
レーダ画像処理装置
【課題】2以上のレーダ画像を用いて算出した地形の高さの誤差の2次元的分布をレーダ画像から算出する。
【解決手段】2以上の受信局で観測されたレーダ画像を格納するレーダ画像格納部1と、それらのレーダ画像から地表面の高さを算出する処理で用いられた処理パラメータ等を格納する観測・処理パラメータ格納部2と、レーダ画像間のコヒーレンスからコヒーレンスマップを求めるコヒーレンスマップ計算部200と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部300と、観測・処理パラメータ格納部2に格納された地表面の高さの変化に対するレーダ画像間の位相差の変化の感度を算出する位相標高感度計算部400と、算出された位相誤差に基づいて測高誤差の分布を求める測高誤差計算部500と、それを格納する測高誤差分布格納部3とを備えている。
【解決手段】2以上の受信局で観測されたレーダ画像を格納するレーダ画像格納部1と、それらのレーダ画像から地表面の高さを算出する処理で用いられた処理パラメータ等を格納する観測・処理パラメータ格納部2と、レーダ画像間のコヒーレンスからコヒーレンスマップを求めるコヒーレンスマップ計算部200と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部300と、観測・処理パラメータ格納部2に格納された地表面の高さの変化に対するレーダ画像間の位相差の変化の感度を算出する位相標高感度計算部400と、算出された位相誤差に基づいて測高誤差の分布を求める測高誤差計算部500と、それを格納する測高誤差分布格納部3とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明はレーダ画像処理装置に関し、特に、地表等の観測を行う航空機や衛星に搭載されたレーダによって得られる画像の処理を行うためのレーダ画像処理装置に関する。
【背景技術】
【0002】
従来のレーダ画像処理装置は、送信局と受信局を分離して設けて構成するマルチスタティック方式で得られた、少なくとも2枚のレーダ画像の位相差から、位相差が地形の高さに応じた値を持つことを利用して、地形の高さを算出していた(例えば、特許文献1参照。)。
【0003】
【特許文献1】特開平11−125674号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のレーダ画像処理装置は、少なくとも2枚のレーダ画像から算出した位相差が、地表面の状態(例えば、水面や森林部といった土地被覆の状態)に応じて誤差を持つことを考慮していないため、位相差から算出した地形の高さが持つ誤差を得ることができないという問題点があった。
【0005】
この結果、算出した地形の高さ分布、すなわち、成果物となる地形の高さを表す地図の精度を求めるためには、成果物と比較するための観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図を必要とするという問題点があった。
【0006】
また、比較するための観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図のデータがある地点では成果物の精度を求めることができるが、そのような情報やデータがない地点については成果物の精度を求めることができず、地形の高さが持つ誤差の2次元的な精度分布が得られないという問題があった。
【0007】
また、比較用のデータと成果物とを比較することにより得られる成果物の高さ精度は、レーダ画像から地形の高さを求めるための処理アルゴリズムで発生する処理上の誤差を含んだ精度となるため、レーダ画像から得られる地形高さの潜在的な精度を実現できないという問題点があった。
【0008】
この発明は上記のような問題点を解決するためになされたもので、1以上の受信局で観測された少なくとも2枚のレーダ画像を用いて算出した地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)を、観測対象領域内にある基準点の位置情報や他のセンサ等で得られた参照用の高さ地図を必要とせずに、レーダ画像から算出することができるレーダ画像処理装置を得ることを目的としている。
【課題を解決するための手段】
【0009】
この発明は、異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部とを備えたレーダ画像処理装置である。
【発明の効果】
【0010】
この発明は、異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部とを備えたレーダ画像処理装置であるので、1以上の受信局で観測された少なくとも2枚のレーダ画像を用いて算出した地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)を、観測対象領域内にある基準点の位置情報や他のセンサ等で得られた参照用の高さ地図を必要とせずに、レーダ画像から算出することができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
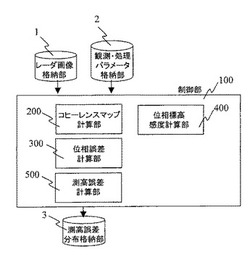
図1はこの発明の実施の形態1におけるレーダ画像処理装置の構成を示すブロック構成図である。なお、本実施の形態1におけるレーダ画像処理装置は、送信局と受信局を分離して設けて構成するマルチスタティック方式で得られた少なくとも2枚のレーダ画像を用いて算出する地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)をレーダ画像から算出するものである。
【0012】
図1において、レーダ画像格納部1は、異なる位置に設置された2以上の受信局で観測された複数のレーダ画像を格納する。なお、ここで格納されるレーダ画像は、画像間で対応する画素が地表面上における同一の点を示すよう位置あわせされた、レジストレーション処理済みの画像である。観測・処理パラメータ格納部2は、レーダ観測時のマイクロ波の波長や、アンテナの位置情報、レーダ画像から地形の高さを算出する処理において用いた各種処理パラメータ等を格納する。測高誤差分布格納部3は、この発明の実施の形態1の出力となる、地形の高さ算出誤差の分布を格納する。制御部100は、図1に示すように、コヒーレンスマップ計算部200と、位相誤差計算部300と、位相標高感度計算部400と、測高誤差計算部500とを備え、上述のレーダ画像格納部1、観測・処理パラメータ格納部2、測高誤差分布格納部3との間のデータの入出力、および、各部200〜500間のデータのやりとりを制御する。コヒーレンスマップ計算部200は、複数のレーダ画像間のコヒーレンスの分布、つまり、コヒーレンスマップを算出する。位相誤差計算部300は、コヒーレンスマップ計算部200で算出されたコヒーレンスと観測・処理パラメータ格納部2に格納されたパラメータとに基づき、レーダ画像間に含まれる位相誤差を算出する。位相標高感度計算部400は、観測・処理パラメータ格納部2に格納されたパラメータから、位相差の地形(地表面)の高さ変化に対する感度を計算する。標高誤差計算部500は、位相誤差計算部300と位相標高感度計算部400とで計算された値に基づき、位相誤差を高さ誤差に換算する。
【0013】
次に動作について説明する。
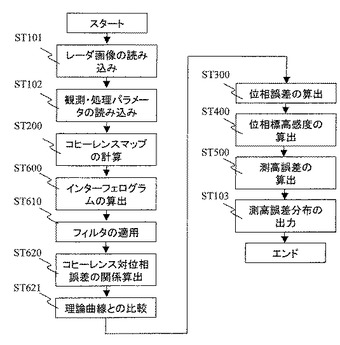
図2は、本実施の形態1によるレーダ画像処理装置の処理の流れを示すフローチャートである。
まず、ステップST101において、制御部100が、レーダ画像格納部1から、格納されている複数のレーダ画像を読み込む。
次に、ステップST102において、観測・処理パラメータ格納部2から、格納されているパラメータを読み込む。
次に、ステップST200において、制御部100がコヒーレンスマップ計算部200にレーダ画像を入力する。そして、コヒーレンスマップ計算部200が、レーダ画像中の各画素の位置(m,n)において、2枚のレーダ画像から、複素コヒーレンスρを算出する。この位置(m,n)における複素コヒーレンスρ(m,n)は下記の式(1)で表されるものである。
【0014】
【数1】

【0015】
ここで、s1,kは1枚目のレーダ画像における位置(m,n)を中心としたN個の画素がもつ複素データ値を示し、s2,kは2枚目のレーダ画像における位置(m,n)を中心としたN個の画素がもつ複素データ値を示す。個数Nは、位置(m,n)を中心とした複素コヒーレンスを計算する範囲に相当する。また、θは偏角を表す。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。*は複素共役を示す。ρは複素コヒーレンスの振幅であり、コヒーレンスと呼ばれる。このコヒーレンスρは、2枚のレーダ画像間の相関性を表し、0から1の間の値をとる。
【0016】
なお、ここでは、コヒーレンス計算に上記の式(1)で表されるコヒーレンスを用いたが、コヒーレンスの定義はこれに限られるものではなく、例えば、R. Touzi, A. Lopes, J. Bruniquel and P.W. Vachon, "Coherence estimation for SAR imagery", IEEE Transactions on Geoscience and Remote Sensing, Vol.37, No.1, pp.135-149, January 1999 等に記載されている定義式に基づいて算出しても良い。
【0017】
次に、コヒーレンスマップ計算部200は、こうして算出されたコヒーレンスρを用いて、それの2次元分布を算出する。以降、コヒーレンスρの2次元分布をコヒーレンスマップと呼ぶ。
【0018】
次に、ステップST300において、制御部100が、コヒーレンスマップ計算部200で算出されたコヒーレンスマップと、観測・処理パラメータ格納部2から読み込んだパラメータとを、位相誤差計算部300へ入力する。そして、位相誤差計算部300が、コヒーレンスマップを基に位相差の理論的な統計分布pn[Φ]を算出する。この理論的な統計分布(確率密度分布)は下記の式(2)で表されるものである。
【0019】
【数2】
【0020】
ここで、Φは位相差で、範囲は−πからπであり、nはマルチルック数、β=ρcos[Φ]である。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。また、Γはガンマ関数、Fはガウスの超幾何関数である。なお、このマルチルック数nは、インターフェログラムと呼ばれるレーダ画像間の位相差Φに対するマルチルック処理を下記の式(3)で定義する場合の、空間的平均に用いるデータ個数Nに相当する。
【0021】
【数3】
【0022】
ここで、Argは偏角を表すオペレータを示す。
【0023】
なお、上記の式(2)は、例えば、J.S.Lee, K.W.Hoppel, S.A.Mango, and A.R.Miller, "Intensity and Phase Statistics of Multilook Polarimetric and Interferometric SAR Imagery", IEEE Transactions on Geoscience and Remote Sensing, Vol.32, No.5, pp.1017-pp.1028, September 1994 等に記載されている。
【0024】
ここで、理論的な統計分布の算出には、上記の式(2)を用いたが、これに限るものではなく、位相差の統計分布を示すものであれば他の式を用いてもよい。
【0025】
次に、位相誤差計算部300が、上記の式(3)で求められたΦを用いて、下記の式(4)により、位相差の標準偏差σを算出し、この標準偏差σを位相誤差とする。
【0026】
【数4】
【0027】
なお、ここでは、上記の式(2)で統計分布pn[Φ]を算出し、式(4)で標準偏差σを算出するというように、2段階で位相誤差を算出したが、位相誤差の算出はこれに限るものではなく、例えば、事前にコヒーレンスと位相誤差の関係を定式化しておいて、この関係を用いることでコヒーレンスとマルチルック数から位相誤差を直接算出するようにしても良い。
【0028】
次に、ステップST400において、制御部100が、観測・処理パラメータ格納部2から読み込んだパラメータを、位相標高感度計算部400へ入力する。そして、位相標高感度計算部400が、下記の式(5)を用いて、地形(地表面)の高さ変化に対する位相差Φの変化の感度dh/dΦ(以下、位相標高感度dh/dΦと呼ぶ)を計算する。
【0029】
【数5】
【0030】
ここで、hは地形(地表面)の高さ、λはレーダ波の波長、γはアンテナから地表面までの距離である。また、kは観測方式に応じたパラメータであり、2開口同時観測の場合は1となり、1開口繰り返し観測の場合は2となる。また、Β⊥は基線長(アンテナ間の距離)のレーダ波の視線方向に垂直な成分、Θは地表面を平坦であると仮定した基準平面でのレーダ波の入射角を示す。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。
【0031】
次に、ステップST500において、制御部100が、位相誤差計算部300で算出された位相誤差σと位相標高感度計算部400で算出された位相標高感度dh/dΦとを、測高誤差計算部500に入力する。そして、前記測高誤差計算部500が、下記の式(6)を用いて、位相誤差σを地形の高さ誤差(測高誤差)Δhへ換算する。
【0032】
【数6】
【0033】
この地形の高さ誤差Δhの分布が、レーダ画像を用いて測った地形の高さの誤差分布、つまり、測高誤差分布となるので、測高誤差計算部500は、求めた地形の高さ誤差Δhから測高誤差分布を算出する。
【0034】
次に、ステップST103において、制御部100が、測高誤差計算部500で算出された測高誤差分布を、測高誤差分布格納部3へ出力する。
【0035】
以上のように、本実施の形態1においては、地形の高さ計測に用いる、実観測で得られたレーダ画像のコヒーレンスマップを求め、このコヒーレンスマップが示すコヒーレンスの値に基づいて測高誤差を算出するようにしているので、測高誤差の局所的な分布を算出することができる。
【0036】
また、実観測で得られたレーダ画像のコヒーレンスマップに基づいて測高誤差を算出するようにしているので、高さ誤差算出用に、観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図などを必要としない。
【0037】
また、実観測で得られたレーダ画像のコヒーレンスマップを2次元的な分布として用いて測高誤差を算出しているので、観測範囲における測高誤差を2次元的、つまり、面的に算出することができる。
【0038】
また、地表面の状態に応じて値が変化するコヒーレンスマップに基づいて測高誤差を算出するようにしているので、地表面上の状態に応じた測高誤差を算出することができ、レーダ画像から地形の高さを求めた結果の内で精度が保証できる範囲の情報を提供することができる。
【0039】
また、実観測で得られたレーダ画像のコヒーレンスマップに基づいて測高誤差を算出するようにしているので、レーダ画像から地形の高さを算出する際に用いられる処理アルゴリズムで発生する処理上の誤差を除いた、レーダ画像から得られる地形高さの潜在的な精度を算出することができる。
【0040】
実施の形態2.
上述の実施の形態1では、レーダ画像から地形の高さを求める処理において、インターフェログラムに対して位相雑音を低減するための上記の式(3)で定義されるマルチルック処理が行われる場合を想定したものであるが、本実施の形態2においては、このマルチルック処理以外の位相雑音を低減するためのフィルタが行われる場合に対処する実施の形態を示す。
【0041】
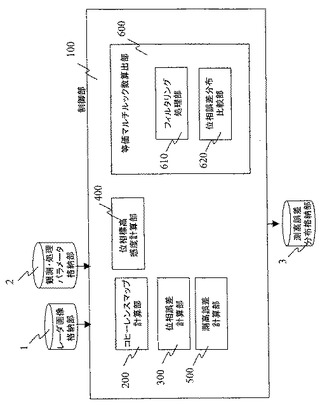
図3は、この発明の実施の形態2におけるレーダ画像処理装置の構成を示すブロック構成図である。図3において、図1と同一の符号を付したものは、同一またはこれに相当するものであるので説明を省略する。図3において、等価マルチルック数算出部600は、インターフェログラムの位相雑音フィルタの位相雑音低減効果をマルチルック数に換算するものであり、図3に示すように、フィルタリング処理部610と位相誤差分布比較部620とを備えている。
【0042】
次に動作について説明する。図4は、この実施の形態2によるレーダ画像処理装置の処理の流れを示すフローチャートである。図4において、図2と同一の符号を付したものは、同一またはこれに相当するものであるので、ここでは説明を省略する。すなわち、図4の処理においては、図2のステップST200とステップST300との間に、ステップST600,ST610,ST620,ST621の処理が追加されている点が異なる。本実施の形態2においては、追加されたこれらの処理を中心に説明することとする。
【0043】
本実施の形態2においては、図4に示すように、まず、実施の形態1で説明したステップST101,ST102,ST200と同一の処理を行う。
【0044】
次に、ステップST600において、制御部100が、等価マルチルック数算出部600に、レーダ画像格納部1から読み込んだレーダ画像を入力する。そして、等価ルック数算出部600が、レーダ画像間の位相差、つまり、インターフェログラムを算出する。
【0045】
次に、ステップST610において、等価マルチルック数算出部600に設けられたフィルタリング処理部610が、レーダ画像から地形(地表面)の高さを求める処理において用いられる位相雑音を低減するためのフィルタをインターフェログラムに対して適用する。
【0046】
次に、ステップST620において、等価マルチルック数算出部600に設けられた位相誤差分布比較部620が、フィルタリング後のインターフェログラム内の各画素の位置(m,n)において、当該位置(m,n)を中心としたN個の画素からなる範囲の位相差の標準偏差を算出するとともに、同範囲のコヒーレンスを算出する。
【0047】
次に、ステップST621において、位相誤差分布比較部620が、インターフェログラムから算出した位相差の標準偏差とコヒーレンスとの関係を、理論式から得られる位相誤差とコヒーレンスの関係を示す曲線と比較する。この比較処理を、図5を用いて説明する。
【0048】
図5は、コヒーレンスと位相差の標準偏差の関係を表すグラフである。図において、○はステップST621において位相誤差分布比較部620がフィルタリング後のインターフェログラムから算出した、位置(m,n)における位相差の標準偏差とコヒーレンスをプロットした値(以下、データプロット点と呼ぶ)である。また、図中の曲線は、様々なマルチルック数nの下で、上記の式(4)に基づいて算出した、位相誤差とコヒーレンスの関係を示す曲線(以下、理論曲線と呼ぶ)である。なお、図5においては、マルチルック数nが、n=1,4,16の場合の理論曲線を示している。
【0049】
図5に示すように、データプロット点と、マルチルック数nに応じて異なる複数の理論曲線とを比較することにより、データプロット点に最も近い理論曲線を特定する。図5の例では、マルチルック数n=4のときの理論曲線が、各データプロット点に最も近い理論曲線である。そして、この理論曲線におけるマルチルック数nを、フィルタリング後のインターフェログラムのマルチルック数、すなわち、等価マルチルック数とする。この等価マルチルック数は、制御部100により、位相誤差計算部300へ入力され、ステップST300における式(4)を用いて位相誤差を算出する際のマルチルック数nとして取り扱われる。
【0050】
以降、実施の形態1で説明したステップST300,ST400,ST500,ST103と同一の処理を行う。
【0051】
以上のように、本実施の形態2によれば、上述した実施の形態1と同様の効果が得られるとともに、さらに、本実施の形態2においては、レーダ画像から地形(地表面)の高さを求める処理において用いられる、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を、前記式(3)で定義されるマルチルック処理の効果に換算して、この換算により得られた等価マルチルック数を用いて式(4)により位相雑音を算出しているので、位相雑音を低減するためのフィルタ処理の位相雑音効果を考慮して測高誤差の局所的な分布を算出することができる。
【0052】
また、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を、等価マルチルック数に換算して算出するようにしているので、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を定量的に表すことができる。
【図面の簡単な説明】
【0053】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示したブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置の処理の流れを示したフローチャートである。
【図3】この発明の実施の形態2に係るレーダ画像処理装置の構成を示したブロック図である。
【図4】この発明の実施の形態2に係るレーダ画像処理装置の処理の流れを示したフローチャートである。
【図5】この発明の実施の形態2に係るレーダ画像処理装置による画像処理の結果得られるコヒーレンスと位相差の標準偏差の関係を表すグラフを示した説明図である。
【符号の説明】
【0054】
1 レーダ画像格納部、2 観測・処理パラメータ格納部、3 測高誤差分布格納部、100 制御部、200 コヒーレンスマップ計算部、300 位相誤差計算部、400 位相標高感度計算部、500 測高誤差計算部、600 等価マルチルック数算出部、610 フィルタリング処理部、620 位相誤差分布比較部。
【技術分野】
【0001】
この発明はレーダ画像処理装置に関し、特に、地表等の観測を行う航空機や衛星に搭載されたレーダによって得られる画像の処理を行うためのレーダ画像処理装置に関する。
【背景技術】
【0002】
従来のレーダ画像処理装置は、送信局と受信局を分離して設けて構成するマルチスタティック方式で得られた、少なくとも2枚のレーダ画像の位相差から、位相差が地形の高さに応じた値を持つことを利用して、地形の高さを算出していた(例えば、特許文献1参照。)。
【0003】
【特許文献1】特開平11−125674号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来のレーダ画像処理装置は、少なくとも2枚のレーダ画像から算出した位相差が、地表面の状態(例えば、水面や森林部といった土地被覆の状態)に応じて誤差を持つことを考慮していないため、位相差から算出した地形の高さが持つ誤差を得ることができないという問題点があった。
【0005】
この結果、算出した地形の高さ分布、すなわち、成果物となる地形の高さを表す地図の精度を求めるためには、成果物と比較するための観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図を必要とするという問題点があった。
【0006】
また、比較するための観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図のデータがある地点では成果物の精度を求めることができるが、そのような情報やデータがない地点については成果物の精度を求めることができず、地形の高さが持つ誤差の2次元的な精度分布が得られないという問題があった。
【0007】
また、比較用のデータと成果物とを比較することにより得られる成果物の高さ精度は、レーダ画像から地形の高さを求めるための処理アルゴリズムで発生する処理上の誤差を含んだ精度となるため、レーダ画像から得られる地形高さの潜在的な精度を実現できないという問題点があった。
【0008】
この発明は上記のような問題点を解決するためになされたもので、1以上の受信局で観測された少なくとも2枚のレーダ画像を用いて算出した地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)を、観測対象領域内にある基準点の位置情報や他のセンサ等で得られた参照用の高さ地図を必要とせずに、レーダ画像から算出することができるレーダ画像処理装置を得ることを目的としている。
【課題を解決するための手段】
【0009】
この発明は、異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部とを備えたレーダ画像処理装置である。
【発明の効果】
【0010】
この発明は、異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部とを備えたレーダ画像処理装置であるので、1以上の受信局で観測された少なくとも2枚のレーダ画像を用いて算出した地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)を、観測対象領域内にある基準点の位置情報や他のセンサ等で得られた参照用の高さ地図を必要とせずに、レーダ画像から算出することができる。
【発明を実施するための最良の形態】
【0011】
実施の形態1.
図1はこの発明の実施の形態1におけるレーダ画像処理装置の構成を示すブロック構成図である。なお、本実施の形態1におけるレーダ画像処理装置は、送信局と受信局を分離して設けて構成するマルチスタティック方式で得られた少なくとも2枚のレーダ画像を用いて算出する地形の高さが持つ誤差の2次元的な分布(すなわち、高さの精度分布)をレーダ画像から算出するものである。
【0012】
図1において、レーダ画像格納部1は、異なる位置に設置された2以上の受信局で観測された複数のレーダ画像を格納する。なお、ここで格納されるレーダ画像は、画像間で対応する画素が地表面上における同一の点を示すよう位置あわせされた、レジストレーション処理済みの画像である。観測・処理パラメータ格納部2は、レーダ観測時のマイクロ波の波長や、アンテナの位置情報、レーダ画像から地形の高さを算出する処理において用いた各種処理パラメータ等を格納する。測高誤差分布格納部3は、この発明の実施の形態1の出力となる、地形の高さ算出誤差の分布を格納する。制御部100は、図1に示すように、コヒーレンスマップ計算部200と、位相誤差計算部300と、位相標高感度計算部400と、測高誤差計算部500とを備え、上述のレーダ画像格納部1、観測・処理パラメータ格納部2、測高誤差分布格納部3との間のデータの入出力、および、各部200〜500間のデータのやりとりを制御する。コヒーレンスマップ計算部200は、複数のレーダ画像間のコヒーレンスの分布、つまり、コヒーレンスマップを算出する。位相誤差計算部300は、コヒーレンスマップ計算部200で算出されたコヒーレンスと観測・処理パラメータ格納部2に格納されたパラメータとに基づき、レーダ画像間に含まれる位相誤差を算出する。位相標高感度計算部400は、観測・処理パラメータ格納部2に格納されたパラメータから、位相差の地形(地表面)の高さ変化に対する感度を計算する。標高誤差計算部500は、位相誤差計算部300と位相標高感度計算部400とで計算された値に基づき、位相誤差を高さ誤差に換算する。
【0013】
次に動作について説明する。
図2は、本実施の形態1によるレーダ画像処理装置の処理の流れを示すフローチャートである。
まず、ステップST101において、制御部100が、レーダ画像格納部1から、格納されている複数のレーダ画像を読み込む。
次に、ステップST102において、観測・処理パラメータ格納部2から、格納されているパラメータを読み込む。
次に、ステップST200において、制御部100がコヒーレンスマップ計算部200にレーダ画像を入力する。そして、コヒーレンスマップ計算部200が、レーダ画像中の各画素の位置(m,n)において、2枚のレーダ画像から、複素コヒーレンスρを算出する。この位置(m,n)における複素コヒーレンスρ(m,n)は下記の式(1)で表されるものである。
【0014】
【数1】
【0015】
ここで、s1,kは1枚目のレーダ画像における位置(m,n)を中心としたN個の画素がもつ複素データ値を示し、s2,kは2枚目のレーダ画像における位置(m,n)を中心としたN個の画素がもつ複素データ値を示す。個数Nは、位置(m,n)を中心とした複素コヒーレンスを計算する範囲に相当する。また、θは偏角を表す。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。*は複素共役を示す。ρは複素コヒーレンスの振幅であり、コヒーレンスと呼ばれる。このコヒーレンスρは、2枚のレーダ画像間の相関性を表し、0から1の間の値をとる。
【0016】
なお、ここでは、コヒーレンス計算に上記の式(1)で表されるコヒーレンスを用いたが、コヒーレンスの定義はこれに限られるものではなく、例えば、R. Touzi, A. Lopes, J. Bruniquel and P.W. Vachon, "Coherence estimation for SAR imagery", IEEE Transactions on Geoscience and Remote Sensing, Vol.37, No.1, pp.135-149, January 1999 等に記載されている定義式に基づいて算出しても良い。
【0017】
次に、コヒーレンスマップ計算部200は、こうして算出されたコヒーレンスρを用いて、それの2次元分布を算出する。以降、コヒーレンスρの2次元分布をコヒーレンスマップと呼ぶ。
【0018】
次に、ステップST300において、制御部100が、コヒーレンスマップ計算部200で算出されたコヒーレンスマップと、観測・処理パラメータ格納部2から読み込んだパラメータとを、位相誤差計算部300へ入力する。そして、位相誤差計算部300が、コヒーレンスマップを基に位相差の理論的な統計分布pn[Φ]を算出する。この理論的な統計分布(確率密度分布)は下記の式(2)で表されるものである。
【0019】
【数2】
【0020】
ここで、Φは位相差で、範囲は−πからπであり、nはマルチルック数、β=ρcos[Φ]である。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。また、Γはガンマ関数、Fはガウスの超幾何関数である。なお、このマルチルック数nは、インターフェログラムと呼ばれるレーダ画像間の位相差Φに対するマルチルック処理を下記の式(3)で定義する場合の、空間的平均に用いるデータ個数Nに相当する。
【0021】
【数3】
【0022】
ここで、Argは偏角を表すオペレータを示す。
【0023】
なお、上記の式(2)は、例えば、J.S.Lee, K.W.Hoppel, S.A.Mango, and A.R.Miller, "Intensity and Phase Statistics of Multilook Polarimetric and Interferometric SAR Imagery", IEEE Transactions on Geoscience and Remote Sensing, Vol.32, No.5, pp.1017-pp.1028, September 1994 等に記載されている。
【0024】
ここで、理論的な統計分布の算出には、上記の式(2)を用いたが、これに限るものではなく、位相差の統計分布を示すものであれば他の式を用いてもよい。
【0025】
次に、位相誤差計算部300が、上記の式(3)で求められたΦを用いて、下記の式(4)により、位相差の標準偏差σを算出し、この標準偏差σを位相誤差とする。
【0026】
【数4】
【0027】
なお、ここでは、上記の式(2)で統計分布pn[Φ]を算出し、式(4)で標準偏差σを算出するというように、2段階で位相誤差を算出したが、位相誤差の算出はこれに限るものではなく、例えば、事前にコヒーレンスと位相誤差の関係を定式化しておいて、この関係を用いることでコヒーレンスとマルチルック数から位相誤差を直接算出するようにしても良い。
【0028】
次に、ステップST400において、制御部100が、観測・処理パラメータ格納部2から読み込んだパラメータを、位相標高感度計算部400へ入力する。そして、位相標高感度計算部400が、下記の式(5)を用いて、地形(地表面)の高さ変化に対する位相差Φの変化の感度dh/dΦ(以下、位相標高感度dh/dΦと呼ぶ)を計算する。
【0029】
【数5】
【0030】
ここで、hは地形(地表面)の高さ、λはレーダ波の波長、γはアンテナから地表面までの距離である。また、kは観測方式に応じたパラメータであり、2開口同時観測の場合は1となり、1開口繰り返し観測の場合は2となる。また、Β⊥は基線長(アンテナ間の距離)のレーダ波の視線方向に垂直な成分、Θは地表面を平坦であると仮定した基準平面でのレーダ波の入射角を示す。これらのパラメータは、観測・処理パラメータ格納部2に記憶されている。
【0031】
次に、ステップST500において、制御部100が、位相誤差計算部300で算出された位相誤差σと位相標高感度計算部400で算出された位相標高感度dh/dΦとを、測高誤差計算部500に入力する。そして、前記測高誤差計算部500が、下記の式(6)を用いて、位相誤差σを地形の高さ誤差(測高誤差)Δhへ換算する。
【0032】
【数6】
【0033】
この地形の高さ誤差Δhの分布が、レーダ画像を用いて測った地形の高さの誤差分布、つまり、測高誤差分布となるので、測高誤差計算部500は、求めた地形の高さ誤差Δhから測高誤差分布を算出する。
【0034】
次に、ステップST103において、制御部100が、測高誤差計算部500で算出された測高誤差分布を、測高誤差分布格納部3へ出力する。
【0035】
以上のように、本実施の形態1においては、地形の高さ計測に用いる、実観測で得られたレーダ画像のコヒーレンスマップを求め、このコヒーレンスマップが示すコヒーレンスの値に基づいて測高誤差を算出するようにしているので、測高誤差の局所的な分布を算出することができる。
【0036】
また、実観測で得られたレーダ画像のコヒーレンスマップに基づいて測高誤差を算出するようにしているので、高さ誤差算出用に、観測対象領域内にある基準点の位置情報や、他のセンサ等で得られた参照用の高さ地図などを必要としない。
【0037】
また、実観測で得られたレーダ画像のコヒーレンスマップを2次元的な分布として用いて測高誤差を算出しているので、観測範囲における測高誤差を2次元的、つまり、面的に算出することができる。
【0038】
また、地表面の状態に応じて値が変化するコヒーレンスマップに基づいて測高誤差を算出するようにしているので、地表面上の状態に応じた測高誤差を算出することができ、レーダ画像から地形の高さを求めた結果の内で精度が保証できる範囲の情報を提供することができる。
【0039】
また、実観測で得られたレーダ画像のコヒーレンスマップに基づいて測高誤差を算出するようにしているので、レーダ画像から地形の高さを算出する際に用いられる処理アルゴリズムで発生する処理上の誤差を除いた、レーダ画像から得られる地形高さの潜在的な精度を算出することができる。
【0040】
実施の形態2.
上述の実施の形態1では、レーダ画像から地形の高さを求める処理において、インターフェログラムに対して位相雑音を低減するための上記の式(3)で定義されるマルチルック処理が行われる場合を想定したものであるが、本実施の形態2においては、このマルチルック処理以外の位相雑音を低減するためのフィルタが行われる場合に対処する実施の形態を示す。
【0041】
図3は、この発明の実施の形態2におけるレーダ画像処理装置の構成を示すブロック構成図である。図3において、図1と同一の符号を付したものは、同一またはこれに相当するものであるので説明を省略する。図3において、等価マルチルック数算出部600は、インターフェログラムの位相雑音フィルタの位相雑音低減効果をマルチルック数に換算するものであり、図3に示すように、フィルタリング処理部610と位相誤差分布比較部620とを備えている。
【0042】
次に動作について説明する。図4は、この実施の形態2によるレーダ画像処理装置の処理の流れを示すフローチャートである。図4において、図2と同一の符号を付したものは、同一またはこれに相当するものであるので、ここでは説明を省略する。すなわち、図4の処理においては、図2のステップST200とステップST300との間に、ステップST600,ST610,ST620,ST621の処理が追加されている点が異なる。本実施の形態2においては、追加されたこれらの処理を中心に説明することとする。
【0043】
本実施の形態2においては、図4に示すように、まず、実施の形態1で説明したステップST101,ST102,ST200と同一の処理を行う。
【0044】
次に、ステップST600において、制御部100が、等価マルチルック数算出部600に、レーダ画像格納部1から読み込んだレーダ画像を入力する。そして、等価ルック数算出部600が、レーダ画像間の位相差、つまり、インターフェログラムを算出する。
【0045】
次に、ステップST610において、等価マルチルック数算出部600に設けられたフィルタリング処理部610が、レーダ画像から地形(地表面)の高さを求める処理において用いられる位相雑音を低減するためのフィルタをインターフェログラムに対して適用する。
【0046】
次に、ステップST620において、等価マルチルック数算出部600に設けられた位相誤差分布比較部620が、フィルタリング後のインターフェログラム内の各画素の位置(m,n)において、当該位置(m,n)を中心としたN個の画素からなる範囲の位相差の標準偏差を算出するとともに、同範囲のコヒーレンスを算出する。
【0047】
次に、ステップST621において、位相誤差分布比較部620が、インターフェログラムから算出した位相差の標準偏差とコヒーレンスとの関係を、理論式から得られる位相誤差とコヒーレンスの関係を示す曲線と比較する。この比較処理を、図5を用いて説明する。
【0048】
図5は、コヒーレンスと位相差の標準偏差の関係を表すグラフである。図において、○はステップST621において位相誤差分布比較部620がフィルタリング後のインターフェログラムから算出した、位置(m,n)における位相差の標準偏差とコヒーレンスをプロットした値(以下、データプロット点と呼ぶ)である。また、図中の曲線は、様々なマルチルック数nの下で、上記の式(4)に基づいて算出した、位相誤差とコヒーレンスの関係を示す曲線(以下、理論曲線と呼ぶ)である。なお、図5においては、マルチルック数nが、n=1,4,16の場合の理論曲線を示している。
【0049】
図5に示すように、データプロット点と、マルチルック数nに応じて異なる複数の理論曲線とを比較することにより、データプロット点に最も近い理論曲線を特定する。図5の例では、マルチルック数n=4のときの理論曲線が、各データプロット点に最も近い理論曲線である。そして、この理論曲線におけるマルチルック数nを、フィルタリング後のインターフェログラムのマルチルック数、すなわち、等価マルチルック数とする。この等価マルチルック数は、制御部100により、位相誤差計算部300へ入力され、ステップST300における式(4)を用いて位相誤差を算出する際のマルチルック数nとして取り扱われる。
【0050】
以降、実施の形態1で説明したステップST300,ST400,ST500,ST103と同一の処理を行う。
【0051】
以上のように、本実施の形態2によれば、上述した実施の形態1と同様の効果が得られるとともに、さらに、本実施の形態2においては、レーダ画像から地形(地表面)の高さを求める処理において用いられる、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を、前記式(3)で定義されるマルチルック処理の効果に換算して、この換算により得られた等価マルチルック数を用いて式(4)により位相雑音を算出しているので、位相雑音を低減するためのフィルタ処理の位相雑音効果を考慮して測高誤差の局所的な分布を算出することができる。
【0052】
また、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を、等価マルチルック数に換算して算出するようにしているので、位相雑音を低減するためのフィルタ処理の位相雑音低減効果を定量的に表すことができる。
【図面の簡単な説明】
【0053】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示したブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置の処理の流れを示したフローチャートである。
【図3】この発明の実施の形態2に係るレーダ画像処理装置の構成を示したブロック図である。
【図4】この発明の実施の形態2に係るレーダ画像処理装置の処理の流れを示したフローチャートである。
【図5】この発明の実施の形態2に係るレーダ画像処理装置による画像処理の結果得られるコヒーレンスと位相差の標準偏差の関係を表すグラフを示した説明図である。
【符号の説明】
【0054】
1 レーダ画像格納部、2 観測・処理パラメータ格納部、3 測高誤差分布格納部、100 制御部、200 コヒーレンスマップ計算部、300 位相誤差計算部、400 位相標高感度計算部、500 測高誤差計算部、600 等価マルチルック数算出部、610 フィルタリング処理部、620 位相誤差分布比較部。
【特許請求の範囲】
【請求項1】
異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、
前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、
前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、
マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、
前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、
前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、
前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部と
を備えたことを特徴とするレーダ画像処理装置。
【請求項2】
前記位相誤差計算部は、前記マルチルック数と前記コヒーレンスマップの前記コヒーレンスとを変数とする理論的な位相差の確率密度分布に基づいて位相差の標準偏差を算出し、算出された位相差の標準偏差を前記位相誤差とすることを特徴とする請求項1に記載のレーダ画像処理装置。
【請求項3】
前記位相誤差計算部は、予め求められた、マルチルック数とコヒーレンスとを変数とした位相誤差を求める数式を用いて、前記位相誤差を算出することを特徴とする請求項1に記載のレーダ画像処理装置。
【請求項4】
インターフェログラムの位相雑音を低減するためのフィルタリング処理を行い、フィルタリング後のインターフェログラムから算出した位相差の標準偏差とコヒーレンスのプロット値と理論曲線とを比較して、最も近い理論曲線を特定して、当該理論曲線のマルチルック数を等価マルチルック数とする等価マルチルック数算出部をさらに備え、
前記位相誤差計算部は、前記等価マルチルック数算出部により求められた等価マルチルック数を前記位相誤差の算出におけるマルチルック数として用いて前記位相誤差を算出する
ことを特徴とする請求項1ないし3のいずれか1項に記載のレーダ画像処理装置。
【請求項1】
異なる位置に設置された受信局で観測され互いにレジストレーション処理された複数のレーダ画像を格納するレーダ画像格納部と、
前記観測時のレーダ波の波長及びアンテナの位置情報、前記レーダ画像間の位相差、及び、インターフェログラムに対するマルチルック処理のマルチルック数を含む、前記レーダ画像から地表面の高さを算出する処理において用いられたこれらの処理パラメータと、算出された地表面の高さとを格納する観測・処理パラメータ格納部と、
前記レーダ画像格納部に格納された前記レーダ画像間のコヒーレンスを求め、当該コヒーレンスの2次元分布であるコヒーレンスマップを求めるコヒーレンスマップ計算部と、
マルチルック数とコヒーレンスマップとに基づいて位相誤差を算出する位相誤差計算部と、
前記観測・処理パラメータ格納部に格納された前記地表面の高さの変化に対する前記レーダ画像間の位相差の変化の感度である位相標高感度を算出する位相標高感度計算部と、
前記位相誤差計算部によって算出された前記位相誤差に基づいて測高誤差を算出して、当該測高誤差の分布を求める測高誤差計算部と、
前記測高誤差計算部によって算出された前記測高誤差の分布を格納する測高誤差分布格納部と
を備えたことを特徴とするレーダ画像処理装置。
【請求項2】
前記位相誤差計算部は、前記マルチルック数と前記コヒーレンスマップの前記コヒーレンスとを変数とする理論的な位相差の確率密度分布に基づいて位相差の標準偏差を算出し、算出された位相差の標準偏差を前記位相誤差とすることを特徴とする請求項1に記載のレーダ画像処理装置。
【請求項3】
前記位相誤差計算部は、予め求められた、マルチルック数とコヒーレンスとを変数とした位相誤差を求める数式を用いて、前記位相誤差を算出することを特徴とする請求項1に記載のレーダ画像処理装置。
【請求項4】
インターフェログラムの位相雑音を低減するためのフィルタリング処理を行い、フィルタリング後のインターフェログラムから算出した位相差の標準偏差とコヒーレンスのプロット値と理論曲線とを比較して、最も近い理論曲線を特定して、当該理論曲線のマルチルック数を等価マルチルック数とする等価マルチルック数算出部をさらに備え、
前記位相誤差計算部は、前記等価マルチルック数算出部により求められた等価マルチルック数を前記位相誤差の算出におけるマルチルック数として用いて前記位相誤差を算出する
ことを特徴とする請求項1ないし3のいずれか1項に記載のレーダ画像処理装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2008−215935(P2008−215935A)
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願番号】特願2007−51491(P2007−51491)
【出願日】平成19年3月1日(2007.3.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年9月18日(2008.9.18)
【国際特許分類】
【出願日】平成19年3月1日(2007.3.1)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]