
レーダ装置、路側器及び車載装置
【課題】探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置を提供する。
【解決手段】レーダ装置1は、第1の偏波面を持つ探知波を放射する送信アンテナ4と、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナ(5−1)と、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナ(5−2)と、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部(9)とを有する。
【解決手段】レーダ装置1は、第1の偏波面を持つ探知波を放射する送信アンテナ4と、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナ(5−1)と、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナ(5−2)と、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部(9)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、探知波を放射してその探知波についての反射波を検出することにより、探知波を反射した物体を検知するレーダ装置、及びそのようなレーダ装置を備えた路側器及び車載装置に関する。
【背景技術】
【0002】
従来より、交通事故の発生を防止して、より安全な交通環境を実現するための技術の研究が行われている。そのような技術において、道路上を走行する車両が、その車両の周囲に存在する他の車両を検出し、または他の車両までの距離を測定することが有用である。他の車両の存在を検知したり、あるいは他の車両までの距離を求めることにより、例えば、車両に搭載された運転支援装置は、必要な場合にドライバに対して警告を行って、衝突などの危険を回避させることができる。
そこで、例えば、レーダ装置を用いて、他の車両の位置などを検出する技術が開発されている。例えば、偏波面の異なる二つの指向性空中線により受信された受信信号の和分成分と差分成分を求め、その和分成分と差分成分の差に基づいて、電波発射源の方位及び位置を探知する技術が提案されている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−338212号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
交通事故の発生を防止するために、二輪車のような小型の車両を高精度で検知することが重要である。例えば、左折しようとする車両が、その車両の後方から接近してくる二輪車を検知できれば、いわゆる巻き込み事故の発生を防止できる可能性が高くなる。あるいは、右折しようと交差点で待機している車両が、その車両のドライバの死角に存在し、かつ前方から接近する二輪車を検知できれば、いわゆる右直事故の発生を防止できる可能性が高くなる。
しかし、小型の車両については、探知波を反射する面積が小さい。そこで、リフレクタのようにレーダ装置から放射された探知波を効率よく反射する器具を、検知対象である小型の車両に取り付けることにより、レーダ装置が受信可能な、小型の車両による反射波の強度を大きくできる。
一方、トラック、バスといった大型車両については、探知波を反射する面積が大きいので、大型の車両で反射され、レーダ装置で受信される反射波の強度は、リフレクタによる反射波の強度と同程度またはそれ以上となることがある。そのため、レーダ装置は、探知波を反射した物体がリフレクタを搭載した車両か否かを識別できないおそれがあった。
【0005】
そこで本明細書は、探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置、及びそのようなレーダ装置が組み込まれた路側器及び車載装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
一つの実施形態によれば、レーダ装置が提供される。このレーダ装置は、第1の偏波面を持つ探知波を放射する送信アンテナと、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部とを有する。
【0007】
また他の実施形態によれば、道路上に存在する物体を検知する路側器が提供される。この路側器は、第1の偏波面を持つ探知波を道路に向けて放射する送信アンテナと、探知波が道路上に存在する物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が道路上に存在する物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部とを有するレーダ装置と、レーダ装置により検知された物体及びその物体が反射部材を搭載した車両か否かを表す判定結果とを含む検知情報を生成する制御部と、検知情報を含む通知信号を所定の通信可能範囲内に存在する通信機へ送信するアンテナとを有する。
【0008】
さらに他の実施形態によれば、車両に搭載される車載装置が提供される。この車載装置は、第1の偏波面を持つ探知波を放射する送信アンテナと、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部とを有するレーダ装置と、レーダ装置により検知された物体が反射部材を搭載した車両か否かを表す判定結果を含む検知情報と警告情報との関係を表す参照テーブルを参照して所定の警告情報を特定する制御部と、特定された警告情報を車両に搭載された他の機器へ出力するインターフェース部とを有する。
【0009】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0010】
本明細書に開示されたレーダ装置、路側器及び車載装置は、探知波を反射した物体が特定の反射部材か否かを識別することができる。
【図面の簡単な説明】
【0011】
【図1】一つの実施形態によるレーダ装置の概略構成図である。
【図2】偏波面回転リフレクタ搭載車両からの反射波とその他の車両からの反射波を表す概略図である。
【図3】偏波面回転リフレクタ搭載車両からの反射波の強度の測定値と大型車からの反射波の強度の測定値の一例を表すグラフである。
【図4】物体検知処理の動作フローチャートを示す。
【図5】一つの実施形態によるレーダ装置が組み込まれた路側器の概略図である。
【図6】一つの実施形態によるレーダ装置が組み込まれた物体検知用車載装置の概略図である。
【発明を実施するための形態】
【0012】
以下、図を参照しつつ、一つの実施形態による、レーダ装置について説明する。
反射部材であるリフレクタの一例として、所定方向の偏波面を持つ直線偏波を反射することにより、その偏波面を所定角度回転させるリフレクタが知られている。以下では、そのようなリフレクタを偏波面回転リフレクタと呼ぶ。
偏波面回転リフレクタは、例えば、二つの平板状の金属板を、互いに対して90°をなすように設け、かつ、その二つの金属板が接する線に直交する線を、探知波の偏波面に対して所定角度の1/2だけ傾けるように配置したコーナーリフレクタとすることができる。
あるいは、偏波面回転リフレクタは、3個の略三角形状の平板状金属板を貼り合わせた三面コーナーリフレクタに対して、その三面コーナーリフレクタの開口部に、直線状スリットが形成された金属板を取り付けたものであってもよい。
【0013】
このような偏波面回転リフレクタが検知対象の物体に取り付けられているとする。このような場合、レーダ装置から出力された直線偏波である探知波が物体により反射された反射波のうち、偏波面回転リフレクタにより反射された反射波の偏波面は、それ以外の物体により反射された反射波の偏波面と異なる可能性が高い。そのため、レーダ装置は、探知波の偏波面に対して上記の所定角度回転した偏波面を持つ反射波を検知することで、探知波を反射した物体が検知対象物体か否かを識別できると想定される。
しかし、発明者は、鋭意研究の結果、トラック、バスといった大型車両による反射波も、偏波面回転リフレクタによる反射波と同様に、偏波面が回転した成分を有するという知見を得た。そのような大型車両は探知波を反射可能な様々な面を持つため、それらの面で探知波が複数回反射されることによって偏波面が回転すると推定される。
【0014】
そこで、発明者は、探知波を反射した物体が、偏波面回転リフレクタか、あるいは大型車両などの他の物体かを精度良く識別可能なレーダ装置を開発した。このレーダ装置は、直線偏波である探知波を出力する送信アンテナと、探知波の偏波面と同方向の偏波面を持つ反射波を検知する第1の受信アンテナと、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を検知する第2の受信アンテナを有する。そしてこのレーダ装置は、第2の受信アンテナにより検知された反射波の信号電力と、第1の受信アンテナにより検知された反射波の信号電力との比に基づいて、探知波を反射した物体が偏波面回転リフレクタか否かを識別する。
【0015】
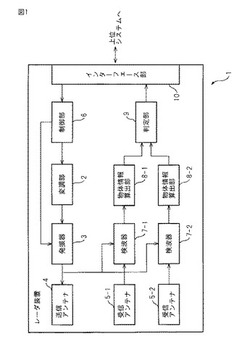
図1は、一つの実施形態によるレーダ装置の概略構成図である。本実施形態では、レーダ装置1は、周波数変調連続波(frequency modulated continuous wave、fmcw)方式により、探知波を反射した物体を検知する。そのために、レーダ装置1は、変調部2と、発振器3と、送信アンテナ4と、受信アンテナ5−1、5−2と、制御部6と、検波器7−1、7−2と、物体情報算出部8−1、8−2と、判定部9と、インターフェース部10とを有する。
変調部2、発振器3、制御部6、検波器7−1、7−2、物体情報算出部8−1、8−2及び判定部9は、それぞれ、別個の演算回路であってもよく、あるいは、それらの機能を実行する一つの集積回路として、レーダ装置1に実装されてもよい。
【0016】
変調部2は、制御部6からの制御信号に従って、所定の周期で周波数が直線的な増加と減少を繰り返すアナログの周波数変調信号を生成する。そのために、変調部2は、例えば、ダイレクトデジタル周波数シンセサイザを有する。例えば、変調部2は、制御信号によって検出する物体までの距離についての解像度が短く設定される場合、例えば、約1mの解像度が得られるように、(1/500MHz)の周期で出力する信号の周波数を変化させる。また変調部2は、制御信号によって探知範囲が広く設定される場合、(1/250MHz)よりも長い周期で出力する信号の周波数を変化させる。
そして変調部2は、周波数変調信号を発振器3へ出力する。
【0017】
発振器3は、変調部2からの周波数変調信号を、ミリ波に相当する所定の中心周波数を持つfmcw信号に変換する。そのために、発振器3は、例えば、位相同期回路を有する。あるいは、発振器3は、所定の局部発振周波数を持つ周期信号を出力する局部発振器と、その周期信号と変調部2からの周波数変調信号とをミキシングするミキサとを有してもよい。さらに発振器3は、fmcw信号を増幅するための増幅器を有してもよい。なお、中心周波数は、例えば、30GHz〜300GHzの範囲内に含まれる何れかの周波数とすることができる。
また発振器3は、制御部6からの制御信号に従ってfmcw信号の電力を調整してもよい。
発振器3から出力されたfmcw信号は、分配器(図示せず)を介して、送信アンテナ4及び検波器7−1、7−2へ伝達される。
【0018】
送信アンテナ4は、発振器3から受け取ったfmcw信号を、所定方向の偏波面を持つ直線偏波であり、かつレーダ波である探知波として、所定の方向へ向けて放射する。そのために、送信アンテナ4は、例えば、ホーンアンテナ、ダイポールアンテナ、あるいはアレイアンテナとすることができる。また本実施形態では、探知波の偏波面が水平方向となるように、送信アンテナ4は配置される。しかし探知波の偏波面は、水平方向に限定されず、例えば、鉛直方向、あるいは水平面に対して45°をなす方向に沿っていてもよい。
【0019】
受信アンテナ5−1、5−2は、送信アンテナ4から放射され、何れかの物体で反射された探知波である反射波を受信する。特に、受信アンテナ5−1は、探知波の偏波面と同じ偏波面を持つ反射波の直線偏波成分を受信するように配置される。一方、受信アンテナ5−2は、探知波の偏波面に対して所定の角度回転した偏波面を持つ反射波の直線偏波成分を受信するように配置される。本実施形態では、所定の角度は90°に設定される。しかし、所定の角度は90°に限定されない。所定の角度は、偏波面回転リフレクタにより偏波面が回転された反射波のうち、探知波の偏波面に直交する偏波面の成分の方が探知波の偏波面と同じ偏波面の成分よりも大きくなるように、例えば、45°〜135°の範囲内であればよい。このように所定の角度が設定されることにより、レーダ装置1は、偏波面回転リフレクタによって偏波面が回転した反射波の信号電力を、偏波面を回転させない物体で反射された反射波の信号電力と区別することが容易となる。
【0020】
受信アンテナ5−1、5−2は、それぞれ、例えば、ホーンアンテナ、ダイポールアンテナ、あるいはアレイアンテナとすることができる。そして例えば、送信アンテナ4及び受信アンテナ5−1、5−2がダイポールアンテナである場合、受信アンテナ5−1が有する2本のアンテナの長手方向が、送信アンテナ4が有する2本のアンテナの長手方向と平行となるように受信アンテナ5−1は配置される。一方、受信アンテナ5−2が有する2本のアンテナの長手方向が、送信アンテナ4が有する2本のアンテナの長手方向と直交するように受信アンテナ5−2は配置される。
【0021】
受信アンテナ5−1は、受信した反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−1へ出力する。一方、受信アンテナ5−2は、受信した反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−2へ出力する。
【0022】
制御部6は、レーダ装置1全体を制御する。また制御部6は、送信アンテナ4から放射される探知波を、レーダ装置1の周囲の状況に応じて調整するよう、発振器3及び変調部2を調整する。そのために、制御部6は、プロセッサ及び周辺回路を有する。
例えば、制御部6は、上位システム(図示せず)からインターフェース部10を介して、探知波を制御するための情報を含む信号を受け取る。例えば、制御部6は、そのような信号として、レーダ装置1が設置された場所の現在の天候を表す天候情報を含む信号を受け取る。そして天候情報が、現在の天候が雨天あるいは降雪であることを示していれば、制御部6は、発振器3に対して、現在の天候が晴天あるいは曇天である場合よりもfmcw信号の電力を大きくする制御信号を送信する。このように、制御部6は、雨天あるいは降雪といった、探知波が遠方まで届き難い天候である場合に送信アンテナ4から放射される探知波の電力を大きくすることで、検知対象物体を確実に検知できるようにする。一方、制御部6は、晴天あるいは曇天といった、探知波が遠方まで届き易い天候である場合に送信アンテナ4から放射される探知波の電力を小さくすることで、レーダ装置1の消費電力を抑制できる。
【0023】
またレーダ装置1が車両に搭載されている場合、制御部6は、探知波を制御するための情報を含む信号として、例えば、レーダ装置1が搭載された車両の速度情報を含む信号を受け取る。そして制御部6は、その車両が停止している場合、あるいは例えば時速10km/h以下といった低速で移動している場合、変調部2へ、距離方向の解像度を高くするために、探知波を変調する周期を短くすることを示す制御信号を送信する。一方、レーダ装置1が搭載された車両の速度が、例えば、時速10km/hよりも速い場合、制御部6は、探知範囲を広く設定するように、変調部2へ、探知波を変調する周期を長くすることを示す制御信号を送信する。
【0024】
検波器7−1は、受信アンテナ5−1にて受信された、探知波の偏波面と同じ偏波面を持つ反射波に対応する受信信号と、発振器3から出力されたfmcw信号とを乗じる。そして検波器7−1は、fmcw信号において周波数が高くなる上り区間と周波数が低くなる下り区間のそれぞれについて、反射波の周波数とfmcw信号の周波数との差を表すビート信号を生成する。
そのために、検波器7−1は、受信アンテナ5−1にて受信された反射波に対応する受信信号とfmcw信号を乗じるミキサを有する。
同様に、検波器7−2は、受信アンテナ5−2にて受信された、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波に対応する受信信号と、発振器3から出力されたfmcw信号とを乗じることにより上り区間と下り区間のそれぞれのビート信号を生成する。
また検波器7−1、7−2は、それぞれ、ミキサにより生成されたビート信号をデジタル信号に変換するアナログ/デジタル変換器を有する。さらに検波器7−1、7−2は、それぞれ、受信信号を増幅する増幅器を有してもよい。
検波器7−1、7−2は、それぞれ、生成した上り区間及び下り区間のビート信号を物体情報算出部8−1、8−2へ出力する。
【0025】
物体情報算出部8−1、8−2は、それぞれ、検波器7−1、7−2から受け取った上り区間及び下り区間のビート信号に基づいて、探知波を反射した物体のレーダ装置1に対する相対的な移動速度及びその物体とレーダ装置1間の距離を算出する。
例えば、物体情報算出部8−1、8−2は、上り区間のビート信号を高速フーリエ変換してピーク周波数を検出することにより、上り区間における反射波の周波数fupを求める。また物体情報算出部8−1、8−2は、下り区間のビート信号を高速フーリエ変換してピーク周波数を検出することにより、下り区間における反射波の周波数fdownを求める。そして物体情報算出部8−1、8−2は、それぞれ、次式に従って、検知された物体までの距離D及び検知された物体の相対速度Vを算出する。
【数1】

ここで、cは光速を表し、Tは探知波の変調周期を表す。またf0は探知波の中心周波数を表し、Δfは、探知波の周波数変動幅を表す。
そして物体情報算出部8−1、8−2は、それぞれ、検知された物体までの距離及び検知された物体の相対速度を判定部9へ出力する。
また物体情報算出部8−1、8−2は、それぞれ、検波器7−1、7−2から受け取ったビート信号に基づいて、受信アンテナ5−1、5−2により受信された反射波の信号電力を求め、その信号電力を判定部9へ出力する。
【0026】
判定部9は、例えば、プロセッサと、揮発性または不揮発性のメモリとを有する。そして判定部9は、探知波の偏波面と同じ偏波面を持つ反射波の信号電力と、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力との比に基づいて、探知波を反射した物体が、偏波面回転リフレクタが搭載された車両か否か判定する。
【0027】
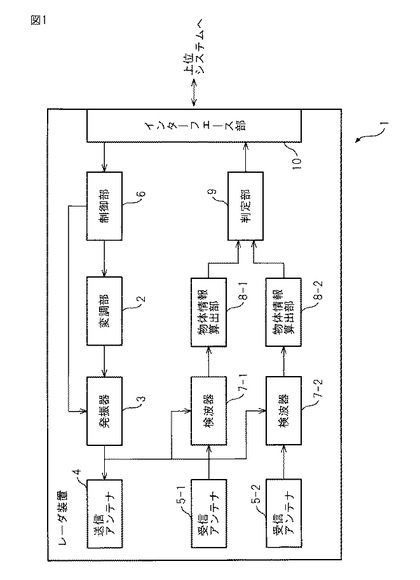
図2は、偏波面回転リフレクタ搭載車両からの反射波とその他の車両からの反射波を表す概略図である。
図2において、車両201は、偏波面回転リフレクタ201aを搭載している。一方、普通車202及び大型車203は、偏波面回転リフレクタを搭載していない。
レーダ装置1から放射された探知波が車両201に搭載された偏波面回転リフレクタ201aにより反射されると、その反射波の偏波面は探知波の偏波面に対して所定角度回転する。そのため、レーダ装置1では、探知波の偏波面に対して偏波面が所定角度回転した反射波の信号電力が、探知波の偏波面と同じ偏波面を持つ反射波の信号電力よりも大きくなる。
一方、レーダ装置1から放射された探知波が普通車両202により反射されると、その反射波の偏波面は回転しない。そのため、レーダ装置1では、探知波の偏波面と同じ偏波面を持つ反射波の信号電力が、探知波の偏波面に対して偏波面が所定角度回転した反射波の信号電力よりも大きくなる。
また、レーダ装置1から放射された探知波が大型車両203により反射された反射波の大部分の偏波面は回転しない。しかし、大型車両203は、探知波を反射可能な複数の面を有するため、反射波の一部の偏波面は、探知波の偏波面に対して所定角度回転する。そのため、レーダ装置1は、探知波の偏波面と同じ偏波面を持つ反射波と、探知波の偏波面に対して偏波面が所定角度回転した反射波の両方を検知できる。
【0028】
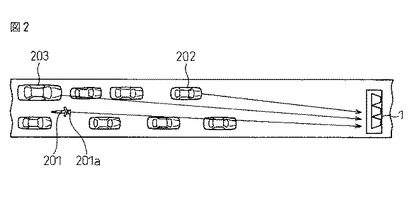
図3は、偏波面回転リフレクタ搭載車両からの反射波の強度の測定値と大型車からの反射波の強度の測定値の一例を表すグラフである。このグラフにおいて、横軸はレーダ装置1と探知波を反射した物体間の距離を表し、縦軸は、レーダ装置1にて受信した反射波の強度を表す。そしてグラフ301は、偏波面回転リフレクタ搭載車両による反射波のうち、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度を表す。またグラフ302は、偏波面回転リフレクタ搭載車両による反射波のうち、探知波の偏波面と同じ偏波面を持つ成分の信号強度を表す。一方、グラフ311は、大型車両による反射波のうち、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度を表す。またグラフ312は、大型車両による反射波のうち、探知波の偏波面と同じ偏波面を持つ成分の信号強度を表す。
図3に示されるように、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度について、大型車両による反射波の信号強度の方が、偏波面回転リフレクタ搭載車両による反射波の信号強度よりも大きい。そのため、レーダ装置は、反射波の信号強度そのものに基づいて、探知波を反射した物体が偏波面回転リフレクタか否かを正確に判定することは困難である。
しかし、大型車両については、探知波の偏波面と同じ偏波面を持つ反射波の成分の信号強度が、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の成分の信号強度よりも大きい。これに対して、偏波面回転リフレクタ搭載車両については、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の成分の信号強度が探知波の偏波面と同じ偏波面を持つ反射波の成分の信号強度よりも大きい。
【0029】
そこで判定部9は、探知波の偏波面と同一の偏波面を持つ反射波の信号電力よりも探知波の偏波面に対して所定角度回転した反射波の信号電力が大きい場合、探知波を反射した物体は偏波面回転リフレクタであると判定する。すなわち、判定部9は、偏波面回転リフレクタ搭載車両を検知する。一方、判定部9は、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力が探知波の偏波面と同一の偏波面を持つ反射波の信号電力以下である場合、検知された物体はそのようなリフレクタを搭載しない車両、例えば、大型車両であると判定する。
判定部9は、検知した物体の判定結果を、インターフェース部10を介して、上位システムへ出力する。また判定部9は、受信アンテナ5−1、5−2で受信した反射波の信号電力のうち、大きい方の信号電力に対応する物体情報算出部にて算出された相対速度及び距離を、インターフェース部10を介して、上位システムへ出力する。
【0030】
なお、受信アンテナ5−1で受信された反射波を反射した物体と、受信アンテナ5−2で受信された反射波を反射した物体とが異なることがある。そこで判定部9は、受信アンテナ5−1で受信した反射波に基づいて算出された、レーダ装置1と探知波を反射した物体間の距離D1と、受信アンテナ5−2で受信した反射波に基づいて算出された、レーダ装置1と探知波を反射した物体間の距離D2とを比較する。そして判定部9は、距離D1とD2の差の絶対値が、同一の車両と推定される所定の閾値(例えば、2m)未満である場合に限り、探知波を反射した物体が偏波面回転リフレクタか否かの判定を行ってもよい。一方、距離D1とD2の差の絶対値が、その所定の閾値以上離れている場合、判定部9は、受信アンテナ5−1で受信した反射波を反射した物体は、受信アンテナ5−2で受信した反射波を反射した物体と異なると判定する。
【0031】
あるいは、判定部9は、距離D1とD2との差だけでなく、受信アンテナ5−1、5−2で受信した反射波に基づいてそれぞれ算出された相対速度V1とV2間の差に基づいて、各受信アンテナで受信した反射波を反射した物体が同一物体か否かを判定してもよい。この場合、判定部9は、距離D1とD2との差の絶対値が所定の距離未満であり、かつ、相対速度V1と相対速度V2との差の絶対値が、相対速度V1とV2が同一速度とみなせる所定値未満の場合に、各受信アンテナで受信した反射波を反射した物体は同一であると判定する。そして判定部9は、探知波を反射した物体がリフレクタ搭載車両か否かの判定を行う。
判定部9は、各受信アンテナで受信した反射波が、異なる物体により反射された反射波であると判定した場合、各反射波に対応する距離D1、D2及び相対速度V1、V2を、インターフェース部10を介して、上位システムへ出力する。
【0032】
インターフェース部10は、レーダ装置1を通信ネットワークを介して上位システムと接続するためのインターフェース回路を有する。そしてインターフェース部10は、判定部9から受け取った、検知された物体の判定結果及びその物体までの距離及び相対的な移動速度を上位システムへ出力する。
またインターフェース部10は、上位システムから受け取った、探知波を制御するための情報を制御部6へ伝達する。
【0033】
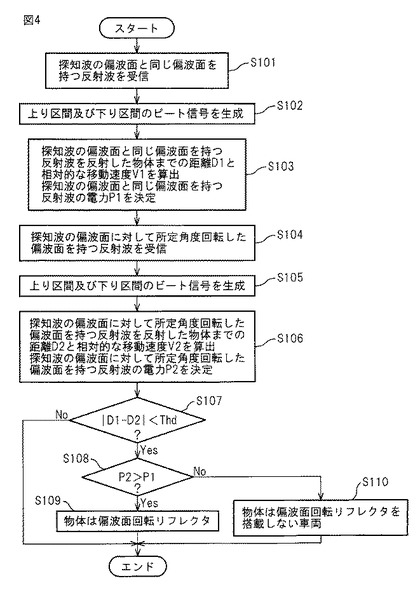
図4は、レーダ装置1により実行される物体検知処理の動作フローチャートを示す。なお、この物体検知処理は、一定周期(例えば、1msec周期または10msec周期)で繰り返し実行される。
受信アンテナ5−1は、送信アンテナ4から放射された探知波の偏波面と同じ偏波面を持つ反射波を受信する(ステップS101)。そして受信アンテナ5−1は、反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−1へ出力する。
検波器7−1は、反射波と探知波に相当するfmcw信号をミキシングすることにより、上り区間と下り区間のビート信号を生成する(ステップS102)。検波器7−1は、上り区間と下り区間のビート信号を物体情報算出部8−1へ出力する。
物体情報算出部8−1は、レーダ装置1から探知波の偏波面と同じ偏波面を持つ反射波を反射した物体までの距離D1と、レーダ装置1に対するその物体の相対的な移動速度V1を算出する。また物体情報算出部8−1は、ビート信号に基づいて、受信アンテナ5−1で受信された反射波の信号電力P1を求める(ステップS103)。そして物体情報算出部8−1は、信号電力P1、距離D1及び相対的な移動速度V1を判定部9へ出力する。
【0034】
一方、受信アンテナ5−2は、送信アンテナ4から放射された探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を受信する(ステップS104)。そして受信アンテナ5−2は、反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−2へ出力する。
検波器7−2は、反射波と探知波に相当するfmcw信号をミキシングすることにより、上り区間と下り区間のビート信号を生成する(ステップS105)。検波器7−2は、上り区間と下り区間のビート信号を物体情報算出部8−2へ出力する。
物体情報算出部8−2は、レーダ装置1から探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を反射した物体までの距離D2と、レーダ装置1に対するその物体の相対的な移動速度V2を算出する。また物体情報算出部8−2は、ビート信号に基づいて、受信アンテナ5−2で受信された反射波の信号電力P2を求める(ステップS106)。そして物体情報算出部8−2は、信号電力P2、距離D2及び相対的な移動速度V2を判定部9へ出力する。
【0035】
判定部9は、距離D1とD2との差の絶対値が所定の閾値Thd未満か否か判定する(ステップS107)。
距離D1とD2との差の絶対値が閾値Thd以上である場合(ステップS107−No)、判定部9は、各受信アンテナで受信した反射波は、異なる物体により反射されたものであると判定する。この場合、判定部9は、探知波を反射した物体が偏波面回転リフレクタ搭載車両か否かの判定を行わない。そして判定部9は、距離D1、D2、相対的な移動速度V1、V2を、それぞれ異なる物体の距離及び相対的な移動速度として、インターフェース部10を介して上位システムへ出力し、その後、物体検知処理を終了する。
【0036】
一方、距離D1とD2との差の絶対値が所定の閾値Thd未満である場合(ステップS107−Yes)、判定部9は、電力P2が電力P1よりも大きいか否か判定する(ステップS108)。そして電力P2が電力P1よりも大きい場合(ステップS108−Yes)、判定部9は、探知波を反射した物体は偏波面回転リフレクタであると判定する(ステップS109)。すなわち、判定部9は、探知波を反射した物体は偏波面回転リフレクタを搭載した車両を検知する。
一方、電力P2が電力P1以下である場合(ステップS108−No)、判定部9は、物体は偏波面回転リフレクタを搭載しない車両であると判定する(ステップS110)。
ステップS109またはS110の後、判定部9は、インターフェース部10を介して、その判定結果を上位システムへ出力する。また判定部9は、電力P1とP2のうち、大きい方の電力に対応する物体情報算出部にて算出された相対速度及び距離も、インターフェース部10を介して、上位システムへ出力する。
その後、レーダ装置1は、物体検知処理を終了する。なお、ステップS101〜S103の処理と、ステップS104〜S106の処理は、並行して実行されてもよい。
【0037】
以上に説明してきたように、このレーダ装置は、送信アンテナから放射された探知波の偏波面と同一の偏波面を持つ反射波の信号電力と探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力との比較結果で探知された物体を識別する。そのため、このレーダ装置は、探知された物体が、偏波面回転リフレクタか否かを正確に識別することができる。したがって、偏波面回転リフレクタが、例えば、二輪車のような小型の車両に取り付けられていれば、このレーダ装置は、探知された物体が大型車両か小型の車両かを識別できる。
【0038】
なお、本発明は上記の実施形態に限定されるものではない。一つの変形例によれば、送信アンテナと、探知波の偏波面と同一の偏波面を持つ反射波を受信する受信アンテナは、一つの共用アンテナであってもよい。この場合、共用アンテナは、例えば、高周波スイッチを介して発振器及び探知波の偏波面と同じ偏波面を持つ反射波を検知する検波器と接続される。そして高周波スイッチは、探知波の周波数変調周期の1/2よりも短い周期で、共用アンテナの接続先を発振器と検波器で交互に切り替える。
またレーダ装置は、送信アンテナ及び受信アンテナの向きを水平方向または鉛直方向に回転させる機械的機構を有してもよい。そしてレーダ装置は、一定周期あるいは不定期的に、送信アンテナ及び受信アンテナの向きを水平方向または鉛直方向に動かして、探知波の放射方向及び検知する反射波の到来方向を水平方向または鉛直方向に変化させてもよい。あるいは、送信アンテナ及び受信アンテナがアレイアンテナである場合、レーダ装置は、電子スキャン方式にしたがって、探知波の放射方向及び検知する反射波の到来方向を変化させてもよい。これにより、レーダ装置は、探知範囲を広くすることができる。
【0039】
さらに他の変形例によれば、変調部及び発振器は、パルス圧縮方式または二周波連続波(continuous wave、CW)方式に従った探知信号を生成し、その探知信号に相当する探知波を送信アンテナから放射させてもよい。この場合、検波器及び物体情報算出部も、パルス圧縮方式または二周波CW方式に従って、レーダ装置に対する探知波を反射した物体の相対速度及びレーダ装置とその物体間の距離、及び反射波の信号電力を算出する。
さらにまた、一つの物体情報算出部が、二つの受信アンテナのそれぞれによって受信された反射波ごとに、検知した物体とレーダ装置間の距離及びレーダ装置に対する検知した物体の相対速度を算出してもよい。
【0040】
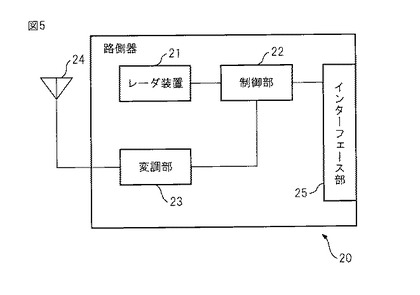
図5は、上記の一つの実施形態またはその変形例によるレーダ装置が組み込まれた路側器の概略構成図である。
路側器20は、例えば、交差点の近傍またはカーブする道路の近傍に設置される。そして路側器20は、例えば、道路上を走行し、かつ、何れかの方向から路側器20へ接近する移動物体の一例である車両を検知する。そして路側器20は、路側器20の通信可能範囲内に存在し、かつ、路側器20と無線通信可能な車載通信機を搭載した車両へ、車両を検知したことを通知する。
そのために、路側器20は、レーダ装置21と、制御部22と、変調部23と、アンテナ24と、インターフェース部25とを有する。
【0041】
レーダ装置21は、上記の実施形態またはその変形例によるレーダ装置である。このレーダ装置が有する送信アンテナからの探知波の放射方向及び二つの受信アンテナが検知する反射波の到来方向は、例えば、路側器20近傍の道路に沿った方向へ向けられる。そしてレーダ装置21は、道路上を走行している車両を検知する。レーダ装置21は、検知した車両が偏波面回転リフレクタを搭載した車両か否かを判定する。そしてレーダ装置21は、道路上を走行している車両を検知すると、その車両に対する上記の判定結果と、その車両と路側器20間の距離及びその車両の移動速度を含む車両検知情報を制御部22へ出力する。
【0042】
制御部22は、少なくとも一つのプロセッサと、メモリ回路とを有する。そして制御部22は、路側器20全体を制御する。
また路側器20の通信可能範囲内に存在する車載通信機との間で通信チャネルを設定する。そして制御部22は、レーダ装置21から車両検知情報を受け取ると、その車両検知情報を含む通知信号を生成する。制御部22は、通知信号に対してターボ符号化処理などの誤り訂正符号化処理を実行する。そして制御部22は、誤り訂正符号化された通知信号に対して、例えば、直交周波数分割多重(Orthogonal Frequency Division Multiplex、OFDM)方式といった所定の多重化方式に従って多重化する。制御部22は、多重化された通知信号を変調部23へ出力する。
【0043】
変調部23は、制御部22から受け取った通知信号をアナログ化する。そして変調部23は、アナログ化された通知信号を、無線周波数を持つ搬送波に重畳することにより無線信号を生成し、その無線信号を電力増幅器により増幅する。そして変調部23は、増幅された無線信号をアンテナ24を介して車載通信機へ向けて出力する。
このように、路側器20は、車載通信機を搭載した車両に対して、接近する車両が存在することを通知できる。特に、検知された移動物体が偏波面回転リフレクタを搭載した二輪車などの小型車両であるとの判定結果が通知されることにより、車載通信機を搭載した車両のドライバの死角に検知された小型車両が存在することを、そのドライバは知ることができる。そのため、路側器20は、いわゆる右直事故などを未然に防止することができる。
【0044】
インターフェース部25は、路側器20を通信ネットワークへ接続するためのインターフェース回路を有する。そしてインターフェース部25は、制御部22から受け取った車両検知情報及びその車両検知情報の取得時刻を所定の通信規格に従った信号に変換し、変換された信号を通信ネットワークへ向けて出力する。
なお、路側器20は、車載通信機からアンテナ24を介して無線信号を受信するようにしてもよい。
【0045】
図6は、上記の一つの実施形態またはその変形例によるレーダ装置が組み込まれた物体検知用車載装置の概略構成図である。
物体検知用車載装置30は、例えば、物体検知用車載装置30が搭載された車両へ接近する他の車両を検知する。そして物体検知用車載装置30は、検知した車両の種別に応じた警告処理をドライバに対して行う。
そのために、物体検知用車載装置30は、レーダ装置31と、制御部32と、記憶部33と、インターフェース部34とを有する。
【0046】
レーダ装置31は、上記の実施形態またはその変形例によるレーダ装置である。このレーダ装置が有する送信アンテナからの探知波の放射方向及び二つの受信アンテナが検知する反射波の到来方向は、例えば、物体検知用車載装置30が搭載された車両の後方へ向けられる。そしてレーダ装置31は、物体検知用車載装置30が搭載された車両へ接近する移動物体の一例である他の車両を検知する。レーダ装置31は、検知された車両が偏波面回転リフレクタを搭載した車両か否かを判定する。そしてレーダ装置31は、他の車両を検知すると、検知された車両に対する上記の判定結果を含む車両検知情報を制御部32へ出力する。なお、車両検知情報には、物体検知用車載装置30が搭載された車両と検知された車両間の距離及び物体検知用車載装置30が搭載された車両に対する検知された車両の相対的な移動速度が含まれてもよい。
【0047】
制御部32は、少なくとも一つのプロセッサ及びその周辺回路を有する。そして制御部32は、物体検知用車載装置30全体を制御する。
また制御部32は、レーダ装置31から車両検知情報を受け取る。さらに制御部32は、車両制御用電子制御ユニット(図示せず)から、インターフェース部34を介して、物体検知用車載装置30が搭載された車両の速度、ブレーキの踏み込み量、ウインカー操作の有無などを表す車両挙動情報を受け取る。そして制御部32は、例えば、車両検知情報及び車両挙動情報と、警告情報との関係を表す参照テーブルを参照して、車両検知情報及び車両挙動情報に応じた警告情報を記憶部33から読み込む。なお、制御部32は、車両検知情報と警告情報との関係を表す参照テーブルを参照して、車両検知情報に応じた警告情報を記憶部33から読み込んでもよい。
【0048】
例えば、車両検知情報に含まれる検知された車両の判定結果が、偏波面回転リフレクタが搭載された二輪車であることを示し、かつ、車両挙動情報が左折を示すウインカー操作が実行されていることを表しているとする。この場合、制御部32は、「二輪車が接近中です、注意して下さい」という警告メッセージを含む警告情報を記憶部33から読み込む。あるいは、車両検知情報に含まれる検知された車両の判定結果が、偏波面回転リフレクタが搭載されていない車両であることを示し、かつ、検知された車両が所定距離以内であるとする。この場合、制御部32は、「後方から車両が接近中です、急ブレーキを避けて下さい」という警告メッセージを含む警告情報を記憶部33から読み込む。
そして制御部32は、読み込んだ警告情報を、インターフェース部34を介して、車内に設置されたモニタ(図示せず)または運転支援装置(図示せず)へ出力する。
また制御部32は、車両検知情報を、インターフェース部34を介して、運転支援装置へ出力してもよい。
【0049】
記憶部33は、例えば、不揮発性のメモリ回路を有する。そして記憶部33は、参照テーブル及び警告情報を記憶する。さらに記憶部33は、車両検知情報を一定期間記憶してもよい。
【0050】
インターフェース部34は、コントロールエリアネットワーク(Control Area Network、CAN)などの規格に従った車内通信ネットワークに物体検知用車載装置30を接続するための通信インターフェース回路を有する。そしてインターフェース部34は、車内通信ネットワークを介して、モニタ(図示せず)、車両制御用電子制御ユニット(図示せず)または運転支援装置(図示せず)といった、車両に搭載された他の機器と通信する。そしてインターフェース部34は、車両制御用電子制御ユニットから、車両挙動情報を受け取り、その車両挙動情報を制御部32へ渡す。
あるいは、インターフェース部34は、制御部32から受け取った警告情報を車内設置モニタまたは運転支援装置へ出力する。さらにインターフェース部34は、制御部32から受け取った車両検知情報を運転支援装置へ出力してもよい。
【0051】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
【符号の説明】
【0052】
1 レーダ装置
2 変調部
3 発振器
4 送信アンテナ
5−1、5−2 受信アンテナ
6 制御部
7−1、7−2 検波器
8−1、8−2 物体情報算出部
9 判定部
10 インターフェース部
20 路側器
21 レーダ装置
22 制御部
23 変調部
24 アンテナ
25 インターフェース部
30 物体検知用車載装置
31 レーダ装置
32 制御部
33 記憶部
34 インターフェース部
【技術分野】
【0001】
本発明は、例えば、探知波を放射してその探知波についての反射波を検出することにより、探知波を反射した物体を検知するレーダ装置、及びそのようなレーダ装置を備えた路側器及び車載装置に関する。
【背景技術】
【0002】
従来より、交通事故の発生を防止して、より安全な交通環境を実現するための技術の研究が行われている。そのような技術において、道路上を走行する車両が、その車両の周囲に存在する他の車両を検出し、または他の車両までの距離を測定することが有用である。他の車両の存在を検知したり、あるいは他の車両までの距離を求めることにより、例えば、車両に搭載された運転支援装置は、必要な場合にドライバに対して警告を行って、衝突などの危険を回避させることができる。
そこで、例えば、レーダ装置を用いて、他の車両の位置などを検出する技術が開発されている。例えば、偏波面の異なる二つの指向性空中線により受信された受信信号の和分成分と差分成分を求め、その和分成分と差分成分の差に基づいて、電波発射源の方位及び位置を探知する技術が提案されている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−338212号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
交通事故の発生を防止するために、二輪車のような小型の車両を高精度で検知することが重要である。例えば、左折しようとする車両が、その車両の後方から接近してくる二輪車を検知できれば、いわゆる巻き込み事故の発生を防止できる可能性が高くなる。あるいは、右折しようと交差点で待機している車両が、その車両のドライバの死角に存在し、かつ前方から接近する二輪車を検知できれば、いわゆる右直事故の発生を防止できる可能性が高くなる。
しかし、小型の車両については、探知波を反射する面積が小さい。そこで、リフレクタのようにレーダ装置から放射された探知波を効率よく反射する器具を、検知対象である小型の車両に取り付けることにより、レーダ装置が受信可能な、小型の車両による反射波の強度を大きくできる。
一方、トラック、バスといった大型車両については、探知波を反射する面積が大きいので、大型の車両で反射され、レーダ装置で受信される反射波の強度は、リフレクタによる反射波の強度と同程度またはそれ以上となることがある。そのため、レーダ装置は、探知波を反射した物体がリフレクタを搭載した車両か否かを識別できないおそれがあった。
【0005】
そこで本明細書は、探知波を反射した物体が特定の反射部材か否かを識別できるレーダ装置、及びそのようなレーダ装置が組み込まれた路側器及び車載装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
一つの実施形態によれば、レーダ装置が提供される。このレーダ装置は、第1の偏波面を持つ探知波を放射する送信アンテナと、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部とを有する。
【0007】
また他の実施形態によれば、道路上に存在する物体を検知する路側器が提供される。この路側器は、第1の偏波面を持つ探知波を道路に向けて放射する送信アンテナと、探知波が道路上に存在する物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が道路上に存在する物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部とを有するレーダ装置と、レーダ装置により検知された物体及びその物体が反射部材を搭載した車両か否かを表す判定結果とを含む検知情報を生成する制御部と、検知情報を含む通知信号を所定の通信可能範囲内に存在する通信機へ送信するアンテナとを有する。
【0008】
さらに他の実施形態によれば、車両に搭載される車載装置が提供される。この車載装置は、第1の偏波面を持つ探知波を放射する送信アンテナと、探知波が物体によって反射された、第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、探知波が物体によって反射された、第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、第2の反射波の信号電力が第1の反射波の信号電力よりも大きい場合、第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部とを有するレーダ装置と、レーダ装置により検知された物体が反射部材を搭載した車両か否かを表す判定結果を含む検知情報と警告情報との関係を表す参照テーブルを参照して所定の警告情報を特定する制御部と、特定された警告情報を車両に搭載された他の機器へ出力するインターフェース部とを有する。
【0009】
本発明の目的及び利点は、請求項において特に指摘されたエレメント及び組み合わせにより実現され、かつ達成される。
上記の一般的な記述及び下記の詳細な記述の何れも、例示的かつ説明的なものであり、請求項のように、本発明を限定するものではないことを理解されたい。
【発明の効果】
【0010】
本明細書に開示されたレーダ装置、路側器及び車載装置は、探知波を反射した物体が特定の反射部材か否かを識別することができる。
【図面の簡単な説明】
【0011】
【図1】一つの実施形態によるレーダ装置の概略構成図である。
【図2】偏波面回転リフレクタ搭載車両からの反射波とその他の車両からの反射波を表す概略図である。
【図3】偏波面回転リフレクタ搭載車両からの反射波の強度の測定値と大型車からの反射波の強度の測定値の一例を表すグラフである。
【図4】物体検知処理の動作フローチャートを示す。
【図5】一つの実施形態によるレーダ装置が組み込まれた路側器の概略図である。
【図6】一つの実施形態によるレーダ装置が組み込まれた物体検知用車載装置の概略図である。
【発明を実施するための形態】
【0012】
以下、図を参照しつつ、一つの実施形態による、レーダ装置について説明する。
反射部材であるリフレクタの一例として、所定方向の偏波面を持つ直線偏波を反射することにより、その偏波面を所定角度回転させるリフレクタが知られている。以下では、そのようなリフレクタを偏波面回転リフレクタと呼ぶ。
偏波面回転リフレクタは、例えば、二つの平板状の金属板を、互いに対して90°をなすように設け、かつ、その二つの金属板が接する線に直交する線を、探知波の偏波面に対して所定角度の1/2だけ傾けるように配置したコーナーリフレクタとすることができる。
あるいは、偏波面回転リフレクタは、3個の略三角形状の平板状金属板を貼り合わせた三面コーナーリフレクタに対して、その三面コーナーリフレクタの開口部に、直線状スリットが形成された金属板を取り付けたものであってもよい。
【0013】
このような偏波面回転リフレクタが検知対象の物体に取り付けられているとする。このような場合、レーダ装置から出力された直線偏波である探知波が物体により反射された反射波のうち、偏波面回転リフレクタにより反射された反射波の偏波面は、それ以外の物体により反射された反射波の偏波面と異なる可能性が高い。そのため、レーダ装置は、探知波の偏波面に対して上記の所定角度回転した偏波面を持つ反射波を検知することで、探知波を反射した物体が検知対象物体か否かを識別できると想定される。
しかし、発明者は、鋭意研究の結果、トラック、バスといった大型車両による反射波も、偏波面回転リフレクタによる反射波と同様に、偏波面が回転した成分を有するという知見を得た。そのような大型車両は探知波を反射可能な様々な面を持つため、それらの面で探知波が複数回反射されることによって偏波面が回転すると推定される。
【0014】
そこで、発明者は、探知波を反射した物体が、偏波面回転リフレクタか、あるいは大型車両などの他の物体かを精度良く識別可能なレーダ装置を開発した。このレーダ装置は、直線偏波である探知波を出力する送信アンテナと、探知波の偏波面と同方向の偏波面を持つ反射波を検知する第1の受信アンテナと、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を検知する第2の受信アンテナを有する。そしてこのレーダ装置は、第2の受信アンテナにより検知された反射波の信号電力と、第1の受信アンテナにより検知された反射波の信号電力との比に基づいて、探知波を反射した物体が偏波面回転リフレクタか否かを識別する。
【0015】
図1は、一つの実施形態によるレーダ装置の概略構成図である。本実施形態では、レーダ装置1は、周波数変調連続波(frequency modulated continuous wave、fmcw)方式により、探知波を反射した物体を検知する。そのために、レーダ装置1は、変調部2と、発振器3と、送信アンテナ4と、受信アンテナ5−1、5−2と、制御部6と、検波器7−1、7−2と、物体情報算出部8−1、8−2と、判定部9と、インターフェース部10とを有する。
変調部2、発振器3、制御部6、検波器7−1、7−2、物体情報算出部8−1、8−2及び判定部9は、それぞれ、別個の演算回路であってもよく、あるいは、それらの機能を実行する一つの集積回路として、レーダ装置1に実装されてもよい。
【0016】
変調部2は、制御部6からの制御信号に従って、所定の周期で周波数が直線的な増加と減少を繰り返すアナログの周波数変調信号を生成する。そのために、変調部2は、例えば、ダイレクトデジタル周波数シンセサイザを有する。例えば、変調部2は、制御信号によって検出する物体までの距離についての解像度が短く設定される場合、例えば、約1mの解像度が得られるように、(1/500MHz)の周期で出力する信号の周波数を変化させる。また変調部2は、制御信号によって探知範囲が広く設定される場合、(1/250MHz)よりも長い周期で出力する信号の周波数を変化させる。
そして変調部2は、周波数変調信号を発振器3へ出力する。
【0017】
発振器3は、変調部2からの周波数変調信号を、ミリ波に相当する所定の中心周波数を持つfmcw信号に変換する。そのために、発振器3は、例えば、位相同期回路を有する。あるいは、発振器3は、所定の局部発振周波数を持つ周期信号を出力する局部発振器と、その周期信号と変調部2からの周波数変調信号とをミキシングするミキサとを有してもよい。さらに発振器3は、fmcw信号を増幅するための増幅器を有してもよい。なお、中心周波数は、例えば、30GHz〜300GHzの範囲内に含まれる何れかの周波数とすることができる。
また発振器3は、制御部6からの制御信号に従ってfmcw信号の電力を調整してもよい。
発振器3から出力されたfmcw信号は、分配器(図示せず)を介して、送信アンテナ4及び検波器7−1、7−2へ伝達される。
【0018】
送信アンテナ4は、発振器3から受け取ったfmcw信号を、所定方向の偏波面を持つ直線偏波であり、かつレーダ波である探知波として、所定の方向へ向けて放射する。そのために、送信アンテナ4は、例えば、ホーンアンテナ、ダイポールアンテナ、あるいはアレイアンテナとすることができる。また本実施形態では、探知波の偏波面が水平方向となるように、送信アンテナ4は配置される。しかし探知波の偏波面は、水平方向に限定されず、例えば、鉛直方向、あるいは水平面に対して45°をなす方向に沿っていてもよい。
【0019】
受信アンテナ5−1、5−2は、送信アンテナ4から放射され、何れかの物体で反射された探知波である反射波を受信する。特に、受信アンテナ5−1は、探知波の偏波面と同じ偏波面を持つ反射波の直線偏波成分を受信するように配置される。一方、受信アンテナ5−2は、探知波の偏波面に対して所定の角度回転した偏波面を持つ反射波の直線偏波成分を受信するように配置される。本実施形態では、所定の角度は90°に設定される。しかし、所定の角度は90°に限定されない。所定の角度は、偏波面回転リフレクタにより偏波面が回転された反射波のうち、探知波の偏波面に直交する偏波面の成分の方が探知波の偏波面と同じ偏波面の成分よりも大きくなるように、例えば、45°〜135°の範囲内であればよい。このように所定の角度が設定されることにより、レーダ装置1は、偏波面回転リフレクタによって偏波面が回転した反射波の信号電力を、偏波面を回転させない物体で反射された反射波の信号電力と区別することが容易となる。
【0020】
受信アンテナ5−1、5−2は、それぞれ、例えば、ホーンアンテナ、ダイポールアンテナ、あるいはアレイアンテナとすることができる。そして例えば、送信アンテナ4及び受信アンテナ5−1、5−2がダイポールアンテナである場合、受信アンテナ5−1が有する2本のアンテナの長手方向が、送信アンテナ4が有する2本のアンテナの長手方向と平行となるように受信アンテナ5−1は配置される。一方、受信アンテナ5−2が有する2本のアンテナの長手方向が、送信アンテナ4が有する2本のアンテナの長手方向と直交するように受信アンテナ5−2は配置される。
【0021】
受信アンテナ5−1は、受信した反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−1へ出力する。一方、受信アンテナ5−2は、受信した反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−2へ出力する。
【0022】
制御部6は、レーダ装置1全体を制御する。また制御部6は、送信アンテナ4から放射される探知波を、レーダ装置1の周囲の状況に応じて調整するよう、発振器3及び変調部2を調整する。そのために、制御部6は、プロセッサ及び周辺回路を有する。
例えば、制御部6は、上位システム(図示せず)からインターフェース部10を介して、探知波を制御するための情報を含む信号を受け取る。例えば、制御部6は、そのような信号として、レーダ装置1が設置された場所の現在の天候を表す天候情報を含む信号を受け取る。そして天候情報が、現在の天候が雨天あるいは降雪であることを示していれば、制御部6は、発振器3に対して、現在の天候が晴天あるいは曇天である場合よりもfmcw信号の電力を大きくする制御信号を送信する。このように、制御部6は、雨天あるいは降雪といった、探知波が遠方まで届き難い天候である場合に送信アンテナ4から放射される探知波の電力を大きくすることで、検知対象物体を確実に検知できるようにする。一方、制御部6は、晴天あるいは曇天といった、探知波が遠方まで届き易い天候である場合に送信アンテナ4から放射される探知波の電力を小さくすることで、レーダ装置1の消費電力を抑制できる。
【0023】
またレーダ装置1が車両に搭載されている場合、制御部6は、探知波を制御するための情報を含む信号として、例えば、レーダ装置1が搭載された車両の速度情報を含む信号を受け取る。そして制御部6は、その車両が停止している場合、あるいは例えば時速10km/h以下といった低速で移動している場合、変調部2へ、距離方向の解像度を高くするために、探知波を変調する周期を短くすることを示す制御信号を送信する。一方、レーダ装置1が搭載された車両の速度が、例えば、時速10km/hよりも速い場合、制御部6は、探知範囲を広く設定するように、変調部2へ、探知波を変調する周期を長くすることを示す制御信号を送信する。
【0024】
検波器7−1は、受信アンテナ5−1にて受信された、探知波の偏波面と同じ偏波面を持つ反射波に対応する受信信号と、発振器3から出力されたfmcw信号とを乗じる。そして検波器7−1は、fmcw信号において周波数が高くなる上り区間と周波数が低くなる下り区間のそれぞれについて、反射波の周波数とfmcw信号の周波数との差を表すビート信号を生成する。
そのために、検波器7−1は、受信アンテナ5−1にて受信された反射波に対応する受信信号とfmcw信号を乗じるミキサを有する。
同様に、検波器7−2は、受信アンテナ5−2にて受信された、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波に対応する受信信号と、発振器3から出力されたfmcw信号とを乗じることにより上り区間と下り区間のそれぞれのビート信号を生成する。
また検波器7−1、7−2は、それぞれ、ミキサにより生成されたビート信号をデジタル信号に変換するアナログ/デジタル変換器を有する。さらに検波器7−1、7−2は、それぞれ、受信信号を増幅する増幅器を有してもよい。
検波器7−1、7−2は、それぞれ、生成した上り区間及び下り区間のビート信号を物体情報算出部8−1、8−2へ出力する。
【0025】
物体情報算出部8−1、8−2は、それぞれ、検波器7−1、7−2から受け取った上り区間及び下り区間のビート信号に基づいて、探知波を反射した物体のレーダ装置1に対する相対的な移動速度及びその物体とレーダ装置1間の距離を算出する。
例えば、物体情報算出部8−1、8−2は、上り区間のビート信号を高速フーリエ変換してピーク周波数を検出することにより、上り区間における反射波の周波数fupを求める。また物体情報算出部8−1、8−2は、下り区間のビート信号を高速フーリエ変換してピーク周波数を検出することにより、下り区間における反射波の周波数fdownを求める。そして物体情報算出部8−1、8−2は、それぞれ、次式に従って、検知された物体までの距離D及び検知された物体の相対速度Vを算出する。
【数1】
ここで、cは光速を表し、Tは探知波の変調周期を表す。またf0は探知波の中心周波数を表し、Δfは、探知波の周波数変動幅を表す。
そして物体情報算出部8−1、8−2は、それぞれ、検知された物体までの距離及び検知された物体の相対速度を判定部9へ出力する。
また物体情報算出部8−1、8−2は、それぞれ、検波器7−1、7−2から受け取ったビート信号に基づいて、受信アンテナ5−1、5−2により受信された反射波の信号電力を求め、その信号電力を判定部9へ出力する。
【0026】
判定部9は、例えば、プロセッサと、揮発性または不揮発性のメモリとを有する。そして判定部9は、探知波の偏波面と同じ偏波面を持つ反射波の信号電力と、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力との比に基づいて、探知波を反射した物体が、偏波面回転リフレクタが搭載された車両か否か判定する。
【0027】
図2は、偏波面回転リフレクタ搭載車両からの反射波とその他の車両からの反射波を表す概略図である。
図2において、車両201は、偏波面回転リフレクタ201aを搭載している。一方、普通車202及び大型車203は、偏波面回転リフレクタを搭載していない。
レーダ装置1から放射された探知波が車両201に搭載された偏波面回転リフレクタ201aにより反射されると、その反射波の偏波面は探知波の偏波面に対して所定角度回転する。そのため、レーダ装置1では、探知波の偏波面に対して偏波面が所定角度回転した反射波の信号電力が、探知波の偏波面と同じ偏波面を持つ反射波の信号電力よりも大きくなる。
一方、レーダ装置1から放射された探知波が普通車両202により反射されると、その反射波の偏波面は回転しない。そのため、レーダ装置1では、探知波の偏波面と同じ偏波面を持つ反射波の信号電力が、探知波の偏波面に対して偏波面が所定角度回転した反射波の信号電力よりも大きくなる。
また、レーダ装置1から放射された探知波が大型車両203により反射された反射波の大部分の偏波面は回転しない。しかし、大型車両203は、探知波を反射可能な複数の面を有するため、反射波の一部の偏波面は、探知波の偏波面に対して所定角度回転する。そのため、レーダ装置1は、探知波の偏波面と同じ偏波面を持つ反射波と、探知波の偏波面に対して偏波面が所定角度回転した反射波の両方を検知できる。
【0028】
図3は、偏波面回転リフレクタ搭載車両からの反射波の強度の測定値と大型車からの反射波の強度の測定値の一例を表すグラフである。このグラフにおいて、横軸はレーダ装置1と探知波を反射した物体間の距離を表し、縦軸は、レーダ装置1にて受信した反射波の強度を表す。そしてグラフ301は、偏波面回転リフレクタ搭載車両による反射波のうち、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度を表す。またグラフ302は、偏波面回転リフレクタ搭載車両による反射波のうち、探知波の偏波面と同じ偏波面を持つ成分の信号強度を表す。一方、グラフ311は、大型車両による反射波のうち、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度を表す。またグラフ312は、大型車両による反射波のうち、探知波の偏波面と同じ偏波面を持つ成分の信号強度を表す。
図3に示されるように、探知波の偏波面に対して所定角度回転した偏波面を持つ成分の信号強度について、大型車両による反射波の信号強度の方が、偏波面回転リフレクタ搭載車両による反射波の信号強度よりも大きい。そのため、レーダ装置は、反射波の信号強度そのものに基づいて、探知波を反射した物体が偏波面回転リフレクタか否かを正確に判定することは困難である。
しかし、大型車両については、探知波の偏波面と同じ偏波面を持つ反射波の成分の信号強度が、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の成分の信号強度よりも大きい。これに対して、偏波面回転リフレクタ搭載車両については、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の成分の信号強度が探知波の偏波面と同じ偏波面を持つ反射波の成分の信号強度よりも大きい。
【0029】
そこで判定部9は、探知波の偏波面と同一の偏波面を持つ反射波の信号電力よりも探知波の偏波面に対して所定角度回転した反射波の信号電力が大きい場合、探知波を反射した物体は偏波面回転リフレクタであると判定する。すなわち、判定部9は、偏波面回転リフレクタ搭載車両を検知する。一方、判定部9は、探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力が探知波の偏波面と同一の偏波面を持つ反射波の信号電力以下である場合、検知された物体はそのようなリフレクタを搭載しない車両、例えば、大型車両であると判定する。
判定部9は、検知した物体の判定結果を、インターフェース部10を介して、上位システムへ出力する。また判定部9は、受信アンテナ5−1、5−2で受信した反射波の信号電力のうち、大きい方の信号電力に対応する物体情報算出部にて算出された相対速度及び距離を、インターフェース部10を介して、上位システムへ出力する。
【0030】
なお、受信アンテナ5−1で受信された反射波を反射した物体と、受信アンテナ5−2で受信された反射波を反射した物体とが異なることがある。そこで判定部9は、受信アンテナ5−1で受信した反射波に基づいて算出された、レーダ装置1と探知波を反射した物体間の距離D1と、受信アンテナ5−2で受信した反射波に基づいて算出された、レーダ装置1と探知波を反射した物体間の距離D2とを比較する。そして判定部9は、距離D1とD2の差の絶対値が、同一の車両と推定される所定の閾値(例えば、2m)未満である場合に限り、探知波を反射した物体が偏波面回転リフレクタか否かの判定を行ってもよい。一方、距離D1とD2の差の絶対値が、その所定の閾値以上離れている場合、判定部9は、受信アンテナ5−1で受信した反射波を反射した物体は、受信アンテナ5−2で受信した反射波を反射した物体と異なると判定する。
【0031】
あるいは、判定部9は、距離D1とD2との差だけでなく、受信アンテナ5−1、5−2で受信した反射波に基づいてそれぞれ算出された相対速度V1とV2間の差に基づいて、各受信アンテナで受信した反射波を反射した物体が同一物体か否かを判定してもよい。この場合、判定部9は、距離D1とD2との差の絶対値が所定の距離未満であり、かつ、相対速度V1と相対速度V2との差の絶対値が、相対速度V1とV2が同一速度とみなせる所定値未満の場合に、各受信アンテナで受信した反射波を反射した物体は同一であると判定する。そして判定部9は、探知波を反射した物体がリフレクタ搭載車両か否かの判定を行う。
判定部9は、各受信アンテナで受信した反射波が、異なる物体により反射された反射波であると判定した場合、各反射波に対応する距離D1、D2及び相対速度V1、V2を、インターフェース部10を介して、上位システムへ出力する。
【0032】
インターフェース部10は、レーダ装置1を通信ネットワークを介して上位システムと接続するためのインターフェース回路を有する。そしてインターフェース部10は、判定部9から受け取った、検知された物体の判定結果及びその物体までの距離及び相対的な移動速度を上位システムへ出力する。
またインターフェース部10は、上位システムから受け取った、探知波を制御するための情報を制御部6へ伝達する。
【0033】
図4は、レーダ装置1により実行される物体検知処理の動作フローチャートを示す。なお、この物体検知処理は、一定周期(例えば、1msec周期または10msec周期)で繰り返し実行される。
受信アンテナ5−1は、送信アンテナ4から放射された探知波の偏波面と同じ偏波面を持つ反射波を受信する(ステップS101)。そして受信アンテナ5−1は、反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−1へ出力する。
検波器7−1は、反射波と探知波に相当するfmcw信号をミキシングすることにより、上り区間と下り区間のビート信号を生成する(ステップS102)。検波器7−1は、上り区間と下り区間のビート信号を物体情報算出部8−1へ出力する。
物体情報算出部8−1は、レーダ装置1から探知波の偏波面と同じ偏波面を持つ反射波を反射した物体までの距離D1と、レーダ装置1に対するその物体の相対的な移動速度V1を算出する。また物体情報算出部8−1は、ビート信号に基づいて、受信アンテナ5−1で受信された反射波の信号電力P1を求める(ステップS103)。そして物体情報算出部8−1は、信号電力P1、距離D1及び相対的な移動速度V1を判定部9へ出力する。
【0034】
一方、受信アンテナ5−2は、送信アンテナ4から放射された探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を受信する(ステップS104)。そして受信アンテナ5−2は、反射波の信号強度に応じた信号電力を持つ受信信号を検波器7−2へ出力する。
検波器7−2は、反射波と探知波に相当するfmcw信号をミキシングすることにより、上り区間と下り区間のビート信号を生成する(ステップS105)。検波器7−2は、上り区間と下り区間のビート信号を物体情報算出部8−2へ出力する。
物体情報算出部8−2は、レーダ装置1から探知波の偏波面に対して所定角度回転した偏波面を持つ反射波を反射した物体までの距離D2と、レーダ装置1に対するその物体の相対的な移動速度V2を算出する。また物体情報算出部8−2は、ビート信号に基づいて、受信アンテナ5−2で受信された反射波の信号電力P2を求める(ステップS106)。そして物体情報算出部8−2は、信号電力P2、距離D2及び相対的な移動速度V2を判定部9へ出力する。
【0035】
判定部9は、距離D1とD2との差の絶対値が所定の閾値Thd未満か否か判定する(ステップS107)。
距離D1とD2との差の絶対値が閾値Thd以上である場合(ステップS107−No)、判定部9は、各受信アンテナで受信した反射波は、異なる物体により反射されたものであると判定する。この場合、判定部9は、探知波を反射した物体が偏波面回転リフレクタ搭載車両か否かの判定を行わない。そして判定部9は、距離D1、D2、相対的な移動速度V1、V2を、それぞれ異なる物体の距離及び相対的な移動速度として、インターフェース部10を介して上位システムへ出力し、その後、物体検知処理を終了する。
【0036】
一方、距離D1とD2との差の絶対値が所定の閾値Thd未満である場合(ステップS107−Yes)、判定部9は、電力P2が電力P1よりも大きいか否か判定する(ステップS108)。そして電力P2が電力P1よりも大きい場合(ステップS108−Yes)、判定部9は、探知波を反射した物体は偏波面回転リフレクタであると判定する(ステップS109)。すなわち、判定部9は、探知波を反射した物体は偏波面回転リフレクタを搭載した車両を検知する。
一方、電力P2が電力P1以下である場合(ステップS108−No)、判定部9は、物体は偏波面回転リフレクタを搭載しない車両であると判定する(ステップS110)。
ステップS109またはS110の後、判定部9は、インターフェース部10を介して、その判定結果を上位システムへ出力する。また判定部9は、電力P1とP2のうち、大きい方の電力に対応する物体情報算出部にて算出された相対速度及び距離も、インターフェース部10を介して、上位システムへ出力する。
その後、レーダ装置1は、物体検知処理を終了する。なお、ステップS101〜S103の処理と、ステップS104〜S106の処理は、並行して実行されてもよい。
【0037】
以上に説明してきたように、このレーダ装置は、送信アンテナから放射された探知波の偏波面と同一の偏波面を持つ反射波の信号電力と探知波の偏波面に対して所定角度回転した偏波面を持つ反射波の信号電力との比較結果で探知された物体を識別する。そのため、このレーダ装置は、探知された物体が、偏波面回転リフレクタか否かを正確に識別することができる。したがって、偏波面回転リフレクタが、例えば、二輪車のような小型の車両に取り付けられていれば、このレーダ装置は、探知された物体が大型車両か小型の車両かを識別できる。
【0038】
なお、本発明は上記の実施形態に限定されるものではない。一つの変形例によれば、送信アンテナと、探知波の偏波面と同一の偏波面を持つ反射波を受信する受信アンテナは、一つの共用アンテナであってもよい。この場合、共用アンテナは、例えば、高周波スイッチを介して発振器及び探知波の偏波面と同じ偏波面を持つ反射波を検知する検波器と接続される。そして高周波スイッチは、探知波の周波数変調周期の1/2よりも短い周期で、共用アンテナの接続先を発振器と検波器で交互に切り替える。
またレーダ装置は、送信アンテナ及び受信アンテナの向きを水平方向または鉛直方向に回転させる機械的機構を有してもよい。そしてレーダ装置は、一定周期あるいは不定期的に、送信アンテナ及び受信アンテナの向きを水平方向または鉛直方向に動かして、探知波の放射方向及び検知する反射波の到来方向を水平方向または鉛直方向に変化させてもよい。あるいは、送信アンテナ及び受信アンテナがアレイアンテナである場合、レーダ装置は、電子スキャン方式にしたがって、探知波の放射方向及び検知する反射波の到来方向を変化させてもよい。これにより、レーダ装置は、探知範囲を広くすることができる。
【0039】
さらに他の変形例によれば、変調部及び発振器は、パルス圧縮方式または二周波連続波(continuous wave、CW)方式に従った探知信号を生成し、その探知信号に相当する探知波を送信アンテナから放射させてもよい。この場合、検波器及び物体情報算出部も、パルス圧縮方式または二周波CW方式に従って、レーダ装置に対する探知波を反射した物体の相対速度及びレーダ装置とその物体間の距離、及び反射波の信号電力を算出する。
さらにまた、一つの物体情報算出部が、二つの受信アンテナのそれぞれによって受信された反射波ごとに、検知した物体とレーダ装置間の距離及びレーダ装置に対する検知した物体の相対速度を算出してもよい。
【0040】
図5は、上記の一つの実施形態またはその変形例によるレーダ装置が組み込まれた路側器の概略構成図である。
路側器20は、例えば、交差点の近傍またはカーブする道路の近傍に設置される。そして路側器20は、例えば、道路上を走行し、かつ、何れかの方向から路側器20へ接近する移動物体の一例である車両を検知する。そして路側器20は、路側器20の通信可能範囲内に存在し、かつ、路側器20と無線通信可能な車載通信機を搭載した車両へ、車両を検知したことを通知する。
そのために、路側器20は、レーダ装置21と、制御部22と、変調部23と、アンテナ24と、インターフェース部25とを有する。
【0041】
レーダ装置21は、上記の実施形態またはその変形例によるレーダ装置である。このレーダ装置が有する送信アンテナからの探知波の放射方向及び二つの受信アンテナが検知する反射波の到来方向は、例えば、路側器20近傍の道路に沿った方向へ向けられる。そしてレーダ装置21は、道路上を走行している車両を検知する。レーダ装置21は、検知した車両が偏波面回転リフレクタを搭載した車両か否かを判定する。そしてレーダ装置21は、道路上を走行している車両を検知すると、その車両に対する上記の判定結果と、その車両と路側器20間の距離及びその車両の移動速度を含む車両検知情報を制御部22へ出力する。
【0042】
制御部22は、少なくとも一つのプロセッサと、メモリ回路とを有する。そして制御部22は、路側器20全体を制御する。
また路側器20の通信可能範囲内に存在する車載通信機との間で通信チャネルを設定する。そして制御部22は、レーダ装置21から車両検知情報を受け取ると、その車両検知情報を含む通知信号を生成する。制御部22は、通知信号に対してターボ符号化処理などの誤り訂正符号化処理を実行する。そして制御部22は、誤り訂正符号化された通知信号に対して、例えば、直交周波数分割多重(Orthogonal Frequency Division Multiplex、OFDM)方式といった所定の多重化方式に従って多重化する。制御部22は、多重化された通知信号を変調部23へ出力する。
【0043】
変調部23は、制御部22から受け取った通知信号をアナログ化する。そして変調部23は、アナログ化された通知信号を、無線周波数を持つ搬送波に重畳することにより無線信号を生成し、その無線信号を電力増幅器により増幅する。そして変調部23は、増幅された無線信号をアンテナ24を介して車載通信機へ向けて出力する。
このように、路側器20は、車載通信機を搭載した車両に対して、接近する車両が存在することを通知できる。特に、検知された移動物体が偏波面回転リフレクタを搭載した二輪車などの小型車両であるとの判定結果が通知されることにより、車載通信機を搭載した車両のドライバの死角に検知された小型車両が存在することを、そのドライバは知ることができる。そのため、路側器20は、いわゆる右直事故などを未然に防止することができる。
【0044】
インターフェース部25は、路側器20を通信ネットワークへ接続するためのインターフェース回路を有する。そしてインターフェース部25は、制御部22から受け取った車両検知情報及びその車両検知情報の取得時刻を所定の通信規格に従った信号に変換し、変換された信号を通信ネットワークへ向けて出力する。
なお、路側器20は、車載通信機からアンテナ24を介して無線信号を受信するようにしてもよい。
【0045】
図6は、上記の一つの実施形態またはその変形例によるレーダ装置が組み込まれた物体検知用車載装置の概略構成図である。
物体検知用車載装置30は、例えば、物体検知用車載装置30が搭載された車両へ接近する他の車両を検知する。そして物体検知用車載装置30は、検知した車両の種別に応じた警告処理をドライバに対して行う。
そのために、物体検知用車載装置30は、レーダ装置31と、制御部32と、記憶部33と、インターフェース部34とを有する。
【0046】
レーダ装置31は、上記の実施形態またはその変形例によるレーダ装置である。このレーダ装置が有する送信アンテナからの探知波の放射方向及び二つの受信アンテナが検知する反射波の到来方向は、例えば、物体検知用車載装置30が搭載された車両の後方へ向けられる。そしてレーダ装置31は、物体検知用車載装置30が搭載された車両へ接近する移動物体の一例である他の車両を検知する。レーダ装置31は、検知された車両が偏波面回転リフレクタを搭載した車両か否かを判定する。そしてレーダ装置31は、他の車両を検知すると、検知された車両に対する上記の判定結果を含む車両検知情報を制御部32へ出力する。なお、車両検知情報には、物体検知用車載装置30が搭載された車両と検知された車両間の距離及び物体検知用車載装置30が搭載された車両に対する検知された車両の相対的な移動速度が含まれてもよい。
【0047】
制御部32は、少なくとも一つのプロセッサ及びその周辺回路を有する。そして制御部32は、物体検知用車載装置30全体を制御する。
また制御部32は、レーダ装置31から車両検知情報を受け取る。さらに制御部32は、車両制御用電子制御ユニット(図示せず)から、インターフェース部34を介して、物体検知用車載装置30が搭載された車両の速度、ブレーキの踏み込み量、ウインカー操作の有無などを表す車両挙動情報を受け取る。そして制御部32は、例えば、車両検知情報及び車両挙動情報と、警告情報との関係を表す参照テーブルを参照して、車両検知情報及び車両挙動情報に応じた警告情報を記憶部33から読み込む。なお、制御部32は、車両検知情報と警告情報との関係を表す参照テーブルを参照して、車両検知情報に応じた警告情報を記憶部33から読み込んでもよい。
【0048】
例えば、車両検知情報に含まれる検知された車両の判定結果が、偏波面回転リフレクタが搭載された二輪車であることを示し、かつ、車両挙動情報が左折を示すウインカー操作が実行されていることを表しているとする。この場合、制御部32は、「二輪車が接近中です、注意して下さい」という警告メッセージを含む警告情報を記憶部33から読み込む。あるいは、車両検知情報に含まれる検知された車両の判定結果が、偏波面回転リフレクタが搭載されていない車両であることを示し、かつ、検知された車両が所定距離以内であるとする。この場合、制御部32は、「後方から車両が接近中です、急ブレーキを避けて下さい」という警告メッセージを含む警告情報を記憶部33から読み込む。
そして制御部32は、読み込んだ警告情報を、インターフェース部34を介して、車内に設置されたモニタ(図示せず)または運転支援装置(図示せず)へ出力する。
また制御部32は、車両検知情報を、インターフェース部34を介して、運転支援装置へ出力してもよい。
【0049】
記憶部33は、例えば、不揮発性のメモリ回路を有する。そして記憶部33は、参照テーブル及び警告情報を記憶する。さらに記憶部33は、車両検知情報を一定期間記憶してもよい。
【0050】
インターフェース部34は、コントロールエリアネットワーク(Control Area Network、CAN)などの規格に従った車内通信ネットワークに物体検知用車載装置30を接続するための通信インターフェース回路を有する。そしてインターフェース部34は、車内通信ネットワークを介して、モニタ(図示せず)、車両制御用電子制御ユニット(図示せず)または運転支援装置(図示せず)といった、車両に搭載された他の機器と通信する。そしてインターフェース部34は、車両制御用電子制御ユニットから、車両挙動情報を受け取り、その車両挙動情報を制御部32へ渡す。
あるいは、インターフェース部34は、制御部32から受け取った警告情報を車内設置モニタまたは運転支援装置へ出力する。さらにインターフェース部34は、制御部32から受け取った車両検知情報を運転支援装置へ出力してもよい。
【0051】
ここに挙げられた全ての例及び特定の用語は、読者が、本発明及び当該技術の促進に対する本発明者により寄与された概念を理解することを助ける、教示的な目的において意図されたものであり、本発明の優位性及び劣等性を示すことに関する、本明細書の如何なる例の構成、そのような特定の挙げられた例及び条件に限定しないように解釈されるべきものである。本発明の実施形態は詳細に説明されているが、本発明の精神及び範囲から外れることなく、様々な変更、置換及び修正をこれに加えることが可能であることを理解されたい。
【符号の説明】
【0052】
1 レーダ装置
2 変調部
3 発振器
4 送信アンテナ
5−1、5−2 受信アンテナ
6 制御部
7−1、7−2 検波器
8−1、8−2 物体情報算出部
9 判定部
10 インターフェース部
20 路側器
21 レーダ装置
22 制御部
23 変調部
24 アンテナ
25 インターフェース部
30 物体検知用車載装置
31 レーダ装置
32 制御部
33 記憶部
34 インターフェース部
【特許請求の範囲】
【請求項1】
第1の偏波面を持つ探知波を放射する送信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部と、
を有するレーダ装置。
【請求項2】
前記第1の反射波から前記第1の反射波を反射した物体と前記レーダ装置間の第1の距離を算出し、かつ前記第2の反射波から前記第2の反射波を反射した物体と前記レーダ装置間の第2の距離を算出する物体情報算出部をさらに有し、
前記判定部は、前記第1の距離と前記第2の距離との差の絶対値が、前記第1の反射波を反射した物体が前記第2の反射波を反射した物体と同一であると推定される第1の閾値未満である場合に、前記判定を行い、一方、当該差の絶対値が前記第1の閾値以上である場合、前記第1の反射波を反射した物体は前記第2の反射波を反射した物体と異なる物体であると判定する、請求項1に記載のレーダ装置。
【請求項3】
道路上に存在する物体を検知する路側器であって、
第1の偏波面を持つ探知波を前記道路に向けて放射する送信アンテナと、
前記探知波が前記道路上に存在する物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が前記道路上に存在する物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部と、を有するレーダ装置と、
前記レーダ装置により検知された物体及び当該物体が前記反射部材を搭載した車両か否かを表す判定結果とを含む検知情報を生成する制御部と、
前記検知情報を含む通知信号を所定の通信可能範囲内に存在する通信機へ送信するアンテナと、
を有する路側器。
【請求項4】
車両に搭載される車載装置であって、
第1の偏波面を持つ探知波を放射する送信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部と、を有するレーダ装置と、
前記レーダ装置により検知された物体が前記反射部材を搭載した車両か否かを表す判定結果を含む検知情報と警告情報との関係を表す参照テーブルを参照して所定の警告情報を特定する制御部と、
前記特定された警告情報を前記車両に搭載された他の機器へ出力するインターフェース部と、
を有する車載装置。
【請求項1】
第1の偏波面を持つ探知波を放射する送信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材であると判定する判定部と、
を有するレーダ装置。
【請求項2】
前記第1の反射波から前記第1の反射波を反射した物体と前記レーダ装置間の第1の距離を算出し、かつ前記第2の反射波から前記第2の反射波を反射した物体と前記レーダ装置間の第2の距離を算出する物体情報算出部をさらに有し、
前記判定部は、前記第1の距離と前記第2の距離との差の絶対値が、前記第1の反射波を反射した物体が前記第2の反射波を反射した物体と同一であると推定される第1の閾値未満である場合に、前記判定を行い、一方、当該差の絶対値が前記第1の閾値以上である場合、前記第1の反射波を反射した物体は前記第2の反射波を反射した物体と異なる物体であると判定する、請求項1に記載のレーダ装置。
【請求項3】
道路上に存在する物体を検知する路側器であって、
第1の偏波面を持つ探知波を前記道路に向けて放射する送信アンテナと、
前記探知波が前記道路上に存在する物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が前記道路上に存在する物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部と、を有するレーダ装置と、
前記レーダ装置により検知された物体及び当該物体が前記反射部材を搭載した車両か否かを表す判定結果とを含む検知情報を生成する制御部と、
前記検知情報を含む通知信号を所定の通信可能範囲内に存在する通信機へ送信するアンテナと、
を有する路側器。
【請求項4】
車両に搭載される車載装置であって、
第1の偏波面を持つ探知波を放射する送信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面を持つ第1の反射波を受信する第1の受信アンテナと、
前記探知波が物体によって反射された前記第1の偏波面から所定角度回転した第2の偏波面を持つ第2の反射波を受信する第2の受信アンテナと、
前記第2の反射波の信号電力が前記第1の反射波の信号電力よりも大きい場合、前記第2の反射波を反射した物体は探知波の偏波面を回転させる反射部材を搭載した車両であると判定する判定部と、を有するレーダ装置と、
前記レーダ装置により検知された物体が前記反射部材を搭載した車両か否かを表す判定結果を含む検知情報と警告情報との関係を表す参照テーブルを参照して所定の警告情報を特定する制御部と、
前記特定された警告情報を前記車両に搭載された他の機器へ出力するインターフェース部と、
を有する車載装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−18124(P2012−18124A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−156792(P2010−156792)
【出願日】平成22年7月9日(2010.7.9)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月9日(2010.7.9)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]