
レーダ装置、及び干渉防止方法
【課題】電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供すること。
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
【解決手段】レーダ装置10、20は、目標物に対して送信電波を送信しその反射波を受信して目標物を検出する。通信装置30は他車に搭載されたレーダ装置に関するレーダ装置情報と走行情報を受信する。通信装置30は受信したレーダ装置情報等に基づいて、自車と他車とが近接する場合等、一定の送信電波停止条件を満たすときに、レーダ装置10、20から送信電波の送信を停止させる。また、通信装置30は送信電波を停止後、自車と他車とが近接しなくなった場合等、一定の送信電波再開条件を満たすとき送信電波の送信を再開させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置、及び干渉防止方法に関する。詳しくは、電波干渉を十分軽減するようにしたレーダ装置等に関する。
【背景技術】
【0002】
一般に車載用に搭載されたレーダ装置は、目標物からの反射波を受信することで目標物の距離や速度等を検出する。かかるレーダ装置は、同じ周波数帯を使用する他の車載用レーダ装置からの送信波を受信する場合もあり、目標物の反射波として誤検出してしまい、所謂干渉と呼ばれる現象が発生する。
【0003】
干渉の問題に対して、移動体通信の分野では予め周波数帯域や送信周期を割り付けて干渉の発生を抑え、干渉が発生したとき別の帯域等に割り付けを行うことで干渉を防止する方法が知られている。
【0004】
しかし、車載用のレーダ装置では使用できる周波数帯域が限られており、数多くのレーダ装置が近接すると割り付けの数が足りなくなってしまい、干渉の問題は避けることができない。
【0005】
かかる問題に対して従来では、VICS(道路交通情報通信システム)情報を基にして、自車両が上り方向か下り方向かを判断し、送信する電波を水平偏波か垂直偏波かに切替えて対向する車両のレーダ装置間での干渉を防止するようにしたレーダ装置が開示されている(例えば、以下の特許文献1)。
【特許文献1】特開平11−248837号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のように、送信電波の偏波角をずらしたとしても、上り方向と下り方向とで車両が互いに近接したとき、必ずしも干渉の発生を防止できるわけではなく、少なからず干渉が発生する。従って、このようなレーダ装置では、目標物を誤検出する可能性がある。
【0007】
そこで、本発明は上記問題点に鑑みてなされたもので、その目的は、電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の一実施態様によれば、レーダ装置において、他車と通信を行う通信手段と、前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、目標物を検出するための送信電波の送信を停止させる制御手段とを備えることを特徴とする。
【0009】
また、本発明の他の実施態様によれば、前記レーダ装置において、前記電波送信停止条件を満たすときとは、自車が他車に近接したとき、又は自車と他車の電波送信方向が重なっているとき、又は自車と他車の前記送信電波の送信中心周波数と送信周波数帯域とが重なっているとき、又は自車と他車の過去一定時間の高低差が所定以内であるとき、又は自車と他車の過去一定時間の高低変化から所定以内の高低差になるとき、又はこれらの条件のうち複数の条件に適合するとき、であることを特徴とする。
【0010】
更に、本発明の他の実施態様によれば、前記レーダ装置において、前記制御手段は、前記電波送信停止条件を満たすときに自車と他車との優先度を判断し、前記自車の前記優先度が低いと判断したとき前記送信電波の送信を停止させることを特徴とする。
【0011】
更に、本発明の他の実施態様によれば、前記レーダ装置において、前記制御手段は、前記送信電波の送信を停止した後、送信電波再開条件を満たすとき前記送信電波の送信を再開させることを特徴とする。
【0012】
また、上記目的を達成するために本発明の他の実施態様によれば、他車と通信するための通信手段を備え、目標物に対して送信電波を送信しその反射波を受信することで前記目標物を検出するレーダ装置における干渉防止方法において、前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、前記送信電波の送信を停止させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供することができる。
【発明を実施するための最良の形態】
【0014】
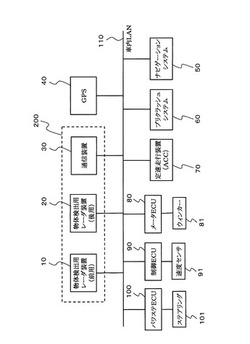
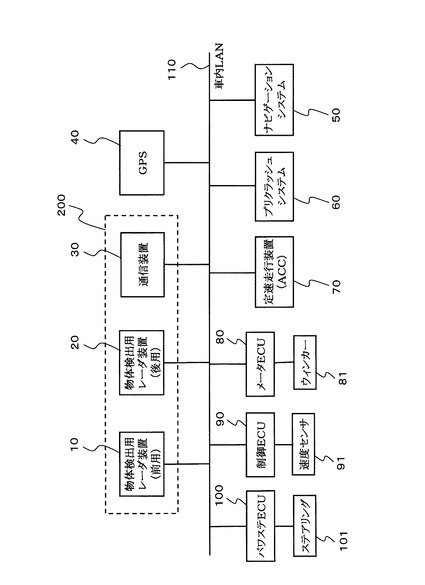
本発明を実施するための最良の形態について以下図面を参照しながら説明する。図1は、物体検出用レーダ装置10、20と通信装置30が車内LANネットワークシステム1に接続された例を示す図である。
【0015】
車内LANネットワークシステム1は、人工衛星等を介して車両の位置情報を取得するGPS(Global Positioning System)40と、地図情報を有しモニタに現在の車両位置等を表示するナビゲーションシステム50と、車両の衝突を軽減するプリクラッシュシステム60と、レーダ装置10、20からの検出結果に基づいて他車両との車間距離を一定に保つよう車両を制御する定速走行装置(ACC:Adaptive Cruise Control)70と、車両内の種々のハードウェアを制御する種々のECU(Electric Control Unit)80、90、100、及びレーダシステム200を備える。これらは、車内LAN110を介して互いに接続される。
【0016】
図1の例では、車内LANネットワークシステム1として、「CAN」(Controller Area Network)と呼ばれるシリアル通信プロトコルでデータの送受信が行われる。CANはISO(International Organization for Standardization)で標準化されたプロトコルで、マルチマスタ方式等の特徴がある。
【0017】
また、図1ではECUの例として、メータECU80と、制御ECU90と、パワーステアリング(パワステ)ECU100を示している。メータECU80には、ウィンカー81が接続され、制御ECU90には速度センサ91が接続され、パワステECU100にはステアリング101が接続される。車内LAN110には、それ以外のエンジン系のECUや情報系のECUが接続されてもよい。
【0018】
レーダシステム200は、電波を送受信して車両前方の物体を検出するための前方物体検出用レーダ装置10と、同じく電波の送受信により車両後方の物体を検出するための後方物体検出用レーダ装置20と、車両間との通信や路側に設置された装置と通信するための通信装置30を備える。
【0019】
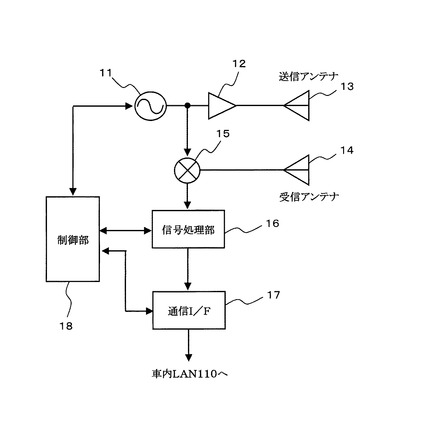
図2は、両レーダ装置10、20の構成例を示す図である。双方のレーダ装置10、20とも同じ構成である。
【0020】
レーダ装置10、20は、パルス発振回路11と、アンプ12と、送信アンテナ13と、受信アンテナ14と、ミキサ15と、信号処理部16と、通信インターフェース(I/F)17、及び制御部18を備える。
【0021】
パルス発振回路11は所定周波数の送信信号(例えば高周波信号)を生成する。アンプ12は送信信号を増幅し、送信アンテナ13は増幅された送信信号に基づいて送信電波を送信する。
【0022】
受信アンテナ14は送信電波の物体に対する反射波を受信する。ミキサ15は、受信アンテナ14からの受信信号とパルス発振回路11からの送信信号とをミキシングする。
【0023】
信号処理部16は、ミキシングされた受信信号に基づいて、物体の距離、速度等の検出の処理を行う。検出結果の情報は、通信I/F17から車内LAN110に出力される。
【0024】
また、制御部18は、パルス発振回路11や信号処理部16、通信I/F17を制御する。詳細は後述する。
【0025】
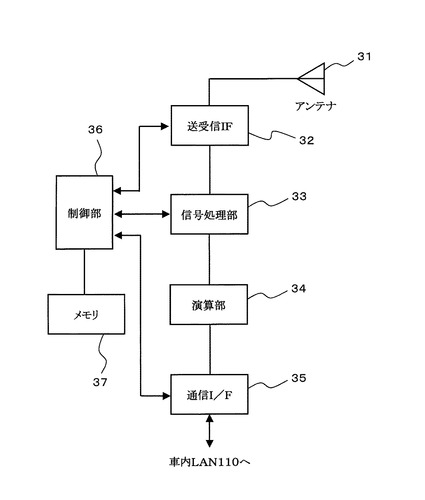
図3は通信装置30の構成例を示す図である。通信装置30は、送受信アンテナ31と、送受信I/F32と、信号処理部33と、演算部34と、通信I/F35と、制御部36、及びメモリ37を備える。
【0026】
送受信アンテナ31は他の車両等と通信を行うためのアンテナである。送受信I/F32は、送受信アンテナ31と信号処理部33とのインターフェースである。例えば、送受信アンテナ31で受信した受信電波を信号処理部33で処理できるデータに変換する。
【0027】
信号処理部33は、送受信I/F32からのデータに基づいて、他車に関する情報を得るための種々の信号処理を行う。
【0028】
演算部34は、信号処理部33で得られた情報や、通信I/F35を介して車内LAN110に接続されたECU80、90、100等からの情報に基づいて種々の演算を行う。
【0029】
制御部36は、送受信I/F32と、信号処理部33、通信I/F35に対する制御を行う。詳細は後述する。また、制御部36にはメモリ37が接続される。メモリ37には、自通信装置30に関する情報が記憶される。
【0030】
次に、レーダ装置10、20と通信装置30を含むレーダシステム200の動作について説明する。本実施例において通信装置30は、GPS40やナビゲーションシステム50を基に走行情報を他の車両の通信装置に送信する。また、通信装置30は自車に搭載されるレーダ装置10、20に関するレーダ装置情報も送信する。
【0031】
走行情報とは、例えば、自車位置や速度、高低(海抜)、進行方向(東西南北)などの情報である。
【0032】
また、レーダ装置情報とは、例えば、レーダ装置が搭載された搭載位置(前方、後方、側方など)、レーダ装置が遠距離用のものか近距離用のものか、現在電波を送信しているか停止しているかの稼動状態、電波送信中心周波数や電波送信周波数帯域、電波送信周期、電波送信開始時間等の情報である。自車両のレーダ装置情報は、通信装置30のメモリ37に記憶されてもよいし、レーダ装置10、20の制御部18内のメモリ等に記憶されてもよい。
【0033】
一方、通信装置30は他の車両の通信装置から走行情報や他の車両に搭載されたレーダ装置情報も受信する。
【0034】
そして、通信装置30は、他の車両からの走行情報等に基づいて、近接した他の車両からレーダ装置情報を受信したときに、レーダ装置10、20に対して電波送信命令を出力し、レーダ装置10、20からの電波の送信を停止させる。自車両の電波送信を停止させることで、車両間での電波干渉が十分低減させる、或いは干渉を発生させないようにすることができる。
【0035】
詳細に説明する。まず、GPS40から自車位置の情報が通信装置30に出力される。自車位置情報は通信装置30の通信I/F35、演算部34を介して制御部36に出力される。
【0036】
一方、通信装置30の送受信アンテナ31は他車の走行情報を受信する。他車の走行情報は送受信I/F32、信号処理部33を介して制御部36に出力される。
【0037】
制御部36は、他車の走行情報から他車の位置情報を取り出し、この位置情報とGPS40からの自車位置情報とを比較し、閾値以下であれば2つの車両は近接していると判断する。閾値は例えばメモリ37に予め記憶されているものとする。
【0038】
また、送受信アンテナ31は他車に搭載されたレーダ装置に関するレーダ装置情報も受信する。受信したレーダ装置情報は送受信I/F32を介して制御部36に出力される。
【0039】
制御部36は2つの車両が近接していると判断し、他車のレーダ装置情報を受信したとき電波送信停止命令を出力する。電波送信停止命令は、通信I/F35を介してレーダ装置10、20に出力される。
【0040】
電波送信停止命令は、レーダ装置10、20の通信I/F17を介して制御部18に出力される。制御部18はパルス発振回路11等を制御して、送信アンテナ13から電波が送信されないようにする。
【0041】
電波送信停止命令は、例えば、プリクラッシュシステム60やACC70を介してレーダ装置10、20に出力するようにしてもよい。電波送信停止中に、プリクラッシュシステム60やACC70を停止させるためである。
【0042】
尚、レーダ装置10、20からの電波の送信を停止させるタイミングは、レーダ装置情報を受信した時点で行われることが望ましい。
【0043】
上述の例では、自車に近接した他車からレーダ装置情報を受信したときに電波送信を停止させるようにした。次の例は、電波送信停止に条件を設け、条件を満たしたときに電波送信を停止させるようにした例である。
【0044】
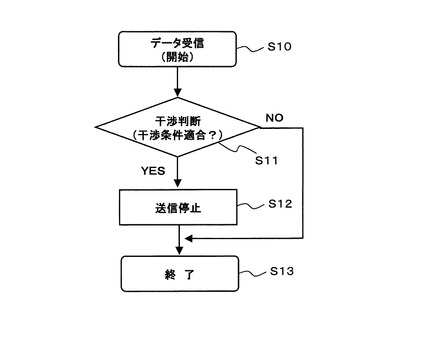
全体の構成は上述の例と同様である。図4は、通信装置30の制御部36で実行される電波送信停止処理の例を示すフローチャートである。
【0045】
まず、通信装置30は、他車の走行情報とレーダ装置情報とを受信することで処理が開始される(S10)。次いで、制御部36は条件に適合しているか否か判断する(S11)。干渉が発生しているか否かを判断している。
【0046】
条件は、例えば、他車に搭載されたレーダ装置の電波送信方向と自車に搭載されたレーダ装置10、20の電波送信方向とが重なると推測された場合である。かかる条件に適合したとき(S11でYES)、制御部36により送信停止命令が出力されレーダ装置10、20から電波送信が停止される(S12)。そして処理が終了する(S13)。
【0047】
電波送信方向が重なっていないと判断したとき(S11でNO)、送信停止を行うことなく処理が終了する(S13)。
【0048】
電波送信方向が重なるか否かは、例えば以下のようにして判断する。すなわち、制御部36は自車位置情報をGPS40から取得し、自車のレーダ装置情報をメモリ37或いはレーダ装置10、20から取得する。また、制御部36は取得した自車のレーダ装置情報からレーダ装置10、20の搭載位置情報(前方、後方等)を取り出す。
【0049】
そして、制御部36はナビゲーションシステム50から地図情報を取得し、地図上における自車位置と自車の電波送信方向の情報を得る。
【0050】
一方、通信装置30は他車の走行情報とレーダ装置情報とを受信しているので、走行情報から他車の位置情報、レーダ装置情報から他車の電波送信方向の情報を取得する。制御部36は自車の場合と同様に、これらの情報と取得した地図情報とから、地図上における他車の位置とその電波送信方向の情報を得る。
【0051】
そして、制御部36は地図上に自車と他車の位置及び電波送信方向の情報を得ているため、これらの情報に基づいて地図上で電波送信方向が重なるか否かを判断する。
【0052】
尚、送信される電波の幅もレーダ装置情報に含めて地図上に表現して判断基準にしてもよいし、メモリ37等に予めその幅を決めておき、本処理でその情報を取り出して地図上に表現して判断基準としてもよい。
【0053】
別の条件としては、他車に、電波の送信中心周波数と送信周波数帯域とが隣接したレーダ装置を搭載していた場合である。隣接していると判断したとき(S11でYES)、制御部36はレーダ装置10、20の電波送信を停止させ(S12)、処理を終了させる(S13)。隣接していないと判断したときは、送信停止を行うことなく処理を終了させる(S13)。
【0054】
レーダ装置情報には、上述したように、電波の送信中心周波数と送信周波数帯域の情報が含まれている。従って、制御部36は自車に関しては、メモリ37或いはレーダ装置10、20から自車のレーダ装置情報を取得し、自車の送信中心周波数と送信周波数帯域の情報を取り出す。
【0055】
一方、制御部36は他車のレーダ装置情報を送受信アンテナ31から取得しているため、この情報から他車の送信中心周波数と送信周波数帯域の情報を取り出す。
【0056】
制御部36は、これらの情報から自車と他車との送信中心周波数等が一致、或いは一定範囲内で重なっているか否かを判断することで、隣接しているか否かを判断することができる。
【0057】
この例の場合、送信中心周波数と送信周波数帯域のいずれか一方のみで条件を判断するようにしてもよい。
【0058】
更に、別の条件としては、レーダ装置10、20からの電波送信タイミングが重なってしまうと推測される場合である。制御部36は、送信タイミングが重なっていると判断したとき(S11でYES)、レーダ装置10、20から電波の送信を停止させ(S12)、処理を終了させる(S13)。一方、重なっていないと判断したときは(S11でNO)、そのまま処理を終了させる(S13)。
【0059】
電波送信タイミングは、レーダ装置情報に含まれる電波送信周期や送信開始時間の情報に基づいて判断する。自車と他車の電波送信周期や送信開始時間が一致、あるいは一定範囲内で重なっていたときに電波送信タイミングが重なっていると判断し、そうでないとき重なっていないと判断すればよい。
【0060】
更に、別の条件としては、自車と他車の過去一定時間内の高低差(海抜差)が同じとき、又は過去一定時間内の高低変化から同じ高低になると推測された場合である。
【0061】
例えば、自車と他車とが互いに追従走行をしている場合などである。先行している他車の後方用レーダ装置と、自車の前方用レーダ装置10とが(或いは、先行している自車の後方用レーダ装置20と他車の前方用レーダ装置とが)互いに干渉しないようにするためである。この場合、追従走行している自車のレーダ装置(或いは、先行している自車のレーダ装置)10、20の電波送信を停止させる。
【0062】
高低差が略同じ、又は略同じ高低になることが推測されたとき(S11でYES)、制御部36はレーダ装置10、20からの電波送信を停止させ(S12)、処理を終了させる(S13)。一方、そうでないとき(S11でNO)、送信停止させることなくそのまま処理を終了させる(S13)。
【0063】
走行情報には、上述したように高低(海抜)に関する情報が含まれる。自車の高低情報はGPS40とナビゲーションシステム50から取得でき、他車の高低情報は他車の走行情報として通信装置30で受信できる。これらの情報を一定時間比較することで、制御部36は本条件を判断できる。
【0064】
上述の各電波送信停止条件を判断する際、その判断結果を履歴としてメモリ37に記憶させるようにしてもよいし、制御部36の制御により通信I/F35を介してその判断結果を出力するようにしてもよい。メモリ37を所謂ダイアグ(干渉電波用ダイアグ)として機能させる。
【0065】
また、いずれの条件においてもその条件に適合して電波送信停止命令を出力する際に、プリクラッシュシステム60やACC70に停止命令を出力してプリクラッシュシステム60等を停止させるようにしてもよい。
【0066】
更に、上述した例では、いずれかの条件が適合したときに電波送信を停止させるようにしたが、これらの条件を組み合わせて判断の基準としてもよい。
【0067】
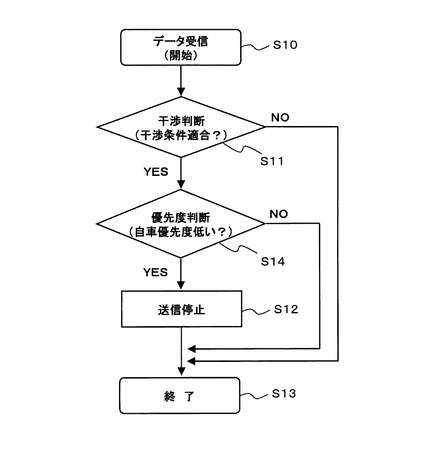
次の例は、自車と他車の走行情報及びレーダ装置情報に基づいて電波送信の優先度を判断し、自車の優先度が低いと判断したとき自車のレーダ装置10、20から電波の送信を停止させる例である。
【0068】
図5は本例における処理の例を示すフローチャートである。他車からの走行情報とレーダ装置情報を受信すると処理が開始され(S10)、制御部36は上述した図4の例と同様に干渉条件(送信電波停止条件)を判断する(S11)。
【0069】
条件に適合したとき(YES)、制御部36は優先度を判断する(S14)。自車の優先度が低いと判断したとき(YES)、制御部36はレーダ装置10、20からの送信電波を停止させる(S12)。そして、処理は終了する(S13)。
【0070】
一方、干渉条件に適合しないとき(S11でNO)や自車の優先度が高いとき(S12でNO)、送信停止を行うことなく処理を終了させる(S13)。
【0071】
優先度の算出は、例えば、追従走行を行っている車両の優先度を高くし、先行する車両の優先度を低くする。この場合、先行車両のレーダ装置10、20からの送信電波が停止する。
【0072】
追従走行を行っているか否かは、上述した電波送信停止条件の高低差(海抜)により判断可能である。或いは、自車と他車の位置情報と地図情報から判断可能である。更には、ACC70は自車が追従走行しているか否かの情報を有するため、その情報をACC70から取得することで判断可能である。
【0073】
他の優先度の算出方法は、自車と他車が共に追従走行をしている場合には、車間距離の小さい車両の優先度を高くし、車間距離の大きい車両の優先度を低くする。車間距離の小さい車両のレーダ装置10、20からの電波送信が停止される。
【0074】
車間距離の情報は、例えば、各車両に備えるGPS40から自車位置情報を取得し、通信装置30により互いに送受信を行うことで車間距離の情報を取得できる。そして、自車と他車とで取得した車間距離の情報を、通信装置30を介して送受信することで自車と他車とで車間距離の大きさを比較できる。
【0075】
更に他の優先度の算出方法は、レーダ装置10、20の搭載位置(前方、後方、側方など)により優先度を割り振っておく方法がある。レーダ装置情報には、レーダ装置10、20の搭載位置情報が含まれているため、通信装置30による送受信により他車の搭載位置情報が得られる。かかる情報から割り振られた優先度を比較することで、優先度に低い方のレーダ装置10、20からの送信電波を停止させればよい。
【0076】
優先度による場合でも、電波送信停止命令をプリクラッシュシステム60やACC70に出力してプリクラッシュシステム60等を停止させるようにしてもよい。また、優先度の算出も、これらを組み合わせて算出するようにしてもよい。
【0077】
次に上述したいずれの例でも適用できる他の例について説明する。
【0078】
レーダ装置10、20からの送信電波を停止しているとき、なぜ停止しているかをユーザに認識させるため、例えば「レーダ搭載車両接近中」などをディスプレイに表示するようにしてもよい。例えば、通信装置30の制御部36の制御により、電波送信停止命令を出力する際にナビゲーションシステム50に表示命令を出力し、ナビゲーションシステム50のディスプレイにかかる表示を行わせることができる。
【0079】
また、先行車追従中に電波送信を停止したときに、電波送信停止直前の自車速を維持するか電波送信停止直前の自車速から所定の速度まで減速処理を行わせるようにしてもよい。例えば、通信装置30の制御部36が電波送信停止命令を出力するときに、車速維持や減速などの命令をECU80、90、100(例えばエンジンECUなど)に出力し、車両の各ハードウェアを制御して速度の維持等を行えばよい。
【0080】
更に、上述したいずれの例においても電波送信を停止させるのではなく、干渉が発生すると推測される場合(例えば、最初の例では車両が近接した場合など)、干渉の生じない車線へと変更を促すようにしてもよい。方向指示器により、ユーザに車線変更、タイミング、方向を促すようにしたり、ブザーや音声等により知らせるようにしてもよい。例えば、通信装置30の制御部36が電波送信停止命令を出力するときに、メータECU80に指示命令を出力し、メータECU80の制御により車線変更方向にウィンカー81を表示させるようにすればよい。或いは、ブザーや音声指示器が接続されたECUにかかる指示命令を出力する。
【0081】
この車線変更に関しては、車内LANシステム1内で自動的に行わせるようにすることもできる。例えば、制御部36から電波送信停止命令を出力するときに、パワステECU100に操作命令を出力し、パワステECU100の制御によりステアリング101を操作する。
【0082】
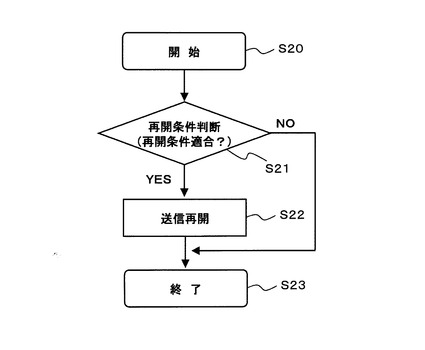
次に、電波送信停止中に電波送信再開条件が満たされたときに電波送信を再開させる例について説明する。図6は電波再開処理の例を示すフローチャートである。
【0083】
処理が開始されると(S20)、通信装置30の制御部36は電波送信再開条件に適合するか否か判断し(S21)、適合するとき(YES)電波送信を再開させ(S22)、処理を終了させる(S23)。一方、電波再開条件に適合しないとき(S21でNO)、そのまま処理を終了させる(S23)。
【0084】
電波送信の再開条件は以下の例が考えられる。
【0085】
即ち、通信装置30の制御部36によりレーダ搭載車両が自車両に近接していないことが認識された場合や、レーダ搭載車両と自車両の電波送信方向が異なることが認識された場合、自車両に搭載されたレーダ装置10、20と隣接した送信中心周波数と送信周波数帯域を有するレーダ装置を搭載した車両からレーダ装置情報や走行情報が受信されなくなった場合、自車両とレーダ搭載車両の夫々過去一定時間の高低(海抜)変化が異なった場合、などである。
【0086】
これらの具体例は、上述した電波送信を停止させる条件(図4のS11)と丁度逆の条件を満たしたときに相当する。そのため、詳細な処理もかかる条件における判断と同様の処理が行われる。
【0087】
再開条件に適合するとき、通信装置30の制御部36は電波送信再開命令をレーダ装置10、20に出力し、レーダ装置10、20の制御部18の制御により送信電波が送信される。
【0088】
尚、車両が複数存在するとき、それらすべての他車両に関して、電波送信再開条件が満たされたときに送信を再開させる。電波干渉を確実に防止するためである。
【0089】
過去の電波送信停止の履歴を示す干渉電波送信停止ダイアグ(例えば、メモリ37に記憶されている)は、電波送信停止中から電波送信が再開されると、該当するエントリをクリアする。
【0090】
更に、かかるダイアグには電波送信停止中から電波送信が再開された回数が記憶されその回数の大小により、上述した電波送信停止の条件にしてもよい。例えば、電波送信停止を多く行っている車両は安全性を高めるため電波送信を停止させず、カウント回数の少ない車両を優先的に電波送信を停止させる。
【0091】
いずれの場合も、電波送信が再開されたとき、制御部36によりプリクラッシュシステム60やACC70を動作させるようにしてもよい。制御部36から電波送信再開命令を出力するときに、プリクラッシュシステム60やACC70に再開命令を出力することでその動作が再開される。
【0092】
そして、レーダ装置10、20やプリクラッシュシステム60等が再開していることをブザー、音声で知らせたり、ディスプレイに表示させるようにすることもできる。電波送信停止の際と同様に誤動作防止のためである。制御部36の制御により、ナビゲーションシステム50等にその表示命令等を出力することで表示等が行われる。
【0093】
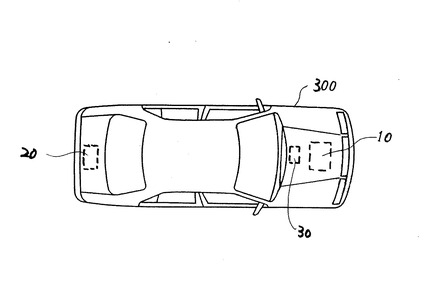
図7は、物体検出用レーダ装置10、20と通信装置30が車両300に搭載された例を示す図である。車両300の前方に前方用のレーダ装置10が搭載され、後方に後方用のレーダ装置20が搭載される。これらは互いに車内LAN110を介して接続される。図1に示す他の構成も車両100内に配置される。
【0094】
上述した例において、送信電波停止条件や送信電波再開条件の判断は通信装置30の制御部36で行われるとして説明した。これらの判断を、通信装置30の演算部34で行わせるようにしてもよい。判断結果を制御部36に出力し、その結果に基づいて電波送信停止命令等をレーダ装置10、20等に出力することで上述した例と同様に実施可能で、同様の作用効果を奏する。
【0095】
また、これらの条件の判断をレーダ装置10、20の制御部18で行わせるようにしてもよい。通信装置30で受信した他車の走行情報やレーダ装置情報を制御部18に出力して、制御部18にて判断を行わせることで同様に実施可能で同様の作用効果を奏する。
【0096】
更に、レーダ装置10、20内に別途演算部を設け、この演算部にて判断を行わせるようにしてもよい。この場合でも同様の作用効果を奏する。
【図面の簡単な説明】
【0097】
【図1】車内LANネットワークシステム1の構成例を示す図である。
【図2】レーダ装置の構成例を示す図である。
【図3】通信装置の構成例を示す図である。
【図4】電波送信停止処理の例を示すフローチャートである。
【図5】電波送信停止処理の例を示すフローチャートである。
【図6】電波送信再開処理の例を示すフローチャートである。
【図7】レーダ装置と通信装置が搭載された車両の例を示す図である。
【符号の説明】
【0098】
1 車内LANネットワークシステム、 10 前方物体検出用レーダ装置、 11 パルス発振回路、 13 送信アンテナ、 14 受信アンテナ、 16 信号処理部、 17 通信インターフェース(I/F)、 18 制御部、 20 後方用物体検出用レーダ装置、 31 送受信アンテナ、 33 信号処理部、 35 通信I/F、 36 制御部、 40 GPS、 50 ナビゲーションシステム、 60 プリクラッシュシステム、 70 定速走行装置(ACC)、 80 メータECU(Electric Control Unit)、 90 制御ECU、 100 パワーステアリング(パワステ)ECU、 200 レーダシステム
【技術分野】
【0001】
本発明は、レーダ装置、及び干渉防止方法に関する。詳しくは、電波干渉を十分軽減するようにしたレーダ装置等に関する。
【背景技術】
【0002】
一般に車載用に搭載されたレーダ装置は、目標物からの反射波を受信することで目標物の距離や速度等を検出する。かかるレーダ装置は、同じ周波数帯を使用する他の車載用レーダ装置からの送信波を受信する場合もあり、目標物の反射波として誤検出してしまい、所謂干渉と呼ばれる現象が発生する。
【0003】
干渉の問題に対して、移動体通信の分野では予め周波数帯域や送信周期を割り付けて干渉の発生を抑え、干渉が発生したとき別の帯域等に割り付けを行うことで干渉を防止する方法が知られている。
【0004】
しかし、車載用のレーダ装置では使用できる周波数帯域が限られており、数多くのレーダ装置が近接すると割り付けの数が足りなくなってしまい、干渉の問題は避けることができない。
【0005】
かかる問題に対して従来では、VICS(道路交通情報通信システム)情報を基にして、自車両が上り方向か下り方向かを判断し、送信する電波を水平偏波か垂直偏波かに切替えて対向する車両のレーダ装置間での干渉を防止するようにしたレーダ装置が開示されている(例えば、以下の特許文献1)。
【特許文献1】特開平11−248837号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のように、送信電波の偏波角をずらしたとしても、上り方向と下り方向とで車両が互いに近接したとき、必ずしも干渉の発生を防止できるわけではなく、少なからず干渉が発生する。従って、このようなレーダ装置では、目標物を誤検出する可能性がある。
【0007】
そこで、本発明は上記問題点に鑑みてなされたもので、その目的は、電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の一実施態様によれば、レーダ装置において、他車と通信を行う通信手段と、前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、目標物を検出するための送信電波の送信を停止させる制御手段とを備えることを特徴とする。
【0009】
また、本発明の他の実施態様によれば、前記レーダ装置において、前記電波送信停止条件を満たすときとは、自車が他車に近接したとき、又は自車と他車の電波送信方向が重なっているとき、又は自車と他車の前記送信電波の送信中心周波数と送信周波数帯域とが重なっているとき、又は自車と他車の過去一定時間の高低差が所定以内であるとき、又は自車と他車の過去一定時間の高低変化から所定以内の高低差になるとき、又はこれらの条件のうち複数の条件に適合するとき、であることを特徴とする。
【0010】
更に、本発明の他の実施態様によれば、前記レーダ装置において、前記制御手段は、前記電波送信停止条件を満たすときに自車と他車との優先度を判断し、前記自車の前記優先度が低いと判断したとき前記送信電波の送信を停止させることを特徴とする。
【0011】
更に、本発明の他の実施態様によれば、前記レーダ装置において、前記制御手段は、前記送信電波の送信を停止した後、送信電波再開条件を満たすとき前記送信電波の送信を再開させることを特徴とする。
【0012】
また、上記目的を達成するために本発明の他の実施態様によれば、他車と通信するための通信手段を備え、目標物に対して送信電波を送信しその反射波を受信することで前記目標物を検出するレーダ装置における干渉防止方法において、前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、前記送信電波の送信を停止させることを特徴とする。
【発明の効果】
【0013】
本発明によれば、電波干渉を十分軽減したレーダ装置、及び干渉防止方法を提供することができる。
【発明を実施するための最良の形態】
【0014】
本発明を実施するための最良の形態について以下図面を参照しながら説明する。図1は、物体検出用レーダ装置10、20と通信装置30が車内LANネットワークシステム1に接続された例を示す図である。
【0015】
車内LANネットワークシステム1は、人工衛星等を介して車両の位置情報を取得するGPS(Global Positioning System)40と、地図情報を有しモニタに現在の車両位置等を表示するナビゲーションシステム50と、車両の衝突を軽減するプリクラッシュシステム60と、レーダ装置10、20からの検出結果に基づいて他車両との車間距離を一定に保つよう車両を制御する定速走行装置(ACC:Adaptive Cruise Control)70と、車両内の種々のハードウェアを制御する種々のECU(Electric Control Unit)80、90、100、及びレーダシステム200を備える。これらは、車内LAN110を介して互いに接続される。
【0016】
図1の例では、車内LANネットワークシステム1として、「CAN」(Controller Area Network)と呼ばれるシリアル通信プロトコルでデータの送受信が行われる。CANはISO(International Organization for Standardization)で標準化されたプロトコルで、マルチマスタ方式等の特徴がある。
【0017】
また、図1ではECUの例として、メータECU80と、制御ECU90と、パワーステアリング(パワステ)ECU100を示している。メータECU80には、ウィンカー81が接続され、制御ECU90には速度センサ91が接続され、パワステECU100にはステアリング101が接続される。車内LAN110には、それ以外のエンジン系のECUや情報系のECUが接続されてもよい。
【0018】
レーダシステム200は、電波を送受信して車両前方の物体を検出するための前方物体検出用レーダ装置10と、同じく電波の送受信により車両後方の物体を検出するための後方物体検出用レーダ装置20と、車両間との通信や路側に設置された装置と通信するための通信装置30を備える。
【0019】
図2は、両レーダ装置10、20の構成例を示す図である。双方のレーダ装置10、20とも同じ構成である。
【0020】
レーダ装置10、20は、パルス発振回路11と、アンプ12と、送信アンテナ13と、受信アンテナ14と、ミキサ15と、信号処理部16と、通信インターフェース(I/F)17、及び制御部18を備える。
【0021】
パルス発振回路11は所定周波数の送信信号(例えば高周波信号)を生成する。アンプ12は送信信号を増幅し、送信アンテナ13は増幅された送信信号に基づいて送信電波を送信する。
【0022】
受信アンテナ14は送信電波の物体に対する反射波を受信する。ミキサ15は、受信アンテナ14からの受信信号とパルス発振回路11からの送信信号とをミキシングする。
【0023】
信号処理部16は、ミキシングされた受信信号に基づいて、物体の距離、速度等の検出の処理を行う。検出結果の情報は、通信I/F17から車内LAN110に出力される。
【0024】
また、制御部18は、パルス発振回路11や信号処理部16、通信I/F17を制御する。詳細は後述する。
【0025】
図3は通信装置30の構成例を示す図である。通信装置30は、送受信アンテナ31と、送受信I/F32と、信号処理部33と、演算部34と、通信I/F35と、制御部36、及びメモリ37を備える。
【0026】
送受信アンテナ31は他の車両等と通信を行うためのアンテナである。送受信I/F32は、送受信アンテナ31と信号処理部33とのインターフェースである。例えば、送受信アンテナ31で受信した受信電波を信号処理部33で処理できるデータに変換する。
【0027】
信号処理部33は、送受信I/F32からのデータに基づいて、他車に関する情報を得るための種々の信号処理を行う。
【0028】
演算部34は、信号処理部33で得られた情報や、通信I/F35を介して車内LAN110に接続されたECU80、90、100等からの情報に基づいて種々の演算を行う。
【0029】
制御部36は、送受信I/F32と、信号処理部33、通信I/F35に対する制御を行う。詳細は後述する。また、制御部36にはメモリ37が接続される。メモリ37には、自通信装置30に関する情報が記憶される。
【0030】
次に、レーダ装置10、20と通信装置30を含むレーダシステム200の動作について説明する。本実施例において通信装置30は、GPS40やナビゲーションシステム50を基に走行情報を他の車両の通信装置に送信する。また、通信装置30は自車に搭載されるレーダ装置10、20に関するレーダ装置情報も送信する。
【0031】
走行情報とは、例えば、自車位置や速度、高低(海抜)、進行方向(東西南北)などの情報である。
【0032】
また、レーダ装置情報とは、例えば、レーダ装置が搭載された搭載位置(前方、後方、側方など)、レーダ装置が遠距離用のものか近距離用のものか、現在電波を送信しているか停止しているかの稼動状態、電波送信中心周波数や電波送信周波数帯域、電波送信周期、電波送信開始時間等の情報である。自車両のレーダ装置情報は、通信装置30のメモリ37に記憶されてもよいし、レーダ装置10、20の制御部18内のメモリ等に記憶されてもよい。
【0033】
一方、通信装置30は他の車両の通信装置から走行情報や他の車両に搭載されたレーダ装置情報も受信する。
【0034】
そして、通信装置30は、他の車両からの走行情報等に基づいて、近接した他の車両からレーダ装置情報を受信したときに、レーダ装置10、20に対して電波送信命令を出力し、レーダ装置10、20からの電波の送信を停止させる。自車両の電波送信を停止させることで、車両間での電波干渉が十分低減させる、或いは干渉を発生させないようにすることができる。
【0035】
詳細に説明する。まず、GPS40から自車位置の情報が通信装置30に出力される。自車位置情報は通信装置30の通信I/F35、演算部34を介して制御部36に出力される。
【0036】
一方、通信装置30の送受信アンテナ31は他車の走行情報を受信する。他車の走行情報は送受信I/F32、信号処理部33を介して制御部36に出力される。
【0037】
制御部36は、他車の走行情報から他車の位置情報を取り出し、この位置情報とGPS40からの自車位置情報とを比較し、閾値以下であれば2つの車両は近接していると判断する。閾値は例えばメモリ37に予め記憶されているものとする。
【0038】
また、送受信アンテナ31は他車に搭載されたレーダ装置に関するレーダ装置情報も受信する。受信したレーダ装置情報は送受信I/F32を介して制御部36に出力される。
【0039】
制御部36は2つの車両が近接していると判断し、他車のレーダ装置情報を受信したとき電波送信停止命令を出力する。電波送信停止命令は、通信I/F35を介してレーダ装置10、20に出力される。
【0040】
電波送信停止命令は、レーダ装置10、20の通信I/F17を介して制御部18に出力される。制御部18はパルス発振回路11等を制御して、送信アンテナ13から電波が送信されないようにする。
【0041】
電波送信停止命令は、例えば、プリクラッシュシステム60やACC70を介してレーダ装置10、20に出力するようにしてもよい。電波送信停止中に、プリクラッシュシステム60やACC70を停止させるためである。
【0042】
尚、レーダ装置10、20からの電波の送信を停止させるタイミングは、レーダ装置情報を受信した時点で行われることが望ましい。
【0043】
上述の例では、自車に近接した他車からレーダ装置情報を受信したときに電波送信を停止させるようにした。次の例は、電波送信停止に条件を設け、条件を満たしたときに電波送信を停止させるようにした例である。
【0044】
全体の構成は上述の例と同様である。図4は、通信装置30の制御部36で実行される電波送信停止処理の例を示すフローチャートである。
【0045】
まず、通信装置30は、他車の走行情報とレーダ装置情報とを受信することで処理が開始される(S10)。次いで、制御部36は条件に適合しているか否か判断する(S11)。干渉が発生しているか否かを判断している。
【0046】
条件は、例えば、他車に搭載されたレーダ装置の電波送信方向と自車に搭載されたレーダ装置10、20の電波送信方向とが重なると推測された場合である。かかる条件に適合したとき(S11でYES)、制御部36により送信停止命令が出力されレーダ装置10、20から電波送信が停止される(S12)。そして処理が終了する(S13)。
【0047】
電波送信方向が重なっていないと判断したとき(S11でNO)、送信停止を行うことなく処理が終了する(S13)。
【0048】
電波送信方向が重なるか否かは、例えば以下のようにして判断する。すなわち、制御部36は自車位置情報をGPS40から取得し、自車のレーダ装置情報をメモリ37或いはレーダ装置10、20から取得する。また、制御部36は取得した自車のレーダ装置情報からレーダ装置10、20の搭載位置情報(前方、後方等)を取り出す。
【0049】
そして、制御部36はナビゲーションシステム50から地図情報を取得し、地図上における自車位置と自車の電波送信方向の情報を得る。
【0050】
一方、通信装置30は他車の走行情報とレーダ装置情報とを受信しているので、走行情報から他車の位置情報、レーダ装置情報から他車の電波送信方向の情報を取得する。制御部36は自車の場合と同様に、これらの情報と取得した地図情報とから、地図上における他車の位置とその電波送信方向の情報を得る。
【0051】
そして、制御部36は地図上に自車と他車の位置及び電波送信方向の情報を得ているため、これらの情報に基づいて地図上で電波送信方向が重なるか否かを判断する。
【0052】
尚、送信される電波の幅もレーダ装置情報に含めて地図上に表現して判断基準にしてもよいし、メモリ37等に予めその幅を決めておき、本処理でその情報を取り出して地図上に表現して判断基準としてもよい。
【0053】
別の条件としては、他車に、電波の送信中心周波数と送信周波数帯域とが隣接したレーダ装置を搭載していた場合である。隣接していると判断したとき(S11でYES)、制御部36はレーダ装置10、20の電波送信を停止させ(S12)、処理を終了させる(S13)。隣接していないと判断したときは、送信停止を行うことなく処理を終了させる(S13)。
【0054】
レーダ装置情報には、上述したように、電波の送信中心周波数と送信周波数帯域の情報が含まれている。従って、制御部36は自車に関しては、メモリ37或いはレーダ装置10、20から自車のレーダ装置情報を取得し、自車の送信中心周波数と送信周波数帯域の情報を取り出す。
【0055】
一方、制御部36は他車のレーダ装置情報を送受信アンテナ31から取得しているため、この情報から他車の送信中心周波数と送信周波数帯域の情報を取り出す。
【0056】
制御部36は、これらの情報から自車と他車との送信中心周波数等が一致、或いは一定範囲内で重なっているか否かを判断することで、隣接しているか否かを判断することができる。
【0057】
この例の場合、送信中心周波数と送信周波数帯域のいずれか一方のみで条件を判断するようにしてもよい。
【0058】
更に、別の条件としては、レーダ装置10、20からの電波送信タイミングが重なってしまうと推測される場合である。制御部36は、送信タイミングが重なっていると判断したとき(S11でYES)、レーダ装置10、20から電波の送信を停止させ(S12)、処理を終了させる(S13)。一方、重なっていないと判断したときは(S11でNO)、そのまま処理を終了させる(S13)。
【0059】
電波送信タイミングは、レーダ装置情報に含まれる電波送信周期や送信開始時間の情報に基づいて判断する。自車と他車の電波送信周期や送信開始時間が一致、あるいは一定範囲内で重なっていたときに電波送信タイミングが重なっていると判断し、そうでないとき重なっていないと判断すればよい。
【0060】
更に、別の条件としては、自車と他車の過去一定時間内の高低差(海抜差)が同じとき、又は過去一定時間内の高低変化から同じ高低になると推測された場合である。
【0061】
例えば、自車と他車とが互いに追従走行をしている場合などである。先行している他車の後方用レーダ装置と、自車の前方用レーダ装置10とが(或いは、先行している自車の後方用レーダ装置20と他車の前方用レーダ装置とが)互いに干渉しないようにするためである。この場合、追従走行している自車のレーダ装置(或いは、先行している自車のレーダ装置)10、20の電波送信を停止させる。
【0062】
高低差が略同じ、又は略同じ高低になることが推測されたとき(S11でYES)、制御部36はレーダ装置10、20からの電波送信を停止させ(S12)、処理を終了させる(S13)。一方、そうでないとき(S11でNO)、送信停止させることなくそのまま処理を終了させる(S13)。
【0063】
走行情報には、上述したように高低(海抜)に関する情報が含まれる。自車の高低情報はGPS40とナビゲーションシステム50から取得でき、他車の高低情報は他車の走行情報として通信装置30で受信できる。これらの情報を一定時間比較することで、制御部36は本条件を判断できる。
【0064】
上述の各電波送信停止条件を判断する際、その判断結果を履歴としてメモリ37に記憶させるようにしてもよいし、制御部36の制御により通信I/F35を介してその判断結果を出力するようにしてもよい。メモリ37を所謂ダイアグ(干渉電波用ダイアグ)として機能させる。
【0065】
また、いずれの条件においてもその条件に適合して電波送信停止命令を出力する際に、プリクラッシュシステム60やACC70に停止命令を出力してプリクラッシュシステム60等を停止させるようにしてもよい。
【0066】
更に、上述した例では、いずれかの条件が適合したときに電波送信を停止させるようにしたが、これらの条件を組み合わせて判断の基準としてもよい。
【0067】
次の例は、自車と他車の走行情報及びレーダ装置情報に基づいて電波送信の優先度を判断し、自車の優先度が低いと判断したとき自車のレーダ装置10、20から電波の送信を停止させる例である。
【0068】
図5は本例における処理の例を示すフローチャートである。他車からの走行情報とレーダ装置情報を受信すると処理が開始され(S10)、制御部36は上述した図4の例と同様に干渉条件(送信電波停止条件)を判断する(S11)。
【0069】
条件に適合したとき(YES)、制御部36は優先度を判断する(S14)。自車の優先度が低いと判断したとき(YES)、制御部36はレーダ装置10、20からの送信電波を停止させる(S12)。そして、処理は終了する(S13)。
【0070】
一方、干渉条件に適合しないとき(S11でNO)や自車の優先度が高いとき(S12でNO)、送信停止を行うことなく処理を終了させる(S13)。
【0071】
優先度の算出は、例えば、追従走行を行っている車両の優先度を高くし、先行する車両の優先度を低くする。この場合、先行車両のレーダ装置10、20からの送信電波が停止する。
【0072】
追従走行を行っているか否かは、上述した電波送信停止条件の高低差(海抜)により判断可能である。或いは、自車と他車の位置情報と地図情報から判断可能である。更には、ACC70は自車が追従走行しているか否かの情報を有するため、その情報をACC70から取得することで判断可能である。
【0073】
他の優先度の算出方法は、自車と他車が共に追従走行をしている場合には、車間距離の小さい車両の優先度を高くし、車間距離の大きい車両の優先度を低くする。車間距離の小さい車両のレーダ装置10、20からの電波送信が停止される。
【0074】
車間距離の情報は、例えば、各車両に備えるGPS40から自車位置情報を取得し、通信装置30により互いに送受信を行うことで車間距離の情報を取得できる。そして、自車と他車とで取得した車間距離の情報を、通信装置30を介して送受信することで自車と他車とで車間距離の大きさを比較できる。
【0075】
更に他の優先度の算出方法は、レーダ装置10、20の搭載位置(前方、後方、側方など)により優先度を割り振っておく方法がある。レーダ装置情報には、レーダ装置10、20の搭載位置情報が含まれているため、通信装置30による送受信により他車の搭載位置情報が得られる。かかる情報から割り振られた優先度を比較することで、優先度に低い方のレーダ装置10、20からの送信電波を停止させればよい。
【0076】
優先度による場合でも、電波送信停止命令をプリクラッシュシステム60やACC70に出力してプリクラッシュシステム60等を停止させるようにしてもよい。また、優先度の算出も、これらを組み合わせて算出するようにしてもよい。
【0077】
次に上述したいずれの例でも適用できる他の例について説明する。
【0078】
レーダ装置10、20からの送信電波を停止しているとき、なぜ停止しているかをユーザに認識させるため、例えば「レーダ搭載車両接近中」などをディスプレイに表示するようにしてもよい。例えば、通信装置30の制御部36の制御により、電波送信停止命令を出力する際にナビゲーションシステム50に表示命令を出力し、ナビゲーションシステム50のディスプレイにかかる表示を行わせることができる。
【0079】
また、先行車追従中に電波送信を停止したときに、電波送信停止直前の自車速を維持するか電波送信停止直前の自車速から所定の速度まで減速処理を行わせるようにしてもよい。例えば、通信装置30の制御部36が電波送信停止命令を出力するときに、車速維持や減速などの命令をECU80、90、100(例えばエンジンECUなど)に出力し、車両の各ハードウェアを制御して速度の維持等を行えばよい。
【0080】
更に、上述したいずれの例においても電波送信を停止させるのではなく、干渉が発生すると推測される場合(例えば、最初の例では車両が近接した場合など)、干渉の生じない車線へと変更を促すようにしてもよい。方向指示器により、ユーザに車線変更、タイミング、方向を促すようにしたり、ブザーや音声等により知らせるようにしてもよい。例えば、通信装置30の制御部36が電波送信停止命令を出力するときに、メータECU80に指示命令を出力し、メータECU80の制御により車線変更方向にウィンカー81を表示させるようにすればよい。或いは、ブザーや音声指示器が接続されたECUにかかる指示命令を出力する。
【0081】
この車線変更に関しては、車内LANシステム1内で自動的に行わせるようにすることもできる。例えば、制御部36から電波送信停止命令を出力するときに、パワステECU100に操作命令を出力し、パワステECU100の制御によりステアリング101を操作する。
【0082】
次に、電波送信停止中に電波送信再開条件が満たされたときに電波送信を再開させる例について説明する。図6は電波再開処理の例を示すフローチャートである。
【0083】
処理が開始されると(S20)、通信装置30の制御部36は電波送信再開条件に適合するか否か判断し(S21)、適合するとき(YES)電波送信を再開させ(S22)、処理を終了させる(S23)。一方、電波再開条件に適合しないとき(S21でNO)、そのまま処理を終了させる(S23)。
【0084】
電波送信の再開条件は以下の例が考えられる。
【0085】
即ち、通信装置30の制御部36によりレーダ搭載車両が自車両に近接していないことが認識された場合や、レーダ搭載車両と自車両の電波送信方向が異なることが認識された場合、自車両に搭載されたレーダ装置10、20と隣接した送信中心周波数と送信周波数帯域を有するレーダ装置を搭載した車両からレーダ装置情報や走行情報が受信されなくなった場合、自車両とレーダ搭載車両の夫々過去一定時間の高低(海抜)変化が異なった場合、などである。
【0086】
これらの具体例は、上述した電波送信を停止させる条件(図4のS11)と丁度逆の条件を満たしたときに相当する。そのため、詳細な処理もかかる条件における判断と同様の処理が行われる。
【0087】
再開条件に適合するとき、通信装置30の制御部36は電波送信再開命令をレーダ装置10、20に出力し、レーダ装置10、20の制御部18の制御により送信電波が送信される。
【0088】
尚、車両が複数存在するとき、それらすべての他車両に関して、電波送信再開条件が満たされたときに送信を再開させる。電波干渉を確実に防止するためである。
【0089】
過去の電波送信停止の履歴を示す干渉電波送信停止ダイアグ(例えば、メモリ37に記憶されている)は、電波送信停止中から電波送信が再開されると、該当するエントリをクリアする。
【0090】
更に、かかるダイアグには電波送信停止中から電波送信が再開された回数が記憶されその回数の大小により、上述した電波送信停止の条件にしてもよい。例えば、電波送信停止を多く行っている車両は安全性を高めるため電波送信を停止させず、カウント回数の少ない車両を優先的に電波送信を停止させる。
【0091】
いずれの場合も、電波送信が再開されたとき、制御部36によりプリクラッシュシステム60やACC70を動作させるようにしてもよい。制御部36から電波送信再開命令を出力するときに、プリクラッシュシステム60やACC70に再開命令を出力することでその動作が再開される。
【0092】
そして、レーダ装置10、20やプリクラッシュシステム60等が再開していることをブザー、音声で知らせたり、ディスプレイに表示させるようにすることもできる。電波送信停止の際と同様に誤動作防止のためである。制御部36の制御により、ナビゲーションシステム50等にその表示命令等を出力することで表示等が行われる。
【0093】
図7は、物体検出用レーダ装置10、20と通信装置30が車両300に搭載された例を示す図である。車両300の前方に前方用のレーダ装置10が搭載され、後方に後方用のレーダ装置20が搭載される。これらは互いに車内LAN110を介して接続される。図1に示す他の構成も車両100内に配置される。
【0094】
上述した例において、送信電波停止条件や送信電波再開条件の判断は通信装置30の制御部36で行われるとして説明した。これらの判断を、通信装置30の演算部34で行わせるようにしてもよい。判断結果を制御部36に出力し、その結果に基づいて電波送信停止命令等をレーダ装置10、20等に出力することで上述した例と同様に実施可能で、同様の作用効果を奏する。
【0095】
また、これらの条件の判断をレーダ装置10、20の制御部18で行わせるようにしてもよい。通信装置30で受信した他車の走行情報やレーダ装置情報を制御部18に出力して、制御部18にて判断を行わせることで同様に実施可能で同様の作用効果を奏する。
【0096】
更に、レーダ装置10、20内に別途演算部を設け、この演算部にて判断を行わせるようにしてもよい。この場合でも同様の作用効果を奏する。
【図面の簡単な説明】
【0097】
【図1】車内LANネットワークシステム1の構成例を示す図である。
【図2】レーダ装置の構成例を示す図である。
【図3】通信装置の構成例を示す図である。
【図4】電波送信停止処理の例を示すフローチャートである。
【図5】電波送信停止処理の例を示すフローチャートである。
【図6】電波送信再開処理の例を示すフローチャートである。
【図7】レーダ装置と通信装置が搭載された車両の例を示す図である。
【符号の説明】
【0098】
1 車内LANネットワークシステム、 10 前方物体検出用レーダ装置、 11 パルス発振回路、 13 送信アンテナ、 14 受信アンテナ、 16 信号処理部、 17 通信インターフェース(I/F)、 18 制御部、 20 後方用物体検出用レーダ装置、 31 送受信アンテナ、 33 信号処理部、 35 通信I/F、 36 制御部、 40 GPS、 50 ナビゲーションシステム、 60 プリクラッシュシステム、 70 定速走行装置(ACC)、 80 メータECU(Electric Control Unit)、 90 制御ECU、 100 パワーステアリング(パワステ)ECU、 200 レーダシステム
【特許請求の範囲】
【請求項1】
他車と通信を行う通信手段と、
前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、目標物を検出するための送信電波の送信を停止させる制御手段と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記電波送信停止条件を満たすときとは、自車が他車に近接したとき、又は自車と他車の電波送信方向が重なっているとき、又は自車と他車の前記送信電波の送信中心周波数と送信周波数帯域とが重なっているとき、又は自車と他車の過去一定時間の高低差が所定以内であるとき、又は自車と他車の過去一定時間の高低変化から所定以内の高低差になるとき、又はこれらの条件のうち複数の条件に適合するとき、であることを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記制御手段は、前記電波送信停止条件を満たすときに自車と他車との優先度を判断し、前記自車の前記優先度が低いと判断したとき前記送信電波の送信を停止させることを特徴とする請求項1記載のレーダ装置。
【請求項4】
前記制御手段は、前記送信電波の送信を停止した後、送信電波再開条件を満たすとき前記送信電波の送信を再開させることを特徴とする請求項1記載のレーダ装置。
【請求項5】
他車と通信するための通信手段を備え、目標物に対して送信電波を送信しその反射波を受信することで前記目標物を検出するレーダ装置における干渉防止方法において、
前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、前記送信電波の送信を停止させる、
ことを特徴とする干渉防止方法。
【請求項1】
他車と通信を行う通信手段と、
前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、目標物を検出するための送信電波の送信を停止させる制御手段と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記電波送信停止条件を満たすときとは、自車が他車に近接したとき、又は自車と他車の電波送信方向が重なっているとき、又は自車と他車の前記送信電波の送信中心周波数と送信周波数帯域とが重なっているとき、又は自車と他車の過去一定時間の高低差が所定以内であるとき、又は自車と他車の過去一定時間の高低変化から所定以内の高低差になるとき、又はこれらの条件のうち複数の条件に適合するとき、であることを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記制御手段は、前記電波送信停止条件を満たすときに自車と他車との優先度を判断し、前記自車の前記優先度が低いと判断したとき前記送信電波の送信を停止させることを特徴とする請求項1記載のレーダ装置。
【請求項4】
前記制御手段は、前記送信電波の送信を停止した後、送信電波再開条件を満たすとき前記送信電波の送信を再開させることを特徴とする請求項1記載のレーダ装置。
【請求項5】
他車と通信するための通信手段を備え、目標物に対して送信電波を送信しその反射波を受信することで前記目標物を検出するレーダ装置における干渉防止方法において、
前記通信手段により受信した他車に搭載されたレーダ装置に関するレーダ装置情報に基づいて電波送信停止条件を満たすとき、前記送信電波の送信を停止させる、
ことを特徴とする干渉防止方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−275400(P2008−275400A)
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願番号】特願2007−117825(P2007−117825)
【出願日】平成19年4月27日(2007.4.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成20年11月13日(2008.11.13)
【国際特許分類】
【出願日】平成19年4月27日(2007.4.27)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]