
レーダ制御装置およびネットワークレーダ
【課題】 監視覆域がそれぞれ設定される複数のレーダから構成されるネットワークレーダにおいて、監視対象エリアを効率的に監視するネットワークレーダおよびこれに用いるレーダ制御装置を得る。
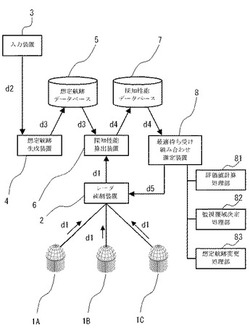
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航空機やミサイル等の目標物を探知するためにレーダの監視覆域を計算するレーダ制御装置およびこれを用いたネットワークレーダに関する。
【背景技術】
【0002】
従来、複数のレーダをネットワークで連結したネットワークレーダにおいては、レーダ制御装置が中央管理装置として各レーダを制御していた。例えば、特許文献1では、ネットワークレーダを構成するレーダの一つが自然条件の変動等で性能劣化した場合、レーダ制御装置は性能劣化したレーダを補うべく、他のレーダに監視覆域を変更する指示をして、ネットワークレーダ全体の性能を確保しようとしていた。
また、特許文献2では、レーダ制御装置は各レーダから得られたデータを統括してデータ処理を行なうとともに、位相を制御した送信信号を各レーダに送信していた。
【0003】
【特許文献1】特開2001−174547(第4頁、図3)
【特許文献2】特開2002−277533(第4頁、図1)
【0004】
ネットワークレーダにおいては、対象エリアを効率的に監視するため、目標物の出現確率の高いエリア(以降、「重点エリア」と称する)を集中的に監視すべく、レーダ制御装置がレーダを操作すれば、さらに効率的な監視を実現することができる。
しかし、特許文献1では、レーダ制御装置は、レーダの一つが性能劣化してはじめてレーダの監視覆域を変更しているだけであり、重点エリアを集中的に監視しているわけではない。なお、特許文献1では、1つのレーダが目標物を追尾している際に追尾範囲の外になってしまった場合、レーダ制御装置が隣のレーダにキューイング、つまり目標物の位置等の情報を与え、隣のレーダに目標物を検出させる動作をしている。しかし、この動作は、既に検出して追尾している目標物に関する情報をレーダに与えて、このレーダに目標物を検出させるだけであり、目標物を検出するために両レーダを効率的に動作させているわけではない。
また、特許文献2でも、レーダ制御装置はレーダの性能に応じて各レーダの監視覆域を制御していることはもちろん、重点エリアを集中的に監視していることもない。
【0005】
特許文献1および2のように対象エリアを平均的に監視すると、重点エリア以外のエリアにおいて、目標探知確率が必要以上に高くなったリソース割り振りになるなど、必要以上のレーダの動作リソースを割り振る可能性がある。
また、対象エリアが広い場合には、レーダの監視覆域の1スキャンに必要な時間を意味するデータレートが大きくなったり、いずれのレーダでも目標物の監視ができないような状態、いわゆる「抜け」が発生したりするなどの問題が生じる可能性もある。
【発明の開示】
【発明が解決しようとする課題】
【0006】
この発明は、上記のような課題を解決するためになされたもので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係るレーダ制御装置は、監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であり、目標物の想定航跡およびレーダ諸元に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部、探知性能に基づきレーダそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部、および待ち受け組み合わせ計算部が計算した監視覆域の設定をレーダごとに指示するレーダ統制部を備えたことを特徴とする。なお、レーダは所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【0008】
また、この発明に係るレーダ制御装置は、監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であり、目標物の想定航跡およびレーダのレーダ諸元に基づき、レーダが設定する監視覆域の全ての組み合わせごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部、探知性能に基づきレーダそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部、および待ち受け組み合わせ計算部が計算した監視覆域の設定をレーダごとに指示するレーダ統制部を備えたことを特徴とする。なお、レーダは所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【発明の効果】
【0009】
この発明によれば、レーダ制御装置が監視覆域の探知性能に基づきレーダそれぞれが設定する監視覆域を決定するとともに、決定した監視覆域をレーダごとに指示するので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることができる。
【0010】
また、この発明によれば、レーダ制御装置が監視覆域の組み合わせごとの探知性能に基づきレーダそれぞれが設定する監視覆域を決定するとともに、決定した監視覆域をレーダごとに指示するので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
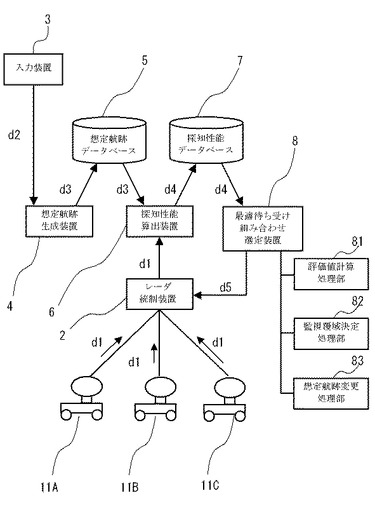
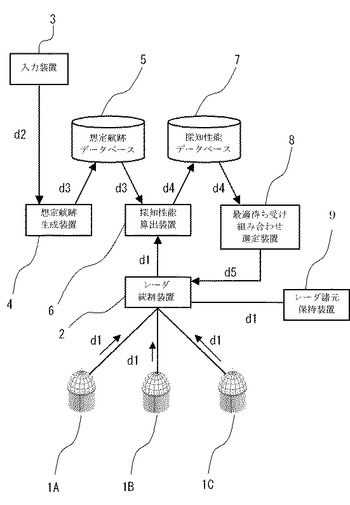
図1は、この発明の実施の形態1に係るレーダ制御装置の構成図である。レーダ制御装置は、待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部であるレーダ統制装置2、入力装置3、想定航跡生成装置4、想定航跡データベース5、目標物の予想される軌道である想定航跡およびレーダ1A、1Bおよび1Cのレーダ諸元に基づき、監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部である探知性能算出装置6、探知性能データベース7および探知性能に基づきレーダ1A、1Bおよび1Cそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部である最適待ち受け組み合わせ選定装置8を備えている。また、レーダ制御装置には監視覆域を設定するレーダ1A、1Bおよび1Cが接続している。
以降、説明の便宜上、レーダ1A、1Bおよび1Cを総じて説明する際にはレーダ1と称する。
【0012】
レーダ1は、既知の座標に設置された固定レーダであり、各レーダ1は、送受信タイミング、精度、探知範囲や探知確率などで示される探知に関する探知性能、および追尾に関する追尾性能など、レーダ1の機能や性能に関する諸元d1(以降、「レーダ諸元d1」と称す)をレーダ統制装置2に出力する。
【0013】
レーダ統制装置2は、レーダ1からレーダ諸元d1を受信して探知性能算出装置6に出力するとともに、最適待ち受け組み合わせ選定装置8から入力された各レーダ1の監視覆域の情報に基づき各レーダ1に監視覆域の設定を指示する。
【0014】
入力装置3は、事前情報d2が入力されるとこの事前情報d2を想定航跡生成装置4に出力する。事前情報とは、目標物の機種情報や目標物の出現しそうなエリア情報等であり、具体的には、飛行機や例えばTBMなどのミサイルと言った目標物に関する飛行諸元、目標物が出現しそうな位置や目標物が発射されると予想される位置(以降、「始点」と称する)、例えばミサイルの着弾予想点のような目標物の到着予想地点(以降、「終点」と称する)を示すものである。
さらに具体的に説明すると、想定航跡生成装置4は、目標物が航空機の場合には発射点となる航空基地を始点に、攻撃対象となる我が国の航空基地を終点とした想定航跡を作成したり、目標物がTBMの場合にはTBM発射基地等を始点に、東京等の大都市を着弾点である終点とした想定航跡を生成したりする。
【0015】
想定航跡生成装置4は、入力装置3から入力された事前情報d2に基づいて、想定航跡d3を計算して想定航跡データベース5に出力する。想定航跡とは、目標物の種類、始点および終点に基づいて計算されるものである。
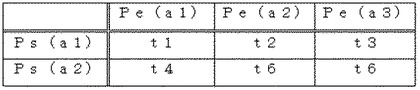
図2は、この発明の実施の形態1において想定航跡d3の概念を説明する図である。ここでは、目標物aに関して、予想される始点としてPs(a1)およびPs(a2)の2点があり、予想される終点としてPe(a1)、Pe(a2)およびPe(a3)の3点がある場合を例に挙げる。始点と終点、および目標物aの諸元があれば、目標物aの軌道を予想することができ、図2では、予想される軌道のパターンをt1、t2、・・・t6としている。
上記の例のように、想定航跡生成装置4は、始点と終点との全ての組み合わせおよび目標物aの諸元を考慮して、目標物aの軌道t1、t2、・・・t6を想定航跡d3として計算する。なお、目標物a、目標物b・・・のように複数の目標物を想定する場合も、上記の例と同様に想定航跡d3を計算する。
【0016】
想定航跡データベース5は、想定航跡生成装置4から入力された想定航跡d3を保持する。また、探知性能算出装置6に想定航跡d3を出力する。
【0017】
ところで、この実施の形態1では、想定航跡生成装置4は入力された事前情報d2に基づき想定航跡d3を計算して想定航跡データベース5に出力していたが、入力装置3には事前情報d2が入力される替わりに、予め計算した想定航跡d3が入力されるようにして良く、入力装置3は入力された想定航跡d3を想定航跡データベース5に直接出力しても良い。この場合、想定航跡生成装置4が不要となる。
また、想定航跡データベース5も備えずに、入力装置3から想定航跡d3を探知性能算出装置6に直接出力しても良い。この場合、探知性能算出装置6は、想定航跡d3が入力されるたびに後述の方法で探知性能を計算することになる。
【0018】
探知性能算出装置6は、第一に、レーダ統制装置2から入力されたレーダ諸元d1を元に、各レーダ1について設定可能な監視覆域のケースを計算する。これにより、全てのレーダ1に関する監視覆域の全ケースが計算される。
第二に、監視覆域の全ケースにおいて、想定航跡データベース5から入手した全ての想定航跡d3に対する探知性能を算出する。探知性能とは、各想定航跡d3上の目標物を探知するまでにかかる時間や探知確率等を示す。
探知性能算出装置6は、算出した探知性能d4を探知性能データベース7に出力する。
【0019】
探知性能データベース7は、探知性能算出装置6から入力された探知性能d4を保持する。また、最適待ち受け組み合わせ選定装置8に探知性能d4を出力する。
【0020】
最適待ち受け組み合わせ選定装置8は、監視覆域ごとで且つ想定航跡ごとの探知性能に基づき、目標物の探知が不可能である第1の想定航跡と目標物の探知が可能である第2の想定航跡とに応じて探知性能に付加する重みを変更し、重みを付加した探知性能を総合することにより、レーダのうち設定される監視覆域が未決定である第1のレーダが設定する監視覆域ごとの評価値を計算する評価値計算処理部81、第1のレーダに設定される監視覆域を評価値が最大である監視覆域に決定するとともに、監視覆域が決定された第1のレーダを第2のレーダに変更する監視覆域決定処理部82および第1のレーダから変更された第2のレーダにより目標物の探知が可能であると判断された第1の想定航跡を第2の想定航跡に変更する想定航跡変更処理部83とを備え、探知性能データベース7から入手した探知性能d4に基づき、各レーダ1をどの性能でどの方向にどのタイミングで待ち受けるのが最適な待ち受けとなるかの組み合わせを求める。
【0021】
次に、具体的な動作を説明する。
なお、事前情報d2が入力装置3を介して想定航跡生成装置4に入力されると、想定航跡生成装置4は、予め、事前情報d2に基づいて想定航跡d3を計算して、この想定航跡d3を想定航跡データベース5に出力する。
この後、想定航跡データベース5は入力された想定航跡d3を保持している。
【0022】
各レーダ1は各自のレーダ諸元d1をレーダ統制装置2へ出力すると、レーダ統制装置2は、各レーダ1から入力されたそれぞれのレーダ諸元d1を探知性能算出装置6に出力する。
探知性能算出装置6は、想定航跡データベース5から想定航跡d3を取得し、各想定航跡d3に対して、監視覆域ごとに探知性能d4を算出し、探知性能データベース7に出力する。探知性能d4の算出方法について以下に詳説する。
【0023】
例として、レーダ1が2つであり、レーダ1Aおよび1Bとした場合の探知性能の計算方法を説明する。
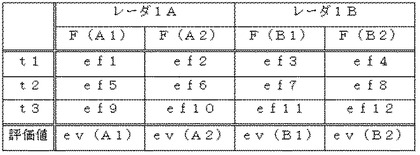
図3は、この発明の実施の形態1において探知性能d4の概念について説明する図である。レーダ1Aは、自らのレーダ諸元に従い監視覆域を変化させることができ、複数のパターンの監視領域を形成して目標物を監視することができる。ここでは、レーダ1Aが2パターンF(A1)、F(A2)の監視覆域を設定する場合を考える。また、レーダ1Bについてもレーダ1Aと同様であり、ここでは、レーダ1Bが2パターンF(B1)、F(B2)の監視覆域を設定する場合を考える。
また、想定航跡d3は、t1、t2およびt3の3種類からなるものとする。
探知性能算出装置6は、想定航跡の1つであるt1に関して、全ての監視覆域F(A1)、F(A2)、F(B1)およびF(B2)について探知性能を計算する。具体的には、想定航跡t1上の目標物が始点を出発してから監視覆域F(A1)、F(A2)、F(B1)およびF(B2)を設定するレーダが探知するまでに掛かる時間や探知確率等を探知性能ef1、ef2、ef3およびef4とする。また、想定航跡t2およびt3についても、t1の場合と同様の探知性能を計算し、ef5、・・・ef12とする。以下では、探知性能の値が大きいと探知性能が良いものとして説明する。
この例のように、探知性能算出装置6は、想定航跡d3ごとで且つ監視覆域ごとに探知性能を計算し、これらを探知性能d4として探知性能データベース7に出力する。
この後、探知性能データベース7は入力された探知性能d4を保持する。
【0024】
最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得し、各レーダ1における監視覆域の最適な組み合わせを計算する。
最適待ち受け組み合わせ選定装置8は、各想定航跡に対して探知性能の良い監視覆域を、当該レーダが待ち受け状態として設定すべき監視覆域として選択し、全レーダに関しても同様に設定すべき監視覆域を選択すれば、監視覆域に関する最適な組み合わせを算出することができる。
上記のような監視覆域に関する最適な組み合わせを計算する方式として、この実施の形態1では、グリーディーアルゴリズムの考え方に基づく方式を採用する。グリーディーアルゴリズムは、著名な最適化問題である集合被覆問題に対する解法として優れていることが分かっている。全探索などを行うと監視覆域に関する組み合わせの最適な解が得られるが、その反面、レーダ1の監視覆域の数や想定航跡d3の数によっては、最適な監視覆域の組み合わせを導くまでに現実的でない膨大な時間が掛かる可能性がある。このグリーディーアルゴリズムは、単純な処理の実行で優れた解を短時間で得ることができる。以降、この監視覆域に関する組み合わせを示しグリーディーアルゴリズムに基づく解を最適解と呼ぶ。以下にグリーディーアルゴリズムに基づく計算方法を説明する。
【0025】
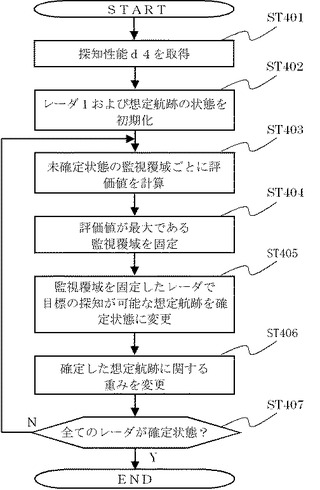
図4は、この発明の実施の形態1に係る最適待ち受け組み合わせ選定装置8がグリーディーアルゴリズムを採用して、監視覆域の最適な組み合わせを計算する方法を示したフローである。
まず、ステップST401にて探知性能データベース7から探知性能d4を取得する。ステップST401は、監視覆域の最適な組み合わせを計算する時点で実行しても良く、予め実行しておいても良い。
ステップST402にて、全てのレーダ1および想定航跡t1、t2およびt3の状態を初期化する。状態とは、「確定」および「未確定」のいずれかの状態を示す。具体的には、レーダ1は、設定する監視覆域が未決定である第1のレーダである「未確定状態」のレーダと、設定する監視覆域が決定されている第2のレーダである「確定状態」のレーダとに分類される。また、想定航跡は、当該想定航跡上の目標物が確定状態のレーダ1により探知が不可能である第1の想定航跡である「未確定状態」の想定航跡と、当該想定航跡上の目標物が確定状態のレーダ1により探知が可能となる第2の想定航跡である「確定状態」の想定航跡とに分類される。
【0026】
ステップST403では、評価値計算処理部81が、監視覆域ごとに下記の式(1)に示す方法で評価値を計算する。
(評価値)=Σ想定航跡{(重み)×(探知性能)} ・・・式(1)
監視覆域F(A1)を例に挙げて説明する。なお、現時点でレーダ1Aは未確定状態、想定航跡t1、t2およびt3も未確定状態であるものとする。最適待ち受け組み合わせ選定装置8は、F(A1)における想定航跡ごとの探知性能を、想定航跡に対して重み付けして総合したものをF(A1)の評価値とする。具体的には、図3では、ef1に重みを付加したもの、ef5に重みを付加したものおよびef9に重みを付加して積算したものを監視覆域F(A1)の評価値ev(A1)とする。監視覆域F(A2)も、上記と同様に計算し、評価値ev(A2)を計算する。
また、レーダ1Bの監視覆域である監視覆域F(B1)およびF(B2)に関しても、式(1)に従い評価値を計算する。
【0027】
次にステップST404では、監視覆域決定処理部82が、最も高い評価値を持つ監視覆域を選択し、この選択した監視覆域を選択した監視覆域が属するレーダが設定すべき監視覆域として決定するとともに、監視覆域を決定したレーダを確定状態に変更する。例えば、評価値ev(A1)、ev(A2)、ev(B1)およびev(B2)のうち、ev(A2)が最も高い場合には、レーダ1Aが設定すべき監視覆域をF(A2)に決定し、レーダ1Aを確定状態に変更する。レーダ1が確定状態になると、以降は当該レーダ1に関しての評価値計算処理部81の式(1)による評価値の計算が行われない。
【0028】
ステップST405では、想定航跡変更処理部83が、決定したレーダで監視した場合に、目標物の探知が可能な想定航跡を選定し、確定状態に変更する。ここでは、最適待ち受け組み合わせ選定装置8が閾値を有し、閾値と探知性能とを比較することにより、想定航跡上の探知が可能か否かを決定する。なお、閾値は、1つのレーダ制御装置につき1種類でも良いが、想定航跡ごとに閾値を設けたり、レーダの監視覆域ごとに閾値を設けたり、さらには想定航跡ごとでかつ監視覆域ごとに閾値を設けても良い。
さらにステップST406では、評価値計算処理部81が、ステップST405において確定状態に変更された想定航跡に関する重みを変更する。例えば、重みを小さくすれば、式(1)における{(重み)×(探知性能)}を計算する際に、確定状態となった想定航跡上の目標物の探知よりも、未確定状態の想定航跡上の目標物の探知を重視した場合の評価値を得ることができる。
【0029】
ステップST407では、全てのレーダ1が確定状態になったか否かを判断する。全てのレーダ1が確定状態になっていれば処理を終了し、未確定の状態であるレーダ1が存在する場合には、ステップST403からステップST406を繰り返す。例えば、上記の例では、レーダ1Bは未確定状態から確定状態に変更されていないため、ステップST403からステップST406が繰り返される。
【0030】
このように、図4に記載の処理のように、探知性能を重み付けして総合して評価値を計算することにより、各レーダ1が設定すべき監視覆域の組み合わせ、つまり最適解が決定する。
最適待ち受け組み合せ選定装置8にて最適解が決定された後は、各レーダ1に対応する監視覆域の組み合わせd5がレーダ統制装置2に通知される。
レーダ統制装置2は、各レーダ1に対して対応する監視覆域を送信し、各レーダ1は、指示された監視覆域を設定して、目標物の監視を行う。
例えば、上記の例にてレーダ1Aおよびレーダ1Bについて最適解として決定された監視覆域がF(A2)およびF(B1)である場合、最適待ち受け組み合わせ選定装置8はレーダ統制装置2に{F(A2)、F(B1)}を監視覆域の組み合わせd5として通知する。さらに、レーダ統制装置2は、レーダ1Aに対し監視覆域F(A2)を設定するよう指令し、レーダ1Bに対し監視覆域F(B1)を設定するよう指令する。
【0031】
以上のように、この実施の形態1によれば、レーダ制御装置が想定航跡および各レーダのレーダ諸元に基づきレーダ1の監視覆域に関する組み合わせの最適解を計算するので、各レーダが単体の性能を向上させるのではなく、複数のレーダが組み合わされたレーダセットとして効率的な探知性能を実現することができる。
【0032】
実施の形態2.
実施の形態1では、最適待ち受け組み合わせ選定装置8は、グリーディーアルゴリズムを採用しており、一度算出した値から最も評価値が良かった監視覆域を確定させることを繰り返して、監視覆域を一つ一つ確定させていき、最適解を計算していた。しかし、この計算方法では、一つのレーダ1に関して監視覆域を確定した後には、当該レーダ1の監視覆域が変更されることがないため、計算した最適解は監視覆域の組み合わせの中で効率が最も良いとは限らなかった。
この実施の形態2に係るレーダ制御装置は、全ての想定航跡と監視覆域の全ての組み合わせとから探知性能を算出して、その中から最も評価値が良いものを最適解とするものである。
【0033】
実施の形態2に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成に変更を加えたものである。このため、図示を省略するとともに、図1と同一の構成および機能に関する説明を省略する。
【0034】
探知性能算出装置6は、目標物の予想される軌道である想定航跡およびレーダ1のレーダ諸元d1に基づき、レーダ1が設定する監視覆域の全ての組み合わせごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部に相当するものであり、レーダ統制装置2からのレーダ諸元d1および想定航跡データベース5からの想定航跡d3が入力されると、探知性能d4を計算する。以下に詳説する。
第一に、監視覆域の全ての組み合わせを計算する。例えば図3に示すように、レーダが1Aおよび1Bの2種類、かつ各レーダが設定できる監視覆域がF(A1)およびF(A2)、ならびにF(B1)およびF(B2)であるとする。このとき、監視覆域の全ての組み合わせとは、4種類であり、1{F(A1)、F(B1)}、2{F(A1)、F(B2)}、3{F(A2)、F(B1)}、4{F(A2)、F(B2)}となる。
第二に、監視覆域の組み合わせごとで且つ想定航跡t1、t2およびt3ごとに探知性能d4を計算して、これを探知性能データベース7に出力する。
【0035】
また、探知性能データベース7は、探知性能算出装置6から入力された探知性能d4を保持する。
【0036】
さらに、最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得して、監視覆域の組み合わせごとに評価値を計算する。評価値の計算は、式(1)に示す方法と同様であるが重みは全て1とする。なお、実施の形態1では、式(1)の探知性能は1つの監視覆域ごとで且つ想定航跡ごとの探知性能を表しており、評価値は監視覆域ごとに計算されていた。したがって、評価値は未確定状態の監視覆域の数だけ存在した。一方、この実施の形態2では、式(1)の探知性能は監視覆域の組み合わせごとで且つ想定航跡ごとの探知性能を表しており、評価値は監視覆域の組み合わせごとに計算される。このため、実施の形態2における評価値は監視覆域の組み合わせの数だけ存在する。
最適待ち受け組み合わせ選定装置8は、評価値の最も高い監視覆域の組み合わせを採用し、レーダ統制装置2に通知する。
【0037】
以上のように、この実施の形態2によれば、全ての解を列挙しているために必ず最適解が得られ、実施の形態1よりも効率の良い待ち受けを実現することができる。
【0038】
実施の形態3.
実施の形態2では、全ての解を列挙するため、最適待ち受けを計算するための処理時間が非現実的となる可能性があった。
この実施の形態3に係るレーダ制御装置については、最適待ち受け組み合わせ選定装置8が、未確定状態である第1のレーダの全てが確定状態である第2のレーダに変更された後、計算された監視覆域の値を変化させて評価値を再計算し、評価値の向上が停止した時点で監視覆域の値の変化を停止することを特徴とするものであり、具体的には、実施の形態1において計算した最適解を評価関数を用いて変化させて最適解を求めるものである。
【0039】
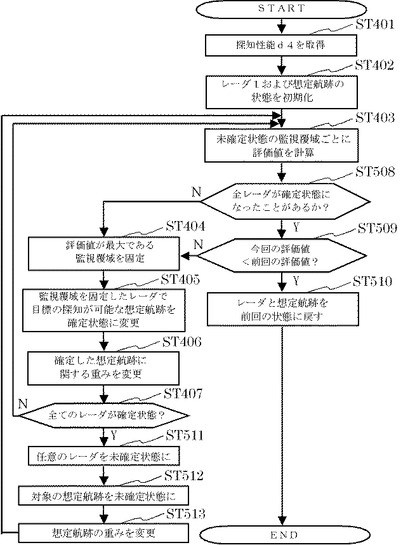
図5は、この発明の実施の形態3に係る最適待ち受け組み合わせ選定装置8がグリーディーアルゴリズムにて監視覆域の組み合わせを確定するとともに、最適解を変化させて解を求める方法を示したフローである。
図5において、図4に示す実施の形態1における最適待ち受け組み合わせ選定装置8と同一の動作には同一の符号を付し、その説明は省略する。
【0040】
最適待ち受け組み合わせ選定装置8は、ステップST401からST403にて未確定状態の監視覆域ごとに評価値を計算する。
次にステップST508にて過去に全てのレーダが確定状態になったことがあるか否かを判断する。過去に全てのレーダが確定状態になったことがない場合には、ステップST404からST407にて全てのレーダ1が確定状態になるまでステップST403からST406を繰り返す。
【0041】
ステップST407にて全てのレーダ1が確定状態になると、ステップST511にて、確定状態であったレーダのうちの任意のレーダ1を未確定状態に変更し、ステップST512にて、未確定状態に変更されたレーダ1により目標物の探知が可能であると判断されていた想定航跡を確定状態から未確定状態に変更する。なお、図5のステップST512では、未確定状態に変更されたレーダ1により目標物の探知が可能であると判断されていた想定航跡を「対象の想定航跡」と記載している。
さらに、ステップST513にて、未確定状態に変更された想定航跡に関する重みを変更する。重みは式(1)における{(重み)×(探知性能)}に影響するので、例えば重みを大きくすれば、未確定状態の想定航跡上の目標物の探知を重視した場合の評価値を得ることができる。
【0042】
その後、ステップST403にて評価値を計算してステップST508に進む。この時点では、全てのレーダが確定状態となったことがあるので、ステップST509に進む。
ステップST509では、今回の変更された評価値と、それに対応する前回の評価値とを比較する。「今回の変更された評価値」とは、ステップST509に進む直前にステップST403で計算した評価値である。また、「それに対応する前回の評価値」とは、ステップST509に進む直前にステップST511で未確定状態に変更されたレーダ1について、ステップST404にて監視覆域が固定されたときの評価値である。
【0043】
ステップST509にて、今回の評価値が前回の評価値よりも大きい場合には、ステップST404に進む。ここでは、ステップST511にて確定状態のレーダを未確定状態に変更して再計算したことにより解が最適解に近づいたものと考えられ、ステップST404に進む処理は評価値をさらに変更して最適解を求めるべく再計算を繰り返すために行うものである。
また、今回の評価値が前回の評価値よりも小さい場合には、ステップST510にて、ステップST511およびST512にて未確定状態に変更される前のレーダの状態および想定航跡の状態に戻した後、処理を終了する。ここでは、レーダ1の状態を変更したことにより解が最適解から離れたものと考えられ、ステップST510はレーダの状態を直前の状態に戻して再計算処理を終了することを示すものである。
【0044】
このように、最適待ち受け組み合わせ選定装置8は、グリーディーアルゴリズムを用いて求めた最適解を変化させ、今回の評価値が前回の評価値を上回る限り処理を続け、評価関数の向上が見込めなくなった時に処理を終了する方法を採用する。この処理終了時の解を最終的な最適解として、レーダ統制装置2に監視覆域の組み合わせd5をレーダ統制装置2に通知する。
【0045】
以上のように、この実施の形態3によれば、グリーディーアルゴリズムと改善法とを採用して最終的な最適解を計算するため、実施の形態1よりも処理時間が長くなるものの、計算時間が現実的ものとなり、かつ、最適または準最適解を得ることができる。
【0046】
実施の形態4.
実施の形態1から3では、各レーダ1を固定レーダとして探知性能等を計算していたが、各レーダ1は移動レーダとしてもよい。
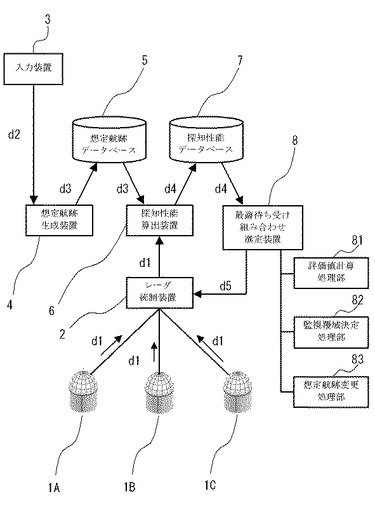
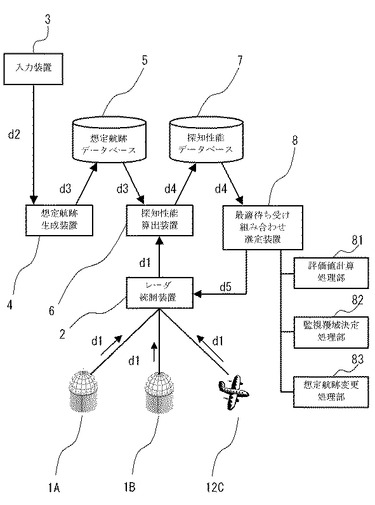
図6は、この発明の実施の形態4に係るレーダ制御装置の構成図である。実施の形態4に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成図におけるレーダ1A、1Bおよび1Cを移動可能レーダ11A、11Bおよび11C(以降、レーダ11A、11Bおよび11Cを総じてレーダ11と称する)に置き換えたものである。なお、図6において、図1と同一の構成には同一の符号を付し、その説明は省略する。
【0047】
図6におけるレーダ11は、移動して位置座標を変更することができるものであり、探知性能を算出する場合や目標物を探知する場合などの稼動時には固定するものである。以降に実施の形態4に係るレーダ制御装置の動作を説明する。
【0048】
レーダ11が移動を終了して設置位置を固定すると、各レーダ11は固定した位置におけるレーダ諸元d1をレーダ統制装置2に出力する。
続けてレーダ統制装置2は各レーダ11のレーダ諸元d1を探知性能算出装置6に出力し、探知性能算出装置6は受信した新たなレーダ諸元d1、および想定航跡データベース5から取得した想定航跡d3に基づき、探知性能d4を計算する。以降の動作は、実施の形態1に係るレーダ制御装置の動作と同様である。
【0049】
以上のように、実施の形態4に係るレーダ制御装置によれば、レーダ11が移動を終了した後に、最適待ち受け組み合わせ選定装置8が最適解を改めて計算するため、レーダ11を移動させた後も効率的な探知性能を実現することができる。
【0050】
さらに、レーダ11の位置を複数回変更した場合、変更するごとにそれぞれの最適解を保持しておき、保持した複数の最適解に基づき、最も探知効率の良い最適解を選定しても良い。具体的には、例えばレーダ統制装置2がレーダ11の設置座標とこの時の最適解とを保持しておき、レーダ装置統制装置2が保持している最適解の内、評価値の最も高い最適解を選定する。さらに選定した最適解を構成するレーダの監視覆域を各レーダに送信するとともに、選定した最適解に対応するレーダ11の位置に移動するよう、各レーダ11に指令する。
各レーダ11は、指示された位置、および監視覆域にて目標物を監視する。
以上のようにすれば、各レーダをどこに移動させるべきかに対する解を得ることが可能となる。
【0051】
実施の形態5.
実施の形態4においては、レーダ11A、11Bおよび11Cを固定させていたが、この実施の形態5では、レーダを固定せずに移動し続ける場合を想定する。
図7は、この発明の実施の形態5に係るレーダ制御装置の構成図である。実施の形態5に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成図におけるレーダ1Cを、移動し続けるレーダ12C(以降、レーダ12Cと称する)に置き換えたものである。なお、図7において、図1と同一の構成には同一の符号を付し、その説明は省略する。
【0052】
このレーダ12Cは、航路が既知であるとともに定期的に移動するレーダである。例えば、航空機がある円軌道を行い続けるとして、円軌道上の所定の位置における各種レーダ諸元を考慮して探知性能を算出し、レーダ諸元および円軌道パラメータに関する最適解を計算したりしてもよい。ただしこの場合、3次元的な移動が可能となり、また、円軌道であったとしても円のサイズなど各種パラメータが存在するため、グリーディーアルゴリズムを用いても解を算出するのに膨大な時間が必要となる可能性がある。
【0053】
実施の形態6.
実施の形態1から5では、最適解を算出した後は、各レーダは選定された監視覆域で目標物を監視していた。この実施の形態6では、各レーダのレーダ諸元が変化した場合を考える。例えば、レーダが故障した場合や天候が変更した場合、レーダの諸元が変化する。
図8は、この発明の実施の形態6に係るレーダ制御装置の構成図である。実施の形態6に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置に、外部からのレーダ諸元d1の入力を受け付けて現レーダ諸元として保持するレーダ諸元保持部であるレーダ諸元保持装置9を加えたものである。なお、図8において、図1と同一の構成には同一の符号を付し、その説明は省略する。ところで、実施の形態6においても、最適待ち受け組み合わせ選定装置8は、実施の形態1と同様、評価値計算処理部81、監視覆域決定処理部82および想定航跡変更処理部83を備えているが、説明の便宜上省略する。
【0054】
以降に実施の形態6に係るレーダ制御装置の動作を説明する。
レーダ統制装置2は、各レーダ1からレーダ諸元d1を受信すると、レーダ諸元d1を探知性能算出装置6に出力するとともに、レーダ諸元保持装置9にも出力する。レーダ諸元保持装置9は入力されたレーダ諸元d1をレーダに対応させて内部に保持する。その後の最適解の算出動作は、実施の形態1に係るレーダ制御装置と同じである。
次に、複数のレーダのうち、いずれかのレーダ1のレーダ諸元が変化した場合、レーダ諸元が変化したレーダ1は、変化したレーダ諸元d1をレーダ統制装置2に出力する。
【0055】
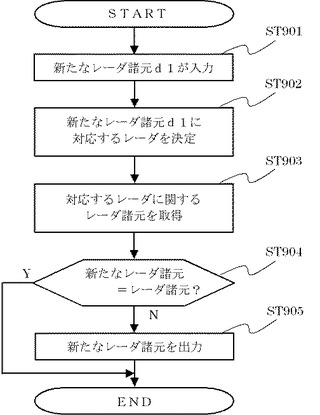
図9は、この発明の実施の形態6に係るレーダ統制装置2が、新たなレーダ諸元d1を受信した場合の動作を示すフローである。
レーダ統制装置2は、ステップST901にてレーダ1から新たなレーダ諸元d1が入力されると、ステップST902にて新たなレーダ諸元d1に対応するレーダ、つまり新たなレーダ諸元d1を出力したレーダ1を割り出して決定する。ステップST903にて、決定したレーダに関するレーダ諸元をレーダ諸元保持装置9から取得し、ステップST904にて新たなレーダ諸元と取得したレーダ諸元とを比較する。
ステップST904の比較にて新たなレーダ諸元と取得したレーダ諸元とが同じであれば、処理を終了する。新たなレーダ諸元と取得したレーダ諸元とが異なる場合には、ステップST905にて新たなレーダ諸元d1を探知性能算出装置6に出力するとともに、レーダ諸元保持装置9に新たなレーダ諸元d1を出力する。
【0056】
レーダ諸元保持装置9は、新たなレーダ諸元d1が入力されると、対応するレーダ1のレーダ諸元を入力された新たなレーダ諸元d1に現レーダ諸元として置き換える。
また、探知性能算出装置6は、新たなレーダ諸元d1に関して探知性能d4を計算して探知性能データベース7に出力する。
最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得して最適待ち受け組み合わせを算出する。探知性能算出装置6および最適待ち受け組み合わせ選定装置8の動作は、実施の形態1と同様である。
なお、探知性能算出装置6が新たなデータ諸元d1について、改めて探知性能d4を計算しているため、最適待ち受け組み合わせ選定装置8が最適解を計算するときには、レーダ諸元d1が変化した後の状態についての最適解を計算している。
【0057】
なお、上記の説明では、図9のステップST904にて新たなレーダ諸元と現レーダ諸元とが異なる場合に、探知性能算出装置6や最適待ち受け組み合わせ選定装置8がレーダ諸元を新たなレーダ諸元に置き換えて探知性能や最適待ち受けの組み合わせの監視覆域の再計算をしていたが、所定の条件下ではレーダ諸元の置き換えや再計算を行わなくても良い。例えば、新たなレーダ諸元d1が異常な値である場合や、新たなレーダ諸元と現レーダ諸元の値の差が微小である場合などである。
【0058】
以上のように、この発明の実施の形態6によれば、レーダ諸元d1が変化する度に最適待ち受け組み合わせを再計算するため、レーダ1の状態が常に反映された監視覆域の組み合わせが最適となった待ち受けを実現することができる。
【図面の簡単な説明】
【0059】
【図1】この発明の実施の形態1に係るレーダ制御装置の構成図である。
【図2】この発明の実施の形態1における想定航跡を説明するための図である。
【図3】この発明の実施の形態1における評価値を説明するための図である。
【図4】この発明の実施の形態1において最適待ち受け組み合わせ選定装置8の動作を説明するフロー図である。
【図5】この発明の実施の形態3において最適待ち受け組み合わせ選定装置8の動作を説明するフロー図である。
【図6】この発明の実施の形態4に係るレーダ制御装置の構成図である。
【図7】この発明の実施の形態5に係るレーダ制御装置の構成図である。
【図8】この発明の実施の形態6に係るレーダ制御装置の構成図である。
【図9】この発明の実施の形態6に係るレーダ統制装置2の動作を説明するフロー図である。
【符号の説明】
【0060】
1 レーダ 2レーダ統制装置 6 探知性能算出装置 8最適待ち受け組み合わせ選定装置 d1 レーダ諸元 d3 想定航跡 d4 探知性能
【技術分野】
【0001】
この発明は、航空機やミサイル等の目標物を探知するためにレーダの監視覆域を計算するレーダ制御装置およびこれを用いたネットワークレーダに関する。
【背景技術】
【0002】
従来、複数のレーダをネットワークで連結したネットワークレーダにおいては、レーダ制御装置が中央管理装置として各レーダを制御していた。例えば、特許文献1では、ネットワークレーダを構成するレーダの一つが自然条件の変動等で性能劣化した場合、レーダ制御装置は性能劣化したレーダを補うべく、他のレーダに監視覆域を変更する指示をして、ネットワークレーダ全体の性能を確保しようとしていた。
また、特許文献2では、レーダ制御装置は各レーダから得られたデータを統括してデータ処理を行なうとともに、位相を制御した送信信号を各レーダに送信していた。
【0003】
【特許文献1】特開2001−174547(第4頁、図3)
【特許文献2】特開2002−277533(第4頁、図1)
【0004】
ネットワークレーダにおいては、対象エリアを効率的に監視するため、目標物の出現確率の高いエリア(以降、「重点エリア」と称する)を集中的に監視すべく、レーダ制御装置がレーダを操作すれば、さらに効率的な監視を実現することができる。
しかし、特許文献1では、レーダ制御装置は、レーダの一つが性能劣化してはじめてレーダの監視覆域を変更しているだけであり、重点エリアを集中的に監視しているわけではない。なお、特許文献1では、1つのレーダが目標物を追尾している際に追尾範囲の外になってしまった場合、レーダ制御装置が隣のレーダにキューイング、つまり目標物の位置等の情報を与え、隣のレーダに目標物を検出させる動作をしている。しかし、この動作は、既に検出して追尾している目標物に関する情報をレーダに与えて、このレーダに目標物を検出させるだけであり、目標物を検出するために両レーダを効率的に動作させているわけではない。
また、特許文献2でも、レーダ制御装置はレーダの性能に応じて各レーダの監視覆域を制御していることはもちろん、重点エリアを集中的に監視していることもない。
【0005】
特許文献1および2のように対象エリアを平均的に監視すると、重点エリア以外のエリアにおいて、目標探知確率が必要以上に高くなったリソース割り振りになるなど、必要以上のレーダの動作リソースを割り振る可能性がある。
また、対象エリアが広い場合には、レーダの監視覆域の1スキャンに必要な時間を意味するデータレートが大きくなったり、いずれのレーダでも目標物の監視ができないような状態、いわゆる「抜け」が発生したりするなどの問題が生じる可能性もある。
【発明の開示】
【発明が解決しようとする課題】
【0006】
この発明は、上記のような課題を解決するためになされたもので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係るレーダ制御装置は、監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であり、目標物の想定航跡およびレーダ諸元に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部、探知性能に基づきレーダそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部、および待ち受け組み合わせ計算部が計算した監視覆域の設定をレーダごとに指示するレーダ統制部を備えたことを特徴とする。なお、レーダは所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【0008】
また、この発明に係るレーダ制御装置は、監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であり、目標物の想定航跡およびレーダのレーダ諸元に基づき、レーダが設定する監視覆域の全ての組み合わせごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部、探知性能に基づきレーダそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部、および待ち受け組み合わせ計算部が計算した監視覆域の設定をレーダごとに指示するレーダ統制部を備えたことを特徴とする。なお、レーダは所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
【発明の効果】
【0009】
この発明によれば、レーダ制御装置が監視覆域の探知性能に基づきレーダそれぞれが設定する監視覆域を決定するとともに、決定した監視覆域をレーダごとに指示するので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることができる。
【0010】
また、この発明によれば、レーダ制御装置が監視覆域の組み合わせごとの探知性能に基づきレーダそれぞれが設定する監視覆域を決定するとともに、決定した監視覆域をレーダごとに指示するので、監視対象エリアを効率的に監視するネットワークレーダを構築して制御するレーダ制御装置を得ることができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
図1は、この発明の実施の形態1に係るレーダ制御装置の構成図である。レーダ制御装置は、待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部であるレーダ統制装置2、入力装置3、想定航跡生成装置4、想定航跡データベース5、目標物の予想される軌道である想定航跡およびレーダ1A、1Bおよび1Cのレーダ諸元に基づき、監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部である探知性能算出装置6、探知性能データベース7および探知性能に基づきレーダ1A、1Bおよび1Cそれぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部である最適待ち受け組み合わせ選定装置8を備えている。また、レーダ制御装置には監視覆域を設定するレーダ1A、1Bおよび1Cが接続している。
以降、説明の便宜上、レーダ1A、1Bおよび1Cを総じて説明する際にはレーダ1と称する。
【0012】
レーダ1は、既知の座標に設置された固定レーダであり、各レーダ1は、送受信タイミング、精度、探知範囲や探知確率などで示される探知に関する探知性能、および追尾に関する追尾性能など、レーダ1の機能や性能に関する諸元d1(以降、「レーダ諸元d1」と称す)をレーダ統制装置2に出力する。
【0013】
レーダ統制装置2は、レーダ1からレーダ諸元d1を受信して探知性能算出装置6に出力するとともに、最適待ち受け組み合わせ選定装置8から入力された各レーダ1の監視覆域の情報に基づき各レーダ1に監視覆域の設定を指示する。
【0014】
入力装置3は、事前情報d2が入力されるとこの事前情報d2を想定航跡生成装置4に出力する。事前情報とは、目標物の機種情報や目標物の出現しそうなエリア情報等であり、具体的には、飛行機や例えばTBMなどのミサイルと言った目標物に関する飛行諸元、目標物が出現しそうな位置や目標物が発射されると予想される位置(以降、「始点」と称する)、例えばミサイルの着弾予想点のような目標物の到着予想地点(以降、「終点」と称する)を示すものである。
さらに具体的に説明すると、想定航跡生成装置4は、目標物が航空機の場合には発射点となる航空基地を始点に、攻撃対象となる我が国の航空基地を終点とした想定航跡を作成したり、目標物がTBMの場合にはTBM発射基地等を始点に、東京等の大都市を着弾点である終点とした想定航跡を生成したりする。
【0015】
想定航跡生成装置4は、入力装置3から入力された事前情報d2に基づいて、想定航跡d3を計算して想定航跡データベース5に出力する。想定航跡とは、目標物の種類、始点および終点に基づいて計算されるものである。
図2は、この発明の実施の形態1において想定航跡d3の概念を説明する図である。ここでは、目標物aに関して、予想される始点としてPs(a1)およびPs(a2)の2点があり、予想される終点としてPe(a1)、Pe(a2)およびPe(a3)の3点がある場合を例に挙げる。始点と終点、および目標物aの諸元があれば、目標物aの軌道を予想することができ、図2では、予想される軌道のパターンをt1、t2、・・・t6としている。
上記の例のように、想定航跡生成装置4は、始点と終点との全ての組み合わせおよび目標物aの諸元を考慮して、目標物aの軌道t1、t2、・・・t6を想定航跡d3として計算する。なお、目標物a、目標物b・・・のように複数の目標物を想定する場合も、上記の例と同様に想定航跡d3を計算する。
【0016】
想定航跡データベース5は、想定航跡生成装置4から入力された想定航跡d3を保持する。また、探知性能算出装置6に想定航跡d3を出力する。
【0017】
ところで、この実施の形態1では、想定航跡生成装置4は入力された事前情報d2に基づき想定航跡d3を計算して想定航跡データベース5に出力していたが、入力装置3には事前情報d2が入力される替わりに、予め計算した想定航跡d3が入力されるようにして良く、入力装置3は入力された想定航跡d3を想定航跡データベース5に直接出力しても良い。この場合、想定航跡生成装置4が不要となる。
また、想定航跡データベース5も備えずに、入力装置3から想定航跡d3を探知性能算出装置6に直接出力しても良い。この場合、探知性能算出装置6は、想定航跡d3が入力されるたびに後述の方法で探知性能を計算することになる。
【0018】
探知性能算出装置6は、第一に、レーダ統制装置2から入力されたレーダ諸元d1を元に、各レーダ1について設定可能な監視覆域のケースを計算する。これにより、全てのレーダ1に関する監視覆域の全ケースが計算される。
第二に、監視覆域の全ケースにおいて、想定航跡データベース5から入手した全ての想定航跡d3に対する探知性能を算出する。探知性能とは、各想定航跡d3上の目標物を探知するまでにかかる時間や探知確率等を示す。
探知性能算出装置6は、算出した探知性能d4を探知性能データベース7に出力する。
【0019】
探知性能データベース7は、探知性能算出装置6から入力された探知性能d4を保持する。また、最適待ち受け組み合わせ選定装置8に探知性能d4を出力する。
【0020】
最適待ち受け組み合わせ選定装置8は、監視覆域ごとで且つ想定航跡ごとの探知性能に基づき、目標物の探知が不可能である第1の想定航跡と目標物の探知が可能である第2の想定航跡とに応じて探知性能に付加する重みを変更し、重みを付加した探知性能を総合することにより、レーダのうち設定される監視覆域が未決定である第1のレーダが設定する監視覆域ごとの評価値を計算する評価値計算処理部81、第1のレーダに設定される監視覆域を評価値が最大である監視覆域に決定するとともに、監視覆域が決定された第1のレーダを第2のレーダに変更する監視覆域決定処理部82および第1のレーダから変更された第2のレーダにより目標物の探知が可能であると判断された第1の想定航跡を第2の想定航跡に変更する想定航跡変更処理部83とを備え、探知性能データベース7から入手した探知性能d4に基づき、各レーダ1をどの性能でどの方向にどのタイミングで待ち受けるのが最適な待ち受けとなるかの組み合わせを求める。
【0021】
次に、具体的な動作を説明する。
なお、事前情報d2が入力装置3を介して想定航跡生成装置4に入力されると、想定航跡生成装置4は、予め、事前情報d2に基づいて想定航跡d3を計算して、この想定航跡d3を想定航跡データベース5に出力する。
この後、想定航跡データベース5は入力された想定航跡d3を保持している。
【0022】
各レーダ1は各自のレーダ諸元d1をレーダ統制装置2へ出力すると、レーダ統制装置2は、各レーダ1から入力されたそれぞれのレーダ諸元d1を探知性能算出装置6に出力する。
探知性能算出装置6は、想定航跡データベース5から想定航跡d3を取得し、各想定航跡d3に対して、監視覆域ごとに探知性能d4を算出し、探知性能データベース7に出力する。探知性能d4の算出方法について以下に詳説する。
【0023】
例として、レーダ1が2つであり、レーダ1Aおよび1Bとした場合の探知性能の計算方法を説明する。
図3は、この発明の実施の形態1において探知性能d4の概念について説明する図である。レーダ1Aは、自らのレーダ諸元に従い監視覆域を変化させることができ、複数のパターンの監視領域を形成して目標物を監視することができる。ここでは、レーダ1Aが2パターンF(A1)、F(A2)の監視覆域を設定する場合を考える。また、レーダ1Bについてもレーダ1Aと同様であり、ここでは、レーダ1Bが2パターンF(B1)、F(B2)の監視覆域を設定する場合を考える。
また、想定航跡d3は、t1、t2およびt3の3種類からなるものとする。
探知性能算出装置6は、想定航跡の1つであるt1に関して、全ての監視覆域F(A1)、F(A2)、F(B1)およびF(B2)について探知性能を計算する。具体的には、想定航跡t1上の目標物が始点を出発してから監視覆域F(A1)、F(A2)、F(B1)およびF(B2)を設定するレーダが探知するまでに掛かる時間や探知確率等を探知性能ef1、ef2、ef3およびef4とする。また、想定航跡t2およびt3についても、t1の場合と同様の探知性能を計算し、ef5、・・・ef12とする。以下では、探知性能の値が大きいと探知性能が良いものとして説明する。
この例のように、探知性能算出装置6は、想定航跡d3ごとで且つ監視覆域ごとに探知性能を計算し、これらを探知性能d4として探知性能データベース7に出力する。
この後、探知性能データベース7は入力された探知性能d4を保持する。
【0024】
最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得し、各レーダ1における監視覆域の最適な組み合わせを計算する。
最適待ち受け組み合わせ選定装置8は、各想定航跡に対して探知性能の良い監視覆域を、当該レーダが待ち受け状態として設定すべき監視覆域として選択し、全レーダに関しても同様に設定すべき監視覆域を選択すれば、監視覆域に関する最適な組み合わせを算出することができる。
上記のような監視覆域に関する最適な組み合わせを計算する方式として、この実施の形態1では、グリーディーアルゴリズムの考え方に基づく方式を採用する。グリーディーアルゴリズムは、著名な最適化問題である集合被覆問題に対する解法として優れていることが分かっている。全探索などを行うと監視覆域に関する組み合わせの最適な解が得られるが、その反面、レーダ1の監視覆域の数や想定航跡d3の数によっては、最適な監視覆域の組み合わせを導くまでに現実的でない膨大な時間が掛かる可能性がある。このグリーディーアルゴリズムは、単純な処理の実行で優れた解を短時間で得ることができる。以降、この監視覆域に関する組み合わせを示しグリーディーアルゴリズムに基づく解を最適解と呼ぶ。以下にグリーディーアルゴリズムに基づく計算方法を説明する。
【0025】
図4は、この発明の実施の形態1に係る最適待ち受け組み合わせ選定装置8がグリーディーアルゴリズムを採用して、監視覆域の最適な組み合わせを計算する方法を示したフローである。
まず、ステップST401にて探知性能データベース7から探知性能d4を取得する。ステップST401は、監視覆域の最適な組み合わせを計算する時点で実行しても良く、予め実行しておいても良い。
ステップST402にて、全てのレーダ1および想定航跡t1、t2およびt3の状態を初期化する。状態とは、「確定」および「未確定」のいずれかの状態を示す。具体的には、レーダ1は、設定する監視覆域が未決定である第1のレーダである「未確定状態」のレーダと、設定する監視覆域が決定されている第2のレーダである「確定状態」のレーダとに分類される。また、想定航跡は、当該想定航跡上の目標物が確定状態のレーダ1により探知が不可能である第1の想定航跡である「未確定状態」の想定航跡と、当該想定航跡上の目標物が確定状態のレーダ1により探知が可能となる第2の想定航跡である「確定状態」の想定航跡とに分類される。
【0026】
ステップST403では、評価値計算処理部81が、監視覆域ごとに下記の式(1)に示す方法で評価値を計算する。
(評価値)=Σ想定航跡{(重み)×(探知性能)} ・・・式(1)
監視覆域F(A1)を例に挙げて説明する。なお、現時点でレーダ1Aは未確定状態、想定航跡t1、t2およびt3も未確定状態であるものとする。最適待ち受け組み合わせ選定装置8は、F(A1)における想定航跡ごとの探知性能を、想定航跡に対して重み付けして総合したものをF(A1)の評価値とする。具体的には、図3では、ef1に重みを付加したもの、ef5に重みを付加したものおよびef9に重みを付加して積算したものを監視覆域F(A1)の評価値ev(A1)とする。監視覆域F(A2)も、上記と同様に計算し、評価値ev(A2)を計算する。
また、レーダ1Bの監視覆域である監視覆域F(B1)およびF(B2)に関しても、式(1)に従い評価値を計算する。
【0027】
次にステップST404では、監視覆域決定処理部82が、最も高い評価値を持つ監視覆域を選択し、この選択した監視覆域を選択した監視覆域が属するレーダが設定すべき監視覆域として決定するとともに、監視覆域を決定したレーダを確定状態に変更する。例えば、評価値ev(A1)、ev(A2)、ev(B1)およびev(B2)のうち、ev(A2)が最も高い場合には、レーダ1Aが設定すべき監視覆域をF(A2)に決定し、レーダ1Aを確定状態に変更する。レーダ1が確定状態になると、以降は当該レーダ1に関しての評価値計算処理部81の式(1)による評価値の計算が行われない。
【0028】
ステップST405では、想定航跡変更処理部83が、決定したレーダで監視した場合に、目標物の探知が可能な想定航跡を選定し、確定状態に変更する。ここでは、最適待ち受け組み合わせ選定装置8が閾値を有し、閾値と探知性能とを比較することにより、想定航跡上の探知が可能か否かを決定する。なお、閾値は、1つのレーダ制御装置につき1種類でも良いが、想定航跡ごとに閾値を設けたり、レーダの監視覆域ごとに閾値を設けたり、さらには想定航跡ごとでかつ監視覆域ごとに閾値を設けても良い。
さらにステップST406では、評価値計算処理部81が、ステップST405において確定状態に変更された想定航跡に関する重みを変更する。例えば、重みを小さくすれば、式(1)における{(重み)×(探知性能)}を計算する際に、確定状態となった想定航跡上の目標物の探知よりも、未確定状態の想定航跡上の目標物の探知を重視した場合の評価値を得ることができる。
【0029】
ステップST407では、全てのレーダ1が確定状態になったか否かを判断する。全てのレーダ1が確定状態になっていれば処理を終了し、未確定の状態であるレーダ1が存在する場合には、ステップST403からステップST406を繰り返す。例えば、上記の例では、レーダ1Bは未確定状態から確定状態に変更されていないため、ステップST403からステップST406が繰り返される。
【0030】
このように、図4に記載の処理のように、探知性能を重み付けして総合して評価値を計算することにより、各レーダ1が設定すべき監視覆域の組み合わせ、つまり最適解が決定する。
最適待ち受け組み合せ選定装置8にて最適解が決定された後は、各レーダ1に対応する監視覆域の組み合わせd5がレーダ統制装置2に通知される。
レーダ統制装置2は、各レーダ1に対して対応する監視覆域を送信し、各レーダ1は、指示された監視覆域を設定して、目標物の監視を行う。
例えば、上記の例にてレーダ1Aおよびレーダ1Bについて最適解として決定された監視覆域がF(A2)およびF(B1)である場合、最適待ち受け組み合わせ選定装置8はレーダ統制装置2に{F(A2)、F(B1)}を監視覆域の組み合わせd5として通知する。さらに、レーダ統制装置2は、レーダ1Aに対し監視覆域F(A2)を設定するよう指令し、レーダ1Bに対し監視覆域F(B1)を設定するよう指令する。
【0031】
以上のように、この実施の形態1によれば、レーダ制御装置が想定航跡および各レーダのレーダ諸元に基づきレーダ1の監視覆域に関する組み合わせの最適解を計算するので、各レーダが単体の性能を向上させるのではなく、複数のレーダが組み合わされたレーダセットとして効率的な探知性能を実現することができる。
【0032】
実施の形態2.
実施の形態1では、最適待ち受け組み合わせ選定装置8は、グリーディーアルゴリズムを採用しており、一度算出した値から最も評価値が良かった監視覆域を確定させることを繰り返して、監視覆域を一つ一つ確定させていき、最適解を計算していた。しかし、この計算方法では、一つのレーダ1に関して監視覆域を確定した後には、当該レーダ1の監視覆域が変更されることがないため、計算した最適解は監視覆域の組み合わせの中で効率が最も良いとは限らなかった。
この実施の形態2に係るレーダ制御装置は、全ての想定航跡と監視覆域の全ての組み合わせとから探知性能を算出して、その中から最も評価値が良いものを最適解とするものである。
【0033】
実施の形態2に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成に変更を加えたものである。このため、図示を省略するとともに、図1と同一の構成および機能に関する説明を省略する。
【0034】
探知性能算出装置6は、目標物の予想される軌道である想定航跡およびレーダ1のレーダ諸元d1に基づき、レーダ1が設定する監視覆域の全ての組み合わせごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能を算出する探知性能算出部に相当するものであり、レーダ統制装置2からのレーダ諸元d1および想定航跡データベース5からの想定航跡d3が入力されると、探知性能d4を計算する。以下に詳説する。
第一に、監視覆域の全ての組み合わせを計算する。例えば図3に示すように、レーダが1Aおよび1Bの2種類、かつ各レーダが設定できる監視覆域がF(A1)およびF(A2)、ならびにF(B1)およびF(B2)であるとする。このとき、監視覆域の全ての組み合わせとは、4種類であり、1{F(A1)、F(B1)}、2{F(A1)、F(B2)}、3{F(A2)、F(B1)}、4{F(A2)、F(B2)}となる。
第二に、監視覆域の組み合わせごとで且つ想定航跡t1、t2およびt3ごとに探知性能d4を計算して、これを探知性能データベース7に出力する。
【0035】
また、探知性能データベース7は、探知性能算出装置6から入力された探知性能d4を保持する。
【0036】
さらに、最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得して、監視覆域の組み合わせごとに評価値を計算する。評価値の計算は、式(1)に示す方法と同様であるが重みは全て1とする。なお、実施の形態1では、式(1)の探知性能は1つの監視覆域ごとで且つ想定航跡ごとの探知性能を表しており、評価値は監視覆域ごとに計算されていた。したがって、評価値は未確定状態の監視覆域の数だけ存在した。一方、この実施の形態2では、式(1)の探知性能は監視覆域の組み合わせごとで且つ想定航跡ごとの探知性能を表しており、評価値は監視覆域の組み合わせごとに計算される。このため、実施の形態2における評価値は監視覆域の組み合わせの数だけ存在する。
最適待ち受け組み合わせ選定装置8は、評価値の最も高い監視覆域の組み合わせを採用し、レーダ統制装置2に通知する。
【0037】
以上のように、この実施の形態2によれば、全ての解を列挙しているために必ず最適解が得られ、実施の形態1よりも効率の良い待ち受けを実現することができる。
【0038】
実施の形態3.
実施の形態2では、全ての解を列挙するため、最適待ち受けを計算するための処理時間が非現実的となる可能性があった。
この実施の形態3に係るレーダ制御装置については、最適待ち受け組み合わせ選定装置8が、未確定状態である第1のレーダの全てが確定状態である第2のレーダに変更された後、計算された監視覆域の値を変化させて評価値を再計算し、評価値の向上が停止した時点で監視覆域の値の変化を停止することを特徴とするものであり、具体的には、実施の形態1において計算した最適解を評価関数を用いて変化させて最適解を求めるものである。
【0039】
図5は、この発明の実施の形態3に係る最適待ち受け組み合わせ選定装置8がグリーディーアルゴリズムにて監視覆域の組み合わせを確定するとともに、最適解を変化させて解を求める方法を示したフローである。
図5において、図4に示す実施の形態1における最適待ち受け組み合わせ選定装置8と同一の動作には同一の符号を付し、その説明は省略する。
【0040】
最適待ち受け組み合わせ選定装置8は、ステップST401からST403にて未確定状態の監視覆域ごとに評価値を計算する。
次にステップST508にて過去に全てのレーダが確定状態になったことがあるか否かを判断する。過去に全てのレーダが確定状態になったことがない場合には、ステップST404からST407にて全てのレーダ1が確定状態になるまでステップST403からST406を繰り返す。
【0041】
ステップST407にて全てのレーダ1が確定状態になると、ステップST511にて、確定状態であったレーダのうちの任意のレーダ1を未確定状態に変更し、ステップST512にて、未確定状態に変更されたレーダ1により目標物の探知が可能であると判断されていた想定航跡を確定状態から未確定状態に変更する。なお、図5のステップST512では、未確定状態に変更されたレーダ1により目標物の探知が可能であると判断されていた想定航跡を「対象の想定航跡」と記載している。
さらに、ステップST513にて、未確定状態に変更された想定航跡に関する重みを変更する。重みは式(1)における{(重み)×(探知性能)}に影響するので、例えば重みを大きくすれば、未確定状態の想定航跡上の目標物の探知を重視した場合の評価値を得ることができる。
【0042】
その後、ステップST403にて評価値を計算してステップST508に進む。この時点では、全てのレーダが確定状態となったことがあるので、ステップST509に進む。
ステップST509では、今回の変更された評価値と、それに対応する前回の評価値とを比較する。「今回の変更された評価値」とは、ステップST509に進む直前にステップST403で計算した評価値である。また、「それに対応する前回の評価値」とは、ステップST509に進む直前にステップST511で未確定状態に変更されたレーダ1について、ステップST404にて監視覆域が固定されたときの評価値である。
【0043】
ステップST509にて、今回の評価値が前回の評価値よりも大きい場合には、ステップST404に進む。ここでは、ステップST511にて確定状態のレーダを未確定状態に変更して再計算したことにより解が最適解に近づいたものと考えられ、ステップST404に進む処理は評価値をさらに変更して最適解を求めるべく再計算を繰り返すために行うものである。
また、今回の評価値が前回の評価値よりも小さい場合には、ステップST510にて、ステップST511およびST512にて未確定状態に変更される前のレーダの状態および想定航跡の状態に戻した後、処理を終了する。ここでは、レーダ1の状態を変更したことにより解が最適解から離れたものと考えられ、ステップST510はレーダの状態を直前の状態に戻して再計算処理を終了することを示すものである。
【0044】
このように、最適待ち受け組み合わせ選定装置8は、グリーディーアルゴリズムを用いて求めた最適解を変化させ、今回の評価値が前回の評価値を上回る限り処理を続け、評価関数の向上が見込めなくなった時に処理を終了する方法を採用する。この処理終了時の解を最終的な最適解として、レーダ統制装置2に監視覆域の組み合わせd5をレーダ統制装置2に通知する。
【0045】
以上のように、この実施の形態3によれば、グリーディーアルゴリズムと改善法とを採用して最終的な最適解を計算するため、実施の形態1よりも処理時間が長くなるものの、計算時間が現実的ものとなり、かつ、最適または準最適解を得ることができる。
【0046】
実施の形態4.
実施の形態1から3では、各レーダ1を固定レーダとして探知性能等を計算していたが、各レーダ1は移動レーダとしてもよい。
図6は、この発明の実施の形態4に係るレーダ制御装置の構成図である。実施の形態4に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成図におけるレーダ1A、1Bおよび1Cを移動可能レーダ11A、11Bおよび11C(以降、レーダ11A、11Bおよび11Cを総じてレーダ11と称する)に置き換えたものである。なお、図6において、図1と同一の構成には同一の符号を付し、その説明は省略する。
【0047】
図6におけるレーダ11は、移動して位置座標を変更することができるものであり、探知性能を算出する場合や目標物を探知する場合などの稼動時には固定するものである。以降に実施の形態4に係るレーダ制御装置の動作を説明する。
【0048】
レーダ11が移動を終了して設置位置を固定すると、各レーダ11は固定した位置におけるレーダ諸元d1をレーダ統制装置2に出力する。
続けてレーダ統制装置2は各レーダ11のレーダ諸元d1を探知性能算出装置6に出力し、探知性能算出装置6は受信した新たなレーダ諸元d1、および想定航跡データベース5から取得した想定航跡d3に基づき、探知性能d4を計算する。以降の動作は、実施の形態1に係るレーダ制御装置の動作と同様である。
【0049】
以上のように、実施の形態4に係るレーダ制御装置によれば、レーダ11が移動を終了した後に、最適待ち受け組み合わせ選定装置8が最適解を改めて計算するため、レーダ11を移動させた後も効率的な探知性能を実現することができる。
【0050】
さらに、レーダ11の位置を複数回変更した場合、変更するごとにそれぞれの最適解を保持しておき、保持した複数の最適解に基づき、最も探知効率の良い最適解を選定しても良い。具体的には、例えばレーダ統制装置2がレーダ11の設置座標とこの時の最適解とを保持しておき、レーダ装置統制装置2が保持している最適解の内、評価値の最も高い最適解を選定する。さらに選定した最適解を構成するレーダの監視覆域を各レーダに送信するとともに、選定した最適解に対応するレーダ11の位置に移動するよう、各レーダ11に指令する。
各レーダ11は、指示された位置、および監視覆域にて目標物を監視する。
以上のようにすれば、各レーダをどこに移動させるべきかに対する解を得ることが可能となる。
【0051】
実施の形態5.
実施の形態4においては、レーダ11A、11Bおよび11Cを固定させていたが、この実施の形態5では、レーダを固定せずに移動し続ける場合を想定する。
図7は、この発明の実施の形態5に係るレーダ制御装置の構成図である。実施の形態5に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置の構成図におけるレーダ1Cを、移動し続けるレーダ12C(以降、レーダ12Cと称する)に置き換えたものである。なお、図7において、図1と同一の構成には同一の符号を付し、その説明は省略する。
【0052】
このレーダ12Cは、航路が既知であるとともに定期的に移動するレーダである。例えば、航空機がある円軌道を行い続けるとして、円軌道上の所定の位置における各種レーダ諸元を考慮して探知性能を算出し、レーダ諸元および円軌道パラメータに関する最適解を計算したりしてもよい。ただしこの場合、3次元的な移動が可能となり、また、円軌道であったとしても円のサイズなど各種パラメータが存在するため、グリーディーアルゴリズムを用いても解を算出するのに膨大な時間が必要となる可能性がある。
【0053】
実施の形態6.
実施の形態1から5では、最適解を算出した後は、各レーダは選定された監視覆域で目標物を監視していた。この実施の形態6では、各レーダのレーダ諸元が変化した場合を考える。例えば、レーダが故障した場合や天候が変更した場合、レーダの諸元が変化する。
図8は、この発明の実施の形態6に係るレーダ制御装置の構成図である。実施の形態6に係るレーダ制御装置は、図1に示す実施の形態1に係るレーダ制御装置に、外部からのレーダ諸元d1の入力を受け付けて現レーダ諸元として保持するレーダ諸元保持部であるレーダ諸元保持装置9を加えたものである。なお、図8において、図1と同一の構成には同一の符号を付し、その説明は省略する。ところで、実施の形態6においても、最適待ち受け組み合わせ選定装置8は、実施の形態1と同様、評価値計算処理部81、監視覆域決定処理部82および想定航跡変更処理部83を備えているが、説明の便宜上省略する。
【0054】
以降に実施の形態6に係るレーダ制御装置の動作を説明する。
レーダ統制装置2は、各レーダ1からレーダ諸元d1を受信すると、レーダ諸元d1を探知性能算出装置6に出力するとともに、レーダ諸元保持装置9にも出力する。レーダ諸元保持装置9は入力されたレーダ諸元d1をレーダに対応させて内部に保持する。その後の最適解の算出動作は、実施の形態1に係るレーダ制御装置と同じである。
次に、複数のレーダのうち、いずれかのレーダ1のレーダ諸元が変化した場合、レーダ諸元が変化したレーダ1は、変化したレーダ諸元d1をレーダ統制装置2に出力する。
【0055】
図9は、この発明の実施の形態6に係るレーダ統制装置2が、新たなレーダ諸元d1を受信した場合の動作を示すフローである。
レーダ統制装置2は、ステップST901にてレーダ1から新たなレーダ諸元d1が入力されると、ステップST902にて新たなレーダ諸元d1に対応するレーダ、つまり新たなレーダ諸元d1を出力したレーダ1を割り出して決定する。ステップST903にて、決定したレーダに関するレーダ諸元をレーダ諸元保持装置9から取得し、ステップST904にて新たなレーダ諸元と取得したレーダ諸元とを比較する。
ステップST904の比較にて新たなレーダ諸元と取得したレーダ諸元とが同じであれば、処理を終了する。新たなレーダ諸元と取得したレーダ諸元とが異なる場合には、ステップST905にて新たなレーダ諸元d1を探知性能算出装置6に出力するとともに、レーダ諸元保持装置9に新たなレーダ諸元d1を出力する。
【0056】
レーダ諸元保持装置9は、新たなレーダ諸元d1が入力されると、対応するレーダ1のレーダ諸元を入力された新たなレーダ諸元d1に現レーダ諸元として置き換える。
また、探知性能算出装置6は、新たなレーダ諸元d1に関して探知性能d4を計算して探知性能データベース7に出力する。
最適待ち受け組み合わせ選定装置8は、探知性能データベース7から探知性能d4を取得して最適待ち受け組み合わせを算出する。探知性能算出装置6および最適待ち受け組み合わせ選定装置8の動作は、実施の形態1と同様である。
なお、探知性能算出装置6が新たなデータ諸元d1について、改めて探知性能d4を計算しているため、最適待ち受け組み合わせ選定装置8が最適解を計算するときには、レーダ諸元d1が変化した後の状態についての最適解を計算している。
【0057】
なお、上記の説明では、図9のステップST904にて新たなレーダ諸元と現レーダ諸元とが異なる場合に、探知性能算出装置6や最適待ち受け組み合わせ選定装置8がレーダ諸元を新たなレーダ諸元に置き換えて探知性能や最適待ち受けの組み合わせの監視覆域の再計算をしていたが、所定の条件下ではレーダ諸元の置き換えや再計算を行わなくても良い。例えば、新たなレーダ諸元d1が異常な値である場合や、新たなレーダ諸元と現レーダ諸元の値の差が微小である場合などである。
【0058】
以上のように、この発明の実施の形態6によれば、レーダ諸元d1が変化する度に最適待ち受け組み合わせを再計算するため、レーダ1の状態が常に反映された監視覆域の組み合わせが最適となった待ち受けを実現することができる。
【図面の簡単な説明】
【0059】
【図1】この発明の実施の形態1に係るレーダ制御装置の構成図である。
【図2】この発明の実施の形態1における想定航跡を説明するための図である。
【図3】この発明の実施の形態1における評価値を説明するための図である。
【図4】この発明の実施の形態1において最適待ち受け組み合わせ選定装置8の動作を説明するフロー図である。
【図5】この発明の実施の形態3において最適待ち受け組み合わせ選定装置8の動作を説明するフロー図である。
【図6】この発明の実施の形態4に係るレーダ制御装置の構成図である。
【図7】この発明の実施の形態5に係るレーダ制御装置の構成図である。
【図8】この発明の実施の形態6に係るレーダ制御装置の構成図である。
【図9】この発明の実施の形態6に係るレーダ統制装置2の動作を説明するフロー図である。
【符号の説明】
【0060】
1 レーダ 2レーダ統制装置 6 探知性能算出装置 8最適待ち受け組み合わせ選定装置 d1 レーダ諸元 d3 想定航跡 d4 探知性能
【特許請求の範囲】
【請求項1】
監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であって、
目標物の予想される軌道である想定航跡および前記レーダのレーダ諸元に基づき、前記監視覆域ごとで且つ前記想定航跡ごとに前記想定航跡上の前記目標物の探知性能を算出する探知性能算出部、
前記探知性能に基づき前記レーダそれぞれが設定する前記監視覆域を計算する待ち受け組み合わせ計算部、
前記待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部
を備えたレーダ制御装置。
【請求項2】
待ち受け組み合わせ計算部は、
監視覆域ごとで且つ想定航跡ごとの探知性能に基づき、目標物の探知が不可能である第1の想定航跡と目標物の探知が可能である第2の想定航跡とに応じて探知性能に付加する重みを変更し、前記重みを付加した前記探知性能を総合することによりレーダのうち設定される監視覆域が未決定である第1のレーダが設定する監視覆域ごとの評価値を計算する評価値計算処理部と、
前記第1のレーダに設定される監視覆域を前記評価値が最大である前記監視覆域に決定するとともに、前記監視覆域が決定された前記第1のレーダを第2のレーダに変更する監視覆域決定処理部と、
前記第1のレーダから変更された前記第2のレーダにより目標物の探知が可能であると判断された前記第1の想定航跡を第2の想定航跡に変更する想定航跡変更処理部と
を備えたことを特徴とする請求項1に記載のレーダ制御装置。
【請求項3】
待ち受け組み合わせ計算部は、第1のレーダの全てが第2のレーダに変更された後、
計算された監視覆域の値を変化させて評価値を再計算し、前記評価値の向上が停止した時点で監視覆域の値の変化を停止することを特徴とする請求項2に記載のレーダ制御装置。
【請求項4】
想定航跡変更処理部は、目標物の探知時間または探知確率に基づき、前記目標物の探知が可能か否かを判断することを特徴とする請求項2または3のいずれか1項に記載のレーダ制御装置。
【請求項5】
監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であって、
目標物の予想される軌道である想定航跡および前記レーダのレーダ諸元に基づき、前記レーダが設定する前記監視覆域の全ての組み合わせごとで且つ前記想定航跡ごとに前記想定航跡上の前記目標物の探知性能を算出する探知性能算出部、
前記探知性能に基づき前記レーダそれぞれが設定する前記監視覆域を計算する待ち受け組み合わせ計算部、
前記待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部
を備えたレーダ制御装置。
【請求項6】
待ち受け組み合わせ計算部は、探知性能に基づき監視覆域の組み合わせごとの評価値を計算するとともに、前記評価値が最大である前記監視覆域の組み合わせをレーダそれぞれが設定する監視覆域とすることを特徴とする請求項5に記載のレーダ制御装置。
【請求項7】
レーダ諸元の外部からの入力を受け付けて現レーダ諸元として保持するレーダ諸元保持部を備え、
同一のレーダに関して入力された新たなレーダ諸元が前記現レーダ諸元と異なる場合、前記現レーダ諸元を前記の新たなレーダ諸元に置き換えるとともに、前記新たなレーダ諸元を探知性能算出部に出力することを特徴とする請求項1または請求項5のいずれか1項に記載のレーダ制御装置。
【請求項8】
監視覆域がそれぞれ設定されてレーダ諸元を出力する複数のレーダ、
前記レーダのレーダ諸元に基づき前記レーダごとに監視覆域の設定を指示する請求項1から7のいずれか1項に記載のレーダ制御装置
を備えたネットワークレーダ。
【請求項1】
監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であって、
目標物の予想される軌道である想定航跡および前記レーダのレーダ諸元に基づき、前記監視覆域ごとで且つ前記想定航跡ごとに前記想定航跡上の前記目標物の探知性能を算出する探知性能算出部、
前記探知性能に基づき前記レーダそれぞれが設定する前記監視覆域を計算する待ち受け組み合わせ計算部、
前記待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部
を備えたレーダ制御装置。
【請求項2】
待ち受け組み合わせ計算部は、
監視覆域ごとで且つ想定航跡ごとの探知性能に基づき、目標物の探知が不可能である第1の想定航跡と目標物の探知が可能である第2の想定航跡とに応じて探知性能に付加する重みを変更し、前記重みを付加した前記探知性能を総合することによりレーダのうち設定される監視覆域が未決定である第1のレーダが設定する監視覆域ごとの評価値を計算する評価値計算処理部と、
前記第1のレーダに設定される監視覆域を前記評価値が最大である前記監視覆域に決定するとともに、前記監視覆域が決定された前記第1のレーダを第2のレーダに変更する監視覆域決定処理部と、
前記第1のレーダから変更された前記第2のレーダにより目標物の探知が可能であると判断された前記第1の想定航跡を第2の想定航跡に変更する想定航跡変更処理部と
を備えたことを特徴とする請求項1に記載のレーダ制御装置。
【請求項3】
待ち受け組み合わせ計算部は、第1のレーダの全てが第2のレーダに変更された後、
計算された監視覆域の値を変化させて評価値を再計算し、前記評価値の向上が停止した時点で監視覆域の値の変化を停止することを特徴とする請求項2に記載のレーダ制御装置。
【請求項4】
想定航跡変更処理部は、目標物の探知時間または探知確率に基づき、前記目標物の探知が可能か否かを判断することを特徴とする請求項2または3のいずれか1項に記載のレーダ制御装置。
【請求項5】
監視覆域がそれぞれ設定される複数のレーダを制御するレーダ制御装置であって、
目標物の予想される軌道である想定航跡および前記レーダのレーダ諸元に基づき、前記レーダが設定する前記監視覆域の全ての組み合わせごとで且つ前記想定航跡ごとに前記想定航跡上の前記目標物の探知性能を算出する探知性能算出部、
前記探知性能に基づき前記レーダそれぞれが設定する前記監視覆域を計算する待ち受け組み合わせ計算部、
前記待ち受け組み合わせ計算部が計算した前記監視覆域の設定を前記レーダごとに指示するレーダ統制部
を備えたレーダ制御装置。
【請求項6】
待ち受け組み合わせ計算部は、探知性能に基づき監視覆域の組み合わせごとの評価値を計算するとともに、前記評価値が最大である前記監視覆域の組み合わせをレーダそれぞれが設定する監視覆域とすることを特徴とする請求項5に記載のレーダ制御装置。
【請求項7】
レーダ諸元の外部からの入力を受け付けて現レーダ諸元として保持するレーダ諸元保持部を備え、
同一のレーダに関して入力された新たなレーダ諸元が前記現レーダ諸元と異なる場合、前記現レーダ諸元を前記の新たなレーダ諸元に置き換えるとともに、前記新たなレーダ諸元を探知性能算出部に出力することを特徴とする請求項1または請求項5のいずれか1項に記載のレーダ制御装置。
【請求項8】
監視覆域がそれぞれ設定されてレーダ諸元を出力する複数のレーダ、
前記レーダのレーダ諸元に基づき前記レーダごとに監視覆域の設定を指示する請求項1から7のいずれか1項に記載のレーダ制御装置
を備えたネットワークレーダ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−58269(P2008−58269A)
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願番号】特願2006−238913(P2006−238913)
【出願日】平成18年9月4日(2006.9.4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年3月13日(2008.3.13)
【国際特許分類】
【出願日】平成18年9月4日(2006.9.4)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]