
レーダ装置及び物標検出方法
【課題】静止物のピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とするレーダ装置及び物標検出方法を提供することを目的とする。
【解決手段】送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段(32)と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段(33)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段(34)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段(35)を有することを特徴とするレーダ装置(10)。
【解決手段】送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段(32)と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段(33)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段(34)と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段(35)を有することを特徴とするレーダ装置(10)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置及び物標検出方法に関し、特に、車両や静止物等の物標からの反射波を利用して物標を検出するレーダ装置及び物標検出方法に関する。
【背景技術】
【0002】
近年、自動車の安全性の向上や、快適な運転の実現のために、自動車の高機能化が求められている。特に、走行中に前方に存在する車両や歩行者等との接触を回避すること、あるいは、前方を走行する車両に追随して自動運転を行うこと等を目的として、これらの物標を検出する車載用レーダ装置が重要となっている。
【0003】
このような車載用レーダ装置の内、FM−CW(周波数変調−連続波)レーダ方式を用いた装置では、送信用電圧制御発振器(VCO)に三角波のベースバンド信号を加え、周波数変調を行って、アンテナから自動車の前方に送信する。この場合、レーダ装置は、送信信号を自車両の前方の所定の角度範囲でアンテナをスキャンさせ、複数本のビームが所定の角度間隔で送信されるようにしている。また、レーダ装置では、物標にあたって反射した信号をアンテナで受信し、送信信号と受信信号とを混合してアップビート及びダウンビートの各ピーク信号を抽出し、各ピーク信号のグルーピングを行い、グルーピングから得られた物標のペアリングを行って物標との距離や相対速度を算出している。(例えば、特許文献1参照)。
【0004】
また、特許文献1に記載のレーザ装置では、これまでの物標の推移から今回の物標の位置を予測し、予測位置に基づいてグルーピングを行う過去対応グルーピングによって、埋もれてしまうピーク信号を検出するようにしている。
【0005】
また、FM−CW方式のレーダの信号処理装置において、アップビートとダウンビートにおいて、ピーク周波数の数が異なる場合には、欠落したピーク周波数のピーク幅内でパワーがピークとなる周波数をピーク周波数として、アップビートとダウンビートにおいてピーク周波数が同じになるようにして、ピーク周波数同士のペアリングを行うことが知られている(例えば、特許文献2参照)。
【0006】
【特許文献1】特開2003−149325号公報
【特許文献2】特開平11−316273号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、簡易的且つ正確な方法で、静止物の近傍に他の物標が存在する場合に、静止物に対応するピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とする方法は知られていなかった。
【0008】
以下、静止物の近傍に物標が存在する場合の具体的な例について説明する。
【0009】
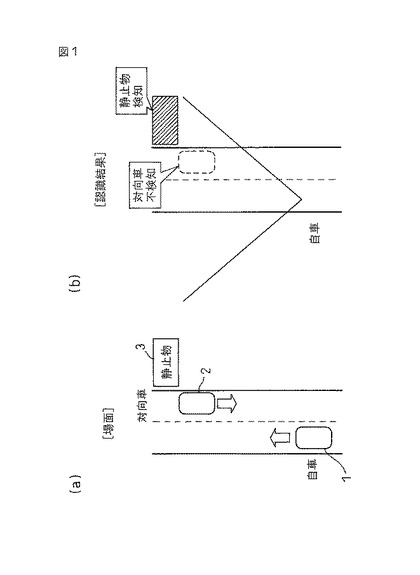
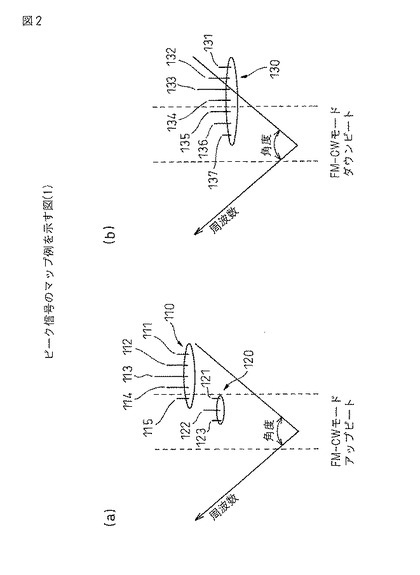
図1(a)は静止物の近傍に対向車が存在する実際の場面の一例を示し、図1(b)はその場合の認識結果の一例を示す図である。また、図2(a)は図1(a)に対応したFM−CWモードのアップビートにおけるピーク信号のマップを示す図であり、図2(b)は図1(a)に対応したFM−CWモードのダウンビートにおけるピーク信号のマップを示す図である。
【0010】
図1(a)に示す状況においては、図2(a)に示すように、アップビートにおけるピーク信号のマップでは、5つのビーム信号111〜115によるグループ110と、3つのビーム信号121〜123によるグループ120が形成されるが、図2(b)に示すように、ダウンビートにおけるピーク信号のマップでは、静止物3に対応したピーク信号の裾野に、対向車2に対応するピーク信号が埋もれてしまい、1つのグループ130を形成してしまう。このような事象は、静止物3の反射率が高く、静止物3に対応したピーク信号の最大ピーク(ピーク信号113参照)が大きく、前面が流線型をしている等の理由によって対向車2の反射率が低く、対向車2に対応したピーク信号の最大ピーク(ピーク信号122参照)が小さい場合に顕著に現れる。
【0011】
通常、静止物判定において、アップビートのグループ110の最大ピークに対応するダウンビートのグループのピーク信号が存在する場合、グループ110及びグループ130は、静止物に対応するピーク信号であると認識され、他の識別処理から除かれてしまう。したがって、対向車2が認識されず、図1(b)に示しように、対向車が検知されないという不都合があった。
【0012】
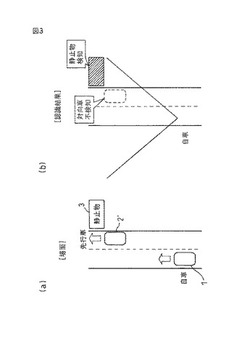
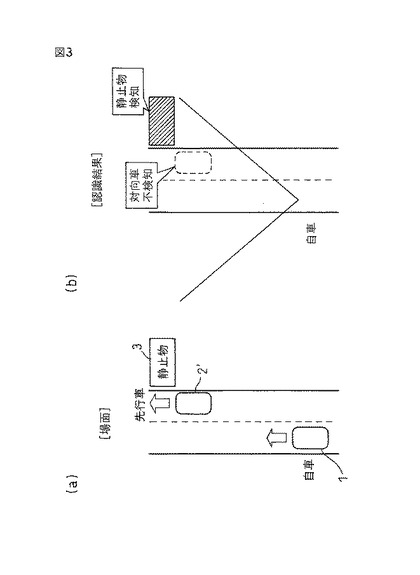
図1及び図2では、対向車が静止物の付近に存在する状況について説明した。しかしながら、図3(a)に示す様に、先行車2´が静止物3の付近の存在する場合についても、静止物に対応するピーク信号の裾野に、先行車に対応するピーク信号が埋もれてしまう場合がある。
【0013】
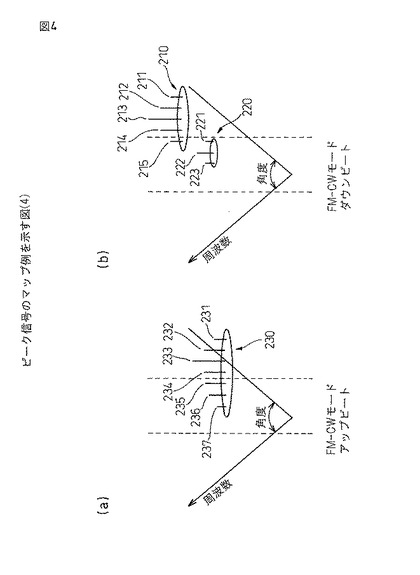
図4(a)は図3(a)に対応したFM−CWモードのアップビートにおけるピーク信号のマップを示す図であり、図4(b)は図3(a)に対応したFM−CWモードのダウンビートにおけるピーク信号のマップを示す図である。
【0014】
図3(a)に示す状況においては、図4(b)に示すように、ダウンビートにおけるピーク信号のマップでは、5つのビーム信号211〜215によるグループ210と、3つのビーム信号221〜223によるグループ220が形成されるが、図4(a)に示すように、アップビートにおけるピーク信号のマップでは、静止物3に対応したピーク信号の裾野に、先行車2´に対応するピーク信号が埋もれてしまい、1つのグループ230を形成してしまう。このような事象は、静止物3の反射率が高く、静止物3に対応したピーク信号の最大ピーク(ピーク信号213参照)が大きく、後部が流線型をしている等の理由によって先行車2´の反射率が低く、先行車2´に対応したピーク信号の最大ピーク(ピーク信号222参照)が小さい場合に顕著に現れる。
【0015】
通常、静止物判定において、ダウンビートのグループ210の最大ピークに対応するアップビートのグループのピーク信号が存在する場合、グループ210及びグループ230は、静止物に対応するピーク信号であると認識され、他の識別処理から除かれてしまう。したがって、先行車2´が認識されず、図3(b)に示しように、対向車が検知されないという不都合があった。
【0016】
そこで、本発明は、静止物の近傍に他の物標が存在する場合においても、静止物に対応するピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とするレーダ装置及び物標検出方法を提供することを目的とする。
【0017】
また、本発明は、アップビートのピーク信号又はダウンビートのピーク信号が他の物標のピーク信号に埋もれてしまうような場合であっても、埋もれてしまったピーク信号を正確に検出することができるレーダ装置及び物標検出方法を提供することを目的とする。
【課題を解決するための手段】
【0018】
本発明に係るレーダ装置は、周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信するアンテナと、送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段を有することを特徴とする。
【0019】
本発明に係る物標検出方法は、周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出し、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を取得し、グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索し、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離するステップを有することを特徴とする。
【0020】
対向車に対する場合は、第1のビートはダウンビートに、第2のビートはアップビートに対応し、先行車に対する場合は、第1のビートはアップビートに、第2のビートはダウンビートに対応する。
【発明の効果】
【0021】
本発明に係るレーダ装置及び物標検出方法によれば、アップビートのピーク信号に対応しないダウンビートのピーク信号又はダウンビートのピーク信号に対応しないアップビートのピーク信号を分離することができるので、他の物標に対応したピーク信号に埋もれてしまったピーク信号を分離して検出することにより、物標の不検知を防止することが可能となった。
【0022】
また、本発明に係るレーダ装置及び物標検出方法によれば、特に、反射率の高い静止物の近傍にある他の物標が、静止物に対応したピーク信号に埋もれて検知できなくなるのを防止することが可能となった。
【発明を実施するための最良の形態】
【0023】
以下図面を参照して、本発明に係るレーダ装置及びレーダ装置における物標検出方法について説明する。ただし、本発明の技術的範囲はそれらの実施の形態には限定されず、特許請求の範囲に記載された発明とその均等物に及ぶ点に留意されたい。
【0024】
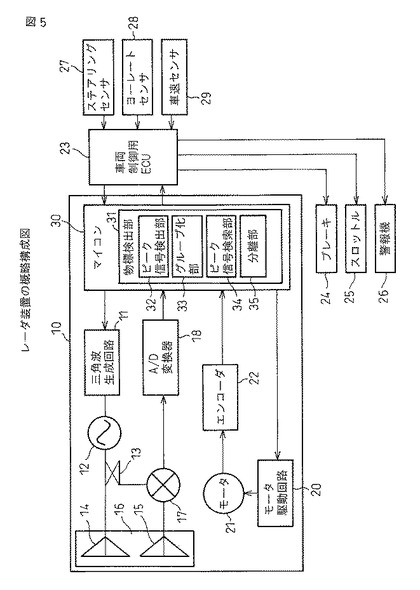
図5は、本発明に係るレーダ装置10の概略構成を示す図である。
【0025】
図5を用いて、メカスキャン方式のFM−CWレーダ装置を車両1の前方に搭載した場合について説明する。三角波発生回路11から電圧制御発信器(VCO)12に三角波からなる周期性のあるFM信号を供給して、搬送波に周波数変調を行なった後、送信アンテナ14から、車両前方へ送信波としての電波(ミリ波)を送信する。車両前方の物標に当たって反射した反射波を受信アンテナ15で受信し、これと、方向性結合器13を介して入力された送信波の一部とをミキサ17で混合することによりビート信号を得る。
【0026】
ビート信号はA/D変換器18でA/D変換され、マイコン30に入力される。マイコン30は、CPU、ROM、RAM等から構成され、入力されたビート信号に基づいて、物標の検出、検出された物標との距離及び相対速度を算出を行う物標検出部31を含んでいる。
【0027】
また、物標検出部31は、少なくとも、アップビート及びダウンビートにおけるピーク信号を検出するピーク信号検出部32、ピーク信号検出部32によって検出されたピーク信号の内、周波数のほぼ同じピーク信号をグループ化するグループ化部33、所定の条件に合致するピーク信号を検索するピーク信号検索部34、他の物標に対応するピーク信号の裾野に埋もれてしまっているピーク信号を分離する分離部35を有している。物標検出部31、ピーク信号検出部32、グループ化部33、ピーク信号検索部34及び分離部35は、ハードウエア及び/又はソフトウエアとしてマイコン30に実装されている。
【0028】
さらに、ステアリングホイールの操舵角を検出するステアリングセンサ27、車両が回転する速度を検出するヨーレートセンサ28、車速センサ29からの情報が車両制御用ECU(電子制御装置)23に送られる。車両制御用ECU23は、これらの情報と、マイコン30から送られる物標との距離や相対速度等に基づいて車両のブレーキ24、スロットル25、警報器26を制御する。例えば、物標との距離が一定距離以下にまで短縮された場合には、ブレーキ24をかけるとともに警報器26を鳴らし、その後、物標との距離が一定距離以上に広がった場合には、再びスロットル25を開放する。
【0029】
送信アンテナ14及び受信アンテナ15は、平面レンズや反射鏡からなるアンテナ構成部材16と一体化して形成されている。また、車両正面の所定の角度範囲で検出を行なうためには、メカスキャン方式ではアンテナを左右方向に振る必要がある。そのため、マイコン30からの信号に基づいてモータ駆動回路20によりモータ21を駆動して、送信アンテナ14及び受信アンテナ15を左右方向に振っている。具体的には例えば左右8°ずつ、合計16°の範囲をカバーできるように、これらのアンテナを同時に駆動する。さらに、モータ21からの信号がエンコーダ22を介してマイコン30に送られて、モータの動作状態がフィードバックされる。
【0030】
次に、FM−CWモードでの物標の検出原理について説明する。
【0031】
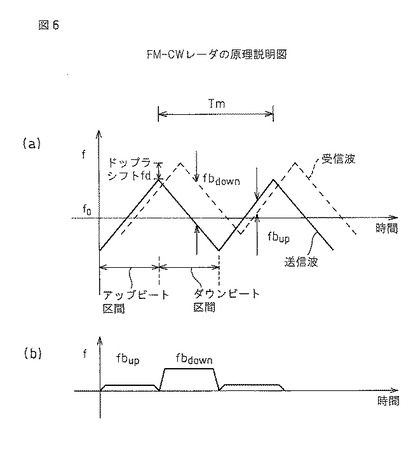
図6は、車両の送信波及び受信波の周波数fと時間との関係を示す図である。
【0032】
図6(a)において、実線の三角波は送信波の周波数を表す。送信波の中心周波数はf0、FM変調幅はΔf、繰り返し周期はTmである。この送信波は物標で反射されて図5の受信アンテナ15で受信され、破線の三角波が受信波の周波数を表す。同図から、送信波と受信波は飛行時間分だけずれていることが分かる。また、この受信波は物標との間の距離に応じて送信信号との周波数のずれ(ビート)を起こす。なお、物標が移動している場合は、ドップラ効果により受信信号の周波数がシフトする。
【0033】
図6(b)に、送信波と受信波のビート信号を三角波が上昇するアップビート区間、及び三角波が下降するダウンビート区間のそれぞれについて示す。ビート信号周波数は、物標が静止している場合のビート信号周波数frに、ドップラ周波数fdが重畳したものである。
【0034】
アップビート区間でのビート信号周波数fbup及びダウンビート区間でのビート信号周波数fbdownは、それぞれ、次式(1)及び(2)で表される。
【0035】
fbup=fr−fd (1)
fbdown=fr+fd (2)
また、ドップラ周波数fdと速度Vとの関係は次式(3)で表される。
【0036】
fd=2・V・f0/c (3)
このfbup、fbdownを減算処理などで飛行時間により生じる周波数差frを算出し、fbup、fbdownを加算処理などでドップラシフト分のずれfdを算出し、それらに定数を乗算することにより距離、及び相対速度に変換することができる。即ち、fr及びfbは、それぞれ次式(4)及び(5)で表される。
【0037】
fr=(fbup−fbdown)/2 (4)
fd=(fbup+fbdown)/2 (5)
したがって、同一の物標に関して、fbup、fbdownの両者が求められれば、fr、fdが算出でき、物標の距離及び相対速度を検出することができる。なお、物標との相対速度が0の場合には、アップビート区間でのビート信号周波数fbup及びダウンビート区間でのビート信号周波数fbdownは等しくなる。
【0038】
また、各区間のビート信号をサンプリングし、それぞれをフーリエ変換すると電力(パワー)が得られる。
【0039】
車両の前方に物標が複数存在する場合には、それぞれの物標がビームを反射するので、1つの物標に対して、アップビートとダウンビートによるピーク周波数が複数存在する。マイコン30は、アップビートとダウンビートのそれぞれにおいて、複数のピーク周波数の中から、同じ周波数を持ったピークのうち、最も高いピーク(最もパワーの大きいピーク信号)を中心にグループ化(グルーピング)を行う。次に、マイコン30は、アップビートにおけるグループとダウンビートにおけるグループとのペアリングを行い、ペアリング処理された2つのグループのビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出する。
【0040】
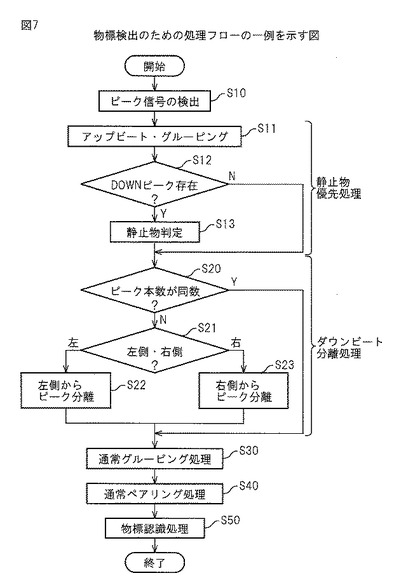
図7は、図1(a)の状況における物標検出のための処理フローの一例を示す図である。
【0041】
図7に記載される処理フローは、予めマイコン30のROM等に記憶されたプログラムに従って、マイコン30のCPUが、図5に示すレーダ装置10の各要素及び車両制御ECU23等と協働して実行するものとする。また、以下の説明において、レーダ装置10を搭載した車両1は、図1(a)と同様の状況にあるものとする。
【0042】
最初に、送信アンテナ14からは、車両1の正面を0°として、左右に8°ずつ、合計16°の範囲でビームを均一の角度毎に計16本放射して、この範囲で、マイコン30(ピーク信号検出部32)は、アップビート及びダウンビートのピーク信号を検出する(S10)。
【0043】
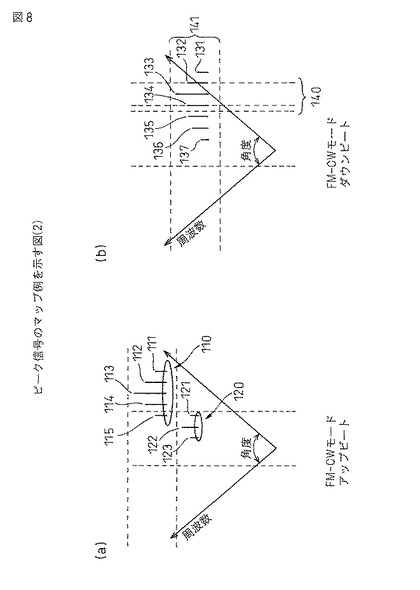
図8は、前述した、マイコン30(ピーク信号検出部32)によって検出されたピーク信号のマップの一例を示す図である。図8(a)はアップビートにおけるピーク信号のマップを示し、図8(b)はダウンビートにおけるピーク信号のマップを示している。図8において、アンテナから離れる方向が周波数を示しており、角度はアンテナから放射されるビームの角度を示している。
【0044】
次に、マイコン30(グループ化部33)は、アップビートのピーク信号のグループ化(グルーピング)を行う(S11)。
【0045】
マイコン30(グループ化部33)は、ほぼ同じ周波数にあるピーク信号に対してグルーピングを行い、図8(a)の場合には、ピーク信号111〜115をグループ110、ピーク信号121〜123をグループ120とする。ここで、グループ110のうち最もパワーの大きいピーク信号113をグループ110の頂点ピークといい、同様に、ピーク信号122をグループ120の頂点ピークと言う。
【0046】
次に、マイコン30(ピーク信号検索部34)は、ダウンビートにおけるピーク信号中に、各グループの頂点ピークの±1ビーム以内で、車両1の車速のドップラ周波数分ずれた箇所に、ピーク信号が存在するか否かの判断を行う(S12)。
【0047】
S12において、ピーク信号が存在すれば、静止物判定を行い(S13)、ピーク信号が存在しなければ静止物が存在しないものとして、S30へ進む。S11〜S13は、静止物優先処理に対応するステップである。
【0048】
例えば、図8(a)のグループ110に関して言えば、図8(b)において、頂点ピーク113が検出されたビームの±1本以内140、且つグループ110に含まれるピーク信号111〜115と同じ周波数から、車速1のドップラ周波数分ずれた周波数帯域141において、ピーク信号が存在するか否かの判断を行い、ピーク信号133を検出する。したがって、マイコン30は、グループ110が静止物に対応したピーク信号であると、優先して判定することができる。
【0049】
S13において静止物判定がなされた場合には、マイコン30(分離部35)は、アップビートのグループと、S12で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内(例えば、誤差範囲内、以下同じ。)の周波数を有するピーク信号の本数が同数か否かの判断を行う(S20)。S20では、両者のピーク信号の本数が同数であれば、埋もれているピーク信号は無いと判断し、両者のピーク信号の本数が異なっていれば、埋もれているピーク信号が存在すると判断する。
【0050】
次に、マイコン30(分離部35)は、S12で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の内(ピーク信号131〜137)、S12で検出されたピーク信号133の左右のピーク信号の数を検出し、本数の多い方にピーク信号が埋もれていると判断する(S21)。
【0051】
次に、マイコン30(分離部35)は、S21で左と判断された場合には、左側から埋もれているピーク信号を分離し(S22)、S22で右と判断された場合には、右側から埋もれているピーク信号を分離する(S23)。なお、埋もれているピーク信号の分離については後述する。S20〜S23は、ダウンビートにおけるピーク信号の分離処理に対応するステップである。
【0052】
例えば、図8の場合、図8(a)におけるグループ110には5本のピーク信号が含まれるのに対して、S12で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号は、合計7本(ピーク信号131〜137)あり、両者は同数ではない。そこで、次にS21へ進み、ピーク信号133の右に2本(ピーク信号131及び132)、ピーク信号133の左に3本(ピーク信号135〜137)であるので、S22へ進んで、左側からピーク信号を分離する。
【0053】
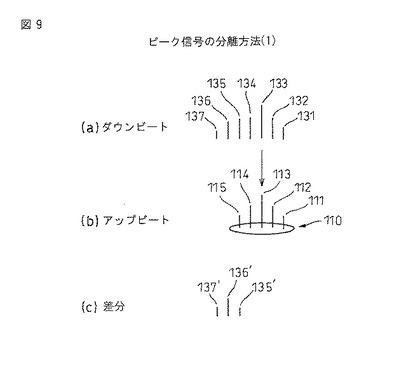
図9は、ピーク信号を分離する一つの方法を説明するための図である。
【0054】
図9(a)は、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を示し、図9(b)は、図8(a)に示すグループ110に含まれるピーク信号111〜115を示し、図9(c)は、図9(a)に示す7本のピーク信号から分離されたピーク信号を示している。
【0055】
図9に示す分離方法では、マイコン30(分離部35)は、S12で検出されたピーク信号133とグループ110の頂点ピーク113とのビーム位置を合わせて、図9(a)に示す7本のピーク信号から図9(b)に示す5本のピーク信号の差分を取るようにして、図9(c)のピーク信号を分離している。これによって、図9(a)に示す7本のピーク信号の内、静止物に係る図9(b)の5本のピークに対応したピーク信号が除かれ、図9(a)に示す7本のピーク信号の裾野に埋もれていたピーク信号135´、136´及び137´を分離することが可能となった。
【0056】
次に、マイコン30(物標検出部31)は、アップビート及びダウンビートにおいて、通常のグループ化(グルーピング)処理を行う(S30)。ここで、マイコン30は、静止物に係るピーク信号と判定されたアップビートのグループ110(図8(a)参照)と、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を、グルーピングにおいては考慮せず、その代わりに、S22又はS23で分離されたピーク信号135´、136´及び137´を考慮するように処理を行う。
【0057】
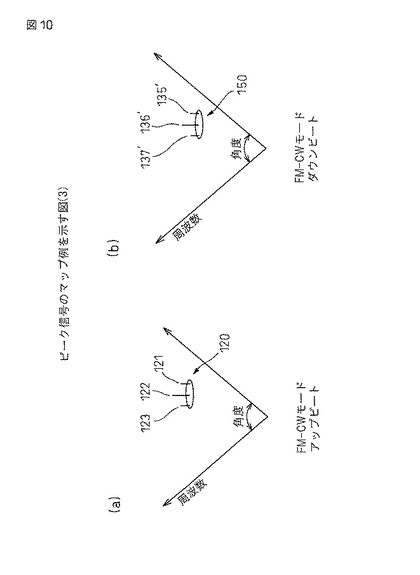
図10は、ピーク信号の分離後にグループ化を行った例を示す図である。図10(a)はアップビートにおけるピーク信号のマップを示し、図10(b)はダウンビートにおけるピーク信号のマップを示している。図10において、アンテナから離れる方向が周波数を示しており、角度はアンテナから放射されるビームの角度を示している。
【0058】
図10(a)に示されるように、図9(c)で分離された、ピーク信号135´〜137´がグループ150とされ、図10(b)に示されるように、ピーク信号121〜123が図8(a)と同様にグループ120とされている。
【0059】
次に、マイコン30(物標検出部31)は、ペアリング処理を行い(S40)、ペアリングされた2つのグループのビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出する物標認識処理を行って(S50)、一連の処理を終了する。図10の例では、グループ120とグループ150がペアリングされ、グループ120とグループ150のビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出される。
【0060】
本発明に係るレーダ装置10では、物標認識処理(S50)によって、グループ120及び150が、対向車に係るピーク信号であることが認識されるので、図1(b)に示すように対向車が不検知となることはなく、反射率の高い静止物の近傍にある物標でも正確に物標を認識することが可能となった。
【0061】
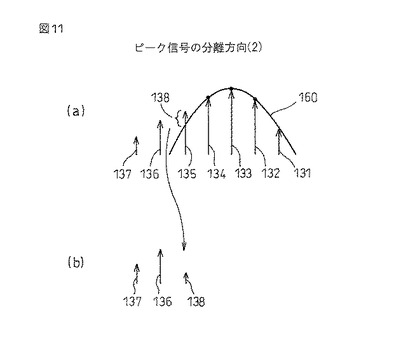
図11は、ピーク信号を分離する他の方法を説明するための図である。
【0062】
図11(a)は、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を示し、図11(b)は図11(a)に示す7本のピーク信号が分離されたピーク信号を示している。
【0063】
図11に示す分離方法では、7本のピーク信号131〜137の内の最もパワーが大きいピーク信号133と、その両側のピーク信号132及び134の3つの頂点を通る、2次近似曲線160を演算により求め、2次近似曲線160を超えた部分のピーク信号を分離するものである。
【0064】
図11(a)に示す例では、ピーク信号135の一部と、ピーク信号136及び137が2次近似曲線160を超えているので、ピーク信号135のうち2次近似曲線160を超えている部分138、ピーク信号136及び137を分離している(図11(b)参照)。
【0065】
図11に示す他の分離方法は、図7に示したダウンビートにおけるピーク分離処理(S20〜S23)の代わりに用いることができる。
【0066】
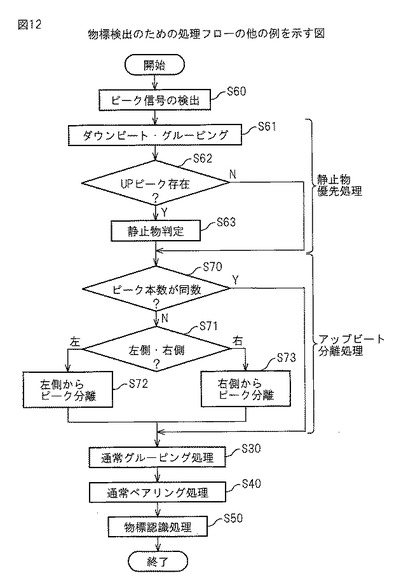
図12は、図3(a)の状況における物標検出のための処理フローの一例を示す図である。
【0067】
図12に記載される処理フローは、予めマイコン30のROM等に記憶されたプログラムに従って、マイコン30のCPUが、図5に示すレーダ装置10の各要素及び車両制御ECU23等と協働して実行するものとする。また、以下の説明において、レーダ装置10を搭載した車両1は、図3(a)と同様の状況にあるものとする。
【0068】
最初に、送信アンテナ14からは、車両1の正面を0°として、左右に8°ずつ、合計16°の範囲でビームを均一の角度毎に計16本放射して、この範囲で、マイコン30(ピーク信号検出部32)は、アップビート及びダウンビートのピーク信号を検出する(S60)。
【0069】
次に、マイコン30(グループ化部33)は、ダウンビートのピーク信号のグループ化(グルーピング)を行う(S61)。
【0070】
マイコン30(グループ化部33)は、同じ周波数にあるピーク信号に対してグルーピングを行い、例えば、図4(b)を参照すると、ピーク信号211〜215をグループ210、ピーク信号221〜223をグループ220とする。ここで、グループ210のうち最もパワーの大きいピーク信号213をグループ210の頂点ピークといい、同様に、ピーク信号222をグループ220の頂点ピークと言う。
【0071】
次に、マイコン30(ピーク信号検索部34)は、アップビートにおけるピーク信号中に、各グループの頂点ピークの±1ビーム以内で、車両1の車速のドップラ周波数分ずれた箇所に、ピーク信号が存在するか否かの判断を行う(S62)。
【0072】
S62において、ピーク信号が存在すれば、静止物判定を行い(S63)、ピーク信号が存在しなければ静止物が存在しないものとして、S70へ進む。S61〜S63は、静止物優先処理に対応するステップである。例えば、図4(a)を例にすれば、アップビートのピーク信号233を検出する。
【0073】
S63において静止物判定がなされた場合には、マイコン30(分離部35)は、ダウンビートのグループと、S62で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の本数が同数か否かの判断を行う(S70)。S70では、両者のピーク信号の本数が同数であれば、埋もれているピーク信号は無いと判断し、両者のピーク信号の本数が異なっていれば、埋もれているピーク信号が存在すると判断する。
【0074】
次に、マイコン30(分離部35)は、S62で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の内(ピーク信号231〜237)、S62で検出されたピーク信号233の左右のピーク信号の数を検出し、本数の多い方にピーク信号が埋もれていると判断する(S71)。
【0075】
次に、マイコン30(分離部35)は、S71で左と判断された場合には、左側から埋もれているピーク信号を分離し(S72)、S72で右と判断された場合には、右側から埋もれているピーク信号を分離する(S73)。なお、埋もれているピーク信号の分離については後述する。S70〜S73は、アップビートにおけるピーク信号の分離処理に対応するステップである。
【0076】
例えば、グループ210には5本のピーク信号が含まれるのに対して、S62で検出されたピーク信号233とほぼ同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号は、合計7本(ピーク信号231〜237)あり、両者は同数ではない。そこで、次にS71へ進み、ピーク信号233の右に2本(ピーク信号231及び232)、ピーク信号233の左に3本(ピーク信号235〜237)であるので、S72へ進んで、左側からピーク信号を分離する。
【0077】
以下の通常のグループ化(グルーピング)処理(S30)、ペアリング処理(S40)及び物標認識処理(S50)については、図7と同様であるので、説明を省略する。このように、図12に示した処理フローによって、先行車に係るピーク信号で良好に認識されるので、図3(b)に示すように先行車が不検知となることはなく、反射率の高い静止物の近傍にある物標でも正確に物標を認識することが可能となった。なお、図12に示す処理フローにおいても、ピーク信号の分離に関しては、図11の示す別の方式を採用することが可能である。
【0078】
また、上記の例では、車両の前方にレーダを設置する場合について説明したが、レーダの設置位置を後方や側方など、設置位置がどこであって本発明を適用することが可能である。
【図面の簡単な説明】
【0079】
【図1】(a)は静止物の近傍に対向車が存在する実際の場面の一例を示し、(b)はその場合の認識結果の一例を示す図である。
【図2】図1の場合におけるピーク信号のマップ例を示す図である。
【図3】(a)は静止物の近傍に先行車が存在する実際の場面の一例を示し、(b)はその場合の認識結果の一例を示す図である。
【図4】図3の場合におけるピーク信号のマップ例を示す図である。
【図5】本発明に係るレーダ装置10の概略構成を示す図である。
【図6】車両の送信波及び受信波の周波数fと時間との関係を示す図である。
【図7】図1(a)の状況における物標検出のための処理フローの一例を示す図である。
【図8】レーザ装置10によって検出されたピーク信号のマップの一例を示す図である。
【図9】ピーク信号を分離する一つの方法を説明するための図である。
【図10】ピーク信号の分離後にグループ化を行った例を示す図である。
【図11】ピーク信号を分離する他の方法を説明するための図である。
【図12】図3(a)の状況における物標検出のための処理フローの他の例を示す図である。
【符号の説明】
【0080】
10 FM−CWレーダ装置
11 三角波生成回路
12 電圧制御発信器
13 方向性結合器
14 送信アンテナ
15 受信アンテナ
16 アンテナ構成部材
17 ミキサ
18 A/D変換器
20 モータ駆動回路
21 モータ
22 エンコーダ
23 車両制御用ECU
24 ブレーキ
25 スロットル
26 警報機
27 ステアリングセンサ
28 ヨーレートセンサ
29 車速センサ
30 マイコン
31 物標検出部
32 ピーク信号検出部
33 グループ化部
34 ピーク信号検索部
35 分離部
【技術分野】
【0001】
本発明は、レーダ装置及び物標検出方法に関し、特に、車両や静止物等の物標からの反射波を利用して物標を検出するレーダ装置及び物標検出方法に関する。
【背景技術】
【0002】
近年、自動車の安全性の向上や、快適な運転の実現のために、自動車の高機能化が求められている。特に、走行中に前方に存在する車両や歩行者等との接触を回避すること、あるいは、前方を走行する車両に追随して自動運転を行うこと等を目的として、これらの物標を検出する車載用レーダ装置が重要となっている。
【0003】
このような車載用レーダ装置の内、FM−CW(周波数変調−連続波)レーダ方式を用いた装置では、送信用電圧制御発振器(VCO)に三角波のベースバンド信号を加え、周波数変調を行って、アンテナから自動車の前方に送信する。この場合、レーダ装置は、送信信号を自車両の前方の所定の角度範囲でアンテナをスキャンさせ、複数本のビームが所定の角度間隔で送信されるようにしている。また、レーダ装置では、物標にあたって反射した信号をアンテナで受信し、送信信号と受信信号とを混合してアップビート及びダウンビートの各ピーク信号を抽出し、各ピーク信号のグルーピングを行い、グルーピングから得られた物標のペアリングを行って物標との距離や相対速度を算出している。(例えば、特許文献1参照)。
【0004】
また、特許文献1に記載のレーザ装置では、これまでの物標の推移から今回の物標の位置を予測し、予測位置に基づいてグルーピングを行う過去対応グルーピングによって、埋もれてしまうピーク信号を検出するようにしている。
【0005】
また、FM−CW方式のレーダの信号処理装置において、アップビートとダウンビートにおいて、ピーク周波数の数が異なる場合には、欠落したピーク周波数のピーク幅内でパワーがピークとなる周波数をピーク周波数として、アップビートとダウンビートにおいてピーク周波数が同じになるようにして、ピーク周波数同士のペアリングを行うことが知られている(例えば、特許文献2参照)。
【0006】
【特許文献1】特開2003−149325号公報
【特許文献2】特開平11−316273号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、簡易的且つ正確な方法で、静止物の近傍に他の物標が存在する場合に、静止物に対応するピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とする方法は知られていなかった。
【0008】
以下、静止物の近傍に物標が存在する場合の具体的な例について説明する。
【0009】
図1(a)は静止物の近傍に対向車が存在する実際の場面の一例を示し、図1(b)はその場合の認識結果の一例を示す図である。また、図2(a)は図1(a)に対応したFM−CWモードのアップビートにおけるピーク信号のマップを示す図であり、図2(b)は図1(a)に対応したFM−CWモードのダウンビートにおけるピーク信号のマップを示す図である。
【0010】
図1(a)に示す状況においては、図2(a)に示すように、アップビートにおけるピーク信号のマップでは、5つのビーム信号111〜115によるグループ110と、3つのビーム信号121〜123によるグループ120が形成されるが、図2(b)に示すように、ダウンビートにおけるピーク信号のマップでは、静止物3に対応したピーク信号の裾野に、対向車2に対応するピーク信号が埋もれてしまい、1つのグループ130を形成してしまう。このような事象は、静止物3の反射率が高く、静止物3に対応したピーク信号の最大ピーク(ピーク信号113参照)が大きく、前面が流線型をしている等の理由によって対向車2の反射率が低く、対向車2に対応したピーク信号の最大ピーク(ピーク信号122参照)が小さい場合に顕著に現れる。
【0011】
通常、静止物判定において、アップビートのグループ110の最大ピークに対応するダウンビートのグループのピーク信号が存在する場合、グループ110及びグループ130は、静止物に対応するピーク信号であると認識され、他の識別処理から除かれてしまう。したがって、対向車2が認識されず、図1(b)に示しように、対向車が検知されないという不都合があった。
【0012】
図1及び図2では、対向車が静止物の付近に存在する状況について説明した。しかしながら、図3(a)に示す様に、先行車2´が静止物3の付近の存在する場合についても、静止物に対応するピーク信号の裾野に、先行車に対応するピーク信号が埋もれてしまう場合がある。
【0013】
図4(a)は図3(a)に対応したFM−CWモードのアップビートにおけるピーク信号のマップを示す図であり、図4(b)は図3(a)に対応したFM−CWモードのダウンビートにおけるピーク信号のマップを示す図である。
【0014】
図3(a)に示す状況においては、図4(b)に示すように、ダウンビートにおけるピーク信号のマップでは、5つのビーム信号211〜215によるグループ210と、3つのビーム信号221〜223によるグループ220が形成されるが、図4(a)に示すように、アップビートにおけるピーク信号のマップでは、静止物3に対応したピーク信号の裾野に、先行車2´に対応するピーク信号が埋もれてしまい、1つのグループ230を形成してしまう。このような事象は、静止物3の反射率が高く、静止物3に対応したピーク信号の最大ピーク(ピーク信号213参照)が大きく、後部が流線型をしている等の理由によって先行車2´の反射率が低く、先行車2´に対応したピーク信号の最大ピーク(ピーク信号222参照)が小さい場合に顕著に現れる。
【0015】
通常、静止物判定において、ダウンビートのグループ210の最大ピークに対応するアップビートのグループのピーク信号が存在する場合、グループ210及びグループ230は、静止物に対応するピーク信号であると認識され、他の識別処理から除かれてしまう。したがって、先行車2´が認識されず、図3(b)に示しように、対向車が検知されないという不都合があった。
【0016】
そこで、本発明は、静止物の近傍に他の物標が存在する場合においても、静止物に対応するピーク信号の裾野に埋もれてしまう物標に対応するピーク信号を検出することを可能とするレーダ装置及び物標検出方法を提供することを目的とする。
【0017】
また、本発明は、アップビートのピーク信号又はダウンビートのピーク信号が他の物標のピーク信号に埋もれてしまうような場合であっても、埋もれてしまったピーク信号を正確に検出することができるレーダ装置及び物標検出方法を提供することを目的とする。
【課題を解決するための手段】
【0018】
本発明に係るレーダ装置は、周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信するアンテナと、送信波と受信波を利用して第1のビートにおける複数の第1ピーク信号及び第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段と、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を得るグループ化手段と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から検索する検索手段と、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離する分離手段を有することを特徴とする。
【0019】
本発明に係る物標検出方法は、周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出し、複数の第2ピーク信号のグループ化を行って第2のビートにおけるグループ信号を取得し、グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索し、グループ信号に対応するピーク信号を複数の第1ピーク信号の中から分離するステップを有することを特徴とする。
【0020】
対向車に対する場合は、第1のビートはダウンビートに、第2のビートはアップビートに対応し、先行車に対する場合は、第1のビートはアップビートに、第2のビートはダウンビートに対応する。
【発明の効果】
【0021】
本発明に係るレーダ装置及び物標検出方法によれば、アップビートのピーク信号に対応しないダウンビートのピーク信号又はダウンビートのピーク信号に対応しないアップビートのピーク信号を分離することができるので、他の物標に対応したピーク信号に埋もれてしまったピーク信号を分離して検出することにより、物標の不検知を防止することが可能となった。
【0022】
また、本発明に係るレーダ装置及び物標検出方法によれば、特に、反射率の高い静止物の近傍にある他の物標が、静止物に対応したピーク信号に埋もれて検知できなくなるのを防止することが可能となった。
【発明を実施するための最良の形態】
【0023】
以下図面を参照して、本発明に係るレーダ装置及びレーダ装置における物標検出方法について説明する。ただし、本発明の技術的範囲はそれらの実施の形態には限定されず、特許請求の範囲に記載された発明とその均等物に及ぶ点に留意されたい。
【0024】
図5は、本発明に係るレーダ装置10の概略構成を示す図である。
【0025】
図5を用いて、メカスキャン方式のFM−CWレーダ装置を車両1の前方に搭載した場合について説明する。三角波発生回路11から電圧制御発信器(VCO)12に三角波からなる周期性のあるFM信号を供給して、搬送波に周波数変調を行なった後、送信アンテナ14から、車両前方へ送信波としての電波(ミリ波)を送信する。車両前方の物標に当たって反射した反射波を受信アンテナ15で受信し、これと、方向性結合器13を介して入力された送信波の一部とをミキサ17で混合することによりビート信号を得る。
【0026】
ビート信号はA/D変換器18でA/D変換され、マイコン30に入力される。マイコン30は、CPU、ROM、RAM等から構成され、入力されたビート信号に基づいて、物標の検出、検出された物標との距離及び相対速度を算出を行う物標検出部31を含んでいる。
【0027】
また、物標検出部31は、少なくとも、アップビート及びダウンビートにおけるピーク信号を検出するピーク信号検出部32、ピーク信号検出部32によって検出されたピーク信号の内、周波数のほぼ同じピーク信号をグループ化するグループ化部33、所定の条件に合致するピーク信号を検索するピーク信号検索部34、他の物標に対応するピーク信号の裾野に埋もれてしまっているピーク信号を分離する分離部35を有している。物標検出部31、ピーク信号検出部32、グループ化部33、ピーク信号検索部34及び分離部35は、ハードウエア及び/又はソフトウエアとしてマイコン30に実装されている。
【0028】
さらに、ステアリングホイールの操舵角を検出するステアリングセンサ27、車両が回転する速度を検出するヨーレートセンサ28、車速センサ29からの情報が車両制御用ECU(電子制御装置)23に送られる。車両制御用ECU23は、これらの情報と、マイコン30から送られる物標との距離や相対速度等に基づいて車両のブレーキ24、スロットル25、警報器26を制御する。例えば、物標との距離が一定距離以下にまで短縮された場合には、ブレーキ24をかけるとともに警報器26を鳴らし、その後、物標との距離が一定距離以上に広がった場合には、再びスロットル25を開放する。
【0029】
送信アンテナ14及び受信アンテナ15は、平面レンズや反射鏡からなるアンテナ構成部材16と一体化して形成されている。また、車両正面の所定の角度範囲で検出を行なうためには、メカスキャン方式ではアンテナを左右方向に振る必要がある。そのため、マイコン30からの信号に基づいてモータ駆動回路20によりモータ21を駆動して、送信アンテナ14及び受信アンテナ15を左右方向に振っている。具体的には例えば左右8°ずつ、合計16°の範囲をカバーできるように、これらのアンテナを同時に駆動する。さらに、モータ21からの信号がエンコーダ22を介してマイコン30に送られて、モータの動作状態がフィードバックされる。
【0030】
次に、FM−CWモードでの物標の検出原理について説明する。
【0031】
図6は、車両の送信波及び受信波の周波数fと時間との関係を示す図である。
【0032】
図6(a)において、実線の三角波は送信波の周波数を表す。送信波の中心周波数はf0、FM変調幅はΔf、繰り返し周期はTmである。この送信波は物標で反射されて図5の受信アンテナ15で受信され、破線の三角波が受信波の周波数を表す。同図から、送信波と受信波は飛行時間分だけずれていることが分かる。また、この受信波は物標との間の距離に応じて送信信号との周波数のずれ(ビート)を起こす。なお、物標が移動している場合は、ドップラ効果により受信信号の周波数がシフトする。
【0033】
図6(b)に、送信波と受信波のビート信号を三角波が上昇するアップビート区間、及び三角波が下降するダウンビート区間のそれぞれについて示す。ビート信号周波数は、物標が静止している場合のビート信号周波数frに、ドップラ周波数fdが重畳したものである。
【0034】
アップビート区間でのビート信号周波数fbup及びダウンビート区間でのビート信号周波数fbdownは、それぞれ、次式(1)及び(2)で表される。
【0035】
fbup=fr−fd (1)
fbdown=fr+fd (2)
また、ドップラ周波数fdと速度Vとの関係は次式(3)で表される。
【0036】
fd=2・V・f0/c (3)
このfbup、fbdownを減算処理などで飛行時間により生じる周波数差frを算出し、fbup、fbdownを加算処理などでドップラシフト分のずれfdを算出し、それらに定数を乗算することにより距離、及び相対速度に変換することができる。即ち、fr及びfbは、それぞれ次式(4)及び(5)で表される。
【0037】
fr=(fbup−fbdown)/2 (4)
fd=(fbup+fbdown)/2 (5)
したがって、同一の物標に関して、fbup、fbdownの両者が求められれば、fr、fdが算出でき、物標の距離及び相対速度を検出することができる。なお、物標との相対速度が0の場合には、アップビート区間でのビート信号周波数fbup及びダウンビート区間でのビート信号周波数fbdownは等しくなる。
【0038】
また、各区間のビート信号をサンプリングし、それぞれをフーリエ変換すると電力(パワー)が得られる。
【0039】
車両の前方に物標が複数存在する場合には、それぞれの物標がビームを反射するので、1つの物標に対して、アップビートとダウンビートによるピーク周波数が複数存在する。マイコン30は、アップビートとダウンビートのそれぞれにおいて、複数のピーク周波数の中から、同じ周波数を持ったピークのうち、最も高いピーク(最もパワーの大きいピーク信号)を中心にグループ化(グルーピング)を行う。次に、マイコン30は、アップビートにおけるグループとダウンビートにおけるグループとのペアリングを行い、ペアリング処理された2つのグループのビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出する。
【0040】
図7は、図1(a)の状況における物標検出のための処理フローの一例を示す図である。
【0041】
図7に記載される処理フローは、予めマイコン30のROM等に記憶されたプログラムに従って、マイコン30のCPUが、図5に示すレーダ装置10の各要素及び車両制御ECU23等と協働して実行するものとする。また、以下の説明において、レーダ装置10を搭載した車両1は、図1(a)と同様の状況にあるものとする。
【0042】
最初に、送信アンテナ14からは、車両1の正面を0°として、左右に8°ずつ、合計16°の範囲でビームを均一の角度毎に計16本放射して、この範囲で、マイコン30(ピーク信号検出部32)は、アップビート及びダウンビートのピーク信号を検出する(S10)。
【0043】
図8は、前述した、マイコン30(ピーク信号検出部32)によって検出されたピーク信号のマップの一例を示す図である。図8(a)はアップビートにおけるピーク信号のマップを示し、図8(b)はダウンビートにおけるピーク信号のマップを示している。図8において、アンテナから離れる方向が周波数を示しており、角度はアンテナから放射されるビームの角度を示している。
【0044】
次に、マイコン30(グループ化部33)は、アップビートのピーク信号のグループ化(グルーピング)を行う(S11)。
【0045】
マイコン30(グループ化部33)は、ほぼ同じ周波数にあるピーク信号に対してグルーピングを行い、図8(a)の場合には、ピーク信号111〜115をグループ110、ピーク信号121〜123をグループ120とする。ここで、グループ110のうち最もパワーの大きいピーク信号113をグループ110の頂点ピークといい、同様に、ピーク信号122をグループ120の頂点ピークと言う。
【0046】
次に、マイコン30(ピーク信号検索部34)は、ダウンビートにおけるピーク信号中に、各グループの頂点ピークの±1ビーム以内で、車両1の車速のドップラ周波数分ずれた箇所に、ピーク信号が存在するか否かの判断を行う(S12)。
【0047】
S12において、ピーク信号が存在すれば、静止物判定を行い(S13)、ピーク信号が存在しなければ静止物が存在しないものとして、S30へ進む。S11〜S13は、静止物優先処理に対応するステップである。
【0048】
例えば、図8(a)のグループ110に関して言えば、図8(b)において、頂点ピーク113が検出されたビームの±1本以内140、且つグループ110に含まれるピーク信号111〜115と同じ周波数から、車速1のドップラ周波数分ずれた周波数帯域141において、ピーク信号が存在するか否かの判断を行い、ピーク信号133を検出する。したがって、マイコン30は、グループ110が静止物に対応したピーク信号であると、優先して判定することができる。
【0049】
S13において静止物判定がなされた場合には、マイコン30(分離部35)は、アップビートのグループと、S12で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内(例えば、誤差範囲内、以下同じ。)の周波数を有するピーク信号の本数が同数か否かの判断を行う(S20)。S20では、両者のピーク信号の本数が同数であれば、埋もれているピーク信号は無いと判断し、両者のピーク信号の本数が異なっていれば、埋もれているピーク信号が存在すると判断する。
【0050】
次に、マイコン30(分離部35)は、S12で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の内(ピーク信号131〜137)、S12で検出されたピーク信号133の左右のピーク信号の数を検出し、本数の多い方にピーク信号が埋もれていると判断する(S21)。
【0051】
次に、マイコン30(分離部35)は、S21で左と判断された場合には、左側から埋もれているピーク信号を分離し(S22)、S22で右と判断された場合には、右側から埋もれているピーク信号を分離する(S23)。なお、埋もれているピーク信号の分離については後述する。S20〜S23は、ダウンビートにおけるピーク信号の分離処理に対応するステップである。
【0052】
例えば、図8の場合、図8(a)におけるグループ110には5本のピーク信号が含まれるのに対して、S12で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号は、合計7本(ピーク信号131〜137)あり、両者は同数ではない。そこで、次にS21へ進み、ピーク信号133の右に2本(ピーク信号131及び132)、ピーク信号133の左に3本(ピーク信号135〜137)であるので、S22へ進んで、左側からピーク信号を分離する。
【0053】
図9は、ピーク信号を分離する一つの方法を説明するための図である。
【0054】
図9(a)は、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を示し、図9(b)は、図8(a)に示すグループ110に含まれるピーク信号111〜115を示し、図9(c)は、図9(a)に示す7本のピーク信号から分離されたピーク信号を示している。
【0055】
図9に示す分離方法では、マイコン30(分離部35)は、S12で検出されたピーク信号133とグループ110の頂点ピーク113とのビーム位置を合わせて、図9(a)に示す7本のピーク信号から図9(b)に示す5本のピーク信号の差分を取るようにして、図9(c)のピーク信号を分離している。これによって、図9(a)に示す7本のピーク信号の内、静止物に係る図9(b)の5本のピークに対応したピーク信号が除かれ、図9(a)に示す7本のピーク信号の裾野に埋もれていたピーク信号135´、136´及び137´を分離することが可能となった。
【0056】
次に、マイコン30(物標検出部31)は、アップビート及びダウンビートにおいて、通常のグループ化(グルーピング)処理を行う(S30)。ここで、マイコン30は、静止物に係るピーク信号と判定されたアップビートのグループ110(図8(a)参照)と、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を、グルーピングにおいては考慮せず、その代わりに、S22又はS23で分離されたピーク信号135´、136´及び137´を考慮するように処理を行う。
【0057】
図10は、ピーク信号の分離後にグループ化を行った例を示す図である。図10(a)はアップビートにおけるピーク信号のマップを示し、図10(b)はダウンビートにおけるピーク信号のマップを示している。図10において、アンテナから離れる方向が周波数を示しており、角度はアンテナから放射されるビームの角度を示している。
【0058】
図10(a)に示されるように、図9(c)で分離された、ピーク信号135´〜137´がグループ150とされ、図10(b)に示されるように、ピーク信号121〜123が図8(a)と同様にグループ120とされている。
【0059】
次に、マイコン30(物標検出部31)は、ペアリング処理を行い(S40)、ペアリングされた2つのグループのビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出する物標認識処理を行って(S50)、一連の処理を終了する。図10の例では、グループ120とグループ150がペアリングされ、グループ120とグループ150のビート信号周波数の和から物標との距離が算出され、ビート信号周波数の差から物標との相対速度を算出される。
【0060】
本発明に係るレーダ装置10では、物標認識処理(S50)によって、グループ120及び150が、対向車に係るピーク信号であることが認識されるので、図1(b)に示すように対向車が不検知となることはなく、反射率の高い静止物の近傍にある物標でも正確に物標を認識することが可能となった。
【0061】
図11は、ピーク信号を分離する他の方法を説明するための図である。
【0062】
図11(a)は、図7のS11で検出された図8(b)に示すピーク信号133と同じ周波数又は同じ周波数から所定の範囲内の周波数を有する7本のピーク信号131〜137を示し、図11(b)は図11(a)に示す7本のピーク信号が分離されたピーク信号を示している。
【0063】
図11に示す分離方法では、7本のピーク信号131〜137の内の最もパワーが大きいピーク信号133と、その両側のピーク信号132及び134の3つの頂点を通る、2次近似曲線160を演算により求め、2次近似曲線160を超えた部分のピーク信号を分離するものである。
【0064】
図11(a)に示す例では、ピーク信号135の一部と、ピーク信号136及び137が2次近似曲線160を超えているので、ピーク信号135のうち2次近似曲線160を超えている部分138、ピーク信号136及び137を分離している(図11(b)参照)。
【0065】
図11に示す他の分離方法は、図7に示したダウンビートにおけるピーク分離処理(S20〜S23)の代わりに用いることができる。
【0066】
図12は、図3(a)の状況における物標検出のための処理フローの一例を示す図である。
【0067】
図12に記載される処理フローは、予めマイコン30のROM等に記憶されたプログラムに従って、マイコン30のCPUが、図5に示すレーダ装置10の各要素及び車両制御ECU23等と協働して実行するものとする。また、以下の説明において、レーダ装置10を搭載した車両1は、図3(a)と同様の状況にあるものとする。
【0068】
最初に、送信アンテナ14からは、車両1の正面を0°として、左右に8°ずつ、合計16°の範囲でビームを均一の角度毎に計16本放射して、この範囲で、マイコン30(ピーク信号検出部32)は、アップビート及びダウンビートのピーク信号を検出する(S60)。
【0069】
次に、マイコン30(グループ化部33)は、ダウンビートのピーク信号のグループ化(グルーピング)を行う(S61)。
【0070】
マイコン30(グループ化部33)は、同じ周波数にあるピーク信号に対してグルーピングを行い、例えば、図4(b)を参照すると、ピーク信号211〜215をグループ210、ピーク信号221〜223をグループ220とする。ここで、グループ210のうち最もパワーの大きいピーク信号213をグループ210の頂点ピークといい、同様に、ピーク信号222をグループ220の頂点ピークと言う。
【0071】
次に、マイコン30(ピーク信号検索部34)は、アップビートにおけるピーク信号中に、各グループの頂点ピークの±1ビーム以内で、車両1の車速のドップラ周波数分ずれた箇所に、ピーク信号が存在するか否かの判断を行う(S62)。
【0072】
S62において、ピーク信号が存在すれば、静止物判定を行い(S63)、ピーク信号が存在しなければ静止物が存在しないものとして、S70へ進む。S61〜S63は、静止物優先処理に対応するステップである。例えば、図4(a)を例にすれば、アップビートのピーク信号233を検出する。
【0073】
S63において静止物判定がなされた場合には、マイコン30(分離部35)は、ダウンビートのグループと、S62で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の本数が同数か否かの判断を行う(S70)。S70では、両者のピーク信号の本数が同数であれば、埋もれているピーク信号は無いと判断し、両者のピーク信号の本数が異なっていれば、埋もれているピーク信号が存在すると判断する。
【0074】
次に、マイコン30(分離部35)は、S62で検出されたピーク信号と同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号の内(ピーク信号231〜237)、S62で検出されたピーク信号233の左右のピーク信号の数を検出し、本数の多い方にピーク信号が埋もれていると判断する(S71)。
【0075】
次に、マイコン30(分離部35)は、S71で左と判断された場合には、左側から埋もれているピーク信号を分離し(S72)、S72で右と判断された場合には、右側から埋もれているピーク信号を分離する(S73)。なお、埋もれているピーク信号の分離については後述する。S70〜S73は、アップビートにおけるピーク信号の分離処理に対応するステップである。
【0076】
例えば、グループ210には5本のピーク信号が含まれるのに対して、S62で検出されたピーク信号233とほぼ同じ周波数又は同じ周波数から所定の範囲内の周波数を有するピーク信号は、合計7本(ピーク信号231〜237)あり、両者は同数ではない。そこで、次にS71へ進み、ピーク信号233の右に2本(ピーク信号231及び232)、ピーク信号233の左に3本(ピーク信号235〜237)であるので、S72へ進んで、左側からピーク信号を分離する。
【0077】
以下の通常のグループ化(グルーピング)処理(S30)、ペアリング処理(S40)及び物標認識処理(S50)については、図7と同様であるので、説明を省略する。このように、図12に示した処理フローによって、先行車に係るピーク信号で良好に認識されるので、図3(b)に示すように先行車が不検知となることはなく、反射率の高い静止物の近傍にある物標でも正確に物標を認識することが可能となった。なお、図12に示す処理フローにおいても、ピーク信号の分離に関しては、図11の示す別の方式を採用することが可能である。
【0078】
また、上記の例では、車両の前方にレーダを設置する場合について説明したが、レーダの設置位置を後方や側方など、設置位置がどこであって本発明を適用することが可能である。
【図面の簡単な説明】
【0079】
【図1】(a)は静止物の近傍に対向車が存在する実際の場面の一例を示し、(b)はその場合の認識結果の一例を示す図である。
【図2】図1の場合におけるピーク信号のマップ例を示す図である。
【図3】(a)は静止物の近傍に先行車が存在する実際の場面の一例を示し、(b)はその場合の認識結果の一例を示す図である。
【図4】図3の場合におけるピーク信号のマップ例を示す図である。
【図5】本発明に係るレーダ装置10の概略構成を示す図である。
【図6】車両の送信波及び受信波の周波数fと時間との関係を示す図である。
【図7】図1(a)の状況における物標検出のための処理フローの一例を示す図である。
【図8】レーザ装置10によって検出されたピーク信号のマップの一例を示す図である。
【図9】ピーク信号を分離する一つの方法を説明するための図である。
【図10】ピーク信号の分離後にグループ化を行った例を示す図である。
【図11】ピーク信号を分離する他の方法を説明するための図である。
【図12】図3(a)の状況における物標検出のための処理フローの他の例を示す図である。
【符号の説明】
【0080】
10 FM−CWレーダ装置
11 三角波生成回路
12 電圧制御発信器
13 方向性結合器
14 送信アンテナ
15 受信アンテナ
16 アンテナ構成部材
17 ミキサ
18 A/D変換器
20 モータ駆動回路
21 モータ
22 エンコーダ
23 車両制御用ECU
24 ブレーキ
25 スロットル
26 警報機
27 ステアリングセンサ
28 ヨーレートセンサ
29 車速センサ
30 マイコン
31 物標検出部
32 ピーク信号検出部
33 グループ化部
34 ピーク信号検索部
35 分離部
【特許請求の範囲】
【請求項1】
周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信するアンテナと、
前記送信波と前記受信波を利用して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段と、
前記複数の第2ピーク信号のグループ化を行って前記第2のビートにおけるグループ信号を得るグループ化手段と、
前記グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索する検索手段と、
前記対応するピーク信号を前記複数の第1ピーク信号の中から分離する分離手段と、
を有することを特徴とするレーダ装置。
【請求項2】
前記分離手段は、前記グループ信号に含まれるピーク信号の本数に基づいて、前記グループ信号に対応するピーク信号を分離する、請求項1に記載のレーダ装置。
【請求項3】
前記分離手段は、前記検索手段によって検索されたピーク信号と同じ周波数を有する前記複数の第1ピーク信号において、前記検索手段によって検索されたピーク信号の左右のピーク信号の本数の違いに基づいて、前記グループ信号に対応するビート信号の分離を行う、請求項1に記載のレーダ装置。
【請求項4】
前記分離手段は、前記検索手段によって検索されたピーク信号と同じ周波数を有する前記複数の第1ピーク信号の頂点を結ぶ2次近似曲線を利用して、前記グループ信号に対応するビート信号の分離を行う、請求項1に記載のレーダ装置。
【請求項5】
周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出し、
前記複数の第2ピーク信号のグループ化を行って前記第2のビートにおけるグループ信号を取得し、
前記グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索し、
前記対応するピーク信号を前記複数の第1ピーク信号の中から分離する、
ステップを有することを特徴とする物標分離方法。
【請求項1】
周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信するアンテナと、
前記送信波と前記受信波を利用して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出するピーク検出手段と、
前記複数の第2ピーク信号のグループ化を行って前記第2のビートにおけるグループ信号を得るグループ化手段と、
前記グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索する検索手段と、
前記対応するピーク信号を前記複数の第1ピーク信号の中から分離する分離手段と、
を有することを特徴とするレーダ装置。
【請求項2】
前記分離手段は、前記グループ信号に含まれるピーク信号の本数に基づいて、前記グループ信号に対応するピーク信号を分離する、請求項1に記載のレーダ装置。
【請求項3】
前記分離手段は、前記検索手段によって検索されたピーク信号と同じ周波数を有する前記複数の第1ピーク信号において、前記検索手段によって検索されたピーク信号の左右のピーク信号の本数の違いに基づいて、前記グループ信号に対応するビート信号の分離を行う、請求項1に記載のレーダ装置。
【請求項4】
前記分離手段は、前記検索手段によって検索されたピーク信号と同じ周波数を有する前記複数の第1ピーク信号の頂点を結ぶ2次近似曲線を利用して、前記グループ信号に対応するビート信号の分離を行う、請求項1に記載のレーダ装置。
【請求項5】
周波数変調をかけた送信波を物標に送信するとともに、物標で反射された受信波を受信して、第1のビートにおける複数の第1ピーク信号と、第2のビートにおける複数の第2ピーク信号を検出し、
前記複数の第2ピーク信号のグループ化を行って前記第2のビートにおけるグループ信号を取得し、
前記グループ信号に対応するピーク信号を前記複数の第1ピーク信号の中から検索し、
前記対応するピーク信号を前記複数の第1ピーク信号の中から分離する、
ステップを有することを特徴とする物標分離方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−38841(P2010−38841A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−204683(P2008−204683)
【出願日】平成20年8月7日(2008.8.7)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月7日(2008.8.7)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]