
レーダ装置
【課題】ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得る。
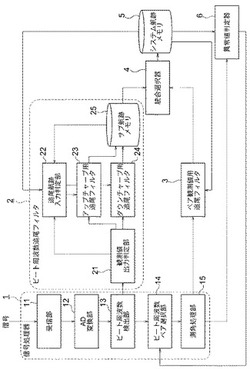
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
【解決手段】FMCW信号を受信して、受信信号と送信信号とからビート信号のピークを検出し、ビート周波数の対応付け及び測角処理を実施して目標情報を生成する信号処理器1と、ビート周波数を入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、目標の位置と速度の観測値を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3と、前記両追尾フィルタの追尾航跡同士を統合もしくは選択する統合選択器4と、システム航跡メモリ5と、異常値判定器6とを設けた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動車等の移動体の衝突防止や一定距離追従走行等に使用され、レーダ波の送受信により移動体の外部に存在する目標との相対速度や距離を検出するFMCW(Frequency Modulated Continuous Wave)レーダ装置などのレーダ装置に関するものである。
【背景技術】
【0002】
従来のレーダ装置は、図12に示すように、三角波状の変調信号により周波数変調され、周波数が一定の周期で増減を繰り返す送信信号S1を、レーダ波として送信する。次に、目標により反射されたレーダ波を受信すると共に、受信信号S2を送信信号S1とミキシングすることによりビート信号S3を発生させている。そして、このビート信号S3の周波数(ビート周波数)を、送信信号S1の周波数が増加するアップチャープ時及び周波数が減少するダウンチャープ時の各掃引区間毎に特定する。この特定されたアップチャープ時のビート周波数fu及びダウンチャープ時のビート周波数fdに基づき、次の式(91)、式(92)を用いて、目標との距離Rや相対速度Vを算出する。
【0003】
【数1】

【0004】
ここで、Bは送信信号S1の周波数変位幅、f0は送信信号S1の中心周波数、Tは1周期の変調に要する時間、Cは光速を表す。
【0005】
以上のように、従来のレーダ装置は、アップチャープ時及びダウンチャープ時のビート周波数の対応付け(以下、ペアリングと言う)により、目標の距離及び距離変化率を検出可能である。但し、アップチャープ、ダウンチャープ、それぞれで得られたビート周波数は同一目標のビート周波数だとしてもオフセットを生じている。特に、複数目標すなわち、ビート周波数が複数存在する環境においては、アップチャープ時のどのビート周波数がダウンチャープ時のビート周波数に対応するかの判定が必要となり、極めて困難である。
【0006】
この対策として、次のようなFMCWレーダ装置が提案されている(例えば、特許文献1参照)。この従来のFMCWレーダ装置は、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングにおいて、各掃引周期別に得られたビート周波数を昇順に並べ、並びが保存されるようにアップチャープ、ダウンチャープで得られたビート周波数のペアリングを実施することで複数目標環境に対応することができる。
【0007】
しかし、上記の従来技術は、いずれも外部目標の距離と速度を得るために、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングを必要とした。そのため、もし一方の周波数が得られない場合には、実際には存在するにも関わらず、周波数対を選択できないために検知することができない目標(不検知目標)や、本来存在しないはずの目標(偽目標)が発生し、計測結果の信頼性を低下させる原因となっていた。
【0008】
このような欠点を解消するために、ある目標を初めて観測した場合には、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングを行って、目標の距離、距離変化率を求めるものとし、2回目以降の観測においては、初回に求めた距離、距離変化率、及びアップチャープまたはダウンチャープのビート周波数を直接利用して、目標の距離、距離変化率を算出する方法が提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第2778864号公報
【特許文献2】特許第4186744号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、従来技術には、以下のような課題がある。特許文献2に記載された従来のレーダ装置は、ビート周波数のペアリングは必要としないものの、角度の入力は考慮されておらず、距離、距離変化率を更新することから、目標の角度が変化した場合に目標位置の追尾精度が劣化する可能性が高い。また、一般のレーダ装置に用いられているビート周波数のペアリングについて誤ったペアを除去する方法はとられていない。
【0011】
本発明は、前記のような課題を解決するためになされたものであり、ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得ることを目的とする。
【0012】
特に、これまでの従来技術では、アップチャープとダウンチャープのビート周波数を直接入力して距離、距離変化率を更新する方法を提案しているが、本発明では、目標位置を正確に推定して、誤ペアを除去する方法を提案する。
【課題を解決するための手段】
【0013】
本発明に係るレーダ装置は、周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する受信部と、前記受信信号と前記送信信号とを混合してビート信号を生成し、前記送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、前記第1のビート周波数分布の第1の周波数ピークを特定し、前記送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、前記第2のビート周波数分布の第2の周波数ピークを特定するビート周波数検出部と、前記第1のビート周波数分布の第1の周波数ピークと前記第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出するビート周波数ペア選択部と、前記ペア観測値に基づいて目標の角度を算出する測角処理部と、既存の追尾航跡を用いて、前記距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新するペア観測値用追尾フィルタと、既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタと、前記ペア観測値用追尾フィルタ及び前記ビート周波数追尾フィルタの追尾航跡を統合もしくは一方を選択してシステム航跡とする統合選択器と、前記システム航跡を記憶するシステム航跡メモリと、前記測角処理部からのペア観測値が前記システム航跡メモリに記憶されたシステム航跡と同一でない場合には、前記ペア観測値を異常値と判定して、この異常値については追尾を開始させない異常値判定器とを備えるものである。
【発明の効果】
【0014】
本発明に係るレーダ装置によれば、ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができる。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1に係るレーダ装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ装置の観測スケジュールを示す図である。
【図3】この発明の実施の形態1に係るレーダ装置のビート周波数追尾フィルタ内のアップチャープ用追尾フィルタの構成を示すブロック図である。
【図4】この発明の実施の形態1に係るレーダ装置のペア観測値用追尾フィルタの構成を示すブロック図である。
【図5】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図6】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図7】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図8】この発明の実施の形態2に係るレーダ装置の構成を示すブロック図である。
【図9】この発明の実施の形態2に係るレーダ装置の角度用追尾フィルタの構成を示すブロック図である。
【図10】この発明の実施の形態3に係るレーダ装置の構成を示すブロック図である。
【図11】この発明の実施の形態3に係るレーダ装置のアップチャープ角度用追尾フィルタの構成を示すブロック図である。
【図12】従来のレーダ装置の動作を示すタイミングチャートである。
【発明を実施するための形態】
【0016】
以下、本発明のレーダ装置の好適な実施の形態につき図面を用いて説明する。
【0017】
実施の形態1.
この発明の実施の形態1に係るレーダ装置について図1から図7までを参照しながら説明する。図1は、この発明の実施の形態1に係るレーダ装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0018】
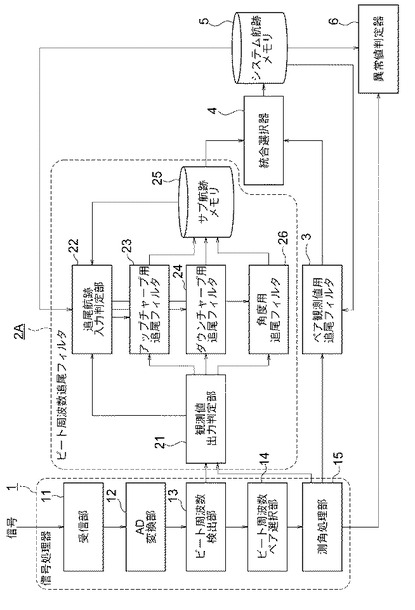
図1において、この発明の実施の形態1に係るレーダ装置は、信号処理器1と、ビート周波数追尾フィルタ2と、ペア観測値用追尾フィルタ3と、統合選択器4と、システム航跡メモリ5と、異常値判定器6とが設けられている。
【0019】
また、信号処理器1は、受信部11と、AD変換部12と、ビート周波数検出部13と、ビート周波数ペア選択部14と、測角処理部15とが設けられている。
【0020】
さらに、ビート周波数追尾フィルタ2は、観測値出力判定部21と、追尾航跡入力判定部22と、アップチャープ用追尾フィルタ23と、ダウンチャープ用追尾フィルタ24と、サブ航跡メモリ25とが設けられている。
【0021】
図3は、この発明の実施の形態1に係るレーダ装置のビート周波数追尾フィルタ内のアップチャープ用追尾フィルタの構成を示すブロック図である。
【0022】
図3において、アップチャープ用追尾フィルタ23は、予測部231と、ビート周波数変換部232と、相関部233と、平滑部234とが設けられている。なお、ダウンチャープ用追尾フィルタ24の構成及び動作は、アップチャープ用追尾フィルタ23と同様である。
【0023】
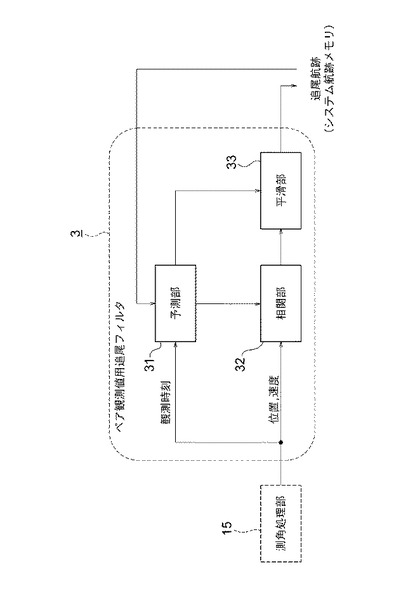
図4は、この発明の実施の形態1に係るレーダ装置のペア観測値用追尾フィルタの構成を示すブロック図である。
【0024】
図4において、ペア観測値用追尾フィルタ3は、予測部31と、相関部32と、平滑部33とが設けられている。
【0025】
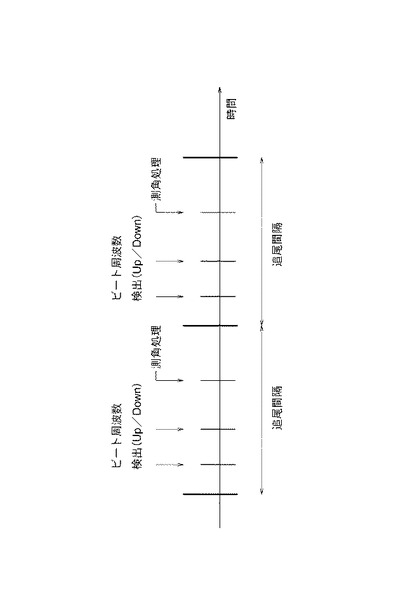
つぎに、この実施の形態1に係るレーダ装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係るレーダ装置の観測スケジュールを示す図である。
【0026】
信号処理器1内の受信部11は、周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する。AD変換部12は、受信部11から出力される中間周波のビート信号をディジタル信号に変換する。
【0027】
ビート周波数検出部13は、FFT(Fast Fourier Transform)などで周波数分析を行う。すなわち、受信信号と送信信号とを混合してビート信号を生成し、送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、第1のビート周波数分布の第1の周波数ピークを特定し、送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、第2のビート周波数分布の第2の周波数ピークを特定する。
【0028】
アップチャープにおけるビート信号の周波数U(t)iと、ダウンチャープにおけるビート信号の周波数D(t)jが抽出される。ここで、i又はjはビート周波数検出部13によって得られたピーク数を表す。また、ビート周波数にはそれらが得られた時刻(以下、ビート周波数観測時刻)が付与されていることを前提とする。さらに、図2に示すように、ビート周波数と、測角処理部15で算出される角度と、ペア観測値用追尾フィルタ3に入力される目標情報とに付与されている時刻は、異なっている。ただし、出力される順番はあらかじめ既知とする。ここでは、ペア観測値用追尾フィルタ3へペア観測値が入力される周期(システム航跡が出力される周期も同じ)を追尾周期(追尾間隔)と呼ぶ。
【0029】
ビート周波数ペア選択部14は、第1のビート周波数分布の第1の周波数ピークと第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出する。
【0030】
測角処理部15は、ビート周波数ペア選択部14からのペア観測値に基づいて目標の角度を算出する。
【0031】
ビート周波数検出部13によって得られたビート周波数は、ビート周波数追尾フィルタ2へ出力される。このビート周波数追尾フィルタ2は、既存の追尾航跡を用いて、第1のビート周波数分布の第1の周波数ピークもしくは第2のビート周波数分布の第2の周波数ピークから追尾航跡の位置及び速度を更新する。
【0032】
ビート周波数追尾フィルタ2内の観測値出力判定部21は、入力されたビート周波数がアップチャープ、ダウンチャープのいずれで得られたものであるかを判断し、アップビート周波数をアップチャープ用追尾フィルタ23に出力し、ダウンビート周波数をダウンチャープ用追尾フィルタ24に出力する。
【0033】
アップチャープ用追尾フィルタ23は、図3に示すように、アップチャープ時のビート周波数を入力し、このビート周波数に対して追尾処理を実施し、目標の位置と速度を更新する。追尾処理としては、入力されるビート周波数と位置と速度の関係式が非線形な式であるため、拡張カルマンフィルタなどを用いる。
【0034】
まず、予測部231は、システム航跡メモリ5(もしくはサブ航跡メモリ25)より出力される既存の追尾航跡(システム航跡もしくはサブ航跡)の次の式(1)に示す平滑ベクトルxk−1|k−1を用いて、次の式(2)、式(3)に示す予測ベクトルxk|k−1を計算する。平滑誤差共分散行列Pk−1|k−1と駆動雑音共分散行列Qk−1を用いて、次の式(4)に示す予測誤差共分散行列Pk|k−1を計算する。なお、計算で用いる状態推移行列Φk−1は、次の式(6)に示す、新たに観測値出力判定部21によって供給されたビート周波数に付与された時刻t(k)との差Δtk−1(=t(k)−t(k−1))を用いて、次の式(5)で計算する。
【0035】
【数2】
【0036】
ビート周波数変換部232は、次の式(7)〜式(11)に示すように、追尾航跡をビート周波数予測値fuk|k−1と予測誤差分散Puk|k−1へ変換する。
【0037】
【数3】
【0038】
相関部233は、上記のビート周波数予測値とビート周波数の相関処理を実施する。まず、観測値出力判定部21が出力した時刻tkでのアップチャープ時のビート周数の観測値fuoが次の式(12)の不等式を満足するか判定する。式(12)でduは判定閾値、Suは次の式(13)で定義する目標の残差分散である。ここで、Akは観測誤差分散である。
【0039】
【数4】
【0040】
相関部233は、式(12)を満たすビート周波数観測値が全くない場合は、平滑部234にビート周波数を出力せず、平滑部234は、次の式(14)及び式(15)で示すように、平滑値を予測値で置き換える処理(以下、メモリトラック処理と呼ぶ)を行う。
【0041】
【数5】
【0042】
一方、相関部233は、式(12)を満たす(相関あり)ビート周波数観測値がある場合は、平滑部234にビート周波数観測値を出力し、目標の平滑値を更新する。また、複数のビート周波数観測値が式(12)を満たした場合は、NN(Nearest Neighbor)などの一般的な相関アルゴリズムを用いて目標の平滑値を更新する。例えば、平滑値の更新式は、次の式(16)のようになる。ここで、ゲイン行列Kukは一般的に知られている拡張カルマンフィルタなどの理論式を用いて算出する。FlagEKFは、初期値を0として、次の式(17)に示すように、相関ありの場合のみ1を加える。
【0043】
【数6】
【0044】
そして、平滑部234は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。
【0045】
次に、追尾航跡入力判定部22は、ダウンチャープ用追尾フィルタ24へサブ航跡を出力する。ダウンチャープ用追尾フィルタ24の構成及び動作については、上述したように、アップチャープ用追尾フィルタ23と同じである。式(7)〜式(11)における状態ベクトルの上付きuをdに変更することで、ダウンチャープ用追尾フィルタ24は同様に動作する。従って、詳細な説明は省略する。
【0046】
ここで、ダウンチャープ用追尾フィルタ24は、図2のように、信号処理の時刻が異なることを想定して、通常、信号処理の時刻差Δtk(式(6))を用いて予測部241の処理を実施しているが、例えばシステム航跡の追尾周期でアップビート周波数とダウンビート周波数が同時に観測されたものとして、Δtk=0で予測部241の処理を実施したとしても問題は無い。
【0047】
ビート周波数追尾フィルタ2は、次の追尾周期までに得られるビート周波数を用いてサブ航跡を更新する。ただし、信号処理器1においてアップチャープ、ダウンチャープの順序が入れ替わっても、入力されるビート周波数の順番に応じて追尾処理をすることが可能である。ここまでがビート周波数追尾フィルタ2の処理である。
【0048】
続いて、ペア観測値用追尾フィルタ3の処理を説明する。このペア観測値用追尾フィルタ3は、図4に示すように、測角処理部15から出力される距離、速度、角度情報を持ったペア観測値を入力し、追尾処理を実施する。すなわち、既存の追尾航跡を用いて、距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新する。追尾処理としては、入力される距離、速度、角度は座標変換することで位置と速度の観測値となるため、線形カルマンフィルタなどを用いる。ここで、ペア観測値には組となったアップビート周波数とダウンビート周波数の情報も付与する。
【0049】
予測部31の動作は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。相関部32は、予測部31から出力される予測値と測角処理部15から出力されるペア観測値の相関処理を実施する。まず、時刻tkでのペア観測値zkが次の式(18)の不等式を満足するか判定する。式(18)でdLKFは判定閾値、Sは次の式(19)で定義する目標の残差共分散である。ここで、Akは観測誤差共分散である。
【0050】
【数7】
【0051】
相関部32は、相関なしとみなした場合は、平滑部33にペア観測値を出力せず、平滑部33は、式(14)及び式(15)に示す、メモリトラック処理を行う。一方、相関ありとみなした場合は、平滑部33にペア観測値を出力し、目標の平滑値を更新する。平滑式は次の式(22)のようになる。また、ゲイン行列Kkは一般的に知られているカルマンフィルタなどの理論式を用いて算出する。FlagLKFは、初期値を0として、次の式(23)に示すように、相関ありの場合のみ1を加える。
【0052】
【数8】
【0053】
ペア観測値用追尾フィルタ3は、上記の平滑ベクトル、平滑誤差共分散行列、航跡と相関したペア観測値に付与されている1組のアップビート周波数とダウンビート周波数の情報を統合選択器4へ出力する。
【0054】
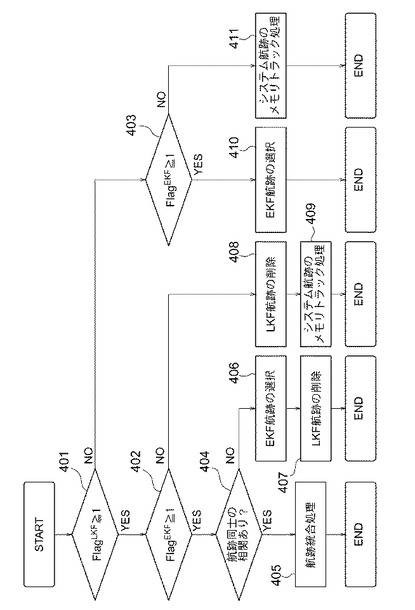
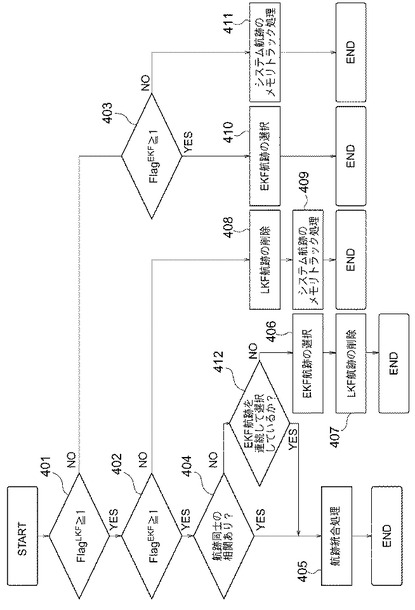
続いて、統合選択器4の動作について図5、図6及び図7を用いて説明する。図5、図6及び図7は、統合選択器の動作を示すフローチャートである。ここで、航跡を区別するため、ビート周波数追尾フィルタ2の出力航跡(以下、EKF航跡)には上付き添え字のEKF、ペア観測値用追尾フィルタ3の出力航跡(以下、LKF航跡)には上付き添え字のLKF、最終的に登録するシステム航跡には上付き添え字のSYSをつける。統合選択器4は、ペア観測値用追尾フィルタ3及びビート周波数追尾フィルタ2の追尾航跡を統合もしくは一方を選択してシステム航跡とする。システム航跡メモリ5は、このシステム航跡を記憶する。
【0055】
統合選択器4は、まず、EKF航跡とLKF航跡との照合を実施する(ステップ401〜403)。この時、両航跡ともにメモリトラックである場合は、システム航跡はメモリトラックとみなして、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ411)。
【0056】
【数9】
【0057】
LKF航跡が存在し、EKF航跡がメモリトラックである場合、LKF航跡は誤ペアの観測値で更新されたものとみなし、LKF航跡を削除する(ステップ408)。さらに、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ409)。LKF航跡がメモリトラックであり、EKF航跡が存在する場合は、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ410)。
【0058】
EKF航跡及びLKF航跡が共に存在する場合、航跡の妥当性を検定する。まず、以下の式(26)を用いて航跡同士の相関判定を実施する(ステップ404)。ここで、各々の航跡から出力されるxとPはそれぞれxk|k、Pk|kに相当する。式(26)でdTRKは判定閾値を表す。
【0059】
【数10】
【0060】
上記の相関判定で式(26)を満たさない場合は、相関なしとみなして、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ406)。そして、LKF航跡を削除する(ステップ407)。
【0061】
式(26)を満たす場合は、相関ありとみなして、航跡同士を統合する(ステップ405)。航跡を統合する方法としては、例えば、次の式(27)及び式(28)に示すように、有色性に考慮して共分散交差法を用いて統合をする。統合航跡をシステム航跡としてシステム航跡メモリ5に登録する。この時のシステム航跡の状態ベクトルxsysk|kと平滑誤差共分散行列Psysk|kは以下の式(27)及び式(28)で与えられる。ωはパラメータとする。また、ペア観測値用追尾フィルタ3の航跡と相関したペア観測値に付与されている一組のアップビート周波数とダウンビート周波数の情報もシステム航跡メモリ5に登録する。
【0062】
【数11】
【0063】
また、有色性は考慮していないが、次の式(29)及び式(30)に示すように、最小二乗統合法を使うこともある。この方法は、パラメータωを設定する必要がなくなる。
【0064】
【数12】
【0065】
演算負荷を抑えるために、次の式(31)に示すように、追尾航跡の平滑誤差共分散行列のトレースを用いて重み付け統合する方法もある(行列Aのトレースをtr(A)とする)。システム航跡の平滑誤差共分散行列は計算できないものの、逆行列を計算する必要がなくなる。
【0066】
【数13】
【0067】
さらに、演算負荷を抑えるために、次の式(32)に示すように、あらかじめ定めたパラメータa(0≦a≦1)で重み付け統合したり、次の式(33)に示すように、航跡の更新状況に応じて重み付け統合したりする方法もある。ここで、式(33)のnLKFは、LKF航跡が現在から過去Nサンプル中でメモリトラックとならずに、統合選択器4へ航跡が入力された回数を意味する。EKF航跡の場合はnEKFとする。特に、追尾フィルタとしてα−βフィルタなどの簡易的な追尾フィルタを用いる場合は、平滑誤差共分散を更新する必要がなく、有効である。
【0068】
【数14】
【0069】
統合選択器4は、図5のステップ404で航跡同士の相関がなく、EKF航跡を連続して選択している場合は、角度観測値を用いていないため追尾精度が劣化する可能性がある。そのため、図6に示すように、EKF航跡を連続して選択している回数が閾値を超えた場合は、上記の式(27)〜式(33)で示す、航跡統合方法で航跡を統合する方法(ステップ412、ステップ405)もある。
【0070】
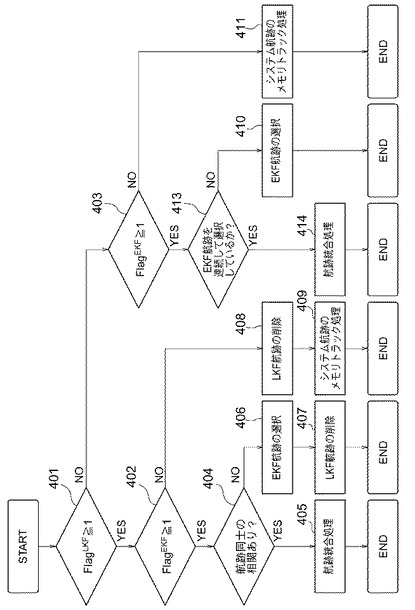
また、図5のステップ403でLKF航跡がメモリトラックであり、EKF航跡を連続して選択している場合は角度観測値を用いていないため追尾精度が劣化する可能性がある。そのため、図7のように、EKF航跡を連続して選択している回数が閾値を超えた場合は、上記の式(27)〜式(33)で示す、航跡統合方法で航跡を統合する方法(ステップ413、ステップ414)もある。さらに、図6と図7の処理は、組み合わせて用いることも可能である。以上が統合選択器4の動作説明である。
【0071】
異常値判定器6は、測角処理部15から入力されるペア観測値に対して、システム航跡メモリ5から入力されるアップビート周波数とダウンビート周波数の情報と同一でないペアを異常値とみなして、追尾を開始させない。つまり、測角処理部15からのペア観測値がシステム航跡と同一でない場合には、そのペア観測値を異常値と判定して、この異常値については追尾を開始させない。それに加えて、システム航跡に用いられたペア観測値に付与されているアップとダウンの周波数ペアを優先的にペアリングするように信号処理器1内のビート周波数ペア選択部14に出力してもよい。
【0072】
以上のように、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、アップチャープ、ダウンチャープで得たビート周波数を直接入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、アップとダウンチャープのペアより得られる目標の距離、ドップラ速度、角度を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3を併用して、追尾航跡同士を統合もしくは選択する統合選択器4と、追尾航跡と相関のあったペアに基づき誤ったペアを判定する異常値判定器6とにより、従来のFMCWレーダを用いたレーダ装置に比べて追尾精度を向上させ、誤航跡発生を抑制することができる。
【0073】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、異常値判定器6が、追尾航跡と相関のあったペアを優先的にペアリングする候補として信号処理器1へ出力することにより、誤ペアの発生を抑えることができる。
【0074】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、ビート周波数追尾フィルタ2の追尾航跡の選択が続く場合、ペア観測値用追尾フィルタ3とビート周波数追尾フィルタ2の追尾航跡同士の相関がとれなくとも、残差が小さい航跡を選択することにより、追尾精度を高めることができる。
【0075】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、ビート周波数追尾フィルタ2の追尾航跡の選択が続き、かつペア観測値用追尾フィルタ3で相関がとれる観測値が無い場合、ペア観測値用追尾フィルタ3の追尾航跡を予測した航跡とビート周波数追尾フィルタ2の追尾航跡を統合することにより、目標追尾精度を高めることができる。
【0076】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際にあらかじめ定めたパラメータで重み付け統合することにより、演算負荷を低減することができる。
【0077】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に有色性を考慮して共分散交差法を用いて重み付け統合することにより、追尾精度を確保することができる。
【0078】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に最小二乗統合法を用いて重み付け統合することにより、パラメータを設定することなく追尾精度を確保することができる。
【0079】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に各航跡の平滑誤差共分散行列のトレースを用いて重み付け統合することにより、演算負荷を低減することができる。
【0080】
さらに、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に各航跡の追尾更新回数を用いて重み付け統合することにより、演算負荷を低減することができる。
【0081】
実施の形態2.
この発明の実施の形態2に係るレーダ装置について図8及び図9を参照しながら説明する。図8は、この発明の実施の形態2に係るレーダ装置の構成を示すブロック図である。
【0082】
図8において、この発明の実施の形態2に係るレーダ装置は、ビート周波数追尾フィルタ2A内に角度用追尾フィルタ26を追加したものである。
【0083】
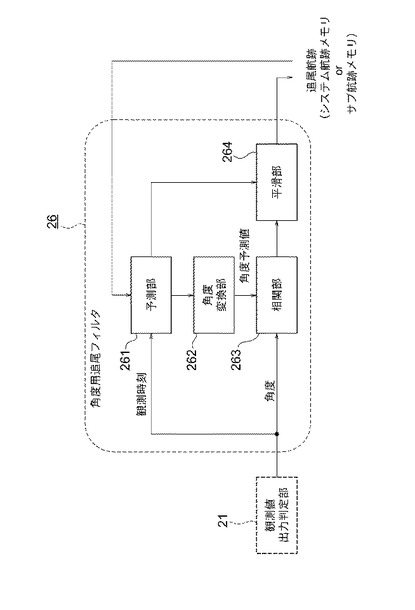
図9は、この発明の実施の形態2に係るレーダ装置の角度用追尾フィルタの構成を示すブロック図である。
【0084】
図9において、角度用追尾フィルタ26は、予測部261と、角度変換部262と、相関部263と、平滑部264とが設けられている。
【0085】
つぎに、この実施の形態2に係るレーダ装置の動作について図面を参照しながら説明する。
【0086】
この実施の形態2に係るレーダ装置は、ペア観測値の角度をビート周波数追尾フィルタ2Aへ入力して追尾処理するものである。
【0087】
角度用追尾フィルタ26は、図9に示すように、観測値出力判定部21から出力される角度を入力として追尾処理を実施する。角度用追尾フィルタ26の予測部261の動作の説明は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。
【0088】
角度変換部262は、次の式(34)〜式(36)で示すように、追尾航跡を角度予測値θk|k−1と予測誤差分散Pθk|k−1へ変換する。
【0089】
【数15】
【0090】
相関部263は、角度変換部262から出力される予測値と観測値出力判定部21から出力されるペア観測値の相関処理を実施する。まず、時刻tkでのペア観測値zkが次の式(37)の不等式を満足するか判定する。式(37)でdθは判定閾値、Sθは次の式(38)で定義する目標の残差共分散である。
【0091】
【数16】
【0092】
相関部263は、相関なしとみなした場合は、平滑部264にペア観測値を出力せず、平滑部264は、上記の式(14)及び式(15)に示す、メモリトラック処理を行う。
【0093】
一方、相関部263は、相関ありとみなした場合は、平滑部264に角度観測値を出力し、目標の平滑値を更新する。
【0094】
【数17】
【0095】
そして、平滑部264は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。その他の処理は、上記の実施の形態1と同様のため省略する。
【0096】
以上のように、実施の形態2によれば、FMCWレーダを用いたレーダ装置において、ビート周波数追尾フィルタ2Aが、アップチャープ、ダウンチャープに加えペア観測値の角度を直接入力して目標の位置と速度を更新することによって、追尾精度を向上させることができる。
【0097】
実施の形態3.
この発明の実施の形態3に係るレーダ装置について図10及び図11を参照しながら説明する。図10は、この発明の実施の形態3に係るレーダ装置の構成を示すブロック図である。
【0098】
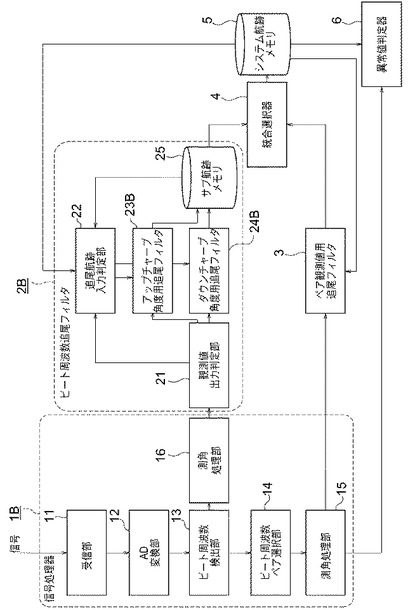
図10において、この発明の実施の形態3に係るレーダ装置は、信号処理器1B内に測角処理部15と同じ測角処理部16を追加するとともに、ビート周波数追尾フィルタ2B内に、アップチャープ用追尾フィルタ23とダウンチャープ用追尾フィルタ24の代わりに、アップチャープ角度用追尾フィルタ23Bとダウンチャープ角度用追尾フィルタ24Bを追加したものである。
【0099】
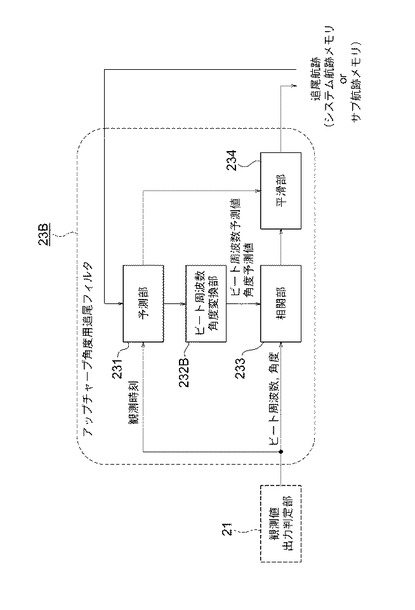
図11は、この発明の実施の形態3に係るレーダ装置のアップチャープ角度用追尾フィルタの構成を示すブロック図である。
【0100】
図11において、アップチャープ角度用追尾フィルタ23Bは、予測部231と、ビート周波数角度変換部232Bと、相関部233と、平滑部234とが設けられている。
【0101】
つぎに、この実施の形態3に係るレーダ装置の動作について図面を参照しながら説明する。
【0102】
この実施の形態3に係るレーダ装置は、ビート周波数毎に測角処理をして角度が得られる場合、この角度をビート周波数追尾フィルタ2Bへ入力して追尾処理するものである。
【0103】
アップチャープ角度用追尾フィルタ23Bは、図11に示すように、観測値出力判定部21から出力されるアップチャープのビート周波数とそれに付与される角度を入力として追尾処理を実施する。図11のアップチャープ角度用追尾フィルタ23Bの予測部231の動作は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。
【0104】
ビート周波数角度変換部232Bでは、追尾航跡からビート周波数予測値fuk|k−1とその予測誤差分散Puk|k−1、角度予測値θk|k−1とその予測誤差分散Pθk|k−1を算出する。算出式については、省略する。
【0105】
相関部233は、ビート周波数角度変換部232Bから出力される予測値とビート周波数、角度観測値の相関処理を実施する。まず、時刻tkでのビート周波数観測値fuoと角度観測値θoが次の式(41)の不等式を満足するか判定する。式(41)でdは判定閾値、Suは上記の式(13)、Sθは上記の式(38)で定義する残差共分散である。
【0106】
【数18】
【0107】
相関部233は、相関なしとみなした場合は、平滑部234にビート周波数、角度観測値を出力せず、平滑部234は、上記の式(14)及び式(15)で示す、メモリトラック処理を行う。
【0108】
一方、相関部233は、相関ありとみなした場合は、平滑部234にビート周波数、角度観測値を出力し、目標の平滑値を更新する。
【0109】
【数19】
【0110】
次に、平滑部234は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。その他の処理は、上記の実施の形態1と同様のため省略する。
【0111】
以上のように、実施の形態3によれば、FMCWレーダを用いたレーダ装置において、ビート周波数追尾フィルタ2Bが、アップチャープ、ダウンチャープに加え、それに付与される角度を直接入力して目標の位置と速度を更新することによって、追尾精度を向上させることができる。
【符号の説明】
【0112】
1、1B 信号処理器、2、2A、2B ビート周波数追尾フィルタ、3 ペア観測値用追尾フィルタ、4 統合選択器、5 システム航跡メモリ、6 異常値判定器、11 受信部、12 AD変換部、13 ビート周波数検出部、14 ビート周波数ペア選択部、15 測角処理部、16 測角処理部、21 観測値出力判定部、22 追尾航跡入力判定部、23 アップチャープ用追尾フィルタ、23B アップチャープ角度用追尾フィルタ、24 ダウンチャープ用追尾フィルタ、24B ダウンチャープ角度用追尾フィルタ、25 サブ航跡メモリ、26 角度用追尾フィルタ、31 予測部、32 相関部、33 平滑部、231 予測部、232 ビート周波数変換部、232B ビート周波数角度変換部、233 相関部、234 平滑部、261 予測部、262 角度変換部、263 相関部、264 平滑部。
【技術分野】
【0001】
この発明は、自動車等の移動体の衝突防止や一定距離追従走行等に使用され、レーダ波の送受信により移動体の外部に存在する目標との相対速度や距離を検出するFMCW(Frequency Modulated Continuous Wave)レーダ装置などのレーダ装置に関するものである。
【背景技術】
【0002】
従来のレーダ装置は、図12に示すように、三角波状の変調信号により周波数変調され、周波数が一定の周期で増減を繰り返す送信信号S1を、レーダ波として送信する。次に、目標により反射されたレーダ波を受信すると共に、受信信号S2を送信信号S1とミキシングすることによりビート信号S3を発生させている。そして、このビート信号S3の周波数(ビート周波数)を、送信信号S1の周波数が増加するアップチャープ時及び周波数が減少するダウンチャープ時の各掃引区間毎に特定する。この特定されたアップチャープ時のビート周波数fu及びダウンチャープ時のビート周波数fdに基づき、次の式(91)、式(92)を用いて、目標との距離Rや相対速度Vを算出する。
【0003】
【数1】
【0004】
ここで、Bは送信信号S1の周波数変位幅、f0は送信信号S1の中心周波数、Tは1周期の変調に要する時間、Cは光速を表す。
【0005】
以上のように、従来のレーダ装置は、アップチャープ時及びダウンチャープ時のビート周波数の対応付け(以下、ペアリングと言う)により、目標の距離及び距離変化率を検出可能である。但し、アップチャープ、ダウンチャープ、それぞれで得られたビート周波数は同一目標のビート周波数だとしてもオフセットを生じている。特に、複数目標すなわち、ビート周波数が複数存在する環境においては、アップチャープ時のどのビート周波数がダウンチャープ時のビート周波数に対応するかの判定が必要となり、極めて困難である。
【0006】
この対策として、次のようなFMCWレーダ装置が提案されている(例えば、特許文献1参照)。この従来のFMCWレーダ装置は、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングにおいて、各掃引周期別に得られたビート周波数を昇順に並べ、並びが保存されるようにアップチャープ、ダウンチャープで得られたビート周波数のペアリングを実施することで複数目標環境に対応することができる。
【0007】
しかし、上記の従来技術は、いずれも外部目標の距離と速度を得るために、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングを必要とした。そのため、もし一方の周波数が得られない場合には、実際には存在するにも関わらず、周波数対を選択できないために検知することができない目標(不検知目標)や、本来存在しないはずの目標(偽目標)が発生し、計測結果の信頼性を低下させる原因となっていた。
【0008】
このような欠点を解消するために、ある目標を初めて観測した場合には、アップチャープ時及びダウンチャープ時に得られたビート周波数のペアリングを行って、目標の距離、距離変化率を求めるものとし、2回目以降の観測においては、初回に求めた距離、距離変化率、及びアップチャープまたはダウンチャープのビート周波数を直接利用して、目標の距離、距離変化率を算出する方法が提案されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第2778864号公報
【特許文献2】特許第4186744号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、従来技術には、以下のような課題がある。特許文献2に記載された従来のレーダ装置は、ビート周波数のペアリングは必要としないものの、角度の入力は考慮されておらず、距離、距離変化率を更新することから、目標の角度が変化した場合に目標位置の追尾精度が劣化する可能性が高い。また、一般のレーダ装置に用いられているビート周波数のペアリングについて誤ったペアを除去する方法はとられていない。
【0011】
本発明は、前記のような課題を解決するためになされたものであり、ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができるレーダ装置を得ることを目的とする。
【0012】
特に、これまでの従来技術では、アップチャープとダウンチャープのビート周波数を直接入力して距離、距離変化率を更新する方法を提案しているが、本発明では、目標位置を正確に推定して、誤ペアを除去する方法を提案する。
【課題を解決するための手段】
【0013】
本発明に係るレーダ装置は、周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する受信部と、前記受信信号と前記送信信号とを混合してビート信号を生成し、前記送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、前記第1のビート周波数分布の第1の周波数ピークを特定し、前記送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、前記第2のビート周波数分布の第2の周波数ピークを特定するビート周波数検出部と、前記第1のビート周波数分布の第1の周波数ピークと前記第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出するビート周波数ペア選択部と、前記ペア観測値に基づいて目標の角度を算出する測角処理部と、既存の追尾航跡を用いて、前記距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新するペア観測値用追尾フィルタと、既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタと、前記ペア観測値用追尾フィルタ及び前記ビート周波数追尾フィルタの追尾航跡を統合もしくは一方を選択してシステム航跡とする統合選択器と、前記システム航跡を記憶するシステム航跡メモリと、前記測角処理部からのペア観測値が前記システム航跡メモリに記憶されたシステム航跡と同一でない場合には、前記ペア観測値を異常値と判定して、この異常値については追尾を開始させない異常値判定器とを備えるものである。
【発明の効果】
【0014】
本発明に係るレーダ装置によれば、ビート周波数を入力する追尾フィルタと、ペアリング後の観測値を入力とする追尾フィルタを併用して用いることで、アップチャープとダウンチャープ時のビート周波数のピーク数が異なる場合においても目標の追尾精度を向上することができ、誤ペアを除去することができる。
【図面の簡単な説明】
【0015】
【図1】この発明の実施の形態1に係るレーダ装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係るレーダ装置の観測スケジュールを示す図である。
【図3】この発明の実施の形態1に係るレーダ装置のビート周波数追尾フィルタ内のアップチャープ用追尾フィルタの構成を示すブロック図である。
【図4】この発明の実施の形態1に係るレーダ装置のペア観測値用追尾フィルタの構成を示すブロック図である。
【図5】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図6】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図7】この発明の実施の形態1に係るレーダ装置の統合選択器の動作を示すフローチャートである。
【図8】この発明の実施の形態2に係るレーダ装置の構成を示すブロック図である。
【図9】この発明の実施の形態2に係るレーダ装置の角度用追尾フィルタの構成を示すブロック図である。
【図10】この発明の実施の形態3に係るレーダ装置の構成を示すブロック図である。
【図11】この発明の実施の形態3に係るレーダ装置のアップチャープ角度用追尾フィルタの構成を示すブロック図である。
【図12】従来のレーダ装置の動作を示すタイミングチャートである。
【発明を実施するための形態】
【0016】
以下、本発明のレーダ装置の好適な実施の形態につき図面を用いて説明する。
【0017】
実施の形態1.
この発明の実施の形態1に係るレーダ装置について図1から図7までを参照しながら説明する。図1は、この発明の実施の形態1に係るレーダ装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0018】
図1において、この発明の実施の形態1に係るレーダ装置は、信号処理器1と、ビート周波数追尾フィルタ2と、ペア観測値用追尾フィルタ3と、統合選択器4と、システム航跡メモリ5と、異常値判定器6とが設けられている。
【0019】
また、信号処理器1は、受信部11と、AD変換部12と、ビート周波数検出部13と、ビート周波数ペア選択部14と、測角処理部15とが設けられている。
【0020】
さらに、ビート周波数追尾フィルタ2は、観測値出力判定部21と、追尾航跡入力判定部22と、アップチャープ用追尾フィルタ23と、ダウンチャープ用追尾フィルタ24と、サブ航跡メモリ25とが設けられている。
【0021】
図3は、この発明の実施の形態1に係るレーダ装置のビート周波数追尾フィルタ内のアップチャープ用追尾フィルタの構成を示すブロック図である。
【0022】
図3において、アップチャープ用追尾フィルタ23は、予測部231と、ビート周波数変換部232と、相関部233と、平滑部234とが設けられている。なお、ダウンチャープ用追尾フィルタ24の構成及び動作は、アップチャープ用追尾フィルタ23と同様である。
【0023】
図4は、この発明の実施の形態1に係るレーダ装置のペア観測値用追尾フィルタの構成を示すブロック図である。
【0024】
図4において、ペア観測値用追尾フィルタ3は、予測部31と、相関部32と、平滑部33とが設けられている。
【0025】
つぎに、この実施の形態1に係るレーダ装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係るレーダ装置の観測スケジュールを示す図である。
【0026】
信号処理器1内の受信部11は、周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する。AD変換部12は、受信部11から出力される中間周波のビート信号をディジタル信号に変換する。
【0027】
ビート周波数検出部13は、FFT(Fast Fourier Transform)などで周波数分析を行う。すなわち、受信信号と送信信号とを混合してビート信号を生成し、送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、第1のビート周波数分布の第1の周波数ピークを特定し、送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、第2のビート周波数分布の第2の周波数ピークを特定する。
【0028】
アップチャープにおけるビート信号の周波数U(t)iと、ダウンチャープにおけるビート信号の周波数D(t)jが抽出される。ここで、i又はjはビート周波数検出部13によって得られたピーク数を表す。また、ビート周波数にはそれらが得られた時刻(以下、ビート周波数観測時刻)が付与されていることを前提とする。さらに、図2に示すように、ビート周波数と、測角処理部15で算出される角度と、ペア観測値用追尾フィルタ3に入力される目標情報とに付与されている時刻は、異なっている。ただし、出力される順番はあらかじめ既知とする。ここでは、ペア観測値用追尾フィルタ3へペア観測値が入力される周期(システム航跡が出力される周期も同じ)を追尾周期(追尾間隔)と呼ぶ。
【0029】
ビート周波数ペア選択部14は、第1のビート周波数分布の第1の周波数ピークと第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出する。
【0030】
測角処理部15は、ビート周波数ペア選択部14からのペア観測値に基づいて目標の角度を算出する。
【0031】
ビート周波数検出部13によって得られたビート周波数は、ビート周波数追尾フィルタ2へ出力される。このビート周波数追尾フィルタ2は、既存の追尾航跡を用いて、第1のビート周波数分布の第1の周波数ピークもしくは第2のビート周波数分布の第2の周波数ピークから追尾航跡の位置及び速度を更新する。
【0032】
ビート周波数追尾フィルタ2内の観測値出力判定部21は、入力されたビート周波数がアップチャープ、ダウンチャープのいずれで得られたものであるかを判断し、アップビート周波数をアップチャープ用追尾フィルタ23に出力し、ダウンビート周波数をダウンチャープ用追尾フィルタ24に出力する。
【0033】
アップチャープ用追尾フィルタ23は、図3に示すように、アップチャープ時のビート周波数を入力し、このビート周波数に対して追尾処理を実施し、目標の位置と速度を更新する。追尾処理としては、入力されるビート周波数と位置と速度の関係式が非線形な式であるため、拡張カルマンフィルタなどを用いる。
【0034】
まず、予測部231は、システム航跡メモリ5(もしくはサブ航跡メモリ25)より出力される既存の追尾航跡(システム航跡もしくはサブ航跡)の次の式(1)に示す平滑ベクトルxk−1|k−1を用いて、次の式(2)、式(3)に示す予測ベクトルxk|k−1を計算する。平滑誤差共分散行列Pk−1|k−1と駆動雑音共分散行列Qk−1を用いて、次の式(4)に示す予測誤差共分散行列Pk|k−1を計算する。なお、計算で用いる状態推移行列Φk−1は、次の式(6)に示す、新たに観測値出力判定部21によって供給されたビート周波数に付与された時刻t(k)との差Δtk−1(=t(k)−t(k−1))を用いて、次の式(5)で計算する。
【0035】
【数2】
【0036】
ビート周波数変換部232は、次の式(7)〜式(11)に示すように、追尾航跡をビート周波数予測値fuk|k−1と予測誤差分散Puk|k−1へ変換する。
【0037】
【数3】
【0038】
相関部233は、上記のビート周波数予測値とビート周波数の相関処理を実施する。まず、観測値出力判定部21が出力した時刻tkでのアップチャープ時のビート周数の観測値fuoが次の式(12)の不等式を満足するか判定する。式(12)でduは判定閾値、Suは次の式(13)で定義する目標の残差分散である。ここで、Akは観測誤差分散である。
【0039】
【数4】
【0040】
相関部233は、式(12)を満たすビート周波数観測値が全くない場合は、平滑部234にビート周波数を出力せず、平滑部234は、次の式(14)及び式(15)で示すように、平滑値を予測値で置き換える処理(以下、メモリトラック処理と呼ぶ)を行う。
【0041】
【数5】
【0042】
一方、相関部233は、式(12)を満たす(相関あり)ビート周波数観測値がある場合は、平滑部234にビート周波数観測値を出力し、目標の平滑値を更新する。また、複数のビート周波数観測値が式(12)を満たした場合は、NN(Nearest Neighbor)などの一般的な相関アルゴリズムを用いて目標の平滑値を更新する。例えば、平滑値の更新式は、次の式(16)のようになる。ここで、ゲイン行列Kukは一般的に知られている拡張カルマンフィルタなどの理論式を用いて算出する。FlagEKFは、初期値を0として、次の式(17)に示すように、相関ありの場合のみ1を加える。
【0043】
【数6】
【0044】
そして、平滑部234は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。
【0045】
次に、追尾航跡入力判定部22は、ダウンチャープ用追尾フィルタ24へサブ航跡を出力する。ダウンチャープ用追尾フィルタ24の構成及び動作については、上述したように、アップチャープ用追尾フィルタ23と同じである。式(7)〜式(11)における状態ベクトルの上付きuをdに変更することで、ダウンチャープ用追尾フィルタ24は同様に動作する。従って、詳細な説明は省略する。
【0046】
ここで、ダウンチャープ用追尾フィルタ24は、図2のように、信号処理の時刻が異なることを想定して、通常、信号処理の時刻差Δtk(式(6))を用いて予測部241の処理を実施しているが、例えばシステム航跡の追尾周期でアップビート周波数とダウンビート周波数が同時に観測されたものとして、Δtk=0で予測部241の処理を実施したとしても問題は無い。
【0047】
ビート周波数追尾フィルタ2は、次の追尾周期までに得られるビート周波数を用いてサブ航跡を更新する。ただし、信号処理器1においてアップチャープ、ダウンチャープの順序が入れ替わっても、入力されるビート周波数の順番に応じて追尾処理をすることが可能である。ここまでがビート周波数追尾フィルタ2の処理である。
【0048】
続いて、ペア観測値用追尾フィルタ3の処理を説明する。このペア観測値用追尾フィルタ3は、図4に示すように、測角処理部15から出力される距離、速度、角度情報を持ったペア観測値を入力し、追尾処理を実施する。すなわち、既存の追尾航跡を用いて、距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新する。追尾処理としては、入力される距離、速度、角度は座標変換することで位置と速度の観測値となるため、線形カルマンフィルタなどを用いる。ここで、ペア観測値には組となったアップビート周波数とダウンビート周波数の情報も付与する。
【0049】
予測部31の動作は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。相関部32は、予測部31から出力される予測値と測角処理部15から出力されるペア観測値の相関処理を実施する。まず、時刻tkでのペア観測値zkが次の式(18)の不等式を満足するか判定する。式(18)でdLKFは判定閾値、Sは次の式(19)で定義する目標の残差共分散である。ここで、Akは観測誤差共分散である。
【0050】
【数7】
【0051】
相関部32は、相関なしとみなした場合は、平滑部33にペア観測値を出力せず、平滑部33は、式(14)及び式(15)に示す、メモリトラック処理を行う。一方、相関ありとみなした場合は、平滑部33にペア観測値を出力し、目標の平滑値を更新する。平滑式は次の式(22)のようになる。また、ゲイン行列Kkは一般的に知られているカルマンフィルタなどの理論式を用いて算出する。FlagLKFは、初期値を0として、次の式(23)に示すように、相関ありの場合のみ1を加える。
【0052】
【数8】
【0053】
ペア観測値用追尾フィルタ3は、上記の平滑ベクトル、平滑誤差共分散行列、航跡と相関したペア観測値に付与されている1組のアップビート周波数とダウンビート周波数の情報を統合選択器4へ出力する。
【0054】
続いて、統合選択器4の動作について図5、図6及び図7を用いて説明する。図5、図6及び図7は、統合選択器の動作を示すフローチャートである。ここで、航跡を区別するため、ビート周波数追尾フィルタ2の出力航跡(以下、EKF航跡)には上付き添え字のEKF、ペア観測値用追尾フィルタ3の出力航跡(以下、LKF航跡)には上付き添え字のLKF、最終的に登録するシステム航跡には上付き添え字のSYSをつける。統合選択器4は、ペア観測値用追尾フィルタ3及びビート周波数追尾フィルタ2の追尾航跡を統合もしくは一方を選択してシステム航跡とする。システム航跡メモリ5は、このシステム航跡を記憶する。
【0055】
統合選択器4は、まず、EKF航跡とLKF航跡との照合を実施する(ステップ401〜403)。この時、両航跡ともにメモリトラックである場合は、システム航跡はメモリトラックとみなして、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ411)。
【0056】
【数9】
【0057】
LKF航跡が存在し、EKF航跡がメモリトラックである場合、LKF航跡は誤ペアの観測値で更新されたものとみなし、LKF航跡を削除する(ステップ408)。さらに、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ409)。LKF航跡がメモリトラックであり、EKF航跡が存在する場合は、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ410)。
【0058】
EKF航跡及びLKF航跡が共に存在する場合、航跡の妥当性を検定する。まず、以下の式(26)を用いて航跡同士の相関判定を実施する(ステップ404)。ここで、各々の航跡から出力されるxとPはそれぞれxk|k、Pk|kに相当する。式(26)でdTRKは判定閾値を表す。
【0059】
【数10】
【0060】
上記の相関判定で式(26)を満たさない場合は、相関なしとみなして、EKF航跡をシステム航跡としてシステム航跡メモリ5に登録する(ステップ406)。そして、LKF航跡を削除する(ステップ407)。
【0061】
式(26)を満たす場合は、相関ありとみなして、航跡同士を統合する(ステップ405)。航跡を統合する方法としては、例えば、次の式(27)及び式(28)に示すように、有色性に考慮して共分散交差法を用いて統合をする。統合航跡をシステム航跡としてシステム航跡メモリ5に登録する。この時のシステム航跡の状態ベクトルxsysk|kと平滑誤差共分散行列Psysk|kは以下の式(27)及び式(28)で与えられる。ωはパラメータとする。また、ペア観測値用追尾フィルタ3の航跡と相関したペア観測値に付与されている一組のアップビート周波数とダウンビート周波数の情報もシステム航跡メモリ5に登録する。
【0062】
【数11】
【0063】
また、有色性は考慮していないが、次の式(29)及び式(30)に示すように、最小二乗統合法を使うこともある。この方法は、パラメータωを設定する必要がなくなる。
【0064】
【数12】
【0065】
演算負荷を抑えるために、次の式(31)に示すように、追尾航跡の平滑誤差共分散行列のトレースを用いて重み付け統合する方法もある(行列Aのトレースをtr(A)とする)。システム航跡の平滑誤差共分散行列は計算できないものの、逆行列を計算する必要がなくなる。
【0066】
【数13】
【0067】
さらに、演算負荷を抑えるために、次の式(32)に示すように、あらかじめ定めたパラメータa(0≦a≦1)で重み付け統合したり、次の式(33)に示すように、航跡の更新状況に応じて重み付け統合したりする方法もある。ここで、式(33)のnLKFは、LKF航跡が現在から過去Nサンプル中でメモリトラックとならずに、統合選択器4へ航跡が入力された回数を意味する。EKF航跡の場合はnEKFとする。特に、追尾フィルタとしてα−βフィルタなどの簡易的な追尾フィルタを用いる場合は、平滑誤差共分散を更新する必要がなく、有効である。
【0068】
【数14】
【0069】
統合選択器4は、図5のステップ404で航跡同士の相関がなく、EKF航跡を連続して選択している場合は、角度観測値を用いていないため追尾精度が劣化する可能性がある。そのため、図6に示すように、EKF航跡を連続して選択している回数が閾値を超えた場合は、上記の式(27)〜式(33)で示す、航跡統合方法で航跡を統合する方法(ステップ412、ステップ405)もある。
【0070】
また、図5のステップ403でLKF航跡がメモリトラックであり、EKF航跡を連続して選択している場合は角度観測値を用いていないため追尾精度が劣化する可能性がある。そのため、図7のように、EKF航跡を連続して選択している回数が閾値を超えた場合は、上記の式(27)〜式(33)で示す、航跡統合方法で航跡を統合する方法(ステップ413、ステップ414)もある。さらに、図6と図7の処理は、組み合わせて用いることも可能である。以上が統合選択器4の動作説明である。
【0071】
異常値判定器6は、測角処理部15から入力されるペア観測値に対して、システム航跡メモリ5から入力されるアップビート周波数とダウンビート周波数の情報と同一でないペアを異常値とみなして、追尾を開始させない。つまり、測角処理部15からのペア観測値がシステム航跡と同一でない場合には、そのペア観測値を異常値と判定して、この異常値については追尾を開始させない。それに加えて、システム航跡に用いられたペア観測値に付与されているアップとダウンの周波数ペアを優先的にペアリングするように信号処理器1内のビート周波数ペア選択部14に出力してもよい。
【0072】
以上のように、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、アップチャープ、ダウンチャープで得たビート周波数を直接入力して目標の位置と速度を更新するビート周波数追尾フィルタ2と、アップとダウンチャープのペアより得られる目標の距離、ドップラ速度、角度を入力して目標の位置と速度を更新するペア観測値用追尾フィルタ3を併用して、追尾航跡同士を統合もしくは選択する統合選択器4と、追尾航跡と相関のあったペアに基づき誤ったペアを判定する異常値判定器6とにより、従来のFMCWレーダを用いたレーダ装置に比べて追尾精度を向上させ、誤航跡発生を抑制することができる。
【0073】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、異常値判定器6が、追尾航跡と相関のあったペアを優先的にペアリングする候補として信号処理器1へ出力することにより、誤ペアの発生を抑えることができる。
【0074】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、ビート周波数追尾フィルタ2の追尾航跡の選択が続く場合、ペア観測値用追尾フィルタ3とビート周波数追尾フィルタ2の追尾航跡同士の相関がとれなくとも、残差が小さい航跡を選択することにより、追尾精度を高めることができる。
【0075】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、ビート周波数追尾フィルタ2の追尾航跡の選択が続き、かつペア観測値用追尾フィルタ3で相関がとれる観測値が無い場合、ペア観測値用追尾フィルタ3の追尾航跡を予測した航跡とビート周波数追尾フィルタ2の追尾航跡を統合することにより、目標追尾精度を高めることができる。
【0076】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際にあらかじめ定めたパラメータで重み付け統合することにより、演算負荷を低減することができる。
【0077】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に有色性を考慮して共分散交差法を用いて重み付け統合することにより、追尾精度を確保することができる。
【0078】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に最小二乗統合法を用いて重み付け統合することにより、パラメータを設定することなく追尾精度を確保することができる。
【0079】
また、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に各航跡の平滑誤差共分散行列のトレースを用いて重み付け統合することにより、演算負荷を低減することができる。
【0080】
さらに、実施の形態1によれば、FMCWレーダを用いたレーダ装置において、統合選択器4が、追尾航跡同士を統合する際に各航跡の追尾更新回数を用いて重み付け統合することにより、演算負荷を低減することができる。
【0081】
実施の形態2.
この発明の実施の形態2に係るレーダ装置について図8及び図9を参照しながら説明する。図8は、この発明の実施の形態2に係るレーダ装置の構成を示すブロック図である。
【0082】
図8において、この発明の実施の形態2に係るレーダ装置は、ビート周波数追尾フィルタ2A内に角度用追尾フィルタ26を追加したものである。
【0083】
図9は、この発明の実施の形態2に係るレーダ装置の角度用追尾フィルタの構成を示すブロック図である。
【0084】
図9において、角度用追尾フィルタ26は、予測部261と、角度変換部262と、相関部263と、平滑部264とが設けられている。
【0085】
つぎに、この実施の形態2に係るレーダ装置の動作について図面を参照しながら説明する。
【0086】
この実施の形態2に係るレーダ装置は、ペア観測値の角度をビート周波数追尾フィルタ2Aへ入力して追尾処理するものである。
【0087】
角度用追尾フィルタ26は、図9に示すように、観測値出力判定部21から出力される角度を入力として追尾処理を実施する。角度用追尾フィルタ26の予測部261の動作の説明は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。
【0088】
角度変換部262は、次の式(34)〜式(36)で示すように、追尾航跡を角度予測値θk|k−1と予測誤差分散Pθk|k−1へ変換する。
【0089】
【数15】
【0090】
相関部263は、角度変換部262から出力される予測値と観測値出力判定部21から出力されるペア観測値の相関処理を実施する。まず、時刻tkでのペア観測値zkが次の式(37)の不等式を満足するか判定する。式(37)でdθは判定閾値、Sθは次の式(38)で定義する目標の残差共分散である。
【0091】
【数16】
【0092】
相関部263は、相関なしとみなした場合は、平滑部264にペア観測値を出力せず、平滑部264は、上記の式(14)及び式(15)に示す、メモリトラック処理を行う。
【0093】
一方、相関部263は、相関ありとみなした場合は、平滑部264に角度観測値を出力し、目標の平滑値を更新する。
【0094】
【数17】
【0095】
そして、平滑部264は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。その他の処理は、上記の実施の形態1と同様のため省略する。
【0096】
以上のように、実施の形態2によれば、FMCWレーダを用いたレーダ装置において、ビート周波数追尾フィルタ2Aが、アップチャープ、ダウンチャープに加えペア観測値の角度を直接入力して目標の位置と速度を更新することによって、追尾精度を向上させることができる。
【0097】
実施の形態3.
この発明の実施の形態3に係るレーダ装置について図10及び図11を参照しながら説明する。図10は、この発明の実施の形態3に係るレーダ装置の構成を示すブロック図である。
【0098】
図10において、この発明の実施の形態3に係るレーダ装置は、信号処理器1B内に測角処理部15と同じ測角処理部16を追加するとともに、ビート周波数追尾フィルタ2B内に、アップチャープ用追尾フィルタ23とダウンチャープ用追尾フィルタ24の代わりに、アップチャープ角度用追尾フィルタ23Bとダウンチャープ角度用追尾フィルタ24Bを追加したものである。
【0099】
図11は、この発明の実施の形態3に係るレーダ装置のアップチャープ角度用追尾フィルタの構成を示すブロック図である。
【0100】
図11において、アップチャープ角度用追尾フィルタ23Bは、予測部231と、ビート周波数角度変換部232Bと、相関部233と、平滑部234とが設けられている。
【0101】
つぎに、この実施の形態3に係るレーダ装置の動作について図面を参照しながら説明する。
【0102】
この実施の形態3に係るレーダ装置は、ビート周波数毎に測角処理をして角度が得られる場合、この角度をビート周波数追尾フィルタ2Bへ入力して追尾処理するものである。
【0103】
アップチャープ角度用追尾フィルタ23Bは、図11に示すように、観測値出力判定部21から出力されるアップチャープのビート周波数とそれに付与される角度を入力として追尾処理を実施する。図11のアップチャープ角度用追尾フィルタ23Bの予測部231の動作は、アップチャープ用追尾フィルタ23の予測部231と同じであるため省略する。
【0104】
ビート周波数角度変換部232Bでは、追尾航跡からビート周波数予測値fuk|k−1とその予測誤差分散Puk|k−1、角度予測値θk|k−1とその予測誤差分散Pθk|k−1を算出する。算出式については、省略する。
【0105】
相関部233は、ビート周波数角度変換部232Bから出力される予測値とビート周波数、角度観測値の相関処理を実施する。まず、時刻tkでのビート周波数観測値fuoと角度観測値θoが次の式(41)の不等式を満足するか判定する。式(41)でdは判定閾値、Suは上記の式(13)、Sθは上記の式(38)で定義する残差共分散である。
【0106】
【数18】
【0107】
相関部233は、相関なしとみなした場合は、平滑部234にビート周波数、角度観測値を出力せず、平滑部234は、上記の式(14)及び式(15)で示す、メモリトラック処理を行う。
【0108】
一方、相関部233は、相関ありとみなした場合は、平滑部234にビート周波数、角度観測値を出力し、目標の平滑値を更新する。
【0109】
【数19】
【0110】
次に、平滑部234は、平滑ベクトル、平滑誤差分散、時刻をサブ航跡メモリ25へ出力し、その平滑ベクトル、平滑誤差分散をサブ航跡とする。サブ航跡メモリ25は、追尾航跡入力判定部22へサブ航跡を出力する。その他の処理は、上記の実施の形態1と同様のため省略する。
【0111】
以上のように、実施の形態3によれば、FMCWレーダを用いたレーダ装置において、ビート周波数追尾フィルタ2Bが、アップチャープ、ダウンチャープに加え、それに付与される角度を直接入力して目標の位置と速度を更新することによって、追尾精度を向上させることができる。
【符号の説明】
【0112】
1、1B 信号処理器、2、2A、2B ビート周波数追尾フィルタ、3 ペア観測値用追尾フィルタ、4 統合選択器、5 システム航跡メモリ、6 異常値判定器、11 受信部、12 AD変換部、13 ビート周波数検出部、14 ビート周波数ペア選択部、15 測角処理部、16 測角処理部、21 観測値出力判定部、22 追尾航跡入力判定部、23 アップチャープ用追尾フィルタ、23B アップチャープ角度用追尾フィルタ、24 ダウンチャープ用追尾フィルタ、24B ダウンチャープ角度用追尾フィルタ、25 サブ航跡メモリ、26 角度用追尾フィルタ、31 予測部、32 相関部、33 平滑部、231 予測部、232 ビート周波数変換部、232B ビート周波数角度変換部、233 相関部、234 平滑部、261 予測部、262 角度変換部、263 相関部、264 平滑部。
【特許請求の範囲】
【請求項1】
周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する受信部と、
前記受信信号と前記送信信号とを混合してビート信号を生成し、前記送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、前記第1のビート周波数分布の第1の周波数ピークを特定し、前記送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、前記第2のビート周波数分布の第2の周波数ピークを特定するビート周波数検出部と、
前記第1のビート周波数分布の第1の周波数ピークと前記第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出するビート周波数ペア選択部と、
前記ペア観測値に基づいて目標の角度を算出する測角処理部と、
既存の追尾航跡を用いて、前記距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新するペア観測値用追尾フィルタと、
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタと、
前記ペア観測値用追尾フィルタ及び前記ビート周波数追尾フィルタの追尾航跡を統合もしくは一方を選択してシステム航跡とする統合選択器と、
前記システム航跡を記憶するシステム航跡メモリと、
前記測角処理部からのペア観測値が前記システム航跡メモリに記憶されたシステム航跡と同一でない場合には、前記ペア観測値を異常値と判定して、この異常値については追尾を開始させない異常値判定器と
を備えたことを特徴とするレーダ装置。
【請求項2】
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタの代わりに、
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークもしくはペア観測値の角度から追尾航跡の位置及び速度を更新するビート周波数追尾フィルタを備えた
ことを特徴とする請求項1記載のレーダ装置。
【請求項3】
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタの代わりに、
既存の追尾航跡を用いて、前記第1の周波数ピーク及び前記第1の周波数ピークに付与された角度もしくは前記第2の周波数ピーク及び前記第2の周波数ピークに付与された角度から追尾航跡の位置及び速度を更新するビート周波数追尾フィルタを備えた
ことを特徴とする請求項1記載のレーダ装置。
【請求項4】
前記異常値判定器は、システム航跡と相関のとれたペア観測値については、優先的にペアリングする候補として前記ビート周波数ペア選択部へ出力する
ことを特徴とする請求項1から請求項3までのいずれかに記載のレーダ装置。
【請求項5】
前記統合選択器は、前記ビート周波数追尾フィルタの追尾航跡の選択が続く場合、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡同士の相関がとれなくとも、残差が小さい航跡を選択する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ装置。
【請求項6】
前記統合選択器は、前記ビート周波数追尾フィルタの追尾航跡の選択が続き、かつ前記ペア観測値用追尾フィルタで相関がとれる観測値が無い場合、前記ペア観測値用追尾フィルタの追尾航跡を時間予測した航跡と前記ビート周波数追尾フィルタの追尾航跡を統合する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ装置。
【請求項7】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際にあらかじめ定めたパラメータで重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項8】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に共分散交差法を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項9】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に最小二乗統合法を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項10】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に各航跡の平滑誤差共分散行列のトレースを用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項11】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に各航跡の追尾更新回数を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項1】
周波数が一定の変調幅で周期的に増減する送信信号が目標で反射された信号を受信信号として受信する受信部と、
前記受信信号と前記送信信号とを混合してビート信号を生成し、前記送信信号の周波数が上昇するアップチャープ時のビート信号から第1のビート周波数分布を求め、前記第1のビート周波数分布の第1の周波数ピークを特定し、前記送信信号の周波数が下降するダウンチャープ時のビート信号から第2のビート周波数分布を求め、前記第2のビート周波数分布の第2の周波数ピークを特定するビート周波数検出部と、
前記第1のビート周波数分布の第1の周波数ピークと前記第2のビート周波数分布の第2の周波数ピークのペア観測値を作成し、目標の距離とドップラ速度を算出するビート周波数ペア選択部と、
前記ペア観測値に基づいて目標の角度を算出する測角処理部と、
既存の追尾航跡を用いて、前記距離、ドップラ速度及び角度から成るペア観測値から追尾航跡の位置及び速度を更新するペア観測値用追尾フィルタと、
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタと、
前記ペア観測値用追尾フィルタ及び前記ビート周波数追尾フィルタの追尾航跡を統合もしくは一方を選択してシステム航跡とする統合選択器と、
前記システム航跡を記憶するシステム航跡メモリと、
前記測角処理部からのペア観測値が前記システム航跡メモリに記憶されたシステム航跡と同一でない場合には、前記ペア観測値を異常値と判定して、この異常値については追尾を開始させない異常値判定器と
を備えたことを特徴とするレーダ装置。
【請求項2】
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタの代わりに、
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークもしくはペア観測値の角度から追尾航跡の位置及び速度を更新するビート周波数追尾フィルタを備えた
ことを特徴とする請求項1記載のレーダ装置。
【請求項3】
既存の追尾航跡を用いて、前記第1の周波数ピークもしくは前記第2の周波数ピークから追尾航跡の位置及び速度を更新するビート周波数追尾フィルタの代わりに、
既存の追尾航跡を用いて、前記第1の周波数ピーク及び前記第1の周波数ピークに付与された角度もしくは前記第2の周波数ピーク及び前記第2の周波数ピークに付与された角度から追尾航跡の位置及び速度を更新するビート周波数追尾フィルタを備えた
ことを特徴とする請求項1記載のレーダ装置。
【請求項4】
前記異常値判定器は、システム航跡と相関のとれたペア観測値については、優先的にペアリングする候補として前記ビート周波数ペア選択部へ出力する
ことを特徴とする請求項1から請求項3までのいずれかに記載のレーダ装置。
【請求項5】
前記統合選択器は、前記ビート周波数追尾フィルタの追尾航跡の選択が続く場合、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡同士の相関がとれなくとも、残差が小さい航跡を選択する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ装置。
【請求項6】
前記統合選択器は、前記ビート周波数追尾フィルタの追尾航跡の選択が続き、かつ前記ペア観測値用追尾フィルタで相関がとれる観測値が無い場合、前記ペア観測値用追尾フィルタの追尾航跡を時間予測した航跡と前記ビート周波数追尾フィルタの追尾航跡を統合する
ことを特徴とする請求項1から請求項4までのいずれかに記載のレーダ装置。
【請求項7】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際にあらかじめ定めたパラメータで重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項8】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に共分散交差法を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項9】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に最小二乗統合法を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項10】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に各航跡の平滑誤差共分散行列のトレースを用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【請求項11】
前記統合選択器は、前記ペア観測値用追尾フィルタと前記ビート周波数追尾フィルタの追尾航跡を統合する際に各航跡の追尾更新回数を用いて重み付け統合する
ことを特徴とする請求項1から請求項6までのいずれかに記載のレーダ装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−256083(P2010−256083A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−104154(P2009−104154)
【出願日】平成21年4月22日(2009.4.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月22日(2009.4.22)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]