
レーダ装置
【課題】 リアルタイム処理を保証しつつ、目標の探知および追尾を継続するレーダ装置を得る。
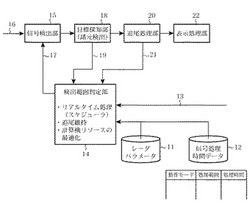
【解決手段】 検出範囲判定部14では、予めデータテーブルとして記憶された信号処理時間データ12、CPUより逐次入力されるCPU負荷率13、目標探知18から発生されるS/N比19、および追尾処理部20によって求められる追尾品質21に基づいて、予めデータテーブルとして記憶されたレーダパラメータ11の組み合わせの中から、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を一組選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【解決手段】 検出範囲判定部14では、予めデータテーブルとして記憶された信号処理時間データ12、CPUより逐次入力されるCPU負荷率13、目標探知18から発生されるS/N比19、および追尾処理部20によって求められる追尾品質21に基づいて、予めデータテーブルとして記憶されたレーダパラメータ11の組み合わせの中から、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を一組選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、航空機等のプラットフォームに搭載され、電波を用いて目標との相対距離および相対速度を継続して検出し、目標の探知、捕捉および追尾を行うレーダ装置に関するものである。
【背景技術】
【0002】
航空機等のプラットフォームに搭載され、目標に対する相対距離および相対速度を検出するレーダ装置には、パルス・レーダおよびパルスドップラ・レーダ等がある。これらレーダ装置は、パルス変調されたレーダ波の送受信を行い、目標を検出しているが、パルス幅およびパルス繰り返し間隔等のレーダパラメータは、予め選定したものを使用している(例えば、特許文献1参照)。
【0003】
【特許文献1】特許第3409746号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のレーダ装置は以上のように構成されているので、航空機等のプラットフォームでは、そのプラットフォームの機体内に搭載可能な容積および質量、また、使用可能な電源容量が限られているため、レーダ装置においてデジタル信号処理を行う信号処理部として搭載可能なCPU数等に制限があり、したがって、信号処理能力にも制限がある。一方、目標の探知および追尾を継続するためには、レーダ信号処理をリアルタイム化する必要がある。この時、パルス幅およびパルス繰り返し間隔等のレーダパラメータは、予めレーダモード毎に選定された値であるが、このレーダパラメータに対応した処理を、受信信号の全ての領域に対して実施するので、処理時間がたくさん必要となり、CPU負荷率によってはリアルタイム処理を保証しきれないことがあるなどの課題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、リアルタイム処理を保証しつつ、目標の探知および追尾を継続するレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、当該レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを信号検出部に選定する検出範囲判定部を備えたものである。
【発明の効果】
【0007】
以上のように、この発明によれば、検出範囲判定部において、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを信号検出部に選定するように構成したので、例えば、CPU負荷率が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
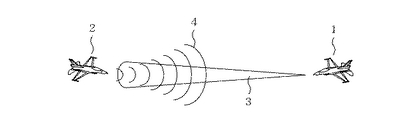
図1はこの発明の実施の形態1によるレーダ装置による目標検出状況を示す説明図であり、図において、自機1は、この発明のレーダ装置が搭載され、目標2に対してレーダ波3を送信し、目標2で反射されたレーダ反射波4から、そのレーダ装置で目標までの相対距離および目標との相対速度を検出するものである。
【0009】
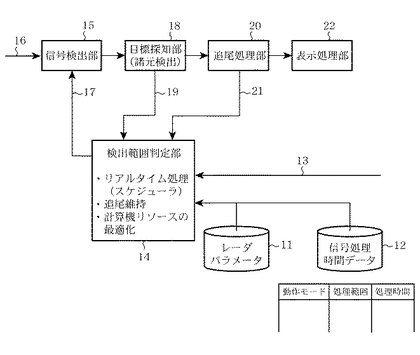
図2はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、レーダパラメータ11は、パルス幅およびパルス繰り返し間隔等からなるものであり、データテーブルとして複数組のレーダパラメータが予め記憶されたものである。この実施の形態1によるレーダ装置では、このレーダパラメータ11から一組のレーダパラメータ17を選定し、そのレーダパラメータ17に基づいたレーダ波3を生成して送信すると共に、目標2で反射したレーダ反射波4をそのレーダパラメータ17に基づいて信号処理し、レーダ反射波4の信号検出を行うものである。
信号処理時間データ(データ記憶部)12は、データテーブルとして予め記憶されたものである。例えば、図2におけるデータテーブルに示すように、レーダ装置の動作モード、目標との相対距離および相対速度からなる目標検出処理を行う処理範囲、および動作モードおよび処理範囲の組み合わせに対して処理に必要な処理時間からなるものである。なお、図2に示したデータテーブルは、信号処理時間データ12のデータテーブルのうちの一部であり、詳しくは実施の形態2から実施の形態5で述べる。
CPU負荷率13は、システム全体が持つCPU処理能力に対する、図2における各種構成の動作に応じて使用されている現在の処理負荷の割合であり、この実施の形態1では、現在のCPU負荷率13が逐次入力されるものとする。
【0010】
検出範囲判定部14は、レーダパラメータ11、信号処理時間データ12、CPU負荷率13、後述するS/N比19および追尾品質21等に基づいて、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を選定するものである。
信号検出部15は、目標2で反射したレーダ反射波4に応じた受信信号16を検出判定部14により選定されたレーダパラメータ17に基づいて信号処理することにより、目標2に相当する信号の検出を行うものである。
目標探知部18は、検出された目標2に相当する信号に応じて目標探知を行うと共に、それら信号および雑音に応じたS/N比(検出誤差)19を発生するものである。
追尾処理部20は、目標探知された信号に応じて目標2の追尾処理を行うと共に、追尾品質21を発生するものである。
表示処理部22は、目標2の探知および追尾状況を表示するものである。
【0011】
次に動作について説明する。
図1において、自機1のレーダ装置では、目標2に対してレーダ波3を送信すると共に、目標2で反射されたレーダ反射波4を受信する。
図2において、信号検出部15では、そのレーダ反射波4に応じた高周波信号である受信信号16を中間周波数まで周波数変換し、予め選定されたレーダパラメータ17に基づいて帯域通過フィルタ処理し、さらに、アナログ・デジタル変換し、高速フーリェ変換して目標2に相当する信号の検出を行う。目標探知18では、検出された目標2に相当する信号に応じて、レーダ波3とレーダ反射波4との時間差から相対距離、ドップラ偏移から相対速度を検出し、目標探知を行うと共に、それら信号および雑音に応じたS/N比19を発生する。
追尾処理部20では、目標探知された信号の時間上の履歴を用い、目標航跡を継続して追尾すると共に、航跡が目標2である確からしさの指標として追尾品質21を求める。表示処理部22では、目標2の追尾状況を表示する。
【0012】
以上のような、レーダ装置において、目標の探知および追尾を継続するには、レーダ信号処理のリアルタイム処理を保証しなくてはならない。
一方、レーダ装置において、選定されるレーダパラメータ17に応じて、CPUによる処理負荷、追尾品質、および最大探知距離等が増減する。例えば、観測可能な目標2との相対距離の最大値(最大探知距離)は、受信信号16の観測時間(=2×観測可能な最大距離/光速)によるが、観測時間が長くなれば信号処理するデータが増え、CPU処理負荷が高く、また、信号処理時間が長くなる。
そこで、検出範囲判定部14では、予めデータテーブルとして記憶された信号処理時間データ12、CPUより逐次入力されるCPU負荷率13、目標探知18から発生されるS/N比19、および追尾処理部20によって求められる追尾品質21等に基づいて、予めデータテーブルとして記憶されたレーダパラメータ11の組み合わせの中から、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を一組選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0013】
以上のように、この実施の形態1では、検出範囲判定部14において、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を信号検出部15に選定するように構成したので、例えば、CPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0014】
実施の形態2.
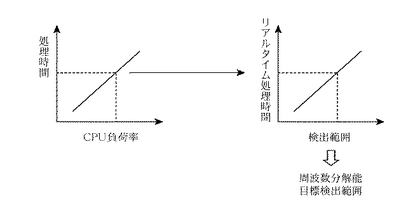
図3はこの発明の実施の形態2によるレーダパラメータの選定方法を示す概念図であり、この実施の形態2の信号処理時間データ12には、CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、およびリアルタイム処理を許容する処理時間に応じた検出範囲が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を求め、その求められた検出範囲となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0015】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態2では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
CPU負荷率からレーダ信号処理として利用可能な余剰となっている計算機リソースを求めることができ、その結果、計算機リソースによる信号処理時間を求めることができる。また、レーダ装置としては、レーダ信号処理のリアルタイム処理を保証する必要があり、そのリアルタイム処理を許容する処理時間に応じた検出範囲を求めることができる。このように、信号処理時間データ12には、図3に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、レーダ信号処理を行う時点におけるCPU負荷率13が分かれば、そのCPU負荷率13に応じた計算機リソースとして利用可能な信号処理時間を信号処理時間データ12から参照し、また、その信号処理時間に近似したリアルタイム処理を許容する処理時間に応じた検出範囲を信号処理時間データ12から参照する。さらに、その検出範囲に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。この時のレーダ装置の目標検出性能は、周波数分解能、目標検出範囲等として評価される。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0016】
以上のように、この実施の形態2では、信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を参照し、その検出範囲となるレーダパラメータ17を選定するように構成したので、CPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0017】
実施の形態3.
図4はこの発明の実施の形態3によるレーダパラメータの選定方法を示す概念図であり、この実施の形態3の信号処理時間データ12には、CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、計算機リソースとして利用可能な信号処理時間に応じた目標追尾時の追尾品質、および追尾維持を継続可能な追尾維持確率に応じた検出範囲が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を求め、その求められた検出範囲となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0018】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態3では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
CPU負荷率からレーダ信号処理として利用可能な余剰となっている計算機リソースを求めることができ、その結果、計算機リソースによる信号処理時間を求めることができる。また、信号処理時間から目標追尾時の追尾品質を求めることができる。さらに、追尾維持を継続可能な追尾維持確率から検出範囲を求めることができる。このように、信号処理時間データ12には、図4に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、レーダ信号処理を行う時点におけるCPU負荷率13が分かれば、そのCPU負荷率13に応じた計算機リソースとして利用可能な信号処理時間を信号処理時間データ12から参照し、また、その信号処理時間に応じた目標追尾時の追尾品質を信号処理時間データ12から参照する。さらに、その追尾品質に対応する追尾維持を継続可能な追尾維持確率に応じた検出範囲を信号処理時間データ12から参照する。さらに、その検出範囲に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0019】
以上のように、この実施の形態3では、信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じて追尾維持を継続可能なような検出範囲を参照し、その検出範囲となるレーダパラメータ17を選定するように構成したので、CPU負荷率13が変動しても、目標追尾時の追尾品質および追尾維持を継続することができる。
【0020】
実施の形態4.
図5はこの発明の実施の形態4によるレーダパラメータの選定方法を示す概念図であり、この実施の形態4の信号処理時間データ12には、目標追尾時の追尾品質に応じた目標2の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾品質21に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0021】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態4では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
目標追尾時の追尾品質21から目標2の観測間隔を求めることができる。また、CPU負荷率からリアルタイム処理を許容する処理時間を求めることができる。このように、信号処理時間データ12には、図5に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、追尾処理部20により発生された現在の追尾品質21が分かれば、その追尾品質21を維持するための目標2の観測間隔を参照し、また、現在のCPU負荷率13から、その観測間隔で信号処理した場合の計算機リソースによる信号処理時間を参照し、その信号処理時間からリアルタイム処理を許容する処理時間を参照する。さらに、その処理時間に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。なお、追尾品質21とは、レーダ信号処理の追尾処理において、目標2とする信号が形成する履歴(航跡等)の信頼度を与える指標である。追尾品質の計算には、目標探知部18における信号処理で得られるS/N比19等と合わせて評価が行われる。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0022】
以上のように、この実施の形態4では、信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾品質21に応じてリアルタイム処理を許容する処理時間を参照し、その処理時間となるレーダパラメータ17を選定するように構成したので、追尾品質21およびCPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0023】
実施の形態5.
図6はこの発明の実施の形態5によるレーダパラメータの選定方法を示す概念図であり、この実施の形態5の信号処理時間データ12には、追尾維持を継続可能な追尾維持確率に応じた目標2の観測間隔およびCPU負荷率に応じたリアルタイム処理を許容する処理時間が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾維持確率に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0024】
次に動作について説明する。
図2において、信号検出部15、目標探知18、および表示処理部22の動作は、上記実施の形態1と同様であるが、この実施の形態4では、追尾処理部20において、追尾品質21ではなく、追尾維持確率を発生するものとする。以下、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
目標追尾時の追尾維持を継続可能な追尾維持確率から目標2の観測間隔を求めることができる。また、CPU負荷率からリアルタイム処理を許容する処理時間を求めることができる。このように、信号処理時間データ12には、図6に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、追尾処理部20により発生された現在の追尾維持確率が分かれば、その追尾維持確率を維持するための目標2の観測間隔を参照し、また、現在のCPU負荷率13から、その観測間隔で信号処理した場合の計算機リソースによる信号処理時間を参照し、その信号処理時間からリアルタイム処理を許容する処理時間を参照する。さらに、その処理時間に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。なお、追尾維持確率とは、レーダ装置が観測する目標情報を用い、ソフトウェア等で形成される目標の追尾ファイルを定期的に更新することにより、目標の追尾を継続することができる確率である。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0025】
以上のように、この実施の形態5では、信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾維持確率に応じてリアルタイム処理を許容する処理時間を参照し、その処理時間となるレーダパラメータ17を選定するように構成したので、追尾維持確率およびCPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【図面の簡単な説明】
【0026】
【図1】この発明の実施の形態1によるレーダ装置による目標検出状況を示す説明図である。
【図2】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図3】この発明の実施の形態2によるレーダパラメータの選定方法を示す概念図である。
【図4】この発明の実施の形態3によるレーダパラメータの選定方法を示す概念図である。
【図5】この発明の実施の形態4によるレーダパラメータの選定方法を示す概念図である。
【図6】この発明の実施の形態5によるレーダパラメータの選定方法を示す概念図である。
【符号の説明】
【0027】
1 自機、2 目標、3 レーダ波、4 レーダ反射波、11 レーダパラメータ、12 信号処理時間データ(データ記憶部)、13 CPU負荷率、14 検出範囲判定部、15 信号検出部、16 受信信号、17 レーダパラメータ、18 目標探知部、19 S/N比(検出誤差)、20 追尾処理部、21 追尾品質、22 表示処理部。
【技術分野】
【0001】
この発明は、航空機等のプラットフォームに搭載され、電波を用いて目標との相対距離および相対速度を継続して検出し、目標の探知、捕捉および追尾を行うレーダ装置に関するものである。
【背景技術】
【0002】
航空機等のプラットフォームに搭載され、目標に対する相対距離および相対速度を検出するレーダ装置には、パルス・レーダおよびパルスドップラ・レーダ等がある。これらレーダ装置は、パルス変調されたレーダ波の送受信を行い、目標を検出しているが、パルス幅およびパルス繰り返し間隔等のレーダパラメータは、予め選定したものを使用している(例えば、特許文献1参照)。
【0003】
【特許文献1】特許第3409746号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来のレーダ装置は以上のように構成されているので、航空機等のプラットフォームでは、そのプラットフォームの機体内に搭載可能な容積および質量、また、使用可能な電源容量が限られているため、レーダ装置においてデジタル信号処理を行う信号処理部として搭載可能なCPU数等に制限があり、したがって、信号処理能力にも制限がある。一方、目標の探知および追尾を継続するためには、レーダ信号処理をリアルタイム化する必要がある。この時、パルス幅およびパルス繰り返し間隔等のレーダパラメータは、予めレーダモード毎に選定された値であるが、このレーダパラメータに対応した処理を、受信信号の全ての領域に対して実施するので、処理時間がたくさん必要となり、CPU負荷率によってはリアルタイム処理を保証しきれないことがあるなどの課題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、リアルタイム処理を保証しつつ、目標の探知および追尾を継続するレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、当該レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを信号検出部に選定する検出範囲判定部を備えたものである。
【発明の効果】
【0007】
以上のように、この発明によれば、検出範囲判定部において、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを信号検出部に選定するように構成したので、例えば、CPU負荷率が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる効果がある。
【発明を実施するための最良の形態】
【0008】
実施の形態1.
図1はこの発明の実施の形態1によるレーダ装置による目標検出状況を示す説明図であり、図において、自機1は、この発明のレーダ装置が搭載され、目標2に対してレーダ波3を送信し、目標2で反射されたレーダ反射波4から、そのレーダ装置で目標までの相対距離および目標との相対速度を検出するものである。
【0009】
図2はこの発明の実施の形態1によるレーダ装置を示す構成図であり、図において、レーダパラメータ11は、パルス幅およびパルス繰り返し間隔等からなるものであり、データテーブルとして複数組のレーダパラメータが予め記憶されたものである。この実施の形態1によるレーダ装置では、このレーダパラメータ11から一組のレーダパラメータ17を選定し、そのレーダパラメータ17に基づいたレーダ波3を生成して送信すると共に、目標2で反射したレーダ反射波4をそのレーダパラメータ17に基づいて信号処理し、レーダ反射波4の信号検出を行うものである。
信号処理時間データ(データ記憶部)12は、データテーブルとして予め記憶されたものである。例えば、図2におけるデータテーブルに示すように、レーダ装置の動作モード、目標との相対距離および相対速度からなる目標検出処理を行う処理範囲、および動作モードおよび処理範囲の組み合わせに対して処理に必要な処理時間からなるものである。なお、図2に示したデータテーブルは、信号処理時間データ12のデータテーブルのうちの一部であり、詳しくは実施の形態2から実施の形態5で述べる。
CPU負荷率13は、システム全体が持つCPU処理能力に対する、図2における各種構成の動作に応じて使用されている現在の処理負荷の割合であり、この実施の形態1では、現在のCPU負荷率13が逐次入力されるものとする。
【0010】
検出範囲判定部14は、レーダパラメータ11、信号処理時間データ12、CPU負荷率13、後述するS/N比19および追尾品質21等に基づいて、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を選定するものである。
信号検出部15は、目標2で反射したレーダ反射波4に応じた受信信号16を検出判定部14により選定されたレーダパラメータ17に基づいて信号処理することにより、目標2に相当する信号の検出を行うものである。
目標探知部18は、検出された目標2に相当する信号に応じて目標探知を行うと共に、それら信号および雑音に応じたS/N比(検出誤差)19を発生するものである。
追尾処理部20は、目標探知された信号に応じて目標2の追尾処理を行うと共に、追尾品質21を発生するものである。
表示処理部22は、目標2の探知および追尾状況を表示するものである。
【0011】
次に動作について説明する。
図1において、自機1のレーダ装置では、目標2に対してレーダ波3を送信すると共に、目標2で反射されたレーダ反射波4を受信する。
図2において、信号検出部15では、そのレーダ反射波4に応じた高周波信号である受信信号16を中間周波数まで周波数変換し、予め選定されたレーダパラメータ17に基づいて帯域通過フィルタ処理し、さらに、アナログ・デジタル変換し、高速フーリェ変換して目標2に相当する信号の検出を行う。目標探知18では、検出された目標2に相当する信号に応じて、レーダ波3とレーダ反射波4との時間差から相対距離、ドップラ偏移から相対速度を検出し、目標探知を行うと共に、それら信号および雑音に応じたS/N比19を発生する。
追尾処理部20では、目標探知された信号の時間上の履歴を用い、目標航跡を継続して追尾すると共に、航跡が目標2である確からしさの指標として追尾品質21を求める。表示処理部22では、目標2の追尾状況を表示する。
【0012】
以上のような、レーダ装置において、目標の探知および追尾を継続するには、レーダ信号処理のリアルタイム処理を保証しなくてはならない。
一方、レーダ装置において、選定されるレーダパラメータ17に応じて、CPUによる処理負荷、追尾品質、および最大探知距離等が増減する。例えば、観測可能な目標2との相対距離の最大値(最大探知距離)は、受信信号16の観測時間(=2×観測可能な最大距離/光速)によるが、観測時間が長くなれば信号処理するデータが増え、CPU処理負荷が高く、また、信号処理時間が長くなる。
そこで、検出範囲判定部14では、予めデータテーブルとして記憶された信号処理時間データ12、CPUより逐次入力されるCPU負荷率13、目標探知18から発生されるS/N比19、および追尾処理部20によって求められる追尾品質21等に基づいて、予めデータテーブルとして記憶されたレーダパラメータ11の組み合わせの中から、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を一組選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0013】
以上のように、この実施の形態1では、検出範囲判定部14において、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を信号検出部15に選定するように構成したので、例えば、CPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0014】
実施の形態2.
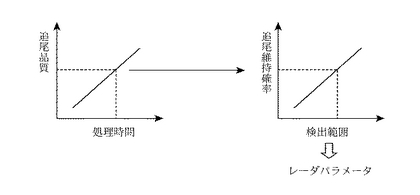
図3はこの発明の実施の形態2によるレーダパラメータの選定方法を示す概念図であり、この実施の形態2の信号処理時間データ12には、CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、およびリアルタイム処理を許容する処理時間に応じた検出範囲が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を求め、その求められた検出範囲となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0015】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態2では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
CPU負荷率からレーダ信号処理として利用可能な余剰となっている計算機リソースを求めることができ、その結果、計算機リソースによる信号処理時間を求めることができる。また、レーダ装置としては、レーダ信号処理のリアルタイム処理を保証する必要があり、そのリアルタイム処理を許容する処理時間に応じた検出範囲を求めることができる。このように、信号処理時間データ12には、図3に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、レーダ信号処理を行う時点におけるCPU負荷率13が分かれば、そのCPU負荷率13に応じた計算機リソースとして利用可能な信号処理時間を信号処理時間データ12から参照し、また、その信号処理時間に近似したリアルタイム処理を許容する処理時間に応じた検出範囲を信号処理時間データ12から参照する。さらに、その検出範囲に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。この時のレーダ装置の目標検出性能は、周波数分解能、目標検出範囲等として評価される。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0016】
以上のように、この実施の形態2では、信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を参照し、その検出範囲となるレーダパラメータ17を選定するように構成したので、CPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0017】
実施の形態3.
図4はこの発明の実施の形態3によるレーダパラメータの選定方法を示す概念図であり、この実施の形態3の信号処理時間データ12には、CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、計算機リソースとして利用可能な信号処理時間に応じた目標追尾時の追尾品質、および追尾維持を継続可能な追尾維持確率に応じた検出範囲が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じた検出範囲を求め、その求められた検出範囲となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0018】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態3では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
CPU負荷率からレーダ信号処理として利用可能な余剰となっている計算機リソースを求めることができ、その結果、計算機リソースによる信号処理時間を求めることができる。また、信号処理時間から目標追尾時の追尾品質を求めることができる。さらに、追尾維持を継続可能な追尾維持確率から検出範囲を求めることができる。このように、信号処理時間データ12には、図4に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、レーダ信号処理を行う時点におけるCPU負荷率13が分かれば、そのCPU負荷率13に応じた計算機リソースとして利用可能な信号処理時間を信号処理時間データ12から参照し、また、その信号処理時間に応じた目標追尾時の追尾品質を信号処理時間データ12から参照する。さらに、その追尾品質に対応する追尾維持を継続可能な追尾維持確率に応じた検出範囲を信号処理時間データ12から参照する。さらに、その検出範囲に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0019】
以上のように、この実施の形態3では、信号処理時間データ12のデータテーブルに基づいて、現在のCPU負荷率13に応じて追尾維持を継続可能なような検出範囲を参照し、その検出範囲となるレーダパラメータ17を選定するように構成したので、CPU負荷率13が変動しても、目標追尾時の追尾品質および追尾維持を継続することができる。
【0020】
実施の形態4.
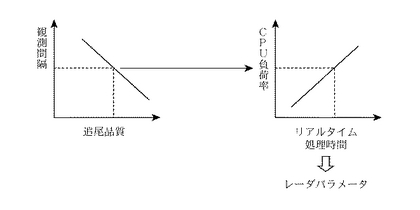
図5はこの発明の実施の形態4によるレーダパラメータの選定方法を示す概念図であり、この実施の形態4の信号処理時間データ12には、目標追尾時の追尾品質に応じた目標2の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾品質21に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0021】
次に動作について説明する。
図2において、信号検出部15、目標探知18、追尾処理部20、および表示処理部22の動作は、上記実施の形態1と同様であり、この実施の形態4では、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
目標追尾時の追尾品質21から目標2の観測間隔を求めることができる。また、CPU負荷率からリアルタイム処理を許容する処理時間を求めることができる。このように、信号処理時間データ12には、図5に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、追尾処理部20により発生された現在の追尾品質21が分かれば、その追尾品質21を維持するための目標2の観測間隔を参照し、また、現在のCPU負荷率13から、その観測間隔で信号処理した場合の計算機リソースによる信号処理時間を参照し、その信号処理時間からリアルタイム処理を許容する処理時間を参照する。さらに、その処理時間に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。なお、追尾品質21とは、レーダ信号処理の追尾処理において、目標2とする信号が形成する履歴(航跡等)の信頼度を与える指標である。追尾品質の計算には、目標探知部18における信号処理で得られるS/N比19等と合わせて評価が行われる。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0022】
以上のように、この実施の形態4では、信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾品質21に応じてリアルタイム処理を許容する処理時間を参照し、その処理時間となるレーダパラメータ17を選定するように構成したので、追尾品質21およびCPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0023】
実施の形態5.
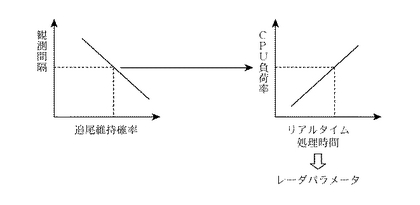
図6はこの発明の実施の形態5によるレーダパラメータの選定方法を示す概念図であり、この実施の形態5の信号処理時間データ12には、追尾維持を継続可能な追尾維持確率に応じた目標2の観測間隔およびCPU負荷率に応じたリアルタイム処理を許容する処理時間が予めデータテーブルとして記憶されたものである。
また、検出範囲判定部14は、その信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾維持確率に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となる一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定するものである。その他の構成については図2と同様である。
【0024】
次に動作について説明する。
図2において、信号検出部15、目標探知18、および表示処理部22の動作は、上記実施の形態1と同様であるが、この実施の形態4では、追尾処理部20において、追尾品質21ではなく、追尾維持確率を発生するものとする。以下、目標の探知および追尾を継続するために、レーダ信号処理のリアルタイム処理を保証する動作について説明する。
目標追尾時の追尾維持を継続可能な追尾維持確率から目標2の観測間隔を求めることができる。また、CPU負荷率からリアルタイム処理を許容する処理時間を求めることができる。このように、信号処理時間データ12には、図6に示した特性を予めデータテーブルとして記憶しておく。
検出範囲判定部14では、追尾処理部20により発生された現在の追尾維持確率が分かれば、その追尾維持確率を維持するための目標2の観測間隔を参照し、また、現在のCPU負荷率13から、その観測間隔で信号処理した場合の計算機リソースによる信号処理時間を参照し、その信号処理時間からリアルタイム処理を許容する処理時間を参照する。さらに、その処理時間に対応した一組のレーダパラメータ17をレーダパラメータ11の組み合わせの中から選定し、信号検出部15に供給する。なお、追尾維持確率とは、レーダ装置が観測する目標情報を用い、ソフトウェア等で形成される目標の追尾ファイルを定期的に更新することにより、目標の追尾を継続することができる確率である。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【0025】
以上のように、この実施の形態5では、信号処理時間データ12のデータテーブルに基づいて、追尾処理部20により発生された現在の追尾維持確率に応じてリアルタイム処理を許容する処理時間を参照し、その処理時間となるレーダパラメータ17を選定するように構成したので、追尾維持確率およびCPU負荷率13が変動しても、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
【図面の簡単な説明】
【0026】
【図1】この発明の実施の形態1によるレーダ装置による目標検出状況を示す説明図である。
【図2】この発明の実施の形態1によるレーダ装置を示す構成図である。
【図3】この発明の実施の形態2によるレーダパラメータの選定方法を示す概念図である。
【図4】この発明の実施の形態3によるレーダパラメータの選定方法を示す概念図である。
【図5】この発明の実施の形態4によるレーダパラメータの選定方法を示す概念図である。
【図6】この発明の実施の形態5によるレーダパラメータの選定方法を示す概念図である。
【符号の説明】
【0027】
1 自機、2 目標、3 レーダ波、4 レーダ反射波、11 レーダパラメータ、12 信号処理時間データ(データ記憶部)、13 CPU負荷率、14 検出範囲判定部、15 信号検出部、16 受信信号、17 レーダパラメータ、18 目標探知部、19 S/N比(検出誤差)、20 追尾処理部、21 追尾品質、22 表示処理部。
【特許請求の範囲】
【請求項1】
受信信号を選定されたレーダパラメータに基づいて信号処理することにより、目標に相当する信号の検出を行う信号検出部と、
上記信号検出部により検出された目標に相当する信号に応じて目標の探知を行う目標探知部と、
上記目標探知部による目標探知された信号に応じて目標の追尾処理を行う追尾処理部と、
当該レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを上記信号検出部に選定する検出範囲判定部とを備えたレーダ装置。
【請求項2】
CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、およびリアルタイム処理を許容する処理時間に応じた検出範囲を予めデータテーブルとして記憶したデータ記憶部を備え、
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、現在のCPU負荷率に応じてリアルタイム処理を許容する検出範囲を求め、その求められた検出範囲となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項3】
CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、計算機リソースとして利用可能な信号処理時間に応じた目標追尾時の追尾品質、および追尾維持を継続可能な追尾維持確率に応じた検出範囲を予めデータテーブルとして記憶したデータ記憶部を備え、
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、現在のCPU負荷率に応じて追尾維持を継続可能となるような検出範囲を求め、その求められた検出範囲となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項4】
目標追尾時の追尾品質に応じた目標の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間を予めデータテーブルとして記憶したデータ記憶部を備え、
追尾処理部は、
目標の追尾処理を行うと共に、その追尾品質を発生し
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、上記追尾処理部により発生された追尾品質に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項5】
追尾維持を継続可能な追尾維持確率に応じた目標の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間を予めデータテーブルとして記憶したデータ記憶部を備え、
追尾処理部は、
目標の追尾処理を行うと共に、その追尾維持確率を発生し
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、上記追尾処理部により発生された追尾維持確率に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項1】
受信信号を選定されたレーダパラメータに基づいて信号処理することにより、目標に相当する信号の検出を行う信号検出部と、
上記信号検出部により検出された目標に相当する信号に応じて目標の探知を行う目標探知部と、
上記目標探知部による目標探知された信号に応じて目標の追尾処理を行う追尾処理部と、
当該レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータを上記信号検出部に選定する検出範囲判定部とを備えたレーダ装置。
【請求項2】
CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、およびリアルタイム処理を許容する処理時間に応じた検出範囲を予めデータテーブルとして記憶したデータ記憶部を備え、
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、現在のCPU負荷率に応じてリアルタイム処理を許容する検出範囲を求め、その求められた検出範囲となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項3】
CPU負荷率に応じた計算機リソースとして利用可能な信号処理時間、計算機リソースとして利用可能な信号処理時間に応じた目標追尾時の追尾品質、および追尾維持を継続可能な追尾維持確率に応じた検出範囲を予めデータテーブルとして記憶したデータ記憶部を備え、
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、現在のCPU負荷率に応じて追尾維持を継続可能となるような検出範囲を求め、その求められた検出範囲となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項4】
目標追尾時の追尾品質に応じた目標の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間を予めデータテーブルとして記憶したデータ記憶部を備え、
追尾処理部は、
目標の追尾処理を行うと共に、その追尾品質を発生し
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、上記追尾処理部により発生された追尾品質に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【請求項5】
追尾維持を継続可能な追尾維持確率に応じた目標の観測間隔、およびCPU負荷率に応じたリアルタイム処理を許容する処理時間を予めデータテーブルとして記憶したデータ記憶部を備え、
追尾処理部は、
目標の追尾処理を行うと共に、その追尾維持確率を発生し
検出範囲判定部は、
上記データ記憶部に記憶されたデータテーブルに基づいて、上記追尾処理部により発生された追尾維持確率に応じてリアルタイム処理を許容する処理時間を求め、その求められた処理時間となるレーダパラメータを選定することを特徴とする請求項1記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−329669(P2006−329669A)
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願番号】特願2005−149842(P2005−149842)
【出願日】平成17年5月23日(2005.5.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成18年12月7日(2006.12.7)
【国際特許分類】
【出願日】平成17年5月23日(2005.5.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]