
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから送られる信号を開口合成することにより被探知目標を探知するレーダ装置が、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから送られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから送られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
【解決手段】送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから送られる信号を開口合成することにより被探知目標を探知するレーダ装置が、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから送られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから送られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置、例えば、車載用レーダ(以降、探知測距装置の具体例としてレーダ装置を取り上げる)等には、複数の送信用センサ素子から構成される送信用センサアレイと、複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせ、実効的に受信用のセンサアレイの開口を拡大する技術を採用する事で、性能を犠牲にせずに小型化を実現した装置がある。このような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成等と呼ばれる。開口合成を用いたレーダ装置は、複数の送信センサ素子から(時分割多重、周波数分割多重、或いは、符号分割多重の何れかの方式、又は、その組み合わせで)プローブ信号を放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、各受信センサ素子で受信された信号を合成することにより実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−155171号公報
【特許文献2】特開2006−98181号公報
【特許文献3】特開2007−155381号公報
【特許文献4】特開平11−231040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の開口合成レーダでは、或る特定の条件下においては、被探知目標を正確に探知できないという問題があった。この様な条件としては、例えば、複数の物体がレーダから殆ど同じ視線方向相対距離(以下、単に距離と記す)に存在し、それぞれが殆ど同じ視線方向相対速度(以下、単に速度と記す)で運動している様なケースがある。この様なケースを具体的に考えるならば、渋滞状況等(複数の物体が、近接した位置を小さな速度差で動いている)、日常的に頻発するシーンでも正確に目標を探知できなくなる可能性がある。車載用レーダとしての開口合成レーダはこのような問題点を抱えている。
【0005】
本発明の一態様に係る課題は、このような問題点に鑑み、被探知目標を正確に探知する開口合成技術を実現することにある。
【課題を解決するための手段】
【0006】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0007】
第1の態様は、送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから得られる信号を開口合成することにより被探知目標を探知するレーダ装置に関する。この第1の態様に係るレーダ装置は、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナ
から得られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから得られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
【0008】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0009】
上記各態様によれば、被探知目標を正確に探知する開口合成技術を提供することができる。
【図面の簡単な説明】
【0010】
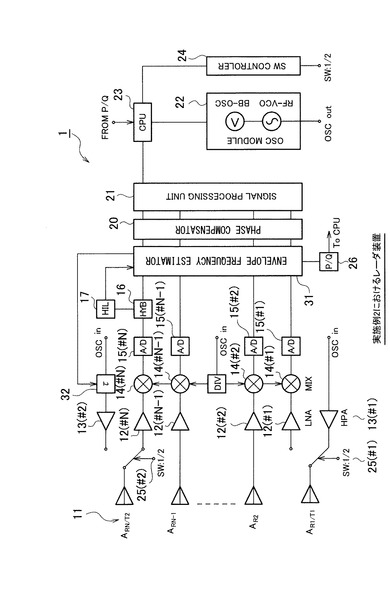
【図1】実施例1のレーダ装置の構成を示すブロック図。
【図2】送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャート。
【図3】開口合成の成立条件を示す概念図。以下、AR1/T1、ARN/T2を送受共用素子として動作させるタイムスロット(図2のタイミングチャートに従った場合、観測時間:[0、Tf]、[Tf、3Tf])を、それぞれFM1、FM2、或いは、測定時間A、Bと記す。
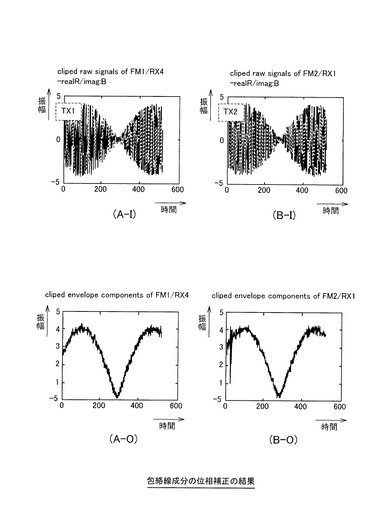
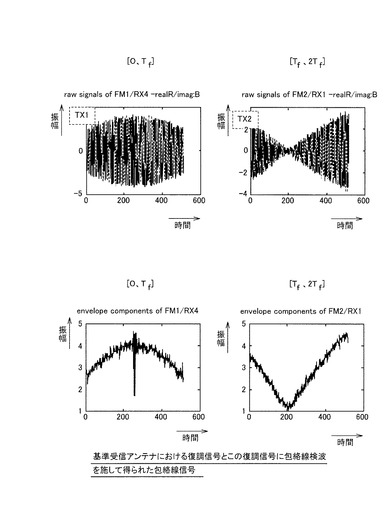
【図4】包絡線検波部への入力信号と包絡線検波部から出力される包絡線信号とを示す図。
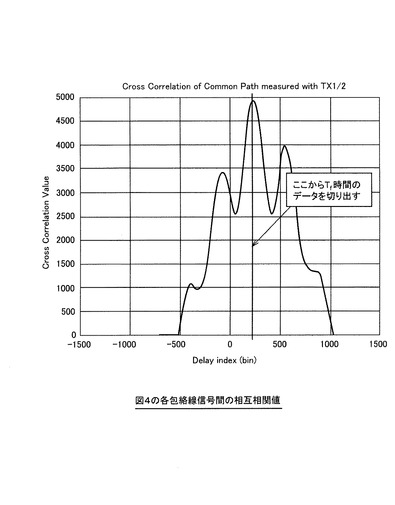
【図5】図4に示す各包絡線信号間の相互相関値を示すグラフ。
【図6】包絡線成分の位相補正の結果を示すグラフ。
【図7】実施例1とは異なるレーダ装置の構成を示すブロック図。
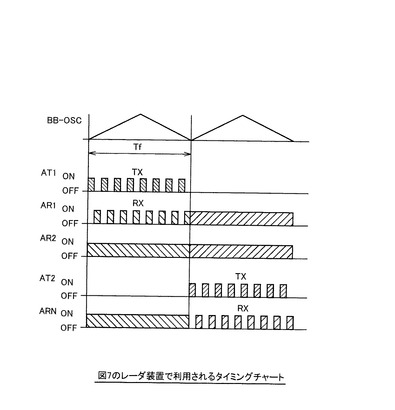
【図8】図7のレーダ装置で利用されるタイミングチャート。
【図9】シーン設定例を示す図。
【図10】図7のレーダ装置を用いて測角を実施した結果を示すグラフ。
【図11】図10で利用した周波数ドメインの信号を時間ドメイン信号に変換し、測角を実施した結果を示すグラフ。
【図12】図11の時間ドメインの信号に対し、時間ドメインで位相差をキャンセルした場合の測角結果を示すグラフ。
【図13】基準受信アンテナにおける復調信号とこの復調信号に包絡線検波を施して得られた包絡線信号(包絡線成分)とを併記したグラフ。
【図14】実施例1のレーダ装置を用いて時間ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
【図15】実施例1のレーダ装置を用いて周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
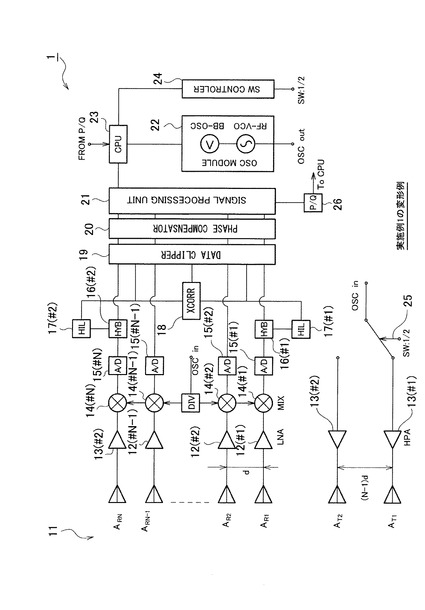
【図16】実施例2におけるレーダ装置1の構成を示すブロック図。
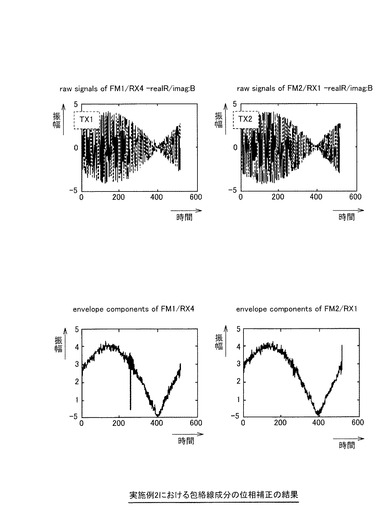
【図17】実施例2における包絡線成分の位相補正の結果を示すグラフ。
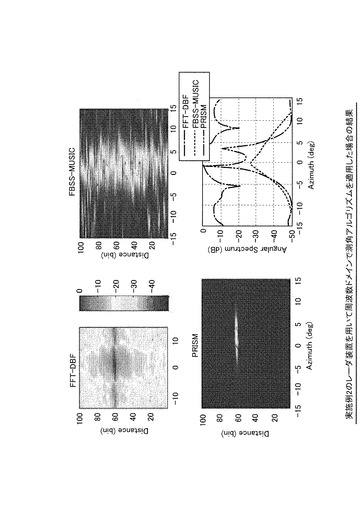
【図18】実施例2のレーダ装置を用いて周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
【図19】実施例1のレーダ装置の変形例を示す図。
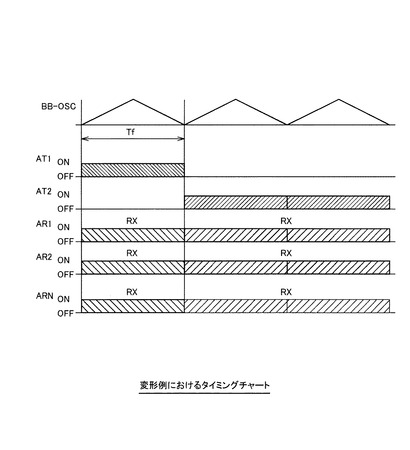
【図20】変形例におけるタイミングチャート。
【発明を実施するための形態】
【0011】
以下、一実施形態として、プローブ信号にFMCW(Frequency Modulated Continuous
Wave)を採用したレーダ装置(以降、単にレーダ装置と表記する)について具体例を挙
げ説明を行う。実施形態としてのレーダ装置は、例えば、車両等に搭載される。しかしながら、本実施形態におけるレーダ装置は、それを搭載する装置、システムを限定するものではない。以下に挙げた各実施例はそれぞれ例示であり、本開示は以下の各実施例の構成に限定されない。
【実施例1】
【0012】
以下、実施形態としてのレーダ装置の第1実施例について説明する。
【0013】
[装置構成]
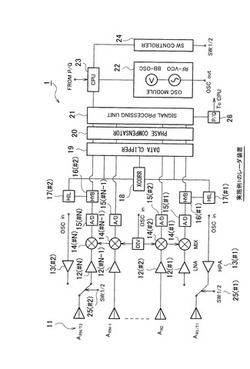
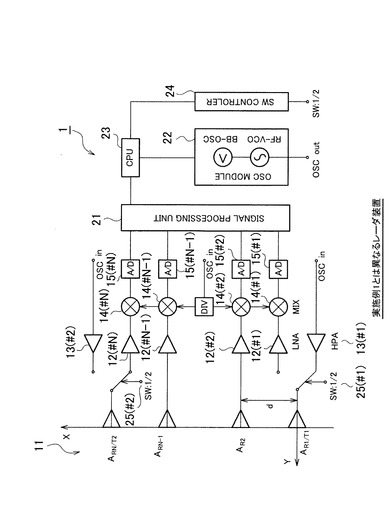
図1は、実施例1のレーダ装置の構成を示すブロック図である。実施例1におけるレーダ装置1は、図1に示すように、アレイアンテナ11、低雑音増幅器(以降、LNAと表記する)12、電力増幅器(以降、HPAと表記する)13、ミキサ(図1に示すMIX)14、アナログデジタル(以降、A/Dと表記する)変換器15(一時的にデジタルデ
ータを格納するメモリを実装する様に構成しても良い)、分岐器(以降、HYBと表記する)16、包絡線検波部(図1に示すHIL)17、相互相関計算部(図1に示すXCORR)18、データクリッパ19、位相補正部20、信号処理部21、発振モジュール22、CPU(Central Processing Unit)23、スイッチコントローラ24、スイッチ2
5、送信サイクル設定器(図1に示すP/Q)26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0014】
発振モジュール22は、DDS(Direct Digital Synthesizer)等、デジタル的に直接FMCW信号を生成可能なものでも良いが、具体例では一般的なアナログ式の回路構成、即ち、ベースバンド発振器(図1に示すBB−OSC)と高周波電圧制御発振器(図1に示すRF−VCO、勿論、電流制御型でも良い)とを組み合わせたもので考えておく。発振モジュール22では、ベースバンド発振器から出力される基準信号が高周波電圧制御発振器へ送られ、高周波電圧制御発振器によりその基準信号を用いて周波数変調されたシステムリファレンス信号が出力される。この基準信号には例えば三角波が利用される。
【0015】
HPA13は、送信アンテナに対応する処理系統に設けられる。図1の例によれば、送信アンテナとして利用されるアンテナはAT1及びAT2の2つであるため、HPA13は2つ(HPA13(#1)及びHPA13(#2))設けられている。HPA13は、発振モジュール22から出力されたシステムリファレンス信号を増幅し、送信アンテナとして選択されている側のアンテナから目標探知用のプローブ信号として出力される。
【0016】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。実施例1では、直線状に配列された各アンテナ素子のうちの両端の2つのアンテナ素子は、送信用及び受信用として共用され、それ以外のアンテナ素子は受信用のみとして利用される。以降、送信及び受信で共用されるアンテナ素子を共用アンテナAR1/T1又
は共用アンテナARN/T2と表記する。
【0017】
本発明を説明する際の具体例としては、概念の把握が簡単であるから、共用アンテナは、スイッチ25により時分割で送信用又は受信用に切り替えられる構成を採用する。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように実施例1におけるレーダ装置では、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0018】
スイッチ25は、スイッチコントローラ24からの制御信号に応じて、共用アンテナを送信用として利用するか、受信用として利用するかを切り替える。具体的には、スイッチ25(#1)は、共用アンテナAR1/T1をHPA13(#1)に接続するか、LNA12
(#1)に接続するかを切り替える。共用アンテナAR1/T1はHPA13(#1)に接続
されると送信アンテナAT1として動作し、LNA12(#1)に接続されると受信アンテナAR1として動作する。同様に、スイッチ25(#2)は、共用アンテナARN/T2をHP
A13(#2)に接続するか、LNA12(#N)に接続するかを切り替える。共用アンテナARN/T2はHPA13(#2)に接続されると送信アンテナAT2として動作し、LN
A12(#N)に接続されると受信アンテナARNとして動作する。
【0019】
スイッチコントローラ24は、CPU23から送られて来る送信サイクル情報、及び発振モジュール22のベースバンド発振器から出力される基準信号の周期Tfに応じて、ス
イッチ25の切り替えタイミングを制御する。
【0020】
送信サイクル設定器26は、信号処理部21からの要求により基準信号の周期Tf又は
送信サイクル情報(P/Q)の変更指示をCPU23へ送る。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として(但し、個々の共用アンテナを1つのタイム
スロットの中で送受用途に切り替える際のデューティー比は無視)、送信アンテナAT1を利用するタイムスロットの比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。
【0021】
スイッチコントローラ24は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。続いて、スイッチコントローラ24は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用ア
ンテナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNと
して利用する。
【0022】
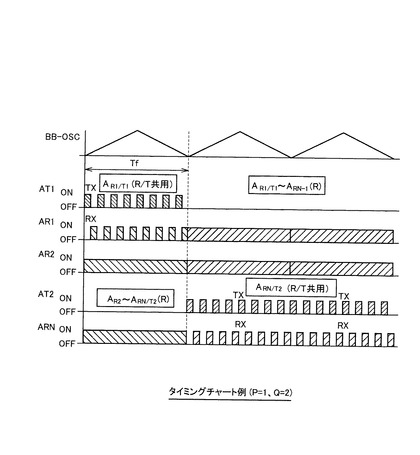
図2は、送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャートである。図2の例によれば、[0、Tf]の間、送信アンテナAT1は
所定の周期でプローブ信号を放射し、受信アンテナARNは継続的にエコー信号を受信する。[Tf、3Tf]の間には、送信アンテナAT2は所定の周期でプローブ信号を放射し、受信アンテナAR1は継続的にエコー信号を受信する。このタイミングチャートを参照し、測定開始時刻を0として、本実施形態に基づく「装置としての動作の1周期」を示すと、タイムスロット[0、PTf]ではAR1/T1を共用アンテナ、AR2〜ARNを受信アンテナとして動作させ、タイムスロット[PTf、(P+Q)Tf]ではARN/T2を共用アンテナ、AR1〜ARN-1を受信アンテナとして動作させる。
【0023】
LNA12は、受信アンテナに対応する処理系統に設けられる。図1の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ25(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ25(#2)の切り替えにより受信アンテナARNに接続される。LNA12は、接続される受信アンテナから受信信号を受け、この受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0024】
ミキサ14は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール22から送られるシステムリファレンス信号と混合させることにより、高周波エコー信号をベースバンド信号に変換する。
【0025】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリン
グ周波数でデジタルベースバンド信号に変換する。以降、このデジタルベースバンド信号を単に復調信号と表記する。
【0026】
HYB16は、受信アンテナAR1及びARNで受信された信号の復調信号を処理するために、受信アンテナAR1及びARNに対応する各処理系統にそれぞれ設けられる。具体的には、HYB16(#1)はA/D変換器15(#1)に接続され、HYB16(#2)はA/D変換器15(#N)に接続される。言い換えれば、HYB16は、アレイアンテナ11に於いて空間位相が等しくなる送信アンテナ及び受信アンテナの組み合わせにおける受信アンテナで受信された信号を処理する処理系統に設けられる(従って、HYBとHILとを実装する箇所をアレイアンテナの最外縁の受信アンテナに限定する必要はない)。開口合成操作は、このように等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせで受信された信号を基準として実行される。以降、このように開口合成の基準として採用される送信アンテナ及び受信アンテナの組み合わせを基準組み合わせと表記し、基準組み合わせにおける送信アンテナ及び受信アンテナを基準送信アンテナ及び基準受信アンテナと表記する。なお、実施例1では、基準送信アンテナAT1と基準受信アンテナARNの組み合わせと基準送信アンテナAT2と基準受信アンテナAR1との組み合わせが基準組み合わせとなる(具体的な他の基準組み合わせとしては、基準送信アンテナAT1と基準受信アンテナAR1の組み合わせと基準送信アンテナAT2と基準受信アンテナARNとの組み合わせ等が考えられる。この場合、基準とする位相長はゼロになる)。
【0027】
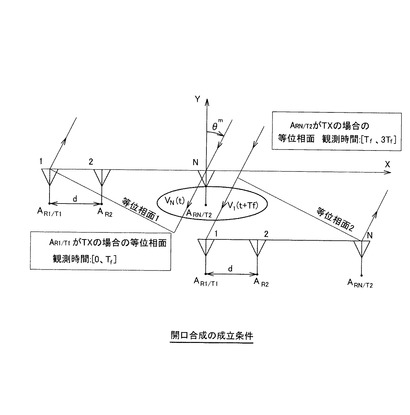
図3は、図2のタイミングチャートに沿って装置を動作させた場合を例に採って、開口合成が成立する条件を示した概念図である。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間Aとも
表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、3Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している。この図から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0028】
HYB16は、A/D変換器15から出力される復調信号を包絡線検波部17方向とデータクリッパ19方向とに分岐する。
【0029】
包絡線検波部17は、基準受信アンテナで受信された信号の復調信号を処理するために各HYB16にそれぞれ接続される。包絡線検波部17は、HYB16で分岐された信号の包絡線成分を検出する。以降、包絡線検波部17で取得した包絡線成分を包絡線信号と表記する場合もある。包絡線検波部17は、例えば、信号処理部21で行われるフーリエ変換(FFT(Fast Fourier Transformation)等)の最小周波数分解能より長い周期を
持つ信号成分の存在を検出した場合、取得された包絡線信号を相互相関計算部18に送る。なお、包絡線検波部17は、当該フーリエ変換の最小周波数分解能より長い周期を持つ包絡線成分の存在を検出した場合、上述の送信サイクル情報(P及びQ)でのプローブ信号放射をCPU23に要求するように送信サイクル設定器26へ依頼するようにしてもよい(P、Q、及び、Tfの値を変更する事も含む)。なお、包絡線検波部17は、例えば
、ダイオード検波器、直交復調器、ヒルベルト変換器、ウェーブレット変換器、フィルタバンク等を利用して実現される。
【0030】
図4は、包絡線検波部への入力信号と包絡線検波部から出力される包絡線信号とを示す図である。図4は、図2のタイミングチャートを用いた場合であって、被探知目標を2つに設定し、各被探知目標の諸元(距離、角度、速度)をT1(40メートル(m)、0度
(deg)、10キロメートル毎時(km/h))、T2(40(m)、3(deg)、
12.5(km/h))に設定し、SNR(Signal-to-Noise Ratio)を30デシベル(
dB)に設定した場合を示す。
【0031】
図4では、上段に示されるグラフ(A−I)及び(B−I)が包絡線検波部17へ入力される信号をそれぞれ示し、下段に示されるグラフ(A−O)及び(B−O)が包絡線検波部17から出力される包絡線信号をそれぞれ示す。このうち、グラフ(A−I)及び(A−O)は図2の例の[0、Tf]間に得られる復調信号とそれに対して施される信号処
理の結果を示し、グラフ(B−I)及び(B−O)は図2の例の[Tf、3Tf]間に得られる復調信号とそれに対して施される信号処理の結果を示す。
【0032】
相互相関計算部18は、基準送信アンテナAT1に対応する基準受信アンテナARNで受信された信号に関する包絡線信号と、基準送信アンテナAT2に対応する基準受信アンテナAR1で受信された信号に関する包絡線信号と、の相互相関を取る。この相互相関を取るにあたり、相互相関計算部18は、測定時間[0、Tf]に処理された包絡線信号をメモリ(
図示せず)に保持し、次の測定時間[Tf、3Tf]に処理された包絡線信号の位相が先の包絡線信号の位相と一致するタイミングを遅延量(タイムラグ)として検出する。なお、相互相関計算部18は、相互相関を取るにあたり、両包絡線信号の長さを合わせるために、信号長が短い、測定時間[0、Tf]に取得された包絡線信号の無信号区間をゼロパデ
ィングする。各包絡線信号の占める時間長は、CPUから送られる送信サイクル情報(図1に示すP/Q)により決まる値である。なお、今後特に断らないが、時間軸を持つグラフに於ける「時間」とは、測定時間そのものを表しているのではなく、データとしてのインデックスを表しており、従って、実際の測定時間の相違と無関係に、ゼロからカウントが開始している。
【0033】
図5は、図4に示す各包絡線信号間の相互相関値を示すグラフである。図5の例では、240付近の遅延インデックスにおいて、相関値が最大となっているため、相互相関計算部18は遅延量を240と決定する。このことは、図4においても示されている。具体的には、図4のグラフ(B−O)に於いて時間インデックスが240以降の波形と、同図のグラフ(A−O)の有信号部の波形とは位相が一致している。
【0034】
相互相関計算部18は、このように基準組み合わせの復調信号の包絡線成分間の遅延量を検出すると、この遅延量をデータクリッパ19へ送る。相互相関計算部18は、相互相関において明確なピークが得られない場合、即ち、相互相関のピーク値が所定閾値より低い場合、或いは、同じ程度の大きさのピークが何カ所も出現する様な場合、基準信号の周期Tf又は送信サイクル情報(P/Q)の変更指示をするように送信サイクル設定器26
へ要求する様にしても良い。
【0035】
データクリッパ19は、各タイムスロットに於いて各受信アンテナで受信された信号の復調信号を各A/D変換器15からそれぞれ受け、それぞれメモリに保持する(即ち、このメモリは上述した「装置としての動作の1周期」に得られるA/D変換器15からの出力をタイムスロット毎及び受信系(アンテナ〜A/D変換器)毎にアクセス可能な形で保存しておく事ができ、更に、後述の各操作に於いては所望のタイムスロットに於ける所望の受信系からのデータが、適切に出力する事ができるものとする)。
データクリッパ19は、相互相関計算部18から送られた遅延量に基づいて、入力された各復調信号の包絡線成分の位相を合わせる。具体的には、データクリッパ19は、[Tf
、3Tf]間の各復調信号から当該遅延量以降のTf時間分の信号をそれぞれ切り出す。これにより、[0、Tf]間の各復調信号と包絡線の位相が一致するデータを、[Tf、3Tf]間の各復調信号から取得する事ができる(即ち、異なるタイムスロットに於いて取得
したデータ列から、包絡線の位相が一致したデータ列を得られる)。データクリッパ19
は、このように位相補正された各復調信号を位相補正部20へ送る。
【0036】
図6は、包絡線成分の位相補正の結果を示すグラフである。図4と比較すれば明白なように、データクリッパ19により切り出された各(基準受信アンテナ由来の)信号の包絡線は(図6の(B−O))、[0、Tf]間の復調信号の包絡線(図6の(A−O))と
位相が揃えられている。
【0037】
位相補正部20は、データクリッパ19から送られて来る包絡線成分の位相が揃った各復調信号を受け(なお、ここで用いた具体例に於いて、データクリッパから送られてくるデータの長さは、タイムスロット[0、Tf]のそれと同じである)、これら各復調信号
の残留位相誤差を補正する。具体的には、各回路素子の特性バラツキ等も含めてベースバンド信号に含まれる残留位相誤差の影響をキャンセルするために、後述する式(2.4)を用いて(時間ドメインに於ける)補正量を算出し、この補正量に応じて、データクリッパで包絡線の位相が合う様に切り取られた測定時間[Tf、3Tf]における各復調信号の位相誤差を他の測定時間[0、Tf]での各復調信号の位相誤差にあわせるように補正す
る(但し、包絡線の位相を揃えたデータであれば、時間ドメインのデータにFFTを掛けて周波数ドメインのデータに変換し、式(1.13)式で補正量を算出し、周波数ドメインに於いて上述の様な補正処理を実施しても良い)。このように残留位相誤差の補正が行われた各信号は、信号処理部21へ送られる。
【0038】
信号処理部21は、位相補正部20から送られる各信号を開口合成し、開口合成された信号にDBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、PRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法等のような既知の角度推定アルゴリズム(以降、端に測角アルゴリズムと表記する)を適用する。なお、時間ドメインで開口合成された信号をフーリエ変換(FFT(Fast Fourier Transformation))等により周波数ドメインの信号に変換し、この周波数ド
メインの信号に対して測角アルゴリズムを適用するようにしてもよい。開口合成手法及び測角アルゴリズムは周知の技術を用いればよいため、ここでは説明を省略する。なお、信号処理部21は、測角アルゴリズムにおいて、自己相関成分を含まない相関行列を用いるようにしてもよい。
【0039】
また、信号処理部21は、包絡線検波部17から包絡線そのものの周波数、乃至、この包絡線を構成する信号成分の個々の周波数の情報を取得し、所定の方法により包絡線成分(或いは、上記の各量)を取得するようにしてもよい。この場合、信号処理部21は、この周波数成分(或いは、上記の各量)が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにしてもよい。
【0040】
[実施例1における作用及び効果]
以下、上述の実施例1におけるレーダ装置1の作用及び効果について説明する。
【0041】
まず、実施例1における作用及び効果を説明する前に、実施例1とは異なるレーダ装置の動作及びその問題点を数式に基づいて検証する。以下の説明は、図7に示す構成、及び、図8に示すタイミングチャートを利用する例を用いる。図7は、実施例1とは異なるレーダ装置の構成を示すブロック図である。図8は、図7のレーダ装置で利用されるタイミングチャートを示す。なお、以下のような数式による検証は、ここで新たに開示されるものである。また、基準信号の周期は、上記実施例1と同様にTfと表記する。
【0042】
図8の送信サイクル情報によれば、測定時間[0、Tf]では、共用アンテナAR1/T1が送信アンテナ又は受信アンテナとして利用され、受信アンテナAR2からARN-1及び共用アンテナARN/T2が受信アンテナとして利用される。また、測定時間[Tf、2Tf]では、
共用アンテナARN/T2が送信アンテナ又は受信アンテナとして利用され、受信アンテナAR2からARN-1及び共用アンテナAR1/T1が受信アンテナとして利用される。
【0043】
ここで、各時間区間に於けるプローブ信号、即ち、送信アンテナAT1及びAT2から放射されるプローブ信号をvTX1(t)、vTX2(t)とおくと、各プローブ信号はそれぞれ以下の式(1.1a)及び(1.1b)のように表される。ωCは発振モジュール22を構
成するRF−VCOのキャリア角周波数を示す。また、vTX2(t)のΔφは送信時間差
による位相ずれを示す。なお、以降の説明では、角周波数と周波数とを区別しない。
【0044】
【数1】

上記式(1.1a)及び(1.1b)におけるh(t)は、発振モジュール22を構成するBB−OSCからの基準信号f(x)に対して上記式(1.2)で定義される。説明の便宜のため、BB−OSCのから出力される信号の時間の原点を半周期ずらすと、f(x)は以下の式(1.3)で表される。Δωは片側変調帯域幅である。
【0045】
【数2】
ここで、M個の被探知目標がレーダ装置1に対して視線方向相対距離rm(m)、角度
θm(deg)(時不変)なる位置を視線方向相対速度vm(km/h)で運動し続けるものと仮定する。これにより、各受信アンテナで受信されたエコー信号vTX1RX,n(t)、
vTX2RX,n(t)は、式(1.5)、(1.6a)、(1.6b)の定義を用いて、以下
の式(1.4a)及び(1.4b)で表せる(n=1〜N、m=1〜M)。受信信号vTX1RX,n(t)は、測定時間[0、Tf]に於いて、送信アンテナAT1から放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。受信信号vTX2RX,n(t)は、測定時間[Tf、2Tf]に於いて、送信アンテナAT2から放射されたプロ
ーブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。なお、nTX1n(t)及びnTX2n(t)は加法性ガウス雑音である。
【0046】
【数3】
各受信信号は、ミキサ14でシステムリファレンス信号(発振モジュール22の出力信号)とミキシングされることによりベースバンド信号に変換される。このベースバンド信号は、A/D変換器15によりサンプリング周波数ωS(例えば、ωS=Kωf、ωf=2π/Tf、Kはサンプル数)でデジタル信号に変換される。続いて、信号処理部21がこれ
らデジタルベースバンド信号(以降、復調信号と表記する)に以下のような信号処理を施すことにより、被探知目標の角度及び距離を推定する。
【0047】
ここで、各受信アンテナでの受信信号から得られる各復調信号vTX1RX,n(t)、vTX2RX,n(t)は、復調等に伴う位相誤差を各プローブ信号に起因する量として捉え、まとめてΔψTX1(t)及びΔψTX2(t)で示すと、以下の式(1.7a)及び(1.7b)のように示される。なお、以降の各信号の表記における時間変数tは、δt=Tf/Kで離
散化された時間を動くものとする。例えば、[0、Tf]時間では、時間変数tは[0、
δt、2δt、・・・、(K−1)δt]を動く。
【0048】
【数4】
実際に市場に存在するレーダ装置の諸元に基づいて、上記式(1.7a)及び(1.7b)から誤差と空間位相を除いた状態で、FMのダウンチャープによる位相項を取り出して整理すると、以下の式(1.8)のようになる。なお、参考とした装置諸元は、探知距離範囲(最小探知距離及び最大探知距離)が1〜200(m)、探知速度範囲が1(km/h)〜200(km/h)、Δωが約50メガヘルツ(MHz)、基準信号(RF−VCOへの変調入力信号)の周期Tfが1ミリ秒(msec)である。
【0049】
【数5】
式(1.8)を参照し、距離遅延による周波数成分(FMのアップチャープでは符号が異なる)である−4Δωτm0/TfをωBmと置き、定数項ωCτm0+Δωτm0をΔψTX1(
t)及びΔψTX2(t)に含める事で、式(1.7a)及び式(1.7b)は、以下の式
(1.9a)及び(1.9b)の様に書き換えることができる。
【0050】
【数6】
このような2つの測定時間帯[0、Tf]及び[Tf、2Tf]で取得された各復調信号
vTX1RX,n(t)及びvTX2RX,n(t)に対して開口合成が成立する条件は、基準組み合わせにおける各復調信号vTX1RX,N(t)、vTX2RX,1(t)の位相長が双方の測定時間で一致することである。よって、開口合成を成立させるには、上記式(1.9a)及び(1.9b)で示される位相誤差ΔψTX1(t)及びΔψTX2(t)の扱いが問題となる。
【0051】
図7のレーダ装置では信号処理部21に於いて開口合成操作を行う。先ず、各測定時間に得られた信号にフーリエ変換を施すことによって周波数ドメインのデータに変換する。これを復調信号vTX1RX,n(t)を例に採って具体的に示すと以下のようになる。周波数
インデックスがk(k=−K/2+1〜K/2)番目の要素は、以下の式(1.10)で与えられるから、m番目の目標に対応する信号成分のフーリエ変換結果は、空間位相を除いて式(1.11a)で示すことができる。但し、式(1.11a)の左辺は、例えば、下記式(1.11b)のように定義した場合には、式(1.11c)等により得られる。なお、一般性を失わずg0TX1=1とおいて良い。
【0052】
【数7】
以上の考察を踏まえると、上記式(1.9a)及び(1.9b)に示した時間ドメインの信号から変換された周波数ドメイン信号は、以下の式(1.12a)及び(1.12b)のように表わすことができる。
【0053】
【数8】
続いて、信号処理部21は、基準組み合わせに対応する各復調信号を用いて、各周波数インデックスkにおける位相誤差dψ(k)を、下記の式(1.13)を用いて取得する(ここで、基準組み合わせに対して空間位相が等しくなる事に注意)。
【0054】
最後に、信号処理部21は、位相誤差dψ(k)に基づく補正量exp[−jdψ(k)]を、全てのn及びkについてVTX2RX,n(k)と掛けることにより、VTX2RX,n(k)の位相誤差をVTX1RX,n(k)の位相誤差ΔψTX1(t)と合わせ、結果、開口合成を成立させていた。即ち、図7のレーダ装置の信号処理部21によって得られる開口合成信号は、下記式(1.14a)及び(1.14b)で示される(簡単の為、加法性雑音成分の影響は省略している)。
【0055】
【数9】
上記式(1.14a)及び(1.14b)のような各信号から被探知目標の角度を推定するためには、基準受信アンテナの各信号の空間位相が等しいことに基づいて、開口合成を実施した後の基準受信アンテナの信号を以下の式(1.15)によって定義する。更に、先に定義した基準受信アンテナの信号と、他の各受信アンテナによって受信された信号とを要素とするベクトルV(k)、雑音信号ベクトルN(k)、角度行列A、及び、目標信号ベクトルX(k)を、以下の式(1.16a)、(1.16b)、(1.16c)、及び、(1.16d)で定義することによって、開口合成された信号に対し、式(1.17)のようなアレー信号処理の基本関係式を導く(言うまでも無いが、各式は周波数インデックスがkである信号要素に関する表記である)。
【0056】
【数10】
信号処理部21は、式(1.17)のように定義される信号ベクトルをDBF、MUSIC、PRISM等の既知の測角アルゴリズムを用いて処理する。
【0057】
しかしながら、被探知目標が同一距離に複数存在し、かつ、各被探知目標が小さな速度差で運動している場合には、上述の如く数式を用いて示した、本実施例1と異なるレーダ装置の動作では正確に被探知目標を探知できないという問題点が判明した。
【0058】
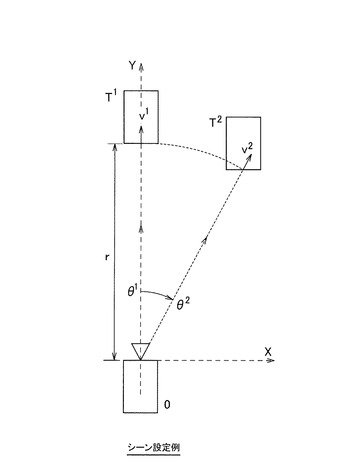
図9は、シーン設定例を示す図である。以下、図9で示されるシーン設定を用いて、図7で示すレーダ装置の問題点を数式で検証する。図9のシーン設定では、2台の被探知目標T1、T2が、図7のレーダ装置Oから同距離(r1=r2=r)で角度θ1及びθ2の位置に存在し、それぞれ速度v1及びv2で運動している。
【0059】
ここで、計算例で用いたレーダ装置の諸元について記しておくと、発振モジュール22から出力されるシステムリファレンス信号は、キャリア周波数が76ギガヘルツ(GHz)(=ωC/2π)、RF−VCOへの変調入力信号(基準信号)の基本周期Tfが4(msec)、片側変調帯域が50(MHz)(=Δω/2π)のFMCW信号である。また、アンテナ素子数Nが4、アンテナ素子間隔dが1.8λ(λはキャリア信号の波長)、サンプル数Kが512であるとした。更に、図9のシーン設定における各被探知目標の諸元(距離、角度、速度)をT1:(40(m)、0(deg)、10(km/h))、T2:(40(m)、3(deg)、11(km/h))と、SNRを30(dB)と仮定した。なお、目標諸元については、計算例毎に若干変更する事がある。
【0060】
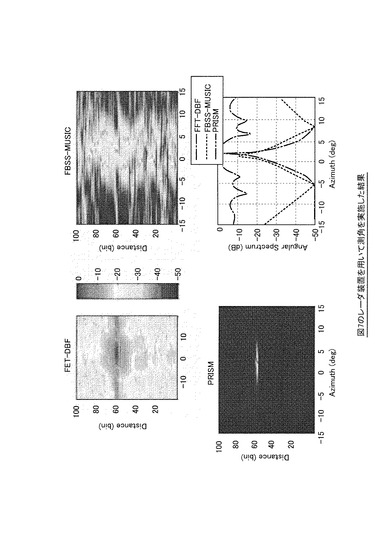
このような各諸元を用いて、図7に示す実施例1とは異なるレーダ装置において、先述の手順に従って開口合成操作を行い、周波数ドメインでの測角を行ったところ図10のような結果となった。
【0061】
図10は、図7に示す実施例1とは異なるレーダ装置における測角結果を示すグラフである。図10によれば、被探知目標の距離は概ね正確に推定できているものの、0度及び3度にそれぞれ存在する被探知目標が1.5度付近に存在する1つの被探知目標として誤推定されている。
【0062】
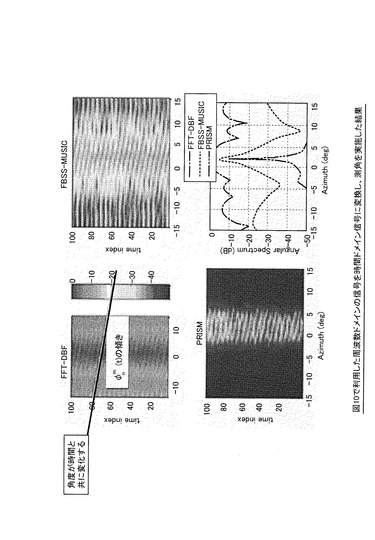
そこで、このような誤推定の原因を特定するために、上記の合成信号(式(1.17))に逆フーリエ変換を施すことにより当該合成信号を時間ドメインの信号に再変換した後に、この再変換された時間ドメインの信号に測角アルゴリズムを適用した。図11は、図10で利用した周波数ドメインの信号から変換された、時間ドメインの信号に対する測角結果を示すグラフである。DBF、MUSIC及びPRISMの測角結果を示すグラフ(左上グラフ、右上グラフ、左下グラフ)によれば、本来、時間的に不変であるはずの目標角度(図では空間位相φTX1/2,mn(t)の傾きと記している)が時間に応じて変化している。
【0063】
この例では、2つの被探知目標の相対速度差は1(km/h)(≒0.28(m/sec))であるから、Tf(=4(msec))時間毎にこの速度差によって生じる被探知
目標間の距離差は約1.1(mm)に過ぎず、装置の距離分解能(≒0.75(m))と比べて遥かに小さな値である。言い替えれば、2つの測定時間を通して、各被探知目標の距離は同じとみなすことができるため、距離遅延によって定まる周波数ωB1及びωB2は、同一の値ωBとなると考えて良い(式(2.1)参照。具体的には、周波数ωB1及びωB2
は40(m)で概ね13(kHz)となる)。以上より、上記式(1.9a)及び(1.9b)は以下の式(2.2a)及び(2.2b)のように書き換えることができる。
【0064】
【数11】
一方、ドップラー周波数に対応する位相及び空間位相について考えると、例えば上記式(2.2a)におけるvTX1RX,n(t)の総和項のexpの括弧内は、上記式(2.3a
)で表わすことができる。この式(2.3a)によれば、時間的に不変の空間位相(2π/λ)(n−1)dsin(θm)が、時間に従って変化するドップラー位相推移(2π
/λ)2vmtの影響を受け、各目標の速度、時間、角度の組み合わせによって、時間的
に複雑な挙動を示す事が分かる(なお、ドップラー周波数は10(km/h)で1.4(kHz)程度である)。結果、図11に示した如く、時間ドメインにおいて角度推定を行った際に観察された現象(時間的に不変であるはずの角度が時間に応じて変化する)が生じると考えられる。そして、このような現象が上述のような問題点(図10で示されるような誤推定)を招いていると考えられる。
【0065】
そこで、このような問題点を解決する手法として、先ず、時間ドメインで信号の位相差をキャンセルすることを考えた。このようにすれば、時間に応じて変化するドップラー位相推移の影響も含めて補正することができる筈である。具体的には、基準組み合わせに対する上記式(2.2)を用い、以下の式(2.4)によって補正量を算出する。そして、vTX2RX,n(t)の全てのn及びtについて、この補正量を用いたexp[−jdψ(t
)]を掛けることで、vTX2RX,n(t)の位相誤差をvTX1RX,n(t)の位相誤差と共通の位相誤差ΔψTX1(t)に合わせた後、合成開口を行う。
【0066】
【数12】
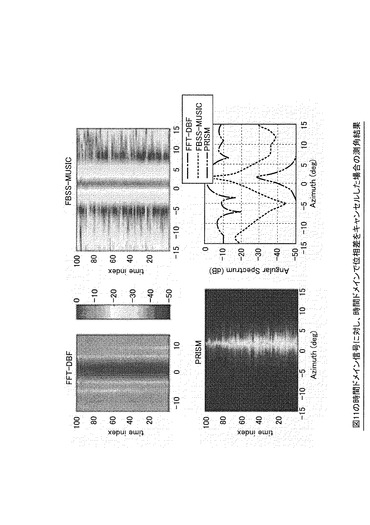
図12は、このようにして得られた信号に測角アルゴリズムを適用した結果を示すグラフである。図12によれば、時間ドメインで信号の位相差をキャンセルすることにより、予想通り角度の時間変化が打ち消されている。しかしながら、やはり、被探知目標の個数と角度は誤推定されたままである。
【0067】
そこで、若干視点を変えて、開口合成問題を完全に解決する手法を考えた。即ち、上記式(2.2a)及び(2.2b)によれば、距離遅延によって定まる周波数が13(kHz)程度であったのに対して、ドップラー周波数は1.4(kHz)と10分の1程度であるため、前記式は、キャリア周波数exp(jωBt)に総和の時間変項で振幅変調が
掛かっているものと見なせる事に注目した。即ち、上記式(2.2a)において、vTX1R
X,n(t)の総和項のみを取り出して整理すると、下記式(2.5)のように示すことが
できる。
【0068】
【数13】
この式(2.5)の最右辺は、2つの目標からの信号が合成された結果、実質上、複素成分exp()と実数成分cos()との積として表せる1つの信号として振る舞う事を意味している。即ち、複素成分は2つの被探知目標の平均ドップラー周波数と平均角度を持つ1つの被探知目標からの信号として、また、実数成分は2つの被探知目標のドップラー信号間のビート信号として解釈できるので、結局、先述の擬似的な単1目標に由来する複素信号に先述のビート信号で振幅変調(AM)が掛かった信号が上式の実体である −
これが、時間ドメインに於いて、位相補正から開口合成を行う事で、角度の時間変化は補正出来たにも拘わらず、目標の個数と角度の誤推定までは解決されなかった原因である。なお、元の被探知目標のドップラー信号間のビート信号(AM成分)は、式(2.5)(一般的には、式(1.9)や式(2.2))の包絡線として求められる事は明らかである。
【0069】
図13は、上記の結論の妥当性を検証する為、基準受信アンテナにおける復調信号とこの復調信号に包絡線検波を施して得られた包絡線信号(AM成分)とを併記したグラフである。各復調信号(式(2.2a)及び(2.2b))は上部に示され、各包絡線信号は下部に示されている。
【0070】
図13によれば、2つの測定時間[0、Tf]、[Tf、2Tf]で得られた受信信号の
位相が包絡線の影響によって大きく異なっていることが表されている。また、各包絡線信号の周波数(バイポーラ信号と見なした時)は、約73(Hz)であり、装置の最小周波数分解能である500(Hz)より遥かに小さいため、周波数ドメインで位相補正を施しても正確に開口合成ができないことも明らかである。
【0071】
そこで、実施例1におけるレーダ装置1では、上述のような開口合成を破綻させ、探知精度を劣化させる包絡線の影響を回避するために、各基準受信アンテナで受信された信号の復調信号の包絡線成分をそれぞれ検出する(包絡線検波部17)。続いて、各包絡線成分の位相の相互相関を取ることにより、各包絡線成分の位相が一致する遅延量(タイムラグ)を取得する(相互相関計算部18)。なお、相互相関計算部18による相互相関処理は、下記式(3.1)のように示される。この取得された遅延量に基づき、各受信信号から包絡線成分の位相が揃った信号部分を取得し(データクリッパ19)、更に、位相補正部20で残留位相誤差の補正を行い(包絡線の位相が揃ったデータに対しては周波数ドメインで残留位相の補正を実施しても良いので、データクリッパからの出力信号を信号処理部21に於いて周波数ドメインの信号に変換し、残留位相補正を行っても良い)、開口合成操作及び測角アルゴリズムを適用する(信号処理部21)。
【0072】
【数14】
このようにして、実施例1によれば、各基準送信アンテナAT1及びAT2から放射されたプローブ信号に対応するエコー信号を受信した各基準受信アンテナARN及びAR1で受信された信号の包絡線情報に基づいて、各測定時間([0、Tf]及び[Tf、3Tf])にお
いて開口合成が成立する様に、位相の揃った信号部分を取得することができる。結果、任意の状況において実効的な受信アンテナの個数を増加させ、小型で多くのアンテナ(センサ)を備えたレーダ装置を実現することができる。即ち、実際の受信センサ数で分離可能な数より多くの目標に対して、精度の良い角度推定を実現することができる。
【0073】
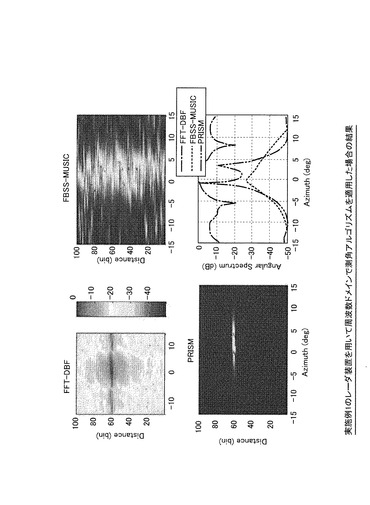
図14は、実施例1のレーダ装置において時間ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。例えば、測角アルゴリズムとしてPRISMを用いた場合には、図4のシーン設定における各被探知目標の角度(0度及び3度)が正確に推定されている。
【0074】
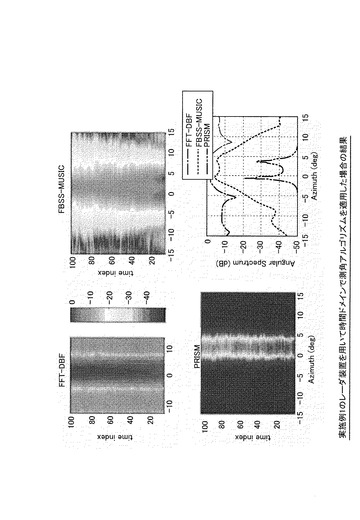
図15は、実施例1のレーダ装置において周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。この場合には、信号処理部21は、開口合成された信号をフーリエ変換等により周波数ドメインに変換し、この変換後の周波数ドメインの信号に対して測角アルゴリズムを適用する。この場合においても、図4のシーン設定における各被探知目標の距離及び角度が正確に推定されている。なお、先程も注記したが、データクリッパ19によって包絡線の位相を揃えたデータを切り出した後ならば、周波数ドメインで位相補正を実施しても良い。
【0075】
従って、実施例1のレーダ装置1によれば、被探知目標が同一距離に複数存在し、かつ、各被探知目標が小さな速度差で運動している場合であっても、正確に被探知目標の角度及び距離を推定することができる。
【実施例2】
【0076】
以下、実施例2におけるレーダ装置について説明する。
【0077】
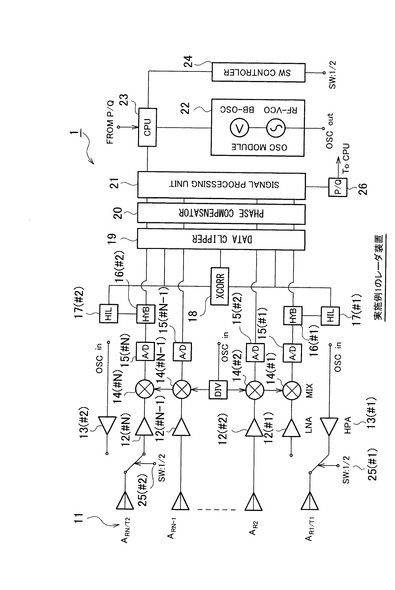
図16は、実施例2におけるレーダ装置1の構成を示すブロック図である。以下、実施例2のレーダ装置1における、実施例1と異なる各処理部についてそれぞれ説明する。実施例2におけるレーダ装置1は、基準組み合わせの一方の組み合わせ(送信アンテナAT1と受信アンテナARNとの組み合わせ)における受信アンテナARNに対応する処理系統にのみHYB16及び包絡線検波部17を有する。また、実施例2におけるレーダ装置1は、実施例1のデータクリッパ19に替え、包絡線周波数推定部(以降、EF推定部と表記する)31を有する。また、実施例2におけるレーダ装置1は、送信アンテナAT2に対応する処理系に遅延素子32を新たに有する。なお、他の処理部については実施例1と同様である。
【0078】
EF推定部31は、包絡線検波部17から包絡線信号を受け、この包絡線信号の周波数(通常、包絡線は幾つかの周波数を持つ信号成分から合成されているので、それらを合成した包絡線の周波数)を推定する。この周波数推定は、例えば、後述する式(3.3)を用いて算出される。更に、EF推定部31は、推定された周波数情報に応じて遅延量を算出する。この遅延量の算出は、例えば、後述する式(3.4)を用いて算出される。
【0079】
また、EF推定部31は、包絡線を構成する個々の信号成分の周波数の情報を取得する
ようにしてもよい。この場合、EF推定部31は、この周波数が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにして
もよい。
【0080】
遅延素子32は、EF推定部31により算出された遅延量分、発振モジュール22から送られたシステムリファレンス信号を遅延させる。これにより、送信アンテナAT2からのプローブ信号の放射時間が当該遅延量だけ遅らせられる。この遅延素子32に替え、スイッチ機構により当該遅延量に対応する時間、送信を停止させるようにしてもよい(例えば、CPUを経由して、スイッチコントローラ24にスイッチ25(#2)への制御信号を送る様に実装しても良い)。
【0081】
[実施例2における作用及び効果]
以下、実施例2におけるレーダ装置1の作用及び効果について説明する。
【0082】
ここで、説明を簡単にするために、上記式(2.2a)及び(2.2b)の総和項をMが2以上であるという条件の下で一般化すると、以下の式(3.2)で示すことができる。この一般化においては、煩雑さを避けるため、空間位相項を省略した。
【0083】
【数15】
この式(3.2)から、開口合成を成功させる為には、送信アンテナAT1から放射されたプローブ信号に対応して、基準受信アンテナARNで受信された信号の包絡線を構成する信号成分の周波数ωC(μm−μl)/2をそれぞれ予測し、これらの周波数成分から合成
された包絡線の位相が等しくなる時間分だけ送信アンテナAT2からのプローブ信号の放射を遅らせればよい事が分かる。例えば、M=2の場合においては、上記式(3.2)から、包絡線を構成する信号成分1つであり、その周波数ωenvは以下の式(3.3)で示す
ことができる。
【0084】
【数16】
そこで、送信アンテナAT2からプローブ信号を放射するタイミングを、遅延素子32によってΔT時間遅らせれば、式(3.4)に示すように、送信アンテナAT1から放射されたプローブ信号に対応して基準受信アンテナARNで受信されたエコー信号の包絡線の位相と、送信アンテナAT2から放射されたプローブ信号に対応して基準受信アンテナAR1で受信されたエコー信号の包絡線の位相とが2πの整数倍ずれて一致する。従って、各測定時間に於いて、各受信アンテナでは包絡線の一致した信号が受信される事に成る。なお、式(3.4)におけるkは自然数、aは実数を示す。また、v1及びv2はそれぞれ被探知目
標T1及びT2の速度を示す。
【0085】
【数17】
このようにして、実施例2によれば、送信アンテナAT1から放射されるプローブ信号に対応して基準受信アンテナARNで受信されたエコー信号の包絡線の周波数情報から算出される遅延量により、他の送信アンテナAT2からのプローブ信号の放射時間をΔTだけ遅延させることにより、各測定時間([0、Tf]及びΔT+[0、Tf])において開口合成が成立するデータの位相を揃えることができる(なお、図16に開示した装置で本実施例を適用する際の制限事項は、ΔT≧Tfであるが、コード分割多重等、直交性を特徴とす
る変調方式をプローブ信号の変調に採用した場合、この限りではない)。
【0086】
図17は、実施例2における包絡線成分の位相補正の結果を示すグラフである。図17では、被探知目標の諸元(距離、角度、速度)をT1(40m、0deg、10km/h
)及びT2(40m、3deg、12.0km/h)に設定し、SNRを30(dB)に
設定したシーンを利用した。図17によれば、両送信アンテナから放射されたプローブ信号に対応して各基準受信アンテナで受信された信号に対応する各復調信号の包絡線成分の位相が揃っていることがわかる。
【0087】
図18は、実施例2のレーダ装置において周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。この場合には、信号処理部21は、開口合成された信号をフーリエ変換等により周波数ドメインに変換し、この変換後の周波数ドメインの信号に対して測角アルゴリズムを適用する(或いは、各送信アンテナの動作を通して、各受信信号の包絡線の位相補正は済んでいるので、例えば位相補正部20の中で各測定時間に得られた受信信号をフーリエ変換し、周波数ドメインに変換された信号に対して残留位相補正から開口合成まで施し、信号処理部21では測角アルゴリズム等の処理のみを行う様に実装しても良い)。この場合においても、上述のようなシーン設定における各被探知目標の距離及び角度が正確に推定されている。
【0088】
従って、実施例2のレーダ装置1によれば、実施例1と同様の効果を得ることができる。
【0089】
なお、本具体的実施例として開示した装置では、開口合成後の実効アンテナ数は2×N−1である。このような数の受信アンテナで構成されるアレーで検出可能なコヒーレント信号数は、測角アルゴリズムとしてFBSS−MUSICを考えた場合、ガウス記号、G[]用いてG[2×(2×N−1)/3]である。これにより、EF推定部31は、被探知目標数Mが2より大きい場合には、式(3.5)を最小化する値として、包絡線検波部17で得られた包絡線を構成する信号成分の周波数を推定する。式(3.5)において、当該包絡線成分を構成する信号成分の周波数は、例えば、ωenv=[ω1env、・・・、ωLenv]Tと定義される。そして、複数の正弦波の和としてモデル化した包絡線の周波数に対し、上記式(3.4)が成り立つ遅延量ΔTを求めるようにすれば良い。なお、式(3.5)におけるHIL[vTX1RX,N(t)]とは送信アンテナAT1から放射されたプローブ
信号に対応して基準受信アンテナARNで受信されたエコー信号に包絡線検波を施すことを意味する。
【0090】
【数18】
[変形例]
上述の実施例1及び2では、説明を簡単にするために、送信のために利用する共用アンテナを2つ(共用アンテナAR1/T1及びARN/T2)備える例を示したが、本実施形態はこのような形態に限定するものではない。当該共用アンテナは任意の数に設定することができ
る。例えば、M(M>2)個の送信アンテナが設けられている場合には、実施例2におけるレーダ装置1は、次のように動作するようにすればよい。レーダ装置1は、M個の送信アンテナのうち、少なくともどれか1つの送信アンテナATmから規定の時間QTfだけプ
ローブ信号を放射し、ATmに対応する基準受信アンテナARnから得られるエコー信号に包絡線検波を施し、包絡線の周波数ωenvを推定する。次に、レーダ装置1は、例えば、残
りの(M−1)個の送信アンテナから遅延量ΔT=2πkl/ωenv(kl∈Z、l≠m)
分遅延させてプローブ信号を放射するようにすればよい。
【0091】
また、1つのアンテナ素子を送信及び受信のために共用する態様ではなく、図19の例のように、別々のアンテナとして空間的に別の位置に配置するようにしてもよい。図19は、実施例1のレーダ装置の変形例を示す図である。変形例におけるレーダ装置1は、受信のためにのみ利用される受信アンテナAR1からARNと、送信のためにのみ利用される送信アンテナAT1及びAT2と、を含むアレイアンテナ11を持つ。この変形例では、各受信アンテナの間隔をdに設定した場合、各送信アンテナの間隔は(N−1)×dに設定する。これにより、例えば、送信アンテナAT1と受信アンテナAR1との組み合わせと、送信アンテナAT2と受信アンテナARNとの組み合わせが基準組み合わせとなる。なお、図19には、実施例1の変形例を示したが、このような構成は、実施例2に適用してもよい。図20は、この変形例におけるタイミングチャートである。
【0092】
また、本実施形態は、アンテナ(センサ)間隔が等間隔であることを限定するものでもない。また、包絡線の周波数がフーリエ変換を用いて検知できる程十分高い場合には、実施例1及び2におけるレーダ装置1の構成を図7に示すような構成に切り替えるようにしてもよい(例えば、実施例1の装置では、相互相関計算部18から概ね同じ大きさを持つピークが何カ所もの遅延量に対して得られる事で判定できる。但し、これらの複数のピークの中から最小の遅延量を必要な遅延量として採用すれば、態々、周波数ドメインに切り替えて位相補正を行う構成を組み込む事も無い)。また、包絡線周波数が所定の閾値よりも低い場合、即ち、相互相関が殆ど一定となる場合には、最小二乗法等で一次近似式を求め、線形トレンドとして包絡線成分の位相合わせを行うようにしてもよい(この様な場合は、復調信号がFMCWレーダ本来の定包絡線となっているので、上述の注記同様な操作を行っても良い事は言うまでも無い)。
【0093】
また、空間位相とドップラー成分による位相とが等しくなるような場合には、サンプリング周波数を変更する、不等間隔サンプリングを行う、被探知目標が正常に検出されていた時点に得られた目標諸元の値からカルマンフィルタ等の手段で予測される値を用いる、測定時間を所定時間ずらす、或いは、開口合成を行わないで測角を行う等、動作モードを切り替えるようにしてもよい。
【0094】
また、距離遅延によって定まる周波数ωBは、先に述べた様に比較的大きな値を取るの
で、これをフィルタバンク等によって先に検出し、vTX1/2RX、n(t)にexp(−jωBt)を掛けて下記式(4.1)の成分を復調すれば、式(4.1)は式(1.17)と
同じ形の式に書き直すことができる。言い替えれば、エコー信号がドップラー成分のみから構成されるかのように復調信号を扱うことで角度推定処理が可能となる。なお、vTX1/2RX、n(t)にexp(−jωBt)を掛けることに替え、全てのvTX1/2RX、n(t)に
包絡線検波を施すようにしてもよい。
【0095】
【数19】
但し、各信号に包絡線検波を施して得られる信号とは、|HIL(vTX1/2RX、n(t))|であるから、角度スペクトラムがピークを示す目標の角度は実際の値と符号が反転する。言い換えれば、各信号に包絡線検波を施して得られる信号は、100%変調に近いため、信号の絶対値に対して角度推定を行うこと、或いは、時間ダイバーシティによって開口合成を実現していることになる。なお、直交復調器でI/Qチャネルに分かれたベースバンド信号が得られる場合には、別途、包絡線検波部を用意する必要はなく、Iチャンネルの2乗とQチャンネルの2乗との和の平方根を取ることにより各包絡線成分を検出するようにすればよい。
【0096】
また、基準組み合わせを構成する受信アンテナを含め、全ての受信アンテナによる受信信号に包絡線検波を施し、開口合成後に得られる各受信アンテナの包絡線信号そのものに対して測角アルゴリズムを適用するようにしてもよい(これは上述した如く、エコー信号がドップラー成分のみから構成されるかのように復調信号を扱う手法と概ね等価であるから、測角結果の符号が反転しない様にするには、モノポーラ化している包絡線信号を最小位相等の大きさを参照してバイポーラ信号に変換する事が望ましい)。
【0097】
また、所定の速度分解能以下の速度差を持つ複数目標が存在する場合には、以下のように処理するようにしてもよい。即ち、受信アンテナ毎に受信信号を分岐して、一方は、速度分解能以上の周波数を遮断する第1のローパスフィルタ(LPF)を通し、もう一方は当該第1のLPFの遮断周波数以上の周波数を通過させる第2のLPF又はバンドパスフィルタ(BPF)を通す。第1LPF又は第2LPFを通過させた信号に自乗検波等を施すことにより開口合成の要否を判定し、この判定結果に応じて開口合成を実行するか否かを切り替えるようにしてもよい。
【0098】
[補足]
諸元(Tf=1/250(sec)、Δω=50(MHz))を持つレーダ装置で得ら
れたデータに512点のフーリエ変換を施した場合の周波数分解能、距離分解能は以下のとおりである(但し、ω+、ω-とはゼロ以上の最小の絶対値を持つ正、負側周波数である)。
【0099】
最小周波数(ゼロを除く):(ω+−ω-)/2π=250×2=500(Hz)
最大周波数:500×512/2=128(kHz)
最小距離:TfC0(ω+−ω-)/16Δω=0.75(m) (C0は光速度)
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0100】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウ
ェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0101】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【符号の説明】
【0102】
1 レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(HPA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16 分岐器(HYB)
17 包絡線検波部(HIL)
18 相互相関計算部(XCORR)
19 データクリッパ
20 位相補正部
21 信号処理部
22 発振モジュール
23 CPU(Central Processing Unit)
24 スイッチコントローラ
25 スイッチ
31 包絡線周波数推定部(EF推定部)
32 遅延素子
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置、例えば、車載用レーダ(以降、探知測距装置の具体例としてレーダ装置を取り上げる)等には、複数の送信用センサ素子から構成される送信用センサアレイと、複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせ、実効的に受信用のセンサアレイの開口を拡大する技術を採用する事で、性能を犠牲にせずに小型化を実現した装置がある。このような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成等と呼ばれる。開口合成を用いたレーダ装置は、複数の送信センサ素子から(時分割多重、周波数分割多重、或いは、符号分割多重の何れかの方式、又は、その組み合わせで)プローブ信号を放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、各受信センサ素子で受信された信号を合成することにより実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−155171号公報
【特許文献2】特開2006−98181号公報
【特許文献3】特開2007−155381号公報
【特許文献4】特開平11−231040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の開口合成レーダでは、或る特定の条件下においては、被探知目標を正確に探知できないという問題があった。この様な条件としては、例えば、複数の物体がレーダから殆ど同じ視線方向相対距離(以下、単に距離と記す)に存在し、それぞれが殆ど同じ視線方向相対速度(以下、単に速度と記す)で運動している様なケースがある。この様なケースを具体的に考えるならば、渋滞状況等(複数の物体が、近接した位置を小さな速度差で動いている)、日常的に頻発するシーンでも正確に目標を探知できなくなる可能性がある。車載用レーダとしての開口合成レーダはこのような問題点を抱えている。
【0005】
本発明の一態様に係る課題は、このような問題点に鑑み、被探知目標を正確に探知する開口合成技術を実現することにある。
【課題を解決するための手段】
【0006】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0007】
第1の態様は、送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から構成されるアレイアンテナを含み、各受信アンテナから得られる信号を開口合成することにより被探知目標を探知するレーダ装置に関する。この第1の態様に係るレーダ装置は、当該アレイアンテナのうち空間位相が等しくなる送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナ
から得られる信号の包絡線成分を取得する包絡線検波部と、この包絡線検波部により取得された包絡線成分に基づいて上記組み合わせ間の補正量を決定する決定部と、この決定部で決定された補正量を用いて、上記各受信アンテナから得られる信号の位相を開口合成処理の前に補正するか、又は、他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、を備える。
【0008】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0009】
上記各態様によれば、被探知目標を正確に探知する開口合成技術を提供することができる。
【図面の簡単な説明】
【0010】
【図1】実施例1のレーダ装置の構成を示すブロック図。
【図2】送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャート。
【図3】開口合成の成立条件を示す概念図。以下、AR1/T1、ARN/T2を送受共用素子として動作させるタイムスロット(図2のタイミングチャートに従った場合、観測時間:[0、Tf]、[Tf、3Tf])を、それぞれFM1、FM2、或いは、測定時間A、Bと記す。
【図4】包絡線検波部への入力信号と包絡線検波部から出力される包絡線信号とを示す図。
【図5】図4に示す各包絡線信号間の相互相関値を示すグラフ。
【図6】包絡線成分の位相補正の結果を示すグラフ。
【図7】実施例1とは異なるレーダ装置の構成を示すブロック図。
【図8】図7のレーダ装置で利用されるタイミングチャート。
【図9】シーン設定例を示す図。
【図10】図7のレーダ装置を用いて測角を実施した結果を示すグラフ。
【図11】図10で利用した周波数ドメインの信号を時間ドメイン信号に変換し、測角を実施した結果を示すグラフ。
【図12】図11の時間ドメインの信号に対し、時間ドメインで位相差をキャンセルした場合の測角結果を示すグラフ。
【図13】基準受信アンテナにおける復調信号とこの復調信号に包絡線検波を施して得られた包絡線信号(包絡線成分)とを併記したグラフ。
【図14】実施例1のレーダ装置を用いて時間ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
【図15】実施例1のレーダ装置を用いて周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
【図16】実施例2におけるレーダ装置1の構成を示すブロック図。
【図17】実施例2における包絡線成分の位相補正の結果を示すグラフ。
【図18】実施例2のレーダ装置を用いて周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフ。
【図19】実施例1のレーダ装置の変形例を示す図。
【図20】変形例におけるタイミングチャート。
【発明を実施するための形態】
【0011】
以下、一実施形態として、プローブ信号にFMCW(Frequency Modulated Continuous
Wave)を採用したレーダ装置(以降、単にレーダ装置と表記する)について具体例を挙
げ説明を行う。実施形態としてのレーダ装置は、例えば、車両等に搭載される。しかしながら、本実施形態におけるレーダ装置は、それを搭載する装置、システムを限定するものではない。以下に挙げた各実施例はそれぞれ例示であり、本開示は以下の各実施例の構成に限定されない。
【実施例1】
【0012】
以下、実施形態としてのレーダ装置の第1実施例について説明する。
【0013】
[装置構成]
図1は、実施例1のレーダ装置の構成を示すブロック図である。実施例1におけるレーダ装置1は、図1に示すように、アレイアンテナ11、低雑音増幅器(以降、LNAと表記する)12、電力増幅器(以降、HPAと表記する)13、ミキサ(図1に示すMIX)14、アナログデジタル(以降、A/Dと表記する)変換器15(一時的にデジタルデ
ータを格納するメモリを実装する様に構成しても良い)、分岐器(以降、HYBと表記する)16、包絡線検波部(図1に示すHIL)17、相互相関計算部(図1に示すXCORR)18、データクリッパ19、位相補正部20、信号処理部21、発振モジュール22、CPU(Central Processing Unit)23、スイッチコントローラ24、スイッチ2
5、送信サイクル設定器(図1に示すP/Q)26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0014】
発振モジュール22は、DDS(Direct Digital Synthesizer)等、デジタル的に直接FMCW信号を生成可能なものでも良いが、具体例では一般的なアナログ式の回路構成、即ち、ベースバンド発振器(図1に示すBB−OSC)と高周波電圧制御発振器(図1に示すRF−VCO、勿論、電流制御型でも良い)とを組み合わせたもので考えておく。発振モジュール22では、ベースバンド発振器から出力される基準信号が高周波電圧制御発振器へ送られ、高周波電圧制御発振器によりその基準信号を用いて周波数変調されたシステムリファレンス信号が出力される。この基準信号には例えば三角波が利用される。
【0015】
HPA13は、送信アンテナに対応する処理系統に設けられる。図1の例によれば、送信アンテナとして利用されるアンテナはAT1及びAT2の2つであるため、HPA13は2つ(HPA13(#1)及びHPA13(#2))設けられている。HPA13は、発振モジュール22から出力されたシステムリファレンス信号を増幅し、送信アンテナとして選択されている側のアンテナから目標探知用のプローブ信号として出力される。
【0016】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。実施例1では、直線状に配列された各アンテナ素子のうちの両端の2つのアンテナ素子は、送信用及び受信用として共用され、それ以外のアンテナ素子は受信用のみとして利用される。以降、送信及び受信で共用されるアンテナ素子を共用アンテナAR1/T1又
は共用アンテナARN/T2と表記する。
【0017】
本発明を説明する際の具体例としては、概念の把握が簡単であるから、共用アンテナは、スイッチ25により時分割で送信用又は受信用に切り替えられる構成を採用する。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように実施例1におけるレーダ装置では、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0018】
スイッチ25は、スイッチコントローラ24からの制御信号に応じて、共用アンテナを送信用として利用するか、受信用として利用するかを切り替える。具体的には、スイッチ25(#1)は、共用アンテナAR1/T1をHPA13(#1)に接続するか、LNA12
(#1)に接続するかを切り替える。共用アンテナAR1/T1はHPA13(#1)に接続
されると送信アンテナAT1として動作し、LNA12(#1)に接続されると受信アンテナAR1として動作する。同様に、スイッチ25(#2)は、共用アンテナARN/T2をHP
A13(#2)に接続するか、LNA12(#N)に接続するかを切り替える。共用アンテナARN/T2はHPA13(#2)に接続されると送信アンテナAT2として動作し、LN
A12(#N)に接続されると受信アンテナARNとして動作する。
【0019】
スイッチコントローラ24は、CPU23から送られて来る送信サイクル情報、及び発振モジュール22のベースバンド発振器から出力される基準信号の周期Tfに応じて、ス
イッチ25の切り替えタイミングを制御する。
【0020】
送信サイクル設定器26は、信号処理部21からの要求により基準信号の周期Tf又は
送信サイクル情報(P/Q)の変更指示をCPU23へ送る。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として(但し、個々の共用アンテナを1つのタイム
スロットの中で送受用途に切り替える際のデューティー比は無視)、送信アンテナAT1を利用するタイムスロットの比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。
【0021】
スイッチコントローラ24は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。続いて、スイッチコントローラ24は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用ア
ンテナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNと
して利用する。
【0022】
図2は、送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャートである。図2の例によれば、[0、Tf]の間、送信アンテナAT1は
所定の周期でプローブ信号を放射し、受信アンテナARNは継続的にエコー信号を受信する。[Tf、3Tf]の間には、送信アンテナAT2は所定の周期でプローブ信号を放射し、受信アンテナAR1は継続的にエコー信号を受信する。このタイミングチャートを参照し、測定開始時刻を0として、本実施形態に基づく「装置としての動作の1周期」を示すと、タイムスロット[0、PTf]ではAR1/T1を共用アンテナ、AR2〜ARNを受信アンテナとして動作させ、タイムスロット[PTf、(P+Q)Tf]ではARN/T2を共用アンテナ、AR1〜ARN-1を受信アンテナとして動作させる。
【0023】
LNA12は、受信アンテナに対応する処理系統に設けられる。図1の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ25(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ25(#2)の切り替えにより受信アンテナARNに接続される。LNA12は、接続される受信アンテナから受信信号を受け、この受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0024】
ミキサ14は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール22から送られるシステムリファレンス信号と混合させることにより、高周波エコー信号をベースバンド信号に変換する。
【0025】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリン
グ周波数でデジタルベースバンド信号に変換する。以降、このデジタルベースバンド信号を単に復調信号と表記する。
【0026】
HYB16は、受信アンテナAR1及びARNで受信された信号の復調信号を処理するために、受信アンテナAR1及びARNに対応する各処理系統にそれぞれ設けられる。具体的には、HYB16(#1)はA/D変換器15(#1)に接続され、HYB16(#2)はA/D変換器15(#N)に接続される。言い換えれば、HYB16は、アレイアンテナ11に於いて空間位相が等しくなる送信アンテナ及び受信アンテナの組み合わせにおける受信アンテナで受信された信号を処理する処理系統に設けられる(従って、HYBとHILとを実装する箇所をアレイアンテナの最外縁の受信アンテナに限定する必要はない)。開口合成操作は、このように等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせで受信された信号を基準として実行される。以降、このように開口合成の基準として採用される送信アンテナ及び受信アンテナの組み合わせを基準組み合わせと表記し、基準組み合わせにおける送信アンテナ及び受信アンテナを基準送信アンテナ及び基準受信アンテナと表記する。なお、実施例1では、基準送信アンテナAT1と基準受信アンテナARNの組み合わせと基準送信アンテナAT2と基準受信アンテナAR1との組み合わせが基準組み合わせとなる(具体的な他の基準組み合わせとしては、基準送信アンテナAT1と基準受信アンテナAR1の組み合わせと基準送信アンテナAT2と基準受信アンテナARNとの組み合わせ等が考えられる。この場合、基準とする位相長はゼロになる)。
【0027】
図3は、図2のタイミングチャートに沿って装置を動作させた場合を例に採って、開口合成が成立する条件を示した概念図である。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間Aとも
表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、3Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している。この図から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0028】
HYB16は、A/D変換器15から出力される復調信号を包絡線検波部17方向とデータクリッパ19方向とに分岐する。
【0029】
包絡線検波部17は、基準受信アンテナで受信された信号の復調信号を処理するために各HYB16にそれぞれ接続される。包絡線検波部17は、HYB16で分岐された信号の包絡線成分を検出する。以降、包絡線検波部17で取得した包絡線成分を包絡線信号と表記する場合もある。包絡線検波部17は、例えば、信号処理部21で行われるフーリエ変換(FFT(Fast Fourier Transformation)等)の最小周波数分解能より長い周期を
持つ信号成分の存在を検出した場合、取得された包絡線信号を相互相関計算部18に送る。なお、包絡線検波部17は、当該フーリエ変換の最小周波数分解能より長い周期を持つ包絡線成分の存在を検出した場合、上述の送信サイクル情報(P及びQ)でのプローブ信号放射をCPU23に要求するように送信サイクル設定器26へ依頼するようにしてもよい(P、Q、及び、Tfの値を変更する事も含む)。なお、包絡線検波部17は、例えば
、ダイオード検波器、直交復調器、ヒルベルト変換器、ウェーブレット変換器、フィルタバンク等を利用して実現される。
【0030】
図4は、包絡線検波部への入力信号と包絡線検波部から出力される包絡線信号とを示す図である。図4は、図2のタイミングチャートを用いた場合であって、被探知目標を2つに設定し、各被探知目標の諸元(距離、角度、速度)をT1(40メートル(m)、0度
(deg)、10キロメートル毎時(km/h))、T2(40(m)、3(deg)、
12.5(km/h))に設定し、SNR(Signal-to-Noise Ratio)を30デシベル(
dB)に設定した場合を示す。
【0031】
図4では、上段に示されるグラフ(A−I)及び(B−I)が包絡線検波部17へ入力される信号をそれぞれ示し、下段に示されるグラフ(A−O)及び(B−O)が包絡線検波部17から出力される包絡線信号をそれぞれ示す。このうち、グラフ(A−I)及び(A−O)は図2の例の[0、Tf]間に得られる復調信号とそれに対して施される信号処
理の結果を示し、グラフ(B−I)及び(B−O)は図2の例の[Tf、3Tf]間に得られる復調信号とそれに対して施される信号処理の結果を示す。
【0032】
相互相関計算部18は、基準送信アンテナAT1に対応する基準受信アンテナARNで受信された信号に関する包絡線信号と、基準送信アンテナAT2に対応する基準受信アンテナAR1で受信された信号に関する包絡線信号と、の相互相関を取る。この相互相関を取るにあたり、相互相関計算部18は、測定時間[0、Tf]に処理された包絡線信号をメモリ(
図示せず)に保持し、次の測定時間[Tf、3Tf]に処理された包絡線信号の位相が先の包絡線信号の位相と一致するタイミングを遅延量(タイムラグ)として検出する。なお、相互相関計算部18は、相互相関を取るにあたり、両包絡線信号の長さを合わせるために、信号長が短い、測定時間[0、Tf]に取得された包絡線信号の無信号区間をゼロパデ
ィングする。各包絡線信号の占める時間長は、CPUから送られる送信サイクル情報(図1に示すP/Q)により決まる値である。なお、今後特に断らないが、時間軸を持つグラフに於ける「時間」とは、測定時間そのものを表しているのではなく、データとしてのインデックスを表しており、従って、実際の測定時間の相違と無関係に、ゼロからカウントが開始している。
【0033】
図5は、図4に示す各包絡線信号間の相互相関値を示すグラフである。図5の例では、240付近の遅延インデックスにおいて、相関値が最大となっているため、相互相関計算部18は遅延量を240と決定する。このことは、図4においても示されている。具体的には、図4のグラフ(B−O)に於いて時間インデックスが240以降の波形と、同図のグラフ(A−O)の有信号部の波形とは位相が一致している。
【0034】
相互相関計算部18は、このように基準組み合わせの復調信号の包絡線成分間の遅延量を検出すると、この遅延量をデータクリッパ19へ送る。相互相関計算部18は、相互相関において明確なピークが得られない場合、即ち、相互相関のピーク値が所定閾値より低い場合、或いは、同じ程度の大きさのピークが何カ所も出現する様な場合、基準信号の周期Tf又は送信サイクル情報(P/Q)の変更指示をするように送信サイクル設定器26
へ要求する様にしても良い。
【0035】
データクリッパ19は、各タイムスロットに於いて各受信アンテナで受信された信号の復調信号を各A/D変換器15からそれぞれ受け、それぞれメモリに保持する(即ち、このメモリは上述した「装置としての動作の1周期」に得られるA/D変換器15からの出力をタイムスロット毎及び受信系(アンテナ〜A/D変換器)毎にアクセス可能な形で保存しておく事ができ、更に、後述の各操作に於いては所望のタイムスロットに於ける所望の受信系からのデータが、適切に出力する事ができるものとする)。
データクリッパ19は、相互相関計算部18から送られた遅延量に基づいて、入力された各復調信号の包絡線成分の位相を合わせる。具体的には、データクリッパ19は、[Tf
、3Tf]間の各復調信号から当該遅延量以降のTf時間分の信号をそれぞれ切り出す。これにより、[0、Tf]間の各復調信号と包絡線の位相が一致するデータを、[Tf、3Tf]間の各復調信号から取得する事ができる(即ち、異なるタイムスロットに於いて取得
したデータ列から、包絡線の位相が一致したデータ列を得られる)。データクリッパ19
は、このように位相補正された各復調信号を位相補正部20へ送る。
【0036】
図6は、包絡線成分の位相補正の結果を示すグラフである。図4と比較すれば明白なように、データクリッパ19により切り出された各(基準受信アンテナ由来の)信号の包絡線は(図6の(B−O))、[0、Tf]間の復調信号の包絡線(図6の(A−O))と
位相が揃えられている。
【0037】
位相補正部20は、データクリッパ19から送られて来る包絡線成分の位相が揃った各復調信号を受け(なお、ここで用いた具体例に於いて、データクリッパから送られてくるデータの長さは、タイムスロット[0、Tf]のそれと同じである)、これら各復調信号
の残留位相誤差を補正する。具体的には、各回路素子の特性バラツキ等も含めてベースバンド信号に含まれる残留位相誤差の影響をキャンセルするために、後述する式(2.4)を用いて(時間ドメインに於ける)補正量を算出し、この補正量に応じて、データクリッパで包絡線の位相が合う様に切り取られた測定時間[Tf、3Tf]における各復調信号の位相誤差を他の測定時間[0、Tf]での各復調信号の位相誤差にあわせるように補正す
る(但し、包絡線の位相を揃えたデータであれば、時間ドメインのデータにFFTを掛けて周波数ドメインのデータに変換し、式(1.13)式で補正量を算出し、周波数ドメインに於いて上述の様な補正処理を実施しても良い)。このように残留位相誤差の補正が行われた各信号は、信号処理部21へ送られる。
【0038】
信号処理部21は、位相補正部20から送られる各信号を開口合成し、開口合成された信号にDBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、PRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法等のような既知の角度推定アルゴリズム(以降、端に測角アルゴリズムと表記する)を適用する。なお、時間ドメインで開口合成された信号をフーリエ変換(FFT(Fast Fourier Transformation))等により周波数ドメインの信号に変換し、この周波数ド
メインの信号に対して測角アルゴリズムを適用するようにしてもよい。開口合成手法及び測角アルゴリズムは周知の技術を用いればよいため、ここでは説明を省略する。なお、信号処理部21は、測角アルゴリズムにおいて、自己相関成分を含まない相関行列を用いるようにしてもよい。
【0039】
また、信号処理部21は、包絡線検波部17から包絡線そのものの周波数、乃至、この包絡線を構成する信号成分の個々の周波数の情報を取得し、所定の方法により包絡線成分(或いは、上記の各量)を取得するようにしてもよい。この場合、信号処理部21は、この周波数成分(或いは、上記の各量)が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにしてもよい。
【0040】
[実施例1における作用及び効果]
以下、上述の実施例1におけるレーダ装置1の作用及び効果について説明する。
【0041】
まず、実施例1における作用及び効果を説明する前に、実施例1とは異なるレーダ装置の動作及びその問題点を数式に基づいて検証する。以下の説明は、図7に示す構成、及び、図8に示すタイミングチャートを利用する例を用いる。図7は、実施例1とは異なるレーダ装置の構成を示すブロック図である。図8は、図7のレーダ装置で利用されるタイミングチャートを示す。なお、以下のような数式による検証は、ここで新たに開示されるものである。また、基準信号の周期は、上記実施例1と同様にTfと表記する。
【0042】
図8の送信サイクル情報によれば、測定時間[0、Tf]では、共用アンテナAR1/T1が送信アンテナ又は受信アンテナとして利用され、受信アンテナAR2からARN-1及び共用アンテナARN/T2が受信アンテナとして利用される。また、測定時間[Tf、2Tf]では、
共用アンテナARN/T2が送信アンテナ又は受信アンテナとして利用され、受信アンテナAR2からARN-1及び共用アンテナAR1/T1が受信アンテナとして利用される。
【0043】
ここで、各時間区間に於けるプローブ信号、即ち、送信アンテナAT1及びAT2から放射されるプローブ信号をvTX1(t)、vTX2(t)とおくと、各プローブ信号はそれぞれ以下の式(1.1a)及び(1.1b)のように表される。ωCは発振モジュール22を構
成するRF−VCOのキャリア角周波数を示す。また、vTX2(t)のΔφは送信時間差
による位相ずれを示す。なお、以降の説明では、角周波数と周波数とを区別しない。
【0044】
【数1】
上記式(1.1a)及び(1.1b)におけるh(t)は、発振モジュール22を構成するBB−OSCからの基準信号f(x)に対して上記式(1.2)で定義される。説明の便宜のため、BB−OSCのから出力される信号の時間の原点を半周期ずらすと、f(x)は以下の式(1.3)で表される。Δωは片側変調帯域幅である。
【0045】
【数2】
ここで、M個の被探知目標がレーダ装置1に対して視線方向相対距離rm(m)、角度
θm(deg)(時不変)なる位置を視線方向相対速度vm(km/h)で運動し続けるものと仮定する。これにより、各受信アンテナで受信されたエコー信号vTX1RX,n(t)、
vTX2RX,n(t)は、式(1.5)、(1.6a)、(1.6b)の定義を用いて、以下
の式(1.4a)及び(1.4b)で表せる(n=1〜N、m=1〜M)。受信信号vTX1RX,n(t)は、測定時間[0、Tf]に於いて、送信アンテナAT1から放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。受信信号vTX2RX,n(t)は、測定時間[Tf、2Tf]に於いて、送信アンテナAT2から放射されたプロ
ーブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。なお、nTX1n(t)及びnTX2n(t)は加法性ガウス雑音である。
【0046】
【数3】
各受信信号は、ミキサ14でシステムリファレンス信号(発振モジュール22の出力信号)とミキシングされることによりベースバンド信号に変換される。このベースバンド信号は、A/D変換器15によりサンプリング周波数ωS(例えば、ωS=Kωf、ωf=2π/Tf、Kはサンプル数)でデジタル信号に変換される。続いて、信号処理部21がこれ
らデジタルベースバンド信号(以降、復調信号と表記する)に以下のような信号処理を施すことにより、被探知目標の角度及び距離を推定する。
【0047】
ここで、各受信アンテナでの受信信号から得られる各復調信号vTX1RX,n(t)、vTX2RX,n(t)は、復調等に伴う位相誤差を各プローブ信号に起因する量として捉え、まとめてΔψTX1(t)及びΔψTX2(t)で示すと、以下の式(1.7a)及び(1.7b)のように示される。なお、以降の各信号の表記における時間変数tは、δt=Tf/Kで離
散化された時間を動くものとする。例えば、[0、Tf]時間では、時間変数tは[0、
δt、2δt、・・・、(K−1)δt]を動く。
【0048】
【数4】
実際に市場に存在するレーダ装置の諸元に基づいて、上記式(1.7a)及び(1.7b)から誤差と空間位相を除いた状態で、FMのダウンチャープによる位相項を取り出して整理すると、以下の式(1.8)のようになる。なお、参考とした装置諸元は、探知距離範囲(最小探知距離及び最大探知距離)が1〜200(m)、探知速度範囲が1(km/h)〜200(km/h)、Δωが約50メガヘルツ(MHz)、基準信号(RF−VCOへの変調入力信号)の周期Tfが1ミリ秒(msec)である。
【0049】
【数5】
式(1.8)を参照し、距離遅延による周波数成分(FMのアップチャープでは符号が異なる)である−4Δωτm0/TfをωBmと置き、定数項ωCτm0+Δωτm0をΔψTX1(
t)及びΔψTX2(t)に含める事で、式(1.7a)及び式(1.7b)は、以下の式
(1.9a)及び(1.9b)の様に書き換えることができる。
【0050】
【数6】
このような2つの測定時間帯[0、Tf]及び[Tf、2Tf]で取得された各復調信号
vTX1RX,n(t)及びvTX2RX,n(t)に対して開口合成が成立する条件は、基準組み合わせにおける各復調信号vTX1RX,N(t)、vTX2RX,1(t)の位相長が双方の測定時間で一致することである。よって、開口合成を成立させるには、上記式(1.9a)及び(1.9b)で示される位相誤差ΔψTX1(t)及びΔψTX2(t)の扱いが問題となる。
【0051】
図7のレーダ装置では信号処理部21に於いて開口合成操作を行う。先ず、各測定時間に得られた信号にフーリエ変換を施すことによって周波数ドメインのデータに変換する。これを復調信号vTX1RX,n(t)を例に採って具体的に示すと以下のようになる。周波数
インデックスがk(k=−K/2+1〜K/2)番目の要素は、以下の式(1.10)で与えられるから、m番目の目標に対応する信号成分のフーリエ変換結果は、空間位相を除いて式(1.11a)で示すことができる。但し、式(1.11a)の左辺は、例えば、下記式(1.11b)のように定義した場合には、式(1.11c)等により得られる。なお、一般性を失わずg0TX1=1とおいて良い。
【0052】
【数7】
以上の考察を踏まえると、上記式(1.9a)及び(1.9b)に示した時間ドメインの信号から変換された周波数ドメイン信号は、以下の式(1.12a)及び(1.12b)のように表わすことができる。
【0053】
【数8】
続いて、信号処理部21は、基準組み合わせに対応する各復調信号を用いて、各周波数インデックスkにおける位相誤差dψ(k)を、下記の式(1.13)を用いて取得する(ここで、基準組み合わせに対して空間位相が等しくなる事に注意)。
【0054】
最後に、信号処理部21は、位相誤差dψ(k)に基づく補正量exp[−jdψ(k)]を、全てのn及びkについてVTX2RX,n(k)と掛けることにより、VTX2RX,n(k)の位相誤差をVTX1RX,n(k)の位相誤差ΔψTX1(t)と合わせ、結果、開口合成を成立させていた。即ち、図7のレーダ装置の信号処理部21によって得られる開口合成信号は、下記式(1.14a)及び(1.14b)で示される(簡単の為、加法性雑音成分の影響は省略している)。
【0055】
【数9】
上記式(1.14a)及び(1.14b)のような各信号から被探知目標の角度を推定するためには、基準受信アンテナの各信号の空間位相が等しいことに基づいて、開口合成を実施した後の基準受信アンテナの信号を以下の式(1.15)によって定義する。更に、先に定義した基準受信アンテナの信号と、他の各受信アンテナによって受信された信号とを要素とするベクトルV(k)、雑音信号ベクトルN(k)、角度行列A、及び、目標信号ベクトルX(k)を、以下の式(1.16a)、(1.16b)、(1.16c)、及び、(1.16d)で定義することによって、開口合成された信号に対し、式(1.17)のようなアレー信号処理の基本関係式を導く(言うまでも無いが、各式は周波数インデックスがkである信号要素に関する表記である)。
【0056】
【数10】
信号処理部21は、式(1.17)のように定義される信号ベクトルをDBF、MUSIC、PRISM等の既知の測角アルゴリズムを用いて処理する。
【0057】
しかしながら、被探知目標が同一距離に複数存在し、かつ、各被探知目標が小さな速度差で運動している場合には、上述の如く数式を用いて示した、本実施例1と異なるレーダ装置の動作では正確に被探知目標を探知できないという問題点が判明した。
【0058】
図9は、シーン設定例を示す図である。以下、図9で示されるシーン設定を用いて、図7で示すレーダ装置の問題点を数式で検証する。図9のシーン設定では、2台の被探知目標T1、T2が、図7のレーダ装置Oから同距離(r1=r2=r)で角度θ1及びθ2の位置に存在し、それぞれ速度v1及びv2で運動している。
【0059】
ここで、計算例で用いたレーダ装置の諸元について記しておくと、発振モジュール22から出力されるシステムリファレンス信号は、キャリア周波数が76ギガヘルツ(GHz)(=ωC/2π)、RF−VCOへの変調入力信号(基準信号)の基本周期Tfが4(msec)、片側変調帯域が50(MHz)(=Δω/2π)のFMCW信号である。また、アンテナ素子数Nが4、アンテナ素子間隔dが1.8λ(λはキャリア信号の波長)、サンプル数Kが512であるとした。更に、図9のシーン設定における各被探知目標の諸元(距離、角度、速度)をT1:(40(m)、0(deg)、10(km/h))、T2:(40(m)、3(deg)、11(km/h))と、SNRを30(dB)と仮定した。なお、目標諸元については、計算例毎に若干変更する事がある。
【0060】
このような各諸元を用いて、図7に示す実施例1とは異なるレーダ装置において、先述の手順に従って開口合成操作を行い、周波数ドメインでの測角を行ったところ図10のような結果となった。
【0061】
図10は、図7に示す実施例1とは異なるレーダ装置における測角結果を示すグラフである。図10によれば、被探知目標の距離は概ね正確に推定できているものの、0度及び3度にそれぞれ存在する被探知目標が1.5度付近に存在する1つの被探知目標として誤推定されている。
【0062】
そこで、このような誤推定の原因を特定するために、上記の合成信号(式(1.17))に逆フーリエ変換を施すことにより当該合成信号を時間ドメインの信号に再変換した後に、この再変換された時間ドメインの信号に測角アルゴリズムを適用した。図11は、図10で利用した周波数ドメインの信号から変換された、時間ドメインの信号に対する測角結果を示すグラフである。DBF、MUSIC及びPRISMの測角結果を示すグラフ(左上グラフ、右上グラフ、左下グラフ)によれば、本来、時間的に不変であるはずの目標角度(図では空間位相φTX1/2,mn(t)の傾きと記している)が時間に応じて変化している。
【0063】
この例では、2つの被探知目標の相対速度差は1(km/h)(≒0.28(m/sec))であるから、Tf(=4(msec))時間毎にこの速度差によって生じる被探知
目標間の距離差は約1.1(mm)に過ぎず、装置の距離分解能(≒0.75(m))と比べて遥かに小さな値である。言い替えれば、2つの測定時間を通して、各被探知目標の距離は同じとみなすことができるため、距離遅延によって定まる周波数ωB1及びωB2は、同一の値ωBとなると考えて良い(式(2.1)参照。具体的には、周波数ωB1及びωB2
は40(m)で概ね13(kHz)となる)。以上より、上記式(1.9a)及び(1.9b)は以下の式(2.2a)及び(2.2b)のように書き換えることができる。
【0064】
【数11】
一方、ドップラー周波数に対応する位相及び空間位相について考えると、例えば上記式(2.2a)におけるvTX1RX,n(t)の総和項のexpの括弧内は、上記式(2.3a
)で表わすことができる。この式(2.3a)によれば、時間的に不変の空間位相(2π/λ)(n−1)dsin(θm)が、時間に従って変化するドップラー位相推移(2π
/λ)2vmtの影響を受け、各目標の速度、時間、角度の組み合わせによって、時間的
に複雑な挙動を示す事が分かる(なお、ドップラー周波数は10(km/h)で1.4(kHz)程度である)。結果、図11に示した如く、時間ドメインにおいて角度推定を行った際に観察された現象(時間的に不変であるはずの角度が時間に応じて変化する)が生じると考えられる。そして、このような現象が上述のような問題点(図10で示されるような誤推定)を招いていると考えられる。
【0065】
そこで、このような問題点を解決する手法として、先ず、時間ドメインで信号の位相差をキャンセルすることを考えた。このようにすれば、時間に応じて変化するドップラー位相推移の影響も含めて補正することができる筈である。具体的には、基準組み合わせに対する上記式(2.2)を用い、以下の式(2.4)によって補正量を算出する。そして、vTX2RX,n(t)の全てのn及びtについて、この補正量を用いたexp[−jdψ(t
)]を掛けることで、vTX2RX,n(t)の位相誤差をvTX1RX,n(t)の位相誤差と共通の位相誤差ΔψTX1(t)に合わせた後、合成開口を行う。
【0066】
【数12】
図12は、このようにして得られた信号に測角アルゴリズムを適用した結果を示すグラフである。図12によれば、時間ドメインで信号の位相差をキャンセルすることにより、予想通り角度の時間変化が打ち消されている。しかしながら、やはり、被探知目標の個数と角度は誤推定されたままである。
【0067】
そこで、若干視点を変えて、開口合成問題を完全に解決する手法を考えた。即ち、上記式(2.2a)及び(2.2b)によれば、距離遅延によって定まる周波数が13(kHz)程度であったのに対して、ドップラー周波数は1.4(kHz)と10分の1程度であるため、前記式は、キャリア周波数exp(jωBt)に総和の時間変項で振幅変調が
掛かっているものと見なせる事に注目した。即ち、上記式(2.2a)において、vTX1R
X,n(t)の総和項のみを取り出して整理すると、下記式(2.5)のように示すことが
できる。
【0068】
【数13】
この式(2.5)の最右辺は、2つの目標からの信号が合成された結果、実質上、複素成分exp()と実数成分cos()との積として表せる1つの信号として振る舞う事を意味している。即ち、複素成分は2つの被探知目標の平均ドップラー周波数と平均角度を持つ1つの被探知目標からの信号として、また、実数成分は2つの被探知目標のドップラー信号間のビート信号として解釈できるので、結局、先述の擬似的な単1目標に由来する複素信号に先述のビート信号で振幅変調(AM)が掛かった信号が上式の実体である −
これが、時間ドメインに於いて、位相補正から開口合成を行う事で、角度の時間変化は補正出来たにも拘わらず、目標の個数と角度の誤推定までは解決されなかった原因である。なお、元の被探知目標のドップラー信号間のビート信号(AM成分)は、式(2.5)(一般的には、式(1.9)や式(2.2))の包絡線として求められる事は明らかである。
【0069】
図13は、上記の結論の妥当性を検証する為、基準受信アンテナにおける復調信号とこの復調信号に包絡線検波を施して得られた包絡線信号(AM成分)とを併記したグラフである。各復調信号(式(2.2a)及び(2.2b))は上部に示され、各包絡線信号は下部に示されている。
【0070】
図13によれば、2つの測定時間[0、Tf]、[Tf、2Tf]で得られた受信信号の
位相が包絡線の影響によって大きく異なっていることが表されている。また、各包絡線信号の周波数(バイポーラ信号と見なした時)は、約73(Hz)であり、装置の最小周波数分解能である500(Hz)より遥かに小さいため、周波数ドメインで位相補正を施しても正確に開口合成ができないことも明らかである。
【0071】
そこで、実施例1におけるレーダ装置1では、上述のような開口合成を破綻させ、探知精度を劣化させる包絡線の影響を回避するために、各基準受信アンテナで受信された信号の復調信号の包絡線成分をそれぞれ検出する(包絡線検波部17)。続いて、各包絡線成分の位相の相互相関を取ることにより、各包絡線成分の位相が一致する遅延量(タイムラグ)を取得する(相互相関計算部18)。なお、相互相関計算部18による相互相関処理は、下記式(3.1)のように示される。この取得された遅延量に基づき、各受信信号から包絡線成分の位相が揃った信号部分を取得し(データクリッパ19)、更に、位相補正部20で残留位相誤差の補正を行い(包絡線の位相が揃ったデータに対しては周波数ドメインで残留位相の補正を実施しても良いので、データクリッパからの出力信号を信号処理部21に於いて周波数ドメインの信号に変換し、残留位相補正を行っても良い)、開口合成操作及び測角アルゴリズムを適用する(信号処理部21)。
【0072】
【数14】
このようにして、実施例1によれば、各基準送信アンテナAT1及びAT2から放射されたプローブ信号に対応するエコー信号を受信した各基準受信アンテナARN及びAR1で受信された信号の包絡線情報に基づいて、各測定時間([0、Tf]及び[Tf、3Tf])にお
いて開口合成が成立する様に、位相の揃った信号部分を取得することができる。結果、任意の状況において実効的な受信アンテナの個数を増加させ、小型で多くのアンテナ(センサ)を備えたレーダ装置を実現することができる。即ち、実際の受信センサ数で分離可能な数より多くの目標に対して、精度の良い角度推定を実現することができる。
【0073】
図14は、実施例1のレーダ装置において時間ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。例えば、測角アルゴリズムとしてPRISMを用いた場合には、図4のシーン設定における各被探知目標の角度(0度及び3度)が正確に推定されている。
【0074】
図15は、実施例1のレーダ装置において周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。この場合には、信号処理部21は、開口合成された信号をフーリエ変換等により周波数ドメインに変換し、この変換後の周波数ドメインの信号に対して測角アルゴリズムを適用する。この場合においても、図4のシーン設定における各被探知目標の距離及び角度が正確に推定されている。なお、先程も注記したが、データクリッパ19によって包絡線の位相を揃えたデータを切り出した後ならば、周波数ドメインで位相補正を実施しても良い。
【0075】
従って、実施例1のレーダ装置1によれば、被探知目標が同一距離に複数存在し、かつ、各被探知目標が小さな速度差で運動している場合であっても、正確に被探知目標の角度及び距離を推定することができる。
【実施例2】
【0076】
以下、実施例2におけるレーダ装置について説明する。
【0077】
図16は、実施例2におけるレーダ装置1の構成を示すブロック図である。以下、実施例2のレーダ装置1における、実施例1と異なる各処理部についてそれぞれ説明する。実施例2におけるレーダ装置1は、基準組み合わせの一方の組み合わせ(送信アンテナAT1と受信アンテナARNとの組み合わせ)における受信アンテナARNに対応する処理系統にのみHYB16及び包絡線検波部17を有する。また、実施例2におけるレーダ装置1は、実施例1のデータクリッパ19に替え、包絡線周波数推定部(以降、EF推定部と表記する)31を有する。また、実施例2におけるレーダ装置1は、送信アンテナAT2に対応する処理系に遅延素子32を新たに有する。なお、他の処理部については実施例1と同様である。
【0078】
EF推定部31は、包絡線検波部17から包絡線信号を受け、この包絡線信号の周波数(通常、包絡線は幾つかの周波数を持つ信号成分から合成されているので、それらを合成した包絡線の周波数)を推定する。この周波数推定は、例えば、後述する式(3.3)を用いて算出される。更に、EF推定部31は、推定された周波数情報に応じて遅延量を算出する。この遅延量の算出は、例えば、後述する式(3.4)を用いて算出される。
【0079】
また、EF推定部31は、包絡線を構成する個々の信号成分の周波数の情報を取得する
ようにしてもよい。この場合、EF推定部31は、この周波数が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにして
もよい。
【0080】
遅延素子32は、EF推定部31により算出された遅延量分、発振モジュール22から送られたシステムリファレンス信号を遅延させる。これにより、送信アンテナAT2からのプローブ信号の放射時間が当該遅延量だけ遅らせられる。この遅延素子32に替え、スイッチ機構により当該遅延量に対応する時間、送信を停止させるようにしてもよい(例えば、CPUを経由して、スイッチコントローラ24にスイッチ25(#2)への制御信号を送る様に実装しても良い)。
【0081】
[実施例2における作用及び効果]
以下、実施例2におけるレーダ装置1の作用及び効果について説明する。
【0082】
ここで、説明を簡単にするために、上記式(2.2a)及び(2.2b)の総和項をMが2以上であるという条件の下で一般化すると、以下の式(3.2)で示すことができる。この一般化においては、煩雑さを避けるため、空間位相項を省略した。
【0083】
【数15】
この式(3.2)から、開口合成を成功させる為には、送信アンテナAT1から放射されたプローブ信号に対応して、基準受信アンテナARNで受信された信号の包絡線を構成する信号成分の周波数ωC(μm−μl)/2をそれぞれ予測し、これらの周波数成分から合成
された包絡線の位相が等しくなる時間分だけ送信アンテナAT2からのプローブ信号の放射を遅らせればよい事が分かる。例えば、M=2の場合においては、上記式(3.2)から、包絡線を構成する信号成分1つであり、その周波数ωenvは以下の式(3.3)で示す
ことができる。
【0084】
【数16】
そこで、送信アンテナAT2からプローブ信号を放射するタイミングを、遅延素子32によってΔT時間遅らせれば、式(3.4)に示すように、送信アンテナAT1から放射されたプローブ信号に対応して基準受信アンテナARNで受信されたエコー信号の包絡線の位相と、送信アンテナAT2から放射されたプローブ信号に対応して基準受信アンテナAR1で受信されたエコー信号の包絡線の位相とが2πの整数倍ずれて一致する。従って、各測定時間に於いて、各受信アンテナでは包絡線の一致した信号が受信される事に成る。なお、式(3.4)におけるkは自然数、aは実数を示す。また、v1及びv2はそれぞれ被探知目
標T1及びT2の速度を示す。
【0085】
【数17】
このようにして、実施例2によれば、送信アンテナAT1から放射されるプローブ信号に対応して基準受信アンテナARNで受信されたエコー信号の包絡線の周波数情報から算出される遅延量により、他の送信アンテナAT2からのプローブ信号の放射時間をΔTだけ遅延させることにより、各測定時間([0、Tf]及びΔT+[0、Tf])において開口合成が成立するデータの位相を揃えることができる(なお、図16に開示した装置で本実施例を適用する際の制限事項は、ΔT≧Tfであるが、コード分割多重等、直交性を特徴とす
る変調方式をプローブ信号の変調に採用した場合、この限りではない)。
【0086】
図17は、実施例2における包絡線成分の位相補正の結果を示すグラフである。図17では、被探知目標の諸元(距離、角度、速度)をT1(40m、0deg、10km/h
)及びT2(40m、3deg、12.0km/h)に設定し、SNRを30(dB)に
設定したシーンを利用した。図17によれば、両送信アンテナから放射されたプローブ信号に対応して各基準受信アンテナで受信された信号に対応する各復調信号の包絡線成分の位相が揃っていることがわかる。
【0087】
図18は、実施例2のレーダ装置において周波数ドメインで測角アルゴリズムを適用した場合の結果を示すグラフである。この場合には、信号処理部21は、開口合成された信号をフーリエ変換等により周波数ドメインに変換し、この変換後の周波数ドメインの信号に対して測角アルゴリズムを適用する(或いは、各送信アンテナの動作を通して、各受信信号の包絡線の位相補正は済んでいるので、例えば位相補正部20の中で各測定時間に得られた受信信号をフーリエ変換し、周波数ドメインに変換された信号に対して残留位相補正から開口合成まで施し、信号処理部21では測角アルゴリズム等の処理のみを行う様に実装しても良い)。この場合においても、上述のようなシーン設定における各被探知目標の距離及び角度が正確に推定されている。
【0088】
従って、実施例2のレーダ装置1によれば、実施例1と同様の効果を得ることができる。
【0089】
なお、本具体的実施例として開示した装置では、開口合成後の実効アンテナ数は2×N−1である。このような数の受信アンテナで構成されるアレーで検出可能なコヒーレント信号数は、測角アルゴリズムとしてFBSS−MUSICを考えた場合、ガウス記号、G[]用いてG[2×(2×N−1)/3]である。これにより、EF推定部31は、被探知目標数Mが2より大きい場合には、式(3.5)を最小化する値として、包絡線検波部17で得られた包絡線を構成する信号成分の周波数を推定する。式(3.5)において、当該包絡線成分を構成する信号成分の周波数は、例えば、ωenv=[ω1env、・・・、ωLenv]Tと定義される。そして、複数の正弦波の和としてモデル化した包絡線の周波数に対し、上記式(3.4)が成り立つ遅延量ΔTを求めるようにすれば良い。なお、式(3.5)におけるHIL[vTX1RX,N(t)]とは送信アンテナAT1から放射されたプローブ
信号に対応して基準受信アンテナARNで受信されたエコー信号に包絡線検波を施すことを意味する。
【0090】
【数18】
[変形例]
上述の実施例1及び2では、説明を簡単にするために、送信のために利用する共用アンテナを2つ(共用アンテナAR1/T1及びARN/T2)備える例を示したが、本実施形態はこのような形態に限定するものではない。当該共用アンテナは任意の数に設定することができ
る。例えば、M(M>2)個の送信アンテナが設けられている場合には、実施例2におけるレーダ装置1は、次のように動作するようにすればよい。レーダ装置1は、M個の送信アンテナのうち、少なくともどれか1つの送信アンテナATmから規定の時間QTfだけプ
ローブ信号を放射し、ATmに対応する基準受信アンテナARnから得られるエコー信号に包絡線検波を施し、包絡線の周波数ωenvを推定する。次に、レーダ装置1は、例えば、残
りの(M−1)個の送信アンテナから遅延量ΔT=2πkl/ωenv(kl∈Z、l≠m)
分遅延させてプローブ信号を放射するようにすればよい。
【0091】
また、1つのアンテナ素子を送信及び受信のために共用する態様ではなく、図19の例のように、別々のアンテナとして空間的に別の位置に配置するようにしてもよい。図19は、実施例1のレーダ装置の変形例を示す図である。変形例におけるレーダ装置1は、受信のためにのみ利用される受信アンテナAR1からARNと、送信のためにのみ利用される送信アンテナAT1及びAT2と、を含むアレイアンテナ11を持つ。この変形例では、各受信アンテナの間隔をdに設定した場合、各送信アンテナの間隔は(N−1)×dに設定する。これにより、例えば、送信アンテナAT1と受信アンテナAR1との組み合わせと、送信アンテナAT2と受信アンテナARNとの組み合わせが基準組み合わせとなる。なお、図19には、実施例1の変形例を示したが、このような構成は、実施例2に適用してもよい。図20は、この変形例におけるタイミングチャートである。
【0092】
また、本実施形態は、アンテナ(センサ)間隔が等間隔であることを限定するものでもない。また、包絡線の周波数がフーリエ変換を用いて検知できる程十分高い場合には、実施例1及び2におけるレーダ装置1の構成を図7に示すような構成に切り替えるようにしてもよい(例えば、実施例1の装置では、相互相関計算部18から概ね同じ大きさを持つピークが何カ所もの遅延量に対して得られる事で判定できる。但し、これらの複数のピークの中から最小の遅延量を必要な遅延量として採用すれば、態々、周波数ドメインに切り替えて位相補正を行う構成を組み込む事も無い)。また、包絡線周波数が所定の閾値よりも低い場合、即ち、相互相関が殆ど一定となる場合には、最小二乗法等で一次近似式を求め、線形トレンドとして包絡線成分の位相合わせを行うようにしてもよい(この様な場合は、復調信号がFMCWレーダ本来の定包絡線となっているので、上述の注記同様な操作を行っても良い事は言うまでも無い)。
【0093】
また、空間位相とドップラー成分による位相とが等しくなるような場合には、サンプリング周波数を変更する、不等間隔サンプリングを行う、被探知目標が正常に検出されていた時点に得られた目標諸元の値からカルマンフィルタ等の手段で予測される値を用いる、測定時間を所定時間ずらす、或いは、開口合成を行わないで測角を行う等、動作モードを切り替えるようにしてもよい。
【0094】
また、距離遅延によって定まる周波数ωBは、先に述べた様に比較的大きな値を取るの
で、これをフィルタバンク等によって先に検出し、vTX1/2RX、n(t)にexp(−jωBt)を掛けて下記式(4.1)の成分を復調すれば、式(4.1)は式(1.17)と
同じ形の式に書き直すことができる。言い替えれば、エコー信号がドップラー成分のみから構成されるかのように復調信号を扱うことで角度推定処理が可能となる。なお、vTX1/2RX、n(t)にexp(−jωBt)を掛けることに替え、全てのvTX1/2RX、n(t)に
包絡線検波を施すようにしてもよい。
【0095】
【数19】
但し、各信号に包絡線検波を施して得られる信号とは、|HIL(vTX1/2RX、n(t))|であるから、角度スペクトラムがピークを示す目標の角度は実際の値と符号が反転する。言い換えれば、各信号に包絡線検波を施して得られる信号は、100%変調に近いため、信号の絶対値に対して角度推定を行うこと、或いは、時間ダイバーシティによって開口合成を実現していることになる。なお、直交復調器でI/Qチャネルに分かれたベースバンド信号が得られる場合には、別途、包絡線検波部を用意する必要はなく、Iチャンネルの2乗とQチャンネルの2乗との和の平方根を取ることにより各包絡線成分を検出するようにすればよい。
【0096】
また、基準組み合わせを構成する受信アンテナを含め、全ての受信アンテナによる受信信号に包絡線検波を施し、開口合成後に得られる各受信アンテナの包絡線信号そのものに対して測角アルゴリズムを適用するようにしてもよい(これは上述した如く、エコー信号がドップラー成分のみから構成されるかのように復調信号を扱う手法と概ね等価であるから、測角結果の符号が反転しない様にするには、モノポーラ化している包絡線信号を最小位相等の大きさを参照してバイポーラ信号に変換する事が望ましい)。
【0097】
また、所定の速度分解能以下の速度差を持つ複数目標が存在する場合には、以下のように処理するようにしてもよい。即ち、受信アンテナ毎に受信信号を分岐して、一方は、速度分解能以上の周波数を遮断する第1のローパスフィルタ(LPF)を通し、もう一方は当該第1のLPFの遮断周波数以上の周波数を通過させる第2のLPF又はバンドパスフィルタ(BPF)を通す。第1LPF又は第2LPFを通過させた信号に自乗検波等を施すことにより開口合成の要否を判定し、この判定結果に応じて開口合成を実行するか否かを切り替えるようにしてもよい。
【0098】
[補足]
諸元(Tf=1/250(sec)、Δω=50(MHz))を持つレーダ装置で得ら
れたデータに512点のフーリエ変換を施した場合の周波数分解能、距離分解能は以下のとおりである(但し、ω+、ω-とはゼロ以上の最小の絶対値を持つ正、負側周波数である)。
【0099】
最小周波数(ゼロを除く):(ω+−ω-)/2π=250×2=500(Hz)
最大周波数:500×512/2=128(kHz)
最小距離:TfC0(ω+−ω-)/16Δω=0.75(m) (C0は光速度)
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0100】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウ
ェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0101】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【符号の説明】
【0102】
1 レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(HPA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16 分岐器(HYB)
17 包絡線検波部(HIL)
18 相互相関計算部(XCORR)
19 データクリッパ
20 位相補正部
21 信号処理部
22 発振モジュール
23 CPU(Central Processing Unit)
24 スイッチコントローラ
25 スイッチ
31 包絡線周波数推定部(EF推定部)
32 遅延素子
【特許請求の範囲】
【請求項1】
目標を探知するレーダ装置において、
送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから得られる信号の包絡線成分を取得する包絡線検波部と、
前記包絡線検波部により取得された包絡線成分に基づいて前記組み合わせ間の補正量を決定する決定部と、
前記決定部で決定された補正量を用いて、前記各受信アンテナから得られる信号の位相を合成する前に補正するか、又は、前記組み合わせと異なる他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記包絡線検波部は、前記各組み合わせにおける各受信アンテナから送られる各信号から包絡線成分をそれぞれ取得し、
前記決定部は、前記包絡線検波部により取得された各包絡線成分の相互相関を取ることにより各包絡線成分の遅延量を前記補正量として決定し、
前記補正部は、前記各受信アンテナから送られる信号の包絡線成分の位相を前記決定部で決定された補正量を用いて補正する、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記各送信アンテナからの信号放射を所定変調方式のための基準信号の周期に対応した各送信サイクル時間で順次切り替える制御部を更に備え、
前記包絡線検波部は、前記各組み合わせにおける各受信アンテナから送られる、前記各送信サイクル時間に対応する時間の各信号から包絡線信号をそれぞれ取得し、
前記決定部は、前記包絡線検波部で取得された各包絡線信号の時間長を揃えた後、各包絡線信号の相互相関を取ることにより前記包絡線成分の遅延量を前記補正量として決定し、
前記補正部は、前記各受信アンテナから送られる信号における前記決定部で決定された遅延量分遅延させたタイミングから前記各送信サイクル時間のうちの最小時間分の信号を抽出することにより位相補正を行う、
ことを特徴とする請求項2に記載のレーダ装置。
【請求項4】
前記決定部は、前記包絡線検波部により取得された包絡線信号の周波数を推定し、該推定された包絡線信号の周波数から前記組み合わせ間の補正量を決定し、
前記補正部は、前記他の組み合わせにおける送信アンテナから放射される信号を前記決定部で決定された補正量分遅延させる、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項5】
前記決定部は、各包絡線成分の相互相関のピーク値が所定閾値より低い場合には、所定変調方式のための基準信号の周期及び送信サイクル時間の少なくとも一方を変更することを特徴とする請求項3に記載のレーダ装置。
【請求項6】
前記送信アンテナがM個設けられ、
前記受信アンテナがN個設けられ、
前記決定部は、前記M個の送信アンテナと前記N個の受信アンテナとを開口合成して実現される実効的な受信アンテナ数L個に対して、G[2×L/3]個までの信号を用いることを許容して包絡線信号の周波数を推定する(但し、G[]はガウス記号である)、
ことを特徴とする請求項4に記載のレーダ装置。
【請求項7】
目標を探知する目標探知方法であって、
送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから得られる信号の包絡線成分を取得するステップと、
前記取得された包絡線成分に基づいて前記組み合わせ間の補正量を決定するステップと、
前記決定された補正量を用いて、前記各受信アンテナから得られる信号の位相を合成する前に補正するか、又は、前記組み合わせと異なる他の組み合わせにおける送信アンテナから放射される信号の位相を補正するステップと、
を含むことを特徴とする目標探知方法。
【請求項1】
目標を探知するレーダ装置において、
送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから得られる信号の包絡線成分を取得する包絡線検波部と、
前記包絡線検波部により取得された包絡線成分に基づいて前記組み合わせ間の補正量を決定する決定部と、
前記決定部で決定された補正量を用いて、前記各受信アンテナから得られる信号の位相を合成する前に補正するか、又は、前記組み合わせと異なる他の組み合わせにおける送信アンテナから放射される信号の位相を補正する補正部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記包絡線検波部は、前記各組み合わせにおける各受信アンテナから送られる各信号から包絡線成分をそれぞれ取得し、
前記決定部は、前記包絡線検波部により取得された各包絡線成分の相互相関を取ることにより各包絡線成分の遅延量を前記補正量として決定し、
前記補正部は、前記各受信アンテナから送られる信号の包絡線成分の位相を前記決定部で決定された補正量を用いて補正する、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記各送信アンテナからの信号放射を所定変調方式のための基準信号の周期に対応した各送信サイクル時間で順次切り替える制御部を更に備え、
前記包絡線検波部は、前記各組み合わせにおける各受信アンテナから送られる、前記各送信サイクル時間に対応する時間の各信号から包絡線信号をそれぞれ取得し、
前記決定部は、前記包絡線検波部で取得された各包絡線信号の時間長を揃えた後、各包絡線信号の相互相関を取ることにより前記包絡線成分の遅延量を前記補正量として決定し、
前記補正部は、前記各受信アンテナから送られる信号における前記決定部で決定された遅延量分遅延させたタイミングから前記各送信サイクル時間のうちの最小時間分の信号を抽出することにより位相補正を行う、
ことを特徴とする請求項2に記載のレーダ装置。
【請求項4】
前記決定部は、前記包絡線検波部により取得された包絡線信号の周波数を推定し、該推定された包絡線信号の周波数から前記組み合わせ間の補正量を決定し、
前記補正部は、前記他の組み合わせにおける送信アンテナから放射される信号を前記決定部で決定された補正量分遅延させる、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項5】
前記決定部は、各包絡線成分の相互相関のピーク値が所定閾値より低い場合には、所定変調方式のための基準信号の周期及び送信サイクル時間の少なくとも一方を変更することを特徴とする請求項3に記載のレーダ装置。
【請求項6】
前記送信アンテナがM個設けられ、
前記受信アンテナがN個設けられ、
前記決定部は、前記M個の送信アンテナと前記N個の受信アンテナとを開口合成して実現される実効的な受信アンテナ数L個に対して、G[2×L/3]個までの信号を用いることを許容して包絡線信号の周波数を推定する(但し、G[]はガウス記号である)、
ことを特徴とする請求項4に記載のレーダ装置。
【請求項7】
目標を探知する目標探知方法であって、
送信アンテナ及び受信アンテナの複数の組み合わせの中の少なくとも1つの組み合わせにおける受信アンテナから得られる信号の包絡線成分を取得するステップと、
前記取得された包絡線成分に基づいて前記組み合わせ間の補正量を決定するステップと、
前記決定された補正量を用いて、前記各受信アンテナから得られる信号の位相を合成する前に補正するか、又は、前記組み合わせと異なる他の組み合わせにおける送信アンテナから放射される信号の位相を補正するステップと、
を含むことを特徴とする目標探知方法。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2011−185618(P2011−185618A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−48308(P2010−48308)
【出願日】平成22年3月4日(2010.3.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月4日(2010.3.4)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]