
レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラム
【課題】演算処理の負荷を増大させることなく適切に到来方向を推定可能なレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【解決手段】物標の方向を複数のアンテナ3の各受信信号に基づいて特定するレーダ装置1用の演算装置15であって、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部6を備える。
【解決手段】物標の方向を複数のアンテナ3の各受信信号に基づいて特定するレーダ装置1用の演算装置15であって、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部6を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムに関する。
【背景技術】
【0002】
アレーアンテナが受信したレーダ波の到来方向を推定するアルゴリズムとして、DBF(Digital Beam Forming)やPRISM(Propagator method based on an Improved Spatial-smoothing Matrix)、MUSIC(Multiple Signal Classification)、ESPR
IT(Estimation of Signal Parameters via Rotational Invariance Techniques)等が知られている(例えば、特許文献1−3を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−49123号公報
【特許文献2】特開2003−14843号公報
【特許文献3】特開2009−74990号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
MUSICやESPRITのように相関行列の固有値や固有ベクトルを用いる高精度のアルゴリズムでは、到来方向を推定する前に角度分離可能な到来波数(以下、角度分離可能数あるいは単に分離可能数という)を予め設定する必要がある。
【0005】
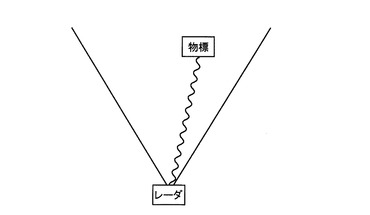
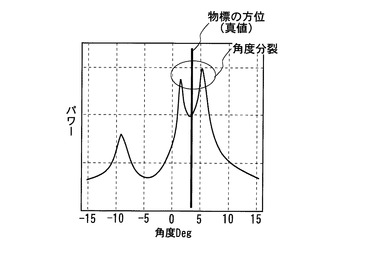
ここで、受信した到来波が理想的なものであれば、角度分離可能数が到来波数より多くても、図1に示すように実在する物標数が1つの場合、角度スペクトラムは一つのピークを示すことになる。しかし、現実的には所望波と相関性のあるマルチパス等に起因して、図2に示すように1つの物標に対し2つ以上のピークが生じて角度が分裂する場合がある。また、到来波数よりも多い角度分離可能数を設定して角度スペクトラムを算出することは演算負荷の増大にも繋がる。
【0006】
そこで、到来方向を推定する前に各受信信号による相関行列の固有値展開を行い、到来波数と同数の角度分離可能数を設定することが望ましい。到来波数は、AIC(Ahaike Information Criteria)やMDL(Minimum Descritim Length)等の到来波数を推定する公知のアルゴリズムを用いて得られる。しかし、到来波数の推定処理の精度は低いのが実情で、1〜2個のずれが生じる場合が多い。また、車載レーダ装置のように、使用できる演算回路の能力といったハードウェア資源に制約があり、更に、自車と他車との相対関係の変化が速い故に角度スペクトラムを数十ミリ秒周期で得る必要があるような仕様では、適切な到来波数を推定処理することが難しい。
【0007】
本発明は、このような課題に鑑みなされたものであり、演算処理の負荷を増大させることなく適切に到来方向を推定可能なレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明では、推定アルゴリズムの分離可能数の適否を、推定
角度から生成したモードベクトルと各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて判定することにした。
【0009】
詳細には、物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算装置は、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部を備える。
【0010】
任意の値を分離可能数として予め設定した推定アルゴリズムを使って得られる推定角度が、全ての物標の角度を推定し切れていない場合、推定された結果のデータには、角度が推定されていない物標のデータが含まれないことになる。しかし、各受信信号の入力ベクトルにはそのような物標の情報も含まれていることになるため、推定角度から生成したモードベクトルが各受信信号の入力ベクトルと相違していれば、両ベクトルの直交成分の大きさが大きくなる。そこで、上記レーダ装置用の演算装置は、この直交成分の大きさを評価することにより、設定した分離可能数の適否を判定している。
【0011】
上記レーダ装置用の演算装置であれば、角度推定後にその結果を評価して分離可能数の適否を判定しているため、演算量が多くかつ推定精度の低いAICやMDL等の演算を角度推定前に行なわなくて済み、演算処理の負荷を増大させることなく適切に到来方向の推定が可能になる。
【0012】
なお、前記演算部は、設定する前記分離可能数を逐次変更しながら前記所定の推定アルゴリズムによって得た物標の推定角度から、設定した各分離可能数に対応するモードベクトルをそれぞれ生成し、設定した分離可能数毎に算出した前記直交成分の大きさを互いに比較することにより、設定した各分離可能数の適否をそれぞれ判定するものであってもよい。分離可能数を複数種類に渡って設定し、各分離可能数の適否を判定することにより、適切な分離可能数の値を得ることができる。
【0013】
また、前記演算部は、前記直交成分の大きさが、前記レーダ装置に要求される仕様によって決定される所定の大きさの範囲内であれば、設定した前記分離可能数が適当と判定するものであってもよい。直交成分の大きさがこのような所定の大きさの範囲内であれば、推定アルゴリズムによって得た物標の推定角度から生成したモードベクトルが各受信信号の入力ベクトルに近似することになるため、分離可能数が概ね適当であることが判定できる。
【0014】
また、前記演算部は、前記直交成分の大きさに基づく判定処理によって適当と判定した前記分離可能数に基づく前記推定アルゴリズムの推定角度を出力するものであってもよい。これにより、適当な分離可能数に基づく適切な推定角度を用いた各種の制御を実現できる。
【0015】
なお、本発明は、方法やプログラム、上記演算部を備えたレーダ装置、或いはプログラムを記録した記録媒体として捉えることもできる。
【0016】
例えば、本発明は、物標の方向を特定するレーダ装置であって、複数のアンテナと、予め設定した分離可能数に応じた数の物標の角度を前記複数のアンテナの各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した
前記分離可能数の適否を判定する演算部と、を備えるものであってもよい。
【発明の効果】
【0017】
演算処理の負荷を増大させることなく適切に到来方向を推定可能になる。
【図面の簡単な説明】
【0018】
【図1】レーダ装置と物標との関係を示した図である。
【図2】角度が分裂した角度スペクトラムの一例である。
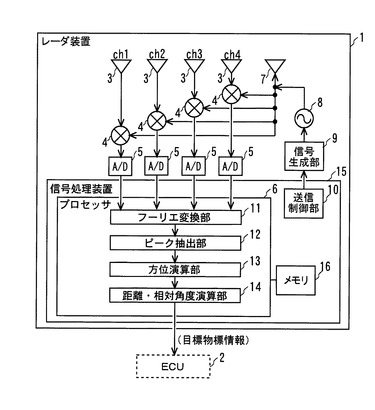
【図3】レーダ装置の構成図である。
【図4】レーダ装置で処理される信号の波形を示した図である。
【図5】メインの処理を示すフローチャートである。
【図6】アップビート周波数成分の周波数スペクトラムである。
【図7】ダウンビート周波数成分の周波数スペクトラムである。
【図8】角度スペクトラムである。
【図9】各ピークの角度とパワーの一例である。
【図10】ECUへ送られるデータの一例である。
【図11】角度分離可能数を修正する処理の概念図である。
【図12】メインの処理を示すフローチャートである。
【図13】モードベクトルを説明する図である。
【図14】直交成分の大きさを例示したグラフである。
【図15】第一の実験の概要を示した図である。
【図16】第一の実験結果を示したグラフである。
【図17】第二の実験の概要を示した図である。
【図18】第二の実験結果を示したグラフである。
【発明を実施するための形態】
【0019】
以下、本願発明を実施するための形態を例示的に説明する。以下に示す実施形態は例示であり、本願発明の技術的範囲をこれらに限定するものではない。
【0020】
図3は、本実施形態に係るレーダ装置1の構成図である。レーダ装置1は、車両に搭載されて車両の周辺をレーダで監視し、他の車両や障害物等の物標を検知する。物標の検知結果は、車両を制御するECU(Electrical Control Unit)2に出力されて車両の制御
等に用いられる。但し、本実施形態に係るレーダ装置は、車両に搭載する以外の各種用途(例えば、飛行中の航空機や航行中の船舶の監視等)に用いてもよい。
【0021】
レーダ装置1は、等間隔に配置された受信アンテナ3(ch1−4)、各受信アンテナ3に各々繋がるミキサ4(ch1−4)、各ミキサ4に各々繋がるAD(Analog to Digital)変換器5(ch1−4)、各AD変換器5のデータを処理するプロセッサ6を含む
信号処理装置15を備える。また、レーダ装置1は、送信アンテナ7、発振器8、信号生成部9、送信制御部10を備える。
【0022】
なお、レーダ装置1は、このように受信アンテナ毎に専用の受信回路を設けてもよいが、全受信アンテナによる受信信号をまとめて受信する受信回路を設けてもよい。この場合、時分割で受信回路が対応する受信アンテナを順次切り替える制御が必要となるが、レーダ装置1の回路構成をコンパクトにできる。
【0023】
また、レーダ装置1は、受信アンテナと送信アンテナとを独立に設けているが、受信アンテナが送信アンテナを兼ねるようにしてもよい。この場合、各アンテナは、レーダ波を送信した直後に受信状態に切り替わり、自身が送信したレーダ波の反射波を受信させることが可能である。
【0024】
レーダ装置1は、車両から電力が供給されるとプロセッサ6がコンピュータプログラムを実行し、フーリエ変換部11やピーク抽出部12、方位演算部13、距離・相対角度演算部14といった機能部を実現する。これらの機能部は、プロセッサ6がメモリ16と協働してコンピュータプログラムを実行することによって実現される機能部であるが、説明の便宜上、図3ではプロセッサ6内に各機能部を図示している。なお、これらの機能部は、必ずしもソフトウェアで実現されるものに限定されるものでなく、例えば、プロセッサ6の内部あるいは外部に配置された専用の演算回路によってその全部または一部が実現されてもよい。
【0025】
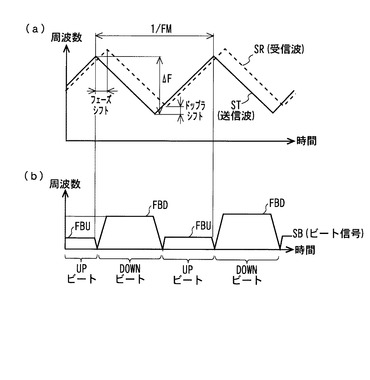
図4は、レーダ装置1で処理される信号の波形を示したものである。レーダ装置1は、FM−CW(Frequency Modulation−Continuous Wave)方式を採用しており、信号生
成部9で生成される三角波状に電圧が変化する変調信号に基づき、発振器8で変調して図4(a)に示すような三角波状に周波数が変化する送信波STを送信する。そして、物標から反射した受信波SRをミキサ4(ch1−4)が送信波STとミキシングすることにより、図4(b)に示すようなビート信号SBを得る。図4において、送信波STと受信波SRとの位相差(フェーズシフト)が物標とレーダ装置との距離に比例して増減し、送信波STと受信波SRとの周波数差(ドップラシフト)が物標とレーダ装置との相対速度に比例して増減する。図4の記号FMは、信号生成部9が生成する三角波の周波数である。なお、相対速度や距離の異なる物標が複数存在する場合、各アンテナにはフェーズシフト量やドップラシフト量の異なる反射波が複数受信され、各ミキサ4(ch1−4)から得られるビート信号SBには各物標に対応した様々な成分が含まれることになるが、図4では理解を容易にするため、1つの物標が存在する場合の波形を例示している。
【0026】
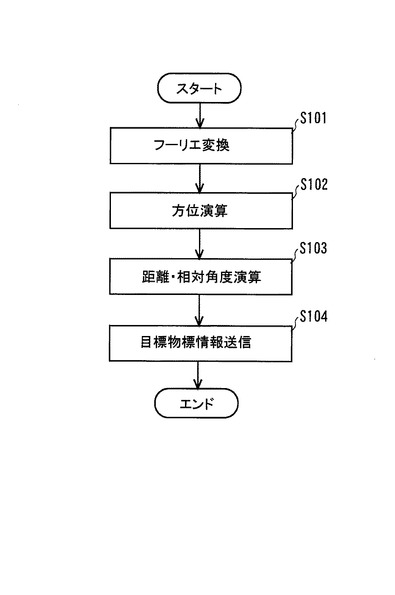
以下、車両からレーダ装置1へ電力が供給されるとプロセッサ6が実行する処理フローについて、図5のフローチャートに沿って説明する。プロセッサ6は、車両の駆動源が作動状態、すなわち、駆動源が内燃機関であればエンジンが始動し、ハイブリッドシステムやEV(Electric Car)システムであればシステム電源がオンになると、以下に示す処理フローを繰り返す。
【0027】
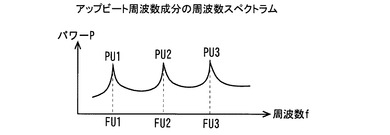
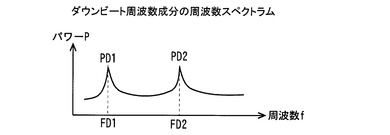
(ステップS101)プロセッサ6は、ビート信号SBのアップビート周波数成分FBUとダウンビート周波数成分FBDのそれぞれについてch毎にフーリエ変換を行い、図6に示すようなアップビート周波数成分FBUの周波数スペクトラムおよび図7に示すようなダウンビート周波数成分FBDの周波数スペクトラムを得る。
【0028】
各受信アンテナ3(ch1−4)は同じ物標からの反射波を受信するため、フーリエ変換では同じピーク周波数を有する同じ形状の周波数スペクトラムが各受信アンテナ3(ch1−4)のそれぞれから得られる。但し、各受信アンテナ3(ch1−4)で位相は異なるため、同じピーク周波数であっても位相はアンテナ毎に異なる。例えば、受信アンテナ3(ch1)の周波数スペクトラムのピークPU1(ch1)と受信アンテナ3(ch2)の周波数スペクトラムのピークPU1(ch2)は、周波数については互いに同じであるが、位相については相違している。
【0029】
プロセッサ6は、フーリエ変換によって得たアップビート周波数成分FBUとダウンビート周波数成分FBDのそれぞれの周波数スペクトラムから、所定パワー以上のピークを抽出し、抽出したピークの周波数、パワー、及び位相を抽出する。
【0030】
(ステップS102)周波数スペクトラムのピークには複数の物標の情報が含まれ得るため、1つのピークから物標を分離し、分離した物標の角度を推定する必要がある。そのため、プロセッサ6は、アップビート周波数成分FBUとダウンビート周波数成分FBD
のそれぞれについて、全受信アンテナ3(ch1−4)で周波数が互いに同じピーク(例えば、アップビート周波数成分FBU側であればピークPU1(ch1)とピークPU1(ch2)とピークPU1(ch3)とピークPU1(ch4)が互いに同じ周波数FU1のピークであり、ダウンビート周波数成分FBD側であればピークPD1(ch1)とピークPD1(ch2)とピークPD1(ch3)とピークPD1(ch4)が互いに同じ周波数FD1のピークである)のものを元に、図8に示すような角度スペクトラムを演算により求める。
【0031】
角度スペクトラムの求め方としては、CAPON法やDBF法等の各種方式が考案されているが、本実施形態に係るレーダ装置1のプロセッサ6は、到来波数推定アルゴリズムであるAICやMDLを用いて角度分離可能数として到来波数を予め設定する必要のある所定の角度推定方式(例えば、MUSICやESPRIT、或いは最尤推定法等)に基づいて角度スペクトラムを得る。例えば、ESPRITの場合、反射波の波源は広がりを持たない点波源であり、反射波は全ての受信アンテナに対して平行に入射する平面波であると仮定して、受信信号から相関行列を形成し、固有値と固有ベクトルの性質を基に反射波の到来方向を推定している。よって、相関行列や固有値を取り扱うにあたって到来波数の情報が予め必要となる。
【0032】
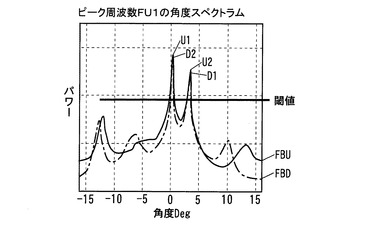
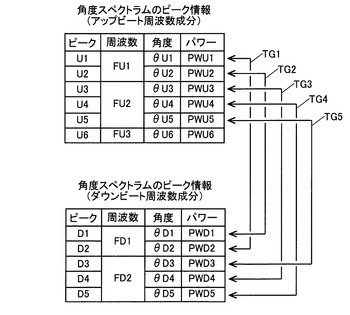
プロセッサ6は、周波数スペクトラムのピーク周波数毎に角度スペクトラムを所定の角度推定方式で算出する。例えば、図6および図7に示した周波数スペクトラムを例にとれば、プロセッサ6は、5つのピークの周波数(FU1−3、FD1−2)毎に角度スペクトラムを算出する。図8はアップビート周波数成分FBUにおけるピーク周波数FU1の角度スペクトラムの一例であり、それに対応する同じ物標から得られるダウンビート周波数成分FBDにおけるピーク周波数(例えばFD1とする)の角度スペクトラムを併記している。そして、5つのピーク周波数(FU1−3、FD1−2)の各角度スペクトラムについて、角度スペクトラムのピークの角度とパワーを抽出する。5つのピーク周波数(FU1−3、FD1−2)の各角度スペクトラムの各ピークの角度とパワーの一例を図9に示す。
【0033】
(ステップS103)プロセッサ6は、各角度スペクトラムの各ピークの角度とパワーを抽出したら、各ピークのペアリングを行ない、実在する物標の特定を行なう。すなわち、プロセッサ6は、アップビート周波数成分FBUの角度スペクトラムの各ピークとダウンビート周波数成分FBDの角度スペクトラムの各ピークとの間で、角度やパワーが互いに近似しているもの同士をペアリングする。例えば、図8に例示した角度スペクトラムでは、アップビート周波数成分FBUにおけるピーク周波数FU1のピークU1とピークU2の角度およびパワーが、ダウンビート周波数成分FBDにおけるピーク周波数FD1のピークD2とピークD1の角度およびパワーにそれぞれ近似している。例えば、ピークU1とピークD2は互いに角度が約0°で近似しており、ピークU2とピークD1は互いに角度が約3°で近似している。よって、図9に示すピークU1の角度θU1およびパワーPWU1がピークD2の角度θD2およびパワーPWD2と互いに近似していて、ピークU1とピークD2がペアリングされるので、ピークU1とピークD2が物標TG1を示していることが特定される。
【0034】
プロセッサ6は、アップビート周波数成分FBUの角度スペクトラムの各ピーク(ピークU1−6)とダウンビート周波数成分FBDの角度スペクトラムの各ピーク(ピークD1−5)とを互いにペアリングすることにより、図9に示すように、物標TG1−5の5つの物標を特定する。なお、アップビート周波数成分FBUの角度スペクトラムのピークU6は、ダウンビート周波数成分FBDの角度スペクトラムの何れのピークにもペアリングされていない。よって、ピークU6は、内部ノイズ等に起因して表れたピークであり、実在する物標に因るものでないことが判る。
【0035】
プロセッサ6は、ペアリングされたピーク周波数に基づいて、各物標の角度や距離、相対速度を算出する。ここで、レーダ波の伝搬速度をC、信号生成部9が生成する三角波の変調周波数をFM、三角波の中心周波数をF0、三角波の変調幅をΔFとすると、各物標の距離R(R1〜R5)および相対速度V(V1〜V5)は、次式によって導かれる。
R=((FU+FD)・C)/(8・ΔF・FM)
V=((FD+FD)・C)/(4・F0)
【0036】
また、各物標の角度は、ペアリングされたアップビート周波数成分FBUのピークとダウンビート周波数成分FBDのピークの角度が互いにほとんど同じではあるが、より精度を高めるため、各物標の角度D(D1〜D5)は、次式より導く。
D=(θU+θD)/2
【0037】
(ステップS104)プロセッサ6は、各物標の角度、距離および相対速度のデータをECU2に出力する。例えば、角度スペクトラムの各ピークから図9に示すような5つの物標が特定された場合、プロセッサ6からECU2へ図10に示すようなデータが送られる。各物標の角度、距離および相対速度のデータは、ECU2で車両の制御等に用いられる。
【0038】
ここで、プロセッサ6は、上記方位演算(ステップS102)において角度スペクトラムを得るにあたり、以下のような処理を実行する。以下に示す処理は、適正な角度スペクトラムを得ることを目的にするものであり、角度分離可能数を変えながら算出した複数の角度推定結果を基に、直交成分の大きさ、すなわち、到来波が推定角度から到来した際の各アンテナの入力ベクトルの基底を変換したモードベクトル基底の係数のノルム(複素ベクトルの長さ)の大きさを評価し、適正な角度分離可能数を特定するものである。
【0039】
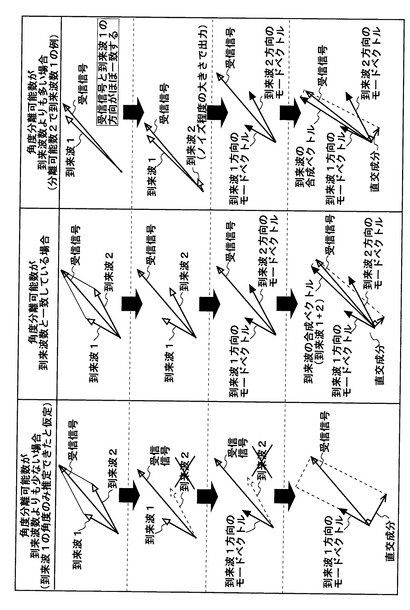
図11は、以下に示す処理の概念を示した図である。図面では4次元以上の空間を図示できないため、図11では受信アンテナのch数を暫定的に2つとし、便宜的に3次元で図示している。まず、角度分離可能数が到来波数よりも少ない場合を考える(図11の左欄を参照)。
【0040】
到来波1と到来波2が存在する場合、各アンテナの入力ベクトルは2つの到来波を合成したベクトルになる。到来波1と到来波2は何れもノイズより明らかに大きいものとする。ここで、到来波数よりも少ない角度分離可能数で到来方向を推定した場合には、何れか一方の到来波の角度のみが推定され、他方の到来波の角度は推定し切れないことになる。図11の左欄の例では、到来波1の角度のみが算出され、到来波2の角度は算出されなかったことを示している。この場合、モードベクトルは到来波1の角度のみが生成されることになるので、モードベクトルと入力ベクトルとがなす角度が大きくなるため直交成分の大きさが大きくなる。
【0041】
一方、到来波数に一致する角度分離可能数で到来方向を推定した場合には、到来波1と到来波2の両方の角度がそれぞれ推定されることになる。図11の中央欄の例では、到来波1と到来波2の両方の角度が算出されたことを示している。この場合、モードベクトルは到来波1と到来波2の両方の角度が生成されることになるので、到来波1と到来波2の合成モードベクトルの方向は、基本的に入力ベクトルの方向とほぼ一致する。従って、合成モードベクトルと入力ベクトルとがなす角度は小さいため、合成モードベクトルの直交成分の大きさが小さくなる。
【0042】
また、角度分離可能数が、到来波数より多い場合には、モードベクトルの数が到来波数と一致する場合と一つのモードベクトルが分裂する場合とが生じるが、そのような場合で
あっても、図11の右欄に示すように直交成分はいずれの場合も小さくなる。
【0043】
以下に説明する処理フローは、図11を使って説明した上記概念に基づいており、プロセッサ6が角度スペクトラムを得る際に実行するものである。以下、図12に示すフローチャートに沿って説明する。
【0044】
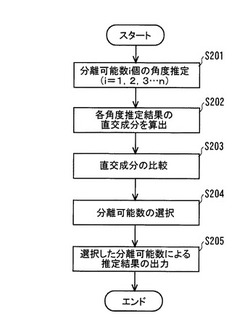
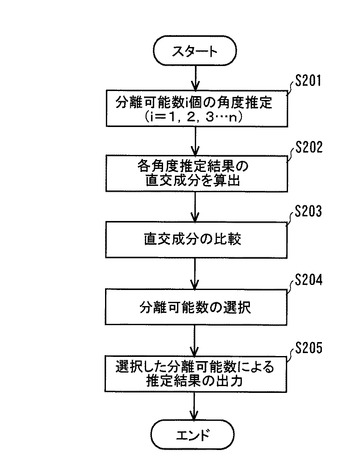
(ステップS201)プロセッサ6は、角度分離可能数を1からnまで逐次変更しながら、上記所定の角度推定方式に基づいてn個の角度推定結果を算出し、メモリ16に格納する。角度推定の回数(スナップショット数)は任意である。角度分離可能数は、空間平均処理において平均をとる受信アンテナ数(1つのサブアレーを構成する受信アンテナ数)を変えてやることにより変更可能である。
【0045】
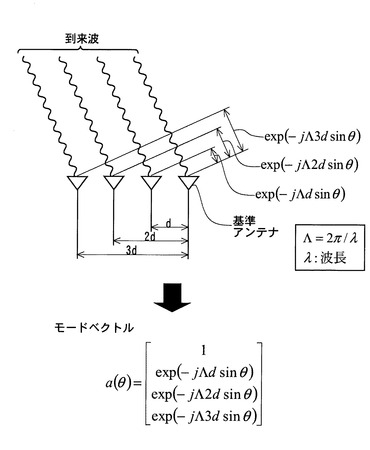
(ステップS202)プロセッサ6は、算出したn個の角度推定結果の各々について、直交成分をそれぞれ算出する。例えば、角度分離可能数が3の場合には角度推定結果として3つの到来方向の角度が算出されているので、これらをθ1,θ2,θ3とする。この場合、各角度θ1〜θ3の各モードベクトルは、以下のように記号化できる。
【数1】

【0046】
ここで、各モードベクトルを以下のように行列化する。
【数2】
【0047】
なお、モードベクトルa(θ)とは、θ方向から振幅1の到来波が各受信アンテナ3(ch1−4)に到来した際の理想的な受信信号を並べて複素表示したものであり、例えば、図13のように複素数のベクトルで示される。
【0048】
次に、各角度(θ1〜θ3)に対応する3つのモードベクトルに直交するベクトルPを、固有値分解等を行わず比較的高速な演算が可能なプロパゲータ(Propagator)法を用いて以下の計算で求める。
【0049】
方向行列Aの1行目から3行目までを抽出した行列をA1とし、方向行列Aの4行目を抽出した行列をA2とする。
【数3】
【0050】
行列A1は、方向行列Aの1行目から3行目までを抽出したものであるから、3つの受信アンテナ3(ch1−3)によって構成されるサブアレーの受信信号の方向行列を表している。また、行列A2は、方向行列Aの4行目を抽出したものであるから、受信アンテナ3(ch4)の受信信号の方向行列を表している。ここで、3つのモードベクトルに直交するベクトルPは、以下の式によって表される。なお、tは転置を表し、Hは複素共役転置を表す。
【数4】
【0051】
そして、直交成分の大きさを正確に算出するために、以下の式でベクトルPの大きさをモードベクトルと同じ大きさに調整しておく。
【数5】
【0052】
そして、モードベクトルに直交成分を加えた行列を以下のように定める。
【数6】
【0053】
また、各受信アンテナ3(ch1−4)の受信信号をY1〜Y4と定め、受信信号の入
力ベクトルYを以下のように定義する。
【数7】
【0054】
そして、入力ベクトルYの基底を、以下の数式によって標準基底からモードベクトル基底へ変換すると、モードベクトルおよび直交成分の基底のそれぞれの係数を求めることができる。なお、ここでは直交成分の基底の係数を求めればよいため、下記のbn1−3の演算は省略してもよい。
【数8】
【0055】
ここで求めた複素ベクトルbn4の長さ(ノルム)が、直交成分の大きさとなる。
【0056】
(ステップS203)プロセッサ6は、角度分離可能数1からnまでの各角度推定結果の直交成分の大きさを算出したら、これらを比較する。角度分離可能数が到来波数よりも少ない場合、推定した角度をモードベクトルに代入して得たベクトルと実際の受信信号のベクトルとに基づく直交成分の大きさが大きくなる。一方、角度分離可能数が到来波数よりも多い場合、推定した角度をモードベクトルに代入して得たベクトルと実際の受信信号のベクトルとに基づく直交成分の大きさが小さくなる。この結果、角度分離可能数1からnまでの各角度推定結果の直交成分の大きさは、例えば、次のようになる。
【0057】
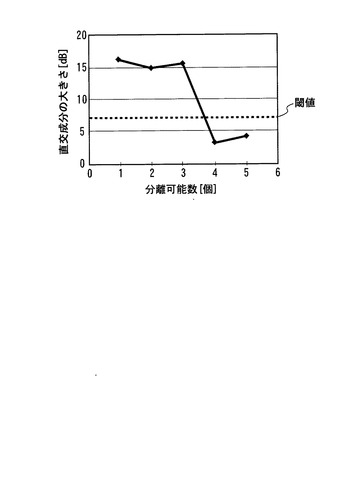
図14は、各角度推定結果の直交成分の大きさを例示したグラフである。図14に示した例では、角度分離可能数が1から3の場合に直交成分の大きさが閾値よりも大きく、角度分離可能数が4から5の場合に直交成分の大きさが閾値よりも小さくなる。なお、閾値は、レーダ装置1に要求される仕様によって適宜決定するものであり、到来波が理想的なものであれば受信信号に含まれるノイズの大きさから若干の余裕を持たせて設定すればよいが、実機では機体毎に誤差があるため、値を適宜適合させる。
【0058】
(ステップS204)プロセッサ6は、直交成分の比較結果から、適切な角度分離可能数を選択する。適切な角度分離可能数とは、到来波数以上であって演算負荷が最も小さくなる値であり、具体的には、直交成分の大きさが閾値以下となる角度分離可能数のうちの最小値である。例えば、図14に示す例であれば、適切な角度分離可能数は4になる。
【0059】
(ステップS205)プロセッサ6は、選択した角度分離可能数に基づく角度推定結果
をECU2に出力する。
【0060】
本実施形態に係るレーダ装置1は、角度スペクトラムを得るにあたり、直交成分の大きさに基づく最適な角度分離可能数を得ているため、演算処理の負荷を増大させることなく適切に到来方向を推定することが可能である。従って、車載される場合に課される、使用できる演算回路の能力等の制約があり、更に、自車と他車との相対関係の変化が速い故に角度スペクトラムを数十ミリ秒周期で得る必要があるような場合であっても、適切に到来方向を推定することが可能である。なお、上記ステップS201では、角度分離可能数を1からnまで逐次変更していたが、角度分離可能数を繰り上げ、或いは繰り下げるごとに直交成分を比較してもよい。
【0061】
レーダ装置1の効果を検証するため、2つのケースを想定した実験を行なった。以下、実験結果を従来例と比較しながら説明する。
【0062】
第一の実験は、図15に示すように、自車と先行車とが同様の速度で同じ方向に向かって走行しているケースについて行なったものである。第一の実験の結果を、図16に示す。本ケースでは、自車と他車とが同様の速度で同じ方向に向かって走行しているため、両者の相対的な位置関係は一定であり、理論的にはレーダ装置1から一定の角度のデータが出力される。しかしながら、図16の実験データに示されるように、分離可能数の判定を行なわない従来例では、1つの物標(他車)に対して2以上の角度分離可能数を設定していたため、マルチパス等に起因して他車の方位が定まらないことがあった。一方、上記レーダ装置1であれば、角度分離可能数の判定処理がなされているため、1つの物標(他車)に対して1つの角度分離可能数のデータが選択され、レーダ装置1から一定の角度のデータが出力されていることが判る。
【0063】
また、第二の実験は、図17に示すように、自車が2つの障害物の間を通り抜けるケースについて行なったものである。第二の実験の結果を、図17に示す。本ケースでは、自車が2つの障害物の間を通り抜けるため、自車の進行に伴って2つの障害物の方位が徐々に広がっていくデータが理論的にはレーダ装置1から出力される。しかしながら、図18の実験データに示されるように、分離可能数の判定を行なわない従来例では、2つの物標(障害物)に対して3以上の角度分離可能数を設定していたため、マルチパス等に起因して3つ以上の物標が障害物として出力されることがあった(例えば、図18のグラフの破線部分を参照)。一方、上記レーダ装置1であれば、角度分離可能数の判定処理がなされているため、2つの物標(障害物)に対して2つの角度分離可能数のデータが選択され、レーダ装置1から2つの障害物のデータが適正に出力されていることが判る。
【符号の説明】
【0064】
1・・レーダ装置,2・・ECU,3・・受信アンテナ,4・・ミキサ,5・・AD変換器,6・・プロセッサ,7・・送信アンテナ,8・・発振器,9・・信号生成部,10・・送信制御部,11・・フーリエ変換部,12・・ピーク抽出部,13・・方位演算部,14・・距離・相対角度演算部,15・・信号処理装置,16・・メモリ
【技術分野】
【0001】
本発明は、レーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムに関する。
【背景技術】
【0002】
アレーアンテナが受信したレーダ波の到来方向を推定するアルゴリズムとして、DBF(Digital Beam Forming)やPRISM(Propagator method based on an Improved Spatial-smoothing Matrix)、MUSIC(Multiple Signal Classification)、ESPR
IT(Estimation of Signal Parameters via Rotational Invariance Techniques)等が知られている(例えば、特許文献1−3を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−49123号公報
【特許文献2】特開2003−14843号公報
【特許文献3】特開2009−74990号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
MUSICやESPRITのように相関行列の固有値や固有ベクトルを用いる高精度のアルゴリズムでは、到来方向を推定する前に角度分離可能な到来波数(以下、角度分離可能数あるいは単に分離可能数という)を予め設定する必要がある。
【0005】
ここで、受信した到来波が理想的なものであれば、角度分離可能数が到来波数より多くても、図1に示すように実在する物標数が1つの場合、角度スペクトラムは一つのピークを示すことになる。しかし、現実的には所望波と相関性のあるマルチパス等に起因して、図2に示すように1つの物標に対し2つ以上のピークが生じて角度が分裂する場合がある。また、到来波数よりも多い角度分離可能数を設定して角度スペクトラムを算出することは演算負荷の増大にも繋がる。
【0006】
そこで、到来方向を推定する前に各受信信号による相関行列の固有値展開を行い、到来波数と同数の角度分離可能数を設定することが望ましい。到来波数は、AIC(Ahaike Information Criteria)やMDL(Minimum Descritim Length)等の到来波数を推定する公知のアルゴリズムを用いて得られる。しかし、到来波数の推定処理の精度は低いのが実情で、1〜2個のずれが生じる場合が多い。また、車載レーダ装置のように、使用できる演算回路の能力といったハードウェア資源に制約があり、更に、自車と他車との相対関係の変化が速い故に角度スペクトラムを数十ミリ秒周期で得る必要があるような仕様では、適切な到来波数を推定処理することが難しい。
【0007】
本発明は、このような課題に鑑みなされたものであり、演算処理の負荷を増大させることなく適切に到来方向を推定可能なレーダ装置用の演算装置、レーダ装置、レーダ装置用の演算方法およびプログラムを提供することを課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明では、推定アルゴリズムの分離可能数の適否を、推定
角度から生成したモードベクトルと各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて判定することにした。
【0009】
詳細には、物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算装置は、予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部を備える。
【0010】
任意の値を分離可能数として予め設定した推定アルゴリズムを使って得られる推定角度が、全ての物標の角度を推定し切れていない場合、推定された結果のデータには、角度が推定されていない物標のデータが含まれないことになる。しかし、各受信信号の入力ベクトルにはそのような物標の情報も含まれていることになるため、推定角度から生成したモードベクトルが各受信信号の入力ベクトルと相違していれば、両ベクトルの直交成分の大きさが大きくなる。そこで、上記レーダ装置用の演算装置は、この直交成分の大きさを評価することにより、設定した分離可能数の適否を判定している。
【0011】
上記レーダ装置用の演算装置であれば、角度推定後にその結果を評価して分離可能数の適否を判定しているため、演算量が多くかつ推定精度の低いAICやMDL等の演算を角度推定前に行なわなくて済み、演算処理の負荷を増大させることなく適切に到来方向の推定が可能になる。
【0012】
なお、前記演算部は、設定する前記分離可能数を逐次変更しながら前記所定の推定アルゴリズムによって得た物標の推定角度から、設定した各分離可能数に対応するモードベクトルをそれぞれ生成し、設定した分離可能数毎に算出した前記直交成分の大きさを互いに比較することにより、設定した各分離可能数の適否をそれぞれ判定するものであってもよい。分離可能数を複数種類に渡って設定し、各分離可能数の適否を判定することにより、適切な分離可能数の値を得ることができる。
【0013】
また、前記演算部は、前記直交成分の大きさが、前記レーダ装置に要求される仕様によって決定される所定の大きさの範囲内であれば、設定した前記分離可能数が適当と判定するものであってもよい。直交成分の大きさがこのような所定の大きさの範囲内であれば、推定アルゴリズムによって得た物標の推定角度から生成したモードベクトルが各受信信号の入力ベクトルに近似することになるため、分離可能数が概ね適当であることが判定できる。
【0014】
また、前記演算部は、前記直交成分の大きさに基づく判定処理によって適当と判定した前記分離可能数に基づく前記推定アルゴリズムの推定角度を出力するものであってもよい。これにより、適当な分離可能数に基づく適切な推定角度を用いた各種の制御を実現できる。
【0015】
なお、本発明は、方法やプログラム、上記演算部を備えたレーダ装置、或いはプログラムを記録した記録媒体として捉えることもできる。
【0016】
例えば、本発明は、物標の方向を特定するレーダ装置であって、複数のアンテナと、予め設定した分離可能数に応じた数の物標の角度を前記複数のアンテナの各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した
前記分離可能数の適否を判定する演算部と、を備えるものであってもよい。
【発明の効果】
【0017】
演算処理の負荷を増大させることなく適切に到来方向を推定可能になる。
【図面の簡単な説明】
【0018】
【図1】レーダ装置と物標との関係を示した図である。
【図2】角度が分裂した角度スペクトラムの一例である。
【図3】レーダ装置の構成図である。
【図4】レーダ装置で処理される信号の波形を示した図である。
【図5】メインの処理を示すフローチャートである。
【図6】アップビート周波数成分の周波数スペクトラムである。
【図7】ダウンビート周波数成分の周波数スペクトラムである。
【図8】角度スペクトラムである。
【図9】各ピークの角度とパワーの一例である。
【図10】ECUへ送られるデータの一例である。
【図11】角度分離可能数を修正する処理の概念図である。
【図12】メインの処理を示すフローチャートである。
【図13】モードベクトルを説明する図である。
【図14】直交成分の大きさを例示したグラフである。
【図15】第一の実験の概要を示した図である。
【図16】第一の実験結果を示したグラフである。
【図17】第二の実験の概要を示した図である。
【図18】第二の実験結果を示したグラフである。
【発明を実施するための形態】
【0019】
以下、本願発明を実施するための形態を例示的に説明する。以下に示す実施形態は例示であり、本願発明の技術的範囲をこれらに限定するものではない。
【0020】
図3は、本実施形態に係るレーダ装置1の構成図である。レーダ装置1は、車両に搭載されて車両の周辺をレーダで監視し、他の車両や障害物等の物標を検知する。物標の検知結果は、車両を制御するECU(Electrical Control Unit)2に出力されて車両の制御
等に用いられる。但し、本実施形態に係るレーダ装置は、車両に搭載する以外の各種用途(例えば、飛行中の航空機や航行中の船舶の監視等)に用いてもよい。
【0021】
レーダ装置1は、等間隔に配置された受信アンテナ3(ch1−4)、各受信アンテナ3に各々繋がるミキサ4(ch1−4)、各ミキサ4に各々繋がるAD(Analog to Digital)変換器5(ch1−4)、各AD変換器5のデータを処理するプロセッサ6を含む
信号処理装置15を備える。また、レーダ装置1は、送信アンテナ7、発振器8、信号生成部9、送信制御部10を備える。
【0022】
なお、レーダ装置1は、このように受信アンテナ毎に専用の受信回路を設けてもよいが、全受信アンテナによる受信信号をまとめて受信する受信回路を設けてもよい。この場合、時分割で受信回路が対応する受信アンテナを順次切り替える制御が必要となるが、レーダ装置1の回路構成をコンパクトにできる。
【0023】
また、レーダ装置1は、受信アンテナと送信アンテナとを独立に設けているが、受信アンテナが送信アンテナを兼ねるようにしてもよい。この場合、各アンテナは、レーダ波を送信した直後に受信状態に切り替わり、自身が送信したレーダ波の反射波を受信させることが可能である。
【0024】
レーダ装置1は、車両から電力が供給されるとプロセッサ6がコンピュータプログラムを実行し、フーリエ変換部11やピーク抽出部12、方位演算部13、距離・相対角度演算部14といった機能部を実現する。これらの機能部は、プロセッサ6がメモリ16と協働してコンピュータプログラムを実行することによって実現される機能部であるが、説明の便宜上、図3ではプロセッサ6内に各機能部を図示している。なお、これらの機能部は、必ずしもソフトウェアで実現されるものに限定されるものでなく、例えば、プロセッサ6の内部あるいは外部に配置された専用の演算回路によってその全部または一部が実現されてもよい。
【0025】
図4は、レーダ装置1で処理される信号の波形を示したものである。レーダ装置1は、FM−CW(Frequency Modulation−Continuous Wave)方式を採用しており、信号生
成部9で生成される三角波状に電圧が変化する変調信号に基づき、発振器8で変調して図4(a)に示すような三角波状に周波数が変化する送信波STを送信する。そして、物標から反射した受信波SRをミキサ4(ch1−4)が送信波STとミキシングすることにより、図4(b)に示すようなビート信号SBを得る。図4において、送信波STと受信波SRとの位相差(フェーズシフト)が物標とレーダ装置との距離に比例して増減し、送信波STと受信波SRとの周波数差(ドップラシフト)が物標とレーダ装置との相対速度に比例して増減する。図4の記号FMは、信号生成部9が生成する三角波の周波数である。なお、相対速度や距離の異なる物標が複数存在する場合、各アンテナにはフェーズシフト量やドップラシフト量の異なる反射波が複数受信され、各ミキサ4(ch1−4)から得られるビート信号SBには各物標に対応した様々な成分が含まれることになるが、図4では理解を容易にするため、1つの物標が存在する場合の波形を例示している。
【0026】
以下、車両からレーダ装置1へ電力が供給されるとプロセッサ6が実行する処理フローについて、図5のフローチャートに沿って説明する。プロセッサ6は、車両の駆動源が作動状態、すなわち、駆動源が内燃機関であればエンジンが始動し、ハイブリッドシステムやEV(Electric Car)システムであればシステム電源がオンになると、以下に示す処理フローを繰り返す。
【0027】
(ステップS101)プロセッサ6は、ビート信号SBのアップビート周波数成分FBUとダウンビート周波数成分FBDのそれぞれについてch毎にフーリエ変換を行い、図6に示すようなアップビート周波数成分FBUの周波数スペクトラムおよび図7に示すようなダウンビート周波数成分FBDの周波数スペクトラムを得る。
【0028】
各受信アンテナ3(ch1−4)は同じ物標からの反射波を受信するため、フーリエ変換では同じピーク周波数を有する同じ形状の周波数スペクトラムが各受信アンテナ3(ch1−4)のそれぞれから得られる。但し、各受信アンテナ3(ch1−4)で位相は異なるため、同じピーク周波数であっても位相はアンテナ毎に異なる。例えば、受信アンテナ3(ch1)の周波数スペクトラムのピークPU1(ch1)と受信アンテナ3(ch2)の周波数スペクトラムのピークPU1(ch2)は、周波数については互いに同じであるが、位相については相違している。
【0029】
プロセッサ6は、フーリエ変換によって得たアップビート周波数成分FBUとダウンビート周波数成分FBDのそれぞれの周波数スペクトラムから、所定パワー以上のピークを抽出し、抽出したピークの周波数、パワー、及び位相を抽出する。
【0030】
(ステップS102)周波数スペクトラムのピークには複数の物標の情報が含まれ得るため、1つのピークから物標を分離し、分離した物標の角度を推定する必要がある。そのため、プロセッサ6は、アップビート周波数成分FBUとダウンビート周波数成分FBD
のそれぞれについて、全受信アンテナ3(ch1−4)で周波数が互いに同じピーク(例えば、アップビート周波数成分FBU側であればピークPU1(ch1)とピークPU1(ch2)とピークPU1(ch3)とピークPU1(ch4)が互いに同じ周波数FU1のピークであり、ダウンビート周波数成分FBD側であればピークPD1(ch1)とピークPD1(ch2)とピークPD1(ch3)とピークPD1(ch4)が互いに同じ周波数FD1のピークである)のものを元に、図8に示すような角度スペクトラムを演算により求める。
【0031】
角度スペクトラムの求め方としては、CAPON法やDBF法等の各種方式が考案されているが、本実施形態に係るレーダ装置1のプロセッサ6は、到来波数推定アルゴリズムであるAICやMDLを用いて角度分離可能数として到来波数を予め設定する必要のある所定の角度推定方式(例えば、MUSICやESPRIT、或いは最尤推定法等)に基づいて角度スペクトラムを得る。例えば、ESPRITの場合、反射波の波源は広がりを持たない点波源であり、反射波は全ての受信アンテナに対して平行に入射する平面波であると仮定して、受信信号から相関行列を形成し、固有値と固有ベクトルの性質を基に反射波の到来方向を推定している。よって、相関行列や固有値を取り扱うにあたって到来波数の情報が予め必要となる。
【0032】
プロセッサ6は、周波数スペクトラムのピーク周波数毎に角度スペクトラムを所定の角度推定方式で算出する。例えば、図6および図7に示した周波数スペクトラムを例にとれば、プロセッサ6は、5つのピークの周波数(FU1−3、FD1−2)毎に角度スペクトラムを算出する。図8はアップビート周波数成分FBUにおけるピーク周波数FU1の角度スペクトラムの一例であり、それに対応する同じ物標から得られるダウンビート周波数成分FBDにおけるピーク周波数(例えばFD1とする)の角度スペクトラムを併記している。そして、5つのピーク周波数(FU1−3、FD1−2)の各角度スペクトラムについて、角度スペクトラムのピークの角度とパワーを抽出する。5つのピーク周波数(FU1−3、FD1−2)の各角度スペクトラムの各ピークの角度とパワーの一例を図9に示す。
【0033】
(ステップS103)プロセッサ6は、各角度スペクトラムの各ピークの角度とパワーを抽出したら、各ピークのペアリングを行ない、実在する物標の特定を行なう。すなわち、プロセッサ6は、アップビート周波数成分FBUの角度スペクトラムの各ピークとダウンビート周波数成分FBDの角度スペクトラムの各ピークとの間で、角度やパワーが互いに近似しているもの同士をペアリングする。例えば、図8に例示した角度スペクトラムでは、アップビート周波数成分FBUにおけるピーク周波数FU1のピークU1とピークU2の角度およびパワーが、ダウンビート周波数成分FBDにおけるピーク周波数FD1のピークD2とピークD1の角度およびパワーにそれぞれ近似している。例えば、ピークU1とピークD2は互いに角度が約0°で近似しており、ピークU2とピークD1は互いに角度が約3°で近似している。よって、図9に示すピークU1の角度θU1およびパワーPWU1がピークD2の角度θD2およびパワーPWD2と互いに近似していて、ピークU1とピークD2がペアリングされるので、ピークU1とピークD2が物標TG1を示していることが特定される。
【0034】
プロセッサ6は、アップビート周波数成分FBUの角度スペクトラムの各ピーク(ピークU1−6)とダウンビート周波数成分FBDの角度スペクトラムの各ピーク(ピークD1−5)とを互いにペアリングすることにより、図9に示すように、物標TG1−5の5つの物標を特定する。なお、アップビート周波数成分FBUの角度スペクトラムのピークU6は、ダウンビート周波数成分FBDの角度スペクトラムの何れのピークにもペアリングされていない。よって、ピークU6は、内部ノイズ等に起因して表れたピークであり、実在する物標に因るものでないことが判る。
【0035】
プロセッサ6は、ペアリングされたピーク周波数に基づいて、各物標の角度や距離、相対速度を算出する。ここで、レーダ波の伝搬速度をC、信号生成部9が生成する三角波の変調周波数をFM、三角波の中心周波数をF0、三角波の変調幅をΔFとすると、各物標の距離R(R1〜R5)および相対速度V(V1〜V5)は、次式によって導かれる。
R=((FU+FD)・C)/(8・ΔF・FM)
V=((FD+FD)・C)/(4・F0)
【0036】
また、各物標の角度は、ペアリングされたアップビート周波数成分FBUのピークとダウンビート周波数成分FBDのピークの角度が互いにほとんど同じではあるが、より精度を高めるため、各物標の角度D(D1〜D5)は、次式より導く。
D=(θU+θD)/2
【0037】
(ステップS104)プロセッサ6は、各物標の角度、距離および相対速度のデータをECU2に出力する。例えば、角度スペクトラムの各ピークから図9に示すような5つの物標が特定された場合、プロセッサ6からECU2へ図10に示すようなデータが送られる。各物標の角度、距離および相対速度のデータは、ECU2で車両の制御等に用いられる。
【0038】
ここで、プロセッサ6は、上記方位演算(ステップS102)において角度スペクトラムを得るにあたり、以下のような処理を実行する。以下に示す処理は、適正な角度スペクトラムを得ることを目的にするものであり、角度分離可能数を変えながら算出した複数の角度推定結果を基に、直交成分の大きさ、すなわち、到来波が推定角度から到来した際の各アンテナの入力ベクトルの基底を変換したモードベクトル基底の係数のノルム(複素ベクトルの長さ)の大きさを評価し、適正な角度分離可能数を特定するものである。
【0039】
図11は、以下に示す処理の概念を示した図である。図面では4次元以上の空間を図示できないため、図11では受信アンテナのch数を暫定的に2つとし、便宜的に3次元で図示している。まず、角度分離可能数が到来波数よりも少ない場合を考える(図11の左欄を参照)。
【0040】
到来波1と到来波2が存在する場合、各アンテナの入力ベクトルは2つの到来波を合成したベクトルになる。到来波1と到来波2は何れもノイズより明らかに大きいものとする。ここで、到来波数よりも少ない角度分離可能数で到来方向を推定した場合には、何れか一方の到来波の角度のみが推定され、他方の到来波の角度は推定し切れないことになる。図11の左欄の例では、到来波1の角度のみが算出され、到来波2の角度は算出されなかったことを示している。この場合、モードベクトルは到来波1の角度のみが生成されることになるので、モードベクトルと入力ベクトルとがなす角度が大きくなるため直交成分の大きさが大きくなる。
【0041】
一方、到来波数に一致する角度分離可能数で到来方向を推定した場合には、到来波1と到来波2の両方の角度がそれぞれ推定されることになる。図11の中央欄の例では、到来波1と到来波2の両方の角度が算出されたことを示している。この場合、モードベクトルは到来波1と到来波2の両方の角度が生成されることになるので、到来波1と到来波2の合成モードベクトルの方向は、基本的に入力ベクトルの方向とほぼ一致する。従って、合成モードベクトルと入力ベクトルとがなす角度は小さいため、合成モードベクトルの直交成分の大きさが小さくなる。
【0042】
また、角度分離可能数が、到来波数より多い場合には、モードベクトルの数が到来波数と一致する場合と一つのモードベクトルが分裂する場合とが生じるが、そのような場合で
あっても、図11の右欄に示すように直交成分はいずれの場合も小さくなる。
【0043】
以下に説明する処理フローは、図11を使って説明した上記概念に基づいており、プロセッサ6が角度スペクトラムを得る際に実行するものである。以下、図12に示すフローチャートに沿って説明する。
【0044】
(ステップS201)プロセッサ6は、角度分離可能数を1からnまで逐次変更しながら、上記所定の角度推定方式に基づいてn個の角度推定結果を算出し、メモリ16に格納する。角度推定の回数(スナップショット数)は任意である。角度分離可能数は、空間平均処理において平均をとる受信アンテナ数(1つのサブアレーを構成する受信アンテナ数)を変えてやることにより変更可能である。
【0045】
(ステップS202)プロセッサ6は、算出したn個の角度推定結果の各々について、直交成分をそれぞれ算出する。例えば、角度分離可能数が3の場合には角度推定結果として3つの到来方向の角度が算出されているので、これらをθ1,θ2,θ3とする。この場合、各角度θ1〜θ3の各モードベクトルは、以下のように記号化できる。
【数1】
【0046】
ここで、各モードベクトルを以下のように行列化する。
【数2】
【0047】
なお、モードベクトルa(θ)とは、θ方向から振幅1の到来波が各受信アンテナ3(ch1−4)に到来した際の理想的な受信信号を並べて複素表示したものであり、例えば、図13のように複素数のベクトルで示される。
【0048】
次に、各角度(θ1〜θ3)に対応する3つのモードベクトルに直交するベクトルPを、固有値分解等を行わず比較的高速な演算が可能なプロパゲータ(Propagator)法を用いて以下の計算で求める。
【0049】
方向行列Aの1行目から3行目までを抽出した行列をA1とし、方向行列Aの4行目を抽出した行列をA2とする。
【数3】
【0050】
行列A1は、方向行列Aの1行目から3行目までを抽出したものであるから、3つの受信アンテナ3(ch1−3)によって構成されるサブアレーの受信信号の方向行列を表している。また、行列A2は、方向行列Aの4行目を抽出したものであるから、受信アンテナ3(ch4)の受信信号の方向行列を表している。ここで、3つのモードベクトルに直交するベクトルPは、以下の式によって表される。なお、tは転置を表し、Hは複素共役転置を表す。
【数4】
【0051】
そして、直交成分の大きさを正確に算出するために、以下の式でベクトルPの大きさをモードベクトルと同じ大きさに調整しておく。
【数5】
【0052】
そして、モードベクトルに直交成分を加えた行列を以下のように定める。
【数6】
【0053】
また、各受信アンテナ3(ch1−4)の受信信号をY1〜Y4と定め、受信信号の入
力ベクトルYを以下のように定義する。
【数7】
【0054】
そして、入力ベクトルYの基底を、以下の数式によって標準基底からモードベクトル基底へ変換すると、モードベクトルおよび直交成分の基底のそれぞれの係数を求めることができる。なお、ここでは直交成分の基底の係数を求めればよいため、下記のbn1−3の演算は省略してもよい。
【数8】
【0055】
ここで求めた複素ベクトルbn4の長さ(ノルム)が、直交成分の大きさとなる。
【0056】
(ステップS203)プロセッサ6は、角度分離可能数1からnまでの各角度推定結果の直交成分の大きさを算出したら、これらを比較する。角度分離可能数が到来波数よりも少ない場合、推定した角度をモードベクトルに代入して得たベクトルと実際の受信信号のベクトルとに基づく直交成分の大きさが大きくなる。一方、角度分離可能数が到来波数よりも多い場合、推定した角度をモードベクトルに代入して得たベクトルと実際の受信信号のベクトルとに基づく直交成分の大きさが小さくなる。この結果、角度分離可能数1からnまでの各角度推定結果の直交成分の大きさは、例えば、次のようになる。
【0057】
図14は、各角度推定結果の直交成分の大きさを例示したグラフである。図14に示した例では、角度分離可能数が1から3の場合に直交成分の大きさが閾値よりも大きく、角度分離可能数が4から5の場合に直交成分の大きさが閾値よりも小さくなる。なお、閾値は、レーダ装置1に要求される仕様によって適宜決定するものであり、到来波が理想的なものであれば受信信号に含まれるノイズの大きさから若干の余裕を持たせて設定すればよいが、実機では機体毎に誤差があるため、値を適宜適合させる。
【0058】
(ステップS204)プロセッサ6は、直交成分の比較結果から、適切な角度分離可能数を選択する。適切な角度分離可能数とは、到来波数以上であって演算負荷が最も小さくなる値であり、具体的には、直交成分の大きさが閾値以下となる角度分離可能数のうちの最小値である。例えば、図14に示す例であれば、適切な角度分離可能数は4になる。
【0059】
(ステップS205)プロセッサ6は、選択した角度分離可能数に基づく角度推定結果
をECU2に出力する。
【0060】
本実施形態に係るレーダ装置1は、角度スペクトラムを得るにあたり、直交成分の大きさに基づく最適な角度分離可能数を得ているため、演算処理の負荷を増大させることなく適切に到来方向を推定することが可能である。従って、車載される場合に課される、使用できる演算回路の能力等の制約があり、更に、自車と他車との相対関係の変化が速い故に角度スペクトラムを数十ミリ秒周期で得る必要があるような場合であっても、適切に到来方向を推定することが可能である。なお、上記ステップS201では、角度分離可能数を1からnまで逐次変更していたが、角度分離可能数を繰り上げ、或いは繰り下げるごとに直交成分を比較してもよい。
【0061】
レーダ装置1の効果を検証するため、2つのケースを想定した実験を行なった。以下、実験結果を従来例と比較しながら説明する。
【0062】
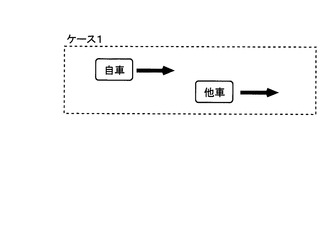
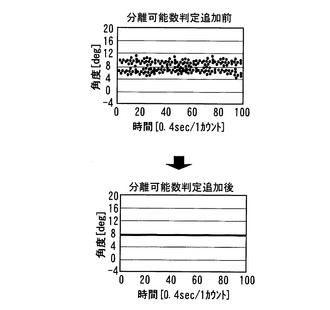
第一の実験は、図15に示すように、自車と先行車とが同様の速度で同じ方向に向かって走行しているケースについて行なったものである。第一の実験の結果を、図16に示す。本ケースでは、自車と他車とが同様の速度で同じ方向に向かって走行しているため、両者の相対的な位置関係は一定であり、理論的にはレーダ装置1から一定の角度のデータが出力される。しかしながら、図16の実験データに示されるように、分離可能数の判定を行なわない従来例では、1つの物標(他車)に対して2以上の角度分離可能数を設定していたため、マルチパス等に起因して他車の方位が定まらないことがあった。一方、上記レーダ装置1であれば、角度分離可能数の判定処理がなされているため、1つの物標(他車)に対して1つの角度分離可能数のデータが選択され、レーダ装置1から一定の角度のデータが出力されていることが判る。
【0063】
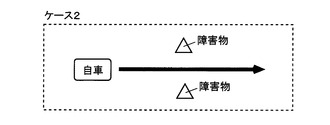
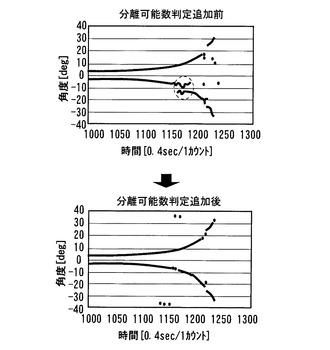
また、第二の実験は、図17に示すように、自車が2つの障害物の間を通り抜けるケースについて行なったものである。第二の実験の結果を、図17に示す。本ケースでは、自車が2つの障害物の間を通り抜けるため、自車の進行に伴って2つの障害物の方位が徐々に広がっていくデータが理論的にはレーダ装置1から出力される。しかしながら、図18の実験データに示されるように、分離可能数の判定を行なわない従来例では、2つの物標(障害物)に対して3以上の角度分離可能数を設定していたため、マルチパス等に起因して3つ以上の物標が障害物として出力されることがあった(例えば、図18のグラフの破線部分を参照)。一方、上記レーダ装置1であれば、角度分離可能数の判定処理がなされているため、2つの物標(障害物)に対して2つの角度分離可能数のデータが選択され、レーダ装置1から2つの障害物のデータが適正に出力されていることが判る。
【符号の説明】
【0064】
1・・レーダ装置,2・・ECU,3・・受信アンテナ,4・・ミキサ,5・・AD変換器,6・・プロセッサ,7・・送信アンテナ,8・・発振器,9・・信号生成部,10・・送信制御部,11・・フーリエ変換部,12・・ピーク抽出部,13・・方位演算部,14・・距離・相対角度演算部,15・・信号処理装置,16・・メモリ
【特許請求の範囲】
【請求項1】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算装置であって、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部を備える、
レーダ装置用の演算装置。
【請求項2】
前記演算部は、設定する前記分離可能数を逐次変更しながら前記所定の推定アルゴリズムによって得た物標の推定角度から、設定した各分離可能数に対応するモードベクトルをそれぞれ生成し、設定した分離可能数毎にそれぞれ算出した前記直交成分の大きさを互いに比較することにより、設定した各分離可能数の適否を判定する、
請求項1に記載のレーダ装置用の演算装置。
【請求項3】
前記演算部は、前記直交成分の大きさが、前記レーダ装置に要求される仕様によって決定される所定の大きさの範囲内であれば、設定した前記分離可能数が適当と判定する、
請求項1または2に記載のレーダ装置用の演算装置。
【請求項4】
前記演算部は、前記直交成分の大きさに基づく判定処理によって適当と判定した前記分離可能数に基づく前記推定アルゴリズムの推定角度を出力する、
請求項1から3の何れか一項に記載のレーダ装置用の演算装置。
【請求項5】
物標の方向を特定するレーダ装置であって、
複数のアンテナと、
予め設定した分離可能数に応じた数の物標の角度を前記複数のアンテナの各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部と、を備える、
レーダ装置。
【請求項6】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算方法であって、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、
前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する、
レーダ装置用の演算方法。
【請求項7】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算プログラムであって、
前記レーダ装置に、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成させ、
前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大き
さに基づいて、設定した前記分離可能数の適否を判定させる、
レーダ装置用の演算プログラム。
【請求項1】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算装置であって、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、任意の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部を備える、
レーダ装置用の演算装置。
【請求項2】
前記演算部は、設定する前記分離可能数を逐次変更しながら前記所定の推定アルゴリズムによって得た物標の推定角度から、設定した各分離可能数に対応するモードベクトルをそれぞれ生成し、設定した分離可能数毎にそれぞれ算出した前記直交成分の大きさを互いに比較することにより、設定した各分離可能数の適否を判定する、
請求項1に記載のレーダ装置用の演算装置。
【請求項3】
前記演算部は、前記直交成分の大きさが、前記レーダ装置に要求される仕様によって決定される所定の大きさの範囲内であれば、設定した前記分離可能数が適当と判定する、
請求項1または2に記載のレーダ装置用の演算装置。
【請求項4】
前記演算部は、前記直交成分の大きさに基づく判定処理によって適当と判定した前記分離可能数に基づく前記推定アルゴリズムの推定角度を出力する、
請求項1から3の何れか一項に記載のレーダ装置用の演算装置。
【請求項5】
物標の方向を特定するレーダ装置であって、
複数のアンテナと、
予め設定した分離可能数に応じた数の物標の角度を前記複数のアンテナの各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する演算部と、を備える、
レーダ装置。
【請求項6】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算方法であって、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成し、
前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大きさに基づいて、設定した前記分離可能数の適否を判定する、
レーダ装置用の演算方法。
【請求項7】
物標の方向を複数のアンテナの各受信信号に基づいて特定するレーダ装置用の演算プログラムであって、
前記レーダ装置に、
予め設定した分離可能数に応じた数の物標の角度を前記各受信信号から推定する所定の推定アルゴリズムを使い、所定の分離可能数を設定して前記所定の推定アルゴリズムによって得た物標の推定角度からモードベクトルを生成させ、
前記モードベクトルと前記各受信信号の入力ベクトルとから算出した直交成分の大き
さに基づいて、設定した前記分離可能数の適否を判定させる、
レーダ装置用の演算プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−220196(P2012−220196A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−82628(P2011−82628)
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月4日(2011.4.4)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]