
レーダ装置
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、距離(レンジ)方向と方位(アジマス)方向に高い分解能を有するレーダ装置に関するものである。
【背景技術】
【0002】
レーダ装置は、航空機や自動車などの移動体に搭載され、移動体の進行方向正面のレーダ画像を生成するものである。
レーダ装置から発信されるレーダの波長が光と比べて長いため、霧などの悪視界環境下においても、画像を生成することができる利点がある。
したがって、例えば、航空機にレーダ装置を搭載すれば、進行方向の視界が悪い環境での着陸支援が可能になり、多くの場面で有益である。
【0003】
従来の画像レーダ技術としては、合成開口レーダ(SAR:Synthetic Aperture Radar)や、ドップラービームシャープニング(DBS:Doppler Beam Sharpening)などが知られている(例えば、非特許文献1参照)。
しかし、これらの技術は、いずれも進行方向に対して横方向、あるいは、斜め前方を画像化することができても、正面を画像化することができない。その理由は、これらの技術は、本質的にプラットフォームの移動を利用して、仮想的にプラットフォームの進行方向に広がる大きなアレイアンテナを構成することによって、進行方向に平行な方向の分解能を稼ぐ手法だからである。また、受信信号のドップラー周波数は、プラットフォームの進行方向に対して対称な方向について等しいため、これらの技術を用いて正面方向付近を画像化すると、得られる画像は、プラットフォームの進行方向について左右折り返した画像になる。
【0004】
結局、移動体の進行方向の正面を向いているレーダの方位(アジマス)方向の分解能を高めるには、開口の大きなアレーアンテナ等が必要である。
しかしながら、グレーティングローブの発生を防ぐためには、素子アンテナを半波長間隔で配置する必要があるので、アレーアンテナの開口径が大きくなると、そのアレーアンテナを構成する素子アンテナの数が増大することになる。
そのため、従来のレーダ装置は、送信用アレーアンテナと受信用アレーアンテナを個別に備えることにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する方式を採用している(例えば、特許文献1参照)。以下、この方式を第1の方式と称する。
【0005】
この第1の方式では、送信用アレーアンテナと受信用アレーアンテナの素子間隔を半波長よりも広げることで素子数を削減する。
そして、送信用アレーアンテナの素子間隔と、受信用アレーアンテナの素子間隔とが異なるように、送信用アレーアンテナと受信用アレーアンテナを配置することにより、送信のアンテナパターン(以下、「送信パターン」という)に生じるグレーティングローブと、受信のアンテナパターン(以下、「受信パターン」という)に生じるグレーティングローブの間隔が一致しないようにして、送受信全体としてのパターン(以下、「送受信パターン」という)に生じるグレーティングローブを抑圧する。
さらに、送信パターンと受信パターンを同期させて走査することにより、領域を走査して観測するようにする。
【0006】
その他にも、素子アンテナを不等間隔に配置することにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する第2の方式が知られている(例えば、非特許文献2参照)。
【0007】
【特許文献1】米国特許 3,825,928 “High Resolution Bistatic Rader System”
【非特許文献1】D.R.Wehner,“High−Resolution Radar Second Edition,”Artech House Inc,1995
【非特許文献2】A.Manikas and C.Proukakis, “Modeling and Estimation of Ambiguities in Linear Arrays,” IEEE Transactions on Signal Processing,Vol.46,No.8,August 1998
【発明の開示】
【発明が解決しようとする課題】
【0008】
従来のレーダ装置は以上のように構成されているので、第1の方式では、送受信パターンに生じるグレーティングローブを十分に低く抑えるには、素子アンテナの配置に制約が生じる。送信アレーアンテナの素子間隔と受信アレーアンテナの素子間隔が、所定の制約を満たさない場合、例えば、受信パターンに生じるグレーティングローブが、送信パターンのサイドローブの方向と一致して、送受信パターンに比較的高いグレーティングローブが生じてしまうことがある課題があった。
また、第1の方式では、観測範囲が重複しないように、かつ、隙間なく広い領域を観測しようとすると、送受信パターンの角度分解能に相当する角度刻みで走査する必要がある。そのため、走査時間が長くなる問題もあった。
一方、第2の方式では、グレーティングローブを抑圧することができても、サイドローブレベルが全体に上昇してしまう課題があった。
【0009】
この発明は上記のような課題を解決するためになされたもので、走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係るレーダ装置は、不等間隔に配置されている複数の素子アンテナから構成され、かつ、送信手段の送信アンテナより開口長が長い受信アンテナを用いて、目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段とを設け、その受信手段により繰り返し受信されたパルス信号と荷重計算手段により計算された荷重とを用いて、受信ビームを形成するようにしたものである。
【発明の効果】
【0011】
この発明によれば、不等間隔に配置されている複数の素子アンテナから構成され、かつ、送信手段の送信アンテナより開口長が長い受信アンテナを用いて、目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段とを設け、その受信手段により繰り返し受信されたパルス信号と荷重計算手段により計算された荷重とを用いて、受信ビームを形成するように構成したので、パルスを繰り返し送受信して得られた受信信号に対するパルスドップラー処理において生じる左右対称の折り返し方向に、受信ビームのナルのパターンを組み合わせることによって、受信アンテナの素子数を削減すると同時に、この折り返しを抑圧でき、また走査時間の長時間化を招くことなく、観測領域を広げることができる。
【発明を実施するための最良の形態】
【0012】
実施の形態1.
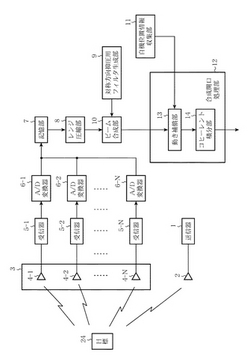
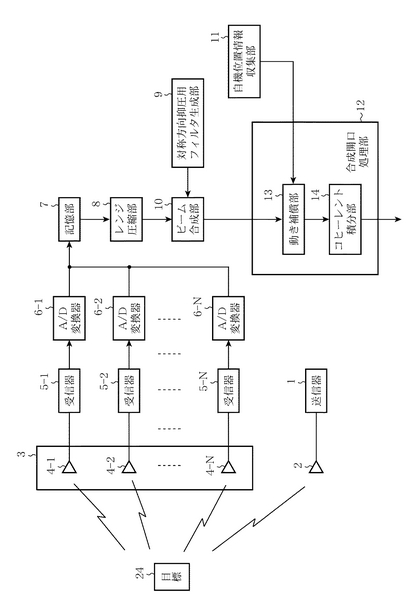
図1はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、送信器1は基準となるパルス信号を生成し、そのパルス信号を繰り返し送信アンテナ2に出力する。送信アンテナ2は送信器1から出力されたパルス信号を目標24に向けて繰り返し送信する。なお、送信器1と送信アンテナ2から送信手段が構成されている。
【0013】
受信アンテナ3は不等間隔に配置されている複数の素子アンテナ4−1,4−2,・・・,4−Nから構成され、受信アンテナ3の開口長(アレー長)が送信アンテナ2の開口長よりも長くなるように構成されている。
受信器5−1,5−2,・・・,5−Nは受信アンテナ3の素子アンテナ4−1,4−2,・・・,4−Nを用いて、目標24に反射されたパルス信号を受信して増幅する。
A/D変換器6−1,6−2,・・・,6−Nは受信器5−1,5−2,・・・,5−Nにより増幅されたアナログのパルス信号をディジタルのパルス信号に変換する。
記憶部7はA/D変換器6−1,6−2,・・・,6−NによりA/D変換されたパルス信号を一時的に格納するメモリである。
レンジ圧縮部8は記憶部7に記憶されているパルス信号に対するパルス圧縮処理を実施して、レンジ分解能を高めた信号(以下、「レンジプロフィール」という)を取得する。
なお、受信アンテナ3、受信器5−1,5−2,・・・,5−N、A/D変換器6−1,6−2,・・・,6−N、記憶部7及びレンジ圧縮部8から受信手段が構成されている。
【0014】
対称方向抑圧用フィルタ生成部9は送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算する荷重計算手段を構成している。
ビーム合成部10はレンジ圧縮部8により取得されたレンジプロフィールと対称方向抑圧用フィルタ生成部9により計算された荷重を合成して、受信ビームを形成する受信ビーム形成手段を構成している。
【0015】
自機位置情報収集部11は例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体の現在位置を示す位置情報を収集する。
合成開口処理部12は自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段を構成している。
合成開口処理部12の動き補償部13は自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームの位相を補償する。
合成開口処理部12のコヒーレント積分部14は動き補償部13による位相補償後の受信ビームをコヒーレント積分する。
【0016】
次に動作について説明する。
まず、送信器1は、基準となるパルス信号を生成し、そのパルス信号を周期Tpriの間隔で繰り返し送信アンテナ2に出力することにより、P個のパルス信号を目標24に向けて送信する。
ここで、送信アンテナ2の開口長(アレー長)をLt、パルス信号の波長をλとすると、送信アンテナ2の主ビームのnull to nullの幅Δθt[rad]は、下記の式(1)で与えられる。
Δθt=2λ/Lt (1)
ただし、送信アンテナ2は、電子的あるいは機械的に送信パターンの主ビームの中心方向θcを走査できるものとする。
【0017】
送信アンテナ2から送信されたP個のパルス信号は目標24に照射されて反射され、受信アンテナ3に到来する。
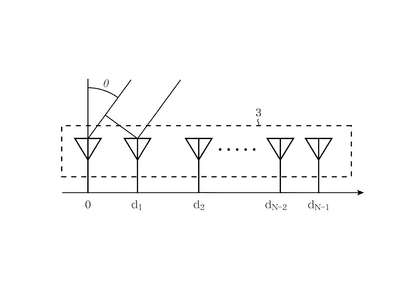
ここで、受信アンテナ3は、図2に示すように、N個の素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいるものとする。素子アンテナ4−1,4−2,・・・,4−Nの配置はパラメータdnで表現している。
したがって、図2の例では、素子アンテナ4−1,4−2,・・・,4−Nの間隔は、d1,d2−d1,・・・,dN−1−dN−2の不等間隔になる。
受信アンテナ3の開口長をLrとすると、素子アンテナ4−1,4−2,・・・,4−Nの配置を示すパラメータとの関係で、下記の式(2)が成立する。
Lr=dN−1 (2)
受信アンテナ3の主ビーム幅Δθr[rad]は、下記の式(3)で与えられる。
Δθr=2λ/Lr (3)
【0018】
図2では、N個の素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいるものについて示したが、N個の素子アンテナ4−1,4−2,・・・,4−Nが不等間隔に配列されていればよく、例えば、2次元状に配列されていてもよい。
【0019】
受信器5−1,5−2,・・・,5−Nは、受信アンテナ3の素子アンテナ4−1,4−2,・・・,4−Nを用いて、目標24に反射されたパルス信号を受信して増幅する。
A/D変換器6−1,6−2,・・・,6−Nは、受信器5−1,5−2,・・・,5−Nにより増幅されたアナログのパルス信号を受けると、そのアナログのパルス信号をディジタルのパルス信号に変換する。
記憶部7は、A/D変換器6−1,6−2,・・・,6−NによりA/D変換されたパルス信号を一時的に格納する。
レンジ圧縮部8は、記憶部7に記憶されているP個のパルス信号に対するパルス圧縮処理を実施することにより、レンジ分解能を高めた信号、即ち、レンジプロフィールを取得する。
ここで、レンジビン数をM、nをN以下の自然数、mをM以下の自然数として、レンジ圧縮部8から出力されるレンジプロフィールをXn,m(p)(p=1,2,・・・,P)とする。
【0020】
対称方向抑圧用フィルタ生成部9は、送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算する。
具体的には、次のようにして荷重を計算する。
【0021】
まず、ビームを向けたい所望の方向(送信パターンの主ビーム内の方向)θfに対応するステアリングベクトルをa(θf)とし、ナルを形成したいアジマス方向(例えば、移動体の進行方向に対して左右対称な方向)θsgに対応するステアリングベクトルをa(θsg)(g=1,2,・・・,G)とする。
ここでは一般化のため、G個の異なる方向にナルを形成することを考える。これらのステアリングベクトルは次式で表される。以下、ビームを向けたい所望の方向のことをステアリング角と呼ぶことにする。
a(θf)=[1 exp((2πj・d1・sinθf))/λ)
・・・exp((2πj・dM−1・sinθf)/λ)]T (4)
a(θsg)=[1 exp((2πj・d1・sinθsg)/λ)
・・・exp((2πj・dM−1・sinθsg)/λ)]T (5)
g=1,2,・・・,G
ただし、式(4)(5)における上付きのTは行列の転置を表している。
【0022】
次に、N個の素子アンテナ4−1,4−2,・・・,4−Nに対する荷重wn(n=1,2,・・・,N)をまとめた荷重ベクトルwを次式のように定義する。
w=[w1 w2 ・・・ wN]T (6)
対称方向抑圧用フィルタ生成部9は、ステアリング角方向のゲインを1として、抑圧したいアジマス方向にナルを生成するために、次式で定義される二乗誤差σを最小化するように荷重wを決定する。
σ=‖y−A・w‖2 (7)
【0023】
ただし、Aはステアリング角度とナルを形成するアジマス方向に対応するステアリングベクトルをまとめた(G+1)×Nの行列であり、下記の式(8)で表される。
yは所望のゲインパターンを表す(G+1)次元のベクトルである。
ステアリング角θfの方向にピークを持ち、θsgの方向にナルを持つパターンを生成するためには、ベクトルyは下記の式(9)のように設定される。
A=[a(θf) a(θs1) ・・・ a(θsG)]*T (8)
y=[1 ε ・・・ ε]T (ε≪1) (9)
ただし、上付きの*は複素共役を表している。
【0024】
これにより、荷重wは、下記の式(10)に示すように、最小二乗法によって求めることができる。
w=A+y (10)
ただし、式(10)における上付きの+は疑似逆行列を表している。
【0025】
対称方向抑圧用フィルタ生成部9は、マルチビームを形成するために、全てのステアリング角θf,k(k=1,2,・・・,K)と、そのときに抑圧したい方向θsg,kの組み合わせについて、上記の計算を反復することにより、必要な数だけ荷重wkを計算する。
ここで、Kは形成するビームの数である。
wk=Ak+y (k=1,2,・・・,K) (11)
Ak=[a(θf,k) a(θs1,k) ・・・ a(θsG,k)]*T
(12)
【0026】
対称方向抑圧用フィルタ生成部9は、方向θsg,kの組みが、−θf,kを含むように設定し、式(11)にしたがって、所望のK通りのビームパターンを形成するための荷重を計算する。
対称方向抑圧用フィルタ生成部9により計算された荷重wを用いて形成される受信ビームパターンは、所望方向θf,kにピークをもち、これと進行方向について対称な方向−θf,kにナルを向けるパターンとなる。
【0027】
ビーム合成部10は、上記のようにして、対称方向抑圧用フィルタ生成部9が荷重wkを計算すると、下記の式(13)に示すように、レンジ圧縮部8により取得されたレンジプロフィールXn,m(p)と荷重wkを合成して、受信ビームを形成する。
Ym=W*TXm(p) (13)
W=[w1 w2 ・・・ wK] (14)
Xm(p)=[X1,m(p) X2,m(p) ・・・ XN,m(p)]T
(15)
Ym(p)=[Y1,m(p) Y2,m(p) ・・・ YK,m(p)]T
(16)
式(16)におけるYk,m(p)は、p個目のパルス信号を送受信したときの、k番目のビームにおけるレンジプロフィールのm番目のレンジセルの信号である。
ビーム合成部10は、このレンジプロフィールYk,m(p)を合成開口処理部12に出力する。
なお、各レンジセルについて、K個のビームの信号をまとめたベクトルをYm(p)と定義している。
【0028】
自機位置情報収集部11は、例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体の現在位置を示す位置情報を収集する。
合成開口処理部12は、自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10から出力されたレンジプロフィールYk,m(p)に対する合成開口処理を実施する。
具体的には、次のようにして合成開口処理を実施する。
【0029】
合成開口処理部12の動き補償部13は、自機位置情報収集部11により収集された位置情報を用いて、目標24に反射されたパルス信号の時刻tにおける位相を求める。
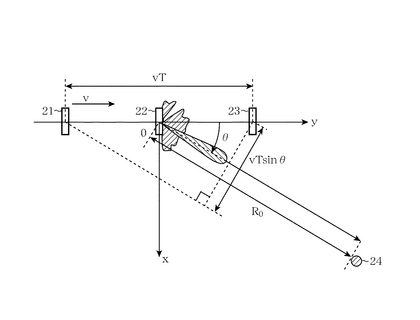
図3はパルス信号の位相を算出する方法を説明する説明図である。
図において、符号21〜23が指し示すのは、移動体に搭載された送信アンテナ2及び受信アンテナ3が各時刻において存在している地点である。図3の例では、送信アンテナ2及び受信アンテナ3は速度vで直線運動しているものとする。
また、地点21から地点23に移動する間に時間Tが経過するものとする。この場合、地点21と地点23の距離はv×Tとなる。
また、地点22は地点21と地点23の中間点であるものとし、ここでは、地点22をx−y座標系の原点Oにとり、送信アンテナ2及び受信アンテナ3の移動する方向をy軸の正方向とする。
さらに、y軸の正方向とアジマス方向に角度θをなす位置に目標24が存在しており、原点Oと目標24の距離をR0とする。以後の説明では、角度θをスクイント角と呼ぶことにする。
【0030】
図3から明らかなように、移動体から目標24までの時刻tにおける距離R(θ,t)は、余弦定理より、下記の式(17)で算出される。
R(θ,t)=(R02+(v・t)2−2R0・v・t・cosθ)1/2 (17)
式(17)において、移動体の移動距離vtが距離R0と比べて短い場合、式(17)の右辺を式(18)のように近似することができる。
R(θ,t)≒R0−v・t・cosθ (18)
【0031】
式(18)を用いれば、波長λで送受信されたパルス信号は、R(θ,t)の距離を往復するので、位相φ(θ,t)は下記の式(19)で与えられる。
したがって、動き補償部13は、下記の式(19)を計算することにより、目標に反射されたパルス信号の時刻tにおける位相φ(θ,t)を求める。
φ(θ,t)=4π・R(θ,t)/λ
≒4π(R0−v・t・cosθ)/λ (19)
【0032】
次に、動き補償部13は、受信したP個のパルス信号、即ち、ビーム合成部10から出力されたレンジプロフィールYk,m(p)を必要なだけシフトして、目標24を含むレンジビンが同じレンジビン番号mとなるように調整する。
ここでのシフト量は、ビームのステアリング角θf,kに依存する。繰り返し周期Tpriで、p個のパルス信号を送信する間に移動体が移動する距離はv×p×Tpriであるから、ステアリング角θf,k方向におけるレンジプロフィールのシフト量sk(p)を下記の式(20)によって計算することができる。
sk(p)=v・p・Tpri・cosθf,k (20)
【0033】
ビーム毎に式(20)によって計算されるシフト量sk(p)だけレンジプロフィールYk,m(p)をシフトして、レンジビンを揃えたレンジプロフィールをY’k,m(p)とする。
動き補償部13は、式(19)によって計算される位相φ(θ,t)を下記の式(21)にしたがって補償する。
Zq,m(p)=Y’k,m(p)exp{−jφ(θq,pTpri)} (21)
p=1,2,・・・,P
q=1,2,・・・,Q
k=1,2,・・・,K
m=1,2,・・・,M
ここで、Qはコヒーレント積分後のアジマス方向のサンプル数である。ただし、θq方向に十分な受信ゲインが取れるようにするため、θqとθf,kは、下記の式(22)を満たすことが望ましい。
|θq−θf,k|≦Δθr/2 (22)
【0034】
合成開口処理部12のコヒーレント積分部14は、上記のようにして、動き補償部13が位相φ(θ,t)を補償すると、下記の式(23)に示すように、動き補償部13から出力される位相補償後の信号Zq,m(p)をコヒーレント積分する。
<Zq,m>=ΣZq,m(p) (23)
q=1,2,・・・,Q
m=1,2,・・・,M
ただし、式(23)におけるΣは和記号であり、p=1からPまでのZq,m(p)の和を計算する。
【0035】
ただし、送信パターンがアジマス方向に走査している場合、あるアジマス方向θkについて積分できるパルス数は、送信パターンのメインビームの照射範囲が、そのアジマス方向θkを含んでいる間に送受信されたパルスの数で決まる。
また、送信パターンが角速度ωで走査している場合、そのアジマス方向θkについて積分できるパルス数P0は、下記の式(24)から算出することができる。
P0=[θmax/(ω・Tpri)] (24)
P0≦P
【0036】
ここで、θmaxは送信パターンにおいて、ピークのゲインに対して十分に高いゲインを持っているとみなせる角度幅である。したがって、θmaxとしては、例えば、ビームの半値幅などを用いることができる。
なお、式(24)の[]は、その中身の式、即ち、θmax/ω・Tpriの値を超えない最大の整数である。
コヒーレント積分部14は、同一の方向について、式(13)に基づいて得られた回数分のレンジプロフィールを式(23)に基づいて積分して<Yk,m>を求める。
【0037】
ところで、式(21)と式(23)は、スクイント方向のSAR(Synthetic Aperture Rader、合成開口レーダ)の処理を表すものである。
式(23)によるコヒーレント積分後のアジマス分解能Δθdは、下記の式(25)で算出されることが知られている。
Δθd=λ/(2v・T・sinθ) (25)
【0038】
ただし、式(25)において、分解能を4dB幅で定義している。
一般に知られているように、SARの処理によって進行方向正面付近の方位方向の分解能は向上しない。このことは、式(25)において、θ=0とすると、右辺が発散することからも確かめられる。
つまり、観測領域全体にわたって式(25)の分解能が達成されるわけではない。結局、全体としての方位方向の分解能は、受信アンテナ3の開口長Lrによって決まる分解能Δθrと、式(25)の分解能Δθdのうち、高い方の分解能によって求められる。
即ち、min{A,B}が、AとBのうち、小さい方を選択する式とすれば、分解能Δθは、下記の式(26)で与えられる。
Δθ=min{Δθr/2,Δθd}
=min{λ/Lr,λ/(2v・T・sinθ)} (26)
【0039】
一方、スクイント角θが大きい領域では、式(23)のコヒーレント積分の結果得られる方位方向の角度分解能は、受信パターンの主ビームの太さで決まる角度分解能よりも高くなる場合がある。
このことから、式(22)を満たすようにθqを決定する場合には、θqをθkよりも細かく刻んで決定することが望ましいことが分かる。
【0040】
また、式(19)に示すように、移動体から目標24までの距離R(θ,t)によって決まるパルス信号の位相φ(θ,t)は、スクイント角θに関して遇関数である。
したがって、式(23)のコヒーレント積分の結果は、スクイント角がθq方向の信号について値が増大するのと同時に、移動体の進行方向について対称な−θq方向の信号も増大する。
そのため、従来のスクイントモードSARの処理だけでは、進行方向を軸に左右折り返した画像が得られる。
ところが、この実施の形態1では、対称方向抑圧用フィルタ生成部9により計算された荷重を用いて受信ビームを形成するため、ビーム形成後の各ビームのレンジプロフィールYk,m(p)においては、左右対称な方向からの信号がすでに抑圧されている。
【0041】
以上で明らかなように、この実施の形態1によれば、不等間隔に配置されている素子アンテナ4−1,4−2,・・・,4−Nから構成され、かつ、送信アンテナ2より開口長が長い受信アンテナ3を用いて、目標24に反射されたパルス信号を繰り返し受信する受信器5−1,5−2,・・・,5−Nのほか、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9などを設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて、受信ビームを形成するように構成したので、走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができる効果を奏する。
【0042】
即ち、素子アンテナ4−1,4−2,・・・,4−Nを不等間隔に配置し、移動によって生じるレンジのシフトと位相の変化を補償してコヒーレント積分するので、進行方向の正面については、受信アンテナ3の開口長で決まる角度分解能を得ることができ、進行方向の斜め前方については、スクイントモードSAR相当の分解能を得ることができる。同時に、不等間隔に配置している素子アンテナ4−1,4−2,・・・,4−Nを用いて、ステアリング角度と進行方向について左右対称な方向にナルをもつビームパターンを形成するので、従来のスクイントモードSARで発生していた左右対称方向の信号の折り返しを抑圧することができる。
【0043】
なお、この実施の形態1では、素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいる受信アンテナ3を用いるものについて示したが、素子アンテナ4−1,4−2,・・・,4−Nが不等間隔に配置されていればよく、例えば、素子アンテナ4−1,4−2,・・・,4−Nが2次元に配置されている受信アンテナ3を用いてもよい。
また、送信アンテナ2のアンテナ方式は、特に制限がなく、フェーズドアレーアンテナや開口面アンテナなど、いずれのアンテナ方式であっても構わない。
また、この実施の形態1では、受信アンテナ3の開口面が移動体の進行方向を向いているものについて示したが、他の方向を向いている場合についても容易に拡張できることは言うまでもない。
【0044】
実施の形態2.
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
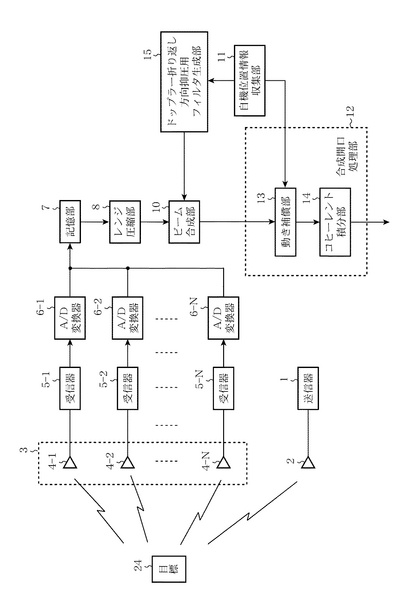
ドップラー折り返し方向抑圧用フィルタ生成部15は図1の対称方向抑圧用フィルタ生成部9と同様にして、送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算するほか、ドップラーの折り返し方向にナルを形成するための荷重を計算する。なお、ドップラー折り返し方向抑圧用フィルタ生成部15は荷重計算手段を構成している。
【0045】
次に動作について説明する。
ドップラー折り返し方向抑圧用フィルタ生成部15以外の構成部分は、上記実施の形態1と同様であるため、ドップラー折り返し方向抑圧用フィルタ生成部15の動作についてのみ説明する。
【0046】
ここでは、ステアリング角度をθf,k、ドップラーの折り返しが生じる方向をθdh,kと表すものとする。
パルス繰り返し周期Tpriで送受信を行っている場合、ドップラー周波数の折り返しは1/Tpriの幅で繰り返し発生する。アジマス方向の角度とドップラー周波数の関係から、ステアリング角度がθf,kのときの、ドップラーの折り返しが生じる方向θdh,kは、下記の式(27)の関係を満足する。ただし、hは自然数である。
(2v・cosθf,k/λ)−(2v・cosθdh,k/λ)=h/Tpri
(27)
【0047】
式(27)を変形すると、ドップラーの折り返しが生じる方向θdh,kは下記の式(28)のように表される。
θdh,k=cos−1(cosθf,k−h・λ/(2v・Tpri)) (28)
【0048】
まず、ドップラー折り返し方向抑圧用フィルタ生成部15は、波長λと、パルス繰返し周期Tpriと、自機位置情報収集部11から出力される移動体の速度vの値を式(28)に代入して、ドップラー折り返し方向θdh,kを計算する。
次に、ドップラー折り返し方向抑圧用フィルタ生成部15は、ドップラー折り返し方向θdh,kにナルを形成する荷重wkを計算する。
荷重wkの計算方法は、上記実施の形態1における対称方向抑圧用フィルタ生成部9と同様である。
【0049】
即ち、ドップラー折り返し方向抑圧用フィルタ生成部15は、ステアリング方向θf,kに対応するステアリングベクトルをa(θf,k)として、ナルを形成する対称方向の近傍θsg,kに対応するステアリングベクトルをa(θsg,k)(g=1,2,・・・,G)、ナルを形成するドップラー折り返し方向θdh,kに対応するステアリングベクトルをa(θdh,k)(h=1,2,・・・,H)とする。
a(θf)=[1 exp((2πj・d1・sinθf)/λ)
・・・exp((2πj・dM−1・sinθf)/λ)]T (29)
a(θsg)=[1 exp((2πj・d1・sinθsg)/λ)
・・・exp((2πj・dM−1・sinθsg)/λ)]T(30)
g=1,2,・・・,G
a(θdh,k)=[1 exp((2πj・d1・sinθdh,k)/λ)
・・・exp((2πj・dM−1・sinθdh,k)/λ)]T
(31)
h=1,2,・・・,H
【0050】
ここで、Hはナルを形成して抑圧するドップラー折り返し方向の数であり、観測領域の幅、パルス繰返し周期Tpri、移動体の速度vなどによって決定される。
ドップラー折り返し方向抑圧用フィルタ生成部15は、ステアリング角方向のゲインを1として、抑圧したいアジマス方向にナルを生成する荷重wkを下記の式(32)によって計算する。
wk=Ak+y (32)
k=1,2,・・・,K
Ak=[a(θf,k) a(θs1,k) ・・・ a(θsG,k)
a(θd1,k) ・・・ a(θdH,k)]*T (33)
y=[1 ε ・・・ ε]T (ε≪1) (34)
【0051】
ただし、Aはステアリング角度と、ナルを形成するアジマス方向に対応するステアリングベクトルをまとめた(G+H+1)×Nの行列であり、yは所望のゲインパターンを表す(G+H+1)次元のベクトルである。
また、ステアリング角θf,kの方向にピークを持ち、θsg,k、θdh,kの方向にナルを持つパターンを生成するため、ベクトルyは式(34)のように設定される。
ドップラー折り返し方向抑圧用フィルタ生成部15により計算された荷重wkは、ビーム合成部10に出力される。その他の動作は、上記実施の形態1と同様である。
【0052】
以上で明らかなように、この実施の形態2によれば、ドップラーの折り返し方向θdh,kにナルを形成するための荷重wkを計算するように構成したので、上記実施の形態1のレーダ装置で得られる効果のほか、ドップラーの折り返し方向に生じるピークを抑圧することができる効果を奏する。
【0053】
実施の形態3.
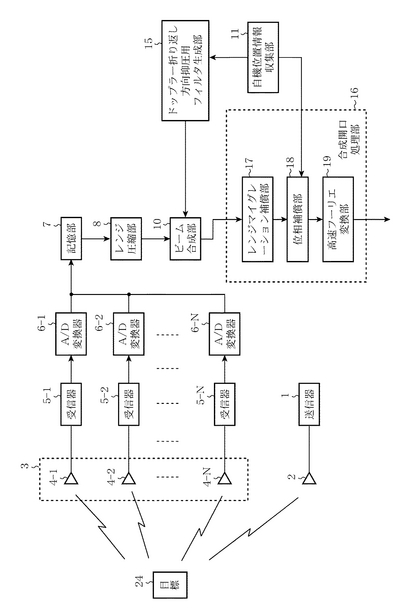
図5はこの発明の実施の形態3によるレーダ装置を示す構成図であり、図において、図4と同一符号は同一または相当部分を示すので説明を省略する。
図5の合成開口処理部16は図1及び図4の合成開口処理部12と同様に、自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段を構成している。
合成開口処理部16のレンジマイグレーション補償部17はビーム合成部10から出力されたレンジプロフィールに対するレンジマイグレーション補償(移動体の移動によるレンジプロフィールのシフト分の補償)を実施する。
合成開口処理部16の位相補償部18は注目するシーン中心の位相を補償する。
合成開口処理部16の高速フーリエ変換部19は位相補償部18による位相補償後の信号をヒット方向に高速フーリエ変換する。
【0054】
次に動作について説明する。
合成開口処理部16以外の構成部分は、上記実施の形態1,2と同様であるため、合成開口処理部16の動作についてのみ説明する。
【0055】
合成開口処理部16のレンジマイグレーション補償部17の処理内容は、上記実施の形態1における動き補償部13におけるレンジプロフィールのシフト処理と同様であり、受信したP個のパルス信号のレンジプロフィールYk,m(p)を必要なだけシフトして、目標24を含むレンジビンが同じレンジビン番号mとなるように調整する。
ここでのシフト量は、ビームのステアリング角θf,kに依存する。
繰り返し周期Tpriで、p個のパルス信号を送信する間に移動体が移動する距離は、v×p×Tpriであるから、ステアリング角θf,k方向におけるレンジプロフィールのシフト量sk(p)を上記の式(20)によって計算することができる。
【0056】
レンジマイグレーション補償部17は、ビーム毎に式(20)にしたがって計算されるシフト量sk(p)だけレンジプロフィールYk,m(p)をシフトして、レンジビンを揃えたレンジプロフィールY’k,m(p)を位相補償部18に出力する。
【0057】
合成開口処理部16の位相補償部18は、受信ビームの位相の二次以上の変化を補償する。即ち、ビームの中心方向の位相分を下記の式(35)にしたがって補償する。
Zf,k,m(p)=Y’k,m(p)exp{−jφ(θf,k,pTpri)}
(35)
p=1,2,・・・,P
k=1,2,・・・,K
m=1,2,・・・,M
【0058】
上記のようにして、位相補償部18が式(35)にしたがってビームの中心θf,k方向の位相を補償すると、θf,kに隣接する角度からの信号成分の位相変化が概ねリニアになるため、パルスヒット方向にフーリエ変換することにより、アジマス方向の分解能を高めることができる。
合成開口処理部16の高速フーリエ変換部19は、レンジビンを揃えて、式(35)の位相補償処理を行って得られるレンジプロフィールZf,k,m(p)に対して、レンジビン毎に高速フーリエ変換を実施する。
【0059】
以上で明らかなように、この実施の形態3によれば、高速フーリエ変換を実施して合成開口処理を行うように構成したので、演算量を削減することができるようになり、処理時間を短縮することができる効果を奏する。
【図面の簡単な説明】
【0060】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】受信アンテナの開口長と、受信アンテナを構成する素子アンテナの配置を示す説明図である。
【図3】パルス信号の位相を算出する方法を説明する説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【図5】この発明の実施の形態3によるレーダ装置を示す構成図である。
【符号の説明】
【0061】
1 送信器(送信手段)、2 送信アンテナ(送信手段)、3 受信アンテナ(受信手段)、4−1,4−2,・・・,4−N 素子アンテナ、5−1,5−2,・・・,5−N 受信器(受信手段)、6−1,6−2,・・・,6−N A/D変換器(受信手段)、7 記憶部(受信手段)、8 レンジ圧縮部(受信手段)、9 対称方向抑圧用フィルタ生成部(荷重計算手段)、10 ビーム合成部(受信ビーム形成手段)、11 自機位置情報収集部、12 合成開口処理部(合成開口処理手段)、13 動き補償部、14 コヒーレント積分部、15 ドップラー折り返し方向抑圧用フィルタ生成部(荷重計算手段)、16 合成開口処理部(合成開口処理手段)、17 レンジマイグレーション補償部、18 位相補償部、19 高速フーリエ変換部、21 地点、22 地点、23 地点、24 目標。
【技術分野】
【0001】
この発明は、距離(レンジ)方向と方位(アジマス)方向に高い分解能を有するレーダ装置に関するものである。
【背景技術】
【0002】
レーダ装置は、航空機や自動車などの移動体に搭載され、移動体の進行方向正面のレーダ画像を生成するものである。
レーダ装置から発信されるレーダの波長が光と比べて長いため、霧などの悪視界環境下においても、画像を生成することができる利点がある。
したがって、例えば、航空機にレーダ装置を搭載すれば、進行方向の視界が悪い環境での着陸支援が可能になり、多くの場面で有益である。
【0003】
従来の画像レーダ技術としては、合成開口レーダ(SAR:Synthetic Aperture Radar)や、ドップラービームシャープニング(DBS:Doppler Beam Sharpening)などが知られている(例えば、非特許文献1参照)。
しかし、これらの技術は、いずれも進行方向に対して横方向、あるいは、斜め前方を画像化することができても、正面を画像化することができない。その理由は、これらの技術は、本質的にプラットフォームの移動を利用して、仮想的にプラットフォームの進行方向に広がる大きなアレイアンテナを構成することによって、進行方向に平行な方向の分解能を稼ぐ手法だからである。また、受信信号のドップラー周波数は、プラットフォームの進行方向に対して対称な方向について等しいため、これらの技術を用いて正面方向付近を画像化すると、得られる画像は、プラットフォームの進行方向について左右折り返した画像になる。
【0004】
結局、移動体の進行方向の正面を向いているレーダの方位(アジマス)方向の分解能を高めるには、開口の大きなアレーアンテナ等が必要である。
しかしながら、グレーティングローブの発生を防ぐためには、素子アンテナを半波長間隔で配置する必要があるので、アレーアンテナの開口径が大きくなると、そのアレーアンテナを構成する素子アンテナの数が増大することになる。
そのため、従来のレーダ装置は、送信用アレーアンテナと受信用アレーアンテナを個別に備えることにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する方式を採用している(例えば、特許文献1参照)。以下、この方式を第1の方式と称する。
【0005】
この第1の方式では、送信用アレーアンテナと受信用アレーアンテナの素子間隔を半波長よりも広げることで素子数を削減する。
そして、送信用アレーアンテナの素子間隔と、受信用アレーアンテナの素子間隔とが異なるように、送信用アレーアンテナと受信用アレーアンテナを配置することにより、送信のアンテナパターン(以下、「送信パターン」という)に生じるグレーティングローブと、受信のアンテナパターン(以下、「受信パターン」という)に生じるグレーティングローブの間隔が一致しないようにして、送受信全体としてのパターン(以下、「送受信パターン」という)に生じるグレーティングローブを抑圧する。
さらに、送信パターンと受信パターンを同期させて走査することにより、領域を走査して観測するようにする。
【0006】
その他にも、素子アンテナを不等間隔に配置することにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する第2の方式が知られている(例えば、非特許文献2参照)。
【0007】
【特許文献1】米国特許 3,825,928 “High Resolution Bistatic Rader System”
【非特許文献1】D.R.Wehner,“High−Resolution Radar Second Edition,”Artech House Inc,1995
【非特許文献2】A.Manikas and C.Proukakis, “Modeling and Estimation of Ambiguities in Linear Arrays,” IEEE Transactions on Signal Processing,Vol.46,No.8,August 1998
【発明の開示】
【発明が解決しようとする課題】
【0008】
従来のレーダ装置は以上のように構成されているので、第1の方式では、送受信パターンに生じるグレーティングローブを十分に低く抑えるには、素子アンテナの配置に制約が生じる。送信アレーアンテナの素子間隔と受信アレーアンテナの素子間隔が、所定の制約を満たさない場合、例えば、受信パターンに生じるグレーティングローブが、送信パターンのサイドローブの方向と一致して、送受信パターンに比較的高いグレーティングローブが生じてしまうことがある課題があった。
また、第1の方式では、観測範囲が重複しないように、かつ、隙間なく広い領域を観測しようとすると、送受信パターンの角度分解能に相当する角度刻みで走査する必要がある。そのため、走査時間が長くなる問題もあった。
一方、第2の方式では、グレーティングローブを抑圧することができても、サイドローブレベルが全体に上昇してしまう課題があった。
【0009】
この発明は上記のような課題を解決するためになされたもので、走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係るレーダ装置は、不等間隔に配置されている複数の素子アンテナから構成され、かつ、送信手段の送信アンテナより開口長が長い受信アンテナを用いて、目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段とを設け、その受信手段により繰り返し受信されたパルス信号と荷重計算手段により計算された荷重とを用いて、受信ビームを形成するようにしたものである。
【発明の効果】
【0011】
この発明によれば、不等間隔に配置されている複数の素子アンテナから構成され、かつ、送信手段の送信アンテナより開口長が長い受信アンテナを用いて、目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段とを設け、その受信手段により繰り返し受信されたパルス信号と荷重計算手段により計算された荷重とを用いて、受信ビームを形成するように構成したので、パルスを繰り返し送受信して得られた受信信号に対するパルスドップラー処理において生じる左右対称の折り返し方向に、受信ビームのナルのパターンを組み合わせることによって、受信アンテナの素子数を削減すると同時に、この折り返しを抑圧でき、また走査時間の長時間化を招くことなく、観測領域を広げることができる。
【発明を実施するための最良の形態】
【0012】
実施の形態1.
図1はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、送信器1は基準となるパルス信号を生成し、そのパルス信号を繰り返し送信アンテナ2に出力する。送信アンテナ2は送信器1から出力されたパルス信号を目標24に向けて繰り返し送信する。なお、送信器1と送信アンテナ2から送信手段が構成されている。
【0013】
受信アンテナ3は不等間隔に配置されている複数の素子アンテナ4−1,4−2,・・・,4−Nから構成され、受信アンテナ3の開口長(アレー長)が送信アンテナ2の開口長よりも長くなるように構成されている。
受信器5−1,5−2,・・・,5−Nは受信アンテナ3の素子アンテナ4−1,4−2,・・・,4−Nを用いて、目標24に反射されたパルス信号を受信して増幅する。
A/D変換器6−1,6−2,・・・,6−Nは受信器5−1,5−2,・・・,5−Nにより増幅されたアナログのパルス信号をディジタルのパルス信号に変換する。
記憶部7はA/D変換器6−1,6−2,・・・,6−NによりA/D変換されたパルス信号を一時的に格納するメモリである。
レンジ圧縮部8は記憶部7に記憶されているパルス信号に対するパルス圧縮処理を実施して、レンジ分解能を高めた信号(以下、「レンジプロフィール」という)を取得する。
なお、受信アンテナ3、受信器5−1,5−2,・・・,5−N、A/D変換器6−1,6−2,・・・,6−N、記憶部7及びレンジ圧縮部8から受信手段が構成されている。
【0014】
対称方向抑圧用フィルタ生成部9は送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算する荷重計算手段を構成している。
ビーム合成部10はレンジ圧縮部8により取得されたレンジプロフィールと対称方向抑圧用フィルタ生成部9により計算された荷重を合成して、受信ビームを形成する受信ビーム形成手段を構成している。
【0015】
自機位置情報収集部11は例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体の現在位置を示す位置情報を収集する。
合成開口処理部12は自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段を構成している。
合成開口処理部12の動き補償部13は自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームの位相を補償する。
合成開口処理部12のコヒーレント積分部14は動き補償部13による位相補償後の受信ビームをコヒーレント積分する。
【0016】
次に動作について説明する。
まず、送信器1は、基準となるパルス信号を生成し、そのパルス信号を周期Tpriの間隔で繰り返し送信アンテナ2に出力することにより、P個のパルス信号を目標24に向けて送信する。
ここで、送信アンテナ2の開口長(アレー長)をLt、パルス信号の波長をλとすると、送信アンテナ2の主ビームのnull to nullの幅Δθt[rad]は、下記の式(1)で与えられる。
Δθt=2λ/Lt (1)
ただし、送信アンテナ2は、電子的あるいは機械的に送信パターンの主ビームの中心方向θcを走査できるものとする。
【0017】
送信アンテナ2から送信されたP個のパルス信号は目標24に照射されて反射され、受信アンテナ3に到来する。
ここで、受信アンテナ3は、図2に示すように、N個の素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいるものとする。素子アンテナ4−1,4−2,・・・,4−Nの配置はパラメータdnで表現している。
したがって、図2の例では、素子アンテナ4−1,4−2,・・・,4−Nの間隔は、d1,d2−d1,・・・,dN−1−dN−2の不等間隔になる。
受信アンテナ3の開口長をLrとすると、素子アンテナ4−1,4−2,・・・,4−Nの配置を示すパラメータとの関係で、下記の式(2)が成立する。
Lr=dN−1 (2)
受信アンテナ3の主ビーム幅Δθr[rad]は、下記の式(3)で与えられる。
Δθr=2λ/Lr (3)
【0018】
図2では、N個の素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいるものについて示したが、N個の素子アンテナ4−1,4−2,・・・,4−Nが不等間隔に配列されていればよく、例えば、2次元状に配列されていてもよい。
【0019】
受信器5−1,5−2,・・・,5−Nは、受信アンテナ3の素子アンテナ4−1,4−2,・・・,4−Nを用いて、目標24に反射されたパルス信号を受信して増幅する。
A/D変換器6−1,6−2,・・・,6−Nは、受信器5−1,5−2,・・・,5−Nにより増幅されたアナログのパルス信号を受けると、そのアナログのパルス信号をディジタルのパルス信号に変換する。
記憶部7は、A/D変換器6−1,6−2,・・・,6−NによりA/D変換されたパルス信号を一時的に格納する。
レンジ圧縮部8は、記憶部7に記憶されているP個のパルス信号に対するパルス圧縮処理を実施することにより、レンジ分解能を高めた信号、即ち、レンジプロフィールを取得する。
ここで、レンジビン数をM、nをN以下の自然数、mをM以下の自然数として、レンジ圧縮部8から出力されるレンジプロフィールをXn,m(p)(p=1,2,・・・,P)とする。
【0020】
対称方向抑圧用フィルタ生成部9は、送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算する。
具体的には、次のようにして荷重を計算する。
【0021】
まず、ビームを向けたい所望の方向(送信パターンの主ビーム内の方向)θfに対応するステアリングベクトルをa(θf)とし、ナルを形成したいアジマス方向(例えば、移動体の進行方向に対して左右対称な方向)θsgに対応するステアリングベクトルをa(θsg)(g=1,2,・・・,G)とする。
ここでは一般化のため、G個の異なる方向にナルを形成することを考える。これらのステアリングベクトルは次式で表される。以下、ビームを向けたい所望の方向のことをステアリング角と呼ぶことにする。
a(θf)=[1 exp((2πj・d1・sinθf))/λ)
・・・exp((2πj・dM−1・sinθf)/λ)]T (4)
a(θsg)=[1 exp((2πj・d1・sinθsg)/λ)
・・・exp((2πj・dM−1・sinθsg)/λ)]T (5)
g=1,2,・・・,G
ただし、式(4)(5)における上付きのTは行列の転置を表している。
【0022】
次に、N個の素子アンテナ4−1,4−2,・・・,4−Nに対する荷重wn(n=1,2,・・・,N)をまとめた荷重ベクトルwを次式のように定義する。
w=[w1 w2 ・・・ wN]T (6)
対称方向抑圧用フィルタ生成部9は、ステアリング角方向のゲインを1として、抑圧したいアジマス方向にナルを生成するために、次式で定義される二乗誤差σを最小化するように荷重wを決定する。
σ=‖y−A・w‖2 (7)
【0023】
ただし、Aはステアリング角度とナルを形成するアジマス方向に対応するステアリングベクトルをまとめた(G+1)×Nの行列であり、下記の式(8)で表される。
yは所望のゲインパターンを表す(G+1)次元のベクトルである。
ステアリング角θfの方向にピークを持ち、θsgの方向にナルを持つパターンを生成するためには、ベクトルyは下記の式(9)のように設定される。
A=[a(θf) a(θs1) ・・・ a(θsG)]*T (8)
y=[1 ε ・・・ ε]T (ε≪1) (9)
ただし、上付きの*は複素共役を表している。
【0024】
これにより、荷重wは、下記の式(10)に示すように、最小二乗法によって求めることができる。
w=A+y (10)
ただし、式(10)における上付きの+は疑似逆行列を表している。
【0025】
対称方向抑圧用フィルタ生成部9は、マルチビームを形成するために、全てのステアリング角θf,k(k=1,2,・・・,K)と、そのときに抑圧したい方向θsg,kの組み合わせについて、上記の計算を反復することにより、必要な数だけ荷重wkを計算する。
ここで、Kは形成するビームの数である。
wk=Ak+y (k=1,2,・・・,K) (11)
Ak=[a(θf,k) a(θs1,k) ・・・ a(θsG,k)]*T
(12)
【0026】
対称方向抑圧用フィルタ生成部9は、方向θsg,kの組みが、−θf,kを含むように設定し、式(11)にしたがって、所望のK通りのビームパターンを形成するための荷重を計算する。
対称方向抑圧用フィルタ生成部9により計算された荷重wを用いて形成される受信ビームパターンは、所望方向θf,kにピークをもち、これと進行方向について対称な方向−θf,kにナルを向けるパターンとなる。
【0027】
ビーム合成部10は、上記のようにして、対称方向抑圧用フィルタ生成部9が荷重wkを計算すると、下記の式(13)に示すように、レンジ圧縮部8により取得されたレンジプロフィールXn,m(p)と荷重wkを合成して、受信ビームを形成する。
Ym=W*TXm(p) (13)
W=[w1 w2 ・・・ wK] (14)
Xm(p)=[X1,m(p) X2,m(p) ・・・ XN,m(p)]T
(15)
Ym(p)=[Y1,m(p) Y2,m(p) ・・・ YK,m(p)]T
(16)
式(16)におけるYk,m(p)は、p個目のパルス信号を送受信したときの、k番目のビームにおけるレンジプロフィールのm番目のレンジセルの信号である。
ビーム合成部10は、このレンジプロフィールYk,m(p)を合成開口処理部12に出力する。
なお、各レンジセルについて、K個のビームの信号をまとめたベクトルをYm(p)と定義している。
【0028】
自機位置情報収集部11は、例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体の現在位置を示す位置情報を収集する。
合成開口処理部12は、自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10から出力されたレンジプロフィールYk,m(p)に対する合成開口処理を実施する。
具体的には、次のようにして合成開口処理を実施する。
【0029】
合成開口処理部12の動き補償部13は、自機位置情報収集部11により収集された位置情報を用いて、目標24に反射されたパルス信号の時刻tにおける位相を求める。
図3はパルス信号の位相を算出する方法を説明する説明図である。
図において、符号21〜23が指し示すのは、移動体に搭載された送信アンテナ2及び受信アンテナ3が各時刻において存在している地点である。図3の例では、送信アンテナ2及び受信アンテナ3は速度vで直線運動しているものとする。
また、地点21から地点23に移動する間に時間Tが経過するものとする。この場合、地点21と地点23の距離はv×Tとなる。
また、地点22は地点21と地点23の中間点であるものとし、ここでは、地点22をx−y座標系の原点Oにとり、送信アンテナ2及び受信アンテナ3の移動する方向をy軸の正方向とする。
さらに、y軸の正方向とアジマス方向に角度θをなす位置に目標24が存在しており、原点Oと目標24の距離をR0とする。以後の説明では、角度θをスクイント角と呼ぶことにする。
【0030】
図3から明らかなように、移動体から目標24までの時刻tにおける距離R(θ,t)は、余弦定理より、下記の式(17)で算出される。
R(θ,t)=(R02+(v・t)2−2R0・v・t・cosθ)1/2 (17)
式(17)において、移動体の移動距離vtが距離R0と比べて短い場合、式(17)の右辺を式(18)のように近似することができる。
R(θ,t)≒R0−v・t・cosθ (18)
【0031】
式(18)を用いれば、波長λで送受信されたパルス信号は、R(θ,t)の距離を往復するので、位相φ(θ,t)は下記の式(19)で与えられる。
したがって、動き補償部13は、下記の式(19)を計算することにより、目標に反射されたパルス信号の時刻tにおける位相φ(θ,t)を求める。
φ(θ,t)=4π・R(θ,t)/λ
≒4π(R0−v・t・cosθ)/λ (19)
【0032】
次に、動き補償部13は、受信したP個のパルス信号、即ち、ビーム合成部10から出力されたレンジプロフィールYk,m(p)を必要なだけシフトして、目標24を含むレンジビンが同じレンジビン番号mとなるように調整する。
ここでのシフト量は、ビームのステアリング角θf,kに依存する。繰り返し周期Tpriで、p個のパルス信号を送信する間に移動体が移動する距離はv×p×Tpriであるから、ステアリング角θf,k方向におけるレンジプロフィールのシフト量sk(p)を下記の式(20)によって計算することができる。
sk(p)=v・p・Tpri・cosθf,k (20)
【0033】
ビーム毎に式(20)によって計算されるシフト量sk(p)だけレンジプロフィールYk,m(p)をシフトして、レンジビンを揃えたレンジプロフィールをY’k,m(p)とする。
動き補償部13は、式(19)によって計算される位相φ(θ,t)を下記の式(21)にしたがって補償する。
Zq,m(p)=Y’k,m(p)exp{−jφ(θq,pTpri)} (21)
p=1,2,・・・,P
q=1,2,・・・,Q
k=1,2,・・・,K
m=1,2,・・・,M
ここで、Qはコヒーレント積分後のアジマス方向のサンプル数である。ただし、θq方向に十分な受信ゲインが取れるようにするため、θqとθf,kは、下記の式(22)を満たすことが望ましい。
|θq−θf,k|≦Δθr/2 (22)
【0034】
合成開口処理部12のコヒーレント積分部14は、上記のようにして、動き補償部13が位相φ(θ,t)を補償すると、下記の式(23)に示すように、動き補償部13から出力される位相補償後の信号Zq,m(p)をコヒーレント積分する。
<Zq,m>=ΣZq,m(p) (23)
q=1,2,・・・,Q
m=1,2,・・・,M
ただし、式(23)におけるΣは和記号であり、p=1からPまでのZq,m(p)の和を計算する。
【0035】
ただし、送信パターンがアジマス方向に走査している場合、あるアジマス方向θkについて積分できるパルス数は、送信パターンのメインビームの照射範囲が、そのアジマス方向θkを含んでいる間に送受信されたパルスの数で決まる。
また、送信パターンが角速度ωで走査している場合、そのアジマス方向θkについて積分できるパルス数P0は、下記の式(24)から算出することができる。
P0=[θmax/(ω・Tpri)] (24)
P0≦P
【0036】
ここで、θmaxは送信パターンにおいて、ピークのゲインに対して十分に高いゲインを持っているとみなせる角度幅である。したがって、θmaxとしては、例えば、ビームの半値幅などを用いることができる。
なお、式(24)の[]は、その中身の式、即ち、θmax/ω・Tpriの値を超えない最大の整数である。
コヒーレント積分部14は、同一の方向について、式(13)に基づいて得られた回数分のレンジプロフィールを式(23)に基づいて積分して<Yk,m>を求める。
【0037】
ところで、式(21)と式(23)は、スクイント方向のSAR(Synthetic Aperture Rader、合成開口レーダ)の処理を表すものである。
式(23)によるコヒーレント積分後のアジマス分解能Δθdは、下記の式(25)で算出されることが知られている。
Δθd=λ/(2v・T・sinθ) (25)
【0038】
ただし、式(25)において、分解能を4dB幅で定義している。
一般に知られているように、SARの処理によって進行方向正面付近の方位方向の分解能は向上しない。このことは、式(25)において、θ=0とすると、右辺が発散することからも確かめられる。
つまり、観測領域全体にわたって式(25)の分解能が達成されるわけではない。結局、全体としての方位方向の分解能は、受信アンテナ3の開口長Lrによって決まる分解能Δθrと、式(25)の分解能Δθdのうち、高い方の分解能によって求められる。
即ち、min{A,B}が、AとBのうち、小さい方を選択する式とすれば、分解能Δθは、下記の式(26)で与えられる。
Δθ=min{Δθr/2,Δθd}
=min{λ/Lr,λ/(2v・T・sinθ)} (26)
【0039】
一方、スクイント角θが大きい領域では、式(23)のコヒーレント積分の結果得られる方位方向の角度分解能は、受信パターンの主ビームの太さで決まる角度分解能よりも高くなる場合がある。
このことから、式(22)を満たすようにθqを決定する場合には、θqをθkよりも細かく刻んで決定することが望ましいことが分かる。
【0040】
また、式(19)に示すように、移動体から目標24までの距離R(θ,t)によって決まるパルス信号の位相φ(θ,t)は、スクイント角θに関して遇関数である。
したがって、式(23)のコヒーレント積分の結果は、スクイント角がθq方向の信号について値が増大するのと同時に、移動体の進行方向について対称な−θq方向の信号も増大する。
そのため、従来のスクイントモードSARの処理だけでは、進行方向を軸に左右折り返した画像が得られる。
ところが、この実施の形態1では、対称方向抑圧用フィルタ生成部9により計算された荷重を用いて受信ビームを形成するため、ビーム形成後の各ビームのレンジプロフィールYk,m(p)においては、左右対称な方向からの信号がすでに抑圧されている。
【0041】
以上で明らかなように、この実施の形態1によれば、不等間隔に配置されている素子アンテナ4−1,4−2,・・・,4−Nから構成され、かつ、送信アンテナ2より開口長が長い受信アンテナ3を用いて、目標24に反射されたパルス信号を繰り返し受信する受信器5−1,5−2,・・・,5−Nのほか、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9などを設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて、受信ビームを形成するように構成したので、走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができる効果を奏する。
【0042】
即ち、素子アンテナ4−1,4−2,・・・,4−Nを不等間隔に配置し、移動によって生じるレンジのシフトと位相の変化を補償してコヒーレント積分するので、進行方向の正面については、受信アンテナ3の開口長で決まる角度分解能を得ることができ、進行方向の斜め前方については、スクイントモードSAR相当の分解能を得ることができる。同時に、不等間隔に配置している素子アンテナ4−1,4−2,・・・,4−Nを用いて、ステアリング角度と進行方向について左右対称な方向にナルをもつビームパターンを形成するので、従来のスクイントモードSARで発生していた左右対称方向の信号の折り返しを抑圧することができる。
【0043】
なお、この実施の形態1では、素子アンテナ4−1,4−2,・・・,4−Nが直線状に並んでいる受信アンテナ3を用いるものについて示したが、素子アンテナ4−1,4−2,・・・,4−Nが不等間隔に配置されていればよく、例えば、素子アンテナ4−1,4−2,・・・,4−Nが2次元に配置されている受信アンテナ3を用いてもよい。
また、送信アンテナ2のアンテナ方式は、特に制限がなく、フェーズドアレーアンテナや開口面アンテナなど、いずれのアンテナ方式であっても構わない。
また、この実施の形態1では、受信アンテナ3の開口面が移動体の進行方向を向いているものについて示したが、他の方向を向いている場合についても容易に拡張できることは言うまでもない。
【0044】
実施の形態2.
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
ドップラー折り返し方向抑圧用フィルタ生成部15は図1の対称方向抑圧用フィルタ生成部9と同様にして、送信パターンの主ビーム内に受信ビームを形成し、かつ、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算するほか、ドップラーの折り返し方向にナルを形成するための荷重を計算する。なお、ドップラー折り返し方向抑圧用フィルタ生成部15は荷重計算手段を構成している。
【0045】
次に動作について説明する。
ドップラー折り返し方向抑圧用フィルタ生成部15以外の構成部分は、上記実施の形態1と同様であるため、ドップラー折り返し方向抑圧用フィルタ生成部15の動作についてのみ説明する。
【0046】
ここでは、ステアリング角度をθf,k、ドップラーの折り返しが生じる方向をθdh,kと表すものとする。
パルス繰り返し周期Tpriで送受信を行っている場合、ドップラー周波数の折り返しは1/Tpriの幅で繰り返し発生する。アジマス方向の角度とドップラー周波数の関係から、ステアリング角度がθf,kのときの、ドップラーの折り返しが生じる方向θdh,kは、下記の式(27)の関係を満足する。ただし、hは自然数である。
(2v・cosθf,k/λ)−(2v・cosθdh,k/λ)=h/Tpri
(27)
【0047】
式(27)を変形すると、ドップラーの折り返しが生じる方向θdh,kは下記の式(28)のように表される。
θdh,k=cos−1(cosθf,k−h・λ/(2v・Tpri)) (28)
【0048】
まず、ドップラー折り返し方向抑圧用フィルタ生成部15は、波長λと、パルス繰返し周期Tpriと、自機位置情報収集部11から出力される移動体の速度vの値を式(28)に代入して、ドップラー折り返し方向θdh,kを計算する。
次に、ドップラー折り返し方向抑圧用フィルタ生成部15は、ドップラー折り返し方向θdh,kにナルを形成する荷重wkを計算する。
荷重wkの計算方法は、上記実施の形態1における対称方向抑圧用フィルタ生成部9と同様である。
【0049】
即ち、ドップラー折り返し方向抑圧用フィルタ生成部15は、ステアリング方向θf,kに対応するステアリングベクトルをa(θf,k)として、ナルを形成する対称方向の近傍θsg,kに対応するステアリングベクトルをa(θsg,k)(g=1,2,・・・,G)、ナルを形成するドップラー折り返し方向θdh,kに対応するステアリングベクトルをa(θdh,k)(h=1,2,・・・,H)とする。
a(θf)=[1 exp((2πj・d1・sinθf)/λ)
・・・exp((2πj・dM−1・sinθf)/λ)]T (29)
a(θsg)=[1 exp((2πj・d1・sinθsg)/λ)
・・・exp((2πj・dM−1・sinθsg)/λ)]T(30)
g=1,2,・・・,G
a(θdh,k)=[1 exp((2πj・d1・sinθdh,k)/λ)
・・・exp((2πj・dM−1・sinθdh,k)/λ)]T
(31)
h=1,2,・・・,H
【0050】
ここで、Hはナルを形成して抑圧するドップラー折り返し方向の数であり、観測領域の幅、パルス繰返し周期Tpri、移動体の速度vなどによって決定される。
ドップラー折り返し方向抑圧用フィルタ生成部15は、ステアリング角方向のゲインを1として、抑圧したいアジマス方向にナルを生成する荷重wkを下記の式(32)によって計算する。
wk=Ak+y (32)
k=1,2,・・・,K
Ak=[a(θf,k) a(θs1,k) ・・・ a(θsG,k)
a(θd1,k) ・・・ a(θdH,k)]*T (33)
y=[1 ε ・・・ ε]T (ε≪1) (34)
【0051】
ただし、Aはステアリング角度と、ナルを形成するアジマス方向に対応するステアリングベクトルをまとめた(G+H+1)×Nの行列であり、yは所望のゲインパターンを表す(G+H+1)次元のベクトルである。
また、ステアリング角θf,kの方向にピークを持ち、θsg,k、θdh,kの方向にナルを持つパターンを生成するため、ベクトルyは式(34)のように設定される。
ドップラー折り返し方向抑圧用フィルタ生成部15により計算された荷重wkは、ビーム合成部10に出力される。その他の動作は、上記実施の形態1と同様である。
【0052】
以上で明らかなように、この実施の形態2によれば、ドップラーの折り返し方向θdh,kにナルを形成するための荷重wkを計算するように構成したので、上記実施の形態1のレーダ装置で得られる効果のほか、ドップラーの折り返し方向に生じるピークを抑圧することができる効果を奏する。
【0053】
実施の形態3.
図5はこの発明の実施の形態3によるレーダ装置を示す構成図であり、図において、図4と同一符号は同一または相当部分を示すので説明を省略する。
図5の合成開口処理部16は図1及び図4の合成開口処理部12と同様に、自機位置情報収集部11により収集された位置情報を用いて、ビーム合成部10により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段を構成している。
合成開口処理部16のレンジマイグレーション補償部17はビーム合成部10から出力されたレンジプロフィールに対するレンジマイグレーション補償(移動体の移動によるレンジプロフィールのシフト分の補償)を実施する。
合成開口処理部16の位相補償部18は注目するシーン中心の位相を補償する。
合成開口処理部16の高速フーリエ変換部19は位相補償部18による位相補償後の信号をヒット方向に高速フーリエ変換する。
【0054】
次に動作について説明する。
合成開口処理部16以外の構成部分は、上記実施の形態1,2と同様であるため、合成開口処理部16の動作についてのみ説明する。
【0055】
合成開口処理部16のレンジマイグレーション補償部17の処理内容は、上記実施の形態1における動き補償部13におけるレンジプロフィールのシフト処理と同様であり、受信したP個のパルス信号のレンジプロフィールYk,m(p)を必要なだけシフトして、目標24を含むレンジビンが同じレンジビン番号mとなるように調整する。
ここでのシフト量は、ビームのステアリング角θf,kに依存する。
繰り返し周期Tpriで、p個のパルス信号を送信する間に移動体が移動する距離は、v×p×Tpriであるから、ステアリング角θf,k方向におけるレンジプロフィールのシフト量sk(p)を上記の式(20)によって計算することができる。
【0056】
レンジマイグレーション補償部17は、ビーム毎に式(20)にしたがって計算されるシフト量sk(p)だけレンジプロフィールYk,m(p)をシフトして、レンジビンを揃えたレンジプロフィールY’k,m(p)を位相補償部18に出力する。
【0057】
合成開口処理部16の位相補償部18は、受信ビームの位相の二次以上の変化を補償する。即ち、ビームの中心方向の位相分を下記の式(35)にしたがって補償する。
Zf,k,m(p)=Y’k,m(p)exp{−jφ(θf,k,pTpri)}
(35)
p=1,2,・・・,P
k=1,2,・・・,K
m=1,2,・・・,M
【0058】
上記のようにして、位相補償部18が式(35)にしたがってビームの中心θf,k方向の位相を補償すると、θf,kに隣接する角度からの信号成分の位相変化が概ねリニアになるため、パルスヒット方向にフーリエ変換することにより、アジマス方向の分解能を高めることができる。
合成開口処理部16の高速フーリエ変換部19は、レンジビンを揃えて、式(35)の位相補償処理を行って得られるレンジプロフィールZf,k,m(p)に対して、レンジビン毎に高速フーリエ変換を実施する。
【0059】
以上で明らかなように、この実施の形態3によれば、高速フーリエ変換を実施して合成開口処理を行うように構成したので、演算量を削減することができるようになり、処理時間を短縮することができる効果を奏する。
【図面の簡単な説明】
【0060】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】受信アンテナの開口長と、受信アンテナを構成する素子アンテナの配置を示す説明図である。
【図3】パルス信号の位相を算出する方法を説明する説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【図5】この発明の実施の形態3によるレーダ装置を示す構成図である。
【符号の説明】
【0061】
1 送信器(送信手段)、2 送信アンテナ(送信手段)、3 受信アンテナ(受信手段)、4−1,4−2,・・・,4−N 素子アンテナ、5−1,5−2,・・・,5−N 受信器(受信手段)、6−1,6−2,・・・,6−N A/D変換器(受信手段)、7 記憶部(受信手段)、8 レンジ圧縮部(受信手段)、9 対称方向抑圧用フィルタ生成部(荷重計算手段)、10 ビーム合成部(受信ビーム形成手段)、11 自機位置情報収集部、12 合成開口処理部(合成開口処理手段)、13 動き補償部、14 コヒーレント積分部、15 ドップラー折り返し方向抑圧用フィルタ生成部(荷重計算手段)、16 合成開口処理部(合成開口処理手段)、17 レンジマイグレーション補償部、18 位相補償部、19 高速フーリエ変換部、21 地点、22 地点、23 地点、24 目標。
【特許請求の範囲】
【請求項1】
パルス信号を目標に向けて繰り返し送信する送信手段と、不等間隔に配置されている複数の素子アンテナから構成され、かつ、上記送信手段の送信アンテナより開口長が長い受信アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段と、上記受信手段により繰り返し受信されたパルス信号と上記荷重計算手段により計算された荷重とを用いて、受信ビームを形成する受信ビーム形成手段と、上記受信ビーム形成手段により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項2】
荷重計算手段は、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算することを特徴とする請求項1記載のレーダ装置。
【請求項3】
荷重計算手段は、ドップラーの折り返し方向にナルを形成するための荷重を計算することを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
合成開口処理手段は、受信ビーム形成手段により形成された受信ビームの位相を補償し、位相補償後の受信ビームをコヒーレント積分することを特徴とする請求項1から請求項3のうちのいずれか1項記載のレーダ装置。
【請求項5】
合成開口処理手段は、受信ビーム形成手段により形成された受信ビームに対するレンジマイグレーション補償を実施してから、その受信ビームの位相の二次以上の変化を補償し、位相補償後の受信ビームをフーリエ変換することを特徴とする請求項1から請求項3のうちのいずれか1項記載のレーダ装置。
【請求項1】
パルス信号を目標に向けて繰り返し送信する送信手段と、不等間隔に配置されている複数の素子アンテナから構成され、かつ、上記送信手段の送信アンテナより開口長が長い受信アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する荷重計算手段と、上記受信手段により繰り返し受信されたパルス信号と上記荷重計算手段により計算された荷重とを用いて、受信ビームを形成する受信ビーム形成手段と、上記受信ビーム形成手段により形成された受信ビームに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項2】
荷重計算手段は、移動体の進行方向に対して左右対称な方向にナルを形成するための荷重を計算することを特徴とする請求項1記載のレーダ装置。
【請求項3】
荷重計算手段は、ドップラーの折り返し方向にナルを形成するための荷重を計算することを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
合成開口処理手段は、受信ビーム形成手段により形成された受信ビームの位相を補償し、位相補償後の受信ビームをコヒーレント積分することを特徴とする請求項1から請求項3のうちのいずれか1項記載のレーダ装置。
【請求項5】
合成開口処理手段は、受信ビーム形成手段により形成された受信ビームに対するレンジマイグレーション補償を実施してから、その受信ビームの位相の二次以上の変化を補償し、位相補償後の受信ビームをフーリエ変換することを特徴とする請求項1から請求項3のうちのいずれか1項記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−162518(P2006−162518A)
【公開日】平成18年6月22日(2006.6.22)
【国際特許分類】
【出願番号】特願2004−357091(P2004−357091)
【出願日】平成16年12月9日(2004.12.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年6月22日(2006.6.22)
【国際特許分類】
【出願日】平成16年12月9日(2004.12.9)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]