
レーダ干渉回避装置、及びレーダ干渉回避方法
【課題】互いのレーダ装置が干渉するか否かを確実に判断でき、干渉すると判断したときに対策を講じることによって、対象物の正確な情報を測定することのできるレーダ装置を提供する。
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はレーダ装置に関し、より特定的には、車両などの移動体に搭載されるレーダ装置に関する。
【背景技術】
【0002】
近年、自車両などの移動体に搭載され、自車両の周囲の他車両や障害物などの対象物との相対距離、相対速度、及び他車両の存在する方向などの対象物の情報を測定するレーダ装置が実用化されている。このようなレーダ装置では、電磁波を放射してから、放射した電磁波が対象物で反射した反射波を受信するまでの時間、及び放射した電磁波と受信した反射波との位相差などに基づき対象物との相対距離、相対速度、及び他車両の存在する方向などを測定する。尚、このようなレーダ装置としては、電磁波としてレーザー光を照射するものも実用化されている。そして、これらのレーダ装置では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって干渉が生じてしまい、対象物の情報を誤測定してしまうことがある。他車両に搭載されたレーダ装置と自車両に搭載されたレーダ装置とが干渉することを防ぐための技術として、例えば、特許文献1に記載の車載用レーダ装置(以下、従来技術と称する)が一例として挙げられる。
【0003】
従来技術では、干渉していることを検知したときに、電磁波として放射する送信波の中心周波数、変調方式、周波数帯域、及び干渉波を検出するためのしきい値などを変更するなどの対策を講じることにより、干渉したときに発生する誤測定を防いでいる。
【特許文献1】特開2004−170183号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、以下に述べるような課題を有する。すなわち、上記従来技術では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって実際に干渉を起こさない限り、前述の対策を講じることができない。
【0005】
それ故に、本発明は、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信せずとも、干渉する可能性があるか否かを判断でき、干渉する可能性があると判断したときに対策を講じることのできるレーダ干渉回避装置、及び当該装置で実行されるレーダ干渉回避方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記課題を解決するために、以下に示すような特徴を有する。
第1の発明は、放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える。
【0007】
第2の発明は、上記第1の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、判断手段は、自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段を、レーダ情報に基づき特定する領域重複レーダ特定手段を含み、領域重複レーダ特定手段によって特定された他車両のレーダ手段と自車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する。
【0008】
第3の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段が電磁波、及び反射波をそれぞれ放射、及び受信するときの周波数帯域を他車周波数帯域として示す情報を取得し、判断手段は、自車両のレーダ手段が電磁波を放射するとき、及び反射波を受信するときのそれぞれの周波数帯域を示す自車周波数帯域を自車両のレーダ手段の情報に基づき認識する自車周波数認識手段と、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたとき、自車周波数認識手段によって認識された自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を、領域重複レーダ特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき判断する重複周波数判断手段とを含み、重複周波数判断手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があると判断し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び重複周波数特定手段によって特定された他車両のレーダ手段の少なくとも一方に対して、自車周波数帯域と他車周波数帯域とが互いに重複しないように変更する指示を与える。
【0009】
第4の発明は、上記第3の発明に従属する発明であって、通信手段は、他車両のレーダ手段が他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、他車周波数帯域を変更することが不可能な他車両のレーダ手段を、重複周波数特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定する第1の指示対象特定手段を含み、第1の指示対象特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段に対して、重複周波数特定手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する指示を与える。
【0010】
第5の発明は、上記第4の発明に従属する発明であって、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されないとき、重複周波数特定手段によって特定された他車両のレーダ手段に対して、自車周波数帯域、及び互いの他車周波数帯域とそれぞれ重複しない他車周波数帯域に変更する指示を与える。
【0011】
第6の発明は、上記第3の発明に従属する発明であって、指示手段は、判断手段によって干渉すると判断されたとき、自車両のレーダ手段に対して、重複周波数特定手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する指示を与える。
【0012】
第7の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段が、電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す情報を取得し、判断手段は、自車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを示す自車符号パターンを自車両のレーダ手段の情報に基づき認識する自車符号パターン認識手段と、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたとき、自車符号パターン認識手段によって認識された自車符号パターンと略一致する他車符号パターンを重畳した電磁波を放射する他車両のレーダ手段を、領域重複レーダ特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定するパターン特定手段とを含み、パターン特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があると判断し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及びパターン特定手段によって特定された他車両のレーダ手段の少なくともいずれか一方に対して、自車符号パターンと他車符号パターンとが互いに略一致しないよう変更する指示を与える。
【0013】
第8の発明は、上記第7の発明に従属する発明であって、通信手段は、他車両のレーダ手段が他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、他車符号パターンを変更することが不可能な他車両のレーダ手段を、パターン特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定する第2の指示対象特定手段を含み、第2の指示対象特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段に対して、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと略一致しないように変更させる指示を与える。
【0014】
第9の発明は、上記第8の発明に従属する発明であって、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されないとき、パターン特定手段によって特定された他車両のレーダ手段に対して、自車符号パターン、及び互いの他車符号パターンとそれぞれ重複しない他車符号パターンに変更するように指示を与える。
【0015】
第10の発明は、上記第7の発明に従属する発明であって、指示手段は、判断手段によって干渉すると判断されたとき、自車両のレーダ手段に対して、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと略一致しない自車符号パターンに変更する指示を与える。
【0016】
第11の発明は、上記第2の発明に従属する発明であって、領域重複レーダ特定手段は、現在よりも予め定められた期間だけ以前の間の自車側領域に基づき、現在よりも当該予め定められた期間だけ経過したときの自車側領域を推定する自車領域推定手段と、現在よりも予め定められた期間だけ以前の間に通信手段によって取得された他車側領域に基づき、現在よりも当該予め定められた期間だけ経過したときの他車側領域を他車両のレーダ手段に対応付けて推定する他車領域推定手段とを含み、自車領域推定手段によって推定された自車側領域と重複する他車領域推定手段によって推定された他車側領域に対応付けられた他車両のレーダ手段をさらに特定する。
【0017】
第12の発明は、上記第5の発明に従属する発明であって、通信手段は、他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、重複周波数判断手段は、自車両のレーダ手段の位置を示す自車レーダ位置を自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を特定するとき、自車レーダ位置認識手段によって認識された自車レーダ位置と近い他車レーダ位置に存在する他車両のレーダ手段の他車周波数帯域から順番に自車周波数帯域と比較して特定し、指示手段は、他車両のレーダ手段に対して指示を与えるとき、他車レーダ位置の内、自車レーダ位置と近い位置に存在する他車両のレーダ手段から順番に他車周波数帯域を変更する指示を与える。
【0018】
第13の発明は、上記第9の発明に従属する発明であって、通信手段は、他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、パターン特定手段は、自車両のレーダ手段の位置を示す自車レーダ位置を自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、自車符号パターンと略一致する他車符号パターンの他車両のレーダ手段を特定するとき、自車レーダ位置認識手段によって認識された自車レーダ位置と近い他車レーダ位置に存在する他車両のレーダ手段の他車符号パターンから順番に自車符号パターンと比較して特定し、指示手段は、他車両のレーダ手段に対して指示を与えるとき、他車レーダ位置の内、自車レーダ位置と近い位置に存在する他車両のレーダ手段から順番に他車符号パターンを変更する指示を与える。
【0019】
第14の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達する他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達する自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段を、レーダ情報に基づき特定する。
【0020】
第15の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達し、且つ当該他車両が走行している車線の対向車線を含む他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達し、且つ当該自車両が走行している車線の対向車線を含む自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段をレーダ情報に基づき特定する。
【0021】
第16の発明は、放射した電磁波と受信した反射波とに基づき、対象物を測定する自車両、及び他車両のレーダの情報を取得する取得ステップと、取得ステップにおいて取得された自車両のレーダの情報、及び他車両のレーダの情報を示すレーダ情報に基づき、自車両のレーダと他車両のレーダとが互いに干渉する可能性があるか否かを判断する判断ステップと、判断ステップにおいて干渉する可能性があると判断されたとき、自車両のレーダ、及び他車両のレーダの少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示ステップとを備える。
【発明の効果】
【0022】
上記第1の発明によれば、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があるか否かを判断するために必要な他車両のレーダ手段の情報を、通信手段を用いて事前に取得することができる。そして、第1の発明によれば、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することなく、他車両のレーダ手段の情報と自車両のレーダ手段の情報とに基づいて、互いのレーダ手段が干渉する可能性があるか否かの判断をすることができる。また、第1の発明によれば、他車両のレーダ手段の情報と自車両のレーダ手段の情報とに基づき、干渉する可能性があると判断したときに、自車両のレーダ手段と他車両のレーダ手段との少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える対策を講じることができる。
【0023】
上記第2の発明によれば、判断手段に含まれる領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む自車側領域と、他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む他車側領域とに基づき、自車両のレーダ手段から放射される電磁波に干渉する可能性のある電磁波を放射する他車両のレーダ手段を特定する。このため、第2の発明によれば、自車両以外の他車両のレーダ手段の中から、判断手段が干渉する可能性があるか否かを判断をする対象とする必要があるレーダ手段を特定することができる。
【0024】
上記第3の発明によれば、他車両のレーダ手段の電磁波、及び反射波をそれぞれ放射、及び受信するときの他車周波数帯域を他車両のレーダ手段の情報として、通信手段を用いて取得する。そして、重複周波数特定手段は、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたときに、自車両のレーダ手段の電磁波、及び反射波をそれぞれ放射、及び受信するときの自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を特定する。すなわち、自車両のレーダ手段と他車両のレーダ手段との一方から放射された電磁波が他方のレーダ手段に到達したときに干渉する可能性のある電磁波を放射するレーダ手段を、一方から放射された電磁波が到達する前に特定することができる。そして、指示手段は、重複周波数特定手段によって特定された他車両のレーダ手段、及び自車両のレーダ手段の少なくともいずれか一方、すなわち、互いに干渉する可能性のあるレーダ手段の少なくともいずれか一方に対して、互いの周波数帯域が重複しないように変更する指示を与えて、互いのレーダ手段が干渉しないように対策を講じることができる。
【0025】
上記第4の発明によれば、通信手段によって、他車両のレーダ手段が他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得する。そして、第1の指示対象特定手段は、重複周波数特定手段によって特定された他車両のレーダ手段、すなわち、自車両のレーダ手段と干渉する可能性のあるレーダ手段の中から他車周波数帯域を変更することが不可能なレーダ手段を特定する。そして、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されたとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車周波数帯域を変更することが不可能であるときには、自車両のレーダ手段の自車周波数帯域を他車両のレーダ手段の他車周波数と重複しない自車周波数帯域に変更する対策を講じることができる。
【0026】
上記第5の発明によれば、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されないとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車周波数帯域を変更することができるときは、他車両のレーダ手段に対して、自車周波数帯域と重複しない他車周波数帯域に変更する対策を講じることができる。
【0027】
上記第6の発明によれば、指示手段は、判断手段によって干渉する可能性があると判断されたときには、直ちに自車両のレーダ手段の自車周波数帯域を、重複周波数判断手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する対策を講じることができる。
【0028】
上記第7の発明によれば、他車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す他車両のレーダ手段の情報を、通信手段を用いて取得する。そして、パターン特定手段は、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたときに、自車両のレーダ手段が電磁波に重畳して放射する予め定められた符号信号の符号パターンである自車符号パターンと略一致する他車符号パターンの符号信号を重畳した電磁波を放射する他車両のレーダ手段を特定する。すなわち、自車両のレーダ手段と他車両のレーダ手段との一方から放射された電磁波が他方のレーダ手段に到達したときに干渉する可能性のある電磁波を放射するレーダ手段を、一方から放射された電磁波が到達する前に特定する。そして、指示手段は、パターン特定手段によって特定された他車両のレーダ手段、及び自車両のレーダ手段の少なくともいずれか一方、すなわち、互いに干渉する可能性のあるレーダ手段の少なくともいずれか一方に対して、互いの符号パターンが略一致しないように変更する指示を与えて、互いのレーダ手段が干渉しないように対策を講じることができる。
【0029】
上記第8の発明によれば、通信手段によって、他車両のレーダ手段が他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得する。そして、第2の指示対象特定手段は、パターン特定手段によって特定された他車両のレーダ手段、すなわち、自車両のレーダ手段と干渉する可能性のあるレーダ手段の中から他車符号パターンを変更することが不可能なレーダ手段を特定する。そして、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されたとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車符号パターンを変更することが不可能であるときには、自車両のレーダ手段の自車符号パターンを他車両のレーダ手段の他車符号パターンと略一致しない自車符号パターンに変更する対策を講じることができる。
【0030】
上記第9の発明によれば、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されないとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車符号パターンを変更することができるときは、他車両のレーダ手段に対して、自車符号パターンと重複しない他車符号パターンに変更する対策を講じることができる。
【0031】
上記第10の発明によれば、指示手段は、判断手段によって干渉する可能性があると判断されたときには、直ちに自車両のレーダ手段の自車周波数帯域を、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと重複しない他車符号パターンに変更する対策を講じることができる。
【0032】
上記第11の発明によれば、予め定められた期間だけ経過したときの自車側領域と、他車側領域とをそれぞれ推定し、推定した自車側領域と他車側領域とに基づいて、自車両のレーダ手段から放射される電磁波に干渉する可能性のある電磁波を放射する他車両のレーダ手段を特定する。このため、第11の発明によれば、より早く、自車両以外に存在する他車両のレーダ手段の中から、判断手段が干渉する可能性があるか否かを判断する対象とする必要があるレーダ手段を特定することができる。
【0033】
上記第12の発明によれば、重複周波数判断手段は自車両のレーダ手段に近い他車両のレーダ手段の他車周波数帯域から順番に自車周波数帯域と比較して、重複する他車周波数帯域の他車両のレーダ手段を特定し、指示手段は、自車両のレーダ手段の位置と近い位置に存在する他車両のレーダ手段から順番に自車周波数帯域と重複しない他車周波数帯域に変更する指示を与える。このため、重複周波数判断手段、及び指示手段は、それぞれ自車両のレーダ手段に近い位置に存在する他車両のレーダ手段、すなわち、自車両と衝突する危険性がより高いと考えられる他車両のレーダ手段を優先して処理をすることができる。
【0034】
上記第13の発明によれば、パターン特定手段は自車両のレーダ手段に近い他車両のレーダ手段の他車符号パターンから順番に自車符号パターンと比較して、略一致する他車符号パターンの他車両のレーダ手段を特定し、指示手段は、自車両のレーダ手段の位置と近い位置に存在する他車両のレーダ手段から順番に自車符号パターンと重複しない他車符号パターンに変更する指示を与える。このため、パターン特定手段、及び指示手段は、それぞれ自車両のレーダ手段に近い位置に存在する他車両のレーダ手段、すなわち、自車両と衝突する危険性がより高いと考えられる他車両のレーダ手段を優先して処理をすることができる。
【0035】
上記第14の発明によれば、自車両のレーダから放射される電磁波が到達する領域と、他車両のレーダから放射される電磁波が到達する領域とが重複するときに、自車両のレーダと他車両のレーダとが干渉する可能性があるか否かを判断できるため、一方のレーダから放射された電磁波が他方のレーダに到達して実際に干渉が生じる前に、互いのレーダの少なくともいずれか一方に対して放射する電磁波を干渉しない状態に変更することができる。
【0036】
上記第15の発明によれば、自車両と他車両との互いの対向車線を含む自車側領域と、他車側領域とが重複するときに、自車両のレーダと他車両のレーダとが干渉する可能性があるか否かを判断できるため、対向車線を走行する車両に搭載されたレーダとの干渉を回避することができる。
【0037】
また、本発明のレーダ干渉回避方法によれば、上述した本発明に係るレーダ干渉回避装置と同様の効果を得ることができる。
【発明を実施するための最良の形態】
【0038】
(第1の実施形態)
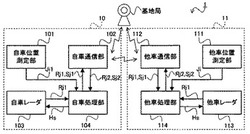
図1は、本発明の第1の実施形態に係るレーダ干渉回避システム1の機能構成を示す機能ブロック図である。レーダ干渉回避システム1は、自車レーダ干渉回避装置10と他車レーダ干渉回避装置11とからなる。まず、自車レーダ干渉回避装置10の機能構成について説明する。自車レーダ干渉回避装置10は、自車両に搭載され、自車位置測定部101と、自車通信部102と、自車レーダ103と、自車処理部104とを備える。
【0039】
自車位置測定部101は、典型的には、一般的に知られているカーナビゲーションシステムなどのGPS(Global Positioning System)であり、衛星から送信される信号に基づいて、自車両の地図上における絶対的な位置(例えば、緯度、及び経度など)を逐次測定し、測定した位置を示す自車位置情報Ji1を生成する。
【0040】
自車通信部102は、典型的には、図示しないアンテナを介して無線通信をする電子回路であり、路上に設置されている基地局を介して無線通信をしたり、他車両と直接無線通信することにより後述する他車通信部112から無線送信される他車レーダ情報Rj2を受信して取得する。また、自車通信部102は、後述する自車レーダ情報Rj1を自車処理部104から取得する。自車通信部102は、路上に設置されている基地局を介して無線通信をしたり、直接無線通信することにより、自車レーダ情報Rj1を他車通信部112へ無線送信する。
【0041】
自車レーダ103は、典型的には、図示しないアンテナを介して電磁波を空間に放射し、放射した電磁波が対象物で反射した反射波を受信するレーダである。自車レーダ103は、電磁波を放射してから反射波を受信するまでの時間差、及び放射した電磁波と受信した反射波との位相差などに基づいて対象物との相対距離や相対速度などを逐次測定する。自車レーダ103は、測定するときに電磁波としてレーザー光を用いて対象物を測定するレーダであってもよい。さらに、自車レーダ103は、対象物が存在する方向の水平面に沿った角度や、鉛直面に沿った角度を測定できるレーダであってもよい。
【0042】
自車レーダ103は、後述する他車両に搭載された他車レーダ113から放射された電磁波を反射波として受信して干渉を受けると、前述の時間差、及び位相差などを誤って検出してしまい、対象物との相対距離や相対速度などを正確に測定できなくなる。自車レーダ103が、他車レーダ113から放射された電磁波を受信して干渉を受けるのは、他車レーダ113から放射された電磁波が自車レーダ103の図示しないアンテナに到達し、且つ自車レーダ103が反射波を受信するときの周波数帯域と、他車レーダ113が放射した電磁波の周波数帯域とが重複するときが一例として考えられる。同様に、他車レーダ113が、自車レーダ103から放射された電磁波を受信して干渉を受けるのは、自車レーダ103から放射された電磁波が他車レーダ113の図示しないアンテナに到達し、且つ他車レーダ113が反射波を受信するときの周波数帯域と、自車レーダ103が放射した電磁波の周波数帯域とが重複するときが一例として考えられる。
【0043】
したがって、自車レーダ103、及び他車レーダ113は、互いに他方から放射される電磁波の周波数帯域と重複しない周波数帯域で、電磁波の放射、及び反射波の受信をすることにより、一方の放射する電磁波が他方のアンテナに到達したとしても、干渉を受けることなく対象物との相対距離や相対速度などを正確に測定できる。そこで、自車レーダ103は、他車レーダ113から干渉を受けることなく測定をするために、後述する自車処理部104から与えられる指示に応じた周波数帯域で対象物の測定をする。尚、自車処理部104が、自車レーダ103に周波数帯域を変更させる指示を与えるときの詳細な処理の説明は後述する。
【0044】
尚、自車レーダ103が、自車処理部104から与えられる指示に応じて反射波を受信するときの周波数帯域を変更するときは、変更後の周波数帯域で反射波を受信できるように、放射する電磁波の周波数帯域も同時に変更する必要がある。つまり、自車レーダ103が反射波を受信するときの周波数帯域を変更するときは、放射する電磁波の周波数帯域も必ず変更する。自車レーダ103と同様に他車レーダ113も、反射波を受信するときの周波数帯域を変更するときは、放射する電磁波の周波数帯域も必ず変更する。以下では、自車レーダ103が反射波を受信するときの周波数帯域、及び電磁波を放射するときの周波数帯域を単に自車周波数帯域と称する。また、他車レーダ113が反射波を受信するときの周波数帯域、及び電磁波を放射するときの周波数帯域を単に他車周波数帯域と称する。
【0045】
また、自車レーダ103には、放射する電磁波が到達する領域を少なくとも含む自車レーダ領域が図示しない記憶部に予め記憶されている。自車レーダ103が図示しない記憶部に記憶する自車レーダ領域は、図2に示すように自車レーダ103が電磁波を放射するときの放射点(例えば、アンテナ、或いは発光素子など)を基準として示される領域である。図2には、一例として、放射点から放射された電磁波が到達する領域を模しており、当該領域を少なくとも含む、放射点を基準とした半径R、角度θの扇形で示される自車レーダ領域を示している。
【0046】
尚、本実施形態では、自車レーダ103の放射点と、反射波を受信する受信点とは同じ位置にあるものとする。すなわち、本実施形態に係る自車レーダ103は、電磁波の放射と、反射波の受信とを1つのアンテナでするものとする。したがって、図2に示す放射点は、受信点の位置でもあり、自車レーダ103が測定に用いるアンテナの搭載位置でもある。ただし、自車レーダ103のアンテナは、実際には、図2に示す放射点で示されるバンパーの内部に搭載されているものとする。尚、他車レーダ113も自車レーダ103と同様に、電磁波の放射と反射波の受信とを1つのアンテナでするものとする。
【0047】
また、自車レーダ103の図示しない記憶部には、自車処理部104から与えられる指示に応じて電磁波の周波数帯域を変更するときのために、複数の自車周波数帯域、及び自車レーダ103が自車周波数帯域を変更することが可能であるか否かを示す自車周波数変更可否情報などを図示しない記憶部に予め記憶している。上述した自車レーダ領域、複数の自車周波数帯域、及び自車周波数変更可否情報は、自車レーダ諸元情報Rg1として、自車レーダ103の図示しない記憶部に予め記憶されている。
【0048】
つまり、自車レーダ103の図示しない記憶部には、自車レーダ103が対象物を測定するときの電磁波の周波数帯域、電磁波の周波数帯域を変更することが可能か否かなどの自車レーダ103の諸元を示す情報が予め記憶されているものとする。さらに、自車レーダ103は、自車レーダ諸元情報Rg1によって示される自車周波数帯域の内、現在使用中の自車周波数帯域を示す情報を当該自車レーダ諸元情報Rg1に含ませ、自車周波数を変更するたびに更新する。
【0049】
尚、自車レーダ諸元情報Rg1によって示される上述した情報は一例であり、自車レーダ諸元情報Rg1はさらに他の情報を示すものであってもよい。また、自車レーダ干渉回避装置10が備える自車レーダ103の数は1台であってもよいし、2以上であってもよい。自車レーダ干渉回避装置10が2以上の自車レーダ103を備える場合としては、自車両が前方、後方、及び側方の複数の方向に存在する対象物をそれぞれ測定する自車レーダ103を搭載する場合が一例として挙げられる。
【0050】
自車処理部104は、典型的には、マイコンなどの演算回路であり、自車位置測定部101によって生成される自車位置情報Ji1、自車通信部102によって取得された他車レーダ情報Rj2、及び自車レーダ103によって記憶されている自車レーダ諸元情報Rg1をそれぞれ取得し、取得した情報に基づき、自車レーダ103と他車レーダ113とが互いに干渉しないように自車レーダ103、及び他車レーダ113の少なくともいずれか一方に対して指示を与える。
【0051】
また、自車処理部104は、それぞれ取得した自車位置情報Ji1、及び自車レーダ諸元情報Rg1に基づいて後述する自車レーダ情報Rj1を生成する。自車処理部104は、自車位置情報Ji1、及び自車レーダ諸元情報Rg1に基づいて生成した情報に自車両に固有の識別子を付与して、自車レーダ情報Rj1を生成する。自車処理部104によって生成された自車レーダ情報Rj1を、上述したように自車通信部102が取得して、他車両に無線送信することにより、他車両に搭載された他車処理部114は自車レーダ情報Rj1を取得することができる。自車処理部104の詳細な処理の説明は後述する。以上が、自車レーダ干渉回避装置10の機能構成の説明である。
【0052】
次に、他車レーダ干渉回避装置11の機能構成について説明する。他車レーダ干渉回避装置11は、他車両に搭載され、他車位置測定部111と、他車通信部112と、他車レーダ113と、他車処理部114とを備える。
【0053】
他車位置測定部111は、典型的には、一般的に知られているカーナビゲーションシステムなどのGPSであり、自車位置測定部101と同様に、他車両の地図上における絶対的な位置(例えば、緯度、及び経度)を逐次測定し、測定した位置を示す他車位置情報Ji2を生成する。
【0054】
他車通信部112は、典型的には、図示しないアンテナを介して無線通信をする電子回路である。他車通信部112は、後述する他車レーダ情報Rj2を他車処理部114から取得する。他車通信部112は、上述した自車通信部102と同様に無線通信をすることにより、取得した他車レーダ情報Rj2を自車通信部102へ無線送信する。また、他車通信部112は、上述したように自車通信部102から無線送信される自車レーダ情報Rj1を受信して取得する。
【0055】
他車レーダ113は、典型的には、図示しないアンテナを介して電磁波を空間に放射し、放射した電磁波が対象物で反射した反射波を受信するレーダである。他車レーダ113は、自車レーダ103と同様に対象物との相対距離や相対速度などを逐次測定する。他車レーダ113も自車レーダ103と同様に、測定するときに電磁波としてレーザー光を用いて対象物を測定してもよい。
【0056】
他車レーダ113は、上述した自車レーダ103と同様に、自車レーダ103から干渉を受けることなく測定をする必要があるために、後述する他車処理部114から与えられる指示に応じた周波数帯域で対象物の測定をする。尚、他車処理部114が、他車レーダ113に周波数帯域を重複しないように変更させる指示を与えるときの詳細な処理の説明は、自車処理部104の処理の説明と共に後述する。
【0057】
また、他車レーダ113には、上述した自車レーダ領域、自車周波数帯域、及び自車周波数変更可否情報と同様の情報をそれぞれ他車レーダ113について示す、他車レーダ領域、他車周波数帯域、及び他車周波数変更可否情報などが、自車レーダ103と同様に図示しない記憶部に他車レーダ諸元情報Rg2として予め記憶されている。
【0058】
他車レーダ113が変更できる他車周波数帯域の数は、必ずしも自車レーダ103と同じでなくてもよいし、他車周波数帯域を変更できなくてもよい。また、他車レーダ干渉回避装置11が備える他車レーダ113の数は1台であってもよいし、2以上であってもよい。他車レーダ干渉回避装置11が2以上の他車レーダ113を備える場合としては、他車両が前方、後方、及び側方の複数の方向に存在する対象物をそれぞれ測定する他車レーダ113を搭載する場合が一例として挙げられる。また、他車レーダ113は、対象物が存在する方向の水平面に沿った角度や、鉛直面に沿った角度を測定できるレーダであってもよい。
【0059】
他車処理部114は、典型的には、マイコンなどの演算回路であり、他車位置測定部111によって生成される他車位置情報Ji2、他車通信部112によって取得された自車レーダ情報Rj1、及び他車レーダ113によって生成された他車レーダ諸元情報Rg2をそれぞれ取得し、取得した情報に基づき、他車レーダ113と自車レーダ103とが互いに干渉しないように自車処理部104と同様の処理をする。
【0060】
また、他車処理部114は、それぞれ取得した他車位置情報Ji2、及び他車レーダ諸元情報Rg2に基づいて後述する他車レーダ情報Rj2を生成する。他車処理部114は、他車位置情報Ji2、及び他車レーダ諸元情報Rg2に基づいて生成した情報に他車レーダ113を搭載している他車両に固有の識別子を付与して、他車レーダ情報Rj2を生成する。他車処理部114によって生成された他車レーダ情報Rj2を、上述したように他車通信部112が取得して、自車両に無線送信することにより、自車両に搭載された自車処理部104は他車レーダ情報Rj2を取得することができる。以上が、他車レーダ干渉回避装置11の機能構成の説明である。
【0061】
次に、自車処理部104の詳細な処理の説明をする。図3は、ある時刻において自車両C1の対向車線を他車両C2が走行しており、自車両C1の前方に他車両C3が先行しているとき位置関係の一例を示す図である。自車両C1は、上述した自車レーダ干渉回避装置10を搭載しているものとする。また、他車両C2、及び他車両C3は、上述した他車レーダ干渉回避装置11をそれぞれ搭載しているものとする。尚、本実施形態に係る他車処理部114は、自車処理部104と同一の処理をする。
【0062】
自車両C1は、前方に存在する対象物を測定する自車レーダ103を備えており、図3に示す自車レーダ領域T1は、自車レーダ103に予め記憶されている自車レーダ領域を示している。また、他車両C2は、前方に存在する対象物を測定する他車レーダ113を備えており、図3に示す他車レーダ領域T2は、他車レーダ113に予め記憶されている他車レーダ領域を示している。また、他車両C3は、後方に存在する対象物を測定する他車レーダ113aと、前方に存在する対象物を測定する他車レーダ113bを備えており、図3に示す他車レーダ領域T3a、及び他車レーダ領域T3bは、それぞれ他車レーダ113a、及び他車レーダ113bにそれぞれ予め記憶されている他車レーダ領域を示している。尚、他車両C3に搭載される他車レーダ干渉回避装置11は、2つの他車レーダ113a、及び他車レーダ113bが1つの他車処理部114に接続されているものとする。以下では、自車両C1、他車両C2、及び他車両C3の位置関係が図3に示すものであるとして説明を続ける。
【0063】
まず、自車両C1に搭載された自車処理部104は、自車位置測定部101によって生成された自車位置情報Ji1と、自車レーダ103の図示しない記憶部に記憶されている自車レーダ諸元情報Rg1とをそれぞれ取得する。自車レーダ諸元情報Rg1を取得すると、自車処理部104は、取得した自車レーダ諸元情報Rg1によって示される自車レーダ領域と、取得した自車位置情報Ji1とに基づき、アンテナの搭載位置を基準として示される自車レーダ領域を地図上における絶対的な座標で示される自車レーダ領域T1(例えば、緯度、及び経度で示される領域)へ変換する演算をする。
【0064】
より具体的には、自車処理部104には、自車位置測定部101によって測定される自車両C1の位置と、自車レーダ領域の基準となるアンテナの搭載位置との相対的な位置関係が図示しない記憶部に予め定められている。自車処理部104は、自車位置情報Ji1を取得すると、取得した自車位置情報Ji1と、前述の相対的な位置関係とに基づき、自車レーダ103から取得した自車レーダ諸元情報Rg1に示される自車レーダ領域を地図上における絶対的な座標で示される自車レーダ領域T1に変換する演算をする。自車処理部104が、自車レーダ103に記憶されている自車レーダ領域を地図上における絶対的な座標で示される領域に変換する方法は、任意の方法であってよい。以下では、自車レーダ領域T1、他車レーダ領域T2、他車レーダ領域T3a、及び他車レーダ領域T3bは、それぞれ地図上の絶対的な座標で示される領域であるものとして説明を続ける。
【0065】
自車レーダ領域T1を演算すると、自車処理部104は、取得した自車レーダ諸元情報Rg1によって示される複数の自車周波数帯域、自車周波数帯域変更可否情報、取得した自車位置情報Ji1、及び演算した自車レーダ領域T1をそれぞれ示す自車レーダ情報Rj1を生成する。自車レーダ情報Rj1を生成するとき、自車処理部104は、上述したように当該自車レーダ情報Rj1によって示される情報に自車両に固有の識別子を含ませて自車レーダ情報Rj1を生成する。また、自車処理部104によって生成される自車レーダ情報Rj1には、上述したように自車レーダ103によって自車レーダ諸元情報Rg1に含まされた現在使用中の自車周波数帯域を示す情報も含まれる。自車処理部104によって生成された自車レーダ情報Rj1は、自車処理部104の図示しない記憶部に記憶されると同時に自車通信部102によって取得され、上述したように無線送信される。
【0066】
上述したように、他車両C2に搭載された他車処理部114も自車処理部104と同様の処理をする。すなわち、他車両C2の他車処理部114にも他車位置測定部111によって測定される他車両C2の位置と、他車レーダ領域の基準となる位置との相対的な位置関係が図示しない記憶部に予め定められている。そして、他車処理部114は、自車処理部104と同様に他車レーダ領域を地図上の絶対的な座標で示される他車レーダ領域T2へ変換する演算をする。
【0067】
さらに、他車両C2に搭載された他車処理部114は、他車レーダ領域T2を演算すると、上述した自車レーダ情報Rj1と同様の情報を他車両C2に搭載された他車レーダ113について示す他車レーダ情報Rj2を生成する。他車レーダ情報Rj2を生成するとき、他車処理部114は、自車処理部104と同様に、当該他車レーダ情報Rj2によって示される情報に当該他車処理部114を搭載している車両に固有の識別子を付加する。また、他車処理部114によって生成される他車レーダ情報Rj2には、上述した自車レーダ103と同様に他車レーダ113によって他車レーダ諸元情報Rg2に含まされた現在使用中の他車周波数帯域を示す情報も含まれる。他車処理部114によって生成された他車レーダ情報Rj2は、他車処理部114の図示しない記憶部に記憶されると同時に他車通信部112によって取得され、上述したように自車通信部102に無線送信される。
【0068】
他車両C3に搭載された他車処理部114も他車両C2に搭載された他車処理部114と同様の処理をする。他車両C3に搭載された他車処理部114は、他車レーダ113a、及び他車レーダ113bからそれぞれ取得した他車レーダ諸元情報Rg2に示されている他車レーダ領域を、地図上の絶対的な座標で示される他車レーダ領域T3a、及び他車レーダ領域T3bへそれぞれ変換する演算をする。そして、他車両C3に搭載された他車処理部114は、他車レーダ領域T3a、及び他車レーダ領域T3bをそれぞれ演算すると、自車レーダ情報Rj1と同様の情報を他車両C3に搭載された他車レーダ113a、及び他車レーダ113bについて示す他車レーダ情報Rj2を生成する。このとき、他車両C3に搭載された他車処理部114は、他車レーダ113a、及び他車レーダ113bの2つのレーダの情報をそれぞれ示す2つの他車レーダ情報Rj2(a)、及び他車レーダ情報Rj2(a)を生成する。他車両C3に搭載される他車処理部114によって生成された他車レーダ情報Rj2は、他車処理部114の図示しない記憶部に記憶されると同時に他車通信部112によって取得され、上述したように自車通信部102に無線送信される。
【0069】
それぞれの他車両の他車レーダ干渉回避装置11に備えられる他車通信部112によって無線送信された他車レーダ情報Rj2は、自車通信部102を介して、自車処理部104によって取得される。尚、自車通信部102が無線通信をする通信網には、自車レーダ情報Rj1、及び他車レーダ情報Rj2を含むあらゆる情報が伝送されており、自車通信部102は、これらの情報を逐次取得し、取得した情報の中から他車レーダ情報Rj2によって示される他車位置情報Ji2に基づき、自車位置情報Ji1を基準とする予め定められた範囲(以下、取得範囲と称する)以内に存在する他車両の他車レーダ情報Rj2のみを選択するものとする。
【0070】
また、他車両C2に搭載されている他車通信部112も自車通信部102と同様に、無線通信をする通信網に伝送されているあらゆる情報を逐次取得し、取得した情報の中から他車レーダ情報Rj2によって示される他車位置情報Ji2に基づき、他車通信部112を搭載しているそれぞれの他車両の他車位置情報Ji2を基準とする取得範囲以内に存在する他車両の他車レーダ情報Rj2を選択するものとする。尚、他車両C2に搭載されている他車通信部112によって選択される情報には、他車レーダ情報Rj2だけでなく、他車両C2から見た他車両、すなわち、自車両C1の自車レーダ情報Rj1も含まれる。つまり、他車両C2の搭載位置を基準とする取得範囲内に自車両C1が存在するとき、他車通信部112は、自車両C1の自車レーダ情報Rj1も選択して取得する。他車両C3に搭載されている他車通信部112も、他車両C2に搭載されている他車通信部112と同様に、自車レーダ情報Rj1、及び他車レーダ情報Rj2を選択して取得する。
【0071】
本実施形態では、一例として、自車両C1、他車両C2、及び他車両C3が、それぞれ互いに前述の取得範囲内に存在するものとして説明を続ける。つまり、自車処理部104は、自車通信部102を介して、他車両C2から無線送信された他車レーダ情報Rj2と他車両C3から無線送信された他車レーダ情報Rj2とをそれぞれ取得する。尚、前述の取得範囲は、自車通信部102、及び互いの他車通信部112の間で、互いに同じ範囲であってもよいし、互いに異なる範囲であってもよい。
【0072】
自車処理部104は、自車通信部102を介してそれぞれの他車両の他車レーダ情報Rj2を取得すると、既に図示しない記憶部に記憶した自車レーダ情報Rj1と、取得した他車レーダ情報Rj2とをレーダ情報Shとして纏めて記憶する。図4は、自車処理部104が図示しない記憶部に記憶するレーダ情報Shの一例を示す図である。本実施形態では、自車両C1の自車処理部104によって生成された自車レーダ情報Rj1と、他車両C2の他車処理部114によって生成された他車レーダ情報Rj2と、他車両C3の他車処理部114によって生成された他車レーダ情報Rj2とがレーダ情報Shに含まれる。尚、図4に示すアスタリスクは、レーダ情報Shに含まれる情報がそれぞれ生成されたときにおいて、自車レーダ103と、他車両C2の他車レーダ113と、他車両C3の他車レーダ113(他車レーダ113a、及び113b)とがそれぞれ使用している周波数帯域を示す。
【0073】
上述したように、自車両C1、他車両C2、及び他車両C3が、それぞれ互いに前述の取得範囲内に存在するため、他車両C2に搭載された他車処理部114も自車処理部104と同様に、他車通信部112を介して、自車両C1の自車通信部102から無線送信された自車レーダ情報Rj1と、他車両C3の他車通信部112から無線送信された他車レーダ情報Rj2とを受信して取得する。そして、他車両C2に搭載された他車処理部114は、取得した自車レーダ情報Rj1と、他車両C3の他車レーダ情報Rj2と、既に当該他車両C2の他車処理部114によって生成された他車レーダ情報Rj2とをレーダ情報Shとして記憶する。このため、他車両C2に搭載された他車処理部114も、自車処理部104に記憶されているレーダ情報Shと同じレーダ情報Shを記憶する。他車両C3に搭載された他車処理部114も、他車両C2に搭載された他車処理部114と同様に、自車処理部104に記憶されているレーダ情報Shと同じレーダ情報Shを記憶する。
【0074】
レーダ情報Shを記憶すると、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114のそれぞれは、記憶したレーダ情報Shに含まれる識別子IC1乃至IC3を比較する。そして、自車処理部104、及びそれぞれの他車処理部114は、識別子IC1乃至IC3をそれぞれ比較した結果に基づき、レーダの干渉を回避するための処理を実行する指示処理部を自車処理部104、及びそれぞれの他車処理部114の中から判断する。
【0075】
自車処理部104、及びそれぞれの他車処理部114が、識別子IC1乃至IC3に基づいて指示処理部を判断する方法は、任意の方法を用いて構わない。それぞれの処理部が指示処理部を判断する方法の一例としては、それぞれの処理部を搭載する車両の製造番号の数字を前述の識別子とし、それぞれの処理部が、識別子IC1乃至IC3の中から最も小さい製造番号の数字を示す識別子に対応する車両に搭載された処理部(自車処理部104、或いは他車処理部114)を指示処理部として判断する方法を用いてもよい。自車処理部104、及び他車処理部114が共に識別子IC1乃至IC3の中から最も小さい数字を示す識別子に対応する車両に搭載された処理部を判断することによって、互いの処理部の間で一致した指示処理部を一意に定めることができる。以下では、自車両C1の識別子IC1によって示される数字が最も小さく、自車処理部104が指示処理部として処理を進めるものとして説明を続ける。尚、識別子の判断の結果によって指示処理部が定まると、指示処理部として定まらなかった処理部は、それぞれ指示処理部として定めた処理部、すなわち、自車処理部104から後述する指示情報Sj1を与えられるまで待機するものとする。
【0076】
自車処理部104は、指示処理部として処理を開始すると、レーダ情報Shに基づいて自車レーダ103と干渉する可能性のある他車レーダ113を特定する処理を開始する。本実施形態において、自車レーダ103と干渉する可能性のある他車レーダ113とは、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射し、且つ自車レーダ103の自車周波数帯域と重複する他車周波数帯域で電磁波を放射する他車レーダ113である。
【0077】
したがって、自車処理部104は、指示処理部として処理を開始すると、まず、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダを、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113(他車レーダ113a、及び113b)の中から、レーダ情報Shに基づいて特定する。図3から明らかなように、自車レーダ領域T1と重複する他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)に電磁波を放射する他車レーダは、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aである。したがって、本実施形態では、自車処理部104は、指示処理部として処理を開始すると、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aを特定する。
【0078】
次に、自車処理部104は、レーダ情報Shによって示される現在使用中の自車周波数帯域と、現在使用中の他車周波数帯域とを比較して、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aの中から、自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを特定する。
【0079】
このとき、自車処理部104は、まず、レーダ情報Shに基づいて、自車レーダ103の現在使用中の自車周波数帯域を認識する。現在使用中の自車周波数帯域を認識すると、自車処理部104は、認識した自車周波数帯域と、レーダ情報Shによって示される現在使用中の全ての他車周波数帯域とをそれぞれ比較して、認識した自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを特定する。
【0080】
図4に示すレーダ情報Shから明らかなように、他車両C2の他車レーダ113、及び他車両C3の他車レーダ113aの内、自車レーダ103が現在使用中の自車周波数帯域F1と重複する他車周波数帯域を現在使用している他車レーダは、他車両C2に搭載される他車レーダ113と他車両C3に搭載されている他車レーダ113aとの両方である。したがって、自車処理部104は、自車レーダ103と干渉する可能性のある他車レーダとして、他車両C2に搭載されている他車レーダ113と他車両C3に搭載されている他車レーダ113aとを特定する。
【0081】
自車レーダ103と干渉する可能性のある他車レーダを特定すると自車処理部104は、自車レーダ103の自車周波数帯域と特定した他車レーダの他車周波数帯域とが重複しないように、自車レーダ103、及び特定した他車レーダの少なくともいずれか一方に周波数帯域を変更させて、互いの電磁波が干渉しない状態となるように指示を与える。
【0082】
上述したように、自車レーダ103と他車レーダとが実際に干渉するのは、一方の放射する電磁波が他方のアンテナに到達し、且つ互いの周波数帯域(自車周波数帯域、及び他車周波数帯域)が重複するときである。そこで、本実施形態では、自車レーダ領域(自車レーダ領域T1)と他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)とが重複するとき、すなわち、一方の放射する電磁波が他方のアンテナに到達する前に、自車レーダ103の自車周波数帯域と、他車レーダの他車周波数帯域とが重複しないように、自車処理部104が自車周波数帯域と他車周波数帯域との少なくともいずれか一方を変更する指示を与える。これにより、自車レーダ103と干渉する可能性のある他車レーダ113とが実際に干渉する前に、互いの周波数帯域を重複しないように変更する対策を講じることができ、正確な対象物の測定を続けることができる。
【0083】
自車処理部104が、自車レーダ103の自車周波数帯域と他車レーダ113の他車周波数とが重複しないように変更する指示を与えるときは、まず、レーダ情報Shに基づいて、自車レーダ103と干渉する可能性のある他車レーダの中から、他車周波数帯域を変更することが不可能な他車レーダを特定する。本実施形態では、自車処理部104は、他車両C2の他車レーダ113と他車両C3の他車レーダ113aとの中から、レーダ情報Shによって示されるそれぞれの他車レーダの他車周波数変更可否情報に基づいて、他車周波数を変更することが不可能なレーダを特定する。図4に示すレーダ情報Shから明らかなように、他車両C2の他車レーダ113は、他車周波数変更可否情報が「否」となっており、他車両C3の他車レーダ113aは、他車周波数変更可否情報が「可」となっている。
【0084】
このため、自車処理部104は、他車周波数帯域を変更することが不可能な他車レーダとして、他車両C2に搭載された他車レーダ113を特定する。他車周波数帯域を変更することが不可能な他車レーダを特定したとき、自車処理部104は、自車レーダ103の自車周波数帯域を、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダの他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与える。これにより、自車レーダ103と干渉する可能性のあるレーダの中に、他車周波数帯域を変更することのできない他車レーダが存在したとしても、自車レーダ103が自車周波数帯域を変更するため、自車レーダ103から放射する電磁波が他車レーダのアンテナに到達して実際に干渉が生じることがなくなる。
【0085】
本実施形態では、自車処理部104が、自車レーダ領域T1と重複する他車レーダ領域T2、及び他車レーダ領域T3aにそれぞれ電磁波を放射する他車レーダ113、及び他車レーダ113aのそれぞれの現在使用している他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与える。図4に示すレーダ情報Shから明らかなように、自車レーダ103が変更可能な自車周波数帯域F1、及びF3の中で、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aの他車周波数帯域F1と重複しない自車周波数帯域は自車周波数帯域F3である。したがって、自車処理部104は、自車レーダ103に対して自車周波数帯域F1を自車周波数帯域F3へ変更する指示を与える。
【0086】
一方、自車処理部104が、他車周波数帯域を変更することが不可能な他車レーダを特定できないとき、すなわち、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダが全て他車周波数帯域を変更することが可能なときには、自車処理部104は、全ての他車レーダに対して自車周波数帯域と重複しない他車周波数帯域に変更する指示を指示情報Sj1として生成する。
【0087】
このとき、自車処理部104は、指示情報Sj1に現在使用中の自車周波数帯域を示す情報を含ませて、指示情報Sj1を生成する。そして、自車処理部104によって生成された指示情報Sj1を、上述したように自車通信部102、及び他車通信部112を介して取得したそれぞれの他車処理部114は、取得した指示情報Sj1に含まれる自車周波数帯域と重複しない他車周波数帯域をそれぞれ図示しない記憶部に記憶しているレーダ情報Shに基づいて判断して、判断した他車周波数帯域に変更する指示をそれぞれの他車レーダ113に与える。これにより、全ての他車レーダ113の他車周波数帯域が自車周波数帯域と重複しないように変更されるため、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0088】
自車処理部104は、自車レーダ103の自車周波数帯域と他車レーダの他車周波数帯域とが重複しないように変更する指示を与えると、指示処理部としての処理をしていない他車処理部114に対して待機を中止し、処理を再開する指示を示す指示情報Sj1を生成する。本実施形態では、自車処理部104は、自車レーダ103の自車周波数帯域と他車レーダの他車周波数帯域とが重複しないように変更する指示を、自車レーダ103、又は他車レーダ113に対して与えると、他車両C2、及び他車両C3の他車処理部114に対して処理を再開する指示を示す指示情報Sj1を生成する。処理を再開する指示を示す指示情報Sj1を生成すると、自車処理部104は、指示処理部としての処理を完了する。
【0089】
処理を再開する指示情報Sj1が生成されると、自車通信部102は、生成された指示情報Sj1を取得して、他車通信部112へ無線送信する。自車通信部102から無線送信された指示情報Sj1は、他車両C2、及び他車両C3の他車通信部112を介して、それぞれの他車両の他車処理部114によって取得される。それぞれの他車両の他車処理部114は、処理を再開する指示を示す指示情報Sj1を取得すると処理を再開する。
【0090】
自車処理部104が指示処理部としての処理を完了し、他車処理部114がそれぞれ処理を再開した後、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114は、上述で説明した指示処理部を定めるまでの処理を繰り返す。
【0091】
そして、指示処理部が決定した後は、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114の中から指示処理部として定まった処理部が、上述した指示処理部の処理を開始し、他の処理部は待機をする。
【0092】
例えば、他車両C2の他車処理部114が指示処理部として処理を進める場合は、当該他車処理部114が上述の説明における自車処理部104と同様の処理をし、自車両C1の自車処理部104、及び他車両C3の他車処理部114が、それぞれ上述の説明における他車両C2の他車処理部114と同様の処理をする。また、例えば、他車両C2の他車処理部114が指示処理部として処理をするときは、他車処理部114が取得、又は生成する他車レーダ諸元情報Rg2、他車レーダ情報Rj2、他車位置情報Ji2、及び指示情報Sj2のそれぞれが、自車処理部104が指示処理部として処理をするときについて説明した上述の説明における自車レーダ諸元情報Rg1、自車レーダ情報Rj1、自車位置情報Ji1、及び指示情報Sj1のそれぞれに相当する。これは、他車両C3の他車処理部114が指示処理部として処理をするときも同様である。以上が、本実施形態に係る自車処理部104と、他車処理部114との処理の詳細な説明である。
【0093】
次に、上述した自車処理部104(他車処理部114)の処理を、図5に示すフローチャートを参照しながら説明する。
【0094】
ステップS101において、自車処理部104は、自車位置情報Ji1を自車位置測定部101から取得し、自車レーダ諸元情報Rg1を自車レーダ103から取得する。自車処理部104は、ステップS101の処理を完了すると、ステップS102へ処理を進める。
【0095】
ステップS102において、自車処理部104は、ステップS101において取得した自車レーダ諸元情報Rg1によって示される自車レーダ領域を、上述したように地図上における絶対的な座標で示される領域へ変換する演算をする。自車処理部104は、ステップS102の処理を完了すると、ステップS103へ処理を進める。
【0096】
ステップS103において、自車処理部104は、ステップS101において取得した自車レーダ諸元情報Rg1によって示される複数の自車周波数帯域、自車周波数帯域変更可否情報、同じくステップS101において取得した自車位置情報Ji1、及びステップS102において演算した自車レーダ領域をそれぞれ示す上述した自車レーダ情報Rj1を生成する。自車処理部104は、自車レーダ情報Rj1を生成すると、生成した自車レーダ情報Rj1を図示しない記憶部に記憶する。尚、ステップS103において、自車処理部104によって生成された自車レーダ情報Rj1は、上述したように自車通信部102を介して無線送信される。自車処理部104は、ステップS103の処理を完了すると、ステップS104へ処理を進める。
【0097】
ステップS104において、自車処理部104は、取得範囲内に存在する他車両の他車通信部112から無線送信される他車レーダ情報Rj2を自車通信部102を介して取得する。自車処理部104は、ステップS104の処理を完了すると、ステップS105へ処理を進める。
【0098】
ステップS105において、自車処理部104は、ステップS103において記憶した自車レーダ情報Rj1と、ステップS104において取得した他車レーダ情報Rj2とを纏めてレーダ情報Shとして、図示しない記憶部に記憶する。自車処理部104は、ステップS105の処理を完了すると、ステップS106へ処理を進める。
【0099】
ステップS106において、自車処理部104は、レーダ情報Shに含まれる識別子に基づいて、自車処理部104、及びステップS104において取得した他車レーダ情報Rj2を送信した他車両の他車処理部114の中から、上述した方法で指示処理部を定める。自車処理部104は、ステップS106の処理を完了すると、ステップS107へ処理を進める。
【0100】
ステップS107において、自車処理部104は、ステップS106の処理をすることによって当該自車処理部104が指示処理部となったか否かを判断する。自車処理部104は、ステップS106において、指示処理部となったと判断すると、ステップS110へ処理を進める。一方、自車処理部104は、ステップS106において、指示処理部ではないと判断すると、ステップS108へ処理を進める。
【0101】
ステップS108〜ステップS109、及びステップS108〜ステップS109〜ステップS116の処理は、自車処理部104(他車処理部114)が指示処理部ではないときに進められる処理である。ステップS108において、自車処理部104は、他車両から無線送信される指示情報Sj2を取得したか否かを判断する。自車処理部104は、ステップS108において、指示情報Sj2を取得したと判断すると、ステップS109へ処理を進める。一方、自車処理部104は、ステップS108において、指示情報Sj2を取得していないと判断すると、ステップS108の処理を繰り返す。自車処理部104が、ステップS108において、指示情報Sj2を取得するまでステップS108の処理を繰り返すことにより、指示情報Sj2を取得するまで待機をすることとなる。
【0102】
尚、ステップS108において、自車処理部104が取得したか否かを判断する指示情報Sj2とは、自車処理部104が、指示処理部としての処理をしていないときに、指示処理部としての処理をしている他車両の他車処理部114から取得する指示情報である。つまり、指示情報Sj2とは、指示処理部として処理をしている処理部によって生成される指示情報であり、自車処理部104が指示処理部として処理をしている場合を説明した上述の説明における指示情報Sj1に相当する。
【0103】
ステップS109において、自車処理部104は、ステップS108において取得したと判断した指示情報Sj2が処理の再開を指示する情報であるか否かを判断する。自車処理部104は、ステップS109において、取得した指示情報Sj2が処理の再開を指示する情報であるとき、ステップS101へ処理を戻す。一方、自車処理部104は、ステップS109において、取得した指示情報Sj2が処理の再開を指示する情報でないときは、当該情報が自車レーダ103の自車周波数帯域を変更する指示を含む情報であると判断して、ステップS116へ処理を進める。
【0104】
ステップS110において、自車処理部104は、上述した指示処理部としての処理を開始して、ステップS105において記憶したレーダ情報Shによって示される、地図上における絶対的な領域へ変換した後の自車レーダ領域と、全ての他車レーダ113の他車レーダ領域とに基づいて、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定する処理をする。自車処理部104は、ステップS110の処理を完了すると、ステップS111へ処理を進める。
【0105】
ステップS111において、自車処理部104は、ステップS110で自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS111において、他車レーダ113を特定できたと判断したとき、ステップS112へ処理を進める。一方、自車処理部104は、ステップS111において、他車レーダ113を特定できないと判断したとき、ステップS101へ処理を戻す。
【0106】
ステップS112において、自車処理部104は、ステップS110において特定した他車レーダ113の中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている自車周波数帯域と、他車レーダ113によって現在使用されている他車周波数帯域とを比較して、自車周波数帯域と重複する他車周波数帯域の他車レーダ113を特定する処理をする。自車処理部104は、ステップS112の処理を完了すると、ステップS113へ処理を進める。
【0107】
ステップS113において、自車処理部104は、ステップS112で自車周波数帯域と重複する他車周波数帯域の他車レーダ113を特定できたか否か、すなわち、自車レーダ103と干渉する可能性のある他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS113において、他車レーダ113を特定できたと判断したとき、ステップS114へ処理を進める。一方、自車処理部104は、ステップS113で他車レーダ113を特定できないと判断したとき、自車レーダ103と干渉する可能性のあるレーダは存在しないと判断して、ステップS101へ処理を戻す。
【0108】
ステップS114において、自車処理部104は、レーダ情報Shによって示される他車周波数帯域変更可否情報に基づき、ステップS112で特定した他車レーダ113の中から他車周波数帯域を変更することが不可能な他車レーダ113を特定する処理をする。自車処理部104は、ステップS114の処理を完了すると、ステップS115へ処理を進める。
【0109】
ステップS115において、自車処理部104は、ステップS114で他車周波数帯域を変更することが不可能な他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS115において、他車レーダ113を特定できたと判断したとき、ステップS116へ処理を進める。一方、自車処理部104は、ステップS115において、他車レーダ113を特定できないと判断したとき、ステップS117へ処理を進める。
【0110】
ステップS116において、自車処理部104は、レーダ情報Shによって示される全ての他車レーダ113の現在使用中の他車周波数帯域と重複しない自車周波数帯域を選択し、選択した自車周波数帯域へ変更する指示を自車レーダ103に対して与える。さらに、ステップS116において、自車処理部104は、ステップS104において取得した他車レーダ情報Rj2を生成した他車処理部114、すなわち、取得範囲に存在する他車両の他車処理部114に対して処理を再開する指示を示す指示情報Sj1を生成する。自車処理部104は、ステップS116の処理を完了すると、ステップS101へ処理を戻す。
【0111】
ステップS117において、自車処理部104は、ステップS112で特定した他車レーダ113に対して、レーダ情報Shに基づき自車レーダ103の現在使用中の自車周波数帯域を示す情報を含み、当該自車周波数帯域と重複しない他車周波数帯域に変更させる指示を与える指示情報Sj1を生成する。
【0112】
以上が、本実施形態に係る自車処理部104の処理を示すフローチャートの説明である。尚、上述の説明では、指示処理部として処理をする自車処理部104が、現在使用中の自車周波数帯域に重複する他車周波数帯域で電磁波を放射する他車レーダを特定したとき、特定した他車レーダの中から他車周波数帯域を変更することが不可能な他車レーダを特定するものとした。しかしながら、自車処理部104は、現在使用中の自車周波数帯域に重複する他車周波数帯域で電磁波を放射する他車レーダを特定したとき、特定した他車レーダの中から他車周波数帯域を変更することが不可能な他車レーダをさらに特定することなく、直ちに、特定した全ての他車レーダの他車周波数帯域をレーダ情報Shに基づいて認識し、認識した他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与えてもよい。これにより、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダのアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0113】
また、自車処理部104は、自車レーダ103との干渉を回避できるのであれば、他車周波数帯域を変更することが可能な他車レーダの中で他車レーダ領域が最も小さい他車レーダ113に対して他車周波数帯域を変更させる指示を与えてもよい。
【0114】
上述の従来技術では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって生じる干渉を検出しない限り、干渉を回避するための対策を講じることができなかった。しかしながら、本実施形態では、上述したように自車レーダ領域(自車レーダ領域T1)と他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)とが重複するとき、すなわち、一方の放射する電磁波が他方のアンテナに到達する前に、互いの周波数帯域を重複しないように変更する対策を講じるため、実際に干渉を検出してから対策を講じることを完了するまでの期間、すなわち、対象物を測定できない期間をなくすことができる。
【0115】
また、上述の従来技術に限らず、既に実用化されているレーダの中には、干渉が生じると、受信した反射波のS/N比が低下して、測定範囲内に対象物が存在するのにも拘わらず検出することができず、測定範囲内に存在する対象物を見落としてしまうレーダもある。しかしながら、本実施形態では、自車レーダ103と干渉する可能性のある他車レーダ113とが実際に干渉する前に、互いの周波数帯域を重複しないように変更する対策を講じることができ、干渉が生じることによって測定範囲内に存在する対象物を見落としてしまうことを防げる。
【0116】
(第1の変形例)
上述の第1の実施形態では、指示処理部として処理をする自車処理部104が、干渉する可能性のある他車レーダ113を特定するときに、まず、自車レーダ103の自車レーダ領域T1に重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定するものとした。しかしながら、本発明に係る干渉回避システムは、予め定められた期間(以下、推定期間と称する)が経過したときの自車レーダ領域、及び他車レーダ領域をそれぞれ推定して、推定した自車レーダ領域(以下、推定自車レーダ領域と称する)に重複する、推定した他車レーダ領域(以下、推定他車レーダ領域と称する)に電磁波を放射する他車レーダを特定してもよい。
【0117】
図6は、一例として、図2に示す時点から前述の推定期間だけ経過したときの推定自車レーダ領域ET1、推定他車レーダ領域ET2、推定他車レーダ領域ET3a、及び推定他車レーダ領域ET3bをそれぞれ図2に重畳して示す図である。また、図6に示す自車両EC1、他車両EC2、及び他車両EC3は、それぞれ推定期間だけ経過したときの、自車両C1、他車両C2、及び他車両C3の位置を示す。
【0118】
図6に示すように、指示処理部として処理をする自車処理部104は、推定自車レーダ領域ET1、推定他車レーダ領域ET2、推定他車レーダ領域ET3a、及び推定他車レーダ領域ET3bを推定し、推定自車レーダ領域ET1に重畳する推定他車レーダ領域に電磁波を放射する他車レーダを特定してもよい。そして、推定自車レーダ領域ET1に重畳する推定他車レーダ領域に電磁波を放射する他車レーダを特定した後は、第1の実施形態と同様に、自車処理部104は、自車レーダ103の現在使用中の自車周波数帯域に重畳する他車周波数帯域を現在使用している他車レーダを、レーダ情報Shに基づいて特定してもよい。
【0119】
これにより、自車レーダ干渉回避装置10は、より早く、自車両C1以外に存在する他車両の他車レーダの中から、自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを判断する処理を開始することができる。
【0120】
尚、指示処理部として処理をする自車処理部104が、推定自車レーダ領域、及び推定他車レーダ領域を判断する方法としては、前述の推定期間だけ過去に取得したレーダ情報Shによって示される自車位置情報Ji1、及び他車位置情報Ji2と、現在の自車位置情報Ji1、及び現在の他車位置情報Ji2とのそれぞれの差分に基づき、現在よりも推定期間だけ経過したときの自車位置、及び他車位置を推定する方法が一例として挙げられる。
【0121】
推定期間だけ経過したときの自車位置を推定すると、自車処理部104は、自車位置情報Ji1によって示される位置と自車レーダ領域の基準(アンテナの搭載位置)との前述の相対的な位置関係に基づき、自車レーダ諸元情報Rg1によって示される自車レーダ領域を地図上の絶対的な座標で示される推定期間だけ経過したときの領域を演算することにより、推定自車レーダ領域を推定することができる。
【0122】
また、推定期間だけ経過したときの他車位置を推定すると、自車処理部104は、現在の他車位置情報Ji2によって示される他車位置と、推定した他車位置との差分を、現在の他車レーダ領域の地図上の絶対的な座標にそれぞれ加算することにより、推定他車レーダ領域を推定することができる。
【0123】
(第2の変形例)
第1の実施形態では、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定したとき、特定した他車レーダ113の中から、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用中の他車レーダ113を特定する処理を、全ての他車レーダ113について同時にするものとした。しかしながら、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダを特定したとき、レーダ情報Shによってそれぞれ示される自車位置情報Ji1と他車位置情報Ji2とに基づき、特定した他車レーダ113の内、自車両C1に近い他車両の他車レーダ113から順番に、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用しているか否かを判断して、特定してもよい。
【0124】
このとき、指示処理部として処理をしている自車処理部104は、さらに、自車レーダ103が現在使用中の自車周波数帯域と重複している他車周波数帯域を使用していると特定した他車レーダ113から順番に、自車レーダ103の自車周波数帯域と、特定した他車レーダ113の他車周波数帯域とが重複しないように、自車レーダ103、及び当該他車レーダ113の少なくともいずれか一方に対して周波数帯域を変更させる指示を与えてもよい。さらに、このとき、自車処理部104は、レーダ情報Shに示される他車レーダ113の他車周波数帯域変更可否情報に基づいて、第1の実施形態と同様に自車レーダ103、及び他車レーダのいずれに周波数帯域を変更させる指示を与えるかの判断をしてもよい。
【0125】
指示処理部として処理をする自車処理部104が、自車レーダ103に近い位置に存在する他車両の他車レーダから順番に干渉するか否かの判断をし、互いのレーダの周波数帯域を重複しない周波数帯域に変更することにより、自車両と衝突する危険性がより高い位置に存在する他車両の他車レーダを優先して干渉を回避して、正確な測定をすることができる。
【0126】
(第2の実施形態)
本発明において、自車レーダ103、及び他車レーダ113として用いることのできるレーダは、放射する電磁波に、予め定められた系列の符号信号を重畳するレーダであってもよい。予め定められた系列の符号信号を重畳した電磁波を放射することにより、受信した反射波と放射した電磁波との相関に基づいて、受信した反射波が、自身から放射された電磁波の反射波であるか、他のレーダから放射された電磁波を受信したものであるかを判断することができる。自車レーダ103、及び他車レーダ113が電磁波に重畳する符号信号の系列としては、M系列、及びGold系列などが一例として挙げられる。このように、放射する電磁波に予め定められた系列の符号信号を重畳するレーダは、既に実用化されている。
【0127】
ただし、自車レーダ103、及び他車レーダ113が電磁波に重畳する符号信号の系列が、互いに同じであるか否かに拘わらず、重畳する符号信号のパターンが、図7に示すように互いに同じパターンであると、いずれか一方のレーダが、他方のレーダから放射された電磁波を反射波として受信したときと、自レーダから放射された電磁波の反射波を受信したときとの間で相関の差異が不明瞭になる。このため、自車レーダ103、及び他車レーダ113が、図7に示すように互いに同じパターンの符号信号を重畳すると、他方のレーダから干渉を受けてしまう。つまり、放射する電磁波に予め定められた系列の符号信号を重畳するレーダでは、第1の実施形態で述べたように互いの周波数帯域が重複するとき以外のときでも、干渉することがある。尚、図7には、一例として、互いに異なる系列であって、且つ同じパターンの符号信号を示している。
【0128】
そこで、第2の実施形態に係る干渉回避システム2は、自車レーダ103、及び他車レーダ113がそれぞれ符号信号を重畳した電磁波を放射する場合に、互いに異なるパターンの符号信号を重畳して電磁波を放射するようにしてもよい。以下、第2の実施形態に係る干渉回避システム2の処理について説明する。尚、第2の実施形態に係る干渉回避システム2の機能構成は、第1の実施形態に係る干渉回避システム1と同じであるため説明を省略する。
【0129】
第1の実施形態では、指示処理部として処理をしている自車処理部104が、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113の中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている自車周波数帯域と、他車レーダ113によって現在使用されている他車周波数帯域とを比較して、自車周波数帯域と重複する他車周波数帯域の他車レーダ113を、自車レーダ103と干渉する可能性のあるレーダとして特定するものとした。
【0130】
これに対して、第2の実施形態では、指示処理部として処理をする自車処理部104が、第1の実施形態と同様に自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダを特定した後、特定した他車レーダの中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている符号信号のパターン(以下、自車符号パターンと称する)と、他車レーダ113によって現在使用されている符号信号のパターン(以下、他車符号パターンと称する)とを比較して、自車符号パターンと略一致する他車符号パターンの他車レーダ113を、自車レーダ103と干渉する可能性のあるレーダとして特定する。
【0131】
そして、自車レーダ103と干渉する可能性のあるレーダとして、自車レーダ103によって現在使用されている自車符号パターンと略一致する他車符号パターンを現在使用している他車レーダ113を特定すると、自車処理部104は、特定した他車レーダ113の他車符号パターンと自車レーダ103の自車符号パターンとが略一致しないように、自車レーダ103、及び他車レーダ113の少なくともいずれか一方に符号パターンを変更させる指示を与える。これにより、自車レーダ103、及び他車レーダ113は、放射した電磁波と受信した反射波との相関に基づいて、受信した反射波が、他のレーダから放射された電磁波か、自身が放射した電磁波が対象物で反射した反射波であるかを判断することができるため、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0132】
第2の実施形態において、指示処理部として処理をする自車処理部104が干渉する可能性のある他車レーダを特定するためには、自車レーダ103が記憶する自車レーダ諸元情報Rg1に自車レーダ103が現在使用中の自車符号パターン、自車符号パターン変更可否情報、及び変更可能な複数の自車符号パターンを示す情報を含ませておく必要がある。これにより、自車レーダ103から自車レーダ諸元情報Rg1を取得した自車処理部104は、自車レーダ103が現在使用中の自車符号パターン、自車符号パターン変更可否情報、及び変更可能な複数の自車符号パターンを示す情報を含む自車レーダ情報Rj1を第1の実施形態と同様に生成することができる。
【0133】
自車レーダ103と同様に、他車レーダ113は、当該他車レーダ113が記憶する他車レーダ諸元情報Rg1に、現在使用中の他車符号パターン、他車符号パターン変更可否情報、及び変更可能な他車符号パターンを示す情報を含ませておく必要がある。これにより、他車レーダ113から他車レーダ諸元情報Rg1を取得した他車処理部114は、他車レーダ113が現在使用中の他車符号パターン、他車符号パターン変更可否情報、及び変更可能な他車符号パターンを示す情報を含む他車レーダ情報Rj2を第1の実施形態と同様に生成することができる。
【0134】
そして、自車処理部104は、指示処理部として処理をするときに、第1の実施形態と同様に自車レーダ情報Rj1と他車レーダ情報Rj2とを取得してレーダ情報Shとして纏めて記憶する。図8は、第2の実施形態に係る自車処理部104、及び他車処理部114がそれぞれ記憶するレーダ情報Shの一例を示す図である。レーダ情報Shを記憶すると、自車処理部104は、自車レーダ103の自車符号パターン、及び他車レーダ113の他車符号パターンが略一致するか否かを、第1の実施形態と同様にレーダ情報Shに基づいて判断し、略一致するときには、互いのレーダが干渉する可能性があると判断して、互いのレーダが放射する電磁波を干渉しない状態にする指示を、自車レーダ103、及び他車レーダ113の少なくともいずれか一方に与える対策を講じることができる。第2の実施形態において、互いのレーダが放射する電磁波が干渉しない状態とは、互いのレーダが放射する電磁波に重畳する符号信号のパターンが互いに略一致しない状態である。
【0135】
自車処理部104は、自車レーダ103の自車符号パターンと他車レーダ113の他車符号パターンとが互いに略一致しないように変更させるとき、まず、レーダ情報Shに基づいて、自車レーダ103と干渉する可能性のある他車レーダ113の中から、他車符号パターンを変更することが不可能な他車レーダ113を特定する。そして、自車処理部104は、他車符号パターンを変更することが不可能な他車レーダ113を特定したとき、自車レーダ103の自車符号パターンを、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113の他車符号パターンと重複しない自車符号パターンに変更する指示を自車レーダ103に与える。
【0136】
一方、自車処理部104が、他車符号パターンを変更することが不可能な他車レーダ113を特定できないとき、すなわち、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113が全て他車符号パターンを変更することが可能なときには、自車処理部104は、全ての他車レーダ113に対して自車符号パターンと重複しない符号パターンに変更する指示を指示情報Sj1として生成してもよい。
【0137】
このとき、自車処理部104は、指示情報Sj1に現在使用中の自車符号パターンを示す情報を含ませて指示情報Sj1を生成する。そして、自車処理部104によって生成された指示情報Sj1を、上述したように自車通信部102、及び他車通信部112を介して取得したそれぞれの他車処理部114は、取得した指示情報Sj1に含まれる自車符号パターンと重複しない他車符号パターンをそれぞれ図示しない記憶部に記憶しているレーダ情報Shに基づいて判断して、判断した他車符号パターンに変更する指示をそれぞれの他車レーダ113に与える。これにより、全ての他車レーダ113の他車符号パターンが自車符号パターンと略一致しないように変更されるため、第1の実施形態と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0138】
また、自車処理部104は、自車レーダ領域に重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定したとき、特定した他車レーダ113の中から他車符号パターンを変更することが不可能な他車レーダ113をさらに特定することなく、直ちに、特定した全ての他車レーダ113の他車符号パターンをレーダ情報Shに基づいて認識し、認識した他車符号パターンと重複しない自車符号パターンに変更する指示を自車レーダ103に与えてもよい。これにより、第1の実施形態と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0139】
以上が、第2の実施形態に係る干渉回避システム2の説明である。尚、本発明に係る自車レーダ103、及び他車レーダ113がそれぞれ周波数帯域を変更するときは、例えば、76.6GHzであった搬送波周波数を、76.2GHzに変更するなどして周波数帯域を変更してもよい。図9に自車レーダ103、及び他車レーダ113がそれぞれ変更可能な搬送波周波数の一例を示す。図9において、同じ搬送波周波数の内、ISMと付している搬送波周波数は、国際電気通信連合(ITU)によって決定された周波数を示す。また、一般的な車両に搭載されるレーダは、製造メーカーによって採用する搬送波周波数に傾向があるため、この傾向を考慮して、レーダ情報Shによって示される周波数帯域の中から変更後の周波数帯域を選択して、自車レーダ103、又は他車レーダ113に対して指示をしてもよい。
【0140】
また、上述した自車通信部102、及び他車通信部112は、DSRC(Dedicated Short Range Communication)プロトコル、及び無線LAN(Local Area Network)で処理することのできるプロトコルを用いて、直接通信、及び基地局との通信をしてもよい。尚、本発明において無線通信をするために放射/受信する電磁波は、本発明における全てのレーダから放射される電磁波、或いは当該レーダによって受信される反射波とは異なるものであるし、干渉もしないものであることは、言うまでもない。
【0141】
また、他車レーダ干渉回避装置20は、図1に示すように他車位置測定部111、他車通信部112、他車レーダ113、及び他車処理部114を備える装置であってもよいし、既に他車両に取り付けられている他車位置測定部111(ナビゲーションシステム)、他車通信部112(DSRC通信部、又は無線LAN通信部)、及び他車レーダ113(レーダ)に相当する構成に対して、本発明に係る他車処理部114と同じ処理が可能な処理装置を付加した装置であってもよい。このとき、既に他車両に取り付けられているレーダは、上述した他車レーダ諸元情報Rg2を記憶する記憶部を備えていない場合があるため、当該処理装置が当該レーダの他車レーダ諸元情報Rg2を予め記憶し、既に取り付けられているナビゲーションシステムによって生成される他車位置情報Ji2と、記憶している他車レーダ諸元情報Rg2とに基づいて、上述した他車処理部114と同じ処理をすることで、本発明に係る干渉回避システム1、或いは干渉回避システム2を構成することができる。
【0142】
これにより、ナビゲーションシステム、通信部、及びレーダなどを予め備えている一般的な他車両に、前述の処理装置を取り付けるだけで、他車レーダ干渉回避装置20を構成することができる。
【0143】
また、本発明における自車レーダ領域、及び他車レーダ領域は、自車レーダ103、及び他車レーダ113から放射される電磁波が到達する領域を少なくとも含む領域であれば、当該電磁波が到達する領域と同じであってもよいし、自車両、或いは他車両の走行している車線の対向車線を含む領域であってもよい。
【0144】
また、上述の第1の実施形態と第2の実施形態とを組み合わせたレーダ干渉回避システムも実現可能であることは言うまでもない。すなわち、自車周波数帯域、及び自車符号パターンの内、少なくともいずれか一方を変更可能である自車レーダ103を用いてもよい。そして、指示処理部として自車処理部104が処理をする場合を一例として説明すると、他車周波数帯域、及び他車符号パターンの内、変更可能であるものが互いに異なる他車レーダ113を少なくとも含む複数の他車レーダ113が、自車レーダ領域に重複する領域に電磁波を放射するときに、自車レーダ103の自車周波数帯域、自車符号パターン、他車周波数帯域、及び他車符号パターンの内、変更可能なものを自車レーダ103、及び複数の他車レーダ113に対して変更させる指示をして干渉を回避してもよい。
【0145】
また、上述の説明では自車レーダ干渉回避装置10は、自車両の前方、後方、及び側方などの複数の方向に存在する対象物をそれぞれ測定する複数の自車レーダ103を搭載してもよいこととした。具体的に説明すると、自車レーダ干渉回避装置10は、図10に示すように1以上の自車レーダ103を必要とされる測定範囲や測定方向に応じて備えていてもよい。さらに、自車レーダ干渉回避装置10が複数の自車レーダ103を備えるときには、互いの自車レーダ103の自車周波数帯域が異なっていてもよい。他車レーダ干渉回避装置20の他車レーダ113についても同様である。
【0146】
また、自車レーダ干渉回避装置10が、上述したように対象物の存在する方向の角度を測定できる自車レーダ103を備えるとき、当該自車レーダ103は図11に示すようにレーダーの中心軸と、相対角の測定範囲の中心軸、すなわち、上下角度或いは水平角度の測定範囲の中心軸とは、必ずしも一致しなくてもよい。これは、他車レーダ干渉回避装置20の他車レーダ113についても同様である。
【0147】
また、上述の自車処理部104、及び他車処理部114はそれぞれ、記憶装置(ROM、RAM、ハードディスク等)に格納された上述した処理手順を実施可能な所定のプログラムデータが、LSI、CPU或いはマイクロコンピュータなどによって解釈実行されることで実現されてもよい。CPUとは、自動車などの移動体に搭載されるECU(Electric Control Unit)を構成するCPUなどであってもよい。また、この場合、プログラムデータは、記憶媒体を介して記憶装置内に導入されてもよいし、記憶媒体上から直接実行されてもよい。尚、記憶媒体とは、ROMやRAMやフラッシュメモリなどの半導体メモリ、フレキシブルディスクやハードディスクなどの磁気ディスクメモリ、CD−ROMやDVDやBDなどの光ディスクメモリ、及びメモリカードなどであってもよい。また、上述の自車レーダ干渉回避装置10、及び他車レーダ干渉回避装置20をそれぞれ構成する1つ、又は複数の機能ブロックを、1つ、又は複数の電子回路、LSI、CPU、及びマイクロコンピュータなどを組み合わせて実現してもよい。
【0148】
以上、本発明を詳細に説明してきたが、上述の説明はあらゆる点において本発明の一例にすぎず、その範囲を限定しようとするものではない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。
【産業上の利用可能性】
【0149】
本発明によれば、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信せずとも、干渉する可能性があるか否かを判断でき、干渉する可能性があると判断したときに対策を講じることのできるレーダ干渉回避装置、及び当該装置で実行されるレーダ干渉回避方法を提供でき、例えば、車両などの移動体に搭載されるレーダの干渉を回避するレーダ干渉回避装置などに有用である。
【図面の簡単な説明】
【0150】
【図1】本発明に係る干渉回避システム1の機能構成を示す機能ブロック図
【図2】本発明における自車レーダ領域(他車レーダ領域)を説明する図
【図3】本発明に係る干渉回避システム1の処理を説明するための図
【図4】第1の実施形態に係るレーダ情報の一例を示す図
【図5】本発明に係る自車処理部(他車処理部)の処理を示すフローチャート
【図6】第1の実施形態の第1の変形例を説明するための図
【図7】本発明に係る自車レーダ(他車レーダ)が電磁波に重畳する符号信号の一例を示す図
【図8】第2の実施形態に係るレーダ情報の一例を示す図
【図9】本発明に係る自車レーダ(他車レーダ)の使用可能な電磁波の搬送波周波数を示す図
【図10】自車レーダの搭載箇所の一例を示す図
【図11】自車レーダの中心軸と測定方向との一例を示す図
【符号の説明】
【0151】
1 干渉回避システム
2 干渉回避システム
10 自車レーダ干渉回避装置
20 他車レーダ干渉回避装置
101 自車位置測定部
102 自車通信部
103 自車レーダ
104 自車処理部
111 他車位置測定部
112 他車通信部
113 他車レーダ
114 他車処理部
【技術分野】
【0001】
本発明はレーダ装置に関し、より特定的には、車両などの移動体に搭載されるレーダ装置に関する。
【背景技術】
【0002】
近年、自車両などの移動体に搭載され、自車両の周囲の他車両や障害物などの対象物との相対距離、相対速度、及び他車両の存在する方向などの対象物の情報を測定するレーダ装置が実用化されている。このようなレーダ装置では、電磁波を放射してから、放射した電磁波が対象物で反射した反射波を受信するまでの時間、及び放射した電磁波と受信した反射波との位相差などに基づき対象物との相対距離、相対速度、及び他車両の存在する方向などを測定する。尚、このようなレーダ装置としては、電磁波としてレーザー光を照射するものも実用化されている。そして、これらのレーダ装置では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって干渉が生じてしまい、対象物の情報を誤測定してしまうことがある。他車両に搭載されたレーダ装置と自車両に搭載されたレーダ装置とが干渉することを防ぐための技術として、例えば、特許文献1に記載の車載用レーダ装置(以下、従来技術と称する)が一例として挙げられる。
【0003】
従来技術では、干渉していることを検知したときに、電磁波として放射する送信波の中心周波数、変調方式、周波数帯域、及び干渉波を検出するためのしきい値などを変更するなどの対策を講じることにより、干渉したときに発生する誤測定を防いでいる。
【特許文献1】特開2004−170183号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術では、以下に述べるような課題を有する。すなわち、上記従来技術では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって実際に干渉を起こさない限り、前述の対策を講じることができない。
【0005】
それ故に、本発明は、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信せずとも、干渉する可能性があるか否かを判断でき、干渉する可能性があると判断したときに対策を講じることのできるレーダ干渉回避装置、及び当該装置で実行されるレーダ干渉回避方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記課題を解決するために、以下に示すような特徴を有する。
第1の発明は、放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える。
【0007】
第2の発明は、上記第1の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、判断手段は、自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段を、レーダ情報に基づき特定する領域重複レーダ特定手段を含み、領域重複レーダ特定手段によって特定された他車両のレーダ手段と自車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する。
【0008】
第3の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段が電磁波、及び反射波をそれぞれ放射、及び受信するときの周波数帯域を他車周波数帯域として示す情報を取得し、判断手段は、自車両のレーダ手段が電磁波を放射するとき、及び反射波を受信するときのそれぞれの周波数帯域を示す自車周波数帯域を自車両のレーダ手段の情報に基づき認識する自車周波数認識手段と、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたとき、自車周波数認識手段によって認識された自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を、領域重複レーダ特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき判断する重複周波数判断手段とを含み、重複周波数判断手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があると判断し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び重複周波数特定手段によって特定された他車両のレーダ手段の少なくとも一方に対して、自車周波数帯域と他車周波数帯域とが互いに重複しないように変更する指示を与える。
【0009】
第4の発明は、上記第3の発明に従属する発明であって、通信手段は、他車両のレーダ手段が他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、他車周波数帯域を変更することが不可能な他車両のレーダ手段を、重複周波数特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定する第1の指示対象特定手段を含み、第1の指示対象特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段に対して、重複周波数特定手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する指示を与える。
【0010】
第5の発明は、上記第4の発明に従属する発明であって、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されないとき、重複周波数特定手段によって特定された他車両のレーダ手段に対して、自車周波数帯域、及び互いの他車周波数帯域とそれぞれ重複しない他車周波数帯域に変更する指示を与える。
【0011】
第6の発明は、上記第3の発明に従属する発明であって、指示手段は、判断手段によって干渉すると判断されたとき、自車両のレーダ手段に対して、重複周波数特定手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する指示を与える。
【0012】
第7の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段が、電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す情報を取得し、判断手段は、自車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを示す自車符号パターンを自車両のレーダ手段の情報に基づき認識する自車符号パターン認識手段と、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたとき、自車符号パターン認識手段によって認識された自車符号パターンと略一致する他車符号パターンを重畳した電磁波を放射する他車両のレーダ手段を、領域重複レーダ特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定するパターン特定手段とを含み、パターン特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があると判断し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及びパターン特定手段によって特定された他車両のレーダ手段の少なくともいずれか一方に対して、自車符号パターンと他車符号パターンとが互いに略一致しないよう変更する指示を与える。
【0013】
第8の発明は、上記第7の発明に従属する発明であって、通信手段は、他車両のレーダ手段が他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得し、指示手段は、判断手段によって干渉する可能性があると判断されたとき、他車符号パターンを変更することが不可能な他車両のレーダ手段を、パターン特定手段によって特定された他車両のレーダ手段の中から、レーダ情報に基づき特定する第2の指示対象特定手段を含み、第2の指示対象特定手段によって他車両のレーダ手段が特定されたとき、自車両のレーダ手段に対して、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと略一致しないように変更させる指示を与える。
【0014】
第9の発明は、上記第8の発明に従属する発明であって、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されないとき、パターン特定手段によって特定された他車両のレーダ手段に対して、自車符号パターン、及び互いの他車符号パターンとそれぞれ重複しない他車符号パターンに変更するように指示を与える。
【0015】
第10の発明は、上記第7の発明に従属する発明であって、指示手段は、判断手段によって干渉すると判断されたとき、自車両のレーダ手段に対して、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと略一致しない自車符号パターンに変更する指示を与える。
【0016】
第11の発明は、上記第2の発明に従属する発明であって、領域重複レーダ特定手段は、現在よりも予め定められた期間だけ以前の間の自車側領域に基づき、現在よりも当該予め定められた期間だけ経過したときの自車側領域を推定する自車領域推定手段と、現在よりも予め定められた期間だけ以前の間に通信手段によって取得された他車側領域に基づき、現在よりも当該予め定められた期間だけ経過したときの他車側領域を他車両のレーダ手段に対応付けて推定する他車領域推定手段とを含み、自車領域推定手段によって推定された自車側領域と重複する他車領域推定手段によって推定された他車側領域に対応付けられた他車両のレーダ手段をさらに特定する。
【0017】
第12の発明は、上記第5の発明に従属する発明であって、通信手段は、他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、重複周波数判断手段は、自車両のレーダ手段の位置を示す自車レーダ位置を自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を特定するとき、自車レーダ位置認識手段によって認識された自車レーダ位置と近い他車レーダ位置に存在する他車両のレーダ手段の他車周波数帯域から順番に自車周波数帯域と比較して特定し、指示手段は、他車両のレーダ手段に対して指示を与えるとき、他車レーダ位置の内、自車レーダ位置と近い位置に存在する他車両のレーダ手段から順番に他車周波数帯域を変更する指示を与える。
【0018】
第13の発明は、上記第9の発明に従属する発明であって、通信手段は、他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、パターン特定手段は、自車両のレーダ手段の位置を示す自車レーダ位置を自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、自車符号パターンと略一致する他車符号パターンの他車両のレーダ手段を特定するとき、自車レーダ位置認識手段によって認識された自車レーダ位置と近い他車レーダ位置に存在する他車両のレーダ手段の他車符号パターンから順番に自車符号パターンと比較して特定し、指示手段は、他車両のレーダ手段に対して指示を与えるとき、他車レーダ位置の内、自車レーダ位置と近い位置に存在する他車両のレーダ手段から順番に他車符号パターンを変更する指示を与える。
【0019】
第14の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達する他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達する自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段を、レーダ情報に基づき特定する。
【0020】
第15の発明は、上記第2の発明に従属する発明であって、通信手段は、他車両のレーダ手段から放射される電磁波が到達し、且つ当該他車両が走行している車線の対向車線を含む他車側領域を他車両のレーダ手段に対応付けて示す情報を取得し、領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達し、且つ当該自車両が走行している車線の対向車線を含む自車側領域と重複する他車側領域に対応付けられた他車両のレーダ手段をレーダ情報に基づき特定する。
【0021】
第16の発明は、放射した電磁波と受信した反射波とに基づき、対象物を測定する自車両、及び他車両のレーダの情報を取得する取得ステップと、取得ステップにおいて取得された自車両のレーダの情報、及び他車両のレーダの情報を示すレーダ情報に基づき、自車両のレーダと他車両のレーダとが互いに干渉する可能性があるか否かを判断する判断ステップと、判断ステップにおいて干渉する可能性があると判断されたとき、自車両のレーダ、及び他車両のレーダの少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示ステップとを備える。
【発明の効果】
【0022】
上記第1の発明によれば、自車両のレーダ手段と他車両のレーダ手段とが干渉する可能性があるか否かを判断するために必要な他車両のレーダ手段の情報を、通信手段を用いて事前に取得することができる。そして、第1の発明によれば、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することなく、他車両のレーダ手段の情報と自車両のレーダ手段の情報とに基づいて、互いのレーダ手段が干渉する可能性があるか否かの判断をすることができる。また、第1の発明によれば、他車両のレーダ手段の情報と自車両のレーダ手段の情報とに基づき、干渉する可能性があると判断したときに、自車両のレーダ手段と他車両のレーダ手段との少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える対策を講じることができる。
【0023】
上記第2の発明によれば、判断手段に含まれる領域重複レーダ特定手段は、自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む自車側領域と、他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む他車側領域とに基づき、自車両のレーダ手段から放射される電磁波に干渉する可能性のある電磁波を放射する他車両のレーダ手段を特定する。このため、第2の発明によれば、自車両以外の他車両のレーダ手段の中から、判断手段が干渉する可能性があるか否かを判断をする対象とする必要があるレーダ手段を特定することができる。
【0024】
上記第3の発明によれば、他車両のレーダ手段の電磁波、及び反射波をそれぞれ放射、及び受信するときの他車周波数帯域を他車両のレーダ手段の情報として、通信手段を用いて取得する。そして、重複周波数特定手段は、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたときに、自車両のレーダ手段の電磁波、及び反射波をそれぞれ放射、及び受信するときの自車周波数帯域と重複する他車周波数帯域の他車両のレーダ手段を特定する。すなわち、自車両のレーダ手段と他車両のレーダ手段との一方から放射された電磁波が他方のレーダ手段に到達したときに干渉する可能性のある電磁波を放射するレーダ手段を、一方から放射された電磁波が到達する前に特定することができる。そして、指示手段は、重複周波数特定手段によって特定された他車両のレーダ手段、及び自車両のレーダ手段の少なくともいずれか一方、すなわち、互いに干渉する可能性のあるレーダ手段の少なくともいずれか一方に対して、互いの周波数帯域が重複しないように変更する指示を与えて、互いのレーダ手段が干渉しないように対策を講じることができる。
【0025】
上記第4の発明によれば、通信手段によって、他車両のレーダ手段が他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得する。そして、第1の指示対象特定手段は、重複周波数特定手段によって特定された他車両のレーダ手段、すなわち、自車両のレーダ手段と干渉する可能性のあるレーダ手段の中から他車周波数帯域を変更することが不可能なレーダ手段を特定する。そして、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されたとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車周波数帯域を変更することが不可能であるときには、自車両のレーダ手段の自車周波数帯域を他車両のレーダ手段の他車周波数と重複しない自車周波数帯域に変更する対策を講じることができる。
【0026】
上記第5の発明によれば、指示手段は、第1の指示対象特定手段によって他車両のレーダ手段が特定されないとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車周波数帯域を変更することができるときは、他車両のレーダ手段に対して、自車周波数帯域と重複しない他車周波数帯域に変更する対策を講じることができる。
【0027】
上記第6の発明によれば、指示手段は、判断手段によって干渉する可能性があると判断されたときには、直ちに自車両のレーダ手段の自車周波数帯域を、重複周波数判断手段によって特定された他車両のレーダ手段の他車周波数帯域と重複しない自車周波数帯域に変更する対策を講じることができる。
【0028】
上記第7の発明によれば、他車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す他車両のレーダ手段の情報を、通信手段を用いて取得する。そして、パターン特定手段は、領域重複レーダ特定手段によって他車両のレーダ手段が特定されたときに、自車両のレーダ手段が電磁波に重畳して放射する予め定められた符号信号の符号パターンである自車符号パターンと略一致する他車符号パターンの符号信号を重畳した電磁波を放射する他車両のレーダ手段を特定する。すなわち、自車両のレーダ手段と他車両のレーダ手段との一方から放射された電磁波が他方のレーダ手段に到達したときに干渉する可能性のある電磁波を放射するレーダ手段を、一方から放射された電磁波が到達する前に特定する。そして、指示手段は、パターン特定手段によって特定された他車両のレーダ手段、及び自車両のレーダ手段の少なくともいずれか一方、すなわち、互いに干渉する可能性のあるレーダ手段の少なくともいずれか一方に対して、互いの符号パターンが略一致しないように変更する指示を与えて、互いのレーダ手段が干渉しないように対策を講じることができる。
【0029】
上記第8の発明によれば、通信手段によって、他車両のレーダ手段が他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得する。そして、第2の指示対象特定手段は、パターン特定手段によって特定された他車両のレーダ手段、すなわち、自車両のレーダ手段と干渉する可能性のあるレーダ手段の中から他車符号パターンを変更することが不可能なレーダ手段を特定する。そして、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されたとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車符号パターンを変更することが不可能であるときには、自車両のレーダ手段の自車符号パターンを他車両のレーダ手段の他車符号パターンと略一致しない自車符号パターンに変更する対策を講じることができる。
【0030】
上記第9の発明によれば、指示手段は、第2の指示対象特定手段によって他車両のレーダ手段が特定されないとき、すなわち、自車両のレーダ手段と干渉する可能性があると判断した他車両のレーダ手段が他車符号パターンを変更することができるときは、他車両のレーダ手段に対して、自車符号パターンと重複しない他車符号パターンに変更する対策を講じることができる。
【0031】
上記第10の発明によれば、指示手段は、判断手段によって干渉する可能性があると判断されたときには、直ちに自車両のレーダ手段の自車周波数帯域を、パターン特定手段によって特定された他車両のレーダ手段の他車符号パターンと重複しない他車符号パターンに変更する対策を講じることができる。
【0032】
上記第11の発明によれば、予め定められた期間だけ経過したときの自車側領域と、他車側領域とをそれぞれ推定し、推定した自車側領域と他車側領域とに基づいて、自車両のレーダ手段から放射される電磁波に干渉する可能性のある電磁波を放射する他車両のレーダ手段を特定する。このため、第11の発明によれば、より早く、自車両以外に存在する他車両のレーダ手段の中から、判断手段が干渉する可能性があるか否かを判断する対象とする必要があるレーダ手段を特定することができる。
【0033】
上記第12の発明によれば、重複周波数判断手段は自車両のレーダ手段に近い他車両のレーダ手段の他車周波数帯域から順番に自車周波数帯域と比較して、重複する他車周波数帯域の他車両のレーダ手段を特定し、指示手段は、自車両のレーダ手段の位置と近い位置に存在する他車両のレーダ手段から順番に自車周波数帯域と重複しない他車周波数帯域に変更する指示を与える。このため、重複周波数判断手段、及び指示手段は、それぞれ自車両のレーダ手段に近い位置に存在する他車両のレーダ手段、すなわち、自車両と衝突する危険性がより高いと考えられる他車両のレーダ手段を優先して処理をすることができる。
【0034】
上記第13の発明によれば、パターン特定手段は自車両のレーダ手段に近い他車両のレーダ手段の他車符号パターンから順番に自車符号パターンと比較して、略一致する他車符号パターンの他車両のレーダ手段を特定し、指示手段は、自車両のレーダ手段の位置と近い位置に存在する他車両のレーダ手段から順番に自車符号パターンと重複しない他車符号パターンに変更する指示を与える。このため、パターン特定手段、及び指示手段は、それぞれ自車両のレーダ手段に近い位置に存在する他車両のレーダ手段、すなわち、自車両と衝突する危険性がより高いと考えられる他車両のレーダ手段を優先して処理をすることができる。
【0035】
上記第14の発明によれば、自車両のレーダから放射される電磁波が到達する領域と、他車両のレーダから放射される電磁波が到達する領域とが重複するときに、自車両のレーダと他車両のレーダとが干渉する可能性があるか否かを判断できるため、一方のレーダから放射された電磁波が他方のレーダに到達して実際に干渉が生じる前に、互いのレーダの少なくともいずれか一方に対して放射する電磁波を干渉しない状態に変更することができる。
【0036】
上記第15の発明によれば、自車両と他車両との互いの対向車線を含む自車側領域と、他車側領域とが重複するときに、自車両のレーダと他車両のレーダとが干渉する可能性があるか否かを判断できるため、対向車線を走行する車両に搭載されたレーダとの干渉を回避することができる。
【0037】
また、本発明のレーダ干渉回避方法によれば、上述した本発明に係るレーダ干渉回避装置と同様の効果を得ることができる。
【発明を実施するための最良の形態】
【0038】
(第1の実施形態)
図1は、本発明の第1の実施形態に係るレーダ干渉回避システム1の機能構成を示す機能ブロック図である。レーダ干渉回避システム1は、自車レーダ干渉回避装置10と他車レーダ干渉回避装置11とからなる。まず、自車レーダ干渉回避装置10の機能構成について説明する。自車レーダ干渉回避装置10は、自車両に搭載され、自車位置測定部101と、自車通信部102と、自車レーダ103と、自車処理部104とを備える。
【0039】
自車位置測定部101は、典型的には、一般的に知られているカーナビゲーションシステムなどのGPS(Global Positioning System)であり、衛星から送信される信号に基づいて、自車両の地図上における絶対的な位置(例えば、緯度、及び経度など)を逐次測定し、測定した位置を示す自車位置情報Ji1を生成する。
【0040】
自車通信部102は、典型的には、図示しないアンテナを介して無線通信をする電子回路であり、路上に設置されている基地局を介して無線通信をしたり、他車両と直接無線通信することにより後述する他車通信部112から無線送信される他車レーダ情報Rj2を受信して取得する。また、自車通信部102は、後述する自車レーダ情報Rj1を自車処理部104から取得する。自車通信部102は、路上に設置されている基地局を介して無線通信をしたり、直接無線通信することにより、自車レーダ情報Rj1を他車通信部112へ無線送信する。
【0041】
自車レーダ103は、典型的には、図示しないアンテナを介して電磁波を空間に放射し、放射した電磁波が対象物で反射した反射波を受信するレーダである。自車レーダ103は、電磁波を放射してから反射波を受信するまでの時間差、及び放射した電磁波と受信した反射波との位相差などに基づいて対象物との相対距離や相対速度などを逐次測定する。自車レーダ103は、測定するときに電磁波としてレーザー光を用いて対象物を測定するレーダであってもよい。さらに、自車レーダ103は、対象物が存在する方向の水平面に沿った角度や、鉛直面に沿った角度を測定できるレーダであってもよい。
【0042】
自車レーダ103は、後述する他車両に搭載された他車レーダ113から放射された電磁波を反射波として受信して干渉を受けると、前述の時間差、及び位相差などを誤って検出してしまい、対象物との相対距離や相対速度などを正確に測定できなくなる。自車レーダ103が、他車レーダ113から放射された電磁波を受信して干渉を受けるのは、他車レーダ113から放射された電磁波が自車レーダ103の図示しないアンテナに到達し、且つ自車レーダ103が反射波を受信するときの周波数帯域と、他車レーダ113が放射した電磁波の周波数帯域とが重複するときが一例として考えられる。同様に、他車レーダ113が、自車レーダ103から放射された電磁波を受信して干渉を受けるのは、自車レーダ103から放射された電磁波が他車レーダ113の図示しないアンテナに到達し、且つ他車レーダ113が反射波を受信するときの周波数帯域と、自車レーダ103が放射した電磁波の周波数帯域とが重複するときが一例として考えられる。
【0043】
したがって、自車レーダ103、及び他車レーダ113は、互いに他方から放射される電磁波の周波数帯域と重複しない周波数帯域で、電磁波の放射、及び反射波の受信をすることにより、一方の放射する電磁波が他方のアンテナに到達したとしても、干渉を受けることなく対象物との相対距離や相対速度などを正確に測定できる。そこで、自車レーダ103は、他車レーダ113から干渉を受けることなく測定をするために、後述する自車処理部104から与えられる指示に応じた周波数帯域で対象物の測定をする。尚、自車処理部104が、自車レーダ103に周波数帯域を変更させる指示を与えるときの詳細な処理の説明は後述する。
【0044】
尚、自車レーダ103が、自車処理部104から与えられる指示に応じて反射波を受信するときの周波数帯域を変更するときは、変更後の周波数帯域で反射波を受信できるように、放射する電磁波の周波数帯域も同時に変更する必要がある。つまり、自車レーダ103が反射波を受信するときの周波数帯域を変更するときは、放射する電磁波の周波数帯域も必ず変更する。自車レーダ103と同様に他車レーダ113も、反射波を受信するときの周波数帯域を変更するときは、放射する電磁波の周波数帯域も必ず変更する。以下では、自車レーダ103が反射波を受信するときの周波数帯域、及び電磁波を放射するときの周波数帯域を単に自車周波数帯域と称する。また、他車レーダ113が反射波を受信するときの周波数帯域、及び電磁波を放射するときの周波数帯域を単に他車周波数帯域と称する。
【0045】
また、自車レーダ103には、放射する電磁波が到達する領域を少なくとも含む自車レーダ領域が図示しない記憶部に予め記憶されている。自車レーダ103が図示しない記憶部に記憶する自車レーダ領域は、図2に示すように自車レーダ103が電磁波を放射するときの放射点(例えば、アンテナ、或いは発光素子など)を基準として示される領域である。図2には、一例として、放射点から放射された電磁波が到達する領域を模しており、当該領域を少なくとも含む、放射点を基準とした半径R、角度θの扇形で示される自車レーダ領域を示している。
【0046】
尚、本実施形態では、自車レーダ103の放射点と、反射波を受信する受信点とは同じ位置にあるものとする。すなわち、本実施形態に係る自車レーダ103は、電磁波の放射と、反射波の受信とを1つのアンテナでするものとする。したがって、図2に示す放射点は、受信点の位置でもあり、自車レーダ103が測定に用いるアンテナの搭載位置でもある。ただし、自車レーダ103のアンテナは、実際には、図2に示す放射点で示されるバンパーの内部に搭載されているものとする。尚、他車レーダ113も自車レーダ103と同様に、電磁波の放射と反射波の受信とを1つのアンテナでするものとする。
【0047】
また、自車レーダ103の図示しない記憶部には、自車処理部104から与えられる指示に応じて電磁波の周波数帯域を変更するときのために、複数の自車周波数帯域、及び自車レーダ103が自車周波数帯域を変更することが可能であるか否かを示す自車周波数変更可否情報などを図示しない記憶部に予め記憶している。上述した自車レーダ領域、複数の自車周波数帯域、及び自車周波数変更可否情報は、自車レーダ諸元情報Rg1として、自車レーダ103の図示しない記憶部に予め記憶されている。
【0048】
つまり、自車レーダ103の図示しない記憶部には、自車レーダ103が対象物を測定するときの電磁波の周波数帯域、電磁波の周波数帯域を変更することが可能か否かなどの自車レーダ103の諸元を示す情報が予め記憶されているものとする。さらに、自車レーダ103は、自車レーダ諸元情報Rg1によって示される自車周波数帯域の内、現在使用中の自車周波数帯域を示す情報を当該自車レーダ諸元情報Rg1に含ませ、自車周波数を変更するたびに更新する。
【0049】
尚、自車レーダ諸元情報Rg1によって示される上述した情報は一例であり、自車レーダ諸元情報Rg1はさらに他の情報を示すものであってもよい。また、自車レーダ干渉回避装置10が備える自車レーダ103の数は1台であってもよいし、2以上であってもよい。自車レーダ干渉回避装置10が2以上の自車レーダ103を備える場合としては、自車両が前方、後方、及び側方の複数の方向に存在する対象物をそれぞれ測定する自車レーダ103を搭載する場合が一例として挙げられる。
【0050】
自車処理部104は、典型的には、マイコンなどの演算回路であり、自車位置測定部101によって生成される自車位置情報Ji1、自車通信部102によって取得された他車レーダ情報Rj2、及び自車レーダ103によって記憶されている自車レーダ諸元情報Rg1をそれぞれ取得し、取得した情報に基づき、自車レーダ103と他車レーダ113とが互いに干渉しないように自車レーダ103、及び他車レーダ113の少なくともいずれか一方に対して指示を与える。
【0051】
また、自車処理部104は、それぞれ取得した自車位置情報Ji1、及び自車レーダ諸元情報Rg1に基づいて後述する自車レーダ情報Rj1を生成する。自車処理部104は、自車位置情報Ji1、及び自車レーダ諸元情報Rg1に基づいて生成した情報に自車両に固有の識別子を付与して、自車レーダ情報Rj1を生成する。自車処理部104によって生成された自車レーダ情報Rj1を、上述したように自車通信部102が取得して、他車両に無線送信することにより、他車両に搭載された他車処理部114は自車レーダ情報Rj1を取得することができる。自車処理部104の詳細な処理の説明は後述する。以上が、自車レーダ干渉回避装置10の機能構成の説明である。
【0052】
次に、他車レーダ干渉回避装置11の機能構成について説明する。他車レーダ干渉回避装置11は、他車両に搭載され、他車位置測定部111と、他車通信部112と、他車レーダ113と、他車処理部114とを備える。
【0053】
他車位置測定部111は、典型的には、一般的に知られているカーナビゲーションシステムなどのGPSであり、自車位置測定部101と同様に、他車両の地図上における絶対的な位置(例えば、緯度、及び経度)を逐次測定し、測定した位置を示す他車位置情報Ji2を生成する。
【0054】
他車通信部112は、典型的には、図示しないアンテナを介して無線通信をする電子回路である。他車通信部112は、後述する他車レーダ情報Rj2を他車処理部114から取得する。他車通信部112は、上述した自車通信部102と同様に無線通信をすることにより、取得した他車レーダ情報Rj2を自車通信部102へ無線送信する。また、他車通信部112は、上述したように自車通信部102から無線送信される自車レーダ情報Rj1を受信して取得する。
【0055】
他車レーダ113は、典型的には、図示しないアンテナを介して電磁波を空間に放射し、放射した電磁波が対象物で反射した反射波を受信するレーダである。他車レーダ113は、自車レーダ103と同様に対象物との相対距離や相対速度などを逐次測定する。他車レーダ113も自車レーダ103と同様に、測定するときに電磁波としてレーザー光を用いて対象物を測定してもよい。
【0056】
他車レーダ113は、上述した自車レーダ103と同様に、自車レーダ103から干渉を受けることなく測定をする必要があるために、後述する他車処理部114から与えられる指示に応じた周波数帯域で対象物の測定をする。尚、他車処理部114が、他車レーダ113に周波数帯域を重複しないように変更させる指示を与えるときの詳細な処理の説明は、自車処理部104の処理の説明と共に後述する。
【0057】
また、他車レーダ113には、上述した自車レーダ領域、自車周波数帯域、及び自車周波数変更可否情報と同様の情報をそれぞれ他車レーダ113について示す、他車レーダ領域、他車周波数帯域、及び他車周波数変更可否情報などが、自車レーダ103と同様に図示しない記憶部に他車レーダ諸元情報Rg2として予め記憶されている。
【0058】
他車レーダ113が変更できる他車周波数帯域の数は、必ずしも自車レーダ103と同じでなくてもよいし、他車周波数帯域を変更できなくてもよい。また、他車レーダ干渉回避装置11が備える他車レーダ113の数は1台であってもよいし、2以上であってもよい。他車レーダ干渉回避装置11が2以上の他車レーダ113を備える場合としては、他車両が前方、後方、及び側方の複数の方向に存在する対象物をそれぞれ測定する他車レーダ113を搭載する場合が一例として挙げられる。また、他車レーダ113は、対象物が存在する方向の水平面に沿った角度や、鉛直面に沿った角度を測定できるレーダであってもよい。
【0059】
他車処理部114は、典型的には、マイコンなどの演算回路であり、他車位置測定部111によって生成される他車位置情報Ji2、他車通信部112によって取得された自車レーダ情報Rj1、及び他車レーダ113によって生成された他車レーダ諸元情報Rg2をそれぞれ取得し、取得した情報に基づき、他車レーダ113と自車レーダ103とが互いに干渉しないように自車処理部104と同様の処理をする。
【0060】
また、他車処理部114は、それぞれ取得した他車位置情報Ji2、及び他車レーダ諸元情報Rg2に基づいて後述する他車レーダ情報Rj2を生成する。他車処理部114は、他車位置情報Ji2、及び他車レーダ諸元情報Rg2に基づいて生成した情報に他車レーダ113を搭載している他車両に固有の識別子を付与して、他車レーダ情報Rj2を生成する。他車処理部114によって生成された他車レーダ情報Rj2を、上述したように他車通信部112が取得して、自車両に無線送信することにより、自車両に搭載された自車処理部104は他車レーダ情報Rj2を取得することができる。以上が、他車レーダ干渉回避装置11の機能構成の説明である。
【0061】
次に、自車処理部104の詳細な処理の説明をする。図3は、ある時刻において自車両C1の対向車線を他車両C2が走行しており、自車両C1の前方に他車両C3が先行しているとき位置関係の一例を示す図である。自車両C1は、上述した自車レーダ干渉回避装置10を搭載しているものとする。また、他車両C2、及び他車両C3は、上述した他車レーダ干渉回避装置11をそれぞれ搭載しているものとする。尚、本実施形態に係る他車処理部114は、自車処理部104と同一の処理をする。
【0062】
自車両C1は、前方に存在する対象物を測定する自車レーダ103を備えており、図3に示す自車レーダ領域T1は、自車レーダ103に予め記憶されている自車レーダ領域を示している。また、他車両C2は、前方に存在する対象物を測定する他車レーダ113を備えており、図3に示す他車レーダ領域T2は、他車レーダ113に予め記憶されている他車レーダ領域を示している。また、他車両C3は、後方に存在する対象物を測定する他車レーダ113aと、前方に存在する対象物を測定する他車レーダ113bを備えており、図3に示す他車レーダ領域T3a、及び他車レーダ領域T3bは、それぞれ他車レーダ113a、及び他車レーダ113bにそれぞれ予め記憶されている他車レーダ領域を示している。尚、他車両C3に搭載される他車レーダ干渉回避装置11は、2つの他車レーダ113a、及び他車レーダ113bが1つの他車処理部114に接続されているものとする。以下では、自車両C1、他車両C2、及び他車両C3の位置関係が図3に示すものであるとして説明を続ける。
【0063】
まず、自車両C1に搭載された自車処理部104は、自車位置測定部101によって生成された自車位置情報Ji1と、自車レーダ103の図示しない記憶部に記憶されている自車レーダ諸元情報Rg1とをそれぞれ取得する。自車レーダ諸元情報Rg1を取得すると、自車処理部104は、取得した自車レーダ諸元情報Rg1によって示される自車レーダ領域と、取得した自車位置情報Ji1とに基づき、アンテナの搭載位置を基準として示される自車レーダ領域を地図上における絶対的な座標で示される自車レーダ領域T1(例えば、緯度、及び経度で示される領域)へ変換する演算をする。
【0064】
より具体的には、自車処理部104には、自車位置測定部101によって測定される自車両C1の位置と、自車レーダ領域の基準となるアンテナの搭載位置との相対的な位置関係が図示しない記憶部に予め定められている。自車処理部104は、自車位置情報Ji1を取得すると、取得した自車位置情報Ji1と、前述の相対的な位置関係とに基づき、自車レーダ103から取得した自車レーダ諸元情報Rg1に示される自車レーダ領域を地図上における絶対的な座標で示される自車レーダ領域T1に変換する演算をする。自車処理部104が、自車レーダ103に記憶されている自車レーダ領域を地図上における絶対的な座標で示される領域に変換する方法は、任意の方法であってよい。以下では、自車レーダ領域T1、他車レーダ領域T2、他車レーダ領域T3a、及び他車レーダ領域T3bは、それぞれ地図上の絶対的な座標で示される領域であるものとして説明を続ける。
【0065】
自車レーダ領域T1を演算すると、自車処理部104は、取得した自車レーダ諸元情報Rg1によって示される複数の自車周波数帯域、自車周波数帯域変更可否情報、取得した自車位置情報Ji1、及び演算した自車レーダ領域T1をそれぞれ示す自車レーダ情報Rj1を生成する。自車レーダ情報Rj1を生成するとき、自車処理部104は、上述したように当該自車レーダ情報Rj1によって示される情報に自車両に固有の識別子を含ませて自車レーダ情報Rj1を生成する。また、自車処理部104によって生成される自車レーダ情報Rj1には、上述したように自車レーダ103によって自車レーダ諸元情報Rg1に含まされた現在使用中の自車周波数帯域を示す情報も含まれる。自車処理部104によって生成された自車レーダ情報Rj1は、自車処理部104の図示しない記憶部に記憶されると同時に自車通信部102によって取得され、上述したように無線送信される。
【0066】
上述したように、他車両C2に搭載された他車処理部114も自車処理部104と同様の処理をする。すなわち、他車両C2の他車処理部114にも他車位置測定部111によって測定される他車両C2の位置と、他車レーダ領域の基準となる位置との相対的な位置関係が図示しない記憶部に予め定められている。そして、他車処理部114は、自車処理部104と同様に他車レーダ領域を地図上の絶対的な座標で示される他車レーダ領域T2へ変換する演算をする。
【0067】
さらに、他車両C2に搭載された他車処理部114は、他車レーダ領域T2を演算すると、上述した自車レーダ情報Rj1と同様の情報を他車両C2に搭載された他車レーダ113について示す他車レーダ情報Rj2を生成する。他車レーダ情報Rj2を生成するとき、他車処理部114は、自車処理部104と同様に、当該他車レーダ情報Rj2によって示される情報に当該他車処理部114を搭載している車両に固有の識別子を付加する。また、他車処理部114によって生成される他車レーダ情報Rj2には、上述した自車レーダ103と同様に他車レーダ113によって他車レーダ諸元情報Rg2に含まされた現在使用中の他車周波数帯域を示す情報も含まれる。他車処理部114によって生成された他車レーダ情報Rj2は、他車処理部114の図示しない記憶部に記憶されると同時に他車通信部112によって取得され、上述したように自車通信部102に無線送信される。
【0068】
他車両C3に搭載された他車処理部114も他車両C2に搭載された他車処理部114と同様の処理をする。他車両C3に搭載された他車処理部114は、他車レーダ113a、及び他車レーダ113bからそれぞれ取得した他車レーダ諸元情報Rg2に示されている他車レーダ領域を、地図上の絶対的な座標で示される他車レーダ領域T3a、及び他車レーダ領域T3bへそれぞれ変換する演算をする。そして、他車両C3に搭載された他車処理部114は、他車レーダ領域T3a、及び他車レーダ領域T3bをそれぞれ演算すると、自車レーダ情報Rj1と同様の情報を他車両C3に搭載された他車レーダ113a、及び他車レーダ113bについて示す他車レーダ情報Rj2を生成する。このとき、他車両C3に搭載された他車処理部114は、他車レーダ113a、及び他車レーダ113bの2つのレーダの情報をそれぞれ示す2つの他車レーダ情報Rj2(a)、及び他車レーダ情報Rj2(a)を生成する。他車両C3に搭載される他車処理部114によって生成された他車レーダ情報Rj2は、他車処理部114の図示しない記憶部に記憶されると同時に他車通信部112によって取得され、上述したように自車通信部102に無線送信される。
【0069】
それぞれの他車両の他車レーダ干渉回避装置11に備えられる他車通信部112によって無線送信された他車レーダ情報Rj2は、自車通信部102を介して、自車処理部104によって取得される。尚、自車通信部102が無線通信をする通信網には、自車レーダ情報Rj1、及び他車レーダ情報Rj2を含むあらゆる情報が伝送されており、自車通信部102は、これらの情報を逐次取得し、取得した情報の中から他車レーダ情報Rj2によって示される他車位置情報Ji2に基づき、自車位置情報Ji1を基準とする予め定められた範囲(以下、取得範囲と称する)以内に存在する他車両の他車レーダ情報Rj2のみを選択するものとする。
【0070】
また、他車両C2に搭載されている他車通信部112も自車通信部102と同様に、無線通信をする通信網に伝送されているあらゆる情報を逐次取得し、取得した情報の中から他車レーダ情報Rj2によって示される他車位置情報Ji2に基づき、他車通信部112を搭載しているそれぞれの他車両の他車位置情報Ji2を基準とする取得範囲以内に存在する他車両の他車レーダ情報Rj2を選択するものとする。尚、他車両C2に搭載されている他車通信部112によって選択される情報には、他車レーダ情報Rj2だけでなく、他車両C2から見た他車両、すなわち、自車両C1の自車レーダ情報Rj1も含まれる。つまり、他車両C2の搭載位置を基準とする取得範囲内に自車両C1が存在するとき、他車通信部112は、自車両C1の自車レーダ情報Rj1も選択して取得する。他車両C3に搭載されている他車通信部112も、他車両C2に搭載されている他車通信部112と同様に、自車レーダ情報Rj1、及び他車レーダ情報Rj2を選択して取得する。
【0071】
本実施形態では、一例として、自車両C1、他車両C2、及び他車両C3が、それぞれ互いに前述の取得範囲内に存在するものとして説明を続ける。つまり、自車処理部104は、自車通信部102を介して、他車両C2から無線送信された他車レーダ情報Rj2と他車両C3から無線送信された他車レーダ情報Rj2とをそれぞれ取得する。尚、前述の取得範囲は、自車通信部102、及び互いの他車通信部112の間で、互いに同じ範囲であってもよいし、互いに異なる範囲であってもよい。
【0072】
自車処理部104は、自車通信部102を介してそれぞれの他車両の他車レーダ情報Rj2を取得すると、既に図示しない記憶部に記憶した自車レーダ情報Rj1と、取得した他車レーダ情報Rj2とをレーダ情報Shとして纏めて記憶する。図4は、自車処理部104が図示しない記憶部に記憶するレーダ情報Shの一例を示す図である。本実施形態では、自車両C1の自車処理部104によって生成された自車レーダ情報Rj1と、他車両C2の他車処理部114によって生成された他車レーダ情報Rj2と、他車両C3の他車処理部114によって生成された他車レーダ情報Rj2とがレーダ情報Shに含まれる。尚、図4に示すアスタリスクは、レーダ情報Shに含まれる情報がそれぞれ生成されたときにおいて、自車レーダ103と、他車両C2の他車レーダ113と、他車両C3の他車レーダ113(他車レーダ113a、及び113b)とがそれぞれ使用している周波数帯域を示す。
【0073】
上述したように、自車両C1、他車両C2、及び他車両C3が、それぞれ互いに前述の取得範囲内に存在するため、他車両C2に搭載された他車処理部114も自車処理部104と同様に、他車通信部112を介して、自車両C1の自車通信部102から無線送信された自車レーダ情報Rj1と、他車両C3の他車通信部112から無線送信された他車レーダ情報Rj2とを受信して取得する。そして、他車両C2に搭載された他車処理部114は、取得した自車レーダ情報Rj1と、他車両C3の他車レーダ情報Rj2と、既に当該他車両C2の他車処理部114によって生成された他車レーダ情報Rj2とをレーダ情報Shとして記憶する。このため、他車両C2に搭載された他車処理部114も、自車処理部104に記憶されているレーダ情報Shと同じレーダ情報Shを記憶する。他車両C3に搭載された他車処理部114も、他車両C2に搭載された他車処理部114と同様に、自車処理部104に記憶されているレーダ情報Shと同じレーダ情報Shを記憶する。
【0074】
レーダ情報Shを記憶すると、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114のそれぞれは、記憶したレーダ情報Shに含まれる識別子IC1乃至IC3を比較する。そして、自車処理部104、及びそれぞれの他車処理部114は、識別子IC1乃至IC3をそれぞれ比較した結果に基づき、レーダの干渉を回避するための処理を実行する指示処理部を自車処理部104、及びそれぞれの他車処理部114の中から判断する。
【0075】
自車処理部104、及びそれぞれの他車処理部114が、識別子IC1乃至IC3に基づいて指示処理部を判断する方法は、任意の方法を用いて構わない。それぞれの処理部が指示処理部を判断する方法の一例としては、それぞれの処理部を搭載する車両の製造番号の数字を前述の識別子とし、それぞれの処理部が、識別子IC1乃至IC3の中から最も小さい製造番号の数字を示す識別子に対応する車両に搭載された処理部(自車処理部104、或いは他車処理部114)を指示処理部として判断する方法を用いてもよい。自車処理部104、及び他車処理部114が共に識別子IC1乃至IC3の中から最も小さい数字を示す識別子に対応する車両に搭載された処理部を判断することによって、互いの処理部の間で一致した指示処理部を一意に定めることができる。以下では、自車両C1の識別子IC1によって示される数字が最も小さく、自車処理部104が指示処理部として処理を進めるものとして説明を続ける。尚、識別子の判断の結果によって指示処理部が定まると、指示処理部として定まらなかった処理部は、それぞれ指示処理部として定めた処理部、すなわち、自車処理部104から後述する指示情報Sj1を与えられるまで待機するものとする。
【0076】
自車処理部104は、指示処理部として処理を開始すると、レーダ情報Shに基づいて自車レーダ103と干渉する可能性のある他車レーダ113を特定する処理を開始する。本実施形態において、自車レーダ103と干渉する可能性のある他車レーダ113とは、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射し、且つ自車レーダ103の自車周波数帯域と重複する他車周波数帯域で電磁波を放射する他車レーダ113である。
【0077】
したがって、自車処理部104は、指示処理部として処理を開始すると、まず、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダを、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113(他車レーダ113a、及び113b)の中から、レーダ情報Shに基づいて特定する。図3から明らかなように、自車レーダ領域T1と重複する他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)に電磁波を放射する他車レーダは、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aである。したがって、本実施形態では、自車処理部104は、指示処理部として処理を開始すると、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aを特定する。
【0078】
次に、自車処理部104は、レーダ情報Shによって示される現在使用中の自車周波数帯域と、現在使用中の他車周波数帯域とを比較して、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aの中から、自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを特定する。
【0079】
このとき、自車処理部104は、まず、レーダ情報Shに基づいて、自車レーダ103の現在使用中の自車周波数帯域を認識する。現在使用中の自車周波数帯域を認識すると、自車処理部104は、認識した自車周波数帯域と、レーダ情報Shによって示される現在使用中の全ての他車周波数帯域とをそれぞれ比較して、認識した自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを特定する。
【0080】
図4に示すレーダ情報Shから明らかなように、他車両C2の他車レーダ113、及び他車両C3の他車レーダ113aの内、自車レーダ103が現在使用中の自車周波数帯域F1と重複する他車周波数帯域を現在使用している他車レーダは、他車両C2に搭載される他車レーダ113と他車両C3に搭載されている他車レーダ113aとの両方である。したがって、自車処理部104は、自車レーダ103と干渉する可能性のある他車レーダとして、他車両C2に搭載されている他車レーダ113と他車両C3に搭載されている他車レーダ113aとを特定する。
【0081】
自車レーダ103と干渉する可能性のある他車レーダを特定すると自車処理部104は、自車レーダ103の自車周波数帯域と特定した他車レーダの他車周波数帯域とが重複しないように、自車レーダ103、及び特定した他車レーダの少なくともいずれか一方に周波数帯域を変更させて、互いの電磁波が干渉しない状態となるように指示を与える。
【0082】
上述したように、自車レーダ103と他車レーダとが実際に干渉するのは、一方の放射する電磁波が他方のアンテナに到達し、且つ互いの周波数帯域(自車周波数帯域、及び他車周波数帯域)が重複するときである。そこで、本実施形態では、自車レーダ領域(自車レーダ領域T1)と他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)とが重複するとき、すなわち、一方の放射する電磁波が他方のアンテナに到達する前に、自車レーダ103の自車周波数帯域と、他車レーダの他車周波数帯域とが重複しないように、自車処理部104が自車周波数帯域と他車周波数帯域との少なくともいずれか一方を変更する指示を与える。これにより、自車レーダ103と干渉する可能性のある他車レーダ113とが実際に干渉する前に、互いの周波数帯域を重複しないように変更する対策を講じることができ、正確な対象物の測定を続けることができる。
【0083】
自車処理部104が、自車レーダ103の自車周波数帯域と他車レーダ113の他車周波数とが重複しないように変更する指示を与えるときは、まず、レーダ情報Shに基づいて、自車レーダ103と干渉する可能性のある他車レーダの中から、他車周波数帯域を変更することが不可能な他車レーダを特定する。本実施形態では、自車処理部104は、他車両C2の他車レーダ113と他車両C3の他車レーダ113aとの中から、レーダ情報Shによって示されるそれぞれの他車レーダの他車周波数変更可否情報に基づいて、他車周波数を変更することが不可能なレーダを特定する。図4に示すレーダ情報Shから明らかなように、他車両C2の他車レーダ113は、他車周波数変更可否情報が「否」となっており、他車両C3の他車レーダ113aは、他車周波数変更可否情報が「可」となっている。
【0084】
このため、自車処理部104は、他車周波数帯域を変更することが不可能な他車レーダとして、他車両C2に搭載された他車レーダ113を特定する。他車周波数帯域を変更することが不可能な他車レーダを特定したとき、自車処理部104は、自車レーダ103の自車周波数帯域を、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダの他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与える。これにより、自車レーダ103と干渉する可能性のあるレーダの中に、他車周波数帯域を変更することのできない他車レーダが存在したとしても、自車レーダ103が自車周波数帯域を変更するため、自車レーダ103から放射する電磁波が他車レーダのアンテナに到達して実際に干渉が生じることがなくなる。
【0085】
本実施形態では、自車処理部104が、自車レーダ領域T1と重複する他車レーダ領域T2、及び他車レーダ領域T3aにそれぞれ電磁波を放射する他車レーダ113、及び他車レーダ113aのそれぞれの現在使用している他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与える。図4に示すレーダ情報Shから明らかなように、自車レーダ103が変更可能な自車周波数帯域F1、及びF3の中で、他車両C2に搭載された他車レーダ113、及び他車両C3に搭載された他車レーダ113aの他車周波数帯域F1と重複しない自車周波数帯域は自車周波数帯域F3である。したがって、自車処理部104は、自車レーダ103に対して自車周波数帯域F1を自車周波数帯域F3へ変更する指示を与える。
【0086】
一方、自車処理部104が、他車周波数帯域を変更することが不可能な他車レーダを特定できないとき、すなわち、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダが全て他車周波数帯域を変更することが可能なときには、自車処理部104は、全ての他車レーダに対して自車周波数帯域と重複しない他車周波数帯域に変更する指示を指示情報Sj1として生成する。
【0087】
このとき、自車処理部104は、指示情報Sj1に現在使用中の自車周波数帯域を示す情報を含ませて、指示情報Sj1を生成する。そして、自車処理部104によって生成された指示情報Sj1を、上述したように自車通信部102、及び他車通信部112を介して取得したそれぞれの他車処理部114は、取得した指示情報Sj1に含まれる自車周波数帯域と重複しない他車周波数帯域をそれぞれ図示しない記憶部に記憶しているレーダ情報Shに基づいて判断して、判断した他車周波数帯域に変更する指示をそれぞれの他車レーダ113に与える。これにより、全ての他車レーダ113の他車周波数帯域が自車周波数帯域と重複しないように変更されるため、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0088】
自車処理部104は、自車レーダ103の自車周波数帯域と他車レーダの他車周波数帯域とが重複しないように変更する指示を与えると、指示処理部としての処理をしていない他車処理部114に対して待機を中止し、処理を再開する指示を示す指示情報Sj1を生成する。本実施形態では、自車処理部104は、自車レーダ103の自車周波数帯域と他車レーダの他車周波数帯域とが重複しないように変更する指示を、自車レーダ103、又は他車レーダ113に対して与えると、他車両C2、及び他車両C3の他車処理部114に対して処理を再開する指示を示す指示情報Sj1を生成する。処理を再開する指示を示す指示情報Sj1を生成すると、自車処理部104は、指示処理部としての処理を完了する。
【0089】
処理を再開する指示情報Sj1が生成されると、自車通信部102は、生成された指示情報Sj1を取得して、他車通信部112へ無線送信する。自車通信部102から無線送信された指示情報Sj1は、他車両C2、及び他車両C3の他車通信部112を介して、それぞれの他車両の他車処理部114によって取得される。それぞれの他車両の他車処理部114は、処理を再開する指示を示す指示情報Sj1を取得すると処理を再開する。
【0090】
自車処理部104が指示処理部としての処理を完了し、他車処理部114がそれぞれ処理を再開した後、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114は、上述で説明した指示処理部を定めるまでの処理を繰り返す。
【0091】
そして、指示処理部が決定した後は、自車処理部104、他車両C2の他車処理部114、及び他車両C3の他車処理部114の中から指示処理部として定まった処理部が、上述した指示処理部の処理を開始し、他の処理部は待機をする。
【0092】
例えば、他車両C2の他車処理部114が指示処理部として処理を進める場合は、当該他車処理部114が上述の説明における自車処理部104と同様の処理をし、自車両C1の自車処理部104、及び他車両C3の他車処理部114が、それぞれ上述の説明における他車両C2の他車処理部114と同様の処理をする。また、例えば、他車両C2の他車処理部114が指示処理部として処理をするときは、他車処理部114が取得、又は生成する他車レーダ諸元情報Rg2、他車レーダ情報Rj2、他車位置情報Ji2、及び指示情報Sj2のそれぞれが、自車処理部104が指示処理部として処理をするときについて説明した上述の説明における自車レーダ諸元情報Rg1、自車レーダ情報Rj1、自車位置情報Ji1、及び指示情報Sj1のそれぞれに相当する。これは、他車両C3の他車処理部114が指示処理部として処理をするときも同様である。以上が、本実施形態に係る自車処理部104と、他車処理部114との処理の詳細な説明である。
【0093】
次に、上述した自車処理部104(他車処理部114)の処理を、図5に示すフローチャートを参照しながら説明する。
【0094】
ステップS101において、自車処理部104は、自車位置情報Ji1を自車位置測定部101から取得し、自車レーダ諸元情報Rg1を自車レーダ103から取得する。自車処理部104は、ステップS101の処理を完了すると、ステップS102へ処理を進める。
【0095】
ステップS102において、自車処理部104は、ステップS101において取得した自車レーダ諸元情報Rg1によって示される自車レーダ領域を、上述したように地図上における絶対的な座標で示される領域へ変換する演算をする。自車処理部104は、ステップS102の処理を完了すると、ステップS103へ処理を進める。
【0096】
ステップS103において、自車処理部104は、ステップS101において取得した自車レーダ諸元情報Rg1によって示される複数の自車周波数帯域、自車周波数帯域変更可否情報、同じくステップS101において取得した自車位置情報Ji1、及びステップS102において演算した自車レーダ領域をそれぞれ示す上述した自車レーダ情報Rj1を生成する。自車処理部104は、自車レーダ情報Rj1を生成すると、生成した自車レーダ情報Rj1を図示しない記憶部に記憶する。尚、ステップS103において、自車処理部104によって生成された自車レーダ情報Rj1は、上述したように自車通信部102を介して無線送信される。自車処理部104は、ステップS103の処理を完了すると、ステップS104へ処理を進める。
【0097】
ステップS104において、自車処理部104は、取得範囲内に存在する他車両の他車通信部112から無線送信される他車レーダ情報Rj2を自車通信部102を介して取得する。自車処理部104は、ステップS104の処理を完了すると、ステップS105へ処理を進める。
【0098】
ステップS105において、自車処理部104は、ステップS103において記憶した自車レーダ情報Rj1と、ステップS104において取得した他車レーダ情報Rj2とを纏めてレーダ情報Shとして、図示しない記憶部に記憶する。自車処理部104は、ステップS105の処理を完了すると、ステップS106へ処理を進める。
【0099】
ステップS106において、自車処理部104は、レーダ情報Shに含まれる識別子に基づいて、自車処理部104、及びステップS104において取得した他車レーダ情報Rj2を送信した他車両の他車処理部114の中から、上述した方法で指示処理部を定める。自車処理部104は、ステップS106の処理を完了すると、ステップS107へ処理を進める。
【0100】
ステップS107において、自車処理部104は、ステップS106の処理をすることによって当該自車処理部104が指示処理部となったか否かを判断する。自車処理部104は、ステップS106において、指示処理部となったと判断すると、ステップS110へ処理を進める。一方、自車処理部104は、ステップS106において、指示処理部ではないと判断すると、ステップS108へ処理を進める。
【0101】
ステップS108〜ステップS109、及びステップS108〜ステップS109〜ステップS116の処理は、自車処理部104(他車処理部114)が指示処理部ではないときに進められる処理である。ステップS108において、自車処理部104は、他車両から無線送信される指示情報Sj2を取得したか否かを判断する。自車処理部104は、ステップS108において、指示情報Sj2を取得したと判断すると、ステップS109へ処理を進める。一方、自車処理部104は、ステップS108において、指示情報Sj2を取得していないと判断すると、ステップS108の処理を繰り返す。自車処理部104が、ステップS108において、指示情報Sj2を取得するまでステップS108の処理を繰り返すことにより、指示情報Sj2を取得するまで待機をすることとなる。
【0102】
尚、ステップS108において、自車処理部104が取得したか否かを判断する指示情報Sj2とは、自車処理部104が、指示処理部としての処理をしていないときに、指示処理部としての処理をしている他車両の他車処理部114から取得する指示情報である。つまり、指示情報Sj2とは、指示処理部として処理をしている処理部によって生成される指示情報であり、自車処理部104が指示処理部として処理をしている場合を説明した上述の説明における指示情報Sj1に相当する。
【0103】
ステップS109において、自車処理部104は、ステップS108において取得したと判断した指示情報Sj2が処理の再開を指示する情報であるか否かを判断する。自車処理部104は、ステップS109において、取得した指示情報Sj2が処理の再開を指示する情報であるとき、ステップS101へ処理を戻す。一方、自車処理部104は、ステップS109において、取得した指示情報Sj2が処理の再開を指示する情報でないときは、当該情報が自車レーダ103の自車周波数帯域を変更する指示を含む情報であると判断して、ステップS116へ処理を進める。
【0104】
ステップS110において、自車処理部104は、上述した指示処理部としての処理を開始して、ステップS105において記憶したレーダ情報Shによって示される、地図上における絶対的な領域へ変換した後の自車レーダ領域と、全ての他車レーダ113の他車レーダ領域とに基づいて、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定する処理をする。自車処理部104は、ステップS110の処理を完了すると、ステップS111へ処理を進める。
【0105】
ステップS111において、自車処理部104は、ステップS110で自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS111において、他車レーダ113を特定できたと判断したとき、ステップS112へ処理を進める。一方、自車処理部104は、ステップS111において、他車レーダ113を特定できないと判断したとき、ステップS101へ処理を戻す。
【0106】
ステップS112において、自車処理部104は、ステップS110において特定した他車レーダ113の中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている自車周波数帯域と、他車レーダ113によって現在使用されている他車周波数帯域とを比較して、自車周波数帯域と重複する他車周波数帯域の他車レーダ113を特定する処理をする。自車処理部104は、ステップS112の処理を完了すると、ステップS113へ処理を進める。
【0107】
ステップS113において、自車処理部104は、ステップS112で自車周波数帯域と重複する他車周波数帯域の他車レーダ113を特定できたか否か、すなわち、自車レーダ103と干渉する可能性のある他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS113において、他車レーダ113を特定できたと判断したとき、ステップS114へ処理を進める。一方、自車処理部104は、ステップS113で他車レーダ113を特定できないと判断したとき、自車レーダ103と干渉する可能性のあるレーダは存在しないと判断して、ステップS101へ処理を戻す。
【0108】
ステップS114において、自車処理部104は、レーダ情報Shによって示される他車周波数帯域変更可否情報に基づき、ステップS112で特定した他車レーダ113の中から他車周波数帯域を変更することが不可能な他車レーダ113を特定する処理をする。自車処理部104は、ステップS114の処理を完了すると、ステップS115へ処理を進める。
【0109】
ステップS115において、自車処理部104は、ステップS114で他車周波数帯域を変更することが不可能な他車レーダ113を特定できたか否かを判断する。自車処理部104は、ステップS115において、他車レーダ113を特定できたと判断したとき、ステップS116へ処理を進める。一方、自車処理部104は、ステップS115において、他車レーダ113を特定できないと判断したとき、ステップS117へ処理を進める。
【0110】
ステップS116において、自車処理部104は、レーダ情報Shによって示される全ての他車レーダ113の現在使用中の他車周波数帯域と重複しない自車周波数帯域を選択し、選択した自車周波数帯域へ変更する指示を自車レーダ103に対して与える。さらに、ステップS116において、自車処理部104は、ステップS104において取得した他車レーダ情報Rj2を生成した他車処理部114、すなわち、取得範囲に存在する他車両の他車処理部114に対して処理を再開する指示を示す指示情報Sj1を生成する。自車処理部104は、ステップS116の処理を完了すると、ステップS101へ処理を戻す。
【0111】
ステップS117において、自車処理部104は、ステップS112で特定した他車レーダ113に対して、レーダ情報Shに基づき自車レーダ103の現在使用中の自車周波数帯域を示す情報を含み、当該自車周波数帯域と重複しない他車周波数帯域に変更させる指示を与える指示情報Sj1を生成する。
【0112】
以上が、本実施形態に係る自車処理部104の処理を示すフローチャートの説明である。尚、上述の説明では、指示処理部として処理をする自車処理部104が、現在使用中の自車周波数帯域に重複する他車周波数帯域で電磁波を放射する他車レーダを特定したとき、特定した他車レーダの中から他車周波数帯域を変更することが不可能な他車レーダを特定するものとした。しかしながら、自車処理部104は、現在使用中の自車周波数帯域に重複する他車周波数帯域で電磁波を放射する他車レーダを特定したとき、特定した他車レーダの中から他車周波数帯域を変更することが不可能な他車レーダをさらに特定することなく、直ちに、特定した全ての他車レーダの他車周波数帯域をレーダ情報Shに基づいて認識し、認識した他車周波数帯域と重複しない自車周波数帯域に変更する指示を自車レーダ103に与えてもよい。これにより、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダのアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0113】
また、自車処理部104は、自車レーダ103との干渉を回避できるのであれば、他車周波数帯域を変更することが可能な他車レーダの中で他車レーダ領域が最も小さい他車レーダ113に対して他車周波数帯域を変更させる指示を与えてもよい。
【0114】
上述の従来技術では、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信することによって生じる干渉を検出しない限り、干渉を回避するための対策を講じることができなかった。しかしながら、本実施形態では、上述したように自車レーダ領域(自車レーダ領域T1)と他車レーダ領域(他車レーダ領域T2、及び他車レーダ領域T3a)とが重複するとき、すなわち、一方の放射する電磁波が他方のアンテナに到達する前に、互いの周波数帯域を重複しないように変更する対策を講じるため、実際に干渉を検出してから対策を講じることを完了するまでの期間、すなわち、対象物を測定できない期間をなくすことができる。
【0115】
また、上述の従来技術に限らず、既に実用化されているレーダの中には、干渉が生じると、受信した反射波のS/N比が低下して、測定範囲内に対象物が存在するのにも拘わらず検出することができず、測定範囲内に存在する対象物を見落としてしまうレーダもある。しかしながら、本実施形態では、自車レーダ103と干渉する可能性のある他車レーダ113とが実際に干渉する前に、互いの周波数帯域を重複しないように変更する対策を講じることができ、干渉が生じることによって測定範囲内に存在する対象物を見落としてしまうことを防げる。
【0116】
(第1の変形例)
上述の第1の実施形態では、指示処理部として処理をする自車処理部104が、干渉する可能性のある他車レーダ113を特定するときに、まず、自車レーダ103の自車レーダ領域T1に重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定するものとした。しかしながら、本発明に係る干渉回避システムは、予め定められた期間(以下、推定期間と称する)が経過したときの自車レーダ領域、及び他車レーダ領域をそれぞれ推定して、推定した自車レーダ領域(以下、推定自車レーダ領域と称する)に重複する、推定した他車レーダ領域(以下、推定他車レーダ領域と称する)に電磁波を放射する他車レーダを特定してもよい。
【0117】
図6は、一例として、図2に示す時点から前述の推定期間だけ経過したときの推定自車レーダ領域ET1、推定他車レーダ領域ET2、推定他車レーダ領域ET3a、及び推定他車レーダ領域ET3bをそれぞれ図2に重畳して示す図である。また、図6に示す自車両EC1、他車両EC2、及び他車両EC3は、それぞれ推定期間だけ経過したときの、自車両C1、他車両C2、及び他車両C3の位置を示す。
【0118】
図6に示すように、指示処理部として処理をする自車処理部104は、推定自車レーダ領域ET1、推定他車レーダ領域ET2、推定他車レーダ領域ET3a、及び推定他車レーダ領域ET3bを推定し、推定自車レーダ領域ET1に重畳する推定他車レーダ領域に電磁波を放射する他車レーダを特定してもよい。そして、推定自車レーダ領域ET1に重畳する推定他車レーダ領域に電磁波を放射する他車レーダを特定した後は、第1の実施形態と同様に、自車処理部104は、自車レーダ103の現在使用中の自車周波数帯域に重畳する他車周波数帯域を現在使用している他車レーダを、レーダ情報Shに基づいて特定してもよい。
【0119】
これにより、自車レーダ干渉回避装置10は、より早く、自車両C1以外に存在する他車両の他車レーダの中から、自車周波数帯域と重複する他車周波数帯域を現在使用している他車レーダを判断する処理を開始することができる。
【0120】
尚、指示処理部として処理をする自車処理部104が、推定自車レーダ領域、及び推定他車レーダ領域を判断する方法としては、前述の推定期間だけ過去に取得したレーダ情報Shによって示される自車位置情報Ji1、及び他車位置情報Ji2と、現在の自車位置情報Ji1、及び現在の他車位置情報Ji2とのそれぞれの差分に基づき、現在よりも推定期間だけ経過したときの自車位置、及び他車位置を推定する方法が一例として挙げられる。
【0121】
推定期間だけ経過したときの自車位置を推定すると、自車処理部104は、自車位置情報Ji1によって示される位置と自車レーダ領域の基準(アンテナの搭載位置)との前述の相対的な位置関係に基づき、自車レーダ諸元情報Rg1によって示される自車レーダ領域を地図上の絶対的な座標で示される推定期間だけ経過したときの領域を演算することにより、推定自車レーダ領域を推定することができる。
【0122】
また、推定期間だけ経過したときの他車位置を推定すると、自車処理部104は、現在の他車位置情報Ji2によって示される他車位置と、推定した他車位置との差分を、現在の他車レーダ領域の地図上の絶対的な座標にそれぞれ加算することにより、推定他車レーダ領域を推定することができる。
【0123】
(第2の変形例)
第1の実施形態では、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定したとき、特定した他車レーダ113の中から、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用中の他車レーダ113を特定する処理を、全ての他車レーダ113について同時にするものとした。しかしながら、指示処理部として処理をする自車処理部104は、自車レーダ領域T1と重複する他車レーダ領域に電磁波を放射する他車レーダを特定したとき、レーダ情報Shによってそれぞれ示される自車位置情報Ji1と他車位置情報Ji2とに基づき、特定した他車レーダ113の内、自車両C1に近い他車両の他車レーダ113から順番に、現在使用中の自車周波数帯域と重複する他車周波数帯域を現在使用しているか否かを判断して、特定してもよい。
【0124】
このとき、指示処理部として処理をしている自車処理部104は、さらに、自車レーダ103が現在使用中の自車周波数帯域と重複している他車周波数帯域を使用していると特定した他車レーダ113から順番に、自車レーダ103の自車周波数帯域と、特定した他車レーダ113の他車周波数帯域とが重複しないように、自車レーダ103、及び当該他車レーダ113の少なくともいずれか一方に対して周波数帯域を変更させる指示を与えてもよい。さらに、このとき、自車処理部104は、レーダ情報Shに示される他車レーダ113の他車周波数帯域変更可否情報に基づいて、第1の実施形態と同様に自車レーダ103、及び他車レーダのいずれに周波数帯域を変更させる指示を与えるかの判断をしてもよい。
【0125】
指示処理部として処理をする自車処理部104が、自車レーダ103に近い位置に存在する他車両の他車レーダから順番に干渉するか否かの判断をし、互いのレーダの周波数帯域を重複しない周波数帯域に変更することにより、自車両と衝突する危険性がより高い位置に存在する他車両の他車レーダを優先して干渉を回避して、正確な測定をすることができる。
【0126】
(第2の実施形態)
本発明において、自車レーダ103、及び他車レーダ113として用いることのできるレーダは、放射する電磁波に、予め定められた系列の符号信号を重畳するレーダであってもよい。予め定められた系列の符号信号を重畳した電磁波を放射することにより、受信した反射波と放射した電磁波との相関に基づいて、受信した反射波が、自身から放射された電磁波の反射波であるか、他のレーダから放射された電磁波を受信したものであるかを判断することができる。自車レーダ103、及び他車レーダ113が電磁波に重畳する符号信号の系列としては、M系列、及びGold系列などが一例として挙げられる。このように、放射する電磁波に予め定められた系列の符号信号を重畳するレーダは、既に実用化されている。
【0127】
ただし、自車レーダ103、及び他車レーダ113が電磁波に重畳する符号信号の系列が、互いに同じであるか否かに拘わらず、重畳する符号信号のパターンが、図7に示すように互いに同じパターンであると、いずれか一方のレーダが、他方のレーダから放射された電磁波を反射波として受信したときと、自レーダから放射された電磁波の反射波を受信したときとの間で相関の差異が不明瞭になる。このため、自車レーダ103、及び他車レーダ113が、図7に示すように互いに同じパターンの符号信号を重畳すると、他方のレーダから干渉を受けてしまう。つまり、放射する電磁波に予め定められた系列の符号信号を重畳するレーダでは、第1の実施形態で述べたように互いの周波数帯域が重複するとき以外のときでも、干渉することがある。尚、図7には、一例として、互いに異なる系列であって、且つ同じパターンの符号信号を示している。
【0128】
そこで、第2の実施形態に係る干渉回避システム2は、自車レーダ103、及び他車レーダ113がそれぞれ符号信号を重畳した電磁波を放射する場合に、互いに異なるパターンの符号信号を重畳して電磁波を放射するようにしてもよい。以下、第2の実施形態に係る干渉回避システム2の処理について説明する。尚、第2の実施形態に係る干渉回避システム2の機能構成は、第1の実施形態に係る干渉回避システム1と同じであるため説明を省略する。
【0129】
第1の実施形態では、指示処理部として処理をしている自車処理部104が、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113の中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている自車周波数帯域と、他車レーダ113によって現在使用されている他車周波数帯域とを比較して、自車周波数帯域と重複する他車周波数帯域の他車レーダ113を、自車レーダ103と干渉する可能性のあるレーダとして特定するものとした。
【0130】
これに対して、第2の実施形態では、指示処理部として処理をする自車処理部104が、第1の実施形態と同様に自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダを特定した後、特定した他車レーダの中から、レーダ情報Shに基づいて、自車レーダ103によって現在使用されている符号信号のパターン(以下、自車符号パターンと称する)と、他車レーダ113によって現在使用されている符号信号のパターン(以下、他車符号パターンと称する)とを比較して、自車符号パターンと略一致する他車符号パターンの他車レーダ113を、自車レーダ103と干渉する可能性のあるレーダとして特定する。
【0131】
そして、自車レーダ103と干渉する可能性のあるレーダとして、自車レーダ103によって現在使用されている自車符号パターンと略一致する他車符号パターンを現在使用している他車レーダ113を特定すると、自車処理部104は、特定した他車レーダ113の他車符号パターンと自車レーダ103の自車符号パターンとが略一致しないように、自車レーダ103、及び他車レーダ113の少なくともいずれか一方に符号パターンを変更させる指示を与える。これにより、自車レーダ103、及び他車レーダ113は、放射した電磁波と受信した反射波との相関に基づいて、受信した反射波が、他のレーダから放射された電磁波か、自身が放射した電磁波が対象物で反射した反射波であるかを判断することができるため、上述した説明と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0132】
第2の実施形態において、指示処理部として処理をする自車処理部104が干渉する可能性のある他車レーダを特定するためには、自車レーダ103が記憶する自車レーダ諸元情報Rg1に自車レーダ103が現在使用中の自車符号パターン、自車符号パターン変更可否情報、及び変更可能な複数の自車符号パターンを示す情報を含ませておく必要がある。これにより、自車レーダ103から自車レーダ諸元情報Rg1を取得した自車処理部104は、自車レーダ103が現在使用中の自車符号パターン、自車符号パターン変更可否情報、及び変更可能な複数の自車符号パターンを示す情報を含む自車レーダ情報Rj1を第1の実施形態と同様に生成することができる。
【0133】
自車レーダ103と同様に、他車レーダ113は、当該他車レーダ113が記憶する他車レーダ諸元情報Rg1に、現在使用中の他車符号パターン、他車符号パターン変更可否情報、及び変更可能な他車符号パターンを示す情報を含ませておく必要がある。これにより、他車レーダ113から他車レーダ諸元情報Rg1を取得した他車処理部114は、他車レーダ113が現在使用中の他車符号パターン、他車符号パターン変更可否情報、及び変更可能な他車符号パターンを示す情報を含む他車レーダ情報Rj2を第1の実施形態と同様に生成することができる。
【0134】
そして、自車処理部104は、指示処理部として処理をするときに、第1の実施形態と同様に自車レーダ情報Rj1と他車レーダ情報Rj2とを取得してレーダ情報Shとして纏めて記憶する。図8は、第2の実施形態に係る自車処理部104、及び他車処理部114がそれぞれ記憶するレーダ情報Shの一例を示す図である。レーダ情報Shを記憶すると、自車処理部104は、自車レーダ103の自車符号パターン、及び他車レーダ113の他車符号パターンが略一致するか否かを、第1の実施形態と同様にレーダ情報Shに基づいて判断し、略一致するときには、互いのレーダが干渉する可能性があると判断して、互いのレーダが放射する電磁波を干渉しない状態にする指示を、自車レーダ103、及び他車レーダ113の少なくともいずれか一方に与える対策を講じることができる。第2の実施形態において、互いのレーダが放射する電磁波が干渉しない状態とは、互いのレーダが放射する電磁波に重畳する符号信号のパターンが互いに略一致しない状態である。
【0135】
自車処理部104は、自車レーダ103の自車符号パターンと他車レーダ113の他車符号パターンとが互いに略一致しないように変更させるとき、まず、レーダ情報Shに基づいて、自車レーダ103と干渉する可能性のある他車レーダ113の中から、他車符号パターンを変更することが不可能な他車レーダ113を特定する。そして、自車処理部104は、他車符号パターンを変更することが不可能な他車レーダ113を特定したとき、自車レーダ103の自車符号パターンを、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113の他車符号パターンと重複しない自車符号パターンに変更する指示を自車レーダ103に与える。
【0136】
一方、自車処理部104が、他車符号パターンを変更することが不可能な他車レーダ113を特定できないとき、すなわち、自車レーダ領域と重複する他車レーダ領域に電磁波を放射する他車レーダ113が全て他車符号パターンを変更することが可能なときには、自車処理部104は、全ての他車レーダ113に対して自車符号パターンと重複しない符号パターンに変更する指示を指示情報Sj1として生成してもよい。
【0137】
このとき、自車処理部104は、指示情報Sj1に現在使用中の自車符号パターンを示す情報を含ませて指示情報Sj1を生成する。そして、自車処理部104によって生成された指示情報Sj1を、上述したように自車通信部102、及び他車通信部112を介して取得したそれぞれの他車処理部114は、取得した指示情報Sj1に含まれる自車符号パターンと重複しない他車符号パターンをそれぞれ図示しない記憶部に記憶しているレーダ情報Shに基づいて判断して、判断した他車符号パターンに変更する指示をそれぞれの他車レーダ113に与える。これにより、全ての他車レーダ113の他車符号パターンが自車符号パターンと略一致しないように変更されるため、第1の実施形態と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0138】
また、自車処理部104は、自車レーダ領域に重複する他車レーダ領域に電磁波を放射する他車レーダ113を特定したとき、特定した他車レーダ113の中から他車符号パターンを変更することが不可能な他車レーダ113をさらに特定することなく、直ちに、特定した全ての他車レーダ113の他車符号パターンをレーダ情報Shに基づいて認識し、認識した他車符号パターンと重複しない自車符号パターンに変更する指示を自車レーダ103に与えてもよい。これにより、第1の実施形態と同様に、自車レーダ103から放射する電磁波が、他車レーダ113のアンテナに到達したとしても実際に干渉が生じることがなくなる。
【0139】
以上が、第2の実施形態に係る干渉回避システム2の説明である。尚、本発明に係る自車レーダ103、及び他車レーダ113がそれぞれ周波数帯域を変更するときは、例えば、76.6GHzであった搬送波周波数を、76.2GHzに変更するなどして周波数帯域を変更してもよい。図9に自車レーダ103、及び他車レーダ113がそれぞれ変更可能な搬送波周波数の一例を示す。図9において、同じ搬送波周波数の内、ISMと付している搬送波周波数は、国際電気通信連合(ITU)によって決定された周波数を示す。また、一般的な車両に搭載されるレーダは、製造メーカーによって採用する搬送波周波数に傾向があるため、この傾向を考慮して、レーダ情報Shによって示される周波数帯域の中から変更後の周波数帯域を選択して、自車レーダ103、又は他車レーダ113に対して指示をしてもよい。
【0140】
また、上述した自車通信部102、及び他車通信部112は、DSRC(Dedicated Short Range Communication)プロトコル、及び無線LAN(Local Area Network)で処理することのできるプロトコルを用いて、直接通信、及び基地局との通信をしてもよい。尚、本発明において無線通信をするために放射/受信する電磁波は、本発明における全てのレーダから放射される電磁波、或いは当該レーダによって受信される反射波とは異なるものであるし、干渉もしないものであることは、言うまでもない。
【0141】
また、他車レーダ干渉回避装置20は、図1に示すように他車位置測定部111、他車通信部112、他車レーダ113、及び他車処理部114を備える装置であってもよいし、既に他車両に取り付けられている他車位置測定部111(ナビゲーションシステム)、他車通信部112(DSRC通信部、又は無線LAN通信部)、及び他車レーダ113(レーダ)に相当する構成に対して、本発明に係る他車処理部114と同じ処理が可能な処理装置を付加した装置であってもよい。このとき、既に他車両に取り付けられているレーダは、上述した他車レーダ諸元情報Rg2を記憶する記憶部を備えていない場合があるため、当該処理装置が当該レーダの他車レーダ諸元情報Rg2を予め記憶し、既に取り付けられているナビゲーションシステムによって生成される他車位置情報Ji2と、記憶している他車レーダ諸元情報Rg2とに基づいて、上述した他車処理部114と同じ処理をすることで、本発明に係る干渉回避システム1、或いは干渉回避システム2を構成することができる。
【0142】
これにより、ナビゲーションシステム、通信部、及びレーダなどを予め備えている一般的な他車両に、前述の処理装置を取り付けるだけで、他車レーダ干渉回避装置20を構成することができる。
【0143】
また、本発明における自車レーダ領域、及び他車レーダ領域は、自車レーダ103、及び他車レーダ113から放射される電磁波が到達する領域を少なくとも含む領域であれば、当該電磁波が到達する領域と同じであってもよいし、自車両、或いは他車両の走行している車線の対向車線を含む領域であってもよい。
【0144】
また、上述の第1の実施形態と第2の実施形態とを組み合わせたレーダ干渉回避システムも実現可能であることは言うまでもない。すなわち、自車周波数帯域、及び自車符号パターンの内、少なくともいずれか一方を変更可能である自車レーダ103を用いてもよい。そして、指示処理部として自車処理部104が処理をする場合を一例として説明すると、他車周波数帯域、及び他車符号パターンの内、変更可能であるものが互いに異なる他車レーダ113を少なくとも含む複数の他車レーダ113が、自車レーダ領域に重複する領域に電磁波を放射するときに、自車レーダ103の自車周波数帯域、自車符号パターン、他車周波数帯域、及び他車符号パターンの内、変更可能なものを自車レーダ103、及び複数の他車レーダ113に対して変更させる指示をして干渉を回避してもよい。
【0145】
また、上述の説明では自車レーダ干渉回避装置10は、自車両の前方、後方、及び側方などの複数の方向に存在する対象物をそれぞれ測定する複数の自車レーダ103を搭載してもよいこととした。具体的に説明すると、自車レーダ干渉回避装置10は、図10に示すように1以上の自車レーダ103を必要とされる測定範囲や測定方向に応じて備えていてもよい。さらに、自車レーダ干渉回避装置10が複数の自車レーダ103を備えるときには、互いの自車レーダ103の自車周波数帯域が異なっていてもよい。他車レーダ干渉回避装置20の他車レーダ113についても同様である。
【0146】
また、自車レーダ干渉回避装置10が、上述したように対象物の存在する方向の角度を測定できる自車レーダ103を備えるとき、当該自車レーダ103は図11に示すようにレーダーの中心軸と、相対角の測定範囲の中心軸、すなわち、上下角度或いは水平角度の測定範囲の中心軸とは、必ずしも一致しなくてもよい。これは、他車レーダ干渉回避装置20の他車レーダ113についても同様である。
【0147】
また、上述の自車処理部104、及び他車処理部114はそれぞれ、記憶装置(ROM、RAM、ハードディスク等)に格納された上述した処理手順を実施可能な所定のプログラムデータが、LSI、CPU或いはマイクロコンピュータなどによって解釈実行されることで実現されてもよい。CPUとは、自動車などの移動体に搭載されるECU(Electric Control Unit)を構成するCPUなどであってもよい。また、この場合、プログラムデータは、記憶媒体を介して記憶装置内に導入されてもよいし、記憶媒体上から直接実行されてもよい。尚、記憶媒体とは、ROMやRAMやフラッシュメモリなどの半導体メモリ、フレキシブルディスクやハードディスクなどの磁気ディスクメモリ、CD−ROMやDVDやBDなどの光ディスクメモリ、及びメモリカードなどであってもよい。また、上述の自車レーダ干渉回避装置10、及び他車レーダ干渉回避装置20をそれぞれ構成する1つ、又は複数の機能ブロックを、1つ、又は複数の電子回路、LSI、CPU、及びマイクロコンピュータなどを組み合わせて実現してもよい。
【0148】
以上、本発明を詳細に説明してきたが、上述の説明はあらゆる点において本発明の一例にすぎず、その範囲を限定しようとするものではない。本発明の範囲を逸脱することなく種々の改良や変形を行うことができることは言うまでもない。
【産業上の利用可能性】
【0149】
本発明によれば、他車両に搭載されたレーダ装置から放射される電磁波を反射波として受信せずとも、干渉する可能性があるか否かを判断でき、干渉する可能性があると判断したときに対策を講じることのできるレーダ干渉回避装置、及び当該装置で実行されるレーダ干渉回避方法を提供でき、例えば、車両などの移動体に搭載されるレーダの干渉を回避するレーダ干渉回避装置などに有用である。
【図面の簡単な説明】
【0150】
【図1】本発明に係る干渉回避システム1の機能構成を示す機能ブロック図
【図2】本発明における自車レーダ領域(他車レーダ領域)を説明する図
【図3】本発明に係る干渉回避システム1の処理を説明するための図
【図4】第1の実施形態に係るレーダ情報の一例を示す図
【図5】本発明に係る自車処理部(他車処理部)の処理を示すフローチャート
【図6】第1の実施形態の第1の変形例を説明するための図
【図7】本発明に係る自車レーダ(他車レーダ)が電磁波に重畳する符号信号の一例を示す図
【図8】第2の実施形態に係るレーダ情報の一例を示す図
【図9】本発明に係る自車レーダ(他車レーダ)の使用可能な電磁波の搬送波周波数を示す図
【図10】自車レーダの搭載箇所の一例を示す図
【図11】自車レーダの中心軸と測定方向との一例を示す図
【符号の説明】
【0151】
1 干渉回避システム
2 干渉回避システム
10 自車レーダ干渉回避装置
20 他車レーダ干渉回避装置
101 自車位置測定部
102 自車通信部
103 自車レーダ
104 自車処理部
111 他車位置測定部
112 他車通信部
113 他車レーダ
114 他車処理部
【特許請求の範囲】
【請求項1】
放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、
他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、
前記通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、
前記判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える、レーダ干渉回避装置。
【請求項2】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する領域重複レーダ特定手段を含み、
前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段と前記自車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する、請求項1に記載のレーダ干渉回避装置。
【請求項3】
前記通信手段は、前記他車両のレーダ手段が電磁波、及び反射波をそれぞれ放射、及び受信するときの周波数帯域を他車周波数帯域として示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波を放射するとき、及び反射波を受信するときのそれぞれの周波数帯域を示す自車周波数帯域を前記自車両のレーダ手段の情報に基づき認識する自車周波数認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車周波数認識手段によって認識された前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき判断する重複周波数判断手段とを含み、
前記重複周波数判断手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記重複周波数特定手段によって特定された前記他車両のレーダ手段の少なくとも一方に対して、前記自車周波数帯域と前記他車周波数帯域とが互いに重複しないように変更する指示を与える、請求項2に記載のレーダ干渉回避装置。
【請求項4】
前記通信手段は、前記他車両のレーダ手段が前記他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車周波数帯域を変更することが不可能な前記他車両のレーダ手段を、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第1の指示対象特定手段を含み、
前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。
【請求項5】
前記指示手段は、前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記重複周波数特定手段によって特定された前記他車両のレーダ手段に対して、前記自車周波数帯域、及び互いの前記他車周波数帯域とそれぞれ重複しない前記他車周波数帯域に変更する指示を与える、請求項4に記載のレーダ干渉回避装置。
【請求項6】
前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。
【請求項7】
前記通信手段は、前記他車両のレーダ手段が、前記電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを示す自車符号パターンを前記自車両のレーダ手段の情報に基づき認識する自車符号パターン認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車符号パターン認識手段によって認識された前記自車符号パターンと略一致する前記他車符号パターンを重畳した電磁波を放射する前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定するパターン特定手段とを含み、
前記パターン特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記パターン特定手段によって特定された前記他車両のレーダ手段の少なくともいずれか一方に対して、前記自車符号パターンと前記他車符号パターンとが互いに略一致しないよう変更する指示を与える、請求項2に記載のレーダ干渉回避装置。
【請求項8】
前記通信手段は、前記他車両のレーダ手段が前記他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車符号パターンを変更することが不可能な前記他車両のレーダ手段を、前記パターン特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第2の指示対象特定手段を含み、
前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しないように変更させる指示を与える、請求項7に記載のレーダ干渉回避装置。
【請求項9】
前記指示手段は、前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記パターン特定手段によって特定された前記他車両のレーダ手段に対して、前記自車符号パターン、及び互いの前記他車符号パターンとそれぞれ重複しない前記他車符号パターンに変更するように指示を与える、請求項8に記載のレーダ干渉回避装置。
【請求項10】
前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しない前記自車符号パターンに変更する指示を与える、請求項7に記載のレーダ干渉回避装置。
【請求項11】
前記領域重複レーダ特定手段は、
現在よりも予め定められた期間だけ以前の間の前記自車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記自車領域を推定する自車領域推定手段と、
現在よりも前記予め定められた期間だけ以前の間に前記通信手段によって取得された前記他車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記他車領域を前記他車両のレーダ手段に対応付けて推定する他車領域推定手段とを含み、
前記自車領域推定手段によって推定された前記自車領域と重複する前記他車領域推定手段によって推定された前記他車領域に対応付けられた前記他車両のレーダ手段をさらに特定する、請求項2に記載のレーダ干渉回避装置。
【請求項12】
前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記重複周波数判断手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車周波数帯域から順番に前記自車周波数帯域と比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車周波数帯域を変更する指示を与える、請求項5に記載のレーダ干渉回避装置。
【請求項13】
前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記パターン特定手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車符号パターンと略一致する前記他車符号パターンの前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車符号パターンから順番に前記自車符号パターンと比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車符号パターンを変更する指示を与える、請求項9に記載のレーダ干渉回避装置。
【請求項14】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達する前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。
【請求項15】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達し、且つ当該他車両が走行している車線の対向車線を含む前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達し、且つ当該自車両が走行している車線の対向車線を含む前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。
【請求項16】
放射した電磁波と受信した反射波とに基づき、対象物を測定する自車両、及び他車両のレーダの情報を取得する取得ステップと、
前記取得ステップにおいて取得された自車両のレーダの情報、及び他車両のレーダの情報を示すレーダ情報に基づき、自車両のレーダと他車両のレーダとが互いに干渉する可能性があるか否かを判断する判断ステップと、
前記判断ステップにおいて干渉する可能性があると判断されたとき、自車両のレーダ、及び他車両のレーダの少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示ステップとを備える、レーダ干渉回避方法。
【請求項1】
放射した電磁波と受信した反射波とに基づき、対象物を測定するレーダ手段と、
他車両と無線通信をすることによって、当該他車両のレーダ手段の情報を取得する通信手段と、
前記通信手段によって取得された他車両のレーダ手段の情報、及び自車両のレーダ手段の情報を示すレーダ情報に基づき、自車両のレーダ手段と他車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する判断手段と、
前記判断手段によって干渉する可能性があると判断されたとき、自車両のレーダ手段、及び他車両のレーダ手段の少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示手段とを備える、レーダ干渉回避装置。
【請求項2】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段から放射される電磁波が到達する領域を少なくとも含む予め定められた自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する領域重複レーダ特定手段を含み、
前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段と前記自車両のレーダ手段とが互いに干渉する可能性があるか否かを判断する、請求項1に記載のレーダ干渉回避装置。
【請求項3】
前記通信手段は、前記他車両のレーダ手段が電磁波、及び反射波をそれぞれ放射、及び受信するときの周波数帯域を他車周波数帯域として示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波を放射するとき、及び反射波を受信するときのそれぞれの周波数帯域を示す自車周波数帯域を前記自車両のレーダ手段の情報に基づき認識する自車周波数認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車周波数認識手段によって認識された前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき判断する重複周波数判断手段とを含み、
前記重複周波数判断手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記重複周波数特定手段によって特定された前記他車両のレーダ手段の少なくとも一方に対して、前記自車周波数帯域と前記他車周波数帯域とが互いに重複しないように変更する指示を与える、請求項2に記載のレーダ干渉回避装置。
【請求項4】
前記通信手段は、前記他車両のレーダ手段が前記他車周波数帯域を変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車周波数帯域を変更することが不可能な前記他車両のレーダ手段を、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第1の指示対象特定手段を含み、
前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。
【請求項5】
前記指示手段は、前記第1の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記重複周波数特定手段によって特定された前記他車両のレーダ手段に対して、前記自車周波数帯域、及び互いの前記他車周波数帯域とそれぞれ重複しない前記他車周波数帯域に変更する指示を与える、請求項4に記載のレーダ干渉回避装置。
【請求項6】
前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記重複周波数特定手段によって特定された前記他車両のレーダ手段の前記他車周波数帯域と重複しない前記自車周波数帯域に変更する指示を与える、請求項3に記載のレーダ干渉回避装置。
【請求項7】
前記通信手段は、前記他車両のレーダ手段が、前記電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを他車符号パターンとして示す情報を取得し、
前記判断手段は、
前記自車両のレーダ手段が電磁波に重畳して放射する予め定められた系列の符号信号の符号パターンを示す自車符号パターンを前記自車両のレーダ手段の情報に基づき認識する自車符号パターン認識手段と、
前記領域重複レーダ特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車符号パターン認識手段によって認識された前記自車符号パターンと略一致する前記他車符号パターンを重畳した電磁波を放射する前記他車両のレーダ手段を、前記領域重複レーダ特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定するパターン特定手段とを含み、
前記パターン特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段と前記他車両のレーダ手段とが干渉する可能性があると判断し、
前記指示手段は、前記判断手段によって干渉する可能性があると判断されたとき、前記自車両のレーダ手段、及び前記パターン特定手段によって特定された前記他車両のレーダ手段の少なくともいずれか一方に対して、前記自車符号パターンと前記他車符号パターンとが互いに略一致しないよう変更する指示を与える、請求項2に記載のレーダ干渉回避装置。
【請求項8】
前記通信手段は、前記他車両のレーダ手段が前記他車符号パターンを変更することが可能であるか否かを示す情報をさらに取得し、
前記指示手段は、
前記判断手段によって干渉する可能性があると判断されたとき、前記他車符号パターンを変更することが不可能な前記他車両のレーダ手段を、前記パターン特定手段によって特定された前記他車両のレーダ手段の中から、前記レーダ情報に基づき特定する第2の指示対象特定手段を含み、
前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しないように変更させる指示を与える、請求項7に記載のレーダ干渉回避装置。
【請求項9】
前記指示手段は、前記第2の指示対象特定手段によって前記他車両のレーダ手段が特定されないとき、前記パターン特定手段によって特定された前記他車両のレーダ手段に対して、前記自車符号パターン、及び互いの前記他車符号パターンとそれぞれ重複しない前記他車符号パターンに変更するように指示を与える、請求項8に記載のレーダ干渉回避装置。
【請求項10】
前記指示手段は、前記判断手段によって干渉すると判断されたとき、前記自車両のレーダ手段に対して、前記パターン特定手段によって特定された前記他車両のレーダ手段の前記他車符号パターンと略一致しない前記自車符号パターンに変更する指示を与える、請求項7に記載のレーダ干渉回避装置。
【請求項11】
前記領域重複レーダ特定手段は、
現在よりも予め定められた期間だけ以前の間の前記自車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記自車領域を推定する自車領域推定手段と、
現在よりも前記予め定められた期間だけ以前の間に前記通信手段によって取得された前記他車領域に基づき、現在よりも当該予め定められた期間だけ経過したときの前記他車領域を前記他車両のレーダ手段に対応付けて推定する他車領域推定手段とを含み、
前記自車領域推定手段によって推定された前記自車領域と重複する前記他車領域推定手段によって推定された前記他車領域に対応付けられた前記他車両のレーダ手段をさらに特定する、請求項2に記載のレーダ干渉回避装置。
【請求項12】
前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記重複周波数判断手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車周波数帯域と重複する前記他車周波数帯域の前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車周波数帯域から順番に前記自車周波数帯域と比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車周波数帯域を変更する指示を与える、請求項5に記載のレーダ干渉回避装置。
【請求項13】
前記通信手段は、前記他車両のレーダ手段の位置を他車レーダ位置として示す情報を取得し、
前記パターン特定手段は、
前記自車両のレーダ手段の位置を示す自車レーダ位置を前記自車両のレーダ手段の情報に基づき認識する自車レーダ位置認識手段を含み、
前記自車符号パターンと略一致する前記他車符号パターンの前記他車両のレーダ手段を特定するとき、前記自車レーダ位置認識手段によって認識された前記自車レーダ位置と近い前記他車レーダ位置に存在する前記他車両のレーダ手段の前記他車符号パターンから順番に前記自車符号パターンと比較して特定し、
前記指示手段は、前記他車両のレーダ手段に対して指示を与えるとき、前記他車レーダ位置の内、前記自車レーダ位置と近い位置に存在する前記他車両のレーダ手段から順番に前記他車符号パターンを変更する指示を与える、請求項9に記載のレーダ干渉回避装置。
【請求項14】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達する前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達する前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を、前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。
【請求項15】
前記通信手段は、前記他車両のレーダ手段から放射される電磁波が到達し、且つ当該他車両が走行している車線の対向車線を含む前記他車側領域を前記他車両のレーダ手段に対応付けて示す情報を取得し、
前記領域重複レーダ特定手段は、前記自車両のレーダ手段から放射される電磁波が到達し、且つ当該自車両が走行している車線の対向車線を含む前記自車側領域と重複する前記他車側領域に対応付けられた前記他車両のレーダ手段を前記レーダ情報に基づき特定する、請求項2に記載のレーダ干渉回避装置。
【請求項16】
放射した電磁波と受信した反射波とに基づき、対象物を測定する自車両、及び他車両のレーダの情報を取得する取得ステップと、
前記取得ステップにおいて取得された自車両のレーダの情報、及び他車両のレーダの情報を示すレーダ情報に基づき、自車両のレーダと他車両のレーダとが互いに干渉する可能性があるか否かを判断する判断ステップと、
前記判断ステップにおいて干渉する可能性があると判断されたとき、自車両のレーダ、及び他車両のレーダの少なくとも一方に対して、放射する電磁波を干渉しない状態に変更する指示を与える指示ステップとを備える、レーダ干渉回避方法。
【図1】


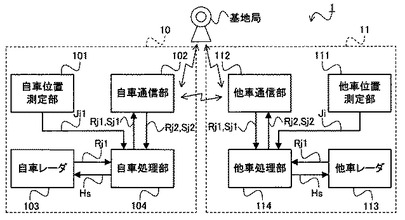
【図2】
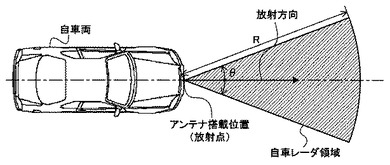
【図3】
【図4】
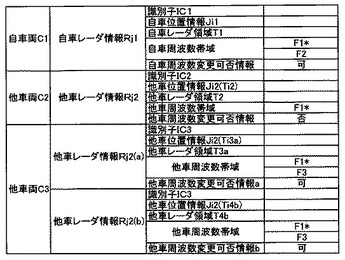
【図5】
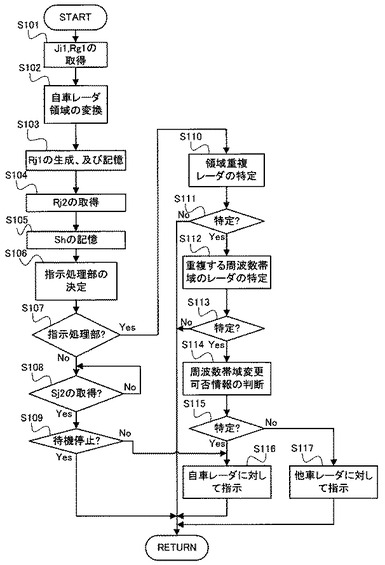
【図6】
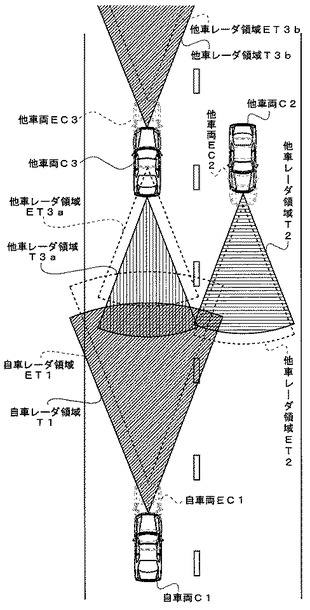
【図7】
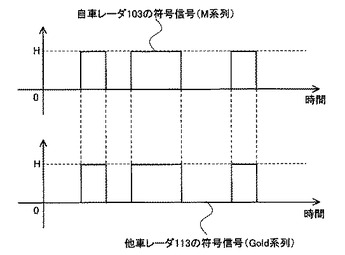
【図8】
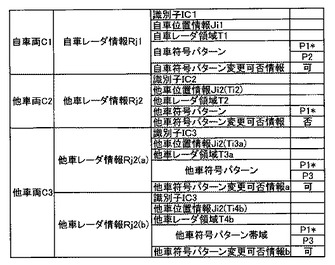
【図9】
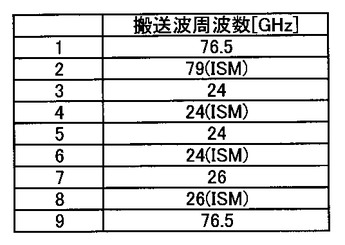
【図10】
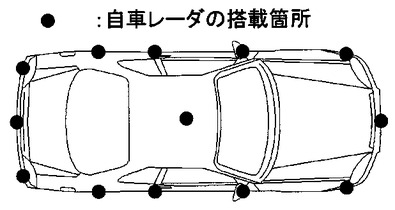
【図11】
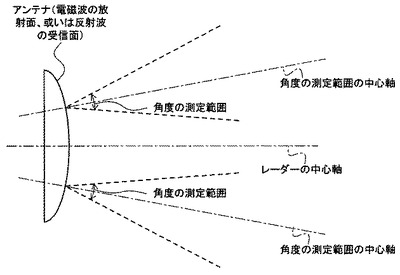
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−48716(P2010−48716A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−214436(P2008−214436)
【出願日】平成20年8月22日(2008.8.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年8月22日(2008.8.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]