
レーダ画像処理装置
【課題】この発明は、アジマスアンビギュイティ以外の種類の虚像についても検出することができるレーダ画像処理装置を提供する。
【解決手段】パラメータ格納部102には、既知の1分解能を最小単位として処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフトする。コヒーレンス算出部104は、シフト前の処理対象画像と、シフト後の処理対象画像とについて、相関の度合いを示すコヒーレンスを算出する。虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内に虚像が存在しているか否かを判断する。
【解決手段】パラメータ格納部102には、既知の1分解能を最小単位として処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフトする。コヒーレンス算出部104は、シフト前の処理対象画像と、シフト後の処理対象画像とについて、相関の度合いを示すコヒーレンスを算出する。虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内に虚像が存在しているか否かを判断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、合成開口レーダ、逆合成開口レーダ及び実開口レーダ等に用いられ、これらのレーダの画像処理を行うレーダ画像処理装置に関する。
【背景技術】
【0002】
一般的に、合成開口レーダ、逆合成開口レーダ及び実開口レーダは、観測対象に対して電波を照射し、その反射波を受信して信号処理をすることによって、レーダ画像を得る。これらの方式のレーダでは、観測対象に電波を照射する際に、観測対象範囲外にも電波の一部が照射されるため、観測対象範囲外に存在する物体によって強い反射波が生じる場合がある。このような場合には、観測対象範囲のレーダ画像を再生すると、観測対象範囲内の像として、観測対象範囲外からの強い反射波に基づく像が映し出されるという問題がある。このような観測範囲内に存在しない物体のレーダ画像中に映り込んだ像を虚像という。
【0003】
ここで、例えば、非特許文献1に示すような従来のレーダ画像の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側のデータ毎に画像を再生して、ビーム右側又はビーム左側の画像のみに写った像を、虚像であるとして判別可能である。この従来の虚像検出方法によって検出可能となる虚像は、レーダのビームの側方から入り込む強い反射波によって生じる虚像であるアジマスアンビギュイティである。なお、アジマスアンビギュイティ以外の虚像検出方法は、一般的に知られておらず、多くの場合において、レーダ画像利用者の目視によって、再生されたレーダ画像から虚像の検出が行われる。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】G. Hajduch, P. Leilde, and V. Kerbaol, “Ship detection on ENVISAT ASAR data : results, limitations and perspectives, ” Proceedings of SEASAR 2006.
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような従来の虚像検出方法は、アジマスアンビギュイティが側方からの反射波によって生じる特徴を利用したものである。このため、上記のような従来の虚像検出方法では、レンジアンビギュイティと呼ばれるレーダのビームの上方又は下方からの強い反射波による虚像や、干渉波と呼ばれる放送、通信又は他のレーダに利用される電波を受信したことによる虚像等を検出することができないという問題があった。従って、上記のような従来の虚像検出方法では、アジマスアンビギュイティ以外の種類の虚像については検出することはできなかった。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、アジマスアンビギュイティ以外の種類の虚像についても検出対象とすることができるレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係るレーダ画像処理装置は、取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、前記コヒーレンス算出部によって算出されたコヒーレンスに基づいて、前記処理対象画像内にぼけ領域が存在するか否かを判断し、前記処理対象画像内にぼけ領域が存在すると判断した場合に、前記処理対象画像内に虚像が存在すると判断する虚像判断部とを備えるものである。
【発明の効果】
【0008】
この発明に係るレーダ画像処理装置によれば、コヒーレンス算出部が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とのコヒーレンスを算出し、虚像判断部が、コヒーレンスに基づいて処理対象画像内にぼけ領域が存在するか否かを判断し、処理対象画像内にぼけ領域が存在すると判断した場合に、処理対象画像内に虚像が存在すると判断するので、処理対象画像中に虚像が存在する場合に、その虚像についてのぼけ領域が存在する画素は分解能単位での周囲の画素との相関を有することにより、処理対象画像内のアジマスアンビギュイティ以外の種類の虚像についても検出することができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1によるレーダ画像処理装置を示すブロック図である。
【図2】レーダ画像の結像状態を説明するための説明図である。
【図3】図1のレーダ画像処理装置の動作を示すフローチャートである。
【図4】この発明の実施の形態2によるレーダ画像処理装置を示すブロック図である。
【図5】図4のレーダ画像処理装置の動作を示すフローチャートである。
【図6】この発明の実施の形態3によるレーダ画像処理装置を示すブロック図である。
【図7】図6の画像ぼけ解析部の解析処理に用いられる関数の一例を示すグラフである。
【図8】図6のレーダ画像処理装置の動作を示すフローチャートである。
【図9】この発明の実施の形態4によるレーダ画像処理装置を示すブロック図である。
【図10】図9の分解能推定部の推定処理に用いられる関数の一例を示すグラフである。
【図11】図9のレーダ画像処理装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
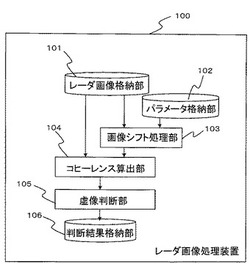
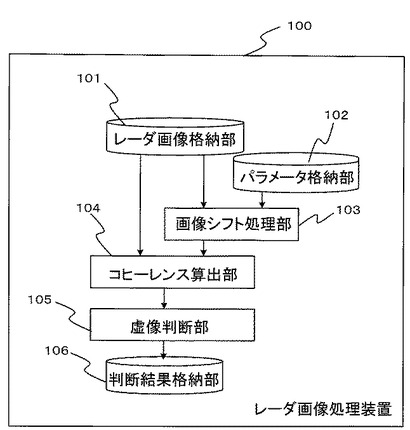
図1は、この発明の実施の形態1によるレーダ画像処理装置を示すブロック図である。
図1において、レーダ画像処理装置100は、観測対象へアンテナ(図示せず)から電波を照射することによって得るレーダ画像を処理するものである。また、レーダ画像処理装置100は、レーダ画像格納部101、パラメータ格納部102、画像シフト処理部103、コヒーレンス算出部104、虚像判断部105及び判断結果格納部106を有している。
【0011】
レーダ画像格納部101には、前段の受信処理装置(図示せず)による受信処理を受けたレーダ画像(SAR画像:Synthetic Aperture Radar)の一部又は全部が処理対象画像として格納される。なお、このレーダ画像格納部101に格納される処理対象画像は、合成開口レーダの画像再生処理後のデータでもよく、その画像再生処理の途中のデータでもよい。
【0012】
パラメータ格納部102には、処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。このシフトパラメータのシフト量は、1分解能以上が基本である。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフト(変位)する。コヒーレンス算出部104は、レーダ画像格納部101に格納されたシフト前の処理対象画像と、画像シフト処理部103によってシフトされたシフト後の処理対象画像とについて、相関の度合いを示すコヒーレンス(相関係数)を算出する。
【0013】
虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内にぼけ領域が存在しているか否かを判断する。また、虚像判断部105は、処理対象画像内にぼけ領域が存在していると判断した場合に、処理対象画像内に虚像が存在していると判断する。判断結果格納部106には、虚像判断部105によるぼけ領域の有無、又は虚像の有無についての判断結果が格納される。
【0014】
次に、レーダ画像の結像状態について説明する。レーダ画像処理装置100の検出対象とする虚像は、レーダの想定する観測対象領域の外に存在する物体が観測対象領域に投影されてなる像(即ちアンビギュイティ)や、放送波、通信波又は他のレーダ装置の送信波や妨害波等の干渉波が基となる像である。また、レーダの想定する観測対象領域とは、レーダで画像化したい領域であり、一般的には、アンテナのメインビームが照射された領域である。さらに、レーダ画像においては、像がぼけている場合を除いて、画像中の各地点の観測対象の情報が1分解能以内に収まるという特徴がある。
【0015】
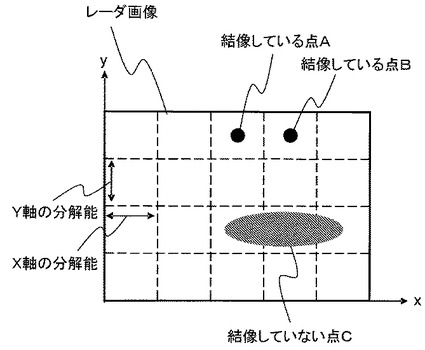
図2は、レーダ画像の結像状態を説明するための説明図である。図2の点A,Bは、ぼけずに結像した像であり、図2の領域Cは、ぼけた像、即ちぼけ領域である。また、図2のレーダ画像は、x軸(例えばレンジ方向:距離方向)及びy軸(例えばアジマス方向:角度方向)の2軸の座標によって表されている。また、図2の格子の幅は、画像のx軸及びy軸のそれぞれの分解能の大きさである。
【0016】
図2において、レーダ画像中で、互いに1分解能以上離れた地点間でコヒーレンスを計算すると、像がぼけていない場合には、コヒーレンスがほぼ0となり、像がぼけている場合にはコヒーレンスが0よりも大きな値となる。また、レーダ画像の再生処理では、観測対象領域からの反射波のみを画像として結像するように(即ちぼけていない像となるように)処理される。このため、観測領域外の電波が基となるアンビギュイティは、ぼけた像としてレーダ画像中に現れる。
【0017】
さらに、レーダの送信波は、一定の方式・周波数で変調されており、画像再生の際には、受信波を復調して処理する。これに対して、虚像の基となる干渉波は、自身の送信波とは異なる方式・周波数で変調されている。このため、干渉波は、自身で復調できないため、干渉波による虚像は、アンビギュイティと同様に、レーダ画像中でぼけるという特性がある。なお、レーダ画像処理装置100の前段の受信処理装置において、観測領域内の自身の反射波についての受信処理が不完全な場合にも、レーダ画像中にぼけ領域が生じる。
【0018】
次に、コヒーレンス算出部104によるコヒーレンスの算出方法と、虚像判断部105による虚像又はぼけ領域の検出方法とについてより具体的に説明する。画像上の座標(x,y)の画素値をp(x,y)とし、x軸及びy軸方向のシフト量をそれぞれΔx及びΔyとした場合には、コヒーレンス算出部104は、次の式(1)を用いた演算を実行することによって、コヒーレンスγ(Δx,Δy)を算出する。
【0019】
【数1】

ただし、Aはコヒーレンスの算出範囲(処理対象範囲)であり、処理対象画像の一部の範囲又は全範囲である。*は複素共役である。
【0020】
そして、虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内のぼけ領域の有無を判断する。具体的に、虚像判断部105は、コヒーレンスの値がほぼ0であることを確認した場合には、ぼけ領域が処理対象画像内に存在していないと判断する。他方、虚像判断部105は、コヒーレンスの値が0よりも大きいことを確認した場合には、処理対象画像内にぼけ領域が存在すると判断し、そのぼけ領域が虚像であると判断する。即ち、虚像判断部105は、コヒーレンスの値が0よりも大きいことを確認することによって、ぼけ領域及び虚像を検出する。
【0021】
従って、レーダ画像処理装置100は、コヒーレンスを用いてレーダ画像内のぼけ領域を検出することによって、アジマスアンビギュイティによる虚像のみならず、レンジアンビギュイティによる虚像や干渉波による虚像についても、検出対象とすることができる。
【0022】
ここで、ぼけ領域が処理対象画像内に存在していないと判断する(コヒーレンスがほぼ0であると判断する)基準については、レーダ画像利用者が経験に基づいて定めてもよいし、あるいは予め設定した閾値を用いてもよい。この閾値は、レーダ画像利用者が経験に基づいて設定してもよい。また、シミュレーションにより、虚像又はぼけ領域が存在しない場合のコヒーレンスを計算し、そのコヒーレンスの最大値、平均値又は標準偏差等の統計量を指標として用いて、閾値を設定してもよい。
【0023】
次に、動作について説明する。図3は、図1のレーダ画像処理装置100の動作を示すフローチャートである。まず、ステップS101では、画像シフト処理部103が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS102では、コヒーレンス算出部104が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスを算出する。
【0024】
続いて、ステップS103では、虚像判断部105が、コヒーレンス算出部104によって算出されたコヒーレンスの値から、処理対象画像内の虚像又はぼけ領域の有無を判断する。そして、ステップS104では、虚像判断部105が、処理対象画像内の虚像又はぼけ領域の有無についての判断結果を判断結果格納部106に格納(保存)する。これにより、レーダ画像処理装置100の動作が終了する。
【0025】
上記のような実施の形態1のレーダ画像処理装置100によれば、コヒーレンス算出部104が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とのコヒーレンスを算出する。そして、虚像判断部105が、コヒーレンスに基づいて処理対象画像内にぼけ領域が存在するか否かを判断し、処理対象画像内にぼけ領域が存在すると判断した場合に、処理対象画像内に虚像が存在すると判断する。この構成により、処理対象画像中に虚像が存在する場合に、その虚像についてのぼけた像が存在する画素は分解能単位での周囲の画素と相関を有することから、アジマスアンビギュイティ以外の種類の虚像、即ちレンジアンビギュイティや干渉波による虚像等についても検出対象とすることができる。
【0026】
また、判断結果格納部106に格納された処理対象画像内の虚像又はぼけ領域の有無についての判断結果は、レーダ画像処理装置100の後段の処理装置(図示せず)において、例えば処理対象画像からの虚像又はぼけ領域の除去処理等に用いることができる。
【0027】
ここで、非特許文献1に示すような従来の虚像検出方法では、側方から強い反射波を返す特性を持つ観測対象についても、虚像として誤って検出されるという問題があった。
これに対して、実施の形態1のレーダ画像処理装置100では、虚像判断部105が、処理対象画像内におけるぼけ領域の有無の判断結果に基づいて、処理対象画像内における虚像の有無を判断する。この構成により、側方から強い反射波を返す特性を持つ観測対象について、虚像として誤検出がされることを回避できる。
【0028】
また、非特許文献1に示すような従来の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側の画像をそれぞれ再生するか、又はビーム右側、ビーム中央及びビーム左側で受信した電波を全て用いて1枚の画像を再生した後に、その再生した1枚の画像をビーム右側、ビーム中央及びビーム左側の画像に分解する処理が必要であった。
これに加えて、非特許文献1に示すような従来の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側の画像をそれぞれ作成した後に、それらを1画素以下の誤差で重ね合わせる必要がある。このため、ビーム右側、ビーム中央及びビーム左側の画像を作成しただけでは、例えば航空機の軌道が直線でない等のために1画素以上のずれが生じる場合があり、この場合にはそれぞれの画像を重ね合わせる処理が別途必要であった。
これに対して、実施の形態1のレーダ画像処理装置100では、画像の分解処理や、重ね合わせる処理が不要であることから、従来の虚像検出方法に比べて、処理負担を軽減させることができ、演算時間を短縮させることができる。
【0029】
さらに、レーダ画像利用者の目視により虚像を検出する方式では、画像上に虚像が比較的弱い信号強度でしか現れない場合があるため、その虚像については、レーダ画像利用者が虚像を目視により検出することが困難であった。
これに対して、実施の形態1のレーダ画像処理装置100では、信号処理によって虚像を検出するので、目視では困難な比較的弱い信号強度の虚像についても、検出対象とすることができる。
【0030】
なお、実施の形態1における式(1)のコヒーレンスに代えて、画像間の相関を計算する方法、例えば相関関数や変数変換した後に相関係数を計算する方法等を用いてもよい。
【0031】
また、実施の形態1の図3におけるステップS102を介さずに、座標(x,y)の画素と座標(x+Δx,y+Δy)の画素とのコヒーレンスを直接的に算出してもよい。ただし、虚像又は画像のぼけ領域を検出するためには、シフト量Δx及びΔyのうち、少なくともいずれか一方が分解能以上の値である必要がある。
【0032】
実施の形態2.
実施の形態1のレーダ画像処理装置100では、処理対象画像全体のシフト前後のコヒーレンスを用いることによって、処理対象画像内における虚像の有無を判断できるが、虚像又はぼけ領域の位置を特定することはできなかった。これに対して、実施の形態2のレーダ画像処理装置200では、処理対象画像のコヒーレンスに代えて、処理対象画像の各画素のコヒーレンス、即ち処理対象画像の局所的なコヒーレンスの分布であるコヒーレンスマップを作成し、そのコヒーレンスマップに基づいて、虚像又はぼけ領域の位置を特定可能となる。
【0033】
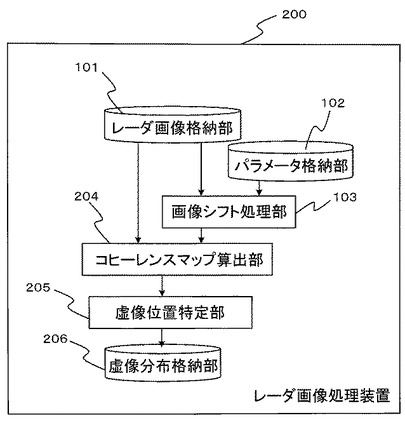
図4は、この発明の実施の形態2によるレーダ画像処理装置を示すブロック図である。図4において、実施の形態2のレーダ画像処理装置200の構成の概要は、実施の形態1のブロック構成と同様であるが、実施の形態1のコヒーレンス算出部104、虚像判断部105及び判断結果格納部106に代えて、図4のコヒーレンスマップ算出部204、虚像位置特定部205及び虚像分布格納部206を有している。
【0034】
コヒーレンスマップ算出部204は、レーダ画像格納部101に格納された処理対象画像と、画像シフト処理部103によるシフト後の処理対象画像とのコヒーレンスマップを算出(生成)する。虚像位置特定部205は、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップに基づいて、虚像の位置を特定する。虚像分布格納部206には、虚像位置特定部205によって特定した虚像の位置の情報が格納される。他の構成は、実施の形態1と同様である。
【0035】
次に、コヒーレンスマップ算出部204によるコヒーレンスマップの算出方法についてより具体的に説明する。コヒーレンスマップは、処理対象画像中の各画素において、その画素の周囲の画素とのコヒーレンスに基づいて作成される局所的なコヒーレンスの分布図である。コヒーレンスマップ算出部204は、演算対象画素の座標を(X,Y)とし、シフト量をΔx及びΔyとした場合における局所的なコヒーレンスγ(X,Y,Δx,Δy)について、次の式(2)を用いた演算を実行することによって算出できる。
【0036】
【数2】
ただし、Aは座標(X,Y)の周囲の画素の領域を示す。
【0037】
ここで、座標(X,Y)の周囲の画素の設定方法は様々あり、例えば、演算対象画素を中心とした上下左右及び斜め方向1画素ずつの領域である8近傍領域や、演算対象画素の縦方向の複数画素のみの領域や、演算対象画素の横方向の複数画素のみの領域や、演算対象画素を中心とする長方形状に設定した領域等が考えられる。また、座標(X,Y)の周囲の画素の設定方法は、処理対象画像内で一様である必要はなく、処理対象画像内の位置毎にその設定方法を適宜変更してもよい。
【0038】
次に、虚像位置特定部205による虚像又はぼけ領域の位置の特定方法についてより具体的に説明する。虚像位置特定部205は、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップの各画素の画素値(局所的なコヒーレンスの値)を確認する。そして、虚像位置特定部205は、コヒーレンスマップの各画素の画素値がほぼ0であることを確認した場合には、コヒーレンスマップの範囲内に虚像又はぼけ領域が存在しないものとして判断する。
【0039】
他方、虚像位置特定部205は、コヒーレンスマップの各画素の画素値が0よりも大きいことを確認した場合には、コヒーレンスマップの範囲内に虚像又はぼけ領域が存在していると判断する。また、虚像位置特定部205に、コヒーレンスマップの各画素の画素値に対する閾値が予め設定されていてもよい。この場合には、虚像位置特定部205は、コヒーレンスマップの各画素の画素値が閾値以上の値となる領域を、虚像又はぼけ領域の存在する位置として特定可能となる。
【0040】
この閾値については、レーダ画像利用者が経験に基づいて設定してもよい。また、コヒーレンスマップの画素値の出現確率分布(ヒストグラム)に基づいて閾値を設定してもよい。さらに、事前情報として虚像又は画像のぼけ領域が存在しない領域が判明している場合には、その判明している領域のコヒーレンスマップの画素値の最大値、平均値又は標準偏差等の統計量に基づいて閾値を設定してもよい。
【0041】
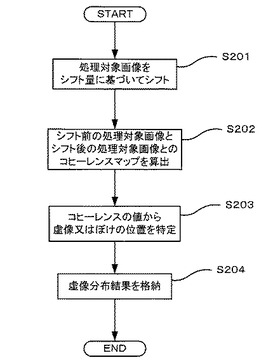
次に、動作について説明する。図5は、図4のレーダ画像処理装置200の動作を示すフローチャートである。図5において、ステップS201では、画像シフト処理部103が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS202では、コヒーレンスマップ算出部204が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスマップを算出する。
【0042】
続いて、ステップS203では、虚像位置特定部205が、コヒーレンスマップにおける各画素のコヒーレンスの値から虚像又はぼけ領域の位置を特定する。ステップS204では、虚像位置特定部205が、ステップS203で特定した虚像又はぼけ領域の位置である虚像分布を虚像分布格納部206に格納する。これにより、実施の形態2のレーダ画像処理装置200の動作が終了する。
【0043】
上記のような実施の形態2のレーダ画像処理装置200によれば、コヒーレンスマップ算出部204が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とから、コヒーレンスマップを算出する。この構成により、アジマスアンビギュイティ以外の種類の虚像についても検出対象とすることができるとともに、処理対象画像内に存在する虚像又は画像のぼけ領域の位置を特定することができる。
【0044】
また、虚像分布格納部206に格納された虚像分布の情報は、レーダ画像処理装置200の後段の処理装置(図示せず)において、実施の形態1と同様に、例えば処理対象画像からの虚像又はぼけ領域の除去処理等に用いることができる。さらに、虚像やぼけ領域についての位置表示に用いることもできる。また、虚像分布の情報から、虚像の種類を推定することもできる。例えば、レーダ画像のレンジ方向(距離方向)又はアジマス方向(角度方向)の軸に沿って直線状の虚像が存在する場合には、その虚像は干渉波によって生じたものであると推定できる。
【0045】
さらに、このコヒーレンスマップを表示機器に表示する場合には、処理対象画像内に存在する虚像又はぼけ領域について、レーダ画像利用者の目視によって特定することもできる。
【0046】
なお、実施の形態2における式(2)のコヒーレンスに代えて、実施の形態1の場合と同様に、画像間の相関を計算する方法、例えば相関関数や変数変換した後に相関係数を計算する方法等を用いてもよい。
【0047】
また、実施の形態2の図5におけるステップS202を介さずに、座標(x,y)の画素と座標(x+Δx,y+Δy)の画素とのコヒーレンスマップを直接的に算出してもよい。ただし、虚像又は画像のぼけ領域を検出するためには、シフト量Δx及びΔyのうち、少なくともいずれか一方が分解能以上の値である必要がある。
【0048】
さらに、実施の形態2におけるコヒーレンスマップ算出部204を実施の形態1におけるレーダ画像処理装置100に追加してもよい。この場合には、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布(ヒストグラム)に基づいて閾値を設定し、その設定した閾値を用いて、虚像判断部105が処理対象画像内に虚像が存在するか否かを判断してもよい。
【0049】
実施の形態3.
実施の形態1のレーダ画像処理装置100は、処理対象画像内における虚像又はぼけ領域の有無を判断し、実施の形態2のレーダ画像処理装置200は、処理対象画像内で虚像又はぼけ領域が存在している領域を特定した。これに対して、実施の形態3のレーダ画像処理装置300は、処理対象画像内に存在する虚像又はぼけ領域の広がり方向及び大きさ(ぼけ具合)を解析する。
【0050】
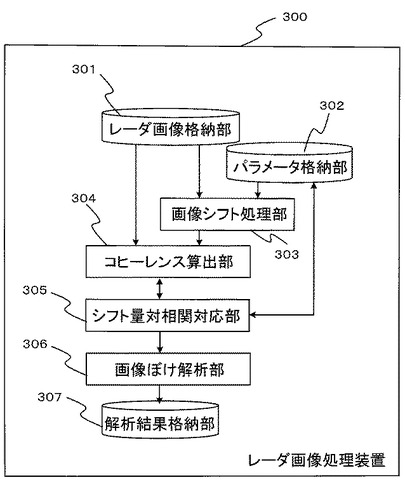
図6は、この発明の実施の形態3によるレーダ画像処理装置を示すブロック図である。図6において、実施の形態3のレーダ画像処理装置300は、レーダ画像格納部301、パラメータ格納部302、画像シフト処理部303、コヒーレンス算出部304、シフト量対相関対応部305、画像ぼけ解析部306及び解析結果格納部307を有している。レーダ画像格納部301、パラメータ格納部302、画像シフト処理部303及びコヒーレンス算出部304の構成は、実施の形態1の各機能ブロック101〜104の構成と同様である。
【0051】
シフト量対相関対応部305は、コヒーレンス算出部304によって算出されたコヒーレンスの値と、そのコヒーレンスの算出に用いられたシフトパラメータとを、コヒーレンス算出部304及びパラメータ格納部302から受ける。また、シフト量対相関対応部305は、コヒーレンス算出部304によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報として保存する。
【0052】
さらに、シフト量対相関対応部305は、シフト量対相関情報を保存した後に、未だコヒーレンスを計算していないシフトパラメータ(即ち、シフト量及びシフト方向)にパラメータ格納部302に格納されたシフトパラメータを変更し、処理対象画像についてのシフト量及びシフト方向を変更する。このシフト量の変更する範囲については、予め設定された範囲であり、x軸及びy軸のそれぞれの分解能を最小単位とする範囲である。また、シフト量対相関対応部305は、シフトパラメータを変更した後に、画像シフト処理部303及びコヒーレンス算出部304にそれぞれの処理を繰り返し実行させる。
【0053】
画像ぼけ解析部306は、シフト量対相関対応部305からシフト量対相関情報を受ける。また、画像ぼけ解析部306は、シフト量対相関情報に基づいて、処理対象画像内に存在する虚像又はぼけ領域の広がり方向及びぼけ具合を解析する。解析結果格納部307には、画像ぼけ解析部306による解析結果が格納される。
【0054】
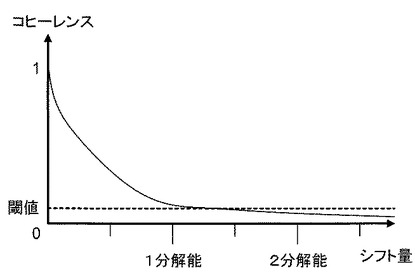
次に、画像ぼけ解析部306による解析方法についてより具体的に説明する。画像ぼけ解析部306は、例えば、図7に示すような一次元の関数、シフト量を2軸とした2次元の関数、シフト量若しくはコヒーレンスを変数変換して作成した関数、又はシフト量毎のコヒーレンスの計算結果から算出した統計量等を用いて、処理対象画像内の虚像又はぼけ領域の存在する方向及びぼけ具合を解析する。ここでは、図7の例を用いて説明する。
【0055】
画像ぼけ解析部306は、ぼけ領域の広がり方向について解析する場合には、画像の軸xのシフト量Δxについて、図7のコヒーレンスの関数を計算した結果と、軸yのシフト量Δyについてコヒーレンスの関数を計算した結果とを作成する。ただし、この際のシフト量の基本単位は各軸方向の画像の分解能とする(例えば分解能の2倍等としてグラフの横軸を標記する)。そして、画像ぼけ解析部306は、Δxに比べてΔyの方がコヒーレンスの低下度合いが小さいことを確認した場合には、y軸方向にぼけ領域が広がっていると判断できる。
【0056】
また、画像ぼけ解析部306は、ぼけ領域の大きさについて解析する場合には、図7に示すような閾値を用いる。即ち、画像ぼけ解析部306は、閾値をコヒーレンスが下回ったときのシフト量をぼけ領域の大きさとして解析できる。この閾値については、処理の実施者の経験に基づいても設定してもよい。あるいは、実施の形態2の虚像位置特定結果から虚像が存在していない領域を求め、その領域のコヒーレンスの平均値や分散等の統計量に基づいて設定してもよい。
【0057】
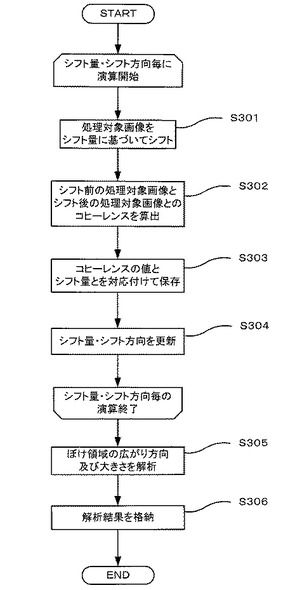
次に、動作について説明する。図8は、図6のレーダ画像処理装置300の動作を示すフローチャートである。図8において、ステップS301では、画像シフト処理部303が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS302では、コヒーレンス算出部304が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスを算出する。
【0058】
続いて、ステップS303では、シフト量対相関対応部305が、コヒーレンス算出部304によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報として保存する。そして、ステップS304では、シフト量対相関対応部305が、シフト量及びシフト方向を更新する。ここで、予め定められた範囲内でシフト量及びシフト方向毎に、ステップS301〜S304の演算処理が繰り返し実行される。
【0059】
ステップS301〜S304の演算処理が終了した後に、ステップS305の演算処理に移行する。ステップS305では、画像ぼけ解析部306が、シフト量対相関情報に基づいて、ぼけ領域の広がり方向及び大きさを解析する。ステップS306では、画像ぼけ解析部306が、ステップS305での解析結果の情報を解析結果格納部307に格納する。これにより、実施の形態3のレーダ画像処理装置300の動作が終了する。
【0060】
上記のような実施の形態3のレーダ画像処理装置300によれば、画像ぼけ解析部306が、シフト量対相関対応部305からのシフト量対相関情報に基づいて、処理対象画像内に存在するぼけ領域の広がり方向及び大きさを解析する。この構成により、画像ぼけ解析部306の解析結果の情報を用いて、虚像の分類(類別)をすることが可能となる。例えば、レンジ方向又はアジマス方向に一様なぼけ領域が処理対象画像内に存在する場合には、そのぼけ領域は干渉波によって生じた虚像であると推定することができる。
【0061】
また、解析結果格納部307に格納された解析結果の情報は、レーダ画像処理装置300の後段の処理装置(図示せず)において、例えば処理対象画像からの虚像又はぼけ領域の除去処理や、画像補正処理等に用いることができる。さらに、解析結果格納部307に格納された解析結果の情報のうちぼけ領域の大きさの情報は、レーダ画像処理装置300の後段のオートフォーカス処理装置(図示せず)において、ぼけ領域の大きさを動作パラメータとするレーダのオートフォーカス処理に用いることができる。
【0062】
実施の形態4.
実施の形態1〜3では、レーダ画像の分解能が既知情報であることが処理の前提条件であった。これに対して、実施の形態4では、レーダ画像の分解能が未知情報である場合に、分解能推定部406によって分解能が推定される。
【0063】
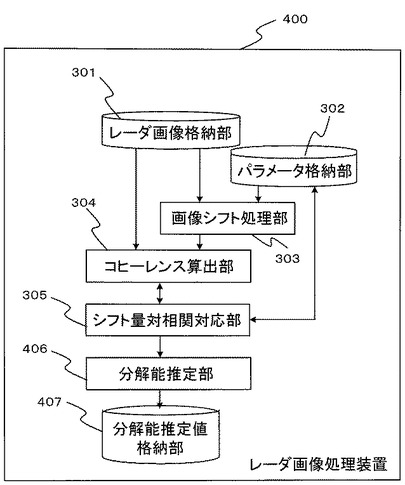
図9は、この発明の実施の形態4によるレーダ画像処理装置を示すブロック図である。図9において、実施の形態4のレーダ画像処理装置400の構成は、シフト量の基本単位が距離である点と、レーダ画像処理装置300の画像ぼけ解析部306及び解析結果格納部307に代えて分解能推定部406及び分解能推定値格納部407を有する点とを除いて、実施の形態3のレーダ画像処理装置300の構成と同様である。即ち、実施の形態4のレーダ画像処理装置400では、実施の形態3のレーダ画像処理装置300の機能ブロック301〜305が分解能推定用の機能ブロックとされる。
【0064】
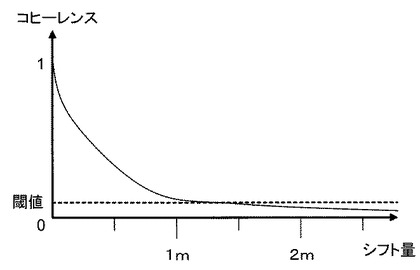
分解能推定部406は、シフト量対相関対応部305からシフト量対相関情報を受ける。また、分解能推定部406は、シフト量対相関情報に基づいて、レーダ画像の分解能を推定する。具体的に、分解能推定部406は、図10に示すようなシフト量とコヒーレンスとの関係を表すグラフを作成する。この図10のグラフと、実施の形態3における図7のグラフとの相違点は、シフト量の単位を分解能ではなく距離(例えばメートル単位)とした点である。
【0065】
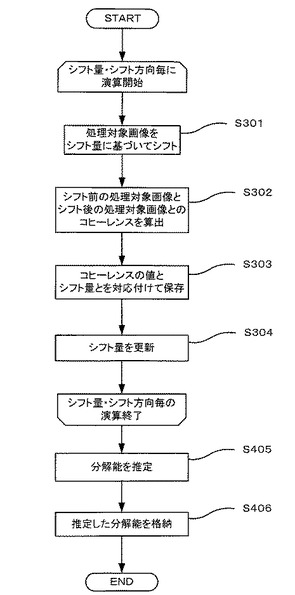
分解能推定部406は、コヒーレンスが予め設定された閾値を下回ったときのシフト量を分解能として推定できる。この閾値の設定方法は、実施の形態3と同様である。分解能推定値格納部407には、分解能推定部406による分解能の推定値が格納される。なお、図11は、図9のレーダ画像処理装置400の動作を示すフローチャートであり、レーダ画像処理装置400の動作の概要としては、実施の形態3のレーダ画像処理装置300の動作と同様である。
【0066】
上記のような実施の形態4のレーダ画像処理装置400によれば、分解能推定部406が、シフト量対相関対応部305からのシフト量対相関情報に基づいて、レーダ画像の分解能を推定する。この構成により、レーダ画像の分解能が未知情報である場合に、処理対象画像から分解能を推定することが可能になる。
【0067】
なお、実施の形態4のレーダ画像処理装置400の構成と、実施の形態1〜3のレーダ画像処理装置100〜300のそれぞれとの構成を組み合わせてもよい。このように組み合わせた構成では、分解能が未知情報である場合にも、レーダ画像処理装置100〜300が、レーダ画像処理装置400によって算出された分解能を基本単位とするシフト量を用いて、虚像若しくはぼけ領域の検出、位置特定又は解析を行うことができる。
【符号の説明】
【0068】
100〜400 レーダ画像処理装置、101,301 レーダ画像格納部、102,302 パラメータ格納部、103,303 画像シフト処理部、104,304 コヒーレンス算出部、105 虚像判断部、106 判断結果格納部、204 コヒーレンスマップ算出部、205 虚像位置特定部、206 虚像分布格納部、305 シフト量対相関対応部、306 画像ぼけ解析部、307 解析結果格納部、406 分解能推定部、407 分解能推定値格納部。
【技術分野】
【0001】
この発明は、合成開口レーダ、逆合成開口レーダ及び実開口レーダ等に用いられ、これらのレーダの画像処理を行うレーダ画像処理装置に関する。
【背景技術】
【0002】
一般的に、合成開口レーダ、逆合成開口レーダ及び実開口レーダは、観測対象に対して電波を照射し、その反射波を受信して信号処理をすることによって、レーダ画像を得る。これらの方式のレーダでは、観測対象に電波を照射する際に、観測対象範囲外にも電波の一部が照射されるため、観測対象範囲外に存在する物体によって強い反射波が生じる場合がある。このような場合には、観測対象範囲のレーダ画像を再生すると、観測対象範囲内の像として、観測対象範囲外からの強い反射波に基づく像が映し出されるという問題がある。このような観測範囲内に存在しない物体のレーダ画像中に映り込んだ像を虚像という。
【0003】
ここで、例えば、非特許文献1に示すような従来のレーダ画像の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側のデータ毎に画像を再生して、ビーム右側又はビーム左側の画像のみに写った像を、虚像であるとして判別可能である。この従来の虚像検出方法によって検出可能となる虚像は、レーダのビームの側方から入り込む強い反射波によって生じる虚像であるアジマスアンビギュイティである。なお、アジマスアンビギュイティ以外の虚像検出方法は、一般的に知られておらず、多くの場合において、レーダ画像利用者の目視によって、再生されたレーダ画像から虚像の検出が行われる。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】G. Hajduch, P. Leilde, and V. Kerbaol, “Ship detection on ENVISAT ASAR data : results, limitations and perspectives, ” Proceedings of SEASAR 2006.
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような従来の虚像検出方法は、アジマスアンビギュイティが側方からの反射波によって生じる特徴を利用したものである。このため、上記のような従来の虚像検出方法では、レンジアンビギュイティと呼ばれるレーダのビームの上方又は下方からの強い反射波による虚像や、干渉波と呼ばれる放送、通信又は他のレーダに利用される電波を受信したことによる虚像等を検出することができないという問題があった。従って、上記のような従来の虚像検出方法では、アジマスアンビギュイティ以外の種類の虚像については検出することはできなかった。
【0006】
この発明は、上記のような課題を解決するためになされたものであり、アジマスアンビギュイティ以外の種類の虚像についても検出対象とすることができるレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係るレーダ画像処理装置は、取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、前記コヒーレンス算出部によって算出されたコヒーレンスに基づいて、前記処理対象画像内にぼけ領域が存在するか否かを判断し、前記処理対象画像内にぼけ領域が存在すると判断した場合に、前記処理対象画像内に虚像が存在すると判断する虚像判断部とを備えるものである。
【発明の効果】
【0008】
この発明に係るレーダ画像処理装置によれば、コヒーレンス算出部が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とのコヒーレンスを算出し、虚像判断部が、コヒーレンスに基づいて処理対象画像内にぼけ領域が存在するか否かを判断し、処理対象画像内にぼけ領域が存在すると判断した場合に、処理対象画像内に虚像が存在すると判断するので、処理対象画像中に虚像が存在する場合に、その虚像についてのぼけ領域が存在する画素は分解能単位での周囲の画素との相関を有することにより、処理対象画像内のアジマスアンビギュイティ以外の種類の虚像についても検出することができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1によるレーダ画像処理装置を示すブロック図である。
【図2】レーダ画像の結像状態を説明するための説明図である。
【図3】図1のレーダ画像処理装置の動作を示すフローチャートである。
【図4】この発明の実施の形態2によるレーダ画像処理装置を示すブロック図である。
【図5】図4のレーダ画像処理装置の動作を示すフローチャートである。
【図6】この発明の実施の形態3によるレーダ画像処理装置を示すブロック図である。
【図7】図6の画像ぼけ解析部の解析処理に用いられる関数の一例を示すグラフである。
【図8】図6のレーダ画像処理装置の動作を示すフローチャートである。
【図9】この発明の実施の形態4によるレーダ画像処理装置を示すブロック図である。
【図10】図9の分解能推定部の推定処理に用いられる関数の一例を示すグラフである。
【図11】図9のレーダ画像処理装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、この発明を実施するための形態について、図面を参照して説明する。
実施の形態1.
図1は、この発明の実施の形態1によるレーダ画像処理装置を示すブロック図である。
図1において、レーダ画像処理装置100は、観測対象へアンテナ(図示せず)から電波を照射することによって得るレーダ画像を処理するものである。また、レーダ画像処理装置100は、レーダ画像格納部101、パラメータ格納部102、画像シフト処理部103、コヒーレンス算出部104、虚像判断部105及び判断結果格納部106を有している。
【0011】
レーダ画像格納部101には、前段の受信処理装置(図示せず)による受信処理を受けたレーダ画像(SAR画像:Synthetic Aperture Radar)の一部又は全部が処理対象画像として格納される。なお、このレーダ画像格納部101に格納される処理対象画像は、合成開口レーダの画像再生処理後のデータでもよく、その画像再生処理の途中のデータでもよい。
【0012】
パラメータ格納部102には、処理対象画像をずらす大きさであるシフト量や、処理対象画像をずらす方向等を表すシフトパラメータが予め格納されている。このシフトパラメータのシフト量は、1分解能以上が基本である。画像シフト処理部103は、パラメータ格納部102に格納されたシフトパラメータのシフト量に基づいて、レーダ画像格納部101に格納された処理対象画像をシフト(変位)する。コヒーレンス算出部104は、レーダ画像格納部101に格納されたシフト前の処理対象画像と、画像シフト処理部103によってシフトされたシフト後の処理対象画像とについて、相関の度合いを示すコヒーレンス(相関係数)を算出する。
【0013】
虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内にぼけ領域が存在しているか否かを判断する。また、虚像判断部105は、処理対象画像内にぼけ領域が存在していると判断した場合に、処理対象画像内に虚像が存在していると判断する。判断結果格納部106には、虚像判断部105によるぼけ領域の有無、又は虚像の有無についての判断結果が格納される。
【0014】
次に、レーダ画像の結像状態について説明する。レーダ画像処理装置100の検出対象とする虚像は、レーダの想定する観測対象領域の外に存在する物体が観測対象領域に投影されてなる像(即ちアンビギュイティ)や、放送波、通信波又は他のレーダ装置の送信波や妨害波等の干渉波が基となる像である。また、レーダの想定する観測対象領域とは、レーダで画像化したい領域であり、一般的には、アンテナのメインビームが照射された領域である。さらに、レーダ画像においては、像がぼけている場合を除いて、画像中の各地点の観測対象の情報が1分解能以内に収まるという特徴がある。
【0015】
図2は、レーダ画像の結像状態を説明するための説明図である。図2の点A,Bは、ぼけずに結像した像であり、図2の領域Cは、ぼけた像、即ちぼけ領域である。また、図2のレーダ画像は、x軸(例えばレンジ方向:距離方向)及びy軸(例えばアジマス方向:角度方向)の2軸の座標によって表されている。また、図2の格子の幅は、画像のx軸及びy軸のそれぞれの分解能の大きさである。
【0016】
図2において、レーダ画像中で、互いに1分解能以上離れた地点間でコヒーレンスを計算すると、像がぼけていない場合には、コヒーレンスがほぼ0となり、像がぼけている場合にはコヒーレンスが0よりも大きな値となる。また、レーダ画像の再生処理では、観測対象領域からの反射波のみを画像として結像するように(即ちぼけていない像となるように)処理される。このため、観測領域外の電波が基となるアンビギュイティは、ぼけた像としてレーダ画像中に現れる。
【0017】
さらに、レーダの送信波は、一定の方式・周波数で変調されており、画像再生の際には、受信波を復調して処理する。これに対して、虚像の基となる干渉波は、自身の送信波とは異なる方式・周波数で変調されている。このため、干渉波は、自身で復調できないため、干渉波による虚像は、アンビギュイティと同様に、レーダ画像中でぼけるという特性がある。なお、レーダ画像処理装置100の前段の受信処理装置において、観測領域内の自身の反射波についての受信処理が不完全な場合にも、レーダ画像中にぼけ領域が生じる。
【0018】
次に、コヒーレンス算出部104によるコヒーレンスの算出方法と、虚像判断部105による虚像又はぼけ領域の検出方法とについてより具体的に説明する。画像上の座標(x,y)の画素値をp(x,y)とし、x軸及びy軸方向のシフト量をそれぞれΔx及びΔyとした場合には、コヒーレンス算出部104は、次の式(1)を用いた演算を実行することによって、コヒーレンスγ(Δx,Δy)を算出する。
【0019】
【数1】
ただし、Aはコヒーレンスの算出範囲(処理対象範囲)であり、処理対象画像の一部の範囲又は全範囲である。*は複素共役である。
【0020】
そして、虚像判断部105は、コヒーレンス算出部104によって算出されたコヒーレンスに基づいて、処理対象画像内のぼけ領域の有無を判断する。具体的に、虚像判断部105は、コヒーレンスの値がほぼ0であることを確認した場合には、ぼけ領域が処理対象画像内に存在していないと判断する。他方、虚像判断部105は、コヒーレンスの値が0よりも大きいことを確認した場合には、処理対象画像内にぼけ領域が存在すると判断し、そのぼけ領域が虚像であると判断する。即ち、虚像判断部105は、コヒーレンスの値が0よりも大きいことを確認することによって、ぼけ領域及び虚像を検出する。
【0021】
従って、レーダ画像処理装置100は、コヒーレンスを用いてレーダ画像内のぼけ領域を検出することによって、アジマスアンビギュイティによる虚像のみならず、レンジアンビギュイティによる虚像や干渉波による虚像についても、検出対象とすることができる。
【0022】
ここで、ぼけ領域が処理対象画像内に存在していないと判断する(コヒーレンスがほぼ0であると判断する)基準については、レーダ画像利用者が経験に基づいて定めてもよいし、あるいは予め設定した閾値を用いてもよい。この閾値は、レーダ画像利用者が経験に基づいて設定してもよい。また、シミュレーションにより、虚像又はぼけ領域が存在しない場合のコヒーレンスを計算し、そのコヒーレンスの最大値、平均値又は標準偏差等の統計量を指標として用いて、閾値を設定してもよい。
【0023】
次に、動作について説明する。図3は、図1のレーダ画像処理装置100の動作を示すフローチャートである。まず、ステップS101では、画像シフト処理部103が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS102では、コヒーレンス算出部104が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスを算出する。
【0024】
続いて、ステップS103では、虚像判断部105が、コヒーレンス算出部104によって算出されたコヒーレンスの値から、処理対象画像内の虚像又はぼけ領域の有無を判断する。そして、ステップS104では、虚像判断部105が、処理対象画像内の虚像又はぼけ領域の有無についての判断結果を判断結果格納部106に格納(保存)する。これにより、レーダ画像処理装置100の動作が終了する。
【0025】
上記のような実施の形態1のレーダ画像処理装置100によれば、コヒーレンス算出部104が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とのコヒーレンスを算出する。そして、虚像判断部105が、コヒーレンスに基づいて処理対象画像内にぼけ領域が存在するか否かを判断し、処理対象画像内にぼけ領域が存在すると判断した場合に、処理対象画像内に虚像が存在すると判断する。この構成により、処理対象画像中に虚像が存在する場合に、その虚像についてのぼけた像が存在する画素は分解能単位での周囲の画素と相関を有することから、アジマスアンビギュイティ以外の種類の虚像、即ちレンジアンビギュイティや干渉波による虚像等についても検出対象とすることができる。
【0026】
また、判断結果格納部106に格納された処理対象画像内の虚像又はぼけ領域の有無についての判断結果は、レーダ画像処理装置100の後段の処理装置(図示せず)において、例えば処理対象画像からの虚像又はぼけ領域の除去処理等に用いることができる。
【0027】
ここで、非特許文献1に示すような従来の虚像検出方法では、側方から強い反射波を返す特性を持つ観測対象についても、虚像として誤って検出されるという問題があった。
これに対して、実施の形態1のレーダ画像処理装置100では、虚像判断部105が、処理対象画像内におけるぼけ領域の有無の判断結果に基づいて、処理対象画像内における虚像の有無を判断する。この構成により、側方から強い反射波を返す特性を持つ観測対象について、虚像として誤検出がされることを回避できる。
【0028】
また、非特許文献1に示すような従来の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側の画像をそれぞれ再生するか、又はビーム右側、ビーム中央及びビーム左側で受信した電波を全て用いて1枚の画像を再生した後に、その再生した1枚の画像をビーム右側、ビーム中央及びビーム左側の画像に分解する処理が必要であった。
これに加えて、非特許文献1に示すような従来の虚像検出方法では、ビーム右側、ビーム中央及びビーム左側の画像をそれぞれ作成した後に、それらを1画素以下の誤差で重ね合わせる必要がある。このため、ビーム右側、ビーム中央及びビーム左側の画像を作成しただけでは、例えば航空機の軌道が直線でない等のために1画素以上のずれが生じる場合があり、この場合にはそれぞれの画像を重ね合わせる処理が別途必要であった。
これに対して、実施の形態1のレーダ画像処理装置100では、画像の分解処理や、重ね合わせる処理が不要であることから、従来の虚像検出方法に比べて、処理負担を軽減させることができ、演算時間を短縮させることができる。
【0029】
さらに、レーダ画像利用者の目視により虚像を検出する方式では、画像上に虚像が比較的弱い信号強度でしか現れない場合があるため、その虚像については、レーダ画像利用者が虚像を目視により検出することが困難であった。
これに対して、実施の形態1のレーダ画像処理装置100では、信号処理によって虚像を検出するので、目視では困難な比較的弱い信号強度の虚像についても、検出対象とすることができる。
【0030】
なお、実施の形態1における式(1)のコヒーレンスに代えて、画像間の相関を計算する方法、例えば相関関数や変数変換した後に相関係数を計算する方法等を用いてもよい。
【0031】
また、実施の形態1の図3におけるステップS102を介さずに、座標(x,y)の画素と座標(x+Δx,y+Δy)の画素とのコヒーレンスを直接的に算出してもよい。ただし、虚像又は画像のぼけ領域を検出するためには、シフト量Δx及びΔyのうち、少なくともいずれか一方が分解能以上の値である必要がある。
【0032】
実施の形態2.
実施の形態1のレーダ画像処理装置100では、処理対象画像全体のシフト前後のコヒーレンスを用いることによって、処理対象画像内における虚像の有無を判断できるが、虚像又はぼけ領域の位置を特定することはできなかった。これに対して、実施の形態2のレーダ画像処理装置200では、処理対象画像のコヒーレンスに代えて、処理対象画像の各画素のコヒーレンス、即ち処理対象画像の局所的なコヒーレンスの分布であるコヒーレンスマップを作成し、そのコヒーレンスマップに基づいて、虚像又はぼけ領域の位置を特定可能となる。
【0033】
図4は、この発明の実施の形態2によるレーダ画像処理装置を示すブロック図である。図4において、実施の形態2のレーダ画像処理装置200の構成の概要は、実施の形態1のブロック構成と同様であるが、実施の形態1のコヒーレンス算出部104、虚像判断部105及び判断結果格納部106に代えて、図4のコヒーレンスマップ算出部204、虚像位置特定部205及び虚像分布格納部206を有している。
【0034】
コヒーレンスマップ算出部204は、レーダ画像格納部101に格納された処理対象画像と、画像シフト処理部103によるシフト後の処理対象画像とのコヒーレンスマップを算出(生成)する。虚像位置特定部205は、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップに基づいて、虚像の位置を特定する。虚像分布格納部206には、虚像位置特定部205によって特定した虚像の位置の情報が格納される。他の構成は、実施の形態1と同様である。
【0035】
次に、コヒーレンスマップ算出部204によるコヒーレンスマップの算出方法についてより具体的に説明する。コヒーレンスマップは、処理対象画像中の各画素において、その画素の周囲の画素とのコヒーレンスに基づいて作成される局所的なコヒーレンスの分布図である。コヒーレンスマップ算出部204は、演算対象画素の座標を(X,Y)とし、シフト量をΔx及びΔyとした場合における局所的なコヒーレンスγ(X,Y,Δx,Δy)について、次の式(2)を用いた演算を実行することによって算出できる。
【0036】
【数2】
ただし、Aは座標(X,Y)の周囲の画素の領域を示す。
【0037】
ここで、座標(X,Y)の周囲の画素の設定方法は様々あり、例えば、演算対象画素を中心とした上下左右及び斜め方向1画素ずつの領域である8近傍領域や、演算対象画素の縦方向の複数画素のみの領域や、演算対象画素の横方向の複数画素のみの領域や、演算対象画素を中心とする長方形状に設定した領域等が考えられる。また、座標(X,Y)の周囲の画素の設定方法は、処理対象画像内で一様である必要はなく、処理対象画像内の位置毎にその設定方法を適宜変更してもよい。
【0038】
次に、虚像位置特定部205による虚像又はぼけ領域の位置の特定方法についてより具体的に説明する。虚像位置特定部205は、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップの各画素の画素値(局所的なコヒーレンスの値)を確認する。そして、虚像位置特定部205は、コヒーレンスマップの各画素の画素値がほぼ0であることを確認した場合には、コヒーレンスマップの範囲内に虚像又はぼけ領域が存在しないものとして判断する。
【0039】
他方、虚像位置特定部205は、コヒーレンスマップの各画素の画素値が0よりも大きいことを確認した場合には、コヒーレンスマップの範囲内に虚像又はぼけ領域が存在していると判断する。また、虚像位置特定部205に、コヒーレンスマップの各画素の画素値に対する閾値が予め設定されていてもよい。この場合には、虚像位置特定部205は、コヒーレンスマップの各画素の画素値が閾値以上の値となる領域を、虚像又はぼけ領域の存在する位置として特定可能となる。
【0040】
この閾値については、レーダ画像利用者が経験に基づいて設定してもよい。また、コヒーレンスマップの画素値の出現確率分布(ヒストグラム)に基づいて閾値を設定してもよい。さらに、事前情報として虚像又は画像のぼけ領域が存在しない領域が判明している場合には、その判明している領域のコヒーレンスマップの画素値の最大値、平均値又は標準偏差等の統計量に基づいて閾値を設定してもよい。
【0041】
次に、動作について説明する。図5は、図4のレーダ画像処理装置200の動作を示すフローチャートである。図5において、ステップS201では、画像シフト処理部103が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS202では、コヒーレンスマップ算出部204が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスマップを算出する。
【0042】
続いて、ステップS203では、虚像位置特定部205が、コヒーレンスマップにおける各画素のコヒーレンスの値から虚像又はぼけ領域の位置を特定する。ステップS204では、虚像位置特定部205が、ステップS203で特定した虚像又はぼけ領域の位置である虚像分布を虚像分布格納部206に格納する。これにより、実施の形態2のレーダ画像処理装置200の動作が終了する。
【0043】
上記のような実施の形態2のレーダ画像処理装置200によれば、コヒーレンスマップ算出部204が、分解能を基本単位とするシフト量でのシフト後の処理対象画像と、シフト前の処理対象画像とから、コヒーレンスマップを算出する。この構成により、アジマスアンビギュイティ以外の種類の虚像についても検出対象とすることができるとともに、処理対象画像内に存在する虚像又は画像のぼけ領域の位置を特定することができる。
【0044】
また、虚像分布格納部206に格納された虚像分布の情報は、レーダ画像処理装置200の後段の処理装置(図示せず)において、実施の形態1と同様に、例えば処理対象画像からの虚像又はぼけ領域の除去処理等に用いることができる。さらに、虚像やぼけ領域についての位置表示に用いることもできる。また、虚像分布の情報から、虚像の種類を推定することもできる。例えば、レーダ画像のレンジ方向(距離方向)又はアジマス方向(角度方向)の軸に沿って直線状の虚像が存在する場合には、その虚像は干渉波によって生じたものであると推定できる。
【0045】
さらに、このコヒーレンスマップを表示機器に表示する場合には、処理対象画像内に存在する虚像又はぼけ領域について、レーダ画像利用者の目視によって特定することもできる。
【0046】
なお、実施の形態2における式(2)のコヒーレンスに代えて、実施の形態1の場合と同様に、画像間の相関を計算する方法、例えば相関関数や変数変換した後に相関係数を計算する方法等を用いてもよい。
【0047】
また、実施の形態2の図5におけるステップS202を介さずに、座標(x,y)の画素と座標(x+Δx,y+Δy)の画素とのコヒーレンスマップを直接的に算出してもよい。ただし、虚像又は画像のぼけ領域を検出するためには、シフト量Δx及びΔyのうち、少なくともいずれか一方が分解能以上の値である必要がある。
【0048】
さらに、実施の形態2におけるコヒーレンスマップ算出部204を実施の形態1におけるレーダ画像処理装置100に追加してもよい。この場合には、コヒーレンスマップ算出部204によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布(ヒストグラム)に基づいて閾値を設定し、その設定した閾値を用いて、虚像判断部105が処理対象画像内に虚像が存在するか否かを判断してもよい。
【0049】
実施の形態3.
実施の形態1のレーダ画像処理装置100は、処理対象画像内における虚像又はぼけ領域の有無を判断し、実施の形態2のレーダ画像処理装置200は、処理対象画像内で虚像又はぼけ領域が存在している領域を特定した。これに対して、実施の形態3のレーダ画像処理装置300は、処理対象画像内に存在する虚像又はぼけ領域の広がり方向及び大きさ(ぼけ具合)を解析する。
【0050】
図6は、この発明の実施の形態3によるレーダ画像処理装置を示すブロック図である。図6において、実施の形態3のレーダ画像処理装置300は、レーダ画像格納部301、パラメータ格納部302、画像シフト処理部303、コヒーレンス算出部304、シフト量対相関対応部305、画像ぼけ解析部306及び解析結果格納部307を有している。レーダ画像格納部301、パラメータ格納部302、画像シフト処理部303及びコヒーレンス算出部304の構成は、実施の形態1の各機能ブロック101〜104の構成と同様である。
【0051】
シフト量対相関対応部305は、コヒーレンス算出部304によって算出されたコヒーレンスの値と、そのコヒーレンスの算出に用いられたシフトパラメータとを、コヒーレンス算出部304及びパラメータ格納部302から受ける。また、シフト量対相関対応部305は、コヒーレンス算出部304によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報として保存する。
【0052】
さらに、シフト量対相関対応部305は、シフト量対相関情報を保存した後に、未だコヒーレンスを計算していないシフトパラメータ(即ち、シフト量及びシフト方向)にパラメータ格納部302に格納されたシフトパラメータを変更し、処理対象画像についてのシフト量及びシフト方向を変更する。このシフト量の変更する範囲については、予め設定された範囲であり、x軸及びy軸のそれぞれの分解能を最小単位とする範囲である。また、シフト量対相関対応部305は、シフトパラメータを変更した後に、画像シフト処理部303及びコヒーレンス算出部304にそれぞれの処理を繰り返し実行させる。
【0053】
画像ぼけ解析部306は、シフト量対相関対応部305からシフト量対相関情報を受ける。また、画像ぼけ解析部306は、シフト量対相関情報に基づいて、処理対象画像内に存在する虚像又はぼけ領域の広がり方向及びぼけ具合を解析する。解析結果格納部307には、画像ぼけ解析部306による解析結果が格納される。
【0054】
次に、画像ぼけ解析部306による解析方法についてより具体的に説明する。画像ぼけ解析部306は、例えば、図7に示すような一次元の関数、シフト量を2軸とした2次元の関数、シフト量若しくはコヒーレンスを変数変換して作成した関数、又はシフト量毎のコヒーレンスの計算結果から算出した統計量等を用いて、処理対象画像内の虚像又はぼけ領域の存在する方向及びぼけ具合を解析する。ここでは、図7の例を用いて説明する。
【0055】
画像ぼけ解析部306は、ぼけ領域の広がり方向について解析する場合には、画像の軸xのシフト量Δxについて、図7のコヒーレンスの関数を計算した結果と、軸yのシフト量Δyについてコヒーレンスの関数を計算した結果とを作成する。ただし、この際のシフト量の基本単位は各軸方向の画像の分解能とする(例えば分解能の2倍等としてグラフの横軸を標記する)。そして、画像ぼけ解析部306は、Δxに比べてΔyの方がコヒーレンスの低下度合いが小さいことを確認した場合には、y軸方向にぼけ領域が広がっていると判断できる。
【0056】
また、画像ぼけ解析部306は、ぼけ領域の大きさについて解析する場合には、図7に示すような閾値を用いる。即ち、画像ぼけ解析部306は、閾値をコヒーレンスが下回ったときのシフト量をぼけ領域の大きさとして解析できる。この閾値については、処理の実施者の経験に基づいても設定してもよい。あるいは、実施の形態2の虚像位置特定結果から虚像が存在していない領域を求め、その領域のコヒーレンスの平均値や分散等の統計量に基づいて設定してもよい。
【0057】
次に、動作について説明する。図8は、図6のレーダ画像処理装置300の動作を示すフローチャートである。図8において、ステップS301では、画像シフト処理部303が、処理対象画像を、シフト量に合わせてシフトする。この後、ステップS302では、コヒーレンス算出部304が、シフト前の処理対象画像と、シフト後の処理対象画像とのコヒーレンスを算出する。
【0058】
続いて、ステップS303では、シフト量対相関対応部305が、コヒーレンス算出部304によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報として保存する。そして、ステップS304では、シフト量対相関対応部305が、シフト量及びシフト方向を更新する。ここで、予め定められた範囲内でシフト量及びシフト方向毎に、ステップS301〜S304の演算処理が繰り返し実行される。
【0059】
ステップS301〜S304の演算処理が終了した後に、ステップS305の演算処理に移行する。ステップS305では、画像ぼけ解析部306が、シフト量対相関情報に基づいて、ぼけ領域の広がり方向及び大きさを解析する。ステップS306では、画像ぼけ解析部306が、ステップS305での解析結果の情報を解析結果格納部307に格納する。これにより、実施の形態3のレーダ画像処理装置300の動作が終了する。
【0060】
上記のような実施の形態3のレーダ画像処理装置300によれば、画像ぼけ解析部306が、シフト量対相関対応部305からのシフト量対相関情報に基づいて、処理対象画像内に存在するぼけ領域の広がり方向及び大きさを解析する。この構成により、画像ぼけ解析部306の解析結果の情報を用いて、虚像の分類(類別)をすることが可能となる。例えば、レンジ方向又はアジマス方向に一様なぼけ領域が処理対象画像内に存在する場合には、そのぼけ領域は干渉波によって生じた虚像であると推定することができる。
【0061】
また、解析結果格納部307に格納された解析結果の情報は、レーダ画像処理装置300の後段の処理装置(図示せず)において、例えば処理対象画像からの虚像又はぼけ領域の除去処理や、画像補正処理等に用いることができる。さらに、解析結果格納部307に格納された解析結果の情報のうちぼけ領域の大きさの情報は、レーダ画像処理装置300の後段のオートフォーカス処理装置(図示せず)において、ぼけ領域の大きさを動作パラメータとするレーダのオートフォーカス処理に用いることができる。
【0062】
実施の形態4.
実施の形態1〜3では、レーダ画像の分解能が既知情報であることが処理の前提条件であった。これに対して、実施の形態4では、レーダ画像の分解能が未知情報である場合に、分解能推定部406によって分解能が推定される。
【0063】
図9は、この発明の実施の形態4によるレーダ画像処理装置を示すブロック図である。図9において、実施の形態4のレーダ画像処理装置400の構成は、シフト量の基本単位が距離である点と、レーダ画像処理装置300の画像ぼけ解析部306及び解析結果格納部307に代えて分解能推定部406及び分解能推定値格納部407を有する点とを除いて、実施の形態3のレーダ画像処理装置300の構成と同様である。即ち、実施の形態4のレーダ画像処理装置400では、実施の形態3のレーダ画像処理装置300の機能ブロック301〜305が分解能推定用の機能ブロックとされる。
【0064】
分解能推定部406は、シフト量対相関対応部305からシフト量対相関情報を受ける。また、分解能推定部406は、シフト量対相関情報に基づいて、レーダ画像の分解能を推定する。具体的に、分解能推定部406は、図10に示すようなシフト量とコヒーレンスとの関係を表すグラフを作成する。この図10のグラフと、実施の形態3における図7のグラフとの相違点は、シフト量の単位を分解能ではなく距離(例えばメートル単位)とした点である。
【0065】
分解能推定部406は、コヒーレンスが予め設定された閾値を下回ったときのシフト量を分解能として推定できる。この閾値の設定方法は、実施の形態3と同様である。分解能推定値格納部407には、分解能推定部406による分解能の推定値が格納される。なお、図11は、図9のレーダ画像処理装置400の動作を示すフローチャートであり、レーダ画像処理装置400の動作の概要としては、実施の形態3のレーダ画像処理装置300の動作と同様である。
【0066】
上記のような実施の形態4のレーダ画像処理装置400によれば、分解能推定部406が、シフト量対相関対応部305からのシフト量対相関情報に基づいて、レーダ画像の分解能を推定する。この構成により、レーダ画像の分解能が未知情報である場合に、処理対象画像から分解能を推定することが可能になる。
【0067】
なお、実施の形態4のレーダ画像処理装置400の構成と、実施の形態1〜3のレーダ画像処理装置100〜300のそれぞれとの構成を組み合わせてもよい。このように組み合わせた構成では、分解能が未知情報である場合にも、レーダ画像処理装置100〜300が、レーダ画像処理装置400によって算出された分解能を基本単位とするシフト量を用いて、虚像若しくはぼけ領域の検出、位置特定又は解析を行うことができる。
【符号の説明】
【0068】
100〜400 レーダ画像処理装置、101,301 レーダ画像格納部、102,302 パラメータ格納部、103,303 画像シフト処理部、104,304 コヒーレンス算出部、105 虚像判断部、106 判断結果格納部、204 コヒーレンスマップ算出部、205 虚像位置特定部、206 虚像分布格納部、305 シフト量対相関対応部、306 画像ぼけ解析部、307 解析結果格納部、406 分解能推定部、407 分解能推定値格納部。
【特許請求の範囲】
【請求項1】
取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスに基づいて、前記処理対象画像内にぼけ領域が存在するか否かを判断し、前記処理対象画像内にぼけ領域が存在すると判断した場合に、前記処理対象画像内に虚像が存在すると判断する虚像判断部と
を備えることを特徴とするレーダ画像処理装置。
【請求項2】
前記虚像判断部は、前記コヒーレンス算出部によって算出されたコヒーレンスが所定の閾値を超えた場合に、前記処理対象画像内に虚像が存在すると判断する
ことを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とから、前記処理対象画像における各画素と、前記各画素の周囲の画素とについてのコヒーレンスの分布であるコヒーレンスマップを算出するコヒーレンスマップ算出部
をさらに備え、
前記虚像判断部は、前記コヒーレンスマップ算出部によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布に基づいて閾値を定め、その定めた閾値を前記所定の閾値に代えて用いて、前記処理対象画像内に虚像が存在するか否かを判断する
ことを特徴とする請求項2記載のレーダ画像処理装置。
【請求項4】
取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とから、前記処理対象画像における各画素と、前記各画素の周囲の画素とについてのコヒーレンスの分布であるコヒーレンスマップを算出するコヒーレンスマップ算出部と、
前記処理対象画像内に虚像が存在する場合に、前記コヒーレンスマップに基づいて、前記処理対象領域内に存在する虚像の位置を特定する虚像位置特定部と
を備えることを特徴とするレーダ画像処理装置。
【請求項5】
前記虚像位置特定部は、前記コヒーレンスマップの画素値が所定の閾値を超えた画素について、虚像であると判断し、前記処理対象領域内の虚像の位置を特定する
ことを特徴とする請求項4記載のレーダ画像処理装置。
【請求項6】
前記虚像位置特定部は、前記コヒーレンスマップ算出部によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布に基づいて閾値を定め、その定めた閾値を前記所定の閾値に代えて用いて、前記コヒーレンスマップ内の前記処理対象領域内の虚像の位置を特定する
ことを特徴とする請求項5記載のレーダ画像処理装置。
【請求項7】
取得したレーダ画像の一部及び全部のいずれかである処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記シフト処理部及び前記コヒーレンス算出部にそれぞれの処理を繰り返し実行させるシフト量対相関対応部と、
前記シフト量対相関対応部からの前記シフト量対相関情報に基づいて、前記処理対象画像内に存在するぼけ領域の広がり方向及び大きさを解析する画像ぼけ解析部と
を備えることを特徴とするレーダ画像処理装置。
【請求項8】
前記画像ぼけ解析部は、前記シフト量対相関情報におけるシフト量及びコヒーレンスの関係を示す関数を、前記2軸のそれぞれの軸方向について算出し、その算出した関数の組に基づいて前記処理対象画像に存在するぼけ領域の方向及び大きさを解析する
ことを特徴とする請求項7記載のレーダ画像処理装置。
【請求項9】
前記シフト処理部は、画像処理用のシフト処理部であり、
前記処理対象画像について、距離を基本単位とする予め設定されたシフト量に基づいて、前記2軸の少なくともいずれか一方の軸方向へシフトする分解能推定用のシフト処理部と、
前記分解能推定用のシフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出する分解能推定用のコヒーレンス算出部と、
前記分解能推定用のコヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けて分解能推定用のシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記分解能推定用のシフト処理部、及び前記分解能推定用のコヒーレンス算出部にそれぞれの処理を繰り返し実行させる分解能推定用のシフト量対相関対応部と、
前記分解能推定用のシフト量対相関対応部からの前記分解能推定用のシフト量対相関情報に基づいて、前記レーダ画像の分解能を推定する分解能推定部と
をさらに備え、
前記画像処理用のシフト処理部は、前記分解能推定部によって推定された分解能を基本単位とするシフト量に基づいて、前記処理対象画像を前記2軸の少なくともいずれか一方の軸方向へシフトする
ことを特徴とする請求項1から請求項8までのいずれか1項に記載のレーダ画像処理装置。
【請求項10】
取得したレーダ画像の一部及び全部のいずれかである処理対象画像について、距離を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記シフト処理部及び前記コヒーレンス算出部にそれぞれの処理を繰り返し実行させるシフト量対相関対応部と、
前記シフト量対相関対応部からの前記シフト量対相関情報に基づいて、前記レーダ画像の分解能を推定する分解能推定部と
を備えることを特徴とするレーダ画像処理装置。
【請求項1】
取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスに基づいて、前記処理対象画像内にぼけ領域が存在するか否かを判断し、前記処理対象画像内にぼけ領域が存在すると判断した場合に、前記処理対象画像内に虚像が存在すると判断する虚像判断部と
を備えることを特徴とするレーダ画像処理装置。
【請求項2】
前記虚像判断部は、前記コヒーレンス算出部によって算出されたコヒーレンスが所定の閾値を超えた場合に、前記処理対象画像内に虚像が存在すると判断する
ことを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とから、前記処理対象画像における各画素と、前記各画素の周囲の画素とについてのコヒーレンスの分布であるコヒーレンスマップを算出するコヒーレンスマップ算出部
をさらに備え、
前記虚像判断部は、前記コヒーレンスマップ算出部によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布に基づいて閾値を定め、その定めた閾値を前記所定の閾値に代えて用いて、前記処理対象画像内に虚像が存在するか否かを判断する
ことを特徴とする請求項2記載のレーダ画像処理装置。
【請求項4】
取得したレーダ画像の一部及び全部のいずれか一方である処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とから、前記処理対象画像における各画素と、前記各画素の周囲の画素とについてのコヒーレンスの分布であるコヒーレンスマップを算出するコヒーレンスマップ算出部と、
前記処理対象画像内に虚像が存在する場合に、前記コヒーレンスマップに基づいて、前記処理対象領域内に存在する虚像の位置を特定する虚像位置特定部と
を備えることを特徴とするレーダ画像処理装置。
【請求項5】
前記虚像位置特定部は、前記コヒーレンスマップの画素値が所定の閾値を超えた画素について、虚像であると判断し、前記処理対象領域内の虚像の位置を特定する
ことを特徴とする請求項4記載のレーダ画像処理装置。
【請求項6】
前記虚像位置特定部は、前記コヒーレンスマップ算出部によって算出されたコヒーレンスマップにおけるコヒーレンスの出現確率分布に基づいて閾値を定め、その定めた閾値を前記所定の閾値に代えて用いて、前記コヒーレンスマップ内の前記処理対象領域内の虚像の位置を特定する
ことを特徴とする請求項5記載のレーダ画像処理装置。
【請求項7】
取得したレーダ画像の一部及び全部のいずれかである処理対象画像について、分解能を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記シフト処理部及び前記コヒーレンス算出部にそれぞれの処理を繰り返し実行させるシフト量対相関対応部と、
前記シフト量対相関対応部からの前記シフト量対相関情報に基づいて、前記処理対象画像内に存在するぼけ領域の広がり方向及び大きさを解析する画像ぼけ解析部と
を備えることを特徴とするレーダ画像処理装置。
【請求項8】
前記画像ぼけ解析部は、前記シフト量対相関情報におけるシフト量及びコヒーレンスの関係を示す関数を、前記2軸のそれぞれの軸方向について算出し、その算出した関数の組に基づいて前記処理対象画像に存在するぼけ領域の方向及び大きさを解析する
ことを特徴とする請求項7記載のレーダ画像処理装置。
【請求項9】
前記シフト処理部は、画像処理用のシフト処理部であり、
前記処理対象画像について、距離を基本単位とする予め設定されたシフト量に基づいて、前記2軸の少なくともいずれか一方の軸方向へシフトする分解能推定用のシフト処理部と、
前記分解能推定用のシフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出する分解能推定用のコヒーレンス算出部と、
前記分解能推定用のコヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けて分解能推定用のシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記分解能推定用のシフト処理部、及び前記分解能推定用のコヒーレンス算出部にそれぞれの処理を繰り返し実行させる分解能推定用のシフト量対相関対応部と、
前記分解能推定用のシフト量対相関対応部からの前記分解能推定用のシフト量対相関情報に基づいて、前記レーダ画像の分解能を推定する分解能推定部と
をさらに備え、
前記画像処理用のシフト処理部は、前記分解能推定部によって推定された分解能を基本単位とするシフト量に基づいて、前記処理対象画像を前記2軸の少なくともいずれか一方の軸方向へシフトする
ことを特徴とする請求項1から請求項8までのいずれか1項に記載のレーダ画像処理装置。
【請求項10】
取得したレーダ画像の一部及び全部のいずれかである処理対象画像について、距離を基本単位とする予め設定されたシフト量に基づいて、前記レーダ画像を表すための2軸の少なくともいずれか一方の軸方向へシフトするシフト処理部と、
前記シフト処理部によるシフト後の前記処理対象画像と、そのシフト前の前記処理対象画像とのコヒーレンスを算出するコヒーレンス算出部と、
前記コヒーレンス算出部によって算出されたコヒーレンスと、そのコヒーレンスの算出の際に用いられたシフト量とを互いに対応付けてシフト量対相関情報とするとともに、前記処理対象画像についてのシフト量及びシフト方向を変更して、前記シフト処理部及び前記コヒーレンス算出部にそれぞれの処理を繰り返し実行させるシフト量対相関対応部と、
前記シフト量対相関対応部からの前記シフト量対相関情報に基づいて、前記レーダ画像の分解能を推定する分解能推定部と
を備えることを特徴とするレーダ画像処理装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−112630(P2011−112630A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−272323(P2009−272323)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]