
レーダ装置及びコンピュータプログラム
【課題】レーダで検知した対象物が低背検知対象物であるか否か判別することができる電子走査型レーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ3と、前記送信された電波が対象物により反射された電波を受信する受信アンテナ11から1nと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部24と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部22と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部28と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部29と、を備える。
【解決手段】電波を送信する送信アンテナ3と、前記送信された電波が対象物により反射された電波を受信する受信アンテナ11から1nと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部24と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部22と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部28と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部29と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置およびコンピュータプログラムに関する。
【背景技術】
【0002】
従来、ミリ波レーダ(以後、レーダ)は、通常、自動車の車体前方に搭載され、車間警報、車速制御などに用いられている。車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが用いられている。
【0003】
レーダを搭載した自車の周囲に障害物が存在する場合、車載レーダは自車と障害物との相対的な距離、方位、速度などの情報を有した物標データを車間警報、車速制御システムに出力する。車間警報、車速制御システムは、その物標の位置情報に応じて、自車と障害物との距離を維持させたり、衝突が予想される場合には警報を発したり、自車を減速させたりするといった自車の制御(以下、衝突軽減制御と称する)を行う(例えば、特許文献1参照)。そのため、車載レーダは、自車両に衝突する危険性がある対象物を迅速にかつ正確に検知する性能が要求されている。
【0004】
一方、自車両の周囲に障害物が存在しない場合、レーダは何も検知しないため、レーダは物標データを車速制御システムに出力しない。その場合、車速制御システム及び操舵制御システムは自車両をあらかじめ設定された車速と操舵にて走行させるよう制御を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−275840号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、自車の周囲に障害物が存在するが、それが車両床高に比べて十分に低い検知対象物(以下、低背検知対象物と称する)である場合には、低背検知対象物は、自車の進行を妨げるものではない為、車間警報を発せず、車速制御システム及び操舵制御システムは自車をあらかじめ設定された車速と操舵にて走行させるよう制御を行うべきである。
【0007】
しかしながら、高さ方向の分解能がない車載レーダは、アンテナ特性と低背検知対象物の反射強度によっては、低背検知対象物を走行の妨げとなる障害物と誤認してしまうという問題があった。そうすると、衝突事故が物理的に発生しない安全な走行状況にも関わらず、車両制御機器は上記レーダの誤認により衝突の危険性がある状況であると判断してしまう。この誤判断が原因で、不要な警報の発信または不要な自車の減速といった制御が行われ、運転者への不快をもたらしてしまう。また、自車の不要な減速は、後続車両との追突リスクを高める原因となる。
【0008】
そこで本発明は、上記問題に鑑みてなされたものであり、レーダで検知した対象物が低背検知対象物であるか否か判別することができるレーダ装置及びコンピュータプログラムを提供することを課題とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、を備えることを特徴とする。
上記レーダ装置によれば、受信電力をレーダと対象物との距離の関数として表すことにより、レーダが検知した対象物が低背検知対象物か否か判別することができる。
【0010】
上記レーダ装置の前記検知処理部は、前記距離が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出するものであってもよい。
これによれば、レーダが検知した対象物が低背検知対象物か否か判別するのを効率化し、かつその精度を向上させることができる。
【0011】
上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、時間の関数として、前記受信された電波の電力を算出する受信電力算出部と、所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、を備えることを特徴とするレーダ装置。
上記レーダ装置によれば、受信電力を時間の関数として表すことにより、レーダが検知した対象物が低背検知対象物か否か判別することができる。
【0012】
上記レーダ装置の前記検知処理部は、前記時間が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出するものであってもよい。
これによれば、レーダが検知した対象物が低背検知対象物か否か判別するのを効率化し、かつその精度を向上させることができる。
【0013】
上記レーダ装置の前記面積算出部は、前記曲線と所定の直線とを境界として定まる領域の面積または前記曲線と所定の曲線とを境界として定まる領域の面積を算出するものであってもよい。
これによれば、所定の区間において、前記曲線と所定の直線とを境界として定まる領域(閉じた空間)の面積を算出することにより、低背検知対象物の場合において算出される面積と通常検知対象物において算出される面積との差を検出することができるので、対象物が低背検知対象物であるか判定することができる。
【0014】
上記レーダ装置の前記面積算出部は、前記曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出するものであってもよい。
これによれば、低背検知対象物の場合において算出される面積と通常検知対象物において算出される面積との差を大きくすることができるので、対象物が低背検知対象物であるか精度良く判定することができる。
【0015】
上記レーダ装置の前記検知処理部は、前記面積の複数区間の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、区間面積の和を判定の基準とすることにより、通常検知対象物と低背検知対象物の差をより大きく表現することができるので、閾値の設定に余裕を持たせることができ、精度の高い判別ができる。
【0016】
上記レーダ装置の前記検知処理部は、複数区間の前記面積のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、全ての区間面積を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0017】
上記電子走査型レーダ装置の前記検知処理部は、前記面積が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、全ての区間面積を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0018】
上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、受信アンテナにより受信された電波に基づいて前記対象物までの距離を検出する第1のステップと、前記検出した距離の関数として、前記受信された電波の電力を算出する第2のステップと、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第3のステップと、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第4のステップと、をコンピュータに実行させる。
このコンピュータプログラムによれば、受信電力を距離の関数として表すことにより、レーダで検知した対象物が低背検知対象物か否か判別することができる。
【0019】
上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、時間の関数として、前記受信された電波の電力を算出する第1のステップと、所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第2のステップと、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第3のステップと、をコンピュータに実行させるためのコンピュータプログラム。
このコンピュータプログラムによれば、受信電力を時間の関数として表すことにより、レーダで検知した対象物が低背検知対象物か否か判別することができる。
【発明の効果】
【0020】
本発明によれば、レーダで検知した対象物が低背検知対象物であるか否か判別することができる。
【図面の簡単な説明】
【0021】
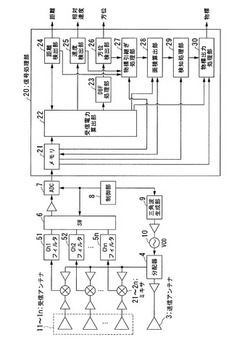
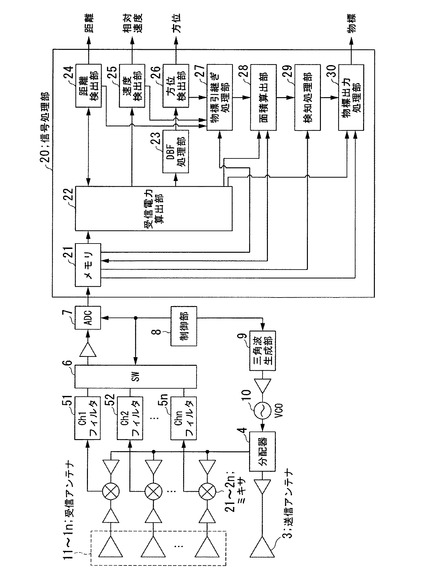
【図1】本発明の実施形態である電子走査型レーダ装置の構成例を示すブロック図である。
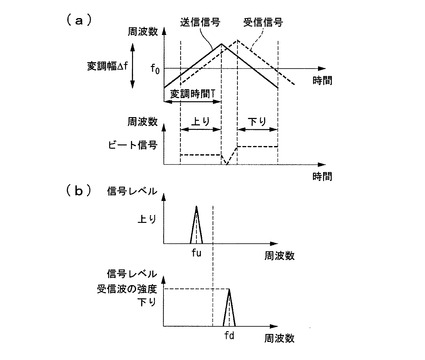
【図2】送信波及び受信波により、三角波の上昇領域及び下降領域におけるビート信号の生成を説明する概念図である。
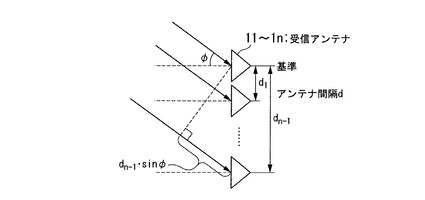
【図3】複数本のアンテナの配列している面に対して垂直方向の軸に対する反射波の到来角度を算出する方法を示した図である。
【図4】車両の前方に空き缶が存在する走行条件モデルを説明する図である。
【図5】レーダの受信電力値と仰角度との関係を示した図である。
【図6】通常検知対象物の受信電力値の距離特性と、低背検知対象物の受信電力値の距離特性を示した図である。
【図7】直接波と間接波の経路差の距離特性と位相差の正弦値の距離特性を示した図である。
【図8】任意の区間と、低背検知対象物を検知したときの受信電力値の基準化値を説明するための図である。
【図9】基準化電力の距離特性を示した図である。
【図10】閉区間の抽出と当該閉区間の面積の算出を説明するための図である。
【図11】閉区間の面積の算出例を示した図である。
【図12】通常検知対象物の受信電力曲線および区間平均値と、低背検知対象物の受信電力曲線および区間平均値とを比較するための図である。
【図13】通常検知対象物の基準化電力の面積と低背検知対象物の基準化電力の面積とを比較するための図である。
【図14】基準化電力の絶対値の積分範囲を指定する方法を説明するための図である。
【図15】区間毎の積分値の距離特性を示した図である。
【図16】物標抽出処理全体のフローチャートである。
【図17】低背検知対象物の判別処理のフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態による電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。図1は同実施形態の構成例を示すブロック図である。
【0023】
この図において、本実施形態による電子走査型レーダ装置は、受信アンテナ11〜1nと、ミキサ21〜2nと、送信アンテナ3と、分配器4と、フィルタ51〜5nと、SW(スイッチ)6と、ADC(A/Dコンバータ)7と、制御部8と、三角波生成部9と、VCO(Voltage Controlled Oscillator)10と、信号処理部20とを用いて構成されている。
【0024】
上記信号処理部20は、メモリ21と、受信電力算出部22と、DBF検知部23と、距離検出部24と、速度検出部25と、方位確定部26と、物標引継ぎ処理部27と、面積算出部28と、検知処理部29と、物標出力処理部30とを用いて構成されている。
【0025】
次に、図1を参照して、本実施形態による電子走査型レーダ装置の動作を説明する。
受信アンテナ11〜1nは、送信波が対象物にて反射し、この対象物から到来する反射波、すなわち受信波を受信する。
ミキサ21〜2n各々は、送信アンテナ3から送信される送信波と、各受信アンテナ11〜1nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
【0026】
上記送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO10において周波数変調した送信信号を対象物に対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、上記ミキサ21〜2nおよび送信アンテナ3に分配する。
【0027】
フィルタ51〜5n各々は、それぞれミキサ21〜2nにおいて生成された各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を出力する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ51〜5n各々を通過した各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(A/Dコンバータ)7に出力する。
【0028】
ADC7は、上記SW6から上記サンプリング信号に同期して入力される各受信アンテナ11〜1n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期してA/D変換してデジタル信号に変換し、信号処理部20におけるメモリ21の波形記憶領域に順次記憶させる。
【0029】
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図7に示す電子走査型レーダ装置全体の制御を行う。
信号処理部20内のメモリ21は、A/Dコンバータ7においてデジタル変換されたデジタル信号を各受信アンテナ11〜1nに対応したチャンネルごとに格納する。
【0030】
<距離、相対速度、水平角度(方位)を検出する原理>
次に、図2を用いて、本実施形態における信号処理部20において用いられる、電子走査型レーダ装置と対象物との距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
【0031】
図2は、図1の三角波生成部9において生成された信号をVCO10において、中心周波数f0、変調幅Δfで周波数変調した送信信号と、その送信信号が対象物に反射されて受信信号として入力される状態を示す。図2の例は対象物が1つの場合を示している。
【0032】
図2(a)に示すように、送信する信号に対し、対象物からの反射波である受信信号が、レーダと対象物との距離に応じて右方向(時間遅れ方向)に遅延されて受信される。さらに、ドップラー効果によって対象物との相対速度に応じて、送信信号に対して上下方向(周波数方向)に変動する。
【0033】
受信電力算出部22は、メモリ21に格納された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号(図2(a)の下図)に対して、フーリエ変換を行う。ここで、フーリエ変換後の複素数データの振幅を信号レベルと呼ぶこととする。
【0034】
受信電力算出部22は、何れかのアンテナにおける複素数データまたは、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値に対応するビート周波数、すなわち距離に依存した対象物の存在として検出することができる。ここで、全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0035】
フーリエ変換の結果、図2(b)に示されるように、対象物が1つの場合、上昇領域及び下降領域にそれぞれに1つのピーク値を有することなる。ここで、図8(b)は横軸が周波数、縦軸が信号強度となっている。
【0036】
そして、受信電力算出部22は、図2(b)に示すビート周波数毎の信号レベルから、予め設定された数値(閾値)を超える信号レベルを検出することによって、対象物が存在していることを判定する。ここで、信号レベルのピーク値を受信波の強度と称す。
【0037】
受信電力算出部22は、信号レベルのピークを検出した場合、ピーク値のビート周波数(ビート信号の上り部分及び下り部分の双方)を対象物周波数として距離検出部24、速度検出部25へ出力する。受信電力算出部22は、周波数変調幅Δfを距離検出部24へ出力し、中心周波数f0を速度検出部25へ出力する。
【0038】
また、受信電力算出部22は、信号レベルの下り部分のピーク値の二乗を受信電力として算出する。後述する距離検出部24から入力された対象物との距離の関数として、前記受信電力を面積算出部28へ出力する。
【0039】
受信電力算出部22は、信号レベルのピークを検出できなかった場合、物標候補がないという情報を物標出力処理部30に出力する。
なお、ビート信号の上り部分のピーク値、またはビート信号の上り部分のピーク値とビート信号の下り部分のピーク値の平均を信号レベルとして使用してもよい。
【0040】
複数の対象物が存在する場合、フーリエ変換後には、ビート信号の上り部分とビート信号の下り部分のそれぞれに対象物の数と同じ数のピークが表れる。レーダと対象物の距離に比例して、受信信号が遅延し、図2(a)の上段における受信信号は右方向にシフトするので、レーダと対象物との距離が離れるほど、図2(a)の下段におけるビート信号の周波数は大きくなる。
【0041】
複数の対象物に対応する信号レベルのピークが複数検出された場合には、上りの部分および下りの部分のピーク値ごとに、周波数が小さいものから順番に番号をつけて、検知処理部29へ出力する。ここで、上りおよび下りの部分において、同じ番号のピークは、同じ対象物に対応しており、それぞれの識別番号を対象物の番号とする。
【0042】
次に、距離検出部24は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により距離rを算出し、受信電力算出部22と物標引継ぎ処理部27へ出力する。
r={C・T/(2・Δf)}・{(fu+fd)/2}
【0043】
また、速度検出部25は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により相対速度vを算出し、物標引継ぎ処理部27へ出力する。
v={C/(2・f0)}・{(fu−fd)/2}
【0044】
上記距離r及び相対速度vを算出する式において、Cは光速度、Tは変調時間(上昇部分/下降部分)、fuは上昇部分における対象物周波数、fdは下降部分における対象物周波数である。
【0045】
次に、本実施形態における受信アンテナ11〜1nは、図1に示すように、間隔dにより配置されたアレー状のアンテナである。上記受信アンテナ11〜1nには、アンテナの配列している面に対する垂直方向の軸との角度φ方向から入射される、対象物からの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対する対象物からの反射波)が入力する。
【0046】
このとき、上記到来波は、上記受信アンテナ11〜1nにおいて同一角度φにて受信される。端ともう1端の受信アンテナ間にて発生する受信信号の位相差は、受信信号の周波数f、端ともう1端の受信アンテナ間の間隔dn−1および角度φから、位相差は、2πf・(dn−1・sinφ/C)で算出される。
【0047】
上記位相差を利用して、DBF(デジタルビームフォーミング)処理部23は、入力される各アンテナに対応した時間軸でフーリエ変換された複素データを、アンテナの配列方向にさらにフーリエ変換し、すなわち空間軸フーリエ変換を行う。そして、DBF処理部23は、角度分解能に対応した角度チャネル毎のスペクトルの強度を示す空間複素数データを算出し、ビート周波数毎に方位検出部26に出力する。
【0048】
方位検出部26は、算出されたビート周波数毎の空間複素数データの値の大きさのうち、一番大きな値を取る角度φを対象物が存在する方位として物標引継ぎ処理部27に出力する。
【0049】
物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、メモリ
21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそ
れぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル
前に検知した対象物と今回検知した対象物を同じものと判定する。
【0050】
その場合、物標引継ぎ処理部27は、メモリ21から読み出したその対象物の物標引継ぎ処理回数を1増やす。そうでない場合には、物標引継ぎ処理部27は、新しい対象物を検知したとみなす。また、物標引継ぎ処理部27は今回の対象物の距離、相対速度、方位およびその対象物の物標引継ぎ処理回数をメモリ21に保存する。また、物標引継ぎ処理部27は、検知処理部29へ対象物の識別番号を出力する。
【0051】
面積算出部28は、受信電力算出部22から前記検出した距離の関数としての前記受信された電波の電力を受け取る。
面積算出部28は、所定の距離区間において、前記関数を表す曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出する。
面積算出部28は、前記面積をこれまで算出した面積の和に加算し、当該加算後の面積の和をメモリ21に保存する。
【0052】
検知処理部29は、メモリ21から前記加算後の面積の和を読み出し、後述する低背検知対象物の判別アルゴリズムを用いて、対象物が衝突の危険性が伴う通常検知対象物であるか走行に支障をきたさない低背検知対象物であるかを判別し、当該判別結果を物標出力処理部30に出力する。これによって、対象物が衝突の危険性を伴う通常検知対象物である場合に、衝突を回避するために減速するか、または運転手に注意を促すために警報を発することができる。
【0053】
物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として出力する。物標出力処理部30は、検知処理部29から、複数の対象物の判別結果を受け取り、そのどちらもが通常検知対象物である場合、自車の車線上にある対象物の識別番号を物標として出力する。
【0054】
また、物標出力処理部30は、複数の対象物の判別結果を受け取り、そのどちらもが通常検知対象物である場合であって、2つ以上の対象物が自車の車線上にある場合、メモリ21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として出力する。なお、物標出力処理部30は、対象物が低背検知対象物である場合、または受信電力算出部22から物標候補がないという情報が入力された場合には、物標なしという情報を出力する。
【0055】
<低背検知対象物のレーダによる検知のシミュレーション結果>
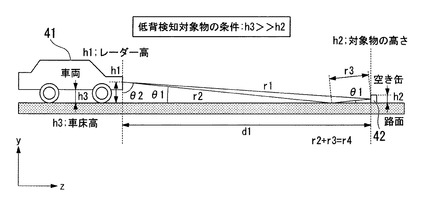
低背検知対象物のレーダによる検知のシミュレーション結果を説明する前に、まず、その条件について説明する。図4は、車両41のまっすぐ前方に空き缶42があることを想定したyz平面上の走行条件のモデルである。d1は車両41と低背検知対象物の1例である空き缶42の直接距離、r1は対象物への電磁波の直接波伝搬経路、r2とr3は、対象物への電磁波の間接波伝搬経路である。h1は車載レーダの高さ、h2は空き缶の高さ、h3は車両床高である。
【0056】
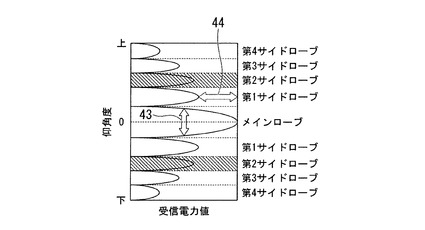
図5に示すように、アンテナ条件については、半値幅43を4[deg]、メインローブの受信電力とサイドローブの受信電力の比(以下、サイドローブ比と称する)44を45[dB]とすることとする。
【0057】
続いて、車両が衝突する危険性が有る通常検知対象物が車両前方に存在する場合におけるシミュレーションの条件について説明する。シミュレーションの条件は、以下の通りである。図4の車載レーダはミリ波帯域電波を用いることとし、レーダの設置高h1は0.55[m]とする。レーダの伝搬波の直進性が強いので、対象物体の反射面の高さh2をレーダの設置高h1と同じ高さである0.55[m]とする。RCS(Rader Cross Section、レーダ反射断面積)は0[dB]とする。
【0058】
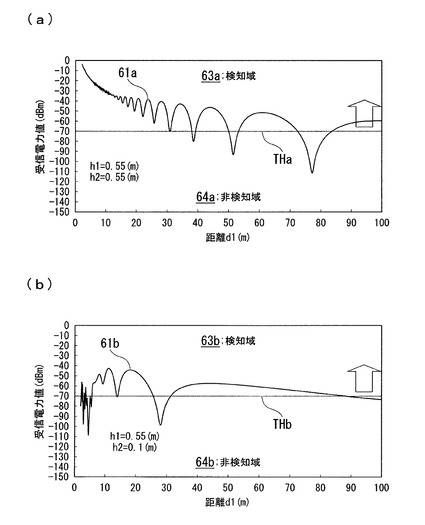
図6(a)は、車両が衝突する危険性が有る通常検知対象物が車両前方に存在する場合におけるレーダ受信電力の距離特性を示したシミュレーション結果である。横軸は図4で示した自車両と検知対象物との直線距離d1、縦軸は、受信電力であり、受信電力が1[mW]時に0[dBm]となるように計算されている。
【0059】
また、−70[dBm]が検知閾値THaであり、検知閾値THa以上の領域(検知域63a)では、レーダは受信波を検知することができるが、検知閾値THaよりも小さい領域(非検知域64a)では、レーダは受信波を検知することができない。通常検知対象物の場合、受信電力曲線61aは、直接距離d1に応じて、激しく変動している。
【0060】
続いて、車両が衝突する危険性が無い低背検知対象物が車両前方に存在する場合におけるシミュレーションの条件について説明する。シミュレーションの条件は、以下の通りである。図4の車載レーダはミリ波帯域電波を用いることとし、レーダの設置高h1は0.55[m]とする。対象物体の路面からの高さh2を0.1[m]とする。空き缶等を想定し、RCSを図6(a)の場合よりも十分に小さい値(−10[dB])とする。
【0061】
図6(b)は、車両が衝突する危険性が無い低背検知対象物が車両前方に存在する場合におけるレーダ受信電力の距離特性を示したシミュレーション結果である。横軸は図4で示した自車両と検知対象物との直線距離d1、縦軸は、受信電力であり、受信電力が1[mW]時に0[dBm]となるように計算されている。
【0062】
また、−70[dBm]が検知閾値THbであり、検知閾値THb以上の領域(検知域63b)では、レーダは受信波を検知することができるが、検知閾値THbよりも小さい領域(非検知域64b)では、レーダは受信波を検知することができない。低背検知対象物の場合、受信電力曲線61bは、通常検知対象物の場合の受信電力曲線61aと比べて、直接距離d1に応じて変化する量が少ない。
【0063】
図6(a)と図6(b)の結果から、検知閾値を越える全ての対象物を衝突危険対象物とするならば、直接距離d1が90[m]以下では、レーダは双方とも対象物を衝突危険対象物として判別してしまい、不要な衝突軽減制御を行ってしまうという問題がある。そこで、検知処理部29は、不要な衝突軽減制御を行わないために、以下に説明するアルゴリズムを用いて走行に支障をきたさない低背検知対象物に対し、衝突の危険性が伴う通常検知対象物を判別する。
【0064】
<低背検知対象物の判別アルゴリズムの原理>
次に、面積算出部28と検知処理部29における、低背検知対象物の判別アルゴリズムの原理について説明する。
図4に示すように、レーダから掃射された電磁波は直接波伝搬経路r1と間接波伝搬経路(r2とr3を合わせた経路、以下、総称してr4と略す)の2つのルートを介して反射点である検知対象物へ到達して合成される。さらに、この合成波は、反射点で再掃射されて、同じくr1の経路とr4の経路を伝搬し、到達点である車載レーダで再度合成される。
【0065】
この経路の異なる2つの伝搬波の合成が原因となり、レーダと検知対象物との直接距離d1に応じて変化する受信電力に「強めあう箇所」と「打ち消しあう箇所」が発生する。このような現象において、図4に示すレーダの高さh1と検知対象物の高さh2は、当該強めあう箇所と打ち消しあう箇所の発生数(以下、発生数と称す)を決定付ける主要因となっている。
【0066】
具体的には、直接波伝播経路r1に対する間接波伝播経路r4との差によって、到達点で観測される直接波と間接波間に位相差が生じる。そのような位相差をもった2つの波の合成によって、受信電力特性に「強め合う箇所」や「打ち消しあう箇所」が発生する。
距離d1が変化したときの直接波と間接波の経路差の変化量は、低背検知対象物より通常検知対象物の方が大きい。
【0067】
ここで、距離d1に応じて経路差Δr(但し、Δr=r4−r1とする)が変化するほど、位相差も同じく変化することから、距離d1が変化したときの直接波と間接波の位相差の変化量は、低背検知対象物より通常検知対象物の方が多い。
また、ある所定の距離の区間において前記発生数が多ければ多いほど、隣接する強めあう箇所と打ち消しあう箇所との間の距離(以下、帯域幅と称す)が小さくなる。
【0068】
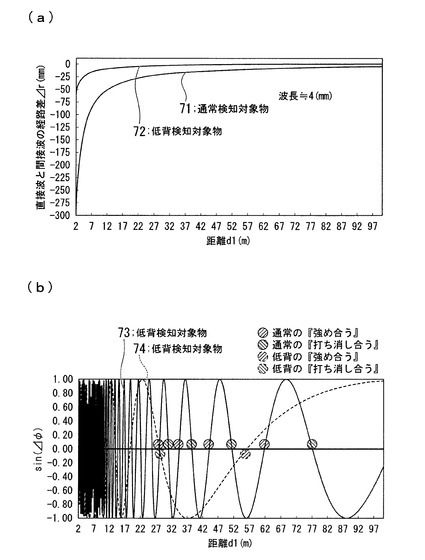
上記「強めあう箇所」と「打ち消しあう箇所」の発生数と帯域幅を具体的に示すために、図7は、図6と同じ条件下において伝搬経路差Δrと位相差Δφとを、「通常検知対象物」と「低背検知対象物」との間で比較したものである。図7(a)において、Δrの大きさは、「通常検知対象物」>>「低背検知対象物」である。必然的に、Δφの変動量も「通常検知対象物」>>「低背検知対象物」である。
【0069】
従って、図7(b)において、距離が変化したときのsin(Δφ)の変動量が、「通常検知対象物」>>「低背検知対象物」となっている。この距離が変化したときのΔrの変化量つまり距離が変化したときの位相差Δφの変動量により、「強め合う箇所」や「打ち消しあう箇所」の発生数が決定される。
【0070】
特に、車載レーダの主な使用範囲であるd1が30[m]前後からd1の最大値が百数十メートル程度の範囲においては、通常検知対象物にあっては「強めあう箇所」と「打ち消しあう箇所」は数回発生し、数メートルと数十メートルの帯域幅がある。一方、低背検知対象物は、「強め合う箇所」や「打ち消しあう箇所」は各1回発生し、数十メートルと数百メートルの帯域幅がある。以上のように顕著な差異が認められる。本発明の低背検知対象物の判別アルゴリズムは、この発生数と帯域幅の差異を識別することを原理としている。
【0071】
<低背検知対象物の判別アルゴリズム>
次に、低背検知対象物の判別アルゴリズムの概略について説明する。通常検知対象物と低背検知対象物とを識別する方法として、受信電力曲線と縦軸の値を受信電力の区間平均値とする直線とを境界として定まる領域の面積を用いた方法を説明する。
【0072】
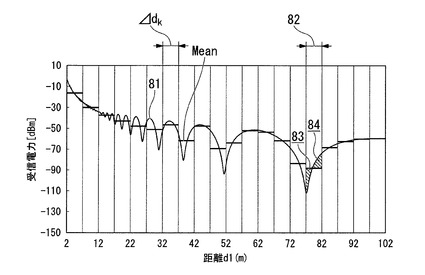
まず、図8に示すように、面積算出部28は、レーダと検知対象物との間の直接距離d1を、任意のN個の区間(Δd1,…,ΔdN)に分割する。例えば、区間を距離5[m]の間隔で区分けする。
面積算出部28は、それぞれの区間において、受信電力曲線81と縦軸の値を受信電力の区間平均値とする直線とを境界として定まる領域の面積を算出する。具体的には、例えば、区間82において、領域83と領域84の面積の和を算出する。
【0073】
図8に示すように、面積算出部28は各区間内で平均電力Meanを算出し、区間毎に受信電力から当該平均電力を減算した電力(以下、基準化電力と称する)を算出する。例えば、区間Δdk(kは1からNまでの整数)内にn点の受信電力P(Δdk,i)(iは1からnまでの整数)があるとすると、基準化電力p(Δdk,i)[dB]は、デシベル表記上の減算(リニア値では除算)を用いて、以下の式(1)で表される。
【0074】
【数1】

【0075】
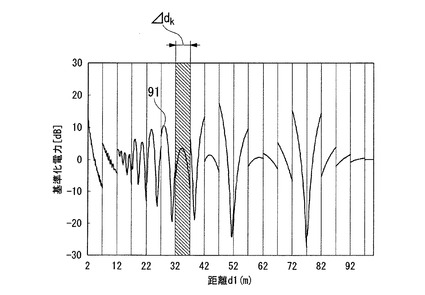
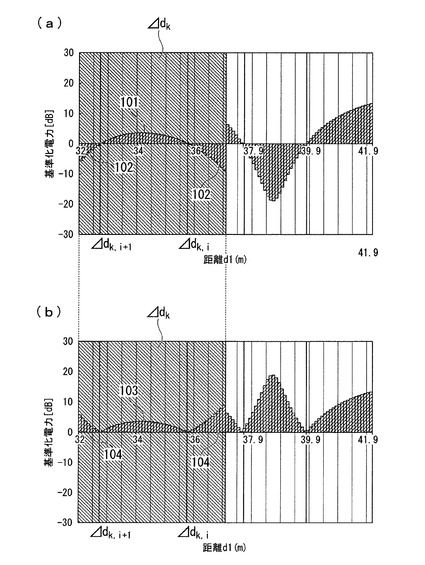
続いて、図9に、基準化電力の距離特性を示す。図9に示すように、基準化電力の曲線91はゼロ[dB]と交差する。ここで、図10(a)において、Δdkの区間に注目すると、基準化電力は、正の領域101と負の領域102が存在する。
面積算出部28は、図10(b)に示すように、基準化電力の絶対値|p(Δdk,i)|を算出し、当該基準化電力の絶対値に対して、区間内において積分を実施するための閉区間(図10(b)において塗りつぶされた領域、例えば103と104)を定める。
【0076】
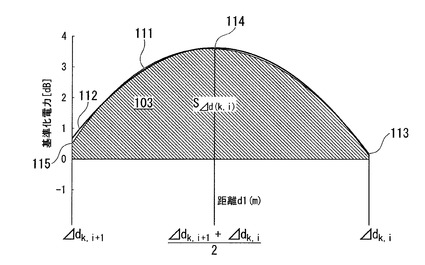
図11は、図10の領域103の拡大図である。基準化電力の絶対値111は、2次関数112で良く近似できる。面積算出部28は、シンプソンの公式を用いて、図11の領域103の近似面積を算出する。
【0077】
具体的には、シンプソンの公式を用いると、領域103の面積sΔd(k,i)は、端点113(d1=Δdk,i)と、端点115(d1=Δdk,i+1)と、その中間点114(d1=(Δdk,i+Δdk,i+1)/2)の距離d1とそれぞれの基準化電力p(d1)の値を用いて近似することができる。従って、面積算出部28は、領域103の面積を上記3つの座標の値のみを用いて近似し、以下の(2)式を用いて算出する。
【0078】
【数2】
【0079】
面積算出部28は、上記一連の処理を繰り返し、算出した面積sΔd(k,i)を逐次的に受信電力積分値Sに加算し、受信電力積分値Sを算出する。以上の処理は、以下の式(3)で表される。
【0080】
【数3】
【0081】
面積算出部28は、逐次的に更新した受信電力積分値Sをメモリ21に保存する。
図12(a)は、通常検知対象物の受信電力121と区間の平均値Maを表している。通常検知対象物の受信電力が急峻に変化している区間ほど、通常検知対象物の受信電力の曲線121と区間の平均値Maの直線で定まる領域の面積は大きくなる。
【0082】
上記のことを、具体例を挙げて説明する。例えば、区間122で算出される前記面積と区間123で算出される前記面積を比較する。区間122で算出される前記面積は、領域122aの面積と領域122bの面積の和である。一方、区間123で算出される前記面積は、領域123aの面積と領域123bの面積の和である。
【0083】
図12から明らかなように、領域123aは領域122aより縦軸方向の長さが長いので、領域123aは領域122aより面積が大きい。同様にして、領域123bは領域122bより縦軸方向の長さが長いので、領域123bは領域122bより面積が大きい。
以上のように、受信電力が急峻に変化している区間では、受信電力の変化幅が大きいために、算出される前記面積が大きくなる。
【0084】
一方、図12(a)は、低背検知対象物の受信電力124と区間の平均値Mbを表している。低背検知対象物の受信電力は、すべての区間で滑らかに変化しており急峻に変化していないので、どの区間をとっても、低背検知対象物の受信電力124の曲線と区間の平均値Mbの直線で定まる領域の面積は小さくなる。
【0085】
従って、通常検知対象物の受信電力の曲線と区間の平均値Maの直線で定まる領域の面積の和と、低背検知対象物の受信電力の曲線と区間の平均値Mbの直線で定まる領域の面積の和を比較した場合、通常検知対象物の受信電力の曲線と区間の平均値Maの直線で定まる領域の面積の和の方が大きくなる。
以上より、前記発生数が通常検知対象物の受信電力の曲線と区間の平均値の直線で定まる領域の面積という指標で表されることになる。
【0086】
なお、上記の実施例では、横軸を距離として面積を算出したが、横軸を時間に置き換えて面積を算出してもよい。
また、上記の実施例では、面積を算出する際の1つの境界として、縦軸の値を受信電力の区間平均値とする直線を用いたが、当該境界となる線は、縦軸の値を所定の値とする直線であれば何でもよい。例えば、前記直線は、縦軸の値を区間の最小値とする直線、縦軸の値を区間の最大値とする直線、または縦軸の値を区間の中央値とする直線でもよい。
【0087】
その検証のために、1例として、ある区間において受信電力曲線と縦軸の値を区間の最小値とする直線とを境界として定まる領域の面積を、通常検知対象物の場合と低背検知対象物の場合で比較する。図13(a)において、ある区間における通常検知対象物の場合の受信電力131の面積は、領域132で表される。
【0088】
一方、図13(b)において、ある区間における低背検知対象物の場合の受信電力133の面積は、領域134で表される。通常検知対象物の場合の基準化電力の変化量が低背検知対象物の場合の基準化電力の変化量と比べて大きいので、領域132の面積は領域134の面積よりも大きくなる。
【0089】
従って、前記発生数が受信電力曲線と縦軸の値を区間の最小値とする直線とを境界として定まる領域の面積という指標で表されることになる。また、受信電力曲線と縦軸の値を他の所定の値(例えば、区間の最大値または区間の中央値等)とする直線とを境界として定まる領域の面積も、同様の原理により、前記発生数を反映する指標となる。
【0090】
また、上記の実施例では、面積を算出する際の1つの境界として、縦軸の値を受信電力の区間平均値とする直線を用いたが、当該境界となる線は曲線でもよい。例えば、前記曲線は、自由空間伝搬減衰曲線でもよい。その検証のために、ある区間において受信電力曲線と自由空間伝搬減衰曲線とを境界として定まる領域の面積を、通常検知対象物の場合と低背検知対象物の場合で比較する。
【0091】
図13(c)において、通常検知対象物の場合、ある区間における受信電力曲線136と自由空間伝搬減衰曲線135とを境界として定まる領域の面積は、領域136aの面積と領域136bの面積の和で表される。一方、低背検知対象物の場合、ある区間における受信電力曲線137と自由空間伝搬減衰曲線135とを境界として定まる領域の面積は、領域137aの面積と領域137bの面積の和で表される。
【0092】
図13(c)から明らかなように、通常検知対象物において算出された面積が低背検知対象物において算出された面積より大きくなる。従って、面積を算出する際に、境界となる線は、曲線でもよい。
【0093】
なお、前記境界となる曲線は、前記自由空間伝搬減衰曲線に限らず、数次の最小二乗法を用いたある対象物の受信電力特性に対する近似曲線であってもよい。また、前記境界となる線は、所定の右肩下がりの線(直線および曲線を含む)であってもよい。
従って、面積を算出する際に、境界となる線は、直線でも曲線でもよく、予め決められた所定の線であればよい。
【0094】
<低背検知対象物の判別処理時の積分範囲>
続いて、低背検知対象物の判別処理の効率化と精度向上のために、積分範囲を指定することについて、図14を用いて説明する。図14において、141は検知閾値、142は通常検知対象物の受信電力曲線、143は自由空間伝搬減衰による受信電力の理論曲線、144は低背対象物の受信電力曲線、145aはΔd1からΔdNまでの積分範囲、145bは最も広範囲に打ち消しあう箇所、145cは近傍域である。
【0095】
低背検知対象物は、レーダ反射断面積が狭いために、帰還電力値が低い。計算量を極力抑えるために、面積算出部28は、予め検知閾値を上回ると推定される位置に開始点を定める。例えば、積分開始位置を図14のΔd1とする。
面積算出部28は、低背検知対象物の想定される最大の高さ条件で算出される結果を参照し、レーダの視野範囲で想定される最長距離に存在する最も広範囲に打ち消しあう箇所145bより距離が離れた位置で終点を定める。
【0096】
例えば、積分終了位置を図14のΔdNとする。従って、面積算出部28は、Δd1からΔdNまでの積分範囲145aにおいて、基準化電力の面積を算出する。
また、距離が20[m]以下の近傍域145cでは、アンテナ指向性が顕著に現れ始め、伝搬特性の様相が大きく変化するので、積分区間から除外することとする。
【0097】
<低背検知対象物の判別処理の積分結果>
図15は、低背検知対象物の判別処理の積分結果の例である。距離d1が47[m]付近に矢印で示した区間に注目すると、1閉区間に限った数値的な比較においても十分に大きな差異(最大で10から30倍)があることが分かる。
【0098】
面積算出部28は、順次、前記区間面積を区間面積の和に加算し、当該加算した区間面積の和をメモリ21に保存する。検知処理部29は、メモリ21から区間面積の和を読み出し、前記区間積分値の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定し、当該判別結果を物標出力処理部30に出力する。
【0099】
これによって、区間積分値の和で判別することにより、通常検知対象物と低背検知対象物の差をより大きく表現することができるので、非常に余裕をもった精度の高い判別ができる。
【0100】
なお、検知処理部29は、前記区間積分値のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定してもよい。
これによって、全ての区間積分値を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0101】
また、検知処理部29は、前記区間積分値が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定してもよい。
これによって、全ての区間積分値を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0102】
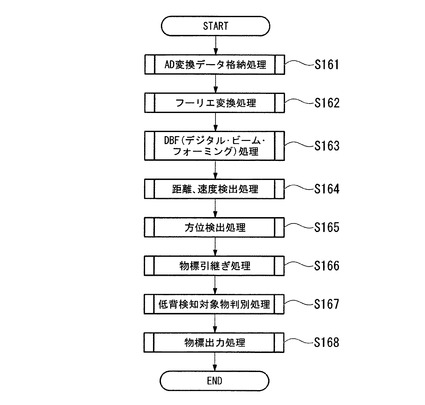
次に、物標抽出処理について、図14のフローチャートを参照して説明する。信号処理部20は、AD変換された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をメモリ21に格納する(ステップS161)。次に、受信電力算出部22は、各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をフーリエ変換し、信号レベルを算出する(ステップS162)。
【0103】
受信電力算出部22は、アンテナ毎に時間方向にフーリエ変換した値をDBF処理部23へ出力する。また、受信電力算出部22は、周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数を距離検出部24へ出力する。また、受信電力算出部22は、中心周波数f0、上昇部分の対象物周波数および下降部分の対象物周波数を速度検出部25へ出力する。また、受信電力算出部22は、受信電力を距離の関数として、面積算出部28へ出力する。また、受信電力算出部22は、受信波の強度を検出できなかった場合、物標候補がないことを物標出力処理部30に出力する。
【0104】
次に、DBF処理部23は、受信電力算出部22から入力されたアンテナ毎に時間方向にフーリエ変換した値を、アンテナの配列方向にさらにフーリエ変換を行い、角度分解能に対応した角度チャネル毎の空間複素数を計算し、ビート周波数毎に方位検出部26へ出力する(ステップS163)。
【0105】
次に、距離検出部24は、受信電力算出部22から入力される周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数から、距離を算出する(ステップS164)。また、速度検出部25は、受信電力算出部22から入力される中心周波数、上昇部分の対象物周波数および下降部分の対象物周波数から、相対速度を算出する(ステップS164)。
【0106】
次に、方位検出部26は、算出されたビート周波数毎の空間複素数のうち、一番振幅が大きな値を取る角度を、対象物が存在する方位として物標引継ぎ処理部27に出力する(ステップS165)。
【0107】
次に、物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、メモリ21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定し、メモリ内の対象物の距離、相対速度、方位の値を更新し、面積算出部28へ対象物の識別番号を出力する(ステップS166)。
【0108】
次に、面積算出部28は、受信電力算出部22から出力された距離の関数である受信電力を受け取る。面積算出部28は、所定の距離区間において、前記関数を表す曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出する。面積算出部28は、当該区間面積を順次、それまでに算出した区間面積の和に加算し、当該加算後の区間面積の和をメモリ21に保存する。
【0109】
検知処理部29は、メモリ21から区間面積の和を読み出し、当該面積の和に基づいて、対象物が低背検知対象物であるか否か判定し、対象物が低背検知対象物であるか通常検知対象物であるかの情報を物標出力処理部30へ出力する(ステップS167)。
【0110】
次に、物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として出力する(ステップS168)。物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが通常検知対象物である場合、自車の車線上にある対象物の識別番号を物標として出力する。
【0111】
また、物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが通常検知対象物の場合であって、2つ以上の対象物が自車の車線上にある場合、メモリ21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として出力する。以上で、本フローチャートは終了する。
【0112】
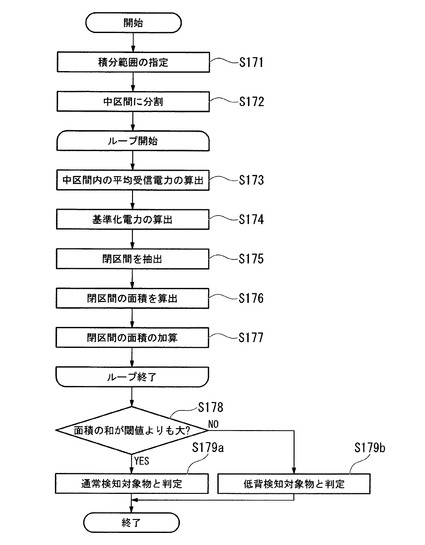
続いて、面積算出部28と検知処理部29における低背検知対象物の判別処理の詳細について、図15のフローチャートを用いて説明する。
まず、面積算出部28は、レーダと対象物との直接距離d1に対する積分範囲を指定する(ステップ S171)。次に、面積算出部28は、レーダと対象物との直接距離d1を任意の区間に分割する(ステップ S172)。
【0113】
次に、下記に示すステップS163からステップS167までを、レーダと対象物との直接距離d1がステップS161で指定した積分範囲にある限り、繰り返す。
まず、面積算出部28は、区間内の受信電力の平均(以下、平均受信電力と称する)を算出する(ステップ S173)。次に、面積算出部28は、当該区間内の受信電力から前記平均受信電力を減算することによって、基準化電力を算出する(ステップ S174)。
【0114】
次に、面積算出部28は、基準化電力を絶対値化して、基準化電力の絶対値化の曲線と距離d1の軸とに囲まれた閉区間を抽出する(ステップ S175)。次に、面積算出部28は、前記抽出した閉区間の面積を算出する(ステップ S176)。次に、面積算出部28は、メモリ21から前のループまでに算出した面積の和を読み出し、当該前のループまでに算出した面積の和に、前記算出した面積を加算し、当該加算後の面積の和をメモリ21に保存する(ステップ S177)。面積算出部28が、全ての区間で算出した面積を前記面積の和に加算し終わると、本ループは終了する。
【0115】
前記算出した面積の和が所定の閾値よりも大きい場合(ステップ S178 YES)、検知処理部29は、検知した対象物を通常検知対象物と判定し(ステップ S179a)、通常検知対象物であるという情報を物標出力処理部30へ出力する。
一方、前記算出した面積の和が所定の閾値以下の場合(ステップ S178 NO)、検知した対象物を低背検知対象物と判定し(ステップ S179b)、低背検知対象物であるという情報を物標出力処理部30へ出力する。以上で、本フローチャートは終了する。
【0116】
本実施例では、距離の関数として受信電力を算出したが、これに限らず、時間の関数であってもよい。例えば、対象物が止まっている場合、時間が経つとともに、レーダと対象物との距離が縮まる。これにより、受信電力を時間の関数と表した場合に、低背検知対象物からの受信電力曲線を1つの境界として定まる領域の面積の和は、通常検知対象物からの受信電力曲線を1つの境界として定まる領域の面積の和よりも小さくなる。従って、検知処理部29は、当該面積の和の差によって、低背検知対象物であるか否かを判定することができる。
【0117】
本実施例では、電子走査型レーダ装置を用いて説明したが、これに限らず、機械操作式レーダ装置であってもよい。機械操作式レーダ装置を用いた時の受信電力の距離に対する変化は、電子走査型レーダ装置を用いた時の受信電力の距離に対する変化と、等価なものだからである。
【0118】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0119】
11、1n 受信アンテナ
21、2n ミキサ
3 送信アンテナ
4 分配器
51、5n フィルタ
6 SW
7 ADC
8 制御部
9 三角波生成部
10 VOC
20 信号処理部
21 メモリ
22 受信電力算出部
23 DBF処理部
24 距離検出部
25 速度検出部
26 方位検出部
27 物標引継ぎ処理部
28 面積算出部
29 検知処理部
30 物標出力処理部
【技術分野】
【0001】
本発明は、レーダ装置およびコンピュータプログラムに関する。
【背景技術】
【0002】
従来、ミリ波レーダ(以後、レーダ)は、通常、自動車の車体前方に搭載され、車間警報、車速制御などに用いられている。車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが用いられている。
【0003】
レーダを搭載した自車の周囲に障害物が存在する場合、車載レーダは自車と障害物との相対的な距離、方位、速度などの情報を有した物標データを車間警報、車速制御システムに出力する。車間警報、車速制御システムは、その物標の位置情報に応じて、自車と障害物との距離を維持させたり、衝突が予想される場合には警報を発したり、自車を減速させたりするといった自車の制御(以下、衝突軽減制御と称する)を行う(例えば、特許文献1参照)。そのため、車載レーダは、自車両に衝突する危険性がある対象物を迅速にかつ正確に検知する性能が要求されている。
【0004】
一方、自車両の周囲に障害物が存在しない場合、レーダは何も検知しないため、レーダは物標データを車速制御システムに出力しない。その場合、車速制御システム及び操舵制御システムは自車両をあらかじめ設定された車速と操舵にて走行させるよう制御を行う。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−275840号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、自車の周囲に障害物が存在するが、それが車両床高に比べて十分に低い検知対象物(以下、低背検知対象物と称する)である場合には、低背検知対象物は、自車の進行を妨げるものではない為、車間警報を発せず、車速制御システム及び操舵制御システムは自車をあらかじめ設定された車速と操舵にて走行させるよう制御を行うべきである。
【0007】
しかしながら、高さ方向の分解能がない車載レーダは、アンテナ特性と低背検知対象物の反射強度によっては、低背検知対象物を走行の妨げとなる障害物と誤認してしまうという問題があった。そうすると、衝突事故が物理的に発生しない安全な走行状況にも関わらず、車両制御機器は上記レーダの誤認により衝突の危険性がある状況であると判断してしまう。この誤判断が原因で、不要な警報の発信または不要な自車の減速といった制御が行われ、運転者への不快をもたらしてしまう。また、自車の不要な減速は、後続車両との追突リスクを高める原因となる。
【0008】
そこで本発明は、上記問題に鑑みてなされたものであり、レーダで検知した対象物が低背検知対象物であるか否か判別することができるレーダ装置及びコンピュータプログラムを提供することを課題とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部と、前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部と、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、を備えることを特徴とする。
上記レーダ装置によれば、受信電力をレーダと対象物との距離の関数として表すことにより、レーダが検知した対象物が低背検知対象物か否か判別することができる。
【0010】
上記レーダ装置の前記検知処理部は、前記距離が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出するものであってもよい。
これによれば、レーダが検知した対象物が低背検知対象物か否か判別するのを効率化し、かつその精度を向上させることができる。
【0011】
上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、時間の関数として、前記受信された電波の電力を算出する受信電力算出部と、所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、を備えることを特徴とするレーダ装置。
上記レーダ装置によれば、受信電力を時間の関数として表すことにより、レーダが検知した対象物が低背検知対象物か否か判別することができる。
【0012】
上記レーダ装置の前記検知処理部は、前記時間が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出するものであってもよい。
これによれば、レーダが検知した対象物が低背検知対象物か否か判別するのを効率化し、かつその精度を向上させることができる。
【0013】
上記レーダ装置の前記面積算出部は、前記曲線と所定の直線とを境界として定まる領域の面積または前記曲線と所定の曲線とを境界として定まる領域の面積を算出するものであってもよい。
これによれば、所定の区間において、前記曲線と所定の直線とを境界として定まる領域(閉じた空間)の面積を算出することにより、低背検知対象物の場合において算出される面積と通常検知対象物において算出される面積との差を検出することができるので、対象物が低背検知対象物であるか判定することができる。
【0014】
上記レーダ装置の前記面積算出部は、前記曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出するものであってもよい。
これによれば、低背検知対象物の場合において算出される面積と通常検知対象物において算出される面積との差を大きくすることができるので、対象物が低背検知対象物であるか精度良く判定することができる。
【0015】
上記レーダ装置の前記検知処理部は、前記面積の複数区間の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、区間面積の和を判定の基準とすることにより、通常検知対象物と低背検知対象物の差をより大きく表現することができるので、閾値の設定に余裕を持たせることができ、精度の高い判別ができる。
【0016】
上記レーダ装置の前記検知処理部は、複数区間の前記面積のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、全ての区間面積を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0017】
上記電子走査型レーダ装置の前記検知処理部は、前記面積が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定するものであってもよい。
これによれば、全ての区間面積を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0018】
上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、受信アンテナにより受信された電波に基づいて前記対象物までの距離を検出する第1のステップと、前記検出した距離の関数として、前記受信された電波の電力を算出する第2のステップと、所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第3のステップと、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第4のステップと、をコンピュータに実行させる。
このコンピュータプログラムによれば、受信電力を距離の関数として表すことにより、レーダで検知した対象物が低背検知対象物か否か判別することができる。
【0019】
上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、時間の関数として、前記受信された電波の電力を算出する第1のステップと、所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第2のステップと、前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第3のステップと、をコンピュータに実行させるためのコンピュータプログラム。
このコンピュータプログラムによれば、受信電力を時間の関数として表すことにより、レーダで検知した対象物が低背検知対象物か否か判別することができる。
【発明の効果】
【0020】
本発明によれば、レーダで検知した対象物が低背検知対象物であるか否か判別することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態である電子走査型レーダ装置の構成例を示すブロック図である。
【図2】送信波及び受信波により、三角波の上昇領域及び下降領域におけるビート信号の生成を説明する概念図である。
【図3】複数本のアンテナの配列している面に対して垂直方向の軸に対する反射波の到来角度を算出する方法を示した図である。
【図4】車両の前方に空き缶が存在する走行条件モデルを説明する図である。
【図5】レーダの受信電力値と仰角度との関係を示した図である。
【図6】通常検知対象物の受信電力値の距離特性と、低背検知対象物の受信電力値の距離特性を示した図である。
【図7】直接波と間接波の経路差の距離特性と位相差の正弦値の距離特性を示した図である。
【図8】任意の区間と、低背検知対象物を検知したときの受信電力値の基準化値を説明するための図である。
【図9】基準化電力の距離特性を示した図である。
【図10】閉区間の抽出と当該閉区間の面積の算出を説明するための図である。
【図11】閉区間の面積の算出例を示した図である。
【図12】通常検知対象物の受信電力曲線および区間平均値と、低背検知対象物の受信電力曲線および区間平均値とを比較するための図である。
【図13】通常検知対象物の基準化電力の面積と低背検知対象物の基準化電力の面積とを比較するための図である。
【図14】基準化電力の絶対値の積分範囲を指定する方法を説明するための図である。
【図15】区間毎の積分値の距離特性を示した図である。
【図16】物標抽出処理全体のフローチャートである。
【図17】低背検知対象物の判別処理のフローチャートである。
【発明を実施するための形態】
【0022】
以下、本発明の実施形態による電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。図1は同実施形態の構成例を示すブロック図である。
【0023】
この図において、本実施形態による電子走査型レーダ装置は、受信アンテナ11〜1nと、ミキサ21〜2nと、送信アンテナ3と、分配器4と、フィルタ51〜5nと、SW(スイッチ)6と、ADC(A/Dコンバータ)7と、制御部8と、三角波生成部9と、VCO(Voltage Controlled Oscillator)10と、信号処理部20とを用いて構成されている。
【0024】
上記信号処理部20は、メモリ21と、受信電力算出部22と、DBF検知部23と、距離検出部24と、速度検出部25と、方位確定部26と、物標引継ぎ処理部27と、面積算出部28と、検知処理部29と、物標出力処理部30とを用いて構成されている。
【0025】
次に、図1を参照して、本実施形態による電子走査型レーダ装置の動作を説明する。
受信アンテナ11〜1nは、送信波が対象物にて反射し、この対象物から到来する反射波、すなわち受信波を受信する。
ミキサ21〜2n各々は、送信アンテナ3から送信される送信波と、各受信アンテナ11〜1nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
【0026】
上記送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO10において周波数変調した送信信号を対象物に対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、上記ミキサ21〜2nおよび送信アンテナ3に分配する。
【0027】
フィルタ51〜5n各々は、それぞれミキサ21〜2nにおいて生成された各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を出力する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ51〜5n各々を通過した各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(A/Dコンバータ)7に出力する。
【0028】
ADC7は、上記SW6から上記サンプリング信号に同期して入力される各受信アンテナ11〜1n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期してA/D変換してデジタル信号に変換し、信号処理部20におけるメモリ21の波形記憶領域に順次記憶させる。
【0029】
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図7に示す電子走査型レーダ装置全体の制御を行う。
信号処理部20内のメモリ21は、A/Dコンバータ7においてデジタル変換されたデジタル信号を各受信アンテナ11〜1nに対応したチャンネルごとに格納する。
【0030】
<距離、相対速度、水平角度(方位)を検出する原理>
次に、図2を用いて、本実施形態における信号処理部20において用いられる、電子走査型レーダ装置と対象物との距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
【0031】
図2は、図1の三角波生成部9において生成された信号をVCO10において、中心周波数f0、変調幅Δfで周波数変調した送信信号と、その送信信号が対象物に反射されて受信信号として入力される状態を示す。図2の例は対象物が1つの場合を示している。
【0032】
図2(a)に示すように、送信する信号に対し、対象物からの反射波である受信信号が、レーダと対象物との距離に応じて右方向(時間遅れ方向)に遅延されて受信される。さらに、ドップラー効果によって対象物との相対速度に応じて、送信信号に対して上下方向(周波数方向)に変動する。
【0033】
受信電力算出部22は、メモリ21に格納された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号(図2(a)の下図)に対して、フーリエ変換を行う。ここで、フーリエ変換後の複素数データの振幅を信号レベルと呼ぶこととする。
【0034】
受信電力算出部22は、何れかのアンテナにおける複素数データまたは、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値に対応するビート周波数、すなわち距離に依存した対象物の存在として検出することができる。ここで、全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0035】
フーリエ変換の結果、図2(b)に示されるように、対象物が1つの場合、上昇領域及び下降領域にそれぞれに1つのピーク値を有することなる。ここで、図8(b)は横軸が周波数、縦軸が信号強度となっている。
【0036】
そして、受信電力算出部22は、図2(b)に示すビート周波数毎の信号レベルから、予め設定された数値(閾値)を超える信号レベルを検出することによって、対象物が存在していることを判定する。ここで、信号レベルのピーク値を受信波の強度と称す。
【0037】
受信電力算出部22は、信号レベルのピークを検出した場合、ピーク値のビート周波数(ビート信号の上り部分及び下り部分の双方)を対象物周波数として距離検出部24、速度検出部25へ出力する。受信電力算出部22は、周波数変調幅Δfを距離検出部24へ出力し、中心周波数f0を速度検出部25へ出力する。
【0038】
また、受信電力算出部22は、信号レベルの下り部分のピーク値の二乗を受信電力として算出する。後述する距離検出部24から入力された対象物との距離の関数として、前記受信電力を面積算出部28へ出力する。
【0039】
受信電力算出部22は、信号レベルのピークを検出できなかった場合、物標候補がないという情報を物標出力処理部30に出力する。
なお、ビート信号の上り部分のピーク値、またはビート信号の上り部分のピーク値とビート信号の下り部分のピーク値の平均を信号レベルとして使用してもよい。
【0040】
複数の対象物が存在する場合、フーリエ変換後には、ビート信号の上り部分とビート信号の下り部分のそれぞれに対象物の数と同じ数のピークが表れる。レーダと対象物の距離に比例して、受信信号が遅延し、図2(a)の上段における受信信号は右方向にシフトするので、レーダと対象物との距離が離れるほど、図2(a)の下段におけるビート信号の周波数は大きくなる。
【0041】
複数の対象物に対応する信号レベルのピークが複数検出された場合には、上りの部分および下りの部分のピーク値ごとに、周波数が小さいものから順番に番号をつけて、検知処理部29へ出力する。ここで、上りおよび下りの部分において、同じ番号のピークは、同じ対象物に対応しており、それぞれの識別番号を対象物の番号とする。
【0042】
次に、距離検出部24は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により距離rを算出し、受信電力算出部22と物標引継ぎ処理部27へ出力する。
r={C・T/(2・Δf)}・{(fu+fd)/2}
【0043】
また、速度検出部25は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により相対速度vを算出し、物標引継ぎ処理部27へ出力する。
v={C/(2・f0)}・{(fu−fd)/2}
【0044】
上記距離r及び相対速度vを算出する式において、Cは光速度、Tは変調時間(上昇部分/下降部分)、fuは上昇部分における対象物周波数、fdは下降部分における対象物周波数である。
【0045】
次に、本実施形態における受信アンテナ11〜1nは、図1に示すように、間隔dにより配置されたアレー状のアンテナである。上記受信アンテナ11〜1nには、アンテナの配列している面に対する垂直方向の軸との角度φ方向から入射される、対象物からの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対する対象物からの反射波)が入力する。
【0046】
このとき、上記到来波は、上記受信アンテナ11〜1nにおいて同一角度φにて受信される。端ともう1端の受信アンテナ間にて発生する受信信号の位相差は、受信信号の周波数f、端ともう1端の受信アンテナ間の間隔dn−1および角度φから、位相差は、2πf・(dn−1・sinφ/C)で算出される。
【0047】
上記位相差を利用して、DBF(デジタルビームフォーミング)処理部23は、入力される各アンテナに対応した時間軸でフーリエ変換された複素データを、アンテナの配列方向にさらにフーリエ変換し、すなわち空間軸フーリエ変換を行う。そして、DBF処理部23は、角度分解能に対応した角度チャネル毎のスペクトルの強度を示す空間複素数データを算出し、ビート周波数毎に方位検出部26に出力する。
【0048】
方位検出部26は、算出されたビート周波数毎の空間複素数データの値の大きさのうち、一番大きな値を取る角度φを対象物が存在する方位として物標引継ぎ処理部27に出力する。
【0049】
物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、メモリ
21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそ
れぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル
前に検知した対象物と今回検知した対象物を同じものと判定する。
【0050】
その場合、物標引継ぎ処理部27は、メモリ21から読み出したその対象物の物標引継ぎ処理回数を1増やす。そうでない場合には、物標引継ぎ処理部27は、新しい対象物を検知したとみなす。また、物標引継ぎ処理部27は今回の対象物の距離、相対速度、方位およびその対象物の物標引継ぎ処理回数をメモリ21に保存する。また、物標引継ぎ処理部27は、検知処理部29へ対象物の識別番号を出力する。
【0051】
面積算出部28は、受信電力算出部22から前記検出した距離の関数としての前記受信された電波の電力を受け取る。
面積算出部28は、所定の距離区間において、前記関数を表す曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出する。
面積算出部28は、前記面積をこれまで算出した面積の和に加算し、当該加算後の面積の和をメモリ21に保存する。
【0052】
検知処理部29は、メモリ21から前記加算後の面積の和を読み出し、後述する低背検知対象物の判別アルゴリズムを用いて、対象物が衝突の危険性が伴う通常検知対象物であるか走行に支障をきたさない低背検知対象物であるかを判別し、当該判別結果を物標出力処理部30に出力する。これによって、対象物が衝突の危険性を伴う通常検知対象物である場合に、衝突を回避するために減速するか、または運転手に注意を促すために警報を発することができる。
【0053】
物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として出力する。物標出力処理部30は、検知処理部29から、複数の対象物の判別結果を受け取り、そのどちらもが通常検知対象物である場合、自車の車線上にある対象物の識別番号を物標として出力する。
【0054】
また、物標出力処理部30は、複数の対象物の判別結果を受け取り、そのどちらもが通常検知対象物である場合であって、2つ以上の対象物が自車の車線上にある場合、メモリ21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として出力する。なお、物標出力処理部30は、対象物が低背検知対象物である場合、または受信電力算出部22から物標候補がないという情報が入力された場合には、物標なしという情報を出力する。
【0055】
<低背検知対象物のレーダによる検知のシミュレーション結果>
低背検知対象物のレーダによる検知のシミュレーション結果を説明する前に、まず、その条件について説明する。図4は、車両41のまっすぐ前方に空き缶42があることを想定したyz平面上の走行条件のモデルである。d1は車両41と低背検知対象物の1例である空き缶42の直接距離、r1は対象物への電磁波の直接波伝搬経路、r2とr3は、対象物への電磁波の間接波伝搬経路である。h1は車載レーダの高さ、h2は空き缶の高さ、h3は車両床高である。
【0056】
図5に示すように、アンテナ条件については、半値幅43を4[deg]、メインローブの受信電力とサイドローブの受信電力の比(以下、サイドローブ比と称する)44を45[dB]とすることとする。
【0057】
続いて、車両が衝突する危険性が有る通常検知対象物が車両前方に存在する場合におけるシミュレーションの条件について説明する。シミュレーションの条件は、以下の通りである。図4の車載レーダはミリ波帯域電波を用いることとし、レーダの設置高h1は0.55[m]とする。レーダの伝搬波の直進性が強いので、対象物体の反射面の高さh2をレーダの設置高h1と同じ高さである0.55[m]とする。RCS(Rader Cross Section、レーダ反射断面積)は0[dB]とする。
【0058】
図6(a)は、車両が衝突する危険性が有る通常検知対象物が車両前方に存在する場合におけるレーダ受信電力の距離特性を示したシミュレーション結果である。横軸は図4で示した自車両と検知対象物との直線距離d1、縦軸は、受信電力であり、受信電力が1[mW]時に0[dBm]となるように計算されている。
【0059】
また、−70[dBm]が検知閾値THaであり、検知閾値THa以上の領域(検知域63a)では、レーダは受信波を検知することができるが、検知閾値THaよりも小さい領域(非検知域64a)では、レーダは受信波を検知することができない。通常検知対象物の場合、受信電力曲線61aは、直接距離d1に応じて、激しく変動している。
【0060】
続いて、車両が衝突する危険性が無い低背検知対象物が車両前方に存在する場合におけるシミュレーションの条件について説明する。シミュレーションの条件は、以下の通りである。図4の車載レーダはミリ波帯域電波を用いることとし、レーダの設置高h1は0.55[m]とする。対象物体の路面からの高さh2を0.1[m]とする。空き缶等を想定し、RCSを図6(a)の場合よりも十分に小さい値(−10[dB])とする。
【0061】
図6(b)は、車両が衝突する危険性が無い低背検知対象物が車両前方に存在する場合におけるレーダ受信電力の距離特性を示したシミュレーション結果である。横軸は図4で示した自車両と検知対象物との直線距離d1、縦軸は、受信電力であり、受信電力が1[mW]時に0[dBm]となるように計算されている。
【0062】
また、−70[dBm]が検知閾値THbであり、検知閾値THb以上の領域(検知域63b)では、レーダは受信波を検知することができるが、検知閾値THbよりも小さい領域(非検知域64b)では、レーダは受信波を検知することができない。低背検知対象物の場合、受信電力曲線61bは、通常検知対象物の場合の受信電力曲線61aと比べて、直接距離d1に応じて変化する量が少ない。
【0063】
図6(a)と図6(b)の結果から、検知閾値を越える全ての対象物を衝突危険対象物とするならば、直接距離d1が90[m]以下では、レーダは双方とも対象物を衝突危険対象物として判別してしまい、不要な衝突軽減制御を行ってしまうという問題がある。そこで、検知処理部29は、不要な衝突軽減制御を行わないために、以下に説明するアルゴリズムを用いて走行に支障をきたさない低背検知対象物に対し、衝突の危険性が伴う通常検知対象物を判別する。
【0064】
<低背検知対象物の判別アルゴリズムの原理>
次に、面積算出部28と検知処理部29における、低背検知対象物の判別アルゴリズムの原理について説明する。
図4に示すように、レーダから掃射された電磁波は直接波伝搬経路r1と間接波伝搬経路(r2とr3を合わせた経路、以下、総称してr4と略す)の2つのルートを介して反射点である検知対象物へ到達して合成される。さらに、この合成波は、反射点で再掃射されて、同じくr1の経路とr4の経路を伝搬し、到達点である車載レーダで再度合成される。
【0065】
この経路の異なる2つの伝搬波の合成が原因となり、レーダと検知対象物との直接距離d1に応じて変化する受信電力に「強めあう箇所」と「打ち消しあう箇所」が発生する。このような現象において、図4に示すレーダの高さh1と検知対象物の高さh2は、当該強めあう箇所と打ち消しあう箇所の発生数(以下、発生数と称す)を決定付ける主要因となっている。
【0066】
具体的には、直接波伝播経路r1に対する間接波伝播経路r4との差によって、到達点で観測される直接波と間接波間に位相差が生じる。そのような位相差をもった2つの波の合成によって、受信電力特性に「強め合う箇所」や「打ち消しあう箇所」が発生する。
距離d1が変化したときの直接波と間接波の経路差の変化量は、低背検知対象物より通常検知対象物の方が大きい。
【0067】
ここで、距離d1に応じて経路差Δr(但し、Δr=r4−r1とする)が変化するほど、位相差も同じく変化することから、距離d1が変化したときの直接波と間接波の位相差の変化量は、低背検知対象物より通常検知対象物の方が多い。
また、ある所定の距離の区間において前記発生数が多ければ多いほど、隣接する強めあう箇所と打ち消しあう箇所との間の距離(以下、帯域幅と称す)が小さくなる。
【0068】
上記「強めあう箇所」と「打ち消しあう箇所」の発生数と帯域幅を具体的に示すために、図7は、図6と同じ条件下において伝搬経路差Δrと位相差Δφとを、「通常検知対象物」と「低背検知対象物」との間で比較したものである。図7(a)において、Δrの大きさは、「通常検知対象物」>>「低背検知対象物」である。必然的に、Δφの変動量も「通常検知対象物」>>「低背検知対象物」である。
【0069】
従って、図7(b)において、距離が変化したときのsin(Δφ)の変動量が、「通常検知対象物」>>「低背検知対象物」となっている。この距離が変化したときのΔrの変化量つまり距離が変化したときの位相差Δφの変動量により、「強め合う箇所」や「打ち消しあう箇所」の発生数が決定される。
【0070】
特に、車載レーダの主な使用範囲であるd1が30[m]前後からd1の最大値が百数十メートル程度の範囲においては、通常検知対象物にあっては「強めあう箇所」と「打ち消しあう箇所」は数回発生し、数メートルと数十メートルの帯域幅がある。一方、低背検知対象物は、「強め合う箇所」や「打ち消しあう箇所」は各1回発生し、数十メートルと数百メートルの帯域幅がある。以上のように顕著な差異が認められる。本発明の低背検知対象物の判別アルゴリズムは、この発生数と帯域幅の差異を識別することを原理としている。
【0071】
<低背検知対象物の判別アルゴリズム>
次に、低背検知対象物の判別アルゴリズムの概略について説明する。通常検知対象物と低背検知対象物とを識別する方法として、受信電力曲線と縦軸の値を受信電力の区間平均値とする直線とを境界として定まる領域の面積を用いた方法を説明する。
【0072】
まず、図8に示すように、面積算出部28は、レーダと検知対象物との間の直接距離d1を、任意のN個の区間(Δd1,…,ΔdN)に分割する。例えば、区間を距離5[m]の間隔で区分けする。
面積算出部28は、それぞれの区間において、受信電力曲線81と縦軸の値を受信電力の区間平均値とする直線とを境界として定まる領域の面積を算出する。具体的には、例えば、区間82において、領域83と領域84の面積の和を算出する。
【0073】
図8に示すように、面積算出部28は各区間内で平均電力Meanを算出し、区間毎に受信電力から当該平均電力を減算した電力(以下、基準化電力と称する)を算出する。例えば、区間Δdk(kは1からNまでの整数)内にn点の受信電力P(Δdk,i)(iは1からnまでの整数)があるとすると、基準化電力p(Δdk,i)[dB]は、デシベル表記上の減算(リニア値では除算)を用いて、以下の式(1)で表される。
【0074】
【数1】
【0075】
続いて、図9に、基準化電力の距離特性を示す。図9に示すように、基準化電力の曲線91はゼロ[dB]と交差する。ここで、図10(a)において、Δdkの区間に注目すると、基準化電力は、正の領域101と負の領域102が存在する。
面積算出部28は、図10(b)に示すように、基準化電力の絶対値|p(Δdk,i)|を算出し、当該基準化電力の絶対値に対して、区間内において積分を実施するための閉区間(図10(b)において塗りつぶされた領域、例えば103と104)を定める。
【0076】
図11は、図10の領域103の拡大図である。基準化電力の絶対値111は、2次関数112で良く近似できる。面積算出部28は、シンプソンの公式を用いて、図11の領域103の近似面積を算出する。
【0077】
具体的には、シンプソンの公式を用いると、領域103の面積sΔd(k,i)は、端点113(d1=Δdk,i)と、端点115(d1=Δdk,i+1)と、その中間点114(d1=(Δdk,i+Δdk,i+1)/2)の距離d1とそれぞれの基準化電力p(d1)の値を用いて近似することができる。従って、面積算出部28は、領域103の面積を上記3つの座標の値のみを用いて近似し、以下の(2)式を用いて算出する。
【0078】
【数2】
【0079】
面積算出部28は、上記一連の処理を繰り返し、算出した面積sΔd(k,i)を逐次的に受信電力積分値Sに加算し、受信電力積分値Sを算出する。以上の処理は、以下の式(3)で表される。
【0080】
【数3】
【0081】
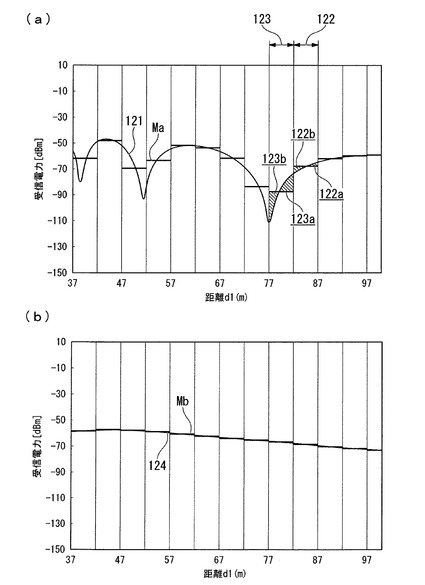
面積算出部28は、逐次的に更新した受信電力積分値Sをメモリ21に保存する。
図12(a)は、通常検知対象物の受信電力121と区間の平均値Maを表している。通常検知対象物の受信電力が急峻に変化している区間ほど、通常検知対象物の受信電力の曲線121と区間の平均値Maの直線で定まる領域の面積は大きくなる。
【0082】
上記のことを、具体例を挙げて説明する。例えば、区間122で算出される前記面積と区間123で算出される前記面積を比較する。区間122で算出される前記面積は、領域122aの面積と領域122bの面積の和である。一方、区間123で算出される前記面積は、領域123aの面積と領域123bの面積の和である。
【0083】
図12から明らかなように、領域123aは領域122aより縦軸方向の長さが長いので、領域123aは領域122aより面積が大きい。同様にして、領域123bは領域122bより縦軸方向の長さが長いので、領域123bは領域122bより面積が大きい。
以上のように、受信電力が急峻に変化している区間では、受信電力の変化幅が大きいために、算出される前記面積が大きくなる。
【0084】
一方、図12(a)は、低背検知対象物の受信電力124と区間の平均値Mbを表している。低背検知対象物の受信電力は、すべての区間で滑らかに変化しており急峻に変化していないので、どの区間をとっても、低背検知対象物の受信電力124の曲線と区間の平均値Mbの直線で定まる領域の面積は小さくなる。
【0085】
従って、通常検知対象物の受信電力の曲線と区間の平均値Maの直線で定まる領域の面積の和と、低背検知対象物の受信電力の曲線と区間の平均値Mbの直線で定まる領域の面積の和を比較した場合、通常検知対象物の受信電力の曲線と区間の平均値Maの直線で定まる領域の面積の和の方が大きくなる。
以上より、前記発生数が通常検知対象物の受信電力の曲線と区間の平均値の直線で定まる領域の面積という指標で表されることになる。
【0086】
なお、上記の実施例では、横軸を距離として面積を算出したが、横軸を時間に置き換えて面積を算出してもよい。
また、上記の実施例では、面積を算出する際の1つの境界として、縦軸の値を受信電力の区間平均値とする直線を用いたが、当該境界となる線は、縦軸の値を所定の値とする直線であれば何でもよい。例えば、前記直線は、縦軸の値を区間の最小値とする直線、縦軸の値を区間の最大値とする直線、または縦軸の値を区間の中央値とする直線でもよい。
【0087】
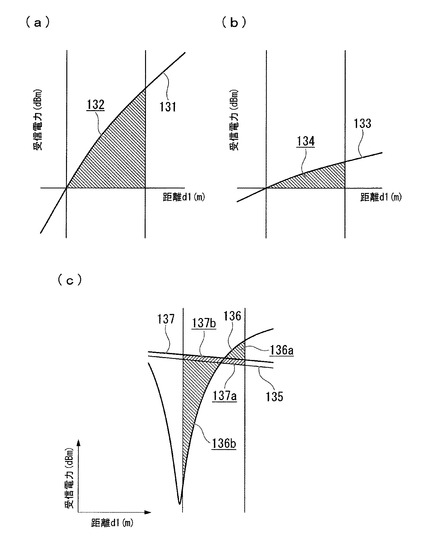
その検証のために、1例として、ある区間において受信電力曲線と縦軸の値を区間の最小値とする直線とを境界として定まる領域の面積を、通常検知対象物の場合と低背検知対象物の場合で比較する。図13(a)において、ある区間における通常検知対象物の場合の受信電力131の面積は、領域132で表される。
【0088】
一方、図13(b)において、ある区間における低背検知対象物の場合の受信電力133の面積は、領域134で表される。通常検知対象物の場合の基準化電力の変化量が低背検知対象物の場合の基準化電力の変化量と比べて大きいので、領域132の面積は領域134の面積よりも大きくなる。
【0089】
従って、前記発生数が受信電力曲線と縦軸の値を区間の最小値とする直線とを境界として定まる領域の面積という指標で表されることになる。また、受信電力曲線と縦軸の値を他の所定の値(例えば、区間の最大値または区間の中央値等)とする直線とを境界として定まる領域の面積も、同様の原理により、前記発生数を反映する指標となる。
【0090】
また、上記の実施例では、面積を算出する際の1つの境界として、縦軸の値を受信電力の区間平均値とする直線を用いたが、当該境界となる線は曲線でもよい。例えば、前記曲線は、自由空間伝搬減衰曲線でもよい。その検証のために、ある区間において受信電力曲線と自由空間伝搬減衰曲線とを境界として定まる領域の面積を、通常検知対象物の場合と低背検知対象物の場合で比較する。
【0091】
図13(c)において、通常検知対象物の場合、ある区間における受信電力曲線136と自由空間伝搬減衰曲線135とを境界として定まる領域の面積は、領域136aの面積と領域136bの面積の和で表される。一方、低背検知対象物の場合、ある区間における受信電力曲線137と自由空間伝搬減衰曲線135とを境界として定まる領域の面積は、領域137aの面積と領域137bの面積の和で表される。
【0092】
図13(c)から明らかなように、通常検知対象物において算出された面積が低背検知対象物において算出された面積より大きくなる。従って、面積を算出する際に、境界となる線は、曲線でもよい。
【0093】
なお、前記境界となる曲線は、前記自由空間伝搬減衰曲線に限らず、数次の最小二乗法を用いたある対象物の受信電力特性に対する近似曲線であってもよい。また、前記境界となる線は、所定の右肩下がりの線(直線および曲線を含む)であってもよい。
従って、面積を算出する際に、境界となる線は、直線でも曲線でもよく、予め決められた所定の線であればよい。
【0094】
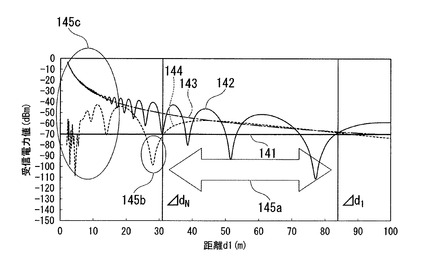
<低背検知対象物の判別処理時の積分範囲>
続いて、低背検知対象物の判別処理の効率化と精度向上のために、積分範囲を指定することについて、図14を用いて説明する。図14において、141は検知閾値、142は通常検知対象物の受信電力曲線、143は自由空間伝搬減衰による受信電力の理論曲線、144は低背対象物の受信電力曲線、145aはΔd1からΔdNまでの積分範囲、145bは最も広範囲に打ち消しあう箇所、145cは近傍域である。
【0095】
低背検知対象物は、レーダ反射断面積が狭いために、帰還電力値が低い。計算量を極力抑えるために、面積算出部28は、予め検知閾値を上回ると推定される位置に開始点を定める。例えば、積分開始位置を図14のΔd1とする。
面積算出部28は、低背検知対象物の想定される最大の高さ条件で算出される結果を参照し、レーダの視野範囲で想定される最長距離に存在する最も広範囲に打ち消しあう箇所145bより距離が離れた位置で終点を定める。
【0096】
例えば、積分終了位置を図14のΔdNとする。従って、面積算出部28は、Δd1からΔdNまでの積分範囲145aにおいて、基準化電力の面積を算出する。
また、距離が20[m]以下の近傍域145cでは、アンテナ指向性が顕著に現れ始め、伝搬特性の様相が大きく変化するので、積分区間から除外することとする。
【0097】
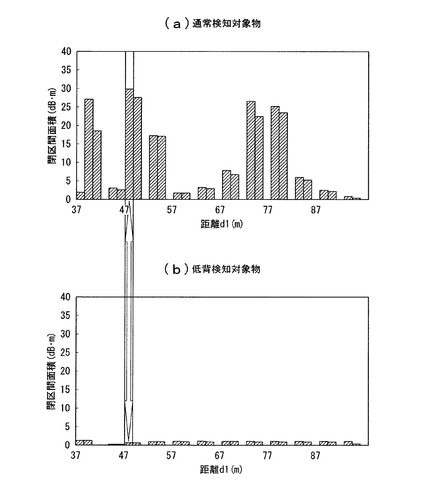
<低背検知対象物の判別処理の積分結果>
図15は、低背検知対象物の判別処理の積分結果の例である。距離d1が47[m]付近に矢印で示した区間に注目すると、1閉区間に限った数値的な比較においても十分に大きな差異(最大で10から30倍)があることが分かる。
【0098】
面積算出部28は、順次、前記区間面積を区間面積の和に加算し、当該加算した区間面積の和をメモリ21に保存する。検知処理部29は、メモリ21から区間面積の和を読み出し、前記区間積分値の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定し、当該判別結果を物標出力処理部30に出力する。
【0099】
これによって、区間積分値の和で判別することにより、通常検知対象物と低背検知対象物の差をより大きく表現することができるので、非常に余裕をもった精度の高い判別ができる。
【0100】
なお、検知処理部29は、前記区間積分値のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定してもよい。
これによって、全ての区間積分値を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0101】
また、検知処理部29は、前記区間積分値が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定してもよい。
これによって、全ての区間積分値を算出する前に判定することができるので、レーダと対象物との距離が離れているときでも、通常検知対象物と判定することができる。その結果、その後の車両の減速や対象物の回避行動を、時間的に余裕をもって行うことができる。
【0102】
次に、物標抽出処理について、図14のフローチャートを参照して説明する。信号処理部20は、AD変換された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をメモリ21に格納する(ステップS161)。次に、受信電力算出部22は、各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をフーリエ変換し、信号レベルを算出する(ステップS162)。
【0103】
受信電力算出部22は、アンテナ毎に時間方向にフーリエ変換した値をDBF処理部23へ出力する。また、受信電力算出部22は、周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数を距離検出部24へ出力する。また、受信電力算出部22は、中心周波数f0、上昇部分の対象物周波数および下降部分の対象物周波数を速度検出部25へ出力する。また、受信電力算出部22は、受信電力を距離の関数として、面積算出部28へ出力する。また、受信電力算出部22は、受信波の強度を検出できなかった場合、物標候補がないことを物標出力処理部30に出力する。
【0104】
次に、DBF処理部23は、受信電力算出部22から入力されたアンテナ毎に時間方向にフーリエ変換した値を、アンテナの配列方向にさらにフーリエ変換を行い、角度分解能に対応した角度チャネル毎の空間複素数を計算し、ビート周波数毎に方位検出部26へ出力する(ステップS163)。
【0105】
次に、距離検出部24は、受信電力算出部22から入力される周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数から、距離を算出する(ステップS164)。また、速度検出部25は、受信電力算出部22から入力される中心周波数、上昇部分の対象物周波数および下降部分の対象物周波数から、相対速度を算出する(ステップS164)。
【0106】
次に、方位検出部26は、算出されたビート周波数毎の空間複素数のうち、一番振幅が大きな値を取る角度を、対象物が存在する方位として物標引継ぎ処理部27に出力する(ステップS165)。
【0107】
次に、物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、メモリ21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定し、メモリ内の対象物の距離、相対速度、方位の値を更新し、面積算出部28へ対象物の識別番号を出力する(ステップS166)。
【0108】
次に、面積算出部28は、受信電力算出部22から出力された距離の関数である受信電力を受け取る。面積算出部28は、所定の距離区間において、前記関数を表す曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出する。面積算出部28は、当該区間面積を順次、それまでに算出した区間面積の和に加算し、当該加算後の区間面積の和をメモリ21に保存する。
【0109】
検知処理部29は、メモリ21から区間面積の和を読み出し、当該面積の和に基づいて、対象物が低背検知対象物であるか否か判定し、対象物が低背検知対象物であるか通常検知対象物であるかの情報を物標出力処理部30へ出力する(ステップS167)。
【0110】
次に、物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として出力する(ステップS168)。物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが通常検知対象物である場合、自車の車線上にある対象物の識別番号を物標として出力する。
【0111】
また、物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが通常検知対象物の場合であって、2つ以上の対象物が自車の車線上にある場合、メモリ21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として出力する。以上で、本フローチャートは終了する。
【0112】
続いて、面積算出部28と検知処理部29における低背検知対象物の判別処理の詳細について、図15のフローチャートを用いて説明する。
まず、面積算出部28は、レーダと対象物との直接距離d1に対する積分範囲を指定する(ステップ S171)。次に、面積算出部28は、レーダと対象物との直接距離d1を任意の区間に分割する(ステップ S172)。
【0113】
次に、下記に示すステップS163からステップS167までを、レーダと対象物との直接距離d1がステップS161で指定した積分範囲にある限り、繰り返す。
まず、面積算出部28は、区間内の受信電力の平均(以下、平均受信電力と称する)を算出する(ステップ S173)。次に、面積算出部28は、当該区間内の受信電力から前記平均受信電力を減算することによって、基準化電力を算出する(ステップ S174)。
【0114】
次に、面積算出部28は、基準化電力を絶対値化して、基準化電力の絶対値化の曲線と距離d1の軸とに囲まれた閉区間を抽出する(ステップ S175)。次に、面積算出部28は、前記抽出した閉区間の面積を算出する(ステップ S176)。次に、面積算出部28は、メモリ21から前のループまでに算出した面積の和を読み出し、当該前のループまでに算出した面積の和に、前記算出した面積を加算し、当該加算後の面積の和をメモリ21に保存する(ステップ S177)。面積算出部28が、全ての区間で算出した面積を前記面積の和に加算し終わると、本ループは終了する。
【0115】
前記算出した面積の和が所定の閾値よりも大きい場合(ステップ S178 YES)、検知処理部29は、検知した対象物を通常検知対象物と判定し(ステップ S179a)、通常検知対象物であるという情報を物標出力処理部30へ出力する。
一方、前記算出した面積の和が所定の閾値以下の場合(ステップ S178 NO)、検知した対象物を低背検知対象物と判定し(ステップ S179b)、低背検知対象物であるという情報を物標出力処理部30へ出力する。以上で、本フローチャートは終了する。
【0116】
本実施例では、距離の関数として受信電力を算出したが、これに限らず、時間の関数であってもよい。例えば、対象物が止まっている場合、時間が経つとともに、レーダと対象物との距離が縮まる。これにより、受信電力を時間の関数と表した場合に、低背検知対象物からの受信電力曲線を1つの境界として定まる領域の面積の和は、通常検知対象物からの受信電力曲線を1つの境界として定まる領域の面積の和よりも小さくなる。従って、検知処理部29は、当該面積の和の差によって、低背検知対象物であるか否かを判定することができる。
【0117】
本実施例では、電子走査型レーダ装置を用いて説明したが、これに限らず、機械操作式レーダ装置であってもよい。機械操作式レーダ装置を用いた時の受信電力の距離に対する変化は、電子走査型レーダ装置を用いた時の受信電力の距離に対する変化と、等価なものだからである。
【0118】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0119】
11、1n 受信アンテナ
21、2n ミキサ
3 送信アンテナ
4 分配器
51、5n フィルタ
6 SW
7 ADC
8 制御部
9 三角波生成部
10 VOC
20 信号処理部
21 メモリ
22 受信電力算出部
23 DBF処理部
24 距離検出部
25 速度検出部
26 方位検出部
27 物標引継ぎ処理部
28 面積算出部
29 検知処理部
30 物標出力処理部
【特許請求の範囲】
【請求項1】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部と、
前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部と、
所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記検知処理部は、前記距離が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
時間の関数として、前記受信された電波の電力を算出する受信電力算出部と、
所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、
を備えることを特徴とするレーダ装置。
【請求項4】
前記検知処理部は、前記時間が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出することを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記面積算出部は、前記曲線と所定の直線とを境界として定まる領域の面積または前記曲線と所定の曲線とを境界として定まる領域の面積を算出することを特徴とする請求項1から請求項4のいずれかに記載のレーダ装置。
【請求項6】
前記面積算出部は、前記曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出することを特徴とする請求項1から請求項5のいずれかに記載のレーダ装置。
【請求項7】
前記検知処理部は、前記面積の複数区間の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項6のいずれかに記載のレーダ装置。
【請求項8】
前記検知処理部は、複数区間の前記面積のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項7のいずれかに記載のレーダ装置。
【請求項9】
前記検知処理部は、前記面積が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項8のいずれかに記載のレーダ装置。
【請求項10】
受信アンテナにより受信された電波に基づいて前記対象物までの距離を検出する第1のステップと、
前記検出した距離の関数として、前記受信された電波の電力を算出する第2のステップと、
所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第3のステップと、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第4のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【請求項11】
時間の関数として、前記受信された電波の電力を算出する第1のステップと、
所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第2のステップと、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第3のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【請求項1】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
前記受信された電波に基づいて前記対象物までの距離を検出する距離検出部と、
前記検出した距離の関数として、前記受信された電波の電力を算出する受信電力算出部と、
所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記検知処理部は、前記距離が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
時間の関数として、前記受信された電波の電力を算出する受信電力算出部と、
所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する面積算出部と、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する検知処理部と、
を備えることを特徴とするレーダ装置。
【請求項4】
前記検知処理部は、前記時間が所定の範囲内にある場合にのみ、前記受信波の強度に基づいて前記面積を算出することを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記面積算出部は、前記曲線と所定の直線とを境界として定まる領域の面積または前記曲線と所定の曲線とを境界として定まる領域の面積を算出することを特徴とする請求項1から請求項4のいずれかに記載のレーダ装置。
【請求項6】
前記面積算出部は、前記曲線と前記受信された電波の電力の平均値に基づいて決まる直線とを境界として定まる領域の面積を算出することを特徴とする請求項1から請求項5のいずれかに記載のレーダ装置。
【請求項7】
前記検知処理部は、前記面積の複数区間の和が所定の閾値を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項6のいずれかに記載のレーダ装置。
【請求項8】
前記検知処理部は、複数区間の前記面積のいずれかが所定の閾値を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項7のいずれかに記載のレーダ装置。
【請求項9】
前記検知処理部は、前記面積が所定の閾値を超える回数が、予め設定した回数を超えると、前記対象物を通常検知対象物と判定することを特徴とする請求項1から請求項8のいずれかに記載のレーダ装置。
【請求項10】
受信アンテナにより受信された電波に基づいて前記対象物までの距離を検出する第1のステップと、
前記検出した距離の関数として、前記受信された電波の電力を算出する第2のステップと、
所定の距離区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第3のステップと、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第4のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【請求項11】
時間の関数として、前記受信された電波の電力を算出する第1のステップと、
所定の時間区間において、前記関数を表す曲線を1つの境界として定まる領域の面積を算出する第2のステップと、
前記算出した面積に基づいて前記対象物を低背検知対象物であるか否か判定する第3のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−191195(P2011−191195A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−57982(P2010−57982)
【出願日】平成22年3月15日(2010.3.15)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月15日(2010.3.15)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
[ Back to top ]