
レーダ装置、目標類別装置及び目標類別プログラム
【課題】ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
【解決手段】特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標からのレーダエコーから作成される逆合成開口レーダ(ISAR:Inverse Synthetic Aperture Radar)画像を用いて目標を類別するレーダ装置、目標類別装置及び目標類別プログラムに関する。
【背景技術】
【0002】
レーダエコーから作成されるISAR画像を用いて目標の類別を行う処理では、ISAR画像に含まれる目標と予めデータベースに記憶されている目標形状情報とを模擬・照合する手法、或いは、ISAR画像及び目標形状情報の双方からそれぞれ複数の特徴点を抽出し、対応するそれぞれの特徴点を照合する手法が取られている。
【0003】
ところで、上記従来の方法では、ISAR画像における目標の一部が欠落している場合又は不鮮明である場合、類別結果を取得するためには、目標の構造物間の絶対長を測定する必要がある(例えば、特許文献1参照)。なお、目標の一部が欠落している場合又は不鮮明である場合とは、船舶を例にすると、船首及び船尾のうち少なくともいずれか一方が欠落している場合又は不鮮明である場合のことである。
【0004】
目標の構造物間の絶対長を測定するためには、レーダの追尾機能により目標のアスペクト角を算出し、ISAR画像上の船首又は船尾を判別する。そして、ISAR画像上のレンジの距離に基づき、船首又は船尾から特徴点までの絶対長を算出している。しかしながら、アスペクト角の算出の精度は高くなく、精度を上げようとすると時間がかかるという問題がある。そのため、目標の構造物間の絶対長を精度良く測定することは困難であり、したがって、ISAR画像における目標の一部が欠落している場合又は不鮮明である場合には、良好な類別結果を取得することが困難である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−157012号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、従来のレーダ装置では、ISAR画像における目標の一部が欠落している場合等に、良好な類別結果を取得するためには、目標の構造物間の絶対長を精度良く測定することが求められる。しかし、目標のアスペクト角を精度良く算出するには時間がかかり、目標の構造物間の絶対長を精度良く測定することは困難であるという問題がある。
【0007】
この発明は上記事情によりなされたもので、その目的は、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係るレーダ装置は、レーダエコーに基づいてISAR画像を生成するレーダ装置において、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する再計算部と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と、前記選択された第1の目標形状情報を表示する表示部とを具備する。
【0009】
また、本発明に係る目標類別装置は、レーダエコーに基づいてISAR画像を生成するレーダ装置で用いられる目標類別装置において、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを、前記指定構造物毎に生成する再計算部と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部とを具備する。
【0010】
また、本発明に係る目標類別プログラムは、レーダエコーに基づいて目標のISAR画像を生成する画像生成部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部とを具備するレーダ装置で用いられる目標類別プログラムであって、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を生成する基準情報生成処理と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する相対情報生成処理と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算処理とを前記レーダ装置のコンピュータに実行させることを特徴とする。
【0011】
上記構成によるレーダ装置、目標類別装置及び目標類別プログラムでは、特徴点設定部は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部は、記憶部に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、類似度の高いサンプルの元となった目標形状情報を選択する。これにより、ISAR画像中の特徴点間の距離を基準距離に対する相対距離で表すことが可能となり、目標と類似する目標形状情報をユーザに提示することが可能となる。すなわち、特徴点間の絶対長を測定せずとも、目標を類別するための目標形状情報をユーザに対して提示することが可能となる。
【発明の効果】
【0012】
この発明によれば、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供することができる。
【図面の簡単な説明】
【0013】
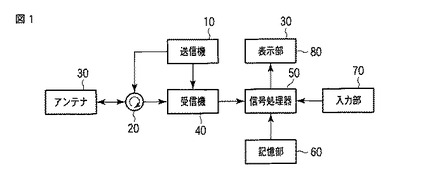
【図1】本発明の第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。
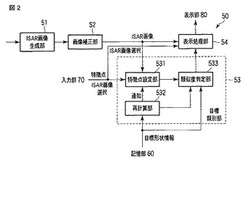
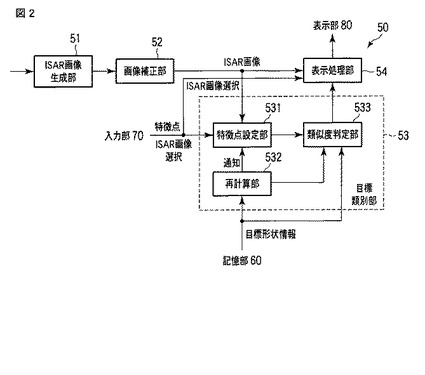
【図2】図1の信号処理器の機能構成を示すブロック図である。
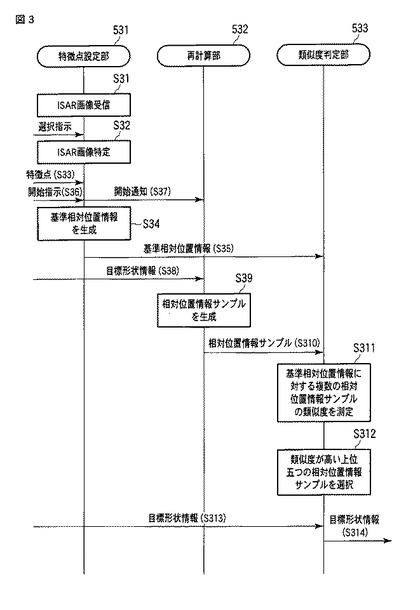
【図3】図2の目標類別部における目標類別処理のシーケンス図を示す図である。
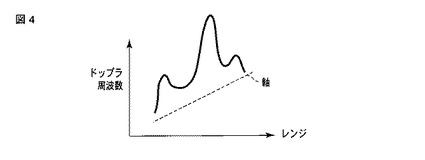
【図4】図2のISAR画像生成部で生成されるISAR画像の一例を示す図である。
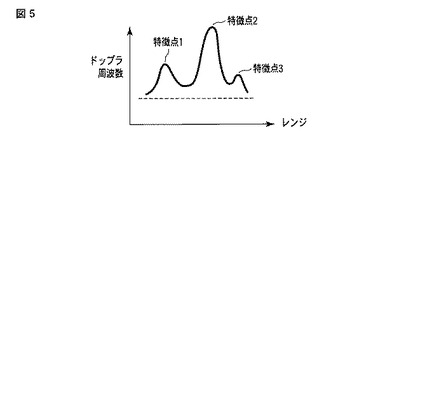
【図5】図2の画像補正部で補正されたISAR画像の一例を示す図である。
【図6】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成される相対位置情報サンプルの一例を示す図である。
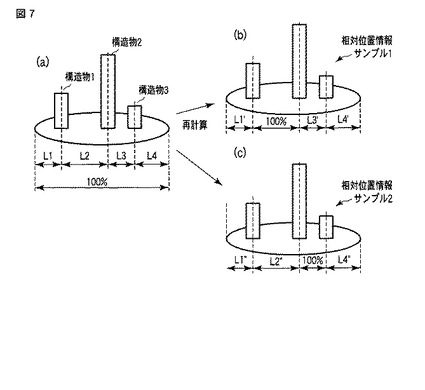
【図7】図2の特徴点設定部で生成される基準相対位置情報の一例を示す図である。
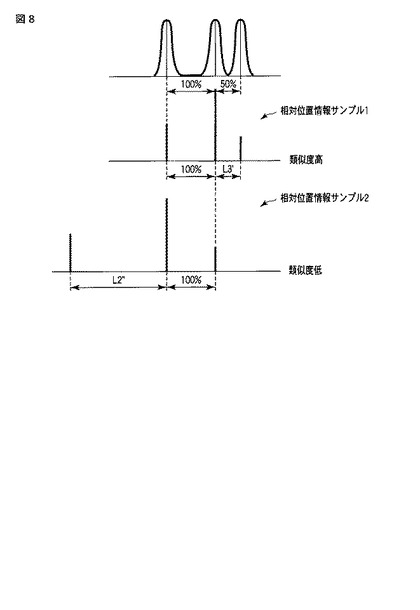
【図8】図2の類似度判定部における類似度判定処理の一例を示す図である。
【図9】第2の実施形態における図2の目標類別部による目標類別処理のシーケンス図を示す図である。
【図10】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成される相対高度差情報サンプルの一例を示す図である。
【図11】図2の特徴点設定部で生成される基準相対差情報の一例を示す図である。
【図12】図2の類似度判定部における類似度判定処理の一例を示す図である。
【図13】第3の実施形態における図2の目標類別部による目標類別処理のシーケンス図を示す図である。
【図14】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成されるサンプルベクトルの一例を示す図である。
【図15】図2の特徴点設定部で生成される基準ベクトルの一例を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明に係るレーダ装置、目標類別装置及び目標類別プログラムの実施の形態について詳細に説明する。
【0015】
[第1の実施形態]
図1は、本発明の第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。図1におけるレーダ装置は、送信機10、サーキュレータ20、アンテナ30、受信機40、信号処理器50、記憶部60、入力部70及び表示部80を具備する。
【0016】
送信機10は、所定の送信周期でRF信号を生成し、生成したRF信号をサーキュレータ20を介してアンテナ30から空間へ送信する。アンテナ30から送信された送信波の一部は、目標で反射され、反射エコーとしてアンテナ30により受信される。
【0017】
サーキュレータ20は、送受信信号を分離するための循環回路である。すなわち、サーキュレータ20は、送信機10が生成したRF信号をアンテナ30へ供給し、アンテナ30で受信した反射エコーを受信信号として受信機40へ供給する。
【0018】
受信機40は、送信機10がRF信号を生成する送信周期に基づいて受信信号から反射エコーを判別し、レーダビデオ信号を生成する。受信機40は、生成したレーダビデオ信号を信号処理器50へ出力する。
【0019】
記憶部60は、レーダ装置による捕獲が想定される種々の目標の形状、具体的には種々の船舶の形状に関する情報(以下、目標形状情報と称する)が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報等とのデータが含まれている。
【0020】
入力部70は、レーダ装置のユーザから操作指示を受ける。入力部70から入力された操作指示は、信号処理器50へ供給される。表示部80は、LCD(Liquid Crystal Display)等を備え、信号処理器50で処理された信号を表示する。ユーザは、表示部80に表示される画像に基づいて、目標を類別する。
【0021】
図2は、本発明の一実施形態に係る信号処理器50の機能構成を示すブロック図である。図2における信号処理器50は、例えば、CPU(Central Processing Unit)のみならず、ROM(Read Only Memory)、RAM(Random Access Memory)等のCPUが処理を実行するためのプログラムやデータの格納領域等を含んでいる。信号処理器50は、格納領域に格納されている目標類別プログラムをCPUで実行することで以下の構成を備える。すなわち、信号処理器50は、ISAR画像生成部51、画像補正部52、目標類別部53及び表示処理部54を備える。
【0022】
ISAR画像生成部51は、受信機40で生成されたレーダビデオ信号を受け取り、ISAR画像を生成する。ISAR画像生成部51は、生成したISAR画像を画像補正部52へ出力する。
【0023】
画像補正部52は、ISAR画像生成部51で生成したISAR画像における軸を検出する。画像補正部52は、検出した軸の傾きが水平となるように、ISAR画像を補正する。画像補正部52は、補正後のISAR画像を目標類別部53及び表示処理部54へ出力する。
【0024】
表示処理部54は、画像補正部52から複数のISAR画像を受け取り、これらのISAR画像を表示部80に表示させる。ユーザは、表示部80に表示された複数のISAR画像から、特徴点が明瞭なISAR画像を選択する。このとき、ユーザは、入力部70から選択指示を入力する。表示処理部54は、ユーザからの選択指示を受け取り、表示部80に、ユーザにより選択されたISAR画像のみを表示させる。また、ユーザは、表示部80に表示されたISAR画像に基づき、ドプラ周波数が大きいマスト等の特徴点又はドプラ周波数の変化が大きい艦橋等の特徴点から二点を指定する。このとき、ユーザは、入力部70から指定指示を入力する。
【0025】
また、表示処理部54は、目標類別部53からの画像データを受け取った場合、この画像データを、ユーザにより選択されたISAR画像と並べて表示部80に表示させる。
【0026】
目標類別部53は、特徴点設定部531、再計算部532及び類似度判定部533を備える。
【0027】
特徴点設定部531は、画像補正部52から複数のISAR画像を受ける。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する。そして、特徴点設定部531は、このISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受ける。特徴点設定部531は、ユーザから指定された二点の指定特徴点の間の距離を基準距離とする。そして、特徴点設定部531は、指定特徴点間以外の特徴点間の距離を基準距離に対する相対距離で表した基準相対位置情報を生成する。特徴点設定部531は、生成した基準相対位置情報を類似度判定部533へ出力する。また、特徴点設定部531は、指定指示の入力後に、類似度判定の開始指示が入力された場合、類似度判定を開始する旨を再計算部532へ通知する。なお、特徴点設定部531は、入力部70からの特徴点の指定があった場合、類似度判定を開始する旨を再計算部532へ通知するようにしても構わない。
【0028】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択し、この指定構造物間の距離を第1の指定距離とする。そして、再計算部532は、指定構造物間以外の構造物間の距離を第1の指定距離に対する相対距離で表した第1の相対位置情報サンプルを生成する。
【0029】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この指定構造物間の距離を第2の指定距離とする。そして、再計算部532は、指定構造物間以外の構造物間の距離を第2の指定距離に対する相対距離で表した第2の相対位置情報サンプルを生成する。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数の相対位置情報サンプルを生成する。
【0030】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数の相対位置情報サンプルを生成する。
【0031】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数の相対位置情報サンプルを生成する。再計算部532は、生成した複数の相対位置情報サンプルを類似度判定部533へ出力する。
【0032】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受け取る。類似度判定部533は、基準相対位置情報と、複数の相対位置情報サンプルとを比較し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0033】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルを選択し、選択した相対位置情報サンプルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533による相対位置情報サンプルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超える相対位置情報サンプルを選択するようにしても構わない。
【0034】
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図3は、本発明の第1の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0035】
まず、ISAR画像生成部51は、図4に示すISAR画像を生成する。画像補正部52は、図4に示すISAR画像における軸を検出し、検出した軸の傾きが水平となるように、ISAR画像を補正する。補正後のISAR画像を図5に示す。画像補正部52は、補正後のISAR画像を目標類別部53及び表示処理部54へ出力する。表示処理部54は、画像補正部52から複数のISAR画像を受け取り、これらを表示部80に表示させる。そして、表示処理部54は、複数のISAR画像のうち、ユーザから選択指示のあったISAR画像を継続して表示部80に表示させる。
【0036】
図3において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS31)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS32)。
【0037】
続いて、特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS33)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する(シーケンスS34)。
【0038】
例えば、特徴点設定部531は、図5に示すISAR画像における特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間の距離を基準距離とする。そして、特徴点設定部531は、特徴点2と特徴点3との間の距離を、基準距離を100%とした場合の割合で表し、図6に示す基準相対位置情報を生成する。
【0039】
特徴点設定部531は、生成した基準相対位置情報を類似度判定部533へ出力する(シーケンスS35)。
【0040】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS36)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS37)。
【0041】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS38)、それぞれの目標形状情報に基づいて複数の相対位置情報サンプルを生成する(シーケンスS39)。
【0042】
例えば、図7(a)に示す目標形状情報があるとする。本目標形状情報において、船首から構造物1までは距離L1であり、構造物1から構造物2までは距離L2であり、構造物2から構造物3までは距離L3であり、構造物3から船尾までは距離L4である。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この指定構造物間の距離L2を第1の指定距離とする。再計算部532は、距離L1,L3,L4を、第1の指定距離L2を100%とした場合の割合(距離L1’,L3’,L4’)でそれぞれ表し、図7(b)に示す相対位置情報サンプル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の距離L3を第2の指定距離とする。再計算部532は、距離L1,L2,L4を、第2の指定距離L3を100%とした場合の割合(距離L1’’,L2’’,L4’’)でそれぞれ表し、図7(c)に示す相対位置情報サンプル2を生成する。
【0043】
再計算部532は、生成した複数の相対位置情報サンプルを類似度判定部533へ出力する(シーケンスS310)。
【0044】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する(シーケンスS311)。
【0045】
例えば、類似度判定部533は、図8に示すように、図6に示す基準相対位置情報の特徴点1乃至特徴点3に正規分布のウェイトをかけ、基準相対位置情報の基準距離と、図7(b),(c)に示す相対位置情報サンプル1,2の指定距離とを揃える。そして、類似度判定部533は、相対位置情報サンプル1,2における構造物が、基準相対位置情報における特徴点の正規分布のどこに位置するかにより、基準相対位置情報に対する相対位置情報サンプル1,2の類似度を測定する。図8では、相対位置情報サンプル1の方が、相対位置情報サンプル2よりも類似度が高いこととなる。
【0046】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルを選択し(シーケンスS312)、選択した相対位置情報サンプルの元となる目標形状情報を記憶部60から読み出す(シーケンスS313)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS314)。
【0047】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0048】
以上のように、上記第1の実施形態において、特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。これにより、ISAR画像中の特徴点間の距離を、基準距離に対する相対距離で表すことが可能となる。また、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択するようにしている。これにより、基準相対位置情報と相対位置情報サンプルとを比較することで、目標と類似する目標形状情報をユーザへ提示することが可能となる。すなわち、特徴点間の絶対長を測定せずとも、目標を類別するための目標形状情報をユーザに対して提示することが可能となる。また、本実施形態においては、特徴点間の絶対長を測定する必要がないため、目標のアスペクト角を算出する必要がない。
【0049】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することができる。
【0050】
[第2の実施形態]
本発明の第2の実施形態に係るレーダ装置は、第1の実施形態に係るレーダ装置と同様の構成をしており、ここでは異なる部分について説明する。
【0051】
記憶部60は、目標形状情報が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報と、構造物の高さ情報等とのデータが含まれている。
【0052】
目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、以下の処理を行う。
【0053】
特徴点設定部531は、ISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受けた場合、ユーザから指定された二点の指定特徴点のドプラ周波数の差を基準差とする。そして、特徴点設定部531は、指定特徴点間以外の特徴点間のドプラ周波数の差を基準差に対する相対差で表した基準相対差情報を生成する。特徴点設定部531は、生成した基準相対差情報を類似度判定部533へ出力する。
【0054】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択する。再計算部532は、第1の目標形状情報における構造物の高さ情報を参照し、指定した二つの指定構造物の高度差を第1の指定高度差とする。そして、再計算部532は、指定構造物間以外の構造物間の高度差を第1の指定高度差に対する相対高度差で表した第1の相対高度差情報サンプルを生成する。
【0055】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この二つの指定構造物の高度差を第2の指定高度差とする。そして、再計算部532は、指定構造物間以外の構造物間の高度を第2の指定高度差に対する相対高度差で表した第2の相対高度差情報サンプルを生成する。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数の相対高度差情報サンプルを生成する。
【0056】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数の相対高度差情報サンプルを生成する。
【0057】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数の相対高度差情報サンプルを生成する。再計算部532は、生成した複数の相対高度差情報サンプルを類似度判定部533へ出力する。
【0058】
類似度判定部533は、特徴点設定部531からの基準相対差情報と、再計算部532からの複数の相対高度差情報サンプルとを受け取る。類似度判定部533は、基準相対差情報と、複数の相対高度差情報サンプルとを比較し、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0059】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つの相対高度差情報サンプルを選択し、選択した相対高度差情報サンプルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533による相対高度差情報サンプルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超える相対高度差情報サンプルを選択するようにしても構わない。
【0060】
表示処理部54は、第1の実施形態で示される処理により取得された目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づいて取得された目標形状情報とを、表示部80に表示させる。
【0061】
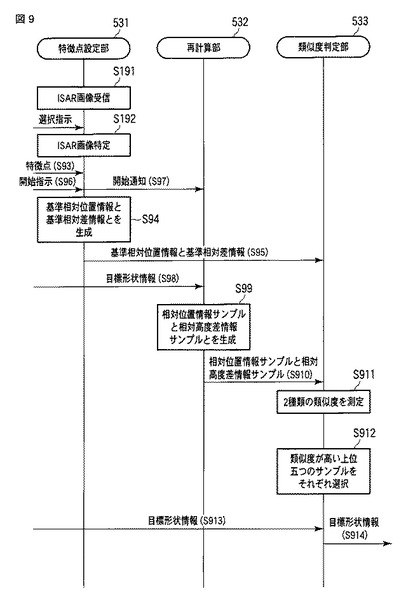
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図9は、本発明の第2の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0062】
図9において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS91)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS92)。
【0063】
特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS93)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する。また、特徴点設定部531は、二点の指定特徴点の間の高度差を基準差とし、基準相対差情報を生成する(シーケンスS94)。
【0064】
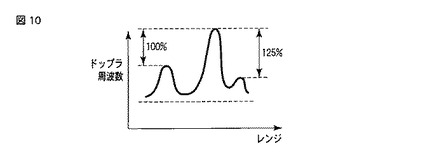
例えば、特徴点設定部531は、図5に示すISAR画像に対して、特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間のドップラ周波数の差を基準差とする。特徴点設定部531は、特徴点2と特徴点3との間の差を、基準差を100%とした場合の割合で表し、図10に示す基準相対差情報を生成する。
【0065】
特徴点設定部531は、基準相対位置情報及び基準相対差情報を類似度判定部533へ出力する(シーケンスS95)。
【0066】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS96)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS97)。
【0067】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS98)、それぞれの目標形状情報に基づいて、複数の相対位置情報サンプルと、複数の相対高度差情報サンプルとを生成する(シーケンスS99)。
【0068】
例えば、図11(a)に示す目標形状情報があるとする。本目標形状情報において、構造物1と構造物2との高度差は高度差H1であり、構造物2と構造物3との高度差は高度差H2である。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この二つの指定構造物の高度差H1を第1の指定高度差とする。再計算部532は、高度差H2を、第1の指定高度差H1を100%とした場合の割合(高度差H2’)で表し、図11(b)に示す相対高度差情報サンプル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の高度差H2を第2の指定高度差とする。再計算部532は、高度差H1を、第2の指定高度差H2を100%とした場合の割合(高度差H1’)で表し、図11(c)に示す相対高度差情報サンプル2を生成する。
【0069】
再計算部532は、複数の相対位置情報サンプルと、複数の相対高度差情報サンプルとを類似度判定部533へ出力する(シーケンスS910)。
【0070】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。また、類似度判定部533は、特徴点設定部531からの基準相対差情報と、再計算部532からの複数の相対高度差情報サンプルとを受信し、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を測定する(シーケンスS911)。
【0071】
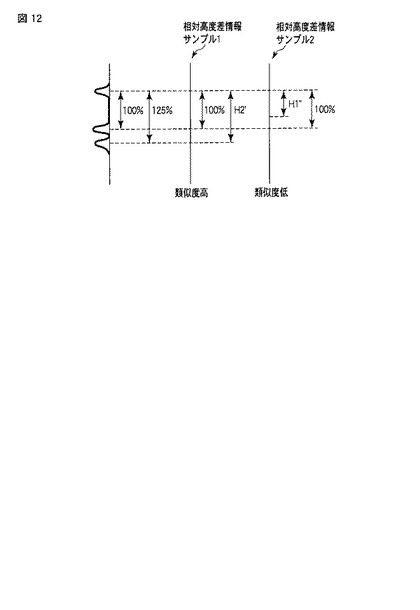
例えば、類似度判定部533は、図12に示すように、図10に示す基準相対差情報の特徴点1乃至特徴点3に正規分布のウェイトをかけ、基準相対差情報の基準差と、図11(b),(c)に示す相対高度差情報サンプル1,2の指定高度差とを揃える。そして、類似度判定部533は、相対高度差情報サンプル1,2が、基準相対差情報の正規分布のどこに位置するかにより、基準相対差情報に対する相対高度差情報サンプル1,2の類似度を測定する。図12では、相対高度差情報サンプル1の方が、相対高度差情報サンプル2よりも類似度が高いこととなる。
【0072】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルと、類似度が高い複数の、例えば、上位五つの相対高度差情報サンプルとを選択し(シーケンスS912)、選択した相対位置情報サンプルと、選択した相対高度差情報サンプルとの元となる目標形状情報を記憶部60から読み出す(シーケンスS913)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS914)。
【0073】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0074】
以上のように、上記第2の実施形態において、特徴点設定部531は、二つの指定特徴点間の基準差に基づき、取得したISAR画像から基準相対差情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対高度差情報サンプルを生成する。類似度判定部533は、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を算出する。そして、類似度判定部533は、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報とを表示部80に表示させるようにしている。つまり、表示部80には、2種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。これにより、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報に加え、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0075】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0076】
[第3の実施形態]
本発明の第3の実施形態に係るレーダ装置は、第1の実施形態に係るレーダ装置と同様の構成をしており、ここでは異なる部分について説明する。
【0077】
記憶部60は、目標形状情報が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報と、構造物の高さ情報等とのデータが含まれている。
【0078】
目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、以下の処理を行う。
【0079】
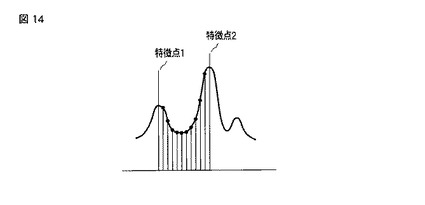
特徴点設定部531は、ISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受けた場合、ユーザから指定された二点の指定特徴点の間のドップラ周波数の数値を所定のポイント数分だけ測定する。特徴点設定部531は、所定のポイント数分のドップラ周波数の数値を基準ベクトルとして類似度判定部533へ出力する。
【0080】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択する。再計算部532は、第1の目標形状情報における構造物の高さ情報を参照し、指定した指定構造物間の高度を所定のポイント数分だけ抽出する。再計算部532は、所定のポイント数分の高度を第1のサンプルベクトルとする。
【0081】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この指定構造物間の高度を所定ポイント数分だけ抽出する。再計算部532は、所定のポイント数分の高度を第2のサンプルベクトルとする。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数のサンプルベクトルを生成する。
【0082】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数のサンプルベクトルを生成する。
【0083】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数のサンプルベクトルを生成する。再計算部532は、生成した複数のサンプルベクトルを類似度判定部533へ出力する。
【0084】
類似度判定部533は、特徴点設定部531からの基準ベクトルと、再計算部532からの複数のサンプルベクトルとを受け取る。類似度判定部533は、基準ベクトルと、複数のサンプルベクトルとを比較し、基準ベクトルに対する複数のサンプルベクトルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0085】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つのサンプルベクトルを選択し、選択したサンプルベクトルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533によるサンプルベクトルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超えるサンプルベクトルを選択するようにしても構わない。
【0086】
表示処理部54は、第1の実施形態で示される処理により取得された目標形状情報と、基準ベクトルに対する複数のサンプルベクトルの類似度に基づいて取得された目標形状情報とを、表示部80に表示させる。
【0087】
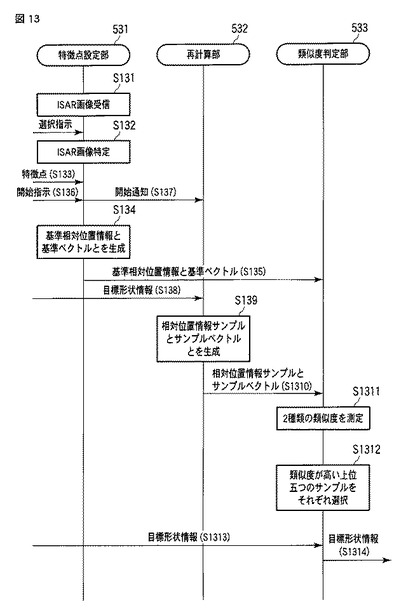
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図13は、本発明の第3の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0088】
図13において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS131)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS132)。
【0089】
特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS133)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する。また、特徴点設定部531は、二点の指定特徴点の間のドップラ周波数を所定のポイント数分だけ測定し、基準ベクトルを生成する(シーケンスS134)。
【0090】
例えば、特徴点設定部531は、図14に示すように、図5に示すISAR画像に対して、特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間のドップラ周波数を所定のポイント数分だけ測定し、基準ベクトルを生成する。
【0091】
特徴点設定部531は、基準相対位置情報及び基準ベクトルを類似度判定部533へ出力する(シーケンスS135)。
【0092】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS136)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS137)。
【0093】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS138)、それぞれの目標形状情報に基づいて複数の相対位置情報サンプルと、複数のサンプルベクトルとを生成する(シーケンスS139)。
【0094】
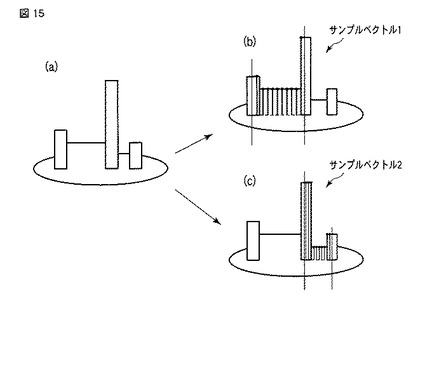
例えば、図15(a)に示す目標形状情報があるとする。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この指定構造物間の高度を所定のポイント数分だけ抽出し、図15(b)に示すサンプルベクトル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の高度を所定のポイント数分だけ抽出し、図15(c)に示すサンプルベクトル2を生成する。
【0095】
再計算部532は、複数の相対位置情報サンプルと、複数のサンプルベクトルとを類似度判定部533へ出力する(シーケンスS1310)。
【0096】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。また、類似度判定部533は、特徴点設定部531からの基準ベクトルと、再計算部532からの複数のサンプルベクトルとを受信し、基準ベクトルに対する複数のサンプルベクトルの類似度を測定する。(シーケンスS1311)。
【0097】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルと、類似度が高い複数の、例えば、上位五つの基準ベクトルとを選択し(シーケンスS1312)、選択した相対位置情報サンプルの元となる目標形状情報と、選択した基準ベクトルの元となる目標形状情報とを記憶部60から読み出す(シーケンスS1313)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS1314)。
【0098】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0099】
以上のように、上記第3の実施形態において、特徴点設定部531は、二つの指定特徴点間のドップラ周波数を測定し、基準ベクトルを生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数のサンプルベクトルを生成する。類似度判定部533は、基準ベクトルに対する複数のサンプルベクトルの類似度を算出する。そして、類似度判定部533は、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報とを表示部80に表示させるようにしている。つまり、表示部80には、2種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。これにより、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報に加え、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0100】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0101】
なお、上記第3の実施形態では、目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、上述の処理を行っているが、第1の実施形態での処理及び第2の実施形態での処理に加え、上述の処理を行うようにしても構わない。これにより、表示部80には、3種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。つまり、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報とに加え、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0102】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0103】
[その他の実施形態]
なお、上記各実施形態では、画像修正部52により、ISAR画像における軸が水平となるようにISAR画像を補正する例について説明したが、上記各実施形態はこれに限定される訳ではない。例えば、上記各実施形態では、ISAR画像を補正しなくても実施可能である。
【0104】
さらに、上記各実施形態は、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記各実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0105】
10…送信機
20…サーキュレータ
30…アンテナ
40…受信機
50…信号処理器
51…ISAR画像生成部
52…画像補正部
53…目標類別部
531…特徴点設定部
532…再計算部
533…類似度判定部
54…表示処理部
60…記憶部
70…入力部
80…表示部
【技術分野】
【0001】
この発明は、目標からのレーダエコーから作成される逆合成開口レーダ(ISAR:Inverse Synthetic Aperture Radar)画像を用いて目標を類別するレーダ装置、目標類別装置及び目標類別プログラムに関する。
【背景技術】
【0002】
レーダエコーから作成されるISAR画像を用いて目標の類別を行う処理では、ISAR画像に含まれる目標と予めデータベースに記憶されている目標形状情報とを模擬・照合する手法、或いは、ISAR画像及び目標形状情報の双方からそれぞれ複数の特徴点を抽出し、対応するそれぞれの特徴点を照合する手法が取られている。
【0003】
ところで、上記従来の方法では、ISAR画像における目標の一部が欠落している場合又は不鮮明である場合、類別結果を取得するためには、目標の構造物間の絶対長を測定する必要がある(例えば、特許文献1参照)。なお、目標の一部が欠落している場合又は不鮮明である場合とは、船舶を例にすると、船首及び船尾のうち少なくともいずれか一方が欠落している場合又は不鮮明である場合のことである。
【0004】
目標の構造物間の絶対長を測定するためには、レーダの追尾機能により目標のアスペクト角を算出し、ISAR画像上の船首又は船尾を判別する。そして、ISAR画像上のレンジの距離に基づき、船首又は船尾から特徴点までの絶対長を算出している。しかしながら、アスペクト角の算出の精度は高くなく、精度を上げようとすると時間がかかるという問題がある。そのため、目標の構造物間の絶対長を精度良く測定することは困難であり、したがって、ISAR画像における目標の一部が欠落している場合又は不鮮明である場合には、良好な類別結果を取得することが困難である。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−157012号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
以上のように、従来のレーダ装置では、ISAR画像における目標の一部が欠落している場合等に、良好な類別結果を取得するためには、目標の構造物間の絶対長を精度良く測定することが求められる。しかし、目標のアスペクト角を精度良く算出するには時間がかかり、目標の構造物間の絶対長を精度良く測定することは困難であるという問題がある。
【0007】
この発明は上記事情によりなされたもので、その目的は、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係るレーダ装置は、レーダエコーに基づいてISAR画像を生成するレーダ装置において、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する再計算部と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と、前記選択された第1の目標形状情報を表示する表示部とを具備する。
【0009】
また、本発明に係る目標類別装置は、レーダエコーに基づいてISAR画像を生成するレーダ装置で用いられる目標類別装置において、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを、前記指定構造物毎に生成する再計算部と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部とを具備する。
【0010】
また、本発明に係る目標類別プログラムは、レーダエコーに基づいて目標のISAR画像を生成する画像生成部と、前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部とを具備するレーダ装置で用いられる目標類別プログラムであって、前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を生成する基準情報生成処理と、前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する相対情報生成処理と、前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算処理とを前記レーダ装置のコンピュータに実行させることを特徴とする。
【0011】
上記構成によるレーダ装置、目標類別装置及び目標類別プログラムでは、特徴点設定部は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部は、記憶部に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。そして、類似度判定部により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、類似度の高いサンプルの元となった目標形状情報を選択する。これにより、ISAR画像中の特徴点間の距離を基準距離に対する相対距離で表すことが可能となり、目標と類似する目標形状情報をユーザに提示することが可能となる。すなわち、特徴点間の絶対長を測定せずとも、目標を類別するための目標形状情報をユーザに対して提示することが可能となる。
【発明の効果】
【0012】
この発明によれば、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することが可能なレーダ装置、目標類別装置及び目標類別プログラムを提供することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。
【図2】図1の信号処理器の機能構成を示すブロック図である。
【図3】図2の目標類別部における目標類別処理のシーケンス図を示す図である。
【図4】図2のISAR画像生成部で生成されるISAR画像の一例を示す図である。
【図5】図2の画像補正部で補正されたISAR画像の一例を示す図である。
【図6】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成される相対位置情報サンプルの一例を示す図である。
【図7】図2の特徴点設定部で生成される基準相対位置情報の一例を示す図である。
【図8】図2の類似度判定部における類似度判定処理の一例を示す図である。
【図9】第2の実施形態における図2の目標類別部による目標類別処理のシーケンス図を示す図である。
【図10】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成される相対高度差情報サンプルの一例を示す図である。
【図11】図2の特徴点設定部で生成される基準相対差情報の一例を示す図である。
【図12】図2の類似度判定部における類似度判定処理の一例を示す図である。
【図13】第3の実施形態における図2の目標類別部による目標類別処理のシーケンス図を示す図である。
【図14】図1の記憶部に記憶される目標形状情報の一例及び図2の再計算部で生成されるサンプルベクトルの一例を示す図である。
【図15】図2の特徴点設定部で生成される基準ベクトルの一例を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照しながら本発明に係るレーダ装置、目標類別装置及び目標類別プログラムの実施の形態について詳細に説明する。
【0015】
[第1の実施形態]
図1は、本発明の第1の実施形態に係るレーダ装置の機能構成を示すブロック図である。図1におけるレーダ装置は、送信機10、サーキュレータ20、アンテナ30、受信機40、信号処理器50、記憶部60、入力部70及び表示部80を具備する。
【0016】
送信機10は、所定の送信周期でRF信号を生成し、生成したRF信号をサーキュレータ20を介してアンテナ30から空間へ送信する。アンテナ30から送信された送信波の一部は、目標で反射され、反射エコーとしてアンテナ30により受信される。
【0017】
サーキュレータ20は、送受信信号を分離するための循環回路である。すなわち、サーキュレータ20は、送信機10が生成したRF信号をアンテナ30へ供給し、アンテナ30で受信した反射エコーを受信信号として受信機40へ供給する。
【0018】
受信機40は、送信機10がRF信号を生成する送信周期に基づいて受信信号から反射エコーを判別し、レーダビデオ信号を生成する。受信機40は、生成したレーダビデオ信号を信号処理器50へ出力する。
【0019】
記憶部60は、レーダ装置による捕獲が想定される種々の目標の形状、具体的には種々の船舶の形状に関する情報(以下、目標形状情報と称する)が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報等とのデータが含まれている。
【0020】
入力部70は、レーダ装置のユーザから操作指示を受ける。入力部70から入力された操作指示は、信号処理器50へ供給される。表示部80は、LCD(Liquid Crystal Display)等を備え、信号処理器50で処理された信号を表示する。ユーザは、表示部80に表示される画像に基づいて、目標を類別する。
【0021】
図2は、本発明の一実施形態に係る信号処理器50の機能構成を示すブロック図である。図2における信号処理器50は、例えば、CPU(Central Processing Unit)のみならず、ROM(Read Only Memory)、RAM(Random Access Memory)等のCPUが処理を実行するためのプログラムやデータの格納領域等を含んでいる。信号処理器50は、格納領域に格納されている目標類別プログラムをCPUで実行することで以下の構成を備える。すなわち、信号処理器50は、ISAR画像生成部51、画像補正部52、目標類別部53及び表示処理部54を備える。
【0022】
ISAR画像生成部51は、受信機40で生成されたレーダビデオ信号を受け取り、ISAR画像を生成する。ISAR画像生成部51は、生成したISAR画像を画像補正部52へ出力する。
【0023】
画像補正部52は、ISAR画像生成部51で生成したISAR画像における軸を検出する。画像補正部52は、検出した軸の傾きが水平となるように、ISAR画像を補正する。画像補正部52は、補正後のISAR画像を目標類別部53及び表示処理部54へ出力する。
【0024】
表示処理部54は、画像補正部52から複数のISAR画像を受け取り、これらのISAR画像を表示部80に表示させる。ユーザは、表示部80に表示された複数のISAR画像から、特徴点が明瞭なISAR画像を選択する。このとき、ユーザは、入力部70から選択指示を入力する。表示処理部54は、ユーザからの選択指示を受け取り、表示部80に、ユーザにより選択されたISAR画像のみを表示させる。また、ユーザは、表示部80に表示されたISAR画像に基づき、ドプラ周波数が大きいマスト等の特徴点又はドプラ周波数の変化が大きい艦橋等の特徴点から二点を指定する。このとき、ユーザは、入力部70から指定指示を入力する。
【0025】
また、表示処理部54は、目標類別部53からの画像データを受け取った場合、この画像データを、ユーザにより選択されたISAR画像と並べて表示部80に表示させる。
【0026】
目標類別部53は、特徴点設定部531、再計算部532及び類似度判定部533を備える。
【0027】
特徴点設定部531は、画像補正部52から複数のISAR画像を受ける。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する。そして、特徴点設定部531は、このISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受ける。特徴点設定部531は、ユーザから指定された二点の指定特徴点の間の距離を基準距離とする。そして、特徴点設定部531は、指定特徴点間以外の特徴点間の距離を基準距離に対する相対距離で表した基準相対位置情報を生成する。特徴点設定部531は、生成した基準相対位置情報を類似度判定部533へ出力する。また、特徴点設定部531は、指定指示の入力後に、類似度判定の開始指示が入力された場合、類似度判定を開始する旨を再計算部532へ通知する。なお、特徴点設定部531は、入力部70からの特徴点の指定があった場合、類似度判定を開始する旨を再計算部532へ通知するようにしても構わない。
【0028】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択し、この指定構造物間の距離を第1の指定距離とする。そして、再計算部532は、指定構造物間以外の構造物間の距離を第1の指定距離に対する相対距離で表した第1の相対位置情報サンプルを生成する。
【0029】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この指定構造物間の距離を第2の指定距離とする。そして、再計算部532は、指定構造物間以外の構造物間の距離を第2の指定距離に対する相対距離で表した第2の相対位置情報サンプルを生成する。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数の相対位置情報サンプルを生成する。
【0030】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数の相対位置情報サンプルを生成する。
【0031】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数の相対位置情報サンプルを生成する。再計算部532は、生成した複数の相対位置情報サンプルを類似度判定部533へ出力する。
【0032】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受け取る。類似度判定部533は、基準相対位置情報と、複数の相対位置情報サンプルとを比較し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0033】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルを選択し、選択した相対位置情報サンプルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533による相対位置情報サンプルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超える相対位置情報サンプルを選択するようにしても構わない。
【0034】
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図3は、本発明の第1の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0035】
まず、ISAR画像生成部51は、図4に示すISAR画像を生成する。画像補正部52は、図4に示すISAR画像における軸を検出し、検出した軸の傾きが水平となるように、ISAR画像を補正する。補正後のISAR画像を図5に示す。画像補正部52は、補正後のISAR画像を目標類別部53及び表示処理部54へ出力する。表示処理部54は、画像補正部52から複数のISAR画像を受け取り、これらを表示部80に表示させる。そして、表示処理部54は、複数のISAR画像のうち、ユーザから選択指示のあったISAR画像を継続して表示部80に表示させる。
【0036】
図3において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS31)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS32)。
【0037】
続いて、特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS33)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する(シーケンスS34)。
【0038】
例えば、特徴点設定部531は、図5に示すISAR画像における特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間の距離を基準距離とする。そして、特徴点設定部531は、特徴点2と特徴点3との間の距離を、基準距離を100%とした場合の割合で表し、図6に示す基準相対位置情報を生成する。
【0039】
特徴点設定部531は、生成した基準相対位置情報を類似度判定部533へ出力する(シーケンスS35)。
【0040】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS36)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS37)。
【0041】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS38)、それぞれの目標形状情報に基づいて複数の相対位置情報サンプルを生成する(シーケンスS39)。
【0042】
例えば、図7(a)に示す目標形状情報があるとする。本目標形状情報において、船首から構造物1までは距離L1であり、構造物1から構造物2までは距離L2であり、構造物2から構造物3までは距離L3であり、構造物3から船尾までは距離L4である。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この指定構造物間の距離L2を第1の指定距離とする。再計算部532は、距離L1,L3,L4を、第1の指定距離L2を100%とした場合の割合(距離L1’,L3’,L4’)でそれぞれ表し、図7(b)に示す相対位置情報サンプル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の距離L3を第2の指定距離とする。再計算部532は、距離L1,L2,L4を、第2の指定距離L3を100%とした場合の割合(距離L1’’,L2’’,L4’’)でそれぞれ表し、図7(c)に示す相対位置情報サンプル2を生成する。
【0043】
再計算部532は、生成した複数の相対位置情報サンプルを類似度判定部533へ出力する(シーケンスS310)。
【0044】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する(シーケンスS311)。
【0045】
例えば、類似度判定部533は、図8に示すように、図6に示す基準相対位置情報の特徴点1乃至特徴点3に正規分布のウェイトをかけ、基準相対位置情報の基準距離と、図7(b),(c)に示す相対位置情報サンプル1,2の指定距離とを揃える。そして、類似度判定部533は、相対位置情報サンプル1,2における構造物が、基準相対位置情報における特徴点の正規分布のどこに位置するかにより、基準相対位置情報に対する相対位置情報サンプル1,2の類似度を測定する。図8では、相対位置情報サンプル1の方が、相対位置情報サンプル2よりも類似度が高いこととなる。
【0046】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルを選択し(シーケンスS312)、選択した相対位置情報サンプルの元となる目標形状情報を記憶部60から読み出す(シーケンスS313)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS314)。
【0047】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0048】
以上のように、上記第1の実施形態において、特徴点設定部531は、二つの指定特徴点間の基準距離に基づき、取得したISAR画像から基準相対位置情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対位置情報サンプルを生成する。これにより、ISAR画像中の特徴点間の距離を、基準距離に対する相対距離で表すことが可能となる。また、類似度判定部533により、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を算出し、算出した類似度に基づいた目標形状情報を選択するようにしている。これにより、基準相対位置情報と相対位置情報サンプルとを比較することで、目標と類似する目標形状情報をユーザへ提示することが可能となる。すなわち、特徴点間の絶対長を測定せずとも、目標を類別するための目標形状情報をユーザに対して提示することが可能となる。また、本実施形態においては、特徴点間の絶対長を測定する必要がないため、目標のアスペクト角を算出する必要がない。
【0049】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、ISAR画像における目標の一部が欠落している場合等において、目標の構造物間の絶対長を測定しなくても良好な類別結果を取得することができる。
【0050】
[第2の実施形態]
本発明の第2の実施形態に係るレーダ装置は、第1の実施形態に係るレーダ装置と同様の構成をしており、ここでは異なる部分について説明する。
【0051】
記憶部60は、目標形状情報が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報と、構造物の高さ情報等とのデータが含まれている。
【0052】
目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、以下の処理を行う。
【0053】
特徴点設定部531は、ISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受けた場合、ユーザから指定された二点の指定特徴点のドプラ周波数の差を基準差とする。そして、特徴点設定部531は、指定特徴点間以外の特徴点間のドプラ周波数の差を基準差に対する相対差で表した基準相対差情報を生成する。特徴点設定部531は、生成した基準相対差情報を類似度判定部533へ出力する。
【0054】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択する。再計算部532は、第1の目標形状情報における構造物の高さ情報を参照し、指定した二つの指定構造物の高度差を第1の指定高度差とする。そして、再計算部532は、指定構造物間以外の構造物間の高度差を第1の指定高度差に対する相対高度差で表した第1の相対高度差情報サンプルを生成する。
【0055】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この二つの指定構造物の高度差を第2の指定高度差とする。そして、再計算部532は、指定構造物間以外の構造物間の高度を第2の指定高度差に対する相対高度差で表した第2の相対高度差情報サンプルを生成する。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数の相対高度差情報サンプルを生成する。
【0056】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数の相対高度差情報サンプルを生成する。
【0057】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数の相対高度差情報サンプルを生成する。再計算部532は、生成した複数の相対高度差情報サンプルを類似度判定部533へ出力する。
【0058】
類似度判定部533は、特徴点設定部531からの基準相対差情報と、再計算部532からの複数の相対高度差情報サンプルとを受け取る。類似度判定部533は、基準相対差情報と、複数の相対高度差情報サンプルとを比較し、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0059】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つの相対高度差情報サンプルを選択し、選択した相対高度差情報サンプルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533による相対高度差情報サンプルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超える相対高度差情報サンプルを選択するようにしても構わない。
【0060】
表示処理部54は、第1の実施形態で示される処理により取得された目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づいて取得された目標形状情報とを、表示部80に表示させる。
【0061】
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図9は、本発明の第2の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0062】
図9において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS91)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS92)。
【0063】
特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS93)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する。また、特徴点設定部531は、二点の指定特徴点の間の高度差を基準差とし、基準相対差情報を生成する(シーケンスS94)。
【0064】
例えば、特徴点設定部531は、図5に示すISAR画像に対して、特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間のドップラ周波数の差を基準差とする。特徴点設定部531は、特徴点2と特徴点3との間の差を、基準差を100%とした場合の割合で表し、図10に示す基準相対差情報を生成する。
【0065】
特徴点設定部531は、基準相対位置情報及び基準相対差情報を類似度判定部533へ出力する(シーケンスS95)。
【0066】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS96)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS97)。
【0067】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS98)、それぞれの目標形状情報に基づいて、複数の相対位置情報サンプルと、複数の相対高度差情報サンプルとを生成する(シーケンスS99)。
【0068】
例えば、図11(a)に示す目標形状情報があるとする。本目標形状情報において、構造物1と構造物2との高度差は高度差H1であり、構造物2と構造物3との高度差は高度差H2である。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この二つの指定構造物の高度差H1を第1の指定高度差とする。再計算部532は、高度差H2を、第1の指定高度差H1を100%とした場合の割合(高度差H2’)で表し、図11(b)に示す相対高度差情報サンプル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の高度差H2を第2の指定高度差とする。再計算部532は、高度差H1を、第2の指定高度差H2を100%とした場合の割合(高度差H1’)で表し、図11(c)に示す相対高度差情報サンプル2を生成する。
【0069】
再計算部532は、複数の相対位置情報サンプルと、複数の相対高度差情報サンプルとを類似度判定部533へ出力する(シーケンスS910)。
【0070】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。また、類似度判定部533は、特徴点設定部531からの基準相対差情報と、再計算部532からの複数の相対高度差情報サンプルとを受信し、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を測定する(シーケンスS911)。
【0071】
例えば、類似度判定部533は、図12に示すように、図10に示す基準相対差情報の特徴点1乃至特徴点3に正規分布のウェイトをかけ、基準相対差情報の基準差と、図11(b),(c)に示す相対高度差情報サンプル1,2の指定高度差とを揃える。そして、類似度判定部533は、相対高度差情報サンプル1,2が、基準相対差情報の正規分布のどこに位置するかにより、基準相対差情報に対する相対高度差情報サンプル1,2の類似度を測定する。図12では、相対高度差情報サンプル1の方が、相対高度差情報サンプル2よりも類似度が高いこととなる。
【0072】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルと、類似度が高い複数の、例えば、上位五つの相対高度差情報サンプルとを選択し(シーケンスS912)、選択した相対位置情報サンプルと、選択した相対高度差情報サンプルとの元となる目標形状情報を記憶部60から読み出す(シーケンスS913)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS914)。
【0073】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0074】
以上のように、上記第2の実施形態において、特徴点設定部531は、二つの指定特徴点間の基準差に基づき、取得したISAR画像から基準相対差情報を生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数の相対高度差情報サンプルを生成する。類似度判定部533は、基準相対差情報に対する複数の相対高度差情報サンプルの類似度を算出する。そして、類似度判定部533は、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報とを表示部80に表示させるようにしている。つまり、表示部80には、2種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。これにより、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報に加え、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0075】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0076】
[第3の実施形態]
本発明の第3の実施形態に係るレーダ装置は、第1の実施形態に係るレーダ装置と同様の構成をしており、ここでは異なる部分について説明する。
【0077】
記憶部60は、目標形状情報が予め格納されている。船舶の目標形状情報には、船舶の全長と、艦橋及びマスト等の構造物の位置情報と、構造物の高さ情報等とのデータが含まれている。
【0078】
目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、以下の処理を行う。
【0079】
特徴点設定部531は、ISAR画像に含まれる艦橋及びマスト等の複数の特徴点に対し、入力部70から指定指示を受けた場合、ユーザから指定された二点の指定特徴点の間のドップラ周波数の数値を所定のポイント数分だけ測定する。特徴点設定部531は、所定のポイント数分のドップラ周波数の数値を基準ベクトルとして類似度判定部533へ出力する。
【0080】
再計算部532は、類似度判定を開始する旨の通知を受けると、記憶部60に記憶された複数の目標形状情報のうち、第1の目標形状情報を読み出す。再計算部532は、第1の目標形状情報における構造物の位置情報を参照し、第1の目標形状情報に含まれる複数の構造物のうち二つの指定構造物を選択する。再計算部532は、第1の目標形状情報における構造物の高さ情報を参照し、指定した指定構造物間の高度を所定のポイント数分だけ抽出する。再計算部532は、所定のポイント数分の高度を第1のサンプルベクトルとする。
【0081】
続いて、再計算部532は、第1の目標形状情報に含まれる複数の構造物のうち、少なくとも一方が上述の指定構造物とは異なる二つの指定構造物を選択し、この指定構造物間の高度を所定ポイント数分だけ抽出する。再計算部532は、所定のポイント数分の高度を第2のサンプルベクトルとする。再計算部532は、第1の目標形状情報に含まれる全ての構造物に対して上述の処理を行い、第1の目標形状情報について複数のサンプルベクトルを生成する。
【0082】
また、再計算部532は、記憶部60から第2の目標形状情報を読み出し、第2の目標形状情報についても第1の目標形状情報と同様の処理を行う。すなわち、再計算部532は、第2の目標形状情報について複数のサンプルベクトルを生成する。
【0083】
再計算部532は、記憶部60に記憶されている全ての目標形状情報に対して上述の処理を行うことで、記憶部60に記憶されている全ての目標形状情報についての複数のサンプルベクトルを生成する。再計算部532は、生成した複数のサンプルベクトルを類似度判定部533へ出力する。
【0084】
類似度判定部533は、特徴点設定部531からの基準ベクトルと、再計算部532からの複数のサンプルベクトルとを受け取る。類似度判定部533は、基準ベクトルと、複数のサンプルベクトルとを比較し、基準ベクトルに対する複数のサンプルベクトルの類似度を測定する。なお、ここでの類似度の測定では、公知の類似度測定方法のうちいずれの方法が採用されても構わない。
【0085】
類似度判定部533は、測定した類似度のうち、類似度が高い複数の、例えば、上位五つのサンプルベクトルを選択し、選択したサンプルベクトルの元となる目標形状情報を表示処理部54へ出力する。なお、類似度判定部533によるサンプルベクトルの選択は、類似度の高い上位五つに限定されるわけではなく、その他の方法により選択されても構わない。例えば、予め設定された類似度を超えるサンプルベクトルを選択するようにしても構わない。
【0086】
表示処理部54は、第1の実施形態で示される処理により取得された目標形状情報と、基準ベクトルに対する複数のサンプルベクトルの類似度に基づいて取得された目標形状情報とを、表示部80に表示させる。
【0087】
次に、以上のように構成されたレーダ装置による目標類別処理を、目標類別部53の処理手順に従い説明する。図13は、本発明の第3の実施形態に係る目標類別部53における目標類別処理のシーケンス図を示す図である。
【0088】
図13において、特徴点設定部531は、画像補正部52から複数のISAR画像を受信する(シーケンスS131)。特徴点設定部531は、入力部70からの選択信号に応じて、複数のISAR画像のうち一つのISAR画像を特定する(シーケンスS132)。
【0089】
特徴点設定部531は、入力部70から二点の指定特徴点の指定指示が入力されると(シーケンスS133)、二点の指定特徴点の間の距離を基準距離とし、基準相対位置情報を生成する。また、特徴点設定部531は、二点の指定特徴点の間のドップラ周波数を所定のポイント数分だけ測定し、基準ベクトルを生成する(シーケンスS134)。
【0090】
例えば、特徴点設定部531は、図14に示すように、図5に示すISAR画像に対して、特徴点1乃至特徴点3のうち特徴点1及び特徴点2を指定特徴点とし、この指定特徴点間のドップラ周波数を所定のポイント数分だけ測定し、基準ベクトルを生成する。
【0091】
特徴点設定部531は、基準相対位置情報及び基準ベクトルを類似度判定部533へ出力する(シーケンスS135)。
【0092】
また、特徴点設定部531は、指定特徴点の指定指示の後に開始指示を受けると(シーケンスS136)、類似度判定を開始する旨を再計算部532へ通知する(シーケンスS137)。
【0093】
再計算部532は、特徴点設定部531から通知があると、記憶部60から複数の目標形状情報を読み出し(シーケンスS138)、それぞれの目標形状情報に基づいて複数の相対位置情報サンプルと、複数のサンプルベクトルとを生成する(シーケンスS139)。
【0094】
例えば、図15(a)に示す目標形状情報があるとする。再計算部532は、構造物1〜3のうち、構造物1及び構造物2を指定構造物とし、この指定構造物間の高度を所定のポイント数分だけ抽出し、図15(b)に示すサンプルベクトル1を生成する。また、再計算部532は、構造物1〜3のうち、構造物2及び構造物3を指定構造物とし、この指定構造物間の高度を所定のポイント数分だけ抽出し、図15(c)に示すサンプルベクトル2を生成する。
【0095】
再計算部532は、複数の相対位置情報サンプルと、複数のサンプルベクトルとを類似度判定部533へ出力する(シーケンスS1310)。
【0096】
類似度判定部533は、特徴点設定部531からの基準相対位置情報と、再計算部532からの複数の相対位置情報サンプルとを受信し、基準相対位置情報に対する複数の相対位置情報サンプルの類似度を測定する。また、類似度判定部533は、特徴点設定部531からの基準ベクトルと、再計算部532からの複数のサンプルベクトルとを受信し、基準ベクトルに対する複数のサンプルベクトルの類似度を測定する。(シーケンスS1311)。
【0097】
類似度判定部533は、類似度が高い複数の、例えば、上位五つの相対位置情報サンプルと、類似度が高い複数の、例えば、上位五つの基準ベクトルとを選択し(シーケンスS1312)、選択した相対位置情報サンプルの元となる目標形状情報と、選択した基準ベクトルの元となる目標形状情報とを記憶部60から読み出す(シーケンスS1313)。そして、類似度判定部533は、読み出した目標形状情報を表示処理部54へ出力する(シーケンスS1314)。
【0098】
表示処理部54は、類似度判定部533からの目標形状情報を表示部80に表示させる。
【0099】
以上のように、上記第3の実施形態において、特徴点設定部531は、二つの指定特徴点間のドップラ周波数を測定し、基準ベクトルを生成する。また、再計算部532は、記憶部60に記憶された複数の目標形状情報に基づいて、複数のサンプルベクトルを生成する。類似度判定部533は、基準ベクトルに対する複数のサンプルベクトルの類似度を算出する。そして、類似度判定部533は、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報とを表示部80に表示させるようにしている。つまり、表示部80には、2種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。これにより、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報に加え、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0100】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0101】
なお、上記第3の実施形態では、目標類別部53に含まれる特徴点設定部531、再計算部532及び類似度判定部533は、第1の実施形態での処理に加え、上述の処理を行っているが、第1の実施形態での処理及び第2の実施形態での処理に加え、上述の処理を行うようにしても構わない。これにより、表示部80には、3種類の類似度に基づいて取得された複数の目標形状情報がそれぞれ表示される。つまり、ユーザは、基準相対位置情報に対する複数の相対位置情報サンプルの類似度に基づく目標形状情報と、基準相対差情報に対する複数の相対高度差情報サンプルの類似度に基づく目標形状情報とに加え、基準ベクトルに対する複数のサンプルベクトルの類似度に基づく目標形状情報によっても目標の類別を行うことが可能となる。
【0102】
したがって、本実施形態に係るレーダ装置、目標類別装置及び目標類別プログラムによれば、より精度の高い類別結果を得ることが可能となる。
【0103】
[その他の実施形態]
なお、上記各実施形態では、画像修正部52により、ISAR画像における軸が水平となるようにISAR画像を補正する例について説明したが、上記各実施形態はこれに限定される訳ではない。例えば、上記各実施形態では、ISAR画像を補正しなくても実施可能である。
【0104】
さらに、上記各実施形態は、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記各実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0105】
10…送信機
20…サーキュレータ
30…アンテナ
40…受信機
50…信号処理器
51…ISAR画像生成部
52…画像補正部
53…目標類別部
531…特徴点設定部
532…再計算部
533…類似度判定部
54…表示処理部
60…記憶部
70…入力部
80…表示部
【特許請求の範囲】
【請求項1】
レーダエコーに基づいてISAR(Inverse Synthetic Aperture Radar)画像を生成するレーダ装置において、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する再計算部と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と、
前記選択された第1の目標形状情報を表示する表示部と
を具備することを特徴とするレーダ装置。
【請求項2】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択し、
前記表示部は、前記選択された第2の目標形状情報をさらに表示することを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択し、
前記表示部は、前記選択された第3の目標形状情報をさらに表示することを特徴とする請求項1及び2のいずれかに記載のレーダ装置。
【請求項4】
前記ISAR画像の傾きを補正し、補正後の前記ISAR画像を前記特徴点設定部へ供給する画像補正部をさらに具備することを特徴とする請求項1乃至3のいずれかに記載のレーダ装置。
【請求項5】
レーダエコーに基づいてISAR画像を生成するレーダ装置で用いられる目標類別装置において、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを、前記指定構造物毎に生成する再計算部と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と
を具備することを特徴とする目標類別装置。
【請求項6】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択することを特徴とする請求項5記載の目標類別装置。
【請求項7】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択することを特徴とする請求項5及び6のいずれかに記載の目標類別装置。
【請求項8】
前記ISAR画像の傾きを補正し、補正後の前記ISAR画像を前記特徴点設定部へ供給する画像補正部をさらに具備することを特徴とする請求項5乃至7のいずれかに記載の目標類別装置。
【請求項9】
レーダエコーに基づいて目標のISAR画像を生成する画像生成部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と
を具備するレーダ装置で用いられる目標類別プログラムであって、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を生成する基準情報生成処理と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する相対情報生成処理と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算処理と
を前記レーダ装置のコンピュータに実行させることを特徴とする目標類別プログラム。
【請求項10】
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記基準情報生成処理では、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記相対情報生成処理では、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算処理では、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択することを特徴とする請求項9記載の目標類別プログラム。
【請求項11】
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記基準情報生成処理では、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記相対情報生成処理では、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算処理では、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択することを特徴とする請求項9及び10のいずれかに記載の目標類別プログラム。
【請求項1】
レーダエコーに基づいてISAR(Inverse Synthetic Aperture Radar)画像を生成するレーダ装置において、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する再計算部と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と、
前記選択された第1の目標形状情報を表示する表示部と
を具備することを特徴とするレーダ装置。
【請求項2】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択し、
前記表示部は、前記選択された第2の目標形状情報をさらに表示することを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択し、
前記表示部は、前記選択された第3の目標形状情報をさらに表示することを特徴とする請求項1及び2のいずれかに記載のレーダ装置。
【請求項4】
前記ISAR画像の傾きを補正し、補正後の前記ISAR画像を前記特徴点設定部へ供給する画像補正部をさらに具備することを特徴とする請求項1乃至3のいずれかに記載のレーダ装置。
【請求項5】
レーダエコーに基づいてISAR画像を生成するレーダ装置で用いられる目標類別装置において、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を作成する特徴点設定部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを、前記指定構造物毎に生成する再計算部と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算部と
を具備することを特徴とする目標類別装置。
【請求項6】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択することを特徴とする請求項5記載の目標類別装置。
【請求項7】
前記特徴設定部は、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記再計算部は、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算部は、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択することを特徴とする請求項5及び6のいずれかに記載の目標類別装置。
【請求項8】
前記ISAR画像の傾きを補正し、補正後の前記ISAR画像を前記特徴点設定部へ供給する画像補正部をさらに具備することを特徴とする請求項5乃至7のいずれかに記載の目標類別装置。
【請求項9】
レーダエコーに基づいて目標のISAR画像を生成する画像生成部と、
前記目標となり得る種々の物体の形状に関する複数の目標形状情報であって、前記複数の目標形状情報は前記種々の物体のうちいずれかの物体が有する複数の構造物の位置情報を含む目標形状情報を予め記憶する記憶部と
を具備するレーダ装置で用いられる目標類別プログラムであって、
前記ISAR画像における複数の特徴点のうち指定された二つの指定特徴点間の距離を基準距離とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間の距離を前記基準距離に対する相対距離で表す基準相対位置情報を生成する基準情報生成処理と、
前記位置情報に基づき、前記複数の構造物のうち任意の二つの指定構造物を順次指定し、前記二つの指定構造物間の距離を指定距離とし、前記指定構造物以外の構造物間の距離を前記指定距離に対する相対距離で表す相対位置情報サンプルを前記指定構造物毎に生成する相対情報生成処理と、
前記基準相対位置情報に対する前記複数の相対位置情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対位置情報サンプルの元となる第1の目標形状情報を選択する類似度計算処理と
を前記レーダ装置のコンピュータに実行させることを特徴とする目標類別プログラム。
【請求項10】
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記基準情報生成処理では、前記二つの指定特徴点間のドップラ周波数の差を基準差とし、前記ISAR画像に基づいて、前記指定特徴点以外の特徴点間のドップラ周波数の差を前記基準差に対する相対差で表す基準相対差情報をさらに作成し、
前記相対情報生成処理では、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度差を指定高度差とし、前記指定構造物以外の構造物間の高度差を前記指定高度差に対する相対高度差で表す相対高度差情報サンプルを前記指定構造物毎にさらに生成し、
前記類似度計算処理では、前記基準相対差情報に対する前記複数の相対高度差情報サンプルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高い相対高度差情報サンプルの元となる第2の目標形状情報をさらに選択することを特徴とする請求項9記載の目標類別プログラム。
【請求項11】
前記複数の目標形状情報は、前記種々の物体のうちいずれかの物体が有する複数の構造物の高さ情報をさらに含み、
前記基準情報生成処理では、前記二つの指定特徴点間のドップラ周波数を予め設定したポイント数分だけ測定し、前記測定したドップラ周波数に基づいて基準ベクトルをさらに作成し、
前記相対情報生成処理では、前記高さ情報に基づき、前記複数の構造物のうち任意の二つの指定構造物間の高度を前記ポイント数分だけ抽出し、前記抽出した高度に基づくサンプルベクトルを前記指定構造物毎にさらに生成し、
前記類似度計算処理では、前記基準ベクトルに対する前記複数のサンプルベクトルの類似度を測定し、前記複数の目標形状情報のうち、前記類似度の高いサンプルベクトルの元となる第3の目標形状情報をさらに選択することを特徴とする請求項9及び10のいずれかに記載の目標類別プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−247777(P2011−247777A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−121958(P2010−121958)
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月27日(2010.5.27)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]