
レーダ画像処理装置
【課題】参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償できるレーダ画像処理装置を得る。
【解決手段】レーダ波の波長を格納する観測パラメータ格納部1と、レーダ観測により得られた受信信号を格納する受信データ格納部2と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部3と、前記プラットフォームの軌道情報から直線状の参照軌道として設定し、受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、合成開口中の各パルス送受信位置で、実軌道上のアンテナ位置と前記基準点の第1の距離、及び前記参照軌道上のアンテナ位置と前記基準点との第2の距離を、前記プラットフォームの移動を考慮しながら求め、第1及び第2の距離の差分である距離変化を算出し、前記波長と距離変化に基づき前記受信信号を補償する動揺補償部20とを設けた。
【解決手段】レーダ波の波長を格納する観測パラメータ格納部1と、レーダ観測により得られた受信信号を格納する受信データ格納部2と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部3と、前記プラットフォームの軌道情報から直線状の参照軌道として設定し、受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、合成開口中の各パルス送受信位置で、実軌道上のアンテナ位置と前記基準点の第1の距離、及び前記参照軌道上のアンテナ位置と前記基準点との第2の距離を、前記プラットフォームの移動を考慮しながら求め、第1及び第2の距離の差分である距離変化を算出し、前記波長と距離変化に基づき前記受信信号を補償する動揺補償部20とを設けた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生するレーダ画像処理装置に関するものである。
【背景技術】
【0002】
レーダ観測の走査方法の中で最も一般的な方法として、ストリップモードがある。この走査方法は、固定したアンテナからビームを照射し、プラットフォームの動きに沿って細長く走査する方法である。ここでプラットフォームとは、レーダを搭載した航空機等の移動体を示す。同走査方法で取得した受信信号からレーダ画像を再生する画像再生処理では、アンテナの軌道は直線であるとして処理を行う。以降、この画像再生処理に用いるアンテナの軌道を参照軌道と呼ぶ。しかし、実際には、アンテナの軌道は観測時の風等の影響により直線ではない。このため、実際の軌道と参照軌道との差に応じて受信信号を補償する動揺補償処理が必要になる。
【0003】
同走査方法で得た受信信号に対して画像再生処理を行うための、従来のレーダ画像処理装置では、実際の軌道と参照軌道との差を、参照軌道と直行する方向で算出し、その差に基づいて受信信号を補償していた(例えば、非特許文献1参照)。
【0004】
この補償処理を、図9に示すレーダ観測の幾何を用いて説明する。図9において、実軌道71は実際のアンテナの軌道を示し、参照軌道72は画像再生で用いられる直線のアンテナ軌道である。また、スワスの中央74は、ビームの観測幅(スワス幅)の中央を示し、補償の基準点73は実軌道71と参照軌道72との差を算出する際に基準となる点を示す。
【0005】
従来のレーダ画像処理装置では、パルスの送受信位置毎に、参照軌道72に直行する面内で、かつ、観測領域のスワス中心上にある点を、補償の基準点73として設定する。そして、基準点73に対する実際の軌道71の距離と参照軌道72の距離の差を求め、この距離差に基づいて、その基準点73と同じ面内にあるパルス送受信位置で得られた受信信号の補償を行う。また、参照軌道72を区分的な直線状の線分として設定し、その参照軌道72と実軌道71の基準点に対する距離の差を算出して受信信号を補償する方法も提案されている(例えば、非特許文献2参照)。
【0006】
【非特許文献1】W.G.Carrara, R.S.Goodman, R.M.Majewski, Spotlight Synthetic Aperture Radar signal processing algorithms, Artech House, 1995, p.67.
【非特許文献2】S.N.Madsen, H.A.Zebker, J.Martin, “Topographic Mapping Using Radar Interferometry: processing techniques,” IEEE Transactions on Geoscience and remote sensing, vol.31, no.1, January 1993.
【発明の開示】
【発明が解決しようとする課題】
【0007】
レーダ画像処理装置では、プラットフォームの移動により生じる、地表面上の点とアンテナとの距離変化を利用し、受信信号のアジマス方向での圧縮を行い、その地点での結像を得る。従って、動揺補償処理において、地表面上の点に対する実軌道と参照軌道との距離の差は、本来、プラットフォームの移動に応じた距離の変化を考慮して算出する必要がある。このプラットフォームの移動に伴う距離の差の変化は、アジマスビーム幅が大きい高分解能なレーダ程、合成開口に要するプラットフォームの移動距離が長いため大きくなる。また、その変化の仕方は、観測対象領域上にある点の位置に応じて異なる。従来のレーダ画像処理装置は、このプラットフォームの移動や散乱点の位置に応じた距離変化を考慮せず、参照軌道に直行する面内での距離差を補償量として補償していたため、その補償量が誤差をもち、再生された画像の分解能が劣化するという問題点があった。この問題点は、特にアジマス方向で高分解能、広い観測幅をもつシステムで大きくなる。また、参照信号を区分的な線分として設定し、実軌道と参照軌道との差を小さくすることで補償の誤差を小さくする方法においても、線分の端では補償誤差が大きく、かつ、その誤差が接続部で不連続になるため、再生後の画像に不連続部分が生じるという問題点があった。これら従来方法での補償の誤差は、異なる位置に設置した2つのアンテナで観測した、2枚の再生後の画像の位相差に基づき地表面の3次元形状を測定する場合には、大きな測定誤差を生じさせるという問題点があった。
【0008】
この発明は、上述のような課題を解決するためになされたもので、その目的は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生することができるレーダ画像処理装置を得るものである。
【課題を解決するための手段】
【0009】
この発明に係るレーダ画像処理装置は、観測パラメータとして少なくともレーダ波の波長を格納する観測パラメータ格納部と、レーダ観測により得られた受信信号を格納する受信データ格納部と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部と、前記軌道情報格納部に格納された前記プラットフォームの軌道情報から、直線状の軌道を求めて参照軌道として設定し、前記受信データ格納部に格納された受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、アンテナ位置を中心とした合成開口を定め、前記合成開口中における各パルス送受信位置において、実軌道上のアンテナ位置と前記補償の基準点との第1の距離、及び前記参照軌道上のアンテナ位置と前記補償の基準点との第2の距離を、前記プラットフォームの移動を考慮しながらそれぞれ求め、前記プラットフォームの動揺による、前記第1及び第2の距離の差分である距離変化を算出し、前記波長及び距離変化に基づいて前記受信信号を補償する動揺補償部とを設けたものである。
【発明の効果】
【0010】
この発明に係るレーダ画像処理装置は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生することができるという効果を奏する。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
この発明の実施の形態1に係るレーダ画像処理装置について図1から図3までを参照しながら説明する。図1は、この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0012】
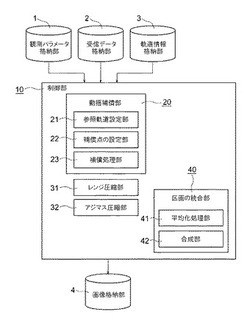
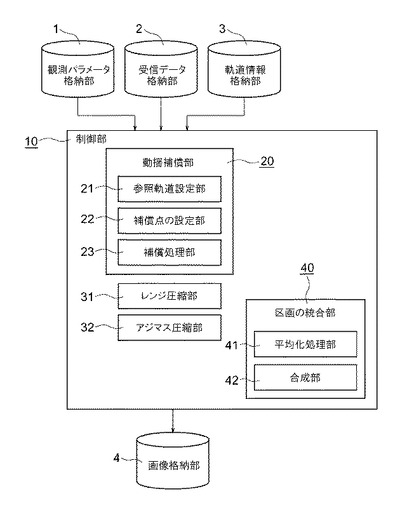
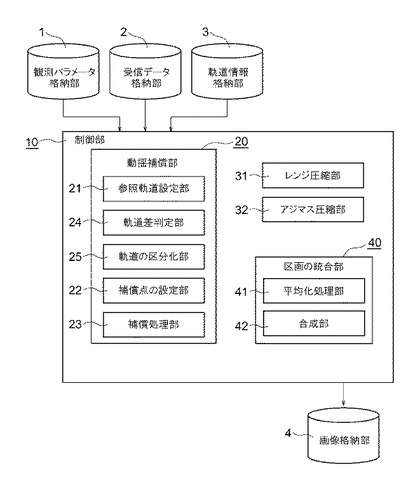
図1において、この実施の形態1に係るレーダ画像処理装置は、観測パラメータ格納部1と、受信データ格納部2と、軌道情報格納部3と、画像格納部4と、制御部10とが設けられている。
【0013】
観測パラメータ格納部1は、レーダ波の波長や、周波数、偏波、レンジゲート設定距離などの、レーダ観測におけるパラメータを格納する。受信データ格納部2は、レーダ観測により得られた受信信号を格納する。軌道情報格納部3は、レーダ観測時のプラットフォームの軌道を格納する。画像格納部4は、本装置の出力となる、画像再生処理を経て得られたレーダ画像を格納する。制御部10は、各格納部からのデータの入出力、及び後述する装置を構成する部位間のデータのやり取りを制御する。
【0014】
制御部10は、動揺補償部20と、レンジ圧縮部31と、アジマス圧縮部32と、区画の統合部40とが含まれる。また、動揺補償部20は、参照軌道設定部21と、補償点の設定部22と、補償処理部23とから構成されており、プラットフォームの動揺による軌道のずれを算出して受信信号を補償する。レンジ圧縮部31は、レンジ方向における受信信号の信号波形を圧縮する。アジマス圧縮部32は、受信信号のアジマス方向の波形を圧縮する。さらに、区画の統合部40は、平均化処理部41と、合成部42とから構成され、画像再生された区画を統合する。
【0015】
つぎに、この実施の形態1に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係るレーダ画像処理装置の動作を示すフローチャートである。また、図3は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の幾何を示す図である。
【0016】
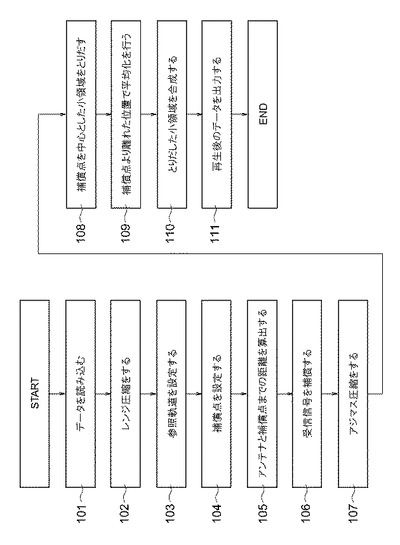
まず、ステップ101において、制御部10は、観測パラメータ格納部1、受信データ格納部2、軌道情報格納部3から、それぞれ格納されているデータを取り出す。
【0017】
次に、ステップ102において、レンジ圧縮部31は、これらの情報に基づいてレンジ圧縮処理を行う。このレンジ圧縮処理とは、例えば非特許文献3(大内和夫著「リモートセンシングのための合成開口レーダの基礎」東京電気大学出版局、2004)の131頁に示されているように、周波数変調を加えて送信されたパルス波形を用いて、受信信号にマッチトフィルタリング処理することにより、パルス幅を圧縮する技術である。また、例えば非特許文献3の191頁に示されているような、deramp(傾斜をなくすという意味)処理方式では、レンジ方向のデータをフーリエ変換することにより、散乱体からの反射を、その散乱体の位置に相当する場所に積み上げる技術である。
【0018】
次に、ステップ103において、制御部10は、動揺補償部20に各種データを入力し、参照軌道設定部21が、プラットフォームの軌道情報から、例えば、実軌道との差が最小となるような直線状の軌道を求め、これを参照軌道として設定する。
【0019】
次に、ステップ104において、補償点の設定部22が、まず、受信信号を幾つかの区画に分割する。そして、それら区画の中心に相当する地表面上の点を求め、この点を補償の基準点に設定する。
【0020】
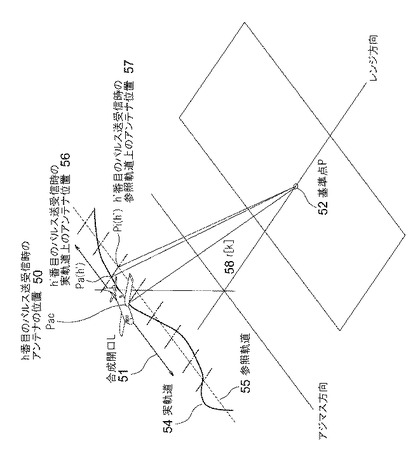
ここで、補償の基準点について、図3を用いて説明する。まず、受信信号上で定めたある区画(図示せず)における中央点の位置が、受信信号においてアジマス方向でh番目、レンジ方向でk番目であるとする。この場合に、h番目のパルス送受信をしたアンテナの位置Pac50より、ビームの照射方向においてレンジ距離r[k]にある地表面上の点を補償の基準点P52とする。
【0021】
次に、ステップ105において、補償処理部23が、まず、アンテナ位置Pac50を中心とした合成開口L51を定める。そして、その開口中における各パルス送受信位置において、実軌道54上のアンテナの位置Pa(h’)56と基準点P52との距離PPa(h’)、参照軌道55上のアンテナ位置Pi(h’)57と基準点P50との距離PPi(h’)を、プラットフォームの移動を考慮しながら求める。そして、式(1)より、プラットフォームの動揺による距離変化Δrを算出する。
【0022】
次に、ステップ106において、補償処理部23が、例えば、式(2)で示される信号を生成し、アジマス方向でh’番目の受信信号に掛けることで動揺補償を行う。
【0023】
【数1】

【0024】
ここで、式(2)のλは、レーダ波の波長であり、観測パラメータ格納部1に格納されている。また、式(2)を掛けることにより、動揺補償を行ったが、他の式を用いてもよい。
【0025】
次に、ステップ107において、アジマス圧縮部32は、動揺補償処理後の受信信号に対して、例えば、非特許文献3の176頁〜190頁に示されているように、レンジマイグレーション補償や、レンジスキュー補正等の補償処理を実施するとともに、アジマス圧縮処理を行う。また、受信信号に応じて、2次レンジ圧縮等の処理を行う。
【0026】
次に、ステップ108において、制御部10は、動揺補償、レンジ圧縮、アジマス圧縮を経て再生された画像を、区画の統合部40に入力する。そして、区画の統合部40が、補償の基準点を中心とした区画を切り出す。
【0027】
次に、ステップ109において、平均化処理部41が、隣接する区画間で、重複して、かつ、補償点より離れた位置の信号をそれぞれ平均化する。
【0028】
次に、ステップ110において、合成部42が、各区画を統合して一枚の画像とする。
【0029】
そして、ステップ111において、制御部10は、統合された画像を1枚の再生画像として、画像格納部4に出力する。
【0030】
以上のように、動揺の補償量が観測領域上の基準点の位置に応じて異なること、ならびに、プラットフォームの移動に応じたアンテナと基準点の距離変化を考慮して、各基準点に対して補償量を計算して補償するようにしているので、補償の誤差を少なくすることができ、焦点のあった高分解能な再生画像を得ることができる。
【0031】
また、精度の高い補償を行うため、受信信号の位相情報を損なうことなく、位相保持性能の高い画像再生処理を実現することができる。また、受信信号を幾つかの区画に分割しているため、区画の大きさに応じて、画像再生に要する処理時間と補償の精度を制御することができる。また、隣接する区画間で、補償点より離れた位置の信号を平均化しているため、補償点より離れた位置での補償誤差が抑圧するとともに、区画間の不連続性を抑圧することができる。また、平均化処理により、位相中に含まれる雑音等による誤差を抑圧することができる。
【0032】
なお、この実施の形態1は、レンジ圧縮処理を、動揺補償の前に実施することを想定して記述したが、動揺補償処理はアジマス圧縮処理の前に実施すればよい。また、この実施の形態1は、画像再生処理アルゴリズムとして、レンジドップラー画像再生アルゴリズムを用いることを想定して記述したが、ポーラフォーマット、deramp処理、ステップ処理、w−kアルゴリズム、チャープスケーリングアルゴリズム等の、他の画像再生アルゴリズムを用いてもよい。
【0033】
実施の形態2.
この発明の実施の形態2に係るレーダ画像処理装置について図4から図6までを参照しながら説明する。図4は、この発明の実施の形態2に係るレーダ画像処理装置の構成を示すブロック図である。
【0034】
上記の実施の形態1では、参照軌道を直線に設定するようにしたものであるが、この実施の形態2では、アンテナの軌道の変化が大きく、一本の直線状の参照軌道では実軌道との差が大きくなる場合に、区分的な直線を参照軌道に設定するものである。
【0035】
図4において、図1と同一の符号を示したものは、同一またはこれに相当するものである。動揺補償部20は、参照軌道設定部21、補償点の設定部22、補償処理部23と、さらに、軌道差判定部24と、軌道の区分化部25とから構成されている。
【0036】
軌道差判定部24は、参照軌道設定部21で設定された参照軌道と実軌道の差を求める。軌道の区分化部25は、参照軌道と実軌道の差が、事前に定められた閾値よりも大きい場合に、区分的な直線状の参照軌道を設定する。
【0037】
つぎに、この実施の形態2に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図5は、この発明の実施の形態2に係るレーダ画像処理装置の動作を示すフローチャートである。また、図6は、この発明の実施の形態2に係るレーダ画像処理装置の動作を説明するための図である。
【0038】
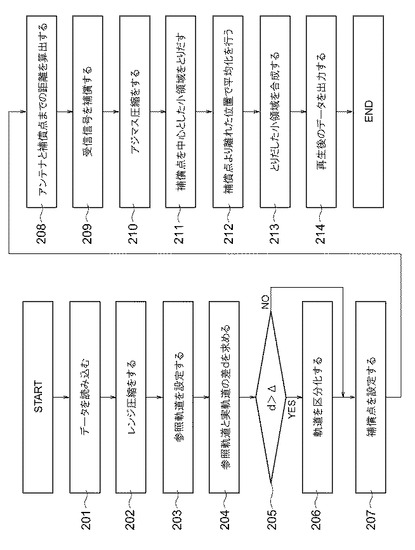
ステップ201〜203、ステップ207〜214の処理は、上記実施の形態1のステップ101〜111とそれぞれ同様である。
【0039】
ステップ204において、軌道差判定部24は、参照軌道設定部21が設定した参照軌道と実軌道の差dを算出する。
【0040】
次に、ステップ205において、軌道差判定部24は、算出した軌道差dと、事前に定められた閾値Δを比較し、d>Δとなる場合は、軌道の区分化部25の処理(ステップ206)へ進む。一方、それ以外の場合は、補償点の設定部22の処理(ステップ207)へ進む。
【0041】
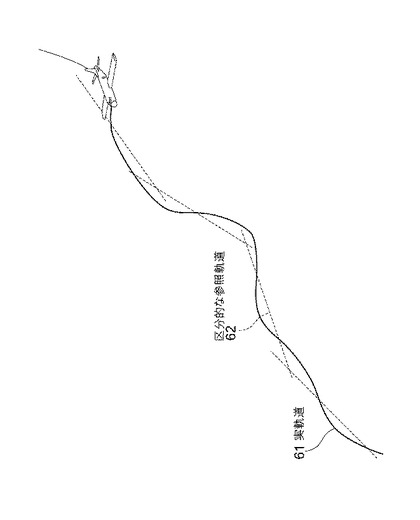
次に、ステップ206において、軌道の区分化部25は、参照軌道と実軌道の差dが閾値Δを超えた場合に、区分的な直線状の参照軌道を設定する。これを、図6を用いて説明する。図6は、機体の動揺が大きく、実軌道61より1本の直線状の参照軌道を定めると、実軌道61と参照軌道の差が大きい場合を示している。この場合に、軌道の区分化部25は、図6に示すような区分的な直線状の参照軌道62を設定する。
【0042】
以上のように、参照軌道を実軌道との差が小さくなるように区分的に設定するため、動揺の補償処理で生じる補償の誤差を小さくすることができる。
【0043】
また、平均化処理を行うため、参照軌道を区分化した場合に問題となる、区分的な軌道の端における、再生後画像信号の不連続性を抑圧することができる。
【0044】
実施の形態3.
この発明の実施の形態3に係るレーダ画像処理装置について図7及び図8までを参照しながら説明する。図7は、この発明の実施の形態3に係るレーダ画像処理装置の構成を示すブロック図である。
【0045】
上記の各実施の形態では、地表面を平坦であると仮定して補償の基準点を定めたものであるが、この実施の形態3では、地表面の標高地図を入力として追加し、この標高地図を元に、補償の基準点を定めるものである。
【0046】
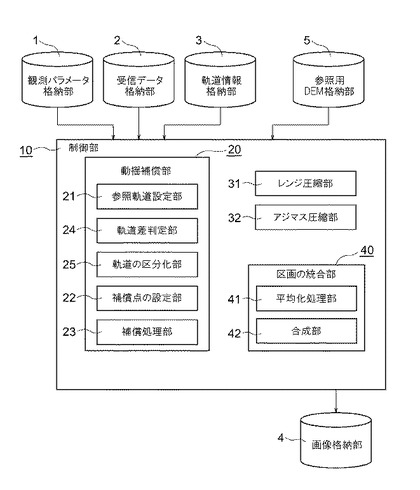
図7において、この実施の形態3に係るレーダ画像処理装置は、さらに、参照用DEM格納部5が設けられている。
【0047】
参照用DEM格納部5は、観測対象領域の3次元モデル(DEM:Digital Elevation Model)(3次元地形データ)を格納する。ここで格納する3次元モデルは、3次元数値地図として一般に提供されている標高地図、あるいは、インターフェロメトリック合成開口レーダで得られた3次元モデル等である。
【0048】
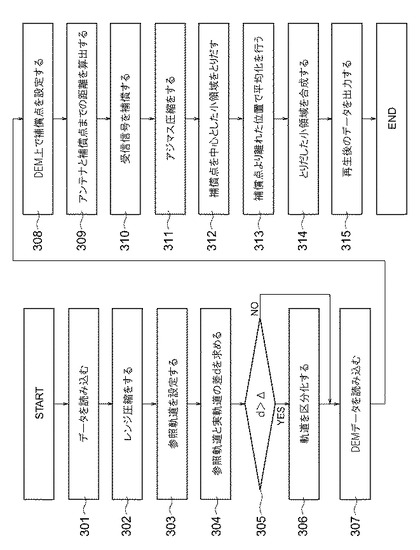
つぎに、この実施の形態3に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図8は、この発明の実施の形態3に係るレーダ画像処理装置の動作を示すフローチャートである。
【0049】
ステップ301〜306、ステップ309〜315の処理は、上記実施の形態2のステップ201〜206、ステップ208〜214とそれぞれ同様である。
【0050】
ステップ307において、制御部10は、参照用DEM格納部5から、参照用のDEMを読み込み、補償点の設定部22に入力する。
【0051】
次に、ステップ308において、補償点の設定部22が、入力されたDEM上において、補償の基準点を定める。
【0052】
このように、地表面の起伏を考慮して補償の基準点を定めているので、アンテナと基準点の正確な距離を算出することができ、正確な補償を行うことができる。この結果、起伏が大きい地形に対しても、焦点のあった高分解能な画像を得ることができる。また、地表面の起伏に応じた動揺補償の誤差を抑圧できるため、位相保持性能の高い画像再生処理を実現することができる。
【図面の簡単な説明】
【0053】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の幾何を示す図である。
【図4】この発明の実施の形態2に係るレーダ画像処理装置の構成を示すブロック図である。
【図5】この発明の実施の形態2に係るレーダ画像処理装置の動作を示すフローチャートである。
【図6】この発明の実施の形態2に係るレーダ画像処理装置の動作を説明するための図である。
【図7】この発明の実施の形態3に係るレーダ画像処理装置の構成を示すブロック図である。
【図8】この発明の実施の形態3に係るレーダ画像処理装置の動作を示すフローチャートである。
【図9】従来のレーダ画像処理装置のレーダ観測の幾何を示す図である。
【符号の説明】
【0054】
1 観測パラメータ格納部、2 受信データ格納部、3 軌道情報格納部、4 画像格納部、5 参照用DEM格納部、10 制御部、20 動揺補償部、21 参照軌道設定部、22 補償点の設定部、23 補償処理部、24 軌道差判定部、25 軌道の区分化部、31 レンジ圧縮部、32 アジマス圧縮部、40 区画の統合部、41 平均化処理部、42 合成部。
【技術分野】
【0001】
この発明は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生するレーダ画像処理装置に関するものである。
【背景技術】
【0002】
レーダ観測の走査方法の中で最も一般的な方法として、ストリップモードがある。この走査方法は、固定したアンテナからビームを照射し、プラットフォームの動きに沿って細長く走査する方法である。ここでプラットフォームとは、レーダを搭載した航空機等の移動体を示す。同走査方法で取得した受信信号からレーダ画像を再生する画像再生処理では、アンテナの軌道は直線であるとして処理を行う。以降、この画像再生処理に用いるアンテナの軌道を参照軌道と呼ぶ。しかし、実際には、アンテナの軌道は観測時の風等の影響により直線ではない。このため、実際の軌道と参照軌道との差に応じて受信信号を補償する動揺補償処理が必要になる。
【0003】
同走査方法で得た受信信号に対して画像再生処理を行うための、従来のレーダ画像処理装置では、実際の軌道と参照軌道との差を、参照軌道と直行する方向で算出し、その差に基づいて受信信号を補償していた(例えば、非特許文献1参照)。
【0004】
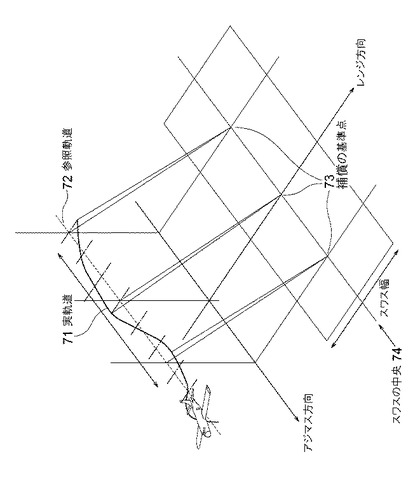
この補償処理を、図9に示すレーダ観測の幾何を用いて説明する。図9において、実軌道71は実際のアンテナの軌道を示し、参照軌道72は画像再生で用いられる直線のアンテナ軌道である。また、スワスの中央74は、ビームの観測幅(スワス幅)の中央を示し、補償の基準点73は実軌道71と参照軌道72との差を算出する際に基準となる点を示す。
【0005】
従来のレーダ画像処理装置では、パルスの送受信位置毎に、参照軌道72に直行する面内で、かつ、観測領域のスワス中心上にある点を、補償の基準点73として設定する。そして、基準点73に対する実際の軌道71の距離と参照軌道72の距離の差を求め、この距離差に基づいて、その基準点73と同じ面内にあるパルス送受信位置で得られた受信信号の補償を行う。また、参照軌道72を区分的な直線状の線分として設定し、その参照軌道72と実軌道71の基準点に対する距離の差を算出して受信信号を補償する方法も提案されている(例えば、非特許文献2参照)。
【0006】
【非特許文献1】W.G.Carrara, R.S.Goodman, R.M.Majewski, Spotlight Synthetic Aperture Radar signal processing algorithms, Artech House, 1995, p.67.
【非特許文献2】S.N.Madsen, H.A.Zebker, J.Martin, “Topographic Mapping Using Radar Interferometry: processing techniques,” IEEE Transactions on Geoscience and remote sensing, vol.31, no.1, January 1993.
【発明の開示】
【発明が解決しようとする課題】
【0007】
レーダ画像処理装置では、プラットフォームの移動により生じる、地表面上の点とアンテナとの距離変化を利用し、受信信号のアジマス方向での圧縮を行い、その地点での結像を得る。従って、動揺補償処理において、地表面上の点に対する実軌道と参照軌道との距離の差は、本来、プラットフォームの移動に応じた距離の変化を考慮して算出する必要がある。このプラットフォームの移動に伴う距離の差の変化は、アジマスビーム幅が大きい高分解能なレーダ程、合成開口に要するプラットフォームの移動距離が長いため大きくなる。また、その変化の仕方は、観測対象領域上にある点の位置に応じて異なる。従来のレーダ画像処理装置は、このプラットフォームの移動や散乱点の位置に応じた距離変化を考慮せず、参照軌道に直行する面内での距離差を補償量として補償していたため、その補償量が誤差をもち、再生された画像の分解能が劣化するという問題点があった。この問題点は、特にアジマス方向で高分解能、広い観測幅をもつシステムで大きくなる。また、参照信号を区分的な線分として設定し、実軌道と参照軌道との差を小さくすることで補償の誤差を小さくする方法においても、線分の端では補償誤差が大きく、かつ、その誤差が接続部で不連続になるため、再生後の画像に不連続部分が生じるという問題点があった。これら従来方法での補償の誤差は、異なる位置に設置した2つのアンテナで観測した、2枚の再生後の画像の位相差に基づき地表面の3次元形状を測定する場合には、大きな測定誤差を生じさせるという問題点があった。
【0008】
この発明は、上述のような課題を解決するためになされたもので、その目的は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生することができるレーダ画像処理装置を得るものである。
【課題を解決するための手段】
【0009】
この発明に係るレーダ画像処理装置は、観測パラメータとして少なくともレーダ波の波長を格納する観測パラメータ格納部と、レーダ観測により得られた受信信号を格納する受信データ格納部と、レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部と、前記軌道情報格納部に格納された前記プラットフォームの軌道情報から、直線状の軌道を求めて参照軌道として設定し、前記受信データ格納部に格納された受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、アンテナ位置を中心とした合成開口を定め、前記合成開口中における各パルス送受信位置において、実軌道上のアンテナ位置と前記補償の基準点との第1の距離、及び前記参照軌道上のアンテナ位置と前記補償の基準点との第2の距離を、前記プラットフォームの移動を考慮しながらそれぞれ求め、前記プラットフォームの動揺による、前記第1及び第2の距離の差分である距離変化を算出し、前記波長及び距離変化に基づいて前記受信信号を補償する動揺補償部とを設けたものである。
【発明の効果】
【0010】
この発明に係るレーダ画像処理装置は、参照軌道と実軌道の地表面上の点に対する距離差を精度高く算出し受信信号を補償することで、焦点のあった、高分解能で、位相を精度高く保持したレーダ画像を再生することができるという効果を奏する。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
この発明の実施の形態1に係るレーダ画像処理装置について図1から図3までを参照しながら説明する。図1は、この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0012】
図1において、この実施の形態1に係るレーダ画像処理装置は、観測パラメータ格納部1と、受信データ格納部2と、軌道情報格納部3と、画像格納部4と、制御部10とが設けられている。
【0013】
観測パラメータ格納部1は、レーダ波の波長や、周波数、偏波、レンジゲート設定距離などの、レーダ観測におけるパラメータを格納する。受信データ格納部2は、レーダ観測により得られた受信信号を格納する。軌道情報格納部3は、レーダ観測時のプラットフォームの軌道を格納する。画像格納部4は、本装置の出力となる、画像再生処理を経て得られたレーダ画像を格納する。制御部10は、各格納部からのデータの入出力、及び後述する装置を構成する部位間のデータのやり取りを制御する。
【0014】
制御部10は、動揺補償部20と、レンジ圧縮部31と、アジマス圧縮部32と、区画の統合部40とが含まれる。また、動揺補償部20は、参照軌道設定部21と、補償点の設定部22と、補償処理部23とから構成されており、プラットフォームの動揺による軌道のずれを算出して受信信号を補償する。レンジ圧縮部31は、レンジ方向における受信信号の信号波形を圧縮する。アジマス圧縮部32は、受信信号のアジマス方向の波形を圧縮する。さらに、区画の統合部40は、平均化処理部41と、合成部42とから構成され、画像再生された区画を統合する。
【0015】
つぎに、この実施の形態1に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係るレーダ画像処理装置の動作を示すフローチャートである。また、図3は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の幾何を示す図である。
【0016】
まず、ステップ101において、制御部10は、観測パラメータ格納部1、受信データ格納部2、軌道情報格納部3から、それぞれ格納されているデータを取り出す。
【0017】
次に、ステップ102において、レンジ圧縮部31は、これらの情報に基づいてレンジ圧縮処理を行う。このレンジ圧縮処理とは、例えば非特許文献3(大内和夫著「リモートセンシングのための合成開口レーダの基礎」東京電気大学出版局、2004)の131頁に示されているように、周波数変調を加えて送信されたパルス波形を用いて、受信信号にマッチトフィルタリング処理することにより、パルス幅を圧縮する技術である。また、例えば非特許文献3の191頁に示されているような、deramp(傾斜をなくすという意味)処理方式では、レンジ方向のデータをフーリエ変換することにより、散乱体からの反射を、その散乱体の位置に相当する場所に積み上げる技術である。
【0018】
次に、ステップ103において、制御部10は、動揺補償部20に各種データを入力し、参照軌道設定部21が、プラットフォームの軌道情報から、例えば、実軌道との差が最小となるような直線状の軌道を求め、これを参照軌道として設定する。
【0019】
次に、ステップ104において、補償点の設定部22が、まず、受信信号を幾つかの区画に分割する。そして、それら区画の中心に相当する地表面上の点を求め、この点を補償の基準点に設定する。
【0020】
ここで、補償の基準点について、図3を用いて説明する。まず、受信信号上で定めたある区画(図示せず)における中央点の位置が、受信信号においてアジマス方向でh番目、レンジ方向でk番目であるとする。この場合に、h番目のパルス送受信をしたアンテナの位置Pac50より、ビームの照射方向においてレンジ距離r[k]にある地表面上の点を補償の基準点P52とする。
【0021】
次に、ステップ105において、補償処理部23が、まず、アンテナ位置Pac50を中心とした合成開口L51を定める。そして、その開口中における各パルス送受信位置において、実軌道54上のアンテナの位置Pa(h’)56と基準点P52との距離PPa(h’)、参照軌道55上のアンテナ位置Pi(h’)57と基準点P50との距離PPi(h’)を、プラットフォームの移動を考慮しながら求める。そして、式(1)より、プラットフォームの動揺による距離変化Δrを算出する。
【0022】
次に、ステップ106において、補償処理部23が、例えば、式(2)で示される信号を生成し、アジマス方向でh’番目の受信信号に掛けることで動揺補償を行う。
【0023】
【数1】
【0024】
ここで、式(2)のλは、レーダ波の波長であり、観測パラメータ格納部1に格納されている。また、式(2)を掛けることにより、動揺補償を行ったが、他の式を用いてもよい。
【0025】
次に、ステップ107において、アジマス圧縮部32は、動揺補償処理後の受信信号に対して、例えば、非特許文献3の176頁〜190頁に示されているように、レンジマイグレーション補償や、レンジスキュー補正等の補償処理を実施するとともに、アジマス圧縮処理を行う。また、受信信号に応じて、2次レンジ圧縮等の処理を行う。
【0026】
次に、ステップ108において、制御部10は、動揺補償、レンジ圧縮、アジマス圧縮を経て再生された画像を、区画の統合部40に入力する。そして、区画の統合部40が、補償の基準点を中心とした区画を切り出す。
【0027】
次に、ステップ109において、平均化処理部41が、隣接する区画間で、重複して、かつ、補償点より離れた位置の信号をそれぞれ平均化する。
【0028】
次に、ステップ110において、合成部42が、各区画を統合して一枚の画像とする。
【0029】
そして、ステップ111において、制御部10は、統合された画像を1枚の再生画像として、画像格納部4に出力する。
【0030】
以上のように、動揺の補償量が観測領域上の基準点の位置に応じて異なること、ならびに、プラットフォームの移動に応じたアンテナと基準点の距離変化を考慮して、各基準点に対して補償量を計算して補償するようにしているので、補償の誤差を少なくすることができ、焦点のあった高分解能な再生画像を得ることができる。
【0031】
また、精度の高い補償を行うため、受信信号の位相情報を損なうことなく、位相保持性能の高い画像再生処理を実現することができる。また、受信信号を幾つかの区画に分割しているため、区画の大きさに応じて、画像再生に要する処理時間と補償の精度を制御することができる。また、隣接する区画間で、補償点より離れた位置の信号を平均化しているため、補償点より離れた位置での補償誤差が抑圧するとともに、区画間の不連続性を抑圧することができる。また、平均化処理により、位相中に含まれる雑音等による誤差を抑圧することができる。
【0032】
なお、この実施の形態1は、レンジ圧縮処理を、動揺補償の前に実施することを想定して記述したが、動揺補償処理はアジマス圧縮処理の前に実施すればよい。また、この実施の形態1は、画像再生処理アルゴリズムとして、レンジドップラー画像再生アルゴリズムを用いることを想定して記述したが、ポーラフォーマット、deramp処理、ステップ処理、w−kアルゴリズム、チャープスケーリングアルゴリズム等の、他の画像再生アルゴリズムを用いてもよい。
【0033】
実施の形態2.
この発明の実施の形態2に係るレーダ画像処理装置について図4から図6までを参照しながら説明する。図4は、この発明の実施の形態2に係るレーダ画像処理装置の構成を示すブロック図である。
【0034】
上記の実施の形態1では、参照軌道を直線に設定するようにしたものであるが、この実施の形態2では、アンテナの軌道の変化が大きく、一本の直線状の参照軌道では実軌道との差が大きくなる場合に、区分的な直線を参照軌道に設定するものである。
【0035】
図4において、図1と同一の符号を示したものは、同一またはこれに相当するものである。動揺補償部20は、参照軌道設定部21、補償点の設定部22、補償処理部23と、さらに、軌道差判定部24と、軌道の区分化部25とから構成されている。
【0036】
軌道差判定部24は、参照軌道設定部21で設定された参照軌道と実軌道の差を求める。軌道の区分化部25は、参照軌道と実軌道の差が、事前に定められた閾値よりも大きい場合に、区分的な直線状の参照軌道を設定する。
【0037】
つぎに、この実施の形態2に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図5は、この発明の実施の形態2に係るレーダ画像処理装置の動作を示すフローチャートである。また、図6は、この発明の実施の形態2に係るレーダ画像処理装置の動作を説明するための図である。
【0038】
ステップ201〜203、ステップ207〜214の処理は、上記実施の形態1のステップ101〜111とそれぞれ同様である。
【0039】
ステップ204において、軌道差判定部24は、参照軌道設定部21が設定した参照軌道と実軌道の差dを算出する。
【0040】
次に、ステップ205において、軌道差判定部24は、算出した軌道差dと、事前に定められた閾値Δを比較し、d>Δとなる場合は、軌道の区分化部25の処理(ステップ206)へ進む。一方、それ以外の場合は、補償点の設定部22の処理(ステップ207)へ進む。
【0041】
次に、ステップ206において、軌道の区分化部25は、参照軌道と実軌道の差dが閾値Δを超えた場合に、区分的な直線状の参照軌道を設定する。これを、図6を用いて説明する。図6は、機体の動揺が大きく、実軌道61より1本の直線状の参照軌道を定めると、実軌道61と参照軌道の差が大きい場合を示している。この場合に、軌道の区分化部25は、図6に示すような区分的な直線状の参照軌道62を設定する。
【0042】
以上のように、参照軌道を実軌道との差が小さくなるように区分的に設定するため、動揺の補償処理で生じる補償の誤差を小さくすることができる。
【0043】
また、平均化処理を行うため、参照軌道を区分化した場合に問題となる、区分的な軌道の端における、再生後画像信号の不連続性を抑圧することができる。
【0044】
実施の形態3.
この発明の実施の形態3に係るレーダ画像処理装置について図7及び図8までを参照しながら説明する。図7は、この発明の実施の形態3に係るレーダ画像処理装置の構成を示すブロック図である。
【0045】
上記の各実施の形態では、地表面を平坦であると仮定して補償の基準点を定めたものであるが、この実施の形態3では、地表面の標高地図を入力として追加し、この標高地図を元に、補償の基準点を定めるものである。
【0046】
図7において、この実施の形態3に係るレーダ画像処理装置は、さらに、参照用DEM格納部5が設けられている。
【0047】
参照用DEM格納部5は、観測対象領域の3次元モデル(DEM:Digital Elevation Model)(3次元地形データ)を格納する。ここで格納する3次元モデルは、3次元数値地図として一般に提供されている標高地図、あるいは、インターフェロメトリック合成開口レーダで得られた3次元モデル等である。
【0048】
つぎに、この実施の形態3に係るレーダ画像処理装置の動作について図面を参照しながら説明する。図8は、この発明の実施の形態3に係るレーダ画像処理装置の動作を示すフローチャートである。
【0049】
ステップ301〜306、ステップ309〜315の処理は、上記実施の形態2のステップ201〜206、ステップ208〜214とそれぞれ同様である。
【0050】
ステップ307において、制御部10は、参照用DEM格納部5から、参照用のDEMを読み込み、補償点の設定部22に入力する。
【0051】
次に、ステップ308において、補償点の設定部22が、入力されたDEM上において、補償の基準点を定める。
【0052】
このように、地表面の起伏を考慮して補償の基準点を定めているので、アンテナと基準点の正確な距離を算出することができ、正確な補償を行うことができる。この結果、起伏が大きい地形に対しても、焦点のあった高分解能な画像を得ることができる。また、地表面の起伏に応じた動揺補償の誤差を抑圧できるため、位相保持性能の高い画像再生処理を実現することができる。
【図面の簡単な説明】
【0053】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の幾何を示す図である。
【図4】この発明の実施の形態2に係るレーダ画像処理装置の構成を示すブロック図である。
【図5】この発明の実施の形態2に係るレーダ画像処理装置の動作を示すフローチャートである。
【図6】この発明の実施の形態2に係るレーダ画像処理装置の動作を説明するための図である。
【図7】この発明の実施の形態3に係るレーダ画像処理装置の構成を示すブロック図である。
【図8】この発明の実施の形態3に係るレーダ画像処理装置の動作を示すフローチャートである。
【図9】従来のレーダ画像処理装置のレーダ観測の幾何を示す図である。
【符号の説明】
【0054】
1 観測パラメータ格納部、2 受信データ格納部、3 軌道情報格納部、4 画像格納部、5 参照用DEM格納部、10 制御部、20 動揺補償部、21 参照軌道設定部、22 補償点の設定部、23 補償処理部、24 軌道差判定部、25 軌道の区分化部、31 レンジ圧縮部、32 アジマス圧縮部、40 区画の統合部、41 平均化処理部、42 合成部。
【特許請求の範囲】
【請求項1】
観測パラメータとして少なくともレーダ波の波長を格納する観測パラメータ格納部と、
レーダ観測により得られた受信信号を格納する受信データ格納部と、
レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部と、
前記軌道情報格納部に格納された前記プラットフォームの軌道情報から、直線状の軌道を求めて参照軌道として設定し、
前記受信データ格納部に格納された受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、
アンテナ位置を中心とした合成開口を定め、前記合成開口中における各パルス送受信位置において、実軌道上のアンテナ位置と前記補償の基準点との第1の距離、及び前記参照軌道上のアンテナ位置と前記補償の基準点との第2の距離を、前記プラットフォームの移動を考慮しながらそれぞれ求め、
前記プラットフォームの動揺による、前記第1及び第2の距離の差分である距離変化を算出し、
前記波長及び距離変化に基づいて前記受信信号を補償する動揺補償部と
を備えたことを特徴とするレーダ画像処理装置。
【請求項2】
各区画の画像再生後に各区画を合成して一枚の画像を作る区画の統合部をさらに備えた
ことを特徴とするレーダ請求項1記載のレーダ画像処理装置。
【請求項3】
前記区画の統合部は、隣接する区画の重なりあう部分の平均をとる平均化処理部を含む
ことを特徴とするレーダ請求項2記載のレーダ画像処理装置。
【請求項4】
前記動揺補償部は、前記参照軌道として、区分的な直線を設定する
ことを特徴とするレーダ請求項1、2又は3記載のレーダ画像処理装置。
【請求項5】
3次元地形データを格納する参照用DEM格納部をさらに備え、
前記動揺補償部は、前記参照用DEM格納部に格納された3次元地形データ上において、補償の基準点を設定する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ画像処理装置。
【請求項1】
観測パラメータとして少なくともレーダ波の波長を格納する観測パラメータ格納部と、
レーダ観測により得られた受信信号を格納する受信データ格納部と、
レーダ観測時におけるプラットフォームの軌道情報を格納する軌道情報格納部と、
前記軌道情報格納部に格納された前記プラットフォームの軌道情報から、直線状の軌道を求めて参照軌道として設定し、
前記受信データ格納部に格納された受信信号を複数の区画に分割し、区画の中心に相当する地表面上の点を求めて補償の基準点として設定し、
アンテナ位置を中心とした合成開口を定め、前記合成開口中における各パルス送受信位置において、実軌道上のアンテナ位置と前記補償の基準点との第1の距離、及び前記参照軌道上のアンテナ位置と前記補償の基準点との第2の距離を、前記プラットフォームの移動を考慮しながらそれぞれ求め、
前記プラットフォームの動揺による、前記第1及び第2の距離の差分である距離変化を算出し、
前記波長及び距離変化に基づいて前記受信信号を補償する動揺補償部と
を備えたことを特徴とするレーダ画像処理装置。
【請求項2】
各区画の画像再生後に各区画を合成して一枚の画像を作る区画の統合部をさらに備えた
ことを特徴とするレーダ請求項1記載のレーダ画像処理装置。
【請求項3】
前記区画の統合部は、隣接する区画の重なりあう部分の平均をとる平均化処理部を含む
ことを特徴とするレーダ請求項2記載のレーダ画像処理装置。
【請求項4】
前記動揺補償部は、前記参照軌道として、区分的な直線を設定する
ことを特徴とするレーダ請求項1、2又は3記載のレーダ画像処理装置。
【請求項5】
3次元地形データを格納する参照用DEM格納部をさらに備え、
前記動揺補償部は、前記参照用DEM格納部に格納された3次元地形データ上において、補償の基準点を設定する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ画像処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−256058(P2007−256058A)
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願番号】特願2006−80466(P2006−80466)
【出願日】平成18年3月23日(2006.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年10月4日(2007.10.4)
【国際特許分類】
【出願日】平成18年3月23日(2006.3.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]