
レーダ装置及び車両
【課題】設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置を提供する。
【解決手段】単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器20と、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する信号処理器30とを備え、信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部38と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部40とを備える。
【解決手段】単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器20と、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する信号処理器30とを備え、信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部38と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部40とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、車両や構造物に設置され、他車両や路面等の固定物を観測するレーダ装置及び車両に関する。
【背景技術】
【0002】
車載レーダ装置の場合、高い周波数のミリ波が用いられるのが一般的であり、高い利得を安価に得るためには、アンテナ構成や送受信器を簡易にし、単一または複数の送受信ビームで水平方向に移動する車両を観測するために、水平面にカバレッジ(覆域)面を設定することが行われている。
【0003】
ここで、車両にレーダ装置を装着する際の一例として、例えばフロントガラスの内側のような路面から高い位置にレーダ装置を設置する場合を考える。この場合、カバレッジ面を水平に設定すると、一般に高利得アンテナの場合、垂直面のビーム幅は狭いため、特に近距離下方や近距離広角の他車両等の目標反射点の振幅が小さくなり、目標を検出できない場合が発生する。また、路面を観測して自速度を検出するために、カバレッジ面を下方に向ける場合、降雪等の影響により路面での反射が小さくなると、測速が困難になる場合がある。
【0004】
また、高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する際に、カバレッジ面を水平にすると、反射が大きい点を観測できず、非検出になる場合がある。また、高さの高い構造物にレーダ装置を固定して設置すると、真下付近を観測できず、設置場所の限られた構造物に制約が生じる。この対策のためにカバレッジ面を鉛直にすると、車線内の狭い範囲しか観測できない。さらには、カバレッジ面を水平にすると、目標の高さを観測できず、例えば車種識別等ができない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−271115号公報
【特許文献2】特開2011−149898号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のレーダ装置では、上述したように、次の問題がある。すなわち、
(1)レーダ装置の設置位置が高い場合は、近距離の下方付近が観測困難になる。
【0007】
(2)速度検出等のために路面(真下付近)を観測すると、別方向の高い位置の同時観測が困難になる。
【0008】
(3)高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する際に、カバレッジ面を水平にすると、反射が大きい点を観測できず、この対策のためにカバレッジ面を鉛直にするとクロスレンジ方向に横切る瞬時しか観測できず、非検出になる場合がある。
【0009】
(4)レーダ装置を高所に固定して設置すると、真下付近を観測できず、カバレッジ面を鉛直にすると、車線内の狭い範囲しか観測できない。
【0010】
(5)カバレッジ面を水平にすると、目標の高さが観測できず、車種識別等ができない等の問題がある。
【0011】
本発明が解決しようとする課題は、設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置及び車両を提供する。
【課題を解決するための手段】
【0012】
実施形態に係るレーダ装置によれば、単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、送受信器および信号処理器を備えている。送受信器は、広角のカバレッジ面を少なくともロール方向に回転させて送信する。信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する。信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部とを備える。
【図面の簡単な説明】
【0013】
【図1】レーダ装置の装着位置の一例を説明するための図である。
【図2】一般的な測距および測速方式が採用されたレーダ装置の構成を示すブロック図である。
【図3】図2に示したレーダ装置の動作を示すフローチャートである。
【図4】図2に示したレーダ装置における送受信のスイープ信号の一例を示す図である。
【図5】図2に示したレーダ装置における送受信のスイープ信号の変化を示す図である。
【図6】図2に示したレーダ装置において振幅がピーク値をもつ周波数を抽出する様子を説明するための図である。
【図7】図2に示したレーダ装置の測角において使用される位相モノパルス方式を説明するための図である。
【図8】図2に示したレーダ装置で行われる相関追尾を説明するための図である。
【図9】図2に示したレーダ装置で行われる座標系の回転を説明するための図である。
【図10】図2に示したレーダ装置において同一車線の近距離下方と隣接車線の2車線を観測する状態を示す図である。
【図11】第1の実施形態に係るレーダ装置の構成を示すブロック図である。
【図12】第1の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図13】一般的なレーダ装置で路面を観測する状態を説明するための図である。
【図14】第2の実施形態に係るレーダ装置においてカバレッジ面をロールさせて一方を観測する路面に向け、他方を高所の固定構造物に向けた状態を示す図である。
【図15】第2の実施形態に係るレーダ装置の構成を示すブロック図である。
【図16】一般的なレーダ装置で高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する状態を示す図である。
【図17】一般的なレーダ装置でカバレッジ面を垂直にして、クロスレンジ方向に横切る目標を観測する状態を示す図である。
【図18】第3の実施形態に係るレーダ装置でカバレッジ面のロール角により、クロスレンジ方向に移動する目標を測角する状態を示す図である。
【図19】一般的なレーダ装置を高所に設置して目標を観測する状態を示す図である。
【図20】第4の実施形態に係るレーダ装置でレンジ−クロスレンジを観測する状態を示す図である。
【図21】第5の実施形態に係るレーダ装置でカバレッジ面において測角し、測距値(レンジ)と測角値により目標の高さを算出する状態を示す図である。
【図22】第1の実施形態〜第5の実施形態に係るレーダ装置でカバレッジ面を斜めに設定する特殊な例を示す図である。
【図23】第1の実施形態〜第5の実施形態に係るレーダ装置でカバレッジ面を斜めに設定する他の例を示す図である。
【図24】第3の実施形態に係るレーダ装置でカバレッジ面を斜めにクロスする場合の応用例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明のレーダ装置及び車両の実施例について、図面を参照しながら詳細に説明する。
【0015】
(第1の実施形態)
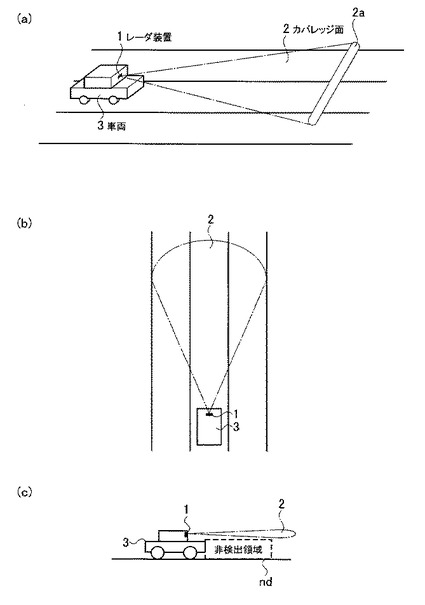
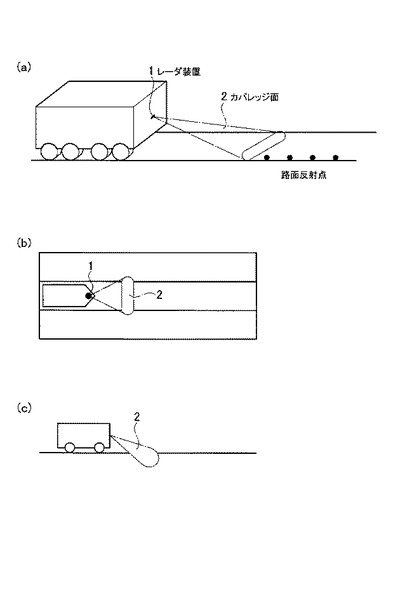
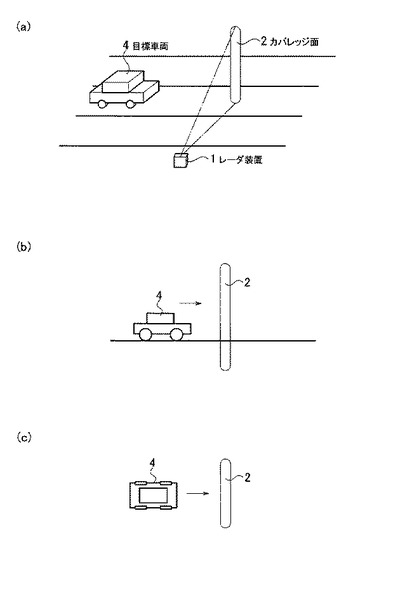
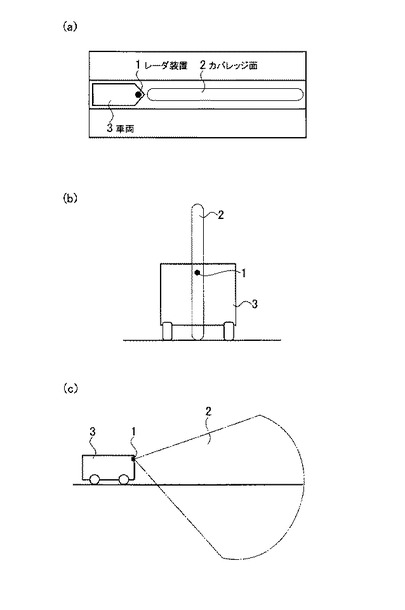
以下に説明する第1の実施形態の理解を容易にするために、まず、レーダ装置1を、例えば車両のフロントガラスの内側等といった路面から高い位置に装着する場合を考える。この場合、図1に示すように、単一または複数の送受信ビームによる広角のカバレッジ面2が水平であるとすれば、高利得アンテナの場合は一般に垂直面(広角のカバレッジ面に直交する狭角のカバレッジ面2a)のビーム幅は狭い。このため、特に近距離下方に形成される非検出領域ndや近距離広角(レーダ装置1の左右)の位置に存在する他車両等の目標の反射点の振幅が小さくなり、非検出になる場合がある。なお、図1(a)は立体図、図1(b)は上面図および図1(c)は側面図である。
【0016】
この対策として、測距、測速および測角の各方式については、広角のカバレッジ面2で観測できれば、特に方法を限定する必要はないが、カバレッジ面2の多数の反射点に対して効果的な方法としては、例えば、特許文献1および特許文献2(MRAV:Measurement Range after measurement Velocity)に開示されている技術がある。
【0017】
ここでは、まず、一般的な測距および測速方式について、図面を参照しながら説明する。なお、測距および測速方式については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.274-275(1996)』に説明されている。
【0018】
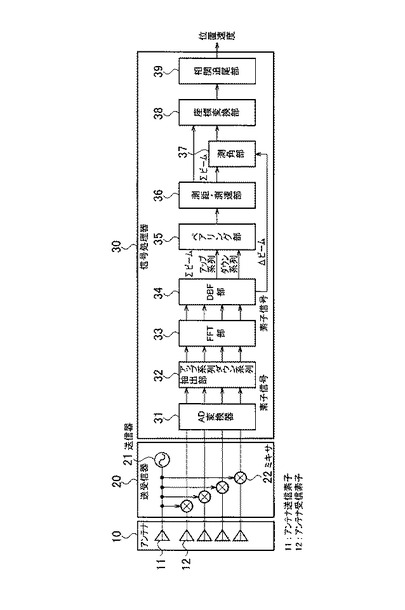
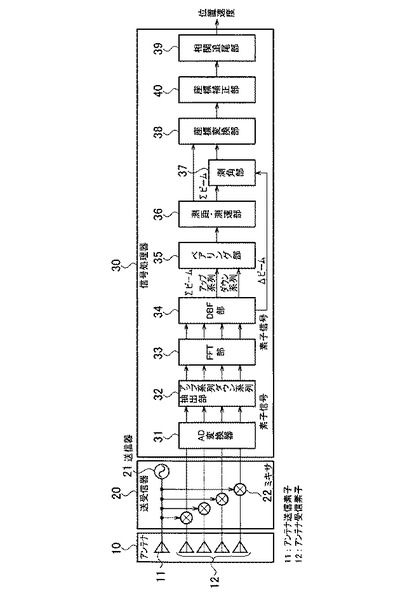
図2は、一般的な測距および測速方式が採用されたレーダ装置の構成を示すブロック図であり、図3は、その動作を示すフローチャートである。このレーダ装置は、アンテナ10、送受信器20および信号処理器30を備えている。
【0019】
アンテナ10は、アンテナ送信素子11と複数のアンテナ受信素子12とから構成されている。アンテナ送信素子11は、送受信器20から電気信号として送られてくる送信信号を電波に変換して外部に送出する。複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。
【0020】
送受信器20は、送信器21と複数のミキサ22を備えており、複数のミキサ22は、複数のアンテナ受信素子12にそれぞれ対応して設けられている。送信器21は、信号処理器30から送られてくる送信制御信号に応じて送信信号を生成し、アンテナ送信素子11および複数のミキサ22に送る。複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換し、信号処理器30に送る。
【0021】
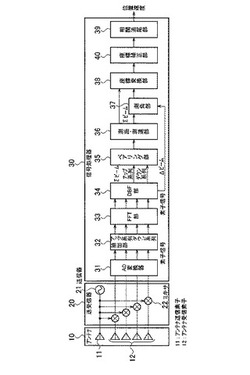
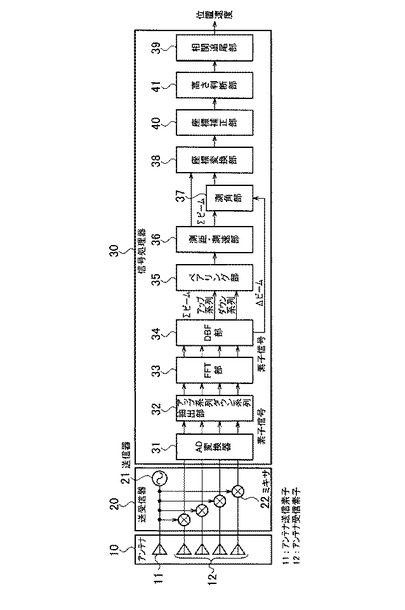
信号処理器30は、AD変換器31、アップ系列ダウン系列抽出部32、FFT(Fast Fourier Transform:高速フーリエ変換)部33、DBF(Digital Beam Forming:デジタルビーム形成)部34、ペアリング部35、測距・測速部36、測角部37、座標変換部38および相関追尾部39を備えている。
【0022】
AD変換器31は、送受信器20から送られてくるアナログ信号をディジタル信号に変換し、素子信号としてアップ系列ダウン系列抽出部32に送る。アップ系列ダウン系列抽出部32は、AD変換器31から送られてきた素子信号からアップチャープ系列の信号とダウンチャープ系列の信号を抽出し、FFT部33に送る。
【0023】
FFT部33は、アップ系列ダウン系列抽出部32から送られてくる信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部34に送る。DBF部34は、FFT部33から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成する。DBF部34で形成されたΣビーム(アップ系列とダウン系列)はペアリング部35に送られ、Δビームは測角部37に送られる。
【0024】
ペアリング部35は、DBF部34から送られてくるΣ0ビームのアップチャープ系列の信号とダウンチャープ系列の信号から、振幅がピークを有する周波数を抽出し、周波数ペアを作成する。ペアリング部35で作成された周波数ペアを示す信号は、測距・測速部36に送られる。測距・測速部36は、ペアリング部35から送られてきた信号(Σビーム)に基づき測距および測速を行い、これにより得られた距離および速度を示す信号を、測角部37および座標変換部38に送る。
【0025】
測角部37は、測距・測速部36から送られてくる信号(Σビーム)およびDBF部34から送られてくるΔビームに基づき測角を行う。測角部37における測角により得られた角度を示す信号は、座標変換部38に送られる。
【0026】
座標変換部38は、測距・測速部36から送られてくる距離および速度を示す極座標の信号および測角部37から送られてくる角度を示す極座標の信号を直交座標の信号に変換する座標変換を行い、相関追尾部39に送る。相関追尾部39は、相関追尾処理を行って目標の位置および速度を算出し、外部に出力する。
【0027】
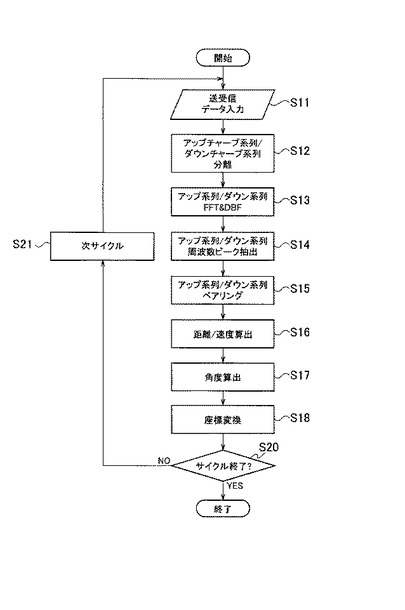
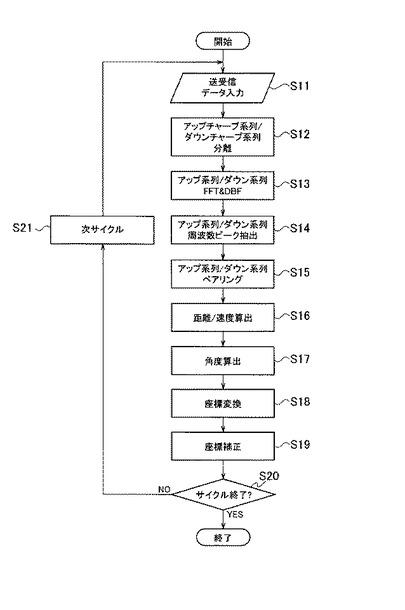
次に、上記のように構成されるレーダ装置の概略の動作を、図3に示すフローチャートを参照しながら説明する。
【0028】
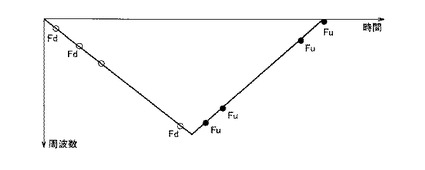
レーダ装置が起動されると、まず、送受信データの入力が行われる(ステップS11)。これにより、送受信器20の内部の送信器21でスイープされた信号は、アンテナ送信素子11から送信される。一方、複数のアンテナ受信素子12で受信された信号は、複数のミキサ22によりそれぞれ周波数変換されて、信号処理器30に送られる。図4および図5は、送受信のスイープ信号の例を示す。信号処理器30では、送受信器20から送られてきた信号がAD変換器31でディジタル信号に変換され、素子信号としてアップ系列ダウン系列抽出部32に送られる。
【0029】
次に、アップチャープ系列とダウンチャープ系列の分離が行われる(ステップS12)。すなわち、アップ系列ダウン系列抽出部32は、AD変換器31から送られてくる素子信号(ディジタル信号)から、アップチャープ信号とダウンチャープ信号を分離し、FFT部33に送る。
【0030】
次に、アップ系列/ダウン系列のFFTおよびDBFが行われる(ステップS13)。すなわち、FFT部33は、アップ系列ダウン系列抽出部32から送られてくるアップチャープ信号とダウンチャープ信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部34に送る。DBF部34は、FFT部33から送られてくる周波数軸の信号を用いて、周波数毎にΣビーム(アップ系列およびダウン系列)とΔビームを形成する。このDBF部34で形成されたΣビームはペアリング部35に送られ、Δビームは測角部37に送られる。
【0031】
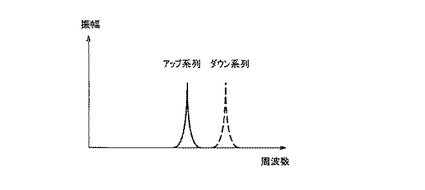
次に、アップ系列/ダウン系列の周波数ピークが抽出される(ステップS14)。すなわち、ペアリング部35は、DBF部34から送られてくるΣビームのアップ系列とダウン系列の信号から、図6に示すような、振幅がピーク値を有する周波数を抽出する。
【0032】
次に、アップ系列/ダウン系列のペアリングが行われる(ステップS15)。すなわち、ペアリング部35は、ダウンチャープ系列とアップチャープ系列のピーク周波数が異なるので、ステップS14で抽出された周波数を対応させ、周波数ペアを生成する。このペアリング部35で生成された周波数ペアを示す信号は、測距・測速部36に送られる。
【0033】
次に、距離および速度が算出される(ステップS16)。すなわち、測距・測速部36は、ペアリング部35から送られてきた信号(Σビーム)に基づき測距および測速を行い、これにより得られた距離および速度を示す信号を、測角部37および座標変換部38に送る。
【0034】
ここで、アップ系列/ダウン系列の周波数ピーク抽出(ステップS14)から距離および速度の算出(ステップS16)までの関係式を次に示す。
【数1】

【0035】
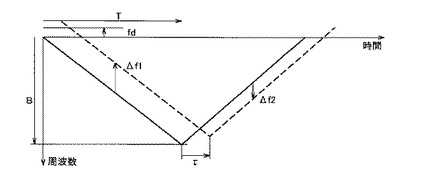
ここで、
Δf1;ダウンチャープ信号の観測周波数
Δf2;アップチャープ信号の観測周波数
fd ;ドップラ周波数
fr ;距離による周波数
上述した距離による周波数frと目標速度によるドップラ周波数fdは、次式で表される。
【0036】
一方、距離による周波数frと目標速度によるドップラー周波数fdは、次式となる。
【数2】
【0037】
ここで、
B;周波数帯域
R;目標距離
T;スイープ時間
c;光速
V;目標速度
λ;波長
(3)式を距離Rと速度Vで展開し、(2)式を代入すると、次式となる。これにより、距離Rと速度Vを算出できる。
【数3】
【0038】
次に、角度が算出される(ステップS17)。すなわち、測角部37は、測距・測速部36から送られてくるΣビームの信号およびDBF部34から送られてくるΔビームの信号に基づき測角を行う。この測角には、例えば位相モノパルス方式を用いることができる。なお、位相モノパルス方式については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.262-264(1996)』に説明されている。
【0039】
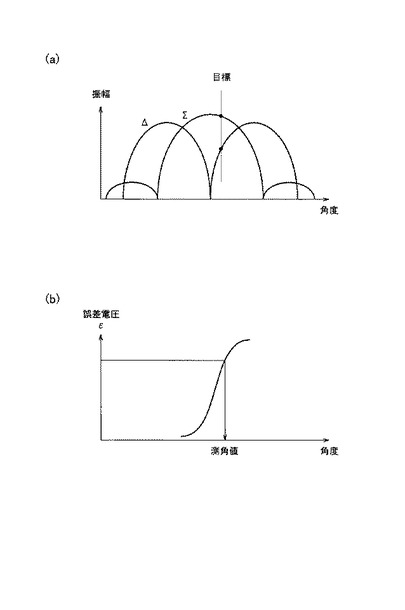
この位相モノパルス方式では、図7(a)に示すように、Σビームの信号とΔビームの信号を用いて、次式で示される誤差電圧が観測される。
【数4】
【0040】
ここで、
Σ ;和ビーム
Δ ;差ビーム
* ;複素共役
Re;実数部
そして、図7(b)に示すような、(5)式で示される誤差電圧とあらかじめ保存されている角度−誤差電圧のテーブルを用いて、角度が算出される。この算出された角度を示す信号は、座標変換部38に送られる。以上の測距、測速および測角の各方式により、カバレッジ面の距離、速度および角度が算出される。
【0041】
次に、座標変換が行われる(ステップS18)。すなわち、座標変換部38は、測距・測速部36から送られてくる距離および速度を示す信号および測角部37から送られてくる角度を示す信号に対して座標変換を行い、相関追尾部39に送る。より詳しくは、座標変換部38は、クロスレンジ−レンジの(X,Y)軸に変換するために、次式の極座標−直交座標変換を行い、変換結果を相関追尾部39に送る。
【数5】
【0042】
ここで、
R :測距値
V :測速値(ラジアル方向)
Θ :測角値(レーダ正面を0度)
(X,Y) :クロスレンジ、レンジの位置
(Vx,Vy):クロスレンジ、レンジの速度
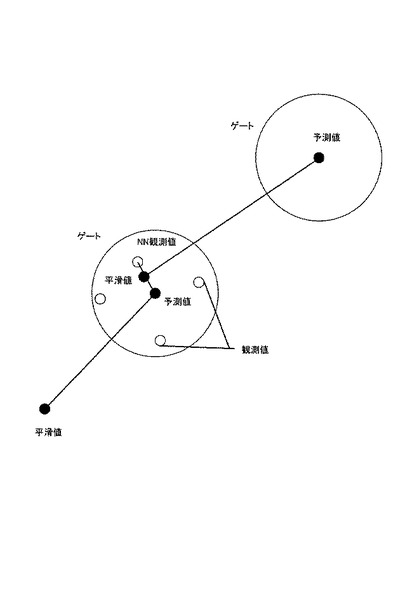
相関追尾部39は、相関追尾処理により、平滑位置および平滑速度を算出する。図8は、一般的な相関追尾(NN相関、α−β追尾方式)を説明するための図である。なお、相関追尾については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.264-267(1996)』に説明されている。
【0043】
ここでは、説明を簡単にするために、1次元(X軸またはY軸のみ)で表現する。観測(位置)ベクトルをy、平滑ベクトルをxs、予測ベクトルをxpとし、
【数6】
【0044】
とすると、平滑位置および平滑速度は次式で表現できる。
【数7】
【0045】
ここで、
yr(k,j);観測k回目、観測(位置)ベクトルj個目の残差ベクトル
y(k,j) ;観測k回目のj個目の観測(位置)ベクトル
yr(k) ;観測k回目の2乗誤差が最小となる残差ベクトル
xs(k) ;観測k回目の平滑ベクトル
xp(k) ;観測k回目の予測ベクトル(k−1回目までのデータを使用)
H ;観測マトリクス
H=[1 0]
とする。
【0046】
以上、一般的な観測値として相関追尾による平滑値を得る方法について説明したが、平滑値については、サイクル間の相関追尾を実施しなくても、サイクル内の同一の反射点付近の複数の観測値の平均等をとる処理によって得ることもできる。
【0047】
以上のステップS18の処理が終了すると、次に、サイクルが終了したかどうかが調べられる(ステップS20)。ステップS20において、サイクルが終了していないことが判断されると、次のサイクルの処理に移す処理が行われる(ステップS21)。その後、ステップS11に戻り、上述した処理が繰り返される。一方、ステップS20において、サイクルが終了したことが判断されると、このレーダ装置の処理は終了する。
【0048】
次に、第1の実施形態に係るレーダ装置について詳細に説明する。車載レーダ装置等の場合は、レーダ装置の設置位置が比較的高いため、図1を参照して既に説明したように、カバレッジ面2を水平にすると近距離下方の目標の検出が困難になる。この対策として、図9(b)に示すように、カバレッジ面2をロール方向に回転させる。カバレッジ面2の回転は、送受信器20からアンテナ10を介して送信される送受信ビームを制御することにより行われる。
【0049】
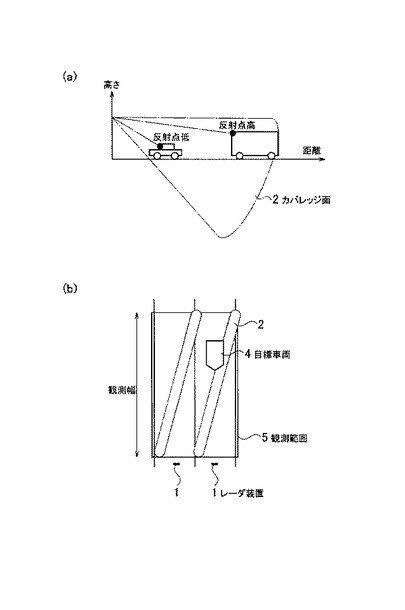
また、回転角は、観測範囲に応じて設定されるが、例えば同一車線と隣接車線を観測するためには、カバレッジ面2が隣接車線付近を向く(カバレッジ面2の一端部分が隣接車線に接する)ように設定される。これにより、図10に示すように、同一車線の近距離下方と隣接車線の2車線を観測することができる。なお、図10(a)は立体図であり、図10(b)は上面図である。
【0050】
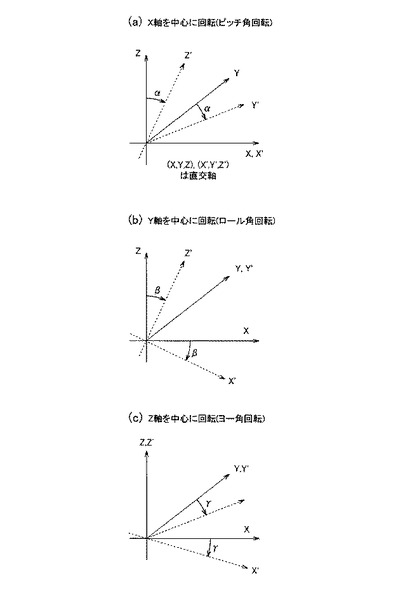
これを定式化するために、図9を参照して、座標系の回転について説明する。座標を(X,Y,Z)として、X軸を中心にして角度αだけ回転した場合の変換後の座標(X’,Y’,Z’)は、
【数8】
【0051】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
となる。
【0052】
また、Y軸を中心にして角度βだけ回転した場合は、
となる。また、Y軸を中心にして角度β回転した場合は、
【数9】
【0053】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
β :ロール角
となる。
【0054】
また、Z軸を中心にして角度γだけ回転した場合は、
【数10】
【0055】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
γ :ヨー角
となる。
【0056】
したがって、座標回転として角度α、β、γを順に組み合わせた後の座標を(X’,Y’,Z’)とすると、
【数11】
【0057】
となる。
【0058】
これより、逆行列を用いて
【数12】
【0059】
逆行列を変換すると次式となる。
【数13】
【0060】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α、β、γ :ピッチ、ロール、ヨー角
以上の(11)式〜(13)式により、観測値(X’、Y’,Z’)から元の座標(X,Y,Z)に変換することができる。
【0061】
以上の点を踏まえて、例えばロール角βのみ(α=γ=0)回転した場合には、カバレッジ面がロール角により傾くため、実空間(水平面)での座標は、観測値(X’,Y’,Z’)を元に、後述する座標補正処理において、次式を用いて補正する。
【0062】
(9)式の逆行列演算より、
【数14】
【0063】
となり、高さZを無視すると
【数15】
【0064】
ここで、
(X’,Y’,Z’):観測カバレッジ面における座標
(X,Y,Z) :実空間における座標
β :カバレッジ面のロール角
と定式化できる。他の回転を加えた場合には、(13)式を用いることができる。
【0065】
図11は、第1の実施形態に係るレーダ装置の構成を示すブロック図である。このレーダ装置は、図2に示したレーダ装置の信号処理器30に、座標補正部40が追加されて構成されている。座標補正部40は、座標変換部38から送られてきた直交座標を示す信号に対して上述した座標補正処理を施し、相関追尾部39に送る。
【0066】
次に、上記のように構成される第1の実施形態に係るレーダ装置の概略の動作を、図12に示すフローチャートを参照しながら説明する。このフローチャートは、図3に示したフローチャートに、座標補正処理を行うステップS19が追加されて構成されている。すなわち、ステップS19では、座標補正部40は、座標変換部38から送られてきた座標を示す信号に対して上述した補正を施し、相関追尾部39に送る。
【0067】
すなわち、信号処理器30は、送受信器20からの送信に応答して該送受信器20で受信された信号を処理する。これにより、前方および回転により広角のカバレッジ面2が接する側の路面を観測することができる。
【0068】
以上説明したように、第1の実施形態に係るレーダ装置によれば、カバレッジ面2をロール方向に回転させることにより、レーダ装置の高さが高い場合であっても、水平面の広角の反射点のフェージングによる影響を抑圧した上で、同一車線および隣接車線を観測することができる。
【0069】
(第2の実施形態)
第2の実施形態に係るレーダ装置は、自動車や鉄道車両等において、車両の路面を観測して自速度を観測する。路面(真下付近)を観測する場合は、図13に示すようにカバレッジ面2を下方に向けるため、降雪等の影響で路面を観測できず、速度を検出できない場合がある。
【0070】
また、路面を観測できたとしても、送受信ビームが路面を照射する面積が小さくて同一の反射点(路面反射点)を観測できる時間が短くなり、その結果、非検出になったり相関追尾できなかったりして、速度を精度よく観測できない場合がある。なお、図13(a)は立体図、図13(b)は上面図および図13(c)は側面図である。
【0071】
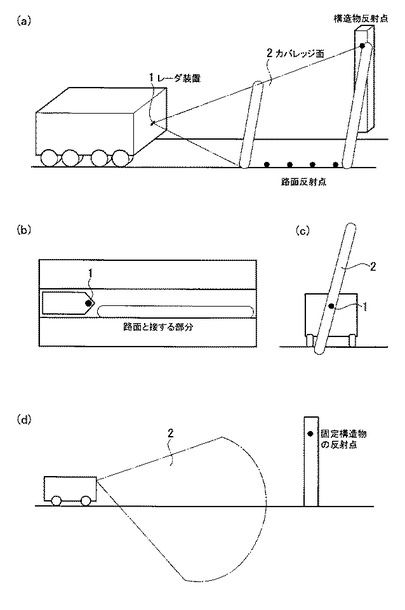
この対策として、第2の実施形態に係るレーダ装置は、図14に示すように、カバレッジ面2のロール角により、カバレッジ面2の一方を観測する路面に向け、他方を高所の固定構造物に向ける。なお、図14(a)は立体図、図14(b)は上面図、図14(c)は前面図および図14(d)は側面図である。カバレッジ面2による測角により、路面側であるか構造物側であるかを判別できるため、各々の反射点を検出し、必要に応じて相関追尾することにより、自速度を算出することができる。この場合、異なる場所に基づく速度を算出できるため、降雪等の影響で一方が非検出であっても他方を検出でき、このような冗長性により安定して速度を得ることができる。また、路面を照射できる時間が進行方向に対して長いため、同一の反射点(路面反射点)を長く観測でき、非検出になりにくく、また相関追尾も簡易になる。
【0072】
以下、定式化を行う。観測カバレッジ面における観測値を(X’,Y’,Z’)とすると、高さを含めた実空間における座標は次式となる。
【数16】
【0073】
ここで、
(X’,Y’,Z’):観測カバレッジ面における座標
(X,Y,Z) :実空間における座標
β :カバレッジ面のロール角
観測カバレッジ面においては、Z’=0とすると、
【数17】
【0074】
となる。
【0075】
図15は、第2の実施形態に係るレーダ装置の構成を示すブロック図である。このレーダ装置は、第1の実施形態に係るレーダ装置に高さ判断部41が追加されて構成されている。高さ判断部41は、路面と高所構造物を抽出するためのスレショルドZth1とZth2を用いて、Zth1以下であれば路面と判断し、Zth2以上であれば高所構造物と判断する。それぞれ抽出した路面と高所構造物の反射点より、(4)式を用いて実空間(X,Y)軸での速度を抽出することができる。
【0076】
これにより、路面または高所構造物の少なくとも一方の反射点の速度を算出し、算出した速度と逆符号の自車速度を算出することができる。さらに、平滑速度を算出するには、反射点の位置(X,Y)を用いて、次のサイクルにおける(X,Y)との相関をとり、その観測値を元に追尾処理すればよい。相関追尾処理としては、上述した相関追尾(NN相関、α−β追尾方式)を用いることができ、これにより速度精度を向上させることができる。
【0077】
以上説明したように、第2の実施形態に係るレーダ装置によれば、カバレッジ面で検出される下部および上部の反射点を抽出することにより、他の反射点の影響を抑圧した上で、路面反射点と高所の構造物の反射点を抽出できるため、自車速度を高精度に検出できる。また、降雪の影響等で下部または上部の反射点のうち一方が検出できない場合であっても他方で補間することができるので、安定した速度抽出が可能になる。
【0078】
(第3の実施形態)
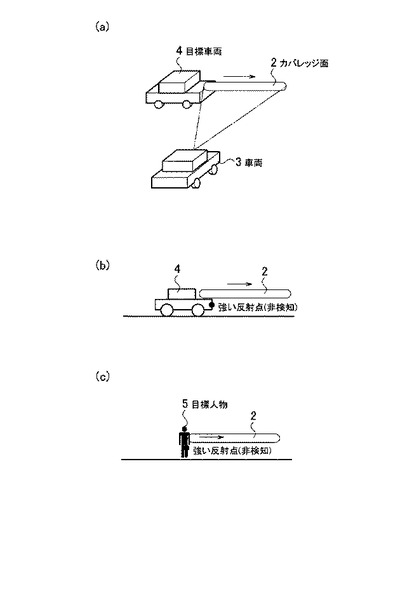
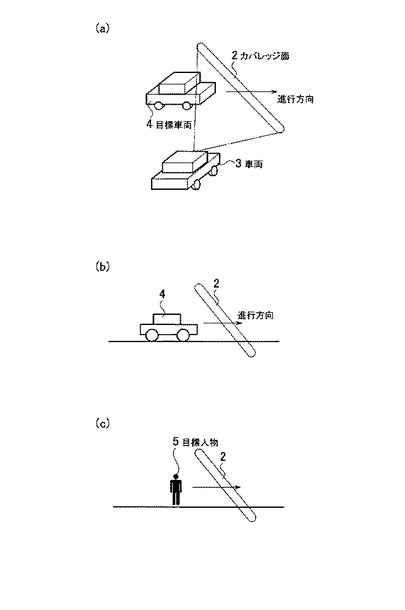
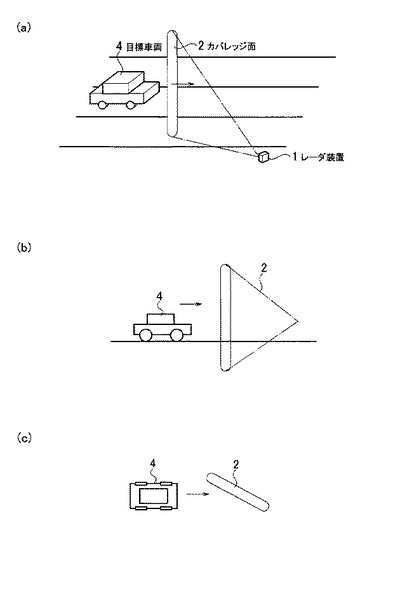
図16に示すように、高さ方向に反射点の幅を持つ目標(目標車両4または目標人物5)をクロスレンジ方向に観測する際に、カバレッジ面2を水平にすると、反射が大きい点を観測できず、非検出になる場合がある。なお、図16(a)は立体図ならびに図16(b)および図16(c)は側面図である。これを避けるために、図17に示すようにカバレッジ面2を垂直にして、クロスレンジ方向に横切る目標を観測する方法もあるが、観測時間が短くなるため、非検出になる場合がある。なお、図17(a)は立体図、図17(b)は側面図および図17(c)は上面図である。
【0079】
この対策として、第3の実施形態に係るレーダ装置は、図18に示すように、カバレッジ面2のロール角により、クロスレンジ方向に移動する目標の低い部分から高い部分まで、カバレッジ面2を横切るようにし、カバレッジ面2において測角する。なお、図18(a)は立体図ならびに図18(b)および図18(c)は側面図である。この測角値、ロール角、レンジ値を用いて、次式によりクロスレンジ位置を算出できる。このクロスレンジ位置の算出は、例えば、相関追尾部39で行うことができる。
【数18】
【0080】
高さZを無視すると
【数19】
【0081】
ここで、
(X’,Y’,Z’) :観測カバレッジ面における座標
(X,Y,Z):実空間における座標
β :カバレッジ面のロール角
以上により、クロスレンジ方向の目標位置の検出とその位置を用いた相関追尾ができる。
【0082】
以上説明したように、第3の実施形態に係るレーダ装置によれば、クロスレンジ方向に移動する高さのある目標物を検出する際に、ある高さの反射点のみでなく、高さ全体にわたる反射点を検出して追尾することができるので、安定した追尾が可能となる。
【0083】
(第4の実施形態)
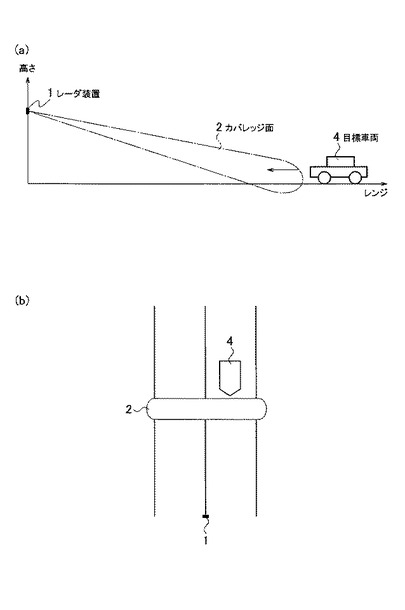
レーダ装置1を高所に設置すると、図19(a)の側面図に示すように、レーダ装置1の真下付近を観測できず、カバレッジ面2を鉛直にすると、図19(b)の上面図に示すように、車線内の狭い範囲しか観測できない。
【0084】
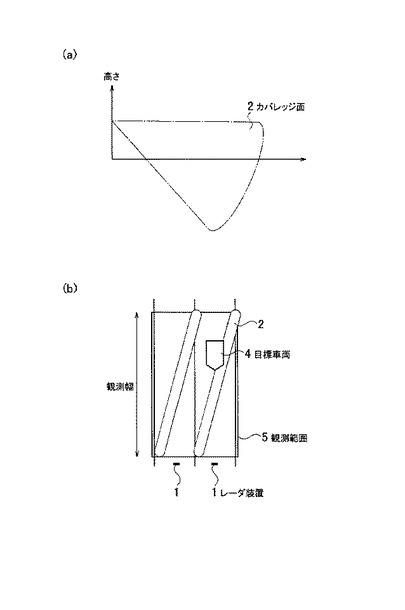
この対策として、第4の実施形態に係るレーダ装置は、図20に示すようにカバレッジ面2を垂直にし、さらに、アジマス方向に角度を持たせて設定し、所定のレンジ−クロスレンジの観測範囲5の対角線上に斜めに向け、レンジ−クロスレンジを観測する。なお、図20(a)は側面図および図20(b)は上面図である。カバレッジ面2を下方に向けることを考慮すると、一般にはピッチ角α、ロール角βおよびヨー角γの全ての回転を伴うため、次式となる。
【数20】
【0085】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
β :ロール角(90度)
γ :ヨー角
ピッチ角αは観測幅を覆うように下方に設定する。ロール角βは90度を基本とする。ヨー角γは1つの車線を覆うように設定する。観測値Z’は、一般に0であり、変換後も高さ情報を用いない場合はZ=Z’=0とする。これにより、クロスレンジ方向の目標位置の検出とその位置を用いた相関追尾を行うことができる。
【0086】
以上説明したように、第4の実施形態に係るレーダ装置によれば、カバレッジ面を所定のレンジ−クロスレンジの観測範囲5の対角線上に設定することにより、所定の幅以上の車両は、観測範囲5においてレンジ−クロスレンジの両者を近距離真下付近まで観測することができる。
【0087】
(第5の実施形態)
カバレッジ面を水平にすると、目標の高さを観測できず、車種等を識別できない。この対策として、第5の実施形態に係るレーダ装置は、図21(a)の側面図および図21(b)の上面図に示すように、カバレッジ面2において測角し、測距値(レンジ)と測角値により、次式により目標の高さZ’を算出する。
【数21】
【0088】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
β :ロール角(90度)
γ :ヨー角
ピッチ角αは観測幅を覆うように下方に設定する。ロール角βは90度を基本とする。ヨー角γは1つの車線を覆うように設定する。観測値Z’は、一般に0である。変換後の高さ情報Z’を用いて、普通車または大型車等の各々の高さに対応する所定のスレショルドZth(n)(n=1〜N、Nは識別する車両の種別)と比較することにより、目標の識別を行う。
【0089】
以上説明したように、第5の実施形態に係るレーダ装置によれば、第4の実施形態に係るレーダ装置に加えて、カバレッジ面のレンジ−クロスレンジ値を元にした座標変換により、目標の高さを抽出し、所定のスレショルドと比較することにより小型車または大型車等を識別することができる。
【0090】
以上のように、第1の実施形態〜第5の実施形態に係るレーダ装置によれば、広角のカバレッジ面の3軸(ロール/ピッチ/ヨー)の設定角度により、レーダ装置を比較的高所に設置した場合であっても、近距離真下から遠距離までの所定の範囲の目標物の検出/追尾能力を高めることができる。また、カバレッジ面を目標物の進行方向に対して斜めに設定することにより、カバレッジ内の不要な反射点を抑圧し、必要な反射点に対して立体的に幅を持たせても観測できる時間を長くすることにより、検出/追尾能力を高めることができる。
【0091】
なお、カバレッジ面2を斜めに設定する特殊な例として、図22に示すように、車載のレーダ装置でカバレッジ面2を鉛直にする場合があるが、これは第1の実施形態の内容に含まれる。なお、図22(a)は上面図、図22(b)は前面図および図22(c)は側面図である。また、第1の実施形態において、図23(a)の側面図および図23(b)の上面図に示すように、構造物の高所にレーダ装置1を固定して車線を観測する場合もある。
【0092】
また、第3の実施形態で説明したカバレッジ面2を斜めにクロスさせる場合の応用例として、図24に示すように、目標の斜め前方から観測し、カバレッジ面2を真横にする場合に比べて、観測時間を長くして検出能力を高めることもできる。なお、図24(a)は立体図、図24(b)は側面図および図24(c)は上面図である。
【0093】
以上のように、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0094】
10 アンテナ
11 アンテナ送信素子
12 アンテナ受信素子
20 送受信器
21 送信器
22 ミキサ
30 信号処理器
31 AD変換器
32 アップ系列ダウン系列抽出部
33 FFT部
34 DBF部
35 ペアリング部
36 測距・測速部
37 測角部
38 座標変換部
39 相関追尾部
40 座標補正部
41 高さ判断部
【技術分野】
【0001】
本発明の実施形態は、車両や構造物に設置され、他車両や路面等の固定物を観測するレーダ装置及び車両に関する。
【背景技術】
【0002】
車載レーダ装置の場合、高い周波数のミリ波が用いられるのが一般的であり、高い利得を安価に得るためには、アンテナ構成や送受信器を簡易にし、単一または複数の送受信ビームで水平方向に移動する車両を観測するために、水平面にカバレッジ(覆域)面を設定することが行われている。
【0003】
ここで、車両にレーダ装置を装着する際の一例として、例えばフロントガラスの内側のような路面から高い位置にレーダ装置を設置する場合を考える。この場合、カバレッジ面を水平に設定すると、一般に高利得アンテナの場合、垂直面のビーム幅は狭いため、特に近距離下方や近距離広角の他車両等の目標反射点の振幅が小さくなり、目標を検出できない場合が発生する。また、路面を観測して自速度を検出するために、カバレッジ面を下方に向ける場合、降雪等の影響により路面での反射が小さくなると、測速が困難になる場合がある。
【0004】
また、高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する際に、カバレッジ面を水平にすると、反射が大きい点を観測できず、非検出になる場合がある。また、高さの高い構造物にレーダ装置を固定して設置すると、真下付近を観測できず、設置場所の限られた構造物に制約が生じる。この対策のためにカバレッジ面を鉛直にすると、車線内の狭い範囲しか観測できない。さらには、カバレッジ面を水平にすると、目標の高さを観測できず、例えば車種識別等ができない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−271115号公報
【特許文献2】特開2011−149898号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のレーダ装置では、上述したように、次の問題がある。すなわち、
(1)レーダ装置の設置位置が高い場合は、近距離の下方付近が観測困難になる。
【0007】
(2)速度検出等のために路面(真下付近)を観測すると、別方向の高い位置の同時観測が困難になる。
【0008】
(3)高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する際に、カバレッジ面を水平にすると、反射が大きい点を観測できず、この対策のためにカバレッジ面を鉛直にするとクロスレンジ方向に横切る瞬時しか観測できず、非検出になる場合がある。
【0009】
(4)レーダ装置を高所に固定して設置すると、真下付近を観測できず、カバレッジ面を鉛直にすると、車線内の狭い範囲しか観測できない。
【0010】
(5)カバレッジ面を水平にすると、目標の高さが観測できず、車種識別等ができない等の問題がある。
【0011】
本発明が解決しようとする課題は、設置位置が高い場合であっても、必要な目標物を必要な観測範囲で検出および追尾できるレーダ装置及び車両を提供する。
【課題を解決するための手段】
【0012】
実施形態に係るレーダ装置によれば、単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有し、送受信器および信号処理器を備えている。送受信器は、広角のカバレッジ面を少なくともロール方向に回転させて送信する。信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および回転により広角のカバレッジ面が接する側の路面を観測する。信号処理器は、送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部と、座標変換部において得られた直交座標の信号をロール方向の回転に応じて補正する座標補正部とを備える。
【図面の簡単な説明】
【0013】
【図1】レーダ装置の装着位置の一例を説明するための図である。
【図2】一般的な測距および測速方式が採用されたレーダ装置の構成を示すブロック図である。
【図3】図2に示したレーダ装置の動作を示すフローチャートである。
【図4】図2に示したレーダ装置における送受信のスイープ信号の一例を示す図である。
【図5】図2に示したレーダ装置における送受信のスイープ信号の変化を示す図である。
【図6】図2に示したレーダ装置において振幅がピーク値をもつ周波数を抽出する様子を説明するための図である。
【図7】図2に示したレーダ装置の測角において使用される位相モノパルス方式を説明するための図である。
【図8】図2に示したレーダ装置で行われる相関追尾を説明するための図である。
【図9】図2に示したレーダ装置で行われる座標系の回転を説明するための図である。
【図10】図2に示したレーダ装置において同一車線の近距離下方と隣接車線の2車線を観測する状態を示す図である。
【図11】第1の実施形態に係るレーダ装置の構成を示すブロック図である。
【図12】第1の実施形態に係るレーダ装置の動作を示すフローチャートである。
【図13】一般的なレーダ装置で路面を観測する状態を説明するための図である。
【図14】第2の実施形態に係るレーダ装置においてカバレッジ面をロールさせて一方を観測する路面に向け、他方を高所の固定構造物に向けた状態を示す図である。
【図15】第2の実施形態に係るレーダ装置の構成を示すブロック図である。
【図16】一般的なレーダ装置で高さ方向に反射点の幅を持つ目標をクロスレンジ方向に観測する状態を示す図である。
【図17】一般的なレーダ装置でカバレッジ面を垂直にして、クロスレンジ方向に横切る目標を観測する状態を示す図である。
【図18】第3の実施形態に係るレーダ装置でカバレッジ面のロール角により、クロスレンジ方向に移動する目標を測角する状態を示す図である。
【図19】一般的なレーダ装置を高所に設置して目標を観測する状態を示す図である。
【図20】第4の実施形態に係るレーダ装置でレンジ−クロスレンジを観測する状態を示す図である。
【図21】第5の実施形態に係るレーダ装置でカバレッジ面において測角し、測距値(レンジ)と測角値により目標の高さを算出する状態を示す図である。
【図22】第1の実施形態〜第5の実施形態に係るレーダ装置でカバレッジ面を斜めに設定する特殊な例を示す図である。
【図23】第1の実施形態〜第5の実施形態に係るレーダ装置でカバレッジ面を斜めに設定する他の例を示す図である。
【図24】第3の実施形態に係るレーダ装置でカバレッジ面を斜めにクロスする場合の応用例を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明のレーダ装置及び車両の実施例について、図面を参照しながら詳細に説明する。
【0015】
(第1の実施形態)
以下に説明する第1の実施形態の理解を容易にするために、まず、レーダ装置1を、例えば車両のフロントガラスの内側等といった路面から高い位置に装着する場合を考える。この場合、図1に示すように、単一または複数の送受信ビームによる広角のカバレッジ面2が水平であるとすれば、高利得アンテナの場合は一般に垂直面(広角のカバレッジ面に直交する狭角のカバレッジ面2a)のビーム幅は狭い。このため、特に近距離下方に形成される非検出領域ndや近距離広角(レーダ装置1の左右)の位置に存在する他車両等の目標の反射点の振幅が小さくなり、非検出になる場合がある。なお、図1(a)は立体図、図1(b)は上面図および図1(c)は側面図である。
【0016】
この対策として、測距、測速および測角の各方式については、広角のカバレッジ面2で観測できれば、特に方法を限定する必要はないが、カバレッジ面2の多数の反射点に対して効果的な方法としては、例えば、特許文献1および特許文献2(MRAV:Measurement Range after measurement Velocity)に開示されている技術がある。
【0017】
ここでは、まず、一般的な測距および測速方式について、図面を参照しながら説明する。なお、測距および測速方式については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.274-275(1996)』に説明されている。
【0018】
図2は、一般的な測距および測速方式が採用されたレーダ装置の構成を示すブロック図であり、図3は、その動作を示すフローチャートである。このレーダ装置は、アンテナ10、送受信器20および信号処理器30を備えている。
【0019】
アンテナ10は、アンテナ送信素子11と複数のアンテナ受信素子12とから構成されている。アンテナ送信素子11は、送受信器20から電気信号として送られてくる送信信号を電波に変換して外部に送出する。複数のアンテナ受信素子12は、外部からの電波を受信して電気信号に変換し、受信信号として送受信器20に送る。
【0020】
送受信器20は、送信器21と複数のミキサ22を備えており、複数のミキサ22は、複数のアンテナ受信素子12にそれぞれ対応して設けられている。送信器21は、信号処理器30から送られてくる送信制御信号に応じて送信信号を生成し、アンテナ送信素子11および複数のミキサ22に送る。複数のミキサ22は、複数のアンテナ受信素子12からそれぞれ受け取った受信信号を、送信器21からの信号に応じて周波数変換し、信号処理器30に送る。
【0021】
信号処理器30は、AD変換器31、アップ系列ダウン系列抽出部32、FFT(Fast Fourier Transform:高速フーリエ変換)部33、DBF(Digital Beam Forming:デジタルビーム形成)部34、ペアリング部35、測距・測速部36、測角部37、座標変換部38および相関追尾部39を備えている。
【0022】
AD変換器31は、送受信器20から送られてくるアナログ信号をディジタル信号に変換し、素子信号としてアップ系列ダウン系列抽出部32に送る。アップ系列ダウン系列抽出部32は、AD変換器31から送られてきた素子信号からアップチャープ系列の信号とダウンチャープ系列の信号を抽出し、FFT部33に送る。
【0023】
FFT部33は、アップ系列ダウン系列抽出部32から送られてくる信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部34に送る。DBF部34は、FFT部33から送られてくる周波数軸上の信号を用いて、ΣビームとΔビームを形成する。DBF部34で形成されたΣビーム(アップ系列とダウン系列)はペアリング部35に送られ、Δビームは測角部37に送られる。
【0024】
ペアリング部35は、DBF部34から送られてくるΣ0ビームのアップチャープ系列の信号とダウンチャープ系列の信号から、振幅がピークを有する周波数を抽出し、周波数ペアを作成する。ペアリング部35で作成された周波数ペアを示す信号は、測距・測速部36に送られる。測距・測速部36は、ペアリング部35から送られてきた信号(Σビーム)に基づき測距および測速を行い、これにより得られた距離および速度を示す信号を、測角部37および座標変換部38に送る。
【0025】
測角部37は、測距・測速部36から送られてくる信号(Σビーム)およびDBF部34から送られてくるΔビームに基づき測角を行う。測角部37における測角により得られた角度を示す信号は、座標変換部38に送られる。
【0026】
座標変換部38は、測距・測速部36から送られてくる距離および速度を示す極座標の信号および測角部37から送られてくる角度を示す極座標の信号を直交座標の信号に変換する座標変換を行い、相関追尾部39に送る。相関追尾部39は、相関追尾処理を行って目標の位置および速度を算出し、外部に出力する。
【0027】
次に、上記のように構成されるレーダ装置の概略の動作を、図3に示すフローチャートを参照しながら説明する。
【0028】
レーダ装置が起動されると、まず、送受信データの入力が行われる(ステップS11)。これにより、送受信器20の内部の送信器21でスイープされた信号は、アンテナ送信素子11から送信される。一方、複数のアンテナ受信素子12で受信された信号は、複数のミキサ22によりそれぞれ周波数変換されて、信号処理器30に送られる。図4および図5は、送受信のスイープ信号の例を示す。信号処理器30では、送受信器20から送られてきた信号がAD変換器31でディジタル信号に変換され、素子信号としてアップ系列ダウン系列抽出部32に送られる。
【0029】
次に、アップチャープ系列とダウンチャープ系列の分離が行われる(ステップS12)。すなわち、アップ系列ダウン系列抽出部32は、AD変換器31から送られてくる素子信号(ディジタル信号)から、アップチャープ信号とダウンチャープ信号を分離し、FFT部33に送る。
【0030】
次に、アップ系列/ダウン系列のFFTおよびDBFが行われる(ステップS13)。すなわち、FFT部33は、アップ系列ダウン系列抽出部32から送られてくるアップチャープ信号とダウンチャープ信号を高速フーリエ変換により周波数軸上の信号に変換し、DBF部34に送る。DBF部34は、FFT部33から送られてくる周波数軸の信号を用いて、周波数毎にΣビーム(アップ系列およびダウン系列)とΔビームを形成する。このDBF部34で形成されたΣビームはペアリング部35に送られ、Δビームは測角部37に送られる。
【0031】
次に、アップ系列/ダウン系列の周波数ピークが抽出される(ステップS14)。すなわち、ペアリング部35は、DBF部34から送られてくるΣビームのアップ系列とダウン系列の信号から、図6に示すような、振幅がピーク値を有する周波数を抽出する。
【0032】
次に、アップ系列/ダウン系列のペアリングが行われる(ステップS15)。すなわち、ペアリング部35は、ダウンチャープ系列とアップチャープ系列のピーク周波数が異なるので、ステップS14で抽出された周波数を対応させ、周波数ペアを生成する。このペアリング部35で生成された周波数ペアを示す信号は、測距・測速部36に送られる。
【0033】
次に、距離および速度が算出される(ステップS16)。すなわち、測距・測速部36は、ペアリング部35から送られてきた信号(Σビーム)に基づき測距および測速を行い、これにより得られた距離および速度を示す信号を、測角部37および座標変換部38に送る。
【0034】
ここで、アップ系列/ダウン系列の周波数ピーク抽出(ステップS14)から距離および速度の算出(ステップS16)までの関係式を次に示す。
【数1】
【0035】
ここで、
Δf1;ダウンチャープ信号の観測周波数
Δf2;アップチャープ信号の観測周波数
fd ;ドップラ周波数
fr ;距離による周波数
上述した距離による周波数frと目標速度によるドップラ周波数fdは、次式で表される。
【0036】
一方、距離による周波数frと目標速度によるドップラー周波数fdは、次式となる。
【数2】
【0037】
ここで、
B;周波数帯域
R;目標距離
T;スイープ時間
c;光速
V;目標速度
λ;波長
(3)式を距離Rと速度Vで展開し、(2)式を代入すると、次式となる。これにより、距離Rと速度Vを算出できる。
【数3】
【0038】
次に、角度が算出される(ステップS17)。すなわち、測角部37は、測距・測速部36から送られてくるΣビームの信号およびDBF部34から送られてくるΔビームの信号に基づき測角を行う。この測角には、例えば位相モノパルス方式を用いることができる。なお、位相モノパルス方式については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.262-264(1996)』に説明されている。
【0039】
この位相モノパルス方式では、図7(a)に示すように、Σビームの信号とΔビームの信号を用いて、次式で示される誤差電圧が観測される。
【数4】
【0040】
ここで、
Σ ;和ビーム
Δ ;差ビーム
* ;複素共役
Re;実数部
そして、図7(b)に示すような、(5)式で示される誤差電圧とあらかじめ保存されている角度−誤差電圧のテーブルを用いて、角度が算出される。この算出された角度を示す信号は、座標変換部38に送られる。以上の測距、測速および測角の各方式により、カバレッジ面の距離、速度および角度が算出される。
【0041】
次に、座標変換が行われる(ステップS18)。すなわち、座標変換部38は、測距・測速部36から送られてくる距離および速度を示す信号および測角部37から送られてくる角度を示す信号に対して座標変換を行い、相関追尾部39に送る。より詳しくは、座標変換部38は、クロスレンジ−レンジの(X,Y)軸に変換するために、次式の極座標−直交座標変換を行い、変換結果を相関追尾部39に送る。
【数5】
【0042】
ここで、
R :測距値
V :測速値(ラジアル方向)
Θ :測角値(レーダ正面を0度)
(X,Y) :クロスレンジ、レンジの位置
(Vx,Vy):クロスレンジ、レンジの速度
相関追尾部39は、相関追尾処理により、平滑位置および平滑速度を算出する。図8は、一般的な相関追尾(NN相関、α−β追尾方式)を説明するための図である。なお、相関追尾については、例えば『吉田孝監修、「改訂レーダ技術」、社団法人電子情報通信学会、pp.264-267(1996)』に説明されている。
【0043】
ここでは、説明を簡単にするために、1次元(X軸またはY軸のみ)で表現する。観測(位置)ベクトルをy、平滑ベクトルをxs、予測ベクトルをxpとし、
【数6】
【0044】
とすると、平滑位置および平滑速度は次式で表現できる。
【数7】
【0045】
ここで、
yr(k,j);観測k回目、観測(位置)ベクトルj個目の残差ベクトル
y(k,j) ;観測k回目のj個目の観測(位置)ベクトル
yr(k) ;観測k回目の2乗誤差が最小となる残差ベクトル
xs(k) ;観測k回目の平滑ベクトル
xp(k) ;観測k回目の予測ベクトル(k−1回目までのデータを使用)
H ;観測マトリクス
H=[1 0]
とする。
【0046】
以上、一般的な観測値として相関追尾による平滑値を得る方法について説明したが、平滑値については、サイクル間の相関追尾を実施しなくても、サイクル内の同一の反射点付近の複数の観測値の平均等をとる処理によって得ることもできる。
【0047】
以上のステップS18の処理が終了すると、次に、サイクルが終了したかどうかが調べられる(ステップS20)。ステップS20において、サイクルが終了していないことが判断されると、次のサイクルの処理に移す処理が行われる(ステップS21)。その後、ステップS11に戻り、上述した処理が繰り返される。一方、ステップS20において、サイクルが終了したことが判断されると、このレーダ装置の処理は終了する。
【0048】
次に、第1の実施形態に係るレーダ装置について詳細に説明する。車載レーダ装置等の場合は、レーダ装置の設置位置が比較的高いため、図1を参照して既に説明したように、カバレッジ面2を水平にすると近距離下方の目標の検出が困難になる。この対策として、図9(b)に示すように、カバレッジ面2をロール方向に回転させる。カバレッジ面2の回転は、送受信器20からアンテナ10を介して送信される送受信ビームを制御することにより行われる。
【0049】
また、回転角は、観測範囲に応じて設定されるが、例えば同一車線と隣接車線を観測するためには、カバレッジ面2が隣接車線付近を向く(カバレッジ面2の一端部分が隣接車線に接する)ように設定される。これにより、図10に示すように、同一車線の近距離下方と隣接車線の2車線を観測することができる。なお、図10(a)は立体図であり、図10(b)は上面図である。
【0050】
これを定式化するために、図9を参照して、座標系の回転について説明する。座標を(X,Y,Z)として、X軸を中心にして角度αだけ回転した場合の変換後の座標(X’,Y’,Z’)は、
【数8】
【0051】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
となる。
【0052】
また、Y軸を中心にして角度βだけ回転した場合は、
となる。また、Y軸を中心にして角度β回転した場合は、
【数9】
【0053】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
β :ロール角
となる。
【0054】
また、Z軸を中心にして角度γだけ回転した場合は、
【数10】
【0055】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
γ :ヨー角
となる。
【0056】
したがって、座標回転として角度α、β、γを順に組み合わせた後の座標を(X’,Y’,Z’)とすると、
【数11】
【0057】
となる。
【0058】
これより、逆行列を用いて
【数12】
【0059】
逆行列を変換すると次式となる。
【数13】
【0060】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α、β、γ :ピッチ、ロール、ヨー角
以上の(11)式〜(13)式により、観測値(X’、Y’,Z’)から元の座標(X,Y,Z)に変換することができる。
【0061】
以上の点を踏まえて、例えばロール角βのみ(α=γ=0)回転した場合には、カバレッジ面がロール角により傾くため、実空間(水平面)での座標は、観測値(X’,Y’,Z’)を元に、後述する座標補正処理において、次式を用いて補正する。
【0062】
(9)式の逆行列演算より、
【数14】
【0063】
となり、高さZを無視すると
【数15】
【0064】
ここで、
(X’,Y’,Z’):観測カバレッジ面における座標
(X,Y,Z) :実空間における座標
β :カバレッジ面のロール角
と定式化できる。他の回転を加えた場合には、(13)式を用いることができる。
【0065】
図11は、第1の実施形態に係るレーダ装置の構成を示すブロック図である。このレーダ装置は、図2に示したレーダ装置の信号処理器30に、座標補正部40が追加されて構成されている。座標補正部40は、座標変換部38から送られてきた直交座標を示す信号に対して上述した座標補正処理を施し、相関追尾部39に送る。
【0066】
次に、上記のように構成される第1の実施形態に係るレーダ装置の概略の動作を、図12に示すフローチャートを参照しながら説明する。このフローチャートは、図3に示したフローチャートに、座標補正処理を行うステップS19が追加されて構成されている。すなわち、ステップS19では、座標補正部40は、座標変換部38から送られてきた座標を示す信号に対して上述した補正を施し、相関追尾部39に送る。
【0067】
すなわち、信号処理器30は、送受信器20からの送信に応答して該送受信器20で受信された信号を処理する。これにより、前方および回転により広角のカバレッジ面2が接する側の路面を観測することができる。
【0068】
以上説明したように、第1の実施形態に係るレーダ装置によれば、カバレッジ面2をロール方向に回転させることにより、レーダ装置の高さが高い場合であっても、水平面の広角の反射点のフェージングによる影響を抑圧した上で、同一車線および隣接車線を観測することができる。
【0069】
(第2の実施形態)
第2の実施形態に係るレーダ装置は、自動車や鉄道車両等において、車両の路面を観測して自速度を観測する。路面(真下付近)を観測する場合は、図13に示すようにカバレッジ面2を下方に向けるため、降雪等の影響で路面を観測できず、速度を検出できない場合がある。
【0070】
また、路面を観測できたとしても、送受信ビームが路面を照射する面積が小さくて同一の反射点(路面反射点)を観測できる時間が短くなり、その結果、非検出になったり相関追尾できなかったりして、速度を精度よく観測できない場合がある。なお、図13(a)は立体図、図13(b)は上面図および図13(c)は側面図である。
【0071】
この対策として、第2の実施形態に係るレーダ装置は、図14に示すように、カバレッジ面2のロール角により、カバレッジ面2の一方を観測する路面に向け、他方を高所の固定構造物に向ける。なお、図14(a)は立体図、図14(b)は上面図、図14(c)は前面図および図14(d)は側面図である。カバレッジ面2による測角により、路面側であるか構造物側であるかを判別できるため、各々の反射点を検出し、必要に応じて相関追尾することにより、自速度を算出することができる。この場合、異なる場所に基づく速度を算出できるため、降雪等の影響で一方が非検出であっても他方を検出でき、このような冗長性により安定して速度を得ることができる。また、路面を照射できる時間が進行方向に対して長いため、同一の反射点(路面反射点)を長く観測でき、非検出になりにくく、また相関追尾も簡易になる。
【0072】
以下、定式化を行う。観測カバレッジ面における観測値を(X’,Y’,Z’)とすると、高さを含めた実空間における座標は次式となる。
【数16】
【0073】
ここで、
(X’,Y’,Z’):観測カバレッジ面における座標
(X,Y,Z) :実空間における座標
β :カバレッジ面のロール角
観測カバレッジ面においては、Z’=0とすると、
【数17】
【0074】
となる。
【0075】
図15は、第2の実施形態に係るレーダ装置の構成を示すブロック図である。このレーダ装置は、第1の実施形態に係るレーダ装置に高さ判断部41が追加されて構成されている。高さ判断部41は、路面と高所構造物を抽出するためのスレショルドZth1とZth2を用いて、Zth1以下であれば路面と判断し、Zth2以上であれば高所構造物と判断する。それぞれ抽出した路面と高所構造物の反射点より、(4)式を用いて実空間(X,Y)軸での速度を抽出することができる。
【0076】
これにより、路面または高所構造物の少なくとも一方の反射点の速度を算出し、算出した速度と逆符号の自車速度を算出することができる。さらに、平滑速度を算出するには、反射点の位置(X,Y)を用いて、次のサイクルにおける(X,Y)との相関をとり、その観測値を元に追尾処理すればよい。相関追尾処理としては、上述した相関追尾(NN相関、α−β追尾方式)を用いることができ、これにより速度精度を向上させることができる。
【0077】
以上説明したように、第2の実施形態に係るレーダ装置によれば、カバレッジ面で検出される下部および上部の反射点を抽出することにより、他の反射点の影響を抑圧した上で、路面反射点と高所の構造物の反射点を抽出できるため、自車速度を高精度に検出できる。また、降雪の影響等で下部または上部の反射点のうち一方が検出できない場合であっても他方で補間することができるので、安定した速度抽出が可能になる。
【0078】
(第3の実施形態)
図16に示すように、高さ方向に反射点の幅を持つ目標(目標車両4または目標人物5)をクロスレンジ方向に観測する際に、カバレッジ面2を水平にすると、反射が大きい点を観測できず、非検出になる場合がある。なお、図16(a)は立体図ならびに図16(b)および図16(c)は側面図である。これを避けるために、図17に示すようにカバレッジ面2を垂直にして、クロスレンジ方向に横切る目標を観測する方法もあるが、観測時間が短くなるため、非検出になる場合がある。なお、図17(a)は立体図、図17(b)は側面図および図17(c)は上面図である。
【0079】
この対策として、第3の実施形態に係るレーダ装置は、図18に示すように、カバレッジ面2のロール角により、クロスレンジ方向に移動する目標の低い部分から高い部分まで、カバレッジ面2を横切るようにし、カバレッジ面2において測角する。なお、図18(a)は立体図ならびに図18(b)および図18(c)は側面図である。この測角値、ロール角、レンジ値を用いて、次式によりクロスレンジ位置を算出できる。このクロスレンジ位置の算出は、例えば、相関追尾部39で行うことができる。
【数18】
【0080】
高さZを無視すると
【数19】
【0081】
ここで、
(X’,Y’,Z’) :観測カバレッジ面における座標
(X,Y,Z):実空間における座標
β :カバレッジ面のロール角
以上により、クロスレンジ方向の目標位置の検出とその位置を用いた相関追尾ができる。
【0082】
以上説明したように、第3の実施形態に係るレーダ装置によれば、クロスレンジ方向に移動する高さのある目標物を検出する際に、ある高さの反射点のみでなく、高さ全体にわたる反射点を検出して追尾することができるので、安定した追尾が可能となる。
【0083】
(第4の実施形態)
レーダ装置1を高所に設置すると、図19(a)の側面図に示すように、レーダ装置1の真下付近を観測できず、カバレッジ面2を鉛直にすると、図19(b)の上面図に示すように、車線内の狭い範囲しか観測できない。
【0084】
この対策として、第4の実施形態に係るレーダ装置は、図20に示すようにカバレッジ面2を垂直にし、さらに、アジマス方向に角度を持たせて設定し、所定のレンジ−クロスレンジの観測範囲5の対角線上に斜めに向け、レンジ−クロスレンジを観測する。なお、図20(a)は側面図および図20(b)は上面図である。カバレッジ面2を下方に向けることを考慮すると、一般にはピッチ角α、ロール角βおよびヨー角γの全ての回転を伴うため、次式となる。
【数20】
【0085】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
β :ロール角(90度)
γ :ヨー角
ピッチ角αは観測幅を覆うように下方に設定する。ロール角βは90度を基本とする。ヨー角γは1つの車線を覆うように設定する。観測値Z’は、一般に0であり、変換後も高さ情報を用いない場合はZ=Z’=0とする。これにより、クロスレンジ方向の目標位置の検出とその位置を用いた相関追尾を行うことができる。
【0086】
以上説明したように、第4の実施形態に係るレーダ装置によれば、カバレッジ面を所定のレンジ−クロスレンジの観測範囲5の対角線上に設定することにより、所定の幅以上の車両は、観測範囲5においてレンジ−クロスレンジの両者を近距離真下付近まで観測することができる。
【0087】
(第5の実施形態)
カバレッジ面を水平にすると、目標の高さを観測できず、車種等を識別できない。この対策として、第5の実施形態に係るレーダ装置は、図21(a)の側面図および図21(b)の上面図に示すように、カバレッジ面2において測角し、測距値(レンジ)と測角値により、次式により目標の高さZ’を算出する。
【数21】
【0088】
ここで、
(X,Y,Z) :元の座標
(X’,Y’,Z’):変換後の座標
α :ピッチ角
β :ロール角(90度)
γ :ヨー角
ピッチ角αは観測幅を覆うように下方に設定する。ロール角βは90度を基本とする。ヨー角γは1つの車線を覆うように設定する。観測値Z’は、一般に0である。変換後の高さ情報Z’を用いて、普通車または大型車等の各々の高さに対応する所定のスレショルドZth(n)(n=1〜N、Nは識別する車両の種別)と比較することにより、目標の識別を行う。
【0089】
以上説明したように、第5の実施形態に係るレーダ装置によれば、第4の実施形態に係るレーダ装置に加えて、カバレッジ面のレンジ−クロスレンジ値を元にした座標変換により、目標の高さを抽出し、所定のスレショルドと比較することにより小型車または大型車等を識別することができる。
【0090】
以上のように、第1の実施形態〜第5の実施形態に係るレーダ装置によれば、広角のカバレッジ面の3軸(ロール/ピッチ/ヨー)の設定角度により、レーダ装置を比較的高所に設置した場合であっても、近距離真下から遠距離までの所定の範囲の目標物の検出/追尾能力を高めることができる。また、カバレッジ面を目標物の進行方向に対して斜めに設定することにより、カバレッジ内の不要な反射点を抑圧し、必要な反射点に対して立体的に幅を持たせても観測できる時間を長くすることにより、検出/追尾能力を高めることができる。
【0091】
なお、カバレッジ面2を斜めに設定する特殊な例として、図22に示すように、車載のレーダ装置でカバレッジ面2を鉛直にする場合があるが、これは第1の実施形態の内容に含まれる。なお、図22(a)は上面図、図22(b)は前面図および図22(c)は側面図である。また、第1の実施形態において、図23(a)の側面図および図23(b)の上面図に示すように、構造物の高所にレーダ装置1を固定して車線を観測する場合もある。
【0092】
また、第3の実施形態で説明したカバレッジ面2を斜めにクロスさせる場合の応用例として、図24に示すように、目標の斜め前方から観測し、カバレッジ面2を真横にする場合に比べて、観測時間を長くして検出能力を高めることもできる。なお、図24(a)は立体図、図24(b)は側面図および図24(c)は上面図である。
【0093】
以上のように、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0094】
10 アンテナ
11 アンテナ送信素子
12 アンテナ受信素子
20 送受信器
21 送信器
22 ミキサ
30 信号処理器
31 AD変換器
32 アップ系列ダウン系列抽出部
33 FFT部
34 DBF部
35 ペアリング部
36 測距・測速部
37 測角部
38 座標変換部
39 相関追尾部
40 座標補正部
41 高さ判断部
【特許請求の範囲】
【請求項1】
単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有するレーダ装置において、
前記広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器と、
前記送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および前記回転により前記広角のカバレッジ面が接する側の路面を観測する信号処理器と、
を備え、
前記信号処理器は、
前記送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部と、
前記座標変換部において得られた直交座標の信号を前記ロール方向の回転に応じて補正する座標補正部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記信号処理器は、
前記座標補正部で補正された信号に基づき送受信ビームの反射点の路面からの高さを算出して所定のスレショルドと比較することにより反射点が路面または高所の何れであるかを判断する高さ判断部を備え、前記高さ判断部の出力に基づき前記反射点の速度から自速度を算出することを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記信号処理器は、
前記座標補正部で補正された信号に基づきクロスレンジ方向を算出し、算出したクロスレンジ方向の目標を検出して相関追尾を行う相関追尾部を備えることを特徴とする請求項1又は請求項2記載のレーダ装置。
【請求項4】
前記信号処理器は、
広角のカバレッジ面を、所定のレンジ−クロスレンジの観測範囲の対角線上に斜めに向けて設定し、レンジ−クロスレンジを観測することを特徴とする請求項1乃至請求項3のいずれか1項記載のレーダ装置。
【請求項5】
前記信号処理器は、
前記座標補正部で補正された信号に基づき目標の高さを抽出し、抽出した目標を識別することを特徴とする請求項4記載のレーダ装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のレーダ装置が形成するカバレッジ面が、走行状態における水平面と非平行となるように設置されていることを特徴とする車両。
【請求項1】
単一または複数の送受信ビームによる広角のカバレッジ面および該カバレッジ面に直交する狭角のカバレッジ面を有するレーダ装置において、
前記広角のカバレッジ面を少なくともロール方向に回転させて送信する送受信器と、
前記送受信器からの送信に応答して該送受信器で受信された信号を処理することにより前方および前記回転により前記広角のカバレッジ面が接する側の路面を観測する信号処理器と、
を備え、
前記信号処理器は、
前記送受信器からの送信に応答して該送受信器で受信された信号に基づいて広角のカバレッジ面における測距および測角により得られた極座標の信号を直交座標の信号に変換する座標変換部と、
前記座標変換部において得られた直交座標の信号を前記ロール方向の回転に応じて補正する座標補正部と、
を備えることを特徴とするレーダ装置。
【請求項2】
前記信号処理器は、
前記座標補正部で補正された信号に基づき送受信ビームの反射点の路面からの高さを算出して所定のスレショルドと比較することにより反射点が路面または高所の何れであるかを判断する高さ判断部を備え、前記高さ判断部の出力に基づき前記反射点の速度から自速度を算出することを特徴とする請求項1記載のレーダ装置。
【請求項3】
前記信号処理器は、
前記座標補正部で補正された信号に基づきクロスレンジ方向を算出し、算出したクロスレンジ方向の目標を検出して相関追尾を行う相関追尾部を備えることを特徴とする請求項1又は請求項2記載のレーダ装置。
【請求項4】
前記信号処理器は、
広角のカバレッジ面を、所定のレンジ−クロスレンジの観測範囲の対角線上に斜めに向けて設定し、レンジ−クロスレンジを観測することを特徴とする請求項1乃至請求項3のいずれか1項記載のレーダ装置。
【請求項5】
前記信号処理器は、
前記座標補正部で補正された信号に基づき目標の高さを抽出し、抽出した目標を識別することを特徴とする請求項4記載のレーダ装置。
【請求項6】
請求項1乃至5のいずれか1項に記載のレーダ装置が形成するカバレッジ面が、走行状態における水平面と非平行となるように設置されていることを特徴とする車両。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】

【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2013−108880(P2013−108880A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254904(P2011−254904)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]