11は、第1の条件を満たしている移動体60を操作する遊戯者による特殊モードの発動開始指示(操作コントローラ2からの特殊モード発動指令の入力)の有無を監視し、特殊モードの発動指令が入力されたと判定した場合は、特殊モードを発動中か否かを判定する(ステップS16)。
【0078】
そして、特殊モードを発動中でないと判定した場合は、ステップS13に戻って処理を繰り返し、特殊モードを発動中と判定したのであれば、重力の開放指示を示す情報が入力されるまでの間、以降のステップS17からステップS23の処理を実行する。
【0079】
特殊モードが発動されてから重力の開放指示がされるまでの間は、ゲーム処理手段11は、図6に示した特殊重力空間GS内(本例では移動体60を中心とした周囲の仮想空間内)の重力エネルギーが吸収される形で、時間の経過に応じて特殊重力空間GS内の重力を無重力化すると共に、重力エネルギーの量を加算し、その加算値を重力のチャージ量としてRAM3に記憶する(ステップS17)。
【0080】
ゲーム処理手段11は、上記ステップS17の処理によって無重力の状態を発生させると共に、特殊重力空間GS内に存在する部品オブジェクト(各部品51のオブジェクト)を対象として、その部品オブジェクトの属性情報を記憶手段(RAM13)から読み出し(ステップS18)。各部品51の属性情報に基づいて、「無重力の影響有り」の属性が設定されている部品51が存在するか否かを判定する(ステップS19)。
【0081】
上記ステップS19において、「無重力の影響有り」の属性が設定されている部品51が特殊重力空間GS内に存在すると判定した場合は、ゲーム処理手段11は、当該部品51が砕けて飛び散る様子を示す演出画像の画像情報を生成し、その演出画像をディスプレイ31に表示する(ステップS20)。
【0082】
なお、コース50Aの例では、図11中の「1」から「8」の部品51が走行路の路面であり、上記ステップS20において、「無重力の影響有り」の属性であれば、その部品51が必ず破壊される訳ではない。本例では、周回数Nの属性情報に基づき、周回数に応じて破壊される形態としている。また、上記ステップS20において、単体ガードレール51cの属性情報として「無重力の影響有り」の属性が設定されている場合は、その単体ガードレール51cの部分が破壊される様子を示す演出画像が表示される。なお、部品51が破壊される条件は、特殊重力空間GS内に存在する部品51の属性が「無重力の影響有り」であることの他に、上記のように周回数の条件(ゲームの進行状況に応じた条件)を追加するなど、1つ以上の条件を追加するようにして良い。
【0083】
ゲーム処理手段11は、ステップS20の処理を実行すると共に、コースを短縮する事象を発生させるか否かを判定する(ステップS21)。
【0084】
なお、コースを短縮する事象を発生させる形態としては、例えば、特殊モードが発動されて無重力の影響を受けた走行経路部において、その走行経路部の部品51の破壊(路面の消失)が一つの部品51だけの場合でも発生させる形態、コースの幅方向全域に亘って部品51が破壊された場合(コースが切断されるような事態が生じた場合)に発生させる形態、所定数の部品51が破壊された場合に発生させる形態がある。これらの中のいずれの形態としても良く、また、レースの状況に応じて形態を可変するようにしても良い。
【0085】
上記ステップS21において、コースを短縮する事象を発生させると判定した場合は、ゲーム処理手段11は、無重力の影響によって破壊された走行経路部の部品51を削除し、レースを中断することなく、走行方向のコース長を短縮したコースを自動的に再設定する。言い換えると、コース上の移動体の走行距離が短縮する形でコース長を縮小したコースを形成し、走行経路部が破壊される直前のコースを、縮小したコースに自動的に切換える処理を実行する。
【0086】
その際、本実施の形態では、例えば図12に示すように、特殊モードを発動させた移動体60の後方側走行経路部50Sの部品オブジェクトを削除し、図12中のサイズL分、コースを短縮させるようにしている。この図12の例では、移動体60の後方の部分(消失してない)を図中の矢印Mの方向にシフトし、コースの切断部を連結させる形態でコースが形成される形となる。その際、傾斜した走行経路部において短縮させる場合は、傾斜角度を変化させるようにしても良い。また、カーブの走行経路部において短縮させる場合は、曲率を変化させるようにしても良い。また、上昇又は加工する走行経路部において短縮させる場合は、走向方向の路面の角度や曲率を変化させるようにしても良い。なお、短縮させたコースに切換え過程において、走行経路部が破壊された部分に位置する移動体は、その破壊の影響を受けるはなく、通常に走向させるようにしている(ステップS22)。
【0087】
続いて、ゲーム処理手段11は、短縮したコースを仮想空間内に再設定し、ステップS13に戻り、レースを継続させる(ステップS23)。
【0088】
本実施の形態においては、上述のように、仮想空間ならではの特殊操作(重力操作)によって、現実世界ではありえないコースの縮小を発生させるようにしている。そのため、意外性に富み、仮想空間内独特のレースを展開させることができる。また、各移動体のコース上の走行距離が一律に短縮する形態となるので、遊戯者に違和感や不公平感を感じさせることない。
【0089】
次に、特殊パス制御ステップにおける処理について説明する。
【0090】
先ず、特殊モードにおいて使用可能となる特殊パスについて説明する。
【0091】
図13は、特殊パスが設定されたコース50の例を示しており、本例では、通常パスNPから分岐する2つの特殊パスSPが設定されている。特殊パスSPとしては、構造物(ガードレールや建物など)の壁や天井などがあるが、特殊パスSPの種類については具体例を示して後述する。このようなコース50において、遊戯者は、例えば、特殊パスSPへの分岐点SPaに移動体が到達する直前で特殊モードを発動し、周囲の重力をチャージして無重力化すると共に、重力の方向を特殊パスSPの方向に変化させることによって、移動体60を特殊パスSP側に移動させる。その際、移動体60の走行経路が分岐点SPaを起点として特殊パスSP側に変更され、特殊パスSPのルートを移動体60が走行することになる。そして、合流点SPbで通常パスNPに合流し、移動体60は元の通常パスNPを走行することになる。
【0092】
壁や天井等の地形(特殊パスSPの走行路)から、グローバル軸上の地上(通常パスNPへの合流点SPb)に戻す場合の処理形態としては、例えば次のような形態がある。
(T1)地上から移動体60を離す仕掛け(ジャンプ台等)を用意し、強制的にその地形から落下させることで地上に戻す処理形態。
(T2)地形の角度を徐々に変化させ、地続きでグローバル軸上の高さ方向を示すY軸の−方向に戻す処理形態。
(T3)壁や天井に移る際と同様に、Gコントロールを用いて、遊戯者の重力操作に応じて地上に戻す処理形態。
【0093】
上記(T1)及び(T2)の処理形態では、特殊モードの解除は、特殊パスNPの終端に設定された合流点SPbで自動的に行われるが、例えば(T3)の処理形態で遊戯者の操作で特殊モードの発動を解除(終了)した場合、あるいは、合流点SPbの手前で例えば重力のチャージ量を全て消費した場合は、特殊パスの途上で特殊モードが解除され、元の重力方向に重力が戻ることになる。その場合、特殊モードの発動を終了した時点で合流点が設定され、特殊パスを走行中の移動体はその合流点で通常パスに合流することになる。
【0094】
なお、本実施の形態においては、特殊モードは、重力の操作指示がされたことのみを条件として発動できる形態としているが、特定アイテムの獲得によって得られるポイント、走行時間、周回数、走行順位、移動体間の距離などを要素として、特定の条件を満たしたときに発動可能とする形態としても良い。また、特殊パスSPは、重力の操作方向が正しければ常に利用できるパスの他に、特定のスイッチオブジェクトを作動しないと利用できないパスを設定するようにしても良い。例えば、重力コントロールによって通常では走行できないルートにアクセスが可能となった場合に、通常では走行できないルートのみに設置された一般ルートを走行している後続の移動体(或いは遊戯者が操作する移動体自体、或いは遊戯者が操作する移動体より先行する移動体)に対して影響を及ぼすことのできるスイッチを配置させることが可能である。このようなスイッチを配置しておくことで、単に、通常走行できないルートを走らせるだけではなく、通常走行できないルートに設けられたスイッチを積極的に探索することになり、より優位にゲームを進めさせることが可能となる。例えば、先行する遊戯者の移動体がスイッチを踏むことにより隠しルートが露出され、後続する遊戯者の移動体も有利に進める状況が発生する。このような事象は、移動体がスイッチを踏むことにより発生させる形態と、特殊モードにおける無重力(−G)の作用、或いは、重力方向の操作による重力(+G)の作用によってスイッチを作動させることにより発生させる形態とがある。
【0095】
また、特殊パスSPとしては、走行経路の両端に分岐点SPaと合流点SPbとが固定して設定されているものと、移動体60が通常パスNPから特殊パスSPへ移動する際に分岐点SPaが設定され、移動体60が特殊パスSPから通常パスNPへ戻る際に合流点SPbが設定される形態がある。例えば、隠し扉の開放により出現する特殊パスSPへの分岐点SPaは固定的なものであるが、無重力化した状態で空間を移動する空間中の特殊パスSPの場合は、その特殊パスSPへの分岐点SPaは、特殊モードの発動時点で設定される可変的なものである。また、合流点SPbは、前述のように、例えば遊戯者の指示によって特殊モードの発動が終了となったときは、自動的に設定される可変的なものである。その場合には、例えば移動体の中心を通る重力方向の直線と通常パスの路面との交点を合流点として設定する。
【0096】
次に、特殊モードの発動時における重力の作用について、特殊パスの具体例を示して説明する。
【0097】
図14(A)は、移動体60が通常パスNPを進行方向Aに走行している状態を示している。図14(A)において、通常パスNPの路面を水平面と仮定すると、通常パスNPではその路面に対して垂直な重力Gが作用している。本実施の形態においては、レーシングゲームに用いるコースとして、このような通常パスNPの他に、特殊モードの発動時にのみ利用可能な図14(B)〜(D)に示すような特殊パスSP(SP1〜SP3)を予め設定若しくはレース中に動的に設定し、重力Gを操作することによって、通常は重力の作用によって走行できない特殊パスSPを走行可能としている。図14(B)の例は、壁面を特殊パスSP1として設定した例であり、図14(C)の例は、天井面をパスSP2として設定した例である。図14(D)に示される特殊パスSP3は、目視では見えないパスであり、遊戯者による重力制御によって形成される地上のパス(地上の空間をG方向に落下(G方向に引っ張る力によって空間内を移動)するパス)である。詳しくは、特殊パスSP3は、新しく指定されたG方向を重力方向としてその方向に移動体が引っ張られ、その引力又は引力と特殊パスSPに移る時点の移動体の慣性力とによって空間内を移動体が進行する状態となるときの進行経路である。
【0098】
例えば、図14(D)中の通常コースNPの直角コーナ直前で遊戯者が特殊モードを発動させると、通常時の重力が無重力化され、移動体60は路面から浮上する。その状態で図14(D)中の矢印G方向へ重力を発生させることで、重力によるG方向への自由落下による特殊パスSP3が形成され、その特殊パスSP3を移動体60が落下(空間を走行)することになる。
【0099】
このように、本実施の形態においては、現実世界ではありえない重力の制御を可能としている。そして、遊戯者(若しくはCPU)が重力の方向を操作することによって、非現実で意外性のある天井や壁面などの特殊パスを使用した走行を可能としている。例えば、遊戯者は、その特殊パスと重力エネルギーを利用することで、先行する他の移動体を追い越したり、周回遅れの移動体に邪魔されずに走行したり、急カーブや直角コーナをドリフト走行や限界のグリップ走行と比較して高速で走行したりすることが可能となる。
【0100】
次に、前記ステップS100における重力コントロールの処理について、図15のフローチャートの流れに沿って説明する。
【0101】
ゲーム処理手段11は、特殊モードの発動条件を満たしていると判定した場合は、先ず、重力を無重力化した空間の画像演出表現を開始する。以下、図16の模式図と、仮想カメラの動作例を示す図17を参照して説明する。図16は、例えば、図14(D)に例示したような急カーブを有する通常パスNPにおいて特殊モードが発動された場合の重力コントロールのイメージを示す模式図であり、図17は、そのときの仮想カメラの動作例を示す模式図である。そして、図17中のPa,Pb,Pc,Pdは、図16中の移動体60a,60b,60c,60dの位置を示している。
【0102】
ゲーム処理手段11は、操作ボタン24aの押圧操作の情報入力によって重力コントロール(Gコントロール)が発動されたことを検出すると、重力を無重力化した空間の画像演出表現を開始し(ステップS101)、ゲーム処理手段11によるコントロールの対象を移動体60(以下、遊戯者が操作する移動体を「プレイヤキャラクタ」と呼ぶ)から仮想カメラ70に移行する。詳しくは、通常時はプレイヤキャラクタ60の姿勢(進行方向)を操作するようにしているが、Gコントロール時はプレイヤキャラクタ60を中心に仮想カメラ70の位置を操作する(ステップS102)。
【0103】
ゲーム処理手段11は、無重力化する前のプレイヤキャラクタ60の処理として、プレイヤキャラクタ60の速度を所定の速度(例えば時速50km程度)まで徐々に速度を落とす処理を実行すると共に、その低速化する速度に比例して、操作している仮想カメラ70の動き(仮想カメラ70のロット変化)を高速化する処理を実行する。ここで言う仮想カメラ70の「ロット」とは、ROTATE(回転)を指しており、本実施の形態では、仮想カメラ70の注視点が方向キーの指定している方向に、プレイヤキャラクタ60を原点として円周移動する動きを指している。この円周移動は、初速と後半速度の段階変化をもっており、ゲーム処理手段11では、後半は加速度が増し若干早く移動するように、仮想カメラ70のカメラワークを制御している。
【0104】
図16の画像例では、図16中のプレイヤキャラクタ60aの位置からプレイヤキャラクタ60bの位置へとスピードダウンしながら移動させる。そのプレイヤキャラクタの移動動作に応じて、仮想カメラ70の位置を図17中のPaの位置からPdの位置へと移動させると共に、図17中の矢印に示すように、仮想カメラ70の方向を円周移動させる。その間、重力コントロール(特殊モード)の発動時点から周囲の重力をチャージする処理を実行し、重力のチャージ量の記憶値を逐次加算する。また、プレイヤキャラクタ60aからプレイヤキャラクタ60bの位置へとスピードダウンしながらの移動量を、順位に応じて変動させてもよい。この場合、遊戯者に気づかれることなく、各移動体同士の距離が短くなるため、より緊迫したレース展開をすることが可能となる。
【0105】
ゲーム処理手段11は、上記処理を実行すると共に、一定領域内(前述の特殊重力空間GS内)のオブジェクトを検出し(ステップS103)、検出オブジェクトを無重力化する処理を実行する。その際、背景オブジェクトを含む特殊重力空間GS内の各オブジェクトを対象として、各オブジェクトのポリゴンの頂点座標を変更して形状を変化させる等の画像処理によって、重力空間から無重力空間への遷移過程における重力の変化を空間(時空構造)の歪みとして表現するようにしている。画像上では例えば空気の流れが変わった様なイメージで表現する。図16の画像例では、歪んだ空間内でプレイヤキャラクタの姿勢と地面からの高さを徐々に変化させながら、図16中のプレイヤキャラクタ60bの状態からプレイヤキャラクタ60cの状態へと遷移させるようにしている。そのときの特殊重力空間GS内のオブジェクト(プレイヤキャラクタと検出オブジェクト)に対しては、一定範囲内の高さまで上昇する力を付加して地面から浮上させる処理(当該オブジェクトのポジションをY軸上のある程度の範囲に移動させる処理)を実行する。なお、その際の浮上範囲は、本実施の形態では固定ではなく、乱数値を持たせて多少変動させるようにしている。前述のコース短縮制御ステップにおいては、無重力の影響を受けたブロックが空中に飛び散って行く様子を示す画像を表示する。そして、コースの短縮処理においては、短縮後のコースが再設定され、変形されたコースマップ(図5中のコースマップG2)が表示される(ステップS104)。
【0106】
遊戯者は、このような無重力空間の演出画像を見ながら、図17中に示すように、アナログジョイスティック23の傾動操作により重力の方向を指定すると共に(ステップS105)、重力コントロールの解除のタイミングを図って重力コントロールの解除指示(本例ではチャージした重力の開放指示)を行う。
【0107】
ゲーム処理手段11は、重力コントロールの解除指示を入力するまでの間、図16中のプレイヤキャラクタ60dに示すように、例えば、キャラクタの顔部は進行方向、腹部はねじれて仮想カメラ70の方向に向けると言うように、仮想乗物に乗ったキャラクタの頭部、腹部の動きをそれぞれ仮想カメラ70のYロット(rot)を遊戯者の操作やカメラ位置に合わせて制御する。さらに、前述のように、プレイヤキャラクタ60の移動動作に応じて、仮想カメラ70の位置を移動させると共に、プレイヤキャラクタ60を原点として仮想カメラ70の注視点を円周移動させ、重力を開放する方向を見出す。
【0108】
ゲーム処理手段11は、重力コントロールの解除指示を検出すると、無重力空間の画像演出表現の処理を終了し(ステップS106)、コントロールの対象を仮想カメラ70からプレイヤキャラクタ60に移行する(ステップS107)。そして、アナログジョイスティック23の傾動操作により指定された重力(G)の方向へ、プレイヤキャラクタ60及び特殊重力空間GS内の検出オブジェクトを射出させる。その際の射出方向(チャージした重力を開放する方向)は遊戯者の指定した方向であり、射出速度は、例えば前述のように無重力状態の継続時間(重力コントロールの発動指示の時点から解除指示の時点までの重力のチャージ量)に応じた速度(最高速度は例えば時速200km)である。プレイヤキャラクタ60を射出する際には、ゲーム処理手段11は、仮想カメラ70の画角を広域化し、上記速度で瞬間的に加速するプレイヤキャラクタ60をその画角で捉えて撮像し、図16中のプレイヤキャラクタ60eに示すように、例えばリング状の効果線をエフェクト画像としてプレイヤキャラクタ60eの周りに描画すると共に、画面効果としてブラー(blur)を施した画像を表示するようにしている。このような画像処理によって、重力エネルギーが放出されてプレイヤキャラクタ60eが瞬間的に加速する状態を表現する(ステップS108)。
【0109】
なお、上述のような重力コントロールは、好ましい実施の形態では、以下の2種類のパターンPT1,PT2を用意している。
(PT1)図15の画像例のように、通常走行時に仮想重力のエネルギーを指定方向へ開放すると、その重力コントロールによってプレイヤキャラクタ60が急なカーブ(コーナ)を曲がることを目的とした重力変化を起こすパターン。
(PT2)コース内に設置されたキッカ等を利用してトリック発動後に仮想重力のエネルギーを指定方向へ開放すると、その重力コントロールによって、特殊パスとして設定されている壁や天井といった3次元ルートを選択することを目的とした重力変化を起こすパターン。
【0110】
上記2つのパターンにおいては、ゲーム処理手段11は、プレイヤキャラクタ60自身の挙動或いは周囲のオブジェクトに与える影響には全く差別化を行っていないが、パターンPT2の場合のみ、プレイヤキャラクタ60を射出した後において仮想3次元空間上に設定されている地上以外に設定されている地上パス(つまり壁や天井といった特殊パス)を検知するようにしている。処理パターンを分けているのは、3次元ルートに移る際のルールを遊戯者に明確に伝えることと、及び、ゲーム処理手段11によるパス検知の処理負荷(頻度)を軽減化することを目的としている。なお、上記PT2の処理パターンの重力コントロールのみとしたシステムとしても良い。
【0111】
また、他の実施形態としては、上記パターンPT2において通常パスから特殊パスへ移行する際に、キッカ等を利用せずに、無重力で浮上した状態で仮想重力のエネルギーを特殊パスの方向へ向けて開放し、それによって特殊パスへ移行させる形態としても良い。その場合においても同様の画像処理をして、通常の重力空間から無重力空間へ遷移する過程での各オブジェクトの状態変化や、重力が開放されて特殊パス上を加速するプレイヤキャラクタ60の様子を表示するようにしても良い。例えば、図14(B)に例示した壁面の特殊パスSP1の場合は、図18に示すように、プレイヤキャラクタ60の様子を示す画像60a(図18の例ではキッカを利用して壁面の特殊パスSP1へジャンプして移動した画像例)において、無重力により浮遊した状態を示す画像を表示し、仮想重力のエネルギーを壁面に向けて開放されると、プレイヤキャラクタ60aを壁面に移動させた状態の画像を表示し、その後、壁面に移動した状態で特殊パスSP1の進行方向に瞬間的に加速する様子を示す画像60bを経由して画像60cへと変化させて表示するようにしても良い。
【0112】
前記ステップS108の処理に続いて、ゲーム処理手段11は、特殊パスを走向中のプレイヤキャラクタ60について、その特殊パスの走行終了の条件(「第2の条件」とする)を満たしたか否かを判定する。ここで言う「第2の条件」とは、例えば、遊戯者による特殊モードの発動終了指示(操作コントローラ2からの特殊モード発動終了指令の入力)を受付けたこと、あるいは特殊パスの終了地点(通常パスとの合流点)にプレイヤキャラクタ60が到達したことである(ステップS109)。
【0113】
上記ステップS109において第2の条件を満たしていると判定した場合は、ゲーム処理手段11は、プレイヤキャラクタ60が特殊パス上を移動する状態(本例ではプレイヤキャラクタ60が空間中の特殊パスをG方向へ落下する状態)の画像を表示すると共に、プレイヤキャラクタ60eの着地位置(特殊パスから通常パスへの合流点)となる地形の重力方向(XYZ軸+/−方向)を確認し(ステップS110)、プレイヤキャラクタ60の姿勢をG方向(射出方向)から通常の重力方向へと変化させながら、プレイヤキャラクタ60を着地位置へと着地させ、通常パスへと合流させる(ステップS111)。そして、ゲーム処理手段11は、特殊モードを解除して重力コントロールの処理を終了する。
【0114】
なお、上記ステップS110、S111においてプレイヤキャラクタ60を地上に戻す処理形態としては、前述のように、(T1)強制的に着地位置へ落下させる形態、(T2)地形の角度を徐々に変化させ、地続きで地上に戻す形態、(T3)特殊パスに移る際と同様に、遊戯者の重力操作に応じて地上に戻す形態がある。上記(T3)の形態の場合は、遊戯者は、地形側に重力方向を指定しており、遊戯者は、特殊パス上を移動するプレイヤキャラクタ60eと前方の地形とを示す画像を見て射出方向にある地形の重力方向を予測し、操作コントローラ2を操作してキャラクタ61の姿勢を変化させながらプレイヤキャラクタ60eを着地させ、通常パスへと合流させる。ゲーム処理手段11では、操作コントローラ2からの操作情報、通常パスの地形情報、及び移動体の位置情報に基づいて、特殊パス上を移動中のプレイヤキャラクタを通常パスへ合流させる処理を実行し、その演出画像の画像情報を生成してディスプレイ31に表示する。
【0115】
次に、特殊モードでの重力操作時の画像処理と音楽の変更処理について説明する。先ず、重力操作時の画像処理について、図19のフローチャートの流れに沿って説明する。
【0116】
ゲーム処理手段11は、全ての移動体60(単独走行のゲームではプレイヤキャラクタ60)がゴール位置に到達したか否かを判定することにより、ゲームが終了したか否かを判定し(ステップS31)、ゲームが終了したと判定した場合は、レーシングゲームの終了処理(プレイヤキャラクタ60の順位や遊戯者の操縦技術に関する評価値等の結果表示)を行って、当該コースでのゲームを終了する。
【0117】
ステップS11において、ゲームが終了していないと判定した場合は、画像情報生成手段が、現在のプレイヤキャラクタ60の位置情報や地形情報に基づいて画像情報を生成すると共に、生成した画像情報をグラフィックメモリ14bにリアルタイムに記録する(ステップS32)。そして、座標変換処理やレンダリング処理を実行した後のゲーム画像をディスプレイ31に表示させる。
【0118】
続いて、ゲーム処理手段11は、遊戯者の操作が特殊モードにおける重力操作か否かを判定し(ステップS33)、重力操作でない場合はステップS11に戻って処理を繰り返し、重力操作と判定した場合は、特殊重力空間内のオブジェクト(3次元ポリゴンモデル)の画像情報をフレームバッファに退避させ(ステップS34)、退避させた画像情報をテクスチャとして、画像情報生成手段によって当該オブジェクトの画像データを加工する。その際、例えば、3次元座標系において、歪みのない通常のオブジェクト(3次元ポリゴンモデル)の形状から、重力の変化に応じて歪みを施したオブジェクトの形状へと、モーフィング処理により徐々に変形させる画像処理を行うことにより、無重力化に伴うオブジェクトの状態変化や、重力方向の変化に伴うオブジェクトの状態変化を表現する。また、重力の開放指示により当該オブジェクトを重力方向へ射出する処理の際には、前記ステップS108で述べたように、テクスチャ画像にブラーを施したり、エフェクト画像を合成したりするなどの画像加工処理を行うことによって、重力が放出されて瞬間的に加速する状態などを表現する(ステップS35)。
【0119】
そして、歪みのない通常の形状から歪みを施した形状へとオブジェクトの形状を変形させながら、モーフィングした3次元ポリゴンモデルのテクスチャ画像をスクリーン座標系の大きさのモデルに貼付け(ステップS36)、特殊重力空間内の当該オブジェクトの画像と特殊重力空間外の画像とを合成した画像を表示し(ステップS37)、ステップS31に移行し、ステップS31においてゲーム終了と判定するまで画像処理を繰り返す。
【0120】
次に、特殊モードでの音楽の変更処理について、図20のフローチャートの流れに沿って説明する。
【0121】
ゲーム処理手段11は、ゲームが終了したか否かを判定し(ステップS41)、ゲームが終了していない場合は、音声情報生成手段によって生成された通常時の音声情報に基づいて、BGM等の音声データを音声処理回路15を介して生成し、通常時の音楽データによるサウンド出力を繰り返す(ステップS42)。上記ステップS42の処理中に重力操作が開始されたと判定した場合は、通常時の音楽データから、特殊モード時の音楽データ(例えば重力の変化や空間の歪みを表現する独特の効果音を有する音楽データ)に切換え(ステップS43、S44)、切換後の音楽データによるサウンド出力を繰り返す(ステップS45)。そして、重力操作が終了したと判定した時点で(ステップS46)、特殊モード時の音楽データから通常時の音楽データに切換え(ステップS47)、ステップS41に移行して処理を繰り返す。そして、ステップS41においてゲーム処理手段11がゲーム終了と判定した時点で、レース中の音声処理を終了する。なお、通常時の音楽データを複数用意しておき、重力操作がされるたびに、上記ステップS47において前の通常走行時とは別の音楽データへ切換るようにしても良い。
【0122】
なお、上述した実施の形態では、重力コントロール実施後の重力の効果は、移動体の属性に依存しない形態としているが、移動体の属性(仮想乗物に乗るキャラクタのタイプ、仮想乗物の種類、パーツの装着によるカスタマイズ後の仮想乗物の形態など)に応じて重力の効果に差を生じさせる形態としても良い。
【0123】
例えば、第1の例としては、コース短縮制御ステップにおいて、キャラクタのタイプに応じて、重力コントロール時に飛ばすことができる部品オブジェクトの量を変化させる形態とする。例えば、先頭を走るキャラクタがスピードタイプ、フライタイプであるよりも、パワータイプが先頭を走ったときの方が、飛ばされる部品オブジェクトの量が多くなるため、その分ルートも短くなりやすいなど、キャラクタのタイプに応じて、無重力の影響を及ぼす部品オブジェクトの量を変化させる形態とする。
【0124】
第2の例としては、特殊パス制御ステップにおいて、スピードタイプのキャラクタを標準として、フライタイプのキャラクタは、重力コントロールの発動のためのポイントは溜まりやすいが、実際に発動した後の発動時間が短い一方、パワータイプのキャラクタは、重力コントロールの発動のためのポイントは溜まりにくいが、実際に発動した後の発動時間が短いなど、キャラクタのタイプに応じて、重力コントロールの発動要件や発動時間を調整する形態とする。
【0125】
第3の例としては、特殊パス制御ステップにおいて、キャラクタのタイプに応じて、重力コントロール時の特殊パスへのアクセスを制限する形態とする。例えば、特殊パスが地上、壁、天井に設定されている場合、スピードタイプとパワータイプは、重力コントロール時に地上あるいは壁を短時間しか走行できないが、フライタイプに限り天井を長時間走行可能とする形態とする。
【0126】
また、上述した実施の形態では、コース短縮制御ステップの処理に関し、走行経路部の部品を削除することによって短縮したコースを自動的に再設定する形態を説明したが、部品を削除する形態は、部品オブジェクトを実際に削除する形態に限るものではなく、オブジェクトを縮小して部品オブジェクトを仮想的に削除する形態も含まれる。
【0127】
また、上述した実施の形態にいては、家庭用ゲーム装置に適用した場合を例として説明したが、本発明は、家庭用ゲーム装置に限らず、業務用ゲーム装置やゲーム機能を有する一般的な携帯電話機にも適用可能である。
【図面の簡単な説明】
【0128】
【図1】本発明が適用される家庭用ゲーム装置の一例を示す外観図である。
【図2】図1に例示した家庭用ゲーム装置のハードウェア構成の一例を示すブロック図である。
【図3】本発明に係るコースの基本構成の一例を示す模式図である。
【図4】本発明に係る移動体の例を示す模式図である。
【図5】本発明に係るレーシングゲームの画像例を示す図である。
【図6】本発明に係る特殊モードでの重力の作用範囲を説明するための図である。
【図7】本発明に係るレーシングゲームの全体の流れを説明するためのフローチャートである。
【図8】本発明に係るコース短縮制御ステップにおける処理の詳細を説明するためのフローチャートである。
【図9】本発明に係るコースの構成部品の例を示す模式図である。
【図10】図9の構成部品を組み合わせて形成されるコースの部位の例を示す模式図である。
【図11】本発明に係るコースの一例を示す平面図である。
【図12】本発明に係るコースの短縮処理を説明するための模式図である。
【図13】本発明に係る特殊パスを説明するための図である。
【図14】本発明に係る特殊パスにおける移動体の走行状態を説明するための図である。
【図15】本発明に係る重力コントロールの処理を説明するためのフローチャートである。
【図16】本発明に係る重力コントロールのイメージを示す第1の模式図である。
【図17】本発明に係る特殊モードでの仮想カメラの動作例を示す模式図である。
【図18】本発明に係る重力コントロールのイメージを示す第2の模式図である。
【図19】本発明に係る重力操作時の画像処理を説明するためのフローチャートである。
【図20】本発明に係る重力操作時の音声処理を説明するためのフローチャートである。
【符号の説明】
【0129】
1 ゲーム機本体
2 操作コントローラ
3 テレビジョン受像機
4 外部記憶媒体
5 通信ネットワーク
10 制御基板
11 CPU
12 ROM
13 RAM
14 画像処理回路
14a GPU
14b グラフィックメモリ
15 音声処理回路
15a SPU
15b サウンドメモリ
16 入出力機器用I/F回路
16a 操作コントローラ用I/F回路
16b 画像データ出力用I/F回路
16c 音声データ出力用I/F回路
16d DVD−ROM読取装置用I/F回路
17 通信用I/F回路
18 バス
20 外部記憶媒体読取装置
50 コース
51 コース形成用パーツ(コース構成要素)
51a 単体ブロック
51b 単体鉄骨オブジェクト
51c 単体ガードレール
52 直線状走行路
53 ドーム型屋根
54 空間部
60 移動体
61 キャラクタ(仮想の遊戯者)
62 仮想乗物
63 建造物オブジェクト
63a 壁(壁面部)
63b 屋根(天井面部)
63c トンネル状通路
63d 改札口(開閉扉部)
63e 高架
63f 線路脇の壁(壁面部)
63g 建物
64a キッカ(ジャンプ台)
64b 階段
64c タービュランス
65 アイテム
66 一般車両オブジェクト
66a タクシー
66b 列車
70 仮想カメラ
NP 通常パス
SP 特殊パス
SPa 分岐点
SPb 合流点
【特許請求の範囲】
【請求項1】
遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、
前記ゲーム処理ステップは、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、
各移動体が第1の条件を満たしているか否かを判定するステップと、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、
前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、
前記削除するステップによって削除されたパスを短縮するステップと、
を含むことを特徴とするゲームプログラム。
【請求項2】
遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、
前記ゲーム処理ステップは、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、
各移動体が第1の条件を満たしているか否かを判定するステップと、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、
前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、
前記削除するステップによって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とするステップと、
を含むことを特徴とするゲームプログラム。
【請求項3】
前記ゲーム処理ステップは、前記複数部品の一部を削除するステップにより部品が削除された場合に、新しいパスを出現させる事象を発生させるステップを更に含むことを特徴とする請求項1又は2に記載のゲームプログラム。
【請求項4】
前記複数部品の一部を削除するステップは、前記移動体の周囲に設定された空間内を対象として前記削除の処理を実行することを特徴とする請求項1乃至3のいずれかに記載のゲームプログラム。
【請求項5】
前記特殊モードは、前記操作手段の操作によって重力の操作を可能とするモードである請求項1乃至4のいずれかに記載のゲームプログラム。
【請求項6】
前記ゲーム処理ステップは、前記特殊モードが発動された際に無重力の状態を発生させるステップを更に含み、前記複数部品の一部を削除するステップは、前記無重力の発生に応じて前記削除の処理を実行することを特徴とする請求項5に記載のゲームプログラム。
【請求項7】
コンピュータ読取可能な情報記憶媒体であって、請求項1〜6のいずれかに記載のゲームプログラムを記憶した情報記憶媒体。
【請求項8】
遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、
前記ゲーム処理手段は、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、
前記削除する手段によって削除されたパスを短縮する手段と、
を含むことを特徴とするゲーム装置。
【請求項9】
遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、
前記ゲーム処理手段は、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、
前記削除する手段によって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とする手段と、
を含むことを特徴とするゲーム装置。
【請求項1】
遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、
前記ゲーム処理ステップは、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、
各移動体が第1の条件を満たしているか否かを判定するステップと、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、
前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、
前記削除するステップによって削除されたパスを短縮するステップと、
を含むことを特徴とするゲームプログラム。
【請求項2】
遊戯者が操作する操作手段と画像をモニタに表示する画像表示手段とを備えたゲーム装置のコンピュータに、前記操作手段の操作に応答して仮想空間内を移動する移動体を含む画像の画像情報生成処理を含むゲーム処理ステップを実行させるゲームプログラムであって、
前記ゲーム処理ステップは、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定するステップと、
各移動体が第1の条件を満たしているか否かを判定するステップと、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定するステップと、
前記発動を判定するステップにより前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除するステップと、
前記削除するステップによって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とするステップと、
を含むことを特徴とするゲームプログラム。
【請求項3】
前記ゲーム処理ステップは、前記複数部品の一部を削除するステップにより部品が削除された場合に、新しいパスを出現させる事象を発生させるステップを更に含むことを特徴とする請求項1又は2に記載のゲームプログラム。
【請求項4】
前記複数部品の一部を削除するステップは、前記移動体の周囲に設定された空間内を対象として前記削除の処理を実行することを特徴とする請求項1乃至3のいずれかに記載のゲームプログラム。
【請求項5】
前記特殊モードは、前記操作手段の操作によって重力の操作を可能とするモードである請求項1乃至4のいずれかに記載のゲームプログラム。
【請求項6】
前記ゲーム処理ステップは、前記特殊モードが発動された際に無重力の状態を発生させるステップを更に含み、前記複数部品の一部を削除するステップは、前記無重力の発生に応じて前記削除の処理を実行することを特徴とする請求項5に記載のゲームプログラム。
【請求項7】
コンピュータ読取可能な情報記憶媒体であって、請求項1〜6のいずれかに記載のゲームプログラムを記憶した情報記憶媒体。
【請求項8】
遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、
前記ゲーム処理手段は、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、
前記削除する手段によって削除されたパスを短縮する手段と、
を含むことを特徴とするゲーム装置。
【請求項9】
遊戯者が操作する操作手段と、画像をモニタに表示する画像表示手段と、前記操作手段の操作に応答して仮想空間内を移動する移動体を含むゲーム画像の画像情報生成手段を含むゲーム処理手段とを備えたゲーム装置であって、
前記ゲーム処理手段は、
前記移動体の走行経路となるパスの一部を複数部品で構成して前記パスを含むコースを仮想空間内に設定する手段と、
各移動体が第1の条件を満たしているか否かを判定する手段と、
前記第1の条件を満たしていると判定された移動体を操作する前記操作手段からの発動指示により、特殊モードが、前記複数部品で構成される走行経路部に対して発動されたか否かを判定する手段と、
前記発動を判定する手段により前記走行経路部に対して発動されたと判定された場合に、前記複数部品の一部を削除する手段と、
前記削除する手段によって削除された部分からその先の走行経路部へ通じる新たな経路で且つ走行距離が短縮される経路による移動体の移動を可能とする手段と、
を含むことを特徴とするゲーム装置。
【図1】


【図2】
【図3】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図19】
【図20】
【図4】
【図5】
【図12】
【図16】
【図17】
【図18】
【図2】
【図3】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図13】
【図14】
【図15】
【図19】
【図20】
【図4】
【図5】
【図12】
【図16】
【図17】
【図18】
【公開番号】特開2009−11371(P2009−11371A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2007−173295(P2007−173295)
【出願日】平成19年6月29日(2007.6.29)
【出願人】(000132471)株式会社セガ (811)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成19年6月29日(2007.6.29)
【出願人】(000132471)株式会社セガ (811)
【Fターム(参考)】
[ Back to top ]