
レーダ装置
【課題】 受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができるレーダ装置を得ることを目的とする。
【解決手段】 送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成し、その受信ビームパターンに対する合成開口処理を実施するように構成する。
【解決手段】 送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成し、その受信ビームパターンに対する合成開口処理を実施するように構成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、距離(レンジ)方向と方位(アジマス)方向に高い分解能を有するレーダ装置に関するものである。
【背景技術】
【0002】
レーダ装置は、例えば、航空機や自動車などの移動体に搭載され、その移動体の進行方向の正面のレーダ画像を生成する技術を実装している。
レーダの波長は、光と比べて長いため、霧などの悪視界環境下においても、遠方の画像を生成することができる利点がある。
したがって、レーダ装置を例えば航空機に搭載すれば、進行方向の視界が悪い環境でも、移動体の進行方向の正面の画像を正確に生成して、航空機の着陸支援などに寄与することができる。
【0003】
従来の画像レーダ技術としては、合成開口レーダ(SAR:Synthetic Aperture Radar)やドップラービームシャープニング(DBS:Doppler Beam Sharpening)などが知られている(例えば、非特許文献1参照)。
しかし、これらの画像レーダ技術は、いずれも移動体の進行方向の横、あるいは、斜め前方を画像化することができるが、正面を画像化することができない。
その理由は、これらの画像レーダ技術は、本質的にプラットフォームの移動を利用して、仮想的にプラットフォームの進行方向に広がる大きなアレイアンテナを構成することによって、移動体の進行方向に平行な方向の分解能を稼ぐ手法だからである。
したがって、SARやDBSの処理を実施して、移動体の進行方向を画像化すると、真正面方向については、十分な分解能を得ることができない。
【0004】
そこで、移動体の真正面方向について、十分な分解能を得ることができるようにするためには、実開口長の大きなアレイアンテナを用いる方法が考えられる。
例えば、プラットフォームが航空機である場合、その航空機の主翼にアンテナを並べれば、両翼端の幅に相当する長さのアレイアンテナを構成することができるため、実開口長を大きくすることができる。
具体的には、例えば、正面方向のX帯のレーダ画像を生成することを考えると、両翼端の幅が10m、波長が3cmであれば、角度分解能が3mrad程度の画像を得ることができる。
しかし、グレーティングローブの発生を防止するために、半波長(1.5cm)間隔で素子アンテナを配置すると、素子アンテナが666個必要になり、多数の素子アンテナを主翼に配置する必要がある。
【0005】
素子アンテナの配置数を削減する技術として、送信用アレイアンテナと受信用アレイアンテナを個別に備えることにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する方式が知られている(例えば、特許文献1参照)。
この方式では、送信用アレイアンテナと受信用アレイアンテナの素子間隔を半波長よりも広げることで、素子アンテナの本数を削減している。
また、送信用アレイアンテナの素子間隔と、受信用アレイアンテナの素子間隔とが異なるように配置することで、送信のアンテナパターン(以下、送信パターンと称する)に生じるグレーティングローブと、受信のアンテナパターン(以下、受信パターンと称する)に生じるグレーティングローブの間隔が一致しないようにして、送受信全体としてのパターン(以下、送受信パターンと称する)に生じるグレーティングローブを抑圧している。
さらに、送信パターンと受信パターンを同期させて走査することにより、領域を走査して観測するものである。
【0006】
また、SARやDBSの処理を実施して、移動体の進行方向を画像化すると、その画像は、移動体の進行方向を対称軸として、左右対称に折り返してしまう問題が発生する。
その理由は、移動体であるプラットフォームから左右対称な2点までの距離が常に等しいため、左右対称な2点からの反射信号の位相変化が完全に一致するからである。
この問題の解決策としては、モノパルスアンテナを利用して、Σチャネルにおける正面方向のSAR画像又はDBS画像を生成するとともに、Δチャネルにおける正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合して、左右対称の折り返しを抑圧する方式が知られている(例えば、特許文献2参照)。
この方式では、分解能が合成開口長によって決まるため、真正面については充分な分解能が得られないが、左右のアンビギュイティを抑圧することが可能である。しかし、アンテナパターンの計測誤差が、得られる画質に強く影響を与えることになる。
【0007】
この他にも、左右対称に折り返してしまう問題の解決策として、複数の受信アンテナを進行方向と直交する方向にアレイ状に配置し、複数の受信アンテナにより受信された信号を用いて、それぞれ正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合して、左右対称の折り返しを抑圧する方式が知られている(例えば、非特許文献2参照)。
しかし、各受信アンテナの位相中心の位置が移動体の進行方向に対して直交する方向にずれているため、各受信アンテナにより受信された信号を用いて、正面方向のSAR画像又はDBS画像を生成すると、これらの画像における折り返しの軸もずれている。
そのため、これらの画像の線形結合から得られる画像においては、左右の折り返しの電力抑圧比が高々アンテナ数の2乗となり、高い抑圧比を得るためには、受信アンテナ数を増加する必要がある。
【0008】
【特許文献1】米国特許第3,825,928号明細書 “High Resolution Bistatic Rader System”
【特許文献2】米国特許第4,978,961号明細書 “Synthetic Aperture Radar With Dead−Ahead Beam Sharpening Capability”
【非特許文献1】D.R.Wehner,“High−Resolution Radar Second Edition,”Artech House Inc,1995
【非特許文献2】長波長ホログラフィを用いた前方監視レーダの像再生法(電子情報通信学会論文誌 B−II Vol.J76−B−II,No.8,pp698−705,1993年8月)
【発明の開示】
【発明が解決しようとする課題】
【0009】
従来のレーダ装置は以上のように構成されているので、複数の受信アンテナを進行方向と直交する方向にアレイ状に配置し、複数の受信アンテナにより受信された信号を用いて、それぞれ正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合すれば、左右対称の折り返しを抑圧することができる。しかし、各受信アンテナの位相中心の位置が移動体の進行方向に対して直交する方向にずれているため、各受信アンテナにより受信された信号を用いて、正面方向のSAR画像又はDBS画像を生成すると、これらの画像における折り返しの軸もずれてしまう。そのため、これらの画像の線形結合から得られる画像においては、左右の折り返しの電力抑圧比が高々アンテナ数の2乗となり、高い抑圧比を得るためには、受信アンテナ数を増加する必要がある課題があった。
【0010】
この発明は上記のような課題を解決するためになされたもので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係るレーダ装置は、受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段を設け、その受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施するようにしたものである。
【発明の効果】
【0012】
この発明によれば、受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段を設け、その受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施するように構成したので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができる効果がある。
【発明を実施するための最良の形態】
【0013】
実施の形態1.
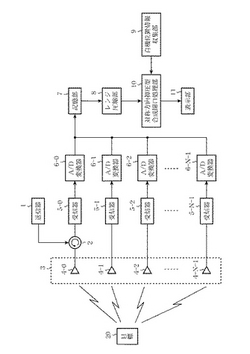
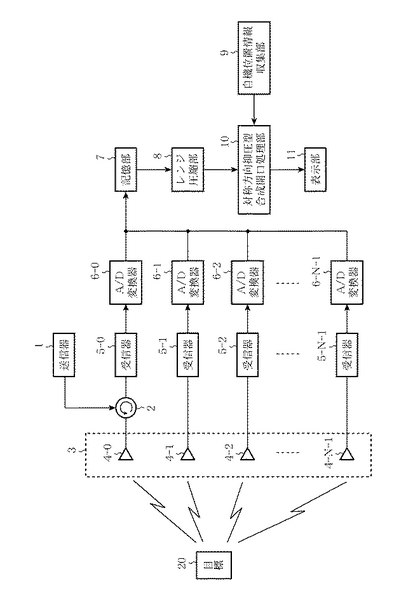
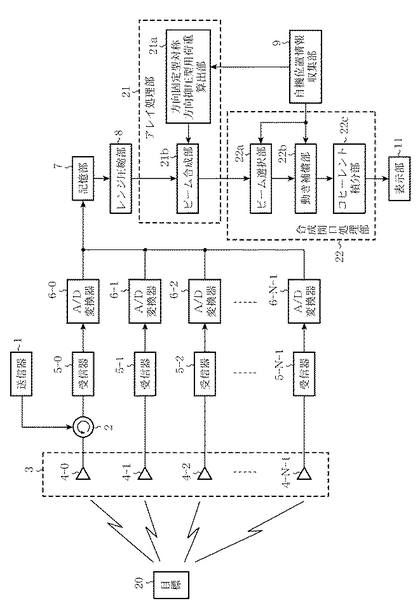
図1はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、送信器1は基準となるパルス信号を生成し、そのパルス信号を繰り返し送受切換器2に出力する処理を実施する。
送受切換器2は送信器1からパルス信号を受けると、そのパルス信号を送受信アンテナ4−0に出力する一方、送受信アンテナ4−0からパルス信号を受けると、そのパルス信号を受信器5−0に出力する処理を実施する。
受信アレイアンテナ3は送受信アンテナ4−0とN−1個の受信アンテナ4−1〜4−(N−1)から構成されているアレイアンテナである。
送受信アンテナ4−0は開口長がLtのアンテナであり、送受切換器2から出力されたパルス信号を目標20に向けて照射する一方、その目標20に反射されたパルス信号を受信する機能を備えている。なお、送信器1、送受切換器2、送受信アンテナ4−0から送信手段が構成されている。
【0014】
N−1個の素子アンテナである受信アンテナ4−1〜4−(N−1)はプラットフォーム(レーダ装置が搭載されている移動体)の進行方向に対して直交し、かつ、水平な方向に広がるように不等間隔で配置されており、目標20に反射されたパルス信号を受信する機能を備えている。
この実施の形態1では、受信アレイアンテナ3を構成する送受信アンテナ4−0がパルス信号の送信用と受信用を兼ねているものについて示しているが、その送受信アンテナ4−0を受信専用にして、別途、パルス信号を送信する送信アンテナを設けてもよい。
また、この実施の形態1では、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)の素子間隔が不等間隔であるものについて説明するが、素子間隔が必ずしも不等間隔である必要はない。
また、この実施の形態1では、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)の配列が直線状であるものについて説明するが、その配列が直線状でない場合や、その配列が2次元配列であってもよく、同様に適用することができる。
また、適当な通信手段を備えていれば、同一又は異なるプラットフォームに搭載された他のレーダ装置の送受信アンテナを使用することができる。
【0015】
受信器5−0,5−1,・・・,5−(N−1)は受信アレイアンテナ3の送受信アンテナ4−0又は受信アンテナ4−1〜4−(N−1)と接続され、送受信アンテナ4−0又は受信アンテナ4−1〜4−(N−1)により受信されたパルス信号を増幅する処理を実施する。
A/D変換器6−0,6−1,・・・,6−(N−1)は受信器5−0,5−1,・・・,5−(N−1)により増幅されたアナログのパルス信号をディジタルのパルス信号に変換する処理を実施する。
記憶部7はA/D変換器6−0,6−1,・・・,6−(N−1)によりA/D変換されたパルス信号を一時的に格納するメモリである。
レンジ圧縮部8は記憶部7に記憶されているパルス信号に対するパルス圧縮処理を実施して、レンジ分解能を高めた信号(以下、「レンジプロフィール」という)を取得する処理を実施する。
なお、受信アレイアンテナ3、受信器5−0,5−1,・・・,5−(N−1)、A/D変換器6−0,6−1,・・・,6−(N−1)、記憶部7及びレンジ圧縮部8から受信手段が構成されている。
【0016】
自機位置情報収集部9は例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体であるプラットフォームの自機位置、速度及び姿勢を示す自機位置情報を収集する機能を備えている。
対称方向抑圧型合成開口処理部10は自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、レンジ圧縮部8から出力されるレンジプロフィール毎に、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成して、その受信ビームパターンに対する合成開口処理を実施する処理を実施する。
なお、自機位置情報収集部9及び対称方向抑圧型合成開口処理部10から受信ビームパターン形成手段が構成され、自機位置情報収集部9及び対称方向抑圧型合成開口処理部10から合成開口処理手段が構成されている。
表示部11は対称方向抑圧型合成開口処理部10の合成開口処理により生成されたレーダ画像を表示する処理を実施する。
【0017】
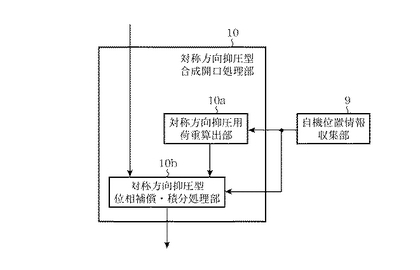
図2はこの発明の実施の形態1によるレーダ装置の対称方向抑圧型合成開口処理部10を示す構成図であり、対称方向抑圧用荷重算出部10aは自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルを形成するための荷重ベクトルを算出する処理を実施する。
対称方向抑圧型位相補償・積分処理部10bは対称方向抑圧用荷重算出部10aにより算出された荷重ベクトルをレンジ圧縮部8から出力されるレンジプロフィールに乗算して、その対称な方向にナルが存在する受信ビームパターンを形成するとともに、その受信ビームパターンに対する合成開口処理、即ち、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号(レンジプロフィール)をコヒーレント積分する合成開口処理を実施してレーダ画像を生成する。
【0018】
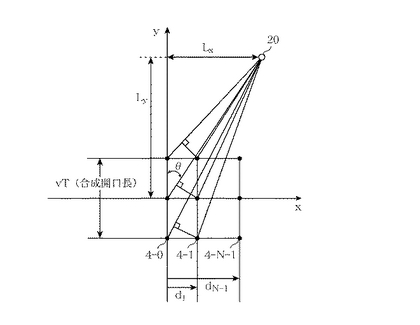
図3はこの発明の実施の形態1によるレーダ装置における送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)の配置と、プラットフォームの移動を説明する説明図である。
図3では、x座標軸がプラットフォームの進行方向と垂直な方向(図中、水平な方向)に取られ、y座標軸がプラットフォームの進行方向と平行な方向に取られている。
プラットフォームは、y軸の正の方向に速度vで等速度運動するものとする。
また、送受信アンテナ4−0と、N−1個の受信アンテナ4−1〜4−(N−1)はプラットフォームの進行方向に対して直交し、かつ、水平な直線上に不等間隔に配置されており、時刻t=0において、送受信アンテナ4−0が原点に配置されているものとする。受信アンテナ4−1〜4−(N−1)は、時刻t=0において、x軸上のx=d1,d2,・・・,dN-1の位置に配置されているものとする。
【0019】
次に動作について説明する。
まず、送信器1は、基準となるパルス信号を生成し、送受切換器2を介して、そのパルス信号を所定の周期で繰り返し送受信アンテナ4−0に出力することにより、そのパルス信号を目標20に向けて送信する。
ここで、送受信アンテナ4−0の開口長をLt、パルス信号の波長をλとすると、送受信アンテナ4−0の主ビームのnull to nullの幅Δθt[rad]は、下記の式(1)で与えられる。
Δθt=2λ/Lt (1)
【0020】
時刻tにおいて、送受信アンテナ4−0から送信されたパルス信号は、十分遠方の位置(Lx,Ly)に存在する目標20に照射されることにより、その目標20に反射され、受信アレイアンテナ3に到来する。
受信アレイアンテナ3の送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)は、目標20に反射されたパルス信号を受信し、そのパルス信号を受信器5−0,5−1,・・・,5−(N−1)に出力する。
受信器5−0,5−1,・・・,5−(N−1)は、受信アレイアンテナ3により受信されたパルス信号を受けると、そのパルス信号を増幅してA/D変換器6−0,6−1,・・・,6−(N−1)に出力する。
A/D変換器6−0,6−1,・・・,6−(N−1)は、受信器5−0,5−1,・・・,5−(N−1)により増幅されたアナログのパルス信号を受けると、そのパルス信号をディジタルのパルス信号に変換し、ディジタルのパルス信号を記憶部7に格納する。
これにより、記憶部7にはN個のパルス信号が記憶される。
【0021】
レンジ圧縮部8は、記憶部7に記憶されているN個のパルス信号に対するパルス圧縮処理を実施することにより、レンジ分解能を高めた信号、即ち、レンジプロフィールを取得する。
ここで、レンジ圧縮部8により取得されるレンジプロフィールsn(t)は次式で表される。
sn(t)=αexp(−j(4πLx)/(λsinθt))
・exp(j(2πdnsinθt)/λ) (2)
ただし、n=0,1,・・・,N−1、d0=0である。
【0022】
式(2)におけるθtは、時刻tにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角度であり、次式で表される。
θt=tan-1(Lx/(Ly−vt)) (3)
また、αは目標20の散乱強度であり、nは送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)を表すインデックスである。
なお、式(2)は、反射波が平面波で近似できるものとしており、式(2)より、PRI(Pulse Repetition Interval)をΔt秒として、M個のパルス信号が送受信されることにより得られる信号sn,mは、次式のように表される。
sn,m
=sn(mΔt)
=αexp(−j(4πLx)/(λsinθm))
・exp(j(2πdnsinθm)/λ) (4)
ただし、n=0,1,・・・,N−1、d0=0、m=0,1,・・・,M−1である。
【0023】
式(4)において、mはパルス信号の番号を表すインデックスであり、θmはm番目のパルス信号を送信した時刻mΔtにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角度であり、次式で表される。
θm=tan-1(Lx/(Ly−v(m−M/2)Δt)) (5)
なお、式(2)及び式(3)では、1個のパルス信号の送受信に要する時間が、Δtと比べて十分に短いため、1個のパルス信号を送受信する間、なす角θt,θmが一定であるものとして近似している。
【0024】
自機位置情報収集部9は、例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体であるプラットフォームの自機位置、速度及び姿勢を示す自機位置情報を収集する。
対称方向抑圧型合成開口処理部10は、上記のようにして、レンジ圧縮部8がレンジプロフィールを取得すると、自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、レンジ圧縮部8から出力されるレンジプロフィール毎に、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する処理を実施する。
ここでは、対称方向抑圧型合成開口処理部10の動作を具体的に説明する前に、ある所望の方向にビームを向けると同時に、異なる方向の信号を抑圧するビームパターンを形成するための荷重の算出方法について説明する。
【0025】
ビームを向けたい所望の方向θfに対応するステアリングベクトルをa(θf)として、抑圧したい方向θsgに対応するステアリングベクトルをa(θsg)(g=1,2,・・・,G)とする。
ここでは、一般化のため、G個の異なる方向にナルを形成することを考える。これらのステアリングベクトルは次式で表される。なお、以下では、ビームを向けたい所望の方向θfのことをステアリング角と称する。
a(θf)
=[1 exp(j(2πd1sinθf)/λ) ・・・
・・・ exp(j(2πdN-1sinθf)/λ)]T (6)
a(θsg)
=[1 exp(j(2πd1sinθsg)/λ) ・・・
・・・ exp(j(2πdN-1sinθsg)/λ)]T (7)
【0026】
次に、各素子(各受信アンテナにより受信されたパルス信号)に対する荷重wn(n=1,2,・・・,N)をまとめた荷重ベクトルwを次式のように定義する。
w=[w1 w2 ・・・wN]T (8)
そして、ステアリング角方向のゲインを1として、抑圧したい方向θsgのゲインを抑圧するために、次式で定義される二乗誤差σを最小化するような荷重ベクトルwを決定する。
σ=‖y−Aw‖2 (9)
ただし、Aはステアリング角とナルを形成する方向に対応するステアリングベクトルをまとめた(G+1)×Nの行列であり、yは所望のゲインパターンを表す(G+1)次元ベクトルである。
【0027】
なお、ステアリング角θfの方向にピークを持ち、抑圧したい方向θsgにナルが存在する受信ビームパターンを形成するに際して、ベクトルyを下記の式(11)のように設定する。
A=[a(θf) a(θs1) ・・・ a(θsG)]*T (10)
y=[1 ε ・・・ ε]T (ε<<1) (11)
ただし、式(10)における上付きの*は複素共役、上付きのTは行列の転置を表しており、荷重ベクトルwは下記の式(12)に示すように、最小二乗法によって求めることができる。
w=A+y (12)
ただし、上付きの+は疑似逆行列を表している。
【0028】
対称方向抑圧型合成開口処理部10の対称方向抑圧用荷重算出部10aは、プラットフォームの進行方向を対称軸として、十分遠方の位置(Lx,Ly)に存在する目標20と対称な位置(−Lx,Ly)にある点からの反射波を抑圧するため、式(12)を利用して、荷重ベクトルwを算出する。
即ち、m番目の受信パルス信号については、m番目のパルスを送信した時刻mΔtにおいて、送受信アンテナ4−0と位置(Lx,Ly)に存在する目標20とを結ぶ直線と、y軸がなす角θmの方向をステアリング角として、そのθmの方向と対称な−θmの方向の信号を抑圧するような荷重ベクトルwを算出するため、下記の式(13)(14)で表されるなす角θm,−θmに対応するステアリングベクトルa(θm),a(−θm)を算出する。
【0029】
a(θm)
=[1 exp(j(2πd1sinθm)/λ) ・・・
・・・ exp(j(2πdN-1sinθm)/λ)]T (13)
a(−θm)
=[1 exp(−j(2πd1sinθm)/λ) ・・・
・・・ exp(−j(2πdN-1sinθm)/λ)]T (14)
【0030】
対称方向抑圧用荷重算出部10aは、なす角θm,−θmに対応するステアリングベクトルa(θm),a(−θm)を算出すると、なす角θmの方向のゲインを1として、なす角−θmの方向の信号を抑圧する荷重ベクトルw(θm)を下記の式(15)のように算出する。
w(θm)=A+y (15)
ただし、Aは所望の方向とナルを形成する方向のステアリングベクトルをまとめた2×Nの行列であり、yは所望のゲインパターンを表す2次元ベクトルである.
A=[a(θm) a(−θm)]*T (16)
y=[1 ε]T (ε<<1) (17)
【0031】
対称方向抑圧型位相補償・積分処理部10bは、対称方向抑圧用荷重算出部10aがなす角−θmの方向を抑圧する荷重ベクトルw(θm)を算出すると、下記の式(18)に示すように、その荷重ベクトルw(θm)をm番目の受信パルス信号smに乗算することにより、なす角−θmの方向の信号を抑圧する受信ビームパターンを形成する。信号zmは受信ビームパターンに相当する。
zm=w(θm)*Tsm (18)
ただし、smはレンジ圧縮部8から出力されたレンジプロフィール、即ち、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されたのち、レンジ圧縮部8によりレンジ圧縮処理されたパルス信号s0,m,s1,m,・・・,sN-1,mをまとめて、次式のようなベクトル形式で表現されたパルス信号のベクトルである。
【数1】

【0032】
ここでは、対称方向抑圧用荷重算出部10aがm番目の受信パルス信号smに対する荷重ベクトルw(θm)を算出し、対称方向抑圧型位相補償・積分処理部10bがm番目の受信パルス信号smに対する受信ビームパターンを形成するものについて示したが、実際には、対称方向抑圧用荷重算出部10aは、最終的に出力するレーダ画像のアジマス方向のサンプル位置kに対応する目標20の位置を(Lx,k,Ly,k)、時刻t=mΔtにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角をθk,m(k=0,1,・・・,K−1;m=0,1,・・・,M−1)として、パルス信号毎にK個の荷重ベクトルwk,m=w(θk,m)を算出する。
wk,m=w(θk,m)=Ak+y (20)
Ak=[a(θk,m) a(−θk,m)]*T (21)
θk,m=tan-1(Lx,k/(Ly,k−v(m−M/2)Δt))
(22)
【0033】
なお、図3の例では、プラットフォームの進行方向がy軸の正の向きであり、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)がプラットフォームの進行方向と直交するx軸上に配置されているものを示しているが、プラットフォームの進行方向が常に送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)を配置している直線と直交する方向であるとは限らず、斜めに進行する場合がある。
この場合、プラットフォームの進行方向を対称軸にして、目標20が存在する方向と対称な方向の信号を抑圧するための荷重ベクトルwを算出するには、自機位置情報収集部9により収集された自機位置情報を参照してプラットフォームの進行方向を把握し、そのプラットフォームの進行方向と、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)が配置された直線とのなす角度を計算して抑圧方向を決定すればよい。
【0034】
対称方向抑圧型合成開口処理部10の対称方向抑圧型位相補償・積分処理部10bは、上記のようにして、パルス信号毎にK個の荷重ベクトルwk,m=w(θk,m)を算出すると、その荷重ベクトルwk,mを受信パルス信号smに乗算することにより、なす角−θk,mの方向の信号を抑圧する受信ビームパターンを形成する。
この際、プラットフォームの移動により生じるパルス信号の位相変化を補償するため、下記の式(23)に示すように、荷重ベクトルwk,mに位相変化を補償するための参照関数rk,mを乗算するようにしている。信号z(k)は受信ビームパターンに相当する。
【数2】
rk,m=exp(j(4πLx,k)/(λsinθk,m)) (24)
ただし、k=0,1,・・・,K−1である。
【0035】
対称方向抑圧型位相補償・積分処理部10bは、なす角−θk,mの方向の信号を抑圧する受信ビームパターンを形成すると、その受信ビームパターンに相当する信号z(k)をコヒーレント積分してレーダ画像を生成する。
表示部11は、対称方向抑圧型合成開口処理部10の対称方向抑圧型位相補償・積分処理部10bがレーダ画像を生成すると、そのレーダ画像をプラットフォームの進行方向正面のレーダ画像として表示する。
【0036】
以上で明らかなように、この実施の形態1によれば、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成し、その受信ビームパターンに対する合成開口処理を実施するように構成したので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができる効果を奏する。
また、この実施の形態1によれば、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分するように構成したので、プラットフォームの移動に伴うレーダ画像の劣化を防止することができる効果を奏する。
【0037】
なお、この実施の形態1では、レーダ装置が搭載される移動体が航空機であるものについて示したが、移動体は航空機に限るものではなく、自動車などのあらゆる移動体に搭載することができる。
また、この実施の形態1では、受信アレイアンテナ3の開口面が移動体の進行方向を向いているものについて示したが、他の方向を向いている場合についても容易に拡張することができることは言うまでもない。
【0038】
実施の形態2.
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
アレイ処理部21は方向固定型対称方向抑圧用荷重算出部21a及びビーム合成部21bから構成され、予め設定された固定方向にナルが存在する受信ビームパターンをH個形成する処理を実施する。なお、アレイ処理部21は受信ビームパターン形成手段を構成している。
方向固定型対称方向抑圧用荷重算出部21aは予め設定された固定方向にナルを形成するための荷重ベクトルをH個算出する処理を実施する。
ビーム合成部21bは方向固定型対称方向抑圧用荷重算出部21aにより算出されたH個の荷重ベクトルをレンジ圧縮部8から出力されたレンジプロフィールに乗算して、H個の受信ビームパターンを形成する処理を実施する。
【0039】
合成開口処理部22はアレイ処理部21により形成されたH個の受信ビームパターンの中から、受信アレイアンテナ3により受信されたパルス信号に対応する受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施する。なお、合成開口処理部22は合成開口処理手段を構成している。
ビーム選択部22aはアレイ処理部21により形成されたH個の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを選択する処理を実施する。
動き補償部22bはプラットフォームの移動により生じるパルス信号の位相変化を補償する処理を実施する。
コヒーレント積分部22cは動き補償部22bによる位相補償後のパルス信号をコヒーレント積分してレーダ画像を生成する。
【0040】
上記実施の形態1では、式(23)にしたがって対称方向の信号を抑圧すると同時に、合成開口処理を実施してアジマス方向の分解能を高めるものについて示したが、上記実施の形態1では、アジマス方向のサンプル位置kとパルス番号mのそれぞれに対して、ビーム形成を行うため、合計K×M回のビーム形成処理が必要となり、演算量が増大する。
しかし、実際にはパルス信号毎に、厳密に対称方向である−θk,mの方向にナルを向ける必要はなく、−θk,mの方向の近傍にナルがあって、−θk,mの方向の信号が十分に抑圧されればよい。
そこで、この実施の形態2では、H個の受信ビームパターンを形成した後、パルス信号毎に、−θk,mの方向の信号が十分に抑圧されている受信ビームパターンを1つ選択し、その受信ビームパターンに対する合成開口処理を実施するようにしている。
この場合、受信ビームパターンの形成数であるHを、ビーム形成処理回数であるK×Mよりも十分小さい値にすることが可能であるため、上記実施の形態1よりも、ビーム形成処理回数を大幅に削減して、演算量を軽減することができる。
【0041】
以下、具体的に説明する。
アレイ処理部21の方向固定型対称方向抑圧用荷重算出部21aは、予め設定された固定方向(抑圧したい対称方向)にナルを形成するための荷重ベクトルwh=w(θh)(h=0,1,・・・,H−1)をH個算出する。
wh=w(θh)=Ah+y (25)
Ah=[a(θh) a(−θh)]*T (26)
ただし、θhは画像化する範囲内において、事前に定義されたH個の異なる方位を示している。
【0042】
アレイ処理部21のビーム合成部21bは、方向固定型対称方向抑圧用荷重算出部21aがH個の荷重ベクトルwhを算出すると、下記の式(27)に示すように、レンジ圧縮部8から出力されたレンジプロフィール、即ち、レンジ圧縮部8によりレンジ圧縮処理されたパルス信号smにH個の荷重ベクトルwhを乗算して、H個の受信ビームパターンを形成する処理を実施する。なお、信号zh,mは受信ビームパターンに相当する。
zh,m=wh*Tsm (27)
h=0,1,・・・,H−1
【0043】
合成開口処理部22のビーム選択部22aは、ビーム合成部21bがH個の受信ビームパターンを形成すると、H個の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを1つ選択する。
即ち、下記の式(28)を計算することにより、−θk,mの方向の信号が十分に抑圧されている受信ビームパターンのビーム番号hk,mを求め、そのビーム番号hk,mに対応する受信ビームパターンを選択する。ただし、式(28)の内積演算は事前に実施して、θk,mの値に対応するビーム番号hk,mをテーブル化し、そのテーブルを参照してθk,mの値に対応するビーム番号hk,mを選択するようにしてもよい。
【数3】
【0044】
合成開口処理部22の動き補償部22bは、上記のようにして、ビーム選択部22aが受信ビームパターンを選択すると、下記の式(29)に示すように、プラットフォームの移動により生じるパルス信号の位相変化を補償するため、ビーム合成部21bから出力された信号zh,mのうち、ビーム選択部22aによって選択されたビーム番号h=hk,mの信号に、式(24)で表される参照関数rk,mを乗算する処理を実施する。
zk,m=rk,mz(hk,m),m (29)
【0045】
合成開口処理部22のコヒーレント積分部22cは、動き補償部22bがプラットフォームの移動により生じるパルス信号の位相変化を補償すると、下記の式(30)に示すように、位相補償後のパルス信号zk,mをコヒーレント積分して、アジマス方向の分解能が高い信号z(k)を算出する。
【数4】
ただし、k=0,1,・・・,K−1である。
【0046】
以上で明らかなように、この実施の形態2によれば、予め設定された固定方向にナルが存在する受信ビームパターンをH個形成し、H個の受信ビームパターンの中から、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施するように構成したので、左右対称方向の抑圧性能については上記実施の形態1のレーダ装置とほぼ同等の性能を維持したまま、演算量を削減することができる効果を奏する。
【図面の簡単な説明】
【0047】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】この発明の実施の形態1によるレーダ装置の対称方向抑圧型合成開口処理部を示す構成図である。
【図3】この発明の実施の形態1によるレーダ装置における送受信アンテナ及び受信アンテナの配置と、プラットフォームの移動を説明する説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【符号の説明】
【0048】
1 送信器(送信手段)、2 送受切換器(送信手段)、3 受信アレイアンテナ(受信手段)、4−0 送受信アンテナ(送信手段)、4−1〜4−(N−1) 受信アンテナ、5−0,5−1,・・・,5−(N−1) 受信器(受信手段)、6−0,6−1,・・・,6−(N−1) A/D変換器(受信手段)、7 記憶部(受信手段)、
8 レンジ圧縮部(受信手段)、9 自機位置情報収集部(受信ビームパターン形成手段、合成開口処理手段)、10 対称方向抑圧型合成開口処理部(受信ビームパターン形成手段、合成開口処理手段)、10a 対称方向抑圧用荷重算出部、10b 対称方向抑圧型位相補償・積分処理部、11 表示部、20 目標、21 アレイ処理部(受信ビームパターン形成手段)、21a 方向固定型対称方向抑圧用荷重算出部、21b ビーム合成部、22 合成開口処理部(合成開口処理手段)、22a ビーム選択部、22b 動き補償部、22c コヒーレント積分部。
【技術分野】
【0001】
この発明は、距離(レンジ)方向と方位(アジマス)方向に高い分解能を有するレーダ装置に関するものである。
【背景技術】
【0002】
レーダ装置は、例えば、航空機や自動車などの移動体に搭載され、その移動体の進行方向の正面のレーダ画像を生成する技術を実装している。
レーダの波長は、光と比べて長いため、霧などの悪視界環境下においても、遠方の画像を生成することができる利点がある。
したがって、レーダ装置を例えば航空機に搭載すれば、進行方向の視界が悪い環境でも、移動体の進行方向の正面の画像を正確に生成して、航空機の着陸支援などに寄与することができる。
【0003】
従来の画像レーダ技術としては、合成開口レーダ(SAR:Synthetic Aperture Radar)やドップラービームシャープニング(DBS:Doppler Beam Sharpening)などが知られている(例えば、非特許文献1参照)。
しかし、これらの画像レーダ技術は、いずれも移動体の進行方向の横、あるいは、斜め前方を画像化することができるが、正面を画像化することができない。
その理由は、これらの画像レーダ技術は、本質的にプラットフォームの移動を利用して、仮想的にプラットフォームの進行方向に広がる大きなアレイアンテナを構成することによって、移動体の進行方向に平行な方向の分解能を稼ぐ手法だからである。
したがって、SARやDBSの処理を実施して、移動体の進行方向を画像化すると、真正面方向については、十分な分解能を得ることができない。
【0004】
そこで、移動体の真正面方向について、十分な分解能を得ることができるようにするためには、実開口長の大きなアレイアンテナを用いる方法が考えられる。
例えば、プラットフォームが航空機である場合、その航空機の主翼にアンテナを並べれば、両翼端の幅に相当する長さのアレイアンテナを構成することができるため、実開口長を大きくすることができる。
具体的には、例えば、正面方向のX帯のレーダ画像を生成することを考えると、両翼端の幅が10m、波長が3cmであれば、角度分解能が3mrad程度の画像を得ることができる。
しかし、グレーティングローブの発生を防止するために、半波長(1.5cm)間隔で素子アンテナを配置すると、素子アンテナが666個必要になり、多数の素子アンテナを主翼に配置する必要がある。
【0005】
素子アンテナの配置数を削減する技術として、送信用アレイアンテナと受信用アレイアンテナを個別に備えることにより、素子アンテナの数を削減すると同時に、グレーティングローブの発生を抑圧する方式が知られている(例えば、特許文献1参照)。
この方式では、送信用アレイアンテナと受信用アレイアンテナの素子間隔を半波長よりも広げることで、素子アンテナの本数を削減している。
また、送信用アレイアンテナの素子間隔と、受信用アレイアンテナの素子間隔とが異なるように配置することで、送信のアンテナパターン(以下、送信パターンと称する)に生じるグレーティングローブと、受信のアンテナパターン(以下、受信パターンと称する)に生じるグレーティングローブの間隔が一致しないようにして、送受信全体としてのパターン(以下、送受信パターンと称する)に生じるグレーティングローブを抑圧している。
さらに、送信パターンと受信パターンを同期させて走査することにより、領域を走査して観測するものである。
【0006】
また、SARやDBSの処理を実施して、移動体の進行方向を画像化すると、その画像は、移動体の進行方向を対称軸として、左右対称に折り返してしまう問題が発生する。
その理由は、移動体であるプラットフォームから左右対称な2点までの距離が常に等しいため、左右対称な2点からの反射信号の位相変化が完全に一致するからである。
この問題の解決策としては、モノパルスアンテナを利用して、Σチャネルにおける正面方向のSAR画像又はDBS画像を生成するとともに、Δチャネルにおける正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合して、左右対称の折り返しを抑圧する方式が知られている(例えば、特許文献2参照)。
この方式では、分解能が合成開口長によって決まるため、真正面については充分な分解能が得られないが、左右のアンビギュイティを抑圧することが可能である。しかし、アンテナパターンの計測誤差が、得られる画質に強く影響を与えることになる。
【0007】
この他にも、左右対称に折り返してしまう問題の解決策として、複数の受信アンテナを進行方向と直交する方向にアレイ状に配置し、複数の受信アンテナにより受信された信号を用いて、それぞれ正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合して、左右対称の折り返しを抑圧する方式が知られている(例えば、非特許文献2参照)。
しかし、各受信アンテナの位相中心の位置が移動体の進行方向に対して直交する方向にずれているため、各受信アンテナにより受信された信号を用いて、正面方向のSAR画像又はDBS画像を生成すると、これらの画像における折り返しの軸もずれている。
そのため、これらの画像の線形結合から得られる画像においては、左右の折り返しの電力抑圧比が高々アンテナ数の2乗となり、高い抑圧比を得るためには、受信アンテナ数を増加する必要がある。
【0008】
【特許文献1】米国特許第3,825,928号明細書 “High Resolution Bistatic Rader System”
【特許文献2】米国特許第4,978,961号明細書 “Synthetic Aperture Radar With Dead−Ahead Beam Sharpening Capability”
【非特許文献1】D.R.Wehner,“High−Resolution Radar Second Edition,”Artech House Inc,1995
【非特許文献2】長波長ホログラフィを用いた前方監視レーダの像再生法(電子情報通信学会論文誌 B−II Vol.J76−B−II,No.8,pp698−705,1993年8月)
【発明の開示】
【発明が解決しようとする課題】
【0009】
従来のレーダ装置は以上のように構成されているので、複数の受信アンテナを進行方向と直交する方向にアレイ状に配置し、複数の受信アンテナにより受信された信号を用いて、それぞれ正面方向のSAR画像又はDBS画像を生成し、これらの画像を線形結合すれば、左右対称の折り返しを抑圧することができる。しかし、各受信アンテナの位相中心の位置が移動体の進行方向に対して直交する方向にずれているため、各受信アンテナにより受信された信号を用いて、正面方向のSAR画像又はDBS画像を生成すると、これらの画像における折り返しの軸もずれてしまう。そのため、これらの画像の線形結合から得られる画像においては、左右の折り返しの電力抑圧比が高々アンテナ数の2乗となり、高い抑圧比を得るためには、受信アンテナ数を増加する必要がある課題があった。
【0010】
この発明は上記のような課題を解決するためになされたもので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができるレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0011】
この発明に係るレーダ装置は、受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段を設け、その受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施するようにしたものである。
【発明の効果】
【0012】
この発明によれば、受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段を設け、その受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施するように構成したので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができる効果がある。
【発明を実施するための最良の形態】
【0013】
実施の形態1.
図1はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、送信器1は基準となるパルス信号を生成し、そのパルス信号を繰り返し送受切換器2に出力する処理を実施する。
送受切換器2は送信器1からパルス信号を受けると、そのパルス信号を送受信アンテナ4−0に出力する一方、送受信アンテナ4−0からパルス信号を受けると、そのパルス信号を受信器5−0に出力する処理を実施する。
受信アレイアンテナ3は送受信アンテナ4−0とN−1個の受信アンテナ4−1〜4−(N−1)から構成されているアレイアンテナである。
送受信アンテナ4−0は開口長がLtのアンテナであり、送受切換器2から出力されたパルス信号を目標20に向けて照射する一方、その目標20に反射されたパルス信号を受信する機能を備えている。なお、送信器1、送受切換器2、送受信アンテナ4−0から送信手段が構成されている。
【0014】
N−1個の素子アンテナである受信アンテナ4−1〜4−(N−1)はプラットフォーム(レーダ装置が搭載されている移動体)の進行方向に対して直交し、かつ、水平な方向に広がるように不等間隔で配置されており、目標20に反射されたパルス信号を受信する機能を備えている。
この実施の形態1では、受信アレイアンテナ3を構成する送受信アンテナ4−0がパルス信号の送信用と受信用を兼ねているものについて示しているが、その送受信アンテナ4−0を受信専用にして、別途、パルス信号を送信する送信アンテナを設けてもよい。
また、この実施の形態1では、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)の素子間隔が不等間隔であるものについて説明するが、素子間隔が必ずしも不等間隔である必要はない。
また、この実施の形態1では、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)の配列が直線状であるものについて説明するが、その配列が直線状でない場合や、その配列が2次元配列であってもよく、同様に適用することができる。
また、適当な通信手段を備えていれば、同一又は異なるプラットフォームに搭載された他のレーダ装置の送受信アンテナを使用することができる。
【0015】
受信器5−0,5−1,・・・,5−(N−1)は受信アレイアンテナ3の送受信アンテナ4−0又は受信アンテナ4−1〜4−(N−1)と接続され、送受信アンテナ4−0又は受信アンテナ4−1〜4−(N−1)により受信されたパルス信号を増幅する処理を実施する。
A/D変換器6−0,6−1,・・・,6−(N−1)は受信器5−0,5−1,・・・,5−(N−1)により増幅されたアナログのパルス信号をディジタルのパルス信号に変換する処理を実施する。
記憶部7はA/D変換器6−0,6−1,・・・,6−(N−1)によりA/D変換されたパルス信号を一時的に格納するメモリである。
レンジ圧縮部8は記憶部7に記憶されているパルス信号に対するパルス圧縮処理を実施して、レンジ分解能を高めた信号(以下、「レンジプロフィール」という)を取得する処理を実施する。
なお、受信アレイアンテナ3、受信器5−0,5−1,・・・,5−(N−1)、A/D変換器6−0,6−1,・・・,6−(N−1)、記憶部7及びレンジ圧縮部8から受信手段が構成されている。
【0016】
自機位置情報収集部9は例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体であるプラットフォームの自機位置、速度及び姿勢を示す自機位置情報を収集する機能を備えている。
対称方向抑圧型合成開口処理部10は自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、レンジ圧縮部8から出力されるレンジプロフィール毎に、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成して、その受信ビームパターンに対する合成開口処理を実施する処理を実施する。
なお、自機位置情報収集部9及び対称方向抑圧型合成開口処理部10から受信ビームパターン形成手段が構成され、自機位置情報収集部9及び対称方向抑圧型合成開口処理部10から合成開口処理手段が構成されている。
表示部11は対称方向抑圧型合成開口処理部10の合成開口処理により生成されたレーダ画像を表示する処理を実施する。
【0017】
図2はこの発明の実施の形態1によるレーダ装置の対称方向抑圧型合成開口処理部10を示す構成図であり、対称方向抑圧用荷重算出部10aは自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルを形成するための荷重ベクトルを算出する処理を実施する。
対称方向抑圧型位相補償・積分処理部10bは対称方向抑圧用荷重算出部10aにより算出された荷重ベクトルをレンジ圧縮部8から出力されるレンジプロフィールに乗算して、その対称な方向にナルが存在する受信ビームパターンを形成するとともに、その受信ビームパターンに対する合成開口処理、即ち、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号(レンジプロフィール)をコヒーレント積分する合成開口処理を実施してレーダ画像を生成する。
【0018】
図3はこの発明の実施の形態1によるレーダ装置における送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)の配置と、プラットフォームの移動を説明する説明図である。
図3では、x座標軸がプラットフォームの進行方向と垂直な方向(図中、水平な方向)に取られ、y座標軸がプラットフォームの進行方向と平行な方向に取られている。
プラットフォームは、y軸の正の方向に速度vで等速度運動するものとする。
また、送受信アンテナ4−0と、N−1個の受信アンテナ4−1〜4−(N−1)はプラットフォームの進行方向に対して直交し、かつ、水平な直線上に不等間隔に配置されており、時刻t=0において、送受信アンテナ4−0が原点に配置されているものとする。受信アンテナ4−1〜4−(N−1)は、時刻t=0において、x軸上のx=d1,d2,・・・,dN-1の位置に配置されているものとする。
【0019】
次に動作について説明する。
まず、送信器1は、基準となるパルス信号を生成し、送受切換器2を介して、そのパルス信号を所定の周期で繰り返し送受信アンテナ4−0に出力することにより、そのパルス信号を目標20に向けて送信する。
ここで、送受信アンテナ4−0の開口長をLt、パルス信号の波長をλとすると、送受信アンテナ4−0の主ビームのnull to nullの幅Δθt[rad]は、下記の式(1)で与えられる。
Δθt=2λ/Lt (1)
【0020】
時刻tにおいて、送受信アンテナ4−0から送信されたパルス信号は、十分遠方の位置(Lx,Ly)に存在する目標20に照射されることにより、その目標20に反射され、受信アレイアンテナ3に到来する。
受信アレイアンテナ3の送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)は、目標20に反射されたパルス信号を受信し、そのパルス信号を受信器5−0,5−1,・・・,5−(N−1)に出力する。
受信器5−0,5−1,・・・,5−(N−1)は、受信アレイアンテナ3により受信されたパルス信号を受けると、そのパルス信号を増幅してA/D変換器6−0,6−1,・・・,6−(N−1)に出力する。
A/D変換器6−0,6−1,・・・,6−(N−1)は、受信器5−0,5−1,・・・,5−(N−1)により増幅されたアナログのパルス信号を受けると、そのパルス信号をディジタルのパルス信号に変換し、ディジタルのパルス信号を記憶部7に格納する。
これにより、記憶部7にはN個のパルス信号が記憶される。
【0021】
レンジ圧縮部8は、記憶部7に記憶されているN個のパルス信号に対するパルス圧縮処理を実施することにより、レンジ分解能を高めた信号、即ち、レンジプロフィールを取得する。
ここで、レンジ圧縮部8により取得されるレンジプロフィールsn(t)は次式で表される。
sn(t)=αexp(−j(4πLx)/(λsinθt))
・exp(j(2πdnsinθt)/λ) (2)
ただし、n=0,1,・・・,N−1、d0=0である。
【0022】
式(2)におけるθtは、時刻tにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角度であり、次式で表される。
θt=tan-1(Lx/(Ly−vt)) (3)
また、αは目標20の散乱強度であり、nは送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)を表すインデックスである。
なお、式(2)は、反射波が平面波で近似できるものとしており、式(2)より、PRI(Pulse Repetition Interval)をΔt秒として、M個のパルス信号が送受信されることにより得られる信号sn,mは、次式のように表される。
sn,m
=sn(mΔt)
=αexp(−j(4πLx)/(λsinθm))
・exp(j(2πdnsinθm)/λ) (4)
ただし、n=0,1,・・・,N−1、d0=0、m=0,1,・・・,M−1である。
【0023】
式(4)において、mはパルス信号の番号を表すインデックスであり、θmはm番目のパルス信号を送信した時刻mΔtにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角度であり、次式で表される。
θm=tan-1(Lx/(Ly−v(m−M/2)Δt)) (5)
なお、式(2)及び式(3)では、1個のパルス信号の送受信に要する時間が、Δtと比べて十分に短いため、1個のパルス信号を送受信する間、なす角θt,θmが一定であるものとして近似している。
【0024】
自機位置情報収集部9は、例えば慣性航法装置やGPS受信器を搭載し、レーダ装置が搭載されている移動体であるプラットフォームの自機位置、速度及び姿勢を示す自機位置情報を収集する。
対称方向抑圧型合成開口処理部10は、上記のようにして、レンジ圧縮部8がレンジプロフィールを取得すると、自機位置情報収集部9により収集された位置情報からプラットフォームの進行方向を把握し、レンジ圧縮部8から出力されるレンジプロフィール毎に、そのプラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されるパルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する処理を実施する。
ここでは、対称方向抑圧型合成開口処理部10の動作を具体的に説明する前に、ある所望の方向にビームを向けると同時に、異なる方向の信号を抑圧するビームパターンを形成するための荷重の算出方法について説明する。
【0025】
ビームを向けたい所望の方向θfに対応するステアリングベクトルをa(θf)として、抑圧したい方向θsgに対応するステアリングベクトルをa(θsg)(g=1,2,・・・,G)とする。
ここでは、一般化のため、G個の異なる方向にナルを形成することを考える。これらのステアリングベクトルは次式で表される。なお、以下では、ビームを向けたい所望の方向θfのことをステアリング角と称する。
a(θf)
=[1 exp(j(2πd1sinθf)/λ) ・・・
・・・ exp(j(2πdN-1sinθf)/λ)]T (6)
a(θsg)
=[1 exp(j(2πd1sinθsg)/λ) ・・・
・・・ exp(j(2πdN-1sinθsg)/λ)]T (7)
【0026】
次に、各素子(各受信アンテナにより受信されたパルス信号)に対する荷重wn(n=1,2,・・・,N)をまとめた荷重ベクトルwを次式のように定義する。
w=[w1 w2 ・・・wN]T (8)
そして、ステアリング角方向のゲインを1として、抑圧したい方向θsgのゲインを抑圧するために、次式で定義される二乗誤差σを最小化するような荷重ベクトルwを決定する。
σ=‖y−Aw‖2 (9)
ただし、Aはステアリング角とナルを形成する方向に対応するステアリングベクトルをまとめた(G+1)×Nの行列であり、yは所望のゲインパターンを表す(G+1)次元ベクトルである。
【0027】
なお、ステアリング角θfの方向にピークを持ち、抑圧したい方向θsgにナルが存在する受信ビームパターンを形成するに際して、ベクトルyを下記の式(11)のように設定する。
A=[a(θf) a(θs1) ・・・ a(θsG)]*T (10)
y=[1 ε ・・・ ε]T (ε<<1) (11)
ただし、式(10)における上付きの*は複素共役、上付きのTは行列の転置を表しており、荷重ベクトルwは下記の式(12)に示すように、最小二乗法によって求めることができる。
w=A+y (12)
ただし、上付きの+は疑似逆行列を表している。
【0028】
対称方向抑圧型合成開口処理部10の対称方向抑圧用荷重算出部10aは、プラットフォームの進行方向を対称軸として、十分遠方の位置(Lx,Ly)に存在する目標20と対称な位置(−Lx,Ly)にある点からの反射波を抑圧するため、式(12)を利用して、荷重ベクトルwを算出する。
即ち、m番目の受信パルス信号については、m番目のパルスを送信した時刻mΔtにおいて、送受信アンテナ4−0と位置(Lx,Ly)に存在する目標20とを結ぶ直線と、y軸がなす角θmの方向をステアリング角として、そのθmの方向と対称な−θmの方向の信号を抑圧するような荷重ベクトルwを算出するため、下記の式(13)(14)で表されるなす角θm,−θmに対応するステアリングベクトルa(θm),a(−θm)を算出する。
【0029】
a(θm)
=[1 exp(j(2πd1sinθm)/λ) ・・・
・・・ exp(j(2πdN-1sinθm)/λ)]T (13)
a(−θm)
=[1 exp(−j(2πd1sinθm)/λ) ・・・
・・・ exp(−j(2πdN-1sinθm)/λ)]T (14)
【0030】
対称方向抑圧用荷重算出部10aは、なす角θm,−θmに対応するステアリングベクトルa(θm),a(−θm)を算出すると、なす角θmの方向のゲインを1として、なす角−θmの方向の信号を抑圧する荷重ベクトルw(θm)を下記の式(15)のように算出する。
w(θm)=A+y (15)
ただし、Aは所望の方向とナルを形成する方向のステアリングベクトルをまとめた2×Nの行列であり、yは所望のゲインパターンを表す2次元ベクトルである.
A=[a(θm) a(−θm)]*T (16)
y=[1 ε]T (ε<<1) (17)
【0031】
対称方向抑圧型位相補償・積分処理部10bは、対称方向抑圧用荷重算出部10aがなす角−θmの方向を抑圧する荷重ベクトルw(θm)を算出すると、下記の式(18)に示すように、その荷重ベクトルw(θm)をm番目の受信パルス信号smに乗算することにより、なす角−θmの方向の信号を抑圧する受信ビームパターンを形成する。信号zmは受信ビームパターンに相当する。
zm=w(θm)*Tsm (18)
ただし、smはレンジ圧縮部8から出力されたレンジプロフィール、即ち、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されたのち、レンジ圧縮部8によりレンジ圧縮処理されたパルス信号s0,m,s1,m,・・・,sN-1,mをまとめて、次式のようなベクトル形式で表現されたパルス信号のベクトルである。
【数1】
【0032】
ここでは、対称方向抑圧用荷重算出部10aがm番目の受信パルス信号smに対する荷重ベクトルw(θm)を算出し、対称方向抑圧型位相補償・積分処理部10bがm番目の受信パルス信号smに対する受信ビームパターンを形成するものについて示したが、実際には、対称方向抑圧用荷重算出部10aは、最終的に出力するレーダ画像のアジマス方向のサンプル位置kに対応する目標20の位置を(Lx,k,Ly,k)、時刻t=mΔtにおいて、送受信アンテナ4−0と目標20を結ぶ直線がy軸となす角をθk,m(k=0,1,・・・,K−1;m=0,1,・・・,M−1)として、パルス信号毎にK個の荷重ベクトルwk,m=w(θk,m)を算出する。
wk,m=w(θk,m)=Ak+y (20)
Ak=[a(θk,m) a(−θk,m)]*T (21)
θk,m=tan-1(Lx,k/(Ly,k−v(m−M/2)Δt))
(22)
【0033】
なお、図3の例では、プラットフォームの進行方向がy軸の正の向きであり、送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)がプラットフォームの進行方向と直交するx軸上に配置されているものを示しているが、プラットフォームの進行方向が常に送受信アンテナ4−0と受信アンテナ4−1〜4−(N−1)を配置している直線と直交する方向であるとは限らず、斜めに進行する場合がある。
この場合、プラットフォームの進行方向を対称軸にして、目標20が存在する方向と対称な方向の信号を抑圧するための荷重ベクトルwを算出するには、自機位置情報収集部9により収集された自機位置情報を参照してプラットフォームの進行方向を把握し、そのプラットフォームの進行方向と、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)が配置された直線とのなす角度を計算して抑圧方向を決定すればよい。
【0034】
対称方向抑圧型合成開口処理部10の対称方向抑圧型位相補償・積分処理部10bは、上記のようにして、パルス信号毎にK個の荷重ベクトルwk,m=w(θk,m)を算出すると、その荷重ベクトルwk,mを受信パルス信号smに乗算することにより、なす角−θk,mの方向の信号を抑圧する受信ビームパターンを形成する。
この際、プラットフォームの移動により生じるパルス信号の位相変化を補償するため、下記の式(23)に示すように、荷重ベクトルwk,mに位相変化を補償するための参照関数rk,mを乗算するようにしている。信号z(k)は受信ビームパターンに相当する。
【数2】
rk,m=exp(j(4πLx,k)/(λsinθk,m)) (24)
ただし、k=0,1,・・・,K−1である。
【0035】
対称方向抑圧型位相補償・積分処理部10bは、なす角−θk,mの方向の信号を抑圧する受信ビームパターンを形成すると、その受信ビームパターンに相当する信号z(k)をコヒーレント積分してレーダ画像を生成する。
表示部11は、対称方向抑圧型合成開口処理部10の対称方向抑圧型位相補償・積分処理部10bがレーダ画像を生成すると、そのレーダ画像をプラットフォームの進行方向正面のレーダ画像として表示する。
【0036】
以上で明らかなように、この実施の形態1によれば、送受信アンテナ4−0及び受信アンテナ4−1〜4−(N−1)により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成し、その受信ビームパターンに対する合成開口処理を実施するように構成したので、受信アンテナの本数を増やすことなく、左右対称の折り返しの抑圧比を高めることができる効果を奏する。
また、この実施の形態1によれば、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分するように構成したので、プラットフォームの移動に伴うレーダ画像の劣化を防止することができる効果を奏する。
【0037】
なお、この実施の形態1では、レーダ装置が搭載される移動体が航空機であるものについて示したが、移動体は航空機に限るものではなく、自動車などのあらゆる移動体に搭載することができる。
また、この実施の形態1では、受信アレイアンテナ3の開口面が移動体の進行方向を向いているものについて示したが、他の方向を向いている場合についても容易に拡張することができることは言うまでもない。
【0038】
実施の形態2.
図4はこの発明の実施の形態2によるレーダ装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
アレイ処理部21は方向固定型対称方向抑圧用荷重算出部21a及びビーム合成部21bから構成され、予め設定された固定方向にナルが存在する受信ビームパターンをH個形成する処理を実施する。なお、アレイ処理部21は受信ビームパターン形成手段を構成している。
方向固定型対称方向抑圧用荷重算出部21aは予め設定された固定方向にナルを形成するための荷重ベクトルをH個算出する処理を実施する。
ビーム合成部21bは方向固定型対称方向抑圧用荷重算出部21aにより算出されたH個の荷重ベクトルをレンジ圧縮部8から出力されたレンジプロフィールに乗算して、H個の受信ビームパターンを形成する処理を実施する。
【0039】
合成開口処理部22はアレイ処理部21により形成されたH個の受信ビームパターンの中から、受信アレイアンテナ3により受信されたパルス信号に対応する受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施する。なお、合成開口処理部22は合成開口処理手段を構成している。
ビーム選択部22aはアレイ処理部21により形成されたH個の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを選択する処理を実施する。
動き補償部22bはプラットフォームの移動により生じるパルス信号の位相変化を補償する処理を実施する。
コヒーレント積分部22cは動き補償部22bによる位相補償後のパルス信号をコヒーレント積分してレーダ画像を生成する。
【0040】
上記実施の形態1では、式(23)にしたがって対称方向の信号を抑圧すると同時に、合成開口処理を実施してアジマス方向の分解能を高めるものについて示したが、上記実施の形態1では、アジマス方向のサンプル位置kとパルス番号mのそれぞれに対して、ビーム形成を行うため、合計K×M回のビーム形成処理が必要となり、演算量が増大する。
しかし、実際にはパルス信号毎に、厳密に対称方向である−θk,mの方向にナルを向ける必要はなく、−θk,mの方向の近傍にナルがあって、−θk,mの方向の信号が十分に抑圧されればよい。
そこで、この実施の形態2では、H個の受信ビームパターンを形成した後、パルス信号毎に、−θk,mの方向の信号が十分に抑圧されている受信ビームパターンを1つ選択し、その受信ビームパターンに対する合成開口処理を実施するようにしている。
この場合、受信ビームパターンの形成数であるHを、ビーム形成処理回数であるK×Mよりも十分小さい値にすることが可能であるため、上記実施の形態1よりも、ビーム形成処理回数を大幅に削減して、演算量を軽減することができる。
【0041】
以下、具体的に説明する。
アレイ処理部21の方向固定型対称方向抑圧用荷重算出部21aは、予め設定された固定方向(抑圧したい対称方向)にナルを形成するための荷重ベクトルwh=w(θh)(h=0,1,・・・,H−1)をH個算出する。
wh=w(θh)=Ah+y (25)
Ah=[a(θh) a(−θh)]*T (26)
ただし、θhは画像化する範囲内において、事前に定義されたH個の異なる方位を示している。
【0042】
アレイ処理部21のビーム合成部21bは、方向固定型対称方向抑圧用荷重算出部21aがH個の荷重ベクトルwhを算出すると、下記の式(27)に示すように、レンジ圧縮部8から出力されたレンジプロフィール、即ち、レンジ圧縮部8によりレンジ圧縮処理されたパルス信号smにH個の荷重ベクトルwhを乗算して、H個の受信ビームパターンを形成する処理を実施する。なお、信号zh,mは受信ビームパターンに相当する。
zh,m=wh*Tsm (27)
h=0,1,・・・,H−1
【0043】
合成開口処理部22のビーム選択部22aは、ビーム合成部21bがH個の受信ビームパターンを形成すると、H個の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを1つ選択する。
即ち、下記の式(28)を計算することにより、−θk,mの方向の信号が十分に抑圧されている受信ビームパターンのビーム番号hk,mを求め、そのビーム番号hk,mに対応する受信ビームパターンを選択する。ただし、式(28)の内積演算は事前に実施して、θk,mの値に対応するビーム番号hk,mをテーブル化し、そのテーブルを参照してθk,mの値に対応するビーム番号hk,mを選択するようにしてもよい。
【数3】
【0044】
合成開口処理部22の動き補償部22bは、上記のようにして、ビーム選択部22aが受信ビームパターンを選択すると、下記の式(29)に示すように、プラットフォームの移動により生じるパルス信号の位相変化を補償するため、ビーム合成部21bから出力された信号zh,mのうち、ビーム選択部22aによって選択されたビーム番号h=hk,mの信号に、式(24)で表される参照関数rk,mを乗算する処理を実施する。
zk,m=rk,mz(hk,m),m (29)
【0045】
合成開口処理部22のコヒーレント積分部22cは、動き補償部22bがプラットフォームの移動により生じるパルス信号の位相変化を補償すると、下記の式(30)に示すように、位相補償後のパルス信号zk,mをコヒーレント積分して、アジマス方向の分解能が高い信号z(k)を算出する。
【数4】
ただし、k=0,1,・・・,K−1である。
【0046】
以上で明らかなように、この実施の形態2によれば、予め設定された固定方向にナルが存在する受信ビームパターンをH個形成し、H個の受信ビームパターンの中から、受信アレイアンテナ3により受信されたパルス信号の受信方向と対称な方向にある信号を最も抑圧することが可能な受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施するように構成したので、左右対称方向の抑圧性能については上記実施の形態1のレーダ装置とほぼ同等の性能を維持したまま、演算量を削減することができる効果を奏する。
【図面の簡単な説明】
【0047】
【図1】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図2】この発明の実施の形態1によるレーダ装置の対称方向抑圧型合成開口処理部を示す構成図である。
【図3】この発明の実施の形態1によるレーダ装置における送受信アンテナ及び受信アンテナの配置と、プラットフォームの移動を説明する説明図である。
【図4】この発明の実施の形態2によるレーダ装置を示す構成図である。
【符号の説明】
【0048】
1 送信器(送信手段)、2 送受切換器(送信手段)、3 受信アレイアンテナ(受信手段)、4−0 送受信アンテナ(送信手段)、4−1〜4−(N−1) 受信アンテナ、5−0,5−1,・・・,5−(N−1) 受信器(受信手段)、6−0,6−1,・・・,6−(N−1) A/D変換器(受信手段)、7 記憶部(受信手段)、
8 レンジ圧縮部(受信手段)、9 自機位置情報収集部(受信ビームパターン形成手段、合成開口処理手段)、10 対称方向抑圧型合成開口処理部(受信ビームパターン形成手段、合成開口処理手段)、10a 対称方向抑圧用荷重算出部、10b 対称方向抑圧型位相補償・積分処理部、11 表示部、20 目標、21 アレイ処理部(受信ビームパターン形成手段)、21a 方向固定型対称方向抑圧用荷重算出部、21b ビーム合成部、22 合成開口処理部(合成開口処理手段)、22a ビーム選択部、22b 動き補償部、22c コヒーレント積分部。
【特許請求の範囲】
【請求項1】
パルス信号を目標に向けて繰り返し送信する送信手段と、アレイ状に配置されている複数の素子アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、上記受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段と、上記受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項2】
受信ビームパターン形成手段は、プラットフォームの進行方向を対称軸として、パルス信号の受信方向と対称な方向にナルを形成するための荷重ベクトルを算出し、その荷重ベクトルを当該パルス信号に乗算して、その対称な方向にナルが存在する受信ビームパターンを形成することを特徴とする請求項1記載のレーダ装置。
【請求項3】
合成開口処理手段は、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分することを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
パルス信号を目標に向けて繰り返し送信する送信手段と、アレイ状に配置されている複数の素子アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、予め設定された固定方向にナルが存在する受信ビームパターンを複数形成する受信ビームパターン形成手段と、上記受信ビームパターン形成手段により形成された複数の受信ビームパターンの中から、上記受信手段により受信されたパルス信号に対応する受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項5】
受信ビームパターン形成手段は、予め設定された固定方向にナルを形成するための荷重ベクトルを複数算出し、複数の荷重ベクトルを受信手段により受信されたパルス信号に乗算して、固定方向にナルが存在する受信ビームパターンを複数形成することを特徴とする請求項4記載のレーダ装置。
【請求項6】
合成開口処理手段は、受信ビームパターン形成手段により形成された複数の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、パルス信号の受信方向と対称な方向にある信号を最も抑圧する受信ビームパターンを選択することを特徴とする請求項4または請求項5記載のレーダ装置。
【請求項7】
合成開口処理手段は、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分することを特徴とする請求項4から請求項6のうちのいずれか1項記載のレーダ装置。
【請求項1】
パルス信号を目標に向けて繰り返し送信する送信手段と、アレイ状に配置されている複数の素子アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、上記受信手段により受信されるパルス信号毎に、プラットフォームの進行方向を対称軸として、当該パルス信号の受信方向と対称な方向にナルが存在する受信ビームパターンを形成する受信ビームパターン形成手段と、上記受信ビームパターン形成手段により形成された受信ビームパターンに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項2】
受信ビームパターン形成手段は、プラットフォームの進行方向を対称軸として、パルス信号の受信方向と対称な方向にナルを形成するための荷重ベクトルを算出し、その荷重ベクトルを当該パルス信号に乗算して、その対称な方向にナルが存在する受信ビームパターンを形成することを特徴とする請求項1記載のレーダ装置。
【請求項3】
合成開口処理手段は、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分することを特徴とする請求項1または請求項2記載のレーダ装置。
【請求項4】
パルス信号を目標に向けて繰り返し送信する送信手段と、アレイ状に配置されている複数の素子アンテナを用いて、上記目標に反射されたパルス信号を繰り返し受信する受信手段と、予め設定された固定方向にナルが存在する受信ビームパターンを複数形成する受信ビームパターン形成手段と、上記受信ビームパターン形成手段により形成された複数の受信ビームパターンの中から、上記受信手段により受信されたパルス信号に対応する受信ビームパターンを選択し、その受信ビームパターンに対する合成開口処理を実施する合成開口処理手段とを備えたレーダ装置。
【請求項5】
受信ビームパターン形成手段は、予め設定された固定方向にナルを形成するための荷重ベクトルを複数算出し、複数の荷重ベクトルを受信手段により受信されたパルス信号に乗算して、固定方向にナルが存在する受信ビームパターンを複数形成することを特徴とする請求項4記載のレーダ装置。
【請求項6】
合成開口処理手段は、受信ビームパターン形成手段により形成された複数の受信ビームパターンの中から、プラットフォームの進行方向を対称軸として、パルス信号の受信方向と対称な方向にある信号を最も抑圧する受信ビームパターンを選択することを特徴とする請求項4または請求項5記載のレーダ装置。
【請求項7】
合成開口処理手段は、プラットフォームの移動により生じるパルス信号の位相変化を補償し、位相補償後のパルス信号をコヒーレント積分することを特徴とする請求項4から請求項6のうちのいずれか1項記載のレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−242711(P2006−242711A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−57767(P2005−57767)
【出願日】平成17年3月2日(2005.3.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年3月2日(2005.3.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]