
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置等には、複数の送信用センサ素子から構成される送信用センサアレイと複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせることにより、実効的に受信用のセンサアレイの開口を拡大する技術が採用された装置がある。以降、探知測距装置の具体例としてレーダ装置を例に挙げ説明する。上述のような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成、合成開口等と呼ばれる。
【0003】
開口合成を用いたレーダ装置は、複数の送信センサ素子から任意の方式で変調されたプローブ信号を、例えば時分割多重に従って、各送信センサに割り当てられたタイムスロット毎に放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、送信センサに割り当てられたタイムスロット毎に得られる各受信信号を合成する。結果として、このようなレーダ装置は、実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−80024号公報
【特許文献2】米国特許第7196656号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の開口合成レーダでは、開口合成を行う際の位相基準を与える受信センサの測定回数、スイッチ動作による利得又は位相の変動などのような開口合成技術を採用することから生じ得る問題点が考慮されていなかったため、角度推定の精度劣化や目標を角度スペクトラム上で分離する際のダイナミックレンジの低下を引き起こしていた。
【0006】
本発明の一態様に係る課題は、このような問題点に鑑み、被探知目標を正確に探知する開口合成技術を実現することにある。
【課題を解決するための手段】
【0007】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0008】
第1の態様は、目標を探知するためのレーダ装置に関する。この第1の態様に係るレーダ装置は、送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成され、当該各送信アンテナから所定タイミングで放射された各プローブ信号が上記目標で反射されて生じた各エコー信号を当該複数の受信アンテナで受信するアレイアンテナと、当該複数の受信アンテナで受信された各エコー信号を適切な復調部を通す事によって生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、当該複数の送信アンテナのアレイ多項式と当該複数の受信アンテナのアレイ多項式との積から
得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
【0009】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0010】
上記各態様によれば、被探知目標を正確に探知する開口合成技術を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態におけるレーダ装置の構成例を示すブロック図。
【図2】送信サイクル情報(P=1、Q=1)を用いた場合の送受信タイミングを示すタイミングチャート。
【図3】被探知目標と受信用センサアレイとの位置関係を示す概念図。
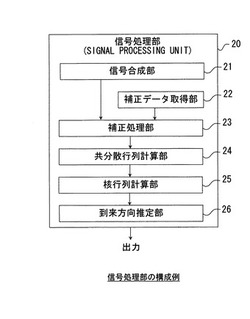
【図4】信号処理部20の構成例を示すブロック図。
【図5】ガウス平面において本実施形態における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図。
【図6】ガウス平面において比較対象レーダ装置における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図。
【図7】角度推定精度を示すグラフ。
【図8】変形例におけるレーダ装置の構成例を示すブロック図。
【発明を実施するための形態】
【0012】
以下、一実施形態として、プローブ信号にFMCW(Frequency Modulated Continuous
Wave)を採用したレーダ装置(以降、単にレーダ装置と表記する)について具体例を挙
げ説明を行う。実施形態としてのレーダ装置は、例えば、車両等に搭載される。しかしながら、本実施形態におけるレーダ装置は、それを搭載する物、装置、システムを限定するものではない。以下に挙げた実施形態は例示であり、本開示は以下の実施例の構成に限定されない。
【0013】
[装置構成]
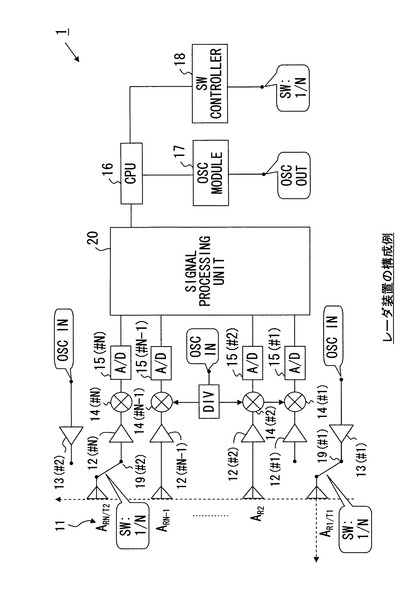
図1は、本実施形態におけるレーダ装置の構成例を示すブロック図である。本実施形態におけるレーダ装置1は、図1に示すように、アレイアンテナ11、低雑音増幅器(以降、LNAと表記する)12、電力増幅器(以降、HPAと表記する)13、ミキサ(図1に示すMIX)14、アナログデジタル(以降、A/Dと表記する)変換器15、信号処
理部20、発振モジュール(図1に示すOSC MODULE)17、CPU(Central Processing
Unit)16、スイッチコントローラ(図1に示すSW CONTROLLER)18等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0014】
発振モジュール17は、例えば、ベースバンド発振器と高周波電圧制御発振器とを含み、これらが作用することによりシステムリファレンス信号を出力する。具体的には、ベースバンド発振器から出力される基準信号が高周波電圧制御発振器へ送られ、その基準信号を用いて周波数変調された高周波信号が、高周波電圧制御発振器からシステムリファレンス信号として生成される。この基準信号には例えば三角波が利用される。なお、高周波電圧制御発振器に替え、電流制御型の発振器が利用されてもよい。また、発振モジュール1
7には、このようなアナログ式の回路構成ではなく、DDS(Direct Digital Synthesizer)等、デジタル的に直接FMCW信号を生成可能なモジュールが採用されてもよい。
【0015】
HPA13は、送信アンテナに対応する処理系統に設けられる。図1の例によれば、送信アンテナとして利用されるアンテナはAT1及びAT2の2つであるため、HPA13は2つ(HPA13(#1)及びHPA13(#2))設けられている。HPA13は、発振モジュール17から出力されたシステムリファレンス信号を増幅し、その増幅された信号を送信アンテナとして選択されている側のアンテナから目標探知用のプローブ信号として出力する。
【0016】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。図1の例では、直線状に配列された各アンテナ素子のうちの両端の2つのアンテナ素子が送信用及び受信用として共用され、それ以外のアンテナ素子は受信用のみとして利用される。以降、送信及び受信で共用されるアンテナ素子を共用アンテナAR1/T1又は
共用アンテナARN/T2と表記する。
【0017】
図1の例では、説明の便宜のために、共用アンテナが、スイッチ19により時分割で送信用又は受信用に切り替えられる例を示す。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように本実施形態におけるレーダ装置1では、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0018】
スイッチ19は、スイッチコントローラ18からの制御信号に応じて、共用アンテナを送信用として利用するか、受信用として利用するかを切り替える。具体的には、スイッチ19(#1)は、共用アンテナAR1/T1をHPA13(#1)に接続するか、LNA12
(#1)に接続するかを切り替える。共用アンテナAR1/T1はHPA13(#1)に接続
されると送信アンテナAT1として動作し、LNA12(#1)に接続されると受信アンテナAR1として動作する。同様に、スイッチ19(#2)は、共用アンテナARN/T2をHP
A13(#2)に接続するか、LNA12(#N)に接続するかを切り替える。共用アンテナARN/T2はHPA13(#2)に接続されると送信アンテナAT2として動作し、LN
A12(#N)に接続されると受信アンテナARNとして動作する。
【0019】
スイッチコントローラ18は、CPU16から送られてくる送信サイクル情報(P/Q)、及び発振モジュール17のベースバンド発振器から出力される基準信号の周期Tfに
応じて、スイッチ19の切り替えタイミングを制御する。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として、送信アンテナAT1を利用するタイムスロットの
比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。なお、ここでは、説明の便宜のため、個々の共用アンテナを1つのタイムスロットの中で送受用途に切り替える際のデューティー比は無視する。
【0020】
スイッチコントローラ18は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。続いて、スイッチコントローラ18は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用ア
ンテナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNと
して利用する。
【0021】
図2は、送信サイクル情報(P=1、Q=1)を用いた場合の送受信タイミングを示すタイミングチャートである。図2の例によれば、[0、Tf]の間、共用アンテナAR1/T1は所定の周期でプローブ信号の放射とエコー信号の受信とを行い、受信アンテナARNは継続的にエコー信号を受信する。[Tf、2Tf]の間には、共用アンテナARN/T2は所定の
周期でプローブ信号の放射とエコー信号の受信とを行い、受信アンテナAR1は継続的にエコー信号を受信する。このタイミングチャートに基づいて、本実施形態のレーダ装置1の動作の1周期は、タイムスロット[0、PTf]及びタイムスロット[PTf、(P+Q)Tf]により形成される(測定開始時刻が0とした場合)。具体的には、タイムスロット
[0、PTf]ではアンテナAR1/T1が共用アンテナとして動作し、アンテナAR2〜ARNが受信アンテナとして動作し、タイムスロット[PTf、(P+Q)Tf]ではアンテナARN/T2が共用アンテナとして動作し、アンテナAR1〜ARN-1が受信アンテナとして動作する
。
【0022】
LNA12は、受信アンテナに対応する処理系統に設けられる。図1の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ19(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ19(#2)の切り替えにより受信アンテナARNに接続される。LNA12は、接続される受信アンテナから受信信号を受け、この受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0023】
ミキサ14は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール17から送られるシステムリファレンス信号と混合させることにより、高周波エコー信号をベースバンド信号に変換する。なお、図1においてはフィルタ等、必ずしも全てのコンポーネントを明示している訳ではない。
【0024】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリング周波数でデジタルベースバンド信号に変換する。以降、このデジタルベースバンド信号を単に復調信号と表記する。このように変換された各復調信号はそれぞれ信号処理部20へ送られる。
【0025】
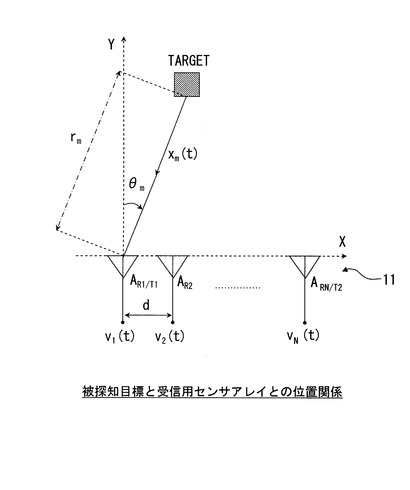
図3は、被探知目標と受信用センサアレイとの位置関係を示す概念図である。図3では、センサアレイ11が受信アンテナ数N、素子間隔dの等間隔リニアアレイアンテナを形成し、座標原点から距離rm、角度θmの位置に、独立したM個の被探知目標(図3に示すTARGET)が存在する例を示す。角度θmは、図3に示すY軸の正方向を0度に設定し、図
3の時計回りを正方向に設定した場合に示される角度である。また、図3では、被探知目標を1つのみ示しているが、図1の装置によって探知可能な最大の被探知目標の数Mは、各目標が装置に対して略等しい距離を略等しい速度(方向も含めて)で運動している場合、[]をガウス記号として、例えば、[(2N−1)/2]以下の数となる。
【0026】
図3によれば、ベースバンド信号xmT1(t)が角度θmでセンサアレイ11に入射しているイメージが示されている。ここで、ベースバンド信号xmT1(t)とは、アンテナAR1/T1から探知領域に向けて放射されたプローブ信号がm番目の被探知目標で反射されることにより生成されたエコー信号(被探知目標の位置情報等を含む)であって、このエコー信号が上述のような各処理部で復調処理された結果得られるであろう信号を示す。なお、mは1からMまでの整数を示し、tは時間を示す。以降、このベースバンド信号xmT1(
t)を目標エコー信号と表記する。
【0027】
これにより、アンテナAR1/T1から探知領域に向けて放射されたプローブ信号に対応し
て、n番目のアンテナARnで受信され、上述の各処理部で信号処理されることにより得られる復調信号vnT1(t)は、以下の式(1.1)のように表わすことができる。下記式
(1.2)で示されるφn,mT1は、被探知目標の角度が反映された空間位相、即ち、受信
アンテナARnにおける第m波の受信位相を示し、nnT1(t)は、電力σの加法性ガウス
雑音を示す。また、nは、1からN(受信アンテナ数)までの整数である。以降、式(1.1)で示す復調信号vnT1(t)を合成エコー信号と表記する。
【0028】
【数1】

【0029】
このような復調信号vnT1(t)が得られるのは、図2に示すタイムスロット[0、Tf]時である。一方で、図2に示すタイムスロット[Tf、2Tf]においては、以下の式(1.3)で示す合成エコー信号vnT2(t)が得られる。タイムスロット[Tf、2Tf]
では、ARN/T2が共用アンテナとして利用され、AR1からARN-1が受信用アンテナとして
利用される。なお、下記式(1.3)は、次のような考え方に基づいている。つまり、上述したように、基準信号の周期がTfであるから、本レーダ装置1は、2π/Tfを基本周波数として動作する。これにより、アンテナARN/T2から放射されるプローブ信号に対す
る目標エコー信号は、xmT2(t)≒xmT1(t+Tf)と考えることができ、更に、上記
基本周波数に関する考察から、xmT1(t+Tf)≒xmT1(t)と考えることができる。
但し、空間位相φn,mT2は、基準点となる送信アンテナの位置が違うので、空間位相φn,mT1とは異なる。
【0030】
【数2】
【0031】
以上のような各合成エコー信号がそれぞれ信号処理部20へ送られる。
【0032】
信号処理部20は、各合成エコー信号に開口合成処理を施し、開口合成された信号に基づいて、被探知目標の位置情報を推定する。以下、信号処理部20について詳述する。
【0033】
図4は、信号処理部20の構成例を示すブロック図である。図4に示すように、信号処理部20は、信号合成部21、補正データ取得部22、補正処理部23、共分散行列計算部24、核行列計算部25、到来方向推定部26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそ
れぞれ実現される([その他]の項参照)。
【0034】
信号合成部21は、上述のように、本実施形態のレーダ装置1に於ける動作の1周期を通して得られた2N個の各合成エコー信号を開口合成する。信号合成部21は、このとき、合成エコー信号の位相の基準点を統一する操作を施す。ここで、基準点には、2つのタイムスロットの間で等しい空間位相を与えるような送信アンテナと受信アンテナとの組み合わせから得られる各合成エコー信号が利用される。即ち、図2のタイミングチャートにおけるタイムスロット[0、Tf]にアンテナAR1から得られる合成エコー信号v1T1(t)と、タイムスロット[Tf、2Tf]にアンテナARNから得られる合成エコー信号vNT2
(t)とが利用される。
【0035】
信号合成部21は、上記位相の基準点を統一する操作として、補正量dφ(t)(=arg[v1T1(t)]−arg[vNT2(t)])を計算し、この補正量dφ(t)とvnT2(t)とを用いてvnT2(t)*exp(−jdφ(t))を計算し(但し、n=1〜N)、得られた値を改めてvnT2(t)とする。結果、信号合成部21は、以下の式(1.
5)に示す開口合成エコー信号vを生成する。式(1.5)に示すように、合成エコー信号v1T1(t)及びvNT2(t)は空間位相が等しいため足し合わされ、結果として、開口合成エコー信号vの要素数は(2N−1)となる。信号合成部21は、生成された開口合成エコー信号を補正処理部23へ送る。
【0036】
【数3】
【0037】
補正データ取得部22は、上述の開口合成エコー信号を補正するための補正データを取得し、その補正データを補正処理部23へ送る。この補正データは、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数(fl)を用いた補正行列C又は補正ベクト
ルcとして取得される。係数flは、送信アンテナ及び受信アンテナの各種パラメータに
基づいて以下の式(2.1a)、(2.1b)及び(2.1c)のようなアレイ多項式により予め設計され、メモリ等に調整可能な値として保持される。送信アンテナ及び受信アンテナの各種パラメータは、以下の式(2.1c)の合成アレイ多項式f(z)が、素子間隔d及び素子数Lの等間隔リニアアレイアンテナを示すように設計される。また、各種パラメータとしては、送信アンテナ及び受信アンテナに関する素子数、素子間隔、利得特性、位相特性等が利用される。
【0038】
【数4】
【0039】
上記式のηkは、基準素子間隔dに対する送信素子の配置間隔の倍率を表わす係数であ
る。gkは、各送信アンテナの利得特性又は位相特性又はこれらの組み合わせを示す複素
定数である。添え字kは、各送信アンテナを示し、1から送信アンテナ数(K)までの整数である。本実施形態では、添え字kは1及び2である。μnは、基準素子間隔dに対す
る受信素子の配置間隔の倍率を表わす係数である。hnは、各受信アンテナの利得特性又
は位相特性又はこれらの組み合わせを示す複素定数である。添え字nは、各受信アンテナを示し、1から受信アンテナ数(N)までの整数である。本実施形態では、添え字nは、1からNまでの整数である。また、zは、システムリファレンス信号の波長λ、及び、レーダ視野角(FOV(Field Of View))に含まれる任意の角度θに対して、z=exp(
j(2πd/λ)sinθ)で定義される。また、Lは、合成アレイ多項式f(z)において各次数をまとめた際の項数を示す。
【0040】
補正データ取得部22は、各係数(fl)を取得すると、これらを用いて補正行列C又
は補正ベクトルcを取得する。補正行列Cは、以下の式(2.2a)で示し、補正ベクトルcは、以下の式(2.2b)で示す。補正データ取得部22は、このように取得された補正データ(補正ベクトルc又は補正行列C)を補正処理部23へ送る。
【0041】
【数5】
【0042】
補正処理部23は、信号合成部21から送られる開口合成エコー信号に、補正データ取得部22から得られる補正データを適用することにより、開口合成エコー信号を補正する。具体的には、以下の式(2.3a)に示されるように、補正処理部23は、開口合成エコー信号vに補正行列Cを掛け合わせることにより、開口合成エコー信号を補正する(式(2.3a)参照)。補正処理部23は、開口合成エコー信号vと補正ベクトルcとのアダマール積(要素毎の乗算)を取ることにより、開口合成エコー信号を補正するようにし
てもよい(式(2.3b)参照)。以降、補正処理部23により補正された信号を補正エコー信号と表記する。この補正エコー信号は、共分散行列計算部24へ送られる。
【0043】
【数6】
【0044】
共分散行列計算部24は、補正処理部23から送られる補正エコー信号から共分散行列を計算する。なお、本実施形態では、この共分散行列の計算手法を限定するものではないため、ここでは説明を簡略化する。例えば、MUSIC(Multiple Signal Classification)法が利用される場合には、補正エコー信号wと、そのエルミート共役転置wHとの積
から得られる行列に対して前方空間平均(Forward SS)が適用されることで行列RMUSICFSSが得られる。更に、反対角行列Jと補正エコー信号wの複素共役w*との積から得られ
る信号ベクトル(Jw*)と、そのエルミート共役転置(Jw*)Hとの積から得られる行
列に後方空間平均(Backward SS)が適用されることで行列RMUSICBSSが得られる。共分
散行列計算部24は、行列RMUSICFSSと行列RMUSICBSSとを加算して2で除算することで得られる行列を共分散行列RMUSICFBSSとして取得する。また、PRISM(Propagator-method based on an Improved Spatial-smoothing Matrix)法では、補正エコー信号wと、その要素の一部とから一般化Hankel構造を持つ準共分散行列RPRISMが取得され
る。なお、この行列RPRISMは、MUSIC法等で用いられる通常の共分散と同じ情報を
持っているが、行列の構造が違うので、両者を区別する為に本明細書中では準共分散行列と表記する。
【0045】
核行列計算部25は、共分散行列計算部24により取得された共分散行列から角度推定のための行列(以降、核行列と表記する)を計算する。なお、本実施形態では、この核行列の計算手法を限定するものではないため、ここでは説明を簡略化する。上述のようにMUSIC法が利用される場合には、共分散行列RMUSICFBSSを固有値分解することにより
、雑音部分空間を張る固有ベクトルから成る行列EN、信号部分空間を張る固有ベクトル
から成る行列ESがそれぞれ取得され、この行列ENと行列ENの複素共役転置との積が核
行列ΩMUSICとして取得される。
【0046】
また、PRISM法では、準共分散行列RPRISMから部分行列R1及びR2が取得され(
以下の式(2.4a)参照)、部分行列R1及びR2を用いて線形演算子Гが生成される(以下の式(2.4b)参照)。以下の式(2.4b)で示すHは複素共役転置を示す。更
に、線形演算子Гと((2N−1)−2M)次の単位行列I(2N-1)-2Mとを用いて、以下
の式(2.4c)に示すようにプロパゲータ行列Πが生成される。なお、Mはガウス記号[]を用いて[(2N−2)/2]である。更に、線形演算子Г及び部分行列R1及びR2から以下の式(2.4d)のようにスケーリング行列Λが生成される。最終的に、核行列計
算部25は、プロパゲータ行列Π、及び、スケーリング行列Λを用いることにより核行列ΩPRISMを式(2.4e)により計算する。
【0047】
【数7】
【0048】
なお、共分散行列計算部24及び核行列計算部25で利用され得るMUSIC法、PRISM法等は周知の手法であり、その他周知の手法が利用されるようにしてもよい。MUSIC法としては、参照文献(IEEE Trans. Antennas Propagation, Vol. 34, (Mar. 1986), pp.276-280)を援用する。また、PRISM法としては、参照文献(IEEE Trans. Intelligent Transportation Systems, Vol. 9, No. 3, (Sept. 2008), pp. 451-461)又は参照文献(国際公開第2006/67869号;特願2006−548672)を援用する。
【0049】
到来方向推定部26は、核行列計算部25により算出された核行列を用いることにより角度推定を行う。本実施形態では到来方向推定部26で利用される角度推定手法を限定しない。この角度推定手法は周知の技術が利用されればよい。例えば、核行列計算部25により算出された核行列を用いることで角度スペクトラムが算出される(以下の式(2.5a)又は式(2.5b)参照)。そして、この角度スペクトラムでモードベクトルa(θ)(式(2.5c)参照)のパラメータθを走査することにより(但し、簡単の為,核行列の次元をS×Sとした)、P(θ)がピークを示すθの値から被探知目標の角度θm(
m=1〜M)が推定される。
【0050】
【数8】
【0051】
その他の手法として、到来方向推定部26は、核行列計算部25により算出された核行列Ωを用いた以下の式(2.6a)で定義される代数方程式を解くことにより、角度推定
を行うようにしてもよい。なお、行列Ωが(S×S)次の行列とした場合に、式(2.6a)のベクトルa(z)は以下の式(2.6c)で定義される。この場合には、例えば、m番目の解として、以下の式(2.6b)のような値が得られ、この値|zm|が1に近
似する場合に、到来方向推定部26は、θm=arcsin[(λ/(2πd))arg
(zm)]を用いて角度を推定するようにしても良い。
【0052】
【数9】
【0053】
[実施形態における作用及び効果]
以下、上述の実施形態におけるレーダ装置1の作用及び効果について説明する。
【0054】
本実施形態におけるレーダ装置1では、図2に示すタイミングチャートに応じて送信アンテナAT1及びAT2から放射されたプローブ信号が、m個の被探知目標で反射されることにより各エコー信号がそれぞれ生成され、受信アンテナAR1〜ARNにそれぞれ入射される。レーダ装置1では、LNA12、ミキサ14、A/D変換器15等が動作することにより、各エコー信号から、1周期動作(図2の例によるタイムスロット[0、Tf]及び[
Tf、2Tf])で2N個の各合成エコー信号がそれぞれ取得される。
【0055】
このように取得された2N個の各合成エコー信号が、図4に示す信号合成部21により開口合成される。この開口合成により得られた開口合成エコー信号は上記式(1.5)で示すことができる。このとき、目標エコー信号ベクトルx及び雑音信号ベクトルnを以下の式(3.1)及び式(3.2)のように定義し、更に、角度行列Aを式(3.3)及び(3.4)で定義した場合、開口合成エコー信号に関し、以下の式(3.5)のようなアレイ信号処理の基本関係式を導くことができる。これにより、式(3.3)で示すような角度行列Aを用いることにより、本実施形態におけるレーダ装置1が(2N−1)個の受信アンテナで構成された等間隔リニアアレイアンテナを備えたレーダ装置として機能することが分かる。
【0056】
【数10】
【0057】
ところで、上記式(3.3)にはモードベクトルa(θ)の要素が2となっている箇所が存在する。これは、以下の式(4.3)で示すような開口合成後のアレイ多項式の係数に2が現れることからも証明される。開口合成後のアレイ多項式f(z)は、式(4.1)に示す送信アンテナのアレイ多項式gTX(z)と、式(4.2)に示す受信アンテナのアレイ多項式hRX(z)との積として表わされる。但し、z=exp(j(2πd/λ)sinθ)である。
【0058】
【数11】
【0059】
上述のように開口合成後のアレイ多項式f(z)において係数が2となっている項は、開口合成後の等間隔リニアアレイのN番目のアンテナでデータ測定を2回行っていることを意味する。これにより、上記式(1.5)を以下の式(4.4)として上記式(3.3)を以下の式(4.5)としたとしても、上記式(3.5)と同じアレイ信号処理の基本関係式が成立する。
【0060】
【数12】
【0061】
この様な考え方に基づいて、本実施形態におけるレーダ装置1では、信号合成部21により得られた開口合成エコー信号が、補正データ取得部22により取得された補正データを利用することにより補正処理部23で補正される。補正データは、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数(fl)をキャンセルするように設定された
補正行列又は補正ベクトルとして取得される。
【0062】
本実施形態では、このように、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数がキャンセルされた開口合成エコー信号を利用して、共分散行列を計算し(共分散行列計算部24)、この共分散行列から核行列が取得される(核行列計算部25)。結果、このように取得された核行列から、到来方向推定部26により角度推定が行われる。
【0063】
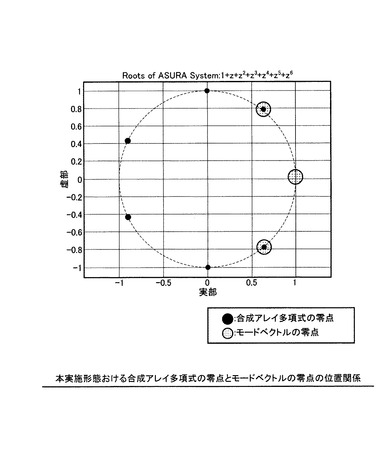
図5は、ガウス平面において本実施形態における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図である。図5は、送信アンテナ数が2であり受信アンテナ数Nが4の場合を例示している。本実施形態では、合成アレイ多項式の零点(図5に示す黒色の点)が円周上に等しい間隔で並んでいる。更に、パラメータθの値に従ってガウス平面上を連動して動き回り、角度スペクトラム走査を行う際に用いられるモードベクトル(上記式(2.5b)参照)の零点(図5に示すドット柄の点)が合成アレイ多項式の零点と複数箇所で一致している。これは、合成アレイ多項式とモードベクトルとの位相的な不整合がないことを示す。
【0064】
ところで、本実施形態のレーダ装置1とは異なり、補正データ取得部22及び補正処理部23によって本実施形態のような開口合成エコー信号の補正を行うことなく角度推定を行うレーダ装置が存在する。以降、このようなレーダ装置を比較対象レーダ装置と表記し、この比較対象レーダ装置における角度推定処理について説明する。
【0065】
比較対象レーダ装置における角度推定処理で利用される信号ベクトルは、受信アンテナ数Nを3(2N−1=5)とすると、例えば、以下の式(5.1)で与えられる。比較対象レーダ装置では、下記式(5.1)のように補正されない状態の開口合成エコー信号が利用される。
【0066】
ここで、測角アルゴリズムとしてMUSIC法が適用される場合、式(5.1)の信号ベクトルが用いられることにより下記式(5.2)のような共分散行列RMUSICが生成さ
れ、その共分散行列RMUSICに対して前方空間平均を適用して下記式(5.3)のような
共分散行列RMUSICFSSが得られる。また、反対角行列Jとvの複素共役との積Jv*に対
して共分散行列が取得され、この共分散行列に後方空間平均を適用した行列RMUSICBSSが更に取得され、角度推定に用いる共分散行列として以下の式(5.4)の行列RMUSICFBS
Sが得られる。このように得られた共分散行列RMUSICFBSSを以下の式(5.4)に示すように固有値分解して雑音部分空間を張る固有ベクトルから成る行列EN、信号部分空間を
張る固有ベクトルから成る行列ESがそれぞれ取得され、この行列ENと行列ENの複素共
役転置との積が核行列ΩMUSICとして取得される(式(5.5)参照)。結果、このよう
な核行列ΩMUSICが利用されることにより角度推定が行われる。
【0067】
【数13】
【0068】
一方で、測角アルゴリズムとしてPRISM法が適用される場合、式(5.1)の信号ベクトルが用いられることにより下記式(5.6)のような準共分散行列RPRISMが生成
される。この準共分散行列RPRISMが利用されることにより、上記式(2.4b)、式(
2.4c)、式(2.4d)及び式(2.4e)により核行列ΩPRISMが生成される。結
果、このような核行列ΩPRISMが利用されることにより角度推定が行われる。
【0069】
【数14】
【0070】
このように、比較対象レーダ装置で利用される各共分散行列には、何れの測角アルゴリズムが適用された場合でも、係数が掛かった要素が含まれる。共分散行列の要素に係数が掛かっていると、例えば、行列を固有値分解した際の固有値が本来のそれとは異なった値
となる。これにより、固有ベクトルが変化することにより、角度推定の精度の劣化を引き起こす。
【0071】
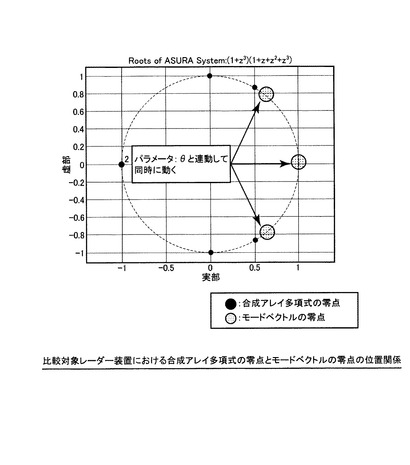
図6は、ガウス平面において比較対象レーダ装置における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図である。図6は、図5と同様に、送信アンテナ数が2であり受信アンテナ数Nが4の場合を例示している。図6に示すように、比較対象レーダ装置における開口合成後のアレイ多項式は、上記式(4.3)に示すように、円周等分多項式とは異るため、零点の間隔が異なっており、更に重根(図6に示す“2”を付した黒色の点)まで発現している。これは、合成アレイ多項式とモードベクトルとの位相的な不整合が存在することを示しており、モードベクトルで走査したとしても、近接した零点や重根の影響を受け、角度スペクトラムのダイナミックレンジが劣化する等の現象が発生することを示す。
【0072】
図7は、角度推定精度を示すグラフである。図7は、送信アンテナ数Kが2で受信アンテナ数Nが4であり基準アンテナ間隔dが1.8λである開口合成アレイアンテナを備える比較対象レーダ装置及び本実施形態におけるレーダ装置1における角度推定精度をそれぞれ示している。他の条件としては、キャリア周波数が76ギガヘルツ(GHz)、片側変調帯域が50メガヘルツ(MHz)、変調周期が4ミリ秒(msec)であるFMCWが採用され、以下に示す目標諸元(距離、速度及び角度)をそれぞれ持つ2つの被探知目標T1及びT2が設定されている。また、SNRは20デシベル(dB)に設定されている。
【0073】
T1:40メートル(m)、0キロ毎時(km/h)、0度
T2:40(m)、0(km/h)、3度
図7における右下以外の3つのグラフでは、測角アルゴリズムの各々について、角度(X軸)及び距離(Y軸)から構成される平面上に角度スペクトラムレベルがZ軸の色彩によって表わされる。FFT−DBFと表記されたグラフは、上記比較対象レーダ装置において測角アルゴリズムとしてデジタルビームフォーマ(フーリエ変換を用いたDBF(Digital-Beam-Former))法が適用された場合の結果を示す。mPRISMと表記されたグ
ラフは、上記比較対象レーダ装置において測角アルゴリズムとして参照文献(特願2009−201624)により援用される改良PRISM法が適用された場合の結果を示す。一方で、mPRISM+と表記されたグラフは、本実施形態のレーダ装置1において測角アルゴリズムとして参照文献(特願2009−201624)により援用される改良PRISM法が適用された場合の結果を示す。また、右下のグラフは、上記3つの環境を含む4つの環境において、被探知目標の存在する距離における角度スペクトラムのレベルを示す。
【0074】
図7の右下のグラフに示すように、比較対象レーダ装置における角度推定では推定精度に2度程度の誤差が生じているのに対して、本実施形態におけるレーダ装置1における角度推定では、1度程度の誤差に改善されている。即ち、本実施形態におけるレーダ装置1における角度推定では、比較対象レーダ装置における角度推定に比較して、角度推定精度が改善されている。更に、図7の各グラフに示されるように、本実施形態におけるレーダ装置1における角度推定では、2つの被探知目標が明確に区別できるのに対して、比較対象レーダ装置における角度推定では明瞭さが欠けてしまっている。即ち、被探知目標間の識別を容易にするためのスペクトラムのダイナミックレンジについても本実施形態におけるレーダ装置1における角度推定では、比較対象レーダ装置における角度推定に比較して改善されている。
【0075】
このように、本実施形態におけるレーダ装置1によれば、開口合成エコー信号を等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数により補正することにより、角度推定精度が向上し、角度スペクトラムのダイナミックレンジを改善することができる。
従って、本実施形態におけるレーダ装置1によれば、正確に被探知目標の角度及び距離を推定することができる。
【0076】
[変形例]
上述の実施形態では、メモリ等に調整可能な値として予め保持されている係数flが開
口合成エコー信号を補正するために利用されていた。しかしながら、本実施形態はこのような構成に限定するものではなく、当該係数flが各合成エコー信号の電力レベルに基づ
いて更新されるようにしてもよい。
【0077】
図8は、変形例におけるレーダ装置の構成例を示すブロック図である。変形例におけるレーダ装置は、上述の実施形態における構成に加えて、各A/D変換器15から得られる各合成エコー信号の電力レベルを測定する電力測定部30を更に有する。電力測定部30は、各合成エコー信号の電力レベルを測定し、全合成エコー信号の電力レベルの合計値に対する各合成エコー信号の電力レベルの割合をそれぞれ算出する。なお、電力測定部30による電力レベルの測定は、フーリエ変換、自乗検波器等のような周知の技術が適用されることにより行われればよいため、ここでは説明を省略する。
【0078】
本変形例では、補正データ取得部22が、電力測定部30により算出された各割合値を取得し、この取得された各割合値を予めメモリ等に保持されている合成多項式の各項の係数flに掛け合わせることにより最新の係数flを決定する。このとき、合成多項式の各項のうち、各開口合成エコー信号に対応する項の係数にその開口合成エコー信号に対応する割合値が掛け合わされる。補正データ取得部22は、そのように決定された最新の係数flを用いて補正ベクトル又は補正行列を取得する。
【0079】
これにより、開口合成エコー信号を補正するために利用される係数が各エコー信号の受信状況に応じてリアルタイムに更新されるため、より精度の高い角度推定を行うことが可能となる。
【0080】
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0081】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0082】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【符号の説明】
【0083】
1 レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(HPA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16 CPU(Central Processing Unit)
17 発振モジュール
18 スイッチコントローラ
20 信号処理部
21 信号合成部
22 補正データ取得部
23 補正処理部
24 共分散行列計算部
25 核行列計算部
26 到来方向推定部
30 電力測定部
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置等には、複数の送信用センサ素子から構成される送信用センサアレイと複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせることにより、実効的に受信用のセンサアレイの開口を拡大する技術が採用された装置がある。以降、探知測距装置の具体例としてレーダ装置を例に挙げ説明する。上述のような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成、合成開口等と呼ばれる。
【0003】
開口合成を用いたレーダ装置は、複数の送信センサ素子から任意の方式で変調されたプローブ信号を、例えば時分割多重に従って、各送信センサに割り当てられたタイムスロット毎に放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、送信センサに割り当てられたタイムスロット毎に得られる各受信信号を合成する。結果として、このようなレーダ装置は、実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−80024号公報
【特許文献2】米国特許第7196656号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の開口合成レーダでは、開口合成を行う際の位相基準を与える受信センサの測定回数、スイッチ動作による利得又は位相の変動などのような開口合成技術を採用することから生じ得る問題点が考慮されていなかったため、角度推定の精度劣化や目標を角度スペクトラム上で分離する際のダイナミックレンジの低下を引き起こしていた。
【0006】
本発明の一態様に係る課題は、このような問題点に鑑み、被探知目標を正確に探知する開口合成技術を実現することにある。
【課題を解決するための手段】
【0007】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0008】
第1の態様は、目標を探知するためのレーダ装置に関する。この第1の態様に係るレーダ装置は、送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成され、当該各送信アンテナから所定タイミングで放射された各プローブ信号が上記目標で反射されて生じた各エコー信号を当該複数の受信アンテナで受信するアレイアンテナと、当該複数の受信アンテナで受信された各エコー信号を適切な復調部を通す事によって生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、当該複数の送信アンテナのアレイ多項式と当該複数の受信アンテナのアレイ多項式との積から
得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
【0009】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0010】
上記各態様によれば、被探知目標を正確に探知する開口合成技術を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態におけるレーダ装置の構成例を示すブロック図。
【図2】送信サイクル情報(P=1、Q=1)を用いた場合の送受信タイミングを示すタイミングチャート。
【図3】被探知目標と受信用センサアレイとの位置関係を示す概念図。
【図4】信号処理部20の構成例を示すブロック図。
【図5】ガウス平面において本実施形態における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図。
【図6】ガウス平面において比較対象レーダ装置における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図。
【図7】角度推定精度を示すグラフ。
【図8】変形例におけるレーダ装置の構成例を示すブロック図。
【発明を実施するための形態】
【0012】
以下、一実施形態として、プローブ信号にFMCW(Frequency Modulated Continuous
Wave)を採用したレーダ装置(以降、単にレーダ装置と表記する)について具体例を挙
げ説明を行う。実施形態としてのレーダ装置は、例えば、車両等に搭載される。しかしながら、本実施形態におけるレーダ装置は、それを搭載する物、装置、システムを限定するものではない。以下に挙げた実施形態は例示であり、本開示は以下の実施例の構成に限定されない。
【0013】
[装置構成]
図1は、本実施形態におけるレーダ装置の構成例を示すブロック図である。本実施形態におけるレーダ装置1は、図1に示すように、アレイアンテナ11、低雑音増幅器(以降、LNAと表記する)12、電力増幅器(以降、HPAと表記する)13、ミキサ(図1に示すMIX)14、アナログデジタル(以降、A/Dと表記する)変換器15、信号処
理部20、発振モジュール(図1に示すOSC MODULE)17、CPU(Central Processing
Unit)16、スイッチコントローラ(図1に示すSW CONTROLLER)18等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0014】
発振モジュール17は、例えば、ベースバンド発振器と高周波電圧制御発振器とを含み、これらが作用することによりシステムリファレンス信号を出力する。具体的には、ベースバンド発振器から出力される基準信号が高周波電圧制御発振器へ送られ、その基準信号を用いて周波数変調された高周波信号が、高周波電圧制御発振器からシステムリファレンス信号として生成される。この基準信号には例えば三角波が利用される。なお、高周波電圧制御発振器に替え、電流制御型の発振器が利用されてもよい。また、発振モジュール1
7には、このようなアナログ式の回路構成ではなく、DDS(Direct Digital Synthesizer)等、デジタル的に直接FMCW信号を生成可能なモジュールが採用されてもよい。
【0015】
HPA13は、送信アンテナに対応する処理系統に設けられる。図1の例によれば、送信アンテナとして利用されるアンテナはAT1及びAT2の2つであるため、HPA13は2つ(HPA13(#1)及びHPA13(#2))設けられている。HPA13は、発振モジュール17から出力されたシステムリファレンス信号を増幅し、その増幅された信号を送信アンテナとして選択されている側のアンテナから目標探知用のプローブ信号として出力する。
【0016】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。図1の例では、直線状に配列された各アンテナ素子のうちの両端の2つのアンテナ素子が送信用及び受信用として共用され、それ以外のアンテナ素子は受信用のみとして利用される。以降、送信及び受信で共用されるアンテナ素子を共用アンテナAR1/T1又は
共用アンテナARN/T2と表記する。
【0017】
図1の例では、説明の便宜のために、共用アンテナが、スイッチ19により時分割で送信用又は受信用に切り替えられる例を示す。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように本実施形態におけるレーダ装置1では、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0018】
スイッチ19は、スイッチコントローラ18からの制御信号に応じて、共用アンテナを送信用として利用するか、受信用として利用するかを切り替える。具体的には、スイッチ19(#1)は、共用アンテナAR1/T1をHPA13(#1)に接続するか、LNA12
(#1)に接続するかを切り替える。共用アンテナAR1/T1はHPA13(#1)に接続
されると送信アンテナAT1として動作し、LNA12(#1)に接続されると受信アンテナAR1として動作する。同様に、スイッチ19(#2)は、共用アンテナARN/T2をHP
A13(#2)に接続するか、LNA12(#N)に接続するかを切り替える。共用アンテナARN/T2はHPA13(#2)に接続されると送信アンテナAT2として動作し、LN
A12(#N)に接続されると受信アンテナARNとして動作する。
【0019】
スイッチコントローラ18は、CPU16から送られてくる送信サイクル情報(P/Q)、及び発振モジュール17のベースバンド発振器から出力される基準信号の周期Tfに
応じて、スイッチ19の切り替えタイミングを制御する。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として、送信アンテナAT1を利用するタイムスロットの
比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。なお、ここでは、説明の便宜のため、個々の共用アンテナを1つのタイムスロットの中で送受用途に切り替える際のデューティー比は無視する。
【0020】
スイッチコントローラ18は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。続いて、スイッチコントローラ18は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用ア
ンテナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNと
して利用する。
【0021】
図2は、送信サイクル情報(P=1、Q=1)を用いた場合の送受信タイミングを示すタイミングチャートである。図2の例によれば、[0、Tf]の間、共用アンテナAR1/T1は所定の周期でプローブ信号の放射とエコー信号の受信とを行い、受信アンテナARNは継続的にエコー信号を受信する。[Tf、2Tf]の間には、共用アンテナARN/T2は所定の
周期でプローブ信号の放射とエコー信号の受信とを行い、受信アンテナAR1は継続的にエコー信号を受信する。このタイミングチャートに基づいて、本実施形態のレーダ装置1の動作の1周期は、タイムスロット[0、PTf]及びタイムスロット[PTf、(P+Q)Tf]により形成される(測定開始時刻が0とした場合)。具体的には、タイムスロット
[0、PTf]ではアンテナAR1/T1が共用アンテナとして動作し、アンテナAR2〜ARNが受信アンテナとして動作し、タイムスロット[PTf、(P+Q)Tf]ではアンテナARN/T2が共用アンテナとして動作し、アンテナAR1〜ARN-1が受信アンテナとして動作する
。
【0022】
LNA12は、受信アンテナに対応する処理系統に設けられる。図1の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ19(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ19(#2)の切り替えにより受信アンテナARNに接続される。LNA12は、接続される受信アンテナから受信信号を受け、この受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0023】
ミキサ14は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール17から送られるシステムリファレンス信号と混合させることにより、高周波エコー信号をベースバンド信号に変換する。なお、図1においてはフィルタ等、必ずしも全てのコンポーネントを明示している訳ではない。
【0024】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリング周波数でデジタルベースバンド信号に変換する。以降、このデジタルベースバンド信号を単に復調信号と表記する。このように変換された各復調信号はそれぞれ信号処理部20へ送られる。
【0025】
図3は、被探知目標と受信用センサアレイとの位置関係を示す概念図である。図3では、センサアレイ11が受信アンテナ数N、素子間隔dの等間隔リニアアレイアンテナを形成し、座標原点から距離rm、角度θmの位置に、独立したM個の被探知目標(図3に示すTARGET)が存在する例を示す。角度θmは、図3に示すY軸の正方向を0度に設定し、図
3の時計回りを正方向に設定した場合に示される角度である。また、図3では、被探知目標を1つのみ示しているが、図1の装置によって探知可能な最大の被探知目標の数Mは、各目標が装置に対して略等しい距離を略等しい速度(方向も含めて)で運動している場合、[]をガウス記号として、例えば、[(2N−1)/2]以下の数となる。
【0026】
図3によれば、ベースバンド信号xmT1(t)が角度θmでセンサアレイ11に入射しているイメージが示されている。ここで、ベースバンド信号xmT1(t)とは、アンテナAR1/T1から探知領域に向けて放射されたプローブ信号がm番目の被探知目標で反射されることにより生成されたエコー信号(被探知目標の位置情報等を含む)であって、このエコー信号が上述のような各処理部で復調処理された結果得られるであろう信号を示す。なお、mは1からMまでの整数を示し、tは時間を示す。以降、このベースバンド信号xmT1(
t)を目標エコー信号と表記する。
【0027】
これにより、アンテナAR1/T1から探知領域に向けて放射されたプローブ信号に対応し
て、n番目のアンテナARnで受信され、上述の各処理部で信号処理されることにより得られる復調信号vnT1(t)は、以下の式(1.1)のように表わすことができる。下記式
(1.2)で示されるφn,mT1は、被探知目標の角度が反映された空間位相、即ち、受信
アンテナARnにおける第m波の受信位相を示し、nnT1(t)は、電力σの加法性ガウス
雑音を示す。また、nは、1からN(受信アンテナ数)までの整数である。以降、式(1.1)で示す復調信号vnT1(t)を合成エコー信号と表記する。
【0028】
【数1】
【0029】
このような復調信号vnT1(t)が得られるのは、図2に示すタイムスロット[0、Tf]時である。一方で、図2に示すタイムスロット[Tf、2Tf]においては、以下の式(1.3)で示す合成エコー信号vnT2(t)が得られる。タイムスロット[Tf、2Tf]
では、ARN/T2が共用アンテナとして利用され、AR1からARN-1が受信用アンテナとして
利用される。なお、下記式(1.3)は、次のような考え方に基づいている。つまり、上述したように、基準信号の周期がTfであるから、本レーダ装置1は、2π/Tfを基本周波数として動作する。これにより、アンテナARN/T2から放射されるプローブ信号に対す
る目標エコー信号は、xmT2(t)≒xmT1(t+Tf)と考えることができ、更に、上記
基本周波数に関する考察から、xmT1(t+Tf)≒xmT1(t)と考えることができる。
但し、空間位相φn,mT2は、基準点となる送信アンテナの位置が違うので、空間位相φn,mT1とは異なる。
【0030】
【数2】
【0031】
以上のような各合成エコー信号がそれぞれ信号処理部20へ送られる。
【0032】
信号処理部20は、各合成エコー信号に開口合成処理を施し、開口合成された信号に基づいて、被探知目標の位置情報を推定する。以下、信号処理部20について詳述する。
【0033】
図4は、信号処理部20の構成例を示すブロック図である。図4に示すように、信号処理部20は、信号合成部21、補正データ取得部22、補正処理部23、共分散行列計算部24、核行列計算部25、到来方向推定部26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそ
れぞれ実現される([その他]の項参照)。
【0034】
信号合成部21は、上述のように、本実施形態のレーダ装置1に於ける動作の1周期を通して得られた2N個の各合成エコー信号を開口合成する。信号合成部21は、このとき、合成エコー信号の位相の基準点を統一する操作を施す。ここで、基準点には、2つのタイムスロットの間で等しい空間位相を与えるような送信アンテナと受信アンテナとの組み合わせから得られる各合成エコー信号が利用される。即ち、図2のタイミングチャートにおけるタイムスロット[0、Tf]にアンテナAR1から得られる合成エコー信号v1T1(t)と、タイムスロット[Tf、2Tf]にアンテナARNから得られる合成エコー信号vNT2
(t)とが利用される。
【0035】
信号合成部21は、上記位相の基準点を統一する操作として、補正量dφ(t)(=arg[v1T1(t)]−arg[vNT2(t)])を計算し、この補正量dφ(t)とvnT2(t)とを用いてvnT2(t)*exp(−jdφ(t))を計算し(但し、n=1〜N)、得られた値を改めてvnT2(t)とする。結果、信号合成部21は、以下の式(1.
5)に示す開口合成エコー信号vを生成する。式(1.5)に示すように、合成エコー信号v1T1(t)及びvNT2(t)は空間位相が等しいため足し合わされ、結果として、開口合成エコー信号vの要素数は(2N−1)となる。信号合成部21は、生成された開口合成エコー信号を補正処理部23へ送る。
【0036】
【数3】
【0037】
補正データ取得部22は、上述の開口合成エコー信号を補正するための補正データを取得し、その補正データを補正処理部23へ送る。この補正データは、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数(fl)を用いた補正行列C又は補正ベクト
ルcとして取得される。係数flは、送信アンテナ及び受信アンテナの各種パラメータに
基づいて以下の式(2.1a)、(2.1b)及び(2.1c)のようなアレイ多項式により予め設計され、メモリ等に調整可能な値として保持される。送信アンテナ及び受信アンテナの各種パラメータは、以下の式(2.1c)の合成アレイ多項式f(z)が、素子間隔d及び素子数Lの等間隔リニアアレイアンテナを示すように設計される。また、各種パラメータとしては、送信アンテナ及び受信アンテナに関する素子数、素子間隔、利得特性、位相特性等が利用される。
【0038】
【数4】
【0039】
上記式のηkは、基準素子間隔dに対する送信素子の配置間隔の倍率を表わす係数であ
る。gkは、各送信アンテナの利得特性又は位相特性又はこれらの組み合わせを示す複素
定数である。添え字kは、各送信アンテナを示し、1から送信アンテナ数(K)までの整数である。本実施形態では、添え字kは1及び2である。μnは、基準素子間隔dに対す
る受信素子の配置間隔の倍率を表わす係数である。hnは、各受信アンテナの利得特性又
は位相特性又はこれらの組み合わせを示す複素定数である。添え字nは、各受信アンテナを示し、1から受信アンテナ数(N)までの整数である。本実施形態では、添え字nは、1からNまでの整数である。また、zは、システムリファレンス信号の波長λ、及び、レーダ視野角(FOV(Field Of View))に含まれる任意の角度θに対して、z=exp(
j(2πd/λ)sinθ)で定義される。また、Lは、合成アレイ多項式f(z)において各次数をまとめた際の項数を示す。
【0040】
補正データ取得部22は、各係数(fl)を取得すると、これらを用いて補正行列C又
は補正ベクトルcを取得する。補正行列Cは、以下の式(2.2a)で示し、補正ベクトルcは、以下の式(2.2b)で示す。補正データ取得部22は、このように取得された補正データ(補正ベクトルc又は補正行列C)を補正処理部23へ送る。
【0041】
【数5】
【0042】
補正処理部23は、信号合成部21から送られる開口合成エコー信号に、補正データ取得部22から得られる補正データを適用することにより、開口合成エコー信号を補正する。具体的には、以下の式(2.3a)に示されるように、補正処理部23は、開口合成エコー信号vに補正行列Cを掛け合わせることにより、開口合成エコー信号を補正する(式(2.3a)参照)。補正処理部23は、開口合成エコー信号vと補正ベクトルcとのアダマール積(要素毎の乗算)を取ることにより、開口合成エコー信号を補正するようにし
てもよい(式(2.3b)参照)。以降、補正処理部23により補正された信号を補正エコー信号と表記する。この補正エコー信号は、共分散行列計算部24へ送られる。
【0043】
【数6】
【0044】
共分散行列計算部24は、補正処理部23から送られる補正エコー信号から共分散行列を計算する。なお、本実施形態では、この共分散行列の計算手法を限定するものではないため、ここでは説明を簡略化する。例えば、MUSIC(Multiple Signal Classification)法が利用される場合には、補正エコー信号wと、そのエルミート共役転置wHとの積
から得られる行列に対して前方空間平均(Forward SS)が適用されることで行列RMUSICFSSが得られる。更に、反対角行列Jと補正エコー信号wの複素共役w*との積から得られ
る信号ベクトル(Jw*)と、そのエルミート共役転置(Jw*)Hとの積から得られる行
列に後方空間平均(Backward SS)が適用されることで行列RMUSICBSSが得られる。共分
散行列計算部24は、行列RMUSICFSSと行列RMUSICBSSとを加算して2で除算することで得られる行列を共分散行列RMUSICFBSSとして取得する。また、PRISM(Propagator-method based on an Improved Spatial-smoothing Matrix)法では、補正エコー信号wと、その要素の一部とから一般化Hankel構造を持つ準共分散行列RPRISMが取得され
る。なお、この行列RPRISMは、MUSIC法等で用いられる通常の共分散と同じ情報を
持っているが、行列の構造が違うので、両者を区別する為に本明細書中では準共分散行列と表記する。
【0045】
核行列計算部25は、共分散行列計算部24により取得された共分散行列から角度推定のための行列(以降、核行列と表記する)を計算する。なお、本実施形態では、この核行列の計算手法を限定するものではないため、ここでは説明を簡略化する。上述のようにMUSIC法が利用される場合には、共分散行列RMUSICFBSSを固有値分解することにより
、雑音部分空間を張る固有ベクトルから成る行列EN、信号部分空間を張る固有ベクトル
から成る行列ESがそれぞれ取得され、この行列ENと行列ENの複素共役転置との積が核
行列ΩMUSICとして取得される。
【0046】
また、PRISM法では、準共分散行列RPRISMから部分行列R1及びR2が取得され(
以下の式(2.4a)参照)、部分行列R1及びR2を用いて線形演算子Гが生成される(以下の式(2.4b)参照)。以下の式(2.4b)で示すHは複素共役転置を示す。更
に、線形演算子Гと((2N−1)−2M)次の単位行列I(2N-1)-2Mとを用いて、以下
の式(2.4c)に示すようにプロパゲータ行列Πが生成される。なお、Mはガウス記号[]を用いて[(2N−2)/2]である。更に、線形演算子Г及び部分行列R1及びR2から以下の式(2.4d)のようにスケーリング行列Λが生成される。最終的に、核行列計
算部25は、プロパゲータ行列Π、及び、スケーリング行列Λを用いることにより核行列ΩPRISMを式(2.4e)により計算する。
【0047】
【数7】
【0048】
なお、共分散行列計算部24及び核行列計算部25で利用され得るMUSIC法、PRISM法等は周知の手法であり、その他周知の手法が利用されるようにしてもよい。MUSIC法としては、参照文献(IEEE Trans. Antennas Propagation, Vol. 34, (Mar. 1986), pp.276-280)を援用する。また、PRISM法としては、参照文献(IEEE Trans. Intelligent Transportation Systems, Vol. 9, No. 3, (Sept. 2008), pp. 451-461)又は参照文献(国際公開第2006/67869号;特願2006−548672)を援用する。
【0049】
到来方向推定部26は、核行列計算部25により算出された核行列を用いることにより角度推定を行う。本実施形態では到来方向推定部26で利用される角度推定手法を限定しない。この角度推定手法は周知の技術が利用されればよい。例えば、核行列計算部25により算出された核行列を用いることで角度スペクトラムが算出される(以下の式(2.5a)又は式(2.5b)参照)。そして、この角度スペクトラムでモードベクトルa(θ)(式(2.5c)参照)のパラメータθを走査することにより(但し、簡単の為,核行列の次元をS×Sとした)、P(θ)がピークを示すθの値から被探知目標の角度θm(
m=1〜M)が推定される。
【0050】
【数8】
【0051】
その他の手法として、到来方向推定部26は、核行列計算部25により算出された核行列Ωを用いた以下の式(2.6a)で定義される代数方程式を解くことにより、角度推定
を行うようにしてもよい。なお、行列Ωが(S×S)次の行列とした場合に、式(2.6a)のベクトルa(z)は以下の式(2.6c)で定義される。この場合には、例えば、m番目の解として、以下の式(2.6b)のような値が得られ、この値|zm|が1に近
似する場合に、到来方向推定部26は、θm=arcsin[(λ/(2πd))arg
(zm)]を用いて角度を推定するようにしても良い。
【0052】
【数9】
【0053】
[実施形態における作用及び効果]
以下、上述の実施形態におけるレーダ装置1の作用及び効果について説明する。
【0054】
本実施形態におけるレーダ装置1では、図2に示すタイミングチャートに応じて送信アンテナAT1及びAT2から放射されたプローブ信号が、m個の被探知目標で反射されることにより各エコー信号がそれぞれ生成され、受信アンテナAR1〜ARNにそれぞれ入射される。レーダ装置1では、LNA12、ミキサ14、A/D変換器15等が動作することにより、各エコー信号から、1周期動作(図2の例によるタイムスロット[0、Tf]及び[
Tf、2Tf])で2N個の各合成エコー信号がそれぞれ取得される。
【0055】
このように取得された2N個の各合成エコー信号が、図4に示す信号合成部21により開口合成される。この開口合成により得られた開口合成エコー信号は上記式(1.5)で示すことができる。このとき、目標エコー信号ベクトルx及び雑音信号ベクトルnを以下の式(3.1)及び式(3.2)のように定義し、更に、角度行列Aを式(3.3)及び(3.4)で定義した場合、開口合成エコー信号に関し、以下の式(3.5)のようなアレイ信号処理の基本関係式を導くことができる。これにより、式(3.3)で示すような角度行列Aを用いることにより、本実施形態におけるレーダ装置1が(2N−1)個の受信アンテナで構成された等間隔リニアアレイアンテナを備えたレーダ装置として機能することが分かる。
【0056】
【数10】
【0057】
ところで、上記式(3.3)にはモードベクトルa(θ)の要素が2となっている箇所が存在する。これは、以下の式(4.3)で示すような開口合成後のアレイ多項式の係数に2が現れることからも証明される。開口合成後のアレイ多項式f(z)は、式(4.1)に示す送信アンテナのアレイ多項式gTX(z)と、式(4.2)に示す受信アンテナのアレイ多項式hRX(z)との積として表わされる。但し、z=exp(j(2πd/λ)sinθ)である。
【0058】
【数11】
【0059】
上述のように開口合成後のアレイ多項式f(z)において係数が2となっている項は、開口合成後の等間隔リニアアレイのN番目のアンテナでデータ測定を2回行っていることを意味する。これにより、上記式(1.5)を以下の式(4.4)として上記式(3.3)を以下の式(4.5)としたとしても、上記式(3.5)と同じアレイ信号処理の基本関係式が成立する。
【0060】
【数12】
【0061】
この様な考え方に基づいて、本実施形態におけるレーダ装置1では、信号合成部21により得られた開口合成エコー信号が、補正データ取得部22により取得された補正データを利用することにより補正処理部23で補正される。補正データは、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数(fl)をキャンセルするように設定された
補正行列又は補正ベクトルとして取得される。
【0062】
本実施形態では、このように、等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数がキャンセルされた開口合成エコー信号を利用して、共分散行列を計算し(共分散行列計算部24)、この共分散行列から核行列が取得される(核行列計算部25)。結果、このように取得された核行列から、到来方向推定部26により角度推定が行われる。
【0063】
図5は、ガウス平面において本実施形態における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図である。図5は、送信アンテナ数が2であり受信アンテナ数Nが4の場合を例示している。本実施形態では、合成アレイ多項式の零点(図5に示す黒色の点)が円周上に等しい間隔で並んでいる。更に、パラメータθの値に従ってガウス平面上を連動して動き回り、角度スペクトラム走査を行う際に用いられるモードベクトル(上記式(2.5b)参照)の零点(図5に示すドット柄の点)が合成アレイ多項式の零点と複数箇所で一致している。これは、合成アレイ多項式とモードベクトルとの位相的な不整合がないことを示す。
【0064】
ところで、本実施形態のレーダ装置1とは異なり、補正データ取得部22及び補正処理部23によって本実施形態のような開口合成エコー信号の補正を行うことなく角度推定を行うレーダ装置が存在する。以降、このようなレーダ装置を比較対象レーダ装置と表記し、この比較対象レーダ装置における角度推定処理について説明する。
【0065】
比較対象レーダ装置における角度推定処理で利用される信号ベクトルは、受信アンテナ数Nを3(2N−1=5)とすると、例えば、以下の式(5.1)で与えられる。比較対象レーダ装置では、下記式(5.1)のように補正されない状態の開口合成エコー信号が利用される。
【0066】
ここで、測角アルゴリズムとしてMUSIC法が適用される場合、式(5.1)の信号ベクトルが用いられることにより下記式(5.2)のような共分散行列RMUSICが生成さ
れ、その共分散行列RMUSICに対して前方空間平均を適用して下記式(5.3)のような
共分散行列RMUSICFSSが得られる。また、反対角行列Jとvの複素共役との積Jv*に対
して共分散行列が取得され、この共分散行列に後方空間平均を適用した行列RMUSICBSSが更に取得され、角度推定に用いる共分散行列として以下の式(5.4)の行列RMUSICFBS
Sが得られる。このように得られた共分散行列RMUSICFBSSを以下の式(5.4)に示すように固有値分解して雑音部分空間を張る固有ベクトルから成る行列EN、信号部分空間を
張る固有ベクトルから成る行列ESがそれぞれ取得され、この行列ENと行列ENの複素共
役転置との積が核行列ΩMUSICとして取得される(式(5.5)参照)。結果、このよう
な核行列ΩMUSICが利用されることにより角度推定が行われる。
【0067】
【数13】
【0068】
一方で、測角アルゴリズムとしてPRISM法が適用される場合、式(5.1)の信号ベクトルが用いられることにより下記式(5.6)のような準共分散行列RPRISMが生成
される。この準共分散行列RPRISMが利用されることにより、上記式(2.4b)、式(
2.4c)、式(2.4d)及び式(2.4e)により核行列ΩPRISMが生成される。結
果、このような核行列ΩPRISMが利用されることにより角度推定が行われる。
【0069】
【数14】
【0070】
このように、比較対象レーダ装置で利用される各共分散行列には、何れの測角アルゴリズムが適用された場合でも、係数が掛かった要素が含まれる。共分散行列の要素に係数が掛かっていると、例えば、行列を固有値分解した際の固有値が本来のそれとは異なった値
となる。これにより、固有ベクトルが変化することにより、角度推定の精度の劣化を引き起こす。
【0071】
図6は、ガウス平面において比較対象レーダ装置における合成アレイ多項式の零点とモードベクトルの零点との位置関係を示す図である。図6は、図5と同様に、送信アンテナ数が2であり受信アンテナ数Nが4の場合を例示している。図6に示すように、比較対象レーダ装置における開口合成後のアレイ多項式は、上記式(4.3)に示すように、円周等分多項式とは異るため、零点の間隔が異なっており、更に重根(図6に示す“2”を付した黒色の点)まで発現している。これは、合成アレイ多項式とモードベクトルとの位相的な不整合が存在することを示しており、モードベクトルで走査したとしても、近接した零点や重根の影響を受け、角度スペクトラムのダイナミックレンジが劣化する等の現象が発生することを示す。
【0072】
図7は、角度推定精度を示すグラフである。図7は、送信アンテナ数Kが2で受信アンテナ数Nが4であり基準アンテナ間隔dが1.8λである開口合成アレイアンテナを備える比較対象レーダ装置及び本実施形態におけるレーダ装置1における角度推定精度をそれぞれ示している。他の条件としては、キャリア周波数が76ギガヘルツ(GHz)、片側変調帯域が50メガヘルツ(MHz)、変調周期が4ミリ秒(msec)であるFMCWが採用され、以下に示す目標諸元(距離、速度及び角度)をそれぞれ持つ2つの被探知目標T1及びT2が設定されている。また、SNRは20デシベル(dB)に設定されている。
【0073】
T1:40メートル(m)、0キロ毎時(km/h)、0度
T2:40(m)、0(km/h)、3度
図7における右下以外の3つのグラフでは、測角アルゴリズムの各々について、角度(X軸)及び距離(Y軸)から構成される平面上に角度スペクトラムレベルがZ軸の色彩によって表わされる。FFT−DBFと表記されたグラフは、上記比較対象レーダ装置において測角アルゴリズムとしてデジタルビームフォーマ(フーリエ変換を用いたDBF(Digital-Beam-Former))法が適用された場合の結果を示す。mPRISMと表記されたグ
ラフは、上記比較対象レーダ装置において測角アルゴリズムとして参照文献(特願2009−201624)により援用される改良PRISM法が適用された場合の結果を示す。一方で、mPRISM+と表記されたグラフは、本実施形態のレーダ装置1において測角アルゴリズムとして参照文献(特願2009−201624)により援用される改良PRISM法が適用された場合の結果を示す。また、右下のグラフは、上記3つの環境を含む4つの環境において、被探知目標の存在する距離における角度スペクトラムのレベルを示す。
【0074】
図7の右下のグラフに示すように、比較対象レーダ装置における角度推定では推定精度に2度程度の誤差が生じているのに対して、本実施形態におけるレーダ装置1における角度推定では、1度程度の誤差に改善されている。即ち、本実施形態におけるレーダ装置1における角度推定では、比較対象レーダ装置における角度推定に比較して、角度推定精度が改善されている。更に、図7の各グラフに示されるように、本実施形態におけるレーダ装置1における角度推定では、2つの被探知目標が明確に区別できるのに対して、比較対象レーダ装置における角度推定では明瞭さが欠けてしまっている。即ち、被探知目標間の識別を容易にするためのスペクトラムのダイナミックレンジについても本実施形態におけるレーダ装置1における角度推定では、比較対象レーダ装置における角度推定に比較して改善されている。
【0075】
このように、本実施形態におけるレーダ装置1によれば、開口合成エコー信号を等間隔アレイとなる合成アレイ多項式の各次数に対応する各係数により補正することにより、角度推定精度が向上し、角度スペクトラムのダイナミックレンジを改善することができる。
従って、本実施形態におけるレーダ装置1によれば、正確に被探知目標の角度及び距離を推定することができる。
【0076】
[変形例]
上述の実施形態では、メモリ等に調整可能な値として予め保持されている係数flが開
口合成エコー信号を補正するために利用されていた。しかしながら、本実施形態はこのような構成に限定するものではなく、当該係数flが各合成エコー信号の電力レベルに基づ
いて更新されるようにしてもよい。
【0077】
図8は、変形例におけるレーダ装置の構成例を示すブロック図である。変形例におけるレーダ装置は、上述の実施形態における構成に加えて、各A/D変換器15から得られる各合成エコー信号の電力レベルを測定する電力測定部30を更に有する。電力測定部30は、各合成エコー信号の電力レベルを測定し、全合成エコー信号の電力レベルの合計値に対する各合成エコー信号の電力レベルの割合をそれぞれ算出する。なお、電力測定部30による電力レベルの測定は、フーリエ変換、自乗検波器等のような周知の技術が適用されることにより行われればよいため、ここでは説明を省略する。
【0078】
本変形例では、補正データ取得部22が、電力測定部30により算出された各割合値を取得し、この取得された各割合値を予めメモリ等に保持されている合成多項式の各項の係数flに掛け合わせることにより最新の係数flを決定する。このとき、合成多項式の各項のうち、各開口合成エコー信号に対応する項の係数にその開口合成エコー信号に対応する割合値が掛け合わされる。補正データ取得部22は、そのように決定された最新の係数flを用いて補正ベクトル又は補正行列を取得する。
【0079】
これにより、開口合成エコー信号を補正するために利用される係数が各エコー信号の受信状況に応じてリアルタイムに更新されるため、より精度の高い角度推定を行うことが可能となる。
【0080】
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0081】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0082】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【符号の説明】
【0083】
1 レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(HPA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16 CPU(Central Processing Unit)
17 発振モジュール
18 スイッチコントローラ
20 信号処理部
21 信号合成部
22 補正データ取得部
23 補正処理部
24 共分散行列計算部
25 核行列計算部
26 到来方向推定部
30 電力測定部
【特許請求の範囲】
【請求項1】
目標を探知するためのレーダ装置において、
送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成され、該各送信アンテナから所定タイミングで放射された各プローブ信号が前記目標で反射されて生じた各エコー信号を該複数の受信アンテナで受信するアレイアンテナと、
前記複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、
前記複数の送信アンテナのアレイ多項式と前記複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、
前記補正データを用いて前記合成ベースバンド信号ベクトルを補正する補正部と、
前記補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記補正データ取得部は、前記合成アレイ多項式の各項の係数の逆数をそれぞれ要素に含む補正行列又は補正ベクトルを前記補正データとして取得し、
前記補正部は、前記合成ベースバンド信号ベクトルに前記補正行列を掛け合わせるか、又は、前記合成ベースバンド信号ベクトルと前記補正ベクトルとのアダマール積を取ることにより、前記合成ベースバンド信号ベクトルを補正することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記受信された各エコー信号の電力レベルを測定する測定部を更に備え、
前記補正データ取得部は、前記測定部で測定された各エコー信号の電力レベルを用いて前記合成アレイ多項式の各項の係数をそれぞれ更新する、
ことを特徴とする請求項1又は2に記載のレーダ装置。
【請求項4】
送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成されるアレイアンテナを備える装置で実行される目標探知方法であって、
各送信アンテナから所定タイミングで放射された各プローブ信号が目標で反射されることにより生じたエコー信号を複数の受信アンテナにより受信するステップと、
前記複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成するステップと、
前記複数の送信アンテナのアレイ多項式と前記複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得するステップと、
前記補正データを用いて前記合成ベースバンド信号ベクトルを補正するステップと、
前記補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行うステップと、
を含むことを特徴とする目標探知方法。
【請求項1】
目標を探知するためのレーダ装置において、
送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成され、該各送信アンテナから所定タイミングで放射された各プローブ信号が前記目標で反射されて生じた各エコー信号を該複数の受信アンテナで受信するアレイアンテナと、
前記複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、
前記複数の送信アンテナのアレイ多項式と前記複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、
前記補正データを用いて前記合成ベースバンド信号ベクトルを補正する補正部と、
前記補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記補正データ取得部は、前記合成アレイ多項式の各項の係数の逆数をそれぞれ要素に含む補正行列又は補正ベクトルを前記補正データとして取得し、
前記補正部は、前記合成ベースバンド信号ベクトルに前記補正行列を掛け合わせるか、又は、前記合成ベースバンド信号ベクトルと前記補正ベクトルとのアダマール積を取ることにより、前記合成ベースバンド信号ベクトルを補正することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
前記受信された各エコー信号の電力レベルを測定する測定部を更に備え、
前記補正データ取得部は、前記測定部で測定された各エコー信号の電力レベルを用いて前記合成アレイ多項式の各項の係数をそれぞれ更新する、
ことを特徴とする請求項1又は2に記載のレーダ装置。
【請求項4】
送信アンテナ及び受信アンテナの少なくとも一方として用いられる複数のアンテナ素子から形成されるアレイアンテナを備える装置で実行される目標探知方法であって、
各送信アンテナから所定タイミングで放射された各プローブ信号が目標で反射されることにより生じたエコー信号を複数の受信アンテナにより受信するステップと、
前記複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成するステップと、
前記複数の送信アンテナのアレイ多項式と前記複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得するステップと、
前記補正データを用いて前記合成ベースバンド信号ベクトルを補正するステップと、
前記補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行うステップと、
を含むことを特徴とする目標探知方法。
【図1】

【図2】

【図3】
【図4】

【図5】
【図6】
【図7】

【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−237257(P2011−237257A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−108374(P2010−108374)
【出願日】平成22年5月10日(2010.5.10)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月10日(2010.5.10)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]