
レーダ画像処理装置及びレーダ画像処理方法
【課題】地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得してレーダ画像保持部12に格納し、位置合わせ処理部14が、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測対象である地表の状態を表す複数の特性値を算出する。変化候補域抽出部34は、上記特性値毎に変化候補域を抽出し、判別法決定部24が決定した閾値、抽出条件及び判別関数を使用して、判別部36が上記変化候補域から観測対象の変化域を抽出する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得してレーダ画像保持部12に格納し、位置合わせ処理部14が、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測対象である地表の状態を表す複数の特性値を算出する。変化候補域抽出部34は、上記特性値毎に変化候補域を抽出し、判別法決定部24が決定した閾値、抽出条件及び判別関数を使用して、判別部36が上記変化候補域から観測対象の変化域を抽出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、異なる時刻に人エ衛星や航空機等の飛翔体に搭載したレーダ装置により取得された時系列画像データから観測対象の変化域を抽出するレーダ画像処理装置及びレーダ画像処理方法に関する。
【背景技術】
【0002】
従来より、地表面の一部を観測対象として、その変化を観測する技術が実用化されている。例えば、光学画像データを使用して地物の変化抽出を行う手法があるが、この方法は天侯に左右されるので、実用的ではないという問題がある。
【0003】
このため、合成開ロレーダ(SAR)等を使用して地表面の変化を観測する技術が提案されている。SARは人工衛星等から照射したマイクロ波パルスの地表面での反射を測定する能動型センサであり、昼夜、天侯に関係なく観測することができる。例えば、下記特許文献1には、異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像データの相関値から変化を検出する技術が開示されている。また、下記非特許文献1には、レーダ画像データの後方散乱強度の時間変化から地表面の変化域を抽出する技術が開示されている。
【特許文献1】特開2006−3302号公報
【非特許文献1】「時系列SARを画像を用いた土地被覆変化個所の早期検出法に関する研究」 臼田裕一郎他 写真測量とリモートセンシング 44,6,48−57.2005
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1では、異なる時刻で取得された2枚のレーダ画像の相関を示すコヒーレンスを算出し、このコヒーレンスが2枚のレーダ画像が完全に一致する場合は1となり、2枚のレーダ画像間の差異が大きくなるとともに0に近づくことを利用して、コヒーレンスの大小に基づく閾値処理によって、2枚のレーダ画像が取得された異なる時刻の間に生じた観測対象の時間的変化の検出を行っている。しかし、植生域は季節変化により、コヒーレンスが低下する。また、SARの軌道間距離が大きいと画優全体でコヒーレンスが低下するなどの間題点があった。
【0005】
一方、非特許文献1では、SARから得られる地表の凹凸や誘電率に依存する後方散乱強度を取得して、異なる時刻の差分を算出して所定閾値以上の画素を変化域として抽出する。しかし、表面が変化していなくても土壌の水分量の変化により散乱強度が変化することや、建物では徴妙な入射角の違いなどで散乱強度が大きく変化するなどの問題点があった。
【0006】
このような事情により、コヒーレンス、または散乱強度の一方のみでは、撮影時期、天侯、入射角や観測対象の土地被覆などの違いなどの影響により、地表面の変化の有無を正確に抽出することは困難であった。
【0007】
また、高解像度のSARデータを用いて、土地被覆などの変化域を抽出する場合には、あまり小さい変化域まで取り出そうと試みると過剰抽出箇所が大きくなる。例えば、自動車などの移動体を過剰抽出してしまう可能性がある。
【0008】
さらに、マイクロ波の地物からの散乱メカニズムが非常に複雑であり、かつ画像にはごま塩状のスペックルノイズがあることから、閾値のみで変化したかどうかの可否を判断すると、多くのノイズを誤差として取り出してしまう可能性がある。
【0009】
本発明は、上記従来の課題に鑑みなされたものであり、その目的は、地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、レーダ画像処理装置であって、異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出する特性値算出手段と、前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定する判別法決定手段と、前記決定された判別法により前記観測対象の変化域を抽出する変化域抽出手段と、を備えることを特徴とする。
【0011】
また、上記レーダ画像処理装置において、前記特性値算出手段は、前記観測対象の時系列画像データの各々について散乱強度を算出する散乱強度算出手段と、相関を示す指標を算出する相関指標算出手段と、を含むことを特徴とする。
【0012】
また、上記レーダ画像処理装置において、前記特性値算出手段は、さらに地表面の高さ情報を算出する高さ算出手段を含むのが好適である。
【0013】
また、上記レーダ画像処理装置において、前記特性値算出手段は、さらに所定範囲内における前記散乱強度の標準偏差を算出する標準偏差算出手段を含むことを特徴とする。
【0014】
また、上記レーダ画像処理装置において、前記判別法決定手段は、前記観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得するのが好適である。
【0015】
また、上記レーダ画像処理装置において、前記判別法決定手段は、前記変化域抽出手段が前記観測対象の変化域を抽出する処理に使用する閾値、抽出条件、判別関数の少なくとも1つを選択するのが好適である。
【0016】
また、上記レーダ画像処理装置において、前記観測対象の時系列画像データは、合成開ロレーダにより取得されたものであるのが好適である。
【0017】
また、本発明は、レーダ画像処理方法であって、異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出するステップと、前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定するステップと、前記決定された判別法により前記観測対象の変化域を抽出するステップと、を備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、予め把握する地物の大きさに応じて変化域を抽出するための閾値や抽出条件を設定することができるので、目的に応じて必要とする変化域を抽出することができる。
【0019】
また、本発明によれば、複数の特性値を使用して観測対象の変化を抽出するので、地表面の変化をより正確に抽出することができる。
【0020】
更に、観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得して変化の判別方法を決定することにより、さらに正確な地表面の変化の抽出が可能となる。
【発明を実施するための最良の形態】
【0021】
以下、本発明を実施するための最良の形態(以下、実施形態という)を、図面に従って説明する。
【0022】
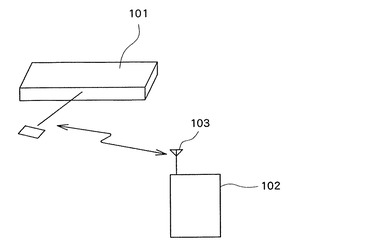
図1には、本発明にかかるレーダ画像処理装置を使用した観測対象の変化域抽出システムの一実施形態の構成例が示される。図1において、人工衛星101に搭載された合成開口レーダ等のレーダ装置により、地表面の所望範囲である観測対象のレーダ画像データを取得し、このレーダ画像データを本実施形態のレーダ画像処理装置102に送信する。レーダ画像処理装置102では、アンテナ103を介して受信したレーダ画像データを処理して観測対象である地表面(土地被覆)の変化を解析する。この場合のレーダ画像データは、異なる時刻にレーダ装置により取得された時系列画像データとなっている。また、レーダ画像処理装置102は、例えばコンピュータ上で所定のプログラムを動作させることにより実現することができる。
【0023】
なお、上記人工衛星101の数は1基に限らず、同一の撮影仕様である複数の人工衛星であってもよい。この場合には、複数の人工衛星101に搭載されたレーダ装置により、後述するようにインターフェロメトリ処理により精度良く高さ情報を得ることができる。また、上記レーダ装置は、人工衛星101の他、航空機に搭載してもよい。
【0024】
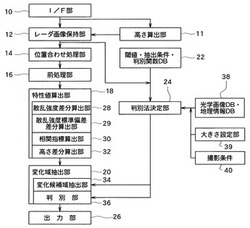
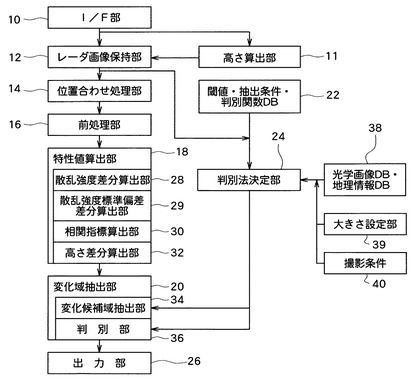
図2には、本実施形態にかかるレーダ画像処理装置102の構成例の機能ブロック図が示される。図2において、レーダ画像処理装置102は、通信インターフェース部10、高さ算出部11、レーダ画像保持部12、位置合わせ処理部14、前処理部16、特性値算出部18、変化域抽出部20、閾値・抽出条件・判別関数データベース部22、判別法決定部24及び出力部26を含んで構成されている。
【0025】
通信インターフェース部10は、適宜な通信インターフェースにより構成され、上記人工衛星101等と通信して異なる時刻に取得されて時系列画像データとなっているレーダ画像データ及び撮影条件の一部である撮影日時や撮影位置情報、及び撮影時の入射角データを受信する。
【0026】
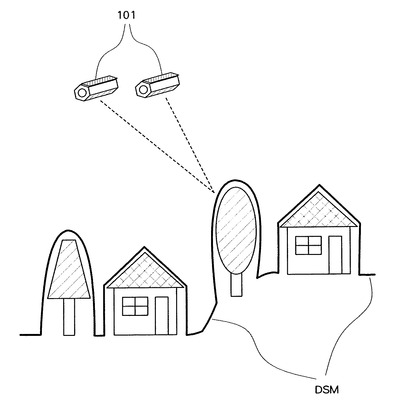
高さ算出部11は、同時に撮影された2枚の画像を干渉させて、高さ情報を算出する。ここで高さ情報とは、建物や樹木等を含む地表面の標高、勾配等を数値的に表現した数値表層モデル(DSM)を含む。例えば高さ情報は、異なる軌道上で取得された散乱強度からレーダグラメトリ(radargrammetry)処理により求めたり、あるいは同一軌道上で異なる時刻に撮影された2つの画像を干渉させるリピートパス(Repeat Pass)インターフェロメトリ処理、同一軌道上で複数アンテナにより同時に撮影された2つの画像を干渉させるシングルパス(Single Pass)インターフェロメトリ処理により求めることが出来る。
【0027】
図3には、DSMの測定例が示される。図3において、建物や樹木等を含む地表面の標高、勾配等がDSMとして示される。近年の衛星SARでは、高解像度で高精度の高さ情報を得ることができるので、特性値の1つとしてDSMを利用することができる。
【0028】
レーダ画像保持部12は、磁気記憶装置等に形成され、通信インターフェース部10が受信したレーダ画像データ、高さ算出部11で算出した高さデータ、及び撮影条件の一部である撮影日時や撮影位置情報、及び撮影時の入射角データを保持する。
【0029】
位置合わせ処理部14は、異なる時刻に取得された同一観測対象の複数のレーダ画像データを上記レーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。この位置合わせは、後述する特性値算出処理において、各レーダ画像データの対応する画素を一致させる必要があるために実施される。
【0030】
前処理部16は、上記レーダ画像データに含まれるノイズを除去するためのフィルタリング処理を行う。ここで、高解像度SARデータを用いる場合には、観測対象の土地被覆、スケール(規模)によって、画素サイズを変更してもよい(リサンプリング処理)。このフィルタリング処理には、例えば平均化処理等を使用することができ、ハードウエア、ソフトウエアのいずれで実現してもよい。
【0031】
特性値算出部18は、中央処理装置(CPU)と動作プログラムにより実現され、観測対象である地表の状態を表す複数の特性値を算出する。この特性値には、例えば散乱強度、散乱強度の標準偏差、相関を示す指標及び地表面の高さ情報等が含まれる。このため、特性値算出部18には、散乱強度差分算出部28、適当な画素領域内における散乱強度の標準偏差を算出する散乱強度標準偏差差分算出部29、相関指標算出部30及び高さ差分算出部32が含まれる。また、多周波、多偏波画像が得られる場合には、各画像毎に上記特性値を求めても良い。この場合には、レーダ画像保持部12は、通信インターフェース部10より偏波情報を受信し、これを保持する。
【0032】
ここで、散乱強度差分算出部28は、異なる時刻に取得された同一観測対象の複数(例えば2つ)のレーダ画像データの後方散乱強度を各画素毎に算出し、上記複数のレーダ画像データ間で差分を求める。散乱強度標準偏差差分算出部29は、各画素について適当な周辺画素領域内における散乱強度の標準偏差を算出し、上記複数のレーダ画像データ間で差分を求める。ここで周辺画素領域の大きさは、例えば検出対象地物の大きさや地物の密集度などにより決定する。大き過ぎると抽出漏れが生じ、逆に小さ過ぎると過剰に抽出するので、対象地物の大きさに応じて適宜決定する必要がある。また、散乱強度の標準偏差差分を用いることは、散乱強度のばらつき具合の変化を元に土地被覆の変化を抽出するので、特に、都市部の建造物等に比べて散乱強度の空間変動が大きい可能性が高い土地利用領域(例えば植生域等)に有効である。
【0033】
また、相関指標算出部30は、上記複数のレーダ画像データ間の画像の相関を示す指標(例えば散乱強度の相関係数やコヒーレンスなど)を算出する。例えば各画素の散乱強度の相関係数を算出する際は、その画素を中心に適当な周辺画素領域内の相関係数を算出する。ここで周辺画素領域の大きさは、上述した散乱強度の標準偏差を求める場合と同様に、例えば検出対象地物の大きさや地物の密集度などにより決定する。また、高さ差分算出部32は、上記複数のレーダ画像データについて地表面の高さ情報を算出し、これらの差分を求める。
【0034】
変化域抽出部20は、中央処理装置(CPU)と動作プログラムにより実現され、特性値算出部18が算出した特性値を使用して観測対象である地表の状態が時間の経過とともに変化した変化域を抽出する。この変化域抽出部20は、変化候補域抽出部34及び判別部36を含んで構成されている。
【0035】
ここで、変化候補域抽出部34は、特性値算出部18が算出した複数の特性値、例えば散乱強度の差分、散乱強度の適当な周辺画素領域内の標準偏差の差分、相関指標及び高さ情報の差分毎に変化域の候補を抽出する。この抽出処理は、各特性値毎に閾値及び抽出条件を設定して行う。上記閾値の設定は、例えば土地被覆や文献値に基づき決定した値を設定する、予め観測対象の複数の画像でノイズの大きさを評価しておき、それを考慮して設定する、あるいは変化域の割合をおおまかに推定し、統計的に決定した値を設定する等により行う。上記閾値及び抽出条件を用いて、変化候補域を決定する。例えば、散乱強度や散乱強度標準偏差といった特性値の差分が閾値を超えた画素をポリゴンで囲んだときに、ある面積以上のものを取り出すという抽出条件を設定して、変化候補領域として取り出す。これによってSARのノイズの誤抽出を軽減することができる。このように、閾値と抽出条件とは相互に組み合わせることにより変化候補領域の抽出精度を調整することが可能であり、例えば閾値で多めに変化候補域を抽出しておき、抽出条件によって絞り込むなどの方法がある。また、散乱強度や散乱強度標準偏差といった特性値の差分以外に、相関指標が所定の閾値以下の場合、あるいは高さ情報の差分が所定の閾値を超えた場合に変化候補域として決定してもよい。なお、上記閾値及び抽出条件は、後述する判別法決定部24が決定してもよいし、管理者が設定してもよい。
【0036】
また、判別部36は、上記各特性値毎に抽出された各変化候補域に基づき、観測対象である地表の変化を判別して変化域の抽出を行う。この判別に使用する判別関数は、後述する判別法決定部24が決定して判別部36にわたす。判別関数は、例えば散乱強度の差分、散乱強度の適当なサイズ内の標準偏差の差分、相関を示す指標及び高さ情報の差分の各特性値毎に重み付きの配点等を行って各画素毎に合計点を算出し、この合計点が所定の閾値を超えたときに変化域と判別する等の構成とすることができる。
【0037】
閾値・抽出条件・判別関数データベース部22は、磁気記憶装置等に形成され、上記閾値、抽出条件及び判別関数を格納する。
【0038】
判別法決定部24は、CPUと動作プログラムにより実現され、外部の光学画像データベース・地理情報データベース38から観測対象である地域の形態に関する情報を取得する。また、把握地物の大きさ設定部39により、予め変化域として抽出する観測対象の大きさを設定しておく。この設定値により、変化のあった画素域における画素数や形状に応じて、例えば自動車を変化域として抽出するか否か等を決定することができる。これらと、撮影日時及び撮影時の入射角データ以外の予め記憶している撮影条件(波長、画素サイズなど)の少なくとも1つに応じて上記閾値、抽出条件及び判別関数の少なくとも1つを閾値・抽出条件・判別関数データベース部22から取得する。上記形態は、例えば観測対象である地域が都市部であるか山間部であるか田園地帯であるか等の情報である。これらの形態の相違によりどの特性値をどの程度重く評価すべきかを決定することができるので、適切な閾値、抽出条件及び判別関数を選択することができる。また、異なる季節では相関を示す指標の相関値が低下し、雨季には水分量の影響を受けること等を考慮し、撮影時期に応じて適切な閾値、抽出条件及び判別関数を選択する。あるいは、都市部では撮影位置や撮影時の入射角によって建物での多重散乱が変化するので、この点も考慮する。判別法決定部24は、閾値・抽出条件・判別関数データベース部22から取得した閾値及び抽出条件を上記変化候補域抽出部34に渡し、判別関数を上記判別部36に渡す。
【0039】
出力部26は、上記変化域抽出部20が抽出した変化域を画像データ等として出力する。出力方法としては、プリントアウト、画面表示等を採用することができる。
【0040】
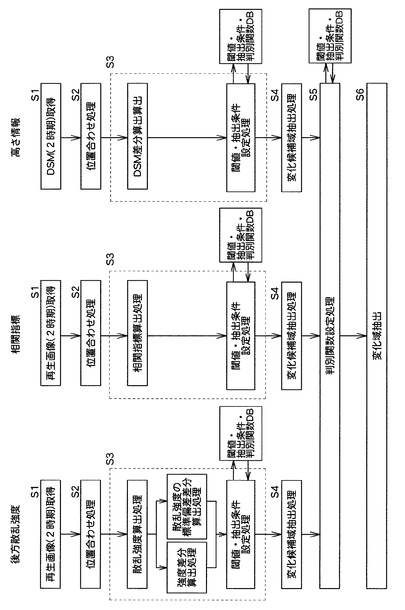
図4には、本実施形態にかかるレーダ画像処理装置102の動作例のフローが示される。なお、図4では、特性値として後方散乱強度、相関指標及び高さ情報(DSM)を用いる場合の例が示されている。図4において、通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データ(再生画像)を取得してレーダ画像保持部12に格納する(S1)。なお、高さ情報は、同一の撮影仕様である複数の人工衛星101に搭載されたレーダ装置を用いたインターフェロメトリ処理により精度良く高さ情報を得ることができる。この場合には、後方散乱強度や相関指標を用いた場合のように画像として再構成されたデータ(再生画像)である必要はなく、所定座標における高さ情報(DSM)をそのまま格納してもよい。位置合わせ処理部14は、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする(S2)。
【0041】
位置合わせ後のレーダ画像データは、前処理部16がフィルタリング処理によりノイズ除去をした後、リサンプリング処理により適当な画素サイズに変更する。次に特性値算出部18が観測対象である地表の状態を表す複数の特性値を算出する(S3)。この特性値の算出は、上述した散乱強度差分算出部28、適当な周辺画素領域内の散乱強度標準偏差差分算出部29、相関指標算出部30及び高さ差分算出部32が、それぞれ散乱強度の差分、散乱強度の適当な周辺画素領域内の標準偏差の差分、相関係数やコヒーレンス等の相関指標及びDSMの差分を算出することにより行う。なお、この際に、判別法決定部24は、閾値・抽出条件・判別関数データベース部22から上記それぞれの特性値毎の閾値と抽出条件を取得しておく。
【0042】
変化域抽出部20の変化候補域抽出部34は、上記特性値毎に、判別法決定部24が閾値・抽出条件・判別関数データベース部22から取得した閾値と抽出条件を用いて変化候補域を抽出する(S4)。また、判別法決定部24は、光学画像データベース・地理情報データベース38から取得した観測対象である地域の形態に関する情報や撮影条件に基づいて判別関数を決定する(S5)。変化域抽出部20の判別部36は、この判別関数を使用して、変化候補域から観測対象の変化域を抽出する(S6)。
【図面の簡単な説明】
【0043】
【図1】本発明にかかるレーダ画像処理装置を使用した観測対象の変化域抽出システムの構成例を示す図である。
【図2】本発明にかかるレーダ画像処理装置の構成例の機能ブロック図である。
【図3】DSMの測定例を示す図である。
【図4】本発明にかかるレーダ画像処理装置の動作例のフロー図である。
【符号の説明】
【0044】
10 通信インターフェース部、11 高さ算出部、12 レーダ画像保持部、14 位置合わせ処理部、16 前処理部、18 特性値算出部、20 変化域抽出部、22 閾値・抽出条件・判別関数データベース部、24 判別法決定部、26 出力部、28 散乱強度差分算出部、29 散乱強度標準偏差差分算出部、30 相関指標算出部、32 高さ差分算出部、34 変化候補域抽出部、36 判別部、38 光学画像データベース・地理情報データベース、39 大きさ設定部、40 撮影条件、101 人工衛星、102 レーダ画像処理装置、103 アンテナ。
【技術分野】
【0001】
本発明は、異なる時刻に人エ衛星や航空機等の飛翔体に搭載したレーダ装置により取得された時系列画像データから観測対象の変化域を抽出するレーダ画像処理装置及びレーダ画像処理方法に関する。
【背景技術】
【0002】
従来より、地表面の一部を観測対象として、その変化を観測する技術が実用化されている。例えば、光学画像データを使用して地物の変化抽出を行う手法があるが、この方法は天侯に左右されるので、実用的ではないという問題がある。
【0003】
このため、合成開ロレーダ(SAR)等を使用して地表面の変化を観測する技術が提案されている。SARは人工衛星等から照射したマイクロ波パルスの地表面での反射を測定する能動型センサであり、昼夜、天侯に関係なく観測することができる。例えば、下記特許文献1には、異なる時刻にレーダ装置により取得された観測対象の2つのレーダ画像データの相関値から変化を検出する技術が開示されている。また、下記非特許文献1には、レーダ画像データの後方散乱強度の時間変化から地表面の変化域を抽出する技術が開示されている。
【特許文献1】特開2006−3302号公報
【非特許文献1】「時系列SARを画像を用いた土地被覆変化個所の早期検出法に関する研究」 臼田裕一郎他 写真測量とリモートセンシング 44,6,48−57.2005
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1では、異なる時刻で取得された2枚のレーダ画像の相関を示すコヒーレンスを算出し、このコヒーレンスが2枚のレーダ画像が完全に一致する場合は1となり、2枚のレーダ画像間の差異が大きくなるとともに0に近づくことを利用して、コヒーレンスの大小に基づく閾値処理によって、2枚のレーダ画像が取得された異なる時刻の間に生じた観測対象の時間的変化の検出を行っている。しかし、植生域は季節変化により、コヒーレンスが低下する。また、SARの軌道間距離が大きいと画優全体でコヒーレンスが低下するなどの間題点があった。
【0005】
一方、非特許文献1では、SARから得られる地表の凹凸や誘電率に依存する後方散乱強度を取得して、異なる時刻の差分を算出して所定閾値以上の画素を変化域として抽出する。しかし、表面が変化していなくても土壌の水分量の変化により散乱強度が変化することや、建物では徴妙な入射角の違いなどで散乱強度が大きく変化するなどの問題点があった。
【0006】
このような事情により、コヒーレンス、または散乱強度の一方のみでは、撮影時期、天侯、入射角や観測対象の土地被覆などの違いなどの影響により、地表面の変化の有無を正確に抽出することは困難であった。
【0007】
また、高解像度のSARデータを用いて、土地被覆などの変化域を抽出する場合には、あまり小さい変化域まで取り出そうと試みると過剰抽出箇所が大きくなる。例えば、自動車などの移動体を過剰抽出してしまう可能性がある。
【0008】
さらに、マイクロ波の地物からの散乱メカニズムが非常に複雑であり、かつ画像にはごま塩状のスペックルノイズがあることから、閾値のみで変化したかどうかの可否を判断すると、多くのノイズを誤差として取り出してしまう可能性がある。
【0009】
本発明は、上記従来の課題に鑑みなされたものであり、その目的は、地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、レーダ画像処理装置であって、異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出する特性値算出手段と、前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定する判別法決定手段と、前記決定された判別法により前記観測対象の変化域を抽出する変化域抽出手段と、を備えることを特徴とする。
【0011】
また、上記レーダ画像処理装置において、前記特性値算出手段は、前記観測対象の時系列画像データの各々について散乱強度を算出する散乱強度算出手段と、相関を示す指標を算出する相関指標算出手段と、を含むことを特徴とする。
【0012】
また、上記レーダ画像処理装置において、前記特性値算出手段は、さらに地表面の高さ情報を算出する高さ算出手段を含むのが好適である。
【0013】
また、上記レーダ画像処理装置において、前記特性値算出手段は、さらに所定範囲内における前記散乱強度の標準偏差を算出する標準偏差算出手段を含むことを特徴とする。
【0014】
また、上記レーダ画像処理装置において、前記判別法決定手段は、前記観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得するのが好適である。
【0015】
また、上記レーダ画像処理装置において、前記判別法決定手段は、前記変化域抽出手段が前記観測対象の変化域を抽出する処理に使用する閾値、抽出条件、判別関数の少なくとも1つを選択するのが好適である。
【0016】
また、上記レーダ画像処理装置において、前記観測対象の時系列画像データは、合成開ロレーダにより取得されたものであるのが好適である。
【0017】
また、本発明は、レーダ画像処理方法であって、異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出するステップと、前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定するステップと、前記決定された判別法により前記観測対象の変化域を抽出するステップと、を備えることを特徴とする。
【発明の効果】
【0018】
本発明によれば、予め把握する地物の大きさに応じて変化域を抽出するための閾値や抽出条件を設定することができるので、目的に応じて必要とする変化域を抽出することができる。
【0019】
また、本発明によれば、複数の特性値を使用して観測対象の変化を抽出するので、地表面の変化をより正確に抽出することができる。
【0020】
更に、観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得して変化の判別方法を決定することにより、さらに正確な地表面の変化の抽出が可能となる。
【発明を実施するための最良の形態】
【0021】
以下、本発明を実施するための最良の形態(以下、実施形態という)を、図面に従って説明する。
【0022】
図1には、本発明にかかるレーダ画像処理装置を使用した観測対象の変化域抽出システムの一実施形態の構成例が示される。図1において、人工衛星101に搭載された合成開口レーダ等のレーダ装置により、地表面の所望範囲である観測対象のレーダ画像データを取得し、このレーダ画像データを本実施形態のレーダ画像処理装置102に送信する。レーダ画像処理装置102では、アンテナ103を介して受信したレーダ画像データを処理して観測対象である地表面(土地被覆)の変化を解析する。この場合のレーダ画像データは、異なる時刻にレーダ装置により取得された時系列画像データとなっている。また、レーダ画像処理装置102は、例えばコンピュータ上で所定のプログラムを動作させることにより実現することができる。
【0023】
なお、上記人工衛星101の数は1基に限らず、同一の撮影仕様である複数の人工衛星であってもよい。この場合には、複数の人工衛星101に搭載されたレーダ装置により、後述するようにインターフェロメトリ処理により精度良く高さ情報を得ることができる。また、上記レーダ装置は、人工衛星101の他、航空機に搭載してもよい。
【0024】
図2には、本実施形態にかかるレーダ画像処理装置102の構成例の機能ブロック図が示される。図2において、レーダ画像処理装置102は、通信インターフェース部10、高さ算出部11、レーダ画像保持部12、位置合わせ処理部14、前処理部16、特性値算出部18、変化域抽出部20、閾値・抽出条件・判別関数データベース部22、判別法決定部24及び出力部26を含んで構成されている。
【0025】
通信インターフェース部10は、適宜な通信インターフェースにより構成され、上記人工衛星101等と通信して異なる時刻に取得されて時系列画像データとなっているレーダ画像データ及び撮影条件の一部である撮影日時や撮影位置情報、及び撮影時の入射角データを受信する。
【0026】
高さ算出部11は、同時に撮影された2枚の画像を干渉させて、高さ情報を算出する。ここで高さ情報とは、建物や樹木等を含む地表面の標高、勾配等を数値的に表現した数値表層モデル(DSM)を含む。例えば高さ情報は、異なる軌道上で取得された散乱強度からレーダグラメトリ(radargrammetry)処理により求めたり、あるいは同一軌道上で異なる時刻に撮影された2つの画像を干渉させるリピートパス(Repeat Pass)インターフェロメトリ処理、同一軌道上で複数アンテナにより同時に撮影された2つの画像を干渉させるシングルパス(Single Pass)インターフェロメトリ処理により求めることが出来る。
【0027】
図3には、DSMの測定例が示される。図3において、建物や樹木等を含む地表面の標高、勾配等がDSMとして示される。近年の衛星SARでは、高解像度で高精度の高さ情報を得ることができるので、特性値の1つとしてDSMを利用することができる。
【0028】
レーダ画像保持部12は、磁気記憶装置等に形成され、通信インターフェース部10が受信したレーダ画像データ、高さ算出部11で算出した高さデータ、及び撮影条件の一部である撮影日時や撮影位置情報、及び撮影時の入射角データを保持する。
【0029】
位置合わせ処理部14は、異なる時刻に取得された同一観測対象の複数のレーダ画像データを上記レーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。この位置合わせは、後述する特性値算出処理において、各レーダ画像データの対応する画素を一致させる必要があるために実施される。
【0030】
前処理部16は、上記レーダ画像データに含まれるノイズを除去するためのフィルタリング処理を行う。ここで、高解像度SARデータを用いる場合には、観測対象の土地被覆、スケール(規模)によって、画素サイズを変更してもよい(リサンプリング処理)。このフィルタリング処理には、例えば平均化処理等を使用することができ、ハードウエア、ソフトウエアのいずれで実現してもよい。
【0031】
特性値算出部18は、中央処理装置(CPU)と動作プログラムにより実現され、観測対象である地表の状態を表す複数の特性値を算出する。この特性値には、例えば散乱強度、散乱強度の標準偏差、相関を示す指標及び地表面の高さ情報等が含まれる。このため、特性値算出部18には、散乱強度差分算出部28、適当な画素領域内における散乱強度の標準偏差を算出する散乱強度標準偏差差分算出部29、相関指標算出部30及び高さ差分算出部32が含まれる。また、多周波、多偏波画像が得られる場合には、各画像毎に上記特性値を求めても良い。この場合には、レーダ画像保持部12は、通信インターフェース部10より偏波情報を受信し、これを保持する。
【0032】
ここで、散乱強度差分算出部28は、異なる時刻に取得された同一観測対象の複数(例えば2つ)のレーダ画像データの後方散乱強度を各画素毎に算出し、上記複数のレーダ画像データ間で差分を求める。散乱強度標準偏差差分算出部29は、各画素について適当な周辺画素領域内における散乱強度の標準偏差を算出し、上記複数のレーダ画像データ間で差分を求める。ここで周辺画素領域の大きさは、例えば検出対象地物の大きさや地物の密集度などにより決定する。大き過ぎると抽出漏れが生じ、逆に小さ過ぎると過剰に抽出するので、対象地物の大きさに応じて適宜決定する必要がある。また、散乱強度の標準偏差差分を用いることは、散乱強度のばらつき具合の変化を元に土地被覆の変化を抽出するので、特に、都市部の建造物等に比べて散乱強度の空間変動が大きい可能性が高い土地利用領域(例えば植生域等)に有効である。
【0033】
また、相関指標算出部30は、上記複数のレーダ画像データ間の画像の相関を示す指標(例えば散乱強度の相関係数やコヒーレンスなど)を算出する。例えば各画素の散乱強度の相関係数を算出する際は、その画素を中心に適当な周辺画素領域内の相関係数を算出する。ここで周辺画素領域の大きさは、上述した散乱強度の標準偏差を求める場合と同様に、例えば検出対象地物の大きさや地物の密集度などにより決定する。また、高さ差分算出部32は、上記複数のレーダ画像データについて地表面の高さ情報を算出し、これらの差分を求める。
【0034】
変化域抽出部20は、中央処理装置(CPU)と動作プログラムにより実現され、特性値算出部18が算出した特性値を使用して観測対象である地表の状態が時間の経過とともに変化した変化域を抽出する。この変化域抽出部20は、変化候補域抽出部34及び判別部36を含んで構成されている。
【0035】
ここで、変化候補域抽出部34は、特性値算出部18が算出した複数の特性値、例えば散乱強度の差分、散乱強度の適当な周辺画素領域内の標準偏差の差分、相関指標及び高さ情報の差分毎に変化域の候補を抽出する。この抽出処理は、各特性値毎に閾値及び抽出条件を設定して行う。上記閾値の設定は、例えば土地被覆や文献値に基づき決定した値を設定する、予め観測対象の複数の画像でノイズの大きさを評価しておき、それを考慮して設定する、あるいは変化域の割合をおおまかに推定し、統計的に決定した値を設定する等により行う。上記閾値及び抽出条件を用いて、変化候補域を決定する。例えば、散乱強度や散乱強度標準偏差といった特性値の差分が閾値を超えた画素をポリゴンで囲んだときに、ある面積以上のものを取り出すという抽出条件を設定して、変化候補領域として取り出す。これによってSARのノイズの誤抽出を軽減することができる。このように、閾値と抽出条件とは相互に組み合わせることにより変化候補領域の抽出精度を調整することが可能であり、例えば閾値で多めに変化候補域を抽出しておき、抽出条件によって絞り込むなどの方法がある。また、散乱強度や散乱強度標準偏差といった特性値の差分以外に、相関指標が所定の閾値以下の場合、あるいは高さ情報の差分が所定の閾値を超えた場合に変化候補域として決定してもよい。なお、上記閾値及び抽出条件は、後述する判別法決定部24が決定してもよいし、管理者が設定してもよい。
【0036】
また、判別部36は、上記各特性値毎に抽出された各変化候補域に基づき、観測対象である地表の変化を判別して変化域の抽出を行う。この判別に使用する判別関数は、後述する判別法決定部24が決定して判別部36にわたす。判別関数は、例えば散乱強度の差分、散乱強度の適当なサイズ内の標準偏差の差分、相関を示す指標及び高さ情報の差分の各特性値毎に重み付きの配点等を行って各画素毎に合計点を算出し、この合計点が所定の閾値を超えたときに変化域と判別する等の構成とすることができる。
【0037】
閾値・抽出条件・判別関数データベース部22は、磁気記憶装置等に形成され、上記閾値、抽出条件及び判別関数を格納する。
【0038】
判別法決定部24は、CPUと動作プログラムにより実現され、外部の光学画像データベース・地理情報データベース38から観測対象である地域の形態に関する情報を取得する。また、把握地物の大きさ設定部39により、予め変化域として抽出する観測対象の大きさを設定しておく。この設定値により、変化のあった画素域における画素数や形状に応じて、例えば自動車を変化域として抽出するか否か等を決定することができる。これらと、撮影日時及び撮影時の入射角データ以外の予め記憶している撮影条件(波長、画素サイズなど)の少なくとも1つに応じて上記閾値、抽出条件及び判別関数の少なくとも1つを閾値・抽出条件・判別関数データベース部22から取得する。上記形態は、例えば観測対象である地域が都市部であるか山間部であるか田園地帯であるか等の情報である。これらの形態の相違によりどの特性値をどの程度重く評価すべきかを決定することができるので、適切な閾値、抽出条件及び判別関数を選択することができる。また、異なる季節では相関を示す指標の相関値が低下し、雨季には水分量の影響を受けること等を考慮し、撮影時期に応じて適切な閾値、抽出条件及び判別関数を選択する。あるいは、都市部では撮影位置や撮影時の入射角によって建物での多重散乱が変化するので、この点も考慮する。判別法決定部24は、閾値・抽出条件・判別関数データベース部22から取得した閾値及び抽出条件を上記変化候補域抽出部34に渡し、判別関数を上記判別部36に渡す。
【0039】
出力部26は、上記変化域抽出部20が抽出した変化域を画像データ等として出力する。出力方法としては、プリントアウト、画面表示等を採用することができる。
【0040】
図4には、本実施形態にかかるレーダ画像処理装置102の動作例のフローが示される。なお、図4では、特性値として後方散乱強度、相関指標及び高さ情報(DSM)を用いる場合の例が示されている。図4において、通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データ(再生画像)を取得してレーダ画像保持部12に格納する(S1)。なお、高さ情報は、同一の撮影仕様である複数の人工衛星101に搭載されたレーダ装置を用いたインターフェロメトリ処理により精度良く高さ情報を得ることができる。この場合には、後方散乱強度や相関指標を用いた場合のように画像として再構成されたデータ(再生画像)である必要はなく、所定座標における高さ情報(DSM)をそのまま格納してもよい。位置合わせ処理部14は、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする(S2)。
【0041】
位置合わせ後のレーダ画像データは、前処理部16がフィルタリング処理によりノイズ除去をした後、リサンプリング処理により適当な画素サイズに変更する。次に特性値算出部18が観測対象である地表の状態を表す複数の特性値を算出する(S3)。この特性値の算出は、上述した散乱強度差分算出部28、適当な周辺画素領域内の散乱強度標準偏差差分算出部29、相関指標算出部30及び高さ差分算出部32が、それぞれ散乱強度の差分、散乱強度の適当な周辺画素領域内の標準偏差の差分、相関係数やコヒーレンス等の相関指標及びDSMの差分を算出することにより行う。なお、この際に、判別法決定部24は、閾値・抽出条件・判別関数データベース部22から上記それぞれの特性値毎の閾値と抽出条件を取得しておく。
【0042】
変化域抽出部20の変化候補域抽出部34は、上記特性値毎に、判別法決定部24が閾値・抽出条件・判別関数データベース部22から取得した閾値と抽出条件を用いて変化候補域を抽出する(S4)。また、判別法決定部24は、光学画像データベース・地理情報データベース38から取得した観測対象である地域の形態に関する情報や撮影条件に基づいて判別関数を決定する(S5)。変化域抽出部20の判別部36は、この判別関数を使用して、変化候補域から観測対象の変化域を抽出する(S6)。
【図面の簡単な説明】
【0043】
【図1】本発明にかかるレーダ画像処理装置を使用した観測対象の変化域抽出システムの構成例を示す図である。
【図2】本発明にかかるレーダ画像処理装置の構成例の機能ブロック図である。
【図3】DSMの測定例を示す図である。
【図4】本発明にかかるレーダ画像処理装置の動作例のフロー図である。
【符号の説明】
【0044】
10 通信インターフェース部、11 高さ算出部、12 レーダ画像保持部、14 位置合わせ処理部、16 前処理部、18 特性値算出部、20 変化域抽出部、22 閾値・抽出条件・判別関数データベース部、24 判別法決定部、26 出力部、28 散乱強度差分算出部、29 散乱強度標準偏差差分算出部、30 相関指標算出部、32 高さ差分算出部、34 変化候補域抽出部、36 判別部、38 光学画像データベース・地理情報データベース、39 大きさ設定部、40 撮影条件、101 人工衛星、102 レーダ画像処理装置、103 アンテナ。
【特許請求の範囲】
【請求項1】
異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出する特性値算出手段と、
前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定する判別法決定手段と、
前記決定された判別法により前記観測対象の変化域を抽出する変化域抽出手段と、
を備えることを特徴とするレーダ画像処理装置。
【請求項2】
請求項1記載のレーダ画像処理装置において、前記特性値算出手段は、前記観測対象の時系列画像データの各々について散乱強度を算出する散乱強度算出手段と、相関を示す指標を算出する相関指標算出手段と、を含むことを特徴とするレーダ画像処理装置。
【請求項3】
請求項2記載のレーダ画像処理装置において、前記特性値算出手段は、さらに地表面の高さ情報を算出する高さ算出手段を含むことを特徴とするレーダ画像処理装置。
【請求項4】
請求項2または請求項3記載のレーダ画像処理装置において、前記特性値算出手段は、さらに所定範囲内における前記散乱強度の標準偏差を算出する標準偏差算出手段を含むことを特徴とするレーダ画像処理装置。
【請求項5】
請求項1から請求項4のいずれか一項記載のレーダ画像処理装置において、前記判別法決定手段は、前記観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得することを特徴とするレーダ画像処理装置。
【請求項6】
請求項1から請求項5のいずれか一項記載のレーダ画像処理装置において、前記判別法決定手段は、前記変化域抽出手段が前記観測対象の変化域を抽出する処理に使用する閾値、抽出条件、判別関数の少なくとも1つを選択することを特徴とするレーダ画像処理装置。
【請求項7】
請求項1から請求項6のいずれか一項記載のレーダ画像処理装置において、前記観測対象の時系列画像データは、合成開ロレーダにより取得されたものであることを特徴とするレーダ画像処理装置。
【請求項8】
異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出するステップと、
前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定するステップと、
前記決定された判別法により前記観測対象の変化域を抽出するステップと、
を備えることを特徴とするレーダ画像処理方法。
【請求項1】
異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出する特性値算出手段と、
前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定する判別法決定手段と、
前記決定された判別法により前記観測対象の変化域を抽出する変化域抽出手段と、
を備えることを特徴とするレーダ画像処理装置。
【請求項2】
請求項1記載のレーダ画像処理装置において、前記特性値算出手段は、前記観測対象の時系列画像データの各々について散乱強度を算出する散乱強度算出手段と、相関を示す指標を算出する相関指標算出手段と、を含むことを特徴とするレーダ画像処理装置。
【請求項3】
請求項2記載のレーダ画像処理装置において、前記特性値算出手段は、さらに地表面の高さ情報を算出する高さ算出手段を含むことを特徴とするレーダ画像処理装置。
【請求項4】
請求項2または請求項3記載のレーダ画像処理装置において、前記特性値算出手段は、さらに所定範囲内における前記散乱強度の標準偏差を算出する標準偏差算出手段を含むことを特徴とするレーダ画像処理装置。
【請求項5】
請求項1から請求項4のいずれか一項記載のレーダ画像処理装置において、前記判別法決定手段は、前記観測対象の形態に関する情報を地理情報データベースまたは光学画像データベースから取得することを特徴とするレーダ画像処理装置。
【請求項6】
請求項1から請求項5のいずれか一項記載のレーダ画像処理装置において、前記判別法決定手段は、前記変化域抽出手段が前記観測対象の変化域を抽出する処理に使用する閾値、抽出条件、判別関数の少なくとも1つを選択することを特徴とするレーダ画像処理装置。
【請求項7】
請求項1から請求項6のいずれか一項記載のレーダ画像処理装置において、前記観測対象の時系列画像データは、合成開ロレーダにより取得されたものであることを特徴とするレーダ画像処理装置。
【請求項8】
異なる時刻にレーダ装置により取得された観測対象の時系列画像データから複数の特性値を算出するステップと、
前記観測対象の形態、大きさ、撮影条件の少なくとも1つに応じて前記複数の特性値を使用した観測対象の変化の判別法を決定するステップと、
前記決定された判別法により前記観測対象の変化域を抽出するステップと、
を備えることを特徴とするレーダ画像処理方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−46107(P2008−46107A)
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願番号】特願2007−122281(P2007−122281)
【出願日】平成19年5月7日(2007.5.7)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願日】平成19年5月7日(2007.5.7)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]