
レーダ画像処理装置
【課題】理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来るレーダ画像処理装置を得る。
【解決手段】レーダ画像処理装置は、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを算出し、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する動揺補償量算出部1と、動揺補償量算出部1により算出された動揺補償量φを用いて受信信号に対して位相補償を行う動揺補償処理部2とを備える。
【解決手段】レーダ画像処理装置は、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを算出し、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する動揺補償量算出部1と、動揺補償量算出部1により算出された動揺補償量φを用いて受信信号に対して位相補償を行う動揺補償処理部2とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーダ画像処理装置に係り、特に移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動(電波)を受信信号として、その受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置に関する。
【背景技術】
【0002】
合成開口レーダ(SAR:Synthetic Aperture Radar)は、航空機や衛星などの移動体(プラットフォーム)に搭載されて地表面を観測するレーダである。レーダ装置の移動中に受信した信号に対して信号処理を施すことにより観測対象となる地表面の画像を生成することができる。
【0003】
レーダ装置の受信信号を入力として地表面の画像を作成する信号処理方法には様々あり、例えば、レンジドップラー(Range Dopplar)アルゴリズム、チャープスケーリング(Chirp Scaling)アルゴリズム、ω-kアルゴリズム等がある。
【0004】
上記の信号処理方法では、レーダ装置を搭載するプラットフォームが等速直線運動を行いその軌道が直線状になることを前提としている。すなわち、観測点とレーダ装置との間のスラントレンジ変化R[η]が、次の式(1)のような双曲線状になることを前提としている。
【0005】
【数1】

【0006】
ここで、R0は観測点からレーダ装置までの最近接距離、ηはアジマス時刻、η0は最近接距離となるときのアジマス時刻、Vrはプラットフォームの速度を表す。また、アジマス周波数領域(ドップラ周波数領域)におけるアジマス圧縮時の参照関数Hazとしては、次の式(2)が使用される。
【0007】
【数2】
【0008】
ここで、f0は送信波の中心周波数、fnはアジマス周波数を表す。
【0009】
ところで、特に航空機搭載SARの場合、一定でない外気の気流によりプラットフォームが流されることでその軌道が期待する直線軌道から逸脱し、上記の信号処理方法の前提となる双曲線状のスラントレンジ変化が得られない場合がある。このような状況下で受信した信号から上述の信号処理方法で画像を生成すると、プラットフォームの移動方向と平行な方向、若しくは移動方向と垂直な方向の分解能が劣化した画像が生成されてしまう。そのため、一般的な合成開口レーダ(SAR)では、プラットフォームの理想軌道からのずれにより発生する分解能劣化を補償する動揺補償処理が行われる。
【0010】
特許文献1に記載の動揺補償処理では、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出し、それらに基づいて実際の軌道におけるスラントレンジ変化と理想的な軌道におけるスラントレンジ変化との差分を位相換算した動揺補償量を求め、この動揺補償量を用いて受信信号を位相補償することにより、理想軌道からのずれにより発生する分解能劣化を補償している。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−256058号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1のようにプラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出してそれらに基づいて動揺補償量を算出する方法では、不規則な大気流の変動や重力に伴う自然落下によりプラットフォームが複雑な3次元軌道をとる場合には理想軌道の選定が困難になる。その結果、適切な動揺補償処理が行えず、画像の分解能劣化を補償できないという問題があった。
【0013】
この発明は、このような問題を解決するためになされたものであり、理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来るレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0014】
この発明に係るレーダ画像処理装置は、移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動を受信信号として、その受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置において、移動体の実際のスラントレンジ変化とそれを近似する理想的なスラントレンジ変化とを算出し、実際のスラントレンジ変化と理想的なスラントレンジ変化との差分に基づいて動揺補償量を算出する動揺補償量算出部と、動揺補償量算出部により算出された動揺補償量を用いて受信信号に対して位相補償を行う動揺補償処理部とを備えることを特徴とする。
【発明の効果】
【0015】
この発明に係るレーダ画像処理装置によれば、理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来る。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の概要を示す図である。
【図3】この発明の実施の形態1に係るレーダ画像処理装置のスラントレンジ変化の概要を示す図である。
【発明を実施するための形態】
【0017】
以下、この発明のレーダ画像処理装置の好適な実施の形態について、添付の図面を用いて説明する。
【0018】
実施の形態1.
この発明の実施の形態1に係るレーダ画像処理装置について図1から図3までを参照して説明する。図1はこの発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【0019】
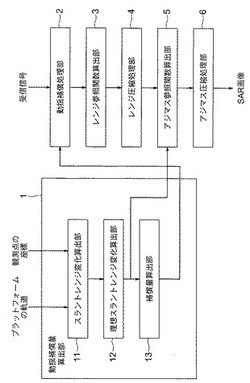
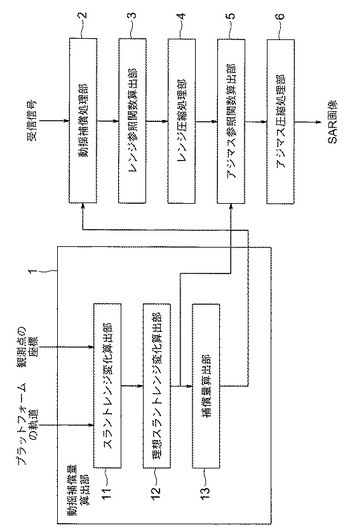
図1に示されるように、レーダ画像処理装置は、動揺補償量算出部1と、動揺補償処理部2と、レンジ参照関数算出部3と、レンジ圧縮処理部4と、アジマス参照関数算出部5と、アジマス圧縮処理部6とを備えている。
【0020】
動揺補償量算出部1は、プラットフォームの実際のスラントレンジ変化とそれを近似する理想的なスラントレンジ変化とを算出し、それらの差分に基づいて動揺補償量を算出する。詳細には、動揺補償量算出部1は、プラットフォームの軌道及び観測領域内の観測点の座標に基づいて実際のスラントレンジ変化Ractを算出するスラントレンジ変化算出部11と、実際のスラントレンジ変化Ractを2次多項式で近似することにより理想的なスラントレンジ変化Ridealを算出する理想スラントレンジ変化算出部12と、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する補償量算出部13とから構成されている。
【0021】
動揺補償処理部2は、動揺補償量算出部1により算出された動揺補償量φを用いて、受信信号に対して位相補償を行う。
レンジ参照関数算出部3とレンジ圧縮処理部4は、動揺補償処理部2により処理された受信信号に対して、レンジ参照関数によるレンジ方向の圧縮処理を行う。
アジマス参照関数算出部5は、動揺補償量算出部1により算出された理想的なスラントレンジ変化Ridealから得られる理想的なプラットフォーム速度Videalを用いて、アジマス参照関数Hazを算出する。
アジマス圧縮処理部6は、アジマス参照関数算出部5により算出されたアジマス参照関数Hazを用いて、レンジ圧縮処理部4によりレンジ方向に圧縮処理された受信信号に対してアジマス方向の圧縮処理を行う。
【0022】
次に、この発明の実施の形態1に係るレーダ画像処理装置の動作について説明する。
【0023】
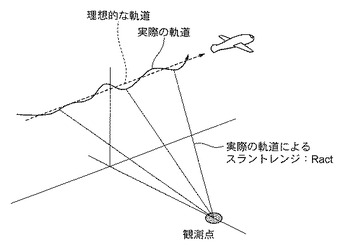
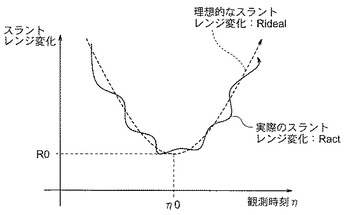
図2は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の概要を示す図である。また、図3は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測によるスラントレンジ変化を示す図である。
【0024】
レーダ画像処理装置は、プラットフォームに搭載されたレーダ装置から照射されて観測領域で散乱された波動(電波)を受信信号として、その受信信号に対してプラットフォームの移動方向と平行な方向(アジマス方向)の分解能を向上させる信号処理を行うことにより観測領域の画像を生成する。なお、一般的な合成開口レーダ(SAR)では、アジマス方向だけでなく、プラットフォームの移動方向と直角な方向(レンジ方向)の分解能を向上させる信号処理も行われるが、この発明の主眼は動揺補償処理とアジマス参照関数算出の改善にあるため、レンジ方向の高分解能処理であるレンジ参照関数算出処理、及びレンジ圧縮処理については詳細には説明しない。これらについては、一般的に知られているパルス圧縮手法を用いればよい。
【0025】
まず、動揺補償量算出部1における動揺補償量算出の手順を以下に説明する。
【0026】
スラントレンジ変化算出部11において、観測時刻ηにおけるプラットフォームの位置と地上の観測点までのスラントレンジ変化Ract[η]をベクトル演算により算出する。なお、プラットフォームの位置と地上の観測点の座標は、例えば地球固定座標系での3次元ベクトルのような、距離算出が容易な座標系で保持されていることが望ましく、座標系が異なるのであれば必要に応じて座標変換すればよい。
【0027】
次に、理想スラントレンジ変化算出部12において、スラントレンジ変化算出部11で算出された実際のスラントレンジ変化Ract[η]を次の式(3)で近似する際の係数[C2,C1,C0]を最小二乗法により決定する。
【0028】
【数3】
【0029】
式(3)に従って得られるプラットフォームのスラントレンジ変化が、次の式(4)に従うプラットフォームが直線軌道をとる場合に得られる理想的なスラントレンジ変化Rideal[η]と一致するとして、係数[C2,C1,C0]から、理想的なプラットフォームの速度Videal、最近接時刻η0、及び最近接時のスラントレンジR0を算出する。
【0030】
【数4】
【0031】
理想スラントレンジ変化算出部12で算出された理想的な速度Videalはアジマス参照関数算出部5に入力され、式(2)に従いアジマス参照関数Hazを算出する際のプラットフォームの速度Vrとして用いられる。
【0032】
次に、補償量算出部13において、動揺補償処理部2における位相補償を行うための動揺補償量φを算出する。動揺補償量φは理想的なスラントレンジ変化Ridealからの差分距離を位相に変換したものであり、アジマス時刻ηにおける動揺補償量φ[η]は、次の式(5)によって与えられる。
【0033】
【数5】
【0034】
ここで、πは円周率、f0は送信電波の周波数、Cは光速度を表す。
【0035】
続いて、動揺補償処理部2において、補償量算出部13で式(5)に従い算出された動揺補償量φ[η]を用いて、観測時刻ηで受信した信号に対して位相補償を行う。
【0036】
レンジ参照関数算出部3とレンジ圧縮処理部4では、位相補償を行った画像データに対してレンジ方向の圧縮処理を行うが、前述の通り一般的なパルス圧縮手法を用いればよいため、詳細な説明は省略する。
【0037】
アジマス参照関数算出部5では、理想スラントレンジ変化算出部12で算出された理想的な速度Videalを用いて、式(2)に従いアジマス参照関数Hazを算出する。なお、アジマス参照関数Hazの算出については、プラットフォーム速度Videalから算出するのではなく、スラントレンジ変化Ridealを直接フーリエ変換して算出することも可能であり、どちらの手法を用いてもよい。
【0038】
最後に、アジマス圧縮処理部6において、アジマス参照関数算出部5で算出されたアジマス参照関数Hazを用いて、アジマス方向に圧縮した画像を生成する。ここでのアジマス圧縮処理は、アジマス方向フーリエ変換、アジマス参照関数乗算、アジマス方向逆フーリエ変換の手順で行うが、一般的な手法であるため、詳細な説明は省略する。
【0039】
以上説明したように、この発明の実施の形態1に係るレーダ画像処理装置では、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出することなく、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを直接に算出し、それらに基づいて動揺補償量φを算出する。これにより、プラットフォームが3次元的な複雑な軌道をとる場合においても、精度の良い動揺補償量を容易に算出することが可能となり、分解能劣化の伴わない画像を生成することができる。また、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出してそれらに基づいて動揺補償量を算出する方法に比べて、サイドローブ特性の劣化を抑えることができる。
【0040】
なお、以上の説明では、レーダ装置は電波を送受信するものとしたが、レーダ装置が送受信する波動の種類は特に問わない。例えば、音波やレーダ光を用いてもよい。
【符号の説明】
【0041】
1 動揺補償量算出部、2 動揺補償処理部、11 スラントレンジ変化算出部、12 理想スラントレンジ変化算出部、13 補償量算出部、Ract 実際のスラントレンジ変化、Rideal 理想的なスラントレンジ変化、φ 動揺補償量。
【技術分野】
【0001】
この発明は、レーダ画像処理装置に係り、特に移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動(電波)を受信信号として、その受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置に関する。
【背景技術】
【0002】
合成開口レーダ(SAR:Synthetic Aperture Radar)は、航空機や衛星などの移動体(プラットフォーム)に搭載されて地表面を観測するレーダである。レーダ装置の移動中に受信した信号に対して信号処理を施すことにより観測対象となる地表面の画像を生成することができる。
【0003】
レーダ装置の受信信号を入力として地表面の画像を作成する信号処理方法には様々あり、例えば、レンジドップラー(Range Dopplar)アルゴリズム、チャープスケーリング(Chirp Scaling)アルゴリズム、ω-kアルゴリズム等がある。
【0004】
上記の信号処理方法では、レーダ装置を搭載するプラットフォームが等速直線運動を行いその軌道が直線状になることを前提としている。すなわち、観測点とレーダ装置との間のスラントレンジ変化R[η]が、次の式(1)のような双曲線状になることを前提としている。
【0005】
【数1】
【0006】
ここで、R0は観測点からレーダ装置までの最近接距離、ηはアジマス時刻、η0は最近接距離となるときのアジマス時刻、Vrはプラットフォームの速度を表す。また、アジマス周波数領域(ドップラ周波数領域)におけるアジマス圧縮時の参照関数Hazとしては、次の式(2)が使用される。
【0007】
【数2】
【0008】
ここで、f0は送信波の中心周波数、fnはアジマス周波数を表す。
【0009】
ところで、特に航空機搭載SARの場合、一定でない外気の気流によりプラットフォームが流されることでその軌道が期待する直線軌道から逸脱し、上記の信号処理方法の前提となる双曲線状のスラントレンジ変化が得られない場合がある。このような状況下で受信した信号から上述の信号処理方法で画像を生成すると、プラットフォームの移動方向と平行な方向、若しくは移動方向と垂直な方向の分解能が劣化した画像が生成されてしまう。そのため、一般的な合成開口レーダ(SAR)では、プラットフォームの理想軌道からのずれにより発生する分解能劣化を補償する動揺補償処理が行われる。
【0010】
特許文献1に記載の動揺補償処理では、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出し、それらに基づいて実際の軌道におけるスラントレンジ変化と理想的な軌道におけるスラントレンジ変化との差分を位相換算した動揺補償量を求め、この動揺補償量を用いて受信信号を位相補償することにより、理想軌道からのずれにより発生する分解能劣化を補償している。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2007−256058号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、特許文献1のようにプラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出してそれらに基づいて動揺補償量を算出する方法では、不規則な大気流の変動や重力に伴う自然落下によりプラットフォームが複雑な3次元軌道をとる場合には理想軌道の選定が困難になる。その結果、適切な動揺補償処理が行えず、画像の分解能劣化を補償できないという問題があった。
【0013】
この発明は、このような問題を解決するためになされたものであり、理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来るレーダ画像処理装置を得ることを目的とする。
【課題を解決するための手段】
【0014】
この発明に係るレーダ画像処理装置は、移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動を受信信号として、その受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置において、移動体の実際のスラントレンジ変化とそれを近似する理想的なスラントレンジ変化とを算出し、実際のスラントレンジ変化と理想的なスラントレンジ変化との差分に基づいて動揺補償量を算出する動揺補償量算出部と、動揺補償量算出部により算出された動揺補償量を用いて受信信号に対して位相補償を行う動揺補償処理部とを備えることを特徴とする。
【発明の効果】
【0015】
この発明に係るレーダ画像処理装置によれば、理想的な直線軌道から逸脱した複雑な軌道条件下で撮像されたSARデータに対しても、適切な動揺補償処理を行うことにより、分解能劣化の伴わない画像を生成することが出来る。
【図面の簡単な説明】
【0016】
【図1】この発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の概要を示す図である。
【図3】この発明の実施の形態1に係るレーダ画像処理装置のスラントレンジ変化の概要を示す図である。
【発明を実施するための形態】
【0017】
以下、この発明のレーダ画像処理装置の好適な実施の形態について、添付の図面を用いて説明する。
【0018】
実施の形態1.
この発明の実施の形態1に係るレーダ画像処理装置について図1から図3までを参照して説明する。図1はこの発明の実施の形態1に係るレーダ画像処理装置の構成を示すブロック図である。
【0019】
図1に示されるように、レーダ画像処理装置は、動揺補償量算出部1と、動揺補償処理部2と、レンジ参照関数算出部3と、レンジ圧縮処理部4と、アジマス参照関数算出部5と、アジマス圧縮処理部6とを備えている。
【0020】
動揺補償量算出部1は、プラットフォームの実際のスラントレンジ変化とそれを近似する理想的なスラントレンジ変化とを算出し、それらの差分に基づいて動揺補償量を算出する。詳細には、動揺補償量算出部1は、プラットフォームの軌道及び観測領域内の観測点の座標に基づいて実際のスラントレンジ変化Ractを算出するスラントレンジ変化算出部11と、実際のスラントレンジ変化Ractを2次多項式で近似することにより理想的なスラントレンジ変化Ridealを算出する理想スラントレンジ変化算出部12と、実際のスラントレンジ変化Ractと理想的なスラントレンジ変化Ridealとの差分に基づいて動揺補償量φを算出する補償量算出部13とから構成されている。
【0021】
動揺補償処理部2は、動揺補償量算出部1により算出された動揺補償量φを用いて、受信信号に対して位相補償を行う。
レンジ参照関数算出部3とレンジ圧縮処理部4は、動揺補償処理部2により処理された受信信号に対して、レンジ参照関数によるレンジ方向の圧縮処理を行う。
アジマス参照関数算出部5は、動揺補償量算出部1により算出された理想的なスラントレンジ変化Ridealから得られる理想的なプラットフォーム速度Videalを用いて、アジマス参照関数Hazを算出する。
アジマス圧縮処理部6は、アジマス参照関数算出部5により算出されたアジマス参照関数Hazを用いて、レンジ圧縮処理部4によりレンジ方向に圧縮処理された受信信号に対してアジマス方向の圧縮処理を行う。
【0022】
次に、この発明の実施の形態1に係るレーダ画像処理装置の動作について説明する。
【0023】
図2は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測の概要を示す図である。また、図3は、この発明の実施の形態1に係るレーダ画像処理装置のレーダ観測によるスラントレンジ変化を示す図である。
【0024】
レーダ画像処理装置は、プラットフォームに搭載されたレーダ装置から照射されて観測領域で散乱された波動(電波)を受信信号として、その受信信号に対してプラットフォームの移動方向と平行な方向(アジマス方向)の分解能を向上させる信号処理を行うことにより観測領域の画像を生成する。なお、一般的な合成開口レーダ(SAR)では、アジマス方向だけでなく、プラットフォームの移動方向と直角な方向(レンジ方向)の分解能を向上させる信号処理も行われるが、この発明の主眼は動揺補償処理とアジマス参照関数算出の改善にあるため、レンジ方向の高分解能処理であるレンジ参照関数算出処理、及びレンジ圧縮処理については詳細には説明しない。これらについては、一般的に知られているパルス圧縮手法を用いればよい。
【0025】
まず、動揺補償量算出部1における動揺補償量算出の手順を以下に説明する。
【0026】
スラントレンジ変化算出部11において、観測時刻ηにおけるプラットフォームの位置と地上の観測点までのスラントレンジ変化Ract[η]をベクトル演算により算出する。なお、プラットフォームの位置と地上の観測点の座標は、例えば地球固定座標系での3次元ベクトルのような、距離算出が容易な座標系で保持されていることが望ましく、座標系が異なるのであれば必要に応じて座標変換すればよい。
【0027】
次に、理想スラントレンジ変化算出部12において、スラントレンジ変化算出部11で算出された実際のスラントレンジ変化Ract[η]を次の式(3)で近似する際の係数[C2,C1,C0]を最小二乗法により決定する。
【0028】
【数3】
【0029】
式(3)に従って得られるプラットフォームのスラントレンジ変化が、次の式(4)に従うプラットフォームが直線軌道をとる場合に得られる理想的なスラントレンジ変化Rideal[η]と一致するとして、係数[C2,C1,C0]から、理想的なプラットフォームの速度Videal、最近接時刻η0、及び最近接時のスラントレンジR0を算出する。
【0030】
【数4】
【0031】
理想スラントレンジ変化算出部12で算出された理想的な速度Videalはアジマス参照関数算出部5に入力され、式(2)に従いアジマス参照関数Hazを算出する際のプラットフォームの速度Vrとして用いられる。
【0032】
次に、補償量算出部13において、動揺補償処理部2における位相補償を行うための動揺補償量φを算出する。動揺補償量φは理想的なスラントレンジ変化Ridealからの差分距離を位相に変換したものであり、アジマス時刻ηにおける動揺補償量φ[η]は、次の式(5)によって与えられる。
【0033】
【数5】
【0034】
ここで、πは円周率、f0は送信電波の周波数、Cは光速度を表す。
【0035】
続いて、動揺補償処理部2において、補償量算出部13で式(5)に従い算出された動揺補償量φ[η]を用いて、観測時刻ηで受信した信号に対して位相補償を行う。
【0036】
レンジ参照関数算出部3とレンジ圧縮処理部4では、位相補償を行った画像データに対してレンジ方向の圧縮処理を行うが、前述の通り一般的なパルス圧縮手法を用いればよいため、詳細な説明は省略する。
【0037】
アジマス参照関数算出部5では、理想スラントレンジ変化算出部12で算出された理想的な速度Videalを用いて、式(2)に従いアジマス参照関数Hazを算出する。なお、アジマス参照関数Hazの算出については、プラットフォーム速度Videalから算出するのではなく、スラントレンジ変化Ridealを直接フーリエ変換して算出することも可能であり、どちらの手法を用いてもよい。
【0038】
最後に、アジマス圧縮処理部6において、アジマス参照関数算出部5で算出されたアジマス参照関数Hazを用いて、アジマス方向に圧縮した画像を生成する。ここでのアジマス圧縮処理は、アジマス方向フーリエ変換、アジマス参照関数乗算、アジマス方向逆フーリエ変換の手順で行うが、一般的な手法であるため、詳細な説明は省略する。
【0039】
以上説明したように、この発明の実施の形態1に係るレーダ画像処理装置では、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出することなく、プラットフォームの実際のスラントレンジ変化Ractとそれを近似する理想的なスラントレンジ変化Ridealとを直接に算出し、それらに基づいて動揺補償量φを算出する。これにより、プラットフォームが3次元的な複雑な軌道をとる場合においても、精度の良い動揺補償量を容易に算出することが可能となり、分解能劣化の伴わない画像を生成することができる。また、プラットフォームの実際の軌道とそれを近似する直線状の理想軌道とを算出してそれらに基づいて動揺補償量を算出する方法に比べて、サイドローブ特性の劣化を抑えることができる。
【0040】
なお、以上の説明では、レーダ装置は電波を送受信するものとしたが、レーダ装置が送受信する波動の種類は特に問わない。例えば、音波やレーダ光を用いてもよい。
【符号の説明】
【0041】
1 動揺補償量算出部、2 動揺補償処理部、11 スラントレンジ変化算出部、12 理想スラントレンジ変化算出部、13 補償量算出部、Ract 実際のスラントレンジ変化、Rideal 理想的なスラントレンジ変化、φ 動揺補償量。
【特許請求の範囲】
【請求項1】
移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動を受信信号として、該受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置において、
前記移動体の実際のスラントレンジ変化と該実際のスラントレンジ変化を近似する理想的なスラントレンジ変化とを算出し、前記実際のスラントレンジ変化と前記理想的なスラントレンジ変化との差分に基づいて動揺補償量を算出する動揺補償量算出部と、
該動揺補償量算出部により算出された前記動揺補償量を用いて前記受信信号に対して位相補償を行う動揺補償処理部と
を備えることを特徴とする、レーダ画像処理装置。
【請求項2】
前記動揺補償量算出部により算出された前記理想的なストラントレンジ変化又は該理想的なストラントレンジ変化から得られる理想的な移動体速度を用いてアジマス参照関数を算出するアジマス参照関数算出部と、
該アジマス参照関数算出部により算出された前記アジマス参照関数を用いて前記受信信号に対してアジマス方向の圧縮処理を行うアジマス圧縮処理部と
をさらに備えることを特徴とする、請求項1に記載のレーダ画像処理装置。
【請求項3】
前記動揺補償量算出部は、
前記移動体の軌道及び観測領域内の観測点の座標に基づいて前記実際のスラントレンジ変化を算出するスラントレンジ変化算出部と、
前記実際のスラントレンジ変化を多項式近似することにより理想的なスラントレンジ変化を算出する理想スラントレンジ変化算出部と、
前記実際のスラントレンジ変化と前記理想的なスラントレンジ変化との差分に基づいて前記動揺補償量を算出する補償量算出部と
を備えることを特徴とする、請求項1又は2に記載のレーダ画像処理装置。
【請求項1】
移動体に搭載されたレーダ装置から照射されて観測領域で散乱された波動を受信信号として、該受信信号に基づいて観測領域の画像を生成するレーダ画像処理装置において、
前記移動体の実際のスラントレンジ変化と該実際のスラントレンジ変化を近似する理想的なスラントレンジ変化とを算出し、前記実際のスラントレンジ変化と前記理想的なスラントレンジ変化との差分に基づいて動揺補償量を算出する動揺補償量算出部と、
該動揺補償量算出部により算出された前記動揺補償量を用いて前記受信信号に対して位相補償を行う動揺補償処理部と
を備えることを特徴とする、レーダ画像処理装置。
【請求項2】
前記動揺補償量算出部により算出された前記理想的なストラントレンジ変化又は該理想的なストラントレンジ変化から得られる理想的な移動体速度を用いてアジマス参照関数を算出するアジマス参照関数算出部と、
該アジマス参照関数算出部により算出された前記アジマス参照関数を用いて前記受信信号に対してアジマス方向の圧縮処理を行うアジマス圧縮処理部と
をさらに備えることを特徴とする、請求項1に記載のレーダ画像処理装置。
【請求項3】
前記動揺補償量算出部は、
前記移動体の軌道及び観測領域内の観測点の座標に基づいて前記実際のスラントレンジ変化を算出するスラントレンジ変化算出部と、
前記実際のスラントレンジ変化を多項式近似することにより理想的なスラントレンジ変化を算出する理想スラントレンジ変化算出部と、
前記実際のスラントレンジ変化と前記理想的なスラントレンジ変化との差分に基づいて前記動揺補償量を算出する補償量算出部と
を備えることを特徴とする、請求項1又は2に記載のレーダ画像処理装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−127751(P2012−127751A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−278278(P2010−278278)
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月14日(2010.12.14)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]