
レーダ装置および探知方法
【課題】反射波の中からマルチパスを判定し削減することで、その影響を低減し、目標物の検知精度を向上させるレーダ装置および探知方法を提供する。
【解決手段】 目標物を検知するレーダ装置であって、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、を備えるレーダ装置である。
【解決手段】 目標物を検知するレーダ装置であって、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、を備えるレーダ装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標物を検知するレーダ(Radio detection and ranging)装置および探知方法に関する。
【背景技術】
【0002】
レーダ装置は室内の目標物の識別、位置を確認する際などに利用されている。例えば、災害救助における瓦礫に埋もれた被災者の発見、テロ対策における建物内に潜伏しているテロリストを室外から知られること無く監視するといった用途への適用が期待されている。
【0003】
ところが、レーダ装置では、目標物(人など)から直接反射された反射波だけでなく、室内に配置された固定物(椅子、机)からの反射波や、人と固定物などの間で多重反射する複雑な経路を伝搬してくる反射波(マルチパス)も検知してしまう。目標物から直接反射された反射波以外に検出されるマルチパスの影響下で、目標物からの反射波だけを検出しようとしても、受信信号には様々な経路を経て到来するマルチパスが合成されている。そのため、受信信号から目標物からの直接反射された反射波だけを分離することは困難である。また、同一時刻にレーダ装置が受信する受信信号の波形は、複数の直接反射された反射波とマルチパスが位相合成されているため、受信信号のレベルが変動してフェージングが発生し、レーダ装置の目標物の検知能力を低下させる。
【0004】
なお、他の技術として、Digital Beam Forming(DBF)アレイアンテナを構成する複数のサブアレイ(N個)から送られる、モノパルス合成前のN×2個の位相中心の異なるサブアレイ信号を用いて、多次元の信号処理を実施して、マルチパス環境下で不要波を抑圧する提案がされている。
【0005】
また、マルチパスが問題となる無線通信の分野では、固定通信における対策としては送受信機の位置が既知であることから、受信した時間により最短の経路を伝搬した電波を検出することでマルチパスの影響を排除することが可能である。しかし、未知の目標物を検出するレーダ装置には適用することは困難である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−98999号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記のような実情に鑑みてなされたものであり、マルチパスの影響を低減させ、目標物の検知精度を向上させるレーダ装置および探知方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
実施態様のひとつである遮蔽物越しの目標物を検知するレーダ装置は、固定物検出部、目標物検出部、経路判別部を備えている。
目標物検出部は、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する。
【0009】
経路判別部は、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する。
【発明の効果】
【0010】
実施の態様によれば、マルチパスの影響を低減させ、目標物の検知精度を向上させるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】透過型レーダ装置の構成の一例を示す図である。
【図2】マイクロ波帯のパルス波形とインパルス波形の一例を示す図である。
【図3】処理部の動作の一例を示すフロー図である。
【図4】Aは部屋の間取り図(図面データ)の一例を示す図であり、Bは間取り図に対応する周辺構造情報の一例を示す図である。
【図5】アンテナで受信した反射波の概要を示す三次元グラフの一例を示す図である。
【図6】Aはサンプリング距離ごとに短時間フーリエ変換を行った演算結果の波形の一例を示す図であり、Bは振幅変動情報のデータ構造の一例を示す図である。
【図7】測角処理の計算を説明するための一例を示す図である。
【図8】A,Bは固定物位置情報の一例を示す図であり、C,Dは目標物位置情報の一例を示す図である。
【図9】室内で想定される電波の伝搬経路(パス)を示す図である。
【図10】経路判別部の動作の一例を示すフロー図である。
【図11】経路判別部の動作の一例を示すフロー図である。
【図12】本実施形態がコンピュータプログラムとして実現される場合の構成の一例を示す図である。
【発明を実施するための形態】
【0012】
以下図面に基づいて、本実施形態について詳細を説明する。
(実施形態1)
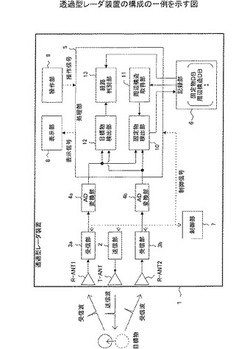
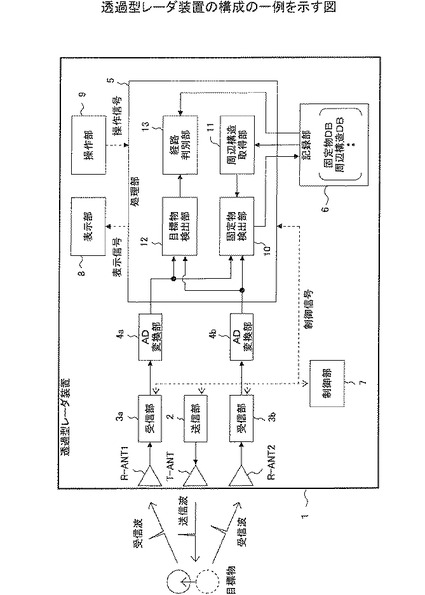
図1は、透過型レーダ装置の構成の一例を示す図である。実施形態1では、レーダ装置として、透過型レーダ装置を用いた場合について説明する。ただし、レーダ装置は、透過型レーダ装置に限定されるものではなく、マルチパスの影響を受けるレーダ装置であれば限定されるものではない。また、透過型レーダ装置の送受信波は、遮蔽物(壁など)、固定物(机、椅子など)を透過する電波と、反射する電波を含んでいる。
【0013】
実施形態1の透過型レーダ装置1は、アンテナT−ANT、R−ANT1、R−ANT2、送信部2、受信部3a、3b、AD変換部4a、4b、処理部5、記録部6、制御部7、表示部8、操作部9を備えている。アンテナT−ANTは、送信部2から予め決められた間隔で送信されるマイクロ波帯のインパルス波を、監視方向に送信する送信アンテナである。例えば、マイクロ波帯のインパルスは幅1ns以下(15cm相当)であることが好ましい。なお、パルス幅を短くすればするほど、時間分離能力が向上するため、直接波から遅延して到着するマルチパスを分離し易くなる。
【0014】
なお、実施形態1では、目標物として人などを対象としているため、インパルスを用いているが、例えば、対象にする目標物が車両などのインパルスを用いなくてもよい場合には、インパルスを必ずしも用いなくてもよい。
【0015】
アンテナR−ANT1は、アンテナT−ANTから送信されたインパルスが目標物、固定物などによりに反射した反射波を受信し、受信した反射波を受信信号として受信部3aに供給する。また、アンテナR−ANT2は、アンテナR−ANT1と離れて配置され、アンテナT−ANTから送信されたインパルスが目標物、固定物などによりに反射した反射波を受信し、受信した反射波を受信信号として受信部3bに供給する。
【0016】
なお、固定物は、例えば室内に配置されたテーブルや椅子などのように、必ずしも一定の場所に固定されていないが、人などのように移動をしないものである。
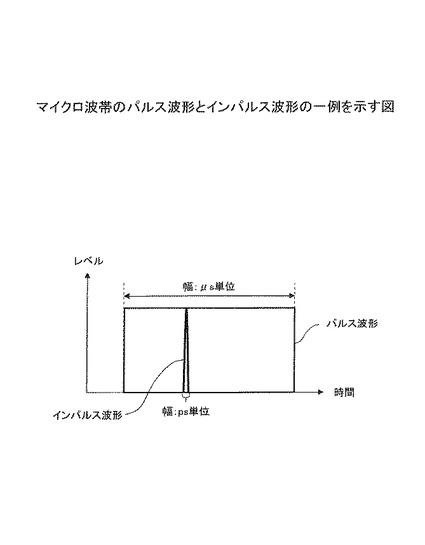
図2は、マイクロ波帯のパルス波形とインパルス波形を示す図である。図2では、縦軸にレベル、横軸に時間を示し、1〜数μsec幅のパルス波形と、1〜数psec幅のインパルス波形が示されている。透過型レーダ装置1は、ある時間幅をもつパルス波を送信して、目標物に反射したパルス波を受信するまでの時間により、目標物までの距離を計測する。屋外においてレーダ装置を使用する場合であれば、例えばパルス波のパルス幅をμsec単位にし、数十m〜数百mの距離を計測する設定にする。このパルス幅の設定は、パルス幅が分離できる複数目標物の最小間隔も決めている。従って、室内で使用する場合は、部屋の大きさが数m((1(m)×2/3)108(m/sec)=(6.7)10−9(sec)相当)で目標物となる人などの厚みは、数十cm(2〜3nsec相当)程度である。そこで、室内で目標物を検出するためには、パルス波のパルス幅を2〜3nsec以下に狭める必要があり、波長が短いレーザ(周波数が高い:1/(数nsec)=数百MHz)を使用したりして、レーダ機能を実現している。しかし、レーザなどを用いて遮蔽物越しに目標物を検知する場合、壁などの障害物があると回折、散乱が起こり、壁を透過させることは困難である。そこで、実施形態1の透過型レーダ装置1では、壁(コンクリート、木材など)を通過することが可能であるマイクロ波帯のインパルスを用いる。なお、上記コンクリート、木材以外の材質であっても、目標物までの距離と遮蔽物の材質による減衰とのトレードオフを考慮することにより、透過させることが可能である。例えば、遮蔽物が煉瓦などであってもよい。
【0017】
また、本例ではアンテナT−ANTは、アンテナ走査せずに、アンテナT−ANTの正面から前面に、ビーム幅相当の送信信号を満遍なく放射する。なお、アンテナT−ANTをアンテナ走査して送信信号(インパルス)を送信してもよい。
【0018】
送信部2は、予め決められた幅のインパルスを予め決められた周期でアンテナT−ANTに供給する指示(制御信号)を制御部7から受信する。そして、送信部2は、受信した制御信号に従ってしてアンテナT−ANTにインパルスを供給する。
【0019】
受信部3aは、アンテナR−ANT1が受信した反射波を制御部7の指示(制御信号)に従い受信して、AD変換部4aに送信する。ここで、受信部3aに送信される制御信号は、インパルス送信時にアンテナR−ANT1が供給した信号を排除する指示と、予め決められた期間に受信した反射波だけを受信する指示を含んでいる。受信部3bは、アンテナR−ANT2が受信した反射波を制御部7の指示(制御信号)に従い受信して、AD変換部4bに送信する。ここで、受信部3bに送信される制御信号は、受信部3aに送信される制御信号と同じであり、受信部3aと受信部3bは同期して動作する。
【0020】
AD変換部4a、4bは、アナログ/ディジタル変換器である。例えば、等価変換サンプリングなどを用いることが好ましい。
処理部5は、固定物検出部10、周辺構造取得部11、目標物検出部12、経路判別部13などを備えている。また、処理部5はCentral Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いて処理部5の機能を実行させてもよい。なお、処理部5の詳細については後述する。
【0021】
記録部6は、プログラム、テーブル、データなどが記録されている。また、記録部6は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)、ハードディスクなどのメモリである。また、記録部6は、パラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。本例では、記録部6に、固定物データベース、周辺構造データベースなどが記録されている。なお、記録部6の詳細については後述する。
【0022】
制御部7は、透過型レーダ装置の各部を制御し、CPUやプログラマブルなデバイスを用いて、各部の制御を行う。
表示部8はディスプレイなどであり、処理部5、制御部7などからの命令に従ってディスプレイの画面上の操作などに用いる情報を表示する。操作に用いる情報は、例えば、利用者が透過型レーダ装置1の操作、計測時の設定、初期設定などをするときに用いる情報である。また、表示部8は、透過型レーダ装置の探知した結果である表示情報をディスプレイに表示するときに用いる。表示情報は、記録部6に記録されている固定物データベース、周辺構造データベースなどから取得したデータと、処理部5で求めた探知結果に基づいて、生成された画像情報などである。なお、表示方法は限定するものではないが、例えば、2次元表示、3次元表示などをすることが好ましい。
【0023】
操作部9はタッチパネル、キーボード、およびマウスなどであり、表示部8のディスプレイに表示された情報などに従って、透過型レーダ装置1の操作に用いる情報などを入力する。例えば、利用者が透過型レーダ装置1の操作、計測時の設定、初期設定などをするときに用いる。
【0024】
処理部5について説明する。
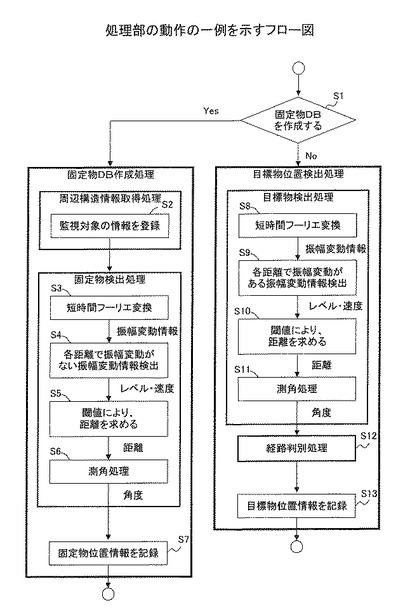
図3は、処理部5の動作の一例を示すフロー図である。ステップS1では、処理部5が記録部6を検索し、対象とする探知範囲の固定物データベースが作成されているか否かを判定する。既に、固定物データベースが作成されていればステップS8に移行し、作成されていなければステップS2に移行する。対象の探知範囲とは、遮蔽物(壁など)に囲まれた空間であり、例えば、監視対象の室内などのことである。
【0025】
ステップS2〜ステップS7では、固定物データベースの作成について説明する。
(周辺構造情報取得処理の説明)
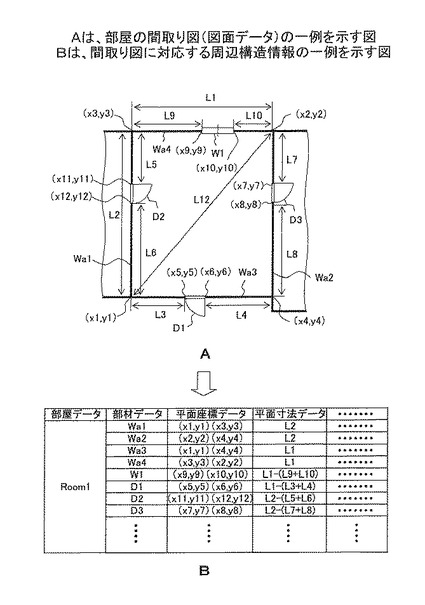
ステップS2で周辺構造取得部11が、探知する対象の範囲(室内など)の間取り図に対応するデータ(周辺構造情報:図面データなど)を取得して、該データを記録部6の周辺構造データベースに登録する。図4のA、Bに周辺構造データベースに記録されている周辺構造情報のデータ構造の一例を示す。図4のAは、例えば部屋の間取り図(図面データ)であり、図4のBは、例えば図4のAの間取り図に対応する周辺構造情報を示している。図4のBの周辺構造情報は、「部屋データ」「部材データ」「平面座標データ」「平面寸法データ」などの情報を有している。「部屋データ」には部屋の識別するための「Room1」・・・・が記録され、「部材データ」には部材の識別するための「Wa1」「Wa2」「Wa3」「Wa4」「W1」「D1」「D2」「D3」・・・・が記録されている。なお、Waは壁を示し、Wは窓を示し、Dはドアを示している。また、壁、窓、ドア以外にも、天井、照明なども部材データとして記録してもよい。また、「平面座標データ」には部材の位置座標を示す「(x1,y1)(x3,y3)」「(x2,y2)(x4,y4)」「(x1,y1)(x4,y4)」・・・・などが記録されている。また、「平面寸法データ」には部材の寸法を示す「L2」「L2」「L1」「L1」「L1−(L9+L10)」・・・・などが記録されている。なお、周辺構造情報として、CAD(Computer aided design system)などにより作成したデータを用いてもよい。また、上記説明では2次元の場合の周辺構造情報について示したが、周辺構造情報に、さらに高さに関する情報などを付加して3次元の周辺構造情報を用いてもよい。
【0026】
(固定物検出処理の説明)
固定物検出部10は、上記周辺構造に示したような移動が簡単にできないものでなく、例えば、室内に配置されたテーブルや椅子などのように、必ずしも一定の場所に固定されていないが、人などのように移動をしないものである。
【0027】
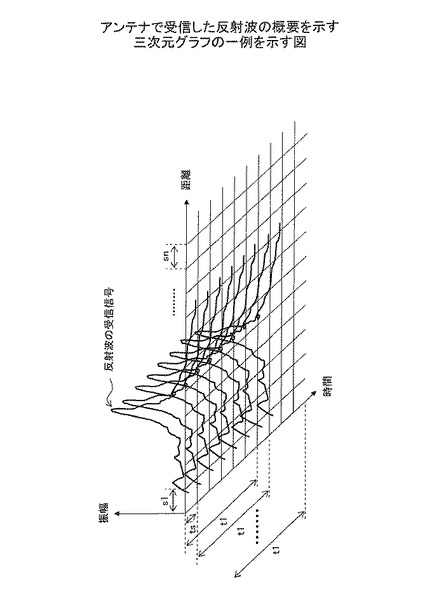
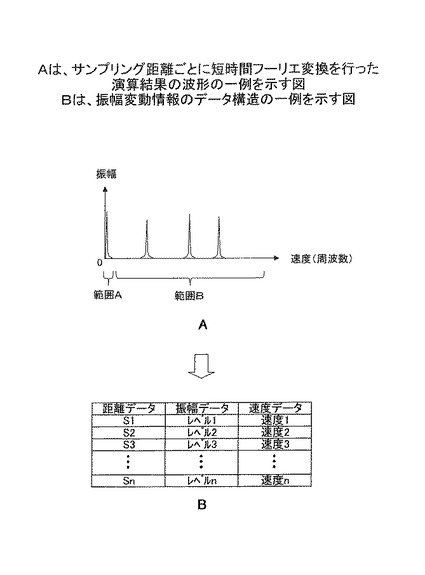
図3のステップS3で固定物検出部10が、AD変換部4aまたはAD変換部4bから取得したディジタル信号に対して短時間フーリエ変換を行う。例えば、固定物検出部10は、AD変換後のディジタル信号を、固定物検出部10のFIFO(First In First Out)バッファなどに、予め設定した周期t1(処理周期)で一時保管する。予め設定した周期t1分のデータが蓄えられたら、記録部6へ予め設定した周期t1単位で格納する。次に、格納したデータを読み出し、予め設定した周期t1内で短時間フーリエ変換を行う。図5は、アンテナR−ANT1またはアンテナR−ANT2で受信した反射波の概要を示す三次元グラフである。図5の三次元グラフはX軸に距離、Y軸に時間、Z軸に振幅が示されている。図5の期間tsはインパルスを送信してから次のインパルスを送信するまでの、予め設定した期間を示し、サンプリング距離(S1〜Sn)は、予め決められた距離を示し、例えば、S1=0〜10cm、S2=11〜20cm・・・・としている。図5の例では、ディジタル信号に変換された受信信号を周期t1分、期間tsごとに取得し、この取得した周期t1分のディジタル信号に対して、サンプリング距離ごとに短時間フーリエ変換を行う。図6のAには、サンプリング距離ごとに短時間フーリエ変換を行った演算結果の波形が示されており、縦軸には振幅、横軸には速度(周波数)が示されている。固定物の場合には移動しないため、振幅が範囲A(速度が0に近い)に表れる。目標物が移動している場合には、振幅が範囲Bに表れる。
【0028】
次に、固定物検出部10は短時間フーリエ変換の演算結果の振幅値をサンプリング距離S1〜Snに関連付けて振幅変動情報を生成し、記録部6などに記録する。振幅変動情報のデータ構造は、例えば図6のBに示すように、「距離データ」「振幅データ」「速度データ」を有している。「距離データ」にはサンプリング距離を示す「S1」「S2」・・・「Sn」が記録され、「振幅データ」には振幅を示す値が記録され、本例では便宜上振幅値として「レベル1」「レベル2」・・・「レベルn」と示す。「速度データ」には速度を示す値が記録され、本例では便宜上速度値として「速度1」「速度2」・・・「速度n」と示す。
【0029】
図3のステップS4では、固定物検出部10がサンプリング距離ごとに振幅変動がない振幅変動情報検出する。図6のAの例であれば、固定物検出部10は、範囲Aの範囲の振幅変動情報を検出する。
【0030】
ステップS5では、固定物検出部10がステップS4で求めた振幅変動情報に基づいて距離を求める。すなわち、アンテナT−ANTから固定物(図7のTarget)を介してアンテナR−ANT1までの距離を求める。また、固定物検出部10は、アンテナT−ANTから固定物(図7のTarget)を介してアンテナR−ANT2までの距離を求める。
【0031】
図6のBの場合であれば、固定物検出部10が距離データS1〜Snに関連付けられた振幅データから、予め設定した閾値以上の振幅値を抽出する。そして、抽出した振幅値に関連付けられた距離データを検出する。
【0032】
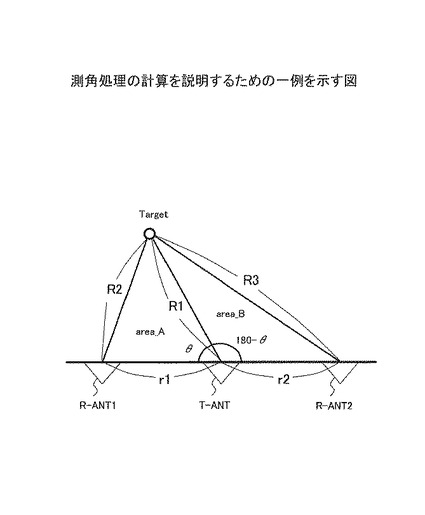
ステップS6では、固定物検出部10がステップS5で求めた各距離データに基づいて測角処理をして固定物の方位角θ(方位)を求める。図7の例では、方位角θはアンテナT−ANTとアンテナR−ANT1を結ぶ直線と、アンテナT−ANTとTargetを結ぶ直線のなす角度である。また、図7に示すように、アンテナT−ANTから送信してアンテナR−ANT1で受信する経路長をL1とすると、L1は式1で示すことができる。
【数1】

【0033】
また、アンテナT−ANTから送信してアンテナR−ANT1で受信する経路長をL2とすると、L2は式2で示すことができる。
【数2】
【0034】
図7のarea_Aの三角形は三角関数の関係から、式3で示すことができる。r1はアンテナT−ANTからアンテナR−ANT1までの距離であり、r2はアンテナT−ANTからアンテナR−ANT2までの距離である。
【数3】
【0035】
図7のarea_Bの三角形は三角関数の関係から、式4で示すことができる。
【数4】
【0036】
次に、式1、式2をそれぞれ変形して式5、式6を求める。
【数5】
【数6】
【0037】
式5を式3に代入して変形して式7が求まる。
【数7】
【0038】
また、式6を式4に代入して変形すると式8が求まる。
【数8】
【0039】
次に、式7と式8より式9を求める。
【数9】
【数10】
となり、式9を式7または式8に代入すると、アンテナT−ANTから固定物までの距離R1と、アンテナT−ANTの位置から固定物までの方位角θが算出できる。そして、距離R1と方位角θに基づいて固定物の位置座標を算出する。なお、他の方位角算出方法としてモノパルス測角を用いてもよい。
【0040】
ステップS7では、記録部6の固定物データベースに固定物位置情報を記録する。固定物位置情報は、例えば、ステップ6で算出した距離R1、方位(方位角θ)に基づいて算出した位置座標を有している。また、距離と方位についてのデータを有していてもよい。
【0041】
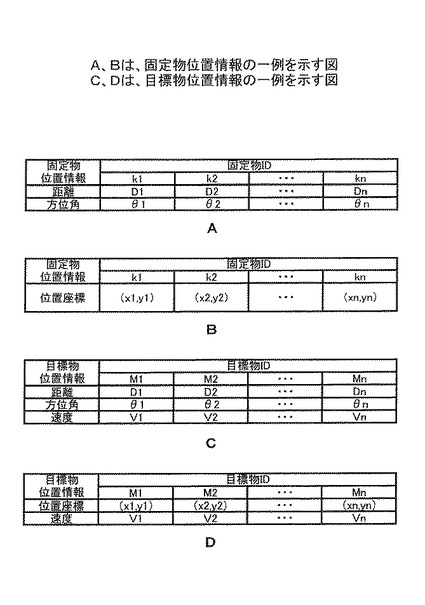
図8のA、Bに固定物データベースを示す。固定物データベースは、固定物ごとに割り振られた識別子に、対応する固定物位置情報を関連付けて、記録部6などに記録されている。図8のAの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「k1」「k2」・・・「kn」が記録され、「距離」にアンテナT−ANTから固定物までの距離を示す「D1」「D2」・・・「Dn」が記録されている。また、「方位角」にアンテナT−ANTと固定物との方位(方位角)を示す「θ1」「θ2」・・・「θn」が記録されている。また、図8のBの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「k1」「k2」・・・「kn」が記録されている。また、「位置座標」にアンテナT−ANTの位置を基準点とした固定物の位置座標(方位)を示す「(x1,y1)」「(x2,y2)」・・・「(xn,yn)」が記録されている。なお、図8のA、Bのデータにさらに、固定物の「奥行き」「幅」「高さ」などのデータを付加してもよい。
【0042】
上記のように、記録部6に固定物位置情報と周辺構造情報を記録して、固定物で反射される複雑な多重反射マルチパスを推定するために用いる固定物データベース、周辺構造データベースを作成する。なお、固定物位置情報と周辺構造情報により室内の固定物の配置をマップ化して、固定物マップを生成してもよい。
【0043】
(目標物検出処理の説明)
ステップS8〜ステップS13では、移動する目標物の位置検出について説明する。ステップS8では、目標物検出部12がAD変換部4aまたはAD変換部4bから取得したディジタル信号に対して短時間フーリエ変換を行う。短時間フーリエ変換はステップS3で説明したように処理を行う。なお、本例では目標物検出部12においても短時間フーリエ変換をしているが、固定物検出部10でも同じように短時間フーリエ変換をしているので、短時間フーリエ変換処理を共用してもよい。
【0044】
ステップS9では、目標物検出部12がサンプリング距離ごとに振幅変動がある振幅変動情報を検出する。図6のAの例であれば、目標物検出部12は、範囲Bの範囲の振幅変動情報を検出する。
【0045】
ステップS10では、目標物検出部12がステップS9で求めた振幅変動情報に基づいて距離を求める。すなわち、アンテナT−ANTから移動する目標物(図7のTarget)を介してアンテナR−ANT1までの距離を求める。また、目標物検出部12は、アンテナT−ANTから移動する目標物(図7のTarget)を介してアンテナR−ANT2までの距離を求める。
【0046】
図6のBの場合であれば、目標物検出部12が距離データS1〜Snに関連付けられた振幅データから、予め設定した閾値以上の振幅値を抽出する。そして、抽出した振幅値に関連付けられた距離データを検出する。
【0047】
ステップS11では、目標物検出部12がステップS10で求めた各距離データに基づいて測角処理を行い移動する目標物の方位を求める。ここで、測角処理はステップS6で説明したようにアンテナT−ANTから固定物までの距離R1と、アンテナT−ANTの位置から移動する目標物までの方位角θが算出できる。そして、距離R1と方位角θに基づいて移動する目標物の位置座標を算出する。上記ステップS8〜S11(目標物検出処理)により、移動する目標物の位置を求めることができる。また、上記ステップS8〜S11(目標物検出処理)により、遮蔽物で囲まれた空間(室内など)において、移動する目標物からの反射波を移動速度に応じて生ずる周波数に基づいて判別して、移動する目標物を抽出することができる。
【0048】
図8のC、Dに目標物データベースを示す。目標物データベースは、移動する目標物ごとに割り振られた識別子に、対応する目標物の位置情報を関連付けて、記録部6などに記録している。図8のCの場合であれば、目標物ごとに割り振られた識別子「目標物ID」に「M1」「M2」・・・「Mn」が記録され、「距離」にアンテナT−ANTから目標物までの距離を示す「D1」「D2」・・・「Dn」が記録されている。また、「方位角」にアンテナT−ANTと固定物との方位(方位角)を示す「θ1」「θ2」・・・「θn」が記録されている。また、「速度」に移動する目標物の速度を示す「V1」「V2」・・・「Vn」が記録されている。また、図8のDの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「M1」「M2」・・・「Mn」が記録されている。また、「位置座標」にアンテナT−ANTの位置を基準点とした目標物の方位(位置座標)を示す「(x1,y1)」「(x2,y2)」・・・「(xn,yn)」が記録されている。なお、図8のC、Dのデータにさらに、目標物の「奥行き」「幅」「高さ」などのデータを付加してもよい。
【0049】
ステップS12では、経路判別部13が受信した反射波からマルチパスを検出して、マルチパスの影響を受けていない移動する目標物の反射波を抽出する処理を行うとともに、移動する目標物の位置を推定する。ステップS13では、経路判別部13が推定した目標物の位置に関する目標物位置情報を記録部6に記録する。なお、ステップS12、S13の詳細は後述する。
【0050】
(経路判別処理の説明)
図9、図10、図11を用いて経路判別処理について説明する。
図9は、室内で想定される電波の伝搬経路(パス)を示す図である。図9では、Target(移動する目標物:人など)から直接反射する経路(経路1)、固定物k2から直接反射する経路(経路2)、固定物k1からのマルチパス(経路3)、Targetと固定物k2間のマルチパス(経路4)が挙げられる。図10、図11は、経路判別部の動作の一例を示すフロー図である。
【0051】
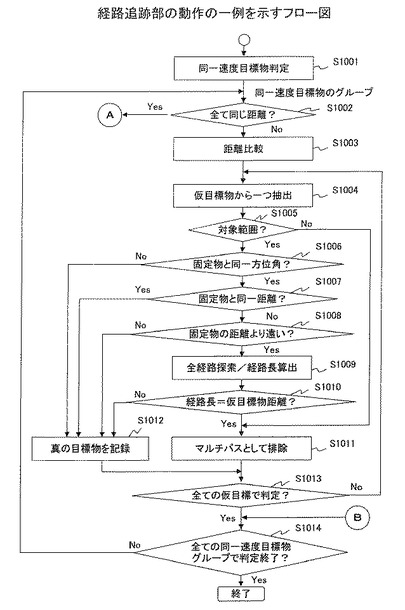
ステップS1001では、経路判別部13が上記ステップS8〜S11(目標物検出処理)により検出した目標物位置情報から同一速度の目標物を抽出し、同一速度の目標物位置情報をグループ化する。上記ステップS8〜S11(目標物検出処理)で抽出した目標物位置情報にはマルチパスも含まれている。つまり、移動する目標物に反射したマルチパスは、移動する目標物と同じ速度を示すことから、目標物位置情報から同一速度の目標物を探索し、速度ごとに目標物位置情報をグループに分ける。なお、同じ速度の目標物がない移動する目標物は、マルチパスの影響を受けていないことになる。そのため、その移動する目標物に対応する目標物位置情報は、移動する目標物から直接反射した反射波に基づいて生成されたものであると判定できる。よって、経路判別部13は該目標物位置情報を記録部6に記録する。なお、図9において固定物だけが関係するマルチパス(経路2)(経路3)は、上記ステップS8〜S11(目標物検出処理)により、既に排除されている。
【0052】
ステップS1002では、経路判別部13がグループ化された速度が同じ複数の目標物位置情報の距離が同じかを判定する。同じである場合(Yes)にはステップS1101に移行し、異なる場合(No)にはステップS1003に移行する。
【0053】
ステップS1003で経路判別部13は、速度が同じグループ内の距離が異なると判定され、複数の目標物のなかで最短距離の目標物を基準目標物に設定する。複数の目標物のなかで最短距離になる目標物は、伝搬経路が一番短いため、移動する目標物から直接反射した反射波に基づいて生成された目標物位置情報に対応する目標物(真の目標物)と判定できる。その他の目標物は、それぞれが真の目標物である可能性と、マルチパスに基づいて生成された目標物位置情報に対応した目標物である可能性があるので、これらの目標物を仮目標物に設定する。なお、経路判別部13は、基準目標物に対応する目標物位置情報を記録部6に記録する。
【0054】
ステップS1004で経路判別部13は、仮目標物に対応する目標物位置情報をひとつ取得する。
なお、経路判別部13は、仮目標物に対応する目標物位置情報が真の目標物かマルチパスかの判定を、全仮目標物に対応する目標物位置情報に対して行なう。判別するマルチパスは最終反射が固定物によるものを対象とし、最後に移動物で反射したマルチパスは判別対象としない。
【0055】
ステップS1005において経路判別部13は、仮目標物が対象の探知範囲(室内など)に存在するかを判定する。対象の探知範囲に存在する場合(Yes)は、ステップS1006に移行し、対象の探知範囲に存在しない場合(No)は、ステップS1011に移行する。仮目標物が、上記図面などから作成した固定物マップ内に存在しない場合はマルチパスと考えられるので排除する。対象の探知範囲に存在するか否かの判定は、例えば、仮目標物に対応する目標物位置情報の方位角と固定物マップを用い、透過型レーダ装置1から対象の探知範囲内の仮目標物が存在する方位の距離を求める。そして、該求めた距離が仮目標物までの距離より小さいと判定されたとき、対象の探知範囲に存在すると判定する。
【0056】
ステップS1006では、経路判別部13が仮目標物の方位に固定物が存在するかを、固定物マップを参照して判定する。仮目標物の方位に固定物が存在する場合(Yes)、ステップS1007に移行し、存在しない場合(No)、ステップS1012に移行する。存在しないの場合、対象の探知範囲(室内など)の固定物が無い方位からの移動する目標物からの反射波はマルチパスではないと判定する(真の目標物からの反射と判定する)。なお、本実施態様のレーダ計測において、目標物と固定物が同一方向にあってもインパルス幅相当以上の距離があれば、固定物と目標物を分離できるため、固定物と目標物の判別は可能である。
【0057】
ステップS1007では、経路判別部13が固定物と仮目標物の方位が同じ場合、距離も同一かを判定する。同一の場合(Yes)、ステップS1012に移行する。固定物と同じ位置からの移動する目標物の反射は、移動する目標物から固定物への伝搬経路が取れない(伝搬時間が無い)ため、真の目標物からの反射と判定する。同一でない場合(No)、ステップS1008に移行する。
【0058】
ステップS1008において、経路判別部13は仮目標物が固定物より距離が遠いかを判定する。距離が遠い場合(Yes)、ステップS1009に移行する。距離が近い場合(No)、ステップS1012に移行する。固定物によるマルチパスは必ず固定物より遠距離に見えるので、固定物より近い移動する目標物は真の目標物であると判定する。
【0059】
ステップS1009では、経路判別部13が固定物マップを用いて、最初に基準目標物で反射し、さらに1つ以上の固定物で反射した反射波の経路を全て探索する。探索した全ての経路の経路長を固定物マップ、基準目標物に対応する目標物位置情報の方位と距離(または、位置座標)などを用いて既存の技術により算出する。
【0060】
ステップS1010において、経路判別部13は固定物と同一方向で、固定物より遠くにあると判定されている仮目標物の距離と、最初に真の目標物で反射し、さらに1つ以上の固定物で反射した経路長の何れかと経路長が等しいかを判定する。等しいときマルチパスと判定して(Yes)、ステップS1011に移行し、等しくないとき(No)ステップS1012に移行する。
【0061】
ステップS1011では、経路判別部13がマルチパスであると判定された対象の仮目標物の目標物位置情報を記録部6から削除する。または、対象の仮目標物の目標物位置情報にマルチパスであることを示すフラグなどを立てる。
【0062】
ステップS1012で経路判別部13は、対象の仮目標物の目標物位置情報が真の目標物であることを記録部6に記録する。例えば、目標物位置情報に真の目標物であることを示すフラグなどを立てる。
【0063】
ステップS1013では、経路判別部13がステップS1003で設定した仮目標物の目標物位置情報すべてに対して、ステップS1004〜S1012の処理を行ったかを判定する。設定した仮目標物すべてに対して判定が終了していればステップS1014に移行し、終了していなければステップS1004に移行する。
【0064】
ステップS1014では、経路判別部13がステップS1001で設定した同一速度目標物の目標物位置情報グループすべてに対して、ステップS1002〜S1013、後述する1101〜S1110の処理を行ったかを判定する。設定した同一速度目標物位置情報のグループすべてに対して判定が終了していればこのフローを終了し、終了していなければステップS1002に移行する。
【0065】
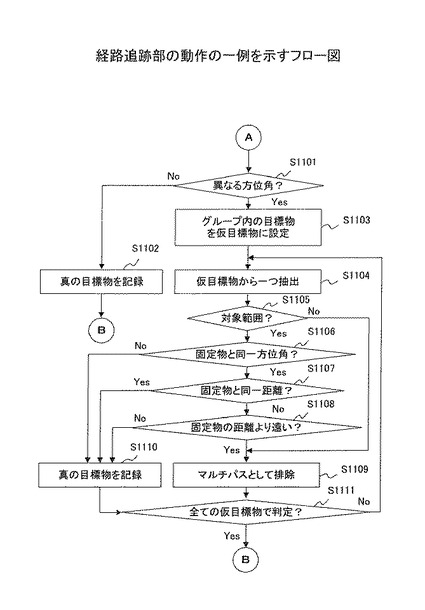
次に、ステップS1002において経路判別部13がグループ化された速度が同じ複数の目標物位置情報の距離が異なる場合(No)に、ステップS1002に移行した場合について説明する。
【0066】
ステップS1101で経路判別部13は、グループ化された速度が同じ複数の目標物位置情報に基づいて、同じ方向の目標物位置情報を振り分け、同じ方向の目標物位置情報が複数ある場合(Yes)、ステップS1103に移行する。同じ方向の目標物位置情報がない場合(No)、ステップS1102に移行する。
【0067】
ステップS1102では、経路判別部13がステップS1101で振り分けられた同じ方向の目標物位置情報がない目標物位置情報を、真の目標物として記録部6に記録する。例えば、報に真の目標物であることを示すフラグなどを立てる。
【0068】
ステップS1103では、経路判別部13がグループ内の目標物を仮目標物に設定する。同じ距離で方位の異なる移動する目標物は、それぞれの複数の目標物でのマルチパスの影響があるため、それぞれを仮目標物とする。仮目標物が真の目標物かマルチパスかの判定は、すべての仮目標物に目標物位置情に対して判定を行なう。なお、判別するマルチパスは最終反射が固定物によるものを対象とする(最後に移動物で反射したマルチパスは判別対象としない)。
【0069】
ステップS1104では、経路判別部13が仮目標物に対応する目標物位置情報をひとつ取得する。
ステップS1105で経路判別部13は、仮目標物が対象の探知範囲(室内など)に存在するかを判定する。対象の探知範囲に存在する場合(Yes)は、ステップS1106に移行し、対象の探知範囲に存在しない場合(No)は、ステップS1109に移行する。仮目標物が、固定物マップ内に存在しない場合はマルチパスと考えられるので排除する。
【0070】
ステップS1106では、経路判別部13が仮目標物の方位に固定物が存在するかを判定し、存在する場合(Yes)は、ステップS1107に移行し、存在しない場合(No)は、ステップS1110に移行する。対象の探知範囲の固定物が無い方位からの移動物反射は、マルチパスではなく真の目標物からの反射波と判定する。
【0071】
ステップS1107で経路判別部13は、固定物の距離と、仮目標物の方位に固定物が存在する仮目標物の距離が、同じであるかを判定する。同じ場合(Yes)は、ステップS1110に移行し、同じでない場合(No)は、ステップS1108に移行する。固定物と同じ位置からの移動する目標物の反射は、移動する目標物から固定物への伝搬経路が取れない(伝搬時間が無い)ため、真の目標物からの反射と判定する。
【0072】
ステップS1108では、経路判別部13が固定物の距離より仮目標物の距離が遠いかを判定し、遠いい場合(Yes)はステップS1109に移行し、近い場合(No)はステップS1110に移行にはする。固定物によるマルチパスは必ず固定物より遠距離に見えるので、固定物より近い移動する目標物の反射は真の目標物であると判定する。
【0073】
ステップS1109では、経路判別部13がマルチパスであると判定された対象の仮目標物の目標物位置情報を記録部6から削除する。または、対象の仮目標物の目標物位置情報にマルチパスであることを示すフラグなどを立てる。
【0074】
ステップS1110で経路判別部13は、対象の仮目標物の目標物位置情報が真の目標物であることを記録部6に記録する。例えば、目標物位置情報に真の目標物であることを示すフラグなどを立てる。
【0075】
ステップS1111では、経路判別部13がステップS1103で設定した仮目標物の目標物位置情報すべてに対して、ステップS1104〜S1110の処理を行ったかを判定する。設定した仮目標物の目標物位置情報すべてに対して判定が終了していれば図10のステップS1014に移行し、終了していなければステップS1104に移行する。
【0076】
上記説明した処理により、時間領域だけでは分離できなかったマルチパスと真の目標物からの反射波の判別することができる。すなわち、時間(距離)の1次元に周波数(速度)と空間の次元を組合せた多次元情報を用いることにより、目標物から直接反射した反射波とマルチパスを判別することができる。具体的には、上記説明した図10、図11に示したフロー図に示した処理により、図9に示した固定物に関係するマルチパス(経路2、3)の影響だけでなく、マルチパス(経路4)の影響も排除される。その結果、最終的に真の目標物から直接反射された反射波(経路1)を抽出することができる。また、マルチパス(経路2、3)の影響だけでなく、マルチパス(経路4)の影響も排除することで、マルチパスの影響を低減し、実際に移動している目標物の検出確率を向上させることができる。そのため、レーダ性能向上が望め、運用時の装置の信頼性、確実性が高まる。
【0077】
(本実施形態がコンピュータプログラムとして実現される場合の構成)
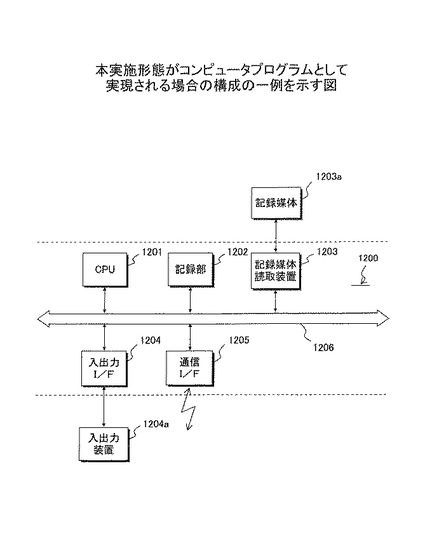
図12は、上記実施形態のレーダ装置の処理部5を実現できるコンピュータのハードウェア構成の一例を示す図である。
【0078】
コンピュータのハードウェア1200は、CPU1201、記録部1202(ROM、RAM、ハードディスクドライブなど)、記録媒体読取装置1203、入出力インタフェース1204(入出力I/F)、通信インタフェース1205(通信I/F)などを備えている。また、上記各構成部はバス1206によってそれぞれ接続されている。
【0079】
CPU1201は、記録部1202に格納されている上記説明した透過型レーダ装置1の図3、10、11などに示した各処理を実行する。また、CPU1201は上記説明した処理部5の機能を有する。
【0080】
記録部1202には、CPU1201が実行するプログラムやデータが記録されている。また、ワークエリアなどとして使用される。また、記録部1202は上記説明した記録部6の機能を有する。
【0081】
記録媒体読取装置1203は、CPU1201の制御にしたがって記録媒体1203aに対するデータのリード/ライトを制御する。そして、記録媒体1203aに記録媒体読取装置1203の制御で書き込まれたデータを記憶させたり、記録媒体1203aに記憶されたデータを読み取らせたりする。また、着脱可能な記録媒体1203aは、コンピュータで読み取り可能な記録媒体として、磁気記録装置、光ディスク、光磁気記録媒体、半導体メモリなどがある。磁気記録装置には、ハードディスク装置(HDD)などがある。光ディスクには、DVD(Digital Versatile Disc)、DVD−RAM(Random Access Memory)、CD−ROM(Compact Disc Read Only Memory)、CD−R(Recordable)/RW(ReWritable)などがある。光磁気記録媒体には、MO(Magneto-Optical disk)などがある。
【0082】
入出力インタフェース1204には、入出力装置1204a(例えば、タッチパネルなど)が接続され、ユーザが入力した情報を受信し、バス1206を介してCPU1201に送信する。また、CPU1201からの命令に従ってディスプレイの画面上に操作情報などを表示する。
【0083】
通信インタフェース1205は、必要に応じ、他のコンピュータとの間のLAN接続やインターネット接続や無線接続のためのインタフェースである。また、他の装置に接続され、外部装置からのデータの入出力を制御する。
【0084】
このようなハードウェア構成を有するコンピュータとレーダを用いることによって、上記説明した各種処理機能(実施形態で説明した処理(フローチャートなど))が実現される。その場合システムが有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムをコンピュータで実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体1203aに記録しておくことができる。
【0085】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD、CD−ROMなどの可搬型記録媒体が販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0086】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0087】
また、本発明は、上記実施の形態に限定されるものでなく、本発明の要旨を逸脱しない範囲内で種々の改良、変更が可能である。なお、各実施形態は処理に矛盾の無い限りにおいて、互いに組み合わせても構わない。
【0088】
以上実施例を含む実施形態に関し、更に以下の付記を開示する。
(付記1)
目標物を検知するレーダ装置であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、
を備えることを特徴とするレーダ装置。
(付記2)
前記経路判別部は、
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記1に記載のレーダ装置。
(付記3)
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記2に記載のレーダ装置。
(付記4)
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記3に記載のレーダ装置。
(付記5)
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする付記1に記載のレーダ装置。
(付記6)
レーダ装置を用い目標物を検知する探知方法であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求めて目標物位置情報を生成し、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する、
ことを特徴とする探知方法。
(付記7)
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記6に記載の探知方法。
(付記8)
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記7に記載の探知方法。
(付記9)
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記8に記載の探知方法。
(付記10)
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする付記9に記載の探知方法。
(付記11)
前記レーダ装置が送信する信号は、インパルスであることを特徴とする付記1に記載のレーダ装置。
(付記12)
前記レーダ装置が送信する信号は、インパルスであることを特徴とする付記5に記載の探知方法。
【符号の説明】
【0089】
1 透過型レーダ装置
T−ANT、R−ANT1、R−ANT2 アンテナ
2 送信部
3a、3b 受信部
4a、4b AD変換部
5 処理部
6 記録部
7 制御部
8 表示部
9 操作部
10 固定物検出部
11 周辺構造取得部
12 目標物検出部
13 経路判別部
1200 ハードウェア
1201 CPU
1202 記録部
1203 記録媒体読取装置
1203a 記録媒体
1204 入出力インタフェース
1204a 入出力装置
1205 通信インタフェース
1206 バス
【技術分野】
【0001】
本発明は、目標物を検知するレーダ(Radio detection and ranging)装置および探知方法に関する。
【背景技術】
【0002】
レーダ装置は室内の目標物の識別、位置を確認する際などに利用されている。例えば、災害救助における瓦礫に埋もれた被災者の発見、テロ対策における建物内に潜伏しているテロリストを室外から知られること無く監視するといった用途への適用が期待されている。
【0003】
ところが、レーダ装置では、目標物(人など)から直接反射された反射波だけでなく、室内に配置された固定物(椅子、机)からの反射波や、人と固定物などの間で多重反射する複雑な経路を伝搬してくる反射波(マルチパス)も検知してしまう。目標物から直接反射された反射波以外に検出されるマルチパスの影響下で、目標物からの反射波だけを検出しようとしても、受信信号には様々な経路を経て到来するマルチパスが合成されている。そのため、受信信号から目標物からの直接反射された反射波だけを分離することは困難である。また、同一時刻にレーダ装置が受信する受信信号の波形は、複数の直接反射された反射波とマルチパスが位相合成されているため、受信信号のレベルが変動してフェージングが発生し、レーダ装置の目標物の検知能力を低下させる。
【0004】
なお、他の技術として、Digital Beam Forming(DBF)アレイアンテナを構成する複数のサブアレイ(N個)から送られる、モノパルス合成前のN×2個の位相中心の異なるサブアレイ信号を用いて、多次元の信号処理を実施して、マルチパス環境下で不要波を抑圧する提案がされている。
【0005】
また、マルチパスが問題となる無線通信の分野では、固定通信における対策としては送受信機の位置が既知であることから、受信した時間により最短の経路を伝搬した電波を検出することでマルチパスの影響を排除することが可能である。しかし、未知の目標物を検出するレーダ装置には適用することは困難である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−98999号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は上記のような実情に鑑みてなされたものであり、マルチパスの影響を低減させ、目標物の検知精度を向上させるレーダ装置および探知方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
実施態様のひとつである遮蔽物越しの目標物を検知するレーダ装置は、固定物検出部、目標物検出部、経路判別部を備えている。
目標物検出部は、送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する。
【0009】
経路判別部は、固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する。
【発明の効果】
【0010】
実施の態様によれば、マルチパスの影響を低減させ、目標物の検知精度を向上させるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】透過型レーダ装置の構成の一例を示す図である。
【図2】マイクロ波帯のパルス波形とインパルス波形の一例を示す図である。
【図3】処理部の動作の一例を示すフロー図である。
【図4】Aは部屋の間取り図(図面データ)の一例を示す図であり、Bは間取り図に対応する周辺構造情報の一例を示す図である。
【図5】アンテナで受信した反射波の概要を示す三次元グラフの一例を示す図である。
【図6】Aはサンプリング距離ごとに短時間フーリエ変換を行った演算結果の波形の一例を示す図であり、Bは振幅変動情報のデータ構造の一例を示す図である。
【図7】測角処理の計算を説明するための一例を示す図である。
【図8】A,Bは固定物位置情報の一例を示す図であり、C,Dは目標物位置情報の一例を示す図である。
【図9】室内で想定される電波の伝搬経路(パス)を示す図である。
【図10】経路判別部の動作の一例を示すフロー図である。
【図11】経路判別部の動作の一例を示すフロー図である。
【図12】本実施形態がコンピュータプログラムとして実現される場合の構成の一例を示す図である。
【発明を実施するための形態】
【0012】
以下図面に基づいて、本実施形態について詳細を説明する。
(実施形態1)
図1は、透過型レーダ装置の構成の一例を示す図である。実施形態1では、レーダ装置として、透過型レーダ装置を用いた場合について説明する。ただし、レーダ装置は、透過型レーダ装置に限定されるものではなく、マルチパスの影響を受けるレーダ装置であれば限定されるものではない。また、透過型レーダ装置の送受信波は、遮蔽物(壁など)、固定物(机、椅子など)を透過する電波と、反射する電波を含んでいる。
【0013】
実施形態1の透過型レーダ装置1は、アンテナT−ANT、R−ANT1、R−ANT2、送信部2、受信部3a、3b、AD変換部4a、4b、処理部5、記録部6、制御部7、表示部8、操作部9を備えている。アンテナT−ANTは、送信部2から予め決められた間隔で送信されるマイクロ波帯のインパルス波を、監視方向に送信する送信アンテナである。例えば、マイクロ波帯のインパルスは幅1ns以下(15cm相当)であることが好ましい。なお、パルス幅を短くすればするほど、時間分離能力が向上するため、直接波から遅延して到着するマルチパスを分離し易くなる。
【0014】
なお、実施形態1では、目標物として人などを対象としているため、インパルスを用いているが、例えば、対象にする目標物が車両などのインパルスを用いなくてもよい場合には、インパルスを必ずしも用いなくてもよい。
【0015】
アンテナR−ANT1は、アンテナT−ANTから送信されたインパルスが目標物、固定物などによりに反射した反射波を受信し、受信した反射波を受信信号として受信部3aに供給する。また、アンテナR−ANT2は、アンテナR−ANT1と離れて配置され、アンテナT−ANTから送信されたインパルスが目標物、固定物などによりに反射した反射波を受信し、受信した反射波を受信信号として受信部3bに供給する。
【0016】
なお、固定物は、例えば室内に配置されたテーブルや椅子などのように、必ずしも一定の場所に固定されていないが、人などのように移動をしないものである。
図2は、マイクロ波帯のパルス波形とインパルス波形を示す図である。図2では、縦軸にレベル、横軸に時間を示し、1〜数μsec幅のパルス波形と、1〜数psec幅のインパルス波形が示されている。透過型レーダ装置1は、ある時間幅をもつパルス波を送信して、目標物に反射したパルス波を受信するまでの時間により、目標物までの距離を計測する。屋外においてレーダ装置を使用する場合であれば、例えばパルス波のパルス幅をμsec単位にし、数十m〜数百mの距離を計測する設定にする。このパルス幅の設定は、パルス幅が分離できる複数目標物の最小間隔も決めている。従って、室内で使用する場合は、部屋の大きさが数m((1(m)×2/3)108(m/sec)=(6.7)10−9(sec)相当)で目標物となる人などの厚みは、数十cm(2〜3nsec相当)程度である。そこで、室内で目標物を検出するためには、パルス波のパルス幅を2〜3nsec以下に狭める必要があり、波長が短いレーザ(周波数が高い:1/(数nsec)=数百MHz)を使用したりして、レーダ機能を実現している。しかし、レーザなどを用いて遮蔽物越しに目標物を検知する場合、壁などの障害物があると回折、散乱が起こり、壁を透過させることは困難である。そこで、実施形態1の透過型レーダ装置1では、壁(コンクリート、木材など)を通過することが可能であるマイクロ波帯のインパルスを用いる。なお、上記コンクリート、木材以外の材質であっても、目標物までの距離と遮蔽物の材質による減衰とのトレードオフを考慮することにより、透過させることが可能である。例えば、遮蔽物が煉瓦などであってもよい。
【0017】
また、本例ではアンテナT−ANTは、アンテナ走査せずに、アンテナT−ANTの正面から前面に、ビーム幅相当の送信信号を満遍なく放射する。なお、アンテナT−ANTをアンテナ走査して送信信号(インパルス)を送信してもよい。
【0018】
送信部2は、予め決められた幅のインパルスを予め決められた周期でアンテナT−ANTに供給する指示(制御信号)を制御部7から受信する。そして、送信部2は、受信した制御信号に従ってしてアンテナT−ANTにインパルスを供給する。
【0019】
受信部3aは、アンテナR−ANT1が受信した反射波を制御部7の指示(制御信号)に従い受信して、AD変換部4aに送信する。ここで、受信部3aに送信される制御信号は、インパルス送信時にアンテナR−ANT1が供給した信号を排除する指示と、予め決められた期間に受信した反射波だけを受信する指示を含んでいる。受信部3bは、アンテナR−ANT2が受信した反射波を制御部7の指示(制御信号)に従い受信して、AD変換部4bに送信する。ここで、受信部3bに送信される制御信号は、受信部3aに送信される制御信号と同じであり、受信部3aと受信部3bは同期して動作する。
【0020】
AD変換部4a、4bは、アナログ/ディジタル変換器である。例えば、等価変換サンプリングなどを用いることが好ましい。
処理部5は、固定物検出部10、周辺構造取得部11、目標物検出部12、経路判別部13などを備えている。また、処理部5はCentral Processing Unit(CPU)やプログラマブルなデバイス(Field Programmable Gate Array(FPGA)、Programmable Logic Device(PLD)など)を用いて処理部5の機能を実行させてもよい。なお、処理部5の詳細については後述する。
【0021】
記録部6は、プログラム、テーブル、データなどが記録されている。また、記録部6は、例えばRead Only Memory(ROM)、Random Access Memory(RAM)、ハードディスクなどのメモリである。また、記録部6は、パラメータ値、変数値などのデータを記録してもよいし、ワークエリアとして用いることもできる。本例では、記録部6に、固定物データベース、周辺構造データベースなどが記録されている。なお、記録部6の詳細については後述する。
【0022】
制御部7は、透過型レーダ装置の各部を制御し、CPUやプログラマブルなデバイスを用いて、各部の制御を行う。
表示部8はディスプレイなどであり、処理部5、制御部7などからの命令に従ってディスプレイの画面上の操作などに用いる情報を表示する。操作に用いる情報は、例えば、利用者が透過型レーダ装置1の操作、計測時の設定、初期設定などをするときに用いる情報である。また、表示部8は、透過型レーダ装置の探知した結果である表示情報をディスプレイに表示するときに用いる。表示情報は、記録部6に記録されている固定物データベース、周辺構造データベースなどから取得したデータと、処理部5で求めた探知結果に基づいて、生成された画像情報などである。なお、表示方法は限定するものではないが、例えば、2次元表示、3次元表示などをすることが好ましい。
【0023】
操作部9はタッチパネル、キーボード、およびマウスなどであり、表示部8のディスプレイに表示された情報などに従って、透過型レーダ装置1の操作に用いる情報などを入力する。例えば、利用者が透過型レーダ装置1の操作、計測時の設定、初期設定などをするときに用いる。
【0024】
処理部5について説明する。
図3は、処理部5の動作の一例を示すフロー図である。ステップS1では、処理部5が記録部6を検索し、対象とする探知範囲の固定物データベースが作成されているか否かを判定する。既に、固定物データベースが作成されていればステップS8に移行し、作成されていなければステップS2に移行する。対象の探知範囲とは、遮蔽物(壁など)に囲まれた空間であり、例えば、監視対象の室内などのことである。
【0025】
ステップS2〜ステップS7では、固定物データベースの作成について説明する。
(周辺構造情報取得処理の説明)
ステップS2で周辺構造取得部11が、探知する対象の範囲(室内など)の間取り図に対応するデータ(周辺構造情報:図面データなど)を取得して、該データを記録部6の周辺構造データベースに登録する。図4のA、Bに周辺構造データベースに記録されている周辺構造情報のデータ構造の一例を示す。図4のAは、例えば部屋の間取り図(図面データ)であり、図4のBは、例えば図4のAの間取り図に対応する周辺構造情報を示している。図4のBの周辺構造情報は、「部屋データ」「部材データ」「平面座標データ」「平面寸法データ」などの情報を有している。「部屋データ」には部屋の識別するための「Room1」・・・・が記録され、「部材データ」には部材の識別するための「Wa1」「Wa2」「Wa3」「Wa4」「W1」「D1」「D2」「D3」・・・・が記録されている。なお、Waは壁を示し、Wは窓を示し、Dはドアを示している。また、壁、窓、ドア以外にも、天井、照明なども部材データとして記録してもよい。また、「平面座標データ」には部材の位置座標を示す「(x1,y1)(x3,y3)」「(x2,y2)(x4,y4)」「(x1,y1)(x4,y4)」・・・・などが記録されている。また、「平面寸法データ」には部材の寸法を示す「L2」「L2」「L1」「L1」「L1−(L9+L10)」・・・・などが記録されている。なお、周辺構造情報として、CAD(Computer aided design system)などにより作成したデータを用いてもよい。また、上記説明では2次元の場合の周辺構造情報について示したが、周辺構造情報に、さらに高さに関する情報などを付加して3次元の周辺構造情報を用いてもよい。
【0026】
(固定物検出処理の説明)
固定物検出部10は、上記周辺構造に示したような移動が簡単にできないものでなく、例えば、室内に配置されたテーブルや椅子などのように、必ずしも一定の場所に固定されていないが、人などのように移動をしないものである。
【0027】
図3のステップS3で固定物検出部10が、AD変換部4aまたはAD変換部4bから取得したディジタル信号に対して短時間フーリエ変換を行う。例えば、固定物検出部10は、AD変換後のディジタル信号を、固定物検出部10のFIFO(First In First Out)バッファなどに、予め設定した周期t1(処理周期)で一時保管する。予め設定した周期t1分のデータが蓄えられたら、記録部6へ予め設定した周期t1単位で格納する。次に、格納したデータを読み出し、予め設定した周期t1内で短時間フーリエ変換を行う。図5は、アンテナR−ANT1またはアンテナR−ANT2で受信した反射波の概要を示す三次元グラフである。図5の三次元グラフはX軸に距離、Y軸に時間、Z軸に振幅が示されている。図5の期間tsはインパルスを送信してから次のインパルスを送信するまでの、予め設定した期間を示し、サンプリング距離(S1〜Sn)は、予め決められた距離を示し、例えば、S1=0〜10cm、S2=11〜20cm・・・・としている。図5の例では、ディジタル信号に変換された受信信号を周期t1分、期間tsごとに取得し、この取得した周期t1分のディジタル信号に対して、サンプリング距離ごとに短時間フーリエ変換を行う。図6のAには、サンプリング距離ごとに短時間フーリエ変換を行った演算結果の波形が示されており、縦軸には振幅、横軸には速度(周波数)が示されている。固定物の場合には移動しないため、振幅が範囲A(速度が0に近い)に表れる。目標物が移動している場合には、振幅が範囲Bに表れる。
【0028】
次に、固定物検出部10は短時間フーリエ変換の演算結果の振幅値をサンプリング距離S1〜Snに関連付けて振幅変動情報を生成し、記録部6などに記録する。振幅変動情報のデータ構造は、例えば図6のBに示すように、「距離データ」「振幅データ」「速度データ」を有している。「距離データ」にはサンプリング距離を示す「S1」「S2」・・・「Sn」が記録され、「振幅データ」には振幅を示す値が記録され、本例では便宜上振幅値として「レベル1」「レベル2」・・・「レベルn」と示す。「速度データ」には速度を示す値が記録され、本例では便宜上速度値として「速度1」「速度2」・・・「速度n」と示す。
【0029】
図3のステップS4では、固定物検出部10がサンプリング距離ごとに振幅変動がない振幅変動情報検出する。図6のAの例であれば、固定物検出部10は、範囲Aの範囲の振幅変動情報を検出する。
【0030】
ステップS5では、固定物検出部10がステップS4で求めた振幅変動情報に基づいて距離を求める。すなわち、アンテナT−ANTから固定物(図7のTarget)を介してアンテナR−ANT1までの距離を求める。また、固定物検出部10は、アンテナT−ANTから固定物(図7のTarget)を介してアンテナR−ANT2までの距離を求める。
【0031】
図6のBの場合であれば、固定物検出部10が距離データS1〜Snに関連付けられた振幅データから、予め設定した閾値以上の振幅値を抽出する。そして、抽出した振幅値に関連付けられた距離データを検出する。
【0032】
ステップS6では、固定物検出部10がステップS5で求めた各距離データに基づいて測角処理をして固定物の方位角θ(方位)を求める。図7の例では、方位角θはアンテナT−ANTとアンテナR−ANT1を結ぶ直線と、アンテナT−ANTとTargetを結ぶ直線のなす角度である。また、図7に示すように、アンテナT−ANTから送信してアンテナR−ANT1で受信する経路長をL1とすると、L1は式1で示すことができる。
【数1】
【0033】
また、アンテナT−ANTから送信してアンテナR−ANT1で受信する経路長をL2とすると、L2は式2で示すことができる。
【数2】
【0034】
図7のarea_Aの三角形は三角関数の関係から、式3で示すことができる。r1はアンテナT−ANTからアンテナR−ANT1までの距離であり、r2はアンテナT−ANTからアンテナR−ANT2までの距離である。
【数3】
【0035】
図7のarea_Bの三角形は三角関数の関係から、式4で示すことができる。
【数4】
【0036】
次に、式1、式2をそれぞれ変形して式5、式6を求める。
【数5】
【数6】
【0037】
式5を式3に代入して変形して式7が求まる。
【数7】
【0038】
また、式6を式4に代入して変形すると式8が求まる。
【数8】
【0039】
次に、式7と式8より式9を求める。
【数9】
【数10】
となり、式9を式7または式8に代入すると、アンテナT−ANTから固定物までの距離R1と、アンテナT−ANTの位置から固定物までの方位角θが算出できる。そして、距離R1と方位角θに基づいて固定物の位置座標を算出する。なお、他の方位角算出方法としてモノパルス測角を用いてもよい。
【0040】
ステップS7では、記録部6の固定物データベースに固定物位置情報を記録する。固定物位置情報は、例えば、ステップ6で算出した距離R1、方位(方位角θ)に基づいて算出した位置座標を有している。また、距離と方位についてのデータを有していてもよい。
【0041】
図8のA、Bに固定物データベースを示す。固定物データベースは、固定物ごとに割り振られた識別子に、対応する固定物位置情報を関連付けて、記録部6などに記録されている。図8のAの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「k1」「k2」・・・「kn」が記録され、「距離」にアンテナT−ANTから固定物までの距離を示す「D1」「D2」・・・「Dn」が記録されている。また、「方位角」にアンテナT−ANTと固定物との方位(方位角)を示す「θ1」「θ2」・・・「θn」が記録されている。また、図8のBの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「k1」「k2」・・・「kn」が記録されている。また、「位置座標」にアンテナT−ANTの位置を基準点とした固定物の位置座標(方位)を示す「(x1,y1)」「(x2,y2)」・・・「(xn,yn)」が記録されている。なお、図8のA、Bのデータにさらに、固定物の「奥行き」「幅」「高さ」などのデータを付加してもよい。
【0042】
上記のように、記録部6に固定物位置情報と周辺構造情報を記録して、固定物で反射される複雑な多重反射マルチパスを推定するために用いる固定物データベース、周辺構造データベースを作成する。なお、固定物位置情報と周辺構造情報により室内の固定物の配置をマップ化して、固定物マップを生成してもよい。
【0043】
(目標物検出処理の説明)
ステップS8〜ステップS13では、移動する目標物の位置検出について説明する。ステップS8では、目標物検出部12がAD変換部4aまたはAD変換部4bから取得したディジタル信号に対して短時間フーリエ変換を行う。短時間フーリエ変換はステップS3で説明したように処理を行う。なお、本例では目標物検出部12においても短時間フーリエ変換をしているが、固定物検出部10でも同じように短時間フーリエ変換をしているので、短時間フーリエ変換処理を共用してもよい。
【0044】
ステップS9では、目標物検出部12がサンプリング距離ごとに振幅変動がある振幅変動情報を検出する。図6のAの例であれば、目標物検出部12は、範囲Bの範囲の振幅変動情報を検出する。
【0045】
ステップS10では、目標物検出部12がステップS9で求めた振幅変動情報に基づいて距離を求める。すなわち、アンテナT−ANTから移動する目標物(図7のTarget)を介してアンテナR−ANT1までの距離を求める。また、目標物検出部12は、アンテナT−ANTから移動する目標物(図7のTarget)を介してアンテナR−ANT2までの距離を求める。
【0046】
図6のBの場合であれば、目標物検出部12が距離データS1〜Snに関連付けられた振幅データから、予め設定した閾値以上の振幅値を抽出する。そして、抽出した振幅値に関連付けられた距離データを検出する。
【0047】
ステップS11では、目標物検出部12がステップS10で求めた各距離データに基づいて測角処理を行い移動する目標物の方位を求める。ここで、測角処理はステップS6で説明したようにアンテナT−ANTから固定物までの距離R1と、アンテナT−ANTの位置から移動する目標物までの方位角θが算出できる。そして、距離R1と方位角θに基づいて移動する目標物の位置座標を算出する。上記ステップS8〜S11(目標物検出処理)により、移動する目標物の位置を求めることができる。また、上記ステップS8〜S11(目標物検出処理)により、遮蔽物で囲まれた空間(室内など)において、移動する目標物からの反射波を移動速度に応じて生ずる周波数に基づいて判別して、移動する目標物を抽出することができる。
【0048】
図8のC、Dに目標物データベースを示す。目標物データベースは、移動する目標物ごとに割り振られた識別子に、対応する目標物の位置情報を関連付けて、記録部6などに記録している。図8のCの場合であれば、目標物ごとに割り振られた識別子「目標物ID」に「M1」「M2」・・・「Mn」が記録され、「距離」にアンテナT−ANTから目標物までの距離を示す「D1」「D2」・・・「Dn」が記録されている。また、「方位角」にアンテナT−ANTと固定物との方位(方位角)を示す「θ1」「θ2」・・・「θn」が記録されている。また、「速度」に移動する目標物の速度を示す「V1」「V2」・・・「Vn」が記録されている。また、図8のDの場合であれば、固定物ごとに割り振られた識別子「固定物ID」に「M1」「M2」・・・「Mn」が記録されている。また、「位置座標」にアンテナT−ANTの位置を基準点とした目標物の方位(位置座標)を示す「(x1,y1)」「(x2,y2)」・・・「(xn,yn)」が記録されている。なお、図8のC、Dのデータにさらに、目標物の「奥行き」「幅」「高さ」などのデータを付加してもよい。
【0049】
ステップS12では、経路判別部13が受信した反射波からマルチパスを検出して、マルチパスの影響を受けていない移動する目標物の反射波を抽出する処理を行うとともに、移動する目標物の位置を推定する。ステップS13では、経路判別部13が推定した目標物の位置に関する目標物位置情報を記録部6に記録する。なお、ステップS12、S13の詳細は後述する。
【0050】
(経路判別処理の説明)
図9、図10、図11を用いて経路判別処理について説明する。
図9は、室内で想定される電波の伝搬経路(パス)を示す図である。図9では、Target(移動する目標物:人など)から直接反射する経路(経路1)、固定物k2から直接反射する経路(経路2)、固定物k1からのマルチパス(経路3)、Targetと固定物k2間のマルチパス(経路4)が挙げられる。図10、図11は、経路判別部の動作の一例を示すフロー図である。
【0051】
ステップS1001では、経路判別部13が上記ステップS8〜S11(目標物検出処理)により検出した目標物位置情報から同一速度の目標物を抽出し、同一速度の目標物位置情報をグループ化する。上記ステップS8〜S11(目標物検出処理)で抽出した目標物位置情報にはマルチパスも含まれている。つまり、移動する目標物に反射したマルチパスは、移動する目標物と同じ速度を示すことから、目標物位置情報から同一速度の目標物を探索し、速度ごとに目標物位置情報をグループに分ける。なお、同じ速度の目標物がない移動する目標物は、マルチパスの影響を受けていないことになる。そのため、その移動する目標物に対応する目標物位置情報は、移動する目標物から直接反射した反射波に基づいて生成されたものであると判定できる。よって、経路判別部13は該目標物位置情報を記録部6に記録する。なお、図9において固定物だけが関係するマルチパス(経路2)(経路3)は、上記ステップS8〜S11(目標物検出処理)により、既に排除されている。
【0052】
ステップS1002では、経路判別部13がグループ化された速度が同じ複数の目標物位置情報の距離が同じかを判定する。同じである場合(Yes)にはステップS1101に移行し、異なる場合(No)にはステップS1003に移行する。
【0053】
ステップS1003で経路判別部13は、速度が同じグループ内の距離が異なると判定され、複数の目標物のなかで最短距離の目標物を基準目標物に設定する。複数の目標物のなかで最短距離になる目標物は、伝搬経路が一番短いため、移動する目標物から直接反射した反射波に基づいて生成された目標物位置情報に対応する目標物(真の目標物)と判定できる。その他の目標物は、それぞれが真の目標物である可能性と、マルチパスに基づいて生成された目標物位置情報に対応した目標物である可能性があるので、これらの目標物を仮目標物に設定する。なお、経路判別部13は、基準目標物に対応する目標物位置情報を記録部6に記録する。
【0054】
ステップS1004で経路判別部13は、仮目標物に対応する目標物位置情報をひとつ取得する。
なお、経路判別部13は、仮目標物に対応する目標物位置情報が真の目標物かマルチパスかの判定を、全仮目標物に対応する目標物位置情報に対して行なう。判別するマルチパスは最終反射が固定物によるものを対象とし、最後に移動物で反射したマルチパスは判別対象としない。
【0055】
ステップS1005において経路判別部13は、仮目標物が対象の探知範囲(室内など)に存在するかを判定する。対象の探知範囲に存在する場合(Yes)は、ステップS1006に移行し、対象の探知範囲に存在しない場合(No)は、ステップS1011に移行する。仮目標物が、上記図面などから作成した固定物マップ内に存在しない場合はマルチパスと考えられるので排除する。対象の探知範囲に存在するか否かの判定は、例えば、仮目標物に対応する目標物位置情報の方位角と固定物マップを用い、透過型レーダ装置1から対象の探知範囲内の仮目標物が存在する方位の距離を求める。そして、該求めた距離が仮目標物までの距離より小さいと判定されたとき、対象の探知範囲に存在すると判定する。
【0056】
ステップS1006では、経路判別部13が仮目標物の方位に固定物が存在するかを、固定物マップを参照して判定する。仮目標物の方位に固定物が存在する場合(Yes)、ステップS1007に移行し、存在しない場合(No)、ステップS1012に移行する。存在しないの場合、対象の探知範囲(室内など)の固定物が無い方位からの移動する目標物からの反射波はマルチパスではないと判定する(真の目標物からの反射と判定する)。なお、本実施態様のレーダ計測において、目標物と固定物が同一方向にあってもインパルス幅相当以上の距離があれば、固定物と目標物を分離できるため、固定物と目標物の判別は可能である。
【0057】
ステップS1007では、経路判別部13が固定物と仮目標物の方位が同じ場合、距離も同一かを判定する。同一の場合(Yes)、ステップS1012に移行する。固定物と同じ位置からの移動する目標物の反射は、移動する目標物から固定物への伝搬経路が取れない(伝搬時間が無い)ため、真の目標物からの反射と判定する。同一でない場合(No)、ステップS1008に移行する。
【0058】
ステップS1008において、経路判別部13は仮目標物が固定物より距離が遠いかを判定する。距離が遠い場合(Yes)、ステップS1009に移行する。距離が近い場合(No)、ステップS1012に移行する。固定物によるマルチパスは必ず固定物より遠距離に見えるので、固定物より近い移動する目標物は真の目標物であると判定する。
【0059】
ステップS1009では、経路判別部13が固定物マップを用いて、最初に基準目標物で反射し、さらに1つ以上の固定物で反射した反射波の経路を全て探索する。探索した全ての経路の経路長を固定物マップ、基準目標物に対応する目標物位置情報の方位と距離(または、位置座標)などを用いて既存の技術により算出する。
【0060】
ステップS1010において、経路判別部13は固定物と同一方向で、固定物より遠くにあると判定されている仮目標物の距離と、最初に真の目標物で反射し、さらに1つ以上の固定物で反射した経路長の何れかと経路長が等しいかを判定する。等しいときマルチパスと判定して(Yes)、ステップS1011に移行し、等しくないとき(No)ステップS1012に移行する。
【0061】
ステップS1011では、経路判別部13がマルチパスであると判定された対象の仮目標物の目標物位置情報を記録部6から削除する。または、対象の仮目標物の目標物位置情報にマルチパスであることを示すフラグなどを立てる。
【0062】
ステップS1012で経路判別部13は、対象の仮目標物の目標物位置情報が真の目標物であることを記録部6に記録する。例えば、目標物位置情報に真の目標物であることを示すフラグなどを立てる。
【0063】
ステップS1013では、経路判別部13がステップS1003で設定した仮目標物の目標物位置情報すべてに対して、ステップS1004〜S1012の処理を行ったかを判定する。設定した仮目標物すべてに対して判定が終了していればステップS1014に移行し、終了していなければステップS1004に移行する。
【0064】
ステップS1014では、経路判別部13がステップS1001で設定した同一速度目標物の目標物位置情報グループすべてに対して、ステップS1002〜S1013、後述する1101〜S1110の処理を行ったかを判定する。設定した同一速度目標物位置情報のグループすべてに対して判定が終了していればこのフローを終了し、終了していなければステップS1002に移行する。
【0065】
次に、ステップS1002において経路判別部13がグループ化された速度が同じ複数の目標物位置情報の距離が異なる場合(No)に、ステップS1002に移行した場合について説明する。
【0066】
ステップS1101で経路判別部13は、グループ化された速度が同じ複数の目標物位置情報に基づいて、同じ方向の目標物位置情報を振り分け、同じ方向の目標物位置情報が複数ある場合(Yes)、ステップS1103に移行する。同じ方向の目標物位置情報がない場合(No)、ステップS1102に移行する。
【0067】
ステップS1102では、経路判別部13がステップS1101で振り分けられた同じ方向の目標物位置情報がない目標物位置情報を、真の目標物として記録部6に記録する。例えば、報に真の目標物であることを示すフラグなどを立てる。
【0068】
ステップS1103では、経路判別部13がグループ内の目標物を仮目標物に設定する。同じ距離で方位の異なる移動する目標物は、それぞれの複数の目標物でのマルチパスの影響があるため、それぞれを仮目標物とする。仮目標物が真の目標物かマルチパスかの判定は、すべての仮目標物に目標物位置情に対して判定を行なう。なお、判別するマルチパスは最終反射が固定物によるものを対象とする(最後に移動物で反射したマルチパスは判別対象としない)。
【0069】
ステップS1104では、経路判別部13が仮目標物に対応する目標物位置情報をひとつ取得する。
ステップS1105で経路判別部13は、仮目標物が対象の探知範囲(室内など)に存在するかを判定する。対象の探知範囲に存在する場合(Yes)は、ステップS1106に移行し、対象の探知範囲に存在しない場合(No)は、ステップS1109に移行する。仮目標物が、固定物マップ内に存在しない場合はマルチパスと考えられるので排除する。
【0070】
ステップS1106では、経路判別部13が仮目標物の方位に固定物が存在するかを判定し、存在する場合(Yes)は、ステップS1107に移行し、存在しない場合(No)は、ステップS1110に移行する。対象の探知範囲の固定物が無い方位からの移動物反射は、マルチパスではなく真の目標物からの反射波と判定する。
【0071】
ステップS1107で経路判別部13は、固定物の距離と、仮目標物の方位に固定物が存在する仮目標物の距離が、同じであるかを判定する。同じ場合(Yes)は、ステップS1110に移行し、同じでない場合(No)は、ステップS1108に移行する。固定物と同じ位置からの移動する目標物の反射は、移動する目標物から固定物への伝搬経路が取れない(伝搬時間が無い)ため、真の目標物からの反射と判定する。
【0072】
ステップS1108では、経路判別部13が固定物の距離より仮目標物の距離が遠いかを判定し、遠いい場合(Yes)はステップS1109に移行し、近い場合(No)はステップS1110に移行にはする。固定物によるマルチパスは必ず固定物より遠距離に見えるので、固定物より近い移動する目標物の反射は真の目標物であると判定する。
【0073】
ステップS1109では、経路判別部13がマルチパスであると判定された対象の仮目標物の目標物位置情報を記録部6から削除する。または、対象の仮目標物の目標物位置情報にマルチパスであることを示すフラグなどを立てる。
【0074】
ステップS1110で経路判別部13は、対象の仮目標物の目標物位置情報が真の目標物であることを記録部6に記録する。例えば、目標物位置情報に真の目標物であることを示すフラグなどを立てる。
【0075】
ステップS1111では、経路判別部13がステップS1103で設定した仮目標物の目標物位置情報すべてに対して、ステップS1104〜S1110の処理を行ったかを判定する。設定した仮目標物の目標物位置情報すべてに対して判定が終了していれば図10のステップS1014に移行し、終了していなければステップS1104に移行する。
【0076】
上記説明した処理により、時間領域だけでは分離できなかったマルチパスと真の目標物からの反射波の判別することができる。すなわち、時間(距離)の1次元に周波数(速度)と空間の次元を組合せた多次元情報を用いることにより、目標物から直接反射した反射波とマルチパスを判別することができる。具体的には、上記説明した図10、図11に示したフロー図に示した処理により、図9に示した固定物に関係するマルチパス(経路2、3)の影響だけでなく、マルチパス(経路4)の影響も排除される。その結果、最終的に真の目標物から直接反射された反射波(経路1)を抽出することができる。また、マルチパス(経路2、3)の影響だけでなく、マルチパス(経路4)の影響も排除することで、マルチパスの影響を低減し、実際に移動している目標物の検出確率を向上させることができる。そのため、レーダ性能向上が望め、運用時の装置の信頼性、確実性が高まる。
【0077】
(本実施形態がコンピュータプログラムとして実現される場合の構成)
図12は、上記実施形態のレーダ装置の処理部5を実現できるコンピュータのハードウェア構成の一例を示す図である。
【0078】
コンピュータのハードウェア1200は、CPU1201、記録部1202(ROM、RAM、ハードディスクドライブなど)、記録媒体読取装置1203、入出力インタフェース1204(入出力I/F)、通信インタフェース1205(通信I/F)などを備えている。また、上記各構成部はバス1206によってそれぞれ接続されている。
【0079】
CPU1201は、記録部1202に格納されている上記説明した透過型レーダ装置1の図3、10、11などに示した各処理を実行する。また、CPU1201は上記説明した処理部5の機能を有する。
【0080】
記録部1202には、CPU1201が実行するプログラムやデータが記録されている。また、ワークエリアなどとして使用される。また、記録部1202は上記説明した記録部6の機能を有する。
【0081】
記録媒体読取装置1203は、CPU1201の制御にしたがって記録媒体1203aに対するデータのリード/ライトを制御する。そして、記録媒体1203aに記録媒体読取装置1203の制御で書き込まれたデータを記憶させたり、記録媒体1203aに記憶されたデータを読み取らせたりする。また、着脱可能な記録媒体1203aは、コンピュータで読み取り可能な記録媒体として、磁気記録装置、光ディスク、光磁気記録媒体、半導体メモリなどがある。磁気記録装置には、ハードディスク装置(HDD)などがある。光ディスクには、DVD(Digital Versatile Disc)、DVD−RAM(Random Access Memory)、CD−ROM(Compact Disc Read Only Memory)、CD−R(Recordable)/RW(ReWritable)などがある。光磁気記録媒体には、MO(Magneto-Optical disk)などがある。
【0082】
入出力インタフェース1204には、入出力装置1204a(例えば、タッチパネルなど)が接続され、ユーザが入力した情報を受信し、バス1206を介してCPU1201に送信する。また、CPU1201からの命令に従ってディスプレイの画面上に操作情報などを表示する。
【0083】
通信インタフェース1205は、必要に応じ、他のコンピュータとの間のLAN接続やインターネット接続や無線接続のためのインタフェースである。また、他の装置に接続され、外部装置からのデータの入出力を制御する。
【0084】
このようなハードウェア構成を有するコンピュータとレーダを用いることによって、上記説明した各種処理機能(実施形態で説明した処理(フローチャートなど))が実現される。その場合システムが有すべき機能の処理内容を記述したプログラムが提供される。そのプログラムをコンピュータで実行することにより、上記処理機能がコンピュータ上で実現される。処理内容を記述したプログラムは、コンピュータで読み取り可能な記録媒体1203aに記録しておくことができる。
【0085】
プログラムを流通させる場合には、例えば、そのプログラムが記録されたDVD、CD−ROMなどの可搬型記録媒体が販売される。また、プログラムをサーバコンピュータの記憶装置に格納しておき、ネットワークを介して、サーバコンピュータから他のコンピュータにそのプログラムを転送することもできる。
【0086】
プログラムを実行するコンピュータは、例えば、可搬型記録媒体に記録されたプログラムもしくはサーバコンピュータから転送されたプログラムを、自己の記憶装置に格納する。そして、コンピュータは、自己の記憶装置からプログラムを読み取り、プログラムに従った処理を実行する。なお、コンピュータは、可搬型記録媒体から直接プログラムを読み取り、そのプログラムに従った処理を実行することもできる。また、コンピュータは、サーバコンピュータからプログラムが転送されるごとに、逐次、受け取ったプログラムに従った処理を実行することもできる。
【0087】
また、本発明は、上記実施の形態に限定されるものでなく、本発明の要旨を逸脱しない範囲内で種々の改良、変更が可能である。なお、各実施形態は処理に矛盾の無い限りにおいて、互いに組み合わせても構わない。
【0088】
以上実施例を含む実施形態に関し、更に以下の付記を開示する。
(付記1)
目標物を検知するレーダ装置であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、
を備えることを特徴とするレーダ装置。
(付記2)
前記経路判別部は、
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記1に記載のレーダ装置。
(付記3)
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記2に記載のレーダ装置。
(付記4)
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記3に記載のレーダ装置。
(付記5)
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする付記1に記載のレーダ装置。
(付記6)
レーダ装置を用い目標物を検知する探知方法であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求めて目標物位置情報を生成し、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する、
ことを特徴とする探知方法。
(付記7)
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記6に記載の探知方法。
(付記8)
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記7に記載の探知方法。
(付記9)
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする付記8に記載の探知方法。
(付記10)
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする付記9に記載の探知方法。
(付記11)
前記レーダ装置が送信する信号は、インパルスであることを特徴とする付記1に記載のレーダ装置。
(付記12)
前記レーダ装置が送信する信号は、インパルスであることを特徴とする付記5に記載の探知方法。
【符号の説明】
【0089】
1 透過型レーダ装置
T−ANT、R−ANT1、R−ANT2 アンテナ
2 送信部
3a、3b 受信部
4a、4b AD変換部
5 処理部
6 記録部
7 制御部
8 表示部
9 操作部
10 固定物検出部
11 周辺構造取得部
12 目標物検出部
13 経路判別部
1200 ハードウェア
1201 CPU
1202 記録部
1203 記録媒体読取装置
1203a 記録媒体
1204 入出力インタフェース
1204a 入出力装置
1205 通信インタフェース
1206 バス
【特許請求の範囲】
【請求項1】
目標物を検知するレーダ装置であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記経路判別部は、
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項2に記載のレーダ装置。
【請求項4】
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項3に記載のレーダ装置。
【請求項5】
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする請求項1〜4のいずれか1項に記載のレーダ装置。
【請求項6】
レーダ装置を用い目標物を検知する探知方法であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求めて目標物位置情報を生成し、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する、
ことを特徴とする探知方法。
【請求項7】
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項6に記載の探知方法。
【請求項8】
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項7に記載の探知方法。
【請求項9】
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項8に記載の探知方法。
【請求項10】
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする請求項5〜9のいずれか1項に記載の探知方法。
【請求項1】
目標物を検知するレーダ装置であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求め、目標物の速度と位置を表す目標物位置情報を目標物毎に生成する目標物検出部と、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する経路判別部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記経路判別部は、
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項2に記載のレーダ装置。
【請求項4】
前記経路判別部は、
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項3に記載のレーダ装置。
【請求項5】
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする請求項1〜4のいずれか1項に記載のレーダ装置。
【請求項6】
レーダ装置を用い目標物を検知する探知方法であって、
送信された信号に対する目標物からの反射波に基づいて、移動する目標物の速度、距離、および方位を求めて目標物位置情報を生成し、
固定物の位置を示す固定物位置情報と、前記目標物位置情報とを用いて、前記生成された目標物位置情報がマルチパスによるものか、移動する目標物から直接反射した反射波の経路に対応するものかを判別する、
ことを特徴とする探知方法。
【請求項7】
前記目標物位置情報を基に、速度が同じ目標物を抽出して、同じ速度ごとに目標物位置情報をグループ化し、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内に同じ方位がない目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項6に記載の探知方法。
【請求項8】
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で同じ距離となる目標物であって、前記グループ内の同じ方位の目標物を検出し、検出したそれぞれの目標物に対応する目標物位置情報を抽出し、
前記固定物位置情報と探知する対象の範囲内の構造を示す情報を用いて生成した固定物マップ、及び抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項7に記載の探知方法。
【請求項9】
前記グループに含まれる目標物位置情報を基に、前記グループに含まれる目標物の中で距離が異なる目標物であって、前記グループに含まれる目標物の距離が最短となる目標物位置情報を検出して基準目標物位置情報とし、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記基準目標物位置情報以外の目標物位置情報を抽出し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内の同じ方位の目標物の方位と固定物の方位が同じであり、且つ距離が同じとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記抽出した目標物位置情報に基づいて、対象の範囲内からの反射であって、前記グループ内に同じ方位の目標物の方位と固定物の方位が同じであり、且つ前記グループ内の同じ方位の目標物の距離が固定物の距離より近いとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定し、
前記固定物マップと前記基準目標物位置情報に基づいて、移動する目標物に最初に反射したのちに、ひとつ以上の固定物に反射した経路の経路長を全て求め、求めた経路長のいずれかと前記基準目標物位置情報以外の目標物位置情報の距離が異なるとき、前記移動する目標物から直接反射した反射波の経路に対応付けられている目標物位置情報と判定する、
ことを特徴とする請求項8に記載の探知方法。
【請求項10】
送信された信号に対する固定物からの反射波に基づいて、探知する対象の範囲に設置されている固定物の速度、距離、および方位を求めて、前記固定物の速度に基づいて前記固定物が移動していないと判定したとき、前記固定物と前記レーダ装置までの距離と方位を、固定物位置情報として記録する、
ことを特徴とする請求項5〜9のいずれか1項に記載の探知方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−112618(P2011−112618A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−271936(P2009−271936)
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月30日(2009.11.30)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]