
レーダ信号処理装置およびレーダ画像処理装置
【課題】本発明は、レーダ装置において、目標から到来した無線信号にその目標に所定の信号処理を施すレーダ信号処理装置と、目標の指示に必要な画像情報を生成するレーダ画像処理装置とに関し、目標の姿勢、移動方向、距離および方位の如何にかかわらず、その目標が地理的または物理的に占有する領域の識別を精度よく安定に実現できることを目的とする。
【解決手段】照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段とを備える。
【解決手段】照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置において、目標から到来した波動信号にその目標の識別に必要な信号処理を施すレーダ信号処理装置と、識別された目標の指示に必要な画像情報を生成するレーダ画像処理装置とに関する。
【背景技術】
【0002】
レーダ装置には、高度に進展した信号処理技術や情報処理技術が適用され、特に、船舶や航空機等のような移動する目標の高い精度による識別に併せて、このような目標の追尾に対する柔軟な適応性が要求されている。
【0003】
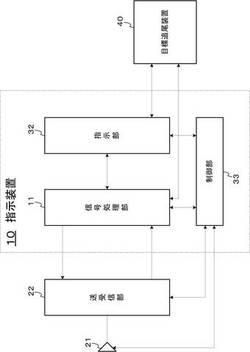
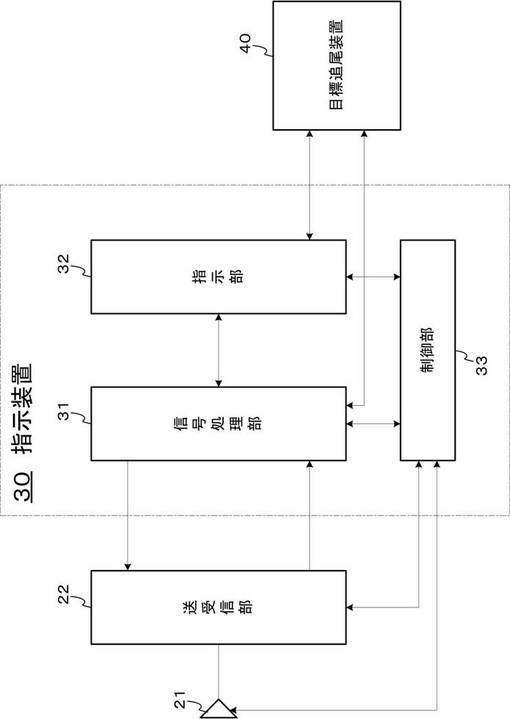
図5は、従来のレーダ装置の構成例を示す図である。
図において、空中線系21の給電路には送受信部22が接続され、その送受信部22の変調入力および復調出力は指示装置30に接続される。
【0004】
指示装置30では、上記送受信部22の変調入力および復調出力は、信号処理部23の変調出力および復調入力にそれぞれ接続される。信号処理部23の特定のポートには指示部32の対応するポートが接続され、これらの信号処理部31および指示部32が個別に有する制御用のポートには制御部33の第一および第二のポートがそれぞれ接続される。その制御部33の第三および第四のポートには、既述の空中線系21および送受信部22が個別に有する制御用のポートがそれぞれ接続される。また、信号処理部の31および指示部32の特定のポートには、目標追尾装置((TT:Target Tracking Apparatus)自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids))40の対応するポートが接続される。
【0005】
このような構成のレーダ装置では、信号処理部31は、ユーザが指示部32の操作部を介して与えた要求と、制御部25が所定の処理の手順に基づいて与える指令とに適合したベースバンド信号を生成する。送信部23は、制御部33の配下でそのベースバンドを所定の無線周波数の送信波に変換する。空中線系21は、既述の識別や追尾の対象となる船舶等の目標が位置し得る領域に、制御部33の配下で上記送信波を放射する。
【0006】
その送信波が目標で反射することによって空中線系21に到来した受信波は、送受信部22によって復調される。信号処理部31は、このような復調によって得られたベースバンド信号に所定の信号処理を施すことによって、例えば、個々の目標をPPIスコープに基づいて示す画像情報に変換する。指示部32は、このような画像情報を表示することにより、ユーザの目視による目標の識別に供される。
【0007】
また、信号処理部31は、上記信号処理の過程で識別された個々の目標に関する情報を目標追尾装置40に与える。
目標追尾装置40は、以下の処理を行う。
【0008】
(1) 上記情報に基づいて自船の周辺に位置する個々の船舶を目標として探知し、その情報を自動的にプロッティングすることにより、これらの目標の相対運動や真運動を解析する。
(2) その解析の結果として、避航操船のために有用であり、かつ指示器32の指示画面に重畳されて表示されるべき画像情報(以下、「重畳画像情報」という。)を生成し、その重畳画像情報を指示部32に与える。
【0009】
さらに、信号処理部31は、上記信号処理の過程では、個々の目標の長さやサイズを以下の何れかとして識別して既述の画像情報に反映させる。
(1) 目標のレンジ方向における幅
(2) 共通の目標から到来したと推定される受信波で示され、かつ指示部32の表示画面上の対応する領域を占有する画素の集合(面積)
【0010】
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献3がある。
(1) 「ほぼ同じ送出点(30)から所定面上のほぼ等角度間隔の各角度位置でレーザビーム(14)を送出し、物体(26)からの反射ビーム(28)より前記送出点(30)から前記物体(26)までの距離rを検出するとともに、前記物体(26)からの反射ビーム(28)のある角度位置の個数nを検出し、距離r及び個数nに基づいて前記物体(26)の大きさを判定する」ことにより、「距離検出対象物の検出に邪魔になる浮遊物等の物体を除外して距離検出対象物を正確に検出する」点に特徴があるレーザレーダによる物体大きさ判定方法…特許文献1
【0011】
(2) 「レーダ装置と共に船舶に搭載される自動衝突予防援助装置において、自船の周囲に存する他船の長さ、針路及び速度を、レーダ装置にて得られる映像情報から検出する他船検出手段と、他船検出手段により検出された自船に対する他船の相対速度と検出された船の長さとに基づき停止性能を算出する停止性能算出手段と、算出された停止性能と航行している海域の特性とに基づき、自船が進入すると他船との衝突の危険が生じるであろう危険領域を求める危険領域算出手段と、求めた危険領域を画面上に表示する手段とを備え、航行している海域の特性は、船舶が密に存在する輻輳海域から、そうでない海域までを示す特性であり、検出された船の長さは、自船の長さと他船検出手段によって検出された他船の長さとのうち、自船の長さと他船の長さとの二乗和平方根により加重平均を取った長さを用いた」ことにより、「船舶の大きさ及び動向を踏まえて危険領域を設定することにより、繰船者にとりより有用な援助を与える」点に特徴がある自動衝突予防援助装置…特許文献2
【0012】
(3) 「レーダにより得られる海上物標の平面的な測定面積と実面積との対応関係を、あらかじめ実験または推定処理により数式化する工程と、前記対応関係の数式を用いて、レーダから実際に得られた前記海上物標の測定面積から実面積を算出し、該実面積から海上物標の全長を、船舶等の平均的な全長対型幅比などから推定する工程と、前記レーダから実際に得られた海上物標の平面的な測定面積と実面積との対応データを所定量蓄積し、該蓄積した対応データに基づき前記対応関係の数式を逐次修正する工程とを含む」ことにより「システムの船舶固有データファイルが利用できない場合にも、レーダにより実際に得られた海上物標の測定面積から該物標の大きさ(長さ)を精度良く推定でき、この推定結果から船舶マークを安定に表示できる」点に特徴があるレーダによる海上物標の大きさ推定方法…特許文献3
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第2998125号公報
【特許文献2】特許第4055915号公報
【特許文献3】特開平5−188140号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
ところで、上述した従来例では、レンジ方向に対する目標の姿勢(傾き)とその目標の形状とにより、送信波を反射する目標の反射面のほぼ全てがレンジ方向における直近の面となる状態では、以下に列記するように、目標の識別および追尾の精度が大幅に損なわれる可能性が高かった。
【0015】
(1) 指示画面上における上記反射面の幅が該当する目標の長さと幅との何れに該当するかの特定が困難である。
(2) 目標の形状が略長方形であり、レンジ方向におけるその目標の背後の近傍に他の目標が位置している場合には、その目標の長さの識別が困難である。
(3) 該当する目標の近傍に他の目標が位置し得る場合には、これら困難性がさらに増加する。
【0016】
本発明は、目標の姿勢、移動方向、距離および方位の如何にかかわらず、その目標が地理的または物理的に占有する領域の識別を精度よく安定に実現できるレーダ信号処理装置およびレーダ画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0017】
請求項1に記載の発明では、目標評価手段は、照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する。目標識別手段とは、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する。
【0018】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が精度よく識別される。
【0019】
請求項2に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系の真北の方向である。
【0020】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が真北の方向を基準として精度よく識別される。
【0021】
請求項3に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系が搭載された移動体が移動する方向である。
【0022】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体が移動する方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0023】
請求項4に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系が搭載された移動体の先頭の方向である。
【0024】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体の先頭の方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0025】
請求項5に記載の発明では、目標評価手段は、照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記目標の指示に供される画面上における所望の箇所と前記所定の箇所に対する既定の方向とを基準として、前記参照情報を評価する。目標識別手段は、前記目標の距離および方位の下で前記参照情報の評価の結果を前記画面上において前記目標が占有する領域として識別する。
【0026】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が精度よく識別される。
【0027】
請求項6に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、前記所望の箇所の真北の方向である。
【0028】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が真北の方向を基準として精度よく識別される。
【0029】
請求項7に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、前記目標の指示に供される画面上において本発明が適用されたレーダ装置が移動する方向である。
【0030】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体が移動する方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0031】
請求項8に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、本発明が適用されたレーダ装置が搭載された移動体の前記目標の指示に供される画面上における先頭の方向である。
【0032】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体の先頭の方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【発明の効果】
【0033】
本発明によれば、別体に備えられた航行援助系との連係の下で構成が大幅に複雑となることなく、従来のレーダ信号処理やレーダ画像処理だけでは達成されなかった高い精度で安定に所望の目標の測位が達成される。
【0034】
したがって、本発明が適用されたレーダ装置は、運用や指示の形態と、目標の実体的な姿勢、距離、方向および移動方向との何れにも柔軟に適応した形態で測位が安価に実現される。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の原理を示す図である。
【図3】本実施形態における各部の連係を示す図である。
【図4】本実施形態における信号処理部の動作フローチャートである。
【図5】従来のレーダ装置の構成例を示す図である。
【発明を実施するための形態】
【0036】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
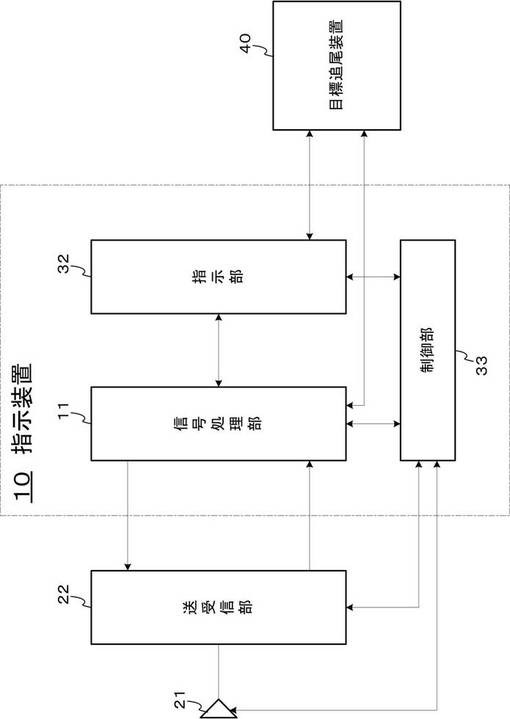
図1は、本発明の一実施形態を示す図である。
図において、図5に示すものと機能および構成が同じものについては、同じ符号を付与し、ここでは、その説明を省略する。
【0037】
本実施形態と図5に示す従来例との構成の相違点は、指示装置30に代えて、「信号処理部31に代えて信号処理部11が備えられた」点でその指示装置30と異なる指示装置10が備えられた点にある。
【0038】
図2は、本実施形態の原理を示す図である。
図3は、本実施形態における各部の連係を示す図である。
図4は、本実施形態における信号処理部の動作フローチャートである。
以下、図1ないし図4を参照して本実施形態の動作を説明する。
【0039】
本発明の特徴は、本実施形態では、後述するように信号処理部11が制御部33の配下で行う信号処理の過程においてPPIスコープ上で目標が占有する領域を特定し、かつ指示部32に与えられるべき画像情報にその領域を示す画像情報(以下、「推定目標画像」という。)を付加する点にある。
【0040】
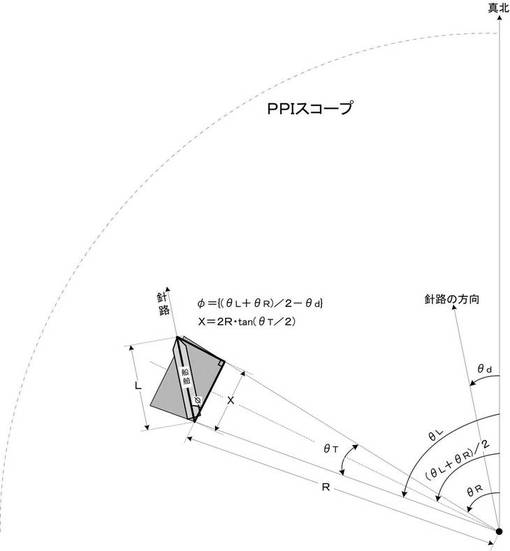
本実施形態における本発明の原理は、以下の通りである。
目標追尾装置40によって探知され、かつ既述の相対運動や真運動の解析の対象となる目標である船舶の針路θd
と、PPIスコープ上でその船舶を示すエコー画像が位置する領域の視角θT と、その領域の方位角の最小値θR および最大値θL と、その船舶の距離Rが既知である場合には、図2に示すように、上記視角θT 内にある既述の領域の辺の内、距離がRである辺の長さXは、下式で示される。
【0041】
X=2R・tan(θT/2) ・・・(a)
また、上記船舶の長さLは、図2に太線で示すように、長さがそれぞれLとXとである2つの辺を有し、これらの辺の挟角φが下式(b)で示される三角形の辺の長さとして求めることが可能であり、下式(c)で与えられる。
【0042】
φ=(θL+θR)/2−θd ・・・(b)
L=X/|cosφ|
・・・(c)
したがって、船舶の長さLは、上式(a)〜(c)より下式(d)で与えられる。
L=2R・tan(θT/2)/|cos{(θL+θR)/2−θd}| ・・・(d)
【0043】
なお、本実施形態における制御部33の機能の内、このような信号処理の過程における信号処理部11との連係に関連しない機能については、図5に示す従来例と同様であるので、以下では、その説明を省略する。
【0044】
信号処理部11は、概ね従来例と同様の信号処理を行うが、その信号処理の内容は、以下の点で従来例と異なる。
(1) 目標である船舶のサイズを識別する従来と同様の処理を行わない。
(2) その船舶の長さLを以下の通りに算出する。
【0045】
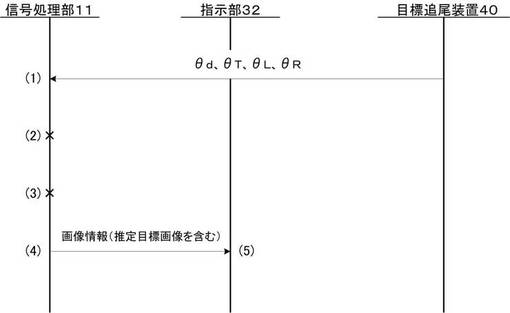
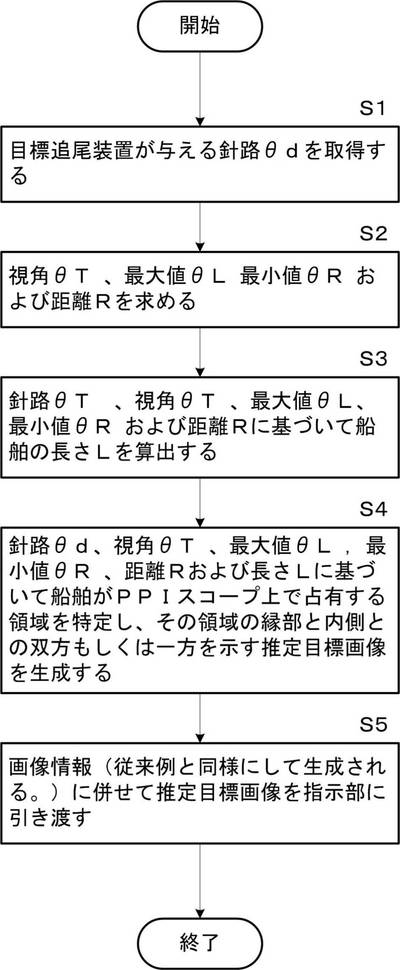
(2-1) 該当する船舶に関して目標追尾装置40が与える既述の針路θd
を取得する(図3(1) 、図4ステップS1)。
(2-2) 該当する船舶に関して既述の視角θT
、最大値θL 最小値θR および距離Rを求める(図3(2) 、図4ステップS2)。
【0046】
(2-3) 上記針路θT 、視角θT
、最大値θL 最小値θR および距離Rに基づいて上式(d)に示される算術演算を行うことにより、その船舶の長さLを算出する(図3(3) 、図4ステップS3)。
(2-4) 上記針路θd 、視角θT
、最大値θL ,最小値θR 、距離Rおよび長さLに基づいて該当する船舶がPPIスコープ上で占有する領域を特定し、その領域の縁部と内側との双方もしくは一方を示す推定目標画像を生成する(図3(4) 、図4ステップS4)。
【0047】
(2-5) 指示部32に与えられるべき画像情報(従来例と同様にして生成される。)に併せて上記推定目標画像を指示部32に引き渡す(図3(5) 、図4ステップS5)。
指示部32は、このようにして引き渡された画像情報および推定目標画像をPPIスコープ上における配置との整合を図りつつ重畳して表示する(図3(5))。
【0048】
すなわち、所望の船舶の長さLは、衝突予防にかかわる観測者の負担を軽減しつつ正確かつ迅速な状況の把握の継続性を図る目標追尾装置40が活用されることにより、該当する船舶が占有する領域を示す画像がPPIスコープ上に表示される。
したがって、本実施形態によれば、所望の船舶の針路、距離、方位および姿勢の如何にかかわらず、その船舶が占有する海域が精度よく特定され、指示画面上におけるその海域の識別が容易に実現される。
【0049】
なお、本実施形態では、針路θd が目標追尾装置40によって与えられている。
しかし、このような針路θd は、例えば、目標追尾装置40に代わるあるいは併用される自動船舶識別装置(AIS : Automatic Identification
System)によって与えられてもよい。
【0050】
また、針路θd が自動船舶識別装置によって与えられ、あるいはその自動船舶識別装置が目標追尾装置40と共に併用される場合には、このような自動船舶識別装置によって与えられる目標のサイズに基づいて推定目標画像のサイズが最適化されることにより、指示画面の精度や信頼性の向上が図られてもよい。
【0051】
さらに、本実施形態では、推定目標画像の生成と、指示部32に対するその推定目標画像の引き渡しとは、目標追尾装置40によって代行されてもよい。
【0052】
また、本実施形態では、既述の処理は、レーダ信号処理(クラッタ除去、MTI等を含む。)の過程で実現されているが、このようなレーダ信号処理の下でPPIスコープ上に表示されるべき画像情報の生成に供される画像処理の過程で行われてもよい。
【0053】
さらに、本実施形態では、本発明は、空中線系21が制御部33の配下で全方位のスイープやスキャンを行うレーダ装置に適用されているが、例えば、接岸距離計のように、測距のみを実現するためにスイープやスキャンが特定の方位のについて行われるレーダ装置にも同様に適用可能である。
また、本発明は、PPIスコープに適応する指示方式のレーダ装置に限定されず、例えば、時間軸遅延PPIスコープ、開心PPIスコープ、離心PPIスコープ、引き伸ばしPPIスコープ等の多様な指示方式のレーダ装置にも同様に適用可能である。
【0054】
さらに、本発明では、目標に対して照射される送信波と、その目標から放射されあるいは反射波として到来する受信波との双方が電波であるレーダ装置に限定されず、例えば、これらの送信波や受信波の双方もしくは一方が光信号、音波等の波動信号であるレーダ装置にも、同様に適用可能である。
【0055】
また、本実施形態では、既述の船舶の針路θd
と、PPIスコープ上でその船舶が位置する領域の視角θT と、その領域の方位角の最大値θL および最小値θR
と、その船舶の距離Rとが何れも二次元的な海面上における船舶の姿勢として与えられている。
【0056】
しかし、本発明は、船舶に限定されず、例えば、目標追尾装置40や自動船舶識別装置に代わるACARS(Aircraft Communications Addressing and Reporting System)が連係することにより、航空機等の目標が三次元的に占有する空間についても、その目標の針路、距離、方位および姿勢の如何にかかわらず識別可能とするための3次元レーダ装置にも、同様に適用可能である。
【0057】
さらに,本実施形態では、既述の船舶の針路θd
、方位角の最大値θL および最小値θR
は、何れも、PPIスコープ上における真北の方向を基準として与えられている。
しかし、これらの針路θd 、最大値θL
および最小値θR が以下の何れかを基準とする換算値として与えられあるいは算出されるならば、本発明は同様に適用可能である。
(1) 船舶の針路の方向
(2) 船舶の船首の方向
(3) 予め操作者等によって設定された任意の方向
【0058】
また、本実施形態では、船舶の距離Rは、以下の何れの距離として算定されてもよい。
【0059】
(1) 船舶から最先に受信波が受信された時点として識別される最短の距離
(2) 船舶から受信波が受信された時点の平均として識別される平均距離
(3) 船舶から受信波が最大のレベルで受信された時点として識別される距離
(4) 複数回のスイープによって得られた目標の距離(上記(1)〜(3)の何れであってもよい。)の平均値として識別される距離
【0060】
さらに、本実施形態では、既述の推定目標画像は、以下の何れの形態で生成されてもよい。
(1) 本発明に係るレーダ装置と連係するAIS等によって与えられる目標のサイズや形状が反映される。
(2) このようなサイズや形状の情報が得られない場合には、指示画面上で隣接する画素の内、該当する目標から到来したと推定可能であってレベルが所定の閾値を超える受信波で示される画素(または、その受信波で示される輝度が所定の閾値を超える画素)の集合として生成される。
【0061】
また、本実施形態では、目標追尾装置40によって与えられた針路θd
が既述の推定目標画像の生成に相応しくない程度に古い場合には、その推定目標画像の生成が見合わされ、後続する最新の針路θd が与えられた時点で推定目標の生成を再開することにより、信頼性の確保が図られてもよい。
【0062】
さらに、本発明は、パルスレーダに限定されず、例えば、CWレーダ、パルス圧縮レーダ、二次レーダその他の多様な方式のレーダにも同様に適用可能である。
【0063】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0064】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0065】
[請求項9] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における最小の距離を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0066】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における最小の距離を前記目標の距離として採用する。
【0067】
このような最小の距離は、レーダ信号処理の過程では、一般に、簡便な処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広い領域でない場合には、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0068】
[請求項10] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0069】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する。
【0070】
このような距離の平均は、レーダ信号処理の過程では、一般に、単純な積分処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
[請求項11] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0071】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する。
【0072】
このような距離は、レーダ信号処理の過程では、一般に、該当する目標から到来した無線信号の先頭値を検出する処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0073】
[請求項12] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
スイープ毎に識別される前記目標の部位のスイープ方向における距離の平均を前記目標距離として採用する
ことを特徴とするレーダ信号処理装置。
【0074】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、スイープ毎に識別される前記目標の部位のレンジ方向における距離の平均を前記目標距離として採用する。
【0075】
このような距離は、レーダ信号処理の過程では、一般に、該当する目標から到来した無線信号の振幅をスイープ方向に積分する処理により求めることが可能である。
したがって、目標が位置する領域がスイープ(スキャン)方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0076】
[請求項13] 請求項1、2、3、4、9、10、11、12の何れか1項に記載のレーダ信号処理装置において、
前記目標識別手段は、
前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る
ことを特徴とするレーダ信号処理装置。
【0077】
このような構成のレーダ信号処理装置では、請求項1、2、3、4、9、10、11、12の何れか1項に記載のレーダ信号処理装置において、前記目標識別手段は、前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る。
【0078】
すなわち、目標が位置する領域の識別は、従来のレーダ信号処理のみによっては求められず、上記付加情報が反映されることによって実現される。
したがって、目標から到来する無線信号にその目標が位置する領域の識別の誤差要因となるクラッタ、雑音等が多く含まれ、あるいは本発明が適用されたレーダ装置の分解能が不十分である場合であっても、目標が占有する領域の識別が精度よく実現される。
【0079】
[請求項14] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向において前記処理の箇所に対して最小の距離を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0080】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向において前記処理の箇所に対して最小の距離を前記目標の距離として採用する。
【0081】
このような最小の距離は、レーダ画像処理の過程では、一般に、簡便な処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向の広い領域でない場合には、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0082】
[請求項15] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0083】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する。
【0084】
このような距離の平均は、レーダ画像処理の過程では、一般に、画素値の単純な積分処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0085】
[請求項16] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0086】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する。
【0087】
このような距離は、レーダ画像処理の過程では、一般に、該当する目標から到来した無線信号で示される画素値の先頭値を検出する処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0088】
[請求項17] 請求項14ないし請求項16の何れか1項に記載されたレーダ画像処理装置において、
前記目標評価手段は、
スイープ毎に識別される前記目標の部位のスイープ方向における距離の平均を前記目標距離として採用する
ことを特徴とするレーダ画像処理装置。
【0089】
このような構成のレーダ画像処理装置では、請求項14ないし請求項16の何れか1項に記載されたレーダ画像処理装置において、前記目標評価手段は、スイープ毎に識別される前記目標の部位のレンジ方向における距離の平均を前記目標距離として採用する。
【0090】
このような距離は、レーダ画像処理の過程では、一般に、該当する目標から到来した無線信号で示される画素値をスイープ方向に積分する処理により求めることが可能である。
したがって、目標が位置する領域がスイープ(スキャン)方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0091】
[請求項18] 請求項5、6、7、8、14、15、16、17の何れか1項に記載されたレーダ画像処理装置において、
前記目標識別手段は、
前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る
【0092】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16、17の何れか1項に記載されたレーダ画像処理装置において、前記目標識別手段は、前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る。
【0093】
すなわち、目標が位置する領域の識別は、従来のレーダ画像処理のみによっては求められず、上記付加情報が反映されることによって実現される。
したがって、目標から到来する無線信号にその目標が位置する領域の識別の誤差要因となるクラッタ、雑音等が多く含まれ、あるいは本発明が適用されたレーダ装置の分解能が不十分である場合であっても、目標が占有する領域の識別が精度よく実現される。
【0094】
[請求項19] 請求項5、6、7、8、14、15、16、17、18の何れか1項に記載のレーダ画像処理装置において、
前記目標識別手段は、
レンジ方向とスイープ方向との双方または何れか一方に連なる画素の集合として前記目標が占有する領域を識別する
ことを特徴とするレーダ画像処理装置。
【0095】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16、17、18の何れか1項に記載のレーダ画像処理装置において、前記目標識別手段は、レンジ方向とスイープ方向との双方または何れか一方に連なる画素の集合として前記目標が占有する領域を識別する。
【0096】
すなわち、目標が位置して占有する領域の識別は、その目標の形状が外部から与えられない場合であっても、上記連なる画素の集合を特定する簡便な画像処理により実現される。
したがって、本発明が適用されたレーダ装置によれば、構成が大幅に複雑化することなく、外部の多様な装置や系と連係することにより、従来のレーダ信号処理やレーダ画像処理だけでは達成されなかった高い精度で安定に所望の目標の測位が達成される。
【0097】
[請求項20] 請求項5、6、7、8、14、15、16の何れか1項に記載のレーダ画像処理装置において、
前記目標の指示を行う画像処理の領域で前記目標の距離を求めて参照する
ことを特徴とするレーダ画像処理装置。
【0098】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16の何れか1項に記載のレーダ画像処理装置において、前記目標の指示を行う画像処理の領域で前記目標の距離を求めて参照する。
【0099】
すなわち、目標の距離は、レーダ信号処理ではなく、そのレーダ信号処理に比べて演算対象の情報量が大幅に少ないレーダ画像処理の過程で求められ、かつ該当する目標が占有する領域の識別に供される。
したがって、本発明の実現のために総合的に要する処理量の削減に併せて、応答性の向上が可能となる。
【符号の説明】
【0100】
10,30 指示装置
11,31 信号処理部
12 制御部
21 空中線系
22 送受信部
32 指示部
33 制御部
40 目標追尾装置
【技術分野】
【0001】
本発明は、レーダ装置において、目標から到来した波動信号にその目標の識別に必要な信号処理を施すレーダ信号処理装置と、識別された目標の指示に必要な画像情報を生成するレーダ画像処理装置とに関する。
【背景技術】
【0002】
レーダ装置には、高度に進展した信号処理技術や情報処理技術が適用され、特に、船舶や航空機等のような移動する目標の高い精度による識別に併せて、このような目標の追尾に対する柔軟な適応性が要求されている。
【0003】
図5は、従来のレーダ装置の構成例を示す図である。
図において、空中線系21の給電路には送受信部22が接続され、その送受信部22の変調入力および復調出力は指示装置30に接続される。
【0004】
指示装置30では、上記送受信部22の変調入力および復調出力は、信号処理部23の変調出力および復調入力にそれぞれ接続される。信号処理部23の特定のポートには指示部32の対応するポートが接続され、これらの信号処理部31および指示部32が個別に有する制御用のポートには制御部33の第一および第二のポートがそれぞれ接続される。その制御部33の第三および第四のポートには、既述の空中線系21および送受信部22が個別に有する制御用のポートがそれぞれ接続される。また、信号処理部の31および指示部32の特定のポートには、目標追尾装置((TT:Target Tracking Apparatus)自動衝突予防援助装置(ARPA:Automatic Radar Plotting Aids))40の対応するポートが接続される。
【0005】
このような構成のレーダ装置では、信号処理部31は、ユーザが指示部32の操作部を介して与えた要求と、制御部25が所定の処理の手順に基づいて与える指令とに適合したベースバンド信号を生成する。送信部23は、制御部33の配下でそのベースバンドを所定の無線周波数の送信波に変換する。空中線系21は、既述の識別や追尾の対象となる船舶等の目標が位置し得る領域に、制御部33の配下で上記送信波を放射する。
【0006】
その送信波が目標で反射することによって空中線系21に到来した受信波は、送受信部22によって復調される。信号処理部31は、このような復調によって得られたベースバンド信号に所定の信号処理を施すことによって、例えば、個々の目標をPPIスコープに基づいて示す画像情報に変換する。指示部32は、このような画像情報を表示することにより、ユーザの目視による目標の識別に供される。
【0007】
また、信号処理部31は、上記信号処理の過程で識別された個々の目標に関する情報を目標追尾装置40に与える。
目標追尾装置40は、以下の処理を行う。
【0008】
(1) 上記情報に基づいて自船の周辺に位置する個々の船舶を目標として探知し、その情報を自動的にプロッティングすることにより、これらの目標の相対運動や真運動を解析する。
(2) その解析の結果として、避航操船のために有用であり、かつ指示器32の指示画面に重畳されて表示されるべき画像情報(以下、「重畳画像情報」という。)を生成し、その重畳画像情報を指示部32に与える。
【0009】
さらに、信号処理部31は、上記信号処理の過程では、個々の目標の長さやサイズを以下の何れかとして識別して既述の画像情報に反映させる。
(1) 目標のレンジ方向における幅
(2) 共通の目標から到来したと推定される受信波で示され、かつ指示部32の表示画面上の対応する領域を占有する画素の集合(面積)
【0010】
なお、本発明に関連性がある先行技術としては、以下に列記する特許文献1ないし特許文献3がある。
(1) 「ほぼ同じ送出点(30)から所定面上のほぼ等角度間隔の各角度位置でレーザビーム(14)を送出し、物体(26)からの反射ビーム(28)より前記送出点(30)から前記物体(26)までの距離rを検出するとともに、前記物体(26)からの反射ビーム(28)のある角度位置の個数nを検出し、距離r及び個数nに基づいて前記物体(26)の大きさを判定する」ことにより、「距離検出対象物の検出に邪魔になる浮遊物等の物体を除外して距離検出対象物を正確に検出する」点に特徴があるレーザレーダによる物体大きさ判定方法…特許文献1
【0011】
(2) 「レーダ装置と共に船舶に搭載される自動衝突予防援助装置において、自船の周囲に存する他船の長さ、針路及び速度を、レーダ装置にて得られる映像情報から検出する他船検出手段と、他船検出手段により検出された自船に対する他船の相対速度と検出された船の長さとに基づき停止性能を算出する停止性能算出手段と、算出された停止性能と航行している海域の特性とに基づき、自船が進入すると他船との衝突の危険が生じるであろう危険領域を求める危険領域算出手段と、求めた危険領域を画面上に表示する手段とを備え、航行している海域の特性は、船舶が密に存在する輻輳海域から、そうでない海域までを示す特性であり、検出された船の長さは、自船の長さと他船検出手段によって検出された他船の長さとのうち、自船の長さと他船の長さとの二乗和平方根により加重平均を取った長さを用いた」ことにより、「船舶の大きさ及び動向を踏まえて危険領域を設定することにより、繰船者にとりより有用な援助を与える」点に特徴がある自動衝突予防援助装置…特許文献2
【0012】
(3) 「レーダにより得られる海上物標の平面的な測定面積と実面積との対応関係を、あらかじめ実験または推定処理により数式化する工程と、前記対応関係の数式を用いて、レーダから実際に得られた前記海上物標の測定面積から実面積を算出し、該実面積から海上物標の全長を、船舶等の平均的な全長対型幅比などから推定する工程と、前記レーダから実際に得られた海上物標の平面的な測定面積と実面積との対応データを所定量蓄積し、該蓄積した対応データに基づき前記対応関係の数式を逐次修正する工程とを含む」ことにより「システムの船舶固有データファイルが利用できない場合にも、レーダにより実際に得られた海上物標の測定面積から該物標の大きさ(長さ)を精度良く推定でき、この推定結果から船舶マークを安定に表示できる」点に特徴があるレーダによる海上物標の大きさ推定方法…特許文献3
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特許第2998125号公報
【特許文献2】特許第4055915号公報
【特許文献3】特開平5−188140号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
ところで、上述した従来例では、レンジ方向に対する目標の姿勢(傾き)とその目標の形状とにより、送信波を反射する目標の反射面のほぼ全てがレンジ方向における直近の面となる状態では、以下に列記するように、目標の識別および追尾の精度が大幅に損なわれる可能性が高かった。
【0015】
(1) 指示画面上における上記反射面の幅が該当する目標の長さと幅との何れに該当するかの特定が困難である。
(2) 目標の形状が略長方形であり、レンジ方向におけるその目標の背後の近傍に他の目標が位置している場合には、その目標の長さの識別が困難である。
(3) 該当する目標の近傍に他の目標が位置し得る場合には、これら困難性がさらに増加する。
【0016】
本発明は、目標の姿勢、移動方向、距離および方位の如何にかかわらず、その目標が地理的または物理的に占有する領域の識別を精度よく安定に実現できるレーダ信号処理装置およびレーダ画像処理装置を提供することを目的とする。
【課題を解決するための手段】
【0017】
請求項1に記載の発明では、目標評価手段は、照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する。目標識別手段とは、前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する。
【0018】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が精度よく識別される。
【0019】
請求項2に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系の真北の方向である。
【0020】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が真北の方向を基準として精度よく識別される。
【0021】
請求項3に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系が搭載された移動体が移動する方向である。
【0022】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体が移動する方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0023】
請求項4に記載の発明では、請求項1に記載のレーダ信号処理装置において、前記既定の方向は、前記空中線系が搭載された移動体の先頭の方向である。
【0024】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体の先頭の方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0025】
請求項5に記載の発明では、目標評価手段は、照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記目標の指示に供される画面上における所望の箇所と前記所定の箇所に対する既定の方向とを基準として、前記参照情報を評価する。目標識別手段は、前記目標の距離および方位の下で前記参照情報の評価の結果を前記画面上において前記目標が占有する領域として識別する。
【0026】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が精度よく識別される。
【0027】
請求項6に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、前記所望の箇所の真北の方向である。
【0028】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、該当する目標が位置して占有する領域が真北の方向を基準として精度よく識別される。
【0029】
請求項7に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、前記目標の指示に供される画面上において本発明が適用されたレーダ装置が移動する方向である。
【0030】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体が移動する方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【0031】
請求項8に記載の発明では、請求項5に記載のレーダ画像処理装置において、前記既定の方向は、本発明が適用されたレーダ装置が搭載された移動体の前記目標の指示に供される画面上における先頭の方向である。
【0032】
すなわち、目標の相対的な距離および方位と目標が進む方向との如何にかかわらず、上記参照情報を提供する装置や系との連係の下で、本発明が適用されたレーダ装置が搭載された移動体の先頭の方向を基準として、該当する目標が位置して占有する領域が精度よく識別される。
【発明の効果】
【0033】
本発明によれば、別体に備えられた航行援助系との連係の下で構成が大幅に複雑となることなく、従来のレーダ信号処理やレーダ画像処理だけでは達成されなかった高い精度で安定に所望の目標の測位が達成される。
【0034】
したがって、本発明が適用されたレーダ装置は、運用や指示の形態と、目標の実体的な姿勢、距離、方向および移動方向との何れにも柔軟に適応した形態で測位が安価に実現される。
【図面の簡単な説明】
【0035】
【図1】本発明の一実施形態を示す図である。
【図2】本実施形態の原理を示す図である。
【図3】本実施形態における各部の連係を示す図である。
【図4】本実施形態における信号処理部の動作フローチャートである。
【図5】従来のレーダ装置の構成例を示す図である。
【発明を実施するための形態】
【0036】
以下、図面に基づいて本発明の実施形態について詳細に説明する。
図1は、本発明の一実施形態を示す図である。
図において、図5に示すものと機能および構成が同じものについては、同じ符号を付与し、ここでは、その説明を省略する。
【0037】
本実施形態と図5に示す従来例との構成の相違点は、指示装置30に代えて、「信号処理部31に代えて信号処理部11が備えられた」点でその指示装置30と異なる指示装置10が備えられた点にある。
【0038】
図2は、本実施形態の原理を示す図である。
図3は、本実施形態における各部の連係を示す図である。
図4は、本実施形態における信号処理部の動作フローチャートである。
以下、図1ないし図4を参照して本実施形態の動作を説明する。
【0039】
本発明の特徴は、本実施形態では、後述するように信号処理部11が制御部33の配下で行う信号処理の過程においてPPIスコープ上で目標が占有する領域を特定し、かつ指示部32に与えられるべき画像情報にその領域を示す画像情報(以下、「推定目標画像」という。)を付加する点にある。
【0040】
本実施形態における本発明の原理は、以下の通りである。
目標追尾装置40によって探知され、かつ既述の相対運動や真運動の解析の対象となる目標である船舶の針路θd
と、PPIスコープ上でその船舶を示すエコー画像が位置する領域の視角θT と、その領域の方位角の最小値θR および最大値θL と、その船舶の距離Rが既知である場合には、図2に示すように、上記視角θT 内にある既述の領域の辺の内、距離がRである辺の長さXは、下式で示される。
【0041】
X=2R・tan(θT/2) ・・・(a)
また、上記船舶の長さLは、図2に太線で示すように、長さがそれぞれLとXとである2つの辺を有し、これらの辺の挟角φが下式(b)で示される三角形の辺の長さとして求めることが可能であり、下式(c)で与えられる。
【0042】
φ=(θL+θR)/2−θd ・・・(b)
L=X/|cosφ|
・・・(c)
したがって、船舶の長さLは、上式(a)〜(c)より下式(d)で与えられる。
L=2R・tan(θT/2)/|cos{(θL+θR)/2−θd}| ・・・(d)
【0043】
なお、本実施形態における制御部33の機能の内、このような信号処理の過程における信号処理部11との連係に関連しない機能については、図5に示す従来例と同様であるので、以下では、その説明を省略する。
【0044】
信号処理部11は、概ね従来例と同様の信号処理を行うが、その信号処理の内容は、以下の点で従来例と異なる。
(1) 目標である船舶のサイズを識別する従来と同様の処理を行わない。
(2) その船舶の長さLを以下の通りに算出する。
【0045】
(2-1) 該当する船舶に関して目標追尾装置40が与える既述の針路θd
を取得する(図3(1) 、図4ステップS1)。
(2-2) 該当する船舶に関して既述の視角θT
、最大値θL 最小値θR および距離Rを求める(図3(2) 、図4ステップS2)。
【0046】
(2-3) 上記針路θT 、視角θT
、最大値θL 最小値θR および距離Rに基づいて上式(d)に示される算術演算を行うことにより、その船舶の長さLを算出する(図3(3) 、図4ステップS3)。
(2-4) 上記針路θd 、視角θT
、最大値θL ,最小値θR 、距離Rおよび長さLに基づいて該当する船舶がPPIスコープ上で占有する領域を特定し、その領域の縁部と内側との双方もしくは一方を示す推定目標画像を生成する(図3(4) 、図4ステップS4)。
【0047】
(2-5) 指示部32に与えられるべき画像情報(従来例と同様にして生成される。)に併せて上記推定目標画像を指示部32に引き渡す(図3(5) 、図4ステップS5)。
指示部32は、このようにして引き渡された画像情報および推定目標画像をPPIスコープ上における配置との整合を図りつつ重畳して表示する(図3(5))。
【0048】
すなわち、所望の船舶の長さLは、衝突予防にかかわる観測者の負担を軽減しつつ正確かつ迅速な状況の把握の継続性を図る目標追尾装置40が活用されることにより、該当する船舶が占有する領域を示す画像がPPIスコープ上に表示される。
したがって、本実施形態によれば、所望の船舶の針路、距離、方位および姿勢の如何にかかわらず、その船舶が占有する海域が精度よく特定され、指示画面上におけるその海域の識別が容易に実現される。
【0049】
なお、本実施形態では、針路θd が目標追尾装置40によって与えられている。
しかし、このような針路θd は、例えば、目標追尾装置40に代わるあるいは併用される自動船舶識別装置(AIS : Automatic Identification
System)によって与えられてもよい。
【0050】
また、針路θd が自動船舶識別装置によって与えられ、あるいはその自動船舶識別装置が目標追尾装置40と共に併用される場合には、このような自動船舶識別装置によって与えられる目標のサイズに基づいて推定目標画像のサイズが最適化されることにより、指示画面の精度や信頼性の向上が図られてもよい。
【0051】
さらに、本実施形態では、推定目標画像の生成と、指示部32に対するその推定目標画像の引き渡しとは、目標追尾装置40によって代行されてもよい。
【0052】
また、本実施形態では、既述の処理は、レーダ信号処理(クラッタ除去、MTI等を含む。)の過程で実現されているが、このようなレーダ信号処理の下でPPIスコープ上に表示されるべき画像情報の生成に供される画像処理の過程で行われてもよい。
【0053】
さらに、本実施形態では、本発明は、空中線系21が制御部33の配下で全方位のスイープやスキャンを行うレーダ装置に適用されているが、例えば、接岸距離計のように、測距のみを実現するためにスイープやスキャンが特定の方位のについて行われるレーダ装置にも同様に適用可能である。
また、本発明は、PPIスコープに適応する指示方式のレーダ装置に限定されず、例えば、時間軸遅延PPIスコープ、開心PPIスコープ、離心PPIスコープ、引き伸ばしPPIスコープ等の多様な指示方式のレーダ装置にも同様に適用可能である。
【0054】
さらに、本発明では、目標に対して照射される送信波と、その目標から放射されあるいは反射波として到来する受信波との双方が電波であるレーダ装置に限定されず、例えば、これらの送信波や受信波の双方もしくは一方が光信号、音波等の波動信号であるレーダ装置にも、同様に適用可能である。
【0055】
また、本実施形態では、既述の船舶の針路θd
と、PPIスコープ上でその船舶が位置する領域の視角θT と、その領域の方位角の最大値θL および最小値θR
と、その船舶の距離Rとが何れも二次元的な海面上における船舶の姿勢として与えられている。
【0056】
しかし、本発明は、船舶に限定されず、例えば、目標追尾装置40や自動船舶識別装置に代わるACARS(Aircraft Communications Addressing and Reporting System)が連係することにより、航空機等の目標が三次元的に占有する空間についても、その目標の針路、距離、方位および姿勢の如何にかかわらず識別可能とするための3次元レーダ装置にも、同様に適用可能である。
【0057】
さらに,本実施形態では、既述の船舶の針路θd
、方位角の最大値θL および最小値θR
は、何れも、PPIスコープ上における真北の方向を基準として与えられている。
しかし、これらの針路θd 、最大値θL
および最小値θR が以下の何れかを基準とする換算値として与えられあるいは算出されるならば、本発明は同様に適用可能である。
(1) 船舶の針路の方向
(2) 船舶の船首の方向
(3) 予め操作者等によって設定された任意の方向
【0058】
また、本実施形態では、船舶の距離Rは、以下の何れの距離として算定されてもよい。
【0059】
(1) 船舶から最先に受信波が受信された時点として識別される最短の距離
(2) 船舶から受信波が受信された時点の平均として識別される平均距離
(3) 船舶から受信波が最大のレベルで受信された時点として識別される距離
(4) 複数回のスイープによって得られた目標の距離(上記(1)〜(3)の何れであってもよい。)の平均値として識別される距離
【0060】
さらに、本実施形態では、既述の推定目標画像は、以下の何れの形態で生成されてもよい。
(1) 本発明に係るレーダ装置と連係するAIS等によって与えられる目標のサイズや形状が反映される。
(2) このようなサイズや形状の情報が得られない場合には、指示画面上で隣接する画素の内、該当する目標から到来したと推定可能であってレベルが所定の閾値を超える受信波で示される画素(または、その受信波で示される輝度が所定の閾値を超える画素)の集合として生成される。
【0061】
また、本実施形態では、目標追尾装置40によって与えられた針路θd
が既述の推定目標画像の生成に相応しくない程度に古い場合には、その推定目標画像の生成が見合わされ、後続する最新の針路θd が与えられた時点で推定目標の生成を再開することにより、信頼性の確保が図られてもよい。
【0062】
さらに、本発明は、パルスレーダに限定されず、例えば、CWレーダ、パルス圧縮レーダ、二次レーダその他の多様な方式のレーダにも同様に適用可能である。
【0063】
また、本発明は、上述した実施形態に限定されず、本発明の範囲において多様な実施形態の構成が可能であり、構成要素の全てまたは一部に如何なる改良が施されてもよい。
【0064】
以下、本願に開示された発明の内、「特許請求の範囲」に記載しなかった発明の構成、作用および効果を「特許請求の範囲」および「課題を解決するための手段」の欄の記載に準じた様式により列記する。
【0065】
[請求項9] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における最小の距離を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0066】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における最小の距離を前記目標の距離として採用する。
【0067】
このような最小の距離は、レーダ信号処理の過程では、一般に、簡便な処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広い領域でない場合には、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0068】
[請求項10] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0069】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する。
【0070】
このような距離の平均は、レーダ信号処理の過程では、一般に、単純な積分処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
[請求項11] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する
ことを特徴とするレーダ信号処理装置。
【0071】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する。
【0072】
このような距離は、レーダ信号処理の過程では、一般に、該当する目標から到来した無線信号の先頭値を検出する処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0073】
[請求項12] 請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、
前記目標評価手段は、
スイープ毎に識別される前記目標の部位のスイープ方向における距離の平均を前記目標距離として採用する
ことを特徴とするレーダ信号処理装置。
【0074】
このような構成のレーダ信号処理装置では、請求項1ないし請求項4の何れか1項に記載のレーダ信号処理装置において、前記目標評価手段は、スイープ毎に識別される前記目標の部位のレンジ方向における距離の平均を前記目標距離として採用する。
【0075】
このような距離は、レーダ信号処理の過程では、一般に、該当する目標から到来した無線信号の振幅をスイープ方向に積分する処理により求めることが可能である。
したがって、目標が位置する領域がスイープ(スキャン)方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0076】
[請求項13] 請求項1、2、3、4、9、10、11、12の何れか1項に記載のレーダ信号処理装置において、
前記目標識別手段は、
前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る
ことを特徴とするレーダ信号処理装置。
【0077】
このような構成のレーダ信号処理装置では、請求項1、2、3、4、9、10、11、12の何れか1項に記載のレーダ信号処理装置において、前記目標識別手段は、前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る。
【0078】
すなわち、目標が位置する領域の識別は、従来のレーダ信号処理のみによっては求められず、上記付加情報が反映されることによって実現される。
したがって、目標から到来する無線信号にその目標が位置する領域の識別の誤差要因となるクラッタ、雑音等が多く含まれ、あるいは本発明が適用されたレーダ装置の分解能が不十分である場合であっても、目標が占有する領域の識別が精度よく実現される。
【0079】
[請求項14] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向において前記処理の箇所に対して最小の距離を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0080】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向において前記処理の箇所に対して最小の距離を前記目標の距離として採用する。
【0081】
このような最小の距離は、レーダ画像処理の過程では、一般に、簡便な処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向の広い領域でない場合には、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0082】
[請求項15] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0083】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を放射しまたは反射した前記目標の部位のレンジ方向における距離の平均を前記目標の距離として採用する。
【0084】
このような距離の平均は、レーダ画像処理の過程では、一般に、画素値の単純な積分処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で簡便に精度よく識別可能である。
【0085】
[請求項16] 請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、
前記目標評価手段は、
前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する
ことを特徴とするレーダ画像処理装置。
【0086】
このような構成のレーダ画像処理装置では、請求項5ないし請求項8の何れか1項に記載のレーダ画像処理装置において、前記目標評価手段は、前記無線信号を最大のレベルで放射しまたは反射した前記目標の部位のレンジ方向における距離を前記目標の距離として採用する。
【0087】
このような距離は、レーダ画像処理の過程では、一般に、該当する目標から到来した無線信号で示される画素値の先頭値を検出する処理により求めることが可能である。
したがって、目標が位置する領域がレンジ方向に分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0088】
[請求項17] 請求項14ないし請求項16の何れか1項に記載されたレーダ画像処理装置において、
前記目標評価手段は、
スイープ毎に識別される前記目標の部位のスイープ方向における距離の平均を前記目標距離として採用する
ことを特徴とするレーダ画像処理装置。
【0089】
このような構成のレーダ画像処理装置では、請求項14ないし請求項16の何れか1項に記載されたレーダ画像処理装置において、前記目標評価手段は、スイープ毎に識別される前記目標の部位のレンジ方向における距離の平均を前記目標距離として採用する。
【0090】
このような距離は、レーダ画像処理の過程では、一般に、該当する目標から到来した無線信号で示される画素値をスイープ方向に積分する処理により求めることが可能である。
したがって、目標が位置する領域がスイープ(スキャン)方向に広く分布する場合であっても、その目標が占有する領域は、上記参照情報を提供する装置や系との連係の下で、かつ該当する目標の主要部が位置する領域の距離や方向を基準として簡便に精度よく識別可能である。
【0091】
[請求項18] 請求項5、6、7、8、14、15、16、17の何れか1項に記載されたレーダ画像処理装置において、
前記目標識別手段は、
前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る
【0092】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16、17の何れか1項に記載されたレーダ画像処理装置において、前記目標識別手段は、前記外部から前記目標のサイズと形状との双方または何れか一方からなる付加情報を取得し、前記目標が占有する領域に対する前記付加情報の反映を図る。
【0093】
すなわち、目標が位置する領域の識別は、従来のレーダ画像処理のみによっては求められず、上記付加情報が反映されることによって実現される。
したがって、目標から到来する無線信号にその目標が位置する領域の識別の誤差要因となるクラッタ、雑音等が多く含まれ、あるいは本発明が適用されたレーダ装置の分解能が不十分である場合であっても、目標が占有する領域の識別が精度よく実現される。
【0094】
[請求項19] 請求項5、6、7、8、14、15、16、17、18の何れか1項に記載のレーダ画像処理装置において、
前記目標識別手段は、
レンジ方向とスイープ方向との双方または何れか一方に連なる画素の集合として前記目標が占有する領域を識別する
ことを特徴とするレーダ画像処理装置。
【0095】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16、17、18の何れか1項に記載のレーダ画像処理装置において、前記目標識別手段は、レンジ方向とスイープ方向との双方または何れか一方に連なる画素の集合として前記目標が占有する領域を識別する。
【0096】
すなわち、目標が位置して占有する領域の識別は、その目標の形状が外部から与えられない場合であっても、上記連なる画素の集合を特定する簡便な画像処理により実現される。
したがって、本発明が適用されたレーダ装置によれば、構成が大幅に複雑化することなく、外部の多様な装置や系と連係することにより、従来のレーダ信号処理やレーダ画像処理だけでは達成されなかった高い精度で安定に所望の目標の測位が達成される。
【0097】
[請求項20] 請求項5、6、7、8、14、15、16の何れか1項に記載のレーダ画像処理装置において、
前記目標の指示を行う画像処理の領域で前記目標の距離を求めて参照する
ことを特徴とするレーダ画像処理装置。
【0098】
このような構成のレーダ画像処理装置では、請求項5、6、7、8、14、15、16の何れか1項に記載のレーダ画像処理装置において、前記目標の指示を行う画像処理の領域で前記目標の距離を求めて参照する。
【0099】
すなわち、目標の距離は、レーダ信号処理ではなく、そのレーダ信号処理に比べて演算対象の情報量が大幅に少ないレーダ画像処理の過程で求められ、かつ該当する目標が占有する領域の識別に供される。
したがって、本発明の実現のために総合的に要する処理量の削減に併せて、応答性の向上が可能となる。
【符号の説明】
【0100】
10,30 指示装置
11,31 信号処理部
12 制御部
21 空中線系
22 送受信部
32 指示部
33 制御部
40 目標追尾装置
【特許請求の範囲】
【請求項1】
照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、
前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段と
を備えたことを特徴とするレーダ信号処理装置。
【請求項2】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系の真北の方向である
ことを特徴とするレーダ信号処理装置。
【請求項3】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系が搭載された移動体が移動する方向である
ことを特徴とするレーダ信号処理装置。
【請求項4】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系が搭載された移動体の先頭の方向である
ことを特徴とするレーダ信号処理装置。
【請求項5】
照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記目標の指示に供される画面上の所望の箇所と前記所定の箇所に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、
前記目標の距離および方位の下で前記参照情報の評価の結果を前記画面上において前記目標が占有する領域として識別する目標識別手段と
を備えたことを特徴とするレーダ画像処理装置。
【請求項6】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
前記所望の箇所の真北の方向である
ことを特徴とするレーダ画像処理装置。
【請求項7】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
前記目標の指示に供される画面上において本発明が適用されたレーダ装置が移動する方向である
ことを特徴とするレーダ画像処理装置。
【請求項8】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
本発明が適用されたレーダ装置が搭載された移動体の前記目標の指示に供される画面上における先頭の方向である
ことを特徴とするレーダ画像処理装置。
【請求項1】
照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記無線信号の受信に供される空中線系と前記空中線系に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、
前記目標の距離および方位の下で前記参照情報の評価の結果を前記目標が占有する領域として識別する目標識別手段と
を備えたことを特徴とするレーダ信号処理装置。
【請求項2】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系の真北の方向である
ことを特徴とするレーダ信号処理装置。
【請求項3】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系が搭載された移動体が移動する方向である
ことを特徴とするレーダ信号処理装置。
【請求項4】
請求項1に記載のレーダ信号処理装置において、
前記既定の方向は、
前記空中線系が搭載された移動体の先頭の方向である
ことを特徴とするレーダ信号処理装置。
【請求項5】
照射された送信波に対する応答として無線信号を放射しまたは反射する目標の姿勢または移動方向を示す参照情報を外部から取得し、前記目標の指示に供される画面上の所望の箇所と前記所定の箇所に対する既定の方向とを基準として前記参照情報を評価する目標評価手段と、
前記目標の距離および方位の下で前記参照情報の評価の結果を前記画面上において前記目標が占有する領域として識別する目標識別手段と
を備えたことを特徴とするレーダ画像処理装置。
【請求項6】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
前記所望の箇所の真北の方向である
ことを特徴とするレーダ画像処理装置。
【請求項7】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
前記目標の指示に供される画面上において本発明が適用されたレーダ装置が移動する方向である
ことを特徴とするレーダ画像処理装置。
【請求項8】
請求項5に記載のレーダ画像処理装置において、
前記既定の方向は、
本発明が適用されたレーダ装置が搭載された移動体の前記目標の指示に供される画面上における先頭の方向である
ことを特徴とするレーダ画像処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−137446(P2012−137446A)
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願番号】特願2010−291465(P2010−291465)
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年7月19日(2012.7.19)
【国際特許分類】
【出願日】平成22年12月28日(2010.12.28)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]