
レーダー画像処理装置
【課題】レーダー画像の相関値を利用して変化検出を行なう場合、有意な地上変化以外の要因によって相関値が低下することを抑え、有意な地上変化による相関値低下との区別を可能にする。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はレーダー画像処理装置に関し、特に、異なる時刻に撮像した複数のレーダー画像により観測領域内における変化を検出するレーダー画像処理装置に関する。
【背景技術】
【0002】
従来より、異なる時刻に撮像したレーダー画像による地表面での変化検出は、主にレーダー画像での後方散乱強度の変化、または、画像間の相関値(コヒーレンスと呼ばれる)を用いて行なわれる。レーダーの後方散乱強度による変化検出は、例えば、台風、洪水等による氾濫地域の特定や、アマゾンにおける森林伐採の状況把握などに適用されている。一方、レーダー画像の相関値を用いて行なう変化検出は、後方散乱では判別出来ない微小な変化に対しても検出可能であり、例えば、車の轍や人間の足跡まで判別可能であることが報告されている。
【0003】
例えば、特許文献1においては、異なる時刻に撮像したレーダー画像により算出される相関値に対し、レーダー画像を取得する際のアンテナと観測対象の位置関係(以後、観測幾何と記す)の相違や、レーダー装置の信号対雑音比の影響を補正することにより、変化検出処理を行なう領域(以後、変化検出処理範囲と記す)における観測対象の時間的変化の検出精度を向上している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−3302号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献1では、レーダー画像を取得する際の観測幾何の相違による相関値への影響など、理論的に相関値への影響が導出可能な項目について補正を加えて、変化域検出の向上を図っている。しかしながら、例えば、植生域などでは、風による揺らぎや、観測間の植物の成長等により、後方散乱特性が変化し、相関値の変化が発生する。そのため、有意な地上変化による相関値の変化と区別が出来ないという問題点があった。
【0006】
また、レーダー画像特有のシャドーイング領域やレイオーバー領域も相関値低下が顕著となるが、レーダー画像のみからシャドーイング領域やレイオーバー領域を特定することは困難であり、そのため、有意な地上変化による相関値の変化と区別が出来ないという問題点があった。
【0007】
本発明は、かかる問題点を解決するためになされたもので、地表面における有意な変化を精度よく検出するレーダー画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明は、異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部とを備えたレーダー画像処理装置である。
【発明の効果】
【0009】
この発明は、異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部とを備えたレーダー画像処理装置であるので、地表面における有意な変化を精度よく検出する。
【図面の簡単な説明】
【0010】
【図1】この発明によるレーダー画像処理装置のブロック図である。
【図2】この発明によるレーダー画像処理装置の動作を説明するフローチャートである。
【図3】この発明によるレーダー画像処理装置の動作を説明するフローチャートである。
【発明を実施するための形態】
【0011】
実施の形態1.
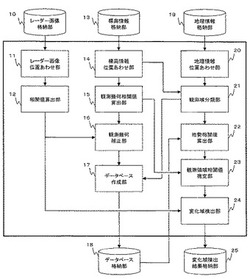
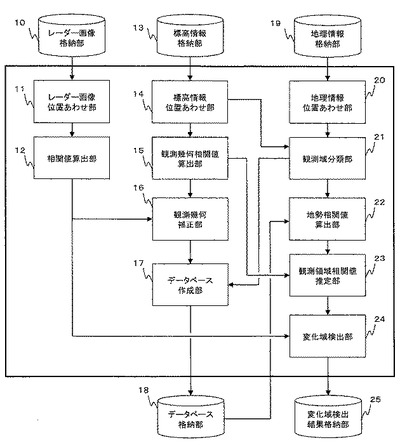
図1はこの発明の実施の形態1によるレーダー画像処理装置の構成を示すブロック図である。図1において、レーダー画像格納部10は、例えば、人工衛星や航空機などの移動体に搭載したレーダー装置にて異なる時刻に取得された観測データから作成された複数のレーダー画像を格納し、併せて、撮像時における移動体の軌道条件や姿勢条件、撮像時期、撮像当日の気象情報、撮像間隔などの観測条件の情報を格納する。レーダー画像位置あわせ部11は、レーダー画像格納部10から2枚のレーダー画像を入力し、それぞれのレーダー画像における変化検出処理範囲が正確に重なり合うように位置あわせを行う。相関値算出部12は、レーダー画像位置あわせ部11にて位置あわせが行われた2枚のレーダー画像を入力し、これらの間の相関度を示す相関値を算出する。
【0012】
標高情報格納部13には、観測範囲の地表の標高情報が予め格納されている。標高情報位置あわせ部14では、標高情報格納部13より標高情報を入力し、変化検出処理範囲における標高値を算出する。観測幾何相関値算出部15では、観測幾何(レーダー画像を取得する際のアンテナと観測対象の位置関係)と変化検出処理範囲における標高情報とを基に、2枚のレーダー画像の観測幾何の相違により発生する相関値への影響を推定する。観測幾何補正部16は、相関値算出部12から相関値を入力し、観測幾何相関値算出部15より入力した観測幾何の相違により発生する相関値に基づいて、相関値算出部12から入力した相関値の補正を行なう。
【0013】
地理情報格納部19には、観測範囲の土地利用状態等の地理情報が予め格納されている。地理情報位置あわせ部20では、地理情報格納部19から変化検出処理範囲における地理情報を取得することを行なう。観測域分類部21では地理情報位置あわせ部20で取得した地理情報を元に、変化検出処理範囲を土地利用種別ごとに分類する。データベース作成部17では、観測域分類部21にて分類した変化検出処理範囲の観測領域毎に、観測幾何補正部16で補正された相関値と、撮像時期、地理情報(土地利用種別)、撮像当日の気象情報、撮像間隔等の環境情報データとを関連付けて(対応させて)記憶してデータベース化し、データベース格納部18に格納する。
【0014】
また、地勢相関値算出部22では変化検出処理範囲における、レーダー画像取得時における観測条件(撮像時期、気象情報、撮像間隔等)および/または地理情報を検索条件にして、データベース格納部18内のデータベースの中から、最も当該検索条件に近接した環境情報データを選定し、当該環境情報データに対応する相関値を地勢相関値として出力する。観測領域相関値推定部23では、観測幾何相関値算出部15にて算出した相関値と、地勢相関値算出部22で算出した相関値とに基づいて、変化検出処理範囲の相関値を推定する。
【0015】
変化域判定部24では、相関値算出部12から入力した変化検出処理範囲の相関値と、観測領域相関値推定部23から入力した変化検出処理範囲の相関値の推定値とに基づいて、判別式、若しくは、閾値処理を用いて、地表面における変化域を特定し、変化域検出結果を変化域検出結果格納部25へ出力する。
【0016】
次に、実施の形態1によるレーダー画像処理装置の動作について説明する。レーダー画像から有意な地上変化を検出するための動作は大きく2つに分けられ、一つ目の動作は、レーダー画像から作成した相関値画像を地理情報を基に分類し、相関値のデータベースを作成する動作であり、二つ目の動作は、作成したデータベースを用いて変化検出処理範囲の相関値を推定し、レーダー画像から作成した相関値画像と比較することで変化領域を検出する動作である。
【0017】
なお、変化領域を検出する動作は、変化検出を目的に取得されたレーダー画像を入力画像として行なう動作であるが、一方、データベースを作成する動作は、変化検出以外の目的で取得されたレーダー画像も入力対象とすることが望ましい。
【0018】
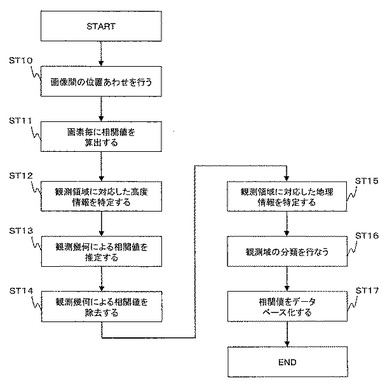
図2は、実施の形態1によるレーダー画像処理装置における、2枚のレーダー画像から相関値画像を作成し、相関値のデータベースを作成するための処理フローを示す。まず、ステップST10において、レーダー画像位置あわせ部11がレーダー画像格納部10から2枚のレーダー画像を入力し位置あわせを行う。位置あわせは、例えば、2枚のレーダー画像それぞれから同一地上位置と見なせる代表的な特徴点(山、川、あるいは、建造物など)を複数点検出して、対応付けを行なう。2枚のレーダー画像の位置あわせを行うことで、各画像上の画素点は同じ観測地点を指し示すこととなる。次に、ステップST11において、相関値算出部12が、レーダー画像位置あわせ部11にて位置あわせを行った2枚のレーダー画像を入力として、対応する画素間での相関値を算出する。位置あわせを行った画像上の画素点Pにおける相関値γPは式(1)を用いて算出される。
【0019】
【数1】

【0020】
ここで、S1,kは2枚のレーダー画像のうちの1方のレーダー画像における画素点Pを中心としたN個の画素を持つ複素数データ値であり、S2,kはもう一方のレーダー画像における画素点Pを中心としたN個の画素を持つ複素数データ値である。また、*付きは各複素数データの複素共役数を示す。このように画素点Pにおける相関値γPはこのN個の画素からなる範囲の相関値を示しており、観測の幾何条件、レーダー装置における電波送受信特性、電波伝搬条件、地表面からの電波散乱特性等のレーダー画像取得条件がほぼ同一であるならば、相関値γPはほぼ1となり、逆に、前述のレーダー画像取得条件に相違があればこの相関値γPは0に近づく。
【0021】
ステップST12において、標高情報位置あわせ部14が標高情報格納部13より標高情報を入力し、変化検出処理範囲の各画素における地上位置に対応した標高情報を取得する。ここで記述する標高情報とは、任意の地点における標高値についての情報であり、測量から得られる標高情報以外に、例えば、2枚のレーダー画像による干渉SARにより得られる標高情報や、2枚の光学画像によるステレオ視により得られる標高情報でも、利用可能とすることが望ましい。なお、変化検出を行なうレーダー画像が、倒れこみ(フォアショートニング)が発生している画像であれば、レーダー画像取得時の観測条件を基に倒れこみ量を考慮して標高情報の取得を行う。
【0022】
ステップST13においては、観測幾何相関値算出部15が、標高情報位置あわせ部14にて算出した各画素点における標高情報を基に、観測幾何の相違による相関値を算出する。観測幾何の相違による相関値γGeoは、例えば、式(2)のように2回の撮像における入射角の相違による相関値γspatialと、レーダー装置からの観測域に対する視角の相違による相関値γrotaionとの積から算出する。
【0023】
【数2】
【0024】
また、2回の撮像における入射角の相違による相関値γspatialは、例えば、式(3)で算出する。
【0025】
【数3】
【0026】
ここで、Ryはレンジ方向の分解能、dθは2回の観測の地表面における入射角差、θは2回の観測の地表面における入射角の平均値、αは地表面の傾斜、λはレーダー装置から送信する電波の波長である。なお、地表面の傾斜αは、標高情報位置あわせ部20で算出した各画素点での標高情報から得られる画素間の標高差により算出することが出来る。
【0027】
また、2回の撮像におけるレーダー装置からの観測域に対する視角の相違による相関値γrotaionは、例えば、式(4)で算出する。
【0028】
【数4】
【0029】
ここで、Rxはレーダー装置移動方向の分解能、dφは観測域に対する視角差、θは2回の観測の地表面における入射角の平均値、αは地表面の傾斜、λはレーダー装置から送信する電波の波長である。
【0030】
ここでは、観測幾何の相違による相関値の影響を、式(2)、式(3)、式(4)にて算出したが、さらに観測幾何の相違による相関値を適切に表現できるものであれば、他の式を用いてもよい。
【0031】
ステップST14において、観測幾何補正部16が、相関値算出部12において2枚のレーダー画像から算出した相関値を、観測幾何相関値算出部15が算出した観測幾何による相関値を用いて補正する。観測幾何の相関値による補正は、例えば、式(5)で行なう。
【0032】
【数5】
【0033】
なお、ここでは、観測幾何の相関値による補正を、式(5)にて算出したが、さらに観測幾何の相関値による補正を適切に表現できるものであれば、他の式を用いてもよい。
【0034】
ステップST15において、地理情報位置あわせ部20が地理情報格納部19より地理情報を入力し、変化検出処理範囲の各画素点における地理情報を取得する。ここで記述する地理情報とは地表面の利用状態(土地利用種別)を示すものであり、任意の地点が何に利用されているか、例えば、水田、畑、森林、宅地、高層ビルなどの利用状況を指し示す情報であり、それぞれの高さ情報も含まれることが望ましい。地理情報が取得できない観測域や、地理情報の信頼性が低い観測域については、地理情報の代用として、人工衛星や航空機にて撮影した光学画像を基に地理情報を取得しても良い。すなわち、光学画像に基づいて利用状態をユーザが判断し、地理情報として入力するようにしてもよい。
【0035】
ステップST16において、観測域分類部21が、地理情報位置あわせ部20において取得した地理情報を元に、変化検出処理範囲内で同じ土地利用種別を持つ領域をグルーピングする。また、観測域分類部21は、標高情報、地理情報に含まれる高さ情報、及び、撮像時の観測幾何から、変化検出処理範囲内においてレーダーの後方散乱が得られないシャドー領域を決定することが出来る。
【0036】
ステップST17において、データベース作成部17が、観測幾何補正部16にて算出された相関値を、環境情報に関連させて記憶させ、データベース化する。この場合の環境情報とは、観測時期、観測時における気象条件、観測幾何(入射角、視角、基線長等)、観測間隔、軌道交差角等の観測条件の少なくとも1つ、標高情報(標高、斜度)、及び/または、地理情報(土地利用種別)である。なお、2枚の画像から得られた相関値画像はノイズの影響により局所的なばらつきが発生しているため、観測幾何補正部16にて算出された相関値の値をそのままデータベースに記憶させずに、地理情報を元に観測域の土地利用毎に分類した単位で、観測幾何補正部16にて算出された相関値に対して、最大値、最小値、平均値、分散値、又は、標準偏差などの統計的解析を行なった結果をデータベース化することが望ましい。また、観測領域内において有意な地上変化の発生が既知である場合には、その変化についての情報もデータベースに格納することが望ましい。データベース作成部17で作成したデータベースはデータベース格納部18において蓄積し、変化域検出を行なう時に使用する。
【0037】
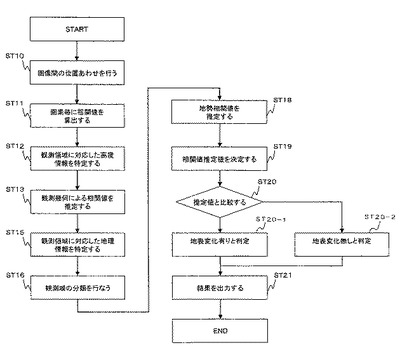
図3は、実施の形態1によるレーダー画像処理装置における、データベースから観測領域の相関値を推定し、レーダー画像から算出した相関値と比較することで地上の変化領域を検出するための処理フローを示す。まず、ステップST10からステップST11までにおいては、変化検出を行なう2枚のレーダー画像から相関値画像を作成する動作であり、実施の形態1のデータベース作成時の動作と同一である。また、ステップST12からステップST13までは、観測領域における観測幾何による相関値を推定する動作であり、実施の形態1のデータベース作成時の動作と同一である。また、ステップST15からステップST16までにおいては、変化検出を行なう観測領域を土地利用に応じて分類する動作であり、実施の形態1のデータベース作成時の動作と同一である。
【0038】
ステップST18は、地勢相関値算出部22が、変化検出処理範囲における環境情報によって決定される相関値(以後、地勢相関値と呼ぶ。)を決定する動作であり、観測域分類部21で分類された観測領域ごとに、観測時期、地理情報、観測時における気象条件や、観測幾何等の、環境情報(観測条件および/または観測環境)の項目を検索条件として、データベース格納部18内を検索し、当該検索条件に最も近い環境情報を選択し、選択した環境情報に対応する相関値を当該観測領域の地勢相関値として決定することを行なう。なお、検索条件の項目に応じて優先度を選定し、それらの1以上の項目を用いた判別式による決定方法や閾値処理による決定方法を用いてもよい。
【0039】
ステップST19において、観測領域相関値推定部23が、地勢相関値算出部22にて抽出した観測領域の観測環境による地勢相関値γfeildと、観測幾何相関値算出部15にて算出した観測幾何による相関値γGeoとから、例えば、式(6)により、変化域検出時に用いる観測領域の推定相関値γestimateを決定する。
【0040】
【数6】
【0041】
なお、ここでは、観測領域の推定相関値を、式(6)にて算出したが、さらに観測領域の相関値を適切に表現できるものであれば、他の式を用いてもよい。
【0042】
ステップST20においては、変化域検出部24が、相関値算出部12にて2枚のレーダー画像から算出した相関値γPと、観測領域相関値推定部23にて推定した同じ領域の推定相関値γestimateとを入力し、それらの大小関係にて地表変化の有無を判定する。ただし、2枚の画像から得られた相関値γPはノイズの影響により局所的なばらつきが発生してするため、相関値をデータベース化する際に採用した統計的解析法と同じ方法で算出した相関値γP_statを変化域判定に用いることが望ましい。
【0043】
変化域の判定方法は、例えば、γP_stat<γestimateを満たす場合に地上変化有り(ST20−1)、γP_stat≧γestimateを満たす場合に地上変化無し(ST20−2)と判定する。また、例えば、レーダー画像の位置あわせの精度より相関値が全体的に低下してしまう場合も想定されるため、変化域検出時に相関値に重みβを付加し、γP_stat<γestimateを満たす場合に地上変化有り、γP_stat≧γestimateを満たす場合に地上変化無しのように判定してもよい。上記のような判定を変化検出処理範囲の全画素点で行なうことで、地表変化の有無を示す変化検出画像を得ることが出来き、ステップST21にてその結果を変化域検出結果格納部25へ出力する。
【0044】
以上のように、実施の形態1においては、相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成し、変化検出を行う際には、観測領域相関値推定部23において、変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出するようにしたので、観測幾何による相関値の影響と観測対象領域の環境よる相関値の影響を総合評価して、変化領域の検出を行なうことができ、有意な地上変化を精度良く検出することができる。
【0045】
また、地理情報に基づき観測領域の環境よる影響を評価した相関値をデータベースとして構築し、これを元に観測領域の相関値を推定するため、実際に観測を行なわずとも、観測条件を設定するだけで観測領域の相関値を推定することができる。
【0046】
また、上記データベースにより観測領域の相関値を推定するため、過去に観測経験が無く、地理情報もない領域であっても、光学画像を用いることでその領域の相関値を推定することができる。
【0047】
また、上記データベース用いて、レーダー画像から得られる相関値から地理情報を検索することで、地理情報の無い領域の土地利用を推察することができる。
【符号の説明】
【0048】
10 レーダー画像格納部、11 レーダー画像位置あわせ部、12 相関値算出部、13 標高情報格納部、14 標高情報位置あわせ部、15 観測幾何相関値算出部、16 観測幾何補正部、17 データベース作成部、18 データベース格納部、19 地理情報格納部、20 地理情報位置あわせ部、21 観測域分類部、22 地勢相関値算出部、23 観測領域相関値推定部、24 変化域検出部、25 変化域検出結果格納部。
【技術分野】
【0001】
本発明はレーダー画像処理装置に関し、特に、異なる時刻に撮像した複数のレーダー画像により観測領域内における変化を検出するレーダー画像処理装置に関する。
【背景技術】
【0002】
従来より、異なる時刻に撮像したレーダー画像による地表面での変化検出は、主にレーダー画像での後方散乱強度の変化、または、画像間の相関値(コヒーレンスと呼ばれる)を用いて行なわれる。レーダーの後方散乱強度による変化検出は、例えば、台風、洪水等による氾濫地域の特定や、アマゾンにおける森林伐採の状況把握などに適用されている。一方、レーダー画像の相関値を用いて行なう変化検出は、後方散乱では判別出来ない微小な変化に対しても検出可能であり、例えば、車の轍や人間の足跡まで判別可能であることが報告されている。
【0003】
例えば、特許文献1においては、異なる時刻に撮像したレーダー画像により算出される相関値に対し、レーダー画像を取得する際のアンテナと観測対象の位置関係(以後、観測幾何と記す)の相違や、レーダー装置の信号対雑音比の影響を補正することにより、変化検出処理を行なう領域(以後、変化検出処理範囲と記す)における観測対象の時間的変化の検出精度を向上している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−3302号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の特許文献1では、レーダー画像を取得する際の観測幾何の相違による相関値への影響など、理論的に相関値への影響が導出可能な項目について補正を加えて、変化域検出の向上を図っている。しかしながら、例えば、植生域などでは、風による揺らぎや、観測間の植物の成長等により、後方散乱特性が変化し、相関値の変化が発生する。そのため、有意な地上変化による相関値の変化と区別が出来ないという問題点があった。
【0006】
また、レーダー画像特有のシャドーイング領域やレイオーバー領域も相関値低下が顕著となるが、レーダー画像のみからシャドーイング領域やレイオーバー領域を特定することは困難であり、そのため、有意な地上変化による相関値の変化と区別が出来ないという問題点があった。
【0007】
本発明は、かかる問題点を解決するためになされたもので、地表面における有意な変化を精度よく検出するレーダー画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明は、異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部とを備えたレーダー画像処理装置である。
【発明の効果】
【0009】
この発明は、異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部とを備えたレーダー画像処理装置であるので、地表面における有意な変化を精度よく検出する。
【図面の簡単な説明】
【0010】
【図1】この発明によるレーダー画像処理装置のブロック図である。
【図2】この発明によるレーダー画像処理装置の動作を説明するフローチャートである。
【図3】この発明によるレーダー画像処理装置の動作を説明するフローチャートである。
【発明を実施するための形態】
【0011】
実施の形態1.
図1はこの発明の実施の形態1によるレーダー画像処理装置の構成を示すブロック図である。図1において、レーダー画像格納部10は、例えば、人工衛星や航空機などの移動体に搭載したレーダー装置にて異なる時刻に取得された観測データから作成された複数のレーダー画像を格納し、併せて、撮像時における移動体の軌道条件や姿勢条件、撮像時期、撮像当日の気象情報、撮像間隔などの観測条件の情報を格納する。レーダー画像位置あわせ部11は、レーダー画像格納部10から2枚のレーダー画像を入力し、それぞれのレーダー画像における変化検出処理範囲が正確に重なり合うように位置あわせを行う。相関値算出部12は、レーダー画像位置あわせ部11にて位置あわせが行われた2枚のレーダー画像を入力し、これらの間の相関度を示す相関値を算出する。
【0012】
標高情報格納部13には、観測範囲の地表の標高情報が予め格納されている。標高情報位置あわせ部14では、標高情報格納部13より標高情報を入力し、変化検出処理範囲における標高値を算出する。観測幾何相関値算出部15では、観測幾何(レーダー画像を取得する際のアンテナと観測対象の位置関係)と変化検出処理範囲における標高情報とを基に、2枚のレーダー画像の観測幾何の相違により発生する相関値への影響を推定する。観測幾何補正部16は、相関値算出部12から相関値を入力し、観測幾何相関値算出部15より入力した観測幾何の相違により発生する相関値に基づいて、相関値算出部12から入力した相関値の補正を行なう。
【0013】
地理情報格納部19には、観測範囲の土地利用状態等の地理情報が予め格納されている。地理情報位置あわせ部20では、地理情報格納部19から変化検出処理範囲における地理情報を取得することを行なう。観測域分類部21では地理情報位置あわせ部20で取得した地理情報を元に、変化検出処理範囲を土地利用種別ごとに分類する。データベース作成部17では、観測域分類部21にて分類した変化検出処理範囲の観測領域毎に、観測幾何補正部16で補正された相関値と、撮像時期、地理情報(土地利用種別)、撮像当日の気象情報、撮像間隔等の環境情報データとを関連付けて(対応させて)記憶してデータベース化し、データベース格納部18に格納する。
【0014】
また、地勢相関値算出部22では変化検出処理範囲における、レーダー画像取得時における観測条件(撮像時期、気象情報、撮像間隔等)および/または地理情報を検索条件にして、データベース格納部18内のデータベースの中から、最も当該検索条件に近接した環境情報データを選定し、当該環境情報データに対応する相関値を地勢相関値として出力する。観測領域相関値推定部23では、観測幾何相関値算出部15にて算出した相関値と、地勢相関値算出部22で算出した相関値とに基づいて、変化検出処理範囲の相関値を推定する。
【0015】
変化域判定部24では、相関値算出部12から入力した変化検出処理範囲の相関値と、観測領域相関値推定部23から入力した変化検出処理範囲の相関値の推定値とに基づいて、判別式、若しくは、閾値処理を用いて、地表面における変化域を特定し、変化域検出結果を変化域検出結果格納部25へ出力する。
【0016】
次に、実施の形態1によるレーダー画像処理装置の動作について説明する。レーダー画像から有意な地上変化を検出するための動作は大きく2つに分けられ、一つ目の動作は、レーダー画像から作成した相関値画像を地理情報を基に分類し、相関値のデータベースを作成する動作であり、二つ目の動作は、作成したデータベースを用いて変化検出処理範囲の相関値を推定し、レーダー画像から作成した相関値画像と比較することで変化領域を検出する動作である。
【0017】
なお、変化領域を検出する動作は、変化検出を目的に取得されたレーダー画像を入力画像として行なう動作であるが、一方、データベースを作成する動作は、変化検出以外の目的で取得されたレーダー画像も入力対象とすることが望ましい。
【0018】
図2は、実施の形態1によるレーダー画像処理装置における、2枚のレーダー画像から相関値画像を作成し、相関値のデータベースを作成するための処理フローを示す。まず、ステップST10において、レーダー画像位置あわせ部11がレーダー画像格納部10から2枚のレーダー画像を入力し位置あわせを行う。位置あわせは、例えば、2枚のレーダー画像それぞれから同一地上位置と見なせる代表的な特徴点(山、川、あるいは、建造物など)を複数点検出して、対応付けを行なう。2枚のレーダー画像の位置あわせを行うことで、各画像上の画素点は同じ観測地点を指し示すこととなる。次に、ステップST11において、相関値算出部12が、レーダー画像位置あわせ部11にて位置あわせを行った2枚のレーダー画像を入力として、対応する画素間での相関値を算出する。位置あわせを行った画像上の画素点Pにおける相関値γPは式(1)を用いて算出される。
【0019】
【数1】
【0020】
ここで、S1,kは2枚のレーダー画像のうちの1方のレーダー画像における画素点Pを中心としたN個の画素を持つ複素数データ値であり、S2,kはもう一方のレーダー画像における画素点Pを中心としたN個の画素を持つ複素数データ値である。また、*付きは各複素数データの複素共役数を示す。このように画素点Pにおける相関値γPはこのN個の画素からなる範囲の相関値を示しており、観測の幾何条件、レーダー装置における電波送受信特性、電波伝搬条件、地表面からの電波散乱特性等のレーダー画像取得条件がほぼ同一であるならば、相関値γPはほぼ1となり、逆に、前述のレーダー画像取得条件に相違があればこの相関値γPは0に近づく。
【0021】
ステップST12において、標高情報位置あわせ部14が標高情報格納部13より標高情報を入力し、変化検出処理範囲の各画素における地上位置に対応した標高情報を取得する。ここで記述する標高情報とは、任意の地点における標高値についての情報であり、測量から得られる標高情報以外に、例えば、2枚のレーダー画像による干渉SARにより得られる標高情報や、2枚の光学画像によるステレオ視により得られる標高情報でも、利用可能とすることが望ましい。なお、変化検出を行なうレーダー画像が、倒れこみ(フォアショートニング)が発生している画像であれば、レーダー画像取得時の観測条件を基に倒れこみ量を考慮して標高情報の取得を行う。
【0022】
ステップST13においては、観測幾何相関値算出部15が、標高情報位置あわせ部14にて算出した各画素点における標高情報を基に、観測幾何の相違による相関値を算出する。観測幾何の相違による相関値γGeoは、例えば、式(2)のように2回の撮像における入射角の相違による相関値γspatialと、レーダー装置からの観測域に対する視角の相違による相関値γrotaionとの積から算出する。
【0023】
【数2】
【0024】
また、2回の撮像における入射角の相違による相関値γspatialは、例えば、式(3)で算出する。
【0025】
【数3】
【0026】
ここで、Ryはレンジ方向の分解能、dθは2回の観測の地表面における入射角差、θは2回の観測の地表面における入射角の平均値、αは地表面の傾斜、λはレーダー装置から送信する電波の波長である。なお、地表面の傾斜αは、標高情報位置あわせ部20で算出した各画素点での標高情報から得られる画素間の標高差により算出することが出来る。
【0027】
また、2回の撮像におけるレーダー装置からの観測域に対する視角の相違による相関値γrotaionは、例えば、式(4)で算出する。
【0028】
【数4】
【0029】
ここで、Rxはレーダー装置移動方向の分解能、dφは観測域に対する視角差、θは2回の観測の地表面における入射角の平均値、αは地表面の傾斜、λはレーダー装置から送信する電波の波長である。
【0030】
ここでは、観測幾何の相違による相関値の影響を、式(2)、式(3)、式(4)にて算出したが、さらに観測幾何の相違による相関値を適切に表現できるものであれば、他の式を用いてもよい。
【0031】
ステップST14において、観測幾何補正部16が、相関値算出部12において2枚のレーダー画像から算出した相関値を、観測幾何相関値算出部15が算出した観測幾何による相関値を用いて補正する。観測幾何の相関値による補正は、例えば、式(5)で行なう。
【0032】
【数5】
【0033】
なお、ここでは、観測幾何の相関値による補正を、式(5)にて算出したが、さらに観測幾何の相関値による補正を適切に表現できるものであれば、他の式を用いてもよい。
【0034】
ステップST15において、地理情報位置あわせ部20が地理情報格納部19より地理情報を入力し、変化検出処理範囲の各画素点における地理情報を取得する。ここで記述する地理情報とは地表面の利用状態(土地利用種別)を示すものであり、任意の地点が何に利用されているか、例えば、水田、畑、森林、宅地、高層ビルなどの利用状況を指し示す情報であり、それぞれの高さ情報も含まれることが望ましい。地理情報が取得できない観測域や、地理情報の信頼性が低い観測域については、地理情報の代用として、人工衛星や航空機にて撮影した光学画像を基に地理情報を取得しても良い。すなわち、光学画像に基づいて利用状態をユーザが判断し、地理情報として入力するようにしてもよい。
【0035】
ステップST16において、観測域分類部21が、地理情報位置あわせ部20において取得した地理情報を元に、変化検出処理範囲内で同じ土地利用種別を持つ領域をグルーピングする。また、観測域分類部21は、標高情報、地理情報に含まれる高さ情報、及び、撮像時の観測幾何から、変化検出処理範囲内においてレーダーの後方散乱が得られないシャドー領域を決定することが出来る。
【0036】
ステップST17において、データベース作成部17が、観測幾何補正部16にて算出された相関値を、環境情報に関連させて記憶させ、データベース化する。この場合の環境情報とは、観測時期、観測時における気象条件、観測幾何(入射角、視角、基線長等)、観測間隔、軌道交差角等の観測条件の少なくとも1つ、標高情報(標高、斜度)、及び/または、地理情報(土地利用種別)である。なお、2枚の画像から得られた相関値画像はノイズの影響により局所的なばらつきが発生しているため、観測幾何補正部16にて算出された相関値の値をそのままデータベースに記憶させずに、地理情報を元に観測域の土地利用毎に分類した単位で、観測幾何補正部16にて算出された相関値に対して、最大値、最小値、平均値、分散値、又は、標準偏差などの統計的解析を行なった結果をデータベース化することが望ましい。また、観測領域内において有意な地上変化の発生が既知である場合には、その変化についての情報もデータベースに格納することが望ましい。データベース作成部17で作成したデータベースはデータベース格納部18において蓄積し、変化域検出を行なう時に使用する。
【0037】
図3は、実施の形態1によるレーダー画像処理装置における、データベースから観測領域の相関値を推定し、レーダー画像から算出した相関値と比較することで地上の変化領域を検出するための処理フローを示す。まず、ステップST10からステップST11までにおいては、変化検出を行なう2枚のレーダー画像から相関値画像を作成する動作であり、実施の形態1のデータベース作成時の動作と同一である。また、ステップST12からステップST13までは、観測領域における観測幾何による相関値を推定する動作であり、実施の形態1のデータベース作成時の動作と同一である。また、ステップST15からステップST16までにおいては、変化検出を行なう観測領域を土地利用に応じて分類する動作であり、実施の形態1のデータベース作成時の動作と同一である。
【0038】
ステップST18は、地勢相関値算出部22が、変化検出処理範囲における環境情報によって決定される相関値(以後、地勢相関値と呼ぶ。)を決定する動作であり、観測域分類部21で分類された観測領域ごとに、観測時期、地理情報、観測時における気象条件や、観測幾何等の、環境情報(観測条件および/または観測環境)の項目を検索条件として、データベース格納部18内を検索し、当該検索条件に最も近い環境情報を選択し、選択した環境情報に対応する相関値を当該観測領域の地勢相関値として決定することを行なう。なお、検索条件の項目に応じて優先度を選定し、それらの1以上の項目を用いた判別式による決定方法や閾値処理による決定方法を用いてもよい。
【0039】
ステップST19において、観測領域相関値推定部23が、地勢相関値算出部22にて抽出した観測領域の観測環境による地勢相関値γfeildと、観測幾何相関値算出部15にて算出した観測幾何による相関値γGeoとから、例えば、式(6)により、変化域検出時に用いる観測領域の推定相関値γestimateを決定する。
【0040】
【数6】
【0041】
なお、ここでは、観測領域の推定相関値を、式(6)にて算出したが、さらに観測領域の相関値を適切に表現できるものであれば、他の式を用いてもよい。
【0042】
ステップST20においては、変化域検出部24が、相関値算出部12にて2枚のレーダー画像から算出した相関値γPと、観測領域相関値推定部23にて推定した同じ領域の推定相関値γestimateとを入力し、それらの大小関係にて地表変化の有無を判定する。ただし、2枚の画像から得られた相関値γPはノイズの影響により局所的なばらつきが発生してするため、相関値をデータベース化する際に採用した統計的解析法と同じ方法で算出した相関値γP_statを変化域判定に用いることが望ましい。
【0043】
変化域の判定方法は、例えば、γP_stat<γestimateを満たす場合に地上変化有り(ST20−1)、γP_stat≧γestimateを満たす場合に地上変化無し(ST20−2)と判定する。また、例えば、レーダー画像の位置あわせの精度より相関値が全体的に低下してしまう場合も想定されるため、変化域検出時に相関値に重みβを付加し、γP_stat<γestimateを満たす場合に地上変化有り、γP_stat≧γestimateを満たす場合に地上変化無しのように判定してもよい。上記のような判定を変化検出処理範囲の全画素点で行なうことで、地表変化の有無を示す変化検出画像を得ることが出来き、ステップST21にてその結果を変化域検出結果格納部25へ出力する。
【0044】
以上のように、実施の形態1においては、相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成し、変化検出を行う際には、観測領域相関値推定部23において、変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出するようにしたので、観測幾何による相関値の影響と観測対象領域の環境よる相関値の影響を総合評価して、変化領域の検出を行なうことができ、有意な地上変化を精度良く検出することができる。
【0045】
また、地理情報に基づき観測領域の環境よる影響を評価した相関値をデータベースとして構築し、これを元に観測領域の相関値を推定するため、実際に観測を行なわずとも、観測条件を設定するだけで観測領域の相関値を推定することができる。
【0046】
また、上記データベースにより観測領域の相関値を推定するため、過去に観測経験が無く、地理情報もない領域であっても、光学画像を用いることでその領域の相関値を推定することができる。
【0047】
また、上記データベース用いて、レーダー画像から得られる相関値から地理情報を検索することで、地理情報の無い領域の土地利用を推察することができる。
【符号の説明】
【0048】
10 レーダー画像格納部、11 レーダー画像位置あわせ部、12 相関値算出部、13 標高情報格納部、14 標高情報位置あわせ部、15 観測幾何相関値算出部、16 観測幾何補正部、17 データベース作成部、18 データベース格納部、19 地理情報格納部、20 地理情報位置あわせ部、21 観測域分類部、22 地勢相関値算出部、23 観測領域相関値推定部、24 変化域検出部、25 変化域検出結果格納部。
【特許請求の範囲】
【請求項1】
異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、
上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、
上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、
上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、
上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、
上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、
上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部と
を備えたレーダー画像処理装置。
【請求項2】
上記地勢相関値算出部は、上記データベースを検索して、上記データベースに記憶された環境情報のうちで検索条件に最も近い環境情報を選択し、それに対応した相関値を地勢相関値として出力することを特徴とする請求項1に記載のレーダー画像処理装置。
【請求項3】
上記データベース作成部において上記相関値に関連付ける上記環境情報は、観測領域の土地利用種別、観測時期、入射角、観測時気象、観測間隔、軌道交差角、標高、および、斜度の項目のうちの何れか1つ以上であることを特徴とする請求項1または2に記載のレーダー画像処理装置。
【請求項4】
上記データベース作成部において上記データベースに記憶される上記相関値は、上記観測幾何補正部で補正した相関値に対して、平均値、分散値、標準偏差、最大値、最小値の何れか1つ以上の統計的解析を行った結果の統計値であることを特徴とする請求項1ないし3のいずれか1項に記載のレーダー画像処理装置。
【請求項1】
異なる時刻にレーダー装置より取得された2つのレーダー画像から所定範囲における相関値を算出する相関値算出部と、
上記2つのレーダー画像取得時における入射角の相違と観測対象物に対する視角の相違とに基づく観測幾何相関値を算出する観測幾何相関値算出部と、
上記観測幾何相関値算出部で算出した観測幾何相関値を用いて、上記相関値算出部で算出した相関値を補正する観測幾何補正部と、
上記観測幾何補正部で補正した相関値と上記所定範囲おける観測対象物の環境情報とを関連付けて記憶するデータベースを作成するデータベース作成部と、
上記データベース作成部で作成したデータベースを用いて、変化検出処理範囲内の観測対象物の環境情報に基づく地勢相関値を算出する地勢相関値算出部と、
上記地勢相関値算出部で算出した地勢相関値と上記観測幾何相関値算出部で算出した観測幾何相関値とに基づいて、変化検出処理範囲内の相関値を推定する観測領域相関値推定部と、
上記観測領域相関値推定部で算出した相関値により変化検出処理範囲での地上変化を検出する変化域検出部と
を備えたレーダー画像処理装置。
【請求項2】
上記地勢相関値算出部は、上記データベースを検索して、上記データベースに記憶された環境情報のうちで検索条件に最も近い環境情報を選択し、それに対応した相関値を地勢相関値として出力することを特徴とする請求項1に記載のレーダー画像処理装置。
【請求項3】
上記データベース作成部において上記相関値に関連付ける上記環境情報は、観測領域の土地利用種別、観測時期、入射角、観測時気象、観測間隔、軌道交差角、標高、および、斜度の項目のうちの何れか1つ以上であることを特徴とする請求項1または2に記載のレーダー画像処理装置。
【請求項4】
上記データベース作成部において上記データベースに記憶される上記相関値は、上記観測幾何補正部で補正した相関値に対して、平均値、分散値、標準偏差、最大値、最小値の何れか1つ以上の統計的解析を行った結果の統計値であることを特徴とする請求項1ないし3のいずれか1項に記載のレーダー画像処理装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−281617(P2010−281617A)
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願番号】特願2009−133614(P2009−133614)
【出願日】平成21年6月3日(2009.6.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年12月16日(2010.12.16)
【国際特許分類】
【出願日】平成21年6月3日(2009.6.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]