
レーダ装置及び目標探知方法
【課題】被探知目標を適正に探知する開口合成を可能とする。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
【解決手段】目標を探知するレーダ装置において、空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、決定された位相補正量を用いて、2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置、例えば、車載用レーダ(以降、探知測距装置の具体例としてレーダ装置を取り上げる)等には、複数の送信用センサ素子から構成される送信用センサアレイと、複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせ、実効的に受信用のセンサアレイの開口を拡大する技術を採用する事で、性能を犠牲にせずに小型化を実現した装置がある。このような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成等と呼ばれる。開口合成を用いたレーダ装置は、複数の送信センサ素子から(時分割多重、周波数分割多重、或いは、符号分割多重の何れかの方式、又は、その組み合わせで)プローブ信号を放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、各受信センサ素子で受信された信号を合成することにより実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−155171号公報
【特許文献2】特開2006−98181号公報
【特許文献3】特開2007−155381号公報
【特許文献4】特開平11−231040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の開口合成レーダでは、或る特定の条件下においては、被探知目標を正確に探知できないという問題があった。この様な条件としては、例えば、複数の物体がレーダから殆ど同じ視線方向相対距離(以下、単に距離と記す)に存在し、それぞれが殆ど同じ視線方向相対速度(以下、単に速度と記す)で運動している様なケースがある。この様なケースを具体的に考えるならば、渋滞状況等(複数の物体が、近接した位置を小さな速度差で動いている)、日常的に頻発するシーンでも正確に目標を探知できなくなる可能性がある。車載用レーダとしての開口合成レーダはこのような問題点を抱えている。
【0005】
本発明の一態様の目的は、被探知目標を適正に探知する開口合成を可能とすることにある。
【課題を解決するための手段】
【0006】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0007】
すなわち、第1の態様は、目標を探知するレーダ装置において、
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、
各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、
前記包絡線検波部により取得された各基準パスの受信信号の包絡線間について定義される積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、
前記決定部で決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部と、
を含む。
【0008】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0009】
上記態様によれば、被探知目標を適正に探知する開口合成が可能となる。
【図面の簡単な説明】
【0010】
【図1】比較例に係るレーダ装置の構成例を示す図。
【図2】図1のレーダ装置で利用されるタイミングチャート。
【図3】開口合成の成立条件を示す概念図。以下、AR1/T1、ARN/T2を送受共用素子として動作させるタイムスロット(図2のタイミングチャートに従った場合、観測時間:[0、Tf]、[Tf、2Tf])を、それぞれFM1、FM2、或いは、測定時間A、Bと記す。
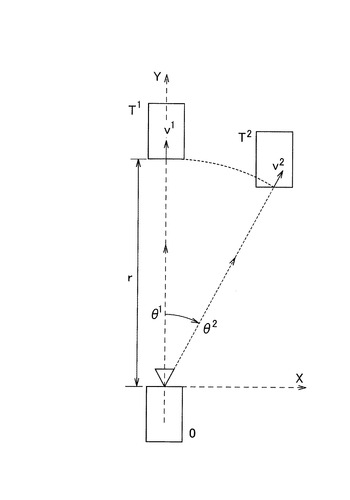
【図4】シーン設定例を示す図。
【図5】図1のレーダ装置を用いて測角を実施した結果を示すグラフ。
【図6】図5で利用した周波数ドメインの信号を時間ドメイン信号に変換し、測角を実施した結果を示すグラフ。
【図7】図6の時間ドメインの信号に対し、時間ドメインで位相差をキャンセルした場合の測角結果を示すグラフ。
【図8】比較例のレーダ装置によって取得される基準パスのエコー信号とその包絡線を示すグラフ。
【図9】第1実施形態に係るレーダ装置の構成を示すブロック図。
【図10】図9に示したレーダ装置の動作を示すタイムチャート。
【図11】図9に示したレーダ装置によって取得される基準パスのエコー信号とその包絡線を示すグラフ。
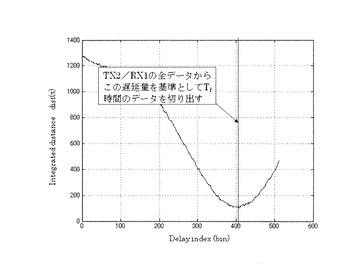
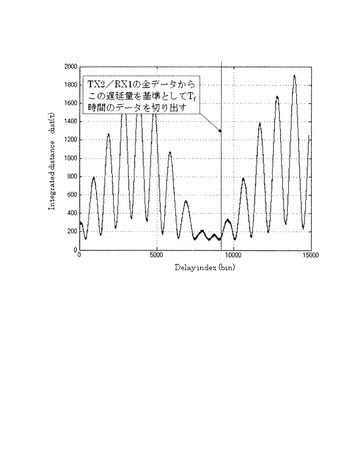
【図12】図11に示した包絡線の位相が一致するタイムラグを積分距離から求めた例を示すグラフ。
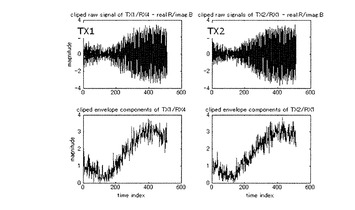
【図13】図12に示したタイムラグに基づいて切り出した包絡線の位相が揃ったデータを示す。
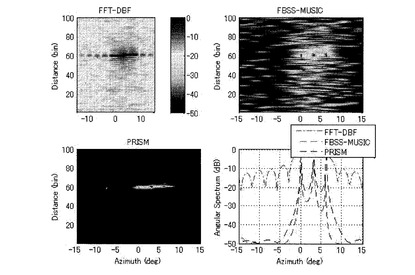
【図14】位相補正を施して信号の開口合成を成立させた後、FFTを行い、周波数ドメインで測角を実施した例を示す。
【図15】図9に示したレーダ装置によって取得される基準パスのエコー信号とその包絡線の別の例を示すグラフ。
【図16】図15に示した包絡線の位相が一致するタイムラグを積分距離から求めた例を示すグラフ。
【図17】図16に示したタイムラグに基づいて切り出した包絡線の位相が揃ったデータを示す。
【図18】位相補正を施して信号の開口合成を成立させた後、FFTを行い、周波数ドメインで測角を実施した例を示す。
【図19】合成包絡線に対する位相補正を説明する図。
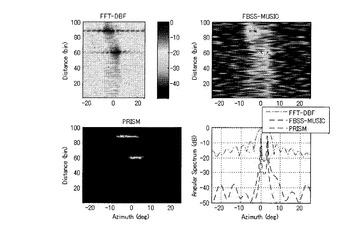
【図20】複数の距離に相対速度の近似した複数の目標が存在する場合における測定結果を示す図。
【図21】第2実施形態におけるレーダ装置の構成例を示す図。
【図22】第3実施形態におけるレーダ装置の構成例を示す図。
【図23】第4実施形態におけるレーダ装置の構成例を示す図。
【図24】第4実施形態におけるタイミングチャート。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態に係る探知測距装置について説明する。以下の実施形態における構成は例示であり、本発明は実施形態の構成に限定されない。
【0012】
<比較例>
本発明の実施形態を説明する前に、比較例について説明する。センサアレイによる目標の角度検知機能を持つ探知測距装置は、基本的にセンサの物理開口によって解像度が決定される。このため、例えば寸法制限の厳しい車載用レーダに適用される探知測距装置では、複数の送信用センサと複数の受信用センサとを組み合わせて、実効的な開口を拡大するホログラフィック開口合成方式(以下、単にホログラフ、若しくは開口合成と呼ぶ)が採用されている。
【0013】
以下、比較例の説明を行うにあたって、探知測距装置の具体例として変調方式にFMCW(Frequency Modulated Continuous Wave)を採用したレーダ装置を考える(従って、セン
サはアンテナとなる)。
【0014】
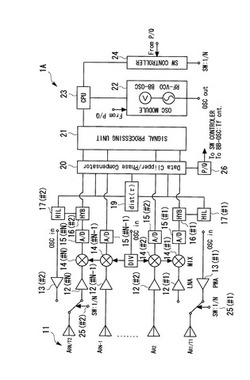
図1は、比較例に係る探知測距装置(開口合成レーダ装置)の回路ブロック例である。図1において、共用アンテナ(送受信アンテナ)AR1/T1及びARN/T2は、直交座標のX軸に沿って配置されている。受信(RX)用のアレーアンテナ(受信アンテナ)は、原点からX軸の正方向に向かって間隔dで配置されたN個のエレメントアンテナAR1〜ARNからなる。送信(TX)用のアレーアンテナ(送信アンテナ)は、受信用のアレーアンテナの最外縁に配置された2個(U=2)のアンテナAT1及びAT2からなる。
【0015】
レーダ装置1は、オシレータ(OSC)モジュール(発振モジュール)22を備えており、OSCモジュール22は、高周波電圧制御発振器(RF−VCO(Radio Frequency- Voltage Control Oscillator))と、ベースバンド発振器(BB−OSC(Base Band Oscillator))とを備えている。RF−VCOは、BB−OSCから入力される変調入力信号によって、FM変調(周波数変調)を受けた信号をシステムリファレンス信号として出力する。
【0016】
OSCモジュール22からのシステムリファレンス信号は、アンテナAT1及びAT2から目標探知用のプローブ信号として出力される一方で、アンテナAR1〜ARNで受信された目標からのエコー信号を復調する為に用いられる。
【0017】
図2は、図1に示した探知測距装置1のタイミングチャートである。即ち、レーダ装置1は、2つの共用アンテナAR1/T1及びARN/T2を送信に使用する。このため、測定時間[0、Tf]では、共用アンテナAR1/T1を送受信(TX/RX)アンテナとして、受信アンテナAR2〜ARN-1及び共用アンテナARN/T2を受信(RX)アンテナとして用い、測定時
間[Tf、2Tf]では、共用アンテナARN/T2をTX/RXアンテナとして用いるととも
に、共用アンテナAR1/T1及び受信アンテナAR2〜ARN-1をRXアンテナとして用いる。
なお、Tfは変調入力信号の周期である。
【0018】
ここで、各時間区間に於けるプローブ信号、すなわち、送信アンテナAT1及びAT2から放射されるプローブ信号をvTX1(t)、vTX2(t)とおくと、各プローブ信号vTX1(t)、vTX2(t)は周期Tfの信号となるので、それぞれ以下の式(1.1a)及び(1.1b)
で表される。また、vTX2(t)のΔφは送信時間差による位相ズレを示す。
【0019】
【数1】

但し、ωcはRF−OSCのキャリア角周波数(以下の説明では、角周波数と周波数と
は区別しない)であり、h(t)は変調入力信号f(x)に対して、以下の式(1.2)で
定義される。
【0020】
【数2】
簡単の為、変調入力信号f(x)の時間の原点を半周期ズラすと、f(x)は以下の式(
1.3)で表される。なお、式(1.3)中のΔωは片側変調帯域幅である。
【0021】
【数3】
ここで、双方のTXアンテナAT1,AT2からプローブ信号を交互に送信中、M個の被探知目標がレーダ装置1に対して視線方向相対距離rm(m)、角度θm(deg)の位置を視線方向相対速度vm(km/h)で運動し続けると仮定する(但し角度は時不変とする)。このとき、各RXアンテナで受信されるエコー信号(受信信号)vTX1RX,n(t)、及びvTX2RX,n
(t)は、式(1.5)、(1.6a)、(1.6b)の定義を用いて、以下の式(1.
4a)及び(1.4b)で表すことができる(n=1〜N、m=1〜M)。
【0022】
受信信号vTX1RX,n(t)は、測定時間[0、Tf]に於いて、送信アンテナAT1から放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。受信信号vTX2RX,n(t)は、測定時間[Tf、2Tf]に於いて、送信アンテナAT2から
放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。なお、nTX1/2n(t)は加法性ガウス雑音であり、また冗長性を避ける為、以下の説明
で“視線方向”という語は省略する。
【0023】
【数4】
これらのエコー信号(受信信号)は、低雑音増幅器(以降、LNAと表記する)12(12#1〜#N)で増幅され、ミキサ14(14#1〜#N)でOSCモジュール22からのシステムリファレンス信号とミキシングしてベースバンド信号に変換される。
【0024】
ベースバンド信号は、増幅やフィルタリングのような適切なインタフェース(IF)処理が施された後、アナログ/ディジタル変換器(A/D)15(15#1〜#N)において、例えば、サンプリング周波数ωs=ωf*K(但し、ωf=2π/Tf、Kはサンプル数)で
ディジタル信号に変換される。その後、ディジタル信号に変換されたベースバンド信号(ディジタルベースバンド信号(復調信号))は、信号処理部(Signal Processing Unit)21において、各種の信号処理が施され、所望の目標諸元として、被探知目標の距離、速度、及び角度が推定される。
【0025】
ここで、各受信アンテナでの受信信号から得られる各復調信号vTX1RX,n(t)、vTX2RX,n(t)は、復調等に伴う位相誤差を各プローブ信号に起因する量としてまとめてΔψTX1(t)及びΔψTX2(t)で示すと、以下の式(1.7a)及び(1.7b)のように示される。以降、各信号の表記で、例えば、[0、Tf]なる時間区間を動く時間変数tは、δt=Tf/Kで離散化された時間[0,δt,2δt,…,(K-1)δt]を動くと仮定する。
【0026】
【数5】
実際に市場に存在するレーダ装置の諸元に基づいて、上記した式(1.7a)及び(1.7b)から誤差及び空間位相を除いた状態で、FMのダウンチャープによる位相項を取り出して整理すると、以下の式(1.8)が得られる。なお、参考とした装置諸元は、探知距離範囲(最小及び最大探知距離)が1〜200[m]、探知速度範囲が1〜200[k
m/h]、Δωが約50MHz、基準信号(RF−VCOへの変調入力信号)の周期Tfが
1[msec]程度である。
【0027】
【数6】
式(1.8)を参照し、距離遅延による周波数成分(アップチャープの場合は符号が異なる)である−4Δωτm0/TfをωBmとおき、定数項ωcτm0+Δωτm0をΔψTX1(t)
、ΔψTX2(t)に含めると、以下の式(1.9a)及び(1.9b)が得られる。
【0028】
【数7】
図3は、図2のタイミングチャートに沿って装置を動作させた場合を例に採って、開口合成が成立する条件を示した概念図である。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間Aとも
表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、2Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している。図3から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0029】
換言すれば、2つの測定時間帯[0、Tf]及び[Tf、2Tf]で取得された各復調信
号vTX1RX,n(t)、vTX2RX,n(t)に対して開口合成が成立する条件は、合成時の位相基準を与える送受信アンテナの組合せ(基準パス)における各復調信号vTX1RX,N(t)、vTX2RX,1(t)の位相長が双方の測定時間で一致することである。
【0030】
なお、装置構成や変調方式、或いはタイミングチャートの選択によっては、位相長が等しくなる送受信アンテナの組み合わせは複数存在するケースもあり得る。しかしながら、レーダ装置1では合成後のアンテナ開口が最大となり、且つ、位相長が等しくなる送受信アンテナの組合せは、送信アンテナAT1と受信アンテナARNとのペアと、送信アンテナAT2とAR1とのペアとである。このため、これらの組合せを基準パスの具体例として説明する。また、以降の説明においては、送受信アンテナを識別する際には、例えば、“AT1”を“TX1”、“AR1”を“RX1”と略記することもある。
【0031】
開口合成を行う際には、式(1.9a)及び式(1.9b)における、位相誤差ΔψTX1(t)、ΔψTX2(t)の扱いが問題となる。レーダ装置1における開口合成手法では、最初に、各測定時間に得られたエコー信号に高速フーリエ変換(FFT(Fast Fourier Transformation))を施し、エコー信号を周波数ドメインのデータに変換する。
【0032】
vTX1RX,N(t)を例に取って具体的に示すと、周波数インデックスがk(k=−K/2
+1〜K/2)番目の要素は、以下の式(1.10)で与えられる。このため、m番目の目標に対するFFT結果は、空間位相を除いて式(1.11a)で表される。但し、式(1.11a)の左辺は、下記式(1.11b)のように定義した場合には、式(1.11c)等により得られる。なお、一般性を失わずg0TX1=1とおいて良い。
【0033】
【数8】
以上の考察を踏まえると、上記式(1.9a)及び(1.9b)に示した時間ドメインの信号から変換された周波数ドメイン信号は、以下の式(1.12a)及び(1.12b)のように表わすことができる。
【0034】
【数9】
続いて、信号処理部21は、基準組み合わせに対応する各復調信号を用いて、各周波数インデックスkにおける位相誤差dψ(k)を、下記の式(1.13)を用いて取得する(ここで、基準組み合わせに対して空間位相が等しくなる事に注意)。
【0035】
最後に、信号処理部21では、位相誤差dψ(k)に基づく補正量exp[−jdψ(k)]をVTX2RX,n(k)の全てのn及びkについて掛けることにより、VTX2RX,n(k)の位相誤差をVTX1RX,n(k)の位相誤差ΔψTX1(t)と合わせ、結果、開口合成を成立させていた。即ち、図7のレーダ装置の信号処理部21によって得られる開口合成信号は、下記式(1.14a)及び(1.14b)で示される(簡単の為、加法性雑音成分の影響は省略している)。
【0036】
【数10】
上記式(1.14a)及び(1.14b)のような各信号から被探知目標の角度を推定するためには、基準受信アンテナの各信号の空間位相が等しいことに基づいて、開口合成を実施した後の基準受信アンテナの信号を以下の式(1.15)によって定義する。更に、先に定義した基準受信アンテナの信号と、他の各受信アンテナによって受信された信号とを要素とするベクトルV(k)、雑音信号ベクトルN(k)、角度行列A、及び、目標信号ベクトルX(k)を、以下の式(1.16a)、(1.16b)、(1.16c)、及び、(1.16d)で定義することによって、開口合成された信号に対し、式(1.17)のようなアレー信号処理の基本関係式を導く(言うまでも無いが、各式は周波数インデックスがkである信号要素に関する表記である)。
【0037】
【数11】
図1に示す信号処理部21は、DBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、或いはPRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法のような、既知の角度推定法(測角アルゴリズム)を用いて処理する。
【0038】
上述した比較例では、2個のアンテナを2つの測定時間帯でそれぞれ送信アンテナとして動作させ、N組の受信アンテナで被探知目標からのエコー信号を受信し、これらを空間位相が同じになる基準パスの位相長が等しいと考えて合成する。これによって、2N−1個のアンテナ素子からなる受信アレーアンテナを備えるレーダ装置(探知測距装置)を用
いて同時に信号を受信した様に機能させる(換言すれば、実効開口を拡大する)ことを可能とする。
【0039】
しかしながら、測定位置から同一距離を隔てて複数の被探知対象が存在し、各被探知目標が微少な速度差で運動しているシーン(例えば、レーダ装置を搭載した車両が渋滞に巻き込まれている状態)では、開口合成が上手く機能しない事があった。
【0040】
図4は、シーン設定例を示す図である。以下、図4で示されるシーン設定を用いて、図1で示すレーダ装置の問題点を数式で検証する。図4のシーン設定では、2台の被探知目標T1、T2が、図1のレーダ装置Oから同距離(r1=r2=r)で角度θ1及びθ2の位置に存在し、それぞれ速度v1及びv2で運動している。
【0041】
ここで、計算例で用いたレーダ装置の諸元について記しておくと、発振モジュール22から出力されるシステムリファレンス信号は、キャリア周波数が76ギガヘルツ[GHz](=ωC/2π)、RF−VCOへの変調入力信号(基準信号)の基本周期Tfが4[ms
ec]、片側変調帯域が50[MHz](=Δω/2π)のFMCW信号である。また、ア
ンテナ素子数Nが4、アンテナ素子間隔dが1.8λ(λはキャリア信号の波長)、サンプル数Kが512であるとした。更に、図4のシーン設定における各被探知目標の諸元(距離、角度、速度)をT1:(40[m]、0[deg]、10[km/h])、T2:(40[
m]、3(deg)、11(km/h))と、SNRを30[dB]と仮定した。なお、目
標諸元については、計算例毎に若干変更する事がある。
【0042】
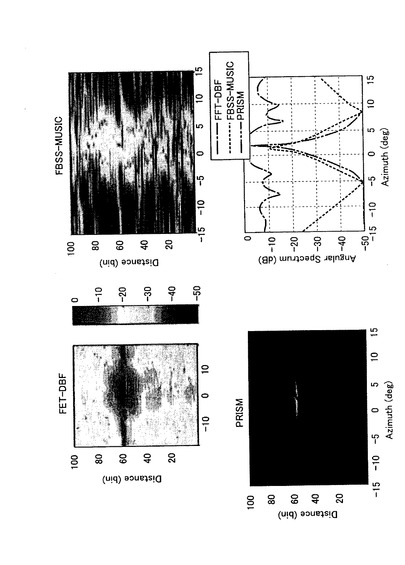
このような各諸元を用いて、比較例に係るレーダ装置1において、先述の手順に従って開口合成操作を行い、周波数ドメインでの測角を行ったところ図5のような結果となった。図5は、比較例に係るレーダ装置1(図1)における測角結果を示すグラフである。図5に示す結果によれば、被探知目標の距離は概ね正確に推定できているものの、0度及び3度にそれぞれ1つずつ存在する被探知目標が1.5度付近に存在する1つの被探知目標として誤推定されている。
【0043】
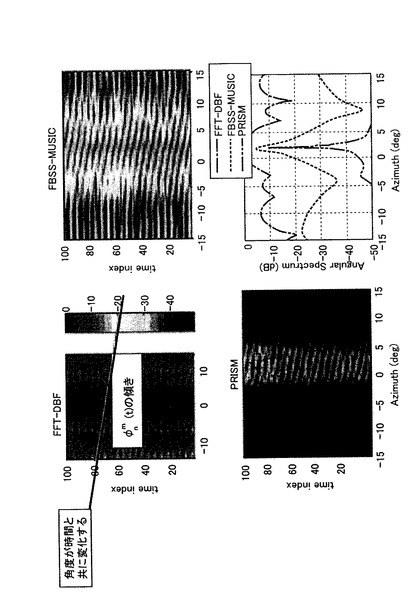
そこで、このような誤推定の原因を特定するために、上記の合成信号(式(1.17))に逆フーリエ変換を施すことにより当該合成信号を時間ドメインの信号に再変換した後に、この再変換された時間ドメインの信号に測角アルゴリズムを適用した。図6は、図5で利用した周波数ドメインの信号から変換された、時間ドメインの信号に対する測角結果を示すグラフである。DBF、MUSIC及びPRISMの測角結果を示すグラフ(左上グラフ、右上グラフ、左下グラフ)によれば、本来、時間的に不変であるはずの目標角度(図では空間位相φTX1/2,mn(t)の傾きと記している)が時間に応じて変化している。
【0044】
この例では、2つの被探知目標の相対速度差は1[km/h](≒0.28[m/sec])であるから、Tf(=4[msec])時間毎にこの速度差によって生じる被探知目標間
の距離差は約1.1[mm]に過ぎず、装置の距離分解能(≒0.75[m])と比べて遥かに小さな値である。言い替えれば、2つの測定時間を通して、各被探知目標の距離は同じとみなすことができるため、距離遅延によって定まる周波数ωB1及びωB2は、概ね同一の値ωBとなると考えて良い(式(2.1)参照。具体的には、周波数ωB1及びωB2は40[m]で概ね13[kHz]となる)。以上より、上記式(1.9a)及び(1.9b)は以
下の式(2.2a)及び(2.2b)のように書き換えることができる。
【0045】
【数12】
一方、ドップラー周波数に対応する位相及び空間位相について考えると、例えば上記式(2.2a)におけるvTX1RX,n(t)の総和項のexpの括弧内は、下記式(2.3a
)で表わすことができる。この式(2.3a)によれば、時間的に不変の空間位相(n−1)dsin(θm)が、時間に従って変化するドップラー位相推移2vmtと同程度のオーダーとなる(なお、ドップラー周波数は10[km/h]で1.4[kHz]程度である)。
【0046】
この結果、図6に示すように、時間ドメインにおいて角度推定を行った際に観察された現象(時間的に不変であるはずの角度が時間に応じて変化するかの如く振る舞う)が生じると考えられる。このような現象が上述のような問題点(図5で示されるような誤推定)を招いていると考えられる。
【0047】
【数13】
そこで、上述した問題点を解決する手法として、先ず、時間ドメインで信号の位相差をキャンセルすることによって、時間に応じて変化するドップラー位相推移の影響も含めた補正を行うことが考えられる。具体的には、基準組み合わせに対する上記式(2.2)を用い、以下の式(2.4)によって補正量を算出する。そして、vTX2RX,n(t)の全て
のn及びtについて、この補正量を用いたexp[−jdψ(t)]を掛けることで、vTX2RX,n(t)の位相誤差をvTX1RX,n(t)の位相誤差と共通の位相誤差ΔψTX1(t)
に合わせた後、合成開口を行う。
【0048】
【数14】
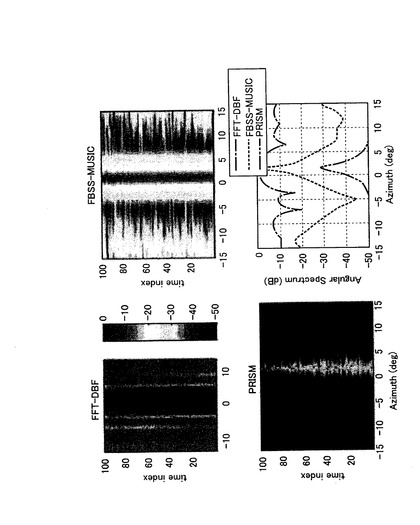
図7は、このようにして得られた信号に測角アルゴリズムを適用した結果を示すグラフである。図7によれば、時間ドメインで信号の位相差をキャンセルすることにより、予想通り角度の時間変化が打ち消されている。しかしながら、やはり、被探知目標の個数と角度は誤推定されたままである。
【0049】
そこで、上記式(2.2a)及び(2.2b)を見直すと、距離遅延によって定まる周波数が13kHz程度であったのに対して、ドップラー周波数は1.4kHzと10分の1程度である。このため、式(2.2a)及び(2.2b)は、キャリア信号exp(jωBt)に総和記号内の時間変項で振幅変調が掛かっているものと見なせる(勿論、ここ
でいうキャリア信号とは周波数ωcのシステムキャリア信号ではない)。即ち、上記式(
2.2a)において、vTX1RX,n(t)の総和項のみを取り出して整理すると、下記式(
2.5)のように示すことができる。
【0050】
【数15】
式(2.5)の最右辺は、2つの目標からの信号が合成された結果、信号処理部からは、実質上、複素成分exp()と実数成分cos()との積として表せる1つの信号と見えることを意味している。即ち、複素成分は2つの被探知目標の平均ドップラー周波数と平均角度を持つ1つの被探知目標が存在しているかのように振る舞う。また、実数成分からは2つの被探知目標のドップラー信号間のビート成分が発生しており、振幅変調(AM)成分の包絡線となることが分かる。
【0051】
上述の擬似的な単一目標に由来する複素信号に先述のビート信号で振幅変調(AM)が掛かった信号が式(2.5)の実体である。これが、時間ドメインに於いて、位相補正から開口合成を行う事で、角度の時間変化は補正出来たにも拘らず、被探知目標の個数と角度の誤推定までは解決されなかった原因である。なお、元の被探知目標のドップラー信号間のビート信号(AM成分)は、式(2.5)(一般的には、式(1.9)や式(2.2))の包絡線として求められる事は明らかである。
【0052】
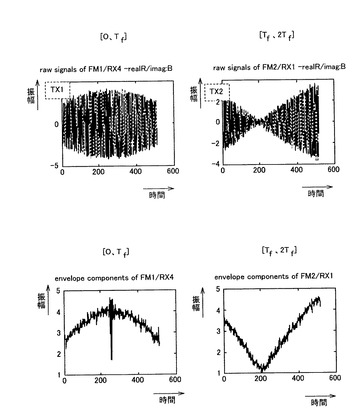
図8は、上記の結論の妥当性を検証する為、基準受信アンテナにおける復調信号とこの復調信号にヒルベルト(Hilbert)変換を施して得られた包絡線信号(AM成分)とを併
記したグラフである。各復調信号(式(2.2a)及び(2.2b))は上部に示され、各包絡線信号は下部に示されている。
【0053】
図8によれば、2つの測定時間[0、Tf]、[Tf、2Tf]で得られた受信信号の位
相が包絡線の影響によって大きく異なっていることが表されている。また、各包絡線信号の周波数(バイポーラ信号とみなした時)は、約73Hzであり、装置の最小周波数分解能である500Hzより遥かに小さい。このため、周波数ドメインで位相補正を施しても正確に開口合成ができないことが明らかである。
【0054】
<第1実施形態>
以下、本発明の第1実施形態に係る探知測距装置について説明する。図9は、第1実施形態に係る探知測距装置の具体例であるレーダ装置の構成例を示す。図1に示した比較例と共通な構成要素には、同一の符号を付している。実施形態に係るレーダ装置として、プローブ信号にFMCW(Frequency Modulated Continuous Wave)を採用したレーダ装置
について説明する。レーダ装置は、車両のような移動体に搭載されることが想定されている。
【0055】
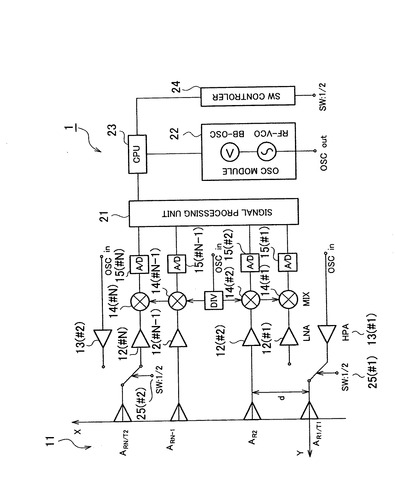
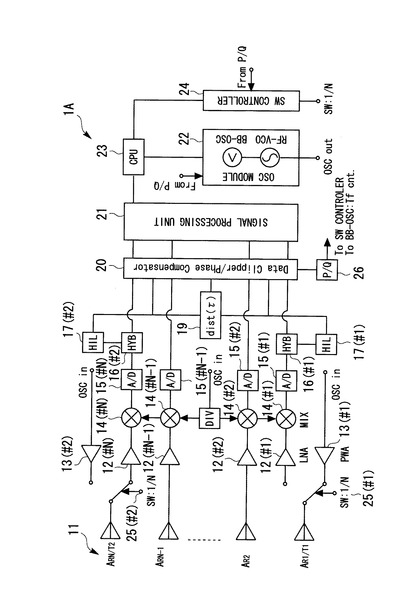
図9において、レーダ装置1Aは、比較例と同様の構成を有するアレイアンテナ11、低雑音増幅器(LNA)12、電力増幅器(PWA)13、ミキサ(図9に示すMIX)14、A/D変換器15(一時的にデジタルデータを格納するメモリを実装する様に構成しても良い)、分岐器(ハイブリッド:HYB)16、包絡線検波部(HIL)17、積
分距離計算部(dist(τ))19、データクリッパ(Data Clipper)及び位相補正部(Phase Compensator)20、信号処理部(Data Processing Unit)21、発振モジュール22
、CPU(Central Processing Unit)23、スイッチコントローラ(SW Controller)24、スイッチ(SW)25、送信サイクル設定器(P/Q)26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0056】
発振モジュール22は、DDS(Direct Digital Synthesizer)等、ディジタル的に直接FMCW信号を生成可能な発振器を適用可能である。但し、図9には、一般的なアナログ式の回路構成、即ち、ベースバンド発振器(BB−OSC)と高周波電圧制御発振器(RF−VCO、勿論、電流制御型でも良い)とを組み合わせた発振モジュール22が図示されている。発振モジュール22では、BB−OSCから出力される基準信号がRF−VCOへ送られ、RF−VCOは基準信号によって周波数変調されたシステムリファレンス信号を出力する。基準信号には例えば三角波(図10)が利用される。
【0057】
PWA(HPA)13は、送信アンテナに対応する処理系統に設けられる。図9の例では、送信アンテナとして利用される2つの送信アンテナAT1及びAT2に対応して2つのPWA13(#1)及びPWA13(#2)が設けられている。PWA13は、発振モジュール22から出力されたシステムリファレンス信号を増幅する。PWA13から出力されるシステムリファレンス信号は、送信アンテナとして選択されている送信アンテナAT1及びAT2の一方から目標探知用のプローブ信号として出力される。
【0058】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。図9の例では、直線上に配列された各アンテナ素子のうち、両端の2つのアンテナ素子は、送信及び受信の双方に利用(共用)され、それ以外のアンテナ素子は受信専用で利用される。以降、送信及び受信に利用されるアンテナ素子を共用アンテナAR1/T1、
ARN/T2と表記することもある。
【0059】
各共用アンテナ共用アンテナAR1/T1、ARN/T2は、スイッチ25により時分割で送信用又は受信用に切り替えられる。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように、レーダ装置1Aでは、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0060】
スイッチ25は、スイッチコントローラ24からの制御信号に応じて、共用アンテナAR1/T1、ARN/T2の夫々を、送信状態と受信状態との間で切り替える。具体的には、共用アンテナAR1/T1は、スイッチ25(#1)によって、PWA13(#1)に接続される送
信状態と、LNA12(#1)に接続される受信状態との間で切り替わる。共用アンテナAR1/T1は、送信状態において送信アンテナAT1として動作し、受信状態において受信ア
ンテナAR1として動作する。同様に、共用アンテナARN/T2は、スイッチ25(#2)に
よって、PWA13(#2)に接続される送信状態と、LNA12(#N)に接続される受信状態との間で切り替わる。共用アンテナARN/T2は、送信状態において送信アンテナ
AT2として動作し、受信状態において受信アンテナARNとして動作する。
【0061】
スイッチコントローラ24は、CPU23から送られて来る送信サイクル情報(P/Q)、及び発振モジュール22のベースバンド発振器から出力される基準信号の周期Tfに
応じて、スイッチ25の切り替えタイミングを制御する。
【0062】
送信サイクル設定器26は、信号処理部21からの要求により基準信号の周期Tf又は
送信サイクル情報(P/Q)の変更指示をCPU23へ送る。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として(但し、個々の共用アンテナを1つのタイム
スロットの中で送受用途に切り替える際のデューティー比は無視)、送信アンテナAT1を利用するタイムスロットの比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。
【0063】
スイッチコントローラ24は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。また、スイッチコントローラ24は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用アン
テナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNとし
て利用する。
【0064】
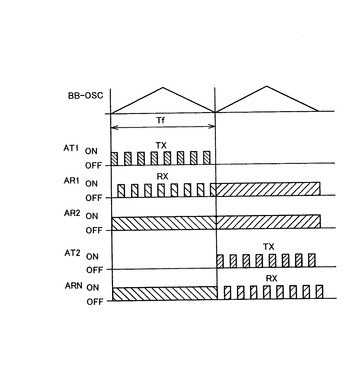
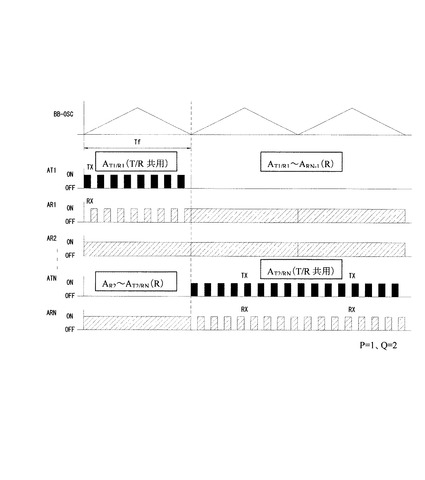
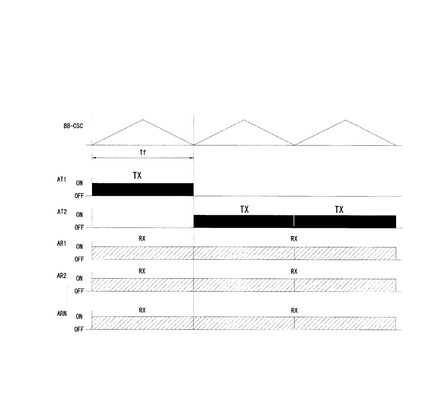
図10は、送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャートである。時間は紙面の左から右に向かって流れている。図10に示す例では、時間[0、Tf]では、送信アンテナAT1は、所定の周期Tfにおいてプローブ信号を放射し、受信アンテナARNは継続的にエコー信号を受信する。測定時間[Tf、3
Tf]では、送信アンテナAT2は所定の時間区間(2Tf)に亘ってプローブ信号を放射し、受信アンテナAR1は継続的にエコー信号を受信する。
【0065】
図10のタイミングチャートを参照し、測定開始時刻を0として、本実施形態に基づく「装置としての動作の1周期」を示すと、タイムスロット[0、PTf]では共用アンテ
ナAR1/T1が共用アンテナとして動作する一方で、アンテナAR2〜ARNが受信アンテナと
して動作する。また、タイムスロット[PTf、(P+Q)Tf]では、アンテナARN/T2
が共用アンテナとして動作する一方で、アンテナAR1〜ARN-1が受信アンテナとして動作する。
【0066】
図9に戻って、LNA12は、受信アンテナに対応する処理系統に設けられる。図9の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ25(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ25(#2)の切り替えにより受信アンテナARNに接続される。各LNA12は、接続される受信アンテナからエコー信号(受信信号)を受け、受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0067】
ミキサ14(14(#1)〜(#N))は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール22から送られるシステムリファレンス信号と混合させることにより、受信信号をベースバンド信号に変換する。
【0068】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリング周波数でディジタルベースバンド信号に変換する。以降、このディジタルベースバンド信号を復調信号と表記することもある。
【0069】
HYB16は、受信アンテナAR1及びARNで受信された信号の復調信号を処理するために、受信アンテナAR1及びARNに対応する各処理系統にそれぞれ設けられる。具体的には、HYB16(#1)はA/D変換器15(#1)に接続され、HYB16(#2)はA/D変換器15(#N)に接続される。
【0070】
言い換えれば、HYB16は、アレイアンテナ11に於いて空間位相が等しくなる送信
アンテナ及び受信アンテナの組み合わせにおける受信アンテナで受信された信号を処理する処理系統に設けられる。従って、HYBとHILとを実装する箇所を、図9に示すようなアレイアンテナの最外縁の受信アンテナに限定する必要はない。開口合成操作は、このように等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせで受信された信号を基準として実行される。以降、このように開口合成の基準として採用される送信アンテナ及び受信アンテナの組み合わせを基準組み合わせと表記し、基準組み合わせにおける送信アンテナ及び受信アンテナを基準送信アンテナ及び基準受信アンテナと表記する。
【0071】
なお、第1実施形態では、基準送信アンテナAT1と基準受信アンテナARNの組み合わせと基準送信アンテナAT2と基準受信アンテナAR1との組み合わせが、最も開口拡大率の良い基準組み合わせとなる。基準組み合わせにおいて送受信される信号の経路は、“基準パス”と呼ばれる。具体的な他の基準組み合わせとしては、基準送信アンテナAT1と基準受信アンテナAR1の組み合わせと基準送信アンテナAT2と基準受信アンテナARNとの組み合わせ等が考えられる。この場合、基準とする位相長はゼロになる。なお、基準組み合わせという語と基準パスという語とを区別しないで用いる事がある。
【0072】
図10のタイミングチャートに従ってレーダ装置1Aを動作させた場合における開口合成が成立する条件は、図3で表すことができる。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間A
とも表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、3Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している(但し、実際に図3に示してあるタイムスロットBは[Tf、2Tf]である)。
【0073】
図3から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0074】
HYB16は、A/D変換器15から出力される復調信号を包絡線検波部17方向とデータクリッパ/位相補正部20方向とに分岐する。包絡線検波部17は、基準受信アンテナで受信されたエコー信号の復調信号を処理するために各HYB16にそれぞれ接続される。包絡線検波部17は、HYB16から入力される復調信号の包絡線成分を検出する。以降、包絡線検波部17で取得した包絡線成分を包絡線信号と表記する場合もある。
【0075】
包絡線検波部17は、例えば、信号処理部21で行われる高速フーリエ変換(FFT(Fast Fourier Transformation))の最小周波数分解能より長い周期(低い周波数)を持
つ信号成分の存在を検出した場合、取得された包絡線信号を積分距離計算部19に送る。なお、包絡線検波部17は、当該フーリエ変換の最小周波数分解能より長い周期を持つ包絡線成分の存在を検出した場合に限り、上述の送信サイクル情報(P及びQ)でのプローブ信号放射をCPU23に要求するように送信サイクル設定器26へ依頼するようにしてもよい(P、Q、及び、Tfの値を変更する事も含む)。なお、包絡線検波部17は、例
えば、ダイオード検波器、直交復調器、ヒルベルト変換器、ウェーブレット変換器、フィルタバンク等を利用して実現される。
【0076】
第1実施形態では、包絡線検波部17には、ヒルベルト変換器が適用されている。ヒルベルト変換器は、複素信号の実数成分のみからなる信号(実際に測定される復調信号は全て実数である)に対するヒルベルト変換を行い、虚数成分を求める。これによって、複素信号(解析信号)が得られる。その後、ヒルベルト変換器は、実数成分の自乗と虚数成分
の自乗との和の平方根をとる。
【0077】
もし、ミキサ14、或いはA/D変換器15の出力がI/Q(同相/直交)成分に分離されているならば、包絡線は計算式“sqrt[I2(t)+Q2(t)]”(すなわち、I2(t)+Q2(t)の平方根)によって簡易に求めることができる。この場合、ヒルベルト変換の操作は不要となる。なお、得られた包絡線に対しては、適宜、雑音除去のための平滑処理が行われる。また、信号処理部21による開口合成時の位相補正では、unwrap処理が施される。
【0078】
データクリッパ/位相補正部20のデータクリッパは、各タイムスロットに於いて各受信アンテナで受信された信号の復調信号を各A/D変換器15からそれぞれ受け、それぞれメモリに保持する(即ち、このメモリは上述した「装置としての動作の1周期」に得られるA/D変換器15からの出力をタイムスロット毎及び受信系(アンテナ〜A/D変換器)毎にアクセス可能な形で保存しておく事ができ、更に、後述の各操作に於いては所望のタイムスロットに於ける所望の受信系からのデータが、適切に出力する事ができるものとする)。
【0079】
データクリッパは、積分距離計算部19から送られた遅延量に基づいて、入力された各復調信号の包絡線成分の位相を合わせる。具体的には、データクリッパは、[Tf、3Tf]間の各復調信号から当該遅延量以降のTf時間分の信号をそれぞれ切り出す。これによ
り、[0、Tf]間の各復調信号と包絡線の位相が一致するデータを、[Tf、3Tf]間
の各復調信号から取得することができる(即ち、異なるタイムスロットに於いて取得したデータ列から、包絡線の位相が一致したデータ列を得られる)。データクリッパは、このように位相補正された各復調信号を位相補正部へ送る。
【0080】
データクリッパ/位相補正部20の位相補正部は、データクリッパから送られて来る包絡線成分の位相が揃った各復調信号を受け(なお、ここで用いた具体例に於いて、データクリッパから送られてくるデータの長さは、タイムスロット[0、Tf]のそれと同じで
ある)、これら各復調信号の残留位相誤差を補正する。具体的には、各回路素子の特性バラツキ等も含めてベースバンド信号に含まれる残留位相誤差の影響をキャンセルするために、式(2.4)を用いて(時間ドメインに於ける)補正量を算出し、この補正量に応じて、データクリッパで包絡線の位相が合う様に切り取られた測定時間[Tf、3Tf]における各復調信号の位相誤差を他の測定時間[0、Tf]での各復調信号の位相誤差にあわ
せるように補正する(但し、包絡線の位相を揃えたデータであれば、時間ドメインのデータにFFTを掛けて周波数ドメインのデータに変換し、式(1.13)式で補正量を算出し、周波数ドメインに於いて上述の様な補正処理を実施しても良い)。このように残留位相誤差の補正が行われた各信号は、信号処理部21へ送られる。
【0081】
信号処理部21は、データクリッパ/位相補正部20から送られる各信号を開口合成し、開口合成された信号にDBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、PRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法等のような既知の角度推定アルゴリズム(以降、単に測角アルゴリズムと表記する)を適用する。なお、時間ドメインで開口合成された信号をフーリエ変換(FFT(Fast Fourier Transformation))等により周波数ドメインの信号に変換
し、この周波数ドメインの信号に対して測角アルゴリズムを適用するようにしてもよい。開口合成手法及び測角アルゴリズムは周知の技術を用いればよいため、ここでは説明を省略する。なお、信号処理部21は、測角アルゴリズムにおいて、自己相関成分を含まない相関行列を用いるようにしてもよい。
【0082】
また、信号処理部21は、包絡線検波部17から包絡線そのものの周波数、乃至、この
包絡線を構成する信号成分の個々の周波数の情報を取得し、所定の方法により包絡線成分(或いは、上記の各量)を取得するようにしてもよい。この場合、信号処理部21は、この周波数成分(或いは、上記の各量)が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにしてもよい。
【0083】
ところで、比較例に関して明らかにした様に、同一距離に存在する複数の被測距目標が小さな速度差で運動している場合、ドップラー周波数の差分の周波数を持つ振幅変調(AM)成分が発生する。ドップラー周波数の差分の周波数が信号処理部(Signal Processing Unit)21で利用する第1の周波数分析部(例えばFFT)の解像度より小さい場合には、周波数ドメインに於ける位相補正法では開口合成が適正に行われない。時間ドメインで補正を行っても、十分な開口合成結果が得られないことがあった。
【0084】
そこで、第1実施形態では、基準パスの信号を包絡線検波部17によって監視する。監視において、第1の周波数分析部の最小周波数分解能より長い周期を持つ包絡線成分が存
在した場合には、TX1(送信アンテナAT1)からPTf時間、TX2(送信アンテナAT2)からQTf時間(P,Q∈Z)プローブ信号を放射する。
【0085】
積分距離計算部19は、TX1及びTX2の夫々に対応する基準パスの包絡線位相が一致するまでのタイムラグを検出する。具体的には、積分距離計算部19は、パラメータτに関して積分距離dist(τ)を計算し、積分距離が最小となった際のパラメータτの値を以て包絡線位相が一致するまでのタイムラグが検出されたものとする。
【0086】
そして、データクリッパ/位相補正部20におけるデータクリッパによって、TX1又はTX2(例えばTX1)の位相を基準として、上述のタイムラグからTX2のプローブ信号による各受信アンテナのデータ(復調信号)をTf時間分切り出し、基準パスの包絡
線成分も含めた復調信号について、位相補正部で位相補正が行われる。
【0087】
上記した積分距離計算部19、データクリッパ/位相補正部20による操作でも適正な開口合成結果が得られない程度にドップラー周波数の差分周波数が小さい場合には、プローブ信号の送信サイクル設定器(P/Q)26からRF−VCOへの変調入力信号の周期Tf自体を変更する指令(制御命令)が出力される。制御命令は、例えばCPU23から送信サイクル設定器26へ出力することができる。但し、制御命令の出力ソースはCPU23に限られず、データクリッパ/位相補正部20や信号処理部21、或いは他の制御装置から出力することができる。また、図9の例では、データクリッパと位相補正部とが同一のブロックで表されているが、これらは異なるハードウェアチップで実現されることができる。
【0088】
或いは、P及びQの少なくとも一方の値を大きくする制御信号が出力されるようにしても良い。P及びQの少なくとも一方を大きくする程度は、最小差分周波数の逆数に比例した観測時間が要求される。このため、具体的な値は、レーダ装置1Aを搭載した車両(移動体)の走行環境に応じて設定される。P,Qの値は、特に、料金所や交差点等の渋滞箇所では非常に大きくなると考えられる。制御命令の出力トリガは、レーダ装置1Aのユーザによるマニュアル操作、或いは、車両(移動体)に搭載された走行環境を検知するセンサ(例えば、レーダを搭載する車体に装備された速度計で検出される移動速度、GPSやDSRC等のインフラベースの環境情報提供装置)に応じて発せられるようにすることができる。
【0089】
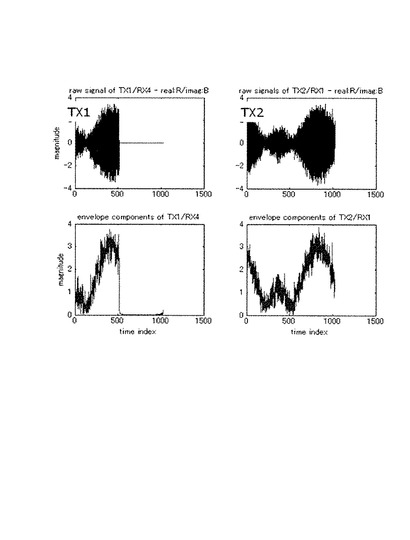
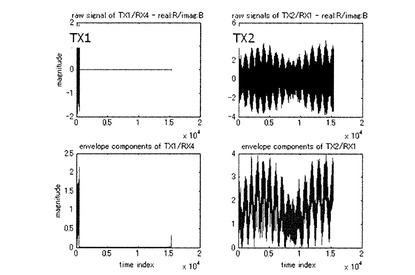
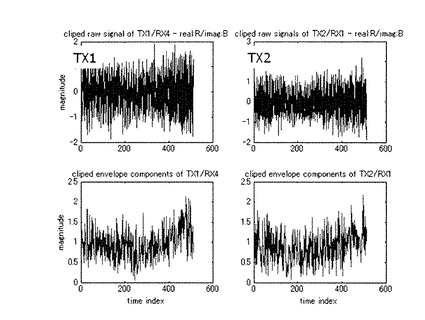
図11は、探知目標数を3とし、各目標T1,T2,T3の諸元が、T1(40[m]、0[deg]、10[km/h])、T2(40[m]、3[deg]、11[km/h])、T3:(40[m]、6[deg]
、12[km/h])、信号対雑音比(SNR)=30[dB]である場合において、図9のレーダ
装置1Aを図10のタイミングチャートに従って動作させたときの各基準パスのエコー信号とその包絡線を示す。図11中の左側に、送信アンテナTX1に対する基準パスのエコー信号(復調信号)(上段)及び包絡線(下段)を示し、図11中の右側に送信アンテナTX2に対する基準パスのエコー信号(復調信号)(上段)及び包絡線(下段)を示す。図11の例では、計算の簡易化のため、TX1に対する基準パスのエコー信号にゼロパディングを行い、TX2に対する基準パスのエコー信号のデータ長を一致させている。
【0090】
図12は、図11に示した包絡線の位相が一致するタイムラグを、基準パスの復調信号の包絡線vTX1,envRX,N(t)、vTX2,envRX,1(t)の積分距離の最小値から計算した例である(但し、以降の積分距離の計算例では、見易くする為、平均操作を行う前の値で示している)。積分距離dist(τ)は次式(3.1a)で与えられる。dist(τ)の計算は、図9に示した積分距離計算部19で実行される。なお、メモリの節約等を目的として利用するタイムスロットを[0、Tf]の1区間分に限定したい場合は、式(3.1b)を式(3.1b)の代わりに利用しても良い。
【0091】
【数16】
また、本発明の実施形態の本質は、復調信号の包絡線vTX1,envRX,N(t)、vTX2,envRX,1(t)を時間の関数と見なした時に、この2つの関数間の距離が最小となる時間区間を見つける事である。このため、タイムスロットの占有時間やその順番に合わせた各種の場合分けや付帯操作 ― 例えば、積分区間の設定や、距離計算を行う上でvTX1,envRX,N(t
)、vTX2,envRX,1(t)の存在する時間区間を合わせる操作(PTf、乃至、QTfの加
算/減算)、或いは、平均操作等(積分区間の幅での除算)等 ― は、装置上で式(3.1a)をどの様に実装するかによって適宜決めれば良い。この意味でP≠Qなる場合、不足するデータ分をゼロパディングによって補えば、積分距離の演算自体は、一般的な関数間で積分距離を求める単一の式で事足りる。
【0092】
図13は、図12で検出されたタイムラグ(Lag)に基づいて、図11に示した信号vTX2RX,1(t)の全区間に渡るデータ(復調信号及び包絡線)から、Lag+[0、Tf]に該当する区間を切り出したグラフ(右側)と、[0、Tf]に於ける復調信号vTX1RX,N
(t)及び包絡線のグラフ(左側)とを示す。図13に示すように、包絡線の位相が揃っ
たデータ(信号)が得られている。このような位相を揃える操作は、図9に示したデータクリッパ/位相補正部20におけるデータクリッパによって実行される。
【0093】
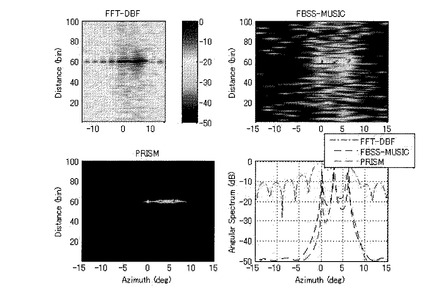
図14は、図13に示した基準パスの信号を用い、復調信号vTX2RX、n(t)に対して図9のデータクリッパ/位相補正部20における位相補正部で位相補正を行い、信号処理部21において開口合成を行い、合成された信号にFFTを施し、周波数ドメインで測角を実施した結果を示す。位相補正は、上記した式(2.4)に基づいて実行される。図14に示すように、既存の超分解測角手法であるMUSICやPRISMと、上記したような基準パス信号の包絡線の位相が一致するタイムラグを用いた位相補正手法との組合せによって、好適
な推定が実現されていることが分かる。
【0094】
上述した位相補正手法を適用した別の計算例を図15〜18に示す。別の計算例では、各目標諸元がT1(40[m]、0[deg]、10[km/h])、T2(40[m]、3[deg]、10.1[km/h])、T3(40[m]、6[deg]、11[km/h])、SNR=30[dB]である。また、レ
ーダ装置1AにおけるP,Qの値がP=1,Q=30に設定されている。さらに、レーダ装置1Aは、図10に示したタイミングチャートに従って動作した。
【0095】
相対速度差の最小値が僅か0.1[km/h]=0.028[m/sec]、即ち、周期Tf毎に生じる目標の距離差が僅か0.11[mm]という微少摂動に対しても、レーダ装置1Aにおける位相補正方法の有効性が示された。因みにこの距離変動は、直接スペクトラム拡散型のレーダを用いても検出困難である(具体的には、占有帯域が1GHz程度で10cmの距離差しか検出できない)。この事実は、超広帯域探知測距装置でも困難な微少距離の測定が実施形態のレーダ装置によって実現されている事をも表している。
【0096】
上記の位相補正手法は、複数の距離に相対速度が近接した複数の被探知目標が存在する場合でも対応可能である。以下にその理由を示す。例えば、距離r1に目標T1(r1、θ1、v1)、目標T2(r1、θ2、v2)が存在し、距離r2に目標T3(r2、θ3、v3)、目標T4(r2、θ4、v4)が存在する場合を考える。
【0097】
このとき、目標T1,T2の距離r1によって定まる周波数はωB1≒ωB2=ωB1と定義で
きる。また、目標T3,T4の距離r2によって定まる周波数はωB3≒ωB4=ωB3、と定義
できる。このため、各目標の角度によって定まる空間位相をφTX1/2,mn、速度によって定まるドップラー周波数をωcμm(m=1〜4)と定義すれば、TX1からのプローブ信号をn番目の受信アンテナで受信して得られるベースバンド信号は以下の式(3.2)で表すことができる(簡単の為、片側のTXだけについて示す)。
【0098】
【数17】
ここで、空間位相は時間不変であるから、見通しを良くする為、以下の式(3.3a),(3.3b),(3.3c)のようにベクトルμ,ベクトルφ,合成包絡線A(t:μ,φ)を表し、さらに時変項に注目して以下の式(3.4a)及び(3.4b)のように表す。
【0099】
【数18】
すると、式(3.2)は、次の式(3.5)に書き換えることができる。
【0100】
【数19】
即ち、基準パスの信号も含め、TX1からのプローブ信号に対して各受信アンテナから得られるエコー信号は、(ωB1+α1+ωB3+α3)/2なる周波数を持つ合成ベースバンド信号を合成包絡線A(t:μ,φ)で変調した信号となる。
【0101】
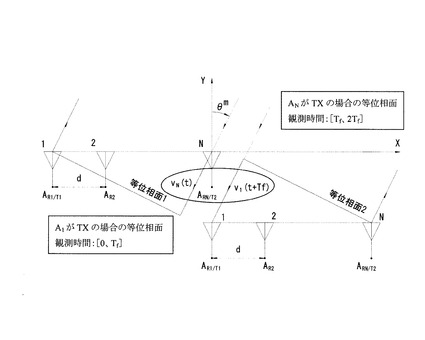
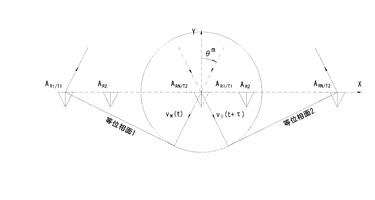
図19は、上記の数学的説明を模式的に示した図で、或るタイムスロットでTX1からプローブ信号を送信して得られた目標からのエコー信号の等位相面と、別のタイムスロットでTX2からプローブ信号を送信して得られた目標からのエコー信号の等位相面との関係を、基準パスとの関係で示している。
【0102】
この様に、2つのタイムスロットに於けるエコー信号の等位相面は合成包絡線をそれぞれの半径(図16からも明らかな様に、一般的に各合成包絡線の極座標上に於ける軌跡は単純な円や楕円とはならないが、目標数や諸元等が急激に変化しない限り、異なるタイムスロット間で測定した基準パスの位相が揃う時間帯が必ず存在する ― この前提が崩れた場合、空間平均を含む角度推定の前処理等も全て無効になる)として位相関係が時間に沿って回転していると考える事ができる。即ち、この2つの等位相面を合成するには、2つの発想がある。第1には、基準パスの信号の内積が最大となる遅延時間を探すことであり、第2には、基準パスの信号の差分が最小になる遅延時間を探す事である。第1実施形態における位相補正方法では、後者の発想を採用している。
【0103】
後者の発想では、積分距離を与える式(3.1a)に於いて、基準パスの信号vTX1,envRX,N(t)、vTX2,envRX,1(t)は異なるタイムスロットに於いて取得されたものであるから、信号の位相が一致した後に残留する成分は各々相関の無い雑音成分となる。即ち、基
準パスの位相が一致した時の積分距離は雑音電力と等しくなる。従って、基準パスの位相合成を判定する閾値として、積分距離が無信号時の雑音電力と概ね等しいか否かといった定量的な基準を採用することができる。
【0104】
図20は、別の計算例で示したような状況に於いて成立することを実証する計算例である。条件は、距離40mに目標T1(0[deg]、10[km/h])、T2(3[deg]、11[km/h])が存在し、距離60mに目標T3(−3[deg]、12[km/h])、T4(−6[deg]、13[km/h])が存在していると仮定している。図20によれば、明らかに、4つの目標に対して開口合成が成立していることが分かる。
【0105】
第1実施形態によるレーダ装置1Aによれば、TX1とTX2とに対応する基準パスの包絡線情報から、各測定時間に於いて開口合成が成立するデータ(信号)の位相を揃えることで、任意の状況に於いて実効的な受信センサの個数を増加させ、小型で多くのセンサを備えた探知測距装置を実現することができる。従って、実際の受信センサ数で分離可能な数より多くの目標に対して、精度の良い角度推定性能を発揮できる。
【0106】
また、第1実施形態によるレーダ装置1Aによれば、単純な回路で開口合成を確立することが可能である。もっとも、レーダ装置の応答速度を向上させる為には、周波数毎に処理するのが望ましい。
【0107】
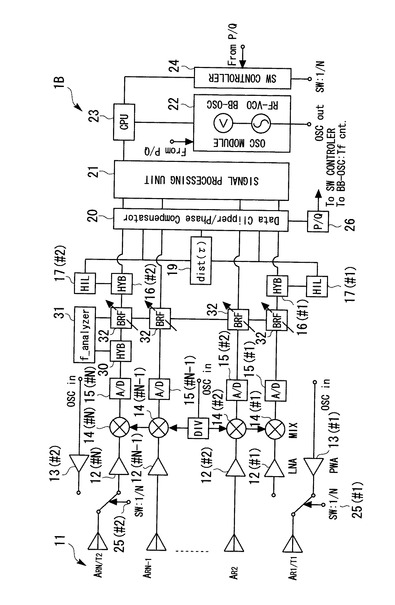
<第2実施形態>
図21は、本発明の第2実施形態に係る探知測距装置(レーダ装置1B)を示す図である。第2実施形態は、第1実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0108】
レーダ装置1Bがレーダ装置1Aと大きく異なる箇所は、以下の点である。(1)少なくとも1つの基準パスの包絡線検波部17(図21では17(#2))の手前に、分岐器(HYB)30が配置され、第2の周波数分析部として配置された周波数分析部(f_analyzer)31と接続されている。(2)各受信アンテナに対応するベースバンド信号径路上に、中心周波数が可変のBPF(Band Pass Filter)32が設置されている。具体的には、各BPF32は、A/D変換器15とHYB16との間、又はA/D変換器15とデータクリッパ/位相補正部20との間に配置されている。
【0109】
レーダ装置1Bでは、周波数分析部31が基準パスの受信信号の復調信号(図22では、受信アンテナARNの復調信号)に対するフーリエ変換を行い、ベースバンド信号(復調信号)を構成する周波数を分析し、分析結果に基づいてN個の受信アンテナに対応するBPF32の中心周波数を制御する。包絡線検波部17は、BPF32によって帯域分割された各基準パスの受信信号(復調信号)に包絡線検波を施す。積分距離計算部19は、包絡線間の積分距離を求め、最小の距離値を与える遅延量(τ)から帯域毎の基準パス間の位相補正量を求める。データクリッパ/位相補正部20は、位相補正量を用いて包絡線も含めた当該帯域内の信号の全ての受信信号の位相を揃え、信号処理部21での開口合成機能を実現する。
【0110】
なお、BPF32の処理系列がN個の受信アンテナ毎に1つである場合には、上記した遅延量(τ)を求め、開口合成を行う操作を分割された帯域分だけ繰り返すことが要求される。よって、周波数分析部31及び中心周波数可変BPF32との組み合わせは、フィルタバンクで代用することができる。
【0111】
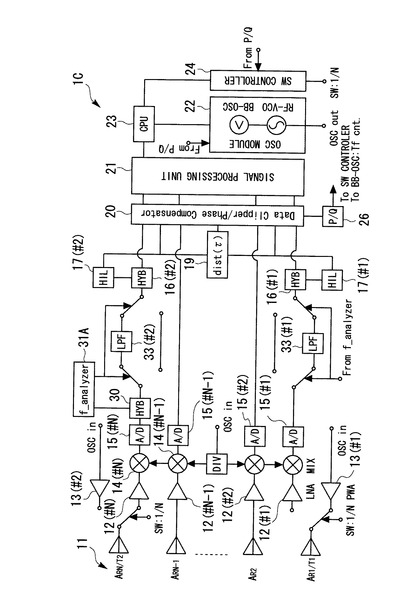
<第3実施形態>
図22は、本発明の第3実施形態に係る探知測距装置(レーダ装置1C)を示す図であ
る。第3実施形態は、第1、第2実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0112】
レーダ装置1Cがレーダ装置1A(図9)と大きく異なる箇所は、以下の通りである。(1)レーダ装置1Bと同様に、少なくとも1つの基準パスの包絡線検波部17(図22では17(#2))の手前に、分岐器(HYB)30が配置され、第2の周波数分析部である周波数分析部(f_analyzer)31Aと接続されている。(2)個々の基準パスの信号をLPF(Low Pass Filter)32かスルーラインかを介して、HYB16及び包絡線検
波部17に通す経路が設置されている。
【0113】
レーダ装置1Cの動作は、以下の通りである。すなわち、周波数分析部31Aによって、基準パスの受信信号の復調信号(図22では、受信アンテナARNの復調信号)の周波数成分を分析する。周波数分析結果が、復調信号(ベースバンド信号)から距離及び速度を求めるための信号処理部21に含まれる第1の周波数分析部の最小分解能以下の周波数成分を含んでいた場合には、周波数分析部31Aは、LPF33及びスルーラインの両端に設けられたスイッチを制御して、基準パスの復調信号がLPF33に入力される状態にする。なお、対象の周波数成分を含まない場合には、周波数分析部31Aは、復調信号がスルーラインを通過する状態とする。
【0114】
LPF32又はスルーラインを通過した基準パスの復調信号に対する以降の処理は、第1実施形態と同様である。各LPF33の遮断周波数は、第1の周波数分析部の最小分解能以下の周波数が設定される。周波数分析部31が第1の周波数分析部の最小分解能以下
の信号成分を検出しなかった場合には、周波数分析部31は、各基準パスの信号を、LPF33を介さず、そのまま包絡線検波器17に送出する。このように、周波数分析部31Aは信号径路のスイッチング動作を制御する。従って、本実施形態に於いて信号がスルーライン側から供給された場合、開口合成は包絡線を用いた時間領域で実施しても、比較例と同様にフーリエ変換を用いた周波数領域で実施しても良い。
【0115】
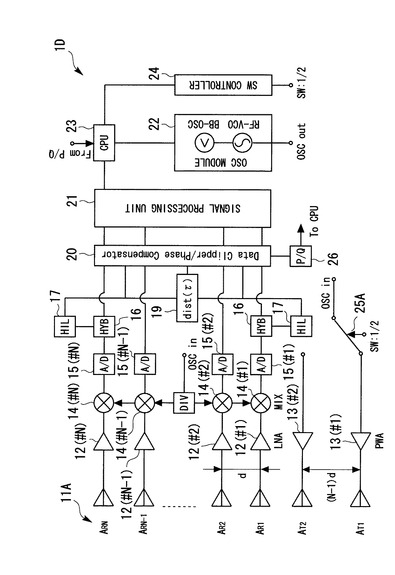
<第4実施形態>
次に、本発明の第4実施形態に係る探知測距装置(レーダ装置1D)について説明する。第4実施形態は、第1実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0116】
第1〜第3実施形態では、図面をコンパクトにする為、アレーアンテナの最外縁に送信/受信共用アンテナ(センサ)を1つずつ配置し、両者に挟まれた空間に受信専用アンテナ(センサ)を配置した構成を装置の具体例として用いてきた。もっとも、送信/受信用(或いは送受共用)センサ(アンテナ)の数は適宜設定可能である。また、送信用センサの配置も、受信用センサ(受信アンテナ)と共用にする必要は無く、お互いに空間的に異なる位置に設置可能である。
【0117】
図23は、第4実施形態に係る探知測距装置(レーダ装置1D)の構成例を示す図であり、図24は、図23のレーダ装置1Dのタイミングチャートである。図23に示すレーダ装置1Dは、レーダ装置1A(図9)における共用アンテナの代わりに、送信専用の送信アンテナAT1,AT2と、受信専用の受信アンテナAR1からARNが設けられている。
【0118】
すなわち、レーダ装置1Dは、受信のためにのみ利用される受信アンテナAR1からARNと、送信のためにのみ利用される送信アンテナAT1及びAT2と、を含むアレイアンテナ11Aを持つ。
【0119】
送信アンテナAT1,AT2には、PWA13が夫々接続されており、各PWA13の入力
端の一方には、スイッチ25Aを介してOSCモジュール22からのシステムリファレンス信号が入力されるようになっている。スイッチ25Aの切替制御は、スイッチコントローラ24によって実行される。送信/受信共用アンテナの代わりに、専用の送信アンテナを設けた事で、装置寸法という面では不利になるが、受信信号利得という面では性能向上が期待できる(図24参照)。
【0120】
第4実施形態では、各受信アンテナの間隔をdに設定した場合、各送信アンテナの間隔は(N−1)×dに設定する。これにより、例えば、送信アンテナAT1と受信アンテナAR1との組み合わせと、送信アンテナAT2と受信アンテナARNとの組み合わせが基準組み合わせとなる。
【0121】
このように、送信アンテナは、受信アンテナと空間的に別の位置に設置可能である。更に、センサ間隔(アンテナ間の間隔。図23中の距離d)が等間隔であることは要求されない。以上の点を除き、第4実施形態は第1実施形態と同様の作用効果を奏する。なお、第4実施形態に係るアンテナアレイ11Aに係る構成は、第2、第3実施形態に適用してもよい。
【0122】
<変形例>
第1〜第4の実施形態で説明したように、実施形態に係るレーダ装置は、包絡線検波部17で基準パスの包絡線の位相を監視し、最小の包絡線の積分距離を積分距離計算部19で求めて如何なる目標に対しても開口合成が破綻しない様な補正を行う。
【0123】
したがって、包絡線の周波数がフーリエ変換を用いて検知できる程十分高い場合には、第1〜第4実施形態におけるレーダ装置1A〜1Dに於ける補正手法を比較例(図1)で採用していた補正手法に切り替えるようにしてもよい(包絡線の周波数が高い場合には、例えば、レーダ装置1Aでは、積分距離計算部19から概ね同じ大きさを持つローカルマキシマム(或いは、ローカルミニマム)が何度も周期的に出現するので簡単に判定することができる。
【0124】
これ以外に合成を行う上で注意の必要な状況は、(3.2)式に空間位相項を組み込んだ
次式(4.1)から判明する様に、空間位相とドップラー成分による位相とが等しくなってしまった場合であり、この時には、サンプリング周波数を変更する、不等間隔サンプリングを行う、被探知目標が正常に検出されていた時点に得られた目標諸元の値からカルマンフィルタ等の手段で予測される値を用いる、測定時間を所定時間ずらす、或いは、開口合成を行わないで測角を行う等、動作モードを切り替えるようにしてもよい。
【0125】
【数20】
或いは、距離遅延によって定まる周波数ωBを先に検出し、vTX1/2RX、n(t)にexp(-jωBt)を掛けて式(4.1)の成分を復調、或いは、全てのvTX1/2RX、n(t)に包絡線検波を施せば、再び式(1.17)と同じ形の式に書き直せる。したがって、エコー信号が恰もドップラーのみから構成されるかの如くに扱う事で角度推定処理が可能となる(装置構成上の観点から言うと、この方式は実施例4を敷衍した発想である)。
【0126】
但し、各信号に包絡線検波を施して得られる信号とは、|HIL(vTX1/2RX、n(t))|で
あるから、角度スペクトラムがピークを示す目標の角度は実際の値と符号が反転している事に注意する必要がある(言い替えれば、各信号に包絡線検波を施して得られる信号は、100%変調に近い為、信号の絶対値に対して角度推定を行うこと、或いは、時間ダイバーシティによって開口合成を実現していることになる)。
【0127】
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0128】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0129】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【0130】
上述した第1から第4の実施形態は、以下の態様を含むことができる。
【0131】
《態様1》
U個のセンサ素子から構成される送信用センサアレイと、N個のセンサ素子から構成される受信用センサアレイとを利用し(送信センサと受信センサとは共用でも良い、以下同様)、各送信センサから放射されたプローブ信号が被探知目標によって反射される事で生じるエコー信号(以下、受信信号)を各受信センサで測定し、空間位相が等しくなる送/受信センサの組み合わせで構成される基準パスの位相を用いて開口合成を行い、合成された信号から目標の角度を推定する装置、特に探知測距装置Aにおいて、
各基準パスで得られる受信信号に包絡線検波を施し、それらの積分距離を求め、最小の距離値を与える遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする装置、及び手法。
【0132】
《態様2》
態様1における探知測距装置Aにおいて、装置の変調方式の基本周期、例えば、FMCW装置ではRF-VCOへの変調入力信号の周期:Tfに対し、u番目の送信センサからQuTf時間ずつ
プローブ信号を放射し(Qu∈Z、u=1〜U)、N個の受信用センサは送信時間に対応する時間の信号を受信して各基準パスの信号を包絡線検波し、必要性があれば、max(QuTf)に満
たない受信信号については不足分をゼロパディングして全ての受信信号のデータ長を合わせた上で、基準パスの包絡線の積分距離を求め、最小の距離値を与える遅延量からカウン
トしてmin(QuTf)時間分の信号を切り出す事で包絡線も含めて全ての受信信号の位相を
揃え、目標の状況と無関係に開口合成を実現する事を特徴とする装置、及び手法(特に、min(QuTf)としてTfを採用しても良い)。
【0133】
なお、遅延量に沿って積分距離を求めていった結果、複数の箇所に最小値に極めて近いローカルミニマムが現れる場合もあり得るが、この場合、最も小さな遅延量に対応するローカルミニマムを信号切り出しの基準点として採用する。実用的には最小値はノイズレベル程度になるので、無信号時の雑音レベルをメモリ等に保持しておき、この値を閾値として最小値の判定を行う。
【0134】
更に、最初の遅延量に対して位相合成が成立しない場合は、例えば、目標数の急な変化等の走行環境の変化が合成の阻害要因として考えられるので、次に小さい遅延量を信号切り出しの基準位置として用いるか、開口合成を行わずにDBF等の角度分解能が粗い方式の利用、或いは、インフラベースの走行環境情報提供装置の利用を以て環境情報の把握を行い、装置パラメータ(タイムスロット長Qu,変調入力信号の周期Tf等)の調整を行った後に、再度開口合成を実施する様にしても良い。
【0135】
《態様3》
態様1における探知測距装置Aにおいて、各基準パスで得られる受信信号に包絡線検波を施し、各基準パスの包絡線の自己相関の和と各基準パス間の包絡線間の相互相関の和との差分を求め、この差分が最小となる遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする態様1、2に記載の装置、及び手法。
【0136】
なお、各基準パスの自己相関はそのパスを構成する受信センサに於ける着信信号電力に他ならないので、自己相関を求める代わりに自乗検波器等の回路的手段で置き換えても良い(積分距離の定義の仕方によって必要な場合、平均操作等の付帯操作は実装状況に応じて、適宜、ハードウェア/ソフトウェア的に実現すれば良い)。
【0137】
《態様4》
態様1における探知測距装置Aにおいて、1つの適当な送信センサ:u0に対応する基準
パスに設けた第2の周波数分析部によって、該基準パスの受信信号の周波数成分を分析し
、この周波数分析の結果に基づいて、第2の周波数分析部は、N個の受信センサに設けた中心周波数可変BPF(Band Pass Filter)の中心周波数を制御し、帯域分割された各基準パ
スの受信信号に包絡線検波を施し、それらの間の積分距離を求め、最小の距離値を与える遅延量から帯域毎の基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めた該帯域内の信号の全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする、態様1〜3に記載の装置、及び手法。
【0138】
なお、装置の構成としてBPFの処理系列がN個のセンサ毎に1つである場合は、上記遅延
量を求め、開口合成を行う操作を分割された帯域分だけ繰り返す。よって、周波数分析部と中心周波数可変BPFとの組み合わせは、フィルタバンクで代用しても良い。
【0139】
《態様5》
態様1における探知測距装置Aにおいて、1つの適当な送信センサ:u0に対応する基準
パスに設けた第2の周波数分析部によって、該基準パスの受信信号の周波数成分を分析し
、この周波数分析の結果が、ベースバンド信号から距離/速度を求める為の信号処理手段で利用する第1の周波数分析部の最小分解能以下の周波数成分を含んでいた場合、前記第2の周波数分析部は、各基準パスに設けたLPF(Low Pass Filter)を介して各基準パスの信号をLPFの後段に設けた包絡線検波器に送り、各包絡線検波器から出力された信号間の積
分距離を求め、最小の距離値を与える遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする、態様1〜3に記載の装置、及び手法。
【0140】
なお、各LPFの遮断周波数は、第1の周波数分析部の最小分解能以下の周波数であるものとし、第2の周波数分析部が第1の周波数分析部の最小分解能以下の信号成分を検出しなかった場合は、前記第2の周波数分析部は各基準パスの信号を、LPFを介さず、そのまま包絡線検波器に送出するものとする、即ち、第2の周波数分析部は信号径路のスイッチング動
作を制御する。
【0141】
《態様6》
各目標の走行速度等に関する情報を、車々間通信、或いは、路上中継器や管制センター等のインフラを利用して授受する事で、開口合成を行う為に必要なデータを取得するまでの測定時間(∽1/包絡線に含まれる最小周波数)を予測し、必要なタイムスロットの長
さを定める事で応答速度を改善する事を特徴とした様態1〜3に記載の装置、及び手法。
【0142】
更に、上記の各手段によって取得した測定時間の予測値を、第2の周波数分析部による
フィルタ制御を実施する際の参照値として利用する事で応答速度を改善する事を特徴とした、態様4、5に記載の装置、及び手法。
【0143】
《態様7》
各基準パスの受信信号に包絡線検波を施し、それらの位相を揃える為に積分距離を求めても妥当且つ明確な最小値(実装システムに於ける無信号時の雑音電力レベル程度)が得られない場合、各送信センサからのプローブ信号送信時間:QuTf、或いは、装置の変調方式の基本周期:Tfを変更する事を特徴とする態様1〜6に記載の装置、及び手法。
【0144】
なお、装置の距離分解能等、他の性能を劣化させない為に、装置の占有帯域ΔωもTf
に連動させて変更しても良い。更に、この様な処置を施しても開口合成が成立しない場合、U個の送信センサの一部のみを用いる様にしても良い。
【0145】
《態様8》
基準パスを構成する受信センサを含め、全ての受信センサによる受信信号に包絡線検波を施し、開口合成後に得られる各受信センサの包絡線信号そのものに対して角度推定アルゴリズムを適用する事を特徴とした、態様1〜7の探知測距装置。
【符号の説明】
【0146】
1,1A〜1D レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(PWA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16、30 分岐器(HYB)
17 包絡線検波部(HIL)
19 積分距離計算部(dist(τ))
20 データクリッパ/位相補正部
21 信号処理部
22 発振モジュール
23 CPU(Central Processing Unit)
24 スイッチコントローラ
25 スイッチ
31,31A 周波数分析部
32 中心周波数可変バンドパスフィルタ(BPF)
33 ローパスフィルタ(LPF)
【技術分野】
【0001】
本発明は、開口合成を用いた探知測距装置及び目標探知方法に関する。
【背景技術】
【0002】
探知測距装置、例えば、車載用レーダ(以降、探知測距装置の具体例としてレーダ装置を取り上げる)等には、複数の送信用センサ素子から構成される送信用センサアレイと、複数の受信用センサ素子から構成される受信用センサアレイとを組み合わせ、実効的に受信用のセンサアレイの開口を拡大する技術を採用する事で、性能を犠牲にせずに小型化を実現した装置がある。このような技術は、ホログラフィック開口合成方式、ホログラフ、開口合成等と呼ばれる。開口合成を用いたレーダ装置は、複数の送信センサ素子から(時分割多重、周波数分割多重、或いは、符号分割多重の何れかの方式、又は、その組み合わせで)プローブ信号を放射し、このプローブ信号が被探知目標によって反射されることで生じるエコー信号を複数の受信センサ素子で受信し、各受信センサ素子で受信された信号を合成することにより実効的な受信センサ素子数を増やし、探知可能な目標数を増やすと共に、角度分解能を向上させている。以降、開口合成を用いたレーダ装置を開口合成レーダと表記する。また、センサ素子をアンテナ(素子)、センサアレイをアレイアンテナと区別せずに用いる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−155171号公報
【特許文献2】特開2006−98181号公報
【特許文献3】特開2007−155381号公報
【特許文献4】特開平11−231040号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の開口合成レーダでは、或る特定の条件下においては、被探知目標を正確に探知できないという問題があった。この様な条件としては、例えば、複数の物体がレーダから殆ど同じ視線方向相対距離(以下、単に距離と記す)に存在し、それぞれが殆ど同じ視線方向相対速度(以下、単に速度と記す)で運動している様なケースがある。この様なケースを具体的に考えるならば、渋滞状況等(複数の物体が、近接した位置を小さな速度差で動いている)、日常的に頻発するシーンでも正確に目標を探知できなくなる可能性がある。車載用レーダとしての開口合成レーダはこのような問題点を抱えている。
【0005】
本発明の一態様の目的は、被探知目標を適正に探知する開口合成を可能とすることにある。
【課題を解決するための手段】
【0006】
本開示の各態様では、上述した課題を解決するために、それぞれ以下の構成を採用する。
【0007】
すなわち、第1の態様は、目標を探知するレーダ装置において、
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、
各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、
前記包絡線検波部により取得された各基準パスの受信信号の包絡線間について定義される積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、
前記決定部で決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部と、
を含む。
【0008】
なお、別態様としては、以上の何れかの構成を実現する目標探知方法であってもよいし、そのような方法を実行するプログラムであってもよいし、このようなプログラムを記録したコンピュータが読み取り可能な記憶媒体であってもよい。
【発明の効果】
【0009】
上記態様によれば、被探知目標を適正に探知する開口合成が可能となる。
【図面の簡単な説明】
【0010】
【図1】比較例に係るレーダ装置の構成例を示す図。
【図2】図1のレーダ装置で利用されるタイミングチャート。
【図3】開口合成の成立条件を示す概念図。以下、AR1/T1、ARN/T2を送受共用素子として動作させるタイムスロット(図2のタイミングチャートに従った場合、観測時間:[0、Tf]、[Tf、2Tf])を、それぞれFM1、FM2、或いは、測定時間A、Bと記す。
【図4】シーン設定例を示す図。
【図5】図1のレーダ装置を用いて測角を実施した結果を示すグラフ。
【図6】図5で利用した周波数ドメインの信号を時間ドメイン信号に変換し、測角を実施した結果を示すグラフ。
【図7】図6の時間ドメインの信号に対し、時間ドメインで位相差をキャンセルした場合の測角結果を示すグラフ。
【図8】比較例のレーダ装置によって取得される基準パスのエコー信号とその包絡線を示すグラフ。
【図9】第1実施形態に係るレーダ装置の構成を示すブロック図。
【図10】図9に示したレーダ装置の動作を示すタイムチャート。
【図11】図9に示したレーダ装置によって取得される基準パスのエコー信号とその包絡線を示すグラフ。
【図12】図11に示した包絡線の位相が一致するタイムラグを積分距離から求めた例を示すグラフ。
【図13】図12に示したタイムラグに基づいて切り出した包絡線の位相が揃ったデータを示す。
【図14】位相補正を施して信号の開口合成を成立させた後、FFTを行い、周波数ドメインで測角を実施した例を示す。
【図15】図9に示したレーダ装置によって取得される基準パスのエコー信号とその包絡線の別の例を示すグラフ。
【図16】図15に示した包絡線の位相が一致するタイムラグを積分距離から求めた例を示すグラフ。
【図17】図16に示したタイムラグに基づいて切り出した包絡線の位相が揃ったデータを示す。
【図18】位相補正を施して信号の開口合成を成立させた後、FFTを行い、周波数ドメインで測角を実施した例を示す。
【図19】合成包絡線に対する位相補正を説明する図。
【図20】複数の距離に相対速度の近似した複数の目標が存在する場合における測定結果を示す図。
【図21】第2実施形態におけるレーダ装置の構成例を示す図。
【図22】第3実施形態におけるレーダ装置の構成例を示す図。
【図23】第4実施形態におけるレーダ装置の構成例を示す図。
【図24】第4実施形態におけるタイミングチャート。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態に係る探知測距装置について説明する。以下の実施形態における構成は例示であり、本発明は実施形態の構成に限定されない。
【0012】
<比較例>
本発明の実施形態を説明する前に、比較例について説明する。センサアレイによる目標の角度検知機能を持つ探知測距装置は、基本的にセンサの物理開口によって解像度が決定される。このため、例えば寸法制限の厳しい車載用レーダに適用される探知測距装置では、複数の送信用センサと複数の受信用センサとを組み合わせて、実効的な開口を拡大するホログラフィック開口合成方式(以下、単にホログラフ、若しくは開口合成と呼ぶ)が採用されている。
【0013】
以下、比較例の説明を行うにあたって、探知測距装置の具体例として変調方式にFMCW(Frequency Modulated Continuous Wave)を採用したレーダ装置を考える(従って、セン
サはアンテナとなる)。
【0014】
図1は、比較例に係る探知測距装置(開口合成レーダ装置)の回路ブロック例である。図1において、共用アンテナ(送受信アンテナ)AR1/T1及びARN/T2は、直交座標のX軸に沿って配置されている。受信(RX)用のアレーアンテナ(受信アンテナ)は、原点からX軸の正方向に向かって間隔dで配置されたN個のエレメントアンテナAR1〜ARNからなる。送信(TX)用のアレーアンテナ(送信アンテナ)は、受信用のアレーアンテナの最外縁に配置された2個(U=2)のアンテナAT1及びAT2からなる。
【0015】
レーダ装置1は、オシレータ(OSC)モジュール(発振モジュール)22を備えており、OSCモジュール22は、高周波電圧制御発振器(RF−VCO(Radio Frequency- Voltage Control Oscillator))と、ベースバンド発振器(BB−OSC(Base Band Oscillator))とを備えている。RF−VCOは、BB−OSCから入力される変調入力信号によって、FM変調(周波数変調)を受けた信号をシステムリファレンス信号として出力する。
【0016】
OSCモジュール22からのシステムリファレンス信号は、アンテナAT1及びAT2から目標探知用のプローブ信号として出力される一方で、アンテナAR1〜ARNで受信された目標からのエコー信号を復調する為に用いられる。
【0017】
図2は、図1に示した探知測距装置1のタイミングチャートである。即ち、レーダ装置1は、2つの共用アンテナAR1/T1及びARN/T2を送信に使用する。このため、測定時間[0、Tf]では、共用アンテナAR1/T1を送受信(TX/RX)アンテナとして、受信アンテナAR2〜ARN-1及び共用アンテナARN/T2を受信(RX)アンテナとして用い、測定時
間[Tf、2Tf]では、共用アンテナARN/T2をTX/RXアンテナとして用いるととも
に、共用アンテナAR1/T1及び受信アンテナAR2〜ARN-1をRXアンテナとして用いる。
なお、Tfは変調入力信号の周期である。
【0018】
ここで、各時間区間に於けるプローブ信号、すなわち、送信アンテナAT1及びAT2から放射されるプローブ信号をvTX1(t)、vTX2(t)とおくと、各プローブ信号vTX1(t)、vTX2(t)は周期Tfの信号となるので、それぞれ以下の式(1.1a)及び(1.1b)
で表される。また、vTX2(t)のΔφは送信時間差による位相ズレを示す。
【0019】
【数1】
但し、ωcはRF−OSCのキャリア角周波数(以下の説明では、角周波数と周波数と
は区別しない)であり、h(t)は変調入力信号f(x)に対して、以下の式(1.2)で
定義される。
【0020】
【数2】
簡単の為、変調入力信号f(x)の時間の原点を半周期ズラすと、f(x)は以下の式(
1.3)で表される。なお、式(1.3)中のΔωは片側変調帯域幅である。
【0021】
【数3】
ここで、双方のTXアンテナAT1,AT2からプローブ信号を交互に送信中、M個の被探知目標がレーダ装置1に対して視線方向相対距離rm(m)、角度θm(deg)の位置を視線方向相対速度vm(km/h)で運動し続けると仮定する(但し角度は時不変とする)。このとき、各RXアンテナで受信されるエコー信号(受信信号)vTX1RX,n(t)、及びvTX2RX,n
(t)は、式(1.5)、(1.6a)、(1.6b)の定義を用いて、以下の式(1.
4a)及び(1.4b)で表すことができる(n=1〜N、m=1〜M)。
【0022】
受信信号vTX1RX,n(t)は、測定時間[0、Tf]に於いて、送信アンテナAT1から放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。受信信号vTX2RX,n(t)は、測定時間[Tf、2Tf]に於いて、送信アンテナAT2から
放射されたプローブ信号のエコー信号を受信アンテナAR1〜ARNで受信した各信号を示す。なお、nTX1/2n(t)は加法性ガウス雑音であり、また冗長性を避ける為、以下の説明
で“視線方向”という語は省略する。
【0023】
【数4】
これらのエコー信号(受信信号)は、低雑音増幅器(以降、LNAと表記する)12(12#1〜#N)で増幅され、ミキサ14(14#1〜#N)でOSCモジュール22からのシステムリファレンス信号とミキシングしてベースバンド信号に変換される。
【0024】
ベースバンド信号は、増幅やフィルタリングのような適切なインタフェース(IF)処理が施された後、アナログ/ディジタル変換器(A/D)15(15#1〜#N)において、例えば、サンプリング周波数ωs=ωf*K(但し、ωf=2π/Tf、Kはサンプル数)で
ディジタル信号に変換される。その後、ディジタル信号に変換されたベースバンド信号(ディジタルベースバンド信号(復調信号))は、信号処理部(Signal Processing Unit)21において、各種の信号処理が施され、所望の目標諸元として、被探知目標の距離、速度、及び角度が推定される。
【0025】
ここで、各受信アンテナでの受信信号から得られる各復調信号vTX1RX,n(t)、vTX2RX,n(t)は、復調等に伴う位相誤差を各プローブ信号に起因する量としてまとめてΔψTX1(t)及びΔψTX2(t)で示すと、以下の式(1.7a)及び(1.7b)のように示される。以降、各信号の表記で、例えば、[0、Tf]なる時間区間を動く時間変数tは、δt=Tf/Kで離散化された時間[0,δt,2δt,…,(K-1)δt]を動くと仮定する。
【0026】
【数5】
実際に市場に存在するレーダ装置の諸元に基づいて、上記した式(1.7a)及び(1.7b)から誤差及び空間位相を除いた状態で、FMのダウンチャープによる位相項を取り出して整理すると、以下の式(1.8)が得られる。なお、参考とした装置諸元は、探知距離範囲(最小及び最大探知距離)が1〜200[m]、探知速度範囲が1〜200[k
m/h]、Δωが約50MHz、基準信号(RF−VCOへの変調入力信号)の周期Tfが
1[msec]程度である。
【0027】
【数6】
式(1.8)を参照し、距離遅延による周波数成分(アップチャープの場合は符号が異なる)である−4Δωτm0/TfをωBmとおき、定数項ωcτm0+Δωτm0をΔψTX1(t)
、ΔψTX2(t)に含めると、以下の式(1.9a)及び(1.9b)が得られる。
【0028】
【数7】
図3は、図2のタイミングチャートに沿って装置を動作させた場合を例に採って、開口合成が成立する条件を示した概念図である。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間Aとも
表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、2Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している。図3から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0029】
換言すれば、2つの測定時間帯[0、Tf]及び[Tf、2Tf]で取得された各復調信
号vTX1RX,n(t)、vTX2RX,n(t)に対して開口合成が成立する条件は、合成時の位相基準を与える送受信アンテナの組合せ(基準パス)における各復調信号vTX1RX,N(t)、vTX2RX,1(t)の位相長が双方の測定時間で一致することである。
【0030】
なお、装置構成や変調方式、或いはタイミングチャートの選択によっては、位相長が等しくなる送受信アンテナの組み合わせは複数存在するケースもあり得る。しかしながら、レーダ装置1では合成後のアンテナ開口が最大となり、且つ、位相長が等しくなる送受信アンテナの組合せは、送信アンテナAT1と受信アンテナARNとのペアと、送信アンテナAT2とAR1とのペアとである。このため、これらの組合せを基準パスの具体例として説明する。また、以降の説明においては、送受信アンテナを識別する際には、例えば、“AT1”を“TX1”、“AR1”を“RX1”と略記することもある。
【0031】
開口合成を行う際には、式(1.9a)及び式(1.9b)における、位相誤差ΔψTX1(t)、ΔψTX2(t)の扱いが問題となる。レーダ装置1における開口合成手法では、最初に、各測定時間に得られたエコー信号に高速フーリエ変換(FFT(Fast Fourier Transformation))を施し、エコー信号を周波数ドメインのデータに変換する。
【0032】
vTX1RX,N(t)を例に取って具体的に示すと、周波数インデックスがk(k=−K/2
+1〜K/2)番目の要素は、以下の式(1.10)で与えられる。このため、m番目の目標に対するFFT結果は、空間位相を除いて式(1.11a)で表される。但し、式(1.11a)の左辺は、下記式(1.11b)のように定義した場合には、式(1.11c)等により得られる。なお、一般性を失わずg0TX1=1とおいて良い。
【0033】
【数8】
以上の考察を踏まえると、上記式(1.9a)及び(1.9b)に示した時間ドメインの信号から変換された周波数ドメイン信号は、以下の式(1.12a)及び(1.12b)のように表わすことができる。
【0034】
【数9】
続いて、信号処理部21は、基準組み合わせに対応する各復調信号を用いて、各周波数インデックスkにおける位相誤差dψ(k)を、下記の式(1.13)を用いて取得する(ここで、基準組み合わせに対して空間位相が等しくなる事に注意)。
【0035】
最後に、信号処理部21では、位相誤差dψ(k)に基づく補正量exp[−jdψ(k)]をVTX2RX,n(k)の全てのn及びkについて掛けることにより、VTX2RX,n(k)の位相誤差をVTX1RX,n(k)の位相誤差ΔψTX1(t)と合わせ、結果、開口合成を成立させていた。即ち、図7のレーダ装置の信号処理部21によって得られる開口合成信号は、下記式(1.14a)及び(1.14b)で示される(簡単の為、加法性雑音成分の影響は省略している)。
【0036】
【数10】
上記式(1.14a)及び(1.14b)のような各信号から被探知目標の角度を推定するためには、基準受信アンテナの各信号の空間位相が等しいことに基づいて、開口合成を実施した後の基準受信アンテナの信号を以下の式(1.15)によって定義する。更に、先に定義した基準受信アンテナの信号と、他の各受信アンテナによって受信された信号とを要素とするベクトルV(k)、雑音信号ベクトルN(k)、角度行列A、及び、目標信号ベクトルX(k)を、以下の式(1.16a)、(1.16b)、(1.16c)、及び、(1.16d)で定義することによって、開口合成された信号に対し、式(1.17)のようなアレー信号処理の基本関係式を導く(言うまでも無いが、各式は周波数インデックスがkである信号要素に関する表記である)。
【0037】
【数11】
図1に示す信号処理部21は、DBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、或いはPRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法のような、既知の角度推定法(測角アルゴリズム)を用いて処理する。
【0038】
上述した比較例では、2個のアンテナを2つの測定時間帯でそれぞれ送信アンテナとして動作させ、N組の受信アンテナで被探知目標からのエコー信号を受信し、これらを空間位相が同じになる基準パスの位相長が等しいと考えて合成する。これによって、2N−1個のアンテナ素子からなる受信アレーアンテナを備えるレーダ装置(探知測距装置)を用
いて同時に信号を受信した様に機能させる(換言すれば、実効開口を拡大する)ことを可能とする。
【0039】
しかしながら、測定位置から同一距離を隔てて複数の被探知対象が存在し、各被探知目標が微少な速度差で運動しているシーン(例えば、レーダ装置を搭載した車両が渋滞に巻き込まれている状態)では、開口合成が上手く機能しない事があった。
【0040】
図4は、シーン設定例を示す図である。以下、図4で示されるシーン設定を用いて、図1で示すレーダ装置の問題点を数式で検証する。図4のシーン設定では、2台の被探知目標T1、T2が、図1のレーダ装置Oから同距離(r1=r2=r)で角度θ1及びθ2の位置に存在し、それぞれ速度v1及びv2で運動している。
【0041】
ここで、計算例で用いたレーダ装置の諸元について記しておくと、発振モジュール22から出力されるシステムリファレンス信号は、キャリア周波数が76ギガヘルツ[GHz](=ωC/2π)、RF−VCOへの変調入力信号(基準信号)の基本周期Tfが4[ms
ec]、片側変調帯域が50[MHz](=Δω/2π)のFMCW信号である。また、ア
ンテナ素子数Nが4、アンテナ素子間隔dが1.8λ(λはキャリア信号の波長)、サンプル数Kが512であるとした。更に、図4のシーン設定における各被探知目標の諸元(距離、角度、速度)をT1:(40[m]、0[deg]、10[km/h])、T2:(40[
m]、3(deg)、11(km/h))と、SNRを30[dB]と仮定した。なお、目
標諸元については、計算例毎に若干変更する事がある。
【0042】
このような各諸元を用いて、比較例に係るレーダ装置1において、先述の手順に従って開口合成操作を行い、周波数ドメインでの測角を行ったところ図5のような結果となった。図5は、比較例に係るレーダ装置1(図1)における測角結果を示すグラフである。図5に示す結果によれば、被探知目標の距離は概ね正確に推定できているものの、0度及び3度にそれぞれ1つずつ存在する被探知目標が1.5度付近に存在する1つの被探知目標として誤推定されている。
【0043】
そこで、このような誤推定の原因を特定するために、上記の合成信号(式(1.17))に逆フーリエ変換を施すことにより当該合成信号を時間ドメインの信号に再変換した後に、この再変換された時間ドメインの信号に測角アルゴリズムを適用した。図6は、図5で利用した周波数ドメインの信号から変換された、時間ドメインの信号に対する測角結果を示すグラフである。DBF、MUSIC及びPRISMの測角結果を示すグラフ(左上グラフ、右上グラフ、左下グラフ)によれば、本来、時間的に不変であるはずの目標角度(図では空間位相φTX1/2,mn(t)の傾きと記している)が時間に応じて変化している。
【0044】
この例では、2つの被探知目標の相対速度差は1[km/h](≒0.28[m/sec])であるから、Tf(=4[msec])時間毎にこの速度差によって生じる被探知目標間
の距離差は約1.1[mm]に過ぎず、装置の距離分解能(≒0.75[m])と比べて遥かに小さな値である。言い替えれば、2つの測定時間を通して、各被探知目標の距離は同じとみなすことができるため、距離遅延によって定まる周波数ωB1及びωB2は、概ね同一の値ωBとなると考えて良い(式(2.1)参照。具体的には、周波数ωB1及びωB2は40[m]で概ね13[kHz]となる)。以上より、上記式(1.9a)及び(1.9b)は以
下の式(2.2a)及び(2.2b)のように書き換えることができる。
【0045】
【数12】
一方、ドップラー周波数に対応する位相及び空間位相について考えると、例えば上記式(2.2a)におけるvTX1RX,n(t)の総和項のexpの括弧内は、下記式(2.3a
)で表わすことができる。この式(2.3a)によれば、時間的に不変の空間位相(n−1)dsin(θm)が、時間に従って変化するドップラー位相推移2vmtと同程度のオーダーとなる(なお、ドップラー周波数は10[km/h]で1.4[kHz]程度である)。
【0046】
この結果、図6に示すように、時間ドメインにおいて角度推定を行った際に観察された現象(時間的に不変であるはずの角度が時間に応じて変化するかの如く振る舞う)が生じると考えられる。このような現象が上述のような問題点(図5で示されるような誤推定)を招いていると考えられる。
【0047】
【数13】
そこで、上述した問題点を解決する手法として、先ず、時間ドメインで信号の位相差をキャンセルすることによって、時間に応じて変化するドップラー位相推移の影響も含めた補正を行うことが考えられる。具体的には、基準組み合わせに対する上記式(2.2)を用い、以下の式(2.4)によって補正量を算出する。そして、vTX2RX,n(t)の全て
のn及びtについて、この補正量を用いたexp[−jdψ(t)]を掛けることで、vTX2RX,n(t)の位相誤差をvTX1RX,n(t)の位相誤差と共通の位相誤差ΔψTX1(t)
に合わせた後、合成開口を行う。
【0048】
【数14】
図7は、このようにして得られた信号に測角アルゴリズムを適用した結果を示すグラフである。図7によれば、時間ドメインで信号の位相差をキャンセルすることにより、予想通り角度の時間変化が打ち消されている。しかしながら、やはり、被探知目標の個数と角度は誤推定されたままである。
【0049】
そこで、上記式(2.2a)及び(2.2b)を見直すと、距離遅延によって定まる周波数が13kHz程度であったのに対して、ドップラー周波数は1.4kHzと10分の1程度である。このため、式(2.2a)及び(2.2b)は、キャリア信号exp(jωBt)に総和記号内の時間変項で振幅変調が掛かっているものと見なせる(勿論、ここ
でいうキャリア信号とは周波数ωcのシステムキャリア信号ではない)。即ち、上記式(
2.2a)において、vTX1RX,n(t)の総和項のみを取り出して整理すると、下記式(
2.5)のように示すことができる。
【0050】
【数15】
式(2.5)の最右辺は、2つの目標からの信号が合成された結果、信号処理部からは、実質上、複素成分exp()と実数成分cos()との積として表せる1つの信号と見えることを意味している。即ち、複素成分は2つの被探知目標の平均ドップラー周波数と平均角度を持つ1つの被探知目標が存在しているかのように振る舞う。また、実数成分からは2つの被探知目標のドップラー信号間のビート成分が発生しており、振幅変調(AM)成分の包絡線となることが分かる。
【0051】
上述の擬似的な単一目標に由来する複素信号に先述のビート信号で振幅変調(AM)が掛かった信号が式(2.5)の実体である。これが、時間ドメインに於いて、位相補正から開口合成を行う事で、角度の時間変化は補正出来たにも拘らず、被探知目標の個数と角度の誤推定までは解決されなかった原因である。なお、元の被探知目標のドップラー信号間のビート信号(AM成分)は、式(2.5)(一般的には、式(1.9)や式(2.2))の包絡線として求められる事は明らかである。
【0052】
図8は、上記の結論の妥当性を検証する為、基準受信アンテナにおける復調信号とこの復調信号にヒルベルト(Hilbert)変換を施して得られた包絡線信号(AM成分)とを併
記したグラフである。各復調信号(式(2.2a)及び(2.2b))は上部に示され、各包絡線信号は下部に示されている。
【0053】
図8によれば、2つの測定時間[0、Tf]、[Tf、2Tf]で得られた受信信号の位
相が包絡線の影響によって大きく異なっていることが表されている。また、各包絡線信号の周波数(バイポーラ信号とみなした時)は、約73Hzであり、装置の最小周波数分解能である500Hzより遥かに小さい。このため、周波数ドメインで位相補正を施しても正確に開口合成ができないことが明らかである。
【0054】
<第1実施形態>
以下、本発明の第1実施形態に係る探知測距装置について説明する。図9は、第1実施形態に係る探知測距装置の具体例であるレーダ装置の構成例を示す。図1に示した比較例と共通な構成要素には、同一の符号を付している。実施形態に係るレーダ装置として、プローブ信号にFMCW(Frequency Modulated Continuous Wave)を採用したレーダ装置
について説明する。レーダ装置は、車両のような移動体に搭載されることが想定されている。
【0055】
図9において、レーダ装置1Aは、比較例と同様の構成を有するアレイアンテナ11、低雑音増幅器(LNA)12、電力増幅器(PWA)13、ミキサ(図9に示すMIX)14、A/D変換器15(一時的にデジタルデータを格納するメモリを実装する様に構成しても良い)、分岐器(ハイブリッド:HYB)16、包絡線検波部(HIL)17、積
分距離計算部(dist(τ))19、データクリッパ(Data Clipper)及び位相補正部(Phase Compensator)20、信号処理部(Data Processing Unit)21、発振モジュール22
、CPU(Central Processing Unit)23、スイッチコントローラ(SW Controller)24、スイッチ(SW)25、送信サイクル設定器(P/Q)26等を有する。これら各ユニットは、ソフトウェアの構成要素又はハードウェアの構成要素、若しくはこれらの組み合わせとしてそれぞれ実現される([その他]の項参照)。
【0056】
発振モジュール22は、DDS(Direct Digital Synthesizer)等、ディジタル的に直接FMCW信号を生成可能な発振器を適用可能である。但し、図9には、一般的なアナログ式の回路構成、即ち、ベースバンド発振器(BB−OSC)と高周波電圧制御発振器(RF−VCO、勿論、電流制御型でも良い)とを組み合わせた発振モジュール22が図示されている。発振モジュール22では、BB−OSCから出力される基準信号がRF−VCOへ送られ、RF−VCOは基準信号によって周波数変調されたシステムリファレンス信号を出力する。基準信号には例えば三角波(図10)が利用される。
【0057】
PWA(HPA)13は、送信アンテナに対応する処理系統に設けられる。図9の例では、送信アンテナとして利用される2つの送信アンテナAT1及びAT2に対応して2つのPWA13(#1)及びPWA13(#2)が設けられている。PWA13は、発振モジュール22から出力されたシステムリファレンス信号を増幅する。PWA13から出力されるシステムリファレンス信号は、送信アンテナとして選択されている送信アンテナAT1及びAT2の一方から目標探知用のプローブ信号として出力される。
【0058】
アレイアンテナ11は、異なる空間位置にそれぞれ配列されたN個のアンテナ(センサ)素子を有する。例えば、アレイアンテナ11は、各アンテナ素子が直線上に等間隔で配列された等間隔リニアアレイアンテナ(ULA(Uniform Linear Array) antenna)を形成する。図9の例では、直線上に配列された各アンテナ素子のうち、両端の2つのアンテナ素子は、送信及び受信の双方に利用(共用)され、それ以外のアンテナ素子は受信専用で利用される。以降、送信及び受信に利用されるアンテナ素子を共用アンテナAR1/T1、
ARN/T2と表記することもある。
【0059】
各共用アンテナ共用アンテナAR1/T1、ARN/T2は、スイッチ25により時分割で送信用又は受信用に切り替えられる。受信用アンテナとして動作するアンテナ素子はAR1からARNと表記され、送信用アンテナとして動作するアンテナ素子はAT1及びAT2と表記される。このように、レーダ装置1Aでは、複数の送信アンテナと複数の受信アンテナとを組み合わせて実効的な受信アンテナの数を拡大させる開口拡大技術が利用される。
【0060】
スイッチ25は、スイッチコントローラ24からの制御信号に応じて、共用アンテナAR1/T1、ARN/T2の夫々を、送信状態と受信状態との間で切り替える。具体的には、共用アンテナAR1/T1は、スイッチ25(#1)によって、PWA13(#1)に接続される送
信状態と、LNA12(#1)に接続される受信状態との間で切り替わる。共用アンテナAR1/T1は、送信状態において送信アンテナAT1として動作し、受信状態において受信ア
ンテナAR1として動作する。同様に、共用アンテナARN/T2は、スイッチ25(#2)に
よって、PWA13(#2)に接続される送信状態と、LNA12(#N)に接続される受信状態との間で切り替わる。共用アンテナARN/T2は、送信状態において送信アンテナ
AT2として動作し、受信状態において受信アンテナARNとして動作する。
【0061】
スイッチコントローラ24は、CPU23から送られて来る送信サイクル情報(P/Q)、及び発振モジュール22のベースバンド発振器から出力される基準信号の周期Tfに
応じて、スイッチ25の切り替えタイミングを制御する。
【0062】
送信サイクル設定器26は、信号処理部21からの要求により基準信号の周期Tf又は
送信サイクル情報(P/Q)の変更指示をCPU23へ送る。送信サイクル情報(P/Q)とは、基準信号の周期Tfを一単位として(但し、個々の共用アンテナを1つのタイム
スロットの中で送受用途に切り替える際のデューティー比は無視)、送信アンテナAT1を利用するタイムスロットの比率(P)と送信アンテナAT2を利用するタイムスロットの比率(Q)とを示す。
【0063】
スイッチコントローラ24は、PTf(=P×Tf)の間、共用アンテナARN/T2を受信
アンテナARNとして用い、共用アンテナAR1/T1を所定の周期で切り替えながら送信アン
テナAT1及び受信アンテナAR1として利用する。また、スイッチコントローラ24は、QTf(=Q×Tf)の間、共用アンテナAR1/T1を受信アンテナAR1として用い、共用アン
テナARN/T2を所定の周期で切り替えながら送信アンテナAT2及び受信アンテナARNとし
て利用する。
【0064】
図10は、送信サイクル情報(P=1、Q=2)を用いた場合の送受信タイミングを示すタイミングチャートである。時間は紙面の左から右に向かって流れている。図10に示す例では、時間[0、Tf]では、送信アンテナAT1は、所定の周期Tfにおいてプローブ信号を放射し、受信アンテナARNは継続的にエコー信号を受信する。測定時間[Tf、3
Tf]では、送信アンテナAT2は所定の時間区間(2Tf)に亘ってプローブ信号を放射し、受信アンテナAR1は継続的にエコー信号を受信する。
【0065】
図10のタイミングチャートを参照し、測定開始時刻を0として、本実施形態に基づく「装置としての動作の1周期」を示すと、タイムスロット[0、PTf]では共用アンテ
ナAR1/T1が共用アンテナとして動作する一方で、アンテナAR2〜ARNが受信アンテナと
して動作する。また、タイムスロット[PTf、(P+Q)Tf]では、アンテナARN/T2
が共用アンテナとして動作する一方で、アンテナAR1〜ARN-1が受信アンテナとして動作する。
【0066】
図9に戻って、LNA12は、受信アンテナに対応する処理系統に設けられる。図9の例では、LNA12(#2)からLNA12(#N−1)は各受信アンテナAR2からARN-1にそれぞれ常時接続される。LNA12(#1)は、スイッチ25(#1)の切り替えにより受信アンテナAR1に接続される。LNA12(#N)は、スイッチ25(#2)の切り替えにより受信アンテナARNに接続される。各LNA12は、接続される受信アンテナからエコー信号(受信信号)を受け、受信信号を増幅する。増幅された信号は、ミキサ14に送られる。
【0067】
ミキサ14(14(#1)〜(#N))は、LNA12に接続される。ミキサ14は、LNA12により増幅された信号を発振モジュール22から送られるシステムリファレンス信号と混合させることにより、受信信号をベースバンド信号に変換する。
【0068】
A/D変換器15は、ミキサ14から出力されるベースバンド信号を所定のサンプリング周波数でディジタルベースバンド信号に変換する。以降、このディジタルベースバンド信号を復調信号と表記することもある。
【0069】
HYB16は、受信アンテナAR1及びARNで受信された信号の復調信号を処理するために、受信アンテナAR1及びARNに対応する各処理系統にそれぞれ設けられる。具体的には、HYB16(#1)はA/D変換器15(#1)に接続され、HYB16(#2)はA/D変換器15(#N)に接続される。
【0070】
言い換えれば、HYB16は、アレイアンテナ11に於いて空間位相が等しくなる送信
アンテナ及び受信アンテナの組み合わせにおける受信アンテナで受信された信号を処理する処理系統に設けられる。従って、HYBとHILとを実装する箇所を、図9に示すようなアレイアンテナの最外縁の受信アンテナに限定する必要はない。開口合成操作は、このように等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせで受信された信号を基準として実行される。以降、このように開口合成の基準として採用される送信アンテナ及び受信アンテナの組み合わせを基準組み合わせと表記し、基準組み合わせにおける送信アンテナ及び受信アンテナを基準送信アンテナ及び基準受信アンテナと表記する。
【0071】
なお、第1実施形態では、基準送信アンテナAT1と基準受信アンテナARNの組み合わせと基準送信アンテナAT2と基準受信アンテナAR1との組み合わせが、最も開口拡大率の良い基準組み合わせとなる。基準組み合わせにおいて送受信される信号の経路は、“基準パス”と呼ばれる。具体的な他の基準組み合わせとしては、基準送信アンテナAT1と基準受信アンテナAR1の組み合わせと基準送信アンテナAT2と基準受信アンテナARNとの組み合わせ等が考えられる。この場合、基準とする位相長はゼロになる。なお、基準組み合わせという語と基準パスという語とを区別しないで用いる事がある。
【0072】
図10のタイミングチャートに従ってレーダ装置1Aを動作させた場合における開口合成が成立する条件は、図3で表すことができる。図3は、基準送信アンテナAT1からプローブ信号が放射され、そのエコー信号がタイムスロット[0、Tf](以降、測定時間A
とも表記する)に於いて基準受信アンテナARNで受信されている様子を示している。更に、図3は、基準送信アンテナAT2からプローブ信号が放射され、そのエコー信号がタイムスロット[Tf、3Tf](以降、測定時間Bとも表記する)に於いて基準受信アンテナAR1で受信されている様子も示している(但し、実際に図3に示してあるタイムスロットBは[Tf、2Tf]である)。
【0073】
図3から明らかな様に、測定時間A及びBのそれぞれで受信された各信号に対して開口合成が成立するのは、測定時間Aに於いて基準受信アンテナARNで受信された信号と、測定時間Bに於いて基準受信アンテナAR1で受信された信号との位相長が一致する場合である。
【0074】
HYB16は、A/D変換器15から出力される復調信号を包絡線検波部17方向とデータクリッパ/位相補正部20方向とに分岐する。包絡線検波部17は、基準受信アンテナで受信されたエコー信号の復調信号を処理するために各HYB16にそれぞれ接続される。包絡線検波部17は、HYB16から入力される復調信号の包絡線成分を検出する。以降、包絡線検波部17で取得した包絡線成分を包絡線信号と表記する場合もある。
【0075】
包絡線検波部17は、例えば、信号処理部21で行われる高速フーリエ変換(FFT(Fast Fourier Transformation))の最小周波数分解能より長い周期(低い周波数)を持
つ信号成分の存在を検出した場合、取得された包絡線信号を積分距離計算部19に送る。なお、包絡線検波部17は、当該フーリエ変換の最小周波数分解能より長い周期を持つ包絡線成分の存在を検出した場合に限り、上述の送信サイクル情報(P及びQ)でのプローブ信号放射をCPU23に要求するように送信サイクル設定器26へ依頼するようにしてもよい(P、Q、及び、Tfの値を変更する事も含む)。なお、包絡線検波部17は、例
えば、ダイオード検波器、直交復調器、ヒルベルト変換器、ウェーブレット変換器、フィルタバンク等を利用して実現される。
【0076】
第1実施形態では、包絡線検波部17には、ヒルベルト変換器が適用されている。ヒルベルト変換器は、複素信号の実数成分のみからなる信号(実際に測定される復調信号は全て実数である)に対するヒルベルト変換を行い、虚数成分を求める。これによって、複素信号(解析信号)が得られる。その後、ヒルベルト変換器は、実数成分の自乗と虚数成分
の自乗との和の平方根をとる。
【0077】
もし、ミキサ14、或いはA/D変換器15の出力がI/Q(同相/直交)成分に分離されているならば、包絡線は計算式“sqrt[I2(t)+Q2(t)]”(すなわち、I2(t)+Q2(t)の平方根)によって簡易に求めることができる。この場合、ヒルベルト変換の操作は不要となる。なお、得られた包絡線に対しては、適宜、雑音除去のための平滑処理が行われる。また、信号処理部21による開口合成時の位相補正では、unwrap処理が施される。
【0078】
データクリッパ/位相補正部20のデータクリッパは、各タイムスロットに於いて各受信アンテナで受信された信号の復調信号を各A/D変換器15からそれぞれ受け、それぞれメモリに保持する(即ち、このメモリは上述した「装置としての動作の1周期」に得られるA/D変換器15からの出力をタイムスロット毎及び受信系(アンテナ〜A/D変換器)毎にアクセス可能な形で保存しておく事ができ、更に、後述の各操作に於いては所望のタイムスロットに於ける所望の受信系からのデータが、適切に出力する事ができるものとする)。
【0079】
データクリッパは、積分距離計算部19から送られた遅延量に基づいて、入力された各復調信号の包絡線成分の位相を合わせる。具体的には、データクリッパは、[Tf、3Tf]間の各復調信号から当該遅延量以降のTf時間分の信号をそれぞれ切り出す。これによ
り、[0、Tf]間の各復調信号と包絡線の位相が一致するデータを、[Tf、3Tf]間
の各復調信号から取得することができる(即ち、異なるタイムスロットに於いて取得したデータ列から、包絡線の位相が一致したデータ列を得られる)。データクリッパは、このように位相補正された各復調信号を位相補正部へ送る。
【0080】
データクリッパ/位相補正部20の位相補正部は、データクリッパから送られて来る包絡線成分の位相が揃った各復調信号を受け(なお、ここで用いた具体例に於いて、データクリッパから送られてくるデータの長さは、タイムスロット[0、Tf]のそれと同じで
ある)、これら各復調信号の残留位相誤差を補正する。具体的には、各回路素子の特性バラツキ等も含めてベースバンド信号に含まれる残留位相誤差の影響をキャンセルするために、式(2.4)を用いて(時間ドメインに於ける)補正量を算出し、この補正量に応じて、データクリッパで包絡線の位相が合う様に切り取られた測定時間[Tf、3Tf]における各復調信号の位相誤差を他の測定時間[0、Tf]での各復調信号の位相誤差にあわ
せるように補正する(但し、包絡線の位相を揃えたデータであれば、時間ドメインのデータにFFTを掛けて周波数ドメインのデータに変換し、式(1.13)式で補正量を算出し、周波数ドメインに於いて上述の様な補正処理を実施しても良い)。このように残留位相誤差の補正が行われた各信号は、信号処理部21へ送られる。
【0081】
信号処理部21は、データクリッパ/位相補正部20から送られる各信号を開口合成し、開口合成された信号にDBF(Digital Beam Forming)法、MUSIC(MUltiple SIgnal Classification)法、PRISM(PRopagator method based on an Improved Spacial-smoothing Matrix )法等のような既知の角度推定アルゴリズム(以降、単に測角アルゴリズムと表記する)を適用する。なお、時間ドメインで開口合成された信号をフーリエ変換(FFT(Fast Fourier Transformation))等により周波数ドメインの信号に変換
し、この周波数ドメインの信号に対して測角アルゴリズムを適用するようにしてもよい。開口合成手法及び測角アルゴリズムは周知の技術を用いればよいため、ここでは説明を省略する。なお、信号処理部21は、測角アルゴリズムにおいて、自己相関成分を含まない相関行列を用いるようにしてもよい。
【0082】
また、信号処理部21は、包絡線検波部17から包絡線そのものの周波数、乃至、この
包絡線を構成する信号成分の個々の周波数の情報を取得し、所定の方法により包絡線成分(或いは、上記の各量)を取得するようにしてもよい。この場合、信号処理部21は、この周波数成分(或いは、上記の各量)が所定閾値より小さい場合には、送信サイクル設定器26から基準信号の周期Tfを変更する指令を出すようにしてもよい。
【0083】
ところで、比較例に関して明らかにした様に、同一距離に存在する複数の被測距目標が小さな速度差で運動している場合、ドップラー周波数の差分の周波数を持つ振幅変調(AM)成分が発生する。ドップラー周波数の差分の周波数が信号処理部(Signal Processing Unit)21で利用する第1の周波数分析部(例えばFFT)の解像度より小さい場合には、周波数ドメインに於ける位相補正法では開口合成が適正に行われない。時間ドメインで補正を行っても、十分な開口合成結果が得られないことがあった。
【0084】
そこで、第1実施形態では、基準パスの信号を包絡線検波部17によって監視する。監視において、第1の周波数分析部の最小周波数分解能より長い周期を持つ包絡線成分が存
在した場合には、TX1(送信アンテナAT1)からPTf時間、TX2(送信アンテナAT2)からQTf時間(P,Q∈Z)プローブ信号を放射する。
【0085】
積分距離計算部19は、TX1及びTX2の夫々に対応する基準パスの包絡線位相が一致するまでのタイムラグを検出する。具体的には、積分距離計算部19は、パラメータτに関して積分距離dist(τ)を計算し、積分距離が最小となった際のパラメータτの値を以て包絡線位相が一致するまでのタイムラグが検出されたものとする。
【0086】
そして、データクリッパ/位相補正部20におけるデータクリッパによって、TX1又はTX2(例えばTX1)の位相を基準として、上述のタイムラグからTX2のプローブ信号による各受信アンテナのデータ(復調信号)をTf時間分切り出し、基準パスの包絡
線成分も含めた復調信号について、位相補正部で位相補正が行われる。
【0087】
上記した積分距離計算部19、データクリッパ/位相補正部20による操作でも適正な開口合成結果が得られない程度にドップラー周波数の差分周波数が小さい場合には、プローブ信号の送信サイクル設定器(P/Q)26からRF−VCOへの変調入力信号の周期Tf自体を変更する指令(制御命令)が出力される。制御命令は、例えばCPU23から送信サイクル設定器26へ出力することができる。但し、制御命令の出力ソースはCPU23に限られず、データクリッパ/位相補正部20や信号処理部21、或いは他の制御装置から出力することができる。また、図9の例では、データクリッパと位相補正部とが同一のブロックで表されているが、これらは異なるハードウェアチップで実現されることができる。
【0088】
或いは、P及びQの少なくとも一方の値を大きくする制御信号が出力されるようにしても良い。P及びQの少なくとも一方を大きくする程度は、最小差分周波数の逆数に比例した観測時間が要求される。このため、具体的な値は、レーダ装置1Aを搭載した車両(移動体)の走行環境に応じて設定される。P,Qの値は、特に、料金所や交差点等の渋滞箇所では非常に大きくなると考えられる。制御命令の出力トリガは、レーダ装置1Aのユーザによるマニュアル操作、或いは、車両(移動体)に搭載された走行環境を検知するセンサ(例えば、レーダを搭載する車体に装備された速度計で検出される移動速度、GPSやDSRC等のインフラベースの環境情報提供装置)に応じて発せられるようにすることができる。
【0089】
図11は、探知目標数を3とし、各目標T1,T2,T3の諸元が、T1(40[m]、0[deg]、10[km/h])、T2(40[m]、3[deg]、11[km/h])、T3:(40[m]、6[deg]
、12[km/h])、信号対雑音比(SNR)=30[dB]である場合において、図9のレーダ
装置1Aを図10のタイミングチャートに従って動作させたときの各基準パスのエコー信号とその包絡線を示す。図11中の左側に、送信アンテナTX1に対する基準パスのエコー信号(復調信号)(上段)及び包絡線(下段)を示し、図11中の右側に送信アンテナTX2に対する基準パスのエコー信号(復調信号)(上段)及び包絡線(下段)を示す。図11の例では、計算の簡易化のため、TX1に対する基準パスのエコー信号にゼロパディングを行い、TX2に対する基準パスのエコー信号のデータ長を一致させている。
【0090】
図12は、図11に示した包絡線の位相が一致するタイムラグを、基準パスの復調信号の包絡線vTX1,envRX,N(t)、vTX2,envRX,1(t)の積分距離の最小値から計算した例である(但し、以降の積分距離の計算例では、見易くする為、平均操作を行う前の値で示している)。積分距離dist(τ)は次式(3.1a)で与えられる。dist(τ)の計算は、図9に示した積分距離計算部19で実行される。なお、メモリの節約等を目的として利用するタイムスロットを[0、Tf]の1区間分に限定したい場合は、式(3.1b)を式(3.1b)の代わりに利用しても良い。
【0091】
【数16】
また、本発明の実施形態の本質は、復調信号の包絡線vTX1,envRX,N(t)、vTX2,envRX,1(t)を時間の関数と見なした時に、この2つの関数間の距離が最小となる時間区間を見つける事である。このため、タイムスロットの占有時間やその順番に合わせた各種の場合分けや付帯操作 ― 例えば、積分区間の設定や、距離計算を行う上でvTX1,envRX,N(t
)、vTX2,envRX,1(t)の存在する時間区間を合わせる操作(PTf、乃至、QTfの加
算/減算)、或いは、平均操作等(積分区間の幅での除算)等 ― は、装置上で式(3.1a)をどの様に実装するかによって適宜決めれば良い。この意味でP≠Qなる場合、不足するデータ分をゼロパディングによって補えば、積分距離の演算自体は、一般的な関数間で積分距離を求める単一の式で事足りる。
【0092】
図13は、図12で検出されたタイムラグ(Lag)に基づいて、図11に示した信号vTX2RX,1(t)の全区間に渡るデータ(復調信号及び包絡線)から、Lag+[0、Tf]に該当する区間を切り出したグラフ(右側)と、[0、Tf]に於ける復調信号vTX1RX,N
(t)及び包絡線のグラフ(左側)とを示す。図13に示すように、包絡線の位相が揃っ
たデータ(信号)が得られている。このような位相を揃える操作は、図9に示したデータクリッパ/位相補正部20におけるデータクリッパによって実行される。
【0093】
図14は、図13に示した基準パスの信号を用い、復調信号vTX2RX、n(t)に対して図9のデータクリッパ/位相補正部20における位相補正部で位相補正を行い、信号処理部21において開口合成を行い、合成された信号にFFTを施し、周波数ドメインで測角を実施した結果を示す。位相補正は、上記した式(2.4)に基づいて実行される。図14に示すように、既存の超分解測角手法であるMUSICやPRISMと、上記したような基準パス信号の包絡線の位相が一致するタイムラグを用いた位相補正手法との組合せによって、好適
な推定が実現されていることが分かる。
【0094】
上述した位相補正手法を適用した別の計算例を図15〜18に示す。別の計算例では、各目標諸元がT1(40[m]、0[deg]、10[km/h])、T2(40[m]、3[deg]、10.1[km/h])、T3(40[m]、6[deg]、11[km/h])、SNR=30[dB]である。また、レ
ーダ装置1AにおけるP,Qの値がP=1,Q=30に設定されている。さらに、レーダ装置1Aは、図10に示したタイミングチャートに従って動作した。
【0095】
相対速度差の最小値が僅か0.1[km/h]=0.028[m/sec]、即ち、周期Tf毎に生じる目標の距離差が僅か0.11[mm]という微少摂動に対しても、レーダ装置1Aにおける位相補正方法の有効性が示された。因みにこの距離変動は、直接スペクトラム拡散型のレーダを用いても検出困難である(具体的には、占有帯域が1GHz程度で10cmの距離差しか検出できない)。この事実は、超広帯域探知測距装置でも困難な微少距離の測定が実施形態のレーダ装置によって実現されている事をも表している。
【0096】
上記の位相補正手法は、複数の距離に相対速度が近接した複数の被探知目標が存在する場合でも対応可能である。以下にその理由を示す。例えば、距離r1に目標T1(r1、θ1、v1)、目標T2(r1、θ2、v2)が存在し、距離r2に目標T3(r2、θ3、v3)、目標T4(r2、θ4、v4)が存在する場合を考える。
【0097】
このとき、目標T1,T2の距離r1によって定まる周波数はωB1≒ωB2=ωB1と定義で
きる。また、目標T3,T4の距離r2によって定まる周波数はωB3≒ωB4=ωB3、と定義
できる。このため、各目標の角度によって定まる空間位相をφTX1/2,mn、速度によって定まるドップラー周波数をωcμm(m=1〜4)と定義すれば、TX1からのプローブ信号をn番目の受信アンテナで受信して得られるベースバンド信号は以下の式(3.2)で表すことができる(簡単の為、片側のTXだけについて示す)。
【0098】
【数17】
ここで、空間位相は時間不変であるから、見通しを良くする為、以下の式(3.3a),(3.3b),(3.3c)のようにベクトルμ,ベクトルφ,合成包絡線A(t:μ,φ)を表し、さらに時変項に注目して以下の式(3.4a)及び(3.4b)のように表す。
【0099】
【数18】
すると、式(3.2)は、次の式(3.5)に書き換えることができる。
【0100】
【数19】
即ち、基準パスの信号も含め、TX1からのプローブ信号に対して各受信アンテナから得られるエコー信号は、(ωB1+α1+ωB3+α3)/2なる周波数を持つ合成ベースバンド信号を合成包絡線A(t:μ,φ)で変調した信号となる。
【0101】
図19は、上記の数学的説明を模式的に示した図で、或るタイムスロットでTX1からプローブ信号を送信して得られた目標からのエコー信号の等位相面と、別のタイムスロットでTX2からプローブ信号を送信して得られた目標からのエコー信号の等位相面との関係を、基準パスとの関係で示している。
【0102】
この様に、2つのタイムスロットに於けるエコー信号の等位相面は合成包絡線をそれぞれの半径(図16からも明らかな様に、一般的に各合成包絡線の極座標上に於ける軌跡は単純な円や楕円とはならないが、目標数や諸元等が急激に変化しない限り、異なるタイムスロット間で測定した基準パスの位相が揃う時間帯が必ず存在する ― この前提が崩れた場合、空間平均を含む角度推定の前処理等も全て無効になる)として位相関係が時間に沿って回転していると考える事ができる。即ち、この2つの等位相面を合成するには、2つの発想がある。第1には、基準パスの信号の内積が最大となる遅延時間を探すことであり、第2には、基準パスの信号の差分が最小になる遅延時間を探す事である。第1実施形態における位相補正方法では、後者の発想を採用している。
【0103】
後者の発想では、積分距離を与える式(3.1a)に於いて、基準パスの信号vTX1,envRX,N(t)、vTX2,envRX,1(t)は異なるタイムスロットに於いて取得されたものであるから、信号の位相が一致した後に残留する成分は各々相関の無い雑音成分となる。即ち、基
準パスの位相が一致した時の積分距離は雑音電力と等しくなる。従って、基準パスの位相合成を判定する閾値として、積分距離が無信号時の雑音電力と概ね等しいか否かといった定量的な基準を採用することができる。
【0104】
図20は、別の計算例で示したような状況に於いて成立することを実証する計算例である。条件は、距離40mに目標T1(0[deg]、10[km/h])、T2(3[deg]、11[km/h])が存在し、距離60mに目標T3(−3[deg]、12[km/h])、T4(−6[deg]、13[km/h])が存在していると仮定している。図20によれば、明らかに、4つの目標に対して開口合成が成立していることが分かる。
【0105】
第1実施形態によるレーダ装置1Aによれば、TX1とTX2とに対応する基準パスの包絡線情報から、各測定時間に於いて開口合成が成立するデータ(信号)の位相を揃えることで、任意の状況に於いて実効的な受信センサの個数を増加させ、小型で多くのセンサを備えた探知測距装置を実現することができる。従って、実際の受信センサ数で分離可能な数より多くの目標に対して、精度の良い角度推定性能を発揮できる。
【0106】
また、第1実施形態によるレーダ装置1Aによれば、単純な回路で開口合成を確立することが可能である。もっとも、レーダ装置の応答速度を向上させる為には、周波数毎に処理するのが望ましい。
【0107】
<第2実施形態>
図21は、本発明の第2実施形態に係る探知測距装置(レーダ装置1B)を示す図である。第2実施形態は、第1実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0108】
レーダ装置1Bがレーダ装置1Aと大きく異なる箇所は、以下の点である。(1)少なくとも1つの基準パスの包絡線検波部17(図21では17(#2))の手前に、分岐器(HYB)30が配置され、第2の周波数分析部として配置された周波数分析部(f_analyzer)31と接続されている。(2)各受信アンテナに対応するベースバンド信号径路上に、中心周波数が可変のBPF(Band Pass Filter)32が設置されている。具体的には、各BPF32は、A/D変換器15とHYB16との間、又はA/D変換器15とデータクリッパ/位相補正部20との間に配置されている。
【0109】
レーダ装置1Bでは、周波数分析部31が基準パスの受信信号の復調信号(図22では、受信アンテナARNの復調信号)に対するフーリエ変換を行い、ベースバンド信号(復調信号)を構成する周波数を分析し、分析結果に基づいてN個の受信アンテナに対応するBPF32の中心周波数を制御する。包絡線検波部17は、BPF32によって帯域分割された各基準パスの受信信号(復調信号)に包絡線検波を施す。積分距離計算部19は、包絡線間の積分距離を求め、最小の距離値を与える遅延量(τ)から帯域毎の基準パス間の位相補正量を求める。データクリッパ/位相補正部20は、位相補正量を用いて包絡線も含めた当該帯域内の信号の全ての受信信号の位相を揃え、信号処理部21での開口合成機能を実現する。
【0110】
なお、BPF32の処理系列がN個の受信アンテナ毎に1つである場合には、上記した遅延量(τ)を求め、開口合成を行う操作を分割された帯域分だけ繰り返すことが要求される。よって、周波数分析部31及び中心周波数可変BPF32との組み合わせは、フィルタバンクで代用することができる。
【0111】
<第3実施形態>
図22は、本発明の第3実施形態に係る探知測距装置(レーダ装置1C)を示す図であ
る。第3実施形態は、第1、第2実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0112】
レーダ装置1Cがレーダ装置1A(図9)と大きく異なる箇所は、以下の通りである。(1)レーダ装置1Bと同様に、少なくとも1つの基準パスの包絡線検波部17(図22では17(#2))の手前に、分岐器(HYB)30が配置され、第2の周波数分析部である周波数分析部(f_analyzer)31Aと接続されている。(2)個々の基準パスの信号をLPF(Low Pass Filter)32かスルーラインかを介して、HYB16及び包絡線検
波部17に通す経路が設置されている。
【0113】
レーダ装置1Cの動作は、以下の通りである。すなわち、周波数分析部31Aによって、基準パスの受信信号の復調信号(図22では、受信アンテナARNの復調信号)の周波数成分を分析する。周波数分析結果が、復調信号(ベースバンド信号)から距離及び速度を求めるための信号処理部21に含まれる第1の周波数分析部の最小分解能以下の周波数成分を含んでいた場合には、周波数分析部31Aは、LPF33及びスルーラインの両端に設けられたスイッチを制御して、基準パスの復調信号がLPF33に入力される状態にする。なお、対象の周波数成分を含まない場合には、周波数分析部31Aは、復調信号がスルーラインを通過する状態とする。
【0114】
LPF32又はスルーラインを通過した基準パスの復調信号に対する以降の処理は、第1実施形態と同様である。各LPF33の遮断周波数は、第1の周波数分析部の最小分解能以下の周波数が設定される。周波数分析部31が第1の周波数分析部の最小分解能以下
の信号成分を検出しなかった場合には、周波数分析部31は、各基準パスの信号を、LPF33を介さず、そのまま包絡線検波器17に送出する。このように、周波数分析部31Aは信号径路のスイッチング動作を制御する。従って、本実施形態に於いて信号がスルーライン側から供給された場合、開口合成は包絡線を用いた時間領域で実施しても、比較例と同様にフーリエ変換を用いた周波数領域で実施しても良い。
【0115】
<第4実施形態>
次に、本発明の第4実施形態に係る探知測距装置(レーダ装置1D)について説明する。第4実施形態は、第1実施形態に係るレーダ装置1A(図9)と共通点を有するので、主として相違点について説明し、共通点については説明を省略する。
【0116】
第1〜第3実施形態では、図面をコンパクトにする為、アレーアンテナの最外縁に送信/受信共用アンテナ(センサ)を1つずつ配置し、両者に挟まれた空間に受信専用アンテナ(センサ)を配置した構成を装置の具体例として用いてきた。もっとも、送信/受信用(或いは送受共用)センサ(アンテナ)の数は適宜設定可能である。また、送信用センサの配置も、受信用センサ(受信アンテナ)と共用にする必要は無く、お互いに空間的に異なる位置に設置可能である。
【0117】
図23は、第4実施形態に係る探知測距装置(レーダ装置1D)の構成例を示す図であり、図24は、図23のレーダ装置1Dのタイミングチャートである。図23に示すレーダ装置1Dは、レーダ装置1A(図9)における共用アンテナの代わりに、送信専用の送信アンテナAT1,AT2と、受信専用の受信アンテナAR1からARNが設けられている。
【0118】
すなわち、レーダ装置1Dは、受信のためにのみ利用される受信アンテナAR1からARNと、送信のためにのみ利用される送信アンテナAT1及びAT2と、を含むアレイアンテナ11Aを持つ。
【0119】
送信アンテナAT1,AT2には、PWA13が夫々接続されており、各PWA13の入力
端の一方には、スイッチ25Aを介してOSCモジュール22からのシステムリファレンス信号が入力されるようになっている。スイッチ25Aの切替制御は、スイッチコントローラ24によって実行される。送信/受信共用アンテナの代わりに、専用の送信アンテナを設けた事で、装置寸法という面では不利になるが、受信信号利得という面では性能向上が期待できる(図24参照)。
【0120】
第4実施形態では、各受信アンテナの間隔をdに設定した場合、各送信アンテナの間隔は(N−1)×dに設定する。これにより、例えば、送信アンテナAT1と受信アンテナAR1との組み合わせと、送信アンテナAT2と受信アンテナARNとの組み合わせが基準組み合わせとなる。
【0121】
このように、送信アンテナは、受信アンテナと空間的に別の位置に設置可能である。更に、センサ間隔(アンテナ間の間隔。図23中の距離d)が等間隔であることは要求されない。以上の点を除き、第4実施形態は第1実施形態と同様の作用効果を奏する。なお、第4実施形態に係るアンテナアレイ11Aに係る構成は、第2、第3実施形態に適用してもよい。
【0122】
<変形例>
第1〜第4の実施形態で説明したように、実施形態に係るレーダ装置は、包絡線検波部17で基準パスの包絡線の位相を監視し、最小の包絡線の積分距離を積分距離計算部19で求めて如何なる目標に対しても開口合成が破綻しない様な補正を行う。
【0123】
したがって、包絡線の周波数がフーリエ変換を用いて検知できる程十分高い場合には、第1〜第4実施形態におけるレーダ装置1A〜1Dに於ける補正手法を比較例(図1)で採用していた補正手法に切り替えるようにしてもよい(包絡線の周波数が高い場合には、例えば、レーダ装置1Aでは、積分距離計算部19から概ね同じ大きさを持つローカルマキシマム(或いは、ローカルミニマム)が何度も周期的に出現するので簡単に判定することができる。
【0124】
これ以外に合成を行う上で注意の必要な状況は、(3.2)式に空間位相項を組み込んだ
次式(4.1)から判明する様に、空間位相とドップラー成分による位相とが等しくなってしまった場合であり、この時には、サンプリング周波数を変更する、不等間隔サンプリングを行う、被探知目標が正常に検出されていた時点に得られた目標諸元の値からカルマンフィルタ等の手段で予測される値を用いる、測定時間を所定時間ずらす、或いは、開口合成を行わないで測角を行う等、動作モードを切り替えるようにしてもよい。
【0125】
【数20】
或いは、距離遅延によって定まる周波数ωBを先に検出し、vTX1/2RX、n(t)にexp(-jωBt)を掛けて式(4.1)の成分を復調、或いは、全てのvTX1/2RX、n(t)に包絡線検波を施せば、再び式(1.17)と同じ形の式に書き直せる。したがって、エコー信号が恰もドップラーのみから構成されるかの如くに扱う事で角度推定処理が可能となる(装置構成上の観点から言うと、この方式は実施例4を敷衍した発想である)。
【0126】
但し、各信号に包絡線検波を施して得られる信号とは、|HIL(vTX1/2RX、n(t))|で
あるから、角度スペクトラムがピークを示す目標の角度は実際の値と符号が反転している事に注意する必要がある(言い替えれば、各信号に包絡線検波を施して得られる信号は、100%変調に近い為、信号の絶対値に対して角度推定を行うこと、或いは、時間ダイバーシティによって開口合成を実現していることになる)。
【0127】
[その他]
〈ハードウェアの構成要素(Component)及びソフトウェアの構成要素(Component)について〉
ハードウェアの構成要素とは、ハードウェア回路であり、例えば、フィールド・プログラマブル・ゲートアレイ(FPGA)、特定用途向け集積回路(ASIC)、ゲートアレイ、論理ゲートの組み合わせ、信号処理回路、アナログ回路等がある。
【0128】
ソフトウェアの構成要素とは、ソフトウェアとして上記処理を実現する部品(断片)であり、そのソフトウェアを実現する言語、開発環境等を限定する概念ではない。ソフトウェアの構成要素としては、例えば、タスク、プロセス、スレッド、ドライバ、ファームウェア、データベース、テーブル、関数、プロシジャ、サブルーチン、プログラムコードの所定の部分、データ構造、配列、変数、パラメータ等がある。これらソフトウェアの構成要素は、コンピュータ内において、1又は複数のメモリ上で実現されるか、或いは、1又は複数のメモリ上のデータが1又は複数のプロセッサ(例えば、CPU(Central Processing Unit)、DSP(Digital Signal Processor)等)で実行されることにより実現さ
れる。
【0129】
なお、上述の各実施形態は、上記各処理部の実現手法を限定するものではない。上記各処理部は、上記ハードウェアの構成要素又はソフトウェアの構成要素若しくはこれらの組み合わせとして、本技術分野の通常の技術者において実現可能な手法により構成されていればよい。
【0130】
上述した第1から第4の実施形態は、以下の態様を含むことができる。
【0131】
《態様1》
U個のセンサ素子から構成される送信用センサアレイと、N個のセンサ素子から構成される受信用センサアレイとを利用し(送信センサと受信センサとは共用でも良い、以下同様)、各送信センサから放射されたプローブ信号が被探知目標によって反射される事で生じるエコー信号(以下、受信信号)を各受信センサで測定し、空間位相が等しくなる送/受信センサの組み合わせで構成される基準パスの位相を用いて開口合成を行い、合成された信号から目標の角度を推定する装置、特に探知測距装置Aにおいて、
各基準パスで得られる受信信号に包絡線検波を施し、それらの積分距離を求め、最小の距離値を与える遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする装置、及び手法。
【0132】
《態様2》
態様1における探知測距装置Aにおいて、装置の変調方式の基本周期、例えば、FMCW装置ではRF-VCOへの変調入力信号の周期:Tfに対し、u番目の送信センサからQuTf時間ずつ
プローブ信号を放射し(Qu∈Z、u=1〜U)、N個の受信用センサは送信時間に対応する時間の信号を受信して各基準パスの信号を包絡線検波し、必要性があれば、max(QuTf)に満
たない受信信号については不足分をゼロパディングして全ての受信信号のデータ長を合わせた上で、基準パスの包絡線の積分距離を求め、最小の距離値を与える遅延量からカウン
トしてmin(QuTf)時間分の信号を切り出す事で包絡線も含めて全ての受信信号の位相を
揃え、目標の状況と無関係に開口合成を実現する事を特徴とする装置、及び手法(特に、min(QuTf)としてTfを採用しても良い)。
【0133】
なお、遅延量に沿って積分距離を求めていった結果、複数の箇所に最小値に極めて近いローカルミニマムが現れる場合もあり得るが、この場合、最も小さな遅延量に対応するローカルミニマムを信号切り出しの基準点として採用する。実用的には最小値はノイズレベル程度になるので、無信号時の雑音レベルをメモリ等に保持しておき、この値を閾値として最小値の判定を行う。
【0134】
更に、最初の遅延量に対して位相合成が成立しない場合は、例えば、目標数の急な変化等の走行環境の変化が合成の阻害要因として考えられるので、次に小さい遅延量を信号切り出しの基準位置として用いるか、開口合成を行わずにDBF等の角度分解能が粗い方式の利用、或いは、インフラベースの走行環境情報提供装置の利用を以て環境情報の把握を行い、装置パラメータ(タイムスロット長Qu,変調入力信号の周期Tf等)の調整を行った後に、再度開口合成を実施する様にしても良い。
【0135】
《態様3》
態様1における探知測距装置Aにおいて、各基準パスで得られる受信信号に包絡線検波を施し、各基準パスの包絡線の自己相関の和と各基準パス間の包絡線間の相互相関の和との差分を求め、この差分が最小となる遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする態様1、2に記載の装置、及び手法。
【0136】
なお、各基準パスの自己相関はそのパスを構成する受信センサに於ける着信信号電力に他ならないので、自己相関を求める代わりに自乗検波器等の回路的手段で置き換えても良い(積分距離の定義の仕方によって必要な場合、平均操作等の付帯操作は実装状況に応じて、適宜、ハードウェア/ソフトウェア的に実現すれば良い)。
【0137】
《態様4》
態様1における探知測距装置Aにおいて、1つの適当な送信センサ:u0に対応する基準
パスに設けた第2の周波数分析部によって、該基準パスの受信信号の周波数成分を分析し
、この周波数分析の結果に基づいて、第2の周波数分析部は、N個の受信センサに設けた中心周波数可変BPF(Band Pass Filter)の中心周波数を制御し、帯域分割された各基準パ
スの受信信号に包絡線検波を施し、それらの間の積分距離を求め、最小の距離値を与える遅延量から帯域毎の基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めた該帯域内の信号の全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする、態様1〜3に記載の装置、及び手法。
【0138】
なお、装置の構成としてBPFの処理系列がN個のセンサ毎に1つである場合は、上記遅延
量を求め、開口合成を行う操作を分割された帯域分だけ繰り返す。よって、周波数分析部と中心周波数可変BPFとの組み合わせは、フィルタバンクで代用しても良い。
【0139】
《態様5》
態様1における探知測距装置Aにおいて、1つの適当な送信センサ:u0に対応する基準
パスに設けた第2の周波数分析部によって、該基準パスの受信信号の周波数成分を分析し
、この周波数分析の結果が、ベースバンド信号から距離/速度を求める為の信号処理手段で利用する第1の周波数分析部の最小分解能以下の周波数成分を含んでいた場合、前記第2の周波数分析部は、各基準パスに設けたLPF(Low Pass Filter)を介して各基準パスの信号をLPFの後段に設けた包絡線検波器に送り、各包絡線検波器から出力された信号間の積
分距離を求め、最小の距離値を与える遅延量から基準パス間の位相補正量を求め、この補正量を用いて包絡線も含めて全ての受信信号の位相を揃え、目標の状況と無関係に開口合成機能を実現する事を特徴とする、態様1〜3に記載の装置、及び手法。
【0140】
なお、各LPFの遮断周波数は、第1の周波数分析部の最小分解能以下の周波数であるものとし、第2の周波数分析部が第1の周波数分析部の最小分解能以下の信号成分を検出しなかった場合は、前記第2の周波数分析部は各基準パスの信号を、LPFを介さず、そのまま包絡線検波器に送出するものとする、即ち、第2の周波数分析部は信号径路のスイッチング動
作を制御する。
【0141】
《態様6》
各目標の走行速度等に関する情報を、車々間通信、或いは、路上中継器や管制センター等のインフラを利用して授受する事で、開口合成を行う為に必要なデータを取得するまでの測定時間(∽1/包絡線に含まれる最小周波数)を予測し、必要なタイムスロットの長
さを定める事で応答速度を改善する事を特徴とした様態1〜3に記載の装置、及び手法。
【0142】
更に、上記の各手段によって取得した測定時間の予測値を、第2の周波数分析部による
フィルタ制御を実施する際の参照値として利用する事で応答速度を改善する事を特徴とした、態様4、5に記載の装置、及び手法。
【0143】
《態様7》
各基準パスの受信信号に包絡線検波を施し、それらの位相を揃える為に積分距離を求めても妥当且つ明確な最小値(実装システムに於ける無信号時の雑音電力レベル程度)が得られない場合、各送信センサからのプローブ信号送信時間:QuTf、或いは、装置の変調方式の基本周期:Tfを変更する事を特徴とする態様1〜6に記載の装置、及び手法。
【0144】
なお、装置の距離分解能等、他の性能を劣化させない為に、装置の占有帯域ΔωもTf
に連動させて変更しても良い。更に、この様な処置を施しても開口合成が成立しない場合、U個の送信センサの一部のみを用いる様にしても良い。
【0145】
《態様8》
基準パスを構成する受信センサを含め、全ての受信センサによる受信信号に包絡線検波を施し、開口合成後に得られる各受信センサの包絡線信号そのものに対して角度推定アルゴリズムを適用する事を特徴とした、態様1〜7の探知測距装置。
【符号の説明】
【0146】
1,1A〜1D レーダ装置
11 アレイアンテナ
12 低雑音増幅器(LNA)
13 電力増幅器(PWA)
14 ミキサ
15 アナログデジタル(A/D)変換器
16、30 分岐器(HYB)
17 包絡線検波部(HIL)
19 積分距離計算部(dist(τ))
20 データクリッパ/位相補正部
21 信号処理部
22 発振モジュール
23 CPU(Central Processing Unit)
24 スイッチコントローラ
25 スイッチ
31,31A 周波数分析部
32 中心周波数可変バンドパスフィルタ(BPF)
33 ローパスフィルタ(LPF)
【特許請求の範囲】
【請求項1】
目標を探知するレーダ装置において、
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、
各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、
前記包絡線検波部により取得された各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、
前記決定部で決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部と、
を含むレーダ装置。
【請求項2】
前記各送信アンテナからの信号放射を所定変調方式のための基準信号の周期に対応した各送信サイクル時間で順次切り替える制御部を更に備え、
前記包絡線検波部は、前記各基準パスにおける受信アンテナで受信される、前記各送信サイクル時間に対応する時間の各受信信号の包絡線をそれぞれ取得し、
前記決定部は、前記包絡線検波部で取得された各包絡線の時間長を揃えた後、各包絡線間の最小の積分距離を与える遅延量を求め、
前記位相補正部は、前記各受信アンテナからの受信信号における前記決定部で決定された遅延量分遅延させたタイミングから前記各送信サイクル時間のうちの最小時間分の信号を抽出することにより位相補正を行う、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
基準パスの1つ以上を形成する受信アンテナから受信される受信信号の周波数分析を行う周波数分析部と、
前記各受信アンテナで受信された受信信号のうち、前記周波数分析部の周波数分析結果に応じた中心周波数を持つ所定帯域で透過させるバンドパスフィルタと
をさらに含む請求項1又は2に記載のレーダ装置。
【請求項4】
基準パスの1つ以上を形成する受信アンテナから受信される受信信号の周波数分析を行う周波数分析部と、
前記受信信号が所定閾値以下の周波数成分を含む場合に、各基準パスにおける受信信号が通過するローパスフィルタと
を更に含む請求項1又は2に記載のレーダ装置。
【請求項5】
前記決定部で妥当且つ明確な積分距離の最小値が決定できないときに、所定変調方式のための基準信号の周期及び送信サイクル時間の少なくとも一方が変更される
請求項1から4の何れか1項に記載のレーダ装置。
【請求項6】
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナのうち、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得し、
取得された各基準パスの受信信号の包絡線の最小の積分距離を与える遅延量から基準パス間の位相補正量を決定し、
決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正を行う、
ことを含む目標探知方法。
【請求項1】
目標を探知するレーダ装置において、
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナと、
各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得する包絡線検波部と、
前記包絡線検波部により取得された各基準パスの受信信号の包絡線間の積分距離の最小値を与える遅延量から基準パス間の位相補正量を決定する決定部と、
前記決定部で決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正部と、
を含むレーダ装置。
【請求項2】
前記各送信アンテナからの信号放射を所定変調方式のための基準信号の周期に対応した各送信サイクル時間で順次切り替える制御部を更に備え、
前記包絡線検波部は、前記各基準パスにおける受信アンテナで受信される、前記各送信サイクル時間に対応する時間の各受信信号の包絡線をそれぞれ取得し、
前記決定部は、前記包絡線検波部で取得された各包絡線の時間長を揃えた後、各包絡線間の最小の積分距離を与える遅延量を求め、
前記位相補正部は、前記各受信アンテナからの受信信号における前記決定部で決定された遅延量分遅延させたタイミングから前記各送信サイクル時間のうちの最小時間分の信号を抽出することにより位相補正を行う、
ことを特徴とする請求項1に記載のレーダ装置。
【請求項3】
基準パスの1つ以上を形成する受信アンテナから受信される受信信号の周波数分析を行う周波数分析部と、
前記各受信アンテナで受信された受信信号のうち、前記周波数分析部の周波数分析結果に応じた中心周波数を持つ所定帯域で透過させるバンドパスフィルタと
をさらに含む請求項1又は2に記載のレーダ装置。
【請求項4】
基準パスの1つ以上を形成する受信アンテナから受信される受信信号の周波数分析を行う周波数分析部と、
前記受信信号が所定閾値以下の周波数成分を含む場合に、各基準パスにおける受信信号が通過するローパスフィルタと
を更に含む請求項1又は2に記載のレーダ装置。
【請求項5】
前記決定部で妥当且つ明確な積分距離の最小値が決定できないときに、所定変調方式のための基準信号の周期及び送信サイクル時間の少なくとも一方が変更される
請求項1から4の何れか1項に記載のレーダ装置。
【請求項6】
空間位相が等しくなる2以上の基準パスを形成する2以上の送信アンテナと受信アンテナとの組合せを含む、2以上の送信アンテナ,及び2以上の受信アンテナのうち、各基準パスにおける受信アンテナで受信される受信信号の包絡線を取得し、
取得された各基準パスの受信信号の包絡線の最小の積分距離を与える遅延量から基準パス間の位相補正量を決定し、
決定された位相補正量を用いて、前記2以上の受信アンテナで受信される全ての受信信号の位相を揃える補正を行う、
ことを含む目標探知方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2012−163440(P2012−163440A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−24110(P2011−24110)
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]