
レーダ画像処理装置
【課題】移動体に搭載されたレーダで所定領域を観測し、対象物を検出する時、従来は対象物の高度情報と反射強度を用いていたので、高度と反射強度が同程度の建物や車両等は区別できない。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
【解決手段】所定領域内の対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータを取得データ入力手段で取得し、取得データから3D画像作成処理手段で3次元画像を生成し、3次元画像中の所定領域を領域設定処理手段で抽出し、所定領域の画像データを用いて、高度断面図作成手段で高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を物体判定処理手段で行い、検出対象物体が存在する位置を表示手段が表示出力する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、移動体に搭載されたレーダにより、任意の領域を観測し、観測領域内の各観測地点におけるレーダとの距離値と、アジマス方向角度及びエレベーション方向角度から検出対象物を検出するレーダ画像処理装置に関する。
【背景技術】
【0002】
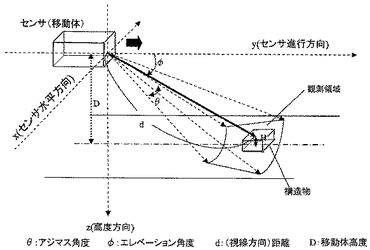
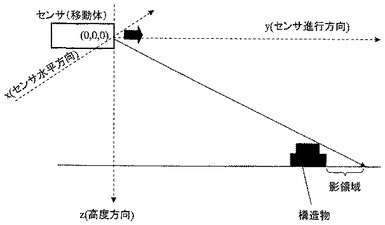
図1に示すように、移動体にレーザレーダを搭載し(以下、センサと表す)、レーザレーダの移動、及びレーザレーダからのビーム走査をしながら下方領域を観測する観測系の場合、ある検出対象物体を計測したときの、センサ高度をD、アジマス方向角度をθ、エレベーション方向角度をφ、センサからの(視線方向)距離をdとすると、検出対象物体の高度Hは式1により得ることができる。
【0003】
【数1】

【0004】
このようにして得られる高度情報と、反射強度情報を用いて人工構造物と自然構造物、及び、地面等を分類する手法が“レーザ計測システム・空中デジタルカメラを用いた森林・林業分野への活用方法”北海航空株式会社 業務紹介資料(非特許文献1)に記載されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】小林伸行、“レーザ計測システム・空中デジタルカメラを用いた森林・林業分野への活用方法”林業技術研究会技術発表、北海航空株式会社、2004 ;
【非特許文献2】N., Vandapel,,“Natural Terrain Classification using 3-D L,adar Data”, IEEE, 2004.
【非特許文献3】M., Ester, “A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise”, Published in Proceedings of 2nd International Conference.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記のような方法では、種類は異なるが、高度及び強度が同程度であるもの(例えば、建物や車両等の構造物)を区別することはできない。
この発明は上述のような課題を解決するためになされたもので、検出対象物と非検出対象物の高度及び反射強度が同程度の場合でも精度良く検出対象物のみを検出することができるレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
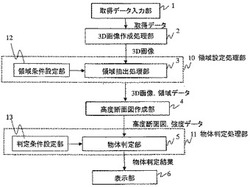
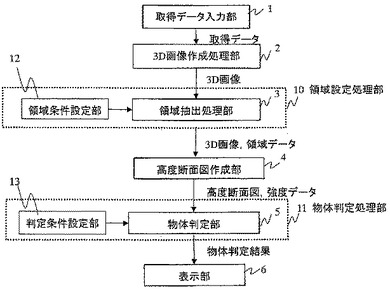
この発明に係るレーダ画像処理装置は、所定の観測領域内に存在する検出対象物体までのレーダとの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、上記3次元画像中の所定の領域を抽出する領域設定処理手段と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成手段と、上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理手段と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備える。
【発明の効果】
【0008】
この発明に係るレーダ画像処理装置によれば、対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータから3次元画像を生成し、3次元画像中の所定領域を抽出して、所定領域の画像データにより、高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を行うことにより、検出対象物と非検出対象物の高度及び反射強度が同程度の場合でも精度良く検出対象物のみを検出することができる。
【図面の簡単な説明】
【0009】
【図1】移動体に搭載のレーザレーダで下方領域を観測する観測系の説明図である。
【図2】この発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
【図3】実施の形態2によるレーダ画像処理装置の構成を示すブロック構成図である。
【図4】物体判定部の一構成例を示すブロック構成図である。
【図5】物体判定部の異なる構成例を示すブロック構成図である。
【図6】物体判定部のさらに異なる構成例を示すブロック構成図である。
【図7】作成された3次元画像を上方から見た平面図である。
【図8】構造物を照射するセンサビームの状態説明図である。
【図9】領域条件設定部で設定された解析領域の例を示す平面図である。
【図10】領域条件設定部で設定された他の解析領域の例を示す平面図である。
【図11】領域条件設定部で設定されたさらに他の解析領域の例を示す平面図である。
【図12】図9における解析領域Iでの高度距離分布図である。
【図13】図9における解析領域IIでの高度距離分布図である。
【図14】図9における解析領域III及びIVでの高度距離分布図である。
【図15】実施の形態2の認識部による認識処理の説明図である。
【図16】実施の形態2の認識部による認識処理結果の説明図である。
【図17】この発明の実施の形態3によるレーダ画像処理装置の構成を示すブロック構成図である。
【図18】実施の形態3による地上高度・強度算出部の一例を示すブロック構成図である。
【図19】実施の形態3による判定・地上モデル作成部によるウィンドウ内の地上高度決定処理の説明図である。
【図20】実施の形態3による地上強度算出部において抽出された地上強度の特性図である。
【図21】実施の形態3による物体領域決定処理部の一例を示すブロック構成図である。
【図22】この発明の実施の形態4によるレーダ画像処理装置の構成を示すブロック構成図である。
【図23】実施の形態4による物体候補領域抽出部の一例を示すブロック構成図である。
【図24】実施の形態4による全物体領域抽出処理部における処理例の概略説明図である。
【図25】実施の形態4による不要物体領域抽出部の処理例の概略説明図である。
【図26】実施の形態4による物体候補領域判定部の処理例の概略説明図である。
【図27】実施の形態4による観測環境低SNR下における物体候補領域判定部の抽出結果の概略説明図である。
【図28】実施の形態4による領域ラベリング部の処理例の概略説明図である。
【図29】実施の形態4による領域決定処理部の一例を示すブロック構成図である。
【図30】実施の形態4による総合判定部の処理例の概略説明図である。
【発明を実施するための形態】
【0010】
以下、この発明のレーダ画像処理装置の好適な実施の形態につき図面を用いて説明する。
【0011】
実施の形態1.
図2はこの発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
なお、この実施の形態では、任意の領域を観測するとともに、観測領域内の各観測地点の距離値と、そのアジマス方向角度及びエレベーション方向角度、並びに、反射強度値を得ることができるレーザレーダを対象に説明するがこの発明は、同様のデータが得られるものであれば、レーザレーダに限るものではない。
以下、図2に従い、その構成を説明する。
1は、観測領域における検出対象物との距離データ及びアジマス方向及びエレベーションの角度データを得る取得データ入力部、
2は、取得データ入力部1で得られた距離データ並びにアジマス方向及びエレベーション方向の角度データを用いて3次元画像を作成する3D画像作成処理部、
10は、物体判定処理を行う領域を切り出す領域設定処理部で、物体判定領域の諸元を指定する領域条件設定部12と、領域条件設定部12で指定された諸元に基づき画像を切り出す領域抽出処理部3を備える。
4は、領域設定処理部10で抽出された領域について、高度断面図を作成する高度断面作成部、
11は、規定の特徴量に基づき、物体の存在有無判定を行う物体判定処理部で、物体の存在有無判定を行うための特徴量や判定閾値等の設定を行う判定条件設定部13と、判定条件設定部13で設定された特徴量や閾値等により物体有領域の画素に判定値を付与する物体判定部5を備える。
6は、物体判定処理部11による各物体判定領域における判定結果を統合し、物体が存在する画像上の座標、及び、実空間における位置を表示する表示部である。
【0012】
次に動作について説明する。
取得データ入力部1では、観測領域の所定観測点における検出対象物へのビーム走査方向であるアジマス方向の角度とエレベーション方向の角度の角度データ、及びその角度におけるセンサとの距離データを取得する。また、同観測点における受信強度すなわち検出対象物からの反射強度データが得られる場合には、反射強度データも取得する。以下では、ここで得られるデータを取得データと呼ぶ。
【0013】
3D画像作成処理部2では、取得データ入力部1で得られたアジマス方向及びエレベーション方向の角度データ並びに距離データを用いて3次元画像を作成する。図1の観測系において、ある検出対象物の座標を(x、y、z)とすると、zすなわち検出対象物の高度は上述式1のHであり、高度方向に直交するx−y平面(水平面)内の座標x及びyは、式2により得ることができる。
【0014】
【数2】
【0015】
以上によって得られた観測領域内全ての座標(x、y、z)を、3次元画像の画素に当てはめることで3次元画像が作成される。
【0016】
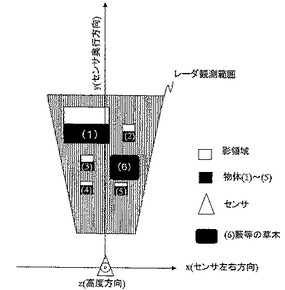
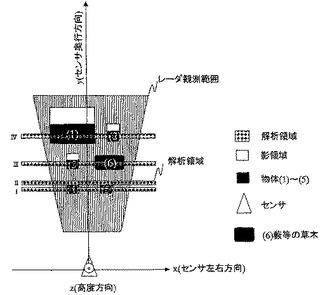
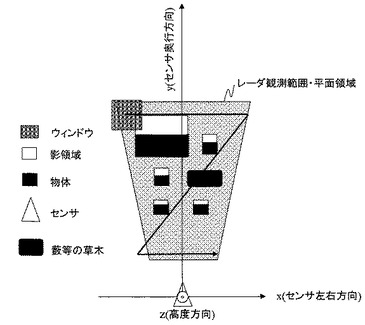
図7は、図1のような観測系で観測を行った結果から3D画像作成処理部2で3次元画像を作成し、それを上空(z軸方向)から地面(x−y平面)を見た図を示す。同図内(1)から(5)は車両や建物等の人工構造物、(6)は木や藪や地面の起伏等の自然構造物とし、すべて同程度の高度を持っているとする。以降では、(2)〜(5)を検出対象とする。また、同図において、(1)〜(5)に隣接する白い矩形領域は、図8に示すようにセンサからのビームが構造物に遮られて計測できない領域(以下、影領域と呼ぶ)を示す。センサのビームが90°以下の俯角で照射される場合には、このような影領域が生じる。
【0017】
次に、領域設定処理部10において、物体判定処理を行う領域(解析領域)を切り出す。以降の、高度断面図作成処理、及び物体判定処理は、この領域設定処理部10で切り出された領域に対して適用し、領域設定処理部10が切り出す領域を更新しながら観測領域すべてに対して物体判定処理が完了するまで繰り返す。領域条件設定部12では、領域の諸元(形状、大きさ、領域更新幅等)を指定し、領域抽出処理部3では、領域条件設定部12で指定された諸元に基づいて3次元画像中の当該画素領域を抽出する。
【0018】
領域条件設定部12で設定する解析領域の諸元としては、例えば、図9のように、x軸方向(センサ左右方向)の全ての画素と、y軸方向(レーダの基準方向であるセンサの進行方向、すなわちセンサの奥行方向)の所定の幅からなる画素で囲まれた帯状の解析領域を設定する条件を指定する。図9において、解析領域Iでは物体(4)と(5)を横切り、解析領域IIでは(4)と(5)の影領域を横切る。解析領域IIIでは物体(3)と藪等の草木(6)を横切り、解析領域IVでは物体(1)(非検出対象物)と物体(2)を横切る。このx軸方向全画素*y軸方向所定幅の帯状解析領域を設定する方法では、一回の処理に必要なメモリ量は、x軸方向の画素数と高度(z軸)方向の画素数とy軸方向所定幅分の画素数の積に比例するため、x軸方向の画素数がy軸方向の画素数よりも少ない場合には、次に記すy軸方向全画素*x軸方向所定幅の帯状解析領域を設定する方法よりも使用するメモリ量が小さくなるメリットがある。また、センサと検出対象物の位置関係もしくは姿勢から、例えば、x軸方向に検出対象物が等間隔に並んでいる場合や、x軸方向から見た検出対象物の大きさが常に一定である場合等のように、x軸方向に特徴を有する場合に効率良く物体検出ができるメリットがある。
【0019】
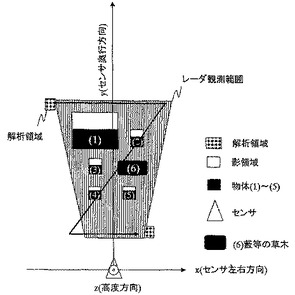
また、領域条件設定部12で指定する解析領域のその他の諸元として、図10のようにy軸方向の全ての画素と、x軸方向の所定の幅からなる画素で囲まれた帯状の解析領域を設定する条件を指定することもできる。このy軸方向全画素*x軸方向所定幅の解析領域を設定方法では、一回の処理に必要なメモリ量は、y軸方向の画素数と高度(z軸)方向の画素数とx軸方向所定幅分の画素数の積に比例するため、y軸方向の画素数がx軸方向の画素数よりも少ない場合には、上述で説明したx軸方向全画素*y軸方向所定幅の帯状解析領域を設定する方法よりも使用するメモリ量が小さくなるメリットがある。また、センサと検出対象物の位置関係もしくは姿勢から、例えば、y軸方向に検出対象物が等間隔に並んでいる場合や、y軸方向から見た検出対象物の大きさが常に一定である場合等のように、y軸方向に特徴を有する場合に効率良く物体検出ができるメリットがある。
【0020】
さらに、領域条件設定部12で指定する解析領域のその他の諸元として、図11のように解析領域を検出対象物のサイズや形状と等しくする条件を設定することもできる。この検出対象物のサイズや形状と等しい解析領域の設定方法では、検出対象物のサイズや形状が既知の場合には、最も効率の良い切り出しができるメリットがある。
【0021】
また、領域条件設定部12で指定する解析領域のその他の諸元として、上記3種類の方法を組み合わせることもできる。この方法によれば、例えば、x軸方向で特徴が得られるものについてはx軸方向全画素*y軸方向所定幅の帯状解析領域を設定方法で、y軸方向に特徴的なものはy軸方向全画素*x軸方向所定幅の解析領域を設定方法により検出できるため、より精度の高い検出ができるメリットがある。
また、例えば、最初にx軸方向全画素*y軸方向所定幅の帯状解析領域によりx軸方向の物体判定処理を行い、物体存在可能性が高い領域にのみy軸方向全画素*x軸方向所定幅の解析領域を設定もしくは検出対象物のサイズや形状と等しい解析領域の設定による方法を適用する場合には、探索領域が絞り込めるため演算量が少なくなる他、検出精度の向上も図れるメリットがある。
【0022】
また、上記3種類の方法における解析領域の幅の決め方として、検出対象物のサイズがある程度既知の場合で、かつ、領域を重複させずに解析領域を更新する場合には、検出対象物の大きさの1/2程度の幅にすると効率的な切り出しが可能である。
【0023】
次に、高度断面図作成部4において、各解析領域に対する検出対象物の高度断面図の1種である高度-左右方向長さ(以下幅と称す)分布図を作成する。図9の観測領域Iに対応する高度距離分布図を図12のIに、図9の観測領域IIに対応する高度距離分布図を図13のIIに、また、図9の観測領域IIIに対応する高度距離分布図を図14のIIIに、それぞれ示す。
【0024】
次に、物体判定処理部11において、所定の特徴量に基づき、物体の存在有無判定を行う。物体判定処理部11では、判定条件設定部13において、物体を判定する際の基準とする特徴量の選択や、判定閾値等の設定を行い、物体判定部5において、選択した特徴量に基づいて各解析領域の高度距離分布図中の画素を判定し、検出対象物と判定された画素に判定値を付与する。
【0025】
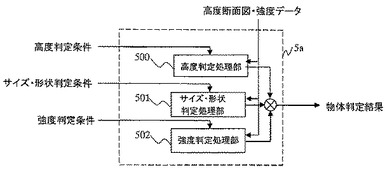
物体判定部5の一構成例を物体判定部5aとして図4に示す。図4では、高度距離分布図及び強度データとともに、高度判定条件として物体の高度値を入力とする高度判定処理部500、サイズ・形状判定条件として物体の大きさや形状を入力とするサイズ・形状判定処理部501、強度判定条件として物体の反射強度値を入力とする強度判定処理部502で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0026】
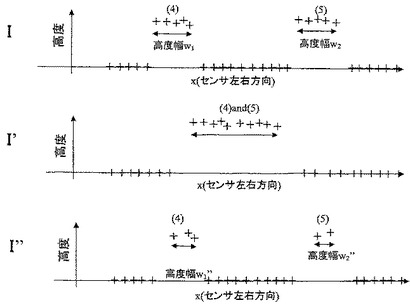
図12は、物体(4)と(5)を横切る領域での高度距離分布図を示している。図12のように、高さを有する物体は、高度距離分布図ではある幅W1及びW2を持って現れる。この構成による物体判定処理部11では、物体の高度値及び強度値の他に、物体のサイズや形状を用いて物体の判定を行っているため、異なる物体が同じ高度及び強度値を持っている場合でもそれらを異なるものとして判別することができる。更に、サイズや形状を条件として加味することで、例えば、物体が隣接している場合でも、物体のサイズの和を判定条件とすることで検出することができる。また、サイズ・形状の条件が不明な場合は、逆に、ここで判定された高度領域の大きさを物体のサイズ・形状と推定することもできる。
【0027】
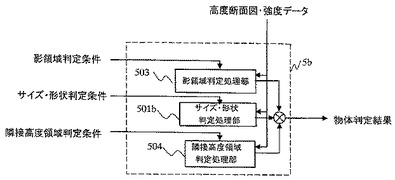
また、図5に物体判定部5の異なる構成例を物体判定部5bとして示す。図5は、物体判定部5bとして、高度距離分布図及び強度データとともに、影領域判定条件として物体の影領域の値を入力とする影領域判定処理部503、影領域のサイズ・形状判定条件として物体の影領域の大きさや形状を入力とするサイズ・形状判定処理部501b、隣接高度領域判定条件として影領域に隣接する画素の高度値を入力とする隣接高度領域判定処理部504で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0028】
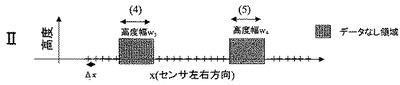
次に、動作について説明する。図13は、物体(4)と物体(5)の影領域を横切る領域での高度距離分布図を示している。構造物の背後には影領域、すなわち、データの得られない領域ができることから、データの得られていない領域を抽出することにより、物体を検出することができる。また、影領域の幅を見ることによって、構造物の幅w3やw4を推定することができる。
この方式によると、例えば図12のI''のように、受信信号の信号対雑音比が低いことに起因して構造物全てに対して高度情報が得られていない場合、w1''、w2''のように図12のIに示す本来の物体の幅よりも小さくなってしまう問題を解消することができる。これと対象物の大きさとの比較を行うことによって、検出を行わせることが可能である。影領域判定処理部503の機能は、図13のIIのデータ間の単位距離Δxを調べることによって影領域を認識・抽出する。影領域と判断するための単位距離Δxの大きさは任意である。先の処理を行って、物体と判断された画素または領域については、任意の点数を与えるまたはフラグを立てる。今回はx方向の帯のみで説明を行ったが、これを図10のy方向や図11の指定領域に対して行ってもよく、さらに組み合わせることも可能であり、例として、x方向の識別点数結果とy方向の識別点数結果の点数を加算して総合評価してもよい。影領域を用いた検出には、構造物の反射強度特性に依存せず用いることができることがメリットである。
【0029】
また、影領域のみを抽出するほかに、抽出した影領域候補の周辺に規定以上の高度領域が存在することを条件として付加してもよい。影領域が存在する箇所には必ず前面にビームを遮蔽する高度を持った構造物が存在するためである。このように判定を行うことで、単に信号対雑音比が低いために影領域となっている領域と、物体の高度のために影領域となっている領域を区別することができる。
【0030】
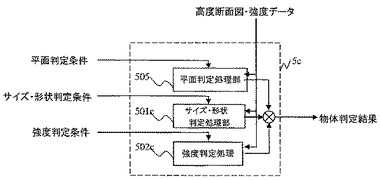
また、図6に物体判定部5のさらに異なる構成例を物体判定部5cとして示す。図6では、高度断面図及び強度データとともに、平面判定条件として物体の平面度条件を入力とする平面判定処理部505、影領域のサイズ・形状判定条件として物体の影領域の大きさや形状を入力とするサイズ・形状判定処理部501c、強度判定条件として物体の反射強度値を入力とする強度判定処理部502で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0031】
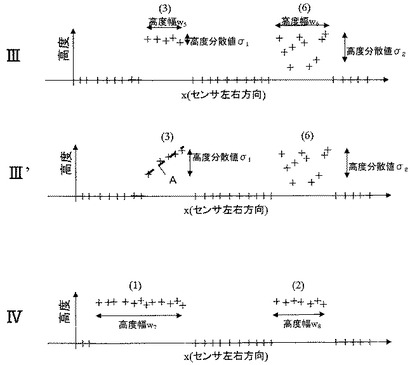
平面判定処理部505では、高度距離分布図を使用して画像中の平面部分を抽出する。図14に示す高度距離分布図において、球体以外の構造物では必ず平面が存在するため、その特性を用いる。平面度の判定には例えば、高度値の分散をとる方法がある。分散は下記の式3によって求められる。
【0032】
【数3】
【0033】
これにより、この分散値σを用いて任意分散閾値よりもσが小さい場合、その領域を平面とみなす。例えば、図14のIIIの物体(3)と藪(6)の分散値σを比較すると、(3)の方が明らかに小さいことがわかり、物体候補として取り上げることができる。これと同じ手法を用いて、地面の抽出も可能である。地面の領域は分散値が低いため、物体同様平面を抽出することができる。物体と地面との区分けは、高度で切り分けることができる。また、物体間の切り分けは上述したものの他に、(3)と(6)の高度幅w5、w6を用いる、または、(3)と(6)の間で地面が観測されることを条件としてもよい。
【0034】
平面判定処理部505では、上述した処理の他に、図14のIII'のA部のように、高度方向に勾配を持ち、また、分散値が高い場合(屋根等)も考えられる。このような状況も加味し、Δx間の高度差(Δz)を領域内で下記の式4のように加算する。
【0035】
【数4】
【0036】
また、その平面の傾きは解析領域内データを最小二乗法などによって近似線を書いて調べることができる。
【0037】
図14のIVのように、同じ高度を持った人工構造物(1)と人工構造物(2)を区別させるためには、高度幅w7、w8を用いる。上記それぞれの情報を用いれば、傾斜・高さ・幅によって、識別が可能となる。識別の方法は判定条件設定部13による対象とする人工構造物の傾斜・高さ・幅を用いる。さらに、抽出した平面と判定条件設定部13において設定した傾斜・高さ・幅の値を比較して、その合致割合に相応する点数をその画素または領域に対して与える。
【0038】
実施の形態2.
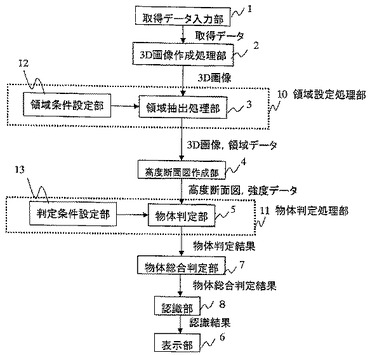
また、複数の判定条件をすべて満たす領域を抽出する方法の他に、各判定結果毎に点数付けをして、その値によって物体を抽出する実施の形態2による方法が考えられる。図3に実施の形態2のブロック構成図を示す。図3においては、図2に示す実施の形態1の構成に加え、物体総合判定部7と認識部8を備える。この物体総合判定部7と認識部8以外の構成は図2に示す実施の形態1と同様であるので、それらの説明は省略する。
物体総合判定部7は、物体判定処理部11において複数の判定処理によって与えられた各画素または領域における点数の総計を算出する。その結果により、対象の物体か否かを判定する。物体判定処理部11において、傾斜または高さ、幅に対してフラグを設け、そのフラグによって物体の種類を判定することも可能である。また、判定条件毎に重みを付け、点数を加算することも可能である。この方法によれば、抽出対象物を複数の点から評価することができる他、例えば、受信信号に含まれる雑音等により、ある判定条件では適切な判定がなされなかった領域でも、他の判定条件によって抽出が可能となり、検出精度の劣化を抑えることができる。
【0039】
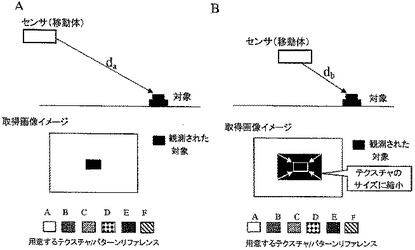
認識部8では、物体総合判定部7で対象の物体と判定検出された物体に対して、認識処理を行う。認識処理では、テクスチャ/パターンマッチングを行うものとする。認識部8は、認識を行う物体のテクスチャ/パターンの参照画像(リファレンス)を所持していることとする。図15Aのように遠方から物体の検出を行っている状態を基準とすると、図15Bのように物体にセンサが近づいた場合、観測される画像中の物体は大きくなる。この状態のままでマッチング処理を行うことは不可能であるため、参照画像のサイズに合わせて観測画像を縮小する。この際の縮小率は、図15Aにおいて視線方向の距離をda、図15Bにおいて視線方向の距離をdbとすると、 db/daで表される。逆に参照画像を観測画像サイズに拡大することも可能である。このように縮小/拡大した画像に対してマッチング処理を行う。
【0040】
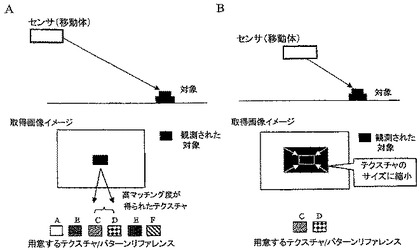
上述のように上記認識部8によるマッチング処理を行った結果、図16Aに示すように、所定の値よりも高いマッチング度を持つ候補参照画像(テクスチャ/パターン)が挙げられた場合は、図16Bに示すように、その候補参照画像(テクスチャ/パターン)のみを用いてその次に得られた、すなわち、距離が異なる画像に対してマッチング処理をかける。これにより、処理負荷の軽減が可能になると共に、リファレンス種類の絞込みによる認識精度の向上が挙げられる。以上の処理において認識された領域または輪郭を表示部6に受け渡す。
【0041】
なお、実施の形態1において、物体判定処理部11の後段に認識部8を備え、認識部8で認識された領域または輪郭を表示部6に受け渡す構成にしてもよい。また、実施の形態2において、認識部8を備えず、物体総合判定部7で対象の物体と判定検出された結果を表示部6に受け渡す構成でもよい。
【0042】
表示部6では、物体判定処理部11もしくは認識部8、あるいは物体総合判定部7において各画素または領域に与えられた点数またはフラグに応じてその画素または領域の画像上の座標及び実空間内での位置、およびテクスチャ/パターンを表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【0043】
実施の形態3.
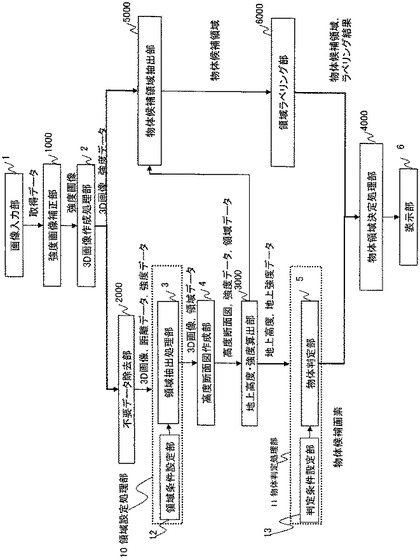
図17はこの発明の実施の形態3によるレーダ画像処理装置の構成を示すブロック構成図である。
以下、図17に従い、その構成を説明する。
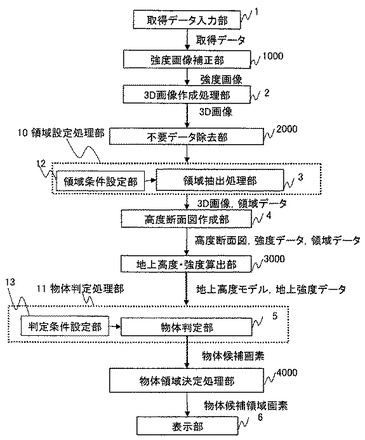
1000は、取得データ入力部1において入力された強度画像に対し、補正を行う強度画像補正部、
2000は、3D画像作成処理部2からの3次元画像についての入力データに対し、不要データを除去する不要データ除去部、
3000は、高度断面図作成部4で作成された、解析領域に対する検出対象物の高度断面図の1種である高度-左右方向長さ(以下幅と称す)分布図から地上の高度または強度を取り出す地上高度・強度算出部、
4000は、物体判定処理部11において、検出対象物と判定され、判定値を付与された各解析領域の高度距離分布図中の画素を基に、物体の存在する画素または領域を抽出する物体領域決定処理部である。
その他の構成は実施の形態1または2と同じ処理のものを備える。
【0044】
以下では、センサと観測領域の所定観測点との距離を画素値とした画像を距離画像、また、同観測点における受信強度すなわち検出対象物からの反射強度データが得られる場合には、それを強度画像と呼ぶこととする。
【0045】
強度画像補正部1000では、強度画像を補正するために、距離二乗補正を行う。これは、光源からの光の強さは光源からの距離の2乗に反比例するという物理現象に基づくものである。センサから観測対象への視線方向の距離をd、基準となる距離をdf、補正された強度をI’とすると補正の式は式5のように表される。
【0046】
【数5】
【0047】
本手法は、後段の物体判定部5において強度値を用いた判定を行う場合に有効であり、目標検出精度を向上させる効果がある。
【0048】
不要データ除去部2000では、所定高度以上のデータや、所定強度閾値以下のデータを除去する。これにより、目標検出の誤検出を抑止するメリットがある。
【0049】
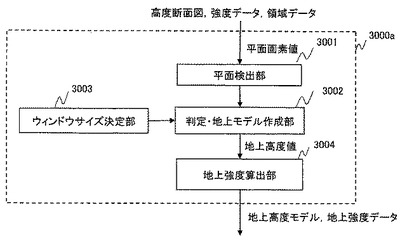
地上高度・強度算出部3000の一構成例を地上高度・強度算出部3000aとして図18に示す。図18では、領域設定処理部10において設定される領域データ内の高度値を用いて地上を検出するために平面を検出する平面検出部3001、所定サイズのウィンドウを設定するウィンドウサイズ決定部3003、ウィンドウサイズ決定部3003で設定されたウィンドウ内の検出平面が地上か否かの判定して、センサ観測領域の地上の高度モデルを作成する判定・地上モデル作成部3002、地上の反射強度値を算出する地上強度算出部3004で構成している例であり、地上の高度値と地上の反射強度値を出力する。
【0050】
平面検出部3001では、図6にて説明している平面判定部5cと同様の処理手法を用い、平面検出は高度のばらつきが小さい箇所を平面として検出する。その際、式3の高度標準偏差値を用いる。高度標分散値が任意高度内の場合、その領域または画素を平面として抽出する。
【0051】
平面検出部3001では、上記段落[0050]記載の手法の他に、非特許文献2の手法を用いてもよい。非特許文献2では、3次元座標点の分布のばらつきから平面度合を固有値を用いて算出している。また、3次元座標点群の最小二乗平面の法線ベクトルを用い、そのベクトルが地上に対して垂直方向の任意角度を持っている場合、その領域を平面として検出する。これを領域設定処理部10において設定される領域に適用することで、平面が抽出可能である。
【0052】
ウィンドウサイズ決定部3003において、所定サイズのウィンドウを設定する。さらに、判定・地上モデル作成部3002では、上記段落[0050]または[0051]において検出された平面検出結果に対し、図19のようにウィンドウを動かし、ウィンドウ内の最も高度が低い平面データをそのウィンドウ内の地上高度とする。この際、ウィンドウサイズは目標とするターゲットよりも大きくすることによって、目標上の平面部分を除去することができるメリットがある。本結果より、観測領域内の地面モデルを作成することができる。
【0053】
地上強度算出部3003では、判定・地上モデル作成部3002において抽出された地上からの反射による受信信号の強度値の平均または中央値等を地上の強度として抽出する。地上の強度値を選択する方法はこれに限ったものではない。
【0054】
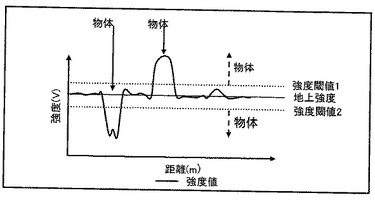
物体判定処理部11内の物体判定部5の構成は図4に示す実施の形態1と同様に高度判定処理部500、サイズ・形状判定処理部501及び強度判定処理部503で構成される。強度判定処理部503における強度判定処理に関しては、図4、図6に示す強度判定処理部における強度判定処理例として、単一強度閾値による検出が考えられるが、本実施の形態3においては、図20に示すような地上強度算出部3003において抽出した地上強度を用いた検出を行う。この地上強度を基準とした複数閾値を用いて閾値処理を行うことにより、背景よりも強度の高い目標と強度の低い目標どちらも抽出可能となる。
【0055】
高度判定処理部500では、判定・地上モデル作成部3002の結果である地上モデルを用いることにより、基準高度を地上に設定することができる。それにより、実際の物体高度を得ることができるため、より精度の高い高度判定処理を行うことができるメリットがある。
【0056】
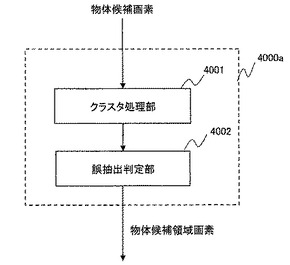
物体領域決定処理部4000では、物体判定処理部11において抽出された物体候補画素を入力とし、物体の存在する画素領域または3次元的な領域を出力する。その構成例を図21の4000aとして示す。図21では、物体領域決定処理部4000aは物体候補画素のクラスタ化を行うクラスタ処理部4001と、その結果から誤抽出を除去する誤抽出判定部4002で構成されている例であり、それぞれの条件をすべて満たす領域を検出対象物とし、物体領域判定結果として出力する。
【0057】
クラスタ処理部4001では、各画素の3次元座標値が近いデータを1つの物体としてみなす処理を行う。クラスタ化の処理の一例として、非特許文献3の手法が挙げられる。非特許文献3では、各点の3次元点座標値の距離を用いてクラスタ化を行う。
【0058】
誤抽出判定部4002では、クラスタ処理部4001の出力である各クラスタから物体だけを抽出する処理を行う。その一例として、クラスタの3次元的な大きさから目標とする物体の大きさに相当する物体のみを検出し、誤検出を除去し、その結果を出力する。
【0059】
表示部6では、誤抽出判定部4002において領域に与えられた領域または画像上の座標及び実空間内での位置を表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【0060】
実施の形態4.
本実施の形態では、反射強度が弱く、正しい距離データが数点のみしか得られない目標に関しても有効な目標検出処理手法を述べる。
【0061】
図22はこの発明の実施の形態4によるレーダ画像処理装置の構成を示すブロック構成図である。
以下、図22に従い、その構成を説明する。
5000は、地上高度・強度算出部3000により作成される高度データを用いて3D画像作成処理部2からの3D画像・強度データより物体の候補を抽出する物体候補領域抽出部、
6000は、物体候補領域抽出部5000で抽出された物体の候補をについて採番する領域ラベリング部である。
その他の構成および処理は実施の形態1または2または3と同じものを備える。本実施の形態では、地面は反射強度がある程度強く、正しいデータが取得できることを前提としている。すなわち、反射強度が弱く、信頼性のない距離データが得られている画素には任意高度を持つ物体が存在していることを前提とする。
【0062】
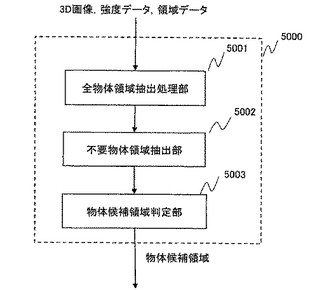
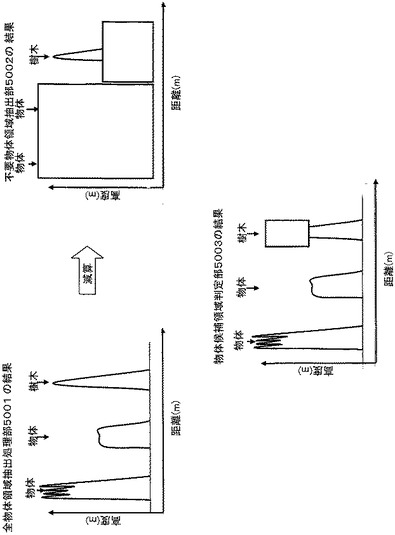
物体候補領域抽出部5000の一構成例を図23に示す。図23では、3D画像・強度データ、領域データを入力とし、全ての物体を抽出する全物体領域抽出処理部5001、全物体領域抽出処理部5001の出力の中でも不要なデータを除去する不要物体領域抽出部5002、所望の目標と想定される物体候補領域を抽出する物体候補領域判定部5003で構成されている例であり、物体の候補となる領域を出力する。
【0063】
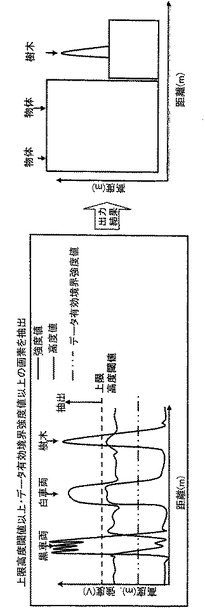
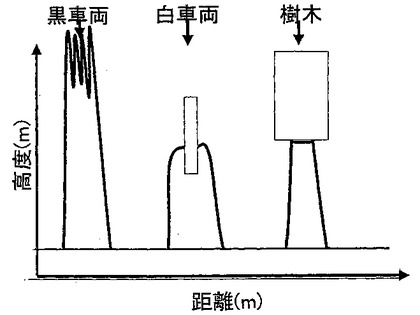
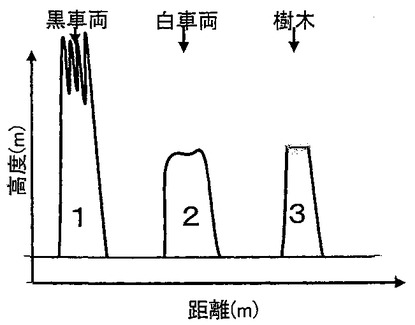
全物体領域抽出処理部5001の処理例として、図24に概略図を示す。高度・強度分布図と強度値の低い物体、強度値の高い物体、樹木が存在するとする。本処理は地上高度・強度算出部3000より得られる地上モデルを用いて基準高度を地上に設定している。ただし、基準高度を地上に設定できるものならば他手法でも構わない。地上を検出しない任意下限高度閾値を設定し、その下限高度閾値を超えた画素を抽出した結果を図24の右に示す。これにより、物体と自然物の高度情報を持つデータが抽出される。本処理に関して、エッジ検出などの画素値勾配を用いてもよく、領域を抽出できるものならばこれに限るものではない。
【0064】
不要物体領域抽出部5002の処理例として、図25に概略図を示す。データ有効境界強度値とは、距離値が正確に取得できる反射強度の境界値を表す。すなわち、本境界強度値以上あれば、正しい距離値が得られるため、この強度値以下の距離データは誤検出が発生する。本処理では、強度値がデータ有効境界強度値以上で、任意上限高度閾値以上の、真に高度が高いデータのみを抽出し、誤検出によって高い高度のデータが取得されている場合は抽出対象外とする。上限高度閾値は検出したい物体の高度よりも大きくすることとする。
【0065】
物体候補領域判定部5003の処理例として、図26に概略図を示す。全物体領域抽出処理部5001の結果から不要物体領域抽出部5002の結果を減算することにより、樹木のような真に高度が高い情報を削除することができる。これにより、目標のデータを削除することなく、誤検出を抑止できる不要データ除去が可能となる。
【0066】
物体候補領域判定部5003において抽出された各領域に対して、低SNR下における観測環境では、図27の白車両部のように穴が開く場合も考えられる。これは、車両のフロントガラス等、部分的に反射強度が低くなる状況が発生するためである。物体候補領域判定部5003では、その間を補間する処理も行う。その手法として、2次元画像上において物体候補領域として判定された画素で囲まれた画素は物体候補として領域を埋めるものである。ただし、正しいデータが取得できる高SNR下における観測においては、本処理を行う必要はない。
【0067】
領域ラベリング部6000の処理例として、図28に概略図を示す。物体候補領域判定部5003において抽出された各領域に対して、番号をつけ、物体候補領域とラベリング結果を出力する。
【0068】
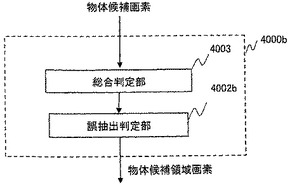
領域決定処理部4000の一構成例を図29に4000bとして示す。図29では、領域決定処理部4000bは、物体判定処理部11によって出力される物体候補画素と、領域ラベリング部6000によって出力される物体候補領域とラベリング結果を入力とし、入力の論理積をとることにより、目標候補領域を選定する総合判定部4003と、その結果から誤抽出を除去する誤抽出判定部4002bで構成されている例であり、それぞれの条件をすべて満たす領域を検出対象物とし、物体領域判定結果として出力する。
【0069】
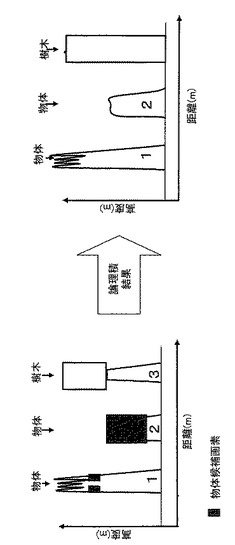
総合判定部4003の処理例を図30に示す。物体判定処理部11の出力である物体候補画素、領域ラベリング部6000の結果であるラベリング結果と、物体候補領域の画素を入力とし、その結果の論理積をとる。これにより、図30右のように、物体のみの抽出を可能としつつ、目標の形状を全て抽出することができる。本処理により、物体特有の形状を出力することが可能となる。
【0070】
誤検出判定部4002bでは、ラベリング処理部6000によって振り分けられた番号ごとに3次元的な大きさを見積り、その大きさが目標と類似しているもののみを抽出し、その結果である番号と物体候補領域画素を出力する。
【0071】
表示部6では、誤抽出判定部4002において領域に与えられた物体候補領域画素または画像上の座標及び実空間内での位置を表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【産業上の利用可能性】
【0072】
この発明によるレーダ画像処理装置は航空機から地上に向けてレーダビームを放射し地表面や人工構造物で反射し戻ったビームから3次元デジタルデータを取得し、検出対象物を検出するシステムなどへの適用が可能である。
【符号の説明】
【0073】
1;取得データ入力部、2;3D画像作成処理部、3;領域抽出処理部、4;高度断面作成部、5;物体判定部、6;表示部、7;物体総合判定部、8;認識部、10;領域設定処理部、11;物体判定処理部、12;領域条件設定部、13;判定条件設定部、500;高度判定処理部、501、501b、501c;サイズ・形状判定処理部、502;強度判定処理部、503;影領域判定処理部、504;隣接高度領域判定処理部、505;平面判定処理部、1000;強度画像補正部、2000;不要データ除去部、3000;地上高度・強度算出部、3001;平面検出部、3002;判定・地上モデル作成部、3003;ウィンドウサイズ決定部、3004;地上強度算出部、4000;物体領域決定処理部、4001;クラスタ処理部、4002;誤抽出判定部、4003;総合判定部、4002b;誤抽出判定部、5000;物体候補領域抽出部、5001;全物体領域抽出処理部、5002;不要物体領域抽出部、5003;物体候補領域判定部、6000;領域ラベリング部。
【技術分野】
【0001】
この発明は、移動体に搭載されたレーダにより、任意の領域を観測し、観測領域内の各観測地点におけるレーダとの距離値と、アジマス方向角度及びエレベーション方向角度から検出対象物を検出するレーダ画像処理装置に関する。
【背景技術】
【0002】
図1に示すように、移動体にレーザレーダを搭載し(以下、センサと表す)、レーザレーダの移動、及びレーザレーダからのビーム走査をしながら下方領域を観測する観測系の場合、ある検出対象物体を計測したときの、センサ高度をD、アジマス方向角度をθ、エレベーション方向角度をφ、センサからの(視線方向)距離をdとすると、検出対象物体の高度Hは式1により得ることができる。
【0003】
【数1】
【0004】
このようにして得られる高度情報と、反射強度情報を用いて人工構造物と自然構造物、及び、地面等を分類する手法が“レーザ計測システム・空中デジタルカメラを用いた森林・林業分野への活用方法”北海航空株式会社 業務紹介資料(非特許文献1)に記載されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】小林伸行、“レーザ計測システム・空中デジタルカメラを用いた森林・林業分野への活用方法”林業技術研究会技術発表、北海航空株式会社、2004 ;
【非特許文献2】N., Vandapel,,“Natural Terrain Classification using 3-D L,adar Data”, IEEE, 2004.
【非特許文献3】M., Ester, “A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise”, Published in Proceedings of 2nd International Conference.
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記のような方法では、種類は異なるが、高度及び強度が同程度であるもの(例えば、建物や車両等の構造物)を区別することはできない。
この発明は上述のような課題を解決するためになされたもので、検出対象物と非検出対象物の高度及び反射強度が同程度の場合でも精度良く検出対象物のみを検出することができるレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係るレーダ画像処理装置は、所定の観測領域内に存在する検出対象物体までのレーダとの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、上記3次元画像中の所定の領域を抽出する領域設定処理手段と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成手段と、上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理手段と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備える。
【発明の効果】
【0008】
この発明に係るレーダ画像処理装置によれば、対象物体までの距離と、そのアジマス方向とエレベーション方向の角度のデータから3次元画像を生成し、3次元画像中の所定領域を抽出して、所定領域の画像データにより、高度断面図を作成し、高度断面図に検出対象物体が存在するかの判定を行うことにより、検出対象物と非検出対象物の高度及び反射強度が同程度の場合でも精度良く検出対象物のみを検出することができる。
【図面の簡単な説明】
【0009】
【図1】移動体に搭載のレーザレーダで下方領域を観測する観測系の説明図である。
【図2】この発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
【図3】実施の形態2によるレーダ画像処理装置の構成を示すブロック構成図である。
【図4】物体判定部の一構成例を示すブロック構成図である。
【図5】物体判定部の異なる構成例を示すブロック構成図である。
【図6】物体判定部のさらに異なる構成例を示すブロック構成図である。
【図7】作成された3次元画像を上方から見た平面図である。
【図8】構造物を照射するセンサビームの状態説明図である。
【図9】領域条件設定部で設定された解析領域の例を示す平面図である。
【図10】領域条件設定部で設定された他の解析領域の例を示す平面図である。
【図11】領域条件設定部で設定されたさらに他の解析領域の例を示す平面図である。
【図12】図9における解析領域Iでの高度距離分布図である。
【図13】図9における解析領域IIでの高度距離分布図である。
【図14】図9における解析領域III及びIVでの高度距離分布図である。
【図15】実施の形態2の認識部による認識処理の説明図である。
【図16】実施の形態2の認識部による認識処理結果の説明図である。
【図17】この発明の実施の形態3によるレーダ画像処理装置の構成を示すブロック構成図である。
【図18】実施の形態3による地上高度・強度算出部の一例を示すブロック構成図である。
【図19】実施の形態3による判定・地上モデル作成部によるウィンドウ内の地上高度決定処理の説明図である。
【図20】実施の形態3による地上強度算出部において抽出された地上強度の特性図である。
【図21】実施の形態3による物体領域決定処理部の一例を示すブロック構成図である。
【図22】この発明の実施の形態4によるレーダ画像処理装置の構成を示すブロック構成図である。
【図23】実施の形態4による物体候補領域抽出部の一例を示すブロック構成図である。
【図24】実施の形態4による全物体領域抽出処理部における処理例の概略説明図である。
【図25】実施の形態4による不要物体領域抽出部の処理例の概略説明図である。
【図26】実施の形態4による物体候補領域判定部の処理例の概略説明図である。
【図27】実施の形態4による観測環境低SNR下における物体候補領域判定部の抽出結果の概略説明図である。
【図28】実施の形態4による領域ラベリング部の処理例の概略説明図である。
【図29】実施の形態4による領域決定処理部の一例を示すブロック構成図である。
【図30】実施の形態4による総合判定部の処理例の概略説明図である。
【発明を実施するための形態】
【0010】
以下、この発明のレーダ画像処理装置の好適な実施の形態につき図面を用いて説明する。
【0011】
実施の形態1.
図2はこの発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
なお、この実施の形態では、任意の領域を観測するとともに、観測領域内の各観測地点の距離値と、そのアジマス方向角度及びエレベーション方向角度、並びに、反射強度値を得ることができるレーザレーダを対象に説明するがこの発明は、同様のデータが得られるものであれば、レーザレーダに限るものではない。
以下、図2に従い、その構成を説明する。
1は、観測領域における検出対象物との距離データ及びアジマス方向及びエレベーションの角度データを得る取得データ入力部、
2は、取得データ入力部1で得られた距離データ並びにアジマス方向及びエレベーション方向の角度データを用いて3次元画像を作成する3D画像作成処理部、
10は、物体判定処理を行う領域を切り出す領域設定処理部で、物体判定領域の諸元を指定する領域条件設定部12と、領域条件設定部12で指定された諸元に基づき画像を切り出す領域抽出処理部3を備える。
4は、領域設定処理部10で抽出された領域について、高度断面図を作成する高度断面作成部、
11は、規定の特徴量に基づき、物体の存在有無判定を行う物体判定処理部で、物体の存在有無判定を行うための特徴量や判定閾値等の設定を行う判定条件設定部13と、判定条件設定部13で設定された特徴量や閾値等により物体有領域の画素に判定値を付与する物体判定部5を備える。
6は、物体判定処理部11による各物体判定領域における判定結果を統合し、物体が存在する画像上の座標、及び、実空間における位置を表示する表示部である。
【0012】
次に動作について説明する。
取得データ入力部1では、観測領域の所定観測点における検出対象物へのビーム走査方向であるアジマス方向の角度とエレベーション方向の角度の角度データ、及びその角度におけるセンサとの距離データを取得する。また、同観測点における受信強度すなわち検出対象物からの反射強度データが得られる場合には、反射強度データも取得する。以下では、ここで得られるデータを取得データと呼ぶ。
【0013】
3D画像作成処理部2では、取得データ入力部1で得られたアジマス方向及びエレベーション方向の角度データ並びに距離データを用いて3次元画像を作成する。図1の観測系において、ある検出対象物の座標を(x、y、z)とすると、zすなわち検出対象物の高度は上述式1のHであり、高度方向に直交するx−y平面(水平面)内の座標x及びyは、式2により得ることができる。
【0014】
【数2】
【0015】
以上によって得られた観測領域内全ての座標(x、y、z)を、3次元画像の画素に当てはめることで3次元画像が作成される。
【0016】
図7は、図1のような観測系で観測を行った結果から3D画像作成処理部2で3次元画像を作成し、それを上空(z軸方向)から地面(x−y平面)を見た図を示す。同図内(1)から(5)は車両や建物等の人工構造物、(6)は木や藪や地面の起伏等の自然構造物とし、すべて同程度の高度を持っているとする。以降では、(2)〜(5)を検出対象とする。また、同図において、(1)〜(5)に隣接する白い矩形領域は、図8に示すようにセンサからのビームが構造物に遮られて計測できない領域(以下、影領域と呼ぶ)を示す。センサのビームが90°以下の俯角で照射される場合には、このような影領域が生じる。
【0017】
次に、領域設定処理部10において、物体判定処理を行う領域(解析領域)を切り出す。以降の、高度断面図作成処理、及び物体判定処理は、この領域設定処理部10で切り出された領域に対して適用し、領域設定処理部10が切り出す領域を更新しながら観測領域すべてに対して物体判定処理が完了するまで繰り返す。領域条件設定部12では、領域の諸元(形状、大きさ、領域更新幅等)を指定し、領域抽出処理部3では、領域条件設定部12で指定された諸元に基づいて3次元画像中の当該画素領域を抽出する。
【0018】
領域条件設定部12で設定する解析領域の諸元としては、例えば、図9のように、x軸方向(センサ左右方向)の全ての画素と、y軸方向(レーダの基準方向であるセンサの進行方向、すなわちセンサの奥行方向)の所定の幅からなる画素で囲まれた帯状の解析領域を設定する条件を指定する。図9において、解析領域Iでは物体(4)と(5)を横切り、解析領域IIでは(4)と(5)の影領域を横切る。解析領域IIIでは物体(3)と藪等の草木(6)を横切り、解析領域IVでは物体(1)(非検出対象物)と物体(2)を横切る。このx軸方向全画素*y軸方向所定幅の帯状解析領域を設定する方法では、一回の処理に必要なメモリ量は、x軸方向の画素数と高度(z軸)方向の画素数とy軸方向所定幅分の画素数の積に比例するため、x軸方向の画素数がy軸方向の画素数よりも少ない場合には、次に記すy軸方向全画素*x軸方向所定幅の帯状解析領域を設定する方法よりも使用するメモリ量が小さくなるメリットがある。また、センサと検出対象物の位置関係もしくは姿勢から、例えば、x軸方向に検出対象物が等間隔に並んでいる場合や、x軸方向から見た検出対象物の大きさが常に一定である場合等のように、x軸方向に特徴を有する場合に効率良く物体検出ができるメリットがある。
【0019】
また、領域条件設定部12で指定する解析領域のその他の諸元として、図10のようにy軸方向の全ての画素と、x軸方向の所定の幅からなる画素で囲まれた帯状の解析領域を設定する条件を指定することもできる。このy軸方向全画素*x軸方向所定幅の解析領域を設定方法では、一回の処理に必要なメモリ量は、y軸方向の画素数と高度(z軸)方向の画素数とx軸方向所定幅分の画素数の積に比例するため、y軸方向の画素数がx軸方向の画素数よりも少ない場合には、上述で説明したx軸方向全画素*y軸方向所定幅の帯状解析領域を設定する方法よりも使用するメモリ量が小さくなるメリットがある。また、センサと検出対象物の位置関係もしくは姿勢から、例えば、y軸方向に検出対象物が等間隔に並んでいる場合や、y軸方向から見た検出対象物の大きさが常に一定である場合等のように、y軸方向に特徴を有する場合に効率良く物体検出ができるメリットがある。
【0020】
さらに、領域条件設定部12で指定する解析領域のその他の諸元として、図11のように解析領域を検出対象物のサイズや形状と等しくする条件を設定することもできる。この検出対象物のサイズや形状と等しい解析領域の設定方法では、検出対象物のサイズや形状が既知の場合には、最も効率の良い切り出しができるメリットがある。
【0021】
また、領域条件設定部12で指定する解析領域のその他の諸元として、上記3種類の方法を組み合わせることもできる。この方法によれば、例えば、x軸方向で特徴が得られるものについてはx軸方向全画素*y軸方向所定幅の帯状解析領域を設定方法で、y軸方向に特徴的なものはy軸方向全画素*x軸方向所定幅の解析領域を設定方法により検出できるため、より精度の高い検出ができるメリットがある。
また、例えば、最初にx軸方向全画素*y軸方向所定幅の帯状解析領域によりx軸方向の物体判定処理を行い、物体存在可能性が高い領域にのみy軸方向全画素*x軸方向所定幅の解析領域を設定もしくは検出対象物のサイズや形状と等しい解析領域の設定による方法を適用する場合には、探索領域が絞り込めるため演算量が少なくなる他、検出精度の向上も図れるメリットがある。
【0022】
また、上記3種類の方法における解析領域の幅の決め方として、検出対象物のサイズがある程度既知の場合で、かつ、領域を重複させずに解析領域を更新する場合には、検出対象物の大きさの1/2程度の幅にすると効率的な切り出しが可能である。
【0023】
次に、高度断面図作成部4において、各解析領域に対する検出対象物の高度断面図の1種である高度-左右方向長さ(以下幅と称す)分布図を作成する。図9の観測領域Iに対応する高度距離分布図を図12のIに、図9の観測領域IIに対応する高度距離分布図を図13のIIに、また、図9の観測領域IIIに対応する高度距離分布図を図14のIIIに、それぞれ示す。
【0024】
次に、物体判定処理部11において、所定の特徴量に基づき、物体の存在有無判定を行う。物体判定処理部11では、判定条件設定部13において、物体を判定する際の基準とする特徴量の選択や、判定閾値等の設定を行い、物体判定部5において、選択した特徴量に基づいて各解析領域の高度距離分布図中の画素を判定し、検出対象物と判定された画素に判定値を付与する。
【0025】
物体判定部5の一構成例を物体判定部5aとして図4に示す。図4では、高度距離分布図及び強度データとともに、高度判定条件として物体の高度値を入力とする高度判定処理部500、サイズ・形状判定条件として物体の大きさや形状を入力とするサイズ・形状判定処理部501、強度判定条件として物体の反射強度値を入力とする強度判定処理部502で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0026】
図12は、物体(4)と(5)を横切る領域での高度距離分布図を示している。図12のように、高さを有する物体は、高度距離分布図ではある幅W1及びW2を持って現れる。この構成による物体判定処理部11では、物体の高度値及び強度値の他に、物体のサイズや形状を用いて物体の判定を行っているため、異なる物体が同じ高度及び強度値を持っている場合でもそれらを異なるものとして判別することができる。更に、サイズや形状を条件として加味することで、例えば、物体が隣接している場合でも、物体のサイズの和を判定条件とすることで検出することができる。また、サイズ・形状の条件が不明な場合は、逆に、ここで判定された高度領域の大きさを物体のサイズ・形状と推定することもできる。
【0027】
また、図5に物体判定部5の異なる構成例を物体判定部5bとして示す。図5は、物体判定部5bとして、高度距離分布図及び強度データとともに、影領域判定条件として物体の影領域の値を入力とする影領域判定処理部503、影領域のサイズ・形状判定条件として物体の影領域の大きさや形状を入力とするサイズ・形状判定処理部501b、隣接高度領域判定条件として影領域に隣接する画素の高度値を入力とする隣接高度領域判定処理部504で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0028】
次に、動作について説明する。図13は、物体(4)と物体(5)の影領域を横切る領域での高度距離分布図を示している。構造物の背後には影領域、すなわち、データの得られない領域ができることから、データの得られていない領域を抽出することにより、物体を検出することができる。また、影領域の幅を見ることによって、構造物の幅w3やw4を推定することができる。
この方式によると、例えば図12のI''のように、受信信号の信号対雑音比が低いことに起因して構造物全てに対して高度情報が得られていない場合、w1''、w2''のように図12のIに示す本来の物体の幅よりも小さくなってしまう問題を解消することができる。これと対象物の大きさとの比較を行うことによって、検出を行わせることが可能である。影領域判定処理部503の機能は、図13のIIのデータ間の単位距離Δxを調べることによって影領域を認識・抽出する。影領域と判断するための単位距離Δxの大きさは任意である。先の処理を行って、物体と判断された画素または領域については、任意の点数を与えるまたはフラグを立てる。今回はx方向の帯のみで説明を行ったが、これを図10のy方向や図11の指定領域に対して行ってもよく、さらに組み合わせることも可能であり、例として、x方向の識別点数結果とy方向の識別点数結果の点数を加算して総合評価してもよい。影領域を用いた検出には、構造物の反射強度特性に依存せず用いることができることがメリットである。
【0029】
また、影領域のみを抽出するほかに、抽出した影領域候補の周辺に規定以上の高度領域が存在することを条件として付加してもよい。影領域が存在する箇所には必ず前面にビームを遮蔽する高度を持った構造物が存在するためである。このように判定を行うことで、単に信号対雑音比が低いために影領域となっている領域と、物体の高度のために影領域となっている領域を区別することができる。
【0030】
また、図6に物体判定部5のさらに異なる構成例を物体判定部5cとして示す。図6では、高度断面図及び強度データとともに、平面判定条件として物体の平面度条件を入力とする平面判定処理部505、影領域のサイズ・形状判定条件として物体の影領域の大きさや形状を入力とするサイズ・形状判定処理部501c、強度判定条件として物体の反射強度値を入力とする強度判定処理部502で構成している例であり、それぞれの条件をすべて満たす画素を検出対象物とし、物体判定結果として出力する。
【0031】
平面判定処理部505では、高度距離分布図を使用して画像中の平面部分を抽出する。図14に示す高度距離分布図において、球体以外の構造物では必ず平面が存在するため、その特性を用いる。平面度の判定には例えば、高度値の分散をとる方法がある。分散は下記の式3によって求められる。
【0032】
【数3】
【0033】
これにより、この分散値σを用いて任意分散閾値よりもσが小さい場合、その領域を平面とみなす。例えば、図14のIIIの物体(3)と藪(6)の分散値σを比較すると、(3)の方が明らかに小さいことがわかり、物体候補として取り上げることができる。これと同じ手法を用いて、地面の抽出も可能である。地面の領域は分散値が低いため、物体同様平面を抽出することができる。物体と地面との区分けは、高度で切り分けることができる。また、物体間の切り分けは上述したものの他に、(3)と(6)の高度幅w5、w6を用いる、または、(3)と(6)の間で地面が観測されることを条件としてもよい。
【0034】
平面判定処理部505では、上述した処理の他に、図14のIII'のA部のように、高度方向に勾配を持ち、また、分散値が高い場合(屋根等)も考えられる。このような状況も加味し、Δx間の高度差(Δz)を領域内で下記の式4のように加算する。
【0035】
【数4】
【0036】
また、その平面の傾きは解析領域内データを最小二乗法などによって近似線を書いて調べることができる。
【0037】
図14のIVのように、同じ高度を持った人工構造物(1)と人工構造物(2)を区別させるためには、高度幅w7、w8を用いる。上記それぞれの情報を用いれば、傾斜・高さ・幅によって、識別が可能となる。識別の方法は判定条件設定部13による対象とする人工構造物の傾斜・高さ・幅を用いる。さらに、抽出した平面と判定条件設定部13において設定した傾斜・高さ・幅の値を比較して、その合致割合に相応する点数をその画素または領域に対して与える。
【0038】
実施の形態2.
また、複数の判定条件をすべて満たす領域を抽出する方法の他に、各判定結果毎に点数付けをして、その値によって物体を抽出する実施の形態2による方法が考えられる。図3に実施の形態2のブロック構成図を示す。図3においては、図2に示す実施の形態1の構成に加え、物体総合判定部7と認識部8を備える。この物体総合判定部7と認識部8以外の構成は図2に示す実施の形態1と同様であるので、それらの説明は省略する。
物体総合判定部7は、物体判定処理部11において複数の判定処理によって与えられた各画素または領域における点数の総計を算出する。その結果により、対象の物体か否かを判定する。物体判定処理部11において、傾斜または高さ、幅に対してフラグを設け、そのフラグによって物体の種類を判定することも可能である。また、判定条件毎に重みを付け、点数を加算することも可能である。この方法によれば、抽出対象物を複数の点から評価することができる他、例えば、受信信号に含まれる雑音等により、ある判定条件では適切な判定がなされなかった領域でも、他の判定条件によって抽出が可能となり、検出精度の劣化を抑えることができる。
【0039】
認識部8では、物体総合判定部7で対象の物体と判定検出された物体に対して、認識処理を行う。認識処理では、テクスチャ/パターンマッチングを行うものとする。認識部8は、認識を行う物体のテクスチャ/パターンの参照画像(リファレンス)を所持していることとする。図15Aのように遠方から物体の検出を行っている状態を基準とすると、図15Bのように物体にセンサが近づいた場合、観測される画像中の物体は大きくなる。この状態のままでマッチング処理を行うことは不可能であるため、参照画像のサイズに合わせて観測画像を縮小する。この際の縮小率は、図15Aにおいて視線方向の距離をda、図15Bにおいて視線方向の距離をdbとすると、 db/daで表される。逆に参照画像を観測画像サイズに拡大することも可能である。このように縮小/拡大した画像に対してマッチング処理を行う。
【0040】
上述のように上記認識部8によるマッチング処理を行った結果、図16Aに示すように、所定の値よりも高いマッチング度を持つ候補参照画像(テクスチャ/パターン)が挙げられた場合は、図16Bに示すように、その候補参照画像(テクスチャ/パターン)のみを用いてその次に得られた、すなわち、距離が異なる画像に対してマッチング処理をかける。これにより、処理負荷の軽減が可能になると共に、リファレンス種類の絞込みによる認識精度の向上が挙げられる。以上の処理において認識された領域または輪郭を表示部6に受け渡す。
【0041】
なお、実施の形態1において、物体判定処理部11の後段に認識部8を備え、認識部8で認識された領域または輪郭を表示部6に受け渡す構成にしてもよい。また、実施の形態2において、認識部8を備えず、物体総合判定部7で対象の物体と判定検出された結果を表示部6に受け渡す構成でもよい。
【0042】
表示部6では、物体判定処理部11もしくは認識部8、あるいは物体総合判定部7において各画素または領域に与えられた点数またはフラグに応じてその画素または領域の画像上の座標及び実空間内での位置、およびテクスチャ/パターンを表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【0043】
実施の形態3.
図17はこの発明の実施の形態3によるレーダ画像処理装置の構成を示すブロック構成図である。
以下、図17に従い、その構成を説明する。
1000は、取得データ入力部1において入力された強度画像に対し、補正を行う強度画像補正部、
2000は、3D画像作成処理部2からの3次元画像についての入力データに対し、不要データを除去する不要データ除去部、
3000は、高度断面図作成部4で作成された、解析領域に対する検出対象物の高度断面図の1種である高度-左右方向長さ(以下幅と称す)分布図から地上の高度または強度を取り出す地上高度・強度算出部、
4000は、物体判定処理部11において、検出対象物と判定され、判定値を付与された各解析領域の高度距離分布図中の画素を基に、物体の存在する画素または領域を抽出する物体領域決定処理部である。
その他の構成は実施の形態1または2と同じ処理のものを備える。
【0044】
以下では、センサと観測領域の所定観測点との距離を画素値とした画像を距離画像、また、同観測点における受信強度すなわち検出対象物からの反射強度データが得られる場合には、それを強度画像と呼ぶこととする。
【0045】
強度画像補正部1000では、強度画像を補正するために、距離二乗補正を行う。これは、光源からの光の強さは光源からの距離の2乗に反比例するという物理現象に基づくものである。センサから観測対象への視線方向の距離をd、基準となる距離をdf、補正された強度をI’とすると補正の式は式5のように表される。
【0046】
【数5】
【0047】
本手法は、後段の物体判定部5において強度値を用いた判定を行う場合に有効であり、目標検出精度を向上させる効果がある。
【0048】
不要データ除去部2000では、所定高度以上のデータや、所定強度閾値以下のデータを除去する。これにより、目標検出の誤検出を抑止するメリットがある。
【0049】
地上高度・強度算出部3000の一構成例を地上高度・強度算出部3000aとして図18に示す。図18では、領域設定処理部10において設定される領域データ内の高度値を用いて地上を検出するために平面を検出する平面検出部3001、所定サイズのウィンドウを設定するウィンドウサイズ決定部3003、ウィンドウサイズ決定部3003で設定されたウィンドウ内の検出平面が地上か否かの判定して、センサ観測領域の地上の高度モデルを作成する判定・地上モデル作成部3002、地上の反射強度値を算出する地上強度算出部3004で構成している例であり、地上の高度値と地上の反射強度値を出力する。
【0050】
平面検出部3001では、図6にて説明している平面判定部5cと同様の処理手法を用い、平面検出は高度のばらつきが小さい箇所を平面として検出する。その際、式3の高度標準偏差値を用いる。高度標分散値が任意高度内の場合、その領域または画素を平面として抽出する。
【0051】
平面検出部3001では、上記段落[0050]記載の手法の他に、非特許文献2の手法を用いてもよい。非特許文献2では、3次元座標点の分布のばらつきから平面度合を固有値を用いて算出している。また、3次元座標点群の最小二乗平面の法線ベクトルを用い、そのベクトルが地上に対して垂直方向の任意角度を持っている場合、その領域を平面として検出する。これを領域設定処理部10において設定される領域に適用することで、平面が抽出可能である。
【0052】
ウィンドウサイズ決定部3003において、所定サイズのウィンドウを設定する。さらに、判定・地上モデル作成部3002では、上記段落[0050]または[0051]において検出された平面検出結果に対し、図19のようにウィンドウを動かし、ウィンドウ内の最も高度が低い平面データをそのウィンドウ内の地上高度とする。この際、ウィンドウサイズは目標とするターゲットよりも大きくすることによって、目標上の平面部分を除去することができるメリットがある。本結果より、観測領域内の地面モデルを作成することができる。
【0053】
地上強度算出部3003では、判定・地上モデル作成部3002において抽出された地上からの反射による受信信号の強度値の平均または中央値等を地上の強度として抽出する。地上の強度値を選択する方法はこれに限ったものではない。
【0054】
物体判定処理部11内の物体判定部5の構成は図4に示す実施の形態1と同様に高度判定処理部500、サイズ・形状判定処理部501及び強度判定処理部503で構成される。強度判定処理部503における強度判定処理に関しては、図4、図6に示す強度判定処理部における強度判定処理例として、単一強度閾値による検出が考えられるが、本実施の形態3においては、図20に示すような地上強度算出部3003において抽出した地上強度を用いた検出を行う。この地上強度を基準とした複数閾値を用いて閾値処理を行うことにより、背景よりも強度の高い目標と強度の低い目標どちらも抽出可能となる。
【0055】
高度判定処理部500では、判定・地上モデル作成部3002の結果である地上モデルを用いることにより、基準高度を地上に設定することができる。それにより、実際の物体高度を得ることができるため、より精度の高い高度判定処理を行うことができるメリットがある。
【0056】
物体領域決定処理部4000では、物体判定処理部11において抽出された物体候補画素を入力とし、物体の存在する画素領域または3次元的な領域を出力する。その構成例を図21の4000aとして示す。図21では、物体領域決定処理部4000aは物体候補画素のクラスタ化を行うクラスタ処理部4001と、その結果から誤抽出を除去する誤抽出判定部4002で構成されている例であり、それぞれの条件をすべて満たす領域を検出対象物とし、物体領域判定結果として出力する。
【0057】
クラスタ処理部4001では、各画素の3次元座標値が近いデータを1つの物体としてみなす処理を行う。クラスタ化の処理の一例として、非特許文献3の手法が挙げられる。非特許文献3では、各点の3次元点座標値の距離を用いてクラスタ化を行う。
【0058】
誤抽出判定部4002では、クラスタ処理部4001の出力である各クラスタから物体だけを抽出する処理を行う。その一例として、クラスタの3次元的な大きさから目標とする物体の大きさに相当する物体のみを検出し、誤検出を除去し、その結果を出力する。
【0059】
表示部6では、誤抽出判定部4002において領域に与えられた領域または画像上の座標及び実空間内での位置を表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【0060】
実施の形態4.
本実施の形態では、反射強度が弱く、正しい距離データが数点のみしか得られない目標に関しても有効な目標検出処理手法を述べる。
【0061】
図22はこの発明の実施の形態4によるレーダ画像処理装置の構成を示すブロック構成図である。
以下、図22に従い、その構成を説明する。
5000は、地上高度・強度算出部3000により作成される高度データを用いて3D画像作成処理部2からの3D画像・強度データより物体の候補を抽出する物体候補領域抽出部、
6000は、物体候補領域抽出部5000で抽出された物体の候補をについて採番する領域ラベリング部である。
その他の構成および処理は実施の形態1または2または3と同じものを備える。本実施の形態では、地面は反射強度がある程度強く、正しいデータが取得できることを前提としている。すなわち、反射強度が弱く、信頼性のない距離データが得られている画素には任意高度を持つ物体が存在していることを前提とする。
【0062】
物体候補領域抽出部5000の一構成例を図23に示す。図23では、3D画像・強度データ、領域データを入力とし、全ての物体を抽出する全物体領域抽出処理部5001、全物体領域抽出処理部5001の出力の中でも不要なデータを除去する不要物体領域抽出部5002、所望の目標と想定される物体候補領域を抽出する物体候補領域判定部5003で構成されている例であり、物体の候補となる領域を出力する。
【0063】
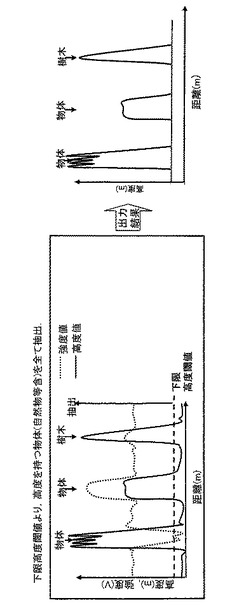
全物体領域抽出処理部5001の処理例として、図24に概略図を示す。高度・強度分布図と強度値の低い物体、強度値の高い物体、樹木が存在するとする。本処理は地上高度・強度算出部3000より得られる地上モデルを用いて基準高度を地上に設定している。ただし、基準高度を地上に設定できるものならば他手法でも構わない。地上を検出しない任意下限高度閾値を設定し、その下限高度閾値を超えた画素を抽出した結果を図24の右に示す。これにより、物体と自然物の高度情報を持つデータが抽出される。本処理に関して、エッジ検出などの画素値勾配を用いてもよく、領域を抽出できるものならばこれに限るものではない。
【0064】
不要物体領域抽出部5002の処理例として、図25に概略図を示す。データ有効境界強度値とは、距離値が正確に取得できる反射強度の境界値を表す。すなわち、本境界強度値以上あれば、正しい距離値が得られるため、この強度値以下の距離データは誤検出が発生する。本処理では、強度値がデータ有効境界強度値以上で、任意上限高度閾値以上の、真に高度が高いデータのみを抽出し、誤検出によって高い高度のデータが取得されている場合は抽出対象外とする。上限高度閾値は検出したい物体の高度よりも大きくすることとする。
【0065】
物体候補領域判定部5003の処理例として、図26に概略図を示す。全物体領域抽出処理部5001の結果から不要物体領域抽出部5002の結果を減算することにより、樹木のような真に高度が高い情報を削除することができる。これにより、目標のデータを削除することなく、誤検出を抑止できる不要データ除去が可能となる。
【0066】
物体候補領域判定部5003において抽出された各領域に対して、低SNR下における観測環境では、図27の白車両部のように穴が開く場合も考えられる。これは、車両のフロントガラス等、部分的に反射強度が低くなる状況が発生するためである。物体候補領域判定部5003では、その間を補間する処理も行う。その手法として、2次元画像上において物体候補領域として判定された画素で囲まれた画素は物体候補として領域を埋めるものである。ただし、正しいデータが取得できる高SNR下における観測においては、本処理を行う必要はない。
【0067】
領域ラベリング部6000の処理例として、図28に概略図を示す。物体候補領域判定部5003において抽出された各領域に対して、番号をつけ、物体候補領域とラベリング結果を出力する。
【0068】
領域決定処理部4000の一構成例を図29に4000bとして示す。図29では、領域決定処理部4000bは、物体判定処理部11によって出力される物体候補画素と、領域ラベリング部6000によって出力される物体候補領域とラベリング結果を入力とし、入力の論理積をとることにより、目標候補領域を選定する総合判定部4003と、その結果から誤抽出を除去する誤抽出判定部4002bで構成されている例であり、それぞれの条件をすべて満たす領域を検出対象物とし、物体領域判定結果として出力する。
【0069】
総合判定部4003の処理例を図30に示す。物体判定処理部11の出力である物体候補画素、領域ラベリング部6000の結果であるラベリング結果と、物体候補領域の画素を入力とし、その結果の論理積をとる。これにより、図30右のように、物体のみの抽出を可能としつつ、目標の形状を全て抽出することができる。本処理により、物体特有の形状を出力することが可能となる。
【0070】
誤検出判定部4002bでは、ラベリング処理部6000によって振り分けられた番号ごとに3次元的な大きさを見積り、その大きさが目標と類似しているもののみを抽出し、その結果である番号と物体候補領域画素を出力する。
【0071】
表示部6では、誤抽出判定部4002において領域に与えられた物体候補領域画素または画像上の座標及び実空間内での位置を表示する。表示法としては、例えば、物体が占める領域を数値にする方法や、また、その領域を矩形もしくは物体特有の形状で囲む方法がある。
【産業上の利用可能性】
【0072】
この発明によるレーダ画像処理装置は航空機から地上に向けてレーダビームを放射し地表面や人工構造物で反射し戻ったビームから3次元デジタルデータを取得し、検出対象物を検出するシステムなどへの適用が可能である。
【符号の説明】
【0073】
1;取得データ入力部、2;3D画像作成処理部、3;領域抽出処理部、4;高度断面作成部、5;物体判定部、6;表示部、7;物体総合判定部、8;認識部、10;領域設定処理部、11;物体判定処理部、12;領域条件設定部、13;判定条件設定部、500;高度判定処理部、501、501b、501c;サイズ・形状判定処理部、502;強度判定処理部、503;影領域判定処理部、504;隣接高度領域判定処理部、505;平面判定処理部、1000;強度画像補正部、2000;不要データ除去部、3000;地上高度・強度算出部、3001;平面検出部、3002;判定・地上モデル作成部、3003;ウィンドウサイズ決定部、3004;地上強度算出部、4000;物体領域決定処理部、4001;クラスタ処理部、4002;誤抽出判定部、4003;総合判定部、4002b;誤抽出判定部、5000;物体候補領域抽出部、5001;全物体領域抽出処理部、5002;不要物体領域抽出部、5003;物体候補領域判定部、6000;領域ラベリング部。
【特許請求の範囲】
【請求項1】
移動体に搭載されたレーダで所定の観測領域内の検出対象物体を検出するレーダ画像処理装置において、所定の観測領域内に存在する検出対象物体までの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、上記3次元画像中の所定の領域を抽出する領域設定処理手段と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成手段と、上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理手段と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項2】
3次元画像は、検出対象物体の高度方向、高度方向に直交するレーダ基準方向、及び高度方向とレーダ基準方向に直交する方向を軸に生成され、領域設定処理手段は、高度方向及び、高度方向とレーダ基準方向の両方向に直交する方向のすべての画素と、レーダ基準方向の所定幅の画素からなる領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
3次元画像は、検出対象物体の高度方向、高度方向に直交するレーダ基準方向、及び高度方向とレーダ基準方向に直交する方向を軸に生成され、領域設定処理手段は、高度方向及び、レーダ基準方向の両方向すべての画素と、高度方向とレーダ基準方向の両方向に直交する方向の所定幅の画素からなる領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項4】
領域設定処理手段は、検出対象物体の大きさまたは形状と同程度の大きさまたは形状の領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項5】
取得データ入力手段は、さらに検出対象物体からの反射強度を取得し、物体判定処理手段は、高度断面図により検出対象物体の判定を行う際、検出対象物体の高度及び検出対象物体からの反射強度を用いて検出対象物体判定を行うことを特徴とする請求項1〜請求項4の何れか1項に記載のレーダ画像処理装置。
【請求項6】
物体判定処理手段は、高度断面図に対して平面抽出を行い検出対象物体の判定を行うことを特徴とする請求項1〜請求項5の何れか1項に記載のレーダ画像処理装置。
【請求項7】
領域設定処理手段は、解析領域に反射波が得られない部分を含む領域を抽出し、物体判定処理手段は、解析領域中の反射波が得られない部分の大きさまたは形状と、検出対象物体の大きさまたは形状を比較し、判定することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項8】
領域設定処理手段は、請求項2〜請求項4記載のいずれかまたはその組合せの解析領域を抽出する構成にされ、物体判定処理手段は請求項5〜請求項7の何れか1項に記載の物体判定処理手段の構成を備え、複数の物体判定結果を入力として、総合的な物体判定または物体識別を行う物体総合判定手段を備えることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項9】
マッチングパターン用の参照画像を所持し、レーダと検出対象物体までの観測距離値を基に物体判定処理手段または物体総合判定手段により、検出対象物体と判定された検出物体の画像または参照画像のサイズを動的に変更し、検出対象物体の画像と参照画像とのマッチング処理により検出対象物体の認識を行う認識手段を備えることを特徴とする請求項1または請求項8に記載のレーダ画像処理装置。
【請求項10】
認識手段は、検出対象物体の画像と参照画像とのマッチング処理により、マッチング度が所定値以上となった参照画像を用い、以後の異なる観測距離値から得られた検出対象物体の画像に対してマッチング処理を行うことを特徴とする請求項9記載のレーダ画像処理装置。
【請求項11】
移動体に搭載されたレーダで所定の観測領域内の検出対象物体を検出するレーダ画像処理装置において、所定の観測領域内に存在する検出対象物体までの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得距離データを用いて強度データを補正する強度画像補正部と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、3D画像作成処理手段の出力である3次元画像から不要データの除去を行う不要データ除去部と、上記3次元画像中の所定の領域を抽出する領域設定処理部と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成部と、高度断面図作成部の高度断面図から地上の高度と地上の反射強度値を算出する地上高度・強度算出手段と、地上の高度と地上の反射強度値を用いて上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理部と、検出対象物体が存在する領域を指定する物体領域決定処理部と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項12】
地上高度・強度算出手段は、請求項4または請求項7または請求項8記載の領域設定処理手段において設定される領域データ内の高度値を用いて地上を検出し、地上の反射強度値を算出することを特徴とする請求項11記載のレーダ画像処理装置。
【請求項13】
物体判定処理手段は、請求項12記載の強度算出結果と検出対象物体の高度及び検出対象物体と背景強度からの反射強度の差を用いて検出対象物体判定を行うことを特徴とする請求項11に記載のレーダ画像処理装置。
【請求項14】
物体が存在する候補となる画素または空間的な領域を抽出する物体候補領域抽出部と、その画素または領域に対して番号を振り分ける領域ラベリング部を備え、請求項11に記載の物体判定部からの出力結果と領域ラベリング部の出力との論理積をとることにより物体が存在する領域を指定する物体領域決定処理部を備えた請求項11〜請求項13の何れか1項に記載のレーダ画像処理装置。
【請求項1】
移動体に搭載されたレーダで所定の観測領域内の検出対象物体を検出するレーダ画像処理装置において、所定の観測領域内に存在する検出対象物体までの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、上記3次元画像中の所定の領域を抽出する領域設定処理手段と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成手段と、上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理手段と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項2】
3次元画像は、検出対象物体の高度方向、高度方向に直交するレーダ基準方向、及び高度方向とレーダ基準方向に直交する方向を軸に生成され、領域設定処理手段は、高度方向及び、高度方向とレーダ基準方向の両方向に直交する方向のすべての画素と、レーダ基準方向の所定幅の画素からなる領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
3次元画像は、検出対象物体の高度方向、高度方向に直交するレーダ基準方向、及び高度方向とレーダ基準方向に直交する方向を軸に生成され、領域設定処理手段は、高度方向及び、レーダ基準方向の両方向すべての画素と、高度方向とレーダ基準方向の両方向に直交する方向の所定幅の画素からなる領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項4】
領域設定処理手段は、検出対象物体の大きさまたは形状と同程度の大きさまたは形状の領域を解析領域として抽出することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項5】
取得データ入力手段は、さらに検出対象物体からの反射強度を取得し、物体判定処理手段は、高度断面図により検出対象物体の判定を行う際、検出対象物体の高度及び検出対象物体からの反射強度を用いて検出対象物体判定を行うことを特徴とする請求項1〜請求項4の何れか1項に記載のレーダ画像処理装置。
【請求項6】
物体判定処理手段は、高度断面図に対して平面抽出を行い検出対象物体の判定を行うことを特徴とする請求項1〜請求項5の何れか1項に記載のレーダ画像処理装置。
【請求項7】
領域設定処理手段は、解析領域に反射波が得られない部分を含む領域を抽出し、物体判定処理手段は、解析領域中の反射波が得られない部分の大きさまたは形状と、検出対象物体の大きさまたは形状を比較し、判定することを特徴とする請求項1記載のレーダ画像処理装置。
【請求項8】
領域設定処理手段は、請求項2〜請求項4記載のいずれかまたはその組合せの解析領域を抽出する構成にされ、物体判定処理手段は請求項5〜請求項7の何れか1項に記載の物体判定処理手段の構成を備え、複数の物体判定結果を入力として、総合的な物体判定または物体識別を行う物体総合判定手段を備えることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項9】
マッチングパターン用の参照画像を所持し、レーダと検出対象物体までの観測距離値を基に物体判定処理手段または物体総合判定手段により、検出対象物体と判定された検出物体の画像または参照画像のサイズを動的に変更し、検出対象物体の画像と参照画像とのマッチング処理により検出対象物体の認識を行う認識手段を備えることを特徴とする請求項1または請求項8に記載のレーダ画像処理装置。
【請求項10】
認識手段は、検出対象物体の画像と参照画像とのマッチング処理により、マッチング度が所定値以上となった参照画像を用い、以後の異なる観測距離値から得られた検出対象物体の画像に対してマッチング処理を行うことを特徴とする請求項9記載のレーダ画像処理装置。
【請求項11】
移動体に搭載されたレーダで所定の観測領域内の検出対象物体を検出するレーダ画像処理装置において、所定の観測領域内に存在する検出対象物体までの距離と、その検出対象物体に対するアジマス方向角度とエレベーション方向角度のデータを取得する取得データ入力手段と、取得距離データを用いて強度データを補正する強度画像補正部と、取得データ入力手段で取得した距離とアジマス方向角度とエレベーション方向角度を用いて、観測領域内の3次元画像を生成する3D画像作成処理手段と、3D画像作成処理手段の出力である3次元画像から不要データの除去を行う不要データ除去部と、上記3次元画像中の所定の領域を抽出する領域設定処理部と、上記所定領域に含まれる画像データを用いて、高度断面図を作成する高度断面図作成部と、高度断面図作成部の高度断面図から地上の高度と地上の反射強度値を算出する地上高度・強度算出手段と、地上の高度と地上の反射強度値を用いて上記高度断面図に検出対象物体が存在するか否かの判定を行う物体判定処理部と、検出対象物体が存在する領域を指定する物体領域決定処理部と、検出対象物体が存在する画素または実空間上の位置を表示出力する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項12】
地上高度・強度算出手段は、請求項4または請求項7または請求項8記載の領域設定処理手段において設定される領域データ内の高度値を用いて地上を検出し、地上の反射強度値を算出することを特徴とする請求項11記載のレーダ画像処理装置。
【請求項13】
物体判定処理手段は、請求項12記載の強度算出結果と検出対象物体の高度及び検出対象物体と背景強度からの反射強度の差を用いて検出対象物体判定を行うことを特徴とする請求項11に記載のレーダ画像処理装置。
【請求項14】
物体が存在する候補となる画素または空間的な領域を抽出する物体候補領域抽出部と、その画素または領域に対して番号を振り分ける領域ラベリング部を備え、請求項11に記載の物体判定部からの出力結果と領域ラベリング部の出力との論理積をとることにより物体が存在する領域を指定する物体領域決定処理部を備えた請求項11〜請求項13の何れか1項に記載のレーダ画像処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2010−197378(P2010−197378A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−289381(P2009−289381)
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]