
レーダ装置
【課題】ハードウェアや処理量が少なく、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善を行うことのできるレーダ装置を提供する。
【解決手段】レーダ装置は、受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を目標との相対速度または目標との相対距離を用いて算出し、位相補償量を用いて受信ビデオ信号の位相を補償し、位相補償された受信ビデオ信号をパルス圧縮する。
【解決手段】レーダ装置は、受信ビデオ信号をパルス圧縮し、パルス圧縮により生成された信号から目標までの距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出し、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を目標との相対速度または目標との相対距離を用いて算出し、位相補償量を用いて受信ビデオ信号の位相を補償し、位相補償された受信ビデオ信号をパルス圧縮する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、パルス変調された電波を目標に向けて放射し、その目標により反射されて戻り受信された電波を受信信号とするレーダ装置に関するものである。
【背景技術】
【0002】
従来のレーダ装置は、パルス内が交互にアップチャープ変調とダウンチャープ変調を繰り返した送信信号を送信し、目標で反射してきた送信信号を受信信号として受信し、受信信号をディジタル複素ビデオ信号に変換する手段と、ディジタル複素ビデオ信号をドップラ補正し、かつパルス圧縮する複数の信号処理手段と、パルス圧縮により生成された信号の振幅をもとに、その信号のレンジ補正をする複数の補正手段と、レンジ補正されたパルス圧縮により生成された信号にコヒーレント積分を施して目標の検出を行う手段とを備えている。そして、複数のコヒーレント積分結果から振幅の最大値を検出することで、目標の検出性能を改善する(例えば、特許文献1参照)。
【0003】
このレーダ装置では、ドップラーレンジ補正量が異なる複数のパルス圧縮回路とコヒーレント積分器を利用するため、ノンコヒーレント積分に代表される振幅情報のみを用いる積分方式に比べ、信号対雑音電力比(Signal to Noise Ratio:SNR)の改善により、目標検出性能の改善が期待できる。
【0004】
【特許文献1】特開2000−275332号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、このレーダ装置では、予め目標を等速運動と想定しドップラーレンジ補正量が異なる複数のパルス圧縮回路とコヒーレント積分器を用意する必要があり、ハードウェアや処理量が増大するという問題がある。
また、想定外の運動目標に対する目標検出性能の改善は困難という問題がある。
【0006】
この発明の目的は、ハードウェアや処理量が少なく、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善を行うことのできるレーダ装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係わるレーダ装置は、キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、上記受信信号をパルス圧縮するパルス圧縮手段と、上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度または上記目標との相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、を有する。
【発明の効果】
【0008】
このように、目標との相対距離または目標との相対速度を求め、それらを用いてアップチャープ変調された送信信号が送受信されて得られた受信信号およびダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を算出し、その位相補償量を用いて受信信号の位相補償を行うので、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善したレーダ装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
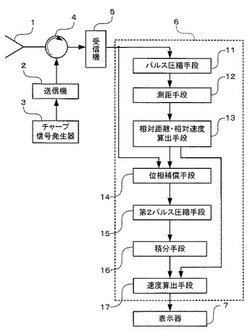
この発明の実施の形態1に係わるレーダ装置は、図1に示すように、空中線1、送信機2、チャープ信号発生器3、送受切替器4、受信機5、信号処理器6、表示器7を備える。
チャープ信号発生器3は、アップチャープ信号およびダウンチャープ信号を生成し、送信機2に出力する。
送信機2は、キャリア信号を所定のパルス繰り返し周期でパルス変調し、さらにアップチャープ信号およびダウンチャープ信号に従ってパルス毎交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。
送受切替器4は、送信機2から入力された送信RF信号を空中線1に出力する。そして、空中線1から送信RF信号が空中に放射される。
【0010】
空中に放射された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射する。
そこで、空中線1は、入射してきた反射RF信号を受信し、受信RF信号として送受切替器4に出力する。
送受切替器4は、空中線1から入力された受信RF信号を受信機5に出力する。
受信機5は、送受切替器4から入力された受信RF信号を増幅、位相検波の後、受信ビデオ信号に変換し、信号処理器6に出力する。
【0011】
なお、パルス内がアップチャープ変調された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射し受信されて受信RF信号が生成され、その受信RF信号が受信ビデオ信号に変換されるが、以下の説明においては、この受信ビデオ信号をアップチャープ受信ビデオ信号と称す。
また、パルス内がダウンチャープ変調された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射し受信されて受信RF信号が生成され、その受信RF信号が受信ビデオ信号に変換されるが、以下の説明においては、この受信ビデオ信号をダウンチャープ受信ビデオ信号と称す。
また、以下の説明において、時間間隔をパルス変調の所定のパルス繰り返し周期(Pulse Repetition Interval)と称し、PRIと略記する。
【0012】
この実施の形態1に係わる信号処理器6は、図1に示すように、パルス圧縮手段11、測距手段12、相対距離・相対速度算出手段13、位相補償手段14、第2パルス圧縮手段15、積分手段16、速度算出手段17を備えている。なお、位相補償手段14および第2パルス圧縮手段15をまとめて補償手段と称す。信号処理器6は、CPU、RAM、ROM、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従ってCPUで演算処理が行われる。
【0013】
パルス圧縮手段11は、受信ビデオ信号をパルス圧縮する機能を有する。
測距手段12は、パルス圧縮手段11の出力であるパルス圧縮により生成された信号の強度に基づく距離を算出する機能を有する。
相対距離・相対速度算出手段13は、測距手段12で算出されたアップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対距離および目標との相対速度を算出する機能を有する。
位相補償手段14は、相対距離・相対速度算出手段13で算出された目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を算出し、その位相補償量を用いて受信ビデオ信号の位相補償を行う機能を有する。
第2パルス圧縮手段15は、位相補償手段14の出力である位相補償された受信ビデオ信号をパルス圧縮する機能を有する。
積分手段16は、第2パルス圧縮手段15の出力である位相補償された受信ビデオ信号をパルス圧縮することにより生成された信号を複数加算する機能を有する。
速度算出手段17は、積分手段16の出力である周波数スペクトルに対し、相対距離・相対速度算出手段13の出力である目標との相対速度から周波数の折り返しを考慮し、目標との相対速度を算出する機能を有する。
【0014】
次に、実施の形態1に係わる信号処理器6の処理動作について図2を参照して説明する。
パルス圧縮手段11は、入力されたA/D変換後の受信ビデオ信号V(n,m)と、送信RF信号の変調成分に対して複素共役の関係にある参照信号Ex(m、mτ)とを相関演算し、レンジ方向に分散した信号をパルス圧縮する。例えば、処理時間を短縮のため高速フーリエ変換(Fast Fourier Transform:FFT)を利用することができる。
【0015】
パルス圧縮手段11に入力される受信ビデオ信号V(n,m)は、式(1)で表される。この受信ビデオ信号V(n,m)は、n番目の送信RF信号に対するものである。ここで、ΔtはA/Dサンプリング周期、Mは1PRI間のサンプリング点数、Nはパルスヒット数、Aは送信RF信号の振幅、f0は送信中心周波数、Tpriはパルス繰り返し周期、cは光速、R0はn=1、m=1における目標までの初期相対距離、vは目標の相対速度、プラスマイナス記号のプラスはアップチャープ受信ビデオ信号のとき選択され、マイナスはダウンチャープ受信ビデオ信号のとき選択され、B0は送信帯域幅、T0は送信時間、mはm番目のサンプリング信号、Tp(=T0)はパルス幅である。
【0016】
【数1】

【0017】
また、パルス圧縮手段11で用いる参照信号Ex(m,mτ)は、式(2)で表される。ここで、マイナスプラス記号のマイナスはアップチャープ受信ビデオ信号をパルス圧縮するとき選択され、プラスはダウンチャープ受信ビデオ信号をパルス圧縮するとき選択され、mτΔtは各パルスでの任意の時間シフトを表す。
【0018】
【数2】
【0019】
パルス圧縮手段11は、パルス圧縮として、式(1)で表された受信ビデオ信号V(n,m)と、式(2)で表された参照信号Ex(m,mτ)との相関演算結果RV・Ex(n,mτ)を式(3)に従って算出する。パルス圧縮することにより生成された信号とは、この相関演算結果RV・Ex(n,mτ)のことである。
【0020】
【数3】
【0021】
移動している目標からの反射RF信号を受信した場合、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す目標移動の影響を受けた目標までの距離とダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す目標移動の影響を受けた目標までの距離が、真の目標との相対距離R0に対して異なる方向に変化する。以下の説明において、この現象を距離シフトと記述する。
測距手段12は、パルス圧縮手段11の出力であるn回目に受信された受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離Rpeak(n)を、式(4)に従って算出する。
【0022】
【数4】
【0023】
ここで、max_R(RV・Ex(n,mτ))は、相関演算結果RV・EX(n,mτ)の振幅が最大を示す距離シフトした目標までの距離を表す。
【0024】
相対距離・相対速度算出手段13は、測距手段12で算出されたアップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差から目標との相対距離および目標との相対速度を算出する。
ここでは、目標までのn=1、m=1における初期相対距離R0と、アップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離との距離差ΔRu、ΔRdの導出について説明する。この説明するΔRu、ΔRdは、相対距離・相対速度算出手段13で、目標との相対距離または目標との相対速度を算出する際に用いられる。
相関演算の式(3)の中のビデオ信号V(n,m)と参照信号Ex(m,mτ)の積は、式(3)の1/c2、Δt2、mτ2Δt2を含む項がexp(j0)すなわち1に近似できるので、式(5)に書き換えることができる。
【0025】
【数5】
【0026】
式(5)のmτΔtが式(6)の関係が成り立つ時、式(3)の中のV(n,m)・Ex(m,mτ)は式(7)のように表される。そして、式(3)の相関演算結果RV・Ex(n,mτ)の振幅が最大をとることが分かる。
【0027】
【数6】
【0028】
また、式(6)より、目標までのn=1、m=1における初期相対距離
R0(=R0−v(n−1)Tpri)と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差ΔRu、ΔRdは、近似的に式(8)で表わされる。
【0029】
【数7】
【0030】
ただし、ΔT=(T0/B0)・f0とする。
また、式(8)で求めた目標までの初期相対距離R0と距離シフトした目標までの距離の差ΔRu、ΔRdと目標との相対速度vの関係式を用いて、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ruとダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rdは、近似的に式(9)で表わされる。図3には、その様子を図示する。
【0031】
【数8】
【0032】
同時刻にパルス内がアップチャープ変調された送信RF信号とダウンチャープ変調された送信RF信号とが送信されるときは、アップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ru、rdを用いて、式(10)、式(11)により、目標との相対距離R’0、相対速度v’を算出することができる。算出した目標との相対距離R’0と相対速度v’は、真の目標との相対距離と相対速度と区別するために、サフィックスをつけて表記している。
【0033】
【数9】
【0034】
しかし、この発明では、PRI毎にパルス内がアップチャープ変調された送信信号とダウンチャープ変調された送信信号を交互に繰り返し送信されているので、PRI間の目標移動によって測距・測速度精度が劣化するという問題がある。
そこで、この発明では、1PRI間の目標移動を考慮することにより、精度の高い目標との相対距離と目標との相対速度の算出を実現する。図4には、1PRI間の目標移動を考慮した場合のパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離を示す。
アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ru、1PRI後に送信したダウンチャープ変調された送信信号に係わるダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rdは、近似的に式(12)で表される。
【0035】
【数10】
【0036】
また、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rd、1PRI後に送信したアップチャープ変調された送信信号に係わるアップチャープ受信ビデオ信号をパルス圧縮することにより生成された距離シフトした信号の振幅が最大を示す目標までの距離ruは、近似的に式(13)で表される。
【0037】
【数11】
【0038】
したがって、相対距離・相対速度算出手段13では、式(10)、式(11)に代えて、式(14)、式(15)により1PRI間の目標移動を考慮した目標との相対距離R’0、目標との相対速度v’を算出する。式(14)における目標との相対速度v’は、式(15)に従い算出した目標との相対速度v’を用いる。式(15)におけるマイナスプラス記号は、アップチャープ受信ビデオ信号からダウンチャープ受信ビデオ信号に変化するときマイナス、ダウンチャープ受信ビデオ信号からアップチャープ受信ビデオ信号に変化するときプラスが選択される。
式(14)、(15)におけるru、rdは、測距手段12の出力であるアップチャープ受信ビデオ信号、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離Rpeak(n)から選択される。
【0039】
【数12】
【0040】
以下、PRI毎に式(14)、(15)で算出される目標との相対距離をR’(n)、目標との相対速度をv’(n)と記述し、nはn=1,2、・・・、(N−1)とする。
位相補償手段14は、PRI毎に相対距離・相対速度算出手段13から入力される目標との相対速度v’(n)を用いて、アップチャープ受信ビデオ信号およびダウンビデオ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように式(16)を用いて位相補償量φcor(n,m)を算出する。そして、位相補償手段14は、位相補償量φcor(n,m)を用いて受信ビデオ信号V(n,m)の位相補償を式(17)に従って行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0041】
【数13】
【0042】
ここで、マイナスプラス記号は、位相補償される受信ビデオ信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
第2パルス圧縮手段15は、位相補償手段14の出力である位相補償後の受信ビデオ信号V’(n,m)を、式(18)を用いてパルス圧縮手段11と同様に、パルス圧縮を行い、パルス圧縮により生成された信号R’V・Ex(n,mτ)を出力する。
【0043】
【数14】
【0044】
このような処理を行うことによって、図5に示すように位相補償されたアップチャープ受信ビデオ信号とダウンチャープビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になる。
【0045】
積分手段16は、パルス間での積分を行うものであり、第2パルス圧縮手段15の出力であるパルス圧縮することにより生成された信号R’V・Ex(n,mτ)を入力とし、例えば、高速フーリエ変換処理等を行い、レンジビン毎の信号成分、即ち、周波数スペクトルF(k,mτ)を式(19)に従って求めることにより、各周波数ビンの積分を行う。
【0046】
【数15】
【0047】
ここで、kは周波数ビン番号、FFT_numはFFTポイント数を表す。(N−1)がFFTポイント数未満の場合は、R’V・Ex(n,mτ)に0を補充する。
【0048】
速度算出手段17は、積分手段16の出力である周波数スペクトルに対し、相対距離・相対速度算出手段13の出力である目標との相対速度から周波数の折り返しを考慮して、高精度な目標との相対速度を求める。
速度算出手段17は、式(20)を用いて速度帯域vbandを算出する。また、速度算出手段17は、式(21)を用いて周波数ビンの速度分解能Δvを算出する。
【0049】
【数16】
【0050】
また、速度算出手段17は、式(20)、式(21)に基づき、周波数の折り返しを考慮した各周波数ビンの速度vbin(k)を式(22)を用いて求める。したがって、FFTポイント数を多くすることにより、より速度分解能を上げることが可能になる。
【0051】
【数17】
【0052】
ここで、floor(X)は、Xを超えない最大の整数を示す。
また、相対距離・相対速度算出手段13の出力である目標との相対速度に代えて、平均相対速度算出手段19の出力である複数の目標との相対速度の平均相対速度v(バー)が入力される場合は、式(22)中のv’(1)に代えて、v(バー)を用いる。同様に、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度v(ハット)0が入力される場合は、式(22)中のv’(1)に代えて、v(ハット)0を用いる。
速度算出手段17は、周波数スペクトルと周波数の折り返しを考慮した各周波数ビンの速度を表示器7に出力する。
表示器7は、速度算出手段17からの周波数スペクトルと周波数の折り返しを考慮した各周波数ビンの速度を表示する。
【0053】
このように、実施の形態1に係わるレーダ装置は、受信ビデオ信号をパルス圧縮するパルス圧縮手段11と、パルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離を算出する測距手段12と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差と1PRI間の目標移動を考慮して目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段13と、受信ビデオ信号の位相補償を行うことにより、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、目標との相対速度を用いて位相補償量を算出し、その位相補償量を用いて受信ビデオ信号の位相を補償する位相補償手段14と、位相補償された受信ビデオ信号をパルス圧縮する第2パルス圧縮手段15と、第2パルス圧縮手段15でパルス圧縮することにより生成された信号を複数加算する積分手段16と、積分手段16からの出力である周波数スペクトルに対して周波数の折り返しを考慮して目標との相対速度を算出する速度算出手段17と、を有するので、従来のように予めある程度目標の運動を想定し、ドップラ−レンジ補正量が異なる複数のパルス圧縮回路を用意せず、目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0054】
実施の形態2.
この発明の実施の形態2に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態2に係わる信号処理器6Bは、図6に示すように、実施の形態1に係わる信号処理器6の位相補償手段14および第2パルス圧縮手段15の代わりに補償手段としてのレンジ補正手段18を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0055】
実施の形態2に係わるレンジ補正手段18は、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
次に、実施の形態2に係わる信号処理器6Bの処理動作について図7を参照して説明する。
レンジ補正手段18は、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、式(23)に従って、レンジ補正量Rcor(n)を算出する。
【0056】
【数18】
【0057】
ここで、v’(n)はn回目の測速度結果を示す。プラスマイナス記号は、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号をレンジ補正する場合プラス、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号をレンジ補正する場合マイナスが選択される。
また、レンジ補正手段18は、式(24)を用いて、レンジ補正量Rcor(n)をレンジビン単位で表すレンジ補正量Rcor_bin(n)に変換する。
【0058】
【数19】
【0059】
ここで、Δr(=cΔt/2)はサンプリング間隔を表す。
そして、レンジ補正手段18は、算出されたレンジ補正量Rcor_bin(n)を用いて、式(25)に従って、パルス圧縮することにより生成された信号RV・Ex(n,mτ)のレンジ補正を行い、レンジ補正された信号RV・Ex_cor(n,mτ)を出力する。このような処理を行うことによって、図8に示すように、パルス圧縮により生成され、レンジ補正された信号の振幅が最大を示す目標までの距離を同一にすることができる。
【0060】
【数20】
【0061】
このように、実施の形態2に係わるレーダ装置は、実施の形態1に係わる位相補償手段14および第2パルス圧縮手段15に代えて、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、そのレンジ補正量を用いてパルス圧縮することにより生成された信号のレンジ補正を行うレンジ補正手段18を備えたので、受信ビデオ信号に対するパルス圧縮が1回で済み、構成が簡易化され、且つ、目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0062】
実施の形態3.
この発明の実施の形態3に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態3に係わる信号処理器6Cは、図9に示すように、実施の形態1に係わる信号処理器6に平均相対速度算出手段19が追加され、位相補償手段14Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0063】
平均相対速度算出手段19は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度が入力され、全測速度((パルス数−1)分)結果から平均相対速度を算出する機能を有する。
次に、実施の形態3に係わる信号処理器6Cの処理動作について図10を参照して説明する。
平均相対速度算出手段19は、式(26)に従って、目標との(パルス数−1)分の相対速度v’(n)を用いて、平均相対速度v(バー)を算出する。算出された平均相対速度v(バー)は、各パルスの受信ビデオ信号の位相の補償に用いる。
【0064】
【数21】
【0065】
位相補償手段14Bは、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(27)に従って位相補償量φcor(n,m)を算出する。そして、位相補償手段14Bは、位相補償量φcor(n,m)を用いて、式(28)に従って、受信ビデオ信号の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0066】
【数22】
【0067】
ここで、マイナスプラス記号は、位相補償される信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
【0068】
このように、実施の形態3に係わるレーダ装置は、(パルス数−1)分の測速度結果の平均相対速度を算出する平均相対速度算出手段19を備えたので、パルス毎の測速度を用いて位相補償を行ったときには測速度の誤差により、位相補償精度が低下する可能性があるが、平均相対速度を用いることにより安定した位相補償精度を保つことができ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0069】
実施の形態4.
この発明の実施の形態4に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Dが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態4に係わる信号処理器6Dは、図11に示すように、実施の形態3に係わる信号処理器6Cの平均相対速度算出手段19の代わりに基準相対速度・相対加速度算出手段20を有し、位相補償手段14Cが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0070】
基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度を入力とし、全測速度((パルス数−1)分)結果から、最小二乗法により目標との基準相対速度と相対加速度を算出する機能を有する。
次に、実施の形態4に係わる信号処理器6Dの処理動作について図12を参照して説明する。
基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である目標との複数の相対速度v’(n)を入力とし、全測速度((パルス数−1)分)結果から、最小二乗法により目標との基準相対速度と相対加速度を算出する。
時間tn(=(n−1)Tpri)の速度v(ハット)(n)は、目標との相対加速度a(ハット)、1回目のパルス送信からの経過時間tn、および目標との基準相対速度v(ハット)0とを用いると、式(29)で表される。
【0071】
【数23】
【0072】
そこで、基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度v’(n)を用いて、式(30)と式(31)とに従い、最小二乗法により、目標との相対加速度a(ハット)と目標との基準相対速度v(ハット)0を算出する。
【0073】
【数24】
【0074】
位相補償手段14Cは、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)、目標との基準相対速度v(ハット)0を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(32)に従い、位相補償量φcor(n,m)を算出する。そして、位相補償手段14Cは、位相補償量φcor(n,m)を用いて、式(33)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’a(n,m)を出力する。
【0075】
【数25】
【0076】
ここで、マイナスプラス符号は、位相補償される受信ビデオ信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
【0077】
このように、実施の形態4に係わるレーダ装置は、(パルス数−1)分の測速度結果から最小二乗法により目標との基準相対速度、相対加速度を算出する基準相対速度・相対加速度算出手段20と、受信ビデオ信号V(n,m)に対し、加速度を考慮した位相補償を行い、加速度を含めた位相補償後の信号V’a(n,m)を出力する位相補償手段14Cを備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0078】
実施の形態5.
この発明の実施の形態5に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Eが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態5に係わる信号処理器6Eは、図13に示すように、実施の形態3に係わる信号処理器6Cと平均相対速度算出手段19Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態5に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との平均相対速度を算出する機能を有する。
【0079】
次に、実施の形態5に係わる信号処理器6Eの処理動作について図14を参照して説明する。
平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離から、最小二乗法により目標との平均相対速度を算出する。
平均相対速度算出手段19Bは、目標との相対距離R’(n)の1回目の測距結果R’(1)を基準とした相対距離r’(n)を、式(34)に従って算出する。
【0080】
【数26】
【0081】
なお、時間tn(=(n−1)Tpri)での目標との相対距離r(ハット)’(n)は、1回目のパルス送信からの経過時間tnと目標との初期相対距離r(ハット)1’を用いると、目標との平均相対速度v(バー)と式(35)の関係が成り立つ。
【0082】
【数27】
【0083】
そこで、平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である測距結果R’(n)を用いて、式(34)と式(36)に従い、目標との平均相対速度v(バー)を算出する。
【0084】
【数28】
【0085】
このように、実施の形態5に係わるレーダ装置は、(パルス数−1)分の測距結果から平均相対速度を算出する平均相対速度算出手段19Bを備えたので、パルス毎の測速度に基づいて位相補償を行うとき測速度誤差により位相補償精度が低下する可能性があるが、平均相対速度を用いて位相補償を行うので、安定した位相補償精度を保つことができ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0086】
実施の形態6.
この発明の実施の形態6に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Fが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態6に係わる信号処理器6Fは、図15に示すように、実施の形態3に係わる信号処理器6Cの位相補償手段14Bおよび第2パルス圧縮手段15の代わりにレンジ補正手段18Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態6に係わるレンジ補正手段18Bは、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように受信ビデオ信号のパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
【0087】
次に、実施の形態6に係わる信号処理器6Fの処理動作について図16を参照して説明する。
レンジ補正手段18Bは、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、式(37)に従い、レンジ補正量Rcor(n)を算出する。
【0088】
【数29】
【0089】
ここで、プラスマイナス記号は、レンジ補正される信号が、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の場合プラス、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の場合マイナスが選択される。
そして、レンジ補正手段18Bは、算出されたレンジ補正量Rcor(n)を用いて、式(24)、式(25)に従い、受信ビデオ信号をパルス圧縮することにより生成された信号RV・Ex(n,mτ)に対しレンジ補正を行い、レンジ補正後の信号RV・Ex_cor(n,mτ)を出力する。
【0090】
このように、実施の形態6に係わるレーダ装置は、実施の形態3の位相補償手段14Bおよび第2パルス圧縮手段15に代えて、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、パルス圧縮することにより生成された信号に対してレンジ補正を行うレンジ補正手段18Bを備えたので、パルス毎の測速度を用いてレンジ補正を行うとき測速度誤差によりレンジ補正精度が低下する可能性があるが、平均相対速度を用いてレンジ補正を行うので、安定したレンジ補正精度を保つことができ、受信ビデオ信号に対してパルス圧縮が1回で済み、構成が簡易化され、かつ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0091】
実施の形態7.
この発明の実施の形態7に係わるレーダ装置は、実施の形態6に係わるレーダ装置と信号処理器6Gが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態7に係わる信号処理器6Gは、図17に示すように、実施の形態6に係わる信号処理器6Fと平均相対速度算出手段19Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態7に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との平均相対速度を算出する機能を有する。
【0092】
次に、実施の形態7に係わる信号処理器6Gの処理動作について図18を参照して説明する。
実施の形態7に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離R’(n)を用いて、式(34)、式(36)に従い、目標との平均相対速度v(バー)を算出する。
【0093】
このように、実施の形態7に係わるレーダ装置は、複数のパルスでの目標との相対距離から算出された平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、パルス圧縮することにより生成された信号に対してレンジ補正を行うレンジ補正手段18Bを備えたので、パルス毎の測速度を用いてレンジ補正を行うとき測速度誤差によりレンジ補正精度が低下する可能性があるが、平均相対速度を用いてレンジ補正することにより安定したレンジ補正精度を保つことができ、受信ビデオ信号に対してパルス圧縮が1回で済み、構成が簡易化され、かつ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0094】
実施の形態8.
この発明の実施の形態8に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Hが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態8に係わる信号処理器6Hは、図19に示すように、実施の形態1に係わる信号処理器6と位相補償手段14Dが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態8に係わる位相補償手段14Dは、相対距離・相対速度算出手段13からの出力である目標との相対距離および目標との相対速度を用いて、位相補償量を求め、位相補償を行う機能を有する。
【0095】
次に、実施の形態8に係わる信号処理器6Hの処理動作について図20を参照して説明する。
位相補償手段14Dは、PRI毎に相対距離・相対速度算出手段13から入力される目標との相対距離R’(n)および目標との相対速度v’(n)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(38)に従い、位相補償量φcor(n,m)を算出する。それから、位相補償手段14Dは、位相補償量φcor(n,m)を用いて、式(39)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0096】
【数30】
【0097】
ここで、プラスマイナス記号、マイナスプラス記号は、位相補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0098】
このように、実施の形態8に係わるレーダ装置は、受信ビデオ信号を位相補償する補償項に目標との相対距離を含めたことによって、目標との相対距離の大きさによらず、積分効果と測速度の改善、すなわち、長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0099】
実施の形態9.
この発明の実施の形態9に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Jが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態9に係わる信号処理器6Jは、図21に示すように、実施の形態3に係わる信号処理器6Cと位相補償手段14Eが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態9に係わる位相補償手段14Eは、相対距離・相対速度算出手段13からの出力である目標との相対距離と、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、位相補償量を求め、位相補償を行う機能を有する。
【0100】
次に、実施の形態9に係わる信号処理器6Jの処理動作について図22を参照して説明する。
位相補償手段14Eは、相対距離・相対速度算出手段13の出力である目標との相対距離R’(n)と、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(40)に従い、位相補償量φcor(n,m)を算出する。そして、位相補償手段14Eは、位相補償量φcor(n,m)を用いて、式(41)に従い、受信ビデオ信号の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0101】
【数31】
【0102】
ここで、プラスマイナス記号、マイナスプラス記号は、位相補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0103】
このように、実施の形態9に係わるレーダ装置は、受信ビデオ信号を位相補償する補償項に目標との相対距離を含め、且つ、(パルス数−1)分の測速度結果の平均相対速度を算出する平均相対速度算出手段19を備えたので、目標との相対距離の大きさによらず、且つ、パルス毎の測速度結果の誤差によらず、安定した位相補償精度を保つことができ、長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0104】
実施の形態10.
この発明の実施の形態10に係わるレーダ装置は、実施の形態9に係わるレーダ装置と信号処理器6Kが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態10に係わる信号処理器6Kは、図23に示すように、実施の形態9に係わる信号処理器6Jの平均相対速度算出手段19の代わりに基準相対速度・相対加速度算出手段20を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態10に係わる基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度が入力され、全測速度((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
実施の形態10に係わる位相補償手段14Fは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度および目標との相対加速度と、相対距離・相対速度算出手段13の出力である目標との相対距離とが入力され、目標との相対距離、目標との基準相対速度および目標との相対加速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、位相補償量を求め、受信ビデオ信号の位相補償を行う機能を有する。
【0105】
次に、実施の形態10に係わる信号処理器6Kの処理動作について図24を参照して説明する。
基準相対速度・相対加速度算出手段20は、実施の形態4に係わる基準相対速度・相対加速度算出手段20と同様に、式(30)、式(31)に従い、目標との相対加速度と目標との基準相対速度を算出する。
【0106】
位相補償手段14Fは、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)、目標との基準相対速度v(ハット)0と、相対距離・相対速度算出手段13の出力である目標との相対距離R’(n)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(42)に従い位相補償量φcor(n,m)を算出する。そして、位相補償手段14Fは、位相補償量φcor(n,m)を用いて、式(43)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’a(n,m)を出力する。
【0107】
【数32】
【0108】
ここで、プラスマイナス記号、マイナスプラス記号は、補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0109】
このように、実施の形態10に係わるレーダ装置は、(パルス数−1)分の測速度結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20と、目標との相対距離、目標との基準相対速度および目標との相対加速度を考慮して受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の信号V’a(n,m)を出力する位相補償手段14Fを備えたので、加速度を有する長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0110】
実施の形態11.
この発明の実施の形態11に係わるレーダ装置は、実施の形態4に係わるレーダ装置と信号処理器6Lが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態11に係わる信号処理器6Lは、図25に示すように、実施の形態4に係わる信号処理器6Dの位相補償手段14および第2パルス圧縮手段15の代わりにレンジ補正手段18Cおよび加速度補償手段21を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0111】
実施の形態11に係わるレンジ補正手段18Cは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度と目標との相対加速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように受信ビデオ信号のパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
実施の形態11に係わる加速度補償手段21は、レンジ補正手段18Cの出力であるレンジ補正後の信号に対し、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度を用いて、加速度補償を行う機能を有する。
【0112】
次に、実施の形態11に係わる信号処理器6Lの処理動作について図26を参照して説明する。
レンジ補正手段18Cは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度v(ハット)0と目標との相対加速度a(ハット)を用いて、式(44)に従い、レンジ補正量Rcor(n)を算出する。
【0113】
【数33】
【0114】
ここで、v(ハット)(n)は式(29)に従い算出する。また、プラスマイナス記号は、レンジ補正がアップチャープ受信ビデオ信号のパルス圧縮により生成された信号に対して行うときプラス、ダウンチャープ受信ビデオ信号のパルス圧縮により生成された信号に対して行うときマイナスが選択される。
そして、レンジ補正手段18Cは、算出されたレンジ補正量Rcor(n)を用いて、式(24)、式(25)に従い、パルス圧縮により生成された信号RV・Ex(n,mτ)のレンジ補正を行い、レンジ補正後の信号RV・Ex_cor(n,mτ)を出力する。
【0115】
加速度補償手段21は、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)を用いて、式(45)に従い、レンジ補正手段18Cの出力であるレンジ補正されたパルス圧縮により生成された信号RV・Ex_cor(n,mτ)に対して加速度補償を行い、加速度補償後の信号R’V・Ex_cor(n,mτ)を出力する。
【0116】
【数34】
【0117】
このように、実施の形態11に係わるレーダ装置は、全測速度((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と相対加速度を算出する基準相対速度・相対加速度算出手段20と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、目標との基準相対速度と目標との相対加速度を用いてレンジ補正を行うレンジ補正手段18Cと、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度を用いて、レンジ補正されたパルス圧縮により生成された信号に対し、加速度を有する移動目標に対する目標検出性能と相対速度計測精度の劣化を防ぐ加速度補償を行う加速度補償手段21を備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。また、実施の形態10と比べ、パルス圧縮を2回行う必要がなく、構成が簡素になり、処理時間の短縮も可能となる。
【0118】
実施の形態12.
この発明の実施の形態12に係わるレーダ装置は、実施の形態11に係わるレーダ装置と信号処理器6Mが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態12に係わる信号処理器6Mは、図27に示すように、実施の形態11に係わる信号処理器6Lと基準相対速度・相対加速度算出手段20Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0119】
実施の形態12に係わる基準相対速度・相対加速度算出手段20Bは、パルス毎の相対距離・相対速度算出手段13の出力である複数の目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0120】
次に、実施の形態12に係わる信号処理器6Mの処理動作について図28を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離から、最小二乗法により目標との基準相対速度と目標との相対加速度を算出する。
基準相対速度・相対加速度算出手段20Bは、目標との相対距離R’(n)の1回目の測距結果R’(1)を基準とした相対距離r’(n)を、式(46)に従って算出する。
【0121】
【数35】
【0122】
a(ハット)を目標との相対加速度、tnを1回目のパルス送信からの経過時間、v(ハット)0を目標との基準相対速度、r(ハット)’1をR’(1)を基準とした目標との初期相対距離とすると、時間tn(=(n−1)Tpri)の距離r(ハット)’nは式(47)で表される。
【0123】
【数36】
【0124】
式(48)より、最小二乗法の入力を得る。
【0125】
【数37】
【0126】
各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0127】
【数38】
【0128】
このように、実施の形態12に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を持つ移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態10と比べ、パルス圧縮を2回行う必要がなく、構成が簡素になり、処理時間の短縮も可能となる。
【0129】
実施の形態13.
この発明の実施の形態13に係わるレーダ装置は、実施の形態4に係わるレーダ装置と信号処理器6Nが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態13に係わる信号処理器6Nは、図29に示すように、実施の形態4に係わる信号処理器6Dの基準相対速度・相対加速度算出手段20の代わりに基準相対速度・相対加速度算出手段20Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態13に係わる基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0130】
次に、実施の形態13に係わる信号処理器6Nの処理動作について図30を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、実施の形態12に係わる基準相対速度・相対加速度算出手段20Bと同様に、各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0131】
このように、実施の形態13に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0132】
実施の形態14.
この発明の実施の形態14に係わるレーダ装置は、実施の形態10に係わるレーダ装置と信号処理器6Pが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態14に係わる信号処理器6Pは、図31に示すように、実施の形態10に係わる信号処理器6Kの基準相対速度・相対加速度算出手段20の代わりに基準相対速度・相対加速度算出手段20Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態14に係わる基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0133】
次に、実施の形態14に係わる信号処理器6Pの処理動作について図32を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、実施の形態12に係わる基準相対速度・相対加速度算出手段20Bと同様に、各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0134】
このように、実施の形態14に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を有する長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0135】
実施の形態15.
この発明の実施の形態15に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Qが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態15に係わる信号処理器6Qは、図33に示すように、実施の形態1に係わる信号処理器6にPDI手段22が追加され、また、測距手段12の代わりにディスクリ距離算出手段23を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0136】
次に、実施の形態15に係わる信号処理器6Qの処理動作について図34を参照して説明する。ただし、Post Detection Integration(以下、「PDI」と称す)処理の回数を2回としている。
図35に示すように、低S/N環境では、雑音の振幅がパルス圧縮により生成された信号の振幅より大きくなり、雑音までの距離をパルス圧縮により生成された信号の距離として誤って算出する可能性がある。そのため、PDI手段22は、パルス圧縮により生成された信号に対しPDI処理を行い、雑音の影響を低減させる。
PDI手段22にはパルス圧縮により生成された信号が入力され、同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮により生成された信号に対して、式(53)に従い、PDI処理を行い、PDI処理により生成された信号RPDI(n,mτ)を出力する。ここで、NPDIはPDI処理回数を示す。
【0137】
【数39】
【0138】
A/Dサンプリング周波数が低い場合、測距手段12では、図36に示すように必ずしもパルス圧縮により生成された信号の振幅が最大を示す距離シフトした目標までの距離またはPDI処理により生成された信号の振幅が最大を示す目標までの距離をサンプリングするとは限らない。
測距手段12では、高精度に距離算出精度を行うためにA/Dサンプリング周波数を高くする必要があった。そこで、測距手段12に代えて、ディスクリ距離算出手段23は、A/Dサンプリング周波数が低い場合のパルス圧縮により生成された信号またはPDI処理により生成された信号の距離算出精度を向上するためにディスクリ距離算出処理を用いる。
この処理は、入力された信号から振幅の大きい隣接する2信号を取り出し、それらの振幅値の差(Δ)を、それらの2信号の和(Σ)で割った値をΔ/Σ値として生成する。このΔ/Σ値と、予め求めたΔ/Σ値と図36に示す距離補正量との関係に基づいて、生成したΔ/Σ値に相当する距離補正量RΔ/Σ_corを算出し、その距離補正量RΔ/Σ_corで補正した距離を真の入力された信号の目標までの距離として算出し、距離を求めるものである。以下、ディスクリ距離算出処理の具体的な処理内容を示す。
【0139】
ディスクリ距離算出手段23には、PDI処理により生成された信号RPDI(n,mτ)が入力される。次に、ディスクリ距離算出手段23は、図36の入力された信号の振幅が最大を示す距離RΔ/Σと各サンプル点(Ri,Ri)(i=a,b,c,d)との関係に示すように距離の真値が信号の振幅の大きい隣接する2点(Rb,Pb)、(Rc,Pc)の間にあるものと仮定し、式(54)に従い、Δ/Σ値Dを算出する。ただし、図中の丸印はサンプル点、Piはサンプル点に対する振幅値、Riはサンプル点に対する距離を示している。
【0140】
【数40】
【0141】
次に、図37に示すような予め精度良く算出された距離補正量とΔ/Σ値Dとの関係(=Δ/Σ曲線)から、距離補正量RΔ/Σ_corを求めることで、真の入力された信号の振幅が最大を示す距離RΔ/Σを式(55)により算出する。以下の説明において、振幅が最大を示す距離をピーク距離と記述する。
【0142】
【数41】
【0143】
相対距離・相対速度算出手段13は、ディスクリ測距手段23が出力するRΔ/ΣをRpeak(n)として入力する。そして、相対距離・相対速度算出手段13は、実施の形態1と同様に、式(14)、式(15)に従い、目標との相対距離と目標との相対速度を算出する。
【0144】
このように、実施の形態15に係わるレーダ装置は、PDI処理により生成された信号を出力するPDI手段22を備えたので、雑音をパルス圧縮により生成された信号の振幅が最大を示す距離シフトした目標までの距離と誤って選択することがなくなり、また、実施の形態1に係わる測距手段12に代えて、ディスクリ測距手段23を備えたので、低いA/Dサンプリング周波数でも高精度にパルス圧縮により生成された信号のピーク距離を算出することができ、かつ、ハードウエア規模が縮小され、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態2から14の場合も、PDI手段22を追加し、測距手段12の代わりにディスクリ距離算出手段23を用いることにより、同様な効果を得ることが可能になる。
【0145】
実施の形態16.
この発明の実施の形態16に係わるレーダ装置は、実施の形態15に係わるレーダ装置と信号処理器6Rが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態16に係わる信号処理器6Rは、図38に示すように、実施の形態15に係わる信号処理器6Qにピーク距離範囲算出手段24と第2ディスクリ距離算出手段23Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0146】
次に、実施の形態16に係わる信号処理器6Rの処理動作について図39を参照して説明する。ただし、PDI処理回数を2回としている。
ピーク距離範囲算出手段24には、PDI処理により生成された信号のピーク距離RΔ/Σが入力される。
図40に示すように、ピーク距離範囲算出手段24は、ディスクリ距離算出手段23から入力されるPDI処理により生成された信号のピーク距離RΔ/Σを中心にして、予め設定したピーク距離を求める設定範囲gateを用いて、式(56)に従い、ピーク距離を求める範囲の上限gateupを算出する。また、ピーク距離範囲算出手段24は、ディスクリ距離算出手段23から入力されるPDI処理により生成された信号のピーク距離RΔ/Σを中心にして、予め設定したピーク距離を求める設定範囲gateを用いて、式(57)に従い、ピーク距離を求める範囲の下限gatedownを算出する。
【0147】
【数42】
【0148】
第2ディスクリ距離算出手段23Bは、式(56)と式(57)で算出したピーク距離を求める範囲内で、式(54)と式(55)に従い、各パルスのパルス圧縮により生成された信号のピーク距離Rpeak(n,mτ)を算出する。したがって、図40に示すように、ピーク距離を求める範囲を限定することにより、誤って雑音を選択することがなくなり、各パルスのパルス圧縮により生成された信号のピーク距離算出精度の向上が可能になる。
【0149】
このように、実施の形態16に係わるレーダ装置は、ピーク距離を求める範囲を算出するピーク距離範囲算出手段24と、ピーク距離範囲内でピーク距離を算出する第2ディスクリ距離算出手段23Bを備えたので、誤って雑音を選択することがなくなり、ピーク距離算出精度の向上が可能になり、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態1から14の場合も、PDI手段22を追加し、測距手段12の代わりにディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23Bを用いることにより、同様な効果を得ることが可能になる。
【0150】
実施の形態17.
この発明の実施の形態17に係わるレーダ装置は、実施の形態16に係わるレーダ装置と送信機2B、信号処理器6Sが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態17に係わる信号処理器6Sは、図41に示すように、実施の形態16に係わる信号処理器6Rに、PDI手段22の代わりにPDI手段22Bと、相対距離・相対速度算出手段13の代わりに相対距離・相対速度算出手段13Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0151】
次に、実施の形態17に係わる信号処理器6Sの処理動作について図42と図43を参照して説明する。ただし、PDI処理回数を2回としている。
送信機2Bは、キャリア信号をPRI毎にパルス変調し、連続した複数パルス毎に交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。例えば、PDI処理回数が2回に設定された場合は、図42と図43のように、1回目と2回目のパルス変調された信号のパルスに対してはアップチャープ変調を行い、3回目と4回目のパルス変調された信号のパルスに対してはダウンチャープ変調を行い、5回目と6回目のパルス変調された信号のパルスに対してはアップチャープ変調を行う。送信機2Bは、この操作を繰り返して送信RF信号を生成し、送受切替器4に出力する。以下の説明において、送信機2の場合を交互送信、送信機2Bの場合を連続送信と記述する。図44に示したように、連続送信の場合、PDI処理に用いられるパルス圧縮により生成された信号間のピーク距離のレンジウォーク量が、交互送信の場合に比べ、小さくなる。したがって、PDI処理に用いられるパルス圧縮により生成された信号のピーク距離が互いに近くなり、PDI処理により生成された信号の振幅の劣化が小さくなり、PDI処理により生成された信号のピーク距離の算出精度が向上する。
【0152】
PDI手段22Bには、連続してPRI毎に同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号が入力される。
PDI手段22Bは、同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号に対して、式(58)に従い、PDI処理を行い、PDI処理により生成された信号RPDI(n,mτ)を出力する。
【0153】
【数43】
【0154】
相対距離・相対速度算出手段13Bは、式(59)、式(60)に従い、目標との相対距離と相対速度を算出し、位相補償手段14に出力する。ただし、n=1,2,・・・,floor(N/NPDI)NPDI、chirp(n)は送信RF信号がアップチャープ変調された信号かダウンチャープ変調された信号かを示しており、アップチャープ変調のときchirp(n)は1、ダウンチャープ変調のときchirp(n)は−1である。
【0155】
【数44】
【0156】
このように、実施の形態17に係わるレーダ装置は、実施の形態16の送信機2に代えて、キャリア信号をPRI毎にパルス変調し、連続した複数パルス毎に交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する送信機2Bを備えたので、PDI処理に用いられるパルス圧縮により生成された信号のピーク距離が互いに近くなり、PDI処理により生成された信号の振幅の劣化が小さくなり、第2ディスクリ距離算出手段23BのPDI処理により生成された信号のピーク距離算出精度の向上が可能になる。また、実施の形態15の相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Bを備えたので、PDI処理回数と目標移動を考慮して目標との相対距離と目標との相対速度を算出することが可能になり、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態1から15の場合も、PDI手段22Bを追加し、送信機2に代えて送信機2B、測距手段12に代えてディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23B、相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Bを用いることにより、同様な効果を得ることが可能になる。
【0157】
実施の形態18.
この発明の実施の形態18に係わるレーダ装置は、実施の形態17に係わるレーダ装置と送信機2C、信号処理器6Tが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態18に係わる信号処理器6Tは、図45に示すように、実施の形態17に係わる信号処理器6Sに、相対距離・相対速度算出手段13Bの代わりに相対距離・相対速度算出手段13Cを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0158】
次に、実施の形態18に係わる信号処理器6Tの処理動作について図46を参照して説明する。ただし、PDI処理回数を2回としている。
送信機2Cは、キャリア信号をPRI毎にパルス変調し、パルス内をアップチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。図46に示したように、アップチャープ変調のみのため、送信機の規模が小さくなるという利点がある。
【0159】
相対距離・相対速度算出手段13Cは、式(61)、式(62)に従い、目標との相対距離と相対速度を算出し、位相補償手段14に出力する。ただし、n=1,2,・・・,N−1である。また、実施の形態18の送信機2Cはアップチャープ変調のみを行うものとしているため、chirp(n)が1である。
【0160】
【数45】
【0161】
このように、実施の形態18に係わるレーダ装置は、実施の形態17の送信機2Bに代えて、キャリア周波数をPRI毎にパルス変調し、パルス内をアップチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する送信機2Cを備えたので、送信機の規模が小さくなり、また、実施の形態17の相対距離・相対速度算出手段13Bに代えて相対距離・相対速度算出手段13Cを備えたので、同じ傾きのチャープ変調で目標移動を考慮して目標との相対距離と目標との相対速度を算出することが可能になる。 また、実施の形態18の送信機2Cはアップチャープ変調のみを行ったが、ダウンチャープ変調のみの場合も同様な効果を得ることが可能になる。
また、実施の形態1から14の場合も、送信機2に代えて送信機2C、測距手段12に代えてディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23B、相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Cを用いることにより、同様な効果を得ることが可能になる。
【図面の簡単な説明】
【0162】
【図1】この発明の実施の形態1に係わるレーダ装置の構成図である。
【図2】実施の形態1に係わる信号処理器6の処理動作を説明するための図である。
【図3】距離シフトを利用した従来の目標との相対距離・速度算出方法を示す説明図である。
【図4】この発明の実施の形態1における距離シフトを利用し、PRI間の目標移動を考慮した目標との相対距離・速度算出方法を示す説明図である。
【図5】パルス圧縮の処理動作を示す説明図である。
【図6】この発明の実施の形態2に係わる信号処理器6Bの構成図である。
【図7】実施の形態2に係わる信号処理器6Bの処理動作を説明するための図である。
【図8】レンジ補正の処理動作を示す説明図である。
【図9】この発明の実施の形態3に係わる信号処理器6Cの構成図である。
【図10】実施の形態3に係わる信号処理器6Cの処理動作を説明するための図である。
【図11】この発明の実施の形態4に係わる信号処理器6Dの構成図である。
【図12】実施の形態4に係わる信号処理器6Dの処理動作を説明するための図である。
【図13】この発明の実施の形態5に係わる信号処理器6Eの構成図である。
【図14】実施の形態5に係わる信号処理器6Eの処理動作を説明するための図である。
【図15】この発明の実施の形態6に係わる信号処理器6Fの構成図である。
【図16】実施の形態6に係わる信号処理器6Fの処理動作を説明するための図である。
【図17】この発明の実施の形態7に係わる信号処理器6Gの構成図である。
【図18】実施の形態7に係わる信号処理器6Gの処理動作を説明するための図である。
【図19】この発明の実施の形態8に係わる信号処理器6Hの構成図である。
【図20】実施の形態8に係わる信号処理器6Hの処理動作を説明するための図である。
【図21】この発明の実施の形態9に係わる信号処理器6Jの構成図である。
【図22】実施の形態9に係わる信号処理器6Jの処理動作を説明するための図である。
【図23】この発明の実施の形態10に係わる信号処理器6Kの構成図である。
【図24】実施の形態10に係わる信号処理器6Kの処理動作を説明するための図である。
【図25】この発明の実施の形態11に係わる信号処理器6Lの構成図である。
【図26】実施の形態11に係わる信号処理器6Lの処理動作を説明するための図である。
【図27】この発明の実施の形態12に係わる信号処理器6Mの構成図である。
【図28】実施の形態12に係わる信号処理器6Mの処理動作を説明するための図である。
【図29】この発明の実施の形態13に係わる信号処理器Nの構成図である。
【図30】実施の形態13に係わる信号処理器Nの処理動作を説明するための図である。
【図31】この発明の実施の形態14に係わる信号処理器6Pの構成図である。
【図32】実施の形態14に係わる信号処理器6Pの処理動作を説明するための図である。
【図33】この発明の実施の形態15に係わる信号処理器6Qの構成図である。
【図34】実施の形態15に係わる信号処理器6Qの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【図35】PDI処理の効果を説明するために図である(PDI処理回数=2回の場合)。
【図36】サンプル点と真のピーク位置の関係を説明するための図である。
【図37】距離補正量とΔ/Σ値Dとの関係(=Δ/Σ曲線)を説明するための図である。
【図38】この発明の実施の形態16に係わるレーダ装置の構成図である。
【図39】実施の形態16に係わる信号処理器6Rの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【図40】信号のピーク距離範囲算出を説明するための図である(PDI処理回数=2回の場合)。
【図41】この発明の実施の形態17に係わるレーダ装置の構成図である。
【図42】実施の形態17に係わる信号処理器6Sの処理動作を説明するための図の一部である(PDI処理回数=2回の場合)。
【図43】実施の形態17に係わる信号処理器6Sの処理動作を説明するための図の残りの部分である。
【図44】交互送信と連続送信の処理動作を説明するための図である。
【図45】この発明の実施の形態18に係わるレーダ装置の構成図である。
【図46】実施の形態18に係わる信号処理器6Tの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【符号の説明】
【0163】
1 空中線、2、2B、2C 送信機、3 チャープ信号発生器、4 送受切替器、5 受信機、6、6B、6C、6D、6E、6F、6G、6H、6J、6K、6L、6M、6N、6P、6Q、6R、6S、6T 信号処理器、7 表示器、11 パルス圧縮手段、12 測距手段、13、13B、13C 相対距離・相対速度算出手段、14、14B、14C、14D、14E、14F 位相補償手段、15 第2パルス圧縮手段、16 積分手段、17 速度算出手段、18、18B、18C レンジ補正手段、19、19B 平均相対速度算出手段、20、20B 基準相対速度・相対加速度算出手段、21 加速度補償手段、22 PDI手段、23、23B ディスクリ距離算出手段、24 ピーク距離範囲算出手段。
【技術分野】
【0001】
この発明は、パルス変調された電波を目標に向けて放射し、その目標により反射されて戻り受信された電波を受信信号とするレーダ装置に関するものである。
【背景技術】
【0002】
従来のレーダ装置は、パルス内が交互にアップチャープ変調とダウンチャープ変調を繰り返した送信信号を送信し、目標で反射してきた送信信号を受信信号として受信し、受信信号をディジタル複素ビデオ信号に変換する手段と、ディジタル複素ビデオ信号をドップラ補正し、かつパルス圧縮する複数の信号処理手段と、パルス圧縮により生成された信号の振幅をもとに、その信号のレンジ補正をする複数の補正手段と、レンジ補正されたパルス圧縮により生成された信号にコヒーレント積分を施して目標の検出を行う手段とを備えている。そして、複数のコヒーレント積分結果から振幅の最大値を検出することで、目標の検出性能を改善する(例えば、特許文献1参照)。
【0003】
このレーダ装置では、ドップラーレンジ補正量が異なる複数のパルス圧縮回路とコヒーレント積分器を利用するため、ノンコヒーレント積分に代表される振幅情報のみを用いる積分方式に比べ、信号対雑音電力比(Signal to Noise Ratio:SNR)の改善により、目標検出性能の改善が期待できる。
【0004】
【特許文献1】特開2000−275332号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、このレーダ装置では、予め目標を等速運動と想定しドップラーレンジ補正量が異なる複数のパルス圧縮回路とコヒーレント積分器を用意する必要があり、ハードウェアや処理量が増大するという問題がある。
また、想定外の運動目標に対する目標検出性能の改善は困難という問題がある。
【0006】
この発明の目的は、ハードウェアや処理量が少なく、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善を行うことのできるレーダ装置を提供することである。
【課題を解決するための手段】
【0007】
この発明に係わるレーダ装置は、キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、上記受信信号をパルス圧縮するパルス圧縮手段と、上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度または上記目標との相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、を有する。
【発明の効果】
【0008】
このように、目標との相対距離または目標との相対速度を求め、それらを用いてアップチャープ変調された送信信号が送受信されて得られた受信信号およびダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を算出し、その位相補償量を用いて受信信号の位相補償を行うので、予め運動を想定することが困難な高機動目標に対する目標検出性能の改善したレーダ装置を提供することができる。
【発明を実施するための最良の形態】
【0009】
実施の形態1.
この発明の実施の形態1に係わるレーダ装置は、図1に示すように、空中線1、送信機2、チャープ信号発生器3、送受切替器4、受信機5、信号処理器6、表示器7を備える。
チャープ信号発生器3は、アップチャープ信号およびダウンチャープ信号を生成し、送信機2に出力する。
送信機2は、キャリア信号を所定のパルス繰り返し周期でパルス変調し、さらにアップチャープ信号およびダウンチャープ信号に従ってパルス毎交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。
送受切替器4は、送信機2から入力された送信RF信号を空中線1に出力する。そして、空中線1から送信RF信号が空中に放射される。
【0010】
空中に放射された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射する。
そこで、空中線1は、入射してきた反射RF信号を受信し、受信RF信号として送受切替器4に出力する。
送受切替器4は、空中線1から入力された受信RF信号を受信機5に出力する。
受信機5は、送受切替器4から入力された受信RF信号を増幅、位相検波の後、受信ビデオ信号に変換し、信号処理器6に出力する。
【0011】
なお、パルス内がアップチャープ変調された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射し受信されて受信RF信号が生成され、その受信RF信号が受信ビデオ信号に変換されるが、以下の説明においては、この受信ビデオ信号をアップチャープ受信ビデオ信号と称す。
また、パルス内がダウンチャープ変調された送信RF信号は、目標で反射され、反射RF信号として空中線1に入射し受信されて受信RF信号が生成され、その受信RF信号が受信ビデオ信号に変換されるが、以下の説明においては、この受信ビデオ信号をダウンチャープ受信ビデオ信号と称す。
また、以下の説明において、時間間隔をパルス変調の所定のパルス繰り返し周期(Pulse Repetition Interval)と称し、PRIと略記する。
【0012】
この実施の形態1に係わる信号処理器6は、図1に示すように、パルス圧縮手段11、測距手段12、相対距離・相対速度算出手段13、位相補償手段14、第2パルス圧縮手段15、積分手段16、速度算出手段17を備えている。なお、位相補償手段14および第2パルス圧縮手段15をまとめて補償手段と称す。信号処理器6は、CPU、RAM、ROM、インターフェース回路を有するコンピュータから構成され、ROMに記憶されるプログラムに従ってCPUで演算処理が行われる。
【0013】
パルス圧縮手段11は、受信ビデオ信号をパルス圧縮する機能を有する。
測距手段12は、パルス圧縮手段11の出力であるパルス圧縮により生成された信号の強度に基づく距離を算出する機能を有する。
相対距離・相対速度算出手段13は、測距手段12で算出されたアップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対距離および目標との相対速度を算出する機能を有する。
位相補償手段14は、相対距離・相対速度算出手段13で算出された目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の目標までの距離が同一になるような位相補償量を算出し、その位相補償量を用いて受信ビデオ信号の位相補償を行う機能を有する。
第2パルス圧縮手段15は、位相補償手段14の出力である位相補償された受信ビデオ信号をパルス圧縮する機能を有する。
積分手段16は、第2パルス圧縮手段15の出力である位相補償された受信ビデオ信号をパルス圧縮することにより生成された信号を複数加算する機能を有する。
速度算出手段17は、積分手段16の出力である周波数スペクトルに対し、相対距離・相対速度算出手段13の出力である目標との相対速度から周波数の折り返しを考慮し、目標との相対速度を算出する機能を有する。
【0014】
次に、実施の形態1に係わる信号処理器6の処理動作について図2を参照して説明する。
パルス圧縮手段11は、入力されたA/D変換後の受信ビデオ信号V(n,m)と、送信RF信号の変調成分に対して複素共役の関係にある参照信号Ex(m、mτ)とを相関演算し、レンジ方向に分散した信号をパルス圧縮する。例えば、処理時間を短縮のため高速フーリエ変換(Fast Fourier Transform:FFT)を利用することができる。
【0015】
パルス圧縮手段11に入力される受信ビデオ信号V(n,m)は、式(1)で表される。この受信ビデオ信号V(n,m)は、n番目の送信RF信号に対するものである。ここで、ΔtはA/Dサンプリング周期、Mは1PRI間のサンプリング点数、Nはパルスヒット数、Aは送信RF信号の振幅、f0は送信中心周波数、Tpriはパルス繰り返し周期、cは光速、R0はn=1、m=1における目標までの初期相対距離、vは目標の相対速度、プラスマイナス記号のプラスはアップチャープ受信ビデオ信号のとき選択され、マイナスはダウンチャープ受信ビデオ信号のとき選択され、B0は送信帯域幅、T0は送信時間、mはm番目のサンプリング信号、Tp(=T0)はパルス幅である。
【0016】
【数1】
【0017】
また、パルス圧縮手段11で用いる参照信号Ex(m,mτ)は、式(2)で表される。ここで、マイナスプラス記号のマイナスはアップチャープ受信ビデオ信号をパルス圧縮するとき選択され、プラスはダウンチャープ受信ビデオ信号をパルス圧縮するとき選択され、mτΔtは各パルスでの任意の時間シフトを表す。
【0018】
【数2】
【0019】
パルス圧縮手段11は、パルス圧縮として、式(1)で表された受信ビデオ信号V(n,m)と、式(2)で表された参照信号Ex(m,mτ)との相関演算結果RV・Ex(n,mτ)を式(3)に従って算出する。パルス圧縮することにより生成された信号とは、この相関演算結果RV・Ex(n,mτ)のことである。
【0020】
【数3】
【0021】
移動している目標からの反射RF信号を受信した場合、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す目標移動の影響を受けた目標までの距離とダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す目標移動の影響を受けた目標までの距離が、真の目標との相対距離R0に対して異なる方向に変化する。以下の説明において、この現象を距離シフトと記述する。
測距手段12は、パルス圧縮手段11の出力であるn回目に受信された受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離Rpeak(n)を、式(4)に従って算出する。
【0022】
【数4】
【0023】
ここで、max_R(RV・Ex(n,mτ))は、相関演算結果RV・EX(n,mτ)の振幅が最大を示す距離シフトした目標までの距離を表す。
【0024】
相対距離・相対速度算出手段13は、測距手段12で算出されたアップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差から目標との相対距離および目標との相対速度を算出する。
ここでは、目標までのn=1、m=1における初期相対距離R0と、アップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離との距離差ΔRu、ΔRdの導出について説明する。この説明するΔRu、ΔRdは、相対距離・相対速度算出手段13で、目標との相対距離または目標との相対速度を算出する際に用いられる。
相関演算の式(3)の中のビデオ信号V(n,m)と参照信号Ex(m,mτ)の積は、式(3)の1/c2、Δt2、mτ2Δt2を含む項がexp(j0)すなわち1に近似できるので、式(5)に書き換えることができる。
【0025】
【数5】
【0026】
式(5)のmτΔtが式(6)の関係が成り立つ時、式(3)の中のV(n,m)・Ex(m,mτ)は式(7)のように表される。そして、式(3)の相関演算結果RV・Ex(n,mτ)の振幅が最大をとることが分かる。
【0027】
【数6】
【0028】
また、式(6)より、目標までのn=1、m=1における初期相対距離
R0(=R0−v(n−1)Tpri)と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差ΔRu、ΔRdは、近似的に式(8)で表わされる。
【0029】
【数7】
【0030】
ただし、ΔT=(T0/B0)・f0とする。
また、式(8)で求めた目標までの初期相対距離R0と距離シフトした目標までの距離の差ΔRu、ΔRdと目標との相対速度vの関係式を用いて、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ruとダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rdは、近似的に式(9)で表わされる。図3には、その様子を図示する。
【0031】
【数8】
【0032】
同時刻にパルス内がアップチャープ変調された送信RF信号とダウンチャープ変調された送信RF信号とが送信されるときは、アップチャープ受信ビデオ信号とダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ru、rdを用いて、式(10)、式(11)により、目標との相対距離R’0、相対速度v’を算出することができる。算出した目標との相対距離R’0と相対速度v’は、真の目標との相対距離と相対速度と区別するために、サフィックスをつけて表記している。
【0033】
【数9】
【0034】
しかし、この発明では、PRI毎にパルス内がアップチャープ変調された送信信号とダウンチャープ変調された送信信号を交互に繰り返し送信されているので、PRI間の目標移動によって測距・測速度精度が劣化するという問題がある。
そこで、この発明では、1PRI間の目標移動を考慮することにより、精度の高い目標との相対距離と目標との相対速度の算出を実現する。図4には、1PRI間の目標移動を考慮した場合のパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離を示す。
アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離ru、1PRI後に送信したダウンチャープ変調された送信信号に係わるダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rdは、近似的に式(12)で表される。
【0035】
【数10】
【0036】
また、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離rd、1PRI後に送信したアップチャープ変調された送信信号に係わるアップチャープ受信ビデオ信号をパルス圧縮することにより生成された距離シフトした信号の振幅が最大を示す目標までの距離ruは、近似的に式(13)で表される。
【0037】
【数11】
【0038】
したがって、相対距離・相対速度算出手段13では、式(10)、式(11)に代えて、式(14)、式(15)により1PRI間の目標移動を考慮した目標との相対距離R’0、目標との相対速度v’を算出する。式(14)における目標との相対速度v’は、式(15)に従い算出した目標との相対速度v’を用いる。式(15)におけるマイナスプラス記号は、アップチャープ受信ビデオ信号からダウンチャープ受信ビデオ信号に変化するときマイナス、ダウンチャープ受信ビデオ信号からアップチャープ受信ビデオ信号に変化するときプラスが選択される。
式(14)、(15)におけるru、rdは、測距手段12の出力であるアップチャープ受信ビデオ信号、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離Rpeak(n)から選択される。
【0039】
【数12】
【0040】
以下、PRI毎に式(14)、(15)で算出される目標との相対距離をR’(n)、目標との相対速度をv’(n)と記述し、nはn=1,2、・・・、(N−1)とする。
位相補償手段14は、PRI毎に相対距離・相対速度算出手段13から入力される目標との相対速度v’(n)を用いて、アップチャープ受信ビデオ信号およびダウンビデオ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように式(16)を用いて位相補償量φcor(n,m)を算出する。そして、位相補償手段14は、位相補償量φcor(n,m)を用いて受信ビデオ信号V(n,m)の位相補償を式(17)に従って行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0041】
【数13】
【0042】
ここで、マイナスプラス記号は、位相補償される受信ビデオ信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
第2パルス圧縮手段15は、位相補償手段14の出力である位相補償後の受信ビデオ信号V’(n,m)を、式(18)を用いてパルス圧縮手段11と同様に、パルス圧縮を行い、パルス圧縮により生成された信号R’V・Ex(n,mτ)を出力する。
【0043】
【数14】
【0044】
このような処理を行うことによって、図5に示すように位相補償されたアップチャープ受信ビデオ信号とダウンチャープビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になる。
【0045】
積分手段16は、パルス間での積分を行うものであり、第2パルス圧縮手段15の出力であるパルス圧縮することにより生成された信号R’V・Ex(n,mτ)を入力とし、例えば、高速フーリエ変換処理等を行い、レンジビン毎の信号成分、即ち、周波数スペクトルF(k,mτ)を式(19)に従って求めることにより、各周波数ビンの積分を行う。
【0046】
【数15】
【0047】
ここで、kは周波数ビン番号、FFT_numはFFTポイント数を表す。(N−1)がFFTポイント数未満の場合は、R’V・Ex(n,mτ)に0を補充する。
【0048】
速度算出手段17は、積分手段16の出力である周波数スペクトルに対し、相対距離・相対速度算出手段13の出力である目標との相対速度から周波数の折り返しを考慮して、高精度な目標との相対速度を求める。
速度算出手段17は、式(20)を用いて速度帯域vbandを算出する。また、速度算出手段17は、式(21)を用いて周波数ビンの速度分解能Δvを算出する。
【0049】
【数16】
【0050】
また、速度算出手段17は、式(20)、式(21)に基づき、周波数の折り返しを考慮した各周波数ビンの速度vbin(k)を式(22)を用いて求める。したがって、FFTポイント数を多くすることにより、より速度分解能を上げることが可能になる。
【0051】
【数17】
【0052】
ここで、floor(X)は、Xを超えない最大の整数を示す。
また、相対距離・相対速度算出手段13の出力である目標との相対速度に代えて、平均相対速度算出手段19の出力である複数の目標との相対速度の平均相対速度v(バー)が入力される場合は、式(22)中のv’(1)に代えて、v(バー)を用いる。同様に、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度v(ハット)0が入力される場合は、式(22)中のv’(1)に代えて、v(ハット)0を用いる。
速度算出手段17は、周波数スペクトルと周波数の折り返しを考慮した各周波数ビンの速度を表示器7に出力する。
表示器7は、速度算出手段17からの周波数スペクトルと周波数の折り返しを考慮した各周波数ビンの速度を表示する。
【0053】
このように、実施の形態1に係わるレーダ装置は、受信ビデオ信号をパルス圧縮するパルス圧縮手段11と、パルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離を算出する測距手段12と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す距離シフトした目標までの距離の差と1PRI間の目標移動を考慮して目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段13と、受信ビデオ信号の位相補償を行うことにより、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、目標との相対速度を用いて位相補償量を算出し、その位相補償量を用いて受信ビデオ信号の位相を補償する位相補償手段14と、位相補償された受信ビデオ信号をパルス圧縮する第2パルス圧縮手段15と、第2パルス圧縮手段15でパルス圧縮することにより生成された信号を複数加算する積分手段16と、積分手段16からの出力である周波数スペクトルに対して周波数の折り返しを考慮して目標との相対速度を算出する速度算出手段17と、を有するので、従来のように予めある程度目標の運動を想定し、ドップラ−レンジ補正量が異なる複数のパルス圧縮回路を用意せず、目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0054】
実施の形態2.
この発明の実施の形態2に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態2に係わる信号処理器6Bは、図6に示すように、実施の形態1に係わる信号処理器6の位相補償手段14および第2パルス圧縮手段15の代わりに補償手段としてのレンジ補正手段18を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0055】
実施の形態2に係わるレンジ補正手段18は、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
次に、実施の形態2に係わる信号処理器6Bの処理動作について図7を参照して説明する。
レンジ補正手段18は、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、式(23)に従って、レンジ補正量Rcor(n)を算出する。
【0056】
【数18】
【0057】
ここで、v’(n)はn回目の測速度結果を示す。プラスマイナス記号は、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号をレンジ補正する場合プラス、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号をレンジ補正する場合マイナスが選択される。
また、レンジ補正手段18は、式(24)を用いて、レンジ補正量Rcor(n)をレンジビン単位で表すレンジ補正量Rcor_bin(n)に変換する。
【0058】
【数19】
【0059】
ここで、Δr(=cΔt/2)はサンプリング間隔を表す。
そして、レンジ補正手段18は、算出されたレンジ補正量Rcor_bin(n)を用いて、式(25)に従って、パルス圧縮することにより生成された信号RV・Ex(n,mτ)のレンジ補正を行い、レンジ補正された信号RV・Ex_cor(n,mτ)を出力する。このような処理を行うことによって、図8に示すように、パルス圧縮により生成され、レンジ補正された信号の振幅が最大を示す目標までの距離を同一にすることができる。
【0060】
【数20】
【0061】
このように、実施の形態2に係わるレーダ装置は、実施の形態1に係わる位相補償手段14および第2パルス圧縮手段15に代えて、相対距離・相対速度算出手段13の出力である目標との相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、そのレンジ補正量を用いてパルス圧縮することにより生成された信号のレンジ補正を行うレンジ補正手段18を備えたので、受信ビデオ信号に対するパルス圧縮が1回で済み、構成が簡易化され、且つ、目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0062】
実施の形態3.
この発明の実施の形態3に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態3に係わる信号処理器6Cは、図9に示すように、実施の形態1に係わる信号処理器6に平均相対速度算出手段19が追加され、位相補償手段14Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0063】
平均相対速度算出手段19は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度が入力され、全測速度((パルス数−1)分)結果から平均相対速度を算出する機能を有する。
次に、実施の形態3に係わる信号処理器6Cの処理動作について図10を参照して説明する。
平均相対速度算出手段19は、式(26)に従って、目標との(パルス数−1)分の相対速度v’(n)を用いて、平均相対速度v(バー)を算出する。算出された平均相対速度v(バー)は、各パルスの受信ビデオ信号の位相の補償に用いる。
【0064】
【数21】
【0065】
位相補償手段14Bは、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(27)に従って位相補償量φcor(n,m)を算出する。そして、位相補償手段14Bは、位相補償量φcor(n,m)を用いて、式(28)に従って、受信ビデオ信号の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0066】
【数22】
【0067】
ここで、マイナスプラス記号は、位相補償される信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
【0068】
このように、実施の形態3に係わるレーダ装置は、(パルス数−1)分の測速度結果の平均相対速度を算出する平均相対速度算出手段19を備えたので、パルス毎の測速度を用いて位相補償を行ったときには測速度の誤差により、位相補償精度が低下する可能性があるが、平均相対速度を用いることにより安定した位相補償精度を保つことができ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0069】
実施の形態4.
この発明の実施の形態4に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Dが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態4に係わる信号処理器6Dは、図11に示すように、実施の形態3に係わる信号処理器6Cの平均相対速度算出手段19の代わりに基準相対速度・相対加速度算出手段20を有し、位相補償手段14Cが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0070】
基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度を入力とし、全測速度((パルス数−1)分)結果から、最小二乗法により目標との基準相対速度と相対加速度を算出する機能を有する。
次に、実施の形態4に係わる信号処理器6Dの処理動作について図12を参照して説明する。
基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である目標との複数の相対速度v’(n)を入力とし、全測速度((パルス数−1)分)結果から、最小二乗法により目標との基準相対速度と相対加速度を算出する。
時間tn(=(n−1)Tpri)の速度v(ハット)(n)は、目標との相対加速度a(ハット)、1回目のパルス送信からの経過時間tn、および目標との基準相対速度v(ハット)0とを用いると、式(29)で表される。
【0071】
【数23】
【0072】
そこで、基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度v’(n)を用いて、式(30)と式(31)とに従い、最小二乗法により、目標との相対加速度a(ハット)と目標との基準相対速度v(ハット)0を算出する。
【0073】
【数24】
【0074】
位相補償手段14Cは、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)、目標との基準相対速度v(ハット)0を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(32)に従い、位相補償量φcor(n,m)を算出する。そして、位相補償手段14Cは、位相補償量φcor(n,m)を用いて、式(33)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’a(n,m)を出力する。
【0075】
【数25】
【0076】
ここで、マイナスプラス符号は、位相補償される受信ビデオ信号が、アップチャープ受信ビデオ信号の場合マイナス、ダウンチャープ受信ビデオ信号の場合プラスが選択される。
【0077】
このように、実施の形態4に係わるレーダ装置は、(パルス数−1)分の測速度結果から最小二乗法により目標との基準相対速度、相対加速度を算出する基準相対速度・相対加速度算出手段20と、受信ビデオ信号V(n,m)に対し、加速度を考慮した位相補償を行い、加速度を含めた位相補償後の信号V’a(n,m)を出力する位相補償手段14Cを備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0078】
実施の形態5.
この発明の実施の形態5に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Eが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態5に係わる信号処理器6Eは、図13に示すように、実施の形態3に係わる信号処理器6Cと平均相対速度算出手段19Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態5に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との平均相対速度を算出する機能を有する。
【0079】
次に、実施の形態5に係わる信号処理器6Eの処理動作について図14を参照して説明する。
平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離から、最小二乗法により目標との平均相対速度を算出する。
平均相対速度算出手段19Bは、目標との相対距離R’(n)の1回目の測距結果R’(1)を基準とした相対距離r’(n)を、式(34)に従って算出する。
【0080】
【数26】
【0081】
なお、時間tn(=(n−1)Tpri)での目標との相対距離r(ハット)’(n)は、1回目のパルス送信からの経過時間tnと目標との初期相対距離r(ハット)1’を用いると、目標との平均相対速度v(バー)と式(35)の関係が成り立つ。
【0082】
【数27】
【0083】
そこで、平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である測距結果R’(n)を用いて、式(34)と式(36)に従い、目標との平均相対速度v(バー)を算出する。
【0084】
【数28】
【0085】
このように、実施の形態5に係わるレーダ装置は、(パルス数−1)分の測距結果から平均相対速度を算出する平均相対速度算出手段19Bを備えたので、パルス毎の測速度に基づいて位相補償を行うとき測速度誤差により位相補償精度が低下する可能性があるが、平均相対速度を用いて位相補償を行うので、安定した位相補償精度を保つことができ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0086】
実施の形態6.
この発明の実施の形態6に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Fが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態6に係わる信号処理器6Fは、図15に示すように、実施の形態3に係わる信号処理器6Cの位相補償手段14Bおよび第2パルス圧縮手段15の代わりにレンジ補正手段18Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態6に係わるレンジ補正手段18Bは、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように受信ビデオ信号のパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
【0087】
次に、実施の形態6に係わる信号処理器6Fの処理動作について図16を参照して説明する。
レンジ補正手段18Bは、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、式(37)に従い、レンジ補正量Rcor(n)を算出する。
【0088】
【数29】
【0089】
ここで、プラスマイナス記号は、レンジ補正される信号が、アップチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の場合プラス、ダウンチャープ受信ビデオ信号をパルス圧縮することにより生成された信号の場合マイナスが選択される。
そして、レンジ補正手段18Bは、算出されたレンジ補正量Rcor(n)を用いて、式(24)、式(25)に従い、受信ビデオ信号をパルス圧縮することにより生成された信号RV・Ex(n,mτ)に対しレンジ補正を行い、レンジ補正後の信号RV・Ex_cor(n,mτ)を出力する。
【0090】
このように、実施の形態6に係わるレーダ装置は、実施の形態3の位相補償手段14Bおよび第2パルス圧縮手段15に代えて、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、パルス圧縮することにより生成された信号に対してレンジ補正を行うレンジ補正手段18Bを備えたので、パルス毎の測速度を用いてレンジ補正を行うとき測速度誤差によりレンジ補正精度が低下する可能性があるが、平均相対速度を用いてレンジ補正を行うので、安定したレンジ補正精度を保つことができ、受信ビデオ信号に対してパルス圧縮が1回で済み、構成が簡易化され、かつ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0091】
実施の形態7.
この発明の実施の形態7に係わるレーダ装置は、実施の形態6に係わるレーダ装置と信号処理器6Gが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態7に係わる信号処理器6Gは、図17に示すように、実施の形態6に係わる信号処理器6Fと平均相対速度算出手段19Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態7に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との平均相対速度を算出する機能を有する。
【0092】
次に、実施の形態7に係わる信号処理器6Gの処理動作について図18を参照して説明する。
実施の形態7に係わる平均相対速度算出手段19Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離R’(n)を用いて、式(34)、式(36)に従い、目標との平均相対速度v(バー)を算出する。
【0093】
このように、実施の形態7に係わるレーダ装置は、複数のパルスでの目標との相対距離から算出された平均相対速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるようにレンジ補正量を算出し、パルス圧縮することにより生成された信号に対してレンジ補正を行うレンジ補正手段18Bを備えたので、パルス毎の測速度を用いてレンジ補正を行うとき測速度誤差によりレンジ補正精度が低下する可能性があるが、平均相対速度を用いてレンジ補正することにより安定したレンジ補正精度を保つことができ、受信ビデオ信号に対してパルス圧縮が1回で済み、構成が簡易化され、かつ、安定した目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0094】
実施の形態8.
この発明の実施の形態8に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Hが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態8に係わる信号処理器6Hは、図19に示すように、実施の形態1に係わる信号処理器6と位相補償手段14Dが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態8に係わる位相補償手段14Dは、相対距離・相対速度算出手段13からの出力である目標との相対距離および目標との相対速度を用いて、位相補償量を求め、位相補償を行う機能を有する。
【0095】
次に、実施の形態8に係わる信号処理器6Hの処理動作について図20を参照して説明する。
位相補償手段14Dは、PRI毎に相対距離・相対速度算出手段13から入力される目標との相対距離R’(n)および目標との相対速度v’(n)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(38)に従い、位相補償量φcor(n,m)を算出する。それから、位相補償手段14Dは、位相補償量φcor(n,m)を用いて、式(39)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0096】
【数30】
【0097】
ここで、プラスマイナス記号、マイナスプラス記号は、位相補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0098】
このように、実施の形態8に係わるレーダ装置は、受信ビデオ信号を位相補償する補償項に目標との相対距離を含めたことによって、目標との相対距離の大きさによらず、積分効果と測速度の改善、すなわち、長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0099】
実施の形態9.
この発明の実施の形態9に係わるレーダ装置は、実施の形態3に係わるレーダ装置と信号処理器6Jが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態9に係わる信号処理器6Jは、図21に示すように、実施の形態3に係わる信号処理器6Cと位相補償手段14Eが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態9に係わる位相補償手段14Eは、相対距離・相対速度算出手段13からの出力である目標との相対距離と、平均相対速度算出手段19の出力である目標との平均相対速度を用いて、位相補償量を求め、位相補償を行う機能を有する。
【0100】
次に、実施の形態9に係わる信号処理器6Jの処理動作について図22を参照して説明する。
位相補償手段14Eは、相対距離・相対速度算出手段13の出力である目標との相対距離R’(n)と、平均相対速度算出手段19の出力である目標との平均相対速度v(バー)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(40)に従い、位相補償量φcor(n,m)を算出する。そして、位相補償手段14Eは、位相補償量φcor(n,m)を用いて、式(41)に従い、受信ビデオ信号の位相補償を行い、位相補償後の受信ビデオ信号V’(n,m)を出力する。
【0101】
【数31】
【0102】
ここで、プラスマイナス記号、マイナスプラス記号は、位相補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0103】
このように、実施の形態9に係わるレーダ装置は、受信ビデオ信号を位相補償する補償項に目標との相対距離を含め、且つ、(パルス数−1)分の測速度結果の平均相対速度を算出する平均相対速度算出手段19を備えたので、目標との相対距離の大きさによらず、且つ、パルス毎の測速度結果の誤差によらず、安定した位相補償精度を保つことができ、長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0104】
実施の形態10.
この発明の実施の形態10に係わるレーダ装置は、実施の形態9に係わるレーダ装置と信号処理器6Kが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態10に係わる信号処理器6Kは、図23に示すように、実施の形態9に係わる信号処理器6Jの平均相対速度算出手段19の代わりに基準相対速度・相対加速度算出手段20を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態10に係わる基準相対速度・相対加速度算出手段20は、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対速度が入力され、全測速度((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
実施の形態10に係わる位相補償手段14Fは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度および目標との相対加速度と、相対距離・相対速度算出手段13の出力である目標との相対距離とが入力され、目標との相対距離、目標との基準相対速度および目標との相対加速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、位相補償量を求め、受信ビデオ信号の位相補償を行う機能を有する。
【0105】
次に、実施の形態10に係わる信号処理器6Kの処理動作について図24を参照して説明する。
基準相対速度・相対加速度算出手段20は、実施の形態4に係わる基準相対速度・相対加速度算出手段20と同様に、式(30)、式(31)に従い、目標との相対加速度と目標との基準相対速度を算出する。
【0106】
位相補償手段14Fは、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)、目標との基準相対速度v(ハット)0と、相対距離・相対速度算出手段13の出力である目標との相対距離R’(n)を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、式(42)に従い位相補償量φcor(n,m)を算出する。そして、位相補償手段14Fは、位相補償量φcor(n,m)を用いて、式(43)に従い、受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の受信ビデオ信号V’a(n,m)を出力する。
【0107】
【数32】
【0108】
ここで、プラスマイナス記号、マイナスプラス記号は、補償される受信ビデオ信号がアップチャープ受信ビデオ信号の場合、上の符号、ダウンチャープ受信ビデオ信号の場合、下の符号が選択される。
【0109】
このように、実施の形態10に係わるレーダ装置は、(パルス数−1)分の測速度結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20と、目標との相対距離、目標との基準相対速度および目標との相対加速度を考慮して受信ビデオ信号V(n,m)の位相補償を行い、位相補償後の信号V’a(n,m)を出力する位相補償手段14Fを備えたので、加速度を有する長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0110】
実施の形態11.
この発明の実施の形態11に係わるレーダ装置は、実施の形態4に係わるレーダ装置と信号処理器6Lが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態11に係わる信号処理器6Lは、図25に示すように、実施の形態4に係わる信号処理器6Dの位相補償手段14および第2パルス圧縮手段15の代わりにレンジ補正手段18Cおよび加速度補償手段21を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0111】
実施の形態11に係わるレンジ補正手段18Cは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度と目標との相対加速度を用いて、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように受信ビデオ信号のパルス圧縮により生成された信号のレンジ補正を行う機能を有する。
実施の形態11に係わる加速度補償手段21は、レンジ補正手段18Cの出力であるレンジ補正後の信号に対し、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度を用いて、加速度補償を行う機能を有する。
【0112】
次に、実施の形態11に係わる信号処理器6Lの処理動作について図26を参照して説明する。
レンジ補正手段18Cは、基準相対速度・相対加速度算出手段20の出力である目標との基準相対速度v(ハット)0と目標との相対加速度a(ハット)を用いて、式(44)に従い、レンジ補正量Rcor(n)を算出する。
【0113】
【数33】
【0114】
ここで、v(ハット)(n)は式(29)に従い算出する。また、プラスマイナス記号は、レンジ補正がアップチャープ受信ビデオ信号のパルス圧縮により生成された信号に対して行うときプラス、ダウンチャープ受信ビデオ信号のパルス圧縮により生成された信号に対して行うときマイナスが選択される。
そして、レンジ補正手段18Cは、算出されたレンジ補正量Rcor(n)を用いて、式(24)、式(25)に従い、パルス圧縮により生成された信号RV・Ex(n,mτ)のレンジ補正を行い、レンジ補正後の信号RV・Ex_cor(n,mτ)を出力する。
【0115】
加速度補償手段21は、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度a(ハット)を用いて、式(45)に従い、レンジ補正手段18Cの出力であるレンジ補正されたパルス圧縮により生成された信号RV・Ex_cor(n,mτ)に対して加速度補償を行い、加速度補償後の信号R’V・Ex_cor(n,mτ)を出力する。
【0116】
【数34】
【0117】
このように、実施の形態11に係わるレーダ装置は、全測速度((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と相対加速度を算出する基準相対速度・相対加速度算出手段20と、アップチャープ受信ビデオ信号およびダウンチャープ受信ビデオ信号それぞれをパルス圧縮することにより生成された信号の振幅が最大を示す目標までの距離が同一になるように、目標との基準相対速度と目標との相対加速度を用いてレンジ補正を行うレンジ補正手段18Cと、基準相対速度・相対加速度算出手段20の出力である目標との相対加速度を用いて、レンジ補正されたパルス圧縮により生成された信号に対し、加速度を有する移動目標に対する目標検出性能と相対速度計測精度の劣化を防ぐ加速度補償を行う加速度補償手段21を備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。また、実施の形態10と比べ、パルス圧縮を2回行う必要がなく、構成が簡素になり、処理時間の短縮も可能となる。
【0118】
実施の形態12.
この発明の実施の形態12に係わるレーダ装置は、実施の形態11に係わるレーダ装置と信号処理器6Mが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態12に係わる信号処理器6Mは、図27に示すように、実施の形態11に係わる信号処理器6Lと基準相対速度・相対加速度算出手段20Bが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
【0119】
実施の形態12に係わる基準相対速度・相対加速度算出手段20Bは、パルス毎の相対距離・相対速度算出手段13の出力である複数の目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0120】
次に、実施の形態12に係わる信号処理器6Mの処理動作について図28を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離から、最小二乗法により目標との基準相対速度と目標との相対加速度を算出する。
基準相対速度・相対加速度算出手段20Bは、目標との相対距離R’(n)の1回目の測距結果R’(1)を基準とした相対距離r’(n)を、式(46)に従って算出する。
【0121】
【数35】
【0122】
a(ハット)を目標との相対加速度、tnを1回目のパルス送信からの経過時間、v(ハット)0を目標との基準相対速度、r(ハット)’1をR’(1)を基準とした目標との初期相対距離とすると、時間tn(=(n−1)Tpri)の距離r(ハット)’nは式(47)で表される。
【0123】
【数36】
【0124】
式(48)より、最小二乗法の入力を得る。
【0125】
【数37】
【0126】
各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0127】
【数38】
【0128】
このように、実施の形態12に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を持つ移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態10と比べ、パルス圧縮を2回行う必要がなく、構成が簡素になり、処理時間の短縮も可能となる。
【0129】
実施の形態13.
この発明の実施の形態13に係わるレーダ装置は、実施の形態4に係わるレーダ装置と信号処理器6Nが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態13に係わる信号処理器6Nは、図29に示すように、実施の形態4に係わる信号処理器6Dの基準相対速度・相対加速度算出手段20の代わりに基準相対速度・相対加速度算出手段20Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態13に係わる基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0130】
次に、実施の形態13に係わる信号処理器6Nの処理動作について図30を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、実施の形態12に係わる基準相対速度・相対加速度算出手段20Bと同様に、各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0131】
このように、実施の形態13に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を有する移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0132】
実施の形態14.
この発明の実施の形態14に係わるレーダ装置は、実施の形態10に係わるレーダ装置と信号処理器6Pが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。そして、実施の形態14に係わる信号処理器6Pは、図31に示すように、実施の形態10に係わる信号処理器6Kの基準相対速度・相対加速度算出手段20の代わりに基準相対速度・相対加速度算出手段20Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記して説明は省略する。
実施の形態14に係わる基準相対速度・相対加速度算出手段20Bは、相対距離・相対速度算出手段13の出力である複数のパルスでの目標との相対距離が入力され、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度と目標との相対加速度を算出する機能を有する。
【0133】
次に、実施の形態14に係わる信号処理器6Pの処理動作について図32を参照して説明する。
基準相対速度・相対加速度算出手段20Bは、実施の形態12に係わる基準相対速度・相対加速度算出手段20Bと同様に、各行列を式(49)、式(50)、式(51)とし、式(52)に従って逆行列を両辺に左側から乗算することによって、X、すなわち、目標との基準相対速度と相対加速度を得る。
【0134】
このように、実施の形態14に係わるレーダ装置は、全測距離((パルス数−1)分)結果から最小二乗法により目標との基準相対速度および目標との相対加速度を算出する基準相対速度・相対加速度算出手段20Bを備えたので、加速度を有する長距離の移動目標に対する目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
【0135】
実施の形態15.
この発明の実施の形態15に係わるレーダ装置は、実施の形態1に係わるレーダ装置と信号処理器6Qが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態15に係わる信号処理器6Qは、図33に示すように、実施の形態1に係わる信号処理器6にPDI手段22が追加され、また、測距手段12の代わりにディスクリ距離算出手段23を有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0136】
次に、実施の形態15に係わる信号処理器6Qの処理動作について図34を参照して説明する。ただし、Post Detection Integration(以下、「PDI」と称す)処理の回数を2回としている。
図35に示すように、低S/N環境では、雑音の振幅がパルス圧縮により生成された信号の振幅より大きくなり、雑音までの距離をパルス圧縮により生成された信号の距離として誤って算出する可能性がある。そのため、PDI手段22は、パルス圧縮により生成された信号に対しPDI処理を行い、雑音の影響を低減させる。
PDI手段22にはパルス圧縮により生成された信号が入力され、同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮により生成された信号に対して、式(53)に従い、PDI処理を行い、PDI処理により生成された信号RPDI(n,mτ)を出力する。ここで、NPDIはPDI処理回数を示す。
【0137】
【数39】
【0138】
A/Dサンプリング周波数が低い場合、測距手段12では、図36に示すように必ずしもパルス圧縮により生成された信号の振幅が最大を示す距離シフトした目標までの距離またはPDI処理により生成された信号の振幅が最大を示す目標までの距離をサンプリングするとは限らない。
測距手段12では、高精度に距離算出精度を行うためにA/Dサンプリング周波数を高くする必要があった。そこで、測距手段12に代えて、ディスクリ距離算出手段23は、A/Dサンプリング周波数が低い場合のパルス圧縮により生成された信号またはPDI処理により生成された信号の距離算出精度を向上するためにディスクリ距離算出処理を用いる。
この処理は、入力された信号から振幅の大きい隣接する2信号を取り出し、それらの振幅値の差(Δ)を、それらの2信号の和(Σ)で割った値をΔ/Σ値として生成する。このΔ/Σ値と、予め求めたΔ/Σ値と図36に示す距離補正量との関係に基づいて、生成したΔ/Σ値に相当する距離補正量RΔ/Σ_corを算出し、その距離補正量RΔ/Σ_corで補正した距離を真の入力された信号の目標までの距離として算出し、距離を求めるものである。以下、ディスクリ距離算出処理の具体的な処理内容を示す。
【0139】
ディスクリ距離算出手段23には、PDI処理により生成された信号RPDI(n,mτ)が入力される。次に、ディスクリ距離算出手段23は、図36の入力された信号の振幅が最大を示す距離RΔ/Σと各サンプル点(Ri,Ri)(i=a,b,c,d)との関係に示すように距離の真値が信号の振幅の大きい隣接する2点(Rb,Pb)、(Rc,Pc)の間にあるものと仮定し、式(54)に従い、Δ/Σ値Dを算出する。ただし、図中の丸印はサンプル点、Piはサンプル点に対する振幅値、Riはサンプル点に対する距離を示している。
【0140】
【数40】
【0141】
次に、図37に示すような予め精度良く算出された距離補正量とΔ/Σ値Dとの関係(=Δ/Σ曲線)から、距離補正量RΔ/Σ_corを求めることで、真の入力された信号の振幅が最大を示す距離RΔ/Σを式(55)により算出する。以下の説明において、振幅が最大を示す距離をピーク距離と記述する。
【0142】
【数41】
【0143】
相対距離・相対速度算出手段13は、ディスクリ測距手段23が出力するRΔ/ΣをRpeak(n)として入力する。そして、相対距離・相対速度算出手段13は、実施の形態1と同様に、式(14)、式(15)に従い、目標との相対距離と目標との相対速度を算出する。
【0144】
このように、実施の形態15に係わるレーダ装置は、PDI処理により生成された信号を出力するPDI手段22を備えたので、雑音をパルス圧縮により生成された信号の振幅が最大を示す距離シフトした目標までの距離と誤って選択することがなくなり、また、実施の形態1に係わる測距手段12に代えて、ディスクリ測距手段23を備えたので、低いA/Dサンプリング周波数でも高精度にパルス圧縮により生成された信号のピーク距離を算出することができ、かつ、ハードウエア規模が縮小され、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態2から14の場合も、PDI手段22を追加し、測距手段12の代わりにディスクリ距離算出手段23を用いることにより、同様な効果を得ることが可能になる。
【0145】
実施の形態16.
この発明の実施の形態16に係わるレーダ装置は、実施の形態15に係わるレーダ装置と信号処理器6Rが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態16に係わる信号処理器6Rは、図38に示すように、実施の形態15に係わる信号処理器6Qにピーク距離範囲算出手段24と第2ディスクリ距離算出手段23Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0146】
次に、実施の形態16に係わる信号処理器6Rの処理動作について図39を参照して説明する。ただし、PDI処理回数を2回としている。
ピーク距離範囲算出手段24には、PDI処理により生成された信号のピーク距離RΔ/Σが入力される。
図40に示すように、ピーク距離範囲算出手段24は、ディスクリ距離算出手段23から入力されるPDI処理により生成された信号のピーク距離RΔ/Σを中心にして、予め設定したピーク距離を求める設定範囲gateを用いて、式(56)に従い、ピーク距離を求める範囲の上限gateupを算出する。また、ピーク距離範囲算出手段24は、ディスクリ距離算出手段23から入力されるPDI処理により生成された信号のピーク距離RΔ/Σを中心にして、予め設定したピーク距離を求める設定範囲gateを用いて、式(57)に従い、ピーク距離を求める範囲の下限gatedownを算出する。
【0147】
【数42】
【0148】
第2ディスクリ距離算出手段23Bは、式(56)と式(57)で算出したピーク距離を求める範囲内で、式(54)と式(55)に従い、各パルスのパルス圧縮により生成された信号のピーク距離Rpeak(n,mτ)を算出する。したがって、図40に示すように、ピーク距離を求める範囲を限定することにより、誤って雑音を選択することがなくなり、各パルスのパルス圧縮により生成された信号のピーク距離算出精度の向上が可能になる。
【0149】
このように、実施の形態16に係わるレーダ装置は、ピーク距離を求める範囲を算出するピーク距離範囲算出手段24と、ピーク距離範囲内でピーク距離を算出する第2ディスクリ距離算出手段23Bを備えたので、誤って雑音を選択することがなくなり、ピーク距離算出精度の向上が可能になり、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態1から14の場合も、PDI手段22を追加し、測距手段12の代わりにディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23Bを用いることにより、同様な効果を得ることが可能になる。
【0150】
実施の形態17.
この発明の実施の形態17に係わるレーダ装置は、実施の形態16に係わるレーダ装置と送信機2B、信号処理器6Sが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態17に係わる信号処理器6Sは、図41に示すように、実施の形態16に係わる信号処理器6Rに、PDI手段22の代わりにPDI手段22Bと、相対距離・相対速度算出手段13の代わりに相対距離・相対速度算出手段13Bを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0151】
次に、実施の形態17に係わる信号処理器6Sの処理動作について図42と図43を参照して説明する。ただし、PDI処理回数を2回としている。
送信機2Bは、キャリア信号をPRI毎にパルス変調し、連続した複数パルス毎に交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。例えば、PDI処理回数が2回に設定された場合は、図42と図43のように、1回目と2回目のパルス変調された信号のパルスに対してはアップチャープ変調を行い、3回目と4回目のパルス変調された信号のパルスに対してはダウンチャープ変調を行い、5回目と6回目のパルス変調された信号のパルスに対してはアップチャープ変調を行う。送信機2Bは、この操作を繰り返して送信RF信号を生成し、送受切替器4に出力する。以下の説明において、送信機2の場合を交互送信、送信機2Bの場合を連続送信と記述する。図44に示したように、連続送信の場合、PDI処理に用いられるパルス圧縮により生成された信号間のピーク距離のレンジウォーク量が、交互送信の場合に比べ、小さくなる。したがって、PDI処理に用いられるパルス圧縮により生成された信号のピーク距離が互いに近くなり、PDI処理により生成された信号の振幅の劣化が小さくなり、PDI処理により生成された信号のピーク距離の算出精度が向上する。
【0152】
PDI手段22Bには、連続してPRI毎に同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号が入力される。
PDI手段22Bは、同じ傾きのチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号に対して、式(58)に従い、PDI処理を行い、PDI処理により生成された信号RPDI(n,mτ)を出力する。
【0153】
【数43】
【0154】
相対距離・相対速度算出手段13Bは、式(59)、式(60)に従い、目標との相対距離と相対速度を算出し、位相補償手段14に出力する。ただし、n=1,2,・・・,floor(N/NPDI)NPDI、chirp(n)は送信RF信号がアップチャープ変調された信号かダウンチャープ変調された信号かを示しており、アップチャープ変調のときchirp(n)は1、ダウンチャープ変調のときchirp(n)は−1である。
【0155】
【数44】
【0156】
このように、実施の形態17に係わるレーダ装置は、実施の形態16の送信機2に代えて、キャリア信号をPRI毎にパルス変調し、連続した複数パルス毎に交互にパルス内をアップチャープ変調およびダウンチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する送信機2Bを備えたので、PDI処理に用いられるパルス圧縮により生成された信号のピーク距離が互いに近くなり、PDI処理により生成された信号の振幅の劣化が小さくなり、第2ディスクリ距離算出手段23BのPDI処理により生成された信号のピーク距離算出精度の向上が可能になる。また、実施の形態15の相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Bを備えたので、PDI処理回数と目標移動を考慮して目標との相対距離と目標との相対速度を算出することが可能になり、より低S/N環境での目標検出性能の改善と目標の相対速度計測精度の向上を図ることが可能となる。
また、実施の形態1から15の場合も、PDI手段22Bを追加し、送信機2に代えて送信機2B、測距手段12に代えてディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23B、相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Bを用いることにより、同様な効果を得ることが可能になる。
【0157】
実施の形態18.
この発明の実施の形態18に係わるレーダ装置は、実施の形態17に係わるレーダ装置と送信機2C、信号処理器6Tが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。そして、実施の形態18に係わる信号処理器6Tは、図45に示すように、実施の形態17に係わる信号処理器6Sに、相対距離・相対速度算出手段13Bの代わりに相対距離・相対速度算出手段13Cを有することが異なっており、それ以外は同様であるので、同様な部分に同じ符号を付記し説明は省略する。
【0158】
次に、実施の形態18に係わる信号処理器6Tの処理動作について図46を参照して説明する。ただし、PDI処理回数を2回としている。
送信機2Cは、キャリア信号をPRI毎にパルス変調し、パルス内をアップチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する。図46に示したように、アップチャープ変調のみのため、送信機の規模が小さくなるという利点がある。
【0159】
相対距離・相対速度算出手段13Cは、式(61)、式(62)に従い、目標との相対距離と相対速度を算出し、位相補償手段14に出力する。ただし、n=1,2,・・・,N−1である。また、実施の形態18の送信機2Cはアップチャープ変調のみを行うものとしているため、chirp(n)が1である。
【0160】
【数45】
【0161】
このように、実施の形態18に係わるレーダ装置は、実施の形態17の送信機2Bに代えて、キャリア周波数をPRI毎にパルス変調し、パルス内をアップチャープ変調することを繰り返して送信RF信号を生成し、送受切替器4に出力する送信機2Cを備えたので、送信機の規模が小さくなり、また、実施の形態17の相対距離・相対速度算出手段13Bに代えて相対距離・相対速度算出手段13Cを備えたので、同じ傾きのチャープ変調で目標移動を考慮して目標との相対距離と目標との相対速度を算出することが可能になる。 また、実施の形態18の送信機2Cはアップチャープ変調のみを行ったが、ダウンチャープ変調のみの場合も同様な効果を得ることが可能になる。
また、実施の形態1から14の場合も、送信機2に代えて送信機2C、測距手段12に代えてディスクリ距離算出手段23とピーク距離範囲算出手段24と第2ディスクリ距離算出手段23B、相対距離・相対速度算出手段13に代えて相対距離・相対速度算出手段13Cを用いることにより、同様な効果を得ることが可能になる。
【図面の簡単な説明】
【0162】
【図1】この発明の実施の形態1に係わるレーダ装置の構成図である。
【図2】実施の形態1に係わる信号処理器6の処理動作を説明するための図である。
【図3】距離シフトを利用した従来の目標との相対距離・速度算出方法を示す説明図である。
【図4】この発明の実施の形態1における距離シフトを利用し、PRI間の目標移動を考慮した目標との相対距離・速度算出方法を示す説明図である。
【図5】パルス圧縮の処理動作を示す説明図である。
【図6】この発明の実施の形態2に係わる信号処理器6Bの構成図である。
【図7】実施の形態2に係わる信号処理器6Bの処理動作を説明するための図である。
【図8】レンジ補正の処理動作を示す説明図である。
【図9】この発明の実施の形態3に係わる信号処理器6Cの構成図である。
【図10】実施の形態3に係わる信号処理器6Cの処理動作を説明するための図である。
【図11】この発明の実施の形態4に係わる信号処理器6Dの構成図である。
【図12】実施の形態4に係わる信号処理器6Dの処理動作を説明するための図である。
【図13】この発明の実施の形態5に係わる信号処理器6Eの構成図である。
【図14】実施の形態5に係わる信号処理器6Eの処理動作を説明するための図である。
【図15】この発明の実施の形態6に係わる信号処理器6Fの構成図である。
【図16】実施の形態6に係わる信号処理器6Fの処理動作を説明するための図である。
【図17】この発明の実施の形態7に係わる信号処理器6Gの構成図である。
【図18】実施の形態7に係わる信号処理器6Gの処理動作を説明するための図である。
【図19】この発明の実施の形態8に係わる信号処理器6Hの構成図である。
【図20】実施の形態8に係わる信号処理器6Hの処理動作を説明するための図である。
【図21】この発明の実施の形態9に係わる信号処理器6Jの構成図である。
【図22】実施の形態9に係わる信号処理器6Jの処理動作を説明するための図である。
【図23】この発明の実施の形態10に係わる信号処理器6Kの構成図である。
【図24】実施の形態10に係わる信号処理器6Kの処理動作を説明するための図である。
【図25】この発明の実施の形態11に係わる信号処理器6Lの構成図である。
【図26】実施の形態11に係わる信号処理器6Lの処理動作を説明するための図である。
【図27】この発明の実施の形態12に係わる信号処理器6Mの構成図である。
【図28】実施の形態12に係わる信号処理器6Mの処理動作を説明するための図である。
【図29】この発明の実施の形態13に係わる信号処理器Nの構成図である。
【図30】実施の形態13に係わる信号処理器Nの処理動作を説明するための図である。
【図31】この発明の実施の形態14に係わる信号処理器6Pの構成図である。
【図32】実施の形態14に係わる信号処理器6Pの処理動作を説明するための図である。
【図33】この発明の実施の形態15に係わる信号処理器6Qの構成図である。
【図34】実施の形態15に係わる信号処理器6Qの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【図35】PDI処理の効果を説明するために図である(PDI処理回数=2回の場合)。
【図36】サンプル点と真のピーク位置の関係を説明するための図である。
【図37】距離補正量とΔ/Σ値Dとの関係(=Δ/Σ曲線)を説明するための図である。
【図38】この発明の実施の形態16に係わるレーダ装置の構成図である。
【図39】実施の形態16に係わる信号処理器6Rの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【図40】信号のピーク距離範囲算出を説明するための図である(PDI処理回数=2回の場合)。
【図41】この発明の実施の形態17に係わるレーダ装置の構成図である。
【図42】実施の形態17に係わる信号処理器6Sの処理動作を説明するための図の一部である(PDI処理回数=2回の場合)。
【図43】実施の形態17に係わる信号処理器6Sの処理動作を説明するための図の残りの部分である。
【図44】交互送信と連続送信の処理動作を説明するための図である。
【図45】この発明の実施の形態18に係わるレーダ装置の構成図である。
【図46】実施の形態18に係わる信号処理器6Tの処理動作を説明するための図である(PDI処理回数=2回の場合)。
【符号の説明】
【0163】
1 空中線、2、2B、2C 送信機、3 チャープ信号発生器、4 送受切替器、5 受信機、6、6B、6C、6D、6E、6F、6G、6H、6J、6K、6L、6M、6N、6P、6Q、6R、6S、6T 信号処理器、7 表示器、11 パルス圧縮手段、12 測距手段、13、13B、13C 相対距離・相対速度算出手段、14、14B、14C、14D、14E、14F 位相補償手段、15 第2パルス圧縮手段、16 積分手段、17 速度算出手段、18、18B、18C レンジ補正手段、19、19B 平均相対速度算出手段、20、20B 基準相対速度・相対加速度算出手段、21 加速度補償手段、22 PDI手段、23、23B ディスクリ距離算出手段、24 ピーク距離範囲算出手段。
【特許請求の範囲】
【請求項1】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度または上記目標との相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項2】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から平均相対速度を算出する平均相対速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記平均相対速度または上記平均相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項3】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から目標との相対加速度および目標との基準相対速度を算出する基準相対速度・相対加速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対加速度および上記目標との基準相対速度、または上記目標との相対距離且つ上記目標との相対加速度および上記目標との基準相対速度を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項4】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
複数の上記時間間隔で上記レンジ補正された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項5】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から平均相対速度を算出する平均相対速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記平均相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
複数の上記時間間隔で上記レンジ補正された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項6】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から目標との相対加速度および目標との基準相対速度を算出する基準相対速度・相対加速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対加速度および上記目標との基準相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
上記目標との相対加速度を用いて上記レンジ補正された信号の加速度補償を行う加速度補償手段と、
複数の上記時間間隔で上記加速度補償された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項7】
上記目標との相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項1または4に記載のレーダ装置。
【請求項8】
上記目標との平均相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項2または5に記載のレーダ装置。
【請求項9】
上記目標との基準相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項3または6に記載のレーダ装置。
【請求項10】
上記相対距離・相対速度算出手段は、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差と時間間隔での目標移動を考慮して上記目標との相対速度または上記目標との相対距離を算出することを特徴とする請求項1乃至9のいずれか一項に記載のレーダ装置。
【請求項11】
上記測距手段に代えて、上記パルス圧縮により生成された信号から強度の大きい隣接する2信号の振幅値の差を当該2信号の和で割った値をΔ/Σ値として生成し、当該Δ/Σ値と、予め求めたΔ/Σ値と距離補正量との関係に基づいて、上記生成したΔ/Σ値に相当する距離補正量を算出し、当該距離補正量で補正した距離を算出するディスクリ距離算出手段を備えたことを特徴とする請求項1乃至10のいずれか一項に記載のレーダ装置。
【請求項12】
上記パルス圧縮手段と上記測距手段の間に、同じ傾きでチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号に対してPDI処理を行うPDI手段を備えたことを特徴とする請求項1乃至11のいずれか一項に記載のレーダ装置。
【請求項13】
PDI処理により生成された信号から得られた距離を用いて、各パルスのパルス圧縮により生成された信号のピーク距離を求める範囲を算出するピーク距離範囲算出手段を備えたことを特徴とする請求項12に記載のレーダ装置。
【請求項14】
キャリア信号が所定の時間間隔でパルス変調され、連続した複数パルス毎に交互にパルス内をアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信することを特徴とする請求項1及至13のいずれか一項に記載のレーダ装置。
【請求項15】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が連続してアップチャープ変調あるいはダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信することを特徴とする請求項1及至13のいずれか一項に記載のレーダ装置。
【請求項1】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度または上記目標との相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項2】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から平均相対速度を算出する平均相対速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記平均相対速度または上記平均相対速度および上記目標との相対距離を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項3】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から目標との相対加速度および目標との基準相対速度を算出する基準相対速度・相対加速度算出手段と、
上記受信信号の位相を補償すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対加速度および上記目標との基準相対速度、または上記目標との相対距離且つ上記目標との相対加速度および上記目標との基準相対速度を用いて位相補償量を算出し、該位相補償量を用いて上記受信信号の位相を補償し、上記位相補償された受信信号をパルス圧縮する補償手段と、
複数の上記時間間隔で上記位相補償された受信信号をパルス圧縮することにより生成された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項4】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
複数の上記時間間隔で上記レンジ補正された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項5】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から平均相対速度を算出する平均相対速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記平均相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
複数の上記時間間隔で上記レンジ補正された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項6】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が交互にアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信するレーダ装置において、
上記受信信号をパルス圧縮するパルス圧縮手段と、
上記パルス圧縮により生成された信号の強度に基づく距離を算出する測距手段と、
上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差から目標との相対速度または目標との相対距離を算出する相対距離・相対速度算出手段と、
複数の上記時間間隔で算出された上記目標との相対速度または上記目標との相対距離から目標との相対加速度および目標との基準相対速度を算出する基準相対速度・相対加速度算出手段と、
上記パルス圧縮することにより生成された信号のレンジを補正すると、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の目標までの距離が同一になるように、上記目標との相対加速度および上記目標との基準相対速度を用いてレンジ補正量を算出し、該レンジ補正量を用いて上記パルス圧縮することにより生成された信号のレンジを補正する補償手段と、
上記目標との相対加速度を用いて上記レンジ補正された信号の加速度補償を行う加速度補償手段と、
複数の上記時間間隔で上記加速度補償された信号を加算する積分手段と、
を有することを特徴とするレーダ装置。
【請求項7】
上記目標との相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項1または4に記載のレーダ装置。
【請求項8】
上記目標との平均相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項2または5に記載のレーダ装置。
【請求項9】
上記目標との基準相対速度を用いて上記積分手段の出力信号の周波数の折り返しを考慮し、目標の相対速度を算出する速度算出手段を有することを特徴とする請求項3または6に記載のレーダ装置。
【請求項10】
上記相対距離・相対速度算出手段は、上記アップチャープ変調された送信信号が送受信されて得られた受信信号および上記ダウンチャープ変調された送信信号が送受信されて得られた受信信号それぞれをパルス圧縮することにより生成された信号の強度に基づく距離の差と時間間隔での目標移動を考慮して上記目標との相対速度または上記目標との相対距離を算出することを特徴とする請求項1乃至9のいずれか一項に記載のレーダ装置。
【請求項11】
上記測距手段に代えて、上記パルス圧縮により生成された信号から強度の大きい隣接する2信号の振幅値の差を当該2信号の和で割った値をΔ/Σ値として生成し、当該Δ/Σ値と、予め求めたΔ/Σ値と距離補正量との関係に基づいて、上記生成したΔ/Σ値に相当する距離補正量を算出し、当該距離補正量で補正した距離を算出するディスクリ距離算出手段を備えたことを特徴とする請求項1乃至10のいずれか一項に記載のレーダ装置。
【請求項12】
上記パルス圧縮手段と上記測距手段の間に、同じ傾きでチャープ変調された送信信号が送受信されて得られた受信信号をパルス圧縮することにより生成された信号に対してPDI処理を行うPDI手段を備えたことを特徴とする請求項1乃至11のいずれか一項に記載のレーダ装置。
【請求項13】
PDI処理により生成された信号から得られた距離を用いて、各パルスのパルス圧縮により生成された信号のピーク距離を求める範囲を算出するピーク距離範囲算出手段を備えたことを特徴とする請求項12に記載のレーダ装置。
【請求項14】
キャリア信号が所定の時間間隔でパルス変調され、連続した複数パルス毎に交互にパルス内をアップチャープ変調とダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信することを特徴とする請求項1及至13のいずれか一項に記載のレーダ装置。
【請求項15】
キャリア信号が所定の時間間隔でパルス変調され、パルス内が連続してアップチャープ変調あるいはダウンチャープ変調されて生成された送信信号を放射し、目標で反射して戻った上記送信信号を受信信号として受信することを特徴とする請求項1及至13のいずれか一項に記載のレーダ装置。
【図1】

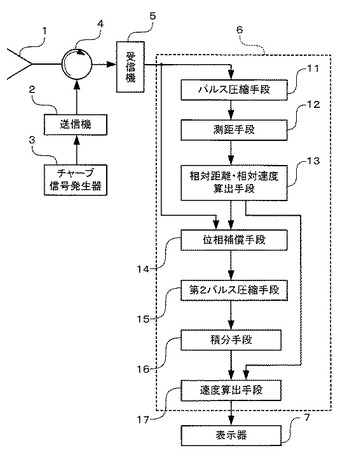
【図2】
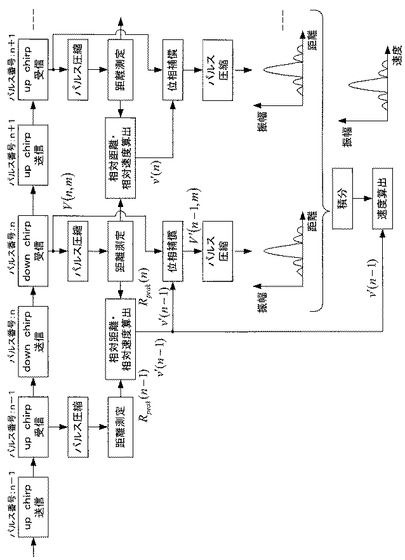
【図3】
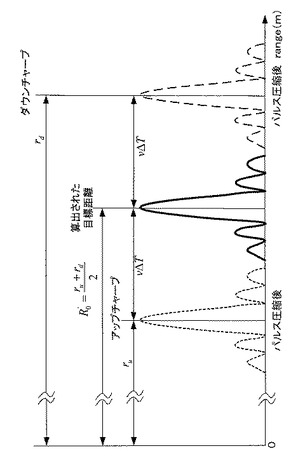
【図4】
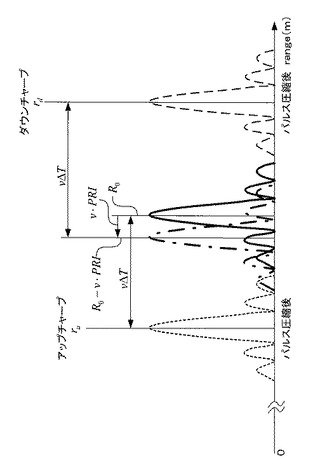
【図5】
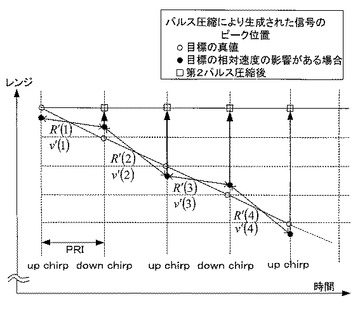
【図6】
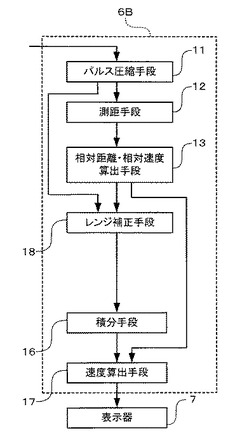
【図7】
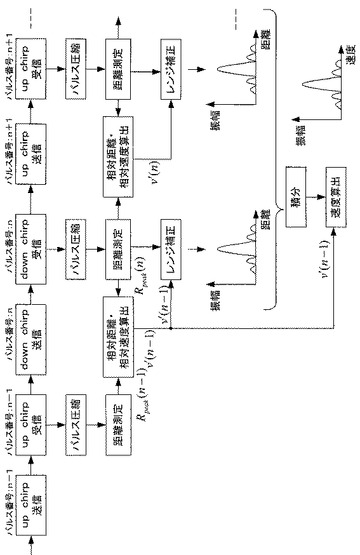
【図8】
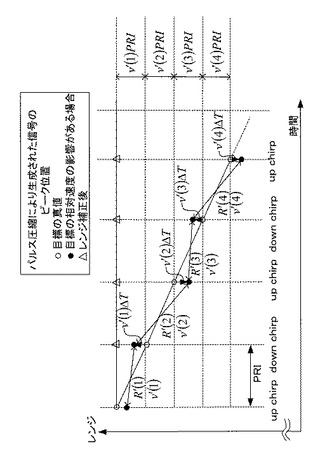
【図9】
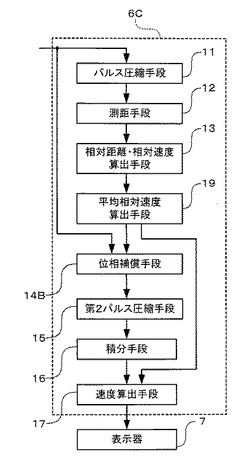
【図10】
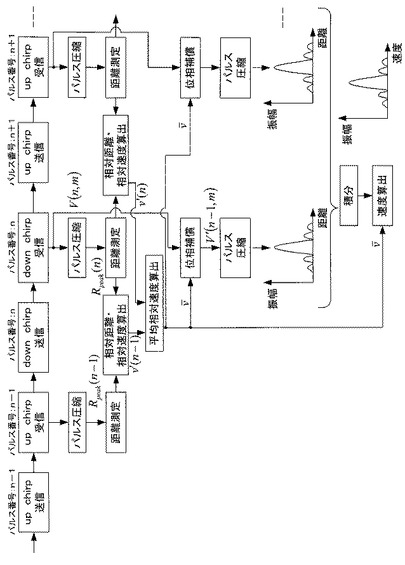
【図11】
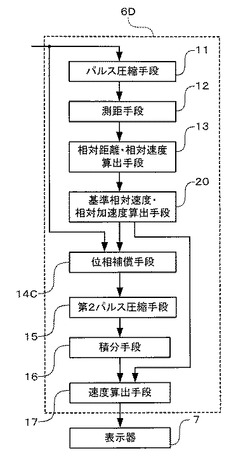
【図12】
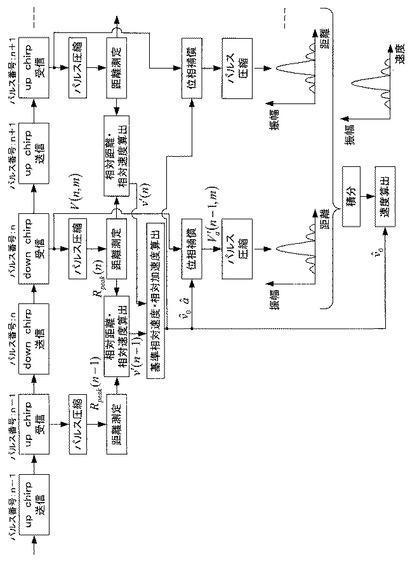
【図13】
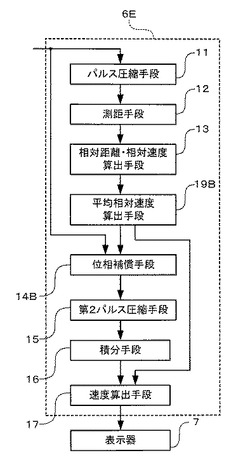
【図14】
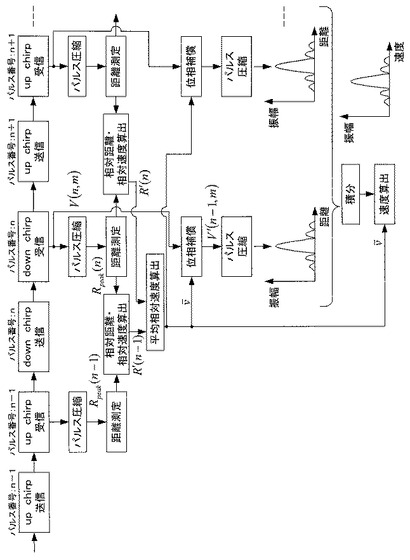
【図15】
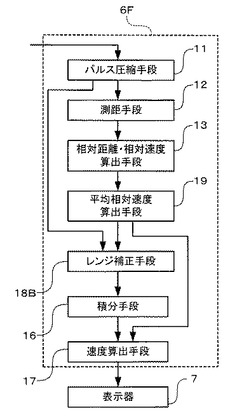
【図16】
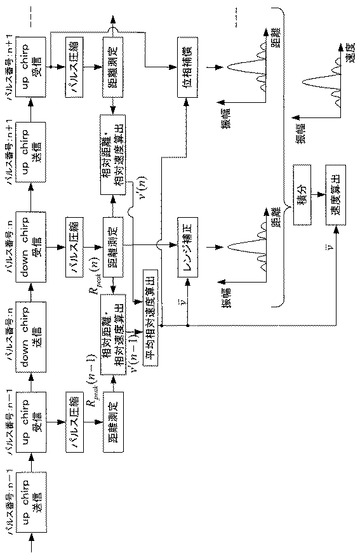
【図17】
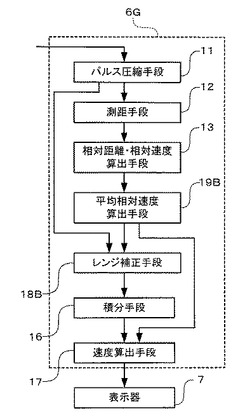
【図18】
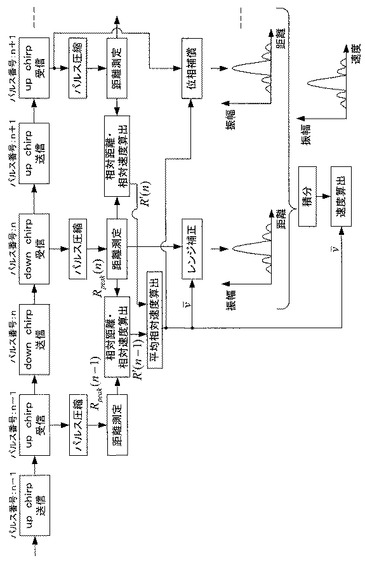
【図19】
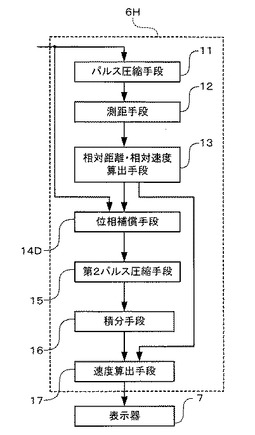
【図20】
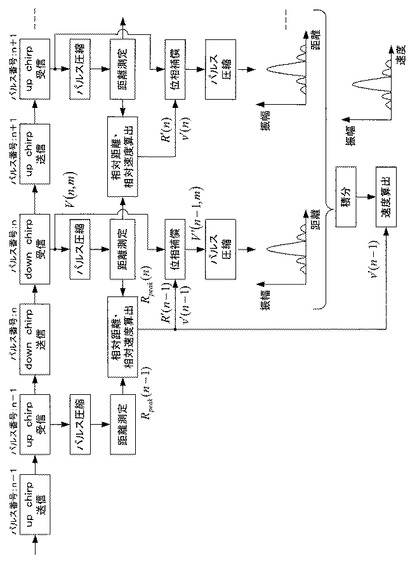
【図21】
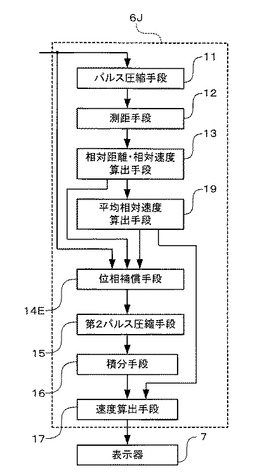
【図22】
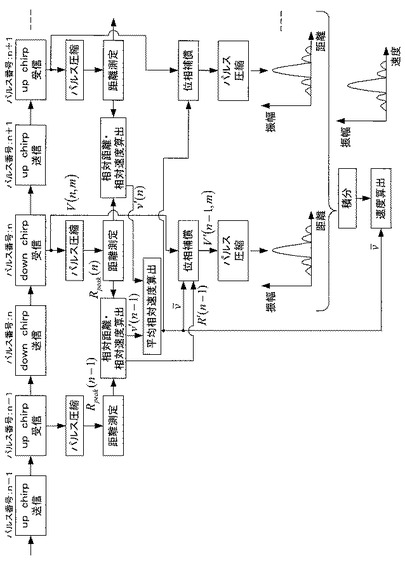
【図23】
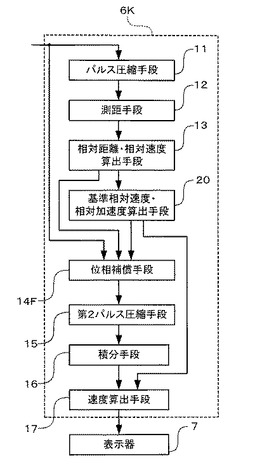
【図24】
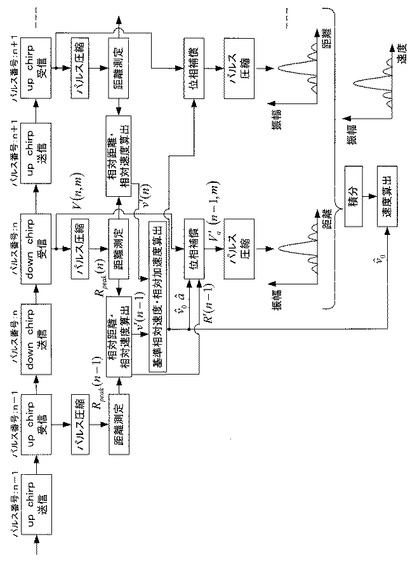
【図25】
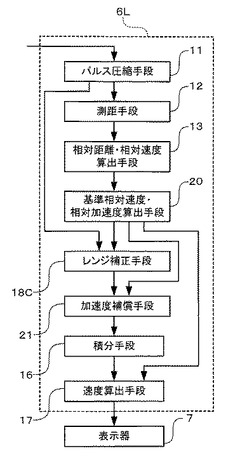
【図26】
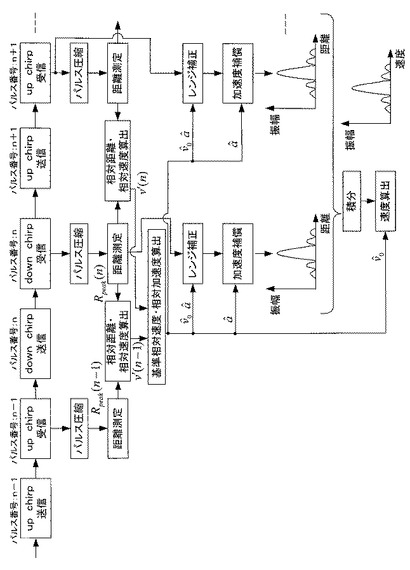
【図27】
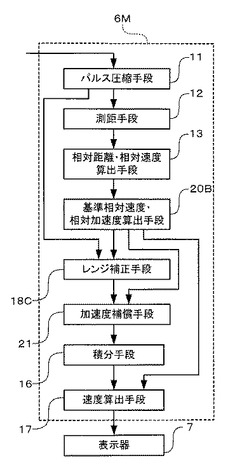
【図28】
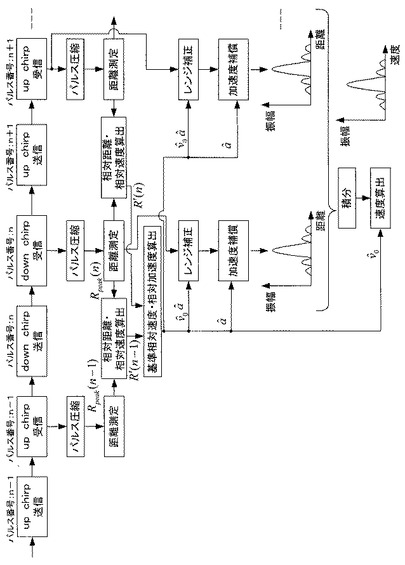
【図29】
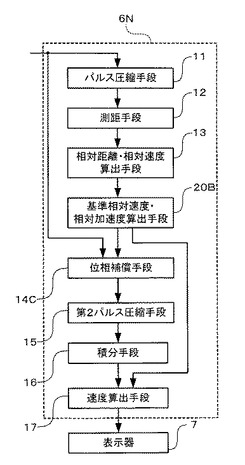
【図30】
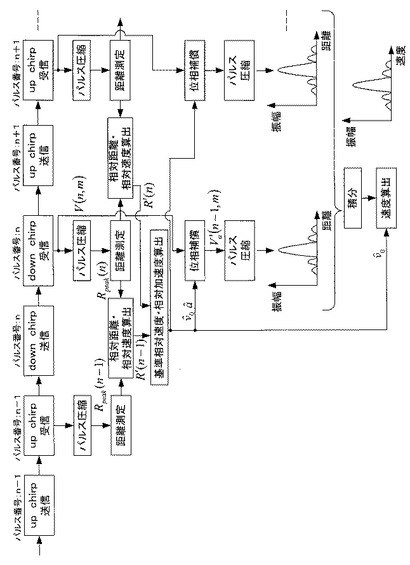
【図31】
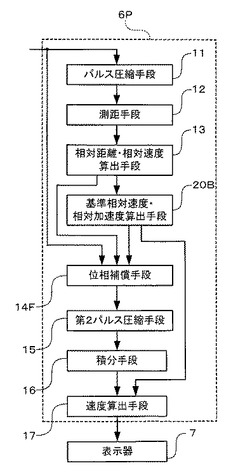
【図32】
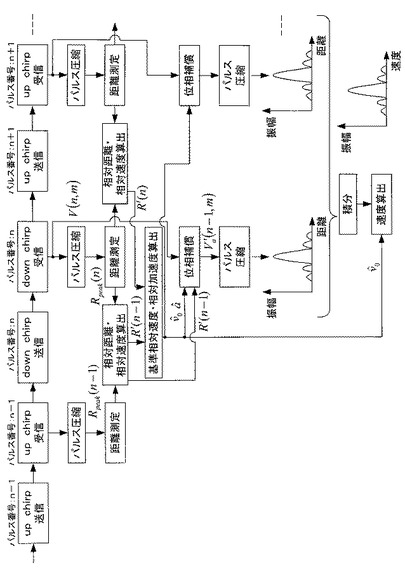
【図33】
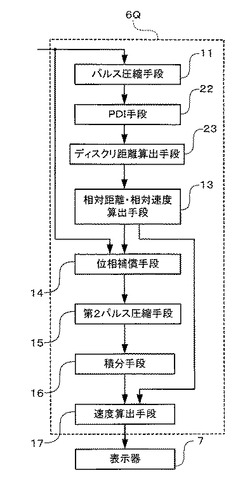
【図34】
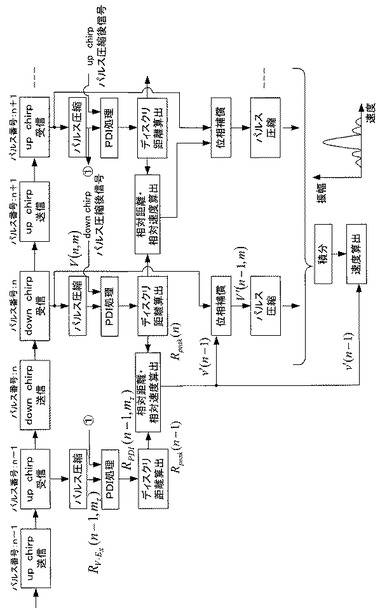
【図35】
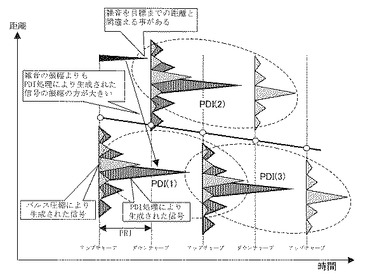
【図36】
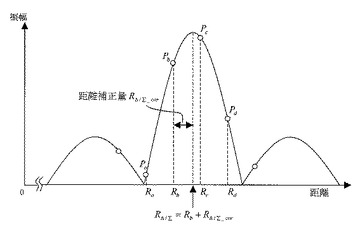
【図37】
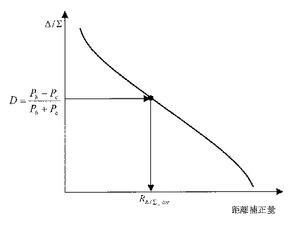
【図38】
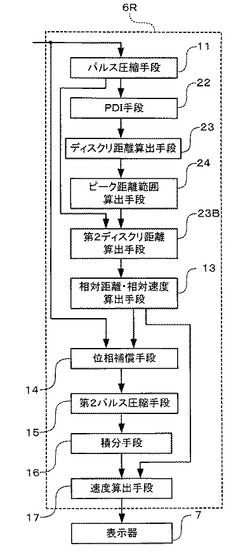
【図39】
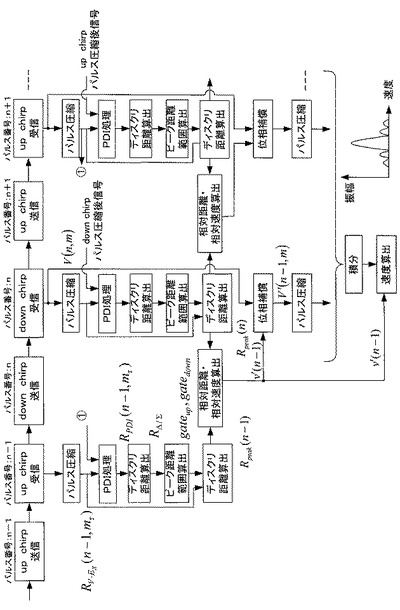
【図40】
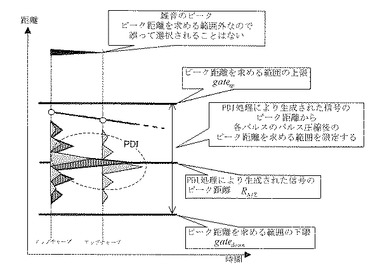
【図41】
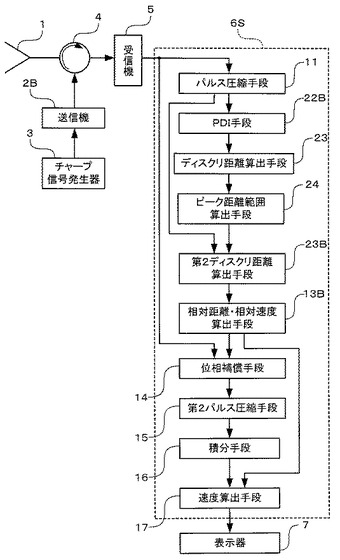
【図42】
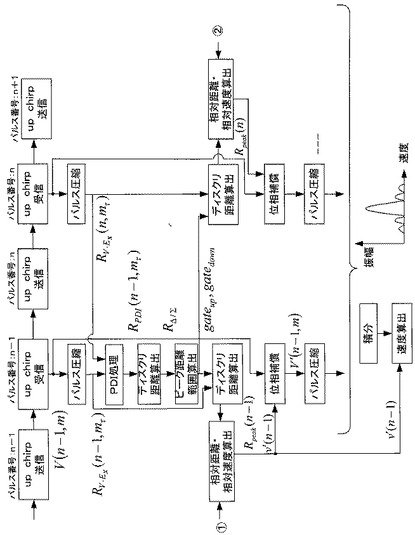
【図43】
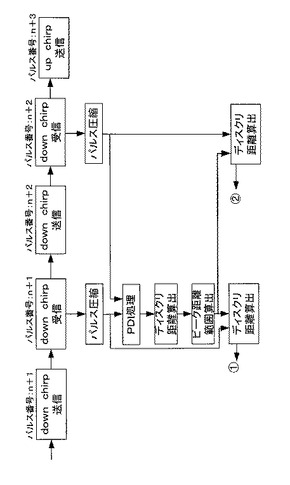
【図44】
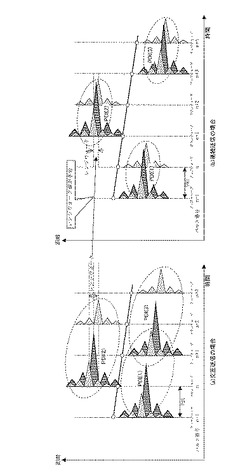
【図45】
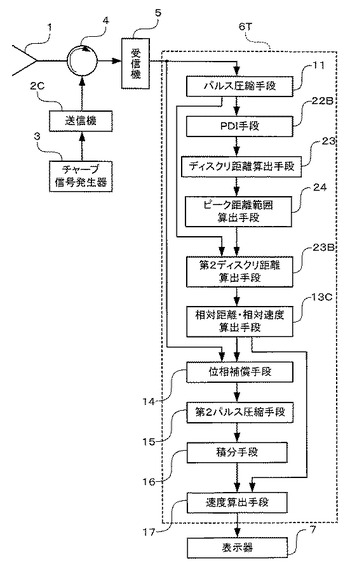
【図46】
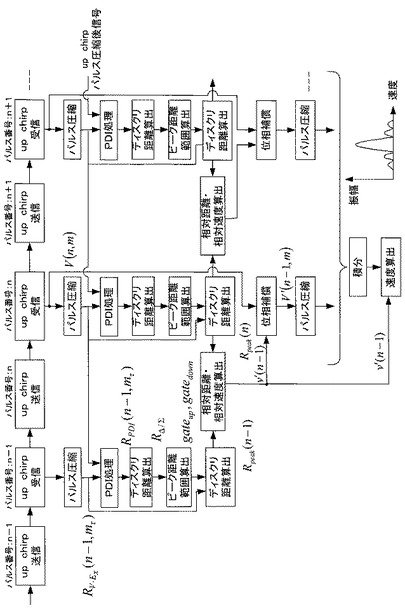
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【公開番号】特開2008−20432(P2008−20432A)
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願番号】特願2007−43663(P2007−43663)
【出願日】平成19年2月23日(2007.2.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成20年1月31日(2008.1.31)
【国際特許分類】
【出願日】平成19年2月23日(2007.2.23)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]