
レーダ装置、物標速度検出方法、及び、物標速度検出プログラム
【課題】不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【解決手段】船舶用レーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。信号発生部は、送信パルス信号を発生させる。送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、物標の相対速度を検出可能なレーダ装置に関する。
【背景技術】
【0002】
従来から、回転するアンテナによってマイクロ波(送信信号)の送信を行うとともに、物標からの反射波(受信信号)を受信して、当該物標の位置を検出可能なレーダ装置が知られている。
【0003】
また、この種のレーダ装置においては、送信信号の周波数と受信信号の周波数の差(ドップラー周波数)に基づいて、自船に対する物標の相対速度を検出可能な構成が知られている。このドップラー周波数を求めるためには、信号の位相を精度良く検出する必要がある。特許文献1が開示するレーダ装置は、信号の位相を精度良く検出するために、コヒーレント信号処理を行っている。
【0004】
特許文献1のレーダ装置は、送信信号の波形情報を取り込んで記憶可能に構成されている。そして、送信信号及び受信信号に対して適宜の処理をした後に、送信信号と受信信号の関連性に基づいて処理を行っている。この処理結果に高速フーリエ変換(FFT)を施すことで、信号の精度を向上させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−132926号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1のレーダ装置を用いて物標の相対速度を検出すると、検出された相対速度に不定性が生じる。この不定性は、検出された相対速度が一定値(検出限界速度)以上のときに現れるため、想定される物標の相対速度が検出限界速度以上である場合には、正しい相対速度を検出することができない。
【0007】
この検出限界速度を上げるためには、送信管の送信繰返し周波数を高くする必要がある。しかし、送信管には送信繰返し周波数の上限値が定められており、この上限値を超えてしまうと送信管が破損してしまうことがある。そのため、検出限界速度を上昇させることが困難であり、改善が望まれていた。
【0008】
本発明は以上の事情に鑑みてされたものであり、その目的は、不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の第1の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。前記信号発生部は、送信パルス信号を発生させる。前記送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理部は、前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。前記速度検出部は、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0011】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0012】
前記のレーダ装置において、前記速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出することが好ましい。
【0013】
これにより、離散的なデータである相関処理結果を効率的に扱うことができる。また、高速フーリエ変換(FFT)を用いることで演算量を低減させることができる。
【0014】
前記のレーダ装置においては、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部を備えることが好ましい。
【0015】
これにより、1つのパルス信号の送受信に基づいて得られる値と比べて、信号値を増幅しつつノイズを同程度に抑えることができる。従って、物標の速度を精度良く検出することができるとともに、反射断面積の小さなターゲットであっても容易に検出することが可能になる。
【0016】
前記のレーダ装置において、前記パルス積分部は、前記送信パルス信号の送信間隔中に物標の相対位置が変化することから前記受信信号に生じる位相差を考慮して、パルス信号毎に積分することが好ましい。
【0017】
これにより、上記の位相差の影響を抑えることができるので、送信間隔を長くせざるを得ない信号発生部を用いる場合においても、受信信号のS/N比を大きくすることができるとともに、物標の速度を精度良く検出することができる。
【0018】
前記のレーダ装置において、前記送信パルス信号の送信間隔は、前記信号発生部の送信間隔の下限値よりも大きいことが好ましい。
【0019】
これにより、送信パルス信号の送信間隔が「下限値+α」(ただし、αは下限値より小さい時間とする)となり、αの分だけ送信間隔がズレるため、見かけの送信繰返し周波数が信号発生部の送信繰返し周波数の上限値より高くなる。従って、物標の速度の検出限界速度を上昇させることができる。
【0020】
前記のレーダ装置においては、前記信号発生部は、マグネトロンを用いて送信パルス信号を発生させることが好ましい。
【0021】
即ち、マグネトロンは送信繰返し周波数の上限値が低いため、通常の構成では、相対速度が遅い物標の速度しか検出することができない。しかし、上記の構成を用いることで、検出限界速度を上昇させて、相対速度が速い物標の速度を検出することができる。
【0022】
前記のレーダ装置は、船舶に搭載されることが好ましい。
【0023】
即ち、検出された他の船舶の速度に不定性があると、近づいて来る船舶を遠ざかっていると判断してしまうことがある。このように、船舶用のレーダ装置は不定性が生じたときの影響が大きいため、本発明を船舶用のレーダ装置に適用することで、不定性を軽減するという効果を一層有効に発揮させることができる。
【0024】
本発明の第2の観点によれば、以下の物標速度検出方法が提供される。即ち、この物標速度検出方法は、信号発生工程と、送信タイミング制御工程と、相関処理工程と、速度検出工程と、を含む。前記信号発生工程は、送信パルス信号を発生させる。前記送信タイミング制御工程は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理工程は、前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。前記速度検出工程は、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0025】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0026】
本発明の第3の観点によれば、送信パルス信号を送信し、物標で反射した送信パルス信号を受信信号として受信し、演算部によって当該物標の速度を算出する構成のレーダ装置において、以下の物標速度検出プログラムが提供される。即ち、この物標速度検出プログラムは、送信タイミング制御ステップと、相関処理ステップと、速度検出ステップと、を含む処理を演算部に実行させる。前記送信タイミング制御ステップは、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理ステップは、前記送信パルス信号の波形と、受信信号の波形と、の相関処理を行う。前記速度検出ステップは、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0027】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態に係る船舶用レーダ装置の全体的な構成を示すブロック図。
【図2】演算部の構成を示すブロック図。
【図3】不等間隔送信を模式的に説明する図。
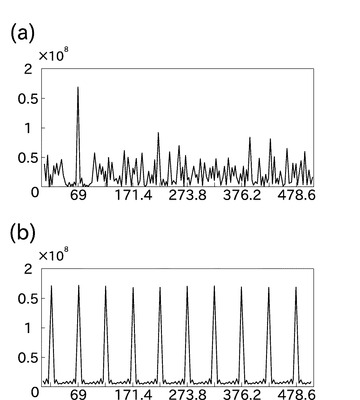
【図4】(a)不等間隔送信時のFFTの結果を示すグラフ。(b)等間隔送信時のFFTの結果を示すグラフ。
【発明を実施するための形態】
【0029】
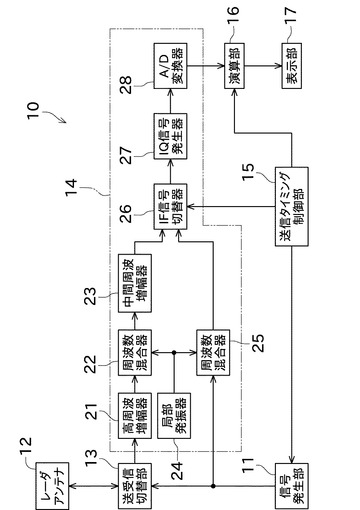
次に、図面を参照して本発明の実施の形態を説明する。初めに、図1を参照して、本実施形態の船舶用レーダ装置10の全体構成を説明する。図1は、本発明の一実施形態に係る船舶用レーダ装置10の全体的な構成を示すブロック図である。
【0030】
本実施形態の船舶用レーダ装置(レーダ装置)10は、いわゆるパルスレーダとして構成され、船舶に搭載されている。この船舶用レーダ装置10は、鋭い指向性を持ったパルス状の送信信号を放射可能であるとともに、自船の周囲にある物標(例えば陸地、海上の他船等)からの反射波を受信信号として受信するように構成されている。そして船舶用レーダ装置10は、前記受信信号を利用して、物標の位置及び形状を表示することができる。以下、この船舶用レーダ装置10の構成について説明する。
【0031】
船舶用レーダ装置10は、図1に示すように、信号発生部11と、レーダアンテナ12と、送受信切替部13と、信号処理部14と、送信タイミング制御部15と、演算部16と、表示部17と、を主要な構成として備えている。
【0032】
信号発生部11は、マグネトロンからなる送信管を備えており、パルス状のマイクロ波を発生可能に構成されている。なお、1つの送信パルス信号を発生させてから次の送信パルス信号を発生させるまでの時間(パルス送信間隔)は、送信タイミング制御部15によって制御されている。そして、このマイクロ波は適宜の導波路を経由してレーダアンテナ12まで送られる。
【0033】
レーダアンテナ12は、このマイクロ波を送信信号として送信できるとともに、受信信号を受信できるように構成されている。また、レーダアンテナ12は回転しながらこの送受信を行っているため、自船周囲の全方位の物標を検出することができる。
【0034】
送受信切替部13は、例えばサーキュレータにより構成されている。この送受信切替部13は、信号発生部11からの高エネルギーの送信信号が受信用の回路に入力されないように、また、受信信号が受信用の回路に全て入力されるように、信号の経路を適宜切り替えることができる。
【0035】
信号処理部14は、入力される信号を処理に適した強度及び周波数に変換できるように構成されている。信号処理部14は、高周波増幅器21と、周波数混合器22と、中間周波増幅器23と、局部発振器24と、周波数混合器25と、IF信号切替器26と、IQ信号発生器27と、A/D変換器28と、を備える。
【0036】
信号処理部14には、送信信号が信号発生部11から入力されるとともに、受信信号が送受信切替部13から入力されている。送信信号は、周波数混合器25に入力される。一方、受信信号は高周波増幅器21によって信号を増幅させた後に周波数混合器22に入力される。また、この周波数混合器22及び周波数混合器25には、局部発振器24から局部信号が入力される。
【0037】
局部発振器24は、所定の周波数の局部信号を発振可能に構成された発振器である。周波数混合器25は、局部発振器24の局部信号と送信信号とを混合して、中間周波信号を生成可能である。また、周波数混合器22は、局部発振器24の局部信号と受信信号とを混合して、中間周波信号を生成することができる。受信信号に基づく中間周波信号は、中間周波増幅器23へ出力される。
【0038】
中間周波増幅器23は、中間周波帯の信号を増幅するためのものであり、周波数混合器22によって作られた中間周波信号を効果的に増幅するものである。中間周波増幅器23によって増幅された信号は、IF信号切替器26へ出力される。
【0039】
IF信号切替器26には、送信信号に基づく中間周波信号と、受信信号に基づく中間周波信号と、が入力されている。また、IF信号切替器26には、送信タイミング制御部15からパルス送信間隔が入力されている。そして、IF信号切替器26は、このパルス送信間隔に基づいて、船舶用レーダ装置10が送信を行っているときは、送信信号に基づく中間周波信号をIQ信号発生器27へ出力している。一方、船舶用レーダ装置10が受信状態に切り替わると、IF信号切替器26は、受信信号に基づく中間周波信号をIQ信号発生器27へ出力するように構成されている。このように、パルス送信間隔に基づいてIF信号切替器26が信号の出力先を切り替えているため、1つのIQ信号発生器のみで送信信号及び受信信号の処理を行うことができる。
【0040】
IQ信号発生器27は、入力された中間周波信号に基づいて、直交検波を行うためのI信号とQ信号とを生成するためのものである。IQ信号発生器27は、入力された信号を2つに分岐し、一方の信号のみの位相を90°ズラしている。IQ信号発生器27は、このようにして1つの信号からI信号とQ信号との2つの信号を生成している。このIQ信号は、A/D変換器28でデジタル信号に変換された後に、演算部16へ出力される。
【0041】
演算部16は、入力された信号に基づいて、レーダアンテナ12が送信信号を送信したタイミングと、受信信号を受信したタイミングとの時間差から、物標までの距離を算出している。そして演算部16は、得られた距離と、送信信号発射時のレーダアンテナ12の向きと、に基づいてレーダ画像を生成し、表示部17に出力する。
【0042】
また、演算部16は、入力された信号に基づいて物標の相対速度を算出するように構成されている。演算部16は、算出された物標の相対速度を表示部17に出力する。
【0043】
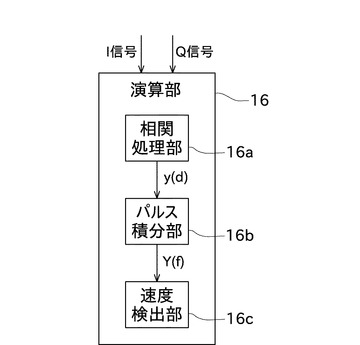
次に、図2及び図3を参照して、演算部16が相対速度を算出するために行う処理について説明する。図2は、演算部16の構成を示すブロック図である。図3は、不等間隔送信を模式的に説明する図である。
【0044】
初めに、信号発生部11が以下の式(1)及び式(2)で示す送信信号を送信しているときの、受信信号の式を導出する。この送信信号の式は、送信時刻をτkとしたときのk番目の送信信号を表している。
【数1】

【0045】
ここで、Aは振幅、u(t)はパルス幅Tの矩形パルス、fcは送信キャリア周波数、Θ(t)はランダムな初期位相を含むマグネトロンの位相変動成分を表している。
【0046】
また、船舶用レーダ装置10の送受信の伝達系が以下の式(3)で示すインパルス応答で表すことができるとすると、k番目の受信信号は、以下の式(4)で表される。なお、a,bは、式(5)で示す値を表しているとする。
【数2】
【0047】
ここで、γは伝搬と散乱による減衰、tpは送信信号が発射された時間、Lは自船から物標までの距離、cは光速、vは物標の相対速度、を表している。
【0048】
次に、演算部16の構成について説明する。図2に示すように、演算部16は、相対速度を算出するための構成として、相関処理部16aと、パルス積分部16bと、速度検出部16cと、を備えている。
【0049】
相関処理部16aはマッチドフィルタ(整合フィルタ)から構成されており、この相関処理部16aには、送信信号のIQ信号と受信信号のIQ信号とが入力されている。相関処理部16aは、これらの信号に基づいて、送信信号に対する受信信号の遅延時間を出力可能に構成されている。以下、この相関処理部16aが行う処理について説明する。
【0050】
送信信号のIQ信号は、以下の式(6)及び式(7)で表される。
【数3】
【0051】
ここで、fLは局部信号の周波数、θ(t)はその位相変動成分を表している。そして、相関処理部16aは、入力された送信信号のIQ信号に基づいて、複素ベースバンド信号h(t)を算出している。また、相関処理部16aは、入力された受信信号のIQ信号に基づいて、複素ベースバンド信号s(t)を算出している。このh(t)及びs(t)は、以下の式(8)及び式(9)で表される。ただし、Arは、以下の式(10)で表す値とする。
【数4】
【0052】
そして、遅延時間がdのときの相関処理部16aの出力y(d)は、h(t)の複素共役とs(t)との相互相関として表される。このy(t)は、以下の式(11)で表される。
【数5】
【0053】
ここで、*は、複素共役を示している。また、相関処理部16aの出力の振幅は、d=a+bτk(受信信号を受信する計算上の時間)のときに最大となる。この値を代入して計算及び適宜の近似を行った結果は、以下の式(12)で表される。なお、A’はAArを表している。
【数6】
【0054】
この値にはΘ(t)が含まれておらず、送信信号を重みとするマッチドフィルタによって、マグネトロンの位相変動成分がキャンセルされていることを示している。更に、相関処理部16aの出力の振幅が最大となる点においては、局部信号の周波数fLに基づいて、物標の位置が安定して計測できることを示している。
【0055】
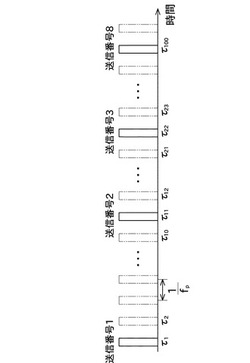
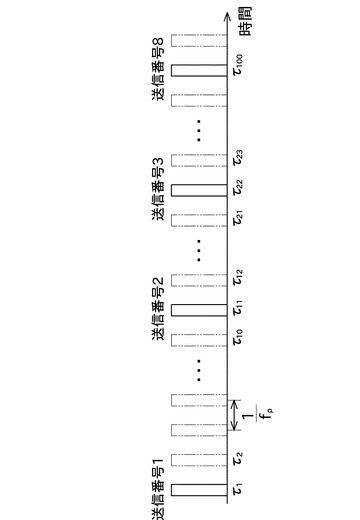
次に、本実施形態の送信信号の送信間隔について、図3を参照して説明する。図3は、不等間隔送信を模式的に説明する図である。なお、図3に示す送信信号の送信間隔は、以下の表1のようになっている。
【表1】
【0056】
図3の横軸は時間を示しており、最初の送信パルス信号が送信された時間をτ1としており、以後1/fpごとに、τ2、τ3・・・と表示している。また、図3に描かれているパルス信号のうち、実線で描かれているパルス信号が実際に送信される信号である。この送信パルス信号の送信時間は、表1の2段目に示されている。また、送信間隔は、表1の3段目に示されている。このように、本実施形態の送信パルス信号は不等間隔に送信されている。
【0057】
ここで、本実施形態で用いたマグネトロンの許容される送信間隔の下限値は、10(×1/fp)である。つまり、送信番号1と送信番号2との間の送信間隔がマグネトロンの送信間隔の下限値であり、その他の送信間隔は、この下限値よりも大きく、かつそれぞれが異なった値になっている。このように、送信間隔を不等間隔にすることで、送信パルス信号の見かけの送信繰返し周波数をfp(図3において実線及び鎖線で示すパルス信号)とすることができる。
【0058】
なお、ここで示した送信間隔は一例であり、他の値を用いることもできる。ただし、送信間隔が5、10、15・・・のように、ある送信間隔が他の送信間隔の整数倍となるように送信間隔を設定した場合は、見かけの送信繰返し周波数はfpではなくfpの数分の1となってしまうため、上記を考慮して送信間隔の設定を行うことが好ましい。
【0059】
次に、相関処理部16aの出力信号に基づいて、パルス積分部16bが行う処理について説明する。物標が自船に対して相対移動している場合、ある送信パルス信号が物標にあたってから次の送信パルス信号が物標にあたるまでに、物標の位置が変化する。そのため、受信信号同士には位相差が生じることになる。パルス積分部16bは、複数の受信信号を、位相を揃えてから足し合わせることでS/N比を向上させている。
【0060】
パルス積分部16bは、式(12)で示した相関処理部16aの出力にexp{j2πfτk}を乗じて上記の位相差を補正し、式(13)で示すようにそれらのN個の和を求めている。
【数7】
【0061】
式(13)は、送信時間τkでサンプリングされた相関処理後の信号の離散フーリエ変換になっており、速度検出部16cは、この式(13)にFFTを用いている。その結果は、以下の式(14)〜式(16)のように表される。
【数8】
【0062】
ここで、c−v=cと近似した。物標の相対速度は、この|Y|を最大にするmに基づいて算出可能である。しかし、式(16)に示すように、スペクトルは、fpを周期とする周期関数となっているため、物標の相対速度は、以下の式(17)に示すように、不定性を有している。
【数9】
【0063】
ただし、以下の式(18)が満たされるならば、物標の相対速度を一意的に求めることができる。
【数10】
【0064】
つまり、fpが高いほど物標の相対速度を高速度まで検出可能になる。本実施形態におけるfpは、見かけの送信繰返し周波数であり、この値は本来の送信繰返し周波数の上限値の数倍となっている。従って、検出限界速度を数倍にすることができる。また、船舶用レーダでは、送信管としてマグネトロンが一般的に用いられている。しかし、マグネトロンは送信繰返し周波数の上限値が低いため、物標の相対速度の検出には不向きである。この点、本実施形態の構成を用いれば、マグネトロンを用いた場合でも、他の船舶等の相対速度を検出することができる。
【0065】
また、船舶用レーダ装置10は、物標の相対速度だけでなく、物標の位置を検出している。物標の位置を一意的に検出するためには、ある送信パルス信号を発射してから次の送信パルス信号を発射するまでの間に、受信信号を受信する必要がある。つまり、パルス送信間隔が狭いと、長距離にある物標の位置を一意的に検出することができない。そのため、実際にfpの送信繰返し周波数で送信パルス信号の送信を行う構成(図3の鎖線部分も実際に送信パルス信号を送信する構成)では、長距離にある物標を一意的に検出することができない。この点、本実施形態の構成ではパルス送信間隔が広いため、長距離にある物標も一意的に検出することができる。
【0066】
なお、実際にfpの送信繰返し周波数で送信パルス信号の送信を行う構成と比べると、本実施形態の構成は単位時間あたりの送信パルス信号の数が少ないため、S/N比の改善の観点では劣ってしまう。しかし、本実施形態の構成でも十分にS/N比が改善されることが以下のシミュレーションによって示されている。
【0067】
次に、本実施形態の効果を示すために行ったシミュレーションについて説明する。
【0068】
本シミュレーションでは、50km/hの相対速度で接近する物標を設定している。また、送信信号には、実際のマグネトロンの送信信号を用いている。一方、受信信号には、当該送信信号が物標で反射して戻る受信信号に、S/N比が3dBとなるようなホワイトノイズを加えた信号を用いている。
【0069】
上記の設定に対して3種類の演算モデルによって処理を行い、それらのS/N比を比較した。第1の演算は、本実施形態で示した演算方法(不等間隔送信+マッチドフィルタ+パルス毎積分)を用いている。なお、見かけの送信繰り返し周波数fpは6500Hzとし、表1の系列に従って、8回の送受信を行った。第2の演算は、マッチドフィルタによって1回の送受信に対して処理を行う演算方法を用いている。そして、第3の演算は、帯域幅が3MHzのバンドパスフィルタを通して1回の送受信に対して直交検波を行う演算方法を用いている。
【表2】
【0070】
表2で示すように、マッチドフィルタによる演算方法は、バンドパスフィルタによる演算方法と比較して、S/N比が4.7dB改善されている。本実施形態の演算方法は、更に9.1dB改善していて、理論どおりの結果が得られた。
【0071】
次に、本実施形態で示した演算方法で不定性が解消されることを示すために行ったシミュレーションについて、図4を参照して説明する。図4(a)は、不等間隔送信時のFFTの結果を示すグラフである。図4(b)は、等間隔送信時のFFTの結果を示すグラフである。
【0072】
本シミュレーションでは、上記で示した設定に対して、不等間隔送信及び等間隔送信を行い、それぞれについてN=512点のFFTを行った。なお、等間隔送信の送信間隔は、10(×1/fp)に固定しており、送信繰返し周波数は、650Hzとなっている。
【0073】
本実施形態で示した演算方法を用いると、図4(a)に示すように、n=69にのみスペクトルのピークが現れており、ここから不定性のない相対速度を算出することができる。しかし、等間隔送信では、図4(b)に示すように、スペクトルが繰返し状になっており、スペクトルのピークが複数存在するため、不定性のない相対速度を算出することができない。
【0074】
以上に説明したように、本実施形態の船舶用レーダ装置10は、信号発生部11と、送信タイミング制御部15と、相関処理部16aと、速度検出部16cと、を備える。信号発生部11は、送信パルス信号を発生させる。送信タイミング制御部15は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部16aは、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部16cは、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0075】
これにより、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0076】
また、本実施形態の船舶用レーダ装置10において、速度検出部16cは、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出する。
【0077】
これにより、離散的なデータである相関処理結果を効率的に扱うことができる。また、高速フーリエ変換(FFT)を用いることで演算量を低減させることができる。
【0078】
また、本実施形態の船舶用レーダ装置10においては、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部16bを備える。
【0079】
これにより、1つのパルス信号の送受信に基づいて得られる値と比べて、信号値を増幅しつつノイズを同程度に抑えることができる。従って、物標の速度を精度良く検出することができるとともに、反射断面積の小さなターゲットであっても容易に検出することができる。
【0080】
また、本実施形態の船舶用レーダ装置10において、パルス積分部16bは、送信パルス信号の送信間隔中に物標の相対位置が変化することから受信信号に生じる位相差を考慮して、パルス信号毎に積分する。
【0081】
これにより、上記の位相差の影響を抑えることができるので、送信間隔を長くせざるを得ない信号発生部11を用いる場合においても受信信号のS/N比を大きくすることができるとともに、物標の速度を精度良く検出することができる。
【0082】
また、本実施形態の船舶用レーダ装置10において、送信パルス信号の送信間隔は、信号発生部11の送信間隔の下限値よりも大きい。
【0083】
これにより、送信パルス信号の送信間隔が、「下限値+α」(ただし、αは下限値より小さい時間とする)となり、αの分だけ送信間隔がズレるため、見かけの送信繰返し周波数が信号発生部11の送信繰返し周波数の上限値より高くなる。従って、物標の速度の検出限界速度を上昇させることができる。
【0084】
また、本実施形態の船舶用レーダ装置10において、信号発生部11は、マグネトロンを用いて送信パルス信号を発生させている。
【0085】
即ち、マグネトロンは送信繰返し周波数の上限値が低いため、通常の構成では、船舶の速度の検出に不向きである。しかし、送信パルス信号を不等間隔で送信することで、検出限界速度を上昇させて、船舶の速度の検出に適した構成にすることができる。
【0086】
また、本実施形態の船舶用レーダ装置10は、船舶に搭載されている。
【0087】
即ち、検出された他の船舶の速度に不定性があると、近づいて来る船舶を遠ざかっていると判断してしまうことがある。このように、船舶用のレーダ装置は不定性が生じたときの影響が大きいため、本実施形態のように構成することで、不定性を軽減するという効果を一層有効に発揮させることができる。
【0088】
また、本実施形態の物標速度検出方法は、信号発生工程と、送信タイミング制御工程と、相関処理工程と、速度検出工程と、を含む。信号発生工程は、送信パルス信号を発生させる。送信タイミング制御工程は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理工程は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出工程は、異なる送信間隔で送信された複数のパルスに対する相関処理結果に基づいて、物標の速度を検出する。
【0089】
また、本実施形態の物標速度検出プログラムは、送信タイミング制御ステップと、相関処理ステップと、速度検出ステップと、を含む処理を演算部16に実行させる。送信タイミング制御ステップは、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理ステップは、送信パルス信号の波形と、受信信号の波形と、の相関処理を行う。速度検出ステップは、異なる送信間隔で送信された複数のパルスに対する相関処理結果に基づいて、物標の速度を検出する。
【0090】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0091】
送信タイミング制御部15は、演算部16と別の構成となっているが、これに代えて演算部16が送信タイミング制御部15を含むように構成することができる。
【0092】
相関処理部16a、パルス積分部16b、及び速度検出部16cのうち少なくとも1つは、ハードウェアとして構成することに代えて、ソフトウェアとして構成することができる。
【0093】
レーダ装置は、船舶用レーダ装置に限らず、他の用途のレーダ装置にも適用することができる。
【符号の説明】
【0094】
10 船舶用レーダ装置(レーダ装置)
11 信号発生部
15 送信タイミング制御部
16 演算部
16a 相関処理部
16b パルス積分部
16c 速度検出部
【技術分野】
【0001】
本発明は、主として、物標の相対速度を検出可能なレーダ装置に関する。
【背景技術】
【0002】
従来から、回転するアンテナによってマイクロ波(送信信号)の送信を行うとともに、物標からの反射波(受信信号)を受信して、当該物標の位置を検出可能なレーダ装置が知られている。
【0003】
また、この種のレーダ装置においては、送信信号の周波数と受信信号の周波数の差(ドップラー周波数)に基づいて、自船に対する物標の相対速度を検出可能な構成が知られている。このドップラー周波数を求めるためには、信号の位相を精度良く検出する必要がある。特許文献1が開示するレーダ装置は、信号の位相を精度良く検出するために、コヒーレント信号処理を行っている。
【0004】
特許文献1のレーダ装置は、送信信号の波形情報を取り込んで記憶可能に構成されている。そして、送信信号及び受信信号に対して適宜の処理をした後に、送信信号と受信信号の関連性に基づいて処理を行っている。この処理結果に高速フーリエ変換(FFT)を施すことで、信号の精度を向上させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−132926号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1のレーダ装置を用いて物標の相対速度を検出すると、検出された相対速度に不定性が生じる。この不定性は、検出された相対速度が一定値(検出限界速度)以上のときに現れるため、想定される物標の相対速度が検出限界速度以上である場合には、正しい相対速度を検出することができない。
【0007】
この検出限界速度を上げるためには、送信管の送信繰返し周波数を高くする必要がある。しかし、送信管には送信繰返し周波数の上限値が定められており、この上限値を超えてしまうと送信管が破損してしまうことがある。そのため、検出限界速度を上昇させることが困難であり、改善が望まれていた。
【0008】
本発明は以上の事情に鑑みてされたものであり、その目的は、不定性を生じさせることなく、物標の相対速度を広範囲にわたって検出可能なレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本発明の第1の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、信号発生部と、送信タイミング制御部と、相関処理部と、速度検出部と、を備える。前記信号発生部は、送信パルス信号を発生させる。前記送信タイミング制御部は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理部は、前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。前記速度検出部は、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0011】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0012】
前記のレーダ装置において、前記速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出することが好ましい。
【0013】
これにより、離散的なデータである相関処理結果を効率的に扱うことができる。また、高速フーリエ変換(FFT)を用いることで演算量を低減させることができる。
【0014】
前記のレーダ装置においては、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部を備えることが好ましい。
【0015】
これにより、1つのパルス信号の送受信に基づいて得られる値と比べて、信号値を増幅しつつノイズを同程度に抑えることができる。従って、物標の速度を精度良く検出することができるとともに、反射断面積の小さなターゲットであっても容易に検出することが可能になる。
【0016】
前記のレーダ装置において、前記パルス積分部は、前記送信パルス信号の送信間隔中に物標の相対位置が変化することから前記受信信号に生じる位相差を考慮して、パルス信号毎に積分することが好ましい。
【0017】
これにより、上記の位相差の影響を抑えることができるので、送信間隔を長くせざるを得ない信号発生部を用いる場合においても、受信信号のS/N比を大きくすることができるとともに、物標の速度を精度良く検出することができる。
【0018】
前記のレーダ装置において、前記送信パルス信号の送信間隔は、前記信号発生部の送信間隔の下限値よりも大きいことが好ましい。
【0019】
これにより、送信パルス信号の送信間隔が「下限値+α」(ただし、αは下限値より小さい時間とする)となり、αの分だけ送信間隔がズレるため、見かけの送信繰返し周波数が信号発生部の送信繰返し周波数の上限値より高くなる。従って、物標の速度の検出限界速度を上昇させることができる。
【0020】
前記のレーダ装置においては、前記信号発生部は、マグネトロンを用いて送信パルス信号を発生させることが好ましい。
【0021】
即ち、マグネトロンは送信繰返し周波数の上限値が低いため、通常の構成では、相対速度が遅い物標の速度しか検出することができない。しかし、上記の構成を用いることで、検出限界速度を上昇させて、相対速度が速い物標の速度を検出することができる。
【0022】
前記のレーダ装置は、船舶に搭載されることが好ましい。
【0023】
即ち、検出された他の船舶の速度に不定性があると、近づいて来る船舶を遠ざかっていると判断してしまうことがある。このように、船舶用のレーダ装置は不定性が生じたときの影響が大きいため、本発明を船舶用のレーダ装置に適用することで、不定性を軽減するという効果を一層有効に発揮させることができる。
【0024】
本発明の第2の観点によれば、以下の物標速度検出方法が提供される。即ち、この物標速度検出方法は、信号発生工程と、送信タイミング制御工程と、相関処理工程と、速度検出工程と、を含む。前記信号発生工程は、送信パルス信号を発生させる。前記送信タイミング制御工程は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理工程は、前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。前記速度検出工程は、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0025】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0026】
本発明の第3の観点によれば、送信パルス信号を送信し、物標で反射した送信パルス信号を受信信号として受信し、演算部によって当該物標の速度を算出する構成のレーダ装置において、以下の物標速度検出プログラムが提供される。即ち、この物標速度検出プログラムは、送信タイミング制御ステップと、相関処理ステップと、速度検出ステップと、を含む処理を演算部に実行させる。前記送信タイミング制御ステップは、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。前記相関処理ステップは、前記送信パルス信号の波形と、受信信号の波形と、の相関処理を行う。前記速度検出ステップは、複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0027】
これにより、送信繰返し周波数が低いために、検出される相対速度に不定性が生じた場合においても、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【図面の簡単な説明】
【0028】
【図1】本発明の一実施形態に係る船舶用レーダ装置の全体的な構成を示すブロック図。
【図2】演算部の構成を示すブロック図。
【図3】不等間隔送信を模式的に説明する図。
【図4】(a)不等間隔送信時のFFTの結果を示すグラフ。(b)等間隔送信時のFFTの結果を示すグラフ。
【発明を実施するための形態】
【0029】
次に、図面を参照して本発明の実施の形態を説明する。初めに、図1を参照して、本実施形態の船舶用レーダ装置10の全体構成を説明する。図1は、本発明の一実施形態に係る船舶用レーダ装置10の全体的な構成を示すブロック図である。
【0030】
本実施形態の船舶用レーダ装置(レーダ装置)10は、いわゆるパルスレーダとして構成され、船舶に搭載されている。この船舶用レーダ装置10は、鋭い指向性を持ったパルス状の送信信号を放射可能であるとともに、自船の周囲にある物標(例えば陸地、海上の他船等)からの反射波を受信信号として受信するように構成されている。そして船舶用レーダ装置10は、前記受信信号を利用して、物標の位置及び形状を表示することができる。以下、この船舶用レーダ装置10の構成について説明する。
【0031】
船舶用レーダ装置10は、図1に示すように、信号発生部11と、レーダアンテナ12と、送受信切替部13と、信号処理部14と、送信タイミング制御部15と、演算部16と、表示部17と、を主要な構成として備えている。
【0032】
信号発生部11は、マグネトロンからなる送信管を備えており、パルス状のマイクロ波を発生可能に構成されている。なお、1つの送信パルス信号を発生させてから次の送信パルス信号を発生させるまでの時間(パルス送信間隔)は、送信タイミング制御部15によって制御されている。そして、このマイクロ波は適宜の導波路を経由してレーダアンテナ12まで送られる。
【0033】
レーダアンテナ12は、このマイクロ波を送信信号として送信できるとともに、受信信号を受信できるように構成されている。また、レーダアンテナ12は回転しながらこの送受信を行っているため、自船周囲の全方位の物標を検出することができる。
【0034】
送受信切替部13は、例えばサーキュレータにより構成されている。この送受信切替部13は、信号発生部11からの高エネルギーの送信信号が受信用の回路に入力されないように、また、受信信号が受信用の回路に全て入力されるように、信号の経路を適宜切り替えることができる。
【0035】
信号処理部14は、入力される信号を処理に適した強度及び周波数に変換できるように構成されている。信号処理部14は、高周波増幅器21と、周波数混合器22と、中間周波増幅器23と、局部発振器24と、周波数混合器25と、IF信号切替器26と、IQ信号発生器27と、A/D変換器28と、を備える。
【0036】
信号処理部14には、送信信号が信号発生部11から入力されるとともに、受信信号が送受信切替部13から入力されている。送信信号は、周波数混合器25に入力される。一方、受信信号は高周波増幅器21によって信号を増幅させた後に周波数混合器22に入力される。また、この周波数混合器22及び周波数混合器25には、局部発振器24から局部信号が入力される。
【0037】
局部発振器24は、所定の周波数の局部信号を発振可能に構成された発振器である。周波数混合器25は、局部発振器24の局部信号と送信信号とを混合して、中間周波信号を生成可能である。また、周波数混合器22は、局部発振器24の局部信号と受信信号とを混合して、中間周波信号を生成することができる。受信信号に基づく中間周波信号は、中間周波増幅器23へ出力される。
【0038】
中間周波増幅器23は、中間周波帯の信号を増幅するためのものであり、周波数混合器22によって作られた中間周波信号を効果的に増幅するものである。中間周波増幅器23によって増幅された信号は、IF信号切替器26へ出力される。
【0039】
IF信号切替器26には、送信信号に基づく中間周波信号と、受信信号に基づく中間周波信号と、が入力されている。また、IF信号切替器26には、送信タイミング制御部15からパルス送信間隔が入力されている。そして、IF信号切替器26は、このパルス送信間隔に基づいて、船舶用レーダ装置10が送信を行っているときは、送信信号に基づく中間周波信号をIQ信号発生器27へ出力している。一方、船舶用レーダ装置10が受信状態に切り替わると、IF信号切替器26は、受信信号に基づく中間周波信号をIQ信号発生器27へ出力するように構成されている。このように、パルス送信間隔に基づいてIF信号切替器26が信号の出力先を切り替えているため、1つのIQ信号発生器のみで送信信号及び受信信号の処理を行うことができる。
【0040】
IQ信号発生器27は、入力された中間周波信号に基づいて、直交検波を行うためのI信号とQ信号とを生成するためのものである。IQ信号発生器27は、入力された信号を2つに分岐し、一方の信号のみの位相を90°ズラしている。IQ信号発生器27は、このようにして1つの信号からI信号とQ信号との2つの信号を生成している。このIQ信号は、A/D変換器28でデジタル信号に変換された後に、演算部16へ出力される。
【0041】
演算部16は、入力された信号に基づいて、レーダアンテナ12が送信信号を送信したタイミングと、受信信号を受信したタイミングとの時間差から、物標までの距離を算出している。そして演算部16は、得られた距離と、送信信号発射時のレーダアンテナ12の向きと、に基づいてレーダ画像を生成し、表示部17に出力する。
【0042】
また、演算部16は、入力された信号に基づいて物標の相対速度を算出するように構成されている。演算部16は、算出された物標の相対速度を表示部17に出力する。
【0043】
次に、図2及び図3を参照して、演算部16が相対速度を算出するために行う処理について説明する。図2は、演算部16の構成を示すブロック図である。図3は、不等間隔送信を模式的に説明する図である。
【0044】
初めに、信号発生部11が以下の式(1)及び式(2)で示す送信信号を送信しているときの、受信信号の式を導出する。この送信信号の式は、送信時刻をτkとしたときのk番目の送信信号を表している。
【数1】
【0045】
ここで、Aは振幅、u(t)はパルス幅Tの矩形パルス、fcは送信キャリア周波数、Θ(t)はランダムな初期位相を含むマグネトロンの位相変動成分を表している。
【0046】
また、船舶用レーダ装置10の送受信の伝達系が以下の式(3)で示すインパルス応答で表すことができるとすると、k番目の受信信号は、以下の式(4)で表される。なお、a,bは、式(5)で示す値を表しているとする。
【数2】
【0047】
ここで、γは伝搬と散乱による減衰、tpは送信信号が発射された時間、Lは自船から物標までの距離、cは光速、vは物標の相対速度、を表している。
【0048】
次に、演算部16の構成について説明する。図2に示すように、演算部16は、相対速度を算出するための構成として、相関処理部16aと、パルス積分部16bと、速度検出部16cと、を備えている。
【0049】
相関処理部16aはマッチドフィルタ(整合フィルタ)から構成されており、この相関処理部16aには、送信信号のIQ信号と受信信号のIQ信号とが入力されている。相関処理部16aは、これらの信号に基づいて、送信信号に対する受信信号の遅延時間を出力可能に構成されている。以下、この相関処理部16aが行う処理について説明する。
【0050】
送信信号のIQ信号は、以下の式(6)及び式(7)で表される。
【数3】
【0051】
ここで、fLは局部信号の周波数、θ(t)はその位相変動成分を表している。そして、相関処理部16aは、入力された送信信号のIQ信号に基づいて、複素ベースバンド信号h(t)を算出している。また、相関処理部16aは、入力された受信信号のIQ信号に基づいて、複素ベースバンド信号s(t)を算出している。このh(t)及びs(t)は、以下の式(8)及び式(9)で表される。ただし、Arは、以下の式(10)で表す値とする。
【数4】
【0052】
そして、遅延時間がdのときの相関処理部16aの出力y(d)は、h(t)の複素共役とs(t)との相互相関として表される。このy(t)は、以下の式(11)で表される。
【数5】
【0053】
ここで、*は、複素共役を示している。また、相関処理部16aの出力の振幅は、d=a+bτk(受信信号を受信する計算上の時間)のときに最大となる。この値を代入して計算及び適宜の近似を行った結果は、以下の式(12)で表される。なお、A’はAArを表している。
【数6】
【0054】
この値にはΘ(t)が含まれておらず、送信信号を重みとするマッチドフィルタによって、マグネトロンの位相変動成分がキャンセルされていることを示している。更に、相関処理部16aの出力の振幅が最大となる点においては、局部信号の周波数fLに基づいて、物標の位置が安定して計測できることを示している。
【0055】
次に、本実施形態の送信信号の送信間隔について、図3を参照して説明する。図3は、不等間隔送信を模式的に説明する図である。なお、図3に示す送信信号の送信間隔は、以下の表1のようになっている。
【表1】
【0056】
図3の横軸は時間を示しており、最初の送信パルス信号が送信された時間をτ1としており、以後1/fpごとに、τ2、τ3・・・と表示している。また、図3に描かれているパルス信号のうち、実線で描かれているパルス信号が実際に送信される信号である。この送信パルス信号の送信時間は、表1の2段目に示されている。また、送信間隔は、表1の3段目に示されている。このように、本実施形態の送信パルス信号は不等間隔に送信されている。
【0057】
ここで、本実施形態で用いたマグネトロンの許容される送信間隔の下限値は、10(×1/fp)である。つまり、送信番号1と送信番号2との間の送信間隔がマグネトロンの送信間隔の下限値であり、その他の送信間隔は、この下限値よりも大きく、かつそれぞれが異なった値になっている。このように、送信間隔を不等間隔にすることで、送信パルス信号の見かけの送信繰返し周波数をfp(図3において実線及び鎖線で示すパルス信号)とすることができる。
【0058】
なお、ここで示した送信間隔は一例であり、他の値を用いることもできる。ただし、送信間隔が5、10、15・・・のように、ある送信間隔が他の送信間隔の整数倍となるように送信間隔を設定した場合は、見かけの送信繰返し周波数はfpではなくfpの数分の1となってしまうため、上記を考慮して送信間隔の設定を行うことが好ましい。
【0059】
次に、相関処理部16aの出力信号に基づいて、パルス積分部16bが行う処理について説明する。物標が自船に対して相対移動している場合、ある送信パルス信号が物標にあたってから次の送信パルス信号が物標にあたるまでに、物標の位置が変化する。そのため、受信信号同士には位相差が生じることになる。パルス積分部16bは、複数の受信信号を、位相を揃えてから足し合わせることでS/N比を向上させている。
【0060】
パルス積分部16bは、式(12)で示した相関処理部16aの出力にexp{j2πfτk}を乗じて上記の位相差を補正し、式(13)で示すようにそれらのN個の和を求めている。
【数7】
【0061】
式(13)は、送信時間τkでサンプリングされた相関処理後の信号の離散フーリエ変換になっており、速度検出部16cは、この式(13)にFFTを用いている。その結果は、以下の式(14)〜式(16)のように表される。
【数8】
【0062】
ここで、c−v=cと近似した。物標の相対速度は、この|Y|を最大にするmに基づいて算出可能である。しかし、式(16)に示すように、スペクトルは、fpを周期とする周期関数となっているため、物標の相対速度は、以下の式(17)に示すように、不定性を有している。
【数9】
【0063】
ただし、以下の式(18)が満たされるならば、物標の相対速度を一意的に求めることができる。
【数10】
【0064】
つまり、fpが高いほど物標の相対速度を高速度まで検出可能になる。本実施形態におけるfpは、見かけの送信繰返し周波数であり、この値は本来の送信繰返し周波数の上限値の数倍となっている。従って、検出限界速度を数倍にすることができる。また、船舶用レーダでは、送信管としてマグネトロンが一般的に用いられている。しかし、マグネトロンは送信繰返し周波数の上限値が低いため、物標の相対速度の検出には不向きである。この点、本実施形態の構成を用いれば、マグネトロンを用いた場合でも、他の船舶等の相対速度を検出することができる。
【0065】
また、船舶用レーダ装置10は、物標の相対速度だけでなく、物標の位置を検出している。物標の位置を一意的に検出するためには、ある送信パルス信号を発射してから次の送信パルス信号を発射するまでの間に、受信信号を受信する必要がある。つまり、パルス送信間隔が狭いと、長距離にある物標の位置を一意的に検出することができない。そのため、実際にfpの送信繰返し周波数で送信パルス信号の送信を行う構成(図3の鎖線部分も実際に送信パルス信号を送信する構成)では、長距離にある物標を一意的に検出することができない。この点、本実施形態の構成ではパルス送信間隔が広いため、長距離にある物標も一意的に検出することができる。
【0066】
なお、実際にfpの送信繰返し周波数で送信パルス信号の送信を行う構成と比べると、本実施形態の構成は単位時間あたりの送信パルス信号の数が少ないため、S/N比の改善の観点では劣ってしまう。しかし、本実施形態の構成でも十分にS/N比が改善されることが以下のシミュレーションによって示されている。
【0067】
次に、本実施形態の効果を示すために行ったシミュレーションについて説明する。
【0068】
本シミュレーションでは、50km/hの相対速度で接近する物標を設定している。また、送信信号には、実際のマグネトロンの送信信号を用いている。一方、受信信号には、当該送信信号が物標で反射して戻る受信信号に、S/N比が3dBとなるようなホワイトノイズを加えた信号を用いている。
【0069】
上記の設定に対して3種類の演算モデルによって処理を行い、それらのS/N比を比較した。第1の演算は、本実施形態で示した演算方法(不等間隔送信+マッチドフィルタ+パルス毎積分)を用いている。なお、見かけの送信繰り返し周波数fpは6500Hzとし、表1の系列に従って、8回の送受信を行った。第2の演算は、マッチドフィルタによって1回の送受信に対して処理を行う演算方法を用いている。そして、第3の演算は、帯域幅が3MHzのバンドパスフィルタを通して1回の送受信に対して直交検波を行う演算方法を用いている。
【表2】
【0070】
表2で示すように、マッチドフィルタによる演算方法は、バンドパスフィルタによる演算方法と比較して、S/N比が4.7dB改善されている。本実施形態の演算方法は、更に9.1dB改善していて、理論どおりの結果が得られた。
【0071】
次に、本実施形態で示した演算方法で不定性が解消されることを示すために行ったシミュレーションについて、図4を参照して説明する。図4(a)は、不等間隔送信時のFFTの結果を示すグラフである。図4(b)は、等間隔送信時のFFTの結果を示すグラフである。
【0072】
本シミュレーションでは、上記で示した設定に対して、不等間隔送信及び等間隔送信を行い、それぞれについてN=512点のFFTを行った。なお、等間隔送信の送信間隔は、10(×1/fp)に固定しており、送信繰返し周波数は、650Hzとなっている。
【0073】
本実施形態で示した演算方法を用いると、図4(a)に示すように、n=69にのみスペクトルのピークが現れており、ここから不定性のない相対速度を算出することができる。しかし、等間隔送信では、図4(b)に示すように、スペクトルが繰返し状になっており、スペクトルのピークが複数存在するため、不定性のない相対速度を算出することができない。
【0074】
以上に説明したように、本実施形態の船舶用レーダ装置10は、信号発生部11と、送信タイミング制御部15と、相関処理部16aと、速度検出部16cと、を備える。信号発生部11は、送信パルス信号を発生させる。送信タイミング制御部15は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理部16aは、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出部16cは、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する。
【0075】
これにより、不等間隔で送信パルス信号を送信することで、送信管に負担を掛けない送信間隔を保ちつつ、見かけの送信繰返し周波数を高くすることができる。従って、物標の速度の検出限界速度を上昇させることができる。また、他のレーダ装置の送信間隔と異なるタイミングで送信を行うことになるため、信号同士が干渉することを防止できる。
【0076】
また、本実施形態の船舶用レーダ装置10において、速度検出部16cは、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出する。
【0077】
これにより、離散的なデータである相関処理結果を効率的に扱うことができる。また、高速フーリエ変換(FFT)を用いることで演算量を低減させることができる。
【0078】
また、本実施形態の船舶用レーダ装置10においては、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部16bを備える。
【0079】
これにより、1つのパルス信号の送受信に基づいて得られる値と比べて、信号値を増幅しつつノイズを同程度に抑えることができる。従って、物標の速度を精度良く検出することができるとともに、反射断面積の小さなターゲットであっても容易に検出することができる。
【0080】
また、本実施形態の船舶用レーダ装置10において、パルス積分部16bは、送信パルス信号の送信間隔中に物標の相対位置が変化することから受信信号に生じる位相差を考慮して、パルス信号毎に積分する。
【0081】
これにより、上記の位相差の影響を抑えることができるので、送信間隔を長くせざるを得ない信号発生部11を用いる場合においても受信信号のS/N比を大きくすることができるとともに、物標の速度を精度良く検出することができる。
【0082】
また、本実施形態の船舶用レーダ装置10において、送信パルス信号の送信間隔は、信号発生部11の送信間隔の下限値よりも大きい。
【0083】
これにより、送信パルス信号の送信間隔が、「下限値+α」(ただし、αは下限値より小さい時間とする)となり、αの分だけ送信間隔がズレるため、見かけの送信繰返し周波数が信号発生部11の送信繰返し周波数の上限値より高くなる。従って、物標の速度の検出限界速度を上昇させることができる。
【0084】
また、本実施形態の船舶用レーダ装置10において、信号発生部11は、マグネトロンを用いて送信パルス信号を発生させている。
【0085】
即ち、マグネトロンは送信繰返し周波数の上限値が低いため、通常の構成では、船舶の速度の検出に不向きである。しかし、送信パルス信号を不等間隔で送信することで、検出限界速度を上昇させて、船舶の速度の検出に適した構成にすることができる。
【0086】
また、本実施形態の船舶用レーダ装置10は、船舶に搭載されている。
【0087】
即ち、検出された他の船舶の速度に不定性があると、近づいて来る船舶を遠ざかっていると判断してしまうことがある。このように、船舶用のレーダ装置は不定性が生じたときの影響が大きいため、本実施形態のように構成することで、不定性を軽減するという効果を一層有効に発揮させることができる。
【0088】
また、本実施形態の物標速度検出方法は、信号発生工程と、送信タイミング制御工程と、相関処理工程と、速度検出工程と、を含む。信号発生工程は、送信パルス信号を発生させる。送信タイミング制御工程は、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理工程は、送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う。速度検出工程は、異なる送信間隔で送信された複数のパルスに対する相関処理結果に基づいて、物標の速度を検出する。
【0089】
また、本実施形態の物標速度検出プログラムは、送信タイミング制御ステップと、相関処理ステップと、速度検出ステップと、を含む処理を演算部16に実行させる。送信タイミング制御ステップは、連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する。相関処理ステップは、送信パルス信号の波形と、受信信号の波形と、の相関処理を行う。速度検出ステップは、異なる送信間隔で送信された複数のパルスに対する相関処理結果に基づいて、物標の速度を検出する。
【0090】
以上に本発明の好適な実施の形態を説明したが、上記の構成は例えば以下のように変更することができる。
【0091】
送信タイミング制御部15は、演算部16と別の構成となっているが、これに代えて演算部16が送信タイミング制御部15を含むように構成することができる。
【0092】
相関処理部16a、パルス積分部16b、及び速度検出部16cのうち少なくとも1つは、ハードウェアとして構成することに代えて、ソフトウェアとして構成することができる。
【0093】
レーダ装置は、船舶用レーダ装置に限らず、他の用途のレーダ装置にも適用することができる。
【符号の説明】
【0094】
10 船舶用レーダ装置(レーダ装置)
11 信号発生部
15 送信タイミング制御部
16 演算部
16a 相関処理部
16b パルス積分部
16c 速度検出部
【特許請求の範囲】
【請求項1】
送信パルス信号を発生させる信号発生部と、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御部と、
前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う相関処理部と、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出部と、
を備えることを特徴とするレーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
前記速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出することを特徴とするレーダ装置。
【請求項3】
請求項1又は2に記載のレーダ装置であって、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部を備えることを特徴とするレーダ装置。
【請求項4】
請求項3に記載のレーダ装置であって、
前記パルス積分部は、前記送信パルス信号の送信間隔中に物標の相対位置が変化することから前記受信信号に生じる位相差を補正して、パルス信号毎に積分することを特徴とするレーダ装置。
【請求項5】
請求項1から4までの何れか一項に記載のレーダ装置であって、
前記送信パルス信号の送信間隔は、前記信号発生部の送信間隔の下限値よりも大きいことを特徴とするレーダ装置。
【請求項6】
請求項1から5までの何れか一項に記載のレーダ装置であって、
前記信号発生部は、マグネトロンを用いて送信パルス信号を発生させることを特徴とするレーダ装置。
【請求項7】
請求項1から6までの何れか一項に記載のレーダ装置であって、
船舶に搭載されることを特徴とするレーダ装置。
【請求項8】
送信パルス信号を発生させる信号発生工程と、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御工程と、
前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う相関処理工程と、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出工程と、
を含むことを特徴とする物標速度検出方法。
【請求項9】
送信パルス信号を送信し、物標で反射した送信パルス信号を受信信号として受信し、演算部によって当該物標の速度を算出するレーダ装置において、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御ステップと、
前記送信パルス信号の波形と、受信信号の波形と、の相関処理を行う相関処理ステップと、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出ステップと、
を含む処理を演算部に実行させることを特徴とする物標速度検出プログラム。
【請求項1】
送信パルス信号を発生させる信号発生部と、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御部と、
前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う相関処理部と、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出部と、
を備えることを特徴とするレーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
前記速度検出部は、異なる送信間隔で送信された複数のパルス信号に対する相関処理結果を離散フーリエ変換することにより、物標の速度を検出することを特徴とするレーダ装置。
【請求項3】
請求項1又は2に記載のレーダ装置であって、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果をパルス信号毎に積分するパルス積分部を備えることを特徴とするレーダ装置。
【請求項4】
請求項3に記載のレーダ装置であって、
前記パルス積分部は、前記送信パルス信号の送信間隔中に物標の相対位置が変化することから前記受信信号に生じる位相差を補正して、パルス信号毎に積分することを特徴とするレーダ装置。
【請求項5】
請求項1から4までの何れか一項に記載のレーダ装置であって、
前記送信パルス信号の送信間隔は、前記信号発生部の送信間隔の下限値よりも大きいことを特徴とするレーダ装置。
【請求項6】
請求項1から5までの何れか一項に記載のレーダ装置であって、
前記信号発生部は、マグネトロンを用いて送信パルス信号を発生させることを特徴とするレーダ装置。
【請求項7】
請求項1から6までの何れか一項に記載のレーダ装置であって、
船舶に搭載されることを特徴とするレーダ装置。
【請求項8】
送信パルス信号を発生させる信号発生工程と、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御工程と、
前記送信パルス信号の波形と、物標で反射した受信信号の波形と、の相関処理を行う相関処理工程と、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出工程と、
を含むことを特徴とする物標速度検出方法。
【請求項9】
送信パルス信号を送信し、物標で反射した送信パルス信号を受信信号として受信し、演算部によって当該物標の速度を算出するレーダ装置において、
連続する所定数の送信パルス信号の送信間隔が、それぞれ異なるように送信タイミングを制御する送信タイミング制御ステップと、
前記送信パルス信号の波形と、受信信号の波形と、の相関処理を行う相関処理ステップと、
異なる送信間隔で送信された複数のパルス信号に対する相関処理結果に基づいて、物標の速度を検出する速度検出ステップと、
を含む処理を演算部に実行させることを特徴とする物標速度検出プログラム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−203185(P2011−203185A)
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願番号】特願2010−72593(P2010−72593)
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]