
レーダ装置、レーダの制御方法、およびプログラム
【課題】操作員が指定した特定方位の目標探知性能や方位分解性能を向上させ、かつ1つの空中線部が機能喪失しても残りの空中線部で方位全周を監視できるレーダ装置を提供する。
【解決手段】フェーズドアレイアンテナを有する空中線部の方位を機械的に変更させるための空中線駆動部を設ける。さらに、各空中線駆動部を制御するための制御データを生成する空中線駆動制御部を設ける。これによって、操作員が表示・操作部から特定方位を指定すると、空中線駆動制御部が、その特定方位にビーム形成するアンテナ開口およびアンテナ素子数を増大させるように空中線部の設定方位を計算し、空中線駆動部を制御して所望の空中線部を回転させる。また、操作員が表示・操作部から機能を喪失した空中線部を指定すると、空中線駆動制御部が空中線駆動部を制御し、機能を喪失した空中線部を除く全ての空中線部によって方位全周の監視を継続的に維持させる。
【解決手段】フェーズドアレイアンテナを有する空中線部の方位を機械的に変更させるための空中線駆動部を設ける。さらに、各空中線駆動部を制御するための制御データを生成する空中線駆動制御部を設ける。これによって、操作員が表示・操作部から特定方位を指定すると、空中線駆動制御部が、その特定方位にビーム形成するアンテナ開口およびアンテナ素子数を増大させるように空中線部の設定方位を計算し、空中線駆動部を制御して所望の空中線部を回転させる。また、操作員が表示・操作部から機能を喪失した空中線部を指定すると、空中線駆動制御部が空中線駆動部を制御し、機能を喪失した空中線部を除く全ての空中線部によって方位全周の監視を継続的に維持させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置等に関し、特に,可動フェーズドアレイアンテナによって監視制御を行うレーダ装置、レーダの制御方法、および、その方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
レーダ装置は、遠距離の小目標を高い分解能で追尾できる性能を有することが望ましい。このような性能を満足させるために、アレイアンテナを複数組み合わせて、それぞれのアレイアンテナの位置情報と放射ビーム指向方向のデータから最適な放射開口面を選定することにより、単独のアレイアンテナより大きな開口面のアンテナを等価的に形成したレーダ装置の技術が知られている(例えば、特許文献1参照)。この技術によれば、アレイアンテナの開口面を等価的に大きくすることができるので、より遠距離の小目標を高方位分解能で追尾することができる。
【0003】
また、空中線アンテナの開口面からビームが送信される指向角度が大きくなった場合であってもビーム形成時の利得の低下を抑え、目標対象の検出率の低下を防ぐことができるレーダ装置の技術も知られている(例えば、特許文献2参照)。この技術によれば、目標対象物へ指向させるビームの利得を算出し、算出された利得が要求される利得を満たさない場合は、機械的に空中線アンテナを駆動してその空中線アンテナの開口面を目標対象の方向へ機械的に指向させている。その結果、空中線アンテナの開口面からビームが送信される指向角度が大きくなった場合でも、ビーム形成時の利得の低下を抑え、目標対象の検出率の低下を防ぐことができる。
【0004】
また、方位方向にビーム走査を行う複数のアンテナを有するレーダ装置であって、隣接するアンテナのビーム走査範囲を一部重複させることにより、その重複する領域への一定時間内にビームを照射する回数を増加させて追尾精度を向上させると共に、複数のアンテナを備えた空中線装置全体を機械的に回転させることにより、隣接するアンテナのビーム走査範囲が重複する領域を任意の方位に設定することができるレーダ装置の技術も知られている(例えば、特許文献3参照)。この技術によれば、表示器にて指定した対象目標の方位が、隣り合う2つのアンテナのスキャンビームがオーバーラップする領域内に位置するように空中線装置を回動制御させているので、指定した対象目標は隣り合う2つのアンテナのビームにより夫々受信されることになる。そのため、スキャン毎に得られる目標からの受信データ数は2倍に増えるので、優先的に追尾すべき方位あるいは目標の追尾データレートの向上を図ることができ、追尾精度を向上させることができる。また、オーバーラップ領域で目標を追尾している状態から、当該目標がオーバーラップ領域外に移動することが予測される場合でも、目標の追尾予測位置の方位情報により、オーバーラップ領域内にて対象目標が継続して追尾できるように、空中線装置を機械的に回転させることで、データレート高速化状態の継続化を図ることができ、高精度の追尾を維持することが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−292614号公報
【特許文献2】特開2000−258531号公報
【特許文献3】特開2006−153517号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
すなわち、前記特許文献1の技術は、アレイアンテナを複数組み合わせることでアンテナ開口面を大きくして、重点的な方位に絞って目標探知性能や方位分解性能を向上させることができる。しかしながら、曲面上にアンテナ素子を配列した構成となっているので、ビーム照射方向以外への電力放射によるロスが大きくなる。そのため、アンテナ開口面の大きさやアレイアンテナ全体から放射される単位電力量当りの目標探知性能は低下する。また、特許文献2の技術は、機械的に空中線アンテナを駆動させることにより重点的な方位に的を絞って目標探知性能や方位分解性能を向上させることはできるが、駆動機構が故障した場合には重点的な方位への追尾を行うことができない。また、前記特許文献3の技術はアンテナ開口を増大させる手段を有していないため、特定方位の目標探知性能と方位分解性能を向上させることができない。さらに、この公報の技術では、複数のアンテナのうち1つのアンテナが機能を喪失した場合は、そのアンテナが分担していたビーム走査範囲の監視機能が喪失してしまう。
【0007】
また、特許文献3のレーダ装置においては、フェーズドアレイアンテナの各素子の送信電力が均一で固定の場合は、目標物の探知性能がビーム形成に寄与するアンテナの素子数に依存し、方位分解性能がフェーズドアレイアンテナのアンテナ開口面の水平方向の大きさに依存するが、アンテナ形状が固定であるために素子数やアンテナ開口面の大きさを増大させることができない。そのため、重点的に監視が必要な方位が生じた場合に、その方位の目標探知性能や方位分解性能を向上させることができない。また、それぞれのフェーズドアレイアンテナが予め決められた方位範囲しか監視できないため、アンテナ開口の設定方位がそれぞれ異なる複数のフェーズドアレイアンテナを有するレーダ装置においては、1つのフェーズドアレイアンテナが機能を喪失した場合は特定方位範囲に対する監視機能が失われてしまう。
【0008】
すなわち、前記特許文献2,3のいずれの技術を単独又は組み合わせて用いても、複数のアンテナのうち少なくとも1つのアンテナが機能を喪失した場合は、機能喪失したアンテナが分担していたビーム走査範囲の監視機能を他の健全なアンテナで補完することができない。さらに、複数のアンテナのうち少なくとも1つのアンテナが機能を喪失しても、重点的な方位に的を絞って目標探知性能や方位分解性能を向上させることはできるが、方位全周を網羅して監視することはできない。また、前記特許文献1の技術を適用したとしても、目標探知性能を効率的に向上させることができないという課題は依然として解決されない。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、必要に応じて特定の方位範囲に対する目標の探知性能や方位分解性能を高めると共に、複数のフェーズドアレイアンテナのうちの少なくとも1つが機能を喪失しても、そのフェーズドアレイアンテナが分担していた方位範囲の監視機能を維持することができ、かつ方位全周の常時走査も行うことができるレーダ装置、レーダの制御方法、および、その方法をコンピュータに実行させるプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係るレーダ装置は、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、特定方位に対して隣り合う2つのフェーズドアレイアンテナを駆動して特定方位へのビームを形成すると共に、残りのフェーズドアレイアンテナが補完して方位全周へのビームを形成するように構成されている。
【0011】
本発明に係るレーダ装置の好適な実施形態としては、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、任意の特定方位を入力する表示・操作部と、表示・操作部から入力された特定方位のレーダ性能を向上させるように、複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する空中線駆動制御部と、方位全周へビームが走査するように複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、空中線駆動制御部が計算したアンテナ開口の設定方位に基づいて、所望のフェーズドアレイアンテナの方位を機械的に回転させる空中線駆動部とを備える構成を採っている。
【0012】
また、本発明はレーダ装置によるレーダの制御方法を提供することもできる。すなわち、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置によるレーダの制御方法であって、任意の特定方位を入力する第1のステップと、第1のステップで入力された特定方位のレーダ性能を向上させるように、複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する第2のステップと、方位全周へビームが走査するように複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、第2のステップで計算されたアンテナ開口の設定方位に基づいて、所望のフェーズドアレイアンテナの方位を機械的に回転させる第3のステップとを含むレーダの制御方法を提供することもできる。
【0013】
また、本発明は、前記発明によるレーダの制御方法をコンピュータに実行させるプログラムを提供することもできる。
【発明の効果】
【0014】
本発明のレーダ装置によれば、各空中線部(各フェーズドアレイアンテナ)の方位を機械的に変更し、特定方位へのビームを形成するアンテナ素子数を増大させることにより、フェーズドアレイアンテナのアンテナ開口から放射される送信電力を増大させると共に、水平方向のアンテナ開口を等価的に増大させることができるので、ビームのピーク値を高くしてそのビームの半値幅を小さくすることができる。その結果、特定方位に対して目標探知性能と方位分解性能を向上させることができる。また、機能を喪失した空中線部が分担していた監視方位範囲に対しては、他の健全な空中線部が代替してビーム走査を行うように各空中線部の方位を機械的に変更できるため、1つの空中線部の機能が喪失しても、その空中線部に割り当てられていた方位範囲の監視機能を維持することができる。さらに、機能を喪失した空中線部が存在していても、全ての健全な空中線部によって方位全周を網羅して監視を維持することもできる。
【図面の簡単な説明】
【0015】
【図1】N個の空中線部を有する第1実施形態のレーダ装置の構成図である。
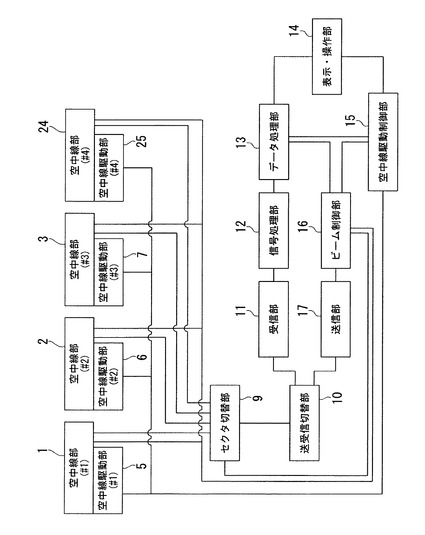
【図2】N個の空中線部を有し特定方位を自動的に変更する第2実施形態のレーダ装置の構成図である。
【図3】図2におけるデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。
【図4】4個の空中線部を有する実施例1のレーダ装置の構成図である。
【図5】図4に示すレーダ装置において、特定方位の指定が無い場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図6】図4に示すレーダ装置において、特定方位が指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図7】図4に示すレーダ装置において、機能喪失セクタが指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図8】4個の空中線部を有し特定方位を自動的に変更する実施例2のレーダ装置の構成図である。
【発明を実施するための形態】
【0016】
以下、図面を参照しながら、本発明に係るレーダ装置の幾つかの実施形態について詳細に説明する。なお、各実施形態を説明するための全図において、同一要素は原則として同一の符号を付し、その繰り返しの説明は省略する。
【0017】
《第1実施形態》
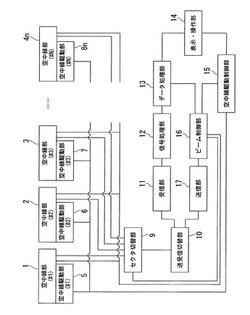
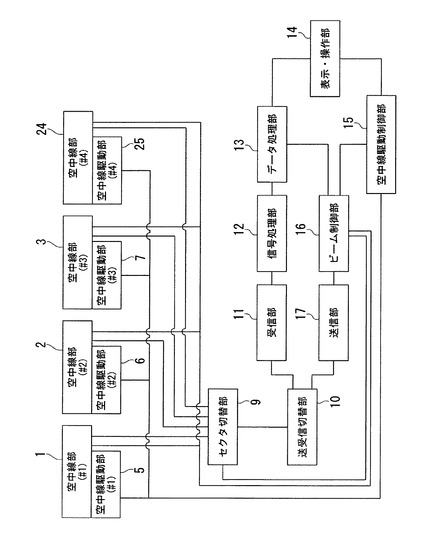
図1は、N個の空中線部を有する第1実施形態のレーダ装置の構成図である。図1に示すように、レーダ装置は、フェーズドアレイアンテナを有するn個の空中線部1〜4nと、空中線部1〜4nのそれぞれの方位を機械的に変更するためのn個の空中線駆動部5〜8nと、所定の空中線部のRF(Radio Frequency)信号が入出力できるように切り替えを行うセクタ切替部9と、信号系統の送受信の切り替えを行う送受信切替器10と、送受信切替器10から受信RF信号を受信してIF(Intermediate Frequency)信号に変換する受信部11と、受信部11から入力されたIF信号の目標検出を行う信号処理部12と、検出目標の追尾を行うデータ処理部13と、検出目標の追尾状況を表示する表示・操作部14と、n個の空中線部1〜4nの各設定方位を計算してn個の空中線駆動部5〜8nの制御を行うための制御データを生成する空中線駆動制御部15と、方位全周を常時走査する捜索ビームを形成するための制御データを生成するビーム制御部16と、ビーム制御部16が生成した制御データを送受信切替器10へ送信する送信部17とを備えている。
【0018】
すなわち、図1に示すレーダ装置は、N面のフェーズドアレイアンテナから成る空中線部(#1)1〜空中線部(#N)4nとセクタ切替部9とを接続し、このセクタ切替部9によって、送受信RF信号の入出力を実行する空中線部1〜4nを適宜に切り替える。また、セクタ切替部9から送受信切替器10へ接続して受信RF信号を受信部11へ伝送する。さらに、送受信切替器10は、送信部17からの送信RF信号を受信してセクタ切替部9へ伝送する。
【0019】
また、送受信切替器10から受信部11へ入力された受信RF信号は、受信IF信号に変換された後に、信号処理部12で目標検出を行い、さらに、データ処理部13で検出目標の追尾を行う。そして、検出目標の追尾状況は表示・操作部14の画面に表示されて、操作員が検出目標の追尾状況を視認する。また、データ処理部13による追尾処理結果はビーム制御部16へ伝送され、追尾目標に対して照射する追尾ビームを形成するための制御データが生成される。さらに、ビーム制御部16では、方位全周を常時走査する捜索ビームを形成するための制御データも生成される。これらの制御データは、送信部17→送受信切替器10→セクタ切替部9→空中線部(#1)1〜空中線部(#N)4のルートで伝送される。
【0020】
また、送信部17は、ビーム制御部16で生成された制御データに基づいて、送信RF信号を生成して送受信切替器10へ伝送し、さらに、セクタ切替部9が、所定の空中線部のRF信号が空中線部(#1)1〜空中線部(#N)4nへ入出力できるように切り替えを行う。そして、空中線部(#1)1〜空中線部(#N)4nでは、それぞれのフェーズドアレイアンテナが所定の方向にビームを形成する。
【0021】
また、操作員は、表示・操作部14にて目標の追尾状況を視認し、特に重点的に監視が必要と判断した特定方位を手動で表示・操作部14より入力する。これによって、特定方位のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。ここで、空中線駆動制御部15は、特定方位のデータに応じて、その方位へのビーム形成に用いるフェーズドアレイアンテナの開口の大きさやアンテナ素子数が増大するように、各空中線部1〜4nの設定方位を計算すると共に方位制御データを生成する。また、操作員は、機能を喪失した空中線部のデータを表示・操作部14より手動で入力する。
【0022】
これによって、機能が喪失した空中線部のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。そして、空中線駆動制御部15は、機能が喪失した空中線部のデータの内容に応じて、当該空中線部が分担していた監視方位範囲を他の空中線部で補完できるように、各空中線部の設定方位を計算すると共に、方位制御データを生成する。さらに、空中線駆動制御部15で生成された方位制御データは、空中線駆動部(#1)5〜空中線駆動部(#N)8nへ伝送され、各空中線部1〜4nが所定の方位に設定されるように機械的に作動させる。
【0023】
次に、信号の流れに沿って第1実施形態のレーダ装置の動作を詳細に説明する。N面のフェーズドアレイアンテナから成る空中線部(#1)1〜空中線部(#N)4nで受信された受信RF信号は、セクタ切替部9を経由して送受信切替器10へ伝送される。このとき、セクタ切替部9は、ビーム制御部16からの制御信号によって、どの空中線部からの受信RF信号を入力するかを選択的に切り替える。送受信切替器10は、セクタ切替部9から入力された受信RF信号を受信部11へ伝送する。そして、受信部11が、受信RF信号をIF信号に変換し信号処理部12へ伝送する。
【0024】
さらに、信号処理部12が、目標に相当する信号を抽出する目標検出処理を行い、目標の検出時刻、位置情報などの目標検出データをデータ処理部13へ伝送する。これによって、データ処理部13は、目標検出データに基づいて、現時点における目標位置、速度、および針路の推定や、未来時刻の目標位置、速度、および針路の予測を行う。そして、データ処理部13は、推定した目標位置、速度、および針路のデータを表示・操作部14へ伝送し、表示・操作部14において、表示画面に目標の位置、速度、および針路のデータなどを表示して、操作員に視認させる。
【0025】
また、データ処理部13で得られる未来時刻の目標位置のデータはビーム制御部16へ伝送され、ビーム制御部16が、当該時刻になったら目標位置に対してビームを照射する追尾ビームの制御データを生成する。なお、ビーム制御部16は、追尾ビームの他に、方位全周を常時ビーム走査するための捜索ビームの制御データも生成する。ビーム制御部16で生成された制御データは、送信部17→送受信切替器10→セクタ切替部9→空中線部(#1)1〜空中線部(#N)4nのルートで伝送される。
【0026】
このとき、送信部17は、制御データにより指定される所定のタイミングで送信RF信号を発生し、この送信RF信号を、送受信切替器10を経由してセクタ切替部9へ伝送する。セクタ切替部9は、ビーム制御部16からの制御データに基づいて、所定の方位にビームを形成するよう空中線部(#1)1〜空中線部(#N)4nのうち、必要な空中線部に送信RF信号の伝送先を切り替える。そして、空中線部(#1)1〜空中線部(#N)4nは、入力されたRF送信信号と、ビーム制御部16からの制御データとに基づいて、所定の空中線部のフェーズドアレイアンテナが送信ビームを形成する。
【0027】
一方、操作員は、表示・操作部14に表示される目標の位置、速度、進行方向、および種別などのデータから状況を把握し、必要と判断する場合には、重点的に監視を行うための特定方位を表示・操作部14から手動で指定する。このとき指定した特定方位のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。これによって、空中線駆動制御部15は、特定方位へのビーム形成に用いるフェーズドアレイアンテナの開口の大きさやアンテナ素子数が増大するように、各空中線部の方位設定角度を計算する。通常は、1つの空中線部でビーム形成を行うが、特定方位へは複数の空中線部を同時に用いてビーム形成を行う。
【0028】
ここで、複数の空中線部で特定方位のビーム形成を行うように空中線部の方位設定角を変えると、方位全周を走査する捜索ビームを形成する際に、アンテナ開口の法線方向に対して左右のいずれかに大きくビーム形成の方位を傾ける必要が生じる。その結果、ビーム形成方位から見たアンテナ開口が実効的に小さくなるために、目標の探知性能の低下を招くおそれがある。また、ビームの半値幅が大きくなるために、方位分解性能も低下する。このような悪影響を軽減させるために、特定方位へビームを形成する空中線部の方位設定角だけでなく、それ以外の領域へビームを形成する空中線部の方位設定角も変化させる。
【0029】
また、操作員は、機能を喪失した空中線部のデータを表示・操作部14から手動で入力する。これによって、機能を喪失した空中線部のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。ここで、空中線部の機能が喪失されると、その空中線部が分担していた方位範囲のビーム走査ができなくなる。そのため、機能を喪失した空中線部の情報に応じて、その空中線部が分担していたビーム走査範囲を他の空中線部で補完できるように、空中線駆動制御部15は、各空中線部の設定方位を計算すると共に方位制御データを生成する。そして、空中線駆動制御部15で計算された各空中線部の設定方位角は空中線駆動部5〜8に伝送され、空中線部(#1)1〜空中線部(#N)4nがそれぞれ指定の方位に設定されるよう機械的に作動させる。
【0030】
以上説明したように、本発明のレーダ装置は、フェーズドアレイアンテナを有する空中線部1〜4nの方位を機械的に変更するための空中線駆動部5〜8nを設け、さらに、それらの空中線部1〜4nの設定方位を計算して空中線駆動部5〜8nを制御するための制御データを生成する空中線駆動制御部15を設けている。これによって、操作員が表示・操作部14から指定した特定方位へのビームを形成するためのフェーズドアレイアンテナのアンテナ素子数を増大させ、さらに、水平方向のアンテナ開口を等価的に増大させるように、空中線駆動制御部15が、各空中線部1〜4nのアンテナ開口の設定方位を決定し、対応する方位制御データを生成する。
【0031】
また、機能を喪失した空中線部を操作員が表示・操作部14から指定することにより、機能を喪失した空中線部が分担していた監視方位範囲を、他の空中線部で補完できるように、空中線駆動制御部15が各空中線部のアンテナ開口の設定方位を決定し、対応する方位制御データを生成する。そして、その方位制御データは空中線駆動部5〜8nへ送信され、それらの空中線駆動部5〜8nがその方位制御データにしたがって各空中線部1〜4nの方位を機械的に設定する。これによって、特定方位の目標の探知性能や方位分解性能を高めることができると共に、複数のフェーズドアレイアンテナのうちの少なくとも1つが機能を喪失しても、そのフェーズドアレイアンテナが分担していた方位範囲の監視機能を維持することができ、方位全周の常時走査を行うこともできる。
【0032】
《第2実施形態》
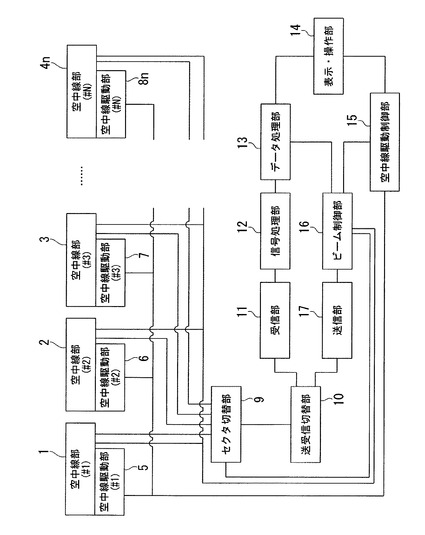
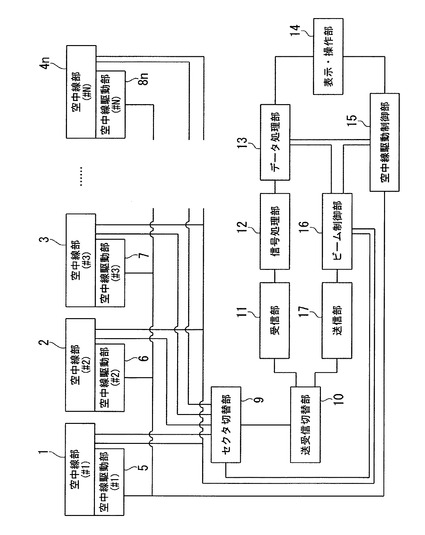
図2は、N個の空中線部を有して特定方位を自動的に変更する第2実施形態のレーダ装置の構成図である。第2実施形態では、操作員が指定した重点監視を必要とする目標の存在する方位を自動的に特定方位に設定すると共に、その目標の移動に伴い特定方位を自動的に変更することができるように構成されている。したがって、構成上、図1と異なる点は、データ処理部13と空中線駆動制御部15が接続されている点である。そのため、図2のデータ処理部13と表示・操作部14は、図1のそれらとは異なる処理を行う。データ処理部13と表示・操作部14の細部処理については図3のフローチャートを用いて説明する。
【0033】
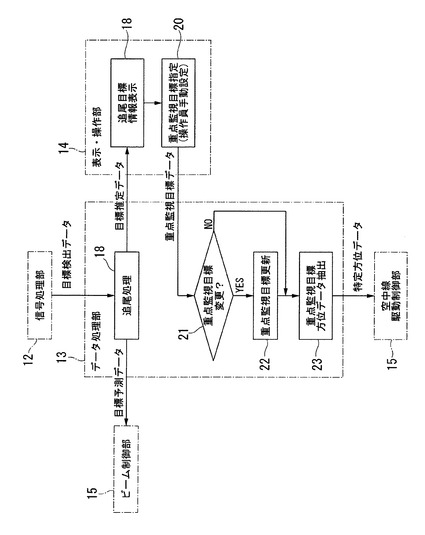
図3は、図2におけるデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。すなわち、図3は、図2に示すレーダ装置において特定方位を自動的に変更するためのデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。なお、図3のフローチャートでは、データ処理部13および表示・操作部14以外に、周辺要素である信号処理部12、空中線駆動制御部15、およびビーム制御部16が表示されている。
【0034】
図3に示すように、信号処理部12からデータ処理部13へ入力される目標検出データを用い、追尾処理18によって、現時点の目標の位置、速度、および針路の推定、未来時刻の目標の位置、速度、および針路の予測を行う。そして、目標予測データはビーム制御部16へ伝送され、目標推定データは表示・操作部14へ伝送される。ここで、表示・操作部14は、目標推定データに基づく追尾目標情報表示19にて画面表示データの生成と画面表示を行う。
【0035】
さらに、操作員が、表示・操作部14から手動設定操作で行う重点監視目標指定20は、追尾目標に対して重点監視目標の指定がなされた場合には、重点監視目標データがデータ処理部13に伝送され、データ処理部13において重点監視目標変更の有無の判定21が行われる。ここで、既存の重点監視目標から変更があった場合や初めて重点監視目標が設定された場合には(21でYES)、重点監視目標更新22にて既存の重点監視目標を削除し、新たに指定した目標を重点監視目標とする。
【0036】
さらに、データ処理部13における重点監視目標方位データ抽出23では、現在追尾中の複数の目標の位置データの中から、重点監視目標の方位データが抽出される。そして、抽出された方位データが特定方位データとして空中線駆動制御部15へ伝送される。
【実施例】
【0037】
次に、上記の各実施形態で述べたレーダ装置の動作について、具体的な実施例を説明する。
【0038】
《第1実施例》
図4は、4個の空中線部を有する実施例1のレーダ装置の構成図である。すなわち、図4は、4個の空中線部により4面のフェーズドアレイアンテナを有するレーダ装置の場合の実施例を示している。なお、図4の構成および基本動作は、空中線部の数量が4個である以外は前述の図1の構成と同じである。
【0039】
図4において、セクタ切替9およびビーム制御部16は、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24に接続してデータの授受を行う。また、空中線駆動制御部15は、空中線駆動部(#1)1〜空中線駆動部(#3)3および空中線駆動部(#4)25に接続して各空中線部の設定方位角を伝送する。図5を用いて、特定方位を指定した場合の空中線駆動制御部15における各空中線部の設定方位の計算例を説明する。
【0040】
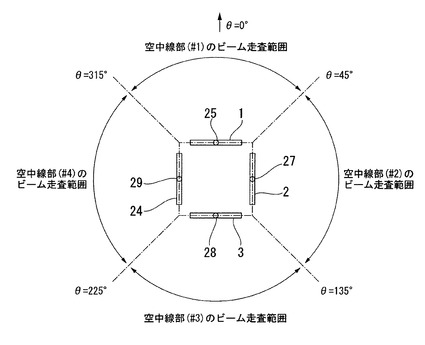
図5は、図4に示すレーダ装置において、特定方位の指定が無い場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。なお、図5は、4面のフェーズドアレイアンテナを上方から見下ろしたときの、各フェーズドアレイアンテナの配置とビーム走査範囲を表している。図5において、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24は、それぞれのフェーズドアレイアンテナの中心26〜29を軸として回転動作を行い、空中線部の方位を変更させる。
【0041】
ここで、説明を簡単にするために、空中線部(#1)1のアンテナ開口の法線方向を方位θ=0°とし、時計回りにθが増大するものと定義する。特定方位の指定が無い場合は、図5に示す通り、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24の方位設定角を、それぞれ、θ1=0°、θ2=90°、θ3=180°、およびθ4=270°に設定する。また、それぞれの空中線部が受け持つビーム走査方位範囲は、空中線部(#1)1はθ=315°〜360°および0°〜45°、空中線部(#2)2はθ=45°〜135°、空中線部(#3)3はθ=135°〜225°、および空中線部(#4)24はθ=225°〜315°である。
【0042】
ここで、操作員により特定方位が指定された場合は、特定方位へのビーム形成に用いるフェーズドアレイアンテナのアンテナ開口の大きさやアンテナ素子数が増大するように、各空中線部の方位設定角度を計算する。このとき、特定方位に対して隣り合う2面のフェーズドアレイアンテナを用いてビーム形成すると共に、残りの2面のフェーズドアレイアンテナにより方位全周の走査ビームによる走査が維持できるように各空中線部の方位設定角度を計算する。
【0043】
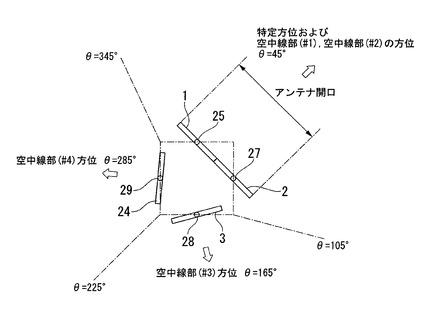
図6は、図4に示すレーダ装置において、特定方位が指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。すなわち、図6は、特定方位をθ=45°と指定した場合の空中線駆動制御部15における各空中線部の設定方位の計算例とビーム走査範囲の例を示している。この図の例の場合は、空中線部(#1)1と空中線部(#2)2の2面のフェーズドアレイアンテナの方位設定をθ=45°と設定して、ビーム形成に用いるアンテナ開口とアンテナ素子数の増大化を図っている。
【0044】
その結果、1つのフェーズドアレイアンテナで法線方向にビームを形成する場合と比較して、アンテナ開口の方位方向の大きさはおよそ2倍、アンテナ素子数も2倍となる。一般的なレーダ技術(例えば、レーダ技術:昭和63年7月1日5版 電子情報通信学会発行)によれば、アンテナ開口の垂直方向の大きさを一定とすると、目標の探知性能(最大探知距離)はアンテナ開口の方位方向の大きさの2乗に比例する。従って、図6の場合では、1つのフェーズドアレイアンテナで法線方向にビームを形成する場合と比較すると、最大探知距離が約1.7倍に向上する。
【0045】
また、ビームの方位方向の半値幅はアンテナ開口の方位方向の大きさに反比例するので、同様に比較すると半値幅は1/2となり、その結果、方位方向分解性能が2倍に向上する。空中線部(#1)1と空中線部(#2)2の2面のフェーズドアレイアンテナの設定方位を変更したことにより、それぞれのフェーズドアレイアンテナが受け持つビーム走査範囲を図5と同じとした場合、例えば空中線部(#2)2はθ=45°〜135°であるから、アンテナ開口の法線方向θ=45°に対して0°〜90°ビームを方位方向に傾ける必要が生じる。
【0046】
しかし、アンテナ開口の法線方向に対して90°傾けてビーム形成することは不可能であり、また、アンテナ開口の法線方向に対して90°以下であっても、法線方向から大きくビームを傾けると、ビーム方向の放射電力の低下による目標探知性能の低下、ビームの半値幅増大による方位分解性能の低下を招くおそれがある。
【0047】
そこで、これらの性能低下を軽減させるために、空中線部(#3)3と空中線部(#4)24の方位設定角も変化させる。図6の例では、空中線部(#3)3は方位設定角θ=165°、空中線部(#4)24は方位設定角θ=285°として、それぞれの空中線部が受け持つビーム走査方位範囲を、空中線部(#1)1と空中線部(#2)2はθ=345°〜360°および0°〜105°、空中線部(#3)3はθ=105°〜225°、空中線部(#4)24はθ=225°〜345°とする。これにより、各空中線部はその法線方向に対して±60°以内でのビーム傾斜によって、それぞれが分担する方位範囲のビーム走査が可能となる。
【0048】
以上は特定方位をθ=45°と指定した場合の各空中線部のフェーズドアレイアンテナの配置とビーム走査範囲の説明であるが、特定方位がθ=0°〜90°の範囲内で指定された場合には、同様の配置によりビーム走査を行う。特定方位がθ=90°〜180°の範囲内で指定された場合には、空中線部(#2)2と空中線部(#3)3の方位設定角をθ=135°として2面のフェーズドアレイアンテナで特定方位へビーム形成を行うと共に、空中線部(#4)24と空中線部(#1)1の方位設定角も、前記と同様の要領にて各空中線部のビーム走査方位範囲が均等になるように設定する。
【0049】
同様に、特定方位がθ=180°〜270°の範囲内で指定された場合には、空中線部(#3)3と空中線部(#4)24の方位設定角をθ=225°に設定し、残りの空中線部も前記と同様に設定する。特定方位がθ=180°〜270°の範囲内で指定された場合には、空中線部(#3)3と空中線部(#4)24の方位設定角をθ=225°に設定し、残りの空中線部も前記と同様に設定する。特定方位がθ=270°〜360°の範囲内で指定された場合には、空中線部(#4)24と空中線部(#1)1の方位設定角をθ=315°に設定し、残りの空中線部も前記と同様に設定する。
【0050】
このように、方位全周を4等分した領域のうち、特定方位がどの領域にあるかによって2面のフェーズドアレイアンテナの方位設定角を決定している。2面のフェーズドアレイアンテナで特定方位へビーム形成を行う場合、指定した特定方位によってはアンテナ開口の法線方向に対して最大±45°ビームを傾ける必要が生じる。アンテナ開口の法線方向にビームを形成する場合が最も目標探知性能、方位分解性能が高く、ビームの傾きが大きくなるほど目標探知性能および方位分解性能が低下する。そのため、アンテナ開口の法線に対して+45°または−45°ビームを方位方向に傾けたときに、目標探知性能や方位分解性能が最も低下する。このときのアンテナ開口の水平方向の実効的な大きさは、フェーズドアレイアンテナ1つ分の大きさの約1.4倍である。前述の通り、目標探知性能はセクタの実効的な開口の大きさの2乗に比例し、方位分解性能は実効的な開口の大きさにそのまま比例する。
【0051】
したがって、このような最も性能が低下する条件であっても、フェーズドアレイアンテナ1面で法線方向にビームを形成する場合と比較して、本実施例のようにフェーズドアレイアンテナ2面でビームを形成した方が、目標探知性能は約1.4倍、方位分解性能も約1.4倍に向上する。
【0052】
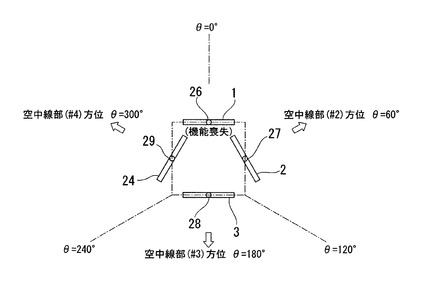
図7は、図4に示すレーダ装置において、機能喪失セクタが指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。すなわち、図7は、操作員が空中線部(#1)1の機能が喪失したと指定した場合の、空中線駆動制御部15における各空中線部の設定方位の計算例とビーム走査範囲の例を示している。
【0053】
フェーズドアレイアンテナ3面で方位全周360°のビーム走査を行うために、各空中線部がその法線方向に対して±60°の範囲をビーム走査するように方位設定角を変更する。図7の例では、空中線部(#2)2の方位設定角をθ=60°、空中線部(#3)3の方位設定角をθ=180°、空中線部(#4)24の方位設定角をθ=300°に設定する。このような設定により、空中線部(#2)2のビーム走査範囲をθ=0°〜120°、空中線部(#3)3のビーム走査範囲をθ=120°〜240°、空中線部(#4)24のビーム走査範囲をθ=240°〜360°として、3個の空中線部で方位全周のビーム走査を維持する。
【0054】
同様に、空中線部(#2)2の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=30°、空中線部(#3)3の方位設定角をθ=150°、空中線部(#4)24の方位設定角をθ=270°に設定し、空中線部(#3)3の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=0°、空中線部(#2)2の方位設定角をθ=120°、空中線部(#4)24の方位設定角をθ=240°に設定し、空中線部(#4)24の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=330°、空中線部(#2)2の方位設定角をθ=90°、空中線部(#3)3の方位設定角をθ=210°に設定することにより、いずれの場合も3個の空中線部で方位全周のビーム走査を維持する。
【0055】
《第2実施例》
図8は、4個の空中線部を有し特定方位を自動的に変更する実施例2のレーダ装置の構成図である。すなわち、図8は、4個の空中線部によりフェーズドアレイアンテナを4面有するレーダ装置において、操作員が指定した重点監視を必要とする目標の存在する方位を自動的に特定方位に設定すると共に、その目標の移動に伴い特定方位を自動的に変更する場合の実施例を示している。なお、図8の構成および基本動作は、空中線部の数量が4個である以外は前述の図2の構成と同じである。
【0056】
基本的なレーダ動作は前述の第1実施例と同じであるが、データ処理部13と表示・操作部14の処理によって本実施例の動作を実現するので、前述の図3を用いてその処理の詳細を説明する。信号処理部12からデータ処理部13へ入力された目標検出データを用いて、追尾処理18にて現時点での目標の位置、速度、および針路の推定、未来時刻の目標の位置、速度、および針路の予測を行う。
【0057】
目標予測データはビーム制御部16へ伝送され、当該時刻になったら目標位置に対してビームを照射する追尾ビームの制御データを生成する。また、目標推定データは、表示操作部14へ伝送され、ここで、追尾目標情報表示19にて画面表示データの生成、および画面表示を行う。また、重点監視目標指定20は操作員による手動設定操作であり、ここで追尾目標に対して重点監視目標の指定を行うことができる。重点監視目標の指定が行われると、その重点監視目標データがデータ処理部13に伝送され、重点監視目標変更の有無の判定21が行われる。
【0058】
ここで、既存の重点監視目標から変更があった場合や初めて重点監視目標を設定する場合には「変更あり」と判断し、重点監視目標更新22にて既存の重点監視目標を削除して、新たに指定した目標を重点監視目標とする。一方、重点監視目標は「変更なし」と判断された場合には、現状設定されている重点監視目標をそのまま維持する。さらに、重点監視目標方位データ抽出23では、現在追尾中の複数の目標の位置データの中から、重点監視目標の方位データを抽出する。ここで抽出された方位データを特定方位データとして空中線駆動制御部15へ伝送する。
【0059】
以降の処理は、実施例1と同様に、図8の空中線駆動制御部15において特定方位データに基づき各空中線部の方位設定角を計算し、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24は所定の方位に設定される。以上のような処理によって、時間経過とともに重点監視目標の位置、速度、および針路が変化しても、操作員が特定方位を逐次手動操作により設定する必要がなく、自動的に重点監視目標の方位を特定方位として設定することができる。
【0060】
以上、本発明を2つの実施形態および2つの実施例に基づき具体的に説明したが、本発明は前記の各実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【0061】
なお、本発明によるレーダの制御方法は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、本発明によるレーダの制御方法の処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしてもよい。
【0062】
また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【産業上の利用可能性】
【0063】
本発明のレーダ装置によれば、特定方位に対してレーダ性能を向上させることができると共に、方位全周監視システムとしての可用性を向上させることができるので、航空管制用のレーダ装置などに有効に利用することができる。
【符号の説明】
【0064】
1 空中線部(#1)
2 空中線部(#2)
3 空中線部(#3)
4n 空中線部(#N)
5 空中線駆動部(#1)
6 空中線駆動部(#2)
7 空中線駆動部(#3)
8n 空中線駆動部(#N)
9 セクタ切替部
10 送受信切替器
11 受信部
12 信号処理部
13 データ処理部
14 表示・操作部
15 空中線駆動制御部
16 ビーム制御部
17 送信部
18 追尾処理
19 追尾目標情報表示
20 重点監視目標指定
21 重点監視目標変更判定
22 重点監視目標更新
23 重点監視目標方位データ抽出
24 空中線部(#4)
25 空中線駆動部(#4)
26 空中線部#1回転軸
27 空中線部#2回転軸
28 空中線部#3回転軸
29 空中線部#4回転軸
【技術分野】
【0001】
本発明は、レーダ装置等に関し、特に,可動フェーズドアレイアンテナによって監視制御を行うレーダ装置、レーダの制御方法、および、その方法をコンピュータに実行させるプログラムに関する。
【背景技術】
【0002】
レーダ装置は、遠距離の小目標を高い分解能で追尾できる性能を有することが望ましい。このような性能を満足させるために、アレイアンテナを複数組み合わせて、それぞれのアレイアンテナの位置情報と放射ビーム指向方向のデータから最適な放射開口面を選定することにより、単独のアレイアンテナより大きな開口面のアンテナを等価的に形成したレーダ装置の技術が知られている(例えば、特許文献1参照)。この技術によれば、アレイアンテナの開口面を等価的に大きくすることができるので、より遠距離の小目標を高方位分解能で追尾することができる。
【0003】
また、空中線アンテナの開口面からビームが送信される指向角度が大きくなった場合であってもビーム形成時の利得の低下を抑え、目標対象の検出率の低下を防ぐことができるレーダ装置の技術も知られている(例えば、特許文献2参照)。この技術によれば、目標対象物へ指向させるビームの利得を算出し、算出された利得が要求される利得を満たさない場合は、機械的に空中線アンテナを駆動してその空中線アンテナの開口面を目標対象の方向へ機械的に指向させている。その結果、空中線アンテナの開口面からビームが送信される指向角度が大きくなった場合でも、ビーム形成時の利得の低下を抑え、目標対象の検出率の低下を防ぐことができる。
【0004】
また、方位方向にビーム走査を行う複数のアンテナを有するレーダ装置であって、隣接するアンテナのビーム走査範囲を一部重複させることにより、その重複する領域への一定時間内にビームを照射する回数を増加させて追尾精度を向上させると共に、複数のアンテナを備えた空中線装置全体を機械的に回転させることにより、隣接するアンテナのビーム走査範囲が重複する領域を任意の方位に設定することができるレーダ装置の技術も知られている(例えば、特許文献3参照)。この技術によれば、表示器にて指定した対象目標の方位が、隣り合う2つのアンテナのスキャンビームがオーバーラップする領域内に位置するように空中線装置を回動制御させているので、指定した対象目標は隣り合う2つのアンテナのビームにより夫々受信されることになる。そのため、スキャン毎に得られる目標からの受信データ数は2倍に増えるので、優先的に追尾すべき方位あるいは目標の追尾データレートの向上を図ることができ、追尾精度を向上させることができる。また、オーバーラップ領域で目標を追尾している状態から、当該目標がオーバーラップ領域外に移動することが予測される場合でも、目標の追尾予測位置の方位情報により、オーバーラップ領域内にて対象目標が継続して追尾できるように、空中線装置を機械的に回転させることで、データレート高速化状態の継続化を図ることができ、高精度の追尾を維持することが可能となる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−292614号公報
【特許文献2】特開2000−258531号公報
【特許文献3】特開2006−153517号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
すなわち、前記特許文献1の技術は、アレイアンテナを複数組み合わせることでアンテナ開口面を大きくして、重点的な方位に絞って目標探知性能や方位分解性能を向上させることができる。しかしながら、曲面上にアンテナ素子を配列した構成となっているので、ビーム照射方向以外への電力放射によるロスが大きくなる。そのため、アンテナ開口面の大きさやアレイアンテナ全体から放射される単位電力量当りの目標探知性能は低下する。また、特許文献2の技術は、機械的に空中線アンテナを駆動させることにより重点的な方位に的を絞って目標探知性能や方位分解性能を向上させることはできるが、駆動機構が故障した場合には重点的な方位への追尾を行うことができない。また、前記特許文献3の技術はアンテナ開口を増大させる手段を有していないため、特定方位の目標探知性能と方位分解性能を向上させることができない。さらに、この公報の技術では、複数のアンテナのうち1つのアンテナが機能を喪失した場合は、そのアンテナが分担していたビーム走査範囲の監視機能が喪失してしまう。
【0007】
また、特許文献3のレーダ装置においては、フェーズドアレイアンテナの各素子の送信電力が均一で固定の場合は、目標物の探知性能がビーム形成に寄与するアンテナの素子数に依存し、方位分解性能がフェーズドアレイアンテナのアンテナ開口面の水平方向の大きさに依存するが、アンテナ形状が固定であるために素子数やアンテナ開口面の大きさを増大させることができない。そのため、重点的に監視が必要な方位が生じた場合に、その方位の目標探知性能や方位分解性能を向上させることができない。また、それぞれのフェーズドアレイアンテナが予め決められた方位範囲しか監視できないため、アンテナ開口の設定方位がそれぞれ異なる複数のフェーズドアレイアンテナを有するレーダ装置においては、1つのフェーズドアレイアンテナが機能を喪失した場合は特定方位範囲に対する監視機能が失われてしまう。
【0008】
すなわち、前記特許文献2,3のいずれの技術を単独又は組み合わせて用いても、複数のアンテナのうち少なくとも1つのアンテナが機能を喪失した場合は、機能喪失したアンテナが分担していたビーム走査範囲の監視機能を他の健全なアンテナで補完することができない。さらに、複数のアンテナのうち少なくとも1つのアンテナが機能を喪失しても、重点的な方位に的を絞って目標探知性能や方位分解性能を向上させることはできるが、方位全周を網羅して監視することはできない。また、前記特許文献1の技術を適用したとしても、目標探知性能を効率的に向上させることができないという課題は依然として解決されない。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、必要に応じて特定の方位範囲に対する目標の探知性能や方位分解性能を高めると共に、複数のフェーズドアレイアンテナのうちの少なくとも1つが機能を喪失しても、そのフェーズドアレイアンテナが分担していた方位範囲の監視機能を維持することができ、かつ方位全周の常時走査も行うことができるレーダ装置、レーダの制御方法、および、その方法をコンピュータに実行させるプログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明に係るレーダ装置は、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、特定方位に対して隣り合う2つのフェーズドアレイアンテナを駆動して特定方位へのビームを形成すると共に、残りのフェーズドアレイアンテナが補完して方位全周へのビームを形成するように構成されている。
【0011】
本発明に係るレーダ装置の好適な実施形態としては、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、任意の特定方位を入力する表示・操作部と、表示・操作部から入力された特定方位のレーダ性能を向上させるように、複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する空中線駆動制御部と、方位全周へビームが走査するように複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、空中線駆動制御部が計算したアンテナ開口の設定方位に基づいて、所望のフェーズドアレイアンテナの方位を機械的に回転させる空中線駆動部とを備える構成を採っている。
【0012】
また、本発明はレーダ装置によるレーダの制御方法を提供することもできる。すなわち、異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置によるレーダの制御方法であって、任意の特定方位を入力する第1のステップと、第1のステップで入力された特定方位のレーダ性能を向上させるように、複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する第2のステップと、方位全周へビームが走査するように複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、第2のステップで計算されたアンテナ開口の設定方位に基づいて、所望のフェーズドアレイアンテナの方位を機械的に回転させる第3のステップとを含むレーダの制御方法を提供することもできる。
【0013】
また、本発明は、前記発明によるレーダの制御方法をコンピュータに実行させるプログラムを提供することもできる。
【発明の効果】
【0014】
本発明のレーダ装置によれば、各空中線部(各フェーズドアレイアンテナ)の方位を機械的に変更し、特定方位へのビームを形成するアンテナ素子数を増大させることにより、フェーズドアレイアンテナのアンテナ開口から放射される送信電力を増大させると共に、水平方向のアンテナ開口を等価的に増大させることができるので、ビームのピーク値を高くしてそのビームの半値幅を小さくすることができる。その結果、特定方位に対して目標探知性能と方位分解性能を向上させることができる。また、機能を喪失した空中線部が分担していた監視方位範囲に対しては、他の健全な空中線部が代替してビーム走査を行うように各空中線部の方位を機械的に変更できるため、1つの空中線部の機能が喪失しても、その空中線部に割り当てられていた方位範囲の監視機能を維持することができる。さらに、機能を喪失した空中線部が存在していても、全ての健全な空中線部によって方位全周を網羅して監視を維持することもできる。
【図面の簡単な説明】
【0015】
【図1】N個の空中線部を有する第1実施形態のレーダ装置の構成図である。
【図2】N個の空中線部を有し特定方位を自動的に変更する第2実施形態のレーダ装置の構成図である。
【図3】図2におけるデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。
【図4】4個の空中線部を有する実施例1のレーダ装置の構成図である。
【図5】図4に示すレーダ装置において、特定方位の指定が無い場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図6】図4に示すレーダ装置において、特定方位が指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図7】図4に示すレーダ装置において、機能喪失セクタが指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。
【図8】4個の空中線部を有し特定方位を自動的に変更する実施例2のレーダ装置の構成図である。
【発明を実施するための形態】
【0016】
以下、図面を参照しながら、本発明に係るレーダ装置の幾つかの実施形態について詳細に説明する。なお、各実施形態を説明するための全図において、同一要素は原則として同一の符号を付し、その繰り返しの説明は省略する。
【0017】
《第1実施形態》
図1は、N個の空中線部を有する第1実施形態のレーダ装置の構成図である。図1に示すように、レーダ装置は、フェーズドアレイアンテナを有するn個の空中線部1〜4nと、空中線部1〜4nのそれぞれの方位を機械的に変更するためのn個の空中線駆動部5〜8nと、所定の空中線部のRF(Radio Frequency)信号が入出力できるように切り替えを行うセクタ切替部9と、信号系統の送受信の切り替えを行う送受信切替器10と、送受信切替器10から受信RF信号を受信してIF(Intermediate Frequency)信号に変換する受信部11と、受信部11から入力されたIF信号の目標検出を行う信号処理部12と、検出目標の追尾を行うデータ処理部13と、検出目標の追尾状況を表示する表示・操作部14と、n個の空中線部1〜4nの各設定方位を計算してn個の空中線駆動部5〜8nの制御を行うための制御データを生成する空中線駆動制御部15と、方位全周を常時走査する捜索ビームを形成するための制御データを生成するビーム制御部16と、ビーム制御部16が生成した制御データを送受信切替器10へ送信する送信部17とを備えている。
【0018】
すなわち、図1に示すレーダ装置は、N面のフェーズドアレイアンテナから成る空中線部(#1)1〜空中線部(#N)4nとセクタ切替部9とを接続し、このセクタ切替部9によって、送受信RF信号の入出力を実行する空中線部1〜4nを適宜に切り替える。また、セクタ切替部9から送受信切替器10へ接続して受信RF信号を受信部11へ伝送する。さらに、送受信切替器10は、送信部17からの送信RF信号を受信してセクタ切替部9へ伝送する。
【0019】
また、送受信切替器10から受信部11へ入力された受信RF信号は、受信IF信号に変換された後に、信号処理部12で目標検出を行い、さらに、データ処理部13で検出目標の追尾を行う。そして、検出目標の追尾状況は表示・操作部14の画面に表示されて、操作員が検出目標の追尾状況を視認する。また、データ処理部13による追尾処理結果はビーム制御部16へ伝送され、追尾目標に対して照射する追尾ビームを形成するための制御データが生成される。さらに、ビーム制御部16では、方位全周を常時走査する捜索ビームを形成するための制御データも生成される。これらの制御データは、送信部17→送受信切替器10→セクタ切替部9→空中線部(#1)1〜空中線部(#N)4のルートで伝送される。
【0020】
また、送信部17は、ビーム制御部16で生成された制御データに基づいて、送信RF信号を生成して送受信切替器10へ伝送し、さらに、セクタ切替部9が、所定の空中線部のRF信号が空中線部(#1)1〜空中線部(#N)4nへ入出力できるように切り替えを行う。そして、空中線部(#1)1〜空中線部(#N)4nでは、それぞれのフェーズドアレイアンテナが所定の方向にビームを形成する。
【0021】
また、操作員は、表示・操作部14にて目標の追尾状況を視認し、特に重点的に監視が必要と判断した特定方位を手動で表示・操作部14より入力する。これによって、特定方位のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。ここで、空中線駆動制御部15は、特定方位のデータに応じて、その方位へのビーム形成に用いるフェーズドアレイアンテナの開口の大きさやアンテナ素子数が増大するように、各空中線部1〜4nの設定方位を計算すると共に方位制御データを生成する。また、操作員は、機能を喪失した空中線部のデータを表示・操作部14より手動で入力する。
【0022】
これによって、機能が喪失した空中線部のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。そして、空中線駆動制御部15は、機能が喪失した空中線部のデータの内容に応じて、当該空中線部が分担していた監視方位範囲を他の空中線部で補完できるように、各空中線部の設定方位を計算すると共に、方位制御データを生成する。さらに、空中線駆動制御部15で生成された方位制御データは、空中線駆動部(#1)5〜空中線駆動部(#N)8nへ伝送され、各空中線部1〜4nが所定の方位に設定されるように機械的に作動させる。
【0023】
次に、信号の流れに沿って第1実施形態のレーダ装置の動作を詳細に説明する。N面のフェーズドアレイアンテナから成る空中線部(#1)1〜空中線部(#N)4nで受信された受信RF信号は、セクタ切替部9を経由して送受信切替器10へ伝送される。このとき、セクタ切替部9は、ビーム制御部16からの制御信号によって、どの空中線部からの受信RF信号を入力するかを選択的に切り替える。送受信切替器10は、セクタ切替部9から入力された受信RF信号を受信部11へ伝送する。そして、受信部11が、受信RF信号をIF信号に変換し信号処理部12へ伝送する。
【0024】
さらに、信号処理部12が、目標に相当する信号を抽出する目標検出処理を行い、目標の検出時刻、位置情報などの目標検出データをデータ処理部13へ伝送する。これによって、データ処理部13は、目標検出データに基づいて、現時点における目標位置、速度、および針路の推定や、未来時刻の目標位置、速度、および針路の予測を行う。そして、データ処理部13は、推定した目標位置、速度、および針路のデータを表示・操作部14へ伝送し、表示・操作部14において、表示画面に目標の位置、速度、および針路のデータなどを表示して、操作員に視認させる。
【0025】
また、データ処理部13で得られる未来時刻の目標位置のデータはビーム制御部16へ伝送され、ビーム制御部16が、当該時刻になったら目標位置に対してビームを照射する追尾ビームの制御データを生成する。なお、ビーム制御部16は、追尾ビームの他に、方位全周を常時ビーム走査するための捜索ビームの制御データも生成する。ビーム制御部16で生成された制御データは、送信部17→送受信切替器10→セクタ切替部9→空中線部(#1)1〜空中線部(#N)4nのルートで伝送される。
【0026】
このとき、送信部17は、制御データにより指定される所定のタイミングで送信RF信号を発生し、この送信RF信号を、送受信切替器10を経由してセクタ切替部9へ伝送する。セクタ切替部9は、ビーム制御部16からの制御データに基づいて、所定の方位にビームを形成するよう空中線部(#1)1〜空中線部(#N)4nのうち、必要な空中線部に送信RF信号の伝送先を切り替える。そして、空中線部(#1)1〜空中線部(#N)4nは、入力されたRF送信信号と、ビーム制御部16からの制御データとに基づいて、所定の空中線部のフェーズドアレイアンテナが送信ビームを形成する。
【0027】
一方、操作員は、表示・操作部14に表示される目標の位置、速度、進行方向、および種別などのデータから状況を把握し、必要と判断する場合には、重点的に監視を行うための特定方位を表示・操作部14から手動で指定する。このとき指定した特定方位のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。これによって、空中線駆動制御部15は、特定方位へのビーム形成に用いるフェーズドアレイアンテナの開口の大きさやアンテナ素子数が増大するように、各空中線部の方位設定角度を計算する。通常は、1つの空中線部でビーム形成を行うが、特定方位へは複数の空中線部を同時に用いてビーム形成を行う。
【0028】
ここで、複数の空中線部で特定方位のビーム形成を行うように空中線部の方位設定角を変えると、方位全周を走査する捜索ビームを形成する際に、アンテナ開口の法線方向に対して左右のいずれかに大きくビーム形成の方位を傾ける必要が生じる。その結果、ビーム形成方位から見たアンテナ開口が実効的に小さくなるために、目標の探知性能の低下を招くおそれがある。また、ビームの半値幅が大きくなるために、方位分解性能も低下する。このような悪影響を軽減させるために、特定方位へビームを形成する空中線部の方位設定角だけでなく、それ以外の領域へビームを形成する空中線部の方位設定角も変化させる。
【0029】
また、操作員は、機能を喪失した空中線部のデータを表示・操作部14から手動で入力する。これによって、機能を喪失した空中線部のデータは、表示・操作部14から空中線駆動制御部15へ伝送される。ここで、空中線部の機能が喪失されると、その空中線部が分担していた方位範囲のビーム走査ができなくなる。そのため、機能を喪失した空中線部の情報に応じて、その空中線部が分担していたビーム走査範囲を他の空中線部で補完できるように、空中線駆動制御部15は、各空中線部の設定方位を計算すると共に方位制御データを生成する。そして、空中線駆動制御部15で計算された各空中線部の設定方位角は空中線駆動部5〜8に伝送され、空中線部(#1)1〜空中線部(#N)4nがそれぞれ指定の方位に設定されるよう機械的に作動させる。
【0030】
以上説明したように、本発明のレーダ装置は、フェーズドアレイアンテナを有する空中線部1〜4nの方位を機械的に変更するための空中線駆動部5〜8nを設け、さらに、それらの空中線部1〜4nの設定方位を計算して空中線駆動部5〜8nを制御するための制御データを生成する空中線駆動制御部15を設けている。これによって、操作員が表示・操作部14から指定した特定方位へのビームを形成するためのフェーズドアレイアンテナのアンテナ素子数を増大させ、さらに、水平方向のアンテナ開口を等価的に増大させるように、空中線駆動制御部15が、各空中線部1〜4nのアンテナ開口の設定方位を決定し、対応する方位制御データを生成する。
【0031】
また、機能を喪失した空中線部を操作員が表示・操作部14から指定することにより、機能を喪失した空中線部が分担していた監視方位範囲を、他の空中線部で補完できるように、空中線駆動制御部15が各空中線部のアンテナ開口の設定方位を決定し、対応する方位制御データを生成する。そして、その方位制御データは空中線駆動部5〜8nへ送信され、それらの空中線駆動部5〜8nがその方位制御データにしたがって各空中線部1〜4nの方位を機械的に設定する。これによって、特定方位の目標の探知性能や方位分解性能を高めることができると共に、複数のフェーズドアレイアンテナのうちの少なくとも1つが機能を喪失しても、そのフェーズドアレイアンテナが分担していた方位範囲の監視機能を維持することができ、方位全周の常時走査を行うこともできる。
【0032】
《第2実施形態》
図2は、N個の空中線部を有して特定方位を自動的に変更する第2実施形態のレーダ装置の構成図である。第2実施形態では、操作員が指定した重点監視を必要とする目標の存在する方位を自動的に特定方位に設定すると共に、その目標の移動に伴い特定方位を自動的に変更することができるように構成されている。したがって、構成上、図1と異なる点は、データ処理部13と空中線駆動制御部15が接続されている点である。そのため、図2のデータ処理部13と表示・操作部14は、図1のそれらとは異なる処理を行う。データ処理部13と表示・操作部14の細部処理については図3のフローチャートを用いて説明する。
【0033】
図3は、図2におけるデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。すなわち、図3は、図2に示すレーダ装置において特定方位を自動的に変更するためのデータ処理部13および表示・操作部14の処理の流れを示すフローチャートである。なお、図3のフローチャートでは、データ処理部13および表示・操作部14以外に、周辺要素である信号処理部12、空中線駆動制御部15、およびビーム制御部16が表示されている。
【0034】
図3に示すように、信号処理部12からデータ処理部13へ入力される目標検出データを用い、追尾処理18によって、現時点の目標の位置、速度、および針路の推定、未来時刻の目標の位置、速度、および針路の予測を行う。そして、目標予測データはビーム制御部16へ伝送され、目標推定データは表示・操作部14へ伝送される。ここで、表示・操作部14は、目標推定データに基づく追尾目標情報表示19にて画面表示データの生成と画面表示を行う。
【0035】
さらに、操作員が、表示・操作部14から手動設定操作で行う重点監視目標指定20は、追尾目標に対して重点監視目標の指定がなされた場合には、重点監視目標データがデータ処理部13に伝送され、データ処理部13において重点監視目標変更の有無の判定21が行われる。ここで、既存の重点監視目標から変更があった場合や初めて重点監視目標が設定された場合には(21でYES)、重点監視目標更新22にて既存の重点監視目標を削除し、新たに指定した目標を重点監視目標とする。
【0036】
さらに、データ処理部13における重点監視目標方位データ抽出23では、現在追尾中の複数の目標の位置データの中から、重点監視目標の方位データが抽出される。そして、抽出された方位データが特定方位データとして空中線駆動制御部15へ伝送される。
【実施例】
【0037】
次に、上記の各実施形態で述べたレーダ装置の動作について、具体的な実施例を説明する。
【0038】
《第1実施例》
図4は、4個の空中線部を有する実施例1のレーダ装置の構成図である。すなわち、図4は、4個の空中線部により4面のフェーズドアレイアンテナを有するレーダ装置の場合の実施例を示している。なお、図4の構成および基本動作は、空中線部の数量が4個である以外は前述の図1の構成と同じである。
【0039】
図4において、セクタ切替9およびビーム制御部16は、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24に接続してデータの授受を行う。また、空中線駆動制御部15は、空中線駆動部(#1)1〜空中線駆動部(#3)3および空中線駆動部(#4)25に接続して各空中線部の設定方位角を伝送する。図5を用いて、特定方位を指定した場合の空中線駆動制御部15における各空中線部の設定方位の計算例を説明する。
【0040】
図5は、図4に示すレーダ装置において、特定方位の指定が無い場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。なお、図5は、4面のフェーズドアレイアンテナを上方から見下ろしたときの、各フェーズドアレイアンテナの配置とビーム走査範囲を表している。図5において、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24は、それぞれのフェーズドアレイアンテナの中心26〜29を軸として回転動作を行い、空中線部の方位を変更させる。
【0041】
ここで、説明を簡単にするために、空中線部(#1)1のアンテナ開口の法線方向を方位θ=0°とし、時計回りにθが増大するものと定義する。特定方位の指定が無い場合は、図5に示す通り、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24の方位設定角を、それぞれ、θ1=0°、θ2=90°、θ3=180°、およびθ4=270°に設定する。また、それぞれの空中線部が受け持つビーム走査方位範囲は、空中線部(#1)1はθ=315°〜360°および0°〜45°、空中線部(#2)2はθ=45°〜135°、空中線部(#3)3はθ=135°〜225°、および空中線部(#4)24はθ=225°〜315°である。
【0042】
ここで、操作員により特定方位が指定された場合は、特定方位へのビーム形成に用いるフェーズドアレイアンテナのアンテナ開口の大きさやアンテナ素子数が増大するように、各空中線部の方位設定角度を計算する。このとき、特定方位に対して隣り合う2面のフェーズドアレイアンテナを用いてビーム形成すると共に、残りの2面のフェーズドアレイアンテナにより方位全周の走査ビームによる走査が維持できるように各空中線部の方位設定角度を計算する。
【0043】
図6は、図4に示すレーダ装置において、特定方位が指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。すなわち、図6は、特定方位をθ=45°と指定した場合の空中線駆動制御部15における各空中線部の設定方位の計算例とビーム走査範囲の例を示している。この図の例の場合は、空中線部(#1)1と空中線部(#2)2の2面のフェーズドアレイアンテナの方位設定をθ=45°と設定して、ビーム形成に用いるアンテナ開口とアンテナ素子数の増大化を図っている。
【0044】
その結果、1つのフェーズドアレイアンテナで法線方向にビームを形成する場合と比較して、アンテナ開口の方位方向の大きさはおよそ2倍、アンテナ素子数も2倍となる。一般的なレーダ技術(例えば、レーダ技術:昭和63年7月1日5版 電子情報通信学会発行)によれば、アンテナ開口の垂直方向の大きさを一定とすると、目標の探知性能(最大探知距離)はアンテナ開口の方位方向の大きさの2乗に比例する。従って、図6の場合では、1つのフェーズドアレイアンテナで法線方向にビームを形成する場合と比較すると、最大探知距離が約1.7倍に向上する。
【0045】
また、ビームの方位方向の半値幅はアンテナ開口の方位方向の大きさに反比例するので、同様に比較すると半値幅は1/2となり、その結果、方位方向分解性能が2倍に向上する。空中線部(#1)1と空中線部(#2)2の2面のフェーズドアレイアンテナの設定方位を変更したことにより、それぞれのフェーズドアレイアンテナが受け持つビーム走査範囲を図5と同じとした場合、例えば空中線部(#2)2はθ=45°〜135°であるから、アンテナ開口の法線方向θ=45°に対して0°〜90°ビームを方位方向に傾ける必要が生じる。
【0046】
しかし、アンテナ開口の法線方向に対して90°傾けてビーム形成することは不可能であり、また、アンテナ開口の法線方向に対して90°以下であっても、法線方向から大きくビームを傾けると、ビーム方向の放射電力の低下による目標探知性能の低下、ビームの半値幅増大による方位分解性能の低下を招くおそれがある。
【0047】
そこで、これらの性能低下を軽減させるために、空中線部(#3)3と空中線部(#4)24の方位設定角も変化させる。図6の例では、空中線部(#3)3は方位設定角θ=165°、空中線部(#4)24は方位設定角θ=285°として、それぞれの空中線部が受け持つビーム走査方位範囲を、空中線部(#1)1と空中線部(#2)2はθ=345°〜360°および0°〜105°、空中線部(#3)3はθ=105°〜225°、空中線部(#4)24はθ=225°〜345°とする。これにより、各空中線部はその法線方向に対して±60°以内でのビーム傾斜によって、それぞれが分担する方位範囲のビーム走査が可能となる。
【0048】
以上は特定方位をθ=45°と指定した場合の各空中線部のフェーズドアレイアンテナの配置とビーム走査範囲の説明であるが、特定方位がθ=0°〜90°の範囲内で指定された場合には、同様の配置によりビーム走査を行う。特定方位がθ=90°〜180°の範囲内で指定された場合には、空中線部(#2)2と空中線部(#3)3の方位設定角をθ=135°として2面のフェーズドアレイアンテナで特定方位へビーム形成を行うと共に、空中線部(#4)24と空中線部(#1)1の方位設定角も、前記と同様の要領にて各空中線部のビーム走査方位範囲が均等になるように設定する。
【0049】
同様に、特定方位がθ=180°〜270°の範囲内で指定された場合には、空中線部(#3)3と空中線部(#4)24の方位設定角をθ=225°に設定し、残りの空中線部も前記と同様に設定する。特定方位がθ=180°〜270°の範囲内で指定された場合には、空中線部(#3)3と空中線部(#4)24の方位設定角をθ=225°に設定し、残りの空中線部も前記と同様に設定する。特定方位がθ=270°〜360°の範囲内で指定された場合には、空中線部(#4)24と空中線部(#1)1の方位設定角をθ=315°に設定し、残りの空中線部も前記と同様に設定する。
【0050】
このように、方位全周を4等分した領域のうち、特定方位がどの領域にあるかによって2面のフェーズドアレイアンテナの方位設定角を決定している。2面のフェーズドアレイアンテナで特定方位へビーム形成を行う場合、指定した特定方位によってはアンテナ開口の法線方向に対して最大±45°ビームを傾ける必要が生じる。アンテナ開口の法線方向にビームを形成する場合が最も目標探知性能、方位分解性能が高く、ビームの傾きが大きくなるほど目標探知性能および方位分解性能が低下する。そのため、アンテナ開口の法線に対して+45°または−45°ビームを方位方向に傾けたときに、目標探知性能や方位分解性能が最も低下する。このときのアンテナ開口の水平方向の実効的な大きさは、フェーズドアレイアンテナ1つ分の大きさの約1.4倍である。前述の通り、目標探知性能はセクタの実効的な開口の大きさの2乗に比例し、方位分解性能は実効的な開口の大きさにそのまま比例する。
【0051】
したがって、このような最も性能が低下する条件であっても、フェーズドアレイアンテナ1面で法線方向にビームを形成する場合と比較して、本実施例のようにフェーズドアレイアンテナ2面でビームを形成した方が、目標探知性能は約1.4倍、方位分解性能も約1.4倍に向上する。
【0052】
図7は、図4に示すレーダ装置において、機能喪失セクタが指定された場合の各セクタの設定方位およびビーム走査範囲の一例を示す図である。すなわち、図7は、操作員が空中線部(#1)1の機能が喪失したと指定した場合の、空中線駆動制御部15における各空中線部の設定方位の計算例とビーム走査範囲の例を示している。
【0053】
フェーズドアレイアンテナ3面で方位全周360°のビーム走査を行うために、各空中線部がその法線方向に対して±60°の範囲をビーム走査するように方位設定角を変更する。図7の例では、空中線部(#2)2の方位設定角をθ=60°、空中線部(#3)3の方位設定角をθ=180°、空中線部(#4)24の方位設定角をθ=300°に設定する。このような設定により、空中線部(#2)2のビーム走査範囲をθ=0°〜120°、空中線部(#3)3のビーム走査範囲をθ=120°〜240°、空中線部(#4)24のビーム走査範囲をθ=240°〜360°として、3個の空中線部で方位全周のビーム走査を維持する。
【0054】
同様に、空中線部(#2)2の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=30°、空中線部(#3)3の方位設定角をθ=150°、空中線部(#4)24の方位設定角をθ=270°に設定し、空中線部(#3)3の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=0°、空中線部(#2)2の方位設定角をθ=120°、空中線部(#4)24の方位設定角をθ=240°に設定し、空中線部(#4)24の機能喪失が操作員により指定された場合には、空中線部(#1)1の方位設定角をθ=330°、空中線部(#2)2の方位設定角をθ=90°、空中線部(#3)3の方位設定角をθ=210°に設定することにより、いずれの場合も3個の空中線部で方位全周のビーム走査を維持する。
【0055】
《第2実施例》
図8は、4個の空中線部を有し特定方位を自動的に変更する実施例2のレーダ装置の構成図である。すなわち、図8は、4個の空中線部によりフェーズドアレイアンテナを4面有するレーダ装置において、操作員が指定した重点監視を必要とする目標の存在する方位を自動的に特定方位に設定すると共に、その目標の移動に伴い特定方位を自動的に変更する場合の実施例を示している。なお、図8の構成および基本動作は、空中線部の数量が4個である以外は前述の図2の構成と同じである。
【0056】
基本的なレーダ動作は前述の第1実施例と同じであるが、データ処理部13と表示・操作部14の処理によって本実施例の動作を実現するので、前述の図3を用いてその処理の詳細を説明する。信号処理部12からデータ処理部13へ入力された目標検出データを用いて、追尾処理18にて現時点での目標の位置、速度、および針路の推定、未来時刻の目標の位置、速度、および針路の予測を行う。
【0057】
目標予測データはビーム制御部16へ伝送され、当該時刻になったら目標位置に対してビームを照射する追尾ビームの制御データを生成する。また、目標推定データは、表示操作部14へ伝送され、ここで、追尾目標情報表示19にて画面表示データの生成、および画面表示を行う。また、重点監視目標指定20は操作員による手動設定操作であり、ここで追尾目標に対して重点監視目標の指定を行うことができる。重点監視目標の指定が行われると、その重点監視目標データがデータ処理部13に伝送され、重点監視目標変更の有無の判定21が行われる。
【0058】
ここで、既存の重点監視目標から変更があった場合や初めて重点監視目標を設定する場合には「変更あり」と判断し、重点監視目標更新22にて既存の重点監視目標を削除して、新たに指定した目標を重点監視目標とする。一方、重点監視目標は「変更なし」と判断された場合には、現状設定されている重点監視目標をそのまま維持する。さらに、重点監視目標方位データ抽出23では、現在追尾中の複数の目標の位置データの中から、重点監視目標の方位データを抽出する。ここで抽出された方位データを特定方位データとして空中線駆動制御部15へ伝送する。
【0059】
以降の処理は、実施例1と同様に、図8の空中線駆動制御部15において特定方位データに基づき各空中線部の方位設定角を計算し、空中線部(#1)1〜空中線部(#3)3および空中線部(#4)24は所定の方位に設定される。以上のような処理によって、時間経過とともに重点監視目標の位置、速度、および針路が変化しても、操作員が特定方位を逐次手動操作により設定する必要がなく、自動的に重点監視目標の方位を特定方位として設定することができる。
【0060】
以上、本発明を2つの実施形態および2つの実施例に基づき具体的に説明したが、本発明は前記の各実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。
【0061】
なお、本発明によるレーダの制御方法は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、本発明によるレーダの制御方法の処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしてもよい。
【0062】
また、上記プログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、前述した機能をすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
【産業上の利用可能性】
【0063】
本発明のレーダ装置によれば、特定方位に対してレーダ性能を向上させることができると共に、方位全周監視システムとしての可用性を向上させることができるので、航空管制用のレーダ装置などに有効に利用することができる。
【符号の説明】
【0064】
1 空中線部(#1)
2 空中線部(#2)
3 空中線部(#3)
4n 空中線部(#N)
5 空中線駆動部(#1)
6 空中線駆動部(#2)
7 空中線駆動部(#3)
8n 空中線駆動部(#N)
9 セクタ切替部
10 送受信切替器
11 受信部
12 信号処理部
13 データ処理部
14 表示・操作部
15 空中線駆動制御部
16 ビーム制御部
17 送信部
18 追尾処理
19 追尾目標情報表示
20 重点監視目標指定
21 重点監視目標変更判定
22 重点監視目標更新
23 重点監視目標方位データ抽出
24 空中線部(#4)
25 空中線駆動部(#4)
26 空中線部#1回転軸
27 空中線部#2回転軸
28 空中線部#3回転軸
29 空中線部#4回転軸
【特許請求の範囲】
【請求項1】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、
特定方位に対して隣り合う2つの前記フェーズドアレイアンテナを駆動して該特定方位へのビームを形成すると共に、残りの前記フェーズドアレイアンテナが補完して方位全周へのビームを形成するように構成されたことを特徴とするレーダ装置。
【請求項2】
機能喪失したフェーズドアレイアンテナによるビームの方位は、残りの健全なフェーズドアレイアンテナによって補完されることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、
任意の特定方位を入力する表示・操作部と、
前記表示・操作部から入力された特定方位のレーダ性能を向上させるように、前記複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する空中線駆動制御部と、
方位全周へビームが走査するように前記複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、前記空中線駆動制御部が計算したアンテナ開口の設定方位に基づいて、前記所望のフェーズドアレイアンテナの方位を機械的に回転させる空中線駆動部と
を備えることを特徴とするレーダ装置。
【請求項4】
前記表示・操作部から機能喪失したフェーズドアレイアンテナの情報が入力されたとき、
前記空中線駆動制御部は、前記表示・操作部へ入力された情報に基づいて、方位全周の監視機能を維持するように残りのフェーズドアレイアンテナのアンテナ開口の設定方位を再計算し、
前記空中線駆動部は、前記空中線駆動制御部が再計算したアンテナ開口の設定方位に基づいて、前記残りのフェーズドアレイアンテナの方位を機械的に回転させることを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記表示・操作部から入力された任意の重点監視目標の方位を特定方位として設定し、その特定方位に対応するデータを生成するデータ処理部をさらに備え、
前記空中線駆動部は、前記データ処理部からのデータに基づいて、前記特定方位のレーダ性能を向上させるように該当するフェーズドアレイアンテナの方位を機械的に回転させことを特徴とする請求項3又は4に記載のレーダ装置。
【請求項6】
前記所望のフェーズドアレイアンテナは、前記特定方位に対して隣り合う2つのフェーズドアレイアンテナであり、
前記特定方位のレーダ性能の向上は、前記2つのフェーズドアレイアンテナによって合成された合成ビームによって実現されることを特徴とする請求項5に記載のレーダ装置。
【請求項7】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置によるレーダの制御方法であって、
任意の特定方位を入力する第1のステップと、
前記第1のステップで入力された特定方位のレーダ性能を向上させるように、前記複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する第2のステップと、
方位全周へビームが走査するように前記複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、前記第2のステップで計算されたアンテナ開口の設定方位に基づいて、前記所望のフェーズドアレイアンテナの方位を機械的に回転させる第3のステップと
を含むことを特徴とするレーダの制御方法。
【請求項8】
前記第1のステップで機能喪失したフェーズドアレイアンテナの情報が入力されたときは、
前記第2のステップにおいて、前記第1のステップで入力された情報に基づいて、方位全周の監視機能を維持するように残りのフェーズドアレイアンテナのアンテナ開口の設定方位を再計算し、
前記第3のステップにおいて、前記第2のステップで再計算されたアンテナ開口の設定方位に基づいて、前記残りのフェーズドアレイアンテナの方位を機械的に回転させることを特徴とする請求項7に記載のレーダの制御方法。
【請求項9】
前記第1のステップで入力された任意の重点監視目標の方位を特定方位として設定したとき、
前記第2のステップにおいて、その特定方位に基づいて該当するフェーズドアレイアンテナの方位を決定するデータ処理を行い、
前記第3のステップにおいて、前記第2のステップで行われたデータ処理の内容に基づいて所望のフェーズドアレイアンテナの方位を機械的に回転させる
ことを特徴とする請求項7又は8に記載のレーダの制御方法。
【請求項10】
前記所望のフェーズドアレイアンテナは、前記設定方位に対して隣り合う2つのフェーズドアレイアンテナであり、
前記設定方位のレーダ性能の向上は、前記2つのフェーズドアレイアンテナによって合成された合成ビームによって実現されることを特徴とする請求項9に記載のレーダの制御方法。
【請求項11】
請求項7乃至10のいずれか1項に記載のレーダの制御方法をコンピュータに実行させるプログラム。
【請求項1】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、
特定方位に対して隣り合う2つの前記フェーズドアレイアンテナを駆動して該特定方位へのビームを形成すると共に、残りの前記フェーズドアレイアンテナが補完して方位全周へのビームを形成するように構成されたことを特徴とするレーダ装置。
【請求項2】
機能喪失したフェーズドアレイアンテナによるビームの方位は、残りの健全なフェーズドアレイアンテナによって補完されることを特徴とする請求項1に記載のレーダ装置。
【請求項3】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置であって、
任意の特定方位を入力する表示・操作部と、
前記表示・操作部から入力された特定方位のレーダ性能を向上させるように、前記複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する空中線駆動制御部と、
方位全周へビームが走査するように前記複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、前記空中線駆動制御部が計算したアンテナ開口の設定方位に基づいて、前記所望のフェーズドアレイアンテナの方位を機械的に回転させる空中線駆動部と
を備えることを特徴とするレーダ装置。
【請求項4】
前記表示・操作部から機能喪失したフェーズドアレイアンテナの情報が入力されたとき、
前記空中線駆動制御部は、前記表示・操作部へ入力された情報に基づいて、方位全周の監視機能を維持するように残りのフェーズドアレイアンテナのアンテナ開口の設定方位を再計算し、
前記空中線駆動部は、前記空中線駆動制御部が再計算したアンテナ開口の設定方位に基づいて、前記残りのフェーズドアレイアンテナの方位を機械的に回転させることを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記表示・操作部から入力された任意の重点監視目標の方位を特定方位として設定し、その特定方位に対応するデータを生成するデータ処理部をさらに備え、
前記空中線駆動部は、前記データ処理部からのデータに基づいて、前記特定方位のレーダ性能を向上させるように該当するフェーズドアレイアンテナの方位を機械的に回転させことを特徴とする請求項3又は4に記載のレーダ装置。
【請求項6】
前記所望のフェーズドアレイアンテナは、前記特定方位に対して隣り合う2つのフェーズドアレイアンテナであり、
前記特定方位のレーダ性能の向上は、前記2つのフェーズドアレイアンテナによって合成された合成ビームによって実現されることを特徴とする請求項5に記載のレーダ装置。
【請求項7】
異なる方位に向けて設置された複数のフェーズドアレイアンテナを備えるレーダ装置によるレーダの制御方法であって、
任意の特定方位を入力する第1のステップと、
前記第1のステップで入力された特定方位のレーダ性能を向上させるように、前記複数のフェーズドアレイアンテナのうち、所望のフェーズドアレイアンテナのアンテナ開口の設定方位を計算する第2のステップと、
方位全周へビームが走査するように前記複数のフェーズドアレイアンテナの方位を機械的に回転させると共に、前記第2のステップで計算されたアンテナ開口の設定方位に基づいて、前記所望のフェーズドアレイアンテナの方位を機械的に回転させる第3のステップと
を含むことを特徴とするレーダの制御方法。
【請求項8】
前記第1のステップで機能喪失したフェーズドアレイアンテナの情報が入力されたときは、
前記第2のステップにおいて、前記第1のステップで入力された情報に基づいて、方位全周の監視機能を維持するように残りのフェーズドアレイアンテナのアンテナ開口の設定方位を再計算し、
前記第3のステップにおいて、前記第2のステップで再計算されたアンテナ開口の設定方位に基づいて、前記残りのフェーズドアレイアンテナの方位を機械的に回転させることを特徴とする請求項7に記載のレーダの制御方法。
【請求項9】
前記第1のステップで入力された任意の重点監視目標の方位を特定方位として設定したとき、
前記第2のステップにおいて、その特定方位に基づいて該当するフェーズドアレイアンテナの方位を決定するデータ処理を行い、
前記第3のステップにおいて、前記第2のステップで行われたデータ処理の内容に基づいて所望のフェーズドアレイアンテナの方位を機械的に回転させる
ことを特徴とする請求項7又は8に記載のレーダの制御方法。
【請求項10】
前記所望のフェーズドアレイアンテナは、前記設定方位に対して隣り合う2つのフェーズドアレイアンテナであり、
前記設定方位のレーダ性能の向上は、前記2つのフェーズドアレイアンテナによって合成された合成ビームによって実現されることを特徴とする請求項9に記載のレーダの制御方法。
【請求項11】
請求項7乃至10のいずれか1項に記載のレーダの制御方法をコンピュータに実行させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−203801(P2010−203801A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−46850(P2009−46850)
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]