
レーダー装置の軸調整方法および軸調整装置
【課題】車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法を提供することを目的とする。
【解決手段】電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、調整対象レーダーの軸を調整する調整工程とを含み、調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出状態を変更する、レーダー装置の軸調整方法。
【解決手段】電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、調整対象レーダーの軸を調整する調整工程とを含み、調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出状態を変更する、レーダー装置の軸調整方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダー装置の検出軸調整方法に関し、より特定的には、車両に備えられた複数のレーダー装置の検出軸を調整する方法に関する。
【背景技術】
【0002】
従来、車両周囲の物体を検出するレーダー装置、および当該レーダー装置を用いた車両の衝突防止システムが開発されている。このようなシステムに用いられるレーダー装置の一例として、ミリ波レーダー装置がある。一般的なミリ波レーダー装置は、所定の方向へ電磁波を送信する送信部と、当該電磁波の反射波を受信する受信部を備える。そして、ミリ波レーダー装置は、物体に反射された反射波にもとづいて当該物体の位置を、基準軸を基準として検出する。なお、基準軸とは、検出された物体の位置を定義するために各車載レーダーから当該車載レーダーの前方へ向けて仮想的に設定される軸線である。
【0003】
上記の通り、ミリ波レーダーは、物体の位置を基準軸にもとづいて検出する。したがって、基準軸が正しい位置に設定されていなければ、先行車や障害物など、車両周囲の物体の位置が誤って検出されてしまう場合がある。そして、車両周囲の物体の位置が誤って検出された場合、衝突防止システムなどの、当該物体の検出位置にもとづいて車両を制御するシステムが、正常に作動しなくなり、適切な車両制御が実行されなくなる恐れがある。このような問題を解決するために、ミリ波レーダーの基準軸を予め正しい位置に調整しておく必要がある。
【0004】
ミリ波レーダーの軸調整方法の一例が、特許文献1に開示されている。特許文献1に開示される軸調整方法では、電磁波反射体の多重反射像をレーダー装置により検出する。そして、多重反射像が所定の位置で検出されるようにレーダー装置の取り付け位置を調整して、基準軸を調整する。このような調整方法によれば、通常より省スペースでレーダー装置の基準軸を調整することができる。
【特許文献1】特開2007−240369号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、近年、車両周囲の物体を、より正確に、より広い範囲で検出するために複数のミリ波レーダーを備えた車両が開発されている。このような車両に搭載された複数のミリ波レーダーの基準軸を調整する場合、各ミリ波レーダーから送出される電磁波が互いに干渉して、当該電磁波の位相や強度や周波数が変化する場合がある。各ミリ波レーダーから送出された電磁波が物体に反射されて当該ミリ波レーダーに受信されるまでの間に、上記のような干渉により当該電磁波の位相や強度や周波数が変化した場合、当該ミリ波レーダーは、物体の位置を誤って検出してしまうことがある。したがって、特許文献1になど開示される従来の軸調整方法では、車両に複数のミリ波レーダーが備えられている場合、当該ミリ波レーダーにより電磁波反射体の位置を正しく検出することができず、当該ミリ波レーダーの軸調整を正しく行うことができない場合がある。
【0006】
本発明は上記課題に鑑みてなされたものであり、車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、調整対象レーダーの軸を調整する調整工程とを含み、調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出状態を変更する、レーダー装置の軸調整方法。
【0008】
調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出を停止する、請求項1に記載のレーダー装置の軸調整方法。
【0009】
調整工程において、少なくとも調整対象レーダーを調整している間、調整対象レーダーから送出される電磁波の照射範囲と非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、非調整対象レーダーが電磁波を送出する方向を変更する、請求項1に記載のレーダー装置の軸調整方法。
【0010】
軸調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーから送出される電磁波の周波数を、調整対象レーダーから送出される電磁波の周波数と異なる帯域の周波数に変調する、請求項1に記載のレーダー装置の軸調整方法。
【発明の効果】
【0011】
第1の発明によれば、調整対象レーダーの軸調整を行っている間、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を防止することができる。その結果、調整対象レーダーを正しく軸調整することができる。
【0012】
第2の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を、簡単な制御処理および構成で防止することができる。
【0013】
第3の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を簡単な制御処理で防止することができる。
【0014】
第4の発明によれば、第3の発明において、容易に非調整対象レーダーが電磁波を送出する方向を変更することができる。
【0015】
第5の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を、簡単な制御処理および構成で防止することができる。
【発明を実施するための最良の形態】
【0016】
(第1の実施形態)
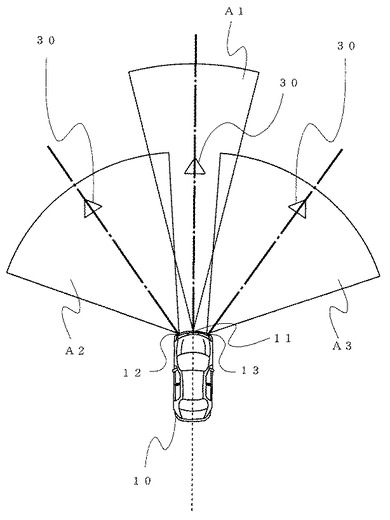
以下、本発明の実施形態に係るレーダー装置の軸調整方法について説明する。第1の実施形態では、複数のターゲット30を用いて、車両10に備えられた前方レーダー11、左前方レーダー12、および右前方レーダー13各々の基準軸を調整する例について説明する。
【0017】
前方レーダー11、左前方レーダー12、および、右前方レーダー13は、何れも典型的なFM−CW方式のミリ波レーダー装置である。以下、前方レーダー11、左前方レーダー12、および、右前方レーダー13を総称して車載レーダーと呼称する。車載レーダーは電磁波を送出し、物体から反射された当該電磁波を受信して、当該物体の水平方向の位置を検出する。各車載レーダーは、物体までの距離を上記送信波の周波数と反射波の周波数との差異にもとづいて検出する。また、各車載レーダーは、物体が存在する方向を示す角度(以下、検出角と呼称する)を反射波の位相にもとづいて検出する。検出角は、当該検出を行う車載レーダーの基準軸と、物体および当該車載レーダーの受信部を結ぶ直線とが成す角度である。基準軸とは、検出角を上記の通り定義するために各車載レーダーから当該車載レーダーの前方へ向けて仮想的に設定される軸線(図4中の1点鎖線)である。各車載レーダーは、基準軸を調整する処理プログラムを記憶した処理装置を備え、レーダー制御ECU14の指示に応じて、当該処理装置により基準軸を調整する。
【0018】
ターゲット30は、車載レーダーから送出される電磁波を反射する反射体である。ターゲット30は、1面を開口した正四面体形状を成し、当該正四面体の各面は、アルミ板により構成される。ターゲット30は、各車載レーダーから開口部が見えるように配置される。なお、車載レーダーから送信される電磁波を良好に反射可能であれば、ターゲット30の形状および構成材料は上記に限らない。
【0019】
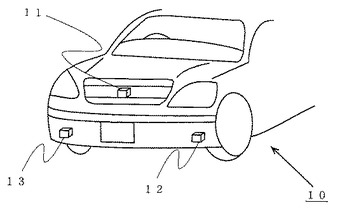
図1に示すように、車両10には、前方レーダー11、左前方レーダー12、および、右前方レーダー13の3つのレーダー装置が備えられる。図1は、前方レーダー11、左前方レーダー12、および、右前方レーダー13の搭載図である。前方レーダー11は、車両10の前方中央のフロントグリル内側に配置される。また、左前方レーダー12は、車両10のフロントバンパー左端に配置される。また、右前方レーダー13は、車両10のフロントバンパー左端に配置される。このようにして、前方レーダー11は車両10を前後に貫通する中心線上に配置され、左前方レーダー12および右前方レーダー13は各々当該中心線を中心として左右略対称に配置される。
【0020】
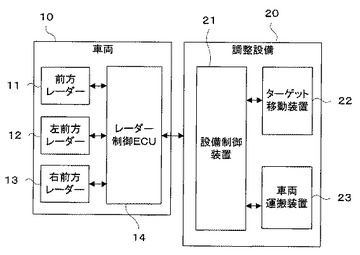
次に、図2を参照して、車載レーダーを調整するシステムの機能構成について説明する。図2は、車載レーダーを調整するシステムの機能構成を示すブロック図である。
【0021】
車両10は、前方レーダー11、左前方レーダー12、右前方レーダー13、およびレーダー制御ECU14を備える。各車載レーダー、およびレーダー制御ECU14は、何れも車両10のIG電源がON状態である場合に動作する。すなわち、車両10のIG電源がON状態である場合、各車載レーダーは、電磁波を送出する状態となる。
【0022】
前方レーダー11、左前方レーダー12、および、右前方レーダー13は、各々レーダー制御ECU14に接続される。そして、各車載レーダーは、レーダー制御ECU14へ出力する。
【0023】
レーダー制御ECU14は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。レーダー制御ECU14は、設備制御装置21に接続される。
【0024】
レーダー制御ECU14は、各車載レーダーに対して、電磁波の送出状態を指示する指示信号、および、基準軸を調整する指示信号を出力する。
【0025】
調整設備20は、設備制御装置21、ターゲット移動装置22、および車両運搬装置23を備える設備である。
【0026】
設備制御装置21は、典型的には、CPUなどの情報処理装置、メモリなどの記憶装置、インターフェース回路、および操作盤などを備える制御装置である。設備制御装置21は、レーダー制御ECU14、ターゲット移動装置22、および車両運搬装置23と各々接続される。
【0027】
設備制御装置21は、レーダー制御ECU14に対して車載レーダーの調整を開始する指示信号(以下、調整開始信号と呼称する)を出力する。また、設備制御装置21は、ターゲット移動装置22に対してターゲット30を移動する指示信号(以下、ターゲット移動信号と呼称する)を出力する。また、設備制御装置21は、車両運搬装置23に対して車両10を移動する指示信号(以下、車両運搬信号と呼称する)を出力する。なお、作業者は、設備制御装置21を操作して、上記の調整開始信号およびターゲット移動信号を任意に出力させることができる。
【0028】
ターゲット移動装置22は、設備制御装置21から出力されるターゲット移動信号にしたがってターゲット30を定められた位置(以下、ターゲット原位置と呼称する)へ移動させる移動装置である。ターゲット移動装置22は、典型的には、ターゲット30を移動部位に備え付けた既知の位置決め装置である。なお、ターゲット移動装置22は、ターゲット30をターゲット原位置へ移動させることが可能な装置であれば、従来周知の各種移動装置を用いて良い。
【0029】
車両運搬装置23は、設備制御装置21から出力される車両運搬信号にしたがって車両10を定められた位置(以下、車両原位置と呼称する)へ配置する運搬装置である。なお、ターゲット移動装置22は、車両10を車両原位置へ移動させることが可能な装置であれば、従来周知の各種運搬装置を用いて良い。
【0030】
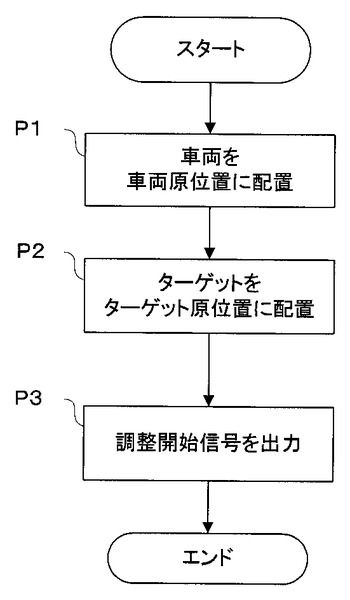
次に、図3を参照して車載レーダーの調整準備作業の手順について説明する。図3は車載レーダーの調整準備作業の手順を示すフローチャートの一例である。図3のフローチャートに示す作業は、工程P4の処理を除き調整設備20に備えられた設備制御装置21が実行する処理である。なお、以下では設備制御装置21およびレーダー制御ECU14の制御処理により、車両10に搭載された車載レーダーの調整準備作業が自動的に実行される例について説明するが、調整準備作業における各工程での作業は作業者が実行しても構わない。
【0031】
工程P1において、設備制御装置21は、車両10を車両原位置に配置させる。具体的には、設備制御装置21は、車両運搬装置23に対して車両運搬信号を出力する。車両運搬装置23は、設備制御装置21から出力される車両運搬信号にしたがって車両10を車両原位置へ移動させる。なお、車両10はIG電源がON状態であるものとし、各車載レーダーは電磁波を送出した状態であるものとする。また、車両10を車両原位置まで移動させる作業は、作業者が車両10を運転して実行しても構わない。車両10が車両原位置に配置されると、調整準備作業は、工程P2へ移行する。
【0032】
工程P2において、設備制御装置21は、ターゲット30をターゲット原位置に配置する。具体的には、設備制御装置21は、ターゲット移動装置22に対してターゲット移動信号を出力する。設備制御装置21が処理を完了すると、調整準備作業は、工程P3へ移行する。
【0033】
なお、上記に説明した工程P2におけるターゲット移動信号の出力は、設備制御装置21が工程P1の処理を完了した後に自動的に開始しても良いし、作業者が設備制御装置21を操作して当該信号の出力を開始しても良い。また、上記工程P2の説明では、ターゲット30の移動は、ターゲット移動装置22により実行される例を示したが、作業者がターゲット30をターゲット原位置まで運搬しても構わない。
【0034】
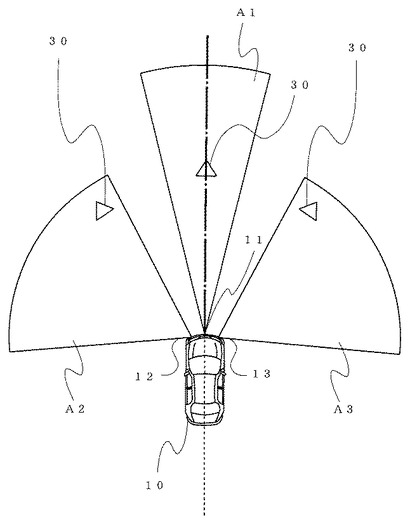
ここで、図4を参照して、車両10およびターゲット30の配置について説明する。図4は車載レーダー調整時におけるターゲット30および車両10の配置図である。前方レーダー11、左前方レーダー12、および、右前方レーダー13各々が電磁波を照射する範囲を電磁波照射範囲と呼称し、各々、図4において電磁波照射範囲A1、中電磁波照射範囲A2、中電磁波照射範囲A3として示す。図4に示すように、ターゲット30は各車載レーダーの正面、且つ、各車載レーダーの電磁波照射範囲内に各々1つずつ配置される。詳細は後述するが、各車載レーダーは、各々の正面に配置されたターゲット30を検出した方向へ基準軸を合わせて軸調整を行う。
【0035】
工程P3において、設備制御装置21は、調整開始信号を出力する。具体的には、設備制御装置21は、調整開始信号をレーダー制御ECU14へ出力する。工程P3においてレーダー制御ECU14の処理が完了すると車載レーダーの調整準備作業は全て完了する。レーダー制御ECU14は、調整開始信号を受信すると、図5に示す自動軸調整処理を実行して自動的に車載レーダーの基準軸を調整する。図5はレーダー制御ECU14により実行される処理の一例を示すフローチャートである。
【0036】
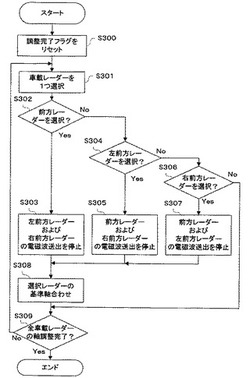
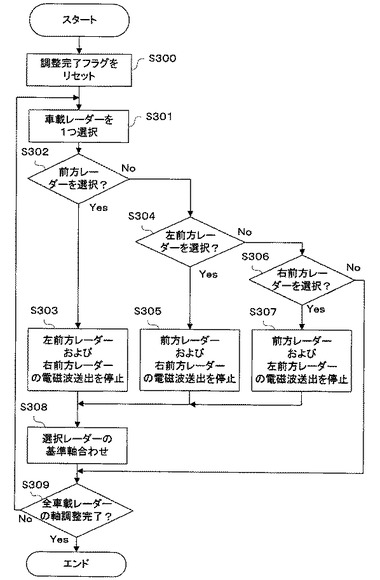
次に、図5を参照して、レーダー制御ECU14が実行する自動軸調整処理について説明する。
【0037】
ステップS300において、レーダー制御ECU14は、調整完了フラグをリセットする。調整完了フラグとは、当該フラグがオンである場合、対応する車載レーダーが調整完了済であることを示し、当該フラグがオフである場合、対応する車載レーダーが未調整であることを示すフラグである。レーダー制御ECU14は、予め車載レーダー毎に、当該車載レーダーの調整状態を示す調整完了フラグを設定し、記憶する。本ステップS301において、レーダー制御ECU14は、全ての車載レーダーの調整完了フラグをオフに設定して記憶する。レーダー制御ECU14は、ステップS300の処理を完了すると、処理をステップS301へ進める。
【0038】
ステップS301において、レーダー制御ECU14は、車載レーダーを1つ選択するなお、レーダー制御ECU14は、車載レーダーを選択する順序を予め記憶しておき、当該順序に従って車載レーダーを選択しても良い。以下、本ステップS301において選択された車載レーダーを調整対象レーダーと呼称する。レーダー制御ECU14は、ステップS301の処理を完了すると、処理をステップS302へ進める。
【0039】
ステップS302において、レーダー制御ECU14は、前方レーダー11を選択しているか否かを判定する。レーダー制御ECU14は、前方レーダー11を選択していると判定した場合、処理をステップS303へ進める。一方、レーダー制御ECU14は、前方レーダー11を選択していないと判定した場合、処理をステップS304へ進める。
【0040】
ステップS303において、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の電磁波送出を停止する。具体的には、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS303の処理を完了すると、処理をステップS308へ進める。
【0041】
ステップS304において、レーダー制御ECU14は、左前方レーダー12を選択しているか否かを判定する。レーダー制御ECU14は、左前方レーダー12を選択していると判定した場合、処理をステップS305へ進める。一方、レーダー制御ECU14は、左前方レーダー12を選択していないと判定した場合、処理をステップS306へ進める。
【0042】
ステップS305において、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の電磁波送出を停止する。具体的には、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS305の処理を完了すると、処理をステップS308へ進める。
【0043】
ステップS306において、レーダー制御ECU14は、右前方レーダー13を選択しているか否かを判定する。レーダー制御ECU14は、右前方レーダー13を選択していると判定した場合、処理をステップS307へ進める。一方、レーダー制御ECU14は、右前方レーダー13を選択していないと判定した場合、処理をステップS309へ進める。
【0044】
ステップS307において、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の電磁波送出を停止する。具体的には、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS307の処理を完了すると、処理をステップS308へ進める。
【0045】
上記ステップS302からステップS307の処理によれば、調整対象レーダー以外の車載レーダー(以下、非調整対象レーダーと呼称する)は電磁波を送出しない状態になる。
【0046】
ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを行う。具体的には、レーダー制御ECU14は、ステップS301において選択した調整対象レーダーに対して基準軸を調整する指示信号を出力する。レーダー制御ECU14から出力された基準軸を調整する指示信号を受信した調整対象レーダーは、基準軸を調整する処理を実行する。
【0047】
まず、調整対象レーダーは、当該調整対象レーダーの正面に配置されたターゲット30の検出角を取得する。そして、調整対象レーダーは、備えられた処理装置によりターゲット30の検出角の値が0となる方向に基準軸を設定する処理を行う。このようにして調整された車載レーダーの基準軸を図4において一点鎖線で示す。調整対象レーダーは、上記の処理を完了すると、基準軸を調整する処理を完了したことを示す信号(以下、調整完了信号と呼称する)をレーダー制御ECU14に対して出力する。
【0048】
レーダー制御ECU14は、調整対象レーダーから調整完了信号を受信すると、当該調整対象レーダーに対応した調整完了フラグをオンに設定して記憶する。レーダー制御ECU14は、ステップS308の処理を完了すると、処理をステップS309へ進める。
【0049】
ステップS309において、レーダー制御ECU14は、全車載レーダーの軸調整が完了したか否かを判定する。具体的には、レーダー制御ECU14は、全ての車載レーダーの調整完了フラグがオンになっているか否かを判定する。レーダー制御ECU14は、全ての車載レーダーの調整完了フラグがオンである場合、全ての車載レーダーの軸調整が完了したと判定し、自動軸調整処理を終了する。一方、レーダー制御ECU14は、車載レーダーのうち何れかの調整完了フラグがオフである場合、車載レーダーの軸調整が完了していないと判定し、処理をステップS301へ戻す。
【0050】
上記のレーダー制御ECU14の処理によれば、ステップS308において調整対象レーダーの軸調整を実行している間、非調整対象レーダーは電磁波を送出しない状態に維持される。そのため、調整対象レーダーの電磁波と、非調整対象レーダーの電磁波とが干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0051】
なお、上記第1の実施形態では、レーダー制御ECU14が、調整対象レーダーを調整する間、非調整対象レーダーの電磁波の送出を全て停止する例を示したが、レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複する非調整対象レーダーのみ電磁波の送出を停止しても構わない。すなわち、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複しない非調整対象レーダーについては、必ずしも電磁波の送出を停止する必要はない。例えば、左前方レーダー12が調整対象レーダーとして選択されている場合、左前方レーダー12の電磁波照射範囲、および右前方レーダー13の電磁波照射範囲が重複していなければ、右前方レーダー13の電磁波の送出を必ずしも停止する必要はない。
【0052】
(第2の実施形態)
上記第1の実施形態では、調整対象レーダーの軸調整を実行している間、非調整対象レーダーが電磁波を送出しない状態に維持される例について説明したが、調整対象レーダーの軸調整を実行している間、非調整対象レーダーの電磁波を送出する方向(以下、電磁波送出方向と呼称する)を変更しても構わない。非調整対象レーダーの電磁波送出方向を変更することにより、当該非調整対象レーダーの電磁波照射範囲を変更することができる。そして、非調整対象レーダーが電磁波照射範囲、調整対象レーダーが電磁波を照射する範囲と重複していなければ、調整対象レーダーの電磁波が非調整対象レーダーの電磁波と干渉することがないため、ターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0053】
第2の実施形態に係る車載レーダーを調整するシステムの構成は、第1の実施形態に係る車載レーダーを調整するシステムの構成に加えて、取付け角度変更装置をさらに備える。取付け角度変更装置以外の構成については上記第1の実施形態と同様であるので説明を省略する。
【0054】
取付角度変更装置は、車載レーダー毎に備えられ、各車載レーダーの取付け角度を各々に変更する装置である。詳細は後述するが、取付角度変更装置は、レーダー制御ECU14と接続され、レーダー制御ECU14から受信する指示信号に応じて各車載レーダーを車両に取り付けるボルトを回転させて各車載レーダーの取付け角度を変更する。以下、取付角度変更装置が車載レーダーの取付け角度を変更するしくみについて、左前方レーダー12の取付け角度を変更する場合を例として説明する。
【0055】
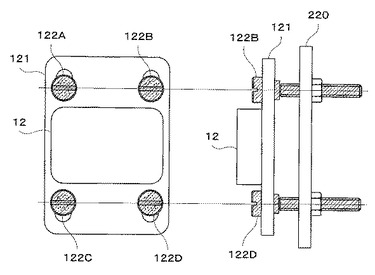
まず、図6を参照して左前方レーダー12が車両10に取付けられている様子について説明する。なお、図6は車両10に取付けられた左前方レーダー12の正面図および側面図である。図6に示すように、左前方レーダー12は略直方体形状を成す。左前方レーダー12は、電磁波を送受信する面(以下、センサ面と呼称する)を正面とした場合、背面を板状のブラケット121の一方の面と一体的に結合される。ブラケット121は、長方形の板状部材であり、当該部材を貫通する孔が四隅に形成されている。左前方レーダー12は、ブラケット121の四隅の孔を各々挿通する4本のボルト122を介し、左前方レーダー12のセンサ面を車両から外側へ向けて、定められた間隔を隔てて車両側ブラケット220に固定される。なお、車両側ブラケット220は、4本のボルト122各々と螺合するボルト孔を備え、車両10に固定されている部材である。このように、左前方レーダー12は車両側ブラケット220を介して車両10に取付けられる。なお、左前方レーダー12が車両10に取付けられた時点の取付け角度を各々の取付け原角度と呼称する。
【0056】
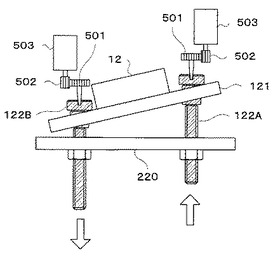
次に、取付角度変更装置が左前方レーダー12の取付け角度を変更して、様子について図7を参照して説明する。なお、図7は取付け角度を変更された左前方レーダー12の上面図である。
【0057】
取付角度変更装置は、図7に示すソケット501、ギヤ502、およびアクチュエータ503を、上記複数のボルト122毎に備える。ソケット501は、対応するボルト122と噛合する部材であり、当該ボルト122と噛合した状態で当該ボルト122と一体的に回転する。ギヤ502はソケット501へアクチュエータ503の回転力を伝達する歯車部材である。ソケット501にはギヤ502と噛合する歯が形成されており、ソケット501はギヤ502の回転に応じて回転する。アクチュエータ503はギヤ502を回転させる駆動装置である。ギヤ502はアクチュエータ503の回転部に固定され、アクチュエータ503の動作に応じて回転する。各アクチュエータ503は、レーダー制御ECU14から出力される指示信号に応じてギヤ502を回転させる。上記構成により、取付角度変更装置は、レーダー制御ECU14から受信する指示信号に応じてアクチュエータ503を動作させて上記のボルト122を締める方向、または緩める方向へ各々回転させることができる。取付角度変更装置がボルト122を各々回転させると、ブラケット121の取付け角度が変化する。
【0058】
例えば、図7に示すように、車両運転席から見て左方へ向ける場合、レーダー制御ECU14は車両運転席から見て左方へ向ける指示信号を取付角度変更装置に対して出力する。取付角度変更装置は、レーダー制御ECU14からの上記指示信号にもとづいて、各アクチュエータ503を動作させて、図6中に示すボルト122を各々回転させる。具体的には、左前方レーダー12を正面から見てブラケット121の右上を挿通するボルト122B、および、ブラケット121の右下を挿通するボルト122Dを各々締める方向へ回転させ、且つ、ブラケット121の左上を挿通するボルト122A、およびブラケット121の左下を挿通するボルト122Cを各々緩める方向へ回転させる。上記のようにボルト122を回転させた場合、図7に示すように、ブラケット121の右端はブラケット121の正面方向へ移動し、ブラケット121の左端はブラケット121の背面方向へ移動するため、左前方レーダー12と結合されたブラケット121の結合面が左方向へ回転する。その結果、左前方レーダー12のセンサ面が左方向へ向き、左前方レーダー12が電磁波を送出する方向が左方向へ回転する。すなわち、左前方レーダー12の電磁波照射範囲が、左前方レーダー12を中心として左方向へ回転移動する。なお、左前方レーダー12の電磁波照射範囲を右方向へ向ける場合、取付角度変更装置は、ボルト122A、およびボルト122Cを各々締める方向へ回転させ、且つ、ボルト122B、およびボルト122Dを各々緩める方向へ回転させる。
【0059】
上記では、左前方レーダー12の取付け角度が変更される例について説明したが、前方レーダー11および、右前方レーダー13も同様のしくみで車両10に取付けられ、取付け角度が変更される。
【0060】
次に、第2の実施形態に係るレーダー制御ECU14の処理について説明する。第2の実施形態に係るレーダー制御ECU14の処理は、ステップS303、ステップS305、ステップS307、およびステップS308の処理を除き、図5に示すフローチャートの処理と同様である。したがって、ステップS303、ステップS305、ステップS307、およびステップS308以外の処理については説明を省略し、以下、第2の実施形態に係るステップS303、ステップS305、ステップS307、およびステップS308の処理について説明する。
【0061】
ステップS303において、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、左前方レーダー12の取付角度変更装置に対して、左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。左前方レーダー12の取付角度変更装置は、レーダー制御ECU14の指示に従って左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾ける。また、レーダー制御ECU14は、右前方レーダー13の取付角度変更装置に対して、右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。右前方レーダー13の取付角度変更装置は、レーダー制御ECU14の指示に従って右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾ける。レーダー制御ECU14は、ステップS303の処理を完了すると、処理をステップS308へ進める。
【0062】
上記ステップS303の処理により、左前方レーダー12の電磁波照射範囲A2および、右前方レーダー13の電磁波照射範囲A3が、図4に示す状態から図8に示す状態に変化する。なお、図8は、第2の実施形態おいて前方レーダー11を調整する様子を示す上面図である。図8に示すように、電磁波照射範囲A2は、図4に示す状態から左前方レーダー12を中心として車両運転席から見て左方向へ回転移動している。また、電磁波照射範囲A3は、図4に示す状態から右前方レーダー13を中心として車両運転席から見て右方向へ回転移動している。このように、電磁波照射範囲A2および電磁波照射範囲A3が移動しているため、調整対象レーダーである前方レーダー11の電磁波照射範囲A1は、電磁波照射範囲A2および電磁波照射範囲A3と重複することがない。したがって、前方レーダー11から送出される電磁波は、左前方レーダー12から送出委される電磁波、および右前方レーダー13から送出される電磁波と干渉することがない。
【0063】
ステップS305において、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、前方レーダー11の取付角度変更装置に対して、前方レーダー11の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。前方レーダー11の取付角度変更装置は、レーダー制御ECU14の指示に従って前方レーダー11の取付け方向を車両運転席から見て右方向へ傾ける。また、レーダー制御ECU14は、右前方レーダー13の取付角度変更装置に対して、右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。右前方レーダー13の取付角度変更装置は、レーダー制御ECU14の指示に従って右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾ける。レーダー制御ECU14は、ステップS305の処理を完了すると、処理をステップS308へ進める。
【0064】
ステップS307において、レーダー制御ECU14は、左前方レーダー12および前方レーダー11の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、左前方レーダー12の取付角度変更装置に対して、左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。左前方レーダー12の取付角度変更装置は、レーダー制御ECU14の指示に従って左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾ける。また、レーダー制御ECU14は、前方レーダー11の取付角度変更装置に対して、前方レーダー11の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。前方レーダー11の取付角度変更装置は、レーダー制御ECU14の指示に従って前方レーダー11の取付け方向を車両運転席から見て左方向へ傾ける。レーダー制御ECU14は、ステップS307の処理を完了すると、処理をステップS308へ進める。
【0065】
ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを行う。具体的には、第1の実施形態と同様の処理を実行する。但し、第2の実施形態では、本ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを実行した後、各車載レーダーの取付け角度を原角度へ戻す。具体的には、レーダー制御ECU14は、各車載レーダーの取付角度変更装置に対して、各車載レーダーの取付け角度を原角度へ戻す指示信号を出力する。各車載レーダーの取付角度変更装置はボルト122の回転量を0にするよう、各ボルト122を回転させる。レーダー制御ECU14は、ステップS308の処理を完了すると、処理をステップS309へ進める。
【0066】
上記の第2の実施形態に係るステップS303、ステップS305、およびステップS307の処理によれば、調整対象レーダーの配置位置および調整対象レーダーの電磁波送出方向に応じて、非調整対象レーダーの電磁波送出方向が変更される。すなわち、非調整対象レーダーの電磁波照射範囲が、調整対象レーダーの電磁波照射範囲と重複しない方向へ移動する。そのため、調整対象レーダーの電磁波と、非調整対象レーダーの電磁波とが干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0067】
なお、上記第2の実施形態では、レーダー制御ECU14が、調整対象レーダーの配置位置および調整対象レーダーの電磁波送出方向に応じて、非調整対象レーダーの電磁波送出方向を変更する例について説明したが、非調整対象レーダーが電磁波を送出する方向は上記に限らない。レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と、非調整対象レーダーの電磁波照射範囲とが重複しなければ、非調整対象レーダーの電磁波送出方向を何れの方向へ変更しても良く、例えば、レーダー制御ECU14は、非調整対象レーダーの電磁波送出方向を垂直方向に変更するなどしても構わない。
【0068】
また、上記第2の実施形態では、レーダー制御ECU14が、非調整対象レーダーの電磁波送出方向を全て変更する例を示したが、レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複する非調整対象レーダーのみ電磁波送出方向を変更すれば良い。すなわち、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複しない非調整対象レーダーについては、必ずしも電磁波送出方向を変更する必要はない。
【0069】
また、上記第2の実施形態では、ボルト122を回転させて車載レーダーの取付け角度を変更する例を示したが、車載レーダーの取付け角度を変更する方法は上記に限らない。車載レーダーの電磁波送出方向を変更可能な装置であれば、他の機構や装置を代わりに備えても構わない。
【0070】
また、上記第1および第2の実施形態では、各々、レーダー制御ECU14が非調整対象レーダーから送出する電磁波を停止する処理を行う例、およびレーダー制御ECU14が非調整対象レーダーの電磁波送出方向を変更する処理を行う例について説明したが、レーダー制御ECU14は、上記処理の代わりに、非調整対象レーダーが送出する電磁波の周波数を変調する処理を行っても構わない。具体的には、各車載レーダーは送出する電磁波の周波数を変調する周波数変調装置を各々備える。周波数変調装置はレーダー制御ECU14と接続され、レーダー制御ECU14の指示に応じて、各車載レーダーから送出される電磁波の周波数を変調する。レーダー制御ECU14は、S303、ステップS305、およびステップS307の各処理において、非調整対象レーダーに対して、調整対象レーダーと異なる周波数帯域の電磁波を送出する指示を出す。このような処理によれば、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波とは、周波数帯域が異なるため、互いに干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0071】
なお、上記第1および第2の実施形態では、ステップS401からステップS409の処理において、全ての車載レーダーが順次選択されて、全ての車載レーダーの軸調整を自動的に実行する例を示したが、作業者が設備制御装置21を操作して調整する車載レーダーを個別に選択可能としても構わない。
【0072】
また、上記第1の実施形態では、レーダー制御ECU14が自動軸調整処理を実行する例について説明したが、設備制御装置21がレーダー制御ECU14の代わりに上述の自動軸調整処理を実行しても構わない。設備制御装置21が自動軸調整処理を実行する場合、レーダー制御ECU14が車両10に搭載されていない場合であっても、上記の調整方法を適用できる。
【0073】
また、上記第1および第2の実施形態では、レーダー制御ECU14が設備制御装置21に接続されて、車載レーダーの軸調整が実行される例について説明したが、設備制御装置21を搭載する調整設備が無い場合であっても上記の調整方法は適用可能である。例えば、整備工場などで車載レーダーを調整する場合、予め作業者が操作可能な小型の端末装置を用意し、当該端末装置とレーダー制御ECU14とを接続する。なお、当該端末装置は、調整開始信号の出力が可能である。そして、作業者が車両10およびターゲット30を配置した後、端末装置を用いて調整開始信号の出力操作を行えば、上記と同様の方法で車載レーダーの基準軸を調整することができる。
【0074】
また、上記第1および第2の実施形態では、車両前方に備えられた複数のレーダー装置の基準軸を調整する例について説明したが、上記レーダー装置の軸調整方法は、車両の側方や後方に備えられたレーダー装置を調整するように適用しても構わない。例えば、車両後方の障害物を監視するために、複数のレーダー装置が、車両後方中央、車両左後方、および車両右後方などに備えられた場合であっても、上記と同様にして各レーダー装置の基準軸を調整することができる。
【0075】
また、上記第1および第2の実施形態では、ステップS308の処理において、調整対象レーダーが、備えられた処理装置に記憶された処理プログラムにより基準軸を調整する処理を行う例を示したが、各車載レーダーの向きを物理的に変更して調整対象レーダーの基準軸を調整しても構わない。例えば、各車載レーダーに第2の実施形態に示した取付角度変更装置などの、車載レーダーの向きを変更する装置が備えられている場合、当該装置を制御して基準軸を調整しても構わない。
【0076】
また、上記第1および第2の実施形態では、車両10に3つの車載レーダーが備えられる例について説明したが、調整対象レーダーが軸調整をしている間、非調整対象レーダーからの電磁波の送出状態を上述の通りに変更していれば、車載レーダーの数は3つに限らない。
【0077】
また、上記第1および第2の実施形態では、レーダー装置の一例として、FM−CW方式のミリ波レーダーを用いる例について説明したが、FM−CW方式のミリ波レーダーに限らず、他の従来既知の電磁波を送受信して物体を検出するレーダー装置を用いても構わない。
【産業上の利用可能性】
【0078】
本発明は、車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法などとして有用である。
【図面の簡単な説明】
【0079】
【図1】前方レーダー11、左前方レーダー12、および、右前方レーダー13の搭載図
【図2】車載レーダーを調整するシステムの機能構成を示すブロック図
【図3】車載レーダーの調整作業の手順を示すフローチャートの一例
【図4】車載レーダー調整時におけるターゲット30および車両10の配置図
【図5】レーダー制御ECU14により実行される処理の一例を示すフローチャート
【図6】車両10に取付けられた左前方レーダー12の正面図および側面図
【図7】左方へ向いた左前方レーダー12の上面図
【図8】第2の実施形態おいて前方レーダー11を調整する様子を示す上面図
【符号の説明】
【0080】
10 車両
11 前方レーダー
12 左前方レーダー
13 右前方レーダー
14 レーダー制御ECU
20 調整設備
21 設備制御装置
22 ターゲット移動装置
23 車両運搬装置
30 ターゲット
121 ブラケット
122 ボルト
220 車両側ブラケット
501 ソケット
502 ギヤ
503 アクチュエータ
【技術分野】
【0001】
本発明は、レーダー装置の検出軸調整方法に関し、より特定的には、車両に備えられた複数のレーダー装置の検出軸を調整する方法に関する。
【背景技術】
【0002】
従来、車両周囲の物体を検出するレーダー装置、および当該レーダー装置を用いた車両の衝突防止システムが開発されている。このようなシステムに用いられるレーダー装置の一例として、ミリ波レーダー装置がある。一般的なミリ波レーダー装置は、所定の方向へ電磁波を送信する送信部と、当該電磁波の反射波を受信する受信部を備える。そして、ミリ波レーダー装置は、物体に反射された反射波にもとづいて当該物体の位置を、基準軸を基準として検出する。なお、基準軸とは、検出された物体の位置を定義するために各車載レーダーから当該車載レーダーの前方へ向けて仮想的に設定される軸線である。
【0003】
上記の通り、ミリ波レーダーは、物体の位置を基準軸にもとづいて検出する。したがって、基準軸が正しい位置に設定されていなければ、先行車や障害物など、車両周囲の物体の位置が誤って検出されてしまう場合がある。そして、車両周囲の物体の位置が誤って検出された場合、衝突防止システムなどの、当該物体の検出位置にもとづいて車両を制御するシステムが、正常に作動しなくなり、適切な車両制御が実行されなくなる恐れがある。このような問題を解決するために、ミリ波レーダーの基準軸を予め正しい位置に調整しておく必要がある。
【0004】
ミリ波レーダーの軸調整方法の一例が、特許文献1に開示されている。特許文献1に開示される軸調整方法では、電磁波反射体の多重反射像をレーダー装置により検出する。そして、多重反射像が所定の位置で検出されるようにレーダー装置の取り付け位置を調整して、基準軸を調整する。このような調整方法によれば、通常より省スペースでレーダー装置の基準軸を調整することができる。
【特許文献1】特開2007−240369号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、近年、車両周囲の物体を、より正確に、より広い範囲で検出するために複数のミリ波レーダーを備えた車両が開発されている。このような車両に搭載された複数のミリ波レーダーの基準軸を調整する場合、各ミリ波レーダーから送出される電磁波が互いに干渉して、当該電磁波の位相や強度や周波数が変化する場合がある。各ミリ波レーダーから送出された電磁波が物体に反射されて当該ミリ波レーダーに受信されるまでの間に、上記のような干渉により当該電磁波の位相や強度や周波数が変化した場合、当該ミリ波レーダーは、物体の位置を誤って検出してしまうことがある。したがって、特許文献1になど開示される従来の軸調整方法では、車両に複数のミリ波レーダーが備えられている場合、当該ミリ波レーダーにより電磁波反射体の位置を正しく検出することができず、当該ミリ波レーダーの軸調整を正しく行うことができない場合がある。
【0006】
本発明は上記課題に鑑みてなされたものであり、車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、調整対象レーダーの軸を調整する調整工程とを含み、調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出状態を変更する、レーダー装置の軸調整方法。
【0008】
調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーの電磁波の送出を停止する、請求項1に記載のレーダー装置の軸調整方法。
【0009】
調整工程において、少なくとも調整対象レーダーを調整している間、調整対象レーダーから送出される電磁波の照射範囲と非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、非調整対象レーダーが電磁波を送出する方向を変更する、請求項1に記載のレーダー装置の軸調整方法。
【0010】
軸調整工程において、少なくとも調整対象レーダーを調整している間、非調整対象レーダーから送出される電磁波の周波数を、調整対象レーダーから送出される電磁波の周波数と異なる帯域の周波数に変調する、請求項1に記載のレーダー装置の軸調整方法。
【発明の効果】
【0011】
第1の発明によれば、調整対象レーダーの軸調整を行っている間、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を防止することができる。その結果、調整対象レーダーを正しく軸調整することができる。
【0012】
第2の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を、簡単な制御処理および構成で防止することができる。
【0013】
第3の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を簡単な制御処理で防止することができる。
【0014】
第4の発明によれば、第3の発明において、容易に非調整対象レーダーが電磁波を送出する方向を変更することができる。
【0015】
第5の発明によれば、第1の発明において、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波との干渉を、簡単な制御処理および構成で防止することができる。
【発明を実施するための最良の形態】
【0016】
(第1の実施形態)
以下、本発明の実施形態に係るレーダー装置の軸調整方法について説明する。第1の実施形態では、複数のターゲット30を用いて、車両10に備えられた前方レーダー11、左前方レーダー12、および右前方レーダー13各々の基準軸を調整する例について説明する。
【0017】
前方レーダー11、左前方レーダー12、および、右前方レーダー13は、何れも典型的なFM−CW方式のミリ波レーダー装置である。以下、前方レーダー11、左前方レーダー12、および、右前方レーダー13を総称して車載レーダーと呼称する。車載レーダーは電磁波を送出し、物体から反射された当該電磁波を受信して、当該物体の水平方向の位置を検出する。各車載レーダーは、物体までの距離を上記送信波の周波数と反射波の周波数との差異にもとづいて検出する。また、各車載レーダーは、物体が存在する方向を示す角度(以下、検出角と呼称する)を反射波の位相にもとづいて検出する。検出角は、当該検出を行う車載レーダーの基準軸と、物体および当該車載レーダーの受信部を結ぶ直線とが成す角度である。基準軸とは、検出角を上記の通り定義するために各車載レーダーから当該車載レーダーの前方へ向けて仮想的に設定される軸線(図4中の1点鎖線)である。各車載レーダーは、基準軸を調整する処理プログラムを記憶した処理装置を備え、レーダー制御ECU14の指示に応じて、当該処理装置により基準軸を調整する。
【0018】
ターゲット30は、車載レーダーから送出される電磁波を反射する反射体である。ターゲット30は、1面を開口した正四面体形状を成し、当該正四面体の各面は、アルミ板により構成される。ターゲット30は、各車載レーダーから開口部が見えるように配置される。なお、車載レーダーから送信される電磁波を良好に反射可能であれば、ターゲット30の形状および構成材料は上記に限らない。
【0019】
図1に示すように、車両10には、前方レーダー11、左前方レーダー12、および、右前方レーダー13の3つのレーダー装置が備えられる。図1は、前方レーダー11、左前方レーダー12、および、右前方レーダー13の搭載図である。前方レーダー11は、車両10の前方中央のフロントグリル内側に配置される。また、左前方レーダー12は、車両10のフロントバンパー左端に配置される。また、右前方レーダー13は、車両10のフロントバンパー左端に配置される。このようにして、前方レーダー11は車両10を前後に貫通する中心線上に配置され、左前方レーダー12および右前方レーダー13は各々当該中心線を中心として左右略対称に配置される。
【0020】
次に、図2を参照して、車載レーダーを調整するシステムの機能構成について説明する。図2は、車載レーダーを調整するシステムの機能構成を示すブロック図である。
【0021】
車両10は、前方レーダー11、左前方レーダー12、右前方レーダー13、およびレーダー制御ECU14を備える。各車載レーダー、およびレーダー制御ECU14は、何れも車両10のIG電源がON状態である場合に動作する。すなわち、車両10のIG電源がON状態である場合、各車載レーダーは、電磁波を送出する状態となる。
【0022】
前方レーダー11、左前方レーダー12、および、右前方レーダー13は、各々レーダー制御ECU14に接続される。そして、各車載レーダーは、レーダー制御ECU14へ出力する。
【0023】
レーダー制御ECU14は、典型的には、CPU(Central Processing Unit:中央処理装置)などの情報処理装置、メモリなどの記憶装置、およびインターフェース回路などを備える制御装置である。レーダー制御ECU14は、設備制御装置21に接続される。
【0024】
レーダー制御ECU14は、各車載レーダーに対して、電磁波の送出状態を指示する指示信号、および、基準軸を調整する指示信号を出力する。
【0025】
調整設備20は、設備制御装置21、ターゲット移動装置22、および車両運搬装置23を備える設備である。
【0026】
設備制御装置21は、典型的には、CPUなどの情報処理装置、メモリなどの記憶装置、インターフェース回路、および操作盤などを備える制御装置である。設備制御装置21は、レーダー制御ECU14、ターゲット移動装置22、および車両運搬装置23と各々接続される。
【0027】
設備制御装置21は、レーダー制御ECU14に対して車載レーダーの調整を開始する指示信号(以下、調整開始信号と呼称する)を出力する。また、設備制御装置21は、ターゲット移動装置22に対してターゲット30を移動する指示信号(以下、ターゲット移動信号と呼称する)を出力する。また、設備制御装置21は、車両運搬装置23に対して車両10を移動する指示信号(以下、車両運搬信号と呼称する)を出力する。なお、作業者は、設備制御装置21を操作して、上記の調整開始信号およびターゲット移動信号を任意に出力させることができる。
【0028】
ターゲット移動装置22は、設備制御装置21から出力されるターゲット移動信号にしたがってターゲット30を定められた位置(以下、ターゲット原位置と呼称する)へ移動させる移動装置である。ターゲット移動装置22は、典型的には、ターゲット30を移動部位に備え付けた既知の位置決め装置である。なお、ターゲット移動装置22は、ターゲット30をターゲット原位置へ移動させることが可能な装置であれば、従来周知の各種移動装置を用いて良い。
【0029】
車両運搬装置23は、設備制御装置21から出力される車両運搬信号にしたがって車両10を定められた位置(以下、車両原位置と呼称する)へ配置する運搬装置である。なお、ターゲット移動装置22は、車両10を車両原位置へ移動させることが可能な装置であれば、従来周知の各種運搬装置を用いて良い。
【0030】
次に、図3を参照して車載レーダーの調整準備作業の手順について説明する。図3は車載レーダーの調整準備作業の手順を示すフローチャートの一例である。図3のフローチャートに示す作業は、工程P4の処理を除き調整設備20に備えられた設備制御装置21が実行する処理である。なお、以下では設備制御装置21およびレーダー制御ECU14の制御処理により、車両10に搭載された車載レーダーの調整準備作業が自動的に実行される例について説明するが、調整準備作業における各工程での作業は作業者が実行しても構わない。
【0031】
工程P1において、設備制御装置21は、車両10を車両原位置に配置させる。具体的には、設備制御装置21は、車両運搬装置23に対して車両運搬信号を出力する。車両運搬装置23は、設備制御装置21から出力される車両運搬信号にしたがって車両10を車両原位置へ移動させる。なお、車両10はIG電源がON状態であるものとし、各車載レーダーは電磁波を送出した状態であるものとする。また、車両10を車両原位置まで移動させる作業は、作業者が車両10を運転して実行しても構わない。車両10が車両原位置に配置されると、調整準備作業は、工程P2へ移行する。
【0032】
工程P2において、設備制御装置21は、ターゲット30をターゲット原位置に配置する。具体的には、設備制御装置21は、ターゲット移動装置22に対してターゲット移動信号を出力する。設備制御装置21が処理を完了すると、調整準備作業は、工程P3へ移行する。
【0033】
なお、上記に説明した工程P2におけるターゲット移動信号の出力は、設備制御装置21が工程P1の処理を完了した後に自動的に開始しても良いし、作業者が設備制御装置21を操作して当該信号の出力を開始しても良い。また、上記工程P2の説明では、ターゲット30の移動は、ターゲット移動装置22により実行される例を示したが、作業者がターゲット30をターゲット原位置まで運搬しても構わない。
【0034】
ここで、図4を参照して、車両10およびターゲット30の配置について説明する。図4は車載レーダー調整時におけるターゲット30および車両10の配置図である。前方レーダー11、左前方レーダー12、および、右前方レーダー13各々が電磁波を照射する範囲を電磁波照射範囲と呼称し、各々、図4において電磁波照射範囲A1、中電磁波照射範囲A2、中電磁波照射範囲A3として示す。図4に示すように、ターゲット30は各車載レーダーの正面、且つ、各車載レーダーの電磁波照射範囲内に各々1つずつ配置される。詳細は後述するが、各車載レーダーは、各々の正面に配置されたターゲット30を検出した方向へ基準軸を合わせて軸調整を行う。
【0035】
工程P3において、設備制御装置21は、調整開始信号を出力する。具体的には、設備制御装置21は、調整開始信号をレーダー制御ECU14へ出力する。工程P3においてレーダー制御ECU14の処理が完了すると車載レーダーの調整準備作業は全て完了する。レーダー制御ECU14は、調整開始信号を受信すると、図5に示す自動軸調整処理を実行して自動的に車載レーダーの基準軸を調整する。図5はレーダー制御ECU14により実行される処理の一例を示すフローチャートである。
【0036】
次に、図5を参照して、レーダー制御ECU14が実行する自動軸調整処理について説明する。
【0037】
ステップS300において、レーダー制御ECU14は、調整完了フラグをリセットする。調整完了フラグとは、当該フラグがオンである場合、対応する車載レーダーが調整完了済であることを示し、当該フラグがオフである場合、対応する車載レーダーが未調整であることを示すフラグである。レーダー制御ECU14は、予め車載レーダー毎に、当該車載レーダーの調整状態を示す調整完了フラグを設定し、記憶する。本ステップS301において、レーダー制御ECU14は、全ての車載レーダーの調整完了フラグをオフに設定して記憶する。レーダー制御ECU14は、ステップS300の処理を完了すると、処理をステップS301へ進める。
【0038】
ステップS301において、レーダー制御ECU14は、車載レーダーを1つ選択するなお、レーダー制御ECU14は、車載レーダーを選択する順序を予め記憶しておき、当該順序に従って車載レーダーを選択しても良い。以下、本ステップS301において選択された車載レーダーを調整対象レーダーと呼称する。レーダー制御ECU14は、ステップS301の処理を完了すると、処理をステップS302へ進める。
【0039】
ステップS302において、レーダー制御ECU14は、前方レーダー11を選択しているか否かを判定する。レーダー制御ECU14は、前方レーダー11を選択していると判定した場合、処理をステップS303へ進める。一方、レーダー制御ECU14は、前方レーダー11を選択していないと判定した場合、処理をステップS304へ進める。
【0040】
ステップS303において、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の電磁波送出を停止する。具体的には、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS303の処理を完了すると、処理をステップS308へ進める。
【0041】
ステップS304において、レーダー制御ECU14は、左前方レーダー12を選択しているか否かを判定する。レーダー制御ECU14は、左前方レーダー12を選択していると判定した場合、処理をステップS305へ進める。一方、レーダー制御ECU14は、左前方レーダー12を選択していないと判定した場合、処理をステップS306へ進める。
【0042】
ステップS305において、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の電磁波送出を停止する。具体的には、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS305の処理を完了すると、処理をステップS308へ進める。
【0043】
ステップS306において、レーダー制御ECU14は、右前方レーダー13を選択しているか否かを判定する。レーダー制御ECU14は、右前方レーダー13を選択していると判定した場合、処理をステップS307へ進める。一方、レーダー制御ECU14は、右前方レーダー13を選択していないと判定した場合、処理をステップS309へ進める。
【0044】
ステップS307において、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の電磁波送出を停止する。具体的には、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の何れかが電磁波を送出しているか否かを判定する。そして、レーダー制御ECU14は、前方レーダー11および左前方レーダー12の何れかが電磁波を送出していると判定した場合、電磁波の送出を停止させる指示信号を、電磁波を送出していると判定した車載レーダーに対して出力する。また、レーダー制御ECU14は、電磁波の送出を既に停止している車載レーダーに対しては、電磁波送出を停止した状態を維持する指示信号を出力する。レーダー制御ECU14は、ステップS307の処理を完了すると、処理をステップS308へ進める。
【0045】
上記ステップS302からステップS307の処理によれば、調整対象レーダー以外の車載レーダー(以下、非調整対象レーダーと呼称する)は電磁波を送出しない状態になる。
【0046】
ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを行う。具体的には、レーダー制御ECU14は、ステップS301において選択した調整対象レーダーに対して基準軸を調整する指示信号を出力する。レーダー制御ECU14から出力された基準軸を調整する指示信号を受信した調整対象レーダーは、基準軸を調整する処理を実行する。
【0047】
まず、調整対象レーダーは、当該調整対象レーダーの正面に配置されたターゲット30の検出角を取得する。そして、調整対象レーダーは、備えられた処理装置によりターゲット30の検出角の値が0となる方向に基準軸を設定する処理を行う。このようにして調整された車載レーダーの基準軸を図4において一点鎖線で示す。調整対象レーダーは、上記の処理を完了すると、基準軸を調整する処理を完了したことを示す信号(以下、調整完了信号と呼称する)をレーダー制御ECU14に対して出力する。
【0048】
レーダー制御ECU14は、調整対象レーダーから調整完了信号を受信すると、当該調整対象レーダーに対応した調整完了フラグをオンに設定して記憶する。レーダー制御ECU14は、ステップS308の処理を完了すると、処理をステップS309へ進める。
【0049】
ステップS309において、レーダー制御ECU14は、全車載レーダーの軸調整が完了したか否かを判定する。具体的には、レーダー制御ECU14は、全ての車載レーダーの調整完了フラグがオンになっているか否かを判定する。レーダー制御ECU14は、全ての車載レーダーの調整完了フラグがオンである場合、全ての車載レーダーの軸調整が完了したと判定し、自動軸調整処理を終了する。一方、レーダー制御ECU14は、車載レーダーのうち何れかの調整完了フラグがオフである場合、車載レーダーの軸調整が完了していないと判定し、処理をステップS301へ戻す。
【0050】
上記のレーダー制御ECU14の処理によれば、ステップS308において調整対象レーダーの軸調整を実行している間、非調整対象レーダーは電磁波を送出しない状態に維持される。そのため、調整対象レーダーの電磁波と、非調整対象レーダーの電磁波とが干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0051】
なお、上記第1の実施形態では、レーダー制御ECU14が、調整対象レーダーを調整する間、非調整対象レーダーの電磁波の送出を全て停止する例を示したが、レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複する非調整対象レーダーのみ電磁波の送出を停止しても構わない。すなわち、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複しない非調整対象レーダーについては、必ずしも電磁波の送出を停止する必要はない。例えば、左前方レーダー12が調整対象レーダーとして選択されている場合、左前方レーダー12の電磁波照射範囲、および右前方レーダー13の電磁波照射範囲が重複していなければ、右前方レーダー13の電磁波の送出を必ずしも停止する必要はない。
【0052】
(第2の実施形態)
上記第1の実施形態では、調整対象レーダーの軸調整を実行している間、非調整対象レーダーが電磁波を送出しない状態に維持される例について説明したが、調整対象レーダーの軸調整を実行している間、非調整対象レーダーの電磁波を送出する方向(以下、電磁波送出方向と呼称する)を変更しても構わない。非調整対象レーダーの電磁波送出方向を変更することにより、当該非調整対象レーダーの電磁波照射範囲を変更することができる。そして、非調整対象レーダーが電磁波照射範囲、調整対象レーダーが電磁波を照射する範囲と重複していなければ、調整対象レーダーの電磁波が非調整対象レーダーの電磁波と干渉することがないため、ターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0053】
第2の実施形態に係る車載レーダーを調整するシステムの構成は、第1の実施形態に係る車載レーダーを調整するシステムの構成に加えて、取付け角度変更装置をさらに備える。取付け角度変更装置以外の構成については上記第1の実施形態と同様であるので説明を省略する。
【0054】
取付角度変更装置は、車載レーダー毎に備えられ、各車載レーダーの取付け角度を各々に変更する装置である。詳細は後述するが、取付角度変更装置は、レーダー制御ECU14と接続され、レーダー制御ECU14から受信する指示信号に応じて各車載レーダーを車両に取り付けるボルトを回転させて各車載レーダーの取付け角度を変更する。以下、取付角度変更装置が車載レーダーの取付け角度を変更するしくみについて、左前方レーダー12の取付け角度を変更する場合を例として説明する。
【0055】
まず、図6を参照して左前方レーダー12が車両10に取付けられている様子について説明する。なお、図6は車両10に取付けられた左前方レーダー12の正面図および側面図である。図6に示すように、左前方レーダー12は略直方体形状を成す。左前方レーダー12は、電磁波を送受信する面(以下、センサ面と呼称する)を正面とした場合、背面を板状のブラケット121の一方の面と一体的に結合される。ブラケット121は、長方形の板状部材であり、当該部材を貫通する孔が四隅に形成されている。左前方レーダー12は、ブラケット121の四隅の孔を各々挿通する4本のボルト122を介し、左前方レーダー12のセンサ面を車両から外側へ向けて、定められた間隔を隔てて車両側ブラケット220に固定される。なお、車両側ブラケット220は、4本のボルト122各々と螺合するボルト孔を備え、車両10に固定されている部材である。このように、左前方レーダー12は車両側ブラケット220を介して車両10に取付けられる。なお、左前方レーダー12が車両10に取付けられた時点の取付け角度を各々の取付け原角度と呼称する。
【0056】
次に、取付角度変更装置が左前方レーダー12の取付け角度を変更して、様子について図7を参照して説明する。なお、図7は取付け角度を変更された左前方レーダー12の上面図である。
【0057】
取付角度変更装置は、図7に示すソケット501、ギヤ502、およびアクチュエータ503を、上記複数のボルト122毎に備える。ソケット501は、対応するボルト122と噛合する部材であり、当該ボルト122と噛合した状態で当該ボルト122と一体的に回転する。ギヤ502はソケット501へアクチュエータ503の回転力を伝達する歯車部材である。ソケット501にはギヤ502と噛合する歯が形成されており、ソケット501はギヤ502の回転に応じて回転する。アクチュエータ503はギヤ502を回転させる駆動装置である。ギヤ502はアクチュエータ503の回転部に固定され、アクチュエータ503の動作に応じて回転する。各アクチュエータ503は、レーダー制御ECU14から出力される指示信号に応じてギヤ502を回転させる。上記構成により、取付角度変更装置は、レーダー制御ECU14から受信する指示信号に応じてアクチュエータ503を動作させて上記のボルト122を締める方向、または緩める方向へ各々回転させることができる。取付角度変更装置がボルト122を各々回転させると、ブラケット121の取付け角度が変化する。
【0058】
例えば、図7に示すように、車両運転席から見て左方へ向ける場合、レーダー制御ECU14は車両運転席から見て左方へ向ける指示信号を取付角度変更装置に対して出力する。取付角度変更装置は、レーダー制御ECU14からの上記指示信号にもとづいて、各アクチュエータ503を動作させて、図6中に示すボルト122を各々回転させる。具体的には、左前方レーダー12を正面から見てブラケット121の右上を挿通するボルト122B、および、ブラケット121の右下を挿通するボルト122Dを各々締める方向へ回転させ、且つ、ブラケット121の左上を挿通するボルト122A、およびブラケット121の左下を挿通するボルト122Cを各々緩める方向へ回転させる。上記のようにボルト122を回転させた場合、図7に示すように、ブラケット121の右端はブラケット121の正面方向へ移動し、ブラケット121の左端はブラケット121の背面方向へ移動するため、左前方レーダー12と結合されたブラケット121の結合面が左方向へ回転する。その結果、左前方レーダー12のセンサ面が左方向へ向き、左前方レーダー12が電磁波を送出する方向が左方向へ回転する。すなわち、左前方レーダー12の電磁波照射範囲が、左前方レーダー12を中心として左方向へ回転移動する。なお、左前方レーダー12の電磁波照射範囲を右方向へ向ける場合、取付角度変更装置は、ボルト122A、およびボルト122Cを各々締める方向へ回転させ、且つ、ボルト122B、およびボルト122Dを各々緩める方向へ回転させる。
【0059】
上記では、左前方レーダー12の取付け角度が変更される例について説明したが、前方レーダー11および、右前方レーダー13も同様のしくみで車両10に取付けられ、取付け角度が変更される。
【0060】
次に、第2の実施形態に係るレーダー制御ECU14の処理について説明する。第2の実施形態に係るレーダー制御ECU14の処理は、ステップS303、ステップS305、ステップS307、およびステップS308の処理を除き、図5に示すフローチャートの処理と同様である。したがって、ステップS303、ステップS305、ステップS307、およびステップS308以外の処理については説明を省略し、以下、第2の実施形態に係るステップS303、ステップS305、ステップS307、およびステップS308の処理について説明する。
【0061】
ステップS303において、レーダー制御ECU14は、左前方レーダー12および右前方レーダー13の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、左前方レーダー12の取付角度変更装置に対して、左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。左前方レーダー12の取付角度変更装置は、レーダー制御ECU14の指示に従って左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾ける。また、レーダー制御ECU14は、右前方レーダー13の取付角度変更装置に対して、右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。右前方レーダー13の取付角度変更装置は、レーダー制御ECU14の指示に従って右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾ける。レーダー制御ECU14は、ステップS303の処理を完了すると、処理をステップS308へ進める。
【0062】
上記ステップS303の処理により、左前方レーダー12の電磁波照射範囲A2および、右前方レーダー13の電磁波照射範囲A3が、図4に示す状態から図8に示す状態に変化する。なお、図8は、第2の実施形態おいて前方レーダー11を調整する様子を示す上面図である。図8に示すように、電磁波照射範囲A2は、図4に示す状態から左前方レーダー12を中心として車両運転席から見て左方向へ回転移動している。また、電磁波照射範囲A3は、図4に示す状態から右前方レーダー13を中心として車両運転席から見て右方向へ回転移動している。このように、電磁波照射範囲A2および電磁波照射範囲A3が移動しているため、調整対象レーダーである前方レーダー11の電磁波照射範囲A1は、電磁波照射範囲A2および電磁波照射範囲A3と重複することがない。したがって、前方レーダー11から送出される電磁波は、左前方レーダー12から送出委される電磁波、および右前方レーダー13から送出される電磁波と干渉することがない。
【0063】
ステップS305において、レーダー制御ECU14は、前方レーダー11および右前方レーダー13の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、前方レーダー11の取付角度変更装置に対して、前方レーダー11の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。前方レーダー11の取付角度変更装置は、レーダー制御ECU14の指示に従って前方レーダー11の取付け方向を車両運転席から見て右方向へ傾ける。また、レーダー制御ECU14は、右前方レーダー13の取付角度変更装置に対して、右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾けるよう指示する。右前方レーダー13の取付角度変更装置は、レーダー制御ECU14の指示に従って右前方レーダー13の取付け方向を車両運転席から見て右方向へ傾ける。レーダー制御ECU14は、ステップS305の処理を完了すると、処理をステップS308へ進める。
【0064】
ステップS307において、レーダー制御ECU14は、左前方レーダー12および前方レーダー11の電磁波送出方向を変更する。具体的には、レーダー制御ECU14は、左前方レーダー12の取付角度変更装置に対して、左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。左前方レーダー12の取付角度変更装置は、レーダー制御ECU14の指示に従って左前方レーダー12の取付け方向を車両運転席から見て左方向へ傾ける。また、レーダー制御ECU14は、前方レーダー11の取付角度変更装置に対して、前方レーダー11の取付け方向を車両運転席から見て左方向へ傾けるよう指示する。前方レーダー11の取付角度変更装置は、レーダー制御ECU14の指示に従って前方レーダー11の取付け方向を車両運転席から見て左方向へ傾ける。レーダー制御ECU14は、ステップS307の処理を完了すると、処理をステップS308へ進める。
【0065】
ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを行う。具体的には、第1の実施形態と同様の処理を実行する。但し、第2の実施形態では、本ステップS308において、レーダー制御ECU14は、調整対象レーダーの基準軸合わせを実行した後、各車載レーダーの取付け角度を原角度へ戻す。具体的には、レーダー制御ECU14は、各車載レーダーの取付角度変更装置に対して、各車載レーダーの取付け角度を原角度へ戻す指示信号を出力する。各車載レーダーの取付角度変更装置はボルト122の回転量を0にするよう、各ボルト122を回転させる。レーダー制御ECU14は、ステップS308の処理を完了すると、処理をステップS309へ進める。
【0066】
上記の第2の実施形態に係るステップS303、ステップS305、およびステップS307の処理によれば、調整対象レーダーの配置位置および調整対象レーダーの電磁波送出方向に応じて、非調整対象レーダーの電磁波送出方向が変更される。すなわち、非調整対象レーダーの電磁波照射範囲が、調整対象レーダーの電磁波照射範囲と重複しない方向へ移動する。そのため、調整対象レーダーの電磁波と、非調整対象レーダーの電磁波とが干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0067】
なお、上記第2の実施形態では、レーダー制御ECU14が、調整対象レーダーの配置位置および調整対象レーダーの電磁波送出方向に応じて、非調整対象レーダーの電磁波送出方向を変更する例について説明したが、非調整対象レーダーが電磁波を送出する方向は上記に限らない。レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と、非調整対象レーダーの電磁波照射範囲とが重複しなければ、非調整対象レーダーの電磁波送出方向を何れの方向へ変更しても良く、例えば、レーダー制御ECU14は、非調整対象レーダーの電磁波送出方向を垂直方向に変更するなどしても構わない。
【0068】
また、上記第2の実施形態では、レーダー制御ECU14が、非調整対象レーダーの電磁波送出方向を全て変更する例を示したが、レーダー制御ECU14は、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複する非調整対象レーダーのみ電磁波送出方向を変更すれば良い。すなわち、調整対象レーダーの電磁波照射範囲と電磁波照射範囲が重複しない非調整対象レーダーについては、必ずしも電磁波送出方向を変更する必要はない。
【0069】
また、上記第2の実施形態では、ボルト122を回転させて車載レーダーの取付け角度を変更する例を示したが、車載レーダーの取付け角度を変更する方法は上記に限らない。車載レーダーの電磁波送出方向を変更可能な装置であれば、他の機構や装置を代わりに備えても構わない。
【0070】
また、上記第1および第2の実施形態では、各々、レーダー制御ECU14が非調整対象レーダーから送出する電磁波を停止する処理を行う例、およびレーダー制御ECU14が非調整対象レーダーの電磁波送出方向を変更する処理を行う例について説明したが、レーダー制御ECU14は、上記処理の代わりに、非調整対象レーダーが送出する電磁波の周波数を変調する処理を行っても構わない。具体的には、各車載レーダーは送出する電磁波の周波数を変調する周波数変調装置を各々備える。周波数変調装置はレーダー制御ECU14と接続され、レーダー制御ECU14の指示に応じて、各車載レーダーから送出される電磁波の周波数を変調する。レーダー制御ECU14は、S303、ステップS305、およびステップS307の各処理において、非調整対象レーダーに対して、調整対象レーダーと異なる周波数帯域の電磁波を送出する指示を出す。このような処理によれば、調整対象レーダーが送出する電磁波と、非調整対象レーダーが送出する電磁波とは、周波数帯域が異なるため、互いに干渉することがなく、調整対象レーダーはターゲット30の位置を正しく検出することができる。したがって、調整対象レーダーを正しく軸調整することが可能となる。
【0071】
なお、上記第1および第2の実施形態では、ステップS401からステップS409の処理において、全ての車載レーダーが順次選択されて、全ての車載レーダーの軸調整を自動的に実行する例を示したが、作業者が設備制御装置21を操作して調整する車載レーダーを個別に選択可能としても構わない。
【0072】
また、上記第1の実施形態では、レーダー制御ECU14が自動軸調整処理を実行する例について説明したが、設備制御装置21がレーダー制御ECU14の代わりに上述の自動軸調整処理を実行しても構わない。設備制御装置21が自動軸調整処理を実行する場合、レーダー制御ECU14が車両10に搭載されていない場合であっても、上記の調整方法を適用できる。
【0073】
また、上記第1および第2の実施形態では、レーダー制御ECU14が設備制御装置21に接続されて、車載レーダーの軸調整が実行される例について説明したが、設備制御装置21を搭載する調整設備が無い場合であっても上記の調整方法は適用可能である。例えば、整備工場などで車載レーダーを調整する場合、予め作業者が操作可能な小型の端末装置を用意し、当該端末装置とレーダー制御ECU14とを接続する。なお、当該端末装置は、調整開始信号の出力が可能である。そして、作業者が車両10およびターゲット30を配置した後、端末装置を用いて調整開始信号の出力操作を行えば、上記と同様の方法で車載レーダーの基準軸を調整することができる。
【0074】
また、上記第1および第2の実施形態では、車両前方に備えられた複数のレーダー装置の基準軸を調整する例について説明したが、上記レーダー装置の軸調整方法は、車両の側方や後方に備えられたレーダー装置を調整するように適用しても構わない。例えば、車両後方の障害物を監視するために、複数のレーダー装置が、車両後方中央、車両左後方、および車両右後方などに備えられた場合であっても、上記と同様にして各レーダー装置の基準軸を調整することができる。
【0075】
また、上記第1および第2の実施形態では、ステップS308の処理において、調整対象レーダーが、備えられた処理装置に記憶された処理プログラムにより基準軸を調整する処理を行う例を示したが、各車載レーダーの向きを物理的に変更して調整対象レーダーの基準軸を調整しても構わない。例えば、各車載レーダーに第2の実施形態に示した取付角度変更装置などの、車載レーダーの向きを変更する装置が備えられている場合、当該装置を制御して基準軸を調整しても構わない。
【0076】
また、上記第1および第2の実施形態では、車両10に3つの車載レーダーが備えられる例について説明したが、調整対象レーダーが軸調整をしている間、非調整対象レーダーからの電磁波の送出状態を上述の通りに変更していれば、車載レーダーの数は3つに限らない。
【0077】
また、上記第1および第2の実施形態では、レーダー装置の一例として、FM−CW方式のミリ波レーダーを用いる例について説明したが、FM−CW方式のミリ波レーダーに限らず、他の従来既知の電磁波を送受信して物体を検出するレーダー装置を用いても構わない。
【産業上の利用可能性】
【0078】
本発明は、車両に備えられた複数のレーダー装置各々の基準軸を正しく調整可能とするレーダー装置の軸調整方法などとして有用である。
【図面の簡単な説明】
【0079】
【図1】前方レーダー11、左前方レーダー12、および、右前方レーダー13の搭載図
【図2】車載レーダーを調整するシステムの機能構成を示すブロック図
【図3】車載レーダーの調整作業の手順を示すフローチャートの一例
【図4】車載レーダー調整時におけるターゲット30および車両10の配置図
【図5】レーダー制御ECU14により実行される処理の一例を示すフローチャート
【図6】車両10に取付けられた左前方レーダー12の正面図および側面図
【図7】左方へ向いた左前方レーダー12の上面図
【図8】第2の実施形態おいて前方レーダー11を調整する様子を示す上面図
【符号の説明】
【0080】
10 車両
11 前方レーダー
12 左前方レーダー
13 右前方レーダー
14 レーダー制御ECU
20 調整設備
21 設備制御装置
22 ターゲット移動装置
23 車両運搬装置
30 ターゲット
121 ブラケット
122 ボルト
220 車両側ブラケット
501 ソケット
502 ギヤ
503 アクチュエータ
【特許請求の範囲】
【請求項1】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、前記レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、
前記複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、
前記調整対象レーダーから送出される電磁波の反射波を当該調整対象レーダーによって受信し、当該受信された反射波に基づいて当該調整対象レーダーの軸を調整する調整工程と、
少なくとも前記調整工程において前記調整対象レーダーが調整されている間、前記非調整対象レーダーから送出される電磁波が前記軸調整工程における前記調整対象レーダーの軸調整に影響を及ぼさないように、前記非調整対象レーダーの電磁波の送出状態を制御する送出状態変更工程を含み、
前記レーダー選択工程、前記調整工程および前記送出状態変更工程を繰り返すことによって前記複数のレーダー装置の軸を順次調整する、レーダー装置の軸調整方法。
【請求項2】
前記送出状態変更工程において、前記非調整対象レーダーの電磁波の送出を停止する、請求項1に記載のレーダー装置の軸調整方法。
【請求項3】
前記送出状態変更工程において、前記調整対象レーダーから送出される電磁波の照射範囲と前記非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、前記非調整対象レーダーが電磁波を送出する方向を変更する、請求項1に記載のレーダー装置の軸調整方法。
【請求項4】
前記送出状態変更工程において、前記非調整対象レーダーの取付け角度を変更して当該非調整対象レーダーが電磁波を送出する方向を変更する、請求項3に記載のレーダー装置の軸調整方法。
【請求項5】
前記送出状態変更工程において、前記非調整対象レーダーから送出される電磁波の周波数を、前記調整対象レーダーから送出される電磁波の周波数と異なる帯域に変調する、請求項1に記載のレーダー装置の軸調整方法。
【請求項6】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、前記レーダー装置各々の軸を調整するレーダー装置の軸調整装置であって、
前記複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択部と、
前記調整対象レーダーの軸を調整する調整部と、
少なくとも前記調整部において前記調整対象レーダーが調整されている間、非調整対象レーダーの電磁波の送出状態を変更する送出状態変更部を含む、レーダー装置の軸調整装置。
【請求項7】
前記送出状態変更部は、前記非調整対象レーダーの電磁波の送出を停止する、請求項6に記載のレーダー装置の軸調整装置。
【請求項8】
前記送出状態変更部は、前記調整対象レーダーから送出される電磁波の照射範囲と非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、前記非調整対象レーダーが電磁波を送出する方向を変更する、請求項6に記載のレーダー装置の軸調整装置。
【請求項9】
前記非調整対象レーダーの取付け角度を変更する取付け角度変更部をさらに備え、
前記送出状態変更部は、前記非調整対象レーダーの取付け角度を変更して非調整対象レーダーが電磁波を送出する方向を変更する、請求項8に記載のレーダー装置の軸調整装置。
【請求項10】
前記送出状態変更部は、前記非調整対象レーダーから送出される電磁波の周波数を、前記調整対象レーダーから送出される電磁波の周波数と異なる帯域に変調する、請求項6に記載のレーダー装置の軸調整装置。
【請求項1】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、前記レーダー装置各々の軸を調整するレーダー装置の軸調整方法であって、
前記複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択工程と、
前記調整対象レーダーから送出される電磁波の反射波を当該調整対象レーダーによって受信し、当該受信された反射波に基づいて当該調整対象レーダーの軸を調整する調整工程と、
少なくとも前記調整工程において前記調整対象レーダーが調整されている間、前記非調整対象レーダーから送出される電磁波が前記軸調整工程における前記調整対象レーダーの軸調整に影響を及ぼさないように、前記非調整対象レーダーの電磁波の送出状態を制御する送出状態変更工程を含み、
前記レーダー選択工程、前記調整工程および前記送出状態変更工程を繰り返すことによって前記複数のレーダー装置の軸を順次調整する、レーダー装置の軸調整方法。
【請求項2】
前記送出状態変更工程において、前記非調整対象レーダーの電磁波の送出を停止する、請求項1に記載のレーダー装置の軸調整方法。
【請求項3】
前記送出状態変更工程において、前記調整対象レーダーから送出される電磁波の照射範囲と前記非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、前記非調整対象レーダーが電磁波を送出する方向を変更する、請求項1に記載のレーダー装置の軸調整方法。
【請求項4】
前記送出状態変更工程において、前記非調整対象レーダーの取付け角度を変更して当該非調整対象レーダーが電磁波を送出する方向を変更する、請求項3に記載のレーダー装置の軸調整方法。
【請求項5】
前記送出状態変更工程において、前記非調整対象レーダーから送出される電磁波の周波数を、前記調整対象レーダーから送出される電磁波の周波数と異なる帯域に変調する、請求項1に記載のレーダー装置の軸調整方法。
【請求項6】
電磁波を送出し、当該電磁波の反射波を受信して、物体の位置情報を取得するレーダー装置を複数搭載した車両において、前記レーダー装置各々の軸を調整するレーダー装置の軸調整装置であって、
前記複数のレーダー装置のうち何れか1つのレーダー装置を調整対象レーダーとして選択し、当該調整対象レーダー以外のレーダー装置を非調整対象レーダーとして区別するレーダー選択部と、
前記調整対象レーダーの軸を調整する調整部と、
少なくとも前記調整部において前記調整対象レーダーが調整されている間、非調整対象レーダーの電磁波の送出状態を変更する送出状態変更部を含む、レーダー装置の軸調整装置。
【請求項7】
前記送出状態変更部は、前記非調整対象レーダーの電磁波の送出を停止する、請求項6に記載のレーダー装置の軸調整装置。
【請求項8】
前記送出状態変更部は、前記調整対象レーダーから送出される電磁波の照射範囲と非調整対象レーダーから送出される電磁波の照射範囲とが重複しないよう、前記非調整対象レーダーが電磁波を送出する方向を変更する、請求項6に記載のレーダー装置の軸調整装置。
【請求項9】
前記非調整対象レーダーの取付け角度を変更する取付け角度変更部をさらに備え、
前記送出状態変更部は、前記非調整対象レーダーの取付け角度を変更して非調整対象レーダーが電磁波を送出する方向を変更する、請求項8に記載のレーダー装置の軸調整装置。
【請求項10】
前記送出状態変更部は、前記非調整対象レーダーから送出される電磁波の周波数を、前記調整対象レーダーから送出される電磁波の周波数と異なる帯域に変調する、請求項6に記載のレーダー装置の軸調整装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−2272(P2010−2272A)
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願番号】特願2008−160667(P2008−160667)
【出願日】平成20年6月19日(2008.6.19)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年1月7日(2010.1.7)
【国際特許分類】
【出願日】平成20年6月19日(2008.6.19)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]