
レーダ画像処理装置
【課題】従来のセンサと対象物のアジマス方向およびエレベーション方向の角度、距離からの高度情報による樹木頂点の検出手法、またDSMと、DEMの差から高度情報を得、各画素の高度差を用いた樹冠領域抽出方法は、何れも低SNR下での高度情報誤検出発生時は、樹木の誤抽出を引き起こす可能性が高い。
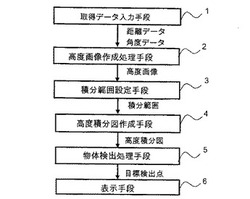
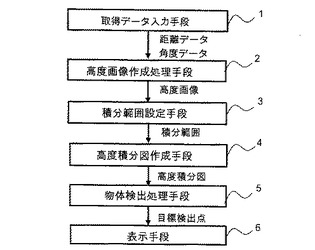
【解決手段】移動体搭載のレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行い、表示手段が観測対象物体が存在する画素または実空間上の位置を表示する。
【解決手段】移動体搭載のレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行い、表示手段が観測対象物体が存在する画素または実空間上の位置を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、移動体に搭載されたレーダにより、任意領域を観測し、観測領域内の各観測地点における観測対象物体とレーダとの距離値と、観測対象物体とレーダとのアジマス方向角度及びエレベーション方向角度から観測対象物体を検出するレーダ画像処理装置に関する。
【背景技術】
【0002】
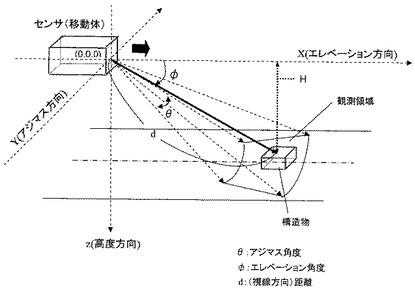
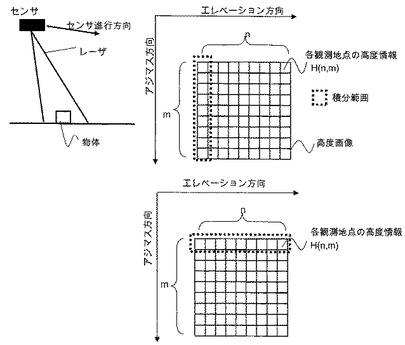
この発明は、任意領域を観測するとともに、レーダから観測領域内の各観測地点までの距離値と、そのアジマス方向及びエレベーション方向角度を得ることができるレーザレーダを対象とする。ただし、同様のデータが得られるものであれば、レーザレーダに限るものではない。以降では、図1に示すように、移動体にレーザレーダを搭載し(以下、センサと表す)、センサが3次元の任意方向に移動しながらアジマス方向にビーム走査し、下方の領域を観測する場合を例に、この発明の内容を説明する。
ある観測対象物体を計測したときの、センサとアジマス方向の角度をθ、センサとエレベーション方向の角度をφ、センサとの(視線方向)距離をdとすると、観測対象物体のセンサとの高度差Hは式1により得ることができる。
【0003】
H=d・cos(90-φ)cos(θ) ・・・ 式1
【0004】
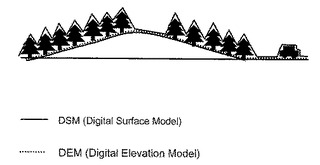
特開2009−22278号公報(特許文献1)には、このようにして得られる高度情報の勾配を利用して樹木の頂点を検出する手法が示されている。また、「高解像度光学センサ衛星画像とLiDAR データを組み合わせた森林域の冠雪害検出手法の開発」写真測量とリモートセンシング(非特許文献1)においては図2に示すようなDSM(Digital Surface Model)と、DEM(Digital Elevation Model)の差から高度情報を得、各画素の高度差を用いることによって、樹冠領域の抽出を行っている技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−22278号公報、「樹木頂点認識方法及び樹木頂点認識装置並びに樹木頂点認識のプログラム」
【非特許文献】
【0006】
【非特許文献1】田口仁、 臼田裕一郎、 福井弘道、 古川邦明、 (2006)「高解像度光学センサ衛星画像とLiDAR データを組み合わせた森林域の冠雪害検出手法の開発」写真測量とリモートセンシング、 Vol. 45、 No. 1、 pp. 14−21.
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記のような方法は、SNR(Signal to Noise Ratio)が良い、すなわち、高度情報が適切に得られていることを前提としており、低SNR下において高度情報の誤検出が発生した場合、樹木の誤抽出を引き起こす可能性が高い。
【0008】
この発明は上述のような課題を解決するためになされたもので、低SNR下においても、高度情報を積分することにより、精度良く樹木またはその他物体を検出することができるレーダ画像を得ることを目的とする。
【課題を解決するための手段】
【0009】
この発明に係るレーダ画像処理装置は、
移動体に搭載されたレーダにより、所定の観測領域内に存在する観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を得、観測対象物体の検出を行うものにおいて、上記距離と両角度を用いて、各画素の所定の基準からの高度値を算出し高度画像を生成する高度画像作成処理手段と、高度値を積分する範囲を決定する積分範囲設定手段と、上記積分範囲内の高度値を積分して高度積分図を作成する高度積分図作成手段と、上記高度積分図を基に観測対象物体の検出を行う物体検出処理手段と、観測対象物体が存在する画素または実空間上の位置を出力する表示手段を備える。
【発明の効果】
【0010】
この発明に係るレーダ画像処理装置によれば、移動体に搭載されたレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行うので、低SNRでの誤測距による急激な高度値の変動に起因する誤検出の影響を低減できる効果がある。
また、高度積分図作成手段が高度値を積分する範囲を積分範囲設定手段で決定するので、大きさの異なる複数目標を検出できる効果もある。
【図面の簡単な説明】
【0011】
【図1】移動体搭載のレーザレーダで下方領域を観測する観測系の説明図である。
【図2】DSMと、DEM差からの高度情報を得、各画素の高度差を用い、樹冠領域抽出を行う手法の説明図である。
【図3】この発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
【図4】図1の観測系で、センサが下方に向かって飛行しながら観測作成した高度画像図である。
【図5】高度積分図作成手段で作成された高度積分図である。
【図6】図5の高度積分図の説明図である。
【図7】上段は高度積分図、下段は観測対象物体の存在領域を示す高度差分図である。
【図8】アジマス方向とエレベーション方向の物体検出列を組合せた物体存在領域特定説明図である。
【図9】観測対象物体に応じた設定積分範囲を単位としてアジマス方向にずらす物体領域検出手法の説明図である。
【図10】観測対象物体対応の設定積分範囲をアジマス方向とエレベーション方向の2次元し、設定積分範囲を単位としてずらす物体領域検出手法の説明図である。
【発明を実施するための形態】
【0012】
実施の形態1.
図3はこの発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
1は、観測領域内における観測対象物体とセンサとの距離データ及び観測対象物体とセンサとのアジマス方向及びエレベーション方向の角度データを得る取得データ入力手段、
2は、取得データ入力手段1で得られた距離データ及びアジマス方向及びエレベーション方向の角度データを用いて高度画像を作成する高度画像作成処理手段、
3は、高度画像作成処理手段2で作成された高度画像から高度積分図を作成する領域を切り出し設定する積分範囲設定手段、
4は、積分範囲設定手段3で設定された領域において高度値を積分する高度積分図作成手段、
5は、高度積分図作成手段4で作成された高度積分図において観測対象物体の検出処理を行う物体検出処理手段、
6は、物体検出処理手段5で検出された観測対象物体が存在する画像上の座標、及び、実空間における位置を表示する表示部である。
【0013】
次に動作について説明する。
取得データ入力部1では、観測領域の所定観測点におけるビーム走査方向であるアジマス方向角度、エレベーション方向角度の角度データと、その角度における距離データを取得する。以下では、ここで得られるデータを取得データと呼ぶ。
【0014】
高度画像作成処理部2では、取得データ入力部1で得られた角度データ及び距離データを用いて高度画像を作成する。図1の観測系において、ある観測対象物体の座標を(x、y、z)とすると、zすなわちセンサから観測対象物体までの高度Hは上述の式1で得ることができる。
【0015】
積分範囲設定手段3では、後段の高度積分図作成手段4において用いる領域を設定する。図4は、図1のような観測系でセンサが下方に向かって飛行しながら観測を行った結果から高度画像作成処理手段2が作成した高度画像を表す。各画素には各観測地点の高度情報が与えられており、画像上下方向(以降アジマス方向と呼ぶ)にm画素、画像左右方向(以降エレベーション方向と呼ぶ)にn画素あるとする。積分範囲設定手段3では、積分範囲をアジマス方向全ての画素とする。ただし、以降の説明では、積分範囲をアジマス方向として行うが、積分範囲はエレベーション方向にしても良い。従来の装置では、低SNR時においては、雑音信号により、正確な距離測定を行うことができない。しかし、この発明では高度値を積分することにより、低SNRでの誤測距による急激な高度値の変動に起因する誤検出の影響を低減できるメリットが挙げられる。
また、センサがアジマス方向にビームを走査しながら移動していく場合において、アジマス方向の高度値の積分を行うことにより、リアルタイムに観測対象物体の有無または観測対象物体の頂点を検出することができるメリットをもつ。
【0016】
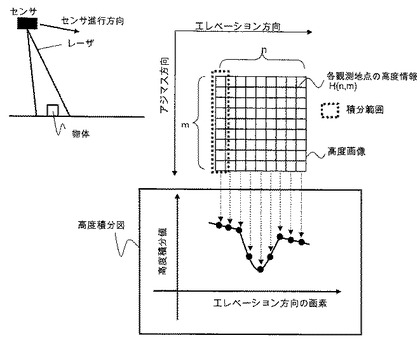
高度積分図作成手段4では、エレベーション方向の画素ごとに積分範囲設定手段3において設定されたアジマス方向全ての画素値(高度値)の総和をとり、その値を、エレベーション方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成する。図5は、高度積分図作成手段4による高度積分図の作成例を示す。
【0017】
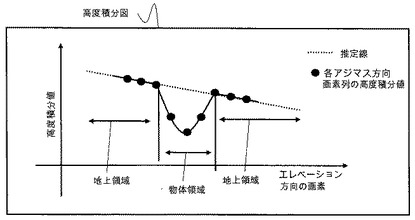
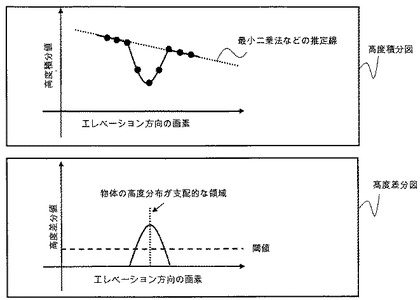
物体検出処理手段5について説明する。図6は高度積分図作成手段4により得られた図5の高度積分図についての説明図である。図5の高度値Hはセンサと観測対象物体との高度差を表しており、観測対象物体の高度が高ければ高いほど得られるHの値は小さくなる。そのため、図6では高度積分値が減少している部分が、観測対象物体が存在する領域を表し、その他は地上領域を表す図となっている。物体領域のみを抽出するために、最小二乗法などの手法により地上部の推定線を算出する。ただし、同様の機能があれば最小二乗法などの本手法に限るものではない。もしもSNRが低い状況の場合は、推定線を作成する前に移動平均やメディアン処理などによって、高度値Hの平滑化を行う。平滑化処理に関しては、同等の効果がある手法ならば左記に挙げた処理に限るものではない。ただし,SNRが高い状況の場合は、本処理は必要なく、計算量低減のために本処理を省略する。
【0018】
図7上段に高度積分図、下段に推定線と高度積分値との差分をとった高度差分図を示す。図7下段の凸領域は物体の存在する領域を示し、もっとも高度差分値が大きい値を持つ画素、または任意閾値以上の極大値を目標点として検出する。
【0019】
表示手段6では、物体検出処理手段5で得られた検出点を高度画像上に表示する。
【0020】
実施の形態2.
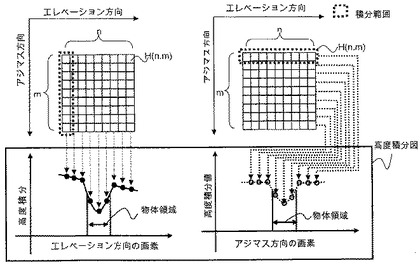
実施の形態1においては、アジマス方向またはエレベーション方向のどちらか1方向のみの結果を用いて目標が存在する列を抽出したが、図8のようにアジマス方向およびエレベーション方向それぞれにおいて、実施の形態1のようにエレベーション方向の画素ごとにアジマス方向全ての画素値(高度値)の総和をとり、その値を、エレベーション方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成し、またアジマス方向の画素ごとにエレベーション方向全ての画素値(高度値)の総和をとり、その値を、アジマス方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成する処理をして観測対象物体検出を行い、アジマス方向と、エレベーション方向の物体検出列を組合せることにより、観測対象物体の存在する領域を特定することも可能である。その組合せ方として、アジマス方向とエレベーション方向の2種の高度積分図がそれぞれ任意閾値よりも低い画素、またはそれぞれ高度積分値の最大極大値となる画素またはそれぞれ任意閾値以下の極大値を観測対象物体画素として検出する。
【0021】
実施の形態3.
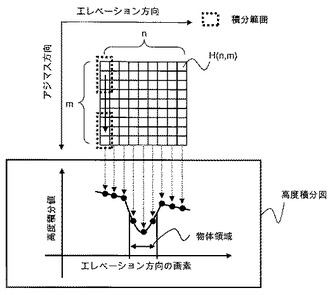
図9に示すように、積分範囲設定手段3において積分範囲を抽出したい観測対象物体の大きさに設定し、アジマス方向またはエレベーション方向に設定した積分範囲を単位としてずらしていく手法が挙げられる。アジマス方向にずらした場合、ずらすことによって得られたm個の高度積分値の中で、最も値が小さいものを抽出する。n個の高度積分値を高度積分図作成手段4や物体検出処理手段5に渡し、実施の形態1同様に観測対象物体検出を行う。このような方法によって、所望とする大きさの観測対象物体の頂点を抽出することが可能となる。
この手法はエレベーション方向に積分範囲を設定しても同様の処理を行うことが可能である。また、大きさの異なる複数目標を検出できるメリットがある。
【0022】
また、観測対象物体の大きさが不明の場合、この積分範囲を可変にし、積分範囲を変えながら繰返し計算を行わせることも可能である。その場合、物体検出処理手段5において、高度差分値が最も大きくなる積分範囲のデータを採用し、その際の検出結果を表示手段6に渡すことが可能である。
【0023】
実施の形態4.
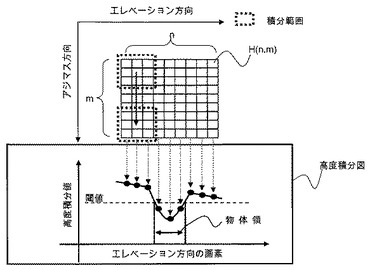
観測対象物体の大きさが空間的に既知の場合、積分範囲設定手段3において、図10のように積分範囲を2次元にすることが可能である。これにより、実施の形態3よりもよりユーザが所望する観測対象物体のみを抽出することが可能となる。実施の形態1〜3同様、各エレベーション方向において高度積分値を取得し、高度積分図作成手段4や物体検出処理手段5において観測対象物体の検出を行う。
【産業上の利用可能性】
【0024】
この発明によるレーダ画像処理装置は航空機から地上に向けてレーダビームを放射し地表面や樹木またはその他物体で反射し戻ったビームからデータを取得し、樹木やその他物体の観測対象物体を検出するシステム、例えば森林域計測や冠雪害検出システムなどへの適用が可能である。
【符号の説明】
【0025】
1;取得データ入力手段、2;高度画像作成処理手段、3;積分範囲設定手段、4;高度積分図作成手段、5;物体検出処理手段、6;表示部。
【技術分野】
【0001】
この発明は、移動体に搭載されたレーダにより、任意領域を観測し、観測領域内の各観測地点における観測対象物体とレーダとの距離値と、観測対象物体とレーダとのアジマス方向角度及びエレベーション方向角度から観測対象物体を検出するレーダ画像処理装置に関する。
【背景技術】
【0002】
この発明は、任意領域を観測するとともに、レーダから観測領域内の各観測地点までの距離値と、そのアジマス方向及びエレベーション方向角度を得ることができるレーザレーダを対象とする。ただし、同様のデータが得られるものであれば、レーザレーダに限るものではない。以降では、図1に示すように、移動体にレーザレーダを搭載し(以下、センサと表す)、センサが3次元の任意方向に移動しながらアジマス方向にビーム走査し、下方の領域を観測する場合を例に、この発明の内容を説明する。
ある観測対象物体を計測したときの、センサとアジマス方向の角度をθ、センサとエレベーション方向の角度をφ、センサとの(視線方向)距離をdとすると、観測対象物体のセンサとの高度差Hは式1により得ることができる。
【0003】
H=d・cos(90-φ)cos(θ) ・・・ 式1
【0004】
特開2009−22278号公報(特許文献1)には、このようにして得られる高度情報の勾配を利用して樹木の頂点を検出する手法が示されている。また、「高解像度光学センサ衛星画像とLiDAR データを組み合わせた森林域の冠雪害検出手法の開発」写真測量とリモートセンシング(非特許文献1)においては図2に示すようなDSM(Digital Surface Model)と、DEM(Digital Elevation Model)の差から高度情報を得、各画素の高度差を用いることによって、樹冠領域の抽出を行っている技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2009−22278号公報、「樹木頂点認識方法及び樹木頂点認識装置並びに樹木頂点認識のプログラム」
【非特許文献】
【0006】
【非特許文献1】田口仁、 臼田裕一郎、 福井弘道、 古川邦明、 (2006)「高解像度光学センサ衛星画像とLiDAR データを組み合わせた森林域の冠雪害検出手法の開発」写真測量とリモートセンシング、 Vol. 45、 No. 1、 pp. 14−21.
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、上記のような方法は、SNR(Signal to Noise Ratio)が良い、すなわち、高度情報が適切に得られていることを前提としており、低SNR下において高度情報の誤検出が発生した場合、樹木の誤抽出を引き起こす可能性が高い。
【0008】
この発明は上述のような課題を解決するためになされたもので、低SNR下においても、高度情報を積分することにより、精度良く樹木またはその他物体を検出することができるレーダ画像を得ることを目的とする。
【課題を解決するための手段】
【0009】
この発明に係るレーダ画像処理装置は、
移動体に搭載されたレーダにより、所定の観測領域内に存在する観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を得、観測対象物体の検出を行うものにおいて、上記距離と両角度を用いて、各画素の所定の基準からの高度値を算出し高度画像を生成する高度画像作成処理手段と、高度値を積分する範囲を決定する積分範囲設定手段と、上記積分範囲内の高度値を積分して高度積分図を作成する高度積分図作成手段と、上記高度積分図を基に観測対象物体の検出を行う物体検出処理手段と、観測対象物体が存在する画素または実空間上の位置を出力する表示手段を備える。
【発明の効果】
【0010】
この発明に係るレーダ画像処理装置によれば、移動体に搭載されたレーダにより得られた、観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向角度とエレベーション方向角度を用いて、高度画像作成処理手段が各画素の所定の基準からの高度値を算出して高度画像を生成し、積分範囲設定手段で決定された範囲の高度値を高度積分図作成手段で積分して高度積分図を作成し、この高度積分図を基に物体検出処理手段で観測対象物体の検出を行うので、低SNRでの誤測距による急激な高度値の変動に起因する誤検出の影響を低減できる効果がある。
また、高度積分図作成手段が高度値を積分する範囲を積分範囲設定手段で決定するので、大きさの異なる複数目標を検出できる効果もある。
【図面の簡単な説明】
【0011】
【図1】移動体搭載のレーザレーダで下方領域を観測する観測系の説明図である。
【図2】DSMと、DEM差からの高度情報を得、各画素の高度差を用い、樹冠領域抽出を行う手法の説明図である。
【図3】この発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
【図4】図1の観測系で、センサが下方に向かって飛行しながら観測作成した高度画像図である。
【図5】高度積分図作成手段で作成された高度積分図である。
【図6】図5の高度積分図の説明図である。
【図7】上段は高度積分図、下段は観測対象物体の存在領域を示す高度差分図である。
【図8】アジマス方向とエレベーション方向の物体検出列を組合せた物体存在領域特定説明図である。
【図9】観測対象物体に応じた設定積分範囲を単位としてアジマス方向にずらす物体領域検出手法の説明図である。
【図10】観測対象物体対応の設定積分範囲をアジマス方向とエレベーション方向の2次元し、設定積分範囲を単位としてずらす物体領域検出手法の説明図である。
【発明を実施するための形態】
【0012】
実施の形態1.
図3はこの発明の実施の形態1によるレーダ画像処理装置の構成を示すブロック構成図である。
1は、観測領域内における観測対象物体とセンサとの距離データ及び観測対象物体とセンサとのアジマス方向及びエレベーション方向の角度データを得る取得データ入力手段、
2は、取得データ入力手段1で得られた距離データ及びアジマス方向及びエレベーション方向の角度データを用いて高度画像を作成する高度画像作成処理手段、
3は、高度画像作成処理手段2で作成された高度画像から高度積分図を作成する領域を切り出し設定する積分範囲設定手段、
4は、積分範囲設定手段3で設定された領域において高度値を積分する高度積分図作成手段、
5は、高度積分図作成手段4で作成された高度積分図において観測対象物体の検出処理を行う物体検出処理手段、
6は、物体検出処理手段5で検出された観測対象物体が存在する画像上の座標、及び、実空間における位置を表示する表示部である。
【0013】
次に動作について説明する。
取得データ入力部1では、観測領域の所定観測点におけるビーム走査方向であるアジマス方向角度、エレベーション方向角度の角度データと、その角度における距離データを取得する。以下では、ここで得られるデータを取得データと呼ぶ。
【0014】
高度画像作成処理部2では、取得データ入力部1で得られた角度データ及び距離データを用いて高度画像を作成する。図1の観測系において、ある観測対象物体の座標を(x、y、z)とすると、zすなわちセンサから観測対象物体までの高度Hは上述の式1で得ることができる。
【0015】
積分範囲設定手段3では、後段の高度積分図作成手段4において用いる領域を設定する。図4は、図1のような観測系でセンサが下方に向かって飛行しながら観測を行った結果から高度画像作成処理手段2が作成した高度画像を表す。各画素には各観測地点の高度情報が与えられており、画像上下方向(以降アジマス方向と呼ぶ)にm画素、画像左右方向(以降エレベーション方向と呼ぶ)にn画素あるとする。積分範囲設定手段3では、積分範囲をアジマス方向全ての画素とする。ただし、以降の説明では、積分範囲をアジマス方向として行うが、積分範囲はエレベーション方向にしても良い。従来の装置では、低SNR時においては、雑音信号により、正確な距離測定を行うことができない。しかし、この発明では高度値を積分することにより、低SNRでの誤測距による急激な高度値の変動に起因する誤検出の影響を低減できるメリットが挙げられる。
また、センサがアジマス方向にビームを走査しながら移動していく場合において、アジマス方向の高度値の積分を行うことにより、リアルタイムに観測対象物体の有無または観測対象物体の頂点を検出することができるメリットをもつ。
【0016】
高度積分図作成手段4では、エレベーション方向の画素ごとに積分範囲設定手段3において設定されたアジマス方向全ての画素値(高度値)の総和をとり、その値を、エレベーション方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成する。図5は、高度積分図作成手段4による高度積分図の作成例を示す。
【0017】
物体検出処理手段5について説明する。図6は高度積分図作成手段4により得られた図5の高度積分図についての説明図である。図5の高度値Hはセンサと観測対象物体との高度差を表しており、観測対象物体の高度が高ければ高いほど得られるHの値は小さくなる。そのため、図6では高度積分値が減少している部分が、観測対象物体が存在する領域を表し、その他は地上領域を表す図となっている。物体領域のみを抽出するために、最小二乗法などの手法により地上部の推定線を算出する。ただし、同様の機能があれば最小二乗法などの本手法に限るものではない。もしもSNRが低い状況の場合は、推定線を作成する前に移動平均やメディアン処理などによって、高度値Hの平滑化を行う。平滑化処理に関しては、同等の効果がある手法ならば左記に挙げた処理に限るものではない。ただし,SNRが高い状況の場合は、本処理は必要なく、計算量低減のために本処理を省略する。
【0018】
図7上段に高度積分図、下段に推定線と高度積分値との差分をとった高度差分図を示す。図7下段の凸領域は物体の存在する領域を示し、もっとも高度差分値が大きい値を持つ画素、または任意閾値以上の極大値を目標点として検出する。
【0019】
表示手段6では、物体検出処理手段5で得られた検出点を高度画像上に表示する。
【0020】
実施の形態2.
実施の形態1においては、アジマス方向またはエレベーション方向のどちらか1方向のみの結果を用いて目標が存在する列を抽出したが、図8のようにアジマス方向およびエレベーション方向それぞれにおいて、実施の形態1のようにエレベーション方向の画素ごとにアジマス方向全ての画素値(高度値)の総和をとり、その値を、エレベーション方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成し、またアジマス方向の画素ごとにエレベーション方向全ての画素値(高度値)の総和をとり、その値を、アジマス方向を横軸、高度積分値を縦軸とする空間へプロットし、高度積分図を作成する処理をして観測対象物体検出を行い、アジマス方向と、エレベーション方向の物体検出列を組合せることにより、観測対象物体の存在する領域を特定することも可能である。その組合せ方として、アジマス方向とエレベーション方向の2種の高度積分図がそれぞれ任意閾値よりも低い画素、またはそれぞれ高度積分値の最大極大値となる画素またはそれぞれ任意閾値以下の極大値を観測対象物体画素として検出する。
【0021】
実施の形態3.
図9に示すように、積分範囲設定手段3において積分範囲を抽出したい観測対象物体の大きさに設定し、アジマス方向またはエレベーション方向に設定した積分範囲を単位としてずらしていく手法が挙げられる。アジマス方向にずらした場合、ずらすことによって得られたm個の高度積分値の中で、最も値が小さいものを抽出する。n個の高度積分値を高度積分図作成手段4や物体検出処理手段5に渡し、実施の形態1同様に観測対象物体検出を行う。このような方法によって、所望とする大きさの観測対象物体の頂点を抽出することが可能となる。
この手法はエレベーション方向に積分範囲を設定しても同様の処理を行うことが可能である。また、大きさの異なる複数目標を検出できるメリットがある。
【0022】
また、観測対象物体の大きさが不明の場合、この積分範囲を可変にし、積分範囲を変えながら繰返し計算を行わせることも可能である。その場合、物体検出処理手段5において、高度差分値が最も大きくなる積分範囲のデータを採用し、その際の検出結果を表示手段6に渡すことが可能である。
【0023】
実施の形態4.
観測対象物体の大きさが空間的に既知の場合、積分範囲設定手段3において、図10のように積分範囲を2次元にすることが可能である。これにより、実施の形態3よりもよりユーザが所望する観測対象物体のみを抽出することが可能となる。実施の形態1〜3同様、各エレベーション方向において高度積分値を取得し、高度積分図作成手段4や物体検出処理手段5において観測対象物体の検出を行う。
【産業上の利用可能性】
【0024】
この発明によるレーダ画像処理装置は航空機から地上に向けてレーダビームを放射し地表面や樹木またはその他物体で反射し戻ったビームからデータを取得し、樹木やその他物体の観測対象物体を検出するシステム、例えば森林域計測や冠雪害検出システムなどへの適用が可能である。
【符号の説明】
【0025】
1;取得データ入力手段、2;高度画像作成処理手段、3;積分範囲設定手段、4;高度積分図作成手段、5;物体検出処理手段、6;表示部。
【特許請求の範囲】
【請求項1】
移動体に搭載されたレーダにより、所定の観測領域内に存在する観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向の角度とエレベーション方向の角度を得、観測対象物体の検出を行うレーダ画像処理装置において、上記距離と両角度を用いて、各画素の所定の基準からの高度値を算出し高度画像を生成する高度画像作成処理手段と、高度値を積分する範囲を決定する積分範囲設定手段と、上記積分範囲内の高度値を積分して高度積分図を作成する高度積分図作成手段と、上記高度積分図を基に観測対象物体の検出を行う物体検出処理手段と、観測対象物体が存在する画素または実空間上の位置を出力表示する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項2】
積分範囲設定手段は、積分範囲を高度画像中の各エレベーション方向画素におけるアジマス方向画素全て、または各アジマス方向画素におけるエレベーション方向画素全てに設定し、高度積分図作成手段は、上記積分範囲設定手段によって決定された範囲において積分された値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
積分範囲設定手段は、積分範囲を各エレベーション方向画素における任意のアジマス方向画素、または各アジマス方向画素における任意のエレベーション方向画素に設定し、高度積分図作成手段は、上記積分範囲設定手段によって決定された範囲において積分された値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項4】
積分範囲設定手段は、積分範囲を各エレベーション方向画素における任意の複数種類のアジマス方向画素または各アジマス方向における任意の複数種類のエレベーション方向画素に設定し、高度積分図作成手段は、各積分範囲における高度積分値の総和が最も小さい場合の積分範囲の高度積分値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項5】
積分範囲設定手段は、積分範囲を任意のエレベーション方向とアジマス方向の2次元の領域とする請求項4記載のレーダ画像処理装置。
【請求項6】
物体検出処理手段は、高度積分図作成手段が作成した高度積分図の極小値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項7】
物体検出処理手段は、高度積分図作成手段により作成された高度積分図から近似線を用いてトレンドを除去し、任意閾値以上の極大値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項8】
物体検出処理手段は、高度積分図作成手段により作成された高度積分図から所定基準の推定線と高度積分値との差分をとった高度差分図を作成する平滑化処理を行い、高度差分図における任意閾値以上の極大値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項9】
物体検出処理手段は、積分範囲設定手段と高度積分図作成手段で得られるアジマス方向とエレベーション方向の2種の高度積分図がそれぞれ任意閾値よりも低い画素、またはそれぞれ高度積分値の最大極大値となる画素またはそれぞれ任意閾値以下の極大値を観測対象物体として検出することを特徴とする請求項2または3または請求項4または5何れかに記載のレーダ画像処理装置。
【請求項1】
移動体に搭載されたレーダにより、所定の観測領域内に存在する観測対象物体までのレーダとの距離と、観測対象物体のレーダに対するアジマス方向の角度とエレベーション方向の角度を得、観測対象物体の検出を行うレーダ画像処理装置において、上記距離と両角度を用いて、各画素の所定の基準からの高度値を算出し高度画像を生成する高度画像作成処理手段と、高度値を積分する範囲を決定する積分範囲設定手段と、上記積分範囲内の高度値を積分して高度積分図を作成する高度積分図作成手段と、上記高度積分図を基に観測対象物体の検出を行う物体検出処理手段と、観測対象物体が存在する画素または実空間上の位置を出力表示する表示手段を備えることを特徴とするレーダ画像処理装置。
【請求項2】
積分範囲設定手段は、積分範囲を高度画像中の各エレベーション方向画素におけるアジマス方向画素全て、または各アジマス方向画素におけるエレベーション方向画素全てに設定し、高度積分図作成手段は、上記積分範囲設定手段によって決定された範囲において積分された値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項3】
積分範囲設定手段は、積分範囲を各エレベーション方向画素における任意のアジマス方向画素、または各アジマス方向画素における任意のエレベーション方向画素に設定し、高度積分図作成手段は、上記積分範囲設定手段によって決定された範囲において積分された値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項4】
積分範囲設定手段は、積分範囲を各エレベーション方向画素における任意の複数種類のアジマス方向画素または各アジマス方向における任意の複数種類のエレベーション方向画素に設定し、高度積分図作成手段は、各積分範囲における高度積分値の総和が最も小さい場合の積分範囲の高度積分値をエレベーション方向またはアジマス方向の画素数分得ることを特徴とする請求項1記載のレーダ画像処理装置。
【請求項5】
積分範囲設定手段は、積分範囲を任意のエレベーション方向とアジマス方向の2次元の領域とする請求項4記載のレーダ画像処理装置。
【請求項6】
物体検出処理手段は、高度積分図作成手段が作成した高度積分図の極小値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項7】
物体検出処理手段は、高度積分図作成手段により作成された高度積分図から近似線を用いてトレンドを除去し、任意閾値以上の極大値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項8】
物体検出処理手段は、高度積分図作成手段により作成された高度積分図から所定基準の推定線と高度積分値との差分をとった高度差分図を作成する平滑化処理を行い、高度差分図における任意閾値以上の極大値を観測対象物体の頂点として検出することを特徴とする請求項2または3記載のレーダ画像処理装置。
【請求項9】
物体検出処理手段は、積分範囲設定手段と高度積分図作成手段で得られるアジマス方向とエレベーション方向の2種の高度積分図がそれぞれ任意閾値よりも低い画素、またはそれぞれ高度積分値の最大極大値となる画素またはそれぞれ任意閾値以下の極大値を観測対象物体として検出することを特徴とする請求項2または3または請求項4または5何れかに記載のレーダ画像処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−53138(P2011−53138A)
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願番号】特願2009−203594(P2009−203594)
【出願日】平成21年9月3日(2009.9.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年3月17日(2011.3.17)
【国際特許分類】
【出願日】平成21年9月3日(2009.9.3)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]