
レーダ装置及び入射時間推定方法
【課題】RCSが小さい目標からの反射波は電力レベルが低くなり、これを送信源からの直接波との相関演算処理を用いて探知する場合、目標反射波の受信タイミングが得られず送信源からの直接波との入射時間の遅延時間差が求められないという課題があった。
【解決手段】この発明に係るレーダ装置は、受信信号のうちレベルの高い送信源から直接入射する信号の受信タイミングのデータについて0(ゼロ)の値に置き換える0づめ処理を行い、0づめ処理後のデータと送信源からの直接波に相当するデータとの相関演算により相関係数を求めることで、目標反射波を入射する入射タイミングの推定精度を向上させる。
【解決手段】この発明に係るレーダ装置は、受信信号のうちレベルの高い送信源から直接入射する信号の受信タイミングのデータについて0(ゼロ)の値に置き換える0づめ処理を行い、0づめ処理後のデータと送信源からの直接波に相当するデータとの相関演算により相関係数を求めることで、目標反射波を入射する入射タイミングの推定精度を向上させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、送信源から直接入射する受信信号と同じ送信源から送信され目標で反射した信号との相関演算を行い、これらの入射時間差の推定を行う方法に関するものである。
【背景技術】
【0002】
バイスタティックやマルチスタティックの測位処理等では送信源から直接入射する受信信号と同じ送信源から送信され目標で反射した信号の入射時間差を用いることが知られている。このようなシステムの一例として、信号特性が既知の送信源が電波を送信し、その電波の目標反射波を受信して送信信号との相関を求めることで固定目標や移動目標などの方位・位置・速度などを推定する方法がある(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Bradaric,G.T.Capraro,D.D.Weiner,and M.C.Wicks,“Multistatic Radar System Signal Processing,” 2006 IEEE Conference on Radar,APRIL 2006.
【発明の概要】
【発明が解決しようとする課題】
【0004】
RCSが小さい目標からの反射波は、電力レベルが低くなり、これを送信源からの直接波との相関演算処理を用いて探知する場合、
(a)従来のしきい値検出では目標反射波のパルス入射時間が不明である(=目標反射波の受信レベルがノイズレベル以下)、
(b)相関処理を行っても送信源からの直接波の自己相関のサイドローブに目標反射波のピークが埋もれる、
ことにより目標反射波の受信タイミングが得られず、送信源からの直接波との入射時間の遅延時間差が求められないという課題があった。
【課題を解決するための手段】
【0005】
この発明に係るレーダ装置は、送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、前記A/D変換後の波形データに対してPRI(Pulse Repetition Interval)を推定するPRI変換処理部と、前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部とを備える。
【発明の効果】
【0006】
この発明に係るレーダ装置によれば、RCSが小さい目標であっても、送信源から発せられ当該目標で反射されたパルス波が受信部に入射する入射タイミングの推定精度を向上させることができる。
【図面の簡単な説明】
【0007】
【図1】実施の形態1に係るレーダ装置の構成及び動作を説明する図である。
【図2】実施の形態2に係るレーダ装置の構成及び動作を説明する図である。
【図3】実施の形態3に係るレーダ装置の構成及び動作を説明する図である。
【図4】実施の形態4に係るレーダ装置の構成及び動作を説明する図である。
【発明を実施するための形態】
【0008】
実施の形態1.
以下、図を用いてこの発明の実施の形態1に係るバイスタティックレーダ装置を説明する。
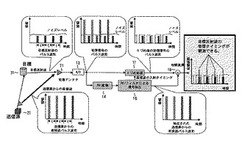
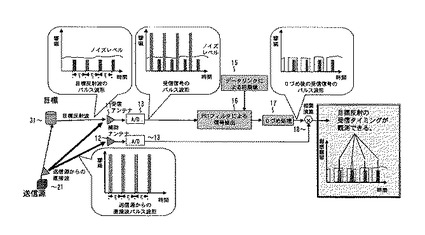
図1は、実施の形態1に係るバイスタティックレーダ装置の構成及び動作を説明する図である。
図1に示すように、本実施の形態に係るバイスタティックレーダ装置は、受信アンテナ11と、A/D変換器13と、A/D変換器13の出力に対してPRI(Pulse Repetition Interval、パルス繰返し周期)を推定するPRI変換処理部14と、推定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、PRIフィルタ処理出力と0づめ処理間の相関演算を行う相関演算処理部18とから構成される。0づめの処理については後で説明する。
【0009】
次に、バイスタティックレーダ装置の動作について、図1中の波形を参照しながら説明する。
【0010】
受信アンテナ11は、所定のパルス繰返し周期(PRI)で変調されたパルス波を送信する送信源21から直接送信されてきた直接波のパルス(以下、直接波という)を受信し、また、送信源21から送信されRCS(Radar Cross Section)の小さい目標31で反射した目標反射波のパルス(以下、目標反射波という)を受信する。
【0011】
このとき、直接波のパルス波形はノイズレベルよりも十分大きな電力レベルで受信アンテナ11に入射するが、目標反射波のパルス波形は、RCSが小さいことからノイズレベルよりも小さい電力レベルで入射することになる。
【0012】
直接波と目標反射波の波形を受信アンテナ11にて受信し、それをA/D変換した出力は、直接波のパルス波形のみがノイズレベルよりも超えて観測できており、目標反射波のパルス波形はノイズレベル以下となるため観測できていない。
【0013】
PRI変換処理部14はA/D変換器13の出力に対してPRI変換を行う。ここでPRI変換とは、入射時間を入力しその入射波のPRIを推定する処理である。
図1の例ではA/D変換出力の波形は目標反射波のパルス波形は観測されず、直接波のパルス列の入射時間が観測されているだけであるため、PRI変換処理部14は直接波パルス列のPRIのみを推定する。
【0014】
次にPRIフィルタ処理部16は、PRI変換処理部14にて推定された直接波パルス列のPRIに該当する波形を抽出し、その受信時間を記録しておく処理を行う。
図1の例では、PRIフィルタ処理部16はA/D変換出力の波形から直接波のパルス波形を抽出し、ノイズレベルになる時間の波形データは抽出しない。
PRIフィルタ処理部16は、直接波のパルス波形の受信時刻を記録するとともに、この受信時刻を、直接波の入射タイミングとして0づめ処理部17に出力する。
【0015】
0づめ処理部17では、A/D変換器13からの出力であるA/D変換出力に対して、PRIフィルタ処理部16で推定された直接波パルス波形の受信時間に該当する時間に、0づめの処理を行う。
0づめ処理部17では、A/D変換器13からの出力である時系列信号データのA/D変換出力のうち、PRIフィルタ処理部16で推定された直接波パルス波形の入射タイミングに該当する時系列データを、0に置き換える処理を行う。この処理により、A/D変換出力のうち直接波パルス波形を受信していた時間のみ0になる波形が生成される。
【0016】
この0づめの処理により、A/D変換器13からのA/D変換出力のなかで、直接波パルス波形を受信していた時間のみ、振幅が0になる波形(以下、0づめ後の受信信号のパルス波形)が生成される。
【0017】
相関演算処理部18は、0づめ処理部17で処理した0づめ後の受信信号のパルス波形と、PRIフィルタ処理部16の出力である直接波のパルス波形との相互相関演算を行う。
相関演算処理部18は、0づめ処理部17で処理した0づめ後の受信信号のパルス波形(f1(t))と、PRIフィルタ処理部16の出力である直接波のパルス波形(f2(t))との相互相関演算を行う。
【0018】
【数1】

【0019】
このように、相互相関演算により、相互相関演算結果のピーク値が目標反射波の受信タイミングと一致する時間に現れるため、目標反射波の受信タイミングを観測することができる。
【0020】
この処理を行うことで、しきい値検出ではノイズレベル以下のため検出できない目標反射波のパルス波形の入射時間が観測できる。
【0021】
また、電力レベルの大きい直接波のパルス波形を抽出しない波形での相関演算では直接波同士の自己相関が高く、そのサイドローブに埋もれてしまっていた目標反射の受信タイミングが観測できる。
【0022】
このようにして観測された目標反射波の受信タイミングと、PRIフィルタ処理部16で推定された直接波パルス列受信タイミングの時間差から、送信地点、受信地点を焦点とする楕円として等遅延時間差線が決定し、モノパルス測角や超分解能アルゴリズム等による測角処理によって求められた送信地点、受信地点を結ぶ直線とのなす角とを組み合わせることで、等遅延時間差線上の一点を推定することができ、バイスタティックな測位処理が可能となる。
【0023】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0024】
なお、実施の形態1ではバイスタティックレーダを例にとり説明したが、マルチスタティックレーダであっても本発明はその効果を奏することができる。
【0025】
実施の形態2.
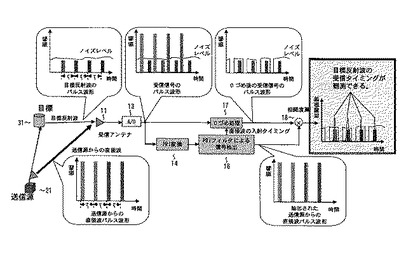
図2を元に発明を実施するための形態を説明する。
図2に示すように、遅延時間推定装置は受信アンテナ11、A/D変換器13と、データリンク15等により得られた初期値と、初期値で指定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、PRIフィルタ処理出力と0づめ処理間の相関演算を行う相関演算処理部18とが設けられている。なお、データリンク15は有線、無線を問わず、送信源の位置や送信源が発する電波のPRIなどの初期値の情報を入手可能な通信システムである。
【0026】
実施の形態1では受信した波形に対してPRI変換を行い、ノイズレベル以上で観測された直接波のパルス波形のPRIを推定していたが、データリンク等により送信源のPRIが既知であれば、これを用いてPRIフィルタ処理部16において、指定された直接波パルス列のPRIに該当する波形を抽出し、その受信タイミングを得ることができる。
【0027】
直接波パルス列の受信タイミングが得られれば、実施の形態1と同様に、0づめ、相互相関演算処理を行うことで、目標反射波の受信タイミングが観測可能となる。
【0028】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。さらに、送信源も移動する場合、データリンク等で初期値として送信源位置等を得、送信源の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0029】
また、初期値として、送信源と本遅延時間推定方法を搭載した移動体の位置情報が得られている場合には、その位置関係から大まかな受信タイミングを予測し、その近傍でのみPRIフィルタ処理部16の演算を実施することで信号処理負荷を低減することもできる。
【0030】
実施の形態3.
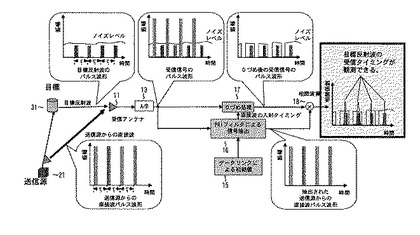
図3を元に発明を実施するための形態を説明する。
【0031】
図3に示すように、遅延時間推定装置は受信アンテナ11、補助アンテナ12と、それぞれの出力をA/D変換するA/D変換器13と、受信アンテナのA/D変換出力に対してPRIを推定するPRI変換処理部14、推定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、補助アンテナのA/D変換出力と0づめ処理出力間の相関演算を行う相関演算処理部18とが設けられている。
【0032】
次に、この実施の形態3の動作について図3中の波形のイメージを参照しながら説明する。
【0033】
受信アンテナ11には、送信源21から直接入射する直接波のパルスと、送信源21から送信され、RCSの小さい目標31で反射した目標反射波のパルスが入射する。また、補助アンテナ12には送信源21から直接入射する直接波のパルスのみが入射する。
【0034】
このとき、受信アンテナ11には直接波のパルス波形は、ノイズレベルよりも十分大きな電力レベルで入射し、目標反射波のパルス波形は、ノイズレベルよりも小さい電力レベルで入射する。一方の補助アンテナ12には直接波のパルス波形のみが、ノイズレベルよりも十分大きな電力レベルで入射する。
【0035】
受信アンテナにて受信し、それをA/D変換した出力は、直接波のパルス波形のみがノイズレベルよりも超えて観測できており、目標反射波のパルス波形はノイズレベル以下となるため観測できていない。
【0036】
PRI変換処理部14では、受信アンテナにて受信し、それをA/D変換出力に対してPRI変換を行う。ここでは、A/D変換出力の波形では直接波のパルス列の入射時間が観測されているだけであるので、直接波パルス列のPRIが推定される。
【0037】
PRIフィルタ処理部16では、推定された直接波パルス列のPRIに該当する波形を抽出し、その受信時間を記録しておく処理を行う。ここでは、直接波のパルス波形が抽出され、ノイズレベルになる時間の波形データは抽出されない。また、直接波パルス波形の受信時刻が記録される。
【0038】
0づめ処理部17では、受信アンテナにて受信し、それをA/D変換した出力に対してPRIフィルタ処理部で推定された直接波パルス波形の受信時間に該当する時間に0づめを行う。この処理により、A/D変換出力のうち直接波パルス波形を受信していた時間のみ0になる波形が生成される。
【0039】
相関演算処理部18では、0づめ後の波形と、補助アンテナにて受信し、それをA/D変換した出力である直接波のパルス波形との相互相関演算を行う。相互相関演算結果のピーク値が目標反射波の受信タイミングと一致する時間に現れるため、目標反射波の受信タイミングが観測可能となる。なお、相互相関演算については実施の形態1の記載と同様であり、ここでは説明を省略する。
【0040】
この処理を行うことで、しきい値検出ではノイズレベル以下のため検出できない目標反射波のパルス波形の入射時間が観測できる。
【0041】
また、電力レベルの大きい直接波のパルス波形を抽出しない波形での相関演算では、直接波同士の自己相関が高くなり、そのサイドローブに埋もれてしまっていた目標反射の受信タイミングが観測できる。
【0042】
このようにして観測された目標反射波の受信タイミングと、PRIフィルタ処理部16で推定された直接波パルス列受信タイミングの時間差から、等遅延時間差線が決定し、測角処理等と組み合わせることで、バイスタティックな測位処理が可能となる。
【0043】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0044】
実施の形態4.
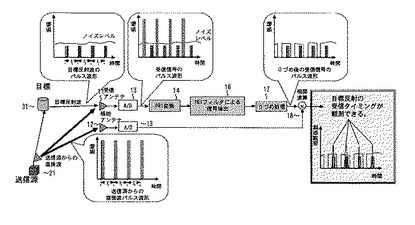
図4を元に発明を実施するための形態を説明する。
図2に示すように、遅延時間推定装置は受信アンテナ11、補助アンテナ12と、それぞれの出力をA/D変換するA/D変換器13と、データリンク15等により得られた初期値と、初期値で指定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、補助アンテナのA/D変換出力と0づめ処理間の相関演算を行う相関演算処理部18とが設けられている。
【0045】
実施の形態3では受信アンテナのA/D変換出力に対してPRI変換を行い、ノイズレベル以上で観測された直接波のパルス波形のPRIを推定していたが、データリンク等により送信源のPRIが既知であれば、これを用いてPRIフィルタ処理部16において、指定された直接波パルス列のPRIに該当する波形を抽出し、その受信タイミングを得ることができる。
【0046】
直接波パルス列の受信タイミングが得られれば、実施の形態3と同様に、0づめ、相互相関演算処理を行うことで、目標反射波の受信タイミングが観測可能となる。
【0047】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。さらに、送信源も移動する場合、データリンク等で初期値として送信源位置等を得、送信源の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0048】
また、初期値として、送信源と本遅延時間推定方法を搭載した移動体の位置情報が得られている場合には、その位置関係から大まかな受信タイミングを予測し、その近傍でのみPRIフィルタ処理部16の演算を実施することで信号処理負荷を低減することもできる。
【符号の説明】
【0049】
11 受信アンテナ、12 補助アンテナ、13 A/D変換器、14 PRI変換処理部、15 データリンク情報、16 PRIフィルタ処理部、17 0づめ処理部、18 相関演算処理部、19 しきい値処理部、21 送信源、31 目標。
【技術分野】
【0001】
この発明は、送信源から直接入射する受信信号と同じ送信源から送信され目標で反射した信号との相関演算を行い、これらの入射時間差の推定を行う方法に関するものである。
【背景技術】
【0002】
バイスタティックやマルチスタティックの測位処理等では送信源から直接入射する受信信号と同じ送信源から送信され目標で反射した信号の入射時間差を用いることが知られている。このようなシステムの一例として、信号特性が既知の送信源が電波を送信し、その電波の目標反射波を受信して送信信号との相関を求めることで固定目標や移動目標などの方位・位置・速度などを推定する方法がある(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Bradaric,G.T.Capraro,D.D.Weiner,and M.C.Wicks,“Multistatic Radar System Signal Processing,” 2006 IEEE Conference on Radar,APRIL 2006.
【発明の概要】
【発明が解決しようとする課題】
【0004】
RCSが小さい目標からの反射波は、電力レベルが低くなり、これを送信源からの直接波との相関演算処理を用いて探知する場合、
(a)従来のしきい値検出では目標反射波のパルス入射時間が不明である(=目標反射波の受信レベルがノイズレベル以下)、
(b)相関処理を行っても送信源からの直接波の自己相関のサイドローブに目標反射波のピークが埋もれる、
ことにより目標反射波の受信タイミングが得られず、送信源からの直接波との入射時間の遅延時間差が求められないという課題があった。
【課題を解決するための手段】
【0005】
この発明に係るレーダ装置は、送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、前記A/D変換後の波形データに対してPRI(Pulse Repetition Interval)を推定するPRI変換処理部と、前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部とを備える。
【発明の効果】
【0006】
この発明に係るレーダ装置によれば、RCSが小さい目標であっても、送信源から発せられ当該目標で反射されたパルス波が受信部に入射する入射タイミングの推定精度を向上させることができる。
【図面の簡単な説明】
【0007】
【図1】実施の形態1に係るレーダ装置の構成及び動作を説明する図である。
【図2】実施の形態2に係るレーダ装置の構成及び動作を説明する図である。
【図3】実施の形態3に係るレーダ装置の構成及び動作を説明する図である。
【図4】実施の形態4に係るレーダ装置の構成及び動作を説明する図である。
【発明を実施するための形態】
【0008】
実施の形態1.
以下、図を用いてこの発明の実施の形態1に係るバイスタティックレーダ装置を説明する。
図1は、実施の形態1に係るバイスタティックレーダ装置の構成及び動作を説明する図である。
図1に示すように、本実施の形態に係るバイスタティックレーダ装置は、受信アンテナ11と、A/D変換器13と、A/D変換器13の出力に対してPRI(Pulse Repetition Interval、パルス繰返し周期)を推定するPRI変換処理部14と、推定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、PRIフィルタ処理出力と0づめ処理間の相関演算を行う相関演算処理部18とから構成される。0づめの処理については後で説明する。
【0009】
次に、バイスタティックレーダ装置の動作について、図1中の波形を参照しながら説明する。
【0010】
受信アンテナ11は、所定のパルス繰返し周期(PRI)で変調されたパルス波を送信する送信源21から直接送信されてきた直接波のパルス(以下、直接波という)を受信し、また、送信源21から送信されRCS(Radar Cross Section)の小さい目標31で反射した目標反射波のパルス(以下、目標反射波という)を受信する。
【0011】
このとき、直接波のパルス波形はノイズレベルよりも十分大きな電力レベルで受信アンテナ11に入射するが、目標反射波のパルス波形は、RCSが小さいことからノイズレベルよりも小さい電力レベルで入射することになる。
【0012】
直接波と目標反射波の波形を受信アンテナ11にて受信し、それをA/D変換した出力は、直接波のパルス波形のみがノイズレベルよりも超えて観測できており、目標反射波のパルス波形はノイズレベル以下となるため観測できていない。
【0013】
PRI変換処理部14はA/D変換器13の出力に対してPRI変換を行う。ここでPRI変換とは、入射時間を入力しその入射波のPRIを推定する処理である。
図1の例ではA/D変換出力の波形は目標反射波のパルス波形は観測されず、直接波のパルス列の入射時間が観測されているだけであるため、PRI変換処理部14は直接波パルス列のPRIのみを推定する。
【0014】
次にPRIフィルタ処理部16は、PRI変換処理部14にて推定された直接波パルス列のPRIに該当する波形を抽出し、その受信時間を記録しておく処理を行う。
図1の例では、PRIフィルタ処理部16はA/D変換出力の波形から直接波のパルス波形を抽出し、ノイズレベルになる時間の波形データは抽出しない。
PRIフィルタ処理部16は、直接波のパルス波形の受信時刻を記録するとともに、この受信時刻を、直接波の入射タイミングとして0づめ処理部17に出力する。
【0015】
0づめ処理部17では、A/D変換器13からの出力であるA/D変換出力に対して、PRIフィルタ処理部16で推定された直接波パルス波形の受信時間に該当する時間に、0づめの処理を行う。
0づめ処理部17では、A/D変換器13からの出力である時系列信号データのA/D変換出力のうち、PRIフィルタ処理部16で推定された直接波パルス波形の入射タイミングに該当する時系列データを、0に置き換える処理を行う。この処理により、A/D変換出力のうち直接波パルス波形を受信していた時間のみ0になる波形が生成される。
【0016】
この0づめの処理により、A/D変換器13からのA/D変換出力のなかで、直接波パルス波形を受信していた時間のみ、振幅が0になる波形(以下、0づめ後の受信信号のパルス波形)が生成される。
【0017】
相関演算処理部18は、0づめ処理部17で処理した0づめ後の受信信号のパルス波形と、PRIフィルタ処理部16の出力である直接波のパルス波形との相互相関演算を行う。
相関演算処理部18は、0づめ処理部17で処理した0づめ後の受信信号のパルス波形(f1(t))と、PRIフィルタ処理部16の出力である直接波のパルス波形(f2(t))との相互相関演算を行う。
【0018】
【数1】
【0019】
このように、相互相関演算により、相互相関演算結果のピーク値が目標反射波の受信タイミングと一致する時間に現れるため、目標反射波の受信タイミングを観測することができる。
【0020】
この処理を行うことで、しきい値検出ではノイズレベル以下のため検出できない目標反射波のパルス波形の入射時間が観測できる。
【0021】
また、電力レベルの大きい直接波のパルス波形を抽出しない波形での相関演算では直接波同士の自己相関が高く、そのサイドローブに埋もれてしまっていた目標反射の受信タイミングが観測できる。
【0022】
このようにして観測された目標反射波の受信タイミングと、PRIフィルタ処理部16で推定された直接波パルス列受信タイミングの時間差から、送信地点、受信地点を焦点とする楕円として等遅延時間差線が決定し、モノパルス測角や超分解能アルゴリズム等による測角処理によって求められた送信地点、受信地点を結ぶ直線とのなす角とを組み合わせることで、等遅延時間差線上の一点を推定することができ、バイスタティックな測位処理が可能となる。
【0023】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0024】
なお、実施の形態1ではバイスタティックレーダを例にとり説明したが、マルチスタティックレーダであっても本発明はその効果を奏することができる。
【0025】
実施の形態2.
図2を元に発明を実施するための形態を説明する。
図2に示すように、遅延時間推定装置は受信アンテナ11、A/D変換器13と、データリンク15等により得られた初期値と、初期値で指定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、PRIフィルタ処理出力と0づめ処理間の相関演算を行う相関演算処理部18とが設けられている。なお、データリンク15は有線、無線を問わず、送信源の位置や送信源が発する電波のPRIなどの初期値の情報を入手可能な通信システムである。
【0026】
実施の形態1では受信した波形に対してPRI変換を行い、ノイズレベル以上で観測された直接波のパルス波形のPRIを推定していたが、データリンク等により送信源のPRIが既知であれば、これを用いてPRIフィルタ処理部16において、指定された直接波パルス列のPRIに該当する波形を抽出し、その受信タイミングを得ることができる。
【0027】
直接波パルス列の受信タイミングが得られれば、実施の形態1と同様に、0づめ、相互相関演算処理を行うことで、目標反射波の受信タイミングが観測可能となる。
【0028】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。さらに、送信源も移動する場合、データリンク等で初期値として送信源位置等を得、送信源の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0029】
また、初期値として、送信源と本遅延時間推定方法を搭載した移動体の位置情報が得られている場合には、その位置関係から大まかな受信タイミングを予測し、その近傍でのみPRIフィルタ処理部16の演算を実施することで信号処理負荷を低減することもできる。
【0030】
実施の形態3.
図3を元に発明を実施するための形態を説明する。
【0031】
図3に示すように、遅延時間推定装置は受信アンテナ11、補助アンテナ12と、それぞれの出力をA/D変換するA/D変換器13と、受信アンテナのA/D変換出力に対してPRIを推定するPRI変換処理部14、推定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、補助アンテナのA/D変換出力と0づめ処理出力間の相関演算を行う相関演算処理部18とが設けられている。
【0032】
次に、この実施の形態3の動作について図3中の波形のイメージを参照しながら説明する。
【0033】
受信アンテナ11には、送信源21から直接入射する直接波のパルスと、送信源21から送信され、RCSの小さい目標31で反射した目標反射波のパルスが入射する。また、補助アンテナ12には送信源21から直接入射する直接波のパルスのみが入射する。
【0034】
このとき、受信アンテナ11には直接波のパルス波形は、ノイズレベルよりも十分大きな電力レベルで入射し、目標反射波のパルス波形は、ノイズレベルよりも小さい電力レベルで入射する。一方の補助アンテナ12には直接波のパルス波形のみが、ノイズレベルよりも十分大きな電力レベルで入射する。
【0035】
受信アンテナにて受信し、それをA/D変換した出力は、直接波のパルス波形のみがノイズレベルよりも超えて観測できており、目標反射波のパルス波形はノイズレベル以下となるため観測できていない。
【0036】
PRI変換処理部14では、受信アンテナにて受信し、それをA/D変換出力に対してPRI変換を行う。ここでは、A/D変換出力の波形では直接波のパルス列の入射時間が観測されているだけであるので、直接波パルス列のPRIが推定される。
【0037】
PRIフィルタ処理部16では、推定された直接波パルス列のPRIに該当する波形を抽出し、その受信時間を記録しておく処理を行う。ここでは、直接波のパルス波形が抽出され、ノイズレベルになる時間の波形データは抽出されない。また、直接波パルス波形の受信時刻が記録される。
【0038】
0づめ処理部17では、受信アンテナにて受信し、それをA/D変換した出力に対してPRIフィルタ処理部で推定された直接波パルス波形の受信時間に該当する時間に0づめを行う。この処理により、A/D変換出力のうち直接波パルス波形を受信していた時間のみ0になる波形が生成される。
【0039】
相関演算処理部18では、0づめ後の波形と、補助アンテナにて受信し、それをA/D変換した出力である直接波のパルス波形との相互相関演算を行う。相互相関演算結果のピーク値が目標反射波の受信タイミングと一致する時間に現れるため、目標反射波の受信タイミングが観測可能となる。なお、相互相関演算については実施の形態1の記載と同様であり、ここでは説明を省略する。
【0040】
この処理を行うことで、しきい値検出ではノイズレベル以下のため検出できない目標反射波のパルス波形の入射時間が観測できる。
【0041】
また、電力レベルの大きい直接波のパルス波形を抽出しない波形での相関演算では、直接波同士の自己相関が高くなり、そのサイドローブに埋もれてしまっていた目標反射の受信タイミングが観測できる。
【0042】
このようにして観測された目標反射波の受信タイミングと、PRIフィルタ処理部16で推定された直接波パルス列受信タイミングの時間差から、等遅延時間差線が決定し、測角処理等と組み合わせることで、バイスタティックな測位処理が可能となる。
【0043】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0044】
実施の形態4.
図4を元に発明を実施するための形態を説明する。
図2に示すように、遅延時間推定装置は受信アンテナ11、補助アンテナ12と、それぞれの出力をA/D変換するA/D変換器13と、データリンク15等により得られた初期値と、初期値で指定されたPRIに該当するパルスを抽出するPRIフィルタ処理部16と、A/Dの出力に対してPRIフィルタ処理で抽出されたタイミングで0づめを行う0づめ処理部17と、補助アンテナのA/D変換出力と0づめ処理間の相関演算を行う相関演算処理部18とが設けられている。
【0045】
実施の形態3では受信アンテナのA/D変換出力に対してPRI変換を行い、ノイズレベル以上で観測された直接波のパルス波形のPRIを推定していたが、データリンク等により送信源のPRIが既知であれば、これを用いてPRIフィルタ処理部16において、指定された直接波パルス列のPRIに該当する波形を抽出し、その受信タイミングを得ることができる。
【0046】
直接波パルス列の受信タイミングが得られれば、実施の形態3と同様に、0づめ、相互相関演算処理を行うことで、目標反射波の受信タイミングが観測可能となる。
【0047】
また、本遅延時間推定方法を移動体に用いる場合には、抽出した直接波のパルス波形に対して、自己の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。さらに、送信源も移動する場合、データリンク等で初期値として送信源位置等を得、送信源の移動速度に対応したドップラ周波数をキャンセルすることにより適用することが可能となる。
【0048】
また、初期値として、送信源と本遅延時間推定方法を搭載した移動体の位置情報が得られている場合には、その位置関係から大まかな受信タイミングを予測し、その近傍でのみPRIフィルタ処理部16の演算を実施することで信号処理負荷を低減することもできる。
【符号の説明】
【0049】
11 受信アンテナ、12 補助アンテナ、13 A/D変換器、14 PRI変換処理部、15 データリンク情報、16 PRIフィルタ処理部、17 0づめ処理部、18 相関演算処理部、19 しきい値処理部、21 送信源、31 目標。
【特許請求の範囲】
【請求項1】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、
前記A/D変換後の波形データに対してPRI(Pulse Repetition Interval)を推定するPRI変換処理部と、
前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記相関演算処理部は、前記0づめ処理部が出力する置き換え後のパルス波形のデータと前記PRIフィルタ処理部が抽出するパルス波形のデータの相関演算の結果のピーク値が現れるタイミングを前記目標反射波の入射タイミングであると推定することを特徴とする請求項1記載のレーダ装置。
【請求項3】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する工程と、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換する工程と、
A/D変換後の波形データに対してPRIを推定する工程と、
A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出する工程と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する工程と、
前記PRIに該当するパルス波形のデータと、前記置き換え後のパルス波形のデータとの間の相関演算を行い、前記目標反射波の入射時間を推定する工程と、
を備えることを特徴とする入射時間推定方法。
【請求項4】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する第1の受信アンテナと、
前記送信源から発せられる前記パルス波を直接受信する第2の受信アンテナと、
前記第1の受信アンテナにより前記送信源から直接受信した直接波と、前記目標反射波とをA/D変換するA/D変換部と、
前記A/D変換後の波形データに対してPRIを推定するPRI変換処理部と、
前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記0づめ処理部が出力する置き換え後のパルス波形のデータと、前記第2の受信アンテナが受信した前記直接波のA/D変換後のパルス波形のデータとの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【請求項5】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、
データリンクから、前記送信源から発せられるパルス波のPRIを取得するデータリンクインターフェース部と、
前記A/D変換後の波形データから、前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【請求項1】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、
前記A/D変換後の波形データに対してPRI(Pulse Repetition Interval)を推定するPRI変換処理部と、
前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記相関演算処理部は、前記0づめ処理部が出力する置き換え後のパルス波形のデータと前記PRIフィルタ処理部が抽出するパルス波形のデータの相関演算の結果のピーク値が現れるタイミングを前記目標反射波の入射タイミングであると推定することを特徴とする請求項1記載のレーダ装置。
【請求項3】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する工程と、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換する工程と、
A/D変換後の波形データに対してPRIを推定する工程と、
A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出する工程と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する工程と、
前記PRIに該当するパルス波形のデータと、前記置き換え後のパルス波形のデータとの間の相関演算を行い、前記目標反射波の入射時間を推定する工程と、
を備えることを特徴とする入射時間推定方法。
【請求項4】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する第1の受信アンテナと、
前記送信源から発せられる前記パルス波を直接受信する第2の受信アンテナと、
前記第1の受信アンテナにより前記送信源から直接受信した直接波と、前記目標反射波とをA/D変換するA/D変換部と、
前記A/D変換後の波形データに対してPRIを推定するPRI変換処理部と、
前記A/D変換後の波形データから、推定された前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記0づめ処理部が出力する置き換え後のパルス波形のデータと、前記第2の受信アンテナが受信した前記直接波のA/D変換後のパルス波形のデータとの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【請求項5】
送信源から発せられる所定のパルス繰返し周期で変調されたパルス波を直接受信すると共に、前記パルス波が目標で反射された目標反射波を受信する受信アンテナと、
前記送信源から直接受信した直接波と前記目標反射波とをA/D変換するA/D変換部と、
データリンクから、前記送信源から発せられるパルス波のPRIを取得するデータリンクインターフェース部と、
前記A/D変換後の波形データから、前記PRIに該当するパルス波形のデータを抽出すると共に、抽出された前記パルス波形の受信タイミングを算出するPRIフィルタ処理部と、
前記A/D変換後の波形データに対し、前記受信タイミングに該当する波形データを0(ゼロ)に置き換え、置き換え後のパルス波形のデータを出力する0づめ処理部と、
前記PRIフィルタ処理部が抽出したパルス波形のデータと、前記0づめ処理部が出力する置き換え後のパルス波形のデータの間の相関演算を行い、相関演算の結果に基き前記目標反射波の入射タイミングを推定する相関演算処理部と、
を備えることを特徴とするレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−173040(P2012−173040A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33204(P2011−33204)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]