
レーダ装置及びコンピュータプログラム
【課題】アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別する。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
【解決手段】電波を送信する送信アンテナ3と、送信された電波が対象物により反射された電波を受信する受信アンテナ1nと、受信された電波を所定の時間間隔で取得する受信波取得部7と、受信波取得部7の取得回数の関数として、受信された電波の電力を算出する受信電力算出部22と、関数から複数の代表点を抽出する代表点抽出部28と、代表点に基づいて対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部29と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置およびコンピュータプログラムに関する。
【背景技術】
【0002】
従来、ミリ波レーダ(以下、レーダと称する)は、通常、自動車の車体前方に搭載され、車間警報、車速制御などに用いられている。車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが用いられている。
【0003】
レーダを搭載した自車の周囲に障害物が存在する場合、車載レーダは自車と障害物との相対的な距離、方位、速度などの情報を有した物標データを車間警報、車速制御システムに供給する。車間警報、車速制御システムは、その物標の位置情報に応じて、自車と障害物との距離を維持させたり、衝突が予想される場合には警報を発したり、自車を減速させたりするといった自車の制御(以下、衝突軽減制御と称する)を行う(例えば、特許文献1参照)。そのため、車載レーダは、自車両に衝突する危険性がある対象物を迅速にかつ正確に検知する性能が要求されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275840号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般車道において、高架橋、スノーシェルター、土石シェルター等、レーダの受信アンテナ光軸の高さより十分に高い位置に反射構造物(以下、上方構造物と称する)が存在する。これらの上方構造物は、保安規定から、車高よりも十分高い位置(具体的には、4.5m以上)に設置が義務付けられているため、車両の走行の妨げとはならない。
【0006】
しかしながら、従来のレーダ装置は、上方構造物を衝突危険対象物として誤検知するという問題があった。そうすると、衝突事故が物理的に発生しない安全な走行状況にも関わらず、車両制御機器は上記レーダ装置の誤検知により衝突の危険性がある状況であると判断してしまう。この誤検知が原因で、不要な警報の発信または不要な自車両の減速といった制御が行われ、運転者への不快をもたらしてしまう。
【0007】
上記問題に対して、アンテナの指向性制御を用いた手法が開発されているが、その導入にはアンテナの高性能化または高機能化が伴う。しかしながら、小型化、低コスト化が求められる車載用レーダにおいては、アンテナの指向性制御によって上方構造物の検知を完全に抑制するのは困難である。
【0008】
そこで本発明は、上記問題に鑑みてなされたものであり、アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別するレーダ装置及びコンピュータプログラムを提供することを課題とする。
【課題を解決するための手段】
【0009】
[1]上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、前記受信された電波を所定の時間間隔で取得する受信波取得部と、前記受信波取得部の取得回数の関数として、前記受信された電波の電力を算出する受信電力算出部と、前記関数から複数の代表点を抽出する代表点抽出部と、前記代表点に基づいて前記対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部と、を備えることを特徴とする。
上記レーダ装置によれば、適切な代表点を抽出することによりスパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0010】
[2]上記[1]記載のレーダ装置において、前記代表点抽出部は、前記関数の極値を取る点を抽出し、前記判定処理部は、前記極値に基づいて前記上方構造物であるか否か判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0011】
[3]上記[2]記載のレーダ装置において、前記判定処理部は、前記極値の数を計数し、前記極値の数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする。
これによれば、上方構造物の高さが高くなるほど極値の数が多くなる関係をもつことから、所定の閾値を適切に設定することにより、ロバストに対象物を上方構造物と判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0012】
[4]上記[3]に記載のレーダ装置において、極値の数と、前記対象物と前記受信アンテナの光軸との高さの差を関係づけて記憶する記憶部を更に備え、前記判定処理部は、前記記憶部から前記計数した極値の数に対応する前記高さの差を抽出することを特徴とする。
これによれば、計数した極値の数から対象物と受信アンテナの光軸との高さの差を抽出することができるので、上記高さの差から対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0013】
[5]上記[1]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、前記近似関数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、適切な近似関数を算出することにより、算出された近似関数の特性から対象物が上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0014】
[6]上記[5]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記1次関数の1次の係数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする。
これによれば、所定の閾値が適切に選択されることにより、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0015】
[7]上記[5]に記載のレーダ装置において、前記取得回数と前記代表点における電力の関係を1次関数で近似し、所定の前記取得回数における前記1次関数の値と前記受信された電波の電力または前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、1次関数の値と受信された電力との差と所定の閾値とを比較することにより、上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0016】
[8]上記[5]に記載のレーダ装置において、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記取得回数と前記代表点における電力の関係を2次以上の関数で近似し、所定の前記取得回数における前記1次関数の値と前記2次以上の関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、同距離における1次関数の値と2次以上の関数の値の差が大きくなるので、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。従って、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0017】
[9]上記[1]に記載のレーダ装置において、前記判定処理部は、予め決められた前記取得回数における前記代表点の電力に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、予め決められた取得回数(例えば、対象物との距離150[m]に相当する取得回数)を適切に決めることによって、その取得回数における代表点の電力に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0018】
[10]上記[9]に記載のレーダ装置において、前記判定処理部は、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記代表点の電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、予め決められた取得回数(例えば、対象物との距離150[m]に相当する取得回数)における代表点の電力と、所定の取得回数(例えば、対象物との距離100[m]に相当する取得回数)における代表点の電力との差に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0019】
[11]上記[9]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点の電力の関係を2次以上の関数で近似し、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記2次以上の関数の値とを算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、2次以上の近似式の値と初期値との差に基づいて、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0020】
[12]上記[1]に記載のレーダ装置において、前記判定処理部は、前記代表点における電力に基づいて前記対象物の反射断面積を算出し、前記反射断面積に基づいて、所定の前記取得回数における前記受信された電波の電力の推定値を算出し、前記推定値に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、電力の推定値を受信された電波の電力または代表点の電力と比較することにより、上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0021】
[13]上記[12]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、代表点の電力と電力の推定値との差に基づいて、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0022】
[14]上記[12]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、所定の取得回数における電力の推定値と近似関数の値との差に基づいて、ロバストに対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0023】
[15]上記[1]に記載のレーダ装置において、前記代表点抽出部は、所定の前記取得回数の範囲における前記受信された電波の電力から複数の代表点を抽出し、前記判定処理部は、前記所定の取得回数における前記複数の代表点に基づいて前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、所定の取得回数の範囲において取得回数に対する複数の代表点に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0024】
[16]上記[15]に記載のレーダ装置において、前記所定の取得回数において前記取得回数に対する前記複数の代表点の軌跡が下に凸であれば、前記対象物を前記上方構造物であると判定することを特徴とする。
これによれば、予め決められた取得回数における複数の代表点のうちで極小値を取る点があれば、対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0025】
[17]上記[15]に記載のレーダ装置において、前記所定の取得回数において前記複数の代表点を前記取得回数の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の極大値の変動およびレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れによる影響を受けずに、ロバストに対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0026】
[18]上記[15]に記載のレーダ装置において、前記判定処理部は、前記所定の取得回数に対する前記複数の代表点の電力を2次関数で近似し、前記2次関数が極小値または最小値を取る取得回数を算出し、前記極小値または前記最小値を取る取得回数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の極大値の変動およびレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れによる影響を受けずに、ロバストに対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0027】
[19]上記[18]に記載のレーダ装置において、前記取得回数と、前記対象物と前記受信アンテナの光軸との高さの差とを関係づけて記憶する記憶部を更に備え、前記判定処理部は、前記記憶部から前記極小値または前記最小値を取る取得回数に対応する前記高さの差を抽出することを特徴とする。
これによれば、記憶部から極小値を取る距離に対応する高さの差を抽出することができるので、その高さの差を用いて対象物の高さを算出することができる。これにより、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0028】
[20]上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、受信アンテナにより受信された電波を所定の時間間隔で取得を行う第1のステップと、前記取得の回数の関数として、前記受信された電波の電力を算出する第2のステップと、前記関数から複数の代表点を抽出する第3のステップと、前記代表点に基づいて前記対象物を前記受信アンテナの光軸より上方にある上方構造物であるか否か判定する第4のステップと、をコンピュータに実行させるためのコンピュータプログラムである。
上記コンピュータプログラムによれば、取得の回数に対する受信された電波の関数から、複数の代表点を抽出し、その複数の代表点に基づいて対象物を上方構造物であるか否か判定することができる。従って、適切な代表点を抽出することによりスパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【発明の効果】
【0029】
本発明によれば、アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別することができる。
【図面の簡単な説明】
【0030】
【図1】本発明の各実施形態で共通する電子走査型レーダ装置の構成例を示すブロック図である。
【図2】送信波及び受信波により、三角波の上昇領域及び下降領域におけるビート信号の生成を説明する概念図である。
【図3】複数本のアンテナの配列している面に対して垂直方向の軸に対する反射波の到来角度を算出する方法を示した図である。
【図4】物標抽出処理全体のフローチャートである。
【図5】数値シミュレーションに用いた車両と上方構造物の位置関係を示した模式図である。
【図6】上方構造物または光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。
【図7】対象物との距離に対する上方構造物の受信電力と、その極大点を表した図である。
【図8】極大点の抽出処理を示したフローチャートである。
【図9】対象物との距離に対する受信電力曲線上に表される受信電力の極大点と、それぞれの極大点の数を表した図である。
【図10】高低差に対する極大値の検出数を表した図である。
【図11】極大値の検出数Kと高低差Δhとが関係付けられたテーブルを説明するための図である。
【図12】極大点の検出数を用いた上方構造物判別処理を示したフローチャートである。
【図13】距離に対する受信電力曲線の極大値を繋いだ曲線とその極大値を繋いだ曲線の近似直線を示した図である。
【図14】1次近似直線の1次の係数と高低差との関係を示した図である。
【図15】1次近似直線の1次の係数を用いた上方構造物の判別処理を示したフローチャートである。
【図16】受信電力の極大値曲線と、その1次近似直線と、その3次近似曲線と、1次近似直線上の電力値と3次近似曲線上の電力値との差分の絶対値の和を表した図である。
【図17】1次近似式から算出された電力と3次近似式から算出された電力との差分の絶対値の和を用いた上方構造物の判別処理を示したフローチャートである。
【図18】受信電力の極大値曲線と、その初期電力値を表す直線と、その3次近似曲線と、初期電力値と3次近似曲線上の電力値との差分の絶対値の和を表した図である。
【図19】初期電力値と受信電力値の極大値との差分の和を、上方構造物と光軸上構造物とで比較した図である。
【図20】初期電力値と3次近似式から算出された電力との差分の和を用いた上方構造物の判別処理を示したフローチャートである。
【図21】予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。
【図22】予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を距離dzに対して示した図である。
【図23】予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を用いた上方構造物の判別処理を示したフローチャートである。
【図24】直接波成分の第1ヌル点を用いた上方向構造物の識別方法を説明するための図である。
【図25】距離に対する受信電力の極大値の変化に極小値が存在するか否かを判別することによる上方構造物の判別処理を示したフローチャートである。
【図26】高低差Δh毎に2次近似式により算出された極小値をとる距離と、高低差Δh毎に算出された第1ヌル点に対応する距離の理論値との比較を説明するための図である。
【図27】極小値を取る距離dlmと高低差Δhとが関係付けたテーブルである。
【図28】2次近似式により算出された極小値をとる距離を用いた上方構造物の判別処理を示したフローチャートである。
【発明を実施するための形態】
【0031】
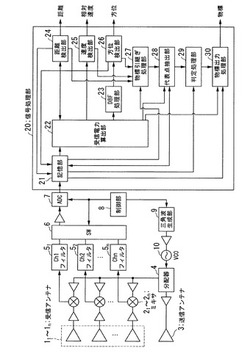
以下、本発明の本発明の各実施形態で共通する電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。図1は本発明の各実施形態で共通する電子走査型レーダ装置の構成例を示すブロック図である。
【0032】
同図において、本発明の各実施形態で共通する電子走査型レーダ装置1は、受信アンテナ11〜1nと、ミキサ21〜2nと、送信アンテナ3と、分配器4と、フィルタ51〜5n(nは正の整数)、SW(スイッチ)6と、ADC(A/Dコンバータ、受信波取得部)7と、制御部8と、三角波生成部9と、VCO(Voltage Controlled Oscillator)10と、信号処理部20とを用いて構成されている。
【0033】
上記信号処理部20は、記憶部21と、受信電力算出部22と、DBF検知部23と、距離検出部24と、速度検出部25と、方位確定部26と、物標引継ぎ処理部27と、代表点抽出部28と、判定処理部29と、物標出力処理部30とを用いて構成されている。
【0034】
次に、図1を参照して、本発明の各実施形態で共通する電子走査型レーダ装置の動作を説明する。
受信アンテナ11〜1nは、送信波が対象物にて反射し、この対象物から到来する反射波、すなわち受信波を受信する。
ミキサ21〜2n各々は、送信アンテナ3から送信される送信波と、各受信アンテナ11〜1nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
【0035】
上記送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO10において周波数変調した送信信号を対象物に対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、上記ミキサ21〜2nおよび送信アンテナ3に分配する。
【0036】
フィルタ51〜5n各々は、それぞれミキサ21〜2nにおいて生成された各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を供給する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ51〜5n各々を通過した各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(受信波取得部)7に供給する。
【0037】
ADC(受信波取得部)7は、上記SW6から上記サンプリング信号に同期して入力される各受信アンテナ11〜1n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期して所定のサンプリング周波数でA/D変換してデジタル信号に変換し、信号処理部20における記憶部21の波形記憶領域に順次記憶させる。換言すれば、ADC(受信波取得部)7は、ビート信号を所定の時間間隔で取得する。
【0038】
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図1に示す電子走査型レーダ装置全体の制御を行う。
信号処理部20内の記憶部21は、A/Dコンバータ7においてデジタル変換されたデジタル信号を各受信アンテナ11〜1nに対応したチャンネルごとに格納する。
【0039】
また、記憶部21は、自車両の地上からの高さと自車両が積載する荷物の地上からの高さとを保持する。また、記憶部21は、後述する極大値の検出数と高低差とを関係付けたテーブル100を保持する。また、記憶部21は、後述する第1ヌル点に対応する距離の理論値と高低差とを関係付けたテーブル270を保持する。
【0040】
<距離、相対速度、水平角度(方位)を検出する原理>
次に、図2を用いて、本発明の各実施形態で共通する信号処理部20において用いられる、電子走査型レーダ装置と対象物との距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
【0041】
図2は、図1の三角波生成部9において生成された信号をVCO10において、中心周波数f0、変調幅Δfで周波数変調した送信信号と、その送信信号が対象物に反射されて受信信号として入力される状態を示す。図2の例は対象物が1つの場合を示している。
【0042】
図2(a)に示すように、送信する信号に対し、対象物からの反射波である受信信号が、レーダと対象物との距離に応じて右方向(時間遅れ方向)に遅延されて受信される。さらに、ドップラー効果によって対象物との相対速度に応じて、送信信号に対して上下方向(周波数方向)に変動する。
【0043】
受信電力算出部22は、記憶部21に格納された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号(図2(a)の下図)に対して、フーリエ変換を行う。ここで、フーリエ変換後の複素数データの振幅を信号レベルと呼ぶこととする。
【0044】
受信電力算出部22は、何れかのアンテナにおける複素数データまたは、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値に対応するビート周波数、すなわち距離に依存した対象物の存在として検出することができる。ここで、全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0045】
フーリエ変換の結果、図2(b)に示されるように、対象物が1つの場合、上昇領域及び下降領域にそれぞれに1つのピーク値を有することなる。ここで、図8(b)は横軸が周波数、縦軸が信号強度となっている。
【0046】
そして、受信電力算出部22は、図2(b)に示すビート周波数毎の信号レベルから、予め設定された数値(閾値)を超える信号レベルを検出することによって、対象物が存在していることを判定する。ここで、信号レベルのピーク値を受信波の強度と称す。
【0047】
受信電力算出部22は、信号レベルのピークを検出した場合、ピーク値のビート周波数(ビート信号の上り部分及び下り部分の双方)を対象物周波数として距離検出部24、速度検出部25へ供給する。受信電力算出部22は、周波数変調幅Δfを距離検出部24へ供給し、中心周波数f0を速度検出部25へ供給する。
【0048】
また、受信電力算出部22は、所定のサイクルで信号レベルの下り部分のピーク値の二乗を受信電力として算出する。後述する距離検出部24から入力された対象物との距離の関数として、前記受信電力を代表点抽出部28へ供給する。
【0049】
受信電力算出部22は、信号レベルのピークを検出できなかった場合、物標候補がないという情報を物標出力処理部30に供給する。
なお、ビート信号の上り部分のピーク値、またはビート信号の上り部分のピーク値とビート信号の下り部分のピーク値の平均を信号レベルとして使用してもよい。
【0050】
複数の対象物が存在する場合、フーリエ変換後には、ビート信号の上り部分とビート信号の下り部分のそれぞれに対象物の数と同じ数のピークが表れる。レーダと対象物の距離に比例して、受信信号が遅延し、図2(a)の上段における受信信号は右方向にシフトするので、レーダと対象物との距離が離れるほど、図2(a)の下段におけるビート信号の周波数は大きくなる。
【0051】
複数の対象物に対応する信号レベルのピークが複数検出された場合には、上りの部分および下りの部分のピーク値ごとに、周波数が小さいものから順番に番号をつけて、判定処理部29へ供給する。ここで、上りおよび下りの部分において、同じ番号のピークは、同じ対象物に対応しており、それぞれの識別番号を対象物の番号とする。
【0052】
次に、距離検出部24は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により距離rを算出する。距離検出部24は、算出された対象物との距離を受信電力算出部22と、物標引継ぎ処理部27とへ供給する。また、距離検出部24は、その対象物との距離を記憶部21へ保存する。
r={C・T/(2・Δf)}・{(fu+fd)/2}
【0053】
また、速度検出部25は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により相対速度vを算出し、物標引継ぎ処理部27へ供給する。
v={C/(2・f0)}・{(fu−fd)/2}
【0054】
上記距離r及び相対速度vを算出する式において、Cは光速度、Tは変調時間(上昇部分/下降部分)、fuは上昇部分における対象物周波数、fdは下降部分における対象物周波数である。
【0055】
次に、本発明の各実施形態で共通する受信アンテナ11〜1nは、図1に示すように、間隔dにより配置されたアレー状のアンテナである。上記受信アンテナ11〜1nには、アンテナの配列している面に対する垂直方向の軸との角度φ方向から入射される、対象物からの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対する対象物からの反射波)が入力する。
【0056】
このとき、上記到来波は、上記受信アンテナ11〜1nにおいて同一角度φにて受信される。端ともう1端の受信アンテナ間にて発生する受信信号の位相差は、受信信号の周波数f、端ともう1端の受信アンテナ間の間隔dn−1および角度φから、位相差は、2πf・(dn−1・sinφ/C)で算出される。
【0057】
上記位相差を利用して、DBF(デジタルビームフォーミング)処理部23は、入力される各アンテナに対応した時間軸でフーリエ変換された複素データを、アンテナの配列方向にさらにフーリエ変換し、すなわち空間軸フーリエ変換を行う。そして、DBF処理部23は、角度分解能に対応した角度チャネル毎のスペクトルの強度を示す空間複素数データを算出し、ビート周波数毎に方位検出部26に供給する。
【0058】
方位検出部26は、算出されたビート周波数毎の空間複素数データの値の大きさのうち、一番大きな値を取る角度φを対象物の方位として物標引継ぎ処理部27に供給する。また、方位検出部26は、その対象物の方位を記憶部21に保存する。
【0059】
物標引継ぎ処理部27は、現在のサイクルで算出した対象物の距離、相対速度、方位の値と、記憶部21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定する。
【0060】
その場合、物標引継ぎ処理部27は、記憶部21から読み出したその対象物の物標引継ぎ処理回数を1増やす。そうでない場合には、物標引継ぎ処理部27は、新しい対象物を検知したとみなす。また、物標引継ぎ処理部27は今回の対象物の距離、相対速度、方位およびその対象物の物標引継ぎ処理回数を記憶部21に保存する。また、物標引継ぎ処理部27は、代表点抽出部28へ対象物の識別番号を供給する。
【0061】
代表点抽出部28は、受信電力算出部22から供給された対象物との距離の関数である受信電力を受け取る。そして、代表点抽出部28は、対象物との距離の関数である受信電力の極大値を代表値として抽出する。そして、代表点抽出部28は、受信電力の極値を対象物との距離の関数として算出する。代表点抽出部28は、算出した対象物との距離の関数である受信電力の極値を判定処理部29に供給する。
【0062】
なお、代表点抽出部28は、極大値を代表値として抽出したがこれに限らず、極小値を代表値として抽出してもよい。また、代表点抽出部28は、所定の距離区間内の平均値または中央値を代表値として抽出してもよい。また、代表点抽出部28は、隣合う極大値と極小値との平均値または中央値を代表値として抽出してもよい。
【0063】
判定処理部29は、代表点抽出部28から供給された対象物との距離の関数である受信電力の極値を受け取る。そして、判定処理部29は、後述する上方構造物の判別アルゴリズムを用いて、対象物が衝突の危険性が伴う通常検知対象物であるか走行に支障をきたさない上方構造物であるかを判別し、その判別結果の情報を物標出力処理部30に供給する。
【0064】
物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として供給する。物標出力処理部30は、判定処理部29から供給された複数の対象物の判別結果の情報を受け取り、そのどちらもが通常検知対象物である場合、記憶部21からそれぞれの対象物の方位を読み出す。物標出力処理部30は、それぞれの対象物の方位から、自車の車線上にある対象物を抽出し、自車の車線上にある対象物の識別番号を物標として不図示の外部装置に供給する。
【0065】
これによって、その外部装置は、対象物が衝突の危険性を伴う通常検知対象物である場合に、衝突を回避するために減速するか、または運転手に注意を促すために警報を発することができる。
【0066】
また、物標出力処理部30は、複数の対象物の判別結果の情報を受け取り、そのどちらもが通常検知対象物である場合であって、2つ以上の対象物が自車の車線上にある場合、記憶部21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として供給する。なお、物標出力処理部30は、対象物が低背検知対象物である場合、または受信電力算出部22から物標候補がないという情報が入力された場合には、物標なしという情報を供給する。
【0067】
次に、物標抽出全体の処理の流れについて、図4のフローチャートを参照して説明する。図4は、物標抽出処理全体のフローチャートである。信号処理部20は、AD変換された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号を記憶部21に格納する(ステップS101)。
【0068】
次に、受信電力算出部22は、各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をフーリエ変換し、信号レベルを算出する(ステップS102)。
受信電力算出部22は、アンテナ毎に時間方向にフーリエ変換した値をDBF処理部23へ供給する。
【0069】
また、受信電力算出部22は、周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数を距離検出部24へ供給する。
また、受信電力算出部22は、中心周波数f0、上昇部分の対象物周波数および下降部分の対象物周波数を速度検出部25へ供給する。
【0070】
また、受信電力算出部22は、信号レベルの下り部分のピーク値を判定処理部29へ供給する。
また、受信電力算出部22は、受信波の強度を検出できなかった場合、物標候補がないことを物標出力処理部30に供給する。
【0071】
次に、DBF処理部23は、受信電力算出部22から入力されたアンテナ毎に時間方向にフーリエ変換した値を、アンテナの配列方向にさらにフーリエ変換を行い、角度分解能に対応した角度チャネル毎の空間複素数を計算し、ビート周波数毎に方位検出部26へ供給する(ステップS103)。
【0072】
次に、距離検出部24は、受信電力算出部22から入力される周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数から、距離を算出する(ステップS104)。また、速度検出部25は、受信電力算出部22から入力される中心周波数、上昇部分の対象物周波数および下降部分の対象物周波数から、相対速度を算出する(ステップS104)。
【0073】
方位検出部26は、算出されたビート周波数毎の空間複素数のうち、一番振幅が大きな値を取る角度を、対象物が存在する方位として物標引継ぎ処理部27に供給する(ステップS105)。
【0074】
次に、物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、記憶部21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定し、記憶部内の対象物の距離、相対速度、方位の値を更新し、判定処理部29へ対象物の識別番号を供給する(ステップS106)。
【0075】
次に、判定処理部29は、物標引継ぎ処理部27から入力された対象物が上方構造物かどうか判定し、対象物が上方構造物であるか前方構造物であるかの情報を物標出力処理部30へ供給する(ステップS107)。
【0076】
次に、物標出力処理部30は、対象物が前方構造物である場合に、その対象物の識別番号を物標として供給する(ステップS108)。物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが前方構造物である場合、自車の車線上にある対象物の識別番号を物標として供給する。また、物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが前方構造物の場合であって、2つ以上の対象物が自車の車線上にある場合、記憶部21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として供給する。
【0077】
<上方構造物の判別アルゴリズム>
次に、判定処理部29における、上方構造物の判別アルゴリズムを説明する。通常、電磁波が強く反射される構造物の条件として、十分に広い反射断面積を有すること、反射損失の少ない物体(あるいは導体)であること、反射面が平坦(つまり、反射以外の散乱が少ない)であること、反射面がアンテナの光軸に対して垂直を成すことあるいは反射面がコーナーリフレクタ構造を有すること、等が挙げられる。
【0078】
これらの条件を考慮して、実際の道路環境を想定すると、高架橋、スノーシェルター、土石シェルター等の構造物が適合する。特に、高架橋の1つである鋼製脚橋は車両の反射断面積よりも十分に広くかつ平面である。また、鋼製脚橋は素材も完全金属体で、さらにコーナーリフレクタ構造を有している。従って、アンテナの光軸上に存在する構造物(以下、光軸上構造物と称する)の1つである前方車両よりもはるかに大きな反射電力レベルP(dz)が観測される場合がある(dzは対象物との水平距離を表す)。
【0079】
図5は、数値シミュレーションに用いた車両と上方構造物の位置関係を示した模式図である。同図において、車両41は、レーダ装置を備えている。h1は、そのレーダ装置のアンテナ光軸の高さである。h2は、対象物42の反射点の高さである。h3は、車両41の車高である。r1は、車両41と上方構造物42との直接距離である。
【0080】
r2は、電波が車両41と上方構造物42との間を間接伝搬するときに、電波が車両と路面との間を進む距離である。r3は、電波が車両41と上方構造物42との間を間接伝搬するときに、電波が路面と上方構造物との間を進む距離である。r4(=r2+r3)は、間接伝搬時の伝搬距離である。
dzは、車両41と上方構造物42との水平距離である。θ1は、間接伝搬の際に、路面と送信電波とが成す角度、または路面と受信電波とが成す角度である。
【0081】
図6は、上方構造物または光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。横軸は図5におけるz軸(アンテナ光軸)方向の距離dz(自車両と検知対象物との水平距離)である。縦軸は、受信電力P(dz)である。本計算におけるアンテナ条件は、メインローブの半値幅が4[deg]、メインローブとサイドローブの受信電力の比が35[dB]である。
【0082】
まず、上方構造物を想定したシミュレーションにより推定された受信電力について説明する。レーダ装置のアンテナ光軸の高さh1と対象物の反射点の高さh2との高低差Δh(=h2−h1)は4.15[m]である。ここで、レーダの設置高は1[m]である。また、上方構造物は高架橋の鉄骨部材を想定して、RCS(Rader Cross Section)は30[dB]である。この値は、後述する前方を走行する車両よりも十分にRCSが広いことを意味する。
【0083】
図6(a)は、上方構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。図6(a)において、シミュレーションにより推定された受信電力曲線51aは、送信波と受信波との位相差を考慮した受信電力の距離に対する関係を表している。受信電力曲線51aは、対象物との距離dzが200[m]より近くなると、検知閾値52aを超える点を有する。また、自由空間伝搬曲線53aは、空間減衰を考慮した場合の理論上の受信電力の距離に対する関係を表している。
【0084】
続いて、光軸上構造物を想定したシミュレーションにより推定された受信電力について説明する。高低差Δh(=h2−h1)は0[m]である。ここで、構造物h2の高さと、レーダの設置高h1はともに1[m]である。また、光軸上構造物は、前方を走行する車両を想定して、RCS(Rader Cross Section、レーダ断面積)は0[dB]である。ここで、RCSとは、レーダの入射方向とレーダの反射する方向が180度反転する場合において、物体が電磁波を散乱する度合いを表す量である。
【0085】
図6(b)は、光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。図6(b)において、シミュレーションにより推定された受信電力曲線51bは、送信波と受信波の位相を考慮した受信電力の距離に対する関係を表している。受信電力曲線51bは、対象物との距離dzが160[m]より狭まると、検知閾値52bを超える点を有する。また、自由空間伝搬曲線53bは、空間減衰を考慮した場合の理論上の受信電力の距離に対する関係を表している。
【0086】
ここで、図6(a)の受信電力曲線51aと図6(b)の受信電力曲線51bとを比べる。距離dzが80[m]以上の範囲において、上方構造物のRCSが大きいために、受信電力曲線51aが検知閾値52aをほとんどの部分で超えている。それに対し、光軸上構造物は、RCSが上方構造物のRCSよりも小さいために、受信電力曲線51bが、検知閾値52bを超える部分は、半分程度である。
【0087】
従って、レーダ装置は、対象物との距離に寄らず、上方構造物を検出してしまう。受信電力の大きさだけでは、対象物が上方構造物か光軸上構造物か判定することは困難である。
受信電力の軌跡には、図6で示したように複数の要素が含まれている。さらに、実際にレーダ装置を使用する環境では、マルチパスフェージングによる外来ノイズや回路の内部ノイズ等もランダムに加算されるため、非常に複雑な非線形関数として観測される。レーダは、このような複雑な軌跡から識別に用いられるいくつかの特徴を素早くかつ正確に抽出する必要がある。
【0088】
そこで、判定処理部29は、以下に示す方法のいずれかの方法を用いて、上方構造物を判別する。
<第1の実施形態>
初めに、第1の実施形態における上方構造物の判別方法を説明する。図7は、対象物との距離に対する上方構造物の受信電力と、その極大点を表した図である。同図において、受信電力曲線71の極大点72が、白丸で表示されている。
【0089】
判定処理部29は、電波の伝搬特性を受信電力曲線に対して、距離毎に前後にサンプルした受信電力を比較し、極大点を抽出する。具体的には、判定処理部29は、P(dz,n−1)<P(dz,n)かつP(dz,n+1)<P(dz,n)となる受信電力P(dz,n)を抽出する。ここで、nは受信電力を算出した距離のインデックスを表す正の整数である。
【0090】
極大点の抽出は、以下の3つの理由で、電波伝搬特性を把握する上で有効な手段である。まず1つ目の理由は、極大値は、距離が離れていても、検出閾値を超える値を取るので、出来る限り、遠方から解析処理を開始できることである。
【0091】
2つ目の理由は、対象物が所定の距離にあるときに、その距離付近で取り得る受信電力のうち一番大きい受信電力を取得することができるので、SN(Signal to Noise)比を上げることができることである。これにより、ノイズとなる干渉波による影響を受けにくい。
3つ目の理由は、受信電力を安定して観測できるため、電波伝搬特性が計測器の性能に大きく依存しない点である。
【0092】
次に、代表点抽出部28が、受信電力算出部22が受信電力を算出するサイクルと同じサイクルで、極大点を抽出する手順について説明する。図8は、極大点の抽出処理を示したフローチャートである。まず、代表点抽出部28は、n(nは2以上の正の整数)を2に初期化する(ステップ S202)。次に、代表点抽出部28は、現在のサイクルよりも2つ前の受信電力P(dz,n−1)と、現在のサイクルよりも1つ前のP(dz,n)と、現在の受信電力P(dz,n+1)と、を読み出す(ステップ S202)。ここで、dz,nは、n番目にサンプルした受信電力に対応する距離を表し、nが大きくなるほどその値dz,nは小さくなる。
【0093】
次に、代表点抽出部28は、P(dz,n−1)とP(dz,n)とを比較する(ステップS203)。P(dz,n−1)がP(dz,n)以上の場合(ステップS203 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、P(dz,n−1)がP(dz,n)より小さい場合(ステップS203 YES)、代表点抽出部28は、P(dz,n+1)とP(dz,n)とを比較する(ステップS204)。
【0094】
P(dz,n+1)がP(dz,n)以上の場合(ステップS204 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、P(dz,n+1)がP(dz,n)より小さい場合(ステップS204 YES)、代表点抽出部28は、P(dz,n)を極大値として抽出する(ステップS206)。
【0095】
次に、代表点抽出部28は、全てのnで調べていない場合(ステップS207 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、代表点抽出部28は、全てのnで調べた場合、極大点の抽出処理を終了する。以上で、本フローチャートは終了する。
【0096】
なお、代表点抽出部28は、極大値ではなく、極小値を抽出してもよい。これによって、距離に対する受信電力曲線は、極大値付近に比べて極小値付近で鋭いピークを有するので、極小値を取る距離をより正確に検出することができる。
その場合、代表点抽出部28は、P(dz,n−1)>P(dz,n)かつP(dz,n+1)>P(dz,n)となる受信電力P(dz,n)を抽出すればよい。
【0097】
続いて、極大値の数を例示するために、光軸上構造物と、上方構造物の高低差を規定し直す。一般的なレーダ設置高から、h1は1[m]である。光軸上構造物の場合、高低差Δhは0[m]である。
一般的に、車両の安全走行が確保された高さは路面から4.5[m]以上である。従って、上方構造物の高さがその高さの最小値である4.5[m]と設定されるので、高低差Δhは3.5[m]である。以上の条件で、それぞれの構造物に対して、受信電力の極大点と、それぞれの極大点の数を算出した例が、図8に示される。
【0098】
図9は、対象物との距離に対する受信電力曲線上に表される受信電力の極大点と、それぞれの極大点の数を表した図である。同図において、光軸上構造物の受信電力曲線81の極大値が白丸で示されている。また、上方構造物の受信電力曲線82の極大値が白丸で示されている。
【0099】
極大点の検出数Kは、光軸上構造物よりも上方構造物の方が多い。ここで、極大値の検出数Kは、距離に対する受信電力が1回振動する毎に1回検出されるので、受信電力の振動数の値は、極大値の検出数Kの値と同一である。従って、極大点の検出数Kは、光軸上構造物よりも上方構造物の方が多いということは、受信電力の振動数が光軸上構造物よりも上方構造物の方が多いことを意味する。
【0100】
図10は、高低差に対する極大値の検出数を表した図である。シミュレーションによって算出された極大値の検出数曲線91から、高低差Δhに対して、極大点の検出数が線形に増加している。すなわち、上方構造物の高さが高くなるほど、極大点の検出数が多くなる関係がある。極大値の検出数曲線91は、線形近似線92によって、線形近似することができる。
【0101】
高低差Δhが3.5[m]の直線93が、極大値の検出数曲線91と交わる点より、高低差Δhが3.5[m]の場合の極大点の検出数K(Δh=3.5)は26である。また、高低差Δhが0[m]の場合の極大点の検出数K(Δh=0)は5である。従って、K(Δh=3.5)−K(Δh=0)≧20である。
【0102】
図11は、極大値の検出数Kと高低差Δhとが関係付けられたテーブルを説明するための図である。同図において、テーブル100は、図9における線形近似線92から、抽出された極大値の検出数Kと高低差Δhとの組み合わせを保持する。これによって、テーブル100は、極大値の検出数Kと高低差Δhとが1対1に関係付ける。
【0103】
記憶部21は、予め極大値の検出数Kと高低差Δhとが関係付けられたテーブル100を保持する。判定処理部29は、対象物の高さh2を推定するために、記憶部21に格納されたテーブル100から極大値の検出数Kに対応する高低差Δhを抽出する。
あるいは、記憶部21は、線形近似線92の式の係数を保持する。判定処理部29は、対象物の高さh2を推定するために、その式の係数を読み出す。そして、判定処理部29は、線形近似線92の式に極大値の検出数Kを代入することによって、高低差Δhを算出する。
【0104】
図12は、極大点の検出数を用いた上方構造物判別処理を示したフローチャートである。また、図12は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS301)。次に、判定処理部29は、その抽出した極大点の検出数Kを算出する(ステップS302)。極大点の検出数Kが所定の閾値Kth以下の場合(ステップS303 NO)、判定処理部29は、対象物を光軸上構造物と判定する。
【0105】
一方、極大点の検出数Kが所定の閾値Kthより大きい場合(ステップS303 YES)、判定処理部29は、対象物を上方構造物と判定する。次に、判定処理部29は、記憶部21に保持されたテーブル100を読み出し、極大点の検出数Kから高低差Δhを抽出する(ステップS306)。次に、判定処理部29は、抽出した高低差Δhにレーダ装置のアンテナ光軸の高さh1を加算して、対象物の高さを算出する(ステップS307)。
【0106】
次に、判定処理部29は、対象物の高さを算出した後に、レーダ装置を搭載した自車両が対象物(例えば、信号機または鉄道高架橋等)に衝突するか否か判定する(ステップS308)。判定処理部29は、記憶部21から予め保存されている自車両の地上からの高さを読み出す。
【0107】
そして、判定処理部29は、読み出した自車両の地上からの高さが算出された対象物の高さ以上の場合(ステップS308 YES)、不図示のスピーカから警報を鳴らすよう制御する(ステップS309)。一方、読み出した自車両の地上からの高さが算出された対象物の高さより低い場合(ステップS308 NO)、判定処理部29は、処理を終了する。以上で、本フローチャートは終了する。
【0108】
以上により、判定処理部29は、対象物の高さと自車両との高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、判定処理部29は、レーダ装置を搭載した車両の運転者に対して、予め対象物と自車両との衝突の危険性を知らせることができる。
【0109】
なお、本フローチャートでは、対象物を上方構造物と判定した場合に、テーブル100から高低差を抽出して、その対象物の高さを推定したが、これに限らず、線形近似線92の式から高低差を算出して、その対象物の高さを推定してもよい。
【0110】
また、本フローチャートでは、対象物を上方構造物と判定した場合に、その対象物の高さを推定したが、これに限らず、対象物を光軸上構造物と判定した場合に、その対象物の高さを推定してもよい。これにより、対象物の高さから、その対象物である車両の種類を推定することができる。
【0111】
また、本フローチャートでは、判定処理部29は、記憶部21から読み出した自車両の地上からの高さが対象物の高さ以上の場合、警報を鳴らすよう制御したが、これに限定するものではない。自車両が積載する荷物の地上からの高さが、自車両の地上からの高さより高い場合には、判定処理部29は、記憶部21から自車両が積載する荷物の地上からの高さを読み出し、自車両が積載する荷物の地上からの高さが対象物の高さ以上の場合、警報を鳴らすよう制御してもよい。
【0112】
また、判定処理部29は、ステップS304において対象物を光軸上構造物と判定した後に、対象物の車種を推定してもよい。具体的には、例えば、判定処理部29が、ステップS306とステップS307と同一の方法で対象物の高さを推定する。そして、判定処理部29は、記憶部21から自車両の地上からの高さを読み出す。
【0113】
そして、判定処理部29は、対象物の高さh2の推定値が2[m]より大きい場合、判定処理部29は、対象物を普通トラックと判定する。一方、対象物の高さh2の推定値が2[m]以下の場合、判定処理部29は、対象物を乗用車と判定する。
【0114】
以上、第1の実施形態によれば、上方構造物の高さが高くなるほど極値の数が多くなる関係をもつことから、上方構造物の高さが高くなるほど、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに対象物を上方構造物と判定することができる。
【0115】
また、計数した極値の数から対象物と受信アンテナの光軸との高さの差を抽出することができるので、上記高さの差から対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0116】
<第2の実施形態>
続いて、第2の実施形態における上方構造物の判別方法を説明する。判定処理部29は、以下に示す第2の実施形態の方法で上方構造物を判別する。図13は、距離に対する受信電力曲線の極大値を繋いだ曲線(以下、極大値曲線と称する)とその極大値曲線の近似直線を示した図である。
【0117】
図13(a)は、図6(a)で例示された上方構造物における距離に対する受信電力の関係を表した曲線の極大値曲線とその極大値曲線の近似直線を示した図である。同図における距離に対する受信電力曲線の極大値曲線131aは、高低差Δhが5.15[m]の上方構造物が存在すると仮定した場合に算出された受信電力から、上記の方法で算出されたものである。
【0118】
1次近似直線132aは、距離に対する受信電力曲線の極大値曲線131aの1次近似直線である。
【0119】
ここで、上記近似直線または上記近似曲線の算出範囲は、距離dzが150[m]から直接波が第1ヌル点になる点135aの距離dnullまでである。第1ヌル点とは、アンテナのメインローブと第1サイドローブとの間の狭間でアンテナの受信感度が0になる仰角である。第1ヌル点は、アンテナの指向性パターンにより決定される点である。
【0120】
図13(b)は、光軸上構造物における距離に対する受信電力の関係を表した曲線の極大値曲線とその極大値曲線の近似直線を示した図である。同図における受信電力の極大値曲線131bは、高低差Δhが0[m]の光軸上構造物が存在すると仮定した場合に算出された受信電力から、上記の方法で算出されたものである。
【0121】
1次近似直線132bは、受信電力の極大値曲線131bの1次近似直線である
ここで、上記近似直線または上記近似曲線の算出範囲は、距離dzが150[m]から第1ヌル点135aの距離dnullまでである。
【0122】
図14は、1次近似直線の1次の係数と高低差との関係を示した図である。折れ線141は、1次近似直線を200[m]の距離から算出した場合における一次近似直線の1次の係数と高低差との関係である。折れ線141は、1次近似直線を150[m]の距離から算出した場合における一次近似直線の1次の係数と高低差との関係である。
【0123】
いずれの折れ線でも、高低差Δhが約2[m]から1次の係数(傾き)αの符号が正に反転している。従って、上方構造物における高低差Δhが3.5[m]以上では、1次の係数(傾き)αの符号は正である。従って、一次近似直線の1次の係数(傾き)αの符号は、上方構造物の判別に利用できる。
【0124】
図15は、1次近似直線の1次の係数を用いた上方構造物の判別処理を示したフローチャートである。また、図15は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS401)。次に、判定処理部29は、その極大点と距離との関係を近似した1次近似式を算出する(ステップS402)。
【0125】
1次の係数αが0よりも大きい場合(ステップS403 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS404)。
一方、1次の係数αが0以下の場合(ステップS403 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS404)。以上で、本フローチャートは終了する。
【0126】
以上、第2の実施形態によれば、距離に対する受信電力の極値を1次関数で近似できるため、1次関数の1次の係数が所定の閾値よりも大きい場合に、対象物を上方構造物と判定することができる。従って、所定の閾値が適切に決定されることにより、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに上方構造物であるか否か判定することができる。
【0127】
<第3の実施形態>
続いて、第3の実施形態における上方構造物の判別方法を説明する。図16は、距離に対する受信電力の極大値曲線と、距離に対する受信電力の1次近似直線と、距離に対する受信電力の3次近似曲線と、各距離における1次近似直線上の電力値と3次近似曲線上の電力値との差分の絶対値を距離が狭まるに連れて加算した値(差分の絶対値の和)Σ|ΔP1(dz)|を距離に対して繋げた曲線とを表した図である。同図において、左側の縦軸は、受信電力の極大値曲線、1次近似直線、および3次近似曲線の受信電力[dBi]を示している。一方、右側の縦軸は差分の絶対値の和Σ|ΔP1(dz)|[dB]を示している。
【0128】
図16(a)は、高低差Δhが4.15[m]の上方構造物において、距離に対する受信電力の極大値曲線161aと、距離に対する受信電力の1次近似直線162aと、距離に対する受信電力の3次近似曲線163aと、各距離における1次近似直線162a上の電力値と3次近似曲線163a上の電力値との差分の絶対値を距離が狭まるに連れて加算した値(差分の絶対値の和)を距離に対して繋げた曲線164aとを表した図である。同図において、距離dzが狭まるにつれて、左肩上がりに差分の絶対値の和164aが大きくなっている。
【0129】
図16(b)は、高低差Δhが0[m]の光軸上構造物において、距離に対する受信電力の極大値曲線161bと、距離に対する受信電力の1次近似直線162bと、距離に対する受信電力の3次近似曲線163bと、各距離における1次近似直線162b上の電力値と3次近似曲線163b上の電力値との差分を距離が狭まるに連れて加算した値(差分の絶対値の和)を距離に対して繋げた曲線164bとを表した図である。同図における差分の絶対値の和164bは、距離dzが狭まっても、上記差分の絶対値の和164aほど大きくはならない。
【0130】
図16(a)で示すように上方構造物の距離150[m]から距離dnullまでの区域では、アンテナ指向性の影響を受けるために、3次関数がその受信電力の極大値曲線に良くフィットする。一方、上記区域における光軸上構造物の受信電力の極大値曲線は、概ね線形関数として扱えるので、1次近似関数がその受信電力の極大値曲線に良くフィットする。
【0131】
以上の特性より、1次近似直線が、光軸上構造物の受信電力の極大値曲線に良くフィットし、1次近似直線が、上方構造物の受信電力の極大値曲線にフィットしないという関係がある。この関係を利用して、判定処理部29は、上方構造物を識別する。
具体的には、判定処理部29は、ある距離において、1次近似式から算出される電力と2次以上の近似式から算出される電力との差ΔP(dz)を用いて、上方構造物を識別する。
【0132】
なお、判定処理部29は、ある距離において、1次近似式から算出される電力と受信電力の極大値曲線から抽出される電力との差を用いて、上方構造物を識別してもよい。
【0133】
ΔP(dz)を用いた識別方法として、その処理に掛かる時間が短いものから順に、以下の3つの方法がある。(1)ΔP(dz)と所定の閾値を超えた場合に上方構造物と判定する方法と、(2)距離毎にΔP(dz)が所定の閾値を超えたか判定し、ΔP(dz)が所定の閾値を超えた回数が所定のカウント閾値を越えた場合に上方構造物と判定する方法と、(3)一次近似式と2次以上の近似式または受信電力の極大値曲線とに囲まれた区間の面積を算出し、算出した面積が所定の面積閾値を超えた場合に、上方構造物と判定する方法とがある。
ここで、上方構造物判別の処理の早さと信頼性とは、トレードオフの関係となる。以下、上記の順番で、具体的に説明する。
【0134】
第1の方法において、判定処理部29は、1次近似式を用いて、予め決められた距離における電力P1を算出する。そして、判定処理部29は、2次以上の近似式または受信電力の極大値曲線を用いて、その同じ距離における電力P3を算出する。そして、判定処理部29は、P1とP3との差ΔPまたはその差ΔPの絶対値を算出する。そして、判定処理部29は、算出されたΔPまたはΔPの絶対値が、所定の閾値を超えた場合に、上方構造物と判定する。
【0135】
第2の方法において、判定処理部29は、予め決められた距離dz毎に、1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差ΔP(dz)またはその差ΔP(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔP(dz)またはその差ΔP(dz)の絶対値が所定の閾値を超える回数を計数する。判定処理部29は、計数した回数が所定のカウント閾値を超えた場合に、上方構造物と判定する。
【0136】
第3の方法において、判定処理部29は、予め決められた距離dz毎に、1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差ΔP(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔP(dz)の和ΣΔP(dz)または差ΔP(dz)の絶対値の和Σ|ΔP(dz)|を算出する。判定処理部29は、算出した和ΣΔP(dz)または和Σ|ΔP(dz)|が所定の和閾値を超えた場合に、上方構造物と判定する。
【0137】
続いて、第3の方法で算出した和ΣΔP(dz)について説明する。判定処理部29は、和ΣΔP(dz)が所定の閾値を超えれば、対象物を上方構造物と判定する。一方、判定処理部29は、和ΣΔP(dz)が所定の閾値以下であれば、対象物を光軸上構造物と判定する。
【0138】
ここで、所定の閾値は、上方構造物として識別する際に最低必要となる高低差Δhと、アンテナ感度の仰角パターンとを用いて決定される。ここで、高低差Δhは、レーダ装置のアンテナ光軸の高さh1と、上方構造物の高さh2とから決定される。従って、所定の閾値は、レーダ装置のアンテナ光軸の高さh1と、上方構造物として識別する際に最低必要となる上方構造物の高さと、アンテナ感度の仰角パターンとを用いて決定される。
【0139】
図17は、1次近似式から算出された電力と3次近似式から算出された電力との差分の絶対値の和を用いた上方構造物の判別処理を示したフローチャートである。また、図17は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS501)。次に、判定処理部29は、その極大点と距離との関係を近似した1次近似直線を算出する(ステップS502)。
【0140】
次に、判定処理部29は、その極大点と距離との関係を近似した3次近似曲線を算出する(ステップS503)。次に、判定処理部29は、予め決められた距離dz毎に、その1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、その3次近似式を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差の絶対値|ΔP(dz)|を算出する(ステップS504)。
【0141】
差の絶対値|ΔP(dz)|が所定の閾値Pthを超えた場合(ステップS506 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS507)。
一方、差の絶対値|ΔP(dz)|が所定の閾値Pth以下の場合(ステップS506 NO)、判定処理部29は、対象物を上方構造物と判定する(ステップS508)。以上で、本フローチャートは終了する。
【0142】
以上、第3の実施形態によれば、上方構造物における距離に対する受信電力の極値は1次関数よりも2次以上の関数で良く近似できるため、同距離における1次関数の値と2次以上の関数の値の差が大きくなる。これによって、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0143】
なお、第3の実施形態において、同距離における1次関数の値と2次以上の関数の値の差に基づいて、上方構造物であるか否か判定したが、これに限らず、同距離における1次関数の値と受信された電波の電力または代表点の1つである極大値における電力との差に基づいて、上方構造物であるか否か判定してもよい。
【0144】
<第4の実施形態>
続いて、第4の実施形態における上方構造物の判別方法を説明する。前述したように、一例として対象物に対する距離150[m]付近の受信電力の極大値(以下、初期電力値と称する)から、第1ヌル点または距離40[m]に至るまでの受信電力P(dz)曲線を、光軸上構造物と、上方構造物とで比較する。
【0145】
図18は、距離に対する受信電力の極大値曲線と、その初期電力値を距離に対して繋げた直線と、距離に対する受信電力の極大値の3次近似曲線と、各距離における3次近似曲線上の電力値からその初期電力値を引いた値(差分)ΔP2(dz)を距離に対して繋げた曲線とを表した図である。同図において、左側の縦軸は、受信電力の極大値曲線、初期電力値、および3次近似曲線の受信電力[dBi]を示している。一方、右側の縦軸は、上記差分ΔP2(dz)[dB]を示している。
【0146】
図18(a)は、高低差Δhが4.15[m]の上方構造物の場合における距離に対する受信電力の極大値曲線181aと、その初期電力値を距離に対して繋げた直線182aと、距離に対する受信電力の極大値の3次近似曲線183aと、各距離における3次近似曲線上の電力値からその初期電力値を引いた値を距離に対して繋げた曲線184aとを表した図である。
【0147】
同図において、上方構造物の受信電力P(dz)曲線181aは、距離dzが狭まるに連れて、高次関数で減衰する。すなわちその曲線181aは、左肩下がりである。
曲線184aは、初期電力値から3次近似曲線183a上の電力値を引いた値を、距離dzが狭まるごとに積算したものである。
【0148】
図18(b)は、高低差Δhが0[m]の光軸上構造物の場合における距離に対する受信電力の極大値曲線181bと、その初期電力値を距離に対して繋げた直線182bと、距離に対する受信電力の極大値の3次近似曲線183bと、各距離における3次近似曲線上の電力値からその初期電力値を引いた値を距離に対して繋げた曲線184bとを表した図である。
【0149】
同図において、光軸上構造物の受信電力P(dz)曲線181bは、距離dzが狭まるに連れて、線形に増加する。すなわちその曲線181bは、左肩上がりである。
曲線184bは、初期電力値から3次近似曲線183b上の電力値を引いた値を、距離dzが狭まるごとに積算したものである。
【0150】
従って、判定処理部29は、距離dzが狭まるに連れて、受信電力値の極大値が初期電力値から減少している場合に、対象物を上方構造物と判定することができる。
具体的には、判定処理部29は、初期電力値Psと2次以上の近似式または受信電力の極大値曲線との受信電力の差ΔPs(dz)を用いて、上方構造物を識別する。
【0151】
ΔPs(dz)を用いた識別方法として、その処理に掛かる時間が短いものから順に、以下の3つの方法がある。(1) ΔPs(dz)またはΔPs(dz)の絶対値が、所定の閾値より小さい場合に、上方構造物と判定する方法と、(2)距離毎に差ΔPs(dz)が所定の閾値より下がる回数を計数すし、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する方法と、(3)初期電力値Psと2次以上の近似式または受信電力の極大値曲線とに囲まれた区間の積分値を算出し、積分値が所定の積分閾値より下がった場合に、上方構造物と判定する方法とがある。
ここで、上方構造物判別の処理の早さと信頼性とは、トレードオフの関係となる。以下、上記の順番で、具体的に説明する。
【0152】
第1の方法において、判定処理部29は、2次以上の近似式または受信電力の極大値曲線を用いて、予め決められた距離dzにおける受信電力P4(dz)を算出する。そして、判定処理部29は、初期電力値Psと距離dzにおける受信電力P4(dz)との差ΔPsまたはその差ΔPsの絶対値を算出する。そして、判定処理部29は、算出されたΔPsまたはΔPsの絶対値が、所定の閾値より小さい場合に、上方構造物と判定する。
【0153】
第2の方法において、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P4(dz)を算出する。そして、判定処理部29は、初期電力値PsとP4(dz)との差ΔPs(dz)またはその差ΔPs(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔPs(dz)が所定の閾値より下がる回数を計数する。判定処理部29は、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する。
【0154】
なお、第2の方法において、判定処理部29は、以下のようにして、上方構造物を判定してもよい。判定処理部29は、差ΔPs(dz)の絶対値が所定の閾値を超える回数を計数する。判定処理部29は、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する。
【0155】
第3の方法において、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P4(dz)を算出する。そして、判定処理部29は、初期電力値PsとP4(dz)との差ΔPs(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔPs(dz)の和ΣΔPs(dz)を算出する。そして、判定処理部29は、算出した和ΣΔPs(dz)が所定の第2の和閾値より下がった場合に、上方構造物と判定する。
【0156】
なお、判定処理部29は、以下のように上方構造物を判定してもよい。判定処理部29は、差ΔPs(dz)の絶対値の和Σ|ΔPs(dz)|を算出する。そして、判定処理部29は、算出した和Σ|ΔPs(dz)|が所定の絶対値和の閾値を超えた場合に、上方構造物と判定する。
【0157】
続いて、第3の方法で算出した和ΣΔPs(dz)について説明する。図19は、初期電力値と受信電力値の極大値との差分の和を、上方構造物と光軸上構造物とで比較した図である。上方構造物における初期電力値と受信電力値の極大値との差分の和を示した曲線184aより、距離dzが100[m]より狭まるに連れて、その和が0から単調減少する。
【0158】
一方、光軸上構造物における初期電力値と受信電力値の極大値との差分の和を示した曲線184bより、距離dzが100[m]より狭まるに連れて、その和が0から単調増加する。
【0159】
従って、所定の閾値を設定すれば、判定処理部29は、上方構造物を判別することができる。所定の閾値は、上方構造物として識別する際に最低必要となる高低差Δhと、アンテナ感度の仰角パターンとを用いて決定される。ここで、高低差Δhは、レーダ装置のアンテナ光軸の高さh1と、上方構造物の高さh2とから決定される。従って、所定の閾値は、レーダ装置のアンテナ光軸の高さh1と、上方構造物として識別する際に最低必要となる上方構造物の高さと、アンテナ感度の仰角パターンとを用いて決定される。
【0160】
図20は、初期電力値と3次近似式から算出された電力との差分の和を用いた上方構造物の判別処理を示したフローチャートである。また、図20は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS601)。次に、判定処理部29は、距離150[m]付近の極大点を初期電力値Psとして抽出する(ステップS602)。
【0161】
次に、判定処理部29は、距離dz毎に、初期電力値Psと受信電力の極大値の差分ΔPs(dz)を算出する(ステップS603)。次に、判定処理部29は、距離dz毎に算出した差分ΔPs(dz)を所定の距離区間(例えば、150[m]から第1ヌル点に対応する距離まで)積算し、その和ΣΔPs(dz)を算出する(ステップS604)。
【0162】
算出した和ΣΔPs(d)が所定の閾値Pth2よりも小さい場合(ステップS605 NO)、判定処理部29は、対象物を上方構造物と判定する(ステップS606)。
一方、算出した和ΣΔPs(dz)が所定の閾値Pth2以上の場合(ステップS607 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS607)。以上で、本フローチャートは終了する。
【0163】
以上、第4の実施形態によれば、所定の距離における2次以上の近似式の値と初期電力値との差を算出することができる。受信アンテナの光軸上に存在する構造物である光軸上構造物の場合、距離が狭まるにつれて初期値から極値が増加するのに対し、上方構造物の場合、距離が狭まるにつれて初期値から極値が減少する。従って、2次以上の近似式の値と初期値との差に基づいて、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0164】
なお、第4の実施形態によれば、所定の距離における2次以上の近似式の値と初期電力値との差を算出したが、これに限らず、所定の距離における代表点の電力と初期電力値との差を算出してもよい。
また、第4の実施形態における初期電力値は一例であり、予め決められた距離における代表点の電力であればよい。
【0165】
<第5の実施形態>
続いて、第5の実施形態における上方構造物の判別方法を説明する。前述した第4の実施形態においては、初期電力値を基準値として、その基準値と受信電力の極大値との差分を用いて、上方構造物を判別した。
第5の実施形態においては、上方構造物と光軸上構造物との差異を明確にするために、レーダ方程式から算出される自由空間伝搬時の受信電力の理論値を基準値として用いる。
レーダ方程式は以下の式(1)で表される。
【0166】
【数1】

【0167】
ここで、Pff,sは自由空間伝搬時の受信電力値、Ptは送信電力値、Gtは、送信アンテナ利得、Grは受信アンテナ利得、σは反射断面積、λはレーダの波長である。反射断面積は、後述する式(2)から算出される。
この式(1)によって、図6(a)に示す自由空間伝搬減衰曲線53aが決定されている。この場合の主な変数は、距離r1のみである。但し、λもドップラー効果により変動するが、自由空間伝搬減衰曲線53aを算出した条件では無視できる範囲である。
【0168】
Pt、GtおよびGrはレーダ使用条件で決定される定数であるので、走行環境条件とは無関係である。よって、理論上の自由空間伝搬時の受信電力値Pff,sの距離に対する軌跡(すなわち自由空間伝搬減衰曲線)のカーブ形状は固有である。そして、その軌跡は、走行環境条件(反射条件)で変動する反射断面積σの決定によって、受信電力値の軸(縦軸)方向に移動する。
【0169】
判定処理部29が、受信電力の極大値の初期値(例えば、距離150[m]付近の受信電力の極大値)を算出する。ここで、反射断面積σは下記の式(2)から算出される。
【0170】
【数2】
【0171】
ここで、P’ff,sは、推定減衰電力値であり、Lθ1は間接波成分の減衰量である。推定減衰電力値P’ff,sは、対象物の観測距離において、間接波成分の減衰による振幅の減衰を考慮した受信電力の推定値である。判定処理部29は、推定減衰電力値P’ff,sとして、距離に対する受信電力の関係を表す曲線における極大値を用いて、反射断面積σを算出する。
【0172】
ここで、距離に対する受信電力の関係を表す曲線における極大値は、直接波と間接波の位相が揃うことにより、受信電力が強めあうことにより形成される。従って、その極大値は、スパイクノイズ等により影響されにくいので、推定減衰電力値P’ff,sとして用いた場合に、反射断面積σを精度良く推定できる。
【0173】
なお、アンテナの仕様が既知であれば、距離r1に対する振幅減衰量の理論値を算出することができるので、対象物の観測距離に対する振幅減衰量の理論値をP’ff,sとして用いてもよい。
【0174】
判定処理部29は、推定減衰電力値P’ff,sに受信電力の極大値の初期値を代入して、反射断面積σを算出する。そして、判定処理部29は、算出した反射断面積σをレーダ方程式(1)に代入することにより、自由空間伝搬時の受信電力値Pff,sを推定した値である予測の自由空間減衰値(電力の推定値)を算出する。
【0175】
対象物が光軸上構造物の場合、受信アンテナは、対象物に反射した電波の直接波成分をメインローブで受信することができる。従って、自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値とは近い値となる。
一方、対象物が上方構造物である場合には、アンテナ指向性の影響により、上記と同様の方法で算出した自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値とは全く異なった値となる。
以上より、判定処理部29は、自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値との差を用いて、対象物が上方構造物であるか否かを判定する。
【0176】
従って、判定処理部29は、自由空間伝搬時の受信電力値Pff,sと受信電力の極大値の差ΔPff(dz)を用いて、上方構造物を識別する。
具体的には、判定処理部29は、最初の受信電力の極大値(例えば、距離150[m]付近の受信電力の極大値)を初期値として抽出する。この受信電力の極大値は、推定減衰電力値P’ff,sを精度良く推定できる値である。
【0177】
さらに、推定精度を高めるために、間接波成分の減衰による受信電力の減少分を考慮してもよい。また、アンテナの仕様が既知であれば、距離dzに対する上記受信電力の減少量の理論値を算出することができるので、その理論値を推定減衰電力値P’ff,sに適用してもよい。
【0178】
図21は、予測の自由空間伝搬曲線と自由空間伝搬減衰曲線の理論値との比較を説明するための図である。図21(a)は、高低差Δhが4.15[m]である上方構造物における予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。同図において、受信電力値を距離に対して表した曲線211aと、その受信電力値の極大値を距離に対して表した曲線212aが示されている。
【0179】
また、150[m]付近の受信電力値の極大値213aから反射損出を考慮して、6[dB]減少させた値を推定減衰電力値P’ff,sとして算出された予測の自由空間伝搬曲線214aが示されている。また、予測の自由空間伝搬曲線214aは、自由空間伝搬減衰曲線215aと良くフィットしている。
【0180】
図21(b)は、高低差Δhが0[m]である光軸上構造物における予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。同図において、受信電力値を距離に対して表した曲線211bと、その受信電力値の極大値を距離に対して表した曲線212bが示されている。
【0181】
また、150[m]付近の受信電力値の極大値213bから反射損出を考慮して、6[dB]減少させた値を推定減衰電力値P’ff,sとして算出された予測の自由空間伝搬曲線214bが示されている。また、予測の自由空間伝搬曲線214bは、自由空間伝搬減衰曲線215bより大きな電力値を取る曲線である。
【0182】
図22は、予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を距離dzに対して示した図である。同図において、上方構造物の場合、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が、対象物との距離dzが狭まるに連れて単調減少する。また、その値は、対象物との距離が100[m]より狭い場合に、0より小さい。
一方、光軸上構造物の場合、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が、対象物との距離dzが狭まるに連れて単調減少する。しかし、その値は、距離40[m]から150[m]の範囲内で0以上である。
【0183】
従って、判定処理部29は、所定の距離の範囲(例えば、距離40[m]から100[m]までの範囲)において、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が0よりも小さい場合、対象物を上方構造物と判定する。
【0184】
図23は、予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を用いた上方構造物の判別処理を示したフローチャートである。また、図23は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS701)。次に、判定処理部29は、所定の距離(たとえば、距離150[m])付近の受信電力値の極大値を抽出する。そして、判定処理部29は、電波の反射損出を考慮して、その極大値から所定の値(例えば、6[dB])を引いた電力値を推定減衰電力値P’ff,sとして算出する(ステップS702)。
【0185】
次に、判定処理部29は、算出した推定減衰電力値P’ff,sを式(2)に代入して、反射断面積σを算出する(ステップS703)。判定処理部29は、算出した反射断面積σを式(1)に代入して、予測の自由空間減衰値(電力の推定値)を算出する(ステップS704)。次に、判定処理部29は、距離ごとに受信電力の極大値と予測の自由空間減衰値(電力の推定値)との差ΔPff(dz)を算出する(ステップS705)。
【0186】
距離ごとに算出された差ΔPff(dz)が所定の回数以上連続して0より小さい場合(ステップS706 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS707)。一方、距離ごとに算出された差ΔPff(dz)が、所定の回数以上連続して0以上の場合(ステップS706 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS707)。以上で、本フローチャートは終了する。
【0187】
以上、第5の実施形態によれば、所定の距離における極値と電力の推定値との差を算出することができる。光軸上構造物の場合、極値が電力の推定値よりも大きいのに対し、上方構造物の場合、極値が電力の推定値よりも小さい。従って、極値と電力の推定値との差に基づいて、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0188】
なお、第5の実施形態では上方構造物の判定にあたり、所定の距離における極値と電力の推定値との差を算出したが、これに限らず、所定の距離における受信された電力と電力の推定値との差を算出してもよいし、所定の距離における代表点の電力と推定値との差を算出してもよい。
【0189】
<第6の実施形態>
続いて、第6の実施形態における上方構造物の判別方法を説明する。図24は、直接波成分の第1ヌル点を用いた上方向構造物の識別方法を説明するための図である。図24(a)は、高低差Δhが4.15[m]の上方構造物における受信電力を距離に対する関係を示した図である。同図において、受信電力の極大値曲線242aは、受信電力曲線241aの極大値が滑らかに繋がれた曲線である。
【0190】
区域243、区域244および区域245の受信電力の極大値曲線242aの軌跡は、区域244を中心としたお椀型の軌跡となる。この軌跡は、以下の3つの要因で形成される。
第1に、区域243における距離が狭まることによる受信電力の極大値の減衰するのは、距離が狭まるに連れて直接波の到来角度が大きくなることにより、直接波を受けるアンテナ感度のメインローブにおける減衰が生じるからである。
【0191】
第2に、区域244において受信電力の極大値曲線242aが極小値を取るのは、その距離において直接波の到来角度が、アンテナの第1ヌル点に相当する仰角になることにより、直接波を受けるアンテナ感度が最も小さくなるからである。
第3に、区域245において距離が狭まることによる受信電力の極大値の上昇するのは、距離が狭まるに連れて直接波の到来角度が大きくなることにより、直接波を受けるアンテナ感度の第1サイドローブにおける上昇が生じるからである。
【0192】
2次近似曲線246は、区域243、区域244および区域245の受信電力の極大値曲線242aの軌跡に良くフィットする。従って、区域243、区域244および区域245が存在するならば、受信電力の極大値曲線242aは、区域244の近辺に極小値がある2次近似曲線で近似されうる。
【0193】
図24(b)は、高低差Δhが0[m]の光軸上構造物における受信電力を距離に対して示した図である。同図において、受信電力の極大値曲線242bは、受信電力曲線241bの極大値が滑らかに繋がれた曲線である。
上方構造物と異なり、光軸上構造物の受信電力の極大値曲線242bには、アンテナ指向性と直接波の到来角度の変化とが無いため、その軌跡にお椀方の軌跡は存在しない。
【0194】
従って、判定処理部29は、受信電力の極大値曲線242bに現れるお椀方の軌跡の存在する場合には、対象物を上方構造物と判定する。
具体的には、判定処理部29は、受信電力から受信電力の極大値Pmaxを算出する。
そして、判定処理部29は、算出された受信電力の極大値Pmax,iから(iは正の整数で、遠方からiをカウントする)、所定の距離区間(例えば、距離40[m]から60[m]の区間)で観測される受信電力の極大値Pmax,iの最小値Pmax,mを抽出する(mは正の整数)。
【0195】
そして、判定処理部29は、以下の式(3)と式(4)を両方満たすときに、対象物を上方構造物と判定する。
Pmax,m−3>Pmax,m−2>Pmax,m−1>Pmax,m …(3)
Pmax,m+3>Pmax,m+2>Pmax,m+1>Pmax,m …(4)
一方、上記式を満たさない場合、判定処理部29は、対象物を光軸上構造物と判定する。
【0196】
このように、判定処理部29は、連続する大小関係が成立することによって、上方構造物を識別することができる。さらに、判定処理部29は、アンテナの仕様と高低差Δhが既知である場合は、受信電力の極大値の最小値Pmax,mの観測距離と区域244の距離の理論値を照合することにより、高低差Δhを推定する。
【0197】
図25は、距離に対する受信電力の極大値の変化に極小値が存在するか否かを判別することによる上方構造物の判別処理を示したフローチャートである。また、25は、図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大値Pmax,iを算出する(ステップS801)。距離検出部24により検出された対象物との距離が所定の距離よりも小さい場合(例えば、距離が45[m]より小さい場合)、判定処理部29は、受信電力の極大値Pmax,iの中から最小値Pmax,mを抽出する(ステップS802)。
【0198】
次に、判定処理部29は、式(3)が成立するか否か判定する(ステップS803)。式(3)が成立しない場合(ステップS803 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS806)。一方、式(3)が成立する場合(ステップS803 YES)、判定処理部29は、式(4)が成立するか否か判定する(ステップS804)。
【0199】
式(4)が成立しない場合(ステップS804 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS806)。一方、式(4)が成立する場合判定処理部29は、対象物を上方構造物と判定する(ステップS805)。以上で、本フローチャートは終了する。
【0200】
以上、第6の実施形態によれば、予め決められた所定の距離の範囲で、距離に対する代表値の軌跡が下に凸であれば、対象物を上方構造物であると判定することができる。光軸上構造物の場合、距離に対する極値の関数が極小値を取らないのに対し、上方構造物の場合、距離に対する極値の関数が極小値を取る。従って、距離に対する極値の関数が極小値を取るか否かに基づいて、上方構造物であるか否か判定することができる。
【0201】
なお、第6の実施形態では、予め決められた所定の距離の範囲で、距離に対する代表値の軌跡が下に凸であれば、対象物を上方構造物であると判定したが、これに限らず、予め決められた所定の距離の範囲で、距離に対する極値の関数が極小値を取る場合、対象物を上方構造物であると判定してもよい。
【0202】
<第7の実施形態>
続いて、第7の実施形態における上方構造物の判別方法を説明する。第6の実施形態では、下記の2つの要因により、受信電力の極大値の中から最小値を抽出する際に、識別精度が悪くなる問題がある。第1の要因は、スパイクノイズ等による受信電力の極大値の変動である。第2の要因は、レーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れである。第7の実施形態では、この問題を解決するために、改良した上方構造物の判別方法を説明する。
【0203】
判定処理部29は、区域244を中心に、区域243と区域245の幾つかの受信電力の極大値Pmaxを用いて、最小二乗法により2次近似式を算出する。ここで、その2次近似式は下記の式(5)で表される。
【0204】
【数3】
【0205】
ここで、Pmax(dz)は、距離dzにおける受信電力の極大値であり、aは2次の係数であり、bは1次の係数であり、cは定数である。このとき、受信電力の極大値Pmax(dz)が極小値をとる距離dlmを算出するために上記の式(5)を変形すると、下記の式(6)で表される。
【0206】
【数4】
【0207】
従って、受信電力の極大値Pmax(dz)が極小値をとる距離dlmは、以下の式(7)で表される。
【0208】
【数5】
【0209】
判定処理部29は、式(7)を用いて、受信電力の極大値Pmax(dz)が極小値をとる距離dlmを算出する。判定処理部29は、式(7)で算出された極小値をとる距離dlmが距離40[m]以上で、かつ150[m]以下の場合、対象物を上方構造物と判定する。
第7の実施形態の方法により、受信電力の極大値の中から最小値を算出する際に、2次関数で近似することによって、上記識別精度が悪くなる問題を解決することができる。
【0210】
具体的には、スパイクノイズ等による受信電力の極大値の変動があっても、距離に対する受信電力の極大値の関係を2次関数で近似することができる。これによって、スパイクノイズ等による受信電力の極大値の変動があっても、ロバストに受信電力の極大値の中から最小値を抽出することができる。
【0211】
また、レーダ装置のサンプリング周波数が低いことによる受信電力値に取得漏れがあっても、距離に対する受信電力の極大値の関係を2次関数で近似することができる。これによって、受信電力値に取得漏れがあっても、ロバストに受信電力の極大値の中から最小値を抽出することができる。
【0212】
図26は、高低差Δh毎に2次近似式により算出された極小値をとる距離と、高低差Δh毎に算出された第1ヌル点に対応する距離の理論値との比較を説明するための図である。同図において、曲線261は、高低差Δh毎に2次近似式により算出された極小値をとる距離を滑らかに繋いだ曲線である。曲線262は、第1ヌル点に対応する距離の理論値を滑らかに繋いだ曲線である。
【0213】
同図において、曲線262の高低差Δhは第1ヌル点に対応する距離の理論値に対して線形に変化する。ここで、曲線261と、曲線262とは良好に一致している。従って、第1ヌル点に対応する距離の理論値と高低差Δhとの関係を用いて、2次近似式により算出された極小値をとる距離から高低差Δhを推定することができる。
【0214】
図27は、第1ヌル点に対応する距離の理論値と高低差Δhとが関係付けたテーブルである。同図のテーブル270において、第1ヌル点に対応する距離の理論値と高低差Δhとが1対1で関係付けられている。
記憶部21は、極小値を取る距離dlmと高低差Δhとが関係付けたテーブル270を保持する。
【0215】
従って、判定処理部29は、記憶部21に格納されたテーブル270から2次近似式により算出された極小値に対応する高低差Δhを抽出する。これによって、判定処理部29は、対象物の高低差Δhを推定することができる。
【0216】
図28は、2次近似式により算出された極小値をとる距離を用いた上方構造物の判別処理を示したフローチャートである。また、図28は、図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大値Pmax,iを算出する(ステップS901)。距離検出部24により検出された対象物との距離が所定の距離よりも狭まった場合(例えば、距離が45[m]より狭まった場合)、判定処理部29は、その距離に対する受信電力値の極大値の曲線から、2次の近似関数を算出する距離区間を決定する(ステップS902)。
【0217】
次に、判定処理部29は、算出した距離区間において、最小二乗法を用いて距離に対する電力値の極大値の2次の近似関数を算出する(ステップS903)。次に、判定処理部29は、算出した2次の近似関数から式(7)を用いて、極小値をとる距離dlmを算出する(ステップS904)。
【0218】
判定処理部29が、極小値をとる距離dlmが検知できない場合(ステップS905 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS906)。
一方、判定処理部29が、極小値をとる距離dlmが検知できる場合(ステップS905 YES)、判定処理部29は、極小値をとる距離dlmと距離40[m]とを比較する(ステップS907)。
【0219】
極小値をとる距離dlmが40[m]以上であれば(ステップS907 YES)、テーブル270から高低差Δhが3.5[m]以上あるので、判定処理部29は、対象物を上方構造物と判定する(ステップS908)。
一方、極小値をとる距離dlmが40[m]未満であれば(ステップS907 NO)、テーブル270から高低差Δhが3.5[m]未満なので、判定処理部29は、対象物を光軸上構造物と判定する(ステップS909)。
【0220】
判定処理部29は、記憶部21に格納されたテーブル270から、極小値をとる距離dlmに対応する高低差Δhを抽出する(ステップS910)。判定処理部29は、算出された高低差Δhにそのレーダ装置のアンテナ光軸の高さh1を加算して、対象物の高さh2の推定値を算出する(ステップS911)。
【0221】
対象物の高さh2の推定値が2[m]より大きい場合(ステップS912 YES)、判定処理部29は、対象物を普通トラックと判定する(ステップS913)。一方、対象物の高さh2の推定値が2[m]以下の場合(ステップS912 NO)、判定処理部29は、対象物を乗用車と判定する(ステップS914)。以上で、本フローチャートは終了する。
【0222】
なお、本フローチャートでは、対象物を光軸上構造物と判定した場合に、テーブル270から高低差を抽出して、その対象物の高さを推定したが、これに限らず、対象物を上方構造物と判定した場合に、テーブル270から高低差を抽出して、その対象物の高さを推定してもよい。
【0223】
また、判定処理部29は、ステップS908において対象物を上方構造物と判定した後に、自車両が対象物と衝突するか否か判定してもよい。具体的には、例えば、判定処理部29が、ステップS910とステップS911と同一の方法で対象物の高さを推定する。そして、判定処理部29は、記憶部21から自車両の地上からの高さを読み出す。そして、判定処理部29は、読み出した自車両の地上からの高さが算出された対象物の高さ以上の場合、不図示のスピーカから警報を鳴らすよう制御する。
これにより、判定処理部29は、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。
【0224】
また、第7の実施形態では、記憶部21に格納されたテーブル270から高低差Δhを抽出したが、これに限らず、下記の方法によって、高低差Δhを算出してもよい。
記憶部21が、アンテナ感度の仰角パターンによって第1ヌルの仰角度θと極小値を取る距離dlmとを関連付けたテーブルを予め保持する。判定処理部29は、記憶部21に格納されたそのテーブルから極小値を取る距離dlmに対応する第1ヌルの仰角度θを抽出する。そして、判定処理部29は、極小値を取る距離dlmにtanθを乗じることにより高低差Δhを算出する。
【0225】
以上、第7の実施形態によれば、所定の距離区間における距離に対する極値の関数を2次関数で近似し、2次関数の極小値を取る距離を算出し、その距離に基づいて対象物を上方構造物であるか否か判定することができる。従って、スパイクノイズ等による受信電力の変動の影響またはレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れの影響を受けることなく、ロバストに上方構造物であるか否か判定することができる。
【0226】
また、記憶部から極小値を取る距離に対応する高さの差を抽出することができるので、その高さの差を用いて対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0227】
なお、第7の実施形態では、所定の距離において、距離に対する複数の代表点の電力を2次関数で近似し、2次関数が極小値を取る距離を算出し、極小値を取る距離に基づいて、対象物を上方構造物であるか否か判定したが、これに限定されるものではない。2次関数が最小値を取る距離を算出し、最小値を取る距離が所定の距離の範囲内で一番遠くない場合に、対象物を上方構造物であると判定してもよい。
また、所定の距離の範囲における複数の代表点を距離の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定してもよい。
【0228】
以上により、第1の実施形態から第7の実施形態までのそれぞれの方法によって、判定処理部29は、対象物を上方構造物であるか否か判定することができる。また、第1の実施形態から第7の実施形態までの方法のうち、2個以上の方法の条件を満たすことによってのみ、上方構造物と判定してもよい。
【0229】
例えば、第1の実施形態で示す距離に対する受信電力曲線の極大値の数が所定の閾値を越えて、かつ第2の実施形態で示す距離に対する受信電力曲線の極大値の1次近似式の係数が0より大きいときに、対象物を上方構造物と判定してもよい。
これによって、精度を上げて、対象物を上方構造物であるか否か判定することができる。
【0230】
なお、本発明の各実施形態では、受信電力算出部22は、検出された距離の関数として受信電力を算出したが、これに限らず、受信電力算出部22が、時間の関数として受信された電波の電力を算出してもよいし、また受信された電波の電力を所定の時間間隔または距離間隔で電波を取得した際の取得回数に対する関数として算出してもよい。
例えば、対象物が止まっている場合、時間が経つとともに、レーダと対象物との距離が縮まる。これにより、受信電力を時間の関数と表した場合でも、判定処理部29は、対象物を上方構造物であるか否か判定することができる。
【0231】
また、ADC(受信波取得部)7が、受信された電波を所定の時間間隔で取得した回数(サンプル数)を計数し、受信電力算出部22が、その回数の関数として受信された電波の電力を算出してもよい。
【0232】
さらに、本発明の各実施形態では、ADC(受信波取得部)7が、所定のサンプリング周波数で、ミキシングされた受信波をデジタル信号へ変換したが、これに限ったものではない。他の受信波取得部が、所定の時間間隔で、受信アンテナで受信された電波を取得してもよい。その場合、受信電力算出部22は、その取得回数の関数として受信された電波の電力を算出してもよい。
【0233】
また、本発明の各実施形態では、受信電力の距離に対する変化を表す曲線上に現れる極大値を用いたが、これに限らず、受信電力の距離に対する変化を表す曲線上に現れる極小値を用いてもよい。極小値前後の受信電力曲線は、極大値前後の受信電力曲線よりも、距離に対して急峻に変化しているので、極小値を用いる場合、極大値を用いる場合よりも、受信電力の極値における距離を正確に算出することができる。
【0234】
また、本発明の各実施形態では、電子走査型レーダ装置を用いて説明したが、これに限らず、機械操作式レーダ装置であってもよい。機械操作式レーダ装置を用いた時の受信電力の距離に対する変化は、電子走査型レーダ装置を用いた時の受信電力の距離に対する変化と、等価なものだからである。
【0235】
また、本発明の各実施形態である信号処理部20の機能またはその機能の一部をコンピュータで実現するようにしてもよい。この場合、その機能を実現するためのコンピュータプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたコンピュータプログラムをコンピュータシステムに読み込ませ、実行することによって実現してもよい。なお、ここでいう「コンピュータシステム」とは、OS(Operating System)や周辺機器のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、光ディスク、メモリカード等の可搬型記録媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバーやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定期間プログラムを保持するものを含んでもよい。また上記のコンピュータプログラムは、前述した機能の一部を実現するためのものであってもよく、さらに前述した機能をコンピュータシステムにすでに記録されているコンピュータプログラムとの組み合わせにより実現するものであってもよい。
【0236】
以上、本発明の各実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0237】
11、1n 受信アンテナ
21、2n ミキサ
3 送信アンテナ
4 分配器
51、5n フィルタ
6 SW
7 ADC(受信波取得部)
8 制御部
9 三角波生成部
10 VOC
20 信号処理部
21 記憶部
22 受信電力算出部
23 DBF処理部
24 距離検出部
25 速度検出部
26 方位検出部
27 物標引継ぎ処理部
28 代表点抽出部
29 判定処理部
30 物標出力処理部
【技術分野】
【0001】
本発明は、レーダ装置およびコンピュータプログラムに関する。
【背景技術】
【0002】
従来、ミリ波レーダ(以下、レーダと称する)は、通常、自動車の車体前方に搭載され、車間警報、車速制御などに用いられている。車載レーダとしては、FMCW(Frequency Modulated Continuous Wave)レーダ、多周波CW(Continuous Wave)レーダ、及びパルスレーダ等の方式を利用した電子走査型のレーダが用いられている。
【0003】
レーダを搭載した自車の周囲に障害物が存在する場合、車載レーダは自車と障害物との相対的な距離、方位、速度などの情報を有した物標データを車間警報、車速制御システムに供給する。車間警報、車速制御システムは、その物標の位置情報に応じて、自車と障害物との距離を維持させたり、衝突が予想される場合には警報を発したり、自車を減速させたりするといった自車の制御(以下、衝突軽減制御と称する)を行う(例えば、特許文献1参照)。そのため、車載レーダは、自車両に衝突する危険性がある対象物を迅速にかつ正確に検知する性能が要求されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−275840号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般車道において、高架橋、スノーシェルター、土石シェルター等、レーダの受信アンテナ光軸の高さより十分に高い位置に反射構造物(以下、上方構造物と称する)が存在する。これらの上方構造物は、保安規定から、車高よりも十分高い位置(具体的には、4.5m以上)に設置が義務付けられているため、車両の走行の妨げとはならない。
【0006】
しかしながら、従来のレーダ装置は、上方構造物を衝突危険対象物として誤検知するという問題があった。そうすると、衝突事故が物理的に発生しない安全な走行状況にも関わらず、車両制御機器は上記レーダ装置の誤検知により衝突の危険性がある状況であると判断してしまう。この誤検知が原因で、不要な警報の発信または不要な自車両の減速といった制御が行われ、運転者への不快をもたらしてしまう。
【0007】
上記問題に対して、アンテナの指向性制御を用いた手法が開発されているが、その導入にはアンテナの高性能化または高機能化が伴う。しかしながら、小型化、低コスト化が求められる車載用レーダにおいては、アンテナの指向性制御によって上方構造物の検知を完全に抑制するのは困難である。
【0008】
そこで本発明は、上記問題に鑑みてなされたものであり、アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別するレーダ装置及びコンピュータプログラムを提供することを課題とする。
【課題を解決するための手段】
【0009】
[1]上記の課題を解決するために、本発明の一態様であるレーダ装置は、電波を送信する送信アンテナと、前記送信された電波が対象物により反射された電波を受信する受信アンテナと、前記受信された電波を所定の時間間隔で取得する受信波取得部と、前記受信波取得部の取得回数の関数として、前記受信された電波の電力を算出する受信電力算出部と、前記関数から複数の代表点を抽出する代表点抽出部と、前記代表点に基づいて前記対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部と、を備えることを特徴とする。
上記レーダ装置によれば、適切な代表点を抽出することによりスパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0010】
[2]上記[1]記載のレーダ装置において、前記代表点抽出部は、前記関数の極値を取る点を抽出し、前記判定処理部は、前記極値に基づいて前記上方構造物であるか否か判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0011】
[3]上記[2]記載のレーダ装置において、前記判定処理部は、前記極値の数を計数し、前記極値の数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする。
これによれば、上方構造物の高さが高くなるほど極値の数が多くなる関係をもつことから、所定の閾値を適切に設定することにより、ロバストに対象物を上方構造物と判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0012】
[4]上記[3]に記載のレーダ装置において、極値の数と、前記対象物と前記受信アンテナの光軸との高さの差を関係づけて記憶する記憶部を更に備え、前記判定処理部は、前記記憶部から前記計数した極値の数に対応する前記高さの差を抽出することを特徴とする。
これによれば、計数した極値の数から対象物と受信アンテナの光軸との高さの差を抽出することができるので、上記高さの差から対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0013】
[5]上記[1]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、前記近似関数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、適切な近似関数を算出することにより、算出された近似関数の特性から対象物が上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0014】
[6]上記[5]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記1次関数の1次の係数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする。
これによれば、所定の閾値が適切に選択されることにより、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0015】
[7]上記[5]に記載のレーダ装置において、前記取得回数と前記代表点における電力の関係を1次関数で近似し、所定の前記取得回数における前記1次関数の値と前記受信された電波の電力または前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、1次関数の値と受信された電力との差と所定の閾値とを比較することにより、上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0016】
[8]上記[5]に記載のレーダ装置において、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記取得回数と前記代表点における電力の関係を2次以上の関数で近似し、所定の前記取得回数における前記1次関数の値と前記2次以上の関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、同距離における1次関数の値と2次以上の関数の値の差が大きくなるので、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。従って、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0017】
[9]上記[1]に記載のレーダ装置において、前記判定処理部は、予め決められた前記取得回数における前記代表点の電力に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、予め決められた取得回数(例えば、対象物との距離150[m]に相当する取得回数)を適切に決めることによって、その取得回数における代表点の電力に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0018】
[10]上記[9]に記載のレーダ装置において、前記判定処理部は、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記代表点の電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、予め決められた取得回数(例えば、対象物との距離150[m]に相当する取得回数)における代表点の電力と、所定の取得回数(例えば、対象物との距離100[m]に相当する取得回数)における代表点の電力との差に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0019】
[11]上記[9]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点の電力の関係を2次以上の関数で近似し、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記2次以上の関数の値とを算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、2次以上の近似式の値と初期値との差に基づいて、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0020】
[12]上記[1]に記載のレーダ装置において、前記判定処理部は、前記代表点における電力に基づいて前記対象物の反射断面積を算出し、前記反射断面積に基づいて、所定の前記取得回数における前記受信された電波の電力の推定値を算出し、前記推定値に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、電力の推定値を受信された電波の電力または代表点の電力と比較することにより、上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0021】
[13]上記[12]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、代表点の電力と電力の推定値との差に基づいて、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0022】
[14]上記[12]に記載のレーダ装置において、前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、所定の取得回数における電力の推定値と近似関数の値との差に基づいて、ロバストに対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0023】
[15]上記[1]に記載のレーダ装置において、前記代表点抽出部は、所定の前記取得回数の範囲における前記受信された電波の電力から複数の代表点を抽出し、前記判定処理部は、前記所定の取得回数における前記複数の代表点に基づいて前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、所定の取得回数の範囲において取得回数に対する複数の代表点に基づいて、対象物を上方構造物であるか否か判定することができるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0024】
[16]上記[15]に記載のレーダ装置において、前記所定の取得回数において前記取得回数に対する前記複数の代表点の軌跡が下に凸であれば、前記対象物を前記上方構造物であると判定することを特徴とする。
これによれば、予め決められた取得回数における複数の代表点のうちで極小値を取る点があれば、対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0025】
[17]上記[15]に記載のレーダ装置において、前記所定の取得回数において前記複数の代表点を前記取得回数の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の極大値の変動およびレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れによる影響を受けずに、ロバストに対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0026】
[18]上記[15]に記載のレーダ装置において、前記判定処理部は、前記所定の取得回数に対する前記複数の代表点の電力を2次関数で近似し、前記2次関数が極小値または最小値を取る取得回数を算出し、前記極小値または前記最小値を取る取得回数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする。
これによれば、スパイクノイズ等による受信電力の極大値の変動およびレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れによる影響を受けずに、ロバストに対象物を上方構造物であると判定できるので、上方構造物を衝突危険対象物として誤検知することを防ぐことができる。
【0027】
[19]上記[18]に記載のレーダ装置において、前記取得回数と、前記対象物と前記受信アンテナの光軸との高さの差とを関係づけて記憶する記憶部を更に備え、前記判定処理部は、前記記憶部から前記極小値または前記最小値を取る取得回数に対応する前記高さの差を抽出することを特徴とする。
これによれば、記憶部から極小値を取る距離に対応する高さの差を抽出することができるので、その高さの差を用いて対象物の高さを算出することができる。これにより、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0028】
[20]上記の課題を解決するために、本発明の一態様であるコンピュータプログラムは、受信アンテナにより受信された電波を所定の時間間隔で取得を行う第1のステップと、前記取得の回数の関数として、前記受信された電波の電力を算出する第2のステップと、前記関数から複数の代表点を抽出する第3のステップと、前記代表点に基づいて前記対象物を前記受信アンテナの光軸より上方にある上方構造物であるか否か判定する第4のステップと、をコンピュータに実行させるためのコンピュータプログラムである。
上記コンピュータプログラムによれば、取得の回数に対する受信された電波の関数から、複数の代表点を抽出し、その複数の代表点に基づいて対象物を上方構造物であるか否か判定することができる。従って、適切な代表点を抽出することによりスパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【発明の効果】
【0029】
本発明によれば、アンテナの指向性制御によらずに、検知した対象物が上方構造物であるか否か判別することができる。
【図面の簡単な説明】
【0030】
【図1】本発明の各実施形態で共通する電子走査型レーダ装置の構成例を示すブロック図である。
【図2】送信波及び受信波により、三角波の上昇領域及び下降領域におけるビート信号の生成を説明する概念図である。
【図3】複数本のアンテナの配列している面に対して垂直方向の軸に対する反射波の到来角度を算出する方法を示した図である。
【図4】物標抽出処理全体のフローチャートである。
【図5】数値シミュレーションに用いた車両と上方構造物の位置関係を示した模式図である。
【図6】上方構造物または光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。
【図7】対象物との距離に対する上方構造物の受信電力と、その極大点を表した図である。
【図8】極大点の抽出処理を示したフローチャートである。
【図9】対象物との距離に対する受信電力曲線上に表される受信電力の極大点と、それぞれの極大点の数を表した図である。
【図10】高低差に対する極大値の検出数を表した図である。
【図11】極大値の検出数Kと高低差Δhとが関係付けられたテーブルを説明するための図である。
【図12】極大点の検出数を用いた上方構造物判別処理を示したフローチャートである。
【図13】距離に対する受信電力曲線の極大値を繋いだ曲線とその極大値を繋いだ曲線の近似直線を示した図である。
【図14】1次近似直線の1次の係数と高低差との関係を示した図である。
【図15】1次近似直線の1次の係数を用いた上方構造物の判別処理を示したフローチャートである。
【図16】受信電力の極大値曲線と、その1次近似直線と、その3次近似曲線と、1次近似直線上の電力値と3次近似曲線上の電力値との差分の絶対値の和を表した図である。
【図17】1次近似式から算出された電力と3次近似式から算出された電力との差分の絶対値の和を用いた上方構造物の判別処理を示したフローチャートである。
【図18】受信電力の極大値曲線と、その初期電力値を表す直線と、その3次近似曲線と、初期電力値と3次近似曲線上の電力値との差分の絶対値の和を表した図である。
【図19】初期電力値と受信電力値の極大値との差分の和を、上方構造物と光軸上構造物とで比較した図である。
【図20】初期電力値と3次近似式から算出された電力との差分の和を用いた上方構造物の判別処理を示したフローチャートである。
【図21】予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。
【図22】予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を距離dzに対して示した図である。
【図23】予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を用いた上方構造物の判別処理を示したフローチャートである。
【図24】直接波成分の第1ヌル点を用いた上方向構造物の識別方法を説明するための図である。
【図25】距離に対する受信電力の極大値の変化に極小値が存在するか否かを判別することによる上方構造物の判別処理を示したフローチャートである。
【図26】高低差Δh毎に2次近似式により算出された極小値をとる距離と、高低差Δh毎に算出された第1ヌル点に対応する距離の理論値との比較を説明するための図である。
【図27】極小値を取る距離dlmと高低差Δhとが関係付けたテーブルである。
【図28】2次近似式により算出された極小値をとる距離を用いた上方構造物の判別処理を示したフローチャートである。
【発明を実施するための形態】
【0031】
以下、本発明の本発明の各実施形態で共通する電子走査型レーダ装置(FMCW方式ミリ波レーダ)について図面を参照して説明する。図1は本発明の各実施形態で共通する電子走査型レーダ装置の構成例を示すブロック図である。
【0032】
同図において、本発明の各実施形態で共通する電子走査型レーダ装置1は、受信アンテナ11〜1nと、ミキサ21〜2nと、送信アンテナ3と、分配器4と、フィルタ51〜5n(nは正の整数)、SW(スイッチ)6と、ADC(A/Dコンバータ、受信波取得部)7と、制御部8と、三角波生成部9と、VCO(Voltage Controlled Oscillator)10と、信号処理部20とを用いて構成されている。
【0033】
上記信号処理部20は、記憶部21と、受信電力算出部22と、DBF検知部23と、距離検出部24と、速度検出部25と、方位確定部26と、物標引継ぎ処理部27と、代表点抽出部28と、判定処理部29と、物標出力処理部30とを用いて構成されている。
【0034】
次に、図1を参照して、本発明の各実施形態で共通する電子走査型レーダ装置の動作を説明する。
受信アンテナ11〜1nは、送信波が対象物にて反射し、この対象物から到来する反射波、すなわち受信波を受信する。
ミキサ21〜2n各々は、送信アンテナ3から送信される送信波と、各受信アンテナ11〜1nそれぞれにおいて受信された受信波が増幅器により増幅された信号とを混合して、それぞれの周波数差に対応したビート信号を生成する。
【0035】
上記送信アンテナ3は、三角波生成部9において生成された三角波信号を、VCO10において周波数変調した送信信号を対象物に対して送信波として送信する。
分配器4は、VCO10からの周波数変調された送信信号を、上記ミキサ21〜2nおよび送信アンテナ3に分配する。
【0036】
フィルタ51〜5n各々は、それぞれミキサ21〜2nにおいて生成された各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号に対して帯域制限を行い、SW(スイッチ)6へ帯域制限されたビート信号を供給する。
SW6は、制御部8から入力されるサンプリング信号に対応して、フィルタ51〜5n各々を通過した各受信アンテナ11〜1nに対応したCh1〜Chnのビート信号を、順次切り替えて、ADC(受信波取得部)7に供給する。
【0037】
ADC(受信波取得部)7は、上記SW6から上記サンプリング信号に同期して入力される各受信アンテナ11〜1n各々に対応したCh1〜Chnのビート信号を、上記サンプリング信号に同期して所定のサンプリング周波数でA/D変換してデジタル信号に変換し、信号処理部20における記憶部21の波形記憶領域に順次記憶させる。換言すれば、ADC(受信波取得部)7は、ビート信号を所定の時間間隔で取得する。
【0038】
制御部8は、マイクロコンピュータなどにより構成されており、図示しないROMなどに格納された制御プログラムに基づき、図1に示す電子走査型レーダ装置全体の制御を行う。
信号処理部20内の記憶部21は、A/Dコンバータ7においてデジタル変換されたデジタル信号を各受信アンテナ11〜1nに対応したチャンネルごとに格納する。
【0039】
また、記憶部21は、自車両の地上からの高さと自車両が積載する荷物の地上からの高さとを保持する。また、記憶部21は、後述する極大値の検出数と高低差とを関係付けたテーブル100を保持する。また、記憶部21は、後述する第1ヌル点に対応する距離の理論値と高低差とを関係付けたテーブル270を保持する。
【0040】
<距離、相対速度、水平角度(方位)を検出する原理>
次に、図2を用いて、本発明の各実施形態で共通する信号処理部20において用いられる、電子走査型レーダ装置と対象物との距離、相対速度、角度(方位)を検出する原理について簡単に説明する。
【0041】
図2は、図1の三角波生成部9において生成された信号をVCO10において、中心周波数f0、変調幅Δfで周波数変調した送信信号と、その送信信号が対象物に反射されて受信信号として入力される状態を示す。図2の例は対象物が1つの場合を示している。
【0042】
図2(a)に示すように、送信する信号に対し、対象物からの反射波である受信信号が、レーダと対象物との距離に応じて右方向(時間遅れ方向)に遅延されて受信される。さらに、ドップラー効果によって対象物との相対速度に応じて、送信信号に対して上下方向(周波数方向)に変動する。
【0043】
受信電力算出部22は、記憶部21に格納された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号(図2(a)の下図)に対して、フーリエ変換を行う。ここで、フーリエ変換後の複素数データの振幅を信号レベルと呼ぶこととする。
【0044】
受信電力算出部22は、何れかのアンテナにおける複素数データまたは、全アンテナの複素数データの加算値を周波数スペクトル化することにより、スペクトルの各ピーク値に対応するビート周波数、すなわち距離に依存した対象物の存在として検出することができる。ここで、全アンテナの複素数データの加算により、ノイズ成分が平均化されてS/N比が向上する。
【0045】
フーリエ変換の結果、図2(b)に示されるように、対象物が1つの場合、上昇領域及び下降領域にそれぞれに1つのピーク値を有することなる。ここで、図8(b)は横軸が周波数、縦軸が信号強度となっている。
【0046】
そして、受信電力算出部22は、図2(b)に示すビート周波数毎の信号レベルから、予め設定された数値(閾値)を超える信号レベルを検出することによって、対象物が存在していることを判定する。ここで、信号レベルのピーク値を受信波の強度と称す。
【0047】
受信電力算出部22は、信号レベルのピークを検出した場合、ピーク値のビート周波数(ビート信号の上り部分及び下り部分の双方)を対象物周波数として距離検出部24、速度検出部25へ供給する。受信電力算出部22は、周波数変調幅Δfを距離検出部24へ供給し、中心周波数f0を速度検出部25へ供給する。
【0048】
また、受信電力算出部22は、所定のサイクルで信号レベルの下り部分のピーク値の二乗を受信電力として算出する。後述する距離検出部24から入力された対象物との距離の関数として、前記受信電力を代表点抽出部28へ供給する。
【0049】
受信電力算出部22は、信号レベルのピークを検出できなかった場合、物標候補がないという情報を物標出力処理部30に供給する。
なお、ビート信号の上り部分のピーク値、またはビート信号の上り部分のピーク値とビート信号の下り部分のピーク値の平均を信号レベルとして使用してもよい。
【0050】
複数の対象物が存在する場合、フーリエ変換後には、ビート信号の上り部分とビート信号の下り部分のそれぞれに対象物の数と同じ数のピークが表れる。レーダと対象物の距離に比例して、受信信号が遅延し、図2(a)の上段における受信信号は右方向にシフトするので、レーダと対象物との距離が離れるほど、図2(a)の下段におけるビート信号の周波数は大きくなる。
【0051】
複数の対象物に対応する信号レベルのピークが複数検出された場合には、上りの部分および下りの部分のピーク値ごとに、周波数が小さいものから順番に番号をつけて、判定処理部29へ供給する。ここで、上りおよび下りの部分において、同じ番号のピークは、同じ対象物に対応しており、それぞれの識別番号を対象物の番号とする。
【0052】
次に、距離検出部24は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により距離rを算出する。距離検出部24は、算出された対象物との距離を受信電力算出部22と、物標引継ぎ処理部27とへ供給する。また、距離検出部24は、その対象物との距離を記憶部21へ保存する。
r={C・T/(2・Δf)}・{(fu+fd)/2}
【0053】
また、速度検出部25は、受信電力算出部22から入力される上昇部分の対象物周波数fuと、下降部分の対象物周波数fdとから、下記式により相対速度vを算出し、物標引継ぎ処理部27へ供給する。
v={C/(2・f0)}・{(fu−fd)/2}
【0054】
上記距離r及び相対速度vを算出する式において、Cは光速度、Tは変調時間(上昇部分/下降部分)、fuは上昇部分における対象物周波数、fdは下降部分における対象物周波数である。
【0055】
次に、本発明の各実施形態で共通する受信アンテナ11〜1nは、図1に示すように、間隔dにより配置されたアレー状のアンテナである。上記受信アンテナ11〜1nには、アンテナの配列している面に対する垂直方向の軸との角度φ方向から入射される、対象物からの到来波(入射波、すなわち送信アンテナ3から送信した送信波に対する対象物からの反射波)が入力する。
【0056】
このとき、上記到来波は、上記受信アンテナ11〜1nにおいて同一角度φにて受信される。端ともう1端の受信アンテナ間にて発生する受信信号の位相差は、受信信号の周波数f、端ともう1端の受信アンテナ間の間隔dn−1および角度φから、位相差は、2πf・(dn−1・sinφ/C)で算出される。
【0057】
上記位相差を利用して、DBF(デジタルビームフォーミング)処理部23は、入力される各アンテナに対応した時間軸でフーリエ変換された複素データを、アンテナの配列方向にさらにフーリエ変換し、すなわち空間軸フーリエ変換を行う。そして、DBF処理部23は、角度分解能に対応した角度チャネル毎のスペクトルの強度を示す空間複素数データを算出し、ビート周波数毎に方位検出部26に供給する。
【0058】
方位検出部26は、算出されたビート周波数毎の空間複素数データの値の大きさのうち、一番大きな値を取る角度φを対象物の方位として物標引継ぎ処理部27に供給する。また、方位検出部26は、その対象物の方位を記憶部21に保存する。
【0059】
物標引継ぎ処理部27は、現在のサイクルで算出した対象物の距離、相対速度、方位の値と、記憶部21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定する。
【0060】
その場合、物標引継ぎ処理部27は、記憶部21から読み出したその対象物の物標引継ぎ処理回数を1増やす。そうでない場合には、物標引継ぎ処理部27は、新しい対象物を検知したとみなす。また、物標引継ぎ処理部27は今回の対象物の距離、相対速度、方位およびその対象物の物標引継ぎ処理回数を記憶部21に保存する。また、物標引継ぎ処理部27は、代表点抽出部28へ対象物の識別番号を供給する。
【0061】
代表点抽出部28は、受信電力算出部22から供給された対象物との距離の関数である受信電力を受け取る。そして、代表点抽出部28は、対象物との距離の関数である受信電力の極大値を代表値として抽出する。そして、代表点抽出部28は、受信電力の極値を対象物との距離の関数として算出する。代表点抽出部28は、算出した対象物との距離の関数である受信電力の極値を判定処理部29に供給する。
【0062】
なお、代表点抽出部28は、極大値を代表値として抽出したがこれに限らず、極小値を代表値として抽出してもよい。また、代表点抽出部28は、所定の距離区間内の平均値または中央値を代表値として抽出してもよい。また、代表点抽出部28は、隣合う極大値と極小値との平均値または中央値を代表値として抽出してもよい。
【0063】
判定処理部29は、代表点抽出部28から供給された対象物との距離の関数である受信電力の極値を受け取る。そして、判定処理部29は、後述する上方構造物の判別アルゴリズムを用いて、対象物が衝突の危険性が伴う通常検知対象物であるか走行に支障をきたさない上方構造物であるかを判別し、その判別結果の情報を物標出力処理部30に供給する。
【0064】
物標出力処理部30は、対象物が通常検知対象物である場合に、その対象物の識別番号を物標として供給する。物標出力処理部30は、判定処理部29から供給された複数の対象物の判別結果の情報を受け取り、そのどちらもが通常検知対象物である場合、記憶部21からそれぞれの対象物の方位を読み出す。物標出力処理部30は、それぞれの対象物の方位から、自車の車線上にある対象物を抽出し、自車の車線上にある対象物の識別番号を物標として不図示の外部装置に供給する。
【0065】
これによって、その外部装置は、対象物が衝突の危険性を伴う通常検知対象物である場合に、衝突を回避するために減速するか、または運転手に注意を促すために警報を発することができる。
【0066】
また、物標出力処理部30は、複数の対象物の判別結果の情報を受け取り、そのどちらもが通常検知対象物である場合であって、2つ以上の対象物が自車の車線上にある場合、記憶部21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として供給する。なお、物標出力処理部30は、対象物が低背検知対象物である場合、または受信電力算出部22から物標候補がないという情報が入力された場合には、物標なしという情報を供給する。
【0067】
次に、物標抽出全体の処理の流れについて、図4のフローチャートを参照して説明する。図4は、物標抽出処理全体のフローチャートである。信号処理部20は、AD変換された各受信アンテナ11〜1nに対応したチャンネルごとのビート信号を記憶部21に格納する(ステップS101)。
【0068】
次に、受信電力算出部22は、各受信アンテナ11〜1nに対応したチャンネルごとのビート信号をフーリエ変換し、信号レベルを算出する(ステップS102)。
受信電力算出部22は、アンテナ毎に時間方向にフーリエ変換した値をDBF処理部23へ供給する。
【0069】
また、受信電力算出部22は、周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数を距離検出部24へ供給する。
また、受信電力算出部22は、中心周波数f0、上昇部分の対象物周波数および下降部分の対象物周波数を速度検出部25へ供給する。
【0070】
また、受信電力算出部22は、信号レベルの下り部分のピーク値を判定処理部29へ供給する。
また、受信電力算出部22は、受信波の強度を検出できなかった場合、物標候補がないことを物標出力処理部30に供給する。
【0071】
次に、DBF処理部23は、受信電力算出部22から入力されたアンテナ毎に時間方向にフーリエ変換した値を、アンテナの配列方向にさらにフーリエ変換を行い、角度分解能に対応した角度チャネル毎の空間複素数を計算し、ビート周波数毎に方位検出部26へ供給する(ステップS103)。
【0072】
次に、距離検出部24は、受信電力算出部22から入力される周波数変調幅Δf、上昇部分の対象物周波数および下降部分の対象物周波数から、距離を算出する(ステップS104)。また、速度検出部25は、受信電力算出部22から入力される中心周波数、上昇部分の対象物周波数および下降部分の対象物周波数から、相対速度を算出する(ステップS104)。
【0073】
方位検出部26は、算出されたビート周波数毎の空間複素数のうち、一番振幅が大きな値を取る角度を、対象物が存在する方位として物標引継ぎ処理部27に供給する(ステップS105)。
【0074】
次に、物標引継ぎ処理部27は、今回算出した対象物の距離、相対速度、方位の値と、記憶部21から読み出した1サイクル前に算出された対象物の距離、相対速度、方位の値とのそれぞれの差分の絶対値が、それぞれの値毎に決められた値よりも小さい場合、1サイクル前に検知した対象物と今回検知した対象物を同じものと判定し、記憶部内の対象物の距離、相対速度、方位の値を更新し、判定処理部29へ対象物の識別番号を供給する(ステップS106)。
【0075】
次に、判定処理部29は、物標引継ぎ処理部27から入力された対象物が上方構造物かどうか判定し、対象物が上方構造物であるか前方構造物であるかの情報を物標出力処理部30へ供給する(ステップS107)。
【0076】
次に、物標出力処理部30は、対象物が前方構造物である場合に、その対象物の識別番号を物標として供給する(ステップS108)。物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが前方構造物である場合、自車の車線上にある対象物の識別番号を物標として供給する。また、物標出力処理部30は、複数の対象物の判定結果を受け取り、そのどちらもが前方構造物の場合であって、2つ以上の対象物が自車の車線上にある場合、記憶部21から読み出した物標引継ぎ処理回数が多い対象物の識別番号を物標として供給する。
【0077】
<上方構造物の判別アルゴリズム>
次に、判定処理部29における、上方構造物の判別アルゴリズムを説明する。通常、電磁波が強く反射される構造物の条件として、十分に広い反射断面積を有すること、反射損失の少ない物体(あるいは導体)であること、反射面が平坦(つまり、反射以外の散乱が少ない)であること、反射面がアンテナの光軸に対して垂直を成すことあるいは反射面がコーナーリフレクタ構造を有すること、等が挙げられる。
【0078】
これらの条件を考慮して、実際の道路環境を想定すると、高架橋、スノーシェルター、土石シェルター等の構造物が適合する。特に、高架橋の1つである鋼製脚橋は車両の反射断面積よりも十分に広くかつ平面である。また、鋼製脚橋は素材も完全金属体で、さらにコーナーリフレクタ構造を有している。従って、アンテナの光軸上に存在する構造物(以下、光軸上構造物と称する)の1つである前方車両よりもはるかに大きな反射電力レベルP(dz)が観測される場合がある(dzは対象物との水平距離を表す)。
【0079】
図5は、数値シミュレーションに用いた車両と上方構造物の位置関係を示した模式図である。同図において、車両41は、レーダ装置を備えている。h1は、そのレーダ装置のアンテナ光軸の高さである。h2は、対象物42の反射点の高さである。h3は、車両41の車高である。r1は、車両41と上方構造物42との直接距離である。
【0080】
r2は、電波が車両41と上方構造物42との間を間接伝搬するときに、電波が車両と路面との間を進む距離である。r3は、電波が車両41と上方構造物42との間を間接伝搬するときに、電波が路面と上方構造物との間を進む距離である。r4(=r2+r3)は、間接伝搬時の伝搬距離である。
dzは、車両41と上方構造物42との水平距離である。θ1は、間接伝搬の際に、路面と送信電波とが成す角度、または路面と受信電波とが成す角度である。
【0081】
図6は、上方構造物または光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。横軸は図5におけるz軸(アンテナ光軸)方向の距離dz(自車両と検知対象物との水平距離)である。縦軸は、受信電力P(dz)である。本計算におけるアンテナ条件は、メインローブの半値幅が4[deg]、メインローブとサイドローブの受信電力の比が35[dB]である。
【0082】
まず、上方構造物を想定したシミュレーションにより推定された受信電力について説明する。レーダ装置のアンテナ光軸の高さh1と対象物の反射点の高さh2との高低差Δh(=h2−h1)は4.15[m]である。ここで、レーダの設置高は1[m]である。また、上方構造物は高架橋の鉄骨部材を想定して、RCS(Rader Cross Section)は30[dB]である。この値は、後述する前方を走行する車両よりも十分にRCSが広いことを意味する。
【0083】
図6(a)は、上方構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。図6(a)において、シミュレーションにより推定された受信電力曲線51aは、送信波と受信波との位相差を考慮した受信電力の距離に対する関係を表している。受信電力曲線51aは、対象物との距離dzが200[m]より近くなると、検知閾値52aを超える点を有する。また、自由空間伝搬曲線53aは、空間減衰を考慮した場合の理論上の受信電力の距離に対する関係を表している。
【0084】
続いて、光軸上構造物を想定したシミュレーションにより推定された受信電力について説明する。高低差Δh(=h2−h1)は0[m]である。ここで、構造物h2の高さと、レーダの設置高h1はともに1[m]である。また、光軸上構造物は、前方を走行する車両を想定して、RCS(Rader Cross Section、レーダ断面積)は0[dB]である。ここで、RCSとは、レーダの入射方向とレーダの反射する方向が180度反転する場合において、物体が電磁波を散乱する度合いを表す量である。
【0085】
図6(b)は、光軸上構造物を想定したシミュレーションにより推定された受信電力を距離の関数として表した図である。図6(b)において、シミュレーションにより推定された受信電力曲線51bは、送信波と受信波の位相を考慮した受信電力の距離に対する関係を表している。受信電力曲線51bは、対象物との距離dzが160[m]より狭まると、検知閾値52bを超える点を有する。また、自由空間伝搬曲線53bは、空間減衰を考慮した場合の理論上の受信電力の距離に対する関係を表している。
【0086】
ここで、図6(a)の受信電力曲線51aと図6(b)の受信電力曲線51bとを比べる。距離dzが80[m]以上の範囲において、上方構造物のRCSが大きいために、受信電力曲線51aが検知閾値52aをほとんどの部分で超えている。それに対し、光軸上構造物は、RCSが上方構造物のRCSよりも小さいために、受信電力曲線51bが、検知閾値52bを超える部分は、半分程度である。
【0087】
従って、レーダ装置は、対象物との距離に寄らず、上方構造物を検出してしまう。受信電力の大きさだけでは、対象物が上方構造物か光軸上構造物か判定することは困難である。
受信電力の軌跡には、図6で示したように複数の要素が含まれている。さらに、実際にレーダ装置を使用する環境では、マルチパスフェージングによる外来ノイズや回路の内部ノイズ等もランダムに加算されるため、非常に複雑な非線形関数として観測される。レーダは、このような複雑な軌跡から識別に用いられるいくつかの特徴を素早くかつ正確に抽出する必要がある。
【0088】
そこで、判定処理部29は、以下に示す方法のいずれかの方法を用いて、上方構造物を判別する。
<第1の実施形態>
初めに、第1の実施形態における上方構造物の判別方法を説明する。図7は、対象物との距離に対する上方構造物の受信電力と、その極大点を表した図である。同図において、受信電力曲線71の極大点72が、白丸で表示されている。
【0089】
判定処理部29は、電波の伝搬特性を受信電力曲線に対して、距離毎に前後にサンプルした受信電力を比較し、極大点を抽出する。具体的には、判定処理部29は、P(dz,n−1)<P(dz,n)かつP(dz,n+1)<P(dz,n)となる受信電力P(dz,n)を抽出する。ここで、nは受信電力を算出した距離のインデックスを表す正の整数である。
【0090】
極大点の抽出は、以下の3つの理由で、電波伝搬特性を把握する上で有効な手段である。まず1つ目の理由は、極大値は、距離が離れていても、検出閾値を超える値を取るので、出来る限り、遠方から解析処理を開始できることである。
【0091】
2つ目の理由は、対象物が所定の距離にあるときに、その距離付近で取り得る受信電力のうち一番大きい受信電力を取得することができるので、SN(Signal to Noise)比を上げることができることである。これにより、ノイズとなる干渉波による影響を受けにくい。
3つ目の理由は、受信電力を安定して観測できるため、電波伝搬特性が計測器の性能に大きく依存しない点である。
【0092】
次に、代表点抽出部28が、受信電力算出部22が受信電力を算出するサイクルと同じサイクルで、極大点を抽出する手順について説明する。図8は、極大点の抽出処理を示したフローチャートである。まず、代表点抽出部28は、n(nは2以上の正の整数)を2に初期化する(ステップ S202)。次に、代表点抽出部28は、現在のサイクルよりも2つ前の受信電力P(dz,n−1)と、現在のサイクルよりも1つ前のP(dz,n)と、現在の受信電力P(dz,n+1)と、を読み出す(ステップ S202)。ここで、dz,nは、n番目にサンプルした受信電力に対応する距離を表し、nが大きくなるほどその値dz,nは小さくなる。
【0093】
次に、代表点抽出部28は、P(dz,n−1)とP(dz,n)とを比較する(ステップS203)。P(dz,n−1)がP(dz,n)以上の場合(ステップS203 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、P(dz,n−1)がP(dz,n)より小さい場合(ステップS203 YES)、代表点抽出部28は、P(dz,n+1)とP(dz,n)とを比較する(ステップS204)。
【0094】
P(dz,n+1)がP(dz,n)以上の場合(ステップS204 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、P(dz,n+1)がP(dz,n)より小さい場合(ステップS204 YES)、代表点抽出部28は、P(dz,n)を極大値として抽出する(ステップS206)。
【0095】
次に、代表点抽出部28は、全てのnで調べていない場合(ステップS207 NO)、代表点抽出部28は、nを1増やして(ステップS204)、ステップS202の処理に戻る。
一方、代表点抽出部28は、全てのnで調べた場合、極大点の抽出処理を終了する。以上で、本フローチャートは終了する。
【0096】
なお、代表点抽出部28は、極大値ではなく、極小値を抽出してもよい。これによって、距離に対する受信電力曲線は、極大値付近に比べて極小値付近で鋭いピークを有するので、極小値を取る距離をより正確に検出することができる。
その場合、代表点抽出部28は、P(dz,n−1)>P(dz,n)かつP(dz,n+1)>P(dz,n)となる受信電力P(dz,n)を抽出すればよい。
【0097】
続いて、極大値の数を例示するために、光軸上構造物と、上方構造物の高低差を規定し直す。一般的なレーダ設置高から、h1は1[m]である。光軸上構造物の場合、高低差Δhは0[m]である。
一般的に、車両の安全走行が確保された高さは路面から4.5[m]以上である。従って、上方構造物の高さがその高さの最小値である4.5[m]と設定されるので、高低差Δhは3.5[m]である。以上の条件で、それぞれの構造物に対して、受信電力の極大点と、それぞれの極大点の数を算出した例が、図8に示される。
【0098】
図9は、対象物との距離に対する受信電力曲線上に表される受信電力の極大点と、それぞれの極大点の数を表した図である。同図において、光軸上構造物の受信電力曲線81の極大値が白丸で示されている。また、上方構造物の受信電力曲線82の極大値が白丸で示されている。
【0099】
極大点の検出数Kは、光軸上構造物よりも上方構造物の方が多い。ここで、極大値の検出数Kは、距離に対する受信電力が1回振動する毎に1回検出されるので、受信電力の振動数の値は、極大値の検出数Kの値と同一である。従って、極大点の検出数Kは、光軸上構造物よりも上方構造物の方が多いということは、受信電力の振動数が光軸上構造物よりも上方構造物の方が多いことを意味する。
【0100】
図10は、高低差に対する極大値の検出数を表した図である。シミュレーションによって算出された極大値の検出数曲線91から、高低差Δhに対して、極大点の検出数が線形に増加している。すなわち、上方構造物の高さが高くなるほど、極大点の検出数が多くなる関係がある。極大値の検出数曲線91は、線形近似線92によって、線形近似することができる。
【0101】
高低差Δhが3.5[m]の直線93が、極大値の検出数曲線91と交わる点より、高低差Δhが3.5[m]の場合の極大点の検出数K(Δh=3.5)は26である。また、高低差Δhが0[m]の場合の極大点の検出数K(Δh=0)は5である。従って、K(Δh=3.5)−K(Δh=0)≧20である。
【0102】
図11は、極大値の検出数Kと高低差Δhとが関係付けられたテーブルを説明するための図である。同図において、テーブル100は、図9における線形近似線92から、抽出された極大値の検出数Kと高低差Δhとの組み合わせを保持する。これによって、テーブル100は、極大値の検出数Kと高低差Δhとが1対1に関係付ける。
【0103】
記憶部21は、予め極大値の検出数Kと高低差Δhとが関係付けられたテーブル100を保持する。判定処理部29は、対象物の高さh2を推定するために、記憶部21に格納されたテーブル100から極大値の検出数Kに対応する高低差Δhを抽出する。
あるいは、記憶部21は、線形近似線92の式の係数を保持する。判定処理部29は、対象物の高さh2を推定するために、その式の係数を読み出す。そして、判定処理部29は、線形近似線92の式に極大値の検出数Kを代入することによって、高低差Δhを算出する。
【0104】
図12は、極大点の検出数を用いた上方構造物判別処理を示したフローチャートである。また、図12は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS301)。次に、判定処理部29は、その抽出した極大点の検出数Kを算出する(ステップS302)。極大点の検出数Kが所定の閾値Kth以下の場合(ステップS303 NO)、判定処理部29は、対象物を光軸上構造物と判定する。
【0105】
一方、極大点の検出数Kが所定の閾値Kthより大きい場合(ステップS303 YES)、判定処理部29は、対象物を上方構造物と判定する。次に、判定処理部29は、記憶部21に保持されたテーブル100を読み出し、極大点の検出数Kから高低差Δhを抽出する(ステップS306)。次に、判定処理部29は、抽出した高低差Δhにレーダ装置のアンテナ光軸の高さh1を加算して、対象物の高さを算出する(ステップS307)。
【0106】
次に、判定処理部29は、対象物の高さを算出した後に、レーダ装置を搭載した自車両が対象物(例えば、信号機または鉄道高架橋等)に衝突するか否か判定する(ステップS308)。判定処理部29は、記憶部21から予め保存されている自車両の地上からの高さを読み出す。
【0107】
そして、判定処理部29は、読み出した自車両の地上からの高さが算出された対象物の高さ以上の場合(ステップS308 YES)、不図示のスピーカから警報を鳴らすよう制御する(ステップS309)。一方、読み出した自車両の地上からの高さが算出された対象物の高さより低い場合(ステップS308 NO)、判定処理部29は、処理を終了する。以上で、本フローチャートは終了する。
【0108】
以上により、判定処理部29は、対象物の高さと自車両との高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、判定処理部29は、レーダ装置を搭載した車両の運転者に対して、予め対象物と自車両との衝突の危険性を知らせることができる。
【0109】
なお、本フローチャートでは、対象物を上方構造物と判定した場合に、テーブル100から高低差を抽出して、その対象物の高さを推定したが、これに限らず、線形近似線92の式から高低差を算出して、その対象物の高さを推定してもよい。
【0110】
また、本フローチャートでは、対象物を上方構造物と判定した場合に、その対象物の高さを推定したが、これに限らず、対象物を光軸上構造物と判定した場合に、その対象物の高さを推定してもよい。これにより、対象物の高さから、その対象物である車両の種類を推定することができる。
【0111】
また、本フローチャートでは、判定処理部29は、記憶部21から読み出した自車両の地上からの高さが対象物の高さ以上の場合、警報を鳴らすよう制御したが、これに限定するものではない。自車両が積載する荷物の地上からの高さが、自車両の地上からの高さより高い場合には、判定処理部29は、記憶部21から自車両が積載する荷物の地上からの高さを読み出し、自車両が積載する荷物の地上からの高さが対象物の高さ以上の場合、警報を鳴らすよう制御してもよい。
【0112】
また、判定処理部29は、ステップS304において対象物を光軸上構造物と判定した後に、対象物の車種を推定してもよい。具体的には、例えば、判定処理部29が、ステップS306とステップS307と同一の方法で対象物の高さを推定する。そして、判定処理部29は、記憶部21から自車両の地上からの高さを読み出す。
【0113】
そして、判定処理部29は、対象物の高さh2の推定値が2[m]より大きい場合、判定処理部29は、対象物を普通トラックと判定する。一方、対象物の高さh2の推定値が2[m]以下の場合、判定処理部29は、対象物を乗用車と判定する。
【0114】
以上、第1の実施形態によれば、上方構造物の高さが高くなるほど極値の数が多くなる関係をもつことから、上方構造物の高さが高くなるほど、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに対象物を上方構造物と判定することができる。
【0115】
また、計数した極値の数から対象物と受信アンテナの光軸との高さの差を抽出することができるので、上記高さの差から対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0116】
<第2の実施形態>
続いて、第2の実施形態における上方構造物の判別方法を説明する。判定処理部29は、以下に示す第2の実施形態の方法で上方構造物を判別する。図13は、距離に対する受信電力曲線の極大値を繋いだ曲線(以下、極大値曲線と称する)とその極大値曲線の近似直線を示した図である。
【0117】
図13(a)は、図6(a)で例示された上方構造物における距離に対する受信電力の関係を表した曲線の極大値曲線とその極大値曲線の近似直線を示した図である。同図における距離に対する受信電力曲線の極大値曲線131aは、高低差Δhが5.15[m]の上方構造物が存在すると仮定した場合に算出された受信電力から、上記の方法で算出されたものである。
【0118】
1次近似直線132aは、距離に対する受信電力曲線の極大値曲線131aの1次近似直線である。
【0119】
ここで、上記近似直線または上記近似曲線の算出範囲は、距離dzが150[m]から直接波が第1ヌル点になる点135aの距離dnullまでである。第1ヌル点とは、アンテナのメインローブと第1サイドローブとの間の狭間でアンテナの受信感度が0になる仰角である。第1ヌル点は、アンテナの指向性パターンにより決定される点である。
【0120】
図13(b)は、光軸上構造物における距離に対する受信電力の関係を表した曲線の極大値曲線とその極大値曲線の近似直線を示した図である。同図における受信電力の極大値曲線131bは、高低差Δhが0[m]の光軸上構造物が存在すると仮定した場合に算出された受信電力から、上記の方法で算出されたものである。
【0121】
1次近似直線132bは、受信電力の極大値曲線131bの1次近似直線である
ここで、上記近似直線または上記近似曲線の算出範囲は、距離dzが150[m]から第1ヌル点135aの距離dnullまでである。
【0122】
図14は、1次近似直線の1次の係数と高低差との関係を示した図である。折れ線141は、1次近似直線を200[m]の距離から算出した場合における一次近似直線の1次の係数と高低差との関係である。折れ線141は、1次近似直線を150[m]の距離から算出した場合における一次近似直線の1次の係数と高低差との関係である。
【0123】
いずれの折れ線でも、高低差Δhが約2[m]から1次の係数(傾き)αの符号が正に反転している。従って、上方構造物における高低差Δhが3.5[m]以上では、1次の係数(傾き)αの符号は正である。従って、一次近似直線の1次の係数(傾き)αの符号は、上方構造物の判別に利用できる。
【0124】
図15は、1次近似直線の1次の係数を用いた上方構造物の判別処理を示したフローチャートである。また、図15は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS401)。次に、判定処理部29は、その極大点と距離との関係を近似した1次近似式を算出する(ステップS402)。
【0125】
1次の係数αが0よりも大きい場合(ステップS403 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS404)。
一方、1次の係数αが0以下の場合(ステップS403 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS404)。以上で、本フローチャートは終了する。
【0126】
以上、第2の実施形態によれば、距離に対する受信電力の極値を1次関数で近似できるため、1次関数の1次の係数が所定の閾値よりも大きい場合に、対象物を上方構造物と判定することができる。従って、所定の閾値が適切に決定されることにより、スパイクノイズ等による受信電力の変動の影響を受けることなく、ロバストに上方構造物であるか否か判定することができる。
【0127】
<第3の実施形態>
続いて、第3の実施形態における上方構造物の判別方法を説明する。図16は、距離に対する受信電力の極大値曲線と、距離に対する受信電力の1次近似直線と、距離に対する受信電力の3次近似曲線と、各距離における1次近似直線上の電力値と3次近似曲線上の電力値との差分の絶対値を距離が狭まるに連れて加算した値(差分の絶対値の和)Σ|ΔP1(dz)|を距離に対して繋げた曲線とを表した図である。同図において、左側の縦軸は、受信電力の極大値曲線、1次近似直線、および3次近似曲線の受信電力[dBi]を示している。一方、右側の縦軸は差分の絶対値の和Σ|ΔP1(dz)|[dB]を示している。
【0128】
図16(a)は、高低差Δhが4.15[m]の上方構造物において、距離に対する受信電力の極大値曲線161aと、距離に対する受信電力の1次近似直線162aと、距離に対する受信電力の3次近似曲線163aと、各距離における1次近似直線162a上の電力値と3次近似曲線163a上の電力値との差分の絶対値を距離が狭まるに連れて加算した値(差分の絶対値の和)を距離に対して繋げた曲線164aとを表した図である。同図において、距離dzが狭まるにつれて、左肩上がりに差分の絶対値の和164aが大きくなっている。
【0129】
図16(b)は、高低差Δhが0[m]の光軸上構造物において、距離に対する受信電力の極大値曲線161bと、距離に対する受信電力の1次近似直線162bと、距離に対する受信電力の3次近似曲線163bと、各距離における1次近似直線162b上の電力値と3次近似曲線163b上の電力値との差分を距離が狭まるに連れて加算した値(差分の絶対値の和)を距離に対して繋げた曲線164bとを表した図である。同図における差分の絶対値の和164bは、距離dzが狭まっても、上記差分の絶対値の和164aほど大きくはならない。
【0130】
図16(a)で示すように上方構造物の距離150[m]から距離dnullまでの区域では、アンテナ指向性の影響を受けるために、3次関数がその受信電力の極大値曲線に良くフィットする。一方、上記区域における光軸上構造物の受信電力の極大値曲線は、概ね線形関数として扱えるので、1次近似関数がその受信電力の極大値曲線に良くフィットする。
【0131】
以上の特性より、1次近似直線が、光軸上構造物の受信電力の極大値曲線に良くフィットし、1次近似直線が、上方構造物の受信電力の極大値曲線にフィットしないという関係がある。この関係を利用して、判定処理部29は、上方構造物を識別する。
具体的には、判定処理部29は、ある距離において、1次近似式から算出される電力と2次以上の近似式から算出される電力との差ΔP(dz)を用いて、上方構造物を識別する。
【0132】
なお、判定処理部29は、ある距離において、1次近似式から算出される電力と受信電力の極大値曲線から抽出される電力との差を用いて、上方構造物を識別してもよい。
【0133】
ΔP(dz)を用いた識別方法として、その処理に掛かる時間が短いものから順に、以下の3つの方法がある。(1)ΔP(dz)と所定の閾値を超えた場合に上方構造物と判定する方法と、(2)距離毎にΔP(dz)が所定の閾値を超えたか判定し、ΔP(dz)が所定の閾値を超えた回数が所定のカウント閾値を越えた場合に上方構造物と判定する方法と、(3)一次近似式と2次以上の近似式または受信電力の極大値曲線とに囲まれた区間の面積を算出し、算出した面積が所定の面積閾値を超えた場合に、上方構造物と判定する方法とがある。
ここで、上方構造物判別の処理の早さと信頼性とは、トレードオフの関係となる。以下、上記の順番で、具体的に説明する。
【0134】
第1の方法において、判定処理部29は、1次近似式を用いて、予め決められた距離における電力P1を算出する。そして、判定処理部29は、2次以上の近似式または受信電力の極大値曲線を用いて、その同じ距離における電力P3を算出する。そして、判定処理部29は、P1とP3との差ΔPまたはその差ΔPの絶対値を算出する。そして、判定処理部29は、算出されたΔPまたはΔPの絶対値が、所定の閾値を超えた場合に、上方構造物と判定する。
【0135】
第2の方法において、判定処理部29は、予め決められた距離dz毎に、1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差ΔP(dz)またはその差ΔP(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔP(dz)またはその差ΔP(dz)の絶対値が所定の閾値を超える回数を計数する。判定処理部29は、計数した回数が所定のカウント閾値を超えた場合に、上方構造物と判定する。
【0136】
第3の方法において、判定処理部29は、予め決められた距離dz毎に、1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差ΔP(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔP(dz)の和ΣΔP(dz)または差ΔP(dz)の絶対値の和Σ|ΔP(dz)|を算出する。判定処理部29は、算出した和ΣΔP(dz)または和Σ|ΔP(dz)|が所定の和閾値を超えた場合に、上方構造物と判定する。
【0137】
続いて、第3の方法で算出した和ΣΔP(dz)について説明する。判定処理部29は、和ΣΔP(dz)が所定の閾値を超えれば、対象物を上方構造物と判定する。一方、判定処理部29は、和ΣΔP(dz)が所定の閾値以下であれば、対象物を光軸上構造物と判定する。
【0138】
ここで、所定の閾値は、上方構造物として識別する際に最低必要となる高低差Δhと、アンテナ感度の仰角パターンとを用いて決定される。ここで、高低差Δhは、レーダ装置のアンテナ光軸の高さh1と、上方構造物の高さh2とから決定される。従って、所定の閾値は、レーダ装置のアンテナ光軸の高さh1と、上方構造物として識別する際に最低必要となる上方構造物の高さと、アンテナ感度の仰角パターンとを用いて決定される。
【0139】
図17は、1次近似式から算出された電力と3次近似式から算出された電力との差分の絶対値の和を用いた上方構造物の判別処理を示したフローチャートである。また、図17は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS501)。次に、判定処理部29は、その極大点と距離との関係を近似した1次近似直線を算出する(ステップS502)。
【0140】
次に、判定処理部29は、その極大点と距離との関係を近似した3次近似曲線を算出する(ステップS503)。次に、判定処理部29は、予め決められた距離dz毎に、その1次近似式を用いて電力P1(dz)を算出する。そして、判定処理部29は、予め決められた距離dz毎に、その3次近似式を用いて電力P3(dz)を算出する。そして、判定処理部29は、P1(dz)とP3(dz)との差の絶対値|ΔP(dz)|を算出する(ステップS504)。
【0141】
差の絶対値|ΔP(dz)|が所定の閾値Pthを超えた場合(ステップS506 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS507)。
一方、差の絶対値|ΔP(dz)|が所定の閾値Pth以下の場合(ステップS506 NO)、判定処理部29は、対象物を上方構造物と判定する(ステップS508)。以上で、本フローチャートは終了する。
【0142】
以上、第3の実施形態によれば、上方構造物における距離に対する受信電力の極値は1次関数よりも2次以上の関数で良く近似できるため、同距離における1次関数の値と2次以上の関数の値の差が大きくなる。これによって、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0143】
なお、第3の実施形態において、同距離における1次関数の値と2次以上の関数の値の差に基づいて、上方構造物であるか否か判定したが、これに限らず、同距離における1次関数の値と受信された電波の電力または代表点の1つである極大値における電力との差に基づいて、上方構造物であるか否か判定してもよい。
【0144】
<第4の実施形態>
続いて、第4の実施形態における上方構造物の判別方法を説明する。前述したように、一例として対象物に対する距離150[m]付近の受信電力の極大値(以下、初期電力値と称する)から、第1ヌル点または距離40[m]に至るまでの受信電力P(dz)曲線を、光軸上構造物と、上方構造物とで比較する。
【0145】
図18は、距離に対する受信電力の極大値曲線と、その初期電力値を距離に対して繋げた直線と、距離に対する受信電力の極大値の3次近似曲線と、各距離における3次近似曲線上の電力値からその初期電力値を引いた値(差分)ΔP2(dz)を距離に対して繋げた曲線とを表した図である。同図において、左側の縦軸は、受信電力の極大値曲線、初期電力値、および3次近似曲線の受信電力[dBi]を示している。一方、右側の縦軸は、上記差分ΔP2(dz)[dB]を示している。
【0146】
図18(a)は、高低差Δhが4.15[m]の上方構造物の場合における距離に対する受信電力の極大値曲線181aと、その初期電力値を距離に対して繋げた直線182aと、距離に対する受信電力の極大値の3次近似曲線183aと、各距離における3次近似曲線上の電力値からその初期電力値を引いた値を距離に対して繋げた曲線184aとを表した図である。
【0147】
同図において、上方構造物の受信電力P(dz)曲線181aは、距離dzが狭まるに連れて、高次関数で減衰する。すなわちその曲線181aは、左肩下がりである。
曲線184aは、初期電力値から3次近似曲線183a上の電力値を引いた値を、距離dzが狭まるごとに積算したものである。
【0148】
図18(b)は、高低差Δhが0[m]の光軸上構造物の場合における距離に対する受信電力の極大値曲線181bと、その初期電力値を距離に対して繋げた直線182bと、距離に対する受信電力の極大値の3次近似曲線183bと、各距離における3次近似曲線上の電力値からその初期電力値を引いた値を距離に対して繋げた曲線184bとを表した図である。
【0149】
同図において、光軸上構造物の受信電力P(dz)曲線181bは、距離dzが狭まるに連れて、線形に増加する。すなわちその曲線181bは、左肩上がりである。
曲線184bは、初期電力値から3次近似曲線183b上の電力値を引いた値を、距離dzが狭まるごとに積算したものである。
【0150】
従って、判定処理部29は、距離dzが狭まるに連れて、受信電力値の極大値が初期電力値から減少している場合に、対象物を上方構造物と判定することができる。
具体的には、判定処理部29は、初期電力値Psと2次以上の近似式または受信電力の極大値曲線との受信電力の差ΔPs(dz)を用いて、上方構造物を識別する。
【0151】
ΔPs(dz)を用いた識別方法として、その処理に掛かる時間が短いものから順に、以下の3つの方法がある。(1) ΔPs(dz)またはΔPs(dz)の絶対値が、所定の閾値より小さい場合に、上方構造物と判定する方法と、(2)距離毎に差ΔPs(dz)が所定の閾値より下がる回数を計数すし、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する方法と、(3)初期電力値Psと2次以上の近似式または受信電力の極大値曲線とに囲まれた区間の積分値を算出し、積分値が所定の積分閾値より下がった場合に、上方構造物と判定する方法とがある。
ここで、上方構造物判別の処理の早さと信頼性とは、トレードオフの関係となる。以下、上記の順番で、具体的に説明する。
【0152】
第1の方法において、判定処理部29は、2次以上の近似式または受信電力の極大値曲線を用いて、予め決められた距離dzにおける受信電力P4(dz)を算出する。そして、判定処理部29は、初期電力値Psと距離dzにおける受信電力P4(dz)との差ΔPsまたはその差ΔPsの絶対値を算出する。そして、判定処理部29は、算出されたΔPsまたはΔPsの絶対値が、所定の閾値より小さい場合に、上方構造物と判定する。
【0153】
第2の方法において、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P4(dz)を算出する。そして、判定処理部29は、初期電力値PsとP4(dz)との差ΔPs(dz)またはその差ΔPs(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔPs(dz)が所定の閾値より下がる回数を計数する。判定処理部29は、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する。
【0154】
なお、第2の方法において、判定処理部29は、以下のようにして、上方構造物を判定してもよい。判定処理部29は、差ΔPs(dz)の絶対値が所定の閾値を超える回数を計数する。判定処理部29は、計数した回数が所定の第2のカウント閾値を超えた場合に、上方構造物と判定する。
【0155】
第3の方法において、判定処理部29は、予め決められた距離dz毎に、2次以上の近似式または受信電力の極大値曲線を用いて電力P4(dz)を算出する。そして、判定処理部29は、初期電力値PsとP4(dz)との差ΔPs(dz)の絶対値を算出する。
そして、判定処理部29は、差ΔPs(dz)の和ΣΔPs(dz)を算出する。そして、判定処理部29は、算出した和ΣΔPs(dz)が所定の第2の和閾値より下がった場合に、上方構造物と判定する。
【0156】
なお、判定処理部29は、以下のように上方構造物を判定してもよい。判定処理部29は、差ΔPs(dz)の絶対値の和Σ|ΔPs(dz)|を算出する。そして、判定処理部29は、算出した和Σ|ΔPs(dz)|が所定の絶対値和の閾値を超えた場合に、上方構造物と判定する。
【0157】
続いて、第3の方法で算出した和ΣΔPs(dz)について説明する。図19は、初期電力値と受信電力値の極大値との差分の和を、上方構造物と光軸上構造物とで比較した図である。上方構造物における初期電力値と受信電力値の極大値との差分の和を示した曲線184aより、距離dzが100[m]より狭まるに連れて、その和が0から単調減少する。
【0158】
一方、光軸上構造物における初期電力値と受信電力値の極大値との差分の和を示した曲線184bより、距離dzが100[m]より狭まるに連れて、その和が0から単調増加する。
【0159】
従って、所定の閾値を設定すれば、判定処理部29は、上方構造物を判別することができる。所定の閾値は、上方構造物として識別する際に最低必要となる高低差Δhと、アンテナ感度の仰角パターンとを用いて決定される。ここで、高低差Δhは、レーダ装置のアンテナ光軸の高さh1と、上方構造物の高さh2とから決定される。従って、所定の閾値は、レーダ装置のアンテナ光軸の高さh1と、上方構造物として識別する際に最低必要となる上方構造物の高さと、アンテナ感度の仰角パターンとを用いて決定される。
【0160】
図20は、初期電力値と3次近似式から算出された電力との差分の和を用いた上方構造物の判別処理を示したフローチャートである。また、図20は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS601)。次に、判定処理部29は、距離150[m]付近の極大点を初期電力値Psとして抽出する(ステップS602)。
【0161】
次に、判定処理部29は、距離dz毎に、初期電力値Psと受信電力の極大値の差分ΔPs(dz)を算出する(ステップS603)。次に、判定処理部29は、距離dz毎に算出した差分ΔPs(dz)を所定の距離区間(例えば、150[m]から第1ヌル点に対応する距離まで)積算し、その和ΣΔPs(dz)を算出する(ステップS604)。
【0162】
算出した和ΣΔPs(d)が所定の閾値Pth2よりも小さい場合(ステップS605 NO)、判定処理部29は、対象物を上方構造物と判定する(ステップS606)。
一方、算出した和ΣΔPs(dz)が所定の閾値Pth2以上の場合(ステップS607 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS607)。以上で、本フローチャートは終了する。
【0163】
以上、第4の実施形態によれば、所定の距離における2次以上の近似式の値と初期電力値との差を算出することができる。受信アンテナの光軸上に存在する構造物である光軸上構造物の場合、距離が狭まるにつれて初期値から極値が増加するのに対し、上方構造物の場合、距離が狭まるにつれて初期値から極値が減少する。従って、2次以上の近似式の値と初期値との差に基づいて、スパイクノイズ等による受信電力の極値の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0164】
なお、第4の実施形態によれば、所定の距離における2次以上の近似式の値と初期電力値との差を算出したが、これに限らず、所定の距離における代表点の電力と初期電力値との差を算出してもよい。
また、第4の実施形態における初期電力値は一例であり、予め決められた距離における代表点の電力であればよい。
【0165】
<第5の実施形態>
続いて、第5の実施形態における上方構造物の判別方法を説明する。前述した第4の実施形態においては、初期電力値を基準値として、その基準値と受信電力の極大値との差分を用いて、上方構造物を判別した。
第5の実施形態においては、上方構造物と光軸上構造物との差異を明確にするために、レーダ方程式から算出される自由空間伝搬時の受信電力の理論値を基準値として用いる。
レーダ方程式は以下の式(1)で表される。
【0166】
【数1】
【0167】
ここで、Pff,sは自由空間伝搬時の受信電力値、Ptは送信電力値、Gtは、送信アンテナ利得、Grは受信アンテナ利得、σは反射断面積、λはレーダの波長である。反射断面積は、後述する式(2)から算出される。
この式(1)によって、図6(a)に示す自由空間伝搬減衰曲線53aが決定されている。この場合の主な変数は、距離r1のみである。但し、λもドップラー効果により変動するが、自由空間伝搬減衰曲線53aを算出した条件では無視できる範囲である。
【0168】
Pt、GtおよびGrはレーダ使用条件で決定される定数であるので、走行環境条件とは無関係である。よって、理論上の自由空間伝搬時の受信電力値Pff,sの距離に対する軌跡(すなわち自由空間伝搬減衰曲線)のカーブ形状は固有である。そして、その軌跡は、走行環境条件(反射条件)で変動する反射断面積σの決定によって、受信電力値の軸(縦軸)方向に移動する。
【0169】
判定処理部29が、受信電力の極大値の初期値(例えば、距離150[m]付近の受信電力の極大値)を算出する。ここで、反射断面積σは下記の式(2)から算出される。
【0170】
【数2】
【0171】
ここで、P’ff,sは、推定減衰電力値であり、Lθ1は間接波成分の減衰量である。推定減衰電力値P’ff,sは、対象物の観測距離において、間接波成分の減衰による振幅の減衰を考慮した受信電力の推定値である。判定処理部29は、推定減衰電力値P’ff,sとして、距離に対する受信電力の関係を表す曲線における極大値を用いて、反射断面積σを算出する。
【0172】
ここで、距離に対する受信電力の関係を表す曲線における極大値は、直接波と間接波の位相が揃うことにより、受信電力が強めあうことにより形成される。従って、その極大値は、スパイクノイズ等により影響されにくいので、推定減衰電力値P’ff,sとして用いた場合に、反射断面積σを精度良く推定できる。
【0173】
なお、アンテナの仕様が既知であれば、距離r1に対する振幅減衰量の理論値を算出することができるので、対象物の観測距離に対する振幅減衰量の理論値をP’ff,sとして用いてもよい。
【0174】
判定処理部29は、推定減衰電力値P’ff,sに受信電力の極大値の初期値を代入して、反射断面積σを算出する。そして、判定処理部29は、算出した反射断面積σをレーダ方程式(1)に代入することにより、自由空間伝搬時の受信電力値Pff,sを推定した値である予測の自由空間減衰値(電力の推定値)を算出する。
【0175】
対象物が光軸上構造物の場合、受信アンテナは、対象物に反射した電波の直接波成分をメインローブで受信することができる。従って、自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値とは近い値となる。
一方、対象物が上方構造物である場合には、アンテナ指向性の影響により、上記と同様の方法で算出した自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値とは全く異なった値となる。
以上より、判定処理部29は、自由空間伝搬時の受信電力値Pff,sと実際に観測される受信電力値との差を用いて、対象物が上方構造物であるか否かを判定する。
【0176】
従って、判定処理部29は、自由空間伝搬時の受信電力値Pff,sと受信電力の極大値の差ΔPff(dz)を用いて、上方構造物を識別する。
具体的には、判定処理部29は、最初の受信電力の極大値(例えば、距離150[m]付近の受信電力の極大値)を初期値として抽出する。この受信電力の極大値は、推定減衰電力値P’ff,sを精度良く推定できる値である。
【0177】
さらに、推定精度を高めるために、間接波成分の減衰による受信電力の減少分を考慮してもよい。また、アンテナの仕様が既知であれば、距離dzに対する上記受信電力の減少量の理論値を算出することができるので、その理論値を推定減衰電力値P’ff,sに適用してもよい。
【0178】
図21は、予測の自由空間伝搬曲線と自由空間伝搬減衰曲線の理論値との比較を説明するための図である。図21(a)は、高低差Δhが4.15[m]である上方構造物における予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。同図において、受信電力値を距離に対して表した曲線211aと、その受信電力値の極大値を距離に対して表した曲線212aが示されている。
【0179】
また、150[m]付近の受信電力値の極大値213aから反射損出を考慮して、6[dB]減少させた値を推定減衰電力値P’ff,sとして算出された予測の自由空間伝搬曲線214aが示されている。また、予測の自由空間伝搬曲線214aは、自由空間伝搬減衰曲線215aと良くフィットしている。
【0180】
図21(b)は、高低差Δhが0[m]である光軸上構造物における予測の自由空間伝搬曲線と理論上の自由空間伝搬減衰曲線との比較を説明するための図である。同図において、受信電力値を距離に対して表した曲線211bと、その受信電力値の極大値を距離に対して表した曲線212bが示されている。
【0181】
また、150[m]付近の受信電力値の極大値213bから反射損出を考慮して、6[dB]減少させた値を推定減衰電力値P’ff,sとして算出された予測の自由空間伝搬曲線214bが示されている。また、予測の自由空間伝搬曲線214bは、自由空間伝搬減衰曲線215bより大きな電力値を取る曲線である。
【0182】
図22は、予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を距離dzに対して示した図である。同図において、上方構造物の場合、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が、対象物との距離dzが狭まるに連れて単調減少する。また、その値は、対象物との距離が100[m]より狭い場合に、0より小さい。
一方、光軸上構造物の場合、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が、対象物との距離dzが狭まるに連れて単調減少する。しかし、その値は、距離40[m]から150[m]の範囲内で0以上である。
【0183】
従って、判定処理部29は、所定の距離の範囲(例えば、距離40[m]から100[m]までの範囲)において、予測の自由空間伝搬曲線上の点と受信電力の極大値との差分が0よりも小さい場合、対象物を上方構造物と判定する。
【0184】
図23は、予測の自由空間減衰値(電力の推定値)と受信電力の極大値との差分を用いた上方構造物の判別処理を示したフローチャートである。また、図23は図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大点を抽出する(ステップS701)。次に、判定処理部29は、所定の距離(たとえば、距離150[m])付近の受信電力値の極大値を抽出する。そして、判定処理部29は、電波の反射損出を考慮して、その極大値から所定の値(例えば、6[dB])を引いた電力値を推定減衰電力値P’ff,sとして算出する(ステップS702)。
【0185】
次に、判定処理部29は、算出した推定減衰電力値P’ff,sを式(2)に代入して、反射断面積σを算出する(ステップS703)。判定処理部29は、算出した反射断面積σを式(1)に代入して、予測の自由空間減衰値(電力の推定値)を算出する(ステップS704)。次に、判定処理部29は、距離ごとに受信電力の極大値と予測の自由空間減衰値(電力の推定値)との差ΔPff(dz)を算出する(ステップS705)。
【0186】
距離ごとに算出された差ΔPff(dz)が所定の回数以上連続して0より小さい場合(ステップS706 YES)、判定処理部29は、対象物を上方構造物と判定する(ステップS707)。一方、距離ごとに算出された差ΔPff(dz)が、所定の回数以上連続して0以上の場合(ステップS706 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS707)。以上で、本フローチャートは終了する。
【0187】
以上、第5の実施形態によれば、所定の距離における極値と電力の推定値との差を算出することができる。光軸上構造物の場合、極値が電力の推定値よりも大きいのに対し、上方構造物の場合、極値が電力の推定値よりも小さい。従って、極値と電力の推定値との差に基づいて、スパイクノイズ等による受信電力の変動の影響を受けることなくロバストに上方構造物であるか否か判定することができる。
【0188】
なお、第5の実施形態では上方構造物の判定にあたり、所定の距離における極値と電力の推定値との差を算出したが、これに限らず、所定の距離における受信された電力と電力の推定値との差を算出してもよいし、所定の距離における代表点の電力と推定値との差を算出してもよい。
【0189】
<第6の実施形態>
続いて、第6の実施形態における上方構造物の判別方法を説明する。図24は、直接波成分の第1ヌル点を用いた上方向構造物の識別方法を説明するための図である。図24(a)は、高低差Δhが4.15[m]の上方構造物における受信電力を距離に対する関係を示した図である。同図において、受信電力の極大値曲線242aは、受信電力曲線241aの極大値が滑らかに繋がれた曲線である。
【0190】
区域243、区域244および区域245の受信電力の極大値曲線242aの軌跡は、区域244を中心としたお椀型の軌跡となる。この軌跡は、以下の3つの要因で形成される。
第1に、区域243における距離が狭まることによる受信電力の極大値の減衰するのは、距離が狭まるに連れて直接波の到来角度が大きくなることにより、直接波を受けるアンテナ感度のメインローブにおける減衰が生じるからである。
【0191】
第2に、区域244において受信電力の極大値曲線242aが極小値を取るのは、その距離において直接波の到来角度が、アンテナの第1ヌル点に相当する仰角になることにより、直接波を受けるアンテナ感度が最も小さくなるからである。
第3に、区域245において距離が狭まることによる受信電力の極大値の上昇するのは、距離が狭まるに連れて直接波の到来角度が大きくなることにより、直接波を受けるアンテナ感度の第1サイドローブにおける上昇が生じるからである。
【0192】
2次近似曲線246は、区域243、区域244および区域245の受信電力の極大値曲線242aの軌跡に良くフィットする。従って、区域243、区域244および区域245が存在するならば、受信電力の極大値曲線242aは、区域244の近辺に極小値がある2次近似曲線で近似されうる。
【0193】
図24(b)は、高低差Δhが0[m]の光軸上構造物における受信電力を距離に対して示した図である。同図において、受信電力の極大値曲線242bは、受信電力曲線241bの極大値が滑らかに繋がれた曲線である。
上方構造物と異なり、光軸上構造物の受信電力の極大値曲線242bには、アンテナ指向性と直接波の到来角度の変化とが無いため、その軌跡にお椀方の軌跡は存在しない。
【0194】
従って、判定処理部29は、受信電力の極大値曲線242bに現れるお椀方の軌跡の存在する場合には、対象物を上方構造物と判定する。
具体的には、判定処理部29は、受信電力から受信電力の極大値Pmaxを算出する。
そして、判定処理部29は、算出された受信電力の極大値Pmax,iから(iは正の整数で、遠方からiをカウントする)、所定の距離区間(例えば、距離40[m]から60[m]の区間)で観測される受信電力の極大値Pmax,iの最小値Pmax,mを抽出する(mは正の整数)。
【0195】
そして、判定処理部29は、以下の式(3)と式(4)を両方満たすときに、対象物を上方構造物と判定する。
Pmax,m−3>Pmax,m−2>Pmax,m−1>Pmax,m …(3)
Pmax,m+3>Pmax,m+2>Pmax,m+1>Pmax,m …(4)
一方、上記式を満たさない場合、判定処理部29は、対象物を光軸上構造物と判定する。
【0196】
このように、判定処理部29は、連続する大小関係が成立することによって、上方構造物を識別することができる。さらに、判定処理部29は、アンテナの仕様と高低差Δhが既知である場合は、受信電力の極大値の最小値Pmax,mの観測距離と区域244の距離の理論値を照合することにより、高低差Δhを推定する。
【0197】
図25は、距離に対する受信電力の極大値の変化に極小値が存在するか否かを判別することによる上方構造物の判別処理を示したフローチャートである。また、25は、図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大値Pmax,iを算出する(ステップS801)。距離検出部24により検出された対象物との距離が所定の距離よりも小さい場合(例えば、距離が45[m]より小さい場合)、判定処理部29は、受信電力の極大値Pmax,iの中から最小値Pmax,mを抽出する(ステップS802)。
【0198】
次に、判定処理部29は、式(3)が成立するか否か判定する(ステップS803)。式(3)が成立しない場合(ステップS803 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS806)。一方、式(3)が成立する場合(ステップS803 YES)、判定処理部29は、式(4)が成立するか否か判定する(ステップS804)。
【0199】
式(4)が成立しない場合(ステップS804 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS806)。一方、式(4)が成立する場合判定処理部29は、対象物を上方構造物と判定する(ステップS805)。以上で、本フローチャートは終了する。
【0200】
以上、第6の実施形態によれば、予め決められた所定の距離の範囲で、距離に対する代表値の軌跡が下に凸であれば、対象物を上方構造物であると判定することができる。光軸上構造物の場合、距離に対する極値の関数が極小値を取らないのに対し、上方構造物の場合、距離に対する極値の関数が極小値を取る。従って、距離に対する極値の関数が極小値を取るか否かに基づいて、上方構造物であるか否か判定することができる。
【0201】
なお、第6の実施形態では、予め決められた所定の距離の範囲で、距離に対する代表値の軌跡が下に凸であれば、対象物を上方構造物であると判定したが、これに限らず、予め決められた所定の距離の範囲で、距離に対する極値の関数が極小値を取る場合、対象物を上方構造物であると判定してもよい。
【0202】
<第7の実施形態>
続いて、第7の実施形態における上方構造物の判別方法を説明する。第6の実施形態では、下記の2つの要因により、受信電力の極大値の中から最小値を抽出する際に、識別精度が悪くなる問題がある。第1の要因は、スパイクノイズ等による受信電力の極大値の変動である。第2の要因は、レーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れである。第7の実施形態では、この問題を解決するために、改良した上方構造物の判別方法を説明する。
【0203】
判定処理部29は、区域244を中心に、区域243と区域245の幾つかの受信電力の極大値Pmaxを用いて、最小二乗法により2次近似式を算出する。ここで、その2次近似式は下記の式(5)で表される。
【0204】
【数3】
【0205】
ここで、Pmax(dz)は、距離dzにおける受信電力の極大値であり、aは2次の係数であり、bは1次の係数であり、cは定数である。このとき、受信電力の極大値Pmax(dz)が極小値をとる距離dlmを算出するために上記の式(5)を変形すると、下記の式(6)で表される。
【0206】
【数4】
【0207】
従って、受信電力の極大値Pmax(dz)が極小値をとる距離dlmは、以下の式(7)で表される。
【0208】
【数5】
【0209】
判定処理部29は、式(7)を用いて、受信電力の極大値Pmax(dz)が極小値をとる距離dlmを算出する。判定処理部29は、式(7)で算出された極小値をとる距離dlmが距離40[m]以上で、かつ150[m]以下の場合、対象物を上方構造物と判定する。
第7の実施形態の方法により、受信電力の極大値の中から最小値を算出する際に、2次関数で近似することによって、上記識別精度が悪くなる問題を解決することができる。
【0210】
具体的には、スパイクノイズ等による受信電力の極大値の変動があっても、距離に対する受信電力の極大値の関係を2次関数で近似することができる。これによって、スパイクノイズ等による受信電力の極大値の変動があっても、ロバストに受信電力の極大値の中から最小値を抽出することができる。
【0211】
また、レーダ装置のサンプリング周波数が低いことによる受信電力値に取得漏れがあっても、距離に対する受信電力の極大値の関係を2次関数で近似することができる。これによって、受信電力値に取得漏れがあっても、ロバストに受信電力の極大値の中から最小値を抽出することができる。
【0212】
図26は、高低差Δh毎に2次近似式により算出された極小値をとる距離と、高低差Δh毎に算出された第1ヌル点に対応する距離の理論値との比較を説明するための図である。同図において、曲線261は、高低差Δh毎に2次近似式により算出された極小値をとる距離を滑らかに繋いだ曲線である。曲線262は、第1ヌル点に対応する距離の理論値を滑らかに繋いだ曲線である。
【0213】
同図において、曲線262の高低差Δhは第1ヌル点に対応する距離の理論値に対して線形に変化する。ここで、曲線261と、曲線262とは良好に一致している。従って、第1ヌル点に対応する距離の理論値と高低差Δhとの関係を用いて、2次近似式により算出された極小値をとる距離から高低差Δhを推定することができる。
【0214】
図27は、第1ヌル点に対応する距離の理論値と高低差Δhとが関係付けたテーブルである。同図のテーブル270において、第1ヌル点に対応する距離の理論値と高低差Δhとが1対1で関係付けられている。
記憶部21は、極小値を取る距離dlmと高低差Δhとが関係付けたテーブル270を保持する。
【0215】
従って、判定処理部29は、記憶部21に格納されたテーブル270から2次近似式により算出された極小値に対応する高低差Δhを抽出する。これによって、判定処理部29は、対象物の高低差Δhを推定することができる。
【0216】
図28は、2次近似式により算出された極小値をとる距離を用いた上方構造物の判別処理を示したフローチャートである。また、図28は、図4のステップS107の上方構造物判別処理の詳細の1例を示したフローチャートである。
まず、代表点抽出部28は、図8に示したフローチャートの手順で距離に対する受信電力の関係から、所定のサイクルで順次極大値Pmax,iを算出する(ステップS901)。距離検出部24により検出された対象物との距離が所定の距離よりも狭まった場合(例えば、距離が45[m]より狭まった場合)、判定処理部29は、その距離に対する受信電力値の極大値の曲線から、2次の近似関数を算出する距離区間を決定する(ステップS902)。
【0217】
次に、判定処理部29は、算出した距離区間において、最小二乗法を用いて距離に対する電力値の極大値の2次の近似関数を算出する(ステップS903)。次に、判定処理部29は、算出した2次の近似関数から式(7)を用いて、極小値をとる距離dlmを算出する(ステップS904)。
【0218】
判定処理部29が、極小値をとる距離dlmが検知できない場合(ステップS905 NO)、判定処理部29は、対象物を光軸上構造物と判定する(ステップS906)。
一方、判定処理部29が、極小値をとる距離dlmが検知できる場合(ステップS905 YES)、判定処理部29は、極小値をとる距離dlmと距離40[m]とを比較する(ステップS907)。
【0219】
極小値をとる距離dlmが40[m]以上であれば(ステップS907 YES)、テーブル270から高低差Δhが3.5[m]以上あるので、判定処理部29は、対象物を上方構造物と判定する(ステップS908)。
一方、極小値をとる距離dlmが40[m]未満であれば(ステップS907 NO)、テーブル270から高低差Δhが3.5[m]未満なので、判定処理部29は、対象物を光軸上構造物と判定する(ステップS909)。
【0220】
判定処理部29は、記憶部21に格納されたテーブル270から、極小値をとる距離dlmに対応する高低差Δhを抽出する(ステップS910)。判定処理部29は、算出された高低差Δhにそのレーダ装置のアンテナ光軸の高さh1を加算して、対象物の高さh2の推定値を算出する(ステップS911)。
【0221】
対象物の高さh2の推定値が2[m]より大きい場合(ステップS912 YES)、判定処理部29は、対象物を普通トラックと判定する(ステップS913)。一方、対象物の高さh2の推定値が2[m]以下の場合(ステップS912 NO)、判定処理部29は、対象物を乗用車と判定する(ステップS914)。以上で、本フローチャートは終了する。
【0222】
なお、本フローチャートでは、対象物を光軸上構造物と判定した場合に、テーブル270から高低差を抽出して、その対象物の高さを推定したが、これに限らず、対象物を上方構造物と判定した場合に、テーブル270から高低差を抽出して、その対象物の高さを推定してもよい。
【0223】
また、判定処理部29は、ステップS908において対象物を上方構造物と判定した後に、自車両が対象物と衝突するか否か判定してもよい。具体的には、例えば、判定処理部29が、ステップS910とステップS911と同一の方法で対象物の高さを推定する。そして、判定処理部29は、記憶部21から自車両の地上からの高さを読み出す。そして、判定処理部29は、読み出した自車両の地上からの高さが算出された対象物の高さ以上の場合、不図示のスピーカから警報を鳴らすよう制御する。
これにより、判定処理部29は、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。
【0224】
また、第7の実施形態では、記憶部21に格納されたテーブル270から高低差Δhを抽出したが、これに限らず、下記の方法によって、高低差Δhを算出してもよい。
記憶部21が、アンテナ感度の仰角パターンによって第1ヌルの仰角度θと極小値を取る距離dlmとを関連付けたテーブルを予め保持する。判定処理部29は、記憶部21に格納されたそのテーブルから極小値を取る距離dlmに対応する第1ヌルの仰角度θを抽出する。そして、判定処理部29は、極小値を取る距離dlmにtanθを乗じることにより高低差Δhを算出する。
【0225】
以上、第7の実施形態によれば、所定の距離区間における距離に対する極値の関数を2次関数で近似し、2次関数の極小値を取る距離を算出し、その距離に基づいて対象物を上方構造物であるか否か判定することができる。従って、スパイクノイズ等による受信電力の変動の影響またはレーダ装置のサンプリング周波数が低いことによる受信電力値の取得漏れの影響を受けることなく、ロバストに上方構造物であるか否か判定することができる。
【0226】
また、記憶部から極小値を取る距離に対応する高さの差を抽出することができるので、その高さの差を用いて対象物の高さを算出することができる。従って、対象物が上方構造物である場合、対象物の高さと自車両の地上からの高さとを比較することにより、自車両が対象物と衝突するか否か判定することができる。これにより、予め対象物とレーダ装置を搭載した自車両との衝突の危険性を、予め自車両の運転者へ知らせることができる。一方、対象物が上方構造物でない場合、算出した対象物の高さから、対象物である車両の種類を推定することができる。
【0227】
なお、第7の実施形態では、所定の距離において、距離に対する複数の代表点の電力を2次関数で近似し、2次関数が極小値を取る距離を算出し、極小値を取る距離に基づいて、対象物を上方構造物であるか否か判定したが、これに限定されるものではない。2次関数が最小値を取る距離を算出し、最小値を取る距離が所定の距離の範囲内で一番遠くない場合に、対象物を上方構造物であると判定してもよい。
また、所定の距離の範囲における複数の代表点を距離の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定してもよい。
【0228】
以上により、第1の実施形態から第7の実施形態までのそれぞれの方法によって、判定処理部29は、対象物を上方構造物であるか否か判定することができる。また、第1の実施形態から第7の実施形態までの方法のうち、2個以上の方法の条件を満たすことによってのみ、上方構造物と判定してもよい。
【0229】
例えば、第1の実施形態で示す距離に対する受信電力曲線の極大値の数が所定の閾値を越えて、かつ第2の実施形態で示す距離に対する受信電力曲線の極大値の1次近似式の係数が0より大きいときに、対象物を上方構造物と判定してもよい。
これによって、精度を上げて、対象物を上方構造物であるか否か判定することができる。
【0230】
なお、本発明の各実施形態では、受信電力算出部22は、検出された距離の関数として受信電力を算出したが、これに限らず、受信電力算出部22が、時間の関数として受信された電波の電力を算出してもよいし、また受信された電波の電力を所定の時間間隔または距離間隔で電波を取得した際の取得回数に対する関数として算出してもよい。
例えば、対象物が止まっている場合、時間が経つとともに、レーダと対象物との距離が縮まる。これにより、受信電力を時間の関数と表した場合でも、判定処理部29は、対象物を上方構造物であるか否か判定することができる。
【0231】
また、ADC(受信波取得部)7が、受信された電波を所定の時間間隔で取得した回数(サンプル数)を計数し、受信電力算出部22が、その回数の関数として受信された電波の電力を算出してもよい。
【0232】
さらに、本発明の各実施形態では、ADC(受信波取得部)7が、所定のサンプリング周波数で、ミキシングされた受信波をデジタル信号へ変換したが、これに限ったものではない。他の受信波取得部が、所定の時間間隔で、受信アンテナで受信された電波を取得してもよい。その場合、受信電力算出部22は、その取得回数の関数として受信された電波の電力を算出してもよい。
【0233】
また、本発明の各実施形態では、受信電力の距離に対する変化を表す曲線上に現れる極大値を用いたが、これに限らず、受信電力の距離に対する変化を表す曲線上に現れる極小値を用いてもよい。極小値前後の受信電力曲線は、極大値前後の受信電力曲線よりも、距離に対して急峻に変化しているので、極小値を用いる場合、極大値を用いる場合よりも、受信電力の極値における距離を正確に算出することができる。
【0234】
また、本発明の各実施形態では、電子走査型レーダ装置を用いて説明したが、これに限らず、機械操作式レーダ装置であってもよい。機械操作式レーダ装置を用いた時の受信電力の距離に対する変化は、電子走査型レーダ装置を用いた時の受信電力の距離に対する変化と、等価なものだからである。
【0235】
また、本発明の各実施形態である信号処理部20の機能またはその機能の一部をコンピュータで実現するようにしてもよい。この場合、その機能を実現するためのコンピュータプログラムをコンピュータ読み取り可能な記録媒体に記録して、この記録媒体に記録されたコンピュータプログラムをコンピュータシステムに読み込ませ、実行することによって実現してもよい。なお、ここでいう「コンピュータシステム」とは、OS(Operating System)や周辺機器のハードウェアを含むものとする。また、「コンピュータ読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、光ディスク、メモリカード等の可搬型記録媒体、コンピュータシステムに内蔵されるハードディスク等の記憶装置のことをいう。さらに「コンピュータ読み取り可能な記録媒体」とは、インターネット等のネットワークや電話回線等の通信回線を介してプログラムを送信する場合の通信線のように、短時間の間、動的にプログラムを保持するもの、その場合のサーバーやクライアントとなるコンピュータシステム内部の揮発性メモリのように、一定期間プログラムを保持するものを含んでもよい。また上記のコンピュータプログラムは、前述した機能の一部を実現するためのものであってもよく、さらに前述した機能をコンピュータシステムにすでに記録されているコンピュータプログラムとの組み合わせにより実現するものであってもよい。
【0236】
以上、本発明の各実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の設計等も含まれる。
【符号の説明】
【0237】
11、1n 受信アンテナ
21、2n ミキサ
3 送信アンテナ
4 分配器
51、5n フィルタ
6 SW
7 ADC(受信波取得部)
8 制御部
9 三角波生成部
10 VOC
20 信号処理部
21 記憶部
22 受信電力算出部
23 DBF処理部
24 距離検出部
25 速度検出部
26 方位検出部
27 物標引継ぎ処理部
28 代表点抽出部
29 判定処理部
30 物標出力処理部
【特許請求の範囲】
【請求項1】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
前記受信された電波を所定の時間間隔で取得する受信波取得部と、
前記受信波取得部の取得回数の関数として、前記受信された電波の電力を算出する受信電力算出部と、
前記関数から複数の代表点を抽出する代表点抽出部と、
前記代表点に基づいて前記対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記代表点抽出部は、前記関数の極値を取る点を抽出し、
前記判定処理部は、前記極値に基づいて前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記判定処理部は、前記極値の数を計数し、前記極値の数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする請求項2に記載のレーダ装置。
【請求項4】
極値の数と、前記対象物と前記受信アンテナの光軸との高さの差を関係づけて記憶する記憶部を更に備え、
前記判定処理部は、前記記憶部から前記計数した極値の数に対応する前記高さの差を抽出することを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、前記近似関数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項6】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記1次関数の1次の係数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする請求項5に記載のレーダ装置。
【請求項7】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、所定の前記取得回数における前記1次関数の値と前記受信された電波の電力または前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項5に記載のレーダ装置。
【請求項8】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記取得回数と前記代表点における電力の関係を2次以上の関数で近似し、所定の前記取得回数における前記1次関数の値と前記2次以上の関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項5に記載のレーダ装置。
【請求項9】
前記判定処理部は、予め決められた前記取得回数における前記代表点の電力に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項10】
前記判定処理部は、前記予め決められた前記取得回数における前記代表点における電力と所定の前記取得回数における前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項9に記載のレーダ装置。
【請求項11】
前記判定処理部は、前記取得回数と前記代表点の電力の関係を2次以上の関数で近似し、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記2次以上の関数の値とを算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項9に記載のレーダ装置。
【請求項12】
前記判定処理部は、前記代表点における電力に基づいて前記対象物の反射断面積を算出し、前記反射断面積に基づいて、所定の前記取得回数における前記受信された電波の電力の推定値を算出し、前記推定値に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項13】
前記判定処理部は、所定の前記取得回数における前記電力の推定値と前記取得回数における前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項12に記載のレーダ装置。
【請求項14】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項12に記載のレーダ装置。
【請求項15】
前記代表点抽出部は、所定の前記取得回数の範囲における前記受信された電波の電力から複数の代表点を抽出し、
前記判定処理部は、前記所定の取得回数における前記複数の代表点に基づいて前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項16】
前記判定処理部は、前記所定の取得回数において前記取得回数に対する前記複数の代表点の軌跡が下に凸であれば、前記対象物を前記上方構造物であると判定することを特徴とする請求項15に記載のレーダ装置。
【請求項17】
前記判定処理部は、前記所定の取得回数において前記複数の代表点を前記取得回数の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定することを特徴とする請求項15に記載のレーダ装置。
【請求項18】
前記判定処理部は、前記所定の取得回数において前記取得回数に対する前記複数の代表点の電力を2次関数で近似し、前記2次関数が極小値または最小値を取る取得回数を算出し、前記極小値または前記最小値を取る取得回数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項15に記載のレーダ装置。
【請求項19】
前記取得回数と、前記対象物と前記受信アンテナの光軸との高さの差とを関係づけて記憶する記憶部を更に備え、
前記判定処理部は、前記記憶部から前記極小値または前記最小値を取る取得回数に対応する前記高さの差を抽出することを特徴とする請求項18に記載のレーダ装置。
【請求項20】
受信アンテナにより受信された電波を所定の時間間隔で取得を行う第1のステップと、
前記取得の回数の関数として、前記受信された電波の電力を算出する第2のステップと、
前記関数から複数の代表点を抽出する第3のステップと、
前記代表点に基づいて前記対象物を前記受信アンテナの光軸より上方にある上方構造物であるか否か判定する第4のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【請求項1】
電波を送信する送信アンテナと、
前記送信された電波が対象物により反射された電波を受信する受信アンテナと、
前記受信された電波を所定の時間間隔で取得する受信波取得部と、
前記受信波取得部の取得回数の関数として、前記受信された電波の電力を算出する受信電力算出部と、
前記関数から複数の代表点を抽出する代表点抽出部と、
前記代表点に基づいて前記対象物を前記受信アンテナの光軸より高い位置にある上方構造物であるか否か判定する判定処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記代表点抽出部は、前記関数の極値を取る点を抽出し、
前記判定処理部は、前記極値に基づいて前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記判定処理部は、前記極値の数を計数し、前記極値の数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする請求項2に記載のレーダ装置。
【請求項4】
極値の数と、前記対象物と前記受信アンテナの光軸との高さの差を関係づけて記憶する記憶部を更に備え、
前記判定処理部は、前記記憶部から前記計数した極値の数に対応する前記高さの差を抽出することを特徴とする請求項3に記載のレーダ装置。
【請求項5】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、前記近似関数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項6】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記1次関数の1次の係数が所定の閾値を越えた場合、前記対象物を前記上方構造物と判定することを特徴とする請求項5に記載のレーダ装置。
【請求項7】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、所定の前記取得回数における前記1次関数の値と前記受信された電波の電力または前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項5に記載のレーダ装置。
【請求項8】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を1次関数で近似し、前記取得回数と前記代表点における電力の関係を2次以上の関数で近似し、所定の前記取得回数における前記1次関数の値と前記2次以上の関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項5に記載のレーダ装置。
【請求項9】
前記判定処理部は、予め決められた前記取得回数における前記代表点の電力に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項10】
前記判定処理部は、前記予め決められた前記取得回数における前記代表点における電力と所定の前記取得回数における前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項9に記載のレーダ装置。
【請求項11】
前記判定処理部は、前記取得回数と前記代表点の電力の関係を2次以上の関数で近似し、前記予め決められた前記取得回数における前記代表点の電力と所定の前記取得回数における前記2次以上の関数の値とを算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項9に記載のレーダ装置。
【請求項12】
前記判定処理部は、前記代表点における電力に基づいて前記対象物の反射断面積を算出し、前記反射断面積に基づいて、所定の前記取得回数における前記受信された電波の電力の推定値を算出し、前記推定値に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項13】
前記判定処理部は、所定の前記取得回数における前記電力の推定値と前記取得回数における前記代表点における電力との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項12に記載のレーダ装置。
【請求項14】
前記判定処理部は、前記取得回数と前記代表点における電力の関係を近似した近似関数を算出し、所定の前記取得回数における前記電力の推定値と前記近似関数の値との差を算出し、前記差に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項12に記載のレーダ装置。
【請求項15】
前記代表点抽出部は、所定の前記取得回数の範囲における前記受信された電波の電力から複数の代表点を抽出し、
前記判定処理部は、前記所定の取得回数における前記複数の代表点に基づいて前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項1に記載のレーダ装置。
【請求項16】
前記判定処理部は、前記所定の取得回数において前記取得回数に対する前記複数の代表点の軌跡が下に凸であれば、前記対象物を前記上方構造物であると判定することを特徴とする請求項15に記載のレーダ装置。
【請求項17】
前記判定処理部は、前記所定の取得回数において前記複数の代表点を前記取得回数の順に繋いだ曲線に極小値がある場合、前記対象物を前記上方構造物であると判定することを特徴とする請求項15に記載のレーダ装置。
【請求項18】
前記判定処理部は、前記所定の取得回数において前記取得回数に対する前記複数の代表点の電力を2次関数で近似し、前記2次関数が極小値または最小値を取る取得回数を算出し、前記極小値または前記最小値を取る取得回数に基づいて、前記対象物を前記上方構造物であるか否か判定することを特徴とする請求項15に記載のレーダ装置。
【請求項19】
前記取得回数と、前記対象物と前記受信アンテナの光軸との高さの差とを関係づけて記憶する記憶部を更に備え、
前記判定処理部は、前記記憶部から前記極小値または前記最小値を取る取得回数に対応する前記高さの差を抽出することを特徴とする請求項18に記載のレーダ装置。
【請求項20】
受信アンテナにより受信された電波を所定の時間間隔で取得を行う第1のステップと、
前記取得の回数の関数として、前記受信された電波の電力を算出する第2のステップと、
前記関数から複数の代表点を抽出する第3のステップと、
前記代表点に基づいて前記対象物を前記受信アンテナの光軸より上方にある上方構造物であるか否か判定する第4のステップと、
をコンピュータに実行させるためのコンピュータプログラム。
【図1】

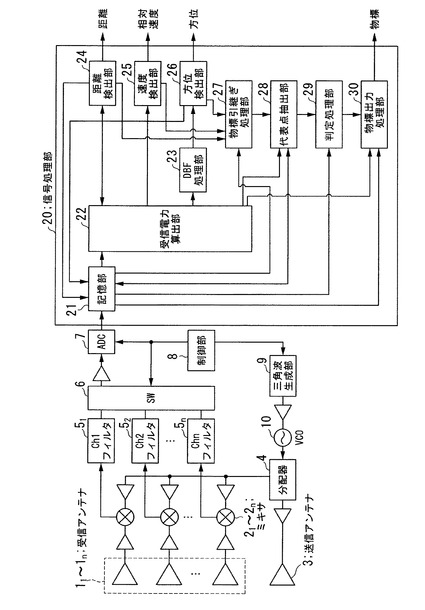
【図2】
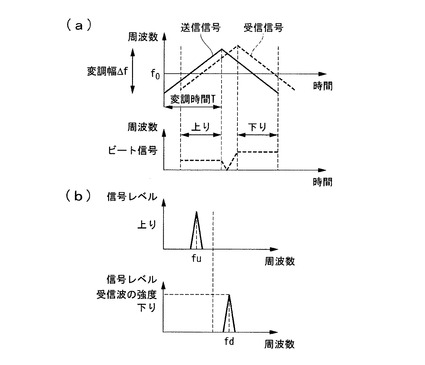
【図3】
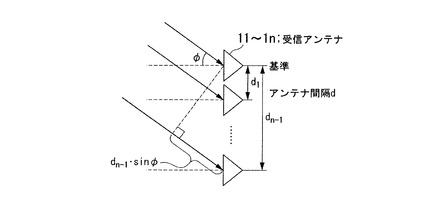
【図4】
【図5】
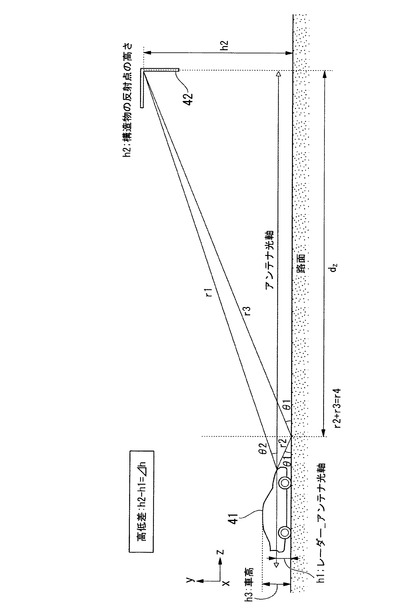
【図6】
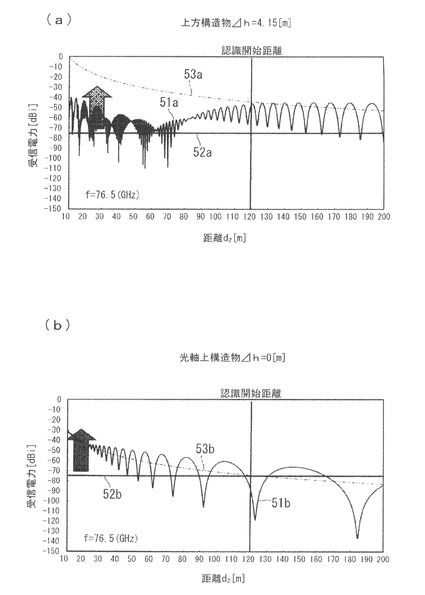
【図7】
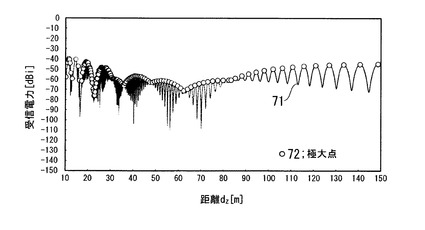
【図8】
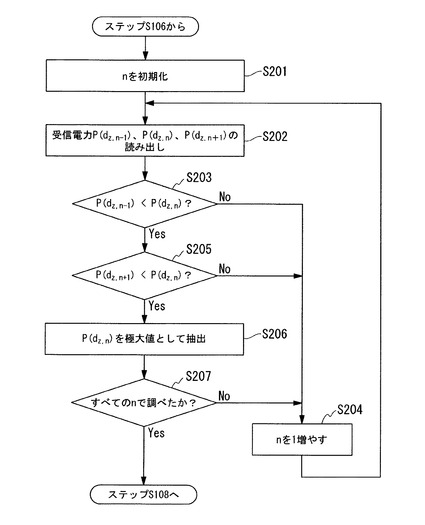
【図9】
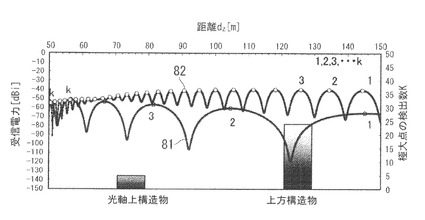
【図10】
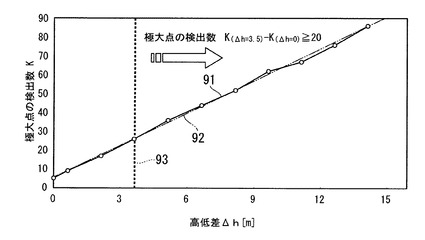
【図11】
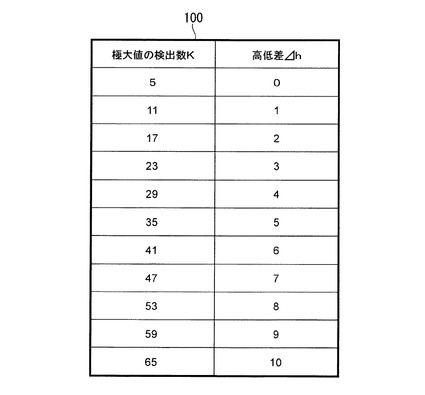
【図12】
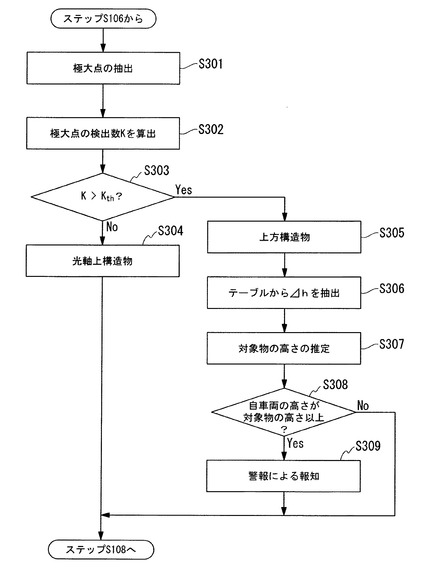
【図13】
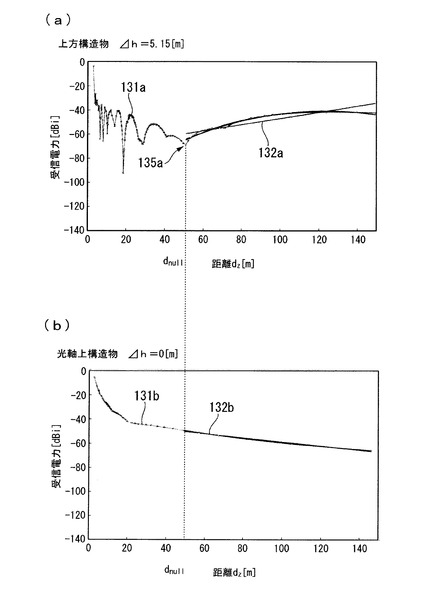
【図14】
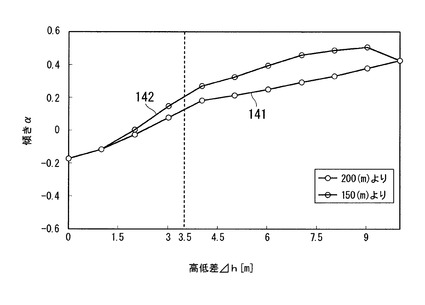
【図15】
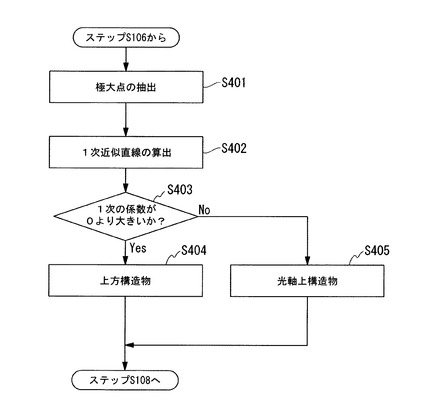
【図16】
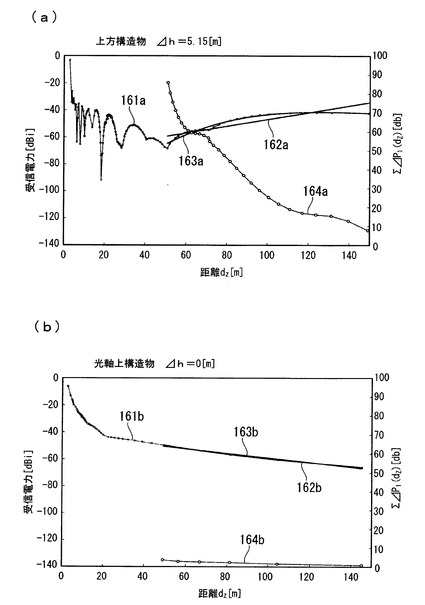
【図17】
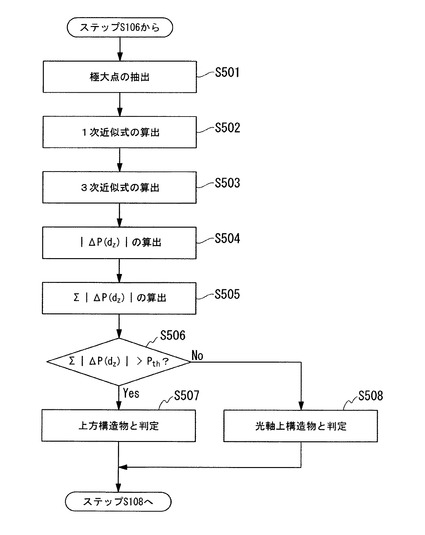
【図18】
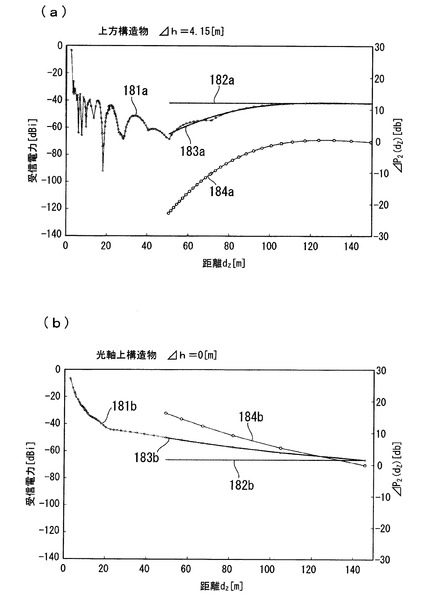
【図19】
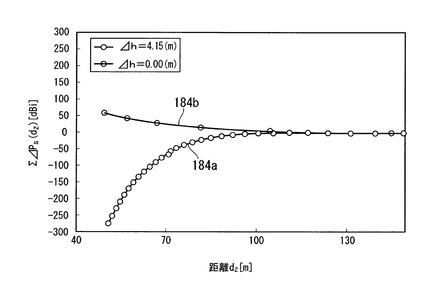
【図20】
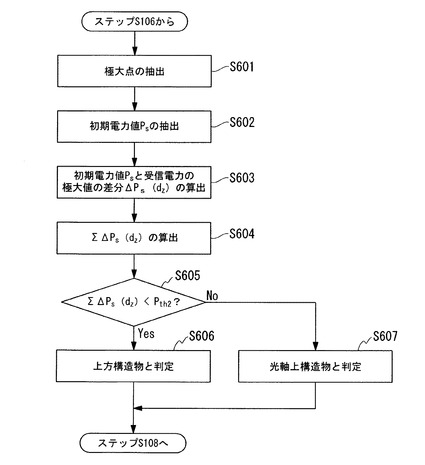
【図21】
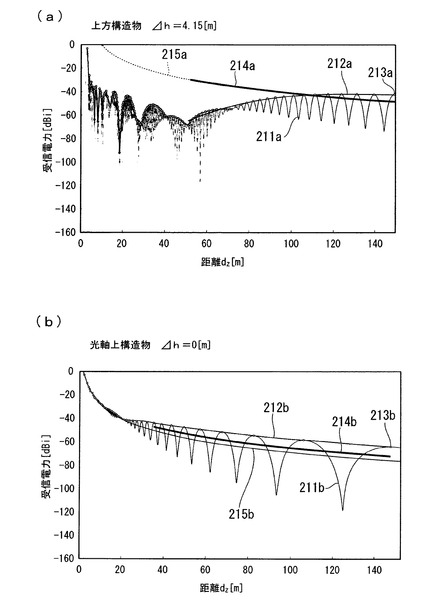
【図22】
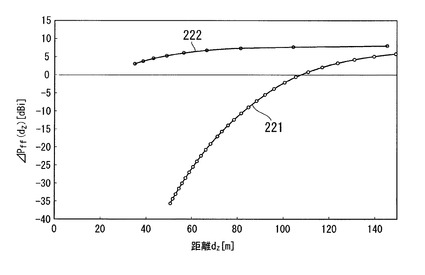
【図23】
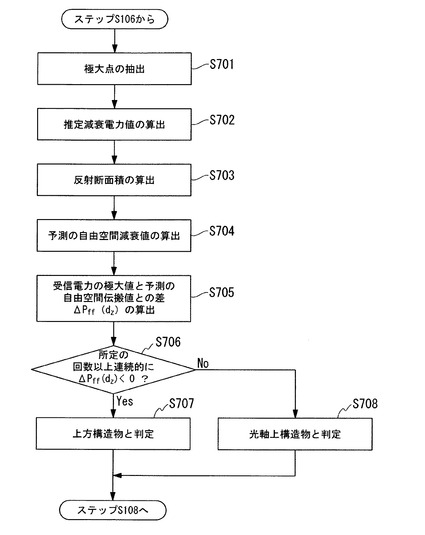
【図24】
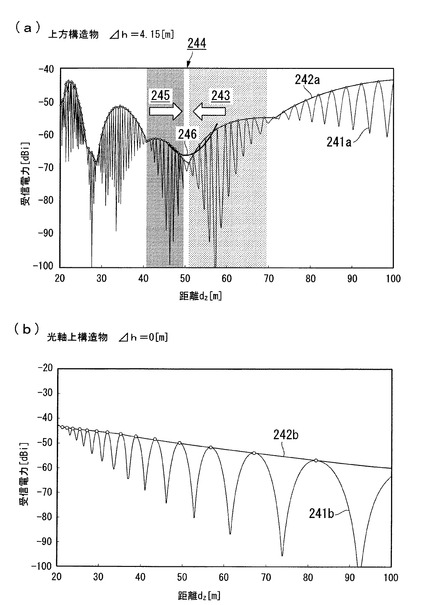
【図25】
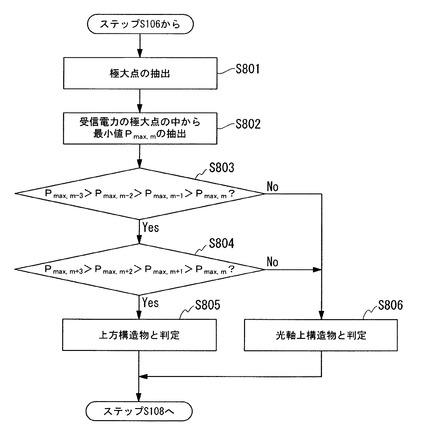
【図26】
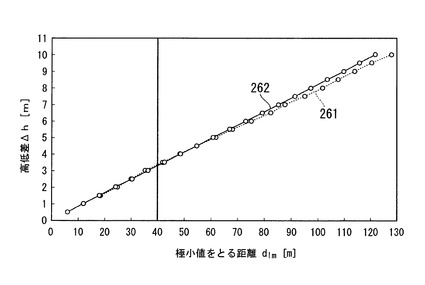
【図27】
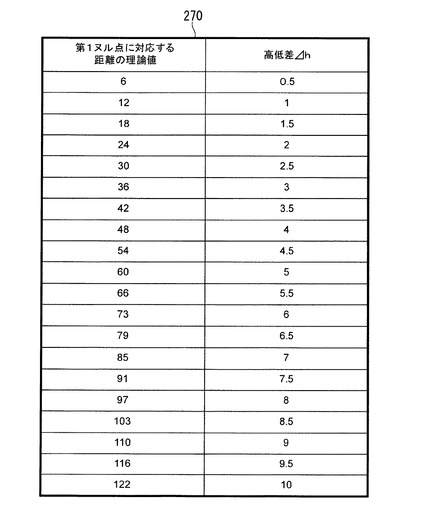
【図28】
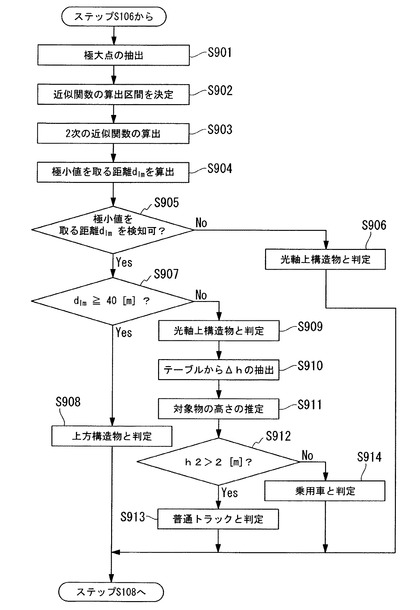
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2012−18058(P2012−18058A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−155052(P2010−155052)
【出願日】平成22年7月7日(2010.7.7)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【出願人】(300052246)株式会社ホンダエレシス (105)
【Fターム(参考)】
[ Back to top ]