
レーダ装置
【課題】衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供する。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【解決手段】レーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置に関する。詳細には、レーダ装置において、衝突する危険度の高い物標を判定して分かり易く表示するための構成に関する。
【背景技術】
【0002】
一般的なレーダ装置において、レーダ映像を表示する際には、受信したエコーの強度に応じた表示色で物標を表示する。このようなレーダ装置においては、画面に表示されている物標が航海の障害となるか否か(衝突の危険があるか否か)は、オペレータがレーダ映像を数スキャンの間見て、経験によって判断していた。
【0003】
しかし、オペレータがレーダ映像に不慣れである場合には、表示されている物標が航海の障害となるか否かを判断することが難しかった。また、オペレータがレーダ映像に精通している場合であっても、少なくとも数スキャンの間画面を見続けない限り、衝突危険度を判断することができない。
【0004】
この点、特許文献1は、衝突危険度の高い他船は視認性を高く表示し、衝突危険度の低い他船は視認性を低く表示するように構成した他船表示装置を開示する。特許文献1は、これにより、視認性が高く、衝突回避という目的に適った表示を行うことができるとする。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−48595号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1は、他船の情報を検知する手段として、AIS(船舶自動識別装置)及びARPA(自動衝突予防支援装置)を用いている。
【0007】
ARPAは、過去のレーダ映像の推移から物標の移動ベクトル(速度及び移動方向)を検出する技術である。しかし、このARPAは信号処理負荷が大きいため、捕捉、追尾できる物標の点数に制限があるという課題があった。また、過去の数スキャン分のレーダ映像から物標の移動情報を検出するため、物標が移動方向や速度を変更したことを検出するまでに時間が掛かるという問題があった。更に、物標の近傍に海面反射等の不規則なエコーが現れた場合、物標の捕捉が海面反射等に乗り移ってロストしてしまうという問題もあった。
【0008】
一方、AISは、自船の位置情報や航行情報等を無線通信によって定期的に送信するとともに、他船から前記情報を受信して必要な情報を抽出する技術である。しかし、他船がAISを搭載していない場合は当該他船の情報を検知することができない。また、通信頻度が決められているため、他船の情報を即座に取得することができない。
【0009】
以上のようであるから、特許文献1の構成では、衝突危険度の高い物標を確実に把握し、リアルタイムで表示することが困難であった。
【0010】
本願発明は以上の事情に鑑みてされたものであり、その主要な目的は、衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0011】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0012】
本発明の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、レーダアンテナと、表示器と、速度推定部と、危険度検出部と、を備える。前記レーダアンテナは、水平面内で回転しながら信号の送受信を繰り返すように構成される。前記表示器は、自装置周囲の物標の位置を示すレーダ映像を表示する。前記速度推定部は、自装置からの電波の放射方向成分における自装置と前記物標との相対速度を推定する。前記危険度検出部は、前記速度推定部が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める。また、前記速度推定部は、前記レーダアンテナが今回受信したエコーと、当該レーダアンテナが直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出する。そして、前記表示器は、前記レーダ映像を表示する際に、前記危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【0013】
これにより、危険度によって物標の表示方法を異ならせることができるので、例えば経験の浅いオペレータであっても、危険な物標を即座に判断することができる。また、自装置からの電波の放射方向成分における自装置と前記物標との相対速度に基づいて、物標が自装置に対してどの程度の速度で接近しているかを判断することができるため、例えば高速で接近してくる物標のように特に危険な物標を適切に表示して、オペレータに注意を喚起することができる。
【0014】
更に、上記のようにエコーの位相変化を観測することにより、ドップラー周波数を求め、これに基づいて物標の速度を検出することができる。従って、数スキャンの間レーダ映像を観測する必要も、他船からの通信を待機する必要も無く、即座に物標の速度を検出することができる。また、レーダ映像内の物標を捕捉して速度を検出する構成では無いので、複雑な演算処理も必要無く、物標の捕捉が失われて速度が検出できなくなることも無い。従って、多数の物標の移動速度を確実に検出することができるので、危険な物標を危険度検出部において確実に検出することができる。更に、ドップラー周波数から求めることができる物標の移動速度は、電波の放射方向における相対速度である。従って、本発明の構成によって検出した物標の移動速度に基づいて、自装置に対して物標がどの程度の速度で接近しているのかを簡単に判定することができる。また、物標の移動速度が遅い場合、観測できるほどのドップラー周波数が生じないため、1回の送受信で周波数変化を観測して物標の速度を検出することが困難となる。この点、上記のように2つのエコー間での位相変化を見ることにより、遅い物標であっても速度を検出することができる。
【0015】
上記のレーダ装置においては、以下のように構成されることが好ましい。即ち、このレーダ装置は、少なくとも物標からのエコー信号を検出する種類推定部を備える。そして、前記危険度検出部は、前記種類推定部が検出した物標からのエコー信号と、前記速度推定部が推定した前記相対速度と、に基づいて、当該物標の危険度を求める。
【0016】
このように、物標からのエコーを検出することにより、例えば海面反射のように衝突の危険が無い物標と、物標のように衝突の危険がある物標とを適切に区別して表示できるため、信頼性に優れる。
【0017】
前記のレーダ装置においては、以下のように構成されることが好ましい。即ち、前記表示器は、前記レーダ映像を表示する際に、前記物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能である。
【0018】
これにより、表示器に表示された色によって、オペレータが物標の危険度を直感的に把握することができる。また、表示器に表示された色の濃さによって、オペレータがエコーの強度を直感的に把握することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係るレーダ装置の主要な構成を示すブロック図。
【図2】直交検波を説明する図。
【図3】(a)海面反射領域基準画素に基づいて拡大海面反射領域を決定する様子を説明する図。(b)合成拡大海面反射領域を説明する図。
【図4】(a)連続性判定基準領域を設定した様子を説明する図。(b)物標の種類によるエコーの空間的な連続性の違いを説明する図。
【図5】1つの物標に対する今回のスイープと直前のスイープにおける送受信の様子を例示する図。
【発明を実施するための形態】
【0020】
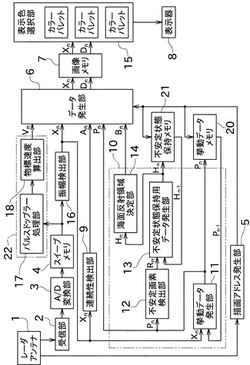
次に、図面を参照して本発明の実施形態について説明する。図1は、本実施形態に係る船舶用レーダ装置の主要構成を示すブロック図である。なお、本実施形態では船舶用のレーダ装置として説明するが、本発明のレーダ装置の用途が船舶用に限られるものではない。
【0021】
本実施形態のレーダ装置が備えるレーダアンテナ1は、鋭い指向性を持った信号(パルス状電波)を放射可能であるとともに、自装置周囲にある物標からのエコー(反射信号)を受信するように構成されている。また、レーダアンテナ1は、所定の回転周期で水平面内を回転しながら、前記信号の送受信を繰り返し行うように構成されている。
【0022】
表示器8は、CRT、LCD等であり、グラフィック表示可能なラスタスキャン式の表示装置として構成されている。
【0023】
ここで、放射信号を放射してからエコーが返ってくるまでに掛かる時間は、レーダアンテナ1から物標までの距離に比例する。従って、放射信号を放射してから受信信号を受信するまでの時間を動径r、当該電波の送受信を行ったときのアンテナ角度を偏角θとすることにより、物標の位置をレーダアンテナ1を中心とした極座標系で取得することができる。この極座標系で取得された物標の位置を平面上にプロットすることにより、レーダ映像を得ることができる。本実施形態のレーダ装置は、前記レーダ映像を前記表示器8に表示することにより、自装置周囲の物標の様子を確認できるように構成したものである。
【0024】
なお、レーダアンテナ1は、物標からの反射信号以外にも、海面反射等の不要エコーを受信する。また、レーダアンテナ1が他船のレーダ信号を受信してしまう場合(干渉信号)もある。また、当該レーダアンテナ1が受信した信号にはホワイトノイズが含まれる。従って、前記表示器8には、物標の他にも、海面反射、干渉信号、ホワイトノイズ等がプロットされて表示される場合がある。そこで、以下の説明では、上記の事情を考慮して、物標、海面反射、干渉エコー、ホワイトノイズ等を、「受信信号」と総称する場合がある。
【0025】
本実施形態のレーダ装置は、表示器8にレーダ映像を表示する際に、物標の危険度等を推定し、当該物標の表示色を前記危険度等に応じて異ならせることができるように構成されている。これにより、レーダ装置のオペレータは、危険な物標を直感的に把握することができる。なお、物標の危険度を推定して色分けを行うための構成については、後に詳細に説明する。
【0026】
次に、エコーを受信して当該エコーのデータを取得するための構成について説明する。前記レーダアンテナ1がエコーを受信すると、受信信号が受信部2に出力され、A/D変換部3によってデジタルデータに変換された後、スイープメモリ4に一時的に記憶されるように構成されている。以下、各構成について説明する。
【0027】
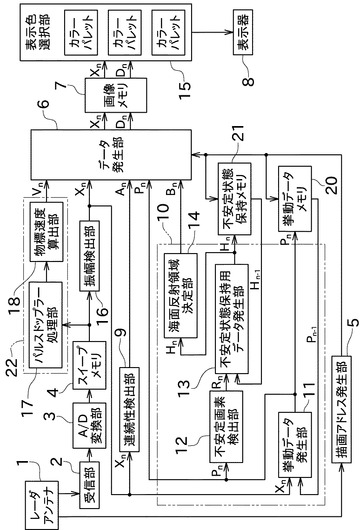
前記受信部2は、レーダアンテナ1からの受信信号を検波して増幅するように構成されている。本実施形態において、受信部2は、受信信号の振幅及び位相の情報を取得するために、直交検波(IQ位相検波)を行っている。受信部2において直交検波を行うことにより、I信号とQ信号からなる複素信号を得る。以下、直交検波について図2を参照して簡単に説明する。
【0028】
ここで、レーダアンテナ1が放射する放射信号(パルス状電波)の搬送波が、周波数f0のコサイン波であるとして説明する。この場合、放射信号を放射してからの時間をt、受信部2に入力される受信信号(エコー)の振幅をX(t)とすると、当該エコーの波形S(t)は、式(1)で表現することができる。ここで、φ(t)は、放射信号の搬送波に対する、受信エコーの搬送波の位相である(以下、単に位相という)。
【数1】

【0029】
図2に示すように、この受信信号S(t)は、受信部2に受信された後に2系統に分岐させられる。そして一方の受信信号S(t)に、放射信号の搬送波と同一周波数で同一位相の参照信号2cos(2πf0t)を積算して合成することにより、以下の式(2)で表現される信号を得る。また、受信信号S(t)を分岐させた他方に、放射信号の搬送波と同一周波数で位相を90°ズラした参照信号−2sin(2πf0t)を積算して合成することにより、以下の式(3)で表現される信号を得る。
【数2】
【0030】
式(2)及び式(3)の右辺第1項(2倍周波数成分)はローパスフィルタ(LPF)によって除去される。これにより、受信部2からは、式(4)に示すI信号、及び式(5)に示すQ信号が出力される。
【数3】
【0031】
アナログ信号である前記I信号及びQ信号は、A/D変換部3に入力される。A/D変換部3は、このI信号及びQ信号をサンプリングし、複数ビットのデジタルデータ(IQ受信データ)に変換してスイープメモリ4に出力する。なお、上記のようにアナログでI信号及びQ信号を生成する方式のほか、受信信号を直接サンプリングした後に、デジタルでI信号及びQ信号を生成する方式でも良い。
【0032】
スイープメモリ4は、前記IQ受信データを1スイープ分リアルタイムで記憶することができるバッファである。なお、「スイープ」とは、信号を送信してから次の信号を送信するまでの一連の動作をいい、「1スイープ分の受信データ」とは、信号を送信した後、次の信号を送信するまでの期間に受信したデータをいう。
【0033】
前記1スイープ分のデータは、スイープメモリ4の先頭アドレスから順次記憶されていくように構成されている。ここで、スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データのI信号データをIn、Q信号データをQnとする。当該n番目のデータをサンプリングした時のエコーの強度(振幅)をXn、位相をφnとすると、In及びQnは以下の式で表すことができる。
【数4】
【0034】
次に、表示器8に表示するレーダ映像の画像データを生成するための構成について説明する。表示器8はラスタスキャン式の表示装置として構成されており、この表示器8に表示させるための画像データは画像メモリ7に記憶されている。この画像メモリ7に記憶されている画像データは複数の画素からなるラスタデータであり、表示器8のラスタ走査に同期して高速で読み出されて表示色選択部15(後述)へ転送される。
【0035】
前記画像データにおいて、各画素は、例えば船首方向をY軸、船幅方向をX軸とするXY直交座標系で配列して記憶されている。各画素のデータは複数ビットからなり、当該各画素には、エコー強度Xnと、エコー危険度Dnと、を示すデータがそれぞれ記憶されている。表示器8のラスタ走査に同期してこの画像データを読み出す際に、例えば、エコー強度Xnが強い画素は濃い色で表示し、エコー強度Xnが弱い画素は薄い色で表示することにより、水平面上における自装置周囲のエコーの様子(レーダ映像)を表示器8に表示することができる。なお、エコー危険度Dnについては後述する。
【0036】
各画素のエコー強度Xnを算出するための構成について説明する。バッファであるスイープメモリ4は、IQ受信データが新たに書き込まれると、次のスイープによって当該IQ受信データが上書きされてしまう前に、振幅検出部16及びパルスドップラー処理部17(後述)に対してIQ受信データを順次出力する。
【0037】
振幅検出部16は、IQ受信データが入力されると、I信号とQ信号をベクトル合成することにより当該IQ受信データのエコー強度を検出する。ここで、前記式(6)及び式(7)より、スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データのエコー強度Xnは、以下の式(8)によって求めることができる。
【数5】
【0038】
振幅検出部16が求めたエコー強度Xnは、後述のデータ発生部6を介して画像メモリ7に出力され、対応するアドレスに記憶される。エコー強度Xnを画像メモリ7のどのアドレスに記憶するか(即ち、現在画像データのどの画素を処理しているのか)は、描画アドレス発生部5によって決定される。なお、このエコー強度Xnは、後述の挙動データ発生部11及び連続性検出部9にも出力されている。
【0039】
描画アドレス発生部5には、所定方向(例えば船首方向)を基準としたスイープ角度データ(レーダアンテナ1の角度θを示すデータ)がレーダアンテナ1から入力されている。描画アドレス発生部5は、レーダアンテナ1の角度θと、スイープメモリ4からのIQ受信データの読み出し位置nとから、当該IQ受信データに対応する画素を指定するアドレスを生成する。具体的には、描画アドレス発生部5は、以下の式(9)及び式(10)の演算を実現するハードウェアにより構成される。ここで、X,Yは、画像メモリ7に記憶されている画像データの画素を指定するアドレスである。また、Xs,Ysは、画像メモリに記憶されている画像データにおいて、スイープの中心位置(レーダアンテナ1の位置)に対応する画素を指定するアドレスである。
【数6】
【0040】
エコー強度Xnがデータ発生部6から画像メモリ7に出力される際には、当該画像メモリ7のアドレス指定部に、上記アドレスX,Yが入力される。これにより、極座標系で取得される物標エコーの位置がXY直交座標系に変換されて、当該物標エコーの位置に対応する座標X,Yの位置の画素に、エコー強度Xnのデータを記憶することができる。結果として、エコー強度を物標エコーの位置に応じて平面上にプロットした画像データが生成されるので、これに基づいてレーダ映像を表示器8に表示することができる。なお、描画アドレス発生部5が出力する画素のアドレスは、後述の挙動データメモリ20及び不安定状態保持メモリ21にも入力されている。
【0041】
次に、物標からのエコーと、それ以外のエコーとを判別するための構成について説明する。まず、エコーの時間的な連続性を観測することにより海面反射によるエコーを判別する構成を説明する。
【0042】
周知のように、船舶用レーダにおいては、自船周囲の海面からのエコーが受信される。この海面反射は物標からのエコーと区別することが好ましい。ここで、海面反射によるエコーは、スキャン毎に同じ位置に出現しないで規則性無く検出される。これを逆に考えれば、ある画素においてエコーが時間的な連続性が無く不規則に検出される場合は、当該エコーは海面反射であると判断することができる。本実施形態のレーダ装置は、このように検出エコーが不安定な画素に基づいて海面反射領域を検出するための、海面反射領域検出部10を備えている。この海面反射領域検出部10は、挙動データ発生部11と、不安定画素検出部12と、不安定状態保持用データ発生部13と、海面反射領域決定部14と、を含んでいる。
【0043】
まず、挙動データ発生部11について説明する。前記振幅検出部16によってエコー強度Xnが算出され、前記描画アドレス発生部5によって前記エコー強度Xnを記憶する画素のアドレスが決定されると、挙動データ発生部11は、当該画素における過去数スキャンにわたるエコーの有無を表現する挙動データPnを求め、挙動データメモリ20に出力するように構成されている。
【0044】
挙動データメモリ20は、画像メモリ7のアドレスと対応するように直交座標系アドレスが設定されており、画像メモリ7の各画素と1対1に対応して挙動データPnを記憶する記憶媒体である。
【0045】
この挙動データPnは、複数ビットからなり、エコーの有無を示すエコー検出フラグを、過去数スキャンにわたって記憶したデータである。例えば挙動データメモリ20を各画素8bitで構成した場合、過去8スキャン分のエコー検出フラグを挙動データPnによって表現することができる。具体的には、例えばある画素の挙動データPnが「00000011」であった場合、直近の2スキャンでは当該画素の位置でエコーが検出されたが、それ以前の6スキャンではエコーが検出されなかったことを示す。なお、「スキャン」とは、電波の送受信を行いながらアンテナが1回転することにより、自装置の周囲を360°にわたってスイープすることをいう。
【0046】
前記挙動データPnを生成するために、挙動データ発生部11は以下の処理を行う。まず、挙動データ発生部11は、振幅検出部16から入力されてくるエコー強度Xnが、予め設定した検出閾値以上であるかどうかを判定する。検出閾値は、例えば検出したホワイトノイズレベルに所定のオフセットを加算したものが用いられる。挙動データ発生部11は、今回のエコー強度Xnが検出閾値以上であれば、「1」からなるエコー検出フラグを生成し、今回のエコー強度Xnが検出閾値未満であれば、「0」からなるエコー検出フラグを生成する。
【0047】
続いて、挙動データ発生部11は、挙動データメモリ20から前回の挙動データPn-1を読み出す。このとき、挙動データメモリには現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、現在処理している画素の挙動データPn-1が読み出される。次に、挙動データ発生部11は、前回の挙動データPn-1を1段階左シフトし、最下位ビットに今回のエコー検出フラグを出力して、今回の挙動データPnを生成する。最後に、今回の挙動データPnを挙動データメモリに出力する。このとき、挙動データメモリには、今回処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該画素の前回の挙動データPn-1が今回の挙動データPnによって上書きされる。以上により、今回を含む過去8スキャン分の挙動データが記憶される。また、挙動データ発生部11から出力された今回の挙動データPnは、不安定画素検出部12及びデータ発生部6へ出力される。
【0048】
不安定画素検出部12は、挙動データ発生部11から挙動データPnが入力されると、当該挙動データPnの隣り合うビット間での状態変化の数を不安定度として算出する。即ち、隣り合うビット(例えば第0ビットと第1ビットや、第6ビットと第7ビット)間で、「1」から「0」へ変化したり、「0」から「1」へ変化する回数を検出する。例えば、挙動データPnが「11111111」や「00000000」だった場合は不安定度を「0」とし、「10101010」だった場合は不安定度を「7」とする。
【0049】
不安定画素検出部12は、不安定度を算出すると、予め設定した不安定状態検出閾値と比較して、不安定状態検出データRnを生成する。例えば不安定度「4」を不安定状態検出閾値とした場合、不安定度「7」のときはRn=1とし、不安定度「1」のときはRn=0とする。不安定画素検出部12は、不安定状態検出データRnを不安定状態保持用データ発生部13へ出力する。
【0050】
不安定状態保持用データ発生部13は、現在処理している画素の不安定度を示す不安定状態保持用データHnを生成し、不安定状態保持メモリ21に出力する。
【0051】
不安定状態保持メモリ21は、画像メモリ7のアドレスと対応するように直交座標系アドレスが設定されており、画像メモリ7の各画素と1対1に対応して不安定状態保持用データHnを記憶する記憶媒体である。
【0052】
不安定状態保持用データ発生部13は、不安定画素検出部12から不安定状態検出データRnが入力されると、不安定状態保持メモリ21から前回の不安定状態保持用データHn-1を読み出す。このとき、不安定状態保持メモリ21には現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、現在処理している画素の不安定状態保持用データHn-1が読み出される。
【0053】
ここで、以下では、不安定状態保持メモリ21が各画素4ビットで構成されている場合(0〜15の範囲の整数を記憶できる場合)の例で説明する。不安定状態保持用データ発生部13は、Rn=1であった場合、現在処理している画素が不安定状態であると判断して、「15」からなる不安定状態保持用データHnを生成する。一方、Rn=0であった場合、当該画素は安定状態であると判断して、前回の不安定状態保持用データHn-1から1を引いた値を今回の不安定状態保持用データHnとする。また、当該画素が安定状態(Rn=0)で、かつ前回の不安定状態保持用データHn-1が0だった場合は、そのままHn=0とする。
【0054】
最後に、不安定状態保持用データ発生部13は、今回の不安定状態保持用データHnを不安定状態保持メモリ21に出力する。このとき、不安定状態保持メモリ21には、今回処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該画素の前回の不安定状態保持用データHn-1が今回の不安定状態保持用データHnによって上書きされる。
【0055】
これにより、各画素が、少なくとも今回を含めて過去16スキャンにわたって安定状態であったか否かを記憶することができる。即ち、Hn=0であれば、当該画素が、少なくとも今回を含めた過去16スキャンの間はRn=0(安定状態)だったと判断できる。一方、Hn≠0であれば、今回を含めた過去16スキャンの間にRn=1(不安定状態)だったことがあると判断できる。
【0056】
このようにして不安定状態保持用データHnを求めるのは、以下のような理由による。即ち、海面反射は、海況、風向き、アンテナ高さ、STC(海面反射除去処理)等の調整により変化し、更に、自船からの距離が離れるに従って弱くなる。このため、海面反射の境界は明確に区切ることができず、不安定状態から一時的に安定状態になったとしても、海面反射である確率は高い。この点、上記のようにして求めた不安定状態保持用データHnに基づいて海面反射か否かを判断することにより、一時的に安定状態となった画素を海面反射ではないと判定してしまうことを防止することができる。
【0057】
前記不安定状態保持用データHnは、海面反射領域決定部14に出力される。海面反射領域決定部14は、入力された不安定状態保持用データがHn≠0であれば、当該不安定状態保持用データHnに対応する画素は海面反射の種(たね)であると判定し、当該画素を海面反射領域基準画素として検出する。一方、海面反射領域決定部14は、Hn=0の場合(現在処理している画素が海面反射の種ではない場合)であっても、当該画素の近傍に位置する画素が海面反射の種である場合には、現在処理している画素は海面反射領域内であると判定する。
【0058】
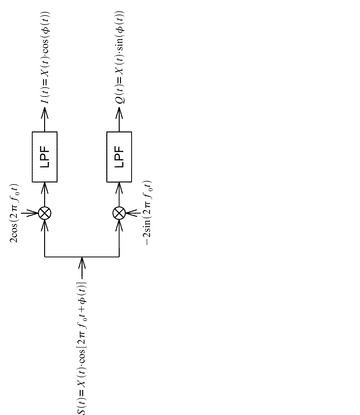
以下、図3を参照して具体的に説明する。海面反射領域決定部14は、図3(a)に示すように海面反射領域基準画素401を検出すると、距離r方向及びスイープ回転方向(レーダアンテナ1の回転方向)θへ海面反射領域を拡大させるようにして、直交座標系の所定数の画素を選択して拡大海面反射領域410を決定する。この際、海面反射領域決定部14は、拡大海面反射領域410において、海面反射領域基準画素401が、スイープの中心位置(レーダアンテナ1の位置)に距離r方向で最も近く、スイープ回転方向θに対して最も起点側となるようにして、前記拡大海面反射領域410を設定する。
【0059】
このような拡大海面反射領域の設定は、海面反射領域決定部14が不安定状態保持用データHn≠0を受け付けて、海面反射領域基準画素が検出される毎に行われる。例えば図3(b)においては、複数の海面反射領域基準画素401,402,403,404が検出されている。このような場合、海面反射領域決定部14は、海面反射領域基準画素401に基づく拡大海面反射領域410、海面反射領域基準画素402に基づく拡大海面反射領域420、海面反射領域基準画素403に基づく拡大海面反射領域430、海面反射領域基準画素404に基づく拡大海面反射領域440を組み合わせ、合成拡大海面反射領域400を設定する。
【0060】
海面反射領域決定部14は、現在処理している画素が、合成拡大海面反射領域400に該当する画素であるかどうかを示す海面反射領域データBnを生成し、データ発生部6へ出力する。具体的には、海面反射領域決定部14は、現在処理している画素が合成拡大海面反射領域400内の画素であれば、海面反射領域データBn=1を生成し、合成拡大海面反射領域400外の画素であれば、海面反射領域データBn=0を生成して、データ発生部6へ出力する。
【0061】
上記のように構成したのは、海面反射の種の近傍は、やはり海面反射である可能性が高いためである。この点、上記のような処理とすることで、実際に海面反射の種と判定された画素のみでなく、当該画素近傍の他の画素(海面反射である可能性の高い画素)にも拡大して海面反射領域を設定することができるので、海面反射である可能性の高い画素を確実に検出することができる。
【0062】
次に、エコーの空間的な連続性を観測することにより、物標からのエコーと、ホワイトノイズ及び干渉信号と、を判別する構成について説明する。
【0063】
即ち、ホワイトノイズや干渉信号は空間的に不連続で検出される一方、物標からのエコーはある程度空間的に連続して検出される。従って、エコーの空間的な連続性を判断することによって、当該エコーが、物標からのエコーか、ノイズ等か、を判定することができる。以下、具体的に説明する。
【0064】
連続性検出部9には、振幅検出部16からエコー強度Xnが入力されている。また、連続性検出部9は、複数のエコー強度のデータ(エコー強度データ)を所定方位分記憶するバッファメモリを備えており、このバッファメモリに前記エコー強度データが順次記憶される。
【0065】
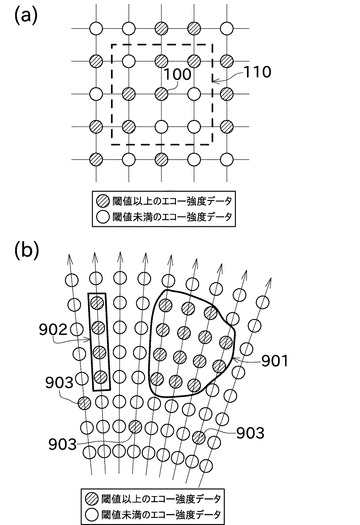
連続性検出部9は、振幅検出部16からエコー強度Xnが新しく入力されると、連続性の判定対象となる画素のエコー強度データの周囲に、連続性判定基準領域を設定する。例えば図4(a)においては、当該判定対象となるエコー強度データ100の近傍8個のデータを含む領域を連続性判定基準領域110としている。
【0066】
連続性検出部9は、連続性判定基準領域内に検出閾値以上のレベルを有するエコー強度データが何個あるかを検出し、その数を、前記判定対象となる画素の連続性データAnとする。例えば図4(a)の例では、連続性判定基準領域110内には閾値以上のエコー強度データが5つ存在するので、エコー強度データ100の位置にある画素の連続性データは、An=5とする。
【0067】
ここで、受信信号の種類によって連続性データAnが異なることを説明する。例えば、図4(b)に示すように、物標901は、検出閾値以上のレベルを有するエコー強度データが集まっているので、連続性データAnが大きくなる。一方、干渉信号902は、同一方向にのみ所定閾値以上のレベルを有するエコー強度データが存在するため、連続性データAnも小さくなる。また、ホワイトノイズ903も、単発で発生することが多いので、連続性データAnは小さくなる。従って、以上のように連続性データAnを求めることにより、物標からのエコーと、干渉信号及びホワイトノイズと、を判別することができる。
【0068】
次に、物標の移動速度を算出するための構成について説明する。
【0069】
前述のとおり、他船の移動速度を検出するためにAISやARPAを用いていた従来のレーダ装置においては、複数の物標の速度を確実かつリアルタイムで求めることができないという課題があった。
【0070】
そこで、本実施形態のレーダ装置は、エコーのドップラー周波数を推定し、前記ドップラー周波数に基づいて物標の移動速度を求めるように構成されている。この構成によれば、他船からのAIS情報の受信を待機したり、過去のレーダ映像の推移を複数スキャンにわたって観測したりしなくても、物標の移動速度を求めることができる。従って、多数の物標の移動速度を、確実かつ即座に求めることができる。
【0071】
また、AISやARPAによって求めることができるのは、水平面内における物標の絶対速度又は相対速度である。この点、ドップラー周波数に基づけば、自船に対する物標の相対速度のうち、電波の放射方向成分のみを検出することができる。従って、ドップラー周波数から求めた物標速度の値は、自船に対して物標がどれだけの速さで近づいてきているかの指標として用いることができるため、本実施形態のレーダ装置において特に有効である(詳しくは後述)。
【0072】
ただし、船舶の速度は比較的遅いため、発生するドップラー周波数も小さく、1回の送受信でドップラー周波数を検出するのは困難である。そこで、本実施形態ではパルスドップラー(パルスペア)法によってドップラー周波数を求めている。
【0073】
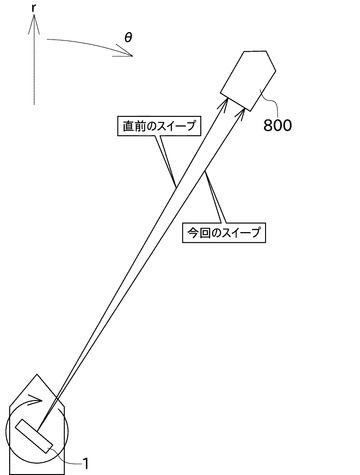
パルスドップラー法とは、適宜の間隔を空けてパルス状電波を放射し、同一物標からの受信パルスを2回取得して、2つの受信パルス間の位相変化を検出することにより物標のドップラー周波数を求めるものである。本実施形態ではレーダアンテナ1を回転させながらパルス状電波を放射しているため、2回の送信パルス間でパルスの送信方向は若干変化するが、例えば図5に示すように、直前のスイープと今回のスイープとの間で考えれば同じ物標800からのエコーを取得しているとみなすことができる。そこで本実施形態では、パルスヒット間(今回のスイープで受信したエコーと、直前のスイープで受信したエコーとの間)の位相変化に基づいて、物標からのエコーのドップラー周波数を検出するように構成している。
【0074】
以下、具体的に説明する。本実施形態のレーダ装置は、速度推定部22を備えている。この速度推定部22は、パルスドップラー処理部17と、物標速度算出部18と、から構成されている。
【0075】
前記パルスドップラー処理部17は、スイープメモリ4からIQ受信データが入力されると、当該IQ受信データに基づいて、エコーの搬送波の位相を求める。スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データの位相φnは、前記の式(6)及び式(7)より、以下の式(11)で求めることができる。
【数7】
【0076】
また、パルスドップラー処理部17は、直前のスイープにおける位相を記憶しておくために、1スイープ分の位相のデータを記憶可能な位相バッファメモリを備えている。この位相バッファメモリは、スイープメモリと1対1でアドレスが対応するように構成されている。
【0077】
パルスドップラー処理部17は、今回の位相φnを求めると、位相バッファメモリの先頭アドレスからn番目の位置から、直前のスイープで受信したエコーの位相φn’を読み出す。今回のスイープにおけるエコーの搬送波と、直前のスイープにおけるエコーの搬送波と、の間の位相変化Δφは、以下の式(12)で求めることができる。ここで、前述のように、今回のスイープと直前のスイープとでは同じ物標からのエコーを受信していると考えられるので、位相変化Δφは、前回のエコーを受信してから今回のエコーを受信するまでの間に、当該物標の移動によって発生した位相変化である。
【数8】
【0078】
物標の移動による位相変化は、以下の式(13)で表される。ここで、fdはドップラー周波数であり、ΔTはパルス状電波(放射信号)の送信間隔であり、PRFは前記パルス状電波のパルス繰返し周波数(Pulse Repetition Frequency、単位:Hz)である。従って、パルスドップラー処理部17は、式(14)の演算を行うことにより、ドップラー周波数fdを算出することができる。パルスドップラー処理部17は、ドップラー周波数fdを算出すると、当該ドップラー周波数fdを物標速度算出部18へ出力する。
【数9】
【0079】
物標速度算出部18は、ドップラー周波数fdが入力されると、物標の移動速度を求める。まず、物標速度算出部18は、ドップラー周波数fdに基づいて、自装置と物標との相対速度Vrを求める。物標速度算出部18は、ドップラー周波数fdと相対速度Vrとの間の関係式(15)によって、相対速度Vrを算出する。ここで、λは信号の搬送波の波長である。なお、式(15)で求めることができる相対速度Vrは、自装置(レーダアンテナ1)からの電波の放射方向成分における自装置と物標との相対速度(物標と自装置との間の直線距離方向の相対速度)である。
【数10】
【0080】
以上のように、ドップラー周波数から算出できる相対速度Vrは、自船に対する物標の相対速度のうち、電波の放射方向の成分のみである。従って、この相対速度Vrの値は、物標が自船に対してどれだけの速さで近づいてきているかの指標として用いることができる。本実施形態では物標の危険度を判定するために物標の移動速度を求めているので(詳細は後述)、物標が自船に対してどの程度の速度で接近しているかが把握できれば良い。即ち、本実施形態においては、水平面内における物標の相対速度や絶対速度の情報を取得する必要は無く、電波の放射方向(物標と自船との間の直線距離方向)の相対速度(即ち上記相対速度Vr)が分かれば十分である。
【0081】
このように、パルスドップラー法によって物標の移動速度を求める方法は、物標の危険度を求めるために必要な情報(電波の放射方向成分における当該物標の相対速度)を即座に(リアルタイムに)得ることができるという点で、物標の危険度判定に特に有効な手段であると言える。
【0082】
次に、物標速度算出部18は、ドップラー周波数fdに基づいて求めた相対速度Vrから、物標の移動速度を2ビットで表現する物標速度データVnを算出する。物標が自船から遠ざかっている時の相対速度Vrの値を負の値、近づいている時の相対速度Vrの値を正の値とすると、物標速度データVnは以下のように表現することができる。
【0083】
例えば、物標速度算出部18は、物標の相対速度Vrが−1kt未満の場合(物標が遠ざかっている場合)は、物標速度データをVn=0とする。また、物標の相対速度Vrが−1kt以上、1kt以下の場合は、物標速度データをVn=1とする。また、物標の相対速度Vrが1ktより大きい場合(物標が接近している場合)は、物標速度データをVn=2とする。以上のようにして求めた物標速度データVnは、データ発生部6に出力される。
【0084】
次に、物標の危険度を判定するための構成について説明する。物標の危険度は、データ発生部6によって判定される。従って、データ発生部6は、危険度検出部であるということができる。
【0085】
データ発生部6には、現在処理している画素についての、エコー強度Xn、連続性データAn、挙動データPn、海面反射領域データBn及び物標速度データVnが入力されている。
【0086】
データ発生部6は、まず、エコー強度Xn、連続性データAn、挙動データPn及び海面反射領域データBnに基づいて、現在処理している画素の位置に存在する受信信号の種類を判定する。従って、データ発生部6は、種類推定部であるということもできる。データ発生部6は、当該画素の受信信号の種類を、固定物標、移動物標、海面反射、その他(干渉やノイズなどの不要エコー)の4種類で判定する。以下、具体的に説明する。
【0087】
現在処理している画素のエコー強度Xnが所定閾値よりも小さい場合は、当該画素の位置には物標は存在しないと判断することができる。また例えば、エコー強度Xnの値が大きい場合であっても、連続性データAnの値が小さければ、その画素の受信信号はレーダ干渉やホワイトノイズであると判断できる。一方、海面反射領域データBnが「1」の場合は、その画素の受信信号は海面反射であると判断すれば良い。
【0088】
また、挙動データPnの各ビットに1が多ければ、そのデータは検出頻度が高いデータであり、即ち固定物標(陸地など)であると判断することができる。更に、現在処理している画素が海面反射でもレーダ干渉やホワイトノイズでも無く、挙動データPnの値が00000001や00000011であれば(即ち、最新の数スキャンでエコーが検出されている場合は)、そのデータは移動している物標(船舶など)であると判断することができる。
【0089】
データ発生部6は、現在処理している画素の受信信号の種類を判定すると、当該受信信号の種類を2ビットで表現するエコー種類判定結果Tnを生成する。以下、エコー種類判定結果Tnの判定の具体例を示す。例えば、Pnにおいて「1」のビットの数が6以上ある場合は、固定物標と判断して、Tn=3とする。また、Pnの値が「00000001」又は「00000011」であり、且つBn=0、且つAn>3の場合は、移動物標と判断して、Tn=2とする。また、Bn=1の場合は、海面反射であると判断して、Tn=1とする。一方、上記の場合にあてはまらない場合は、その他の信号(干渉信号やホワイトノイズ)であると判断して、Tn=0とする。
【0090】
続いて、データ発生部6は、エコー種類判定結果Tnと、物標速度データVnと、から、現在処理している画素の位置に存在する物標の危険度を2ビットで表現するエコー危険度Dnを生成する。例えば、物標速度データVn=2の場合(物標が接近していると判定された場合)であっても、受信信号の種類が海面反射であれば、その画素の物標に対する衝突の危険性は低いと判断できる。また、Vn=2であり、受信信号の種類が移動物標を示すのであれば、その画素の物標は危険度が高いと判断できる。
【0091】
以下、エコー危険度Dnの判定の具体例を示す。例えば、Tn=2又はTn=3であり、且つVn=2の場合は、当該物標に対する衝突の危険度が高いと判断して、Dn=2とする。また、Tn=2又はTn=3であり且つVn=1の場合、又は、Tn=0であり且つVn=2の場合は、当該物標に対する衝突の危険度は中程度であると判断して、Dn=1とする。また、Tn=0であり且つVn=1の場合、又はVn=0の場合、又はTn=1の場合は、当該物標に対する衝突の危険度は低いと判断して、Dn=0とする。
【0092】
データ発生部6は、上記のようにして現在処理している画素のエコー危険度Dnを求めると、当該エコー危険度Dn及びエコー強度Xnを画像メモリ7に出力する。このとき、前述のように、画像メモリ7には現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該現在処理している画素の位置に、エコー危険度判定結果Dn及びエコー強度Xnが記憶される。
【0093】
次に、エコー危険度及びエコー強度に応じて、表示器8の表示を色分けして表示するための構成について説明する。
【0094】
最初に、従来の構成について簡単に説明する。従来のレーダ装置においては、エコー強度が強い画素は赤、中間レベルの画素は黄、弱い画素は薄い緑、というように、エコー強度に応じて表示色を変えて表示する構成が知られている。しかし、この方法では、強いエコーを直感的に把握することはできるものの、当該エコーとの衝突の危険度が高いか低いかは、レーダ映像を見るだけでは即座に判定することができなかった。
【0095】
一方、特許文献1が開示する他船表示装置は、衝突危険度に応じて物標の位置を示すマークの表示方法を変える構成となっている。しかし、特許文献1の構成は、前記マークを表示する位置(即ち、物標の位置)を取得する必要があるため、探知画像から物標の位置を捕捉し、追尾する処理を行っている。従って、物標の数が多い場合、特許文献1の構成では、物標の位置を取得するための処理負荷が過大となって、全ての物標を捕捉できない場合があった。
【0096】
この点、本実施形態のレーダ装置は、以下のように構成されている。
【0097】
前述のように、画像メモリ7に記憶された画像データの各画素には、エコー危険度Dnとエコー強度Xnとが記憶されている。表示色選択部15は、表示器8のラスタ走査に同期して画像メモリ7から各画素データを読み出し、当該画素のエコー危険度Dnとエコー強度Xnに応じて表示色を決定し、前記表示器8に転送するように構成されている。
【0098】
具体的には、表示色選択部15は、各画素のデータ(エコー危険度Dn及びエコー強度Xn)と、当該画素を表示器8に表示する際の色を指定するRGB値と、を対応させるためのカラーパレットを有している。
【0099】
本実施形態において、表示色選択部15は、各画素のエコー危険度Dnに応じて色を異ならせるとともに、エコー強度Xnに応じて色の濃さを異ならせた表示色を選択するように構成されている。例えば、本実施形態ではエコー危険度Dnを3段階で判定しているので、画素の表示色を、エコー危険度Dnに応じて赤、黄、青の3段階で表示するとする。この場合、表示色選択部15は、赤、黄、青の3色について、濃淡を表現できるRGB値を格納したカラーパレットをそれぞれ用意しておく。
【0100】
そして、表示色選択部15は、表示器8のラスタ走査に同期して画像メモリ7から画素データ(当該画素のエコー強度Xn及びエコー危険度Dn)を読み出すと、前記カラーパレットを参照して当該画素の表示色を決定する。例えば表示色選択部15は、Dn=0のときは青のカラーパレット、Dn=1のときは黄のカラーパレット、Dn=2のときは赤のカラーパレットをそれぞれ参照する。これにより、エコー危険度に応じて、赤、黄、青の3段階でエコーを表示することができる。
【0101】
表示色選択部15は、エコー危険度Dnによって3色のカラーパレットの中から1つを選択すると、エコー強度Xnを引数として当該カラーパレットからRGB値を取得する。このとき、表示色選択部15は、Xnが大きい場合は濃い色のRGB値を、Xnが小さい場合は薄い色のRGB値を選択する。これにより、エコー強度Xnが大きい画素ほど目立つように表示することができる。
【0102】
表示色選択部15は、上記のようにして画素のRGB値を決定すると、表示器8に転送する。
【0103】
以上の処理により、簡単な処理で、エコー危険度Dn及びエコー強度Xnに応じた表示色で、エコーの様子を表示器8に表示することができる。また、例えば、エコー強度が強くてエコー危険度が高い画素(この場合は濃い赤色で表示される)ほど目立つように表示されるので、このような危険なエコーをオペレータが即座に判断することができる。
【0104】
以上で説明したように、本実施形態のレーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【0105】
これにより、危険度によって受信信号の表示方法を異ならせることができるので、例えば経験の浅いオペレータであっても、危険な物標を即座に判断することができる。また、自装置からの電波の放射方向成分における自装置と前記物標との相対速度に基づいて、物標が自装置に対してどの程度の速度で接近しているかを判断することができるため、例えば高速で接近してくる物標のように特に危険な物標を適切に表示して、オペレータに注意を喚起することができる。
【0106】
更に、上記のようにエコーの位相変化を観測することにより、ドップラー周波数を求め、これに基づいて物標の速度を検出することができる。従って、数スキャンの間レーダ映像を観測する必要も、他船からの通信を待機する必要も無く、即座に物標の速度を検出することができる。また、レーダ映像内の物標を捕捉して速度を検出する構成では無いので、複雑な演算処理も必要無く、物標の捕捉が失われて速度が検出できなくなることも無い。従って、多数の物標の移動速度を確実に検出することができるので、危険な物標をデータ発生部6において確実に検出することができる。更に、ドップラー周波数から求めることができる物標の移動速度は、電波の放射方向における相対速度である。従って、上記実施形態の構成によって検出した物標の移動速度に基づいて、自装置に対して物標がどの程度の速度で接近しているのかを簡単に判定することができる。また、物標の移動速度が遅い場合、観測できるほどのドップラー周波数が生じないため、1回の送受信で周波数変化を観測して物標の速度を検出することが困難となる。この点、上記のように2つのエコー間での位相変化を見ることにより、遅い物標であっても速度を検出することができる。
【0107】
また、本実施形態のレーダ装置は、以下のように構成されている。即ち、このレーダ装置において、データ発生部6は、少なくとも物標からのエコー信号を検出するように構成されている。そして、データ発生部6は、当該データ発生部6が検出した物標からのエコー信号と、速度推定部22が推定した前記相対速度と、に基づいて、当該物標の危険度を求めている。
【0108】
このように、物標からのエコーを検出することにより、例えば海面反射のように衝突の危険が無い物標と、物標のように衝突の危険がある物標とを適切に区別して表示できるため、信頼性に優れる。
【0109】
また、本実施形態のレーダ装置において、表示器8は、レーダ映像を表示する際に、物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能である。
【0110】
これにより、表示器8に表示された色によって、オペレータが物標の危険度を直感的に把握することができる。また、表示器8に表示された色の濃さによって、オペレータがエコーの強度を直感的に把握することができる。
【0111】
以上に本発明の好適な実施の形態を説明したが、上記の構成は、例えば以下のように変更することができる。
【0112】
上記実施形態で説明した物標の危険度を求める方法は一例であって、種々変更することができる。例えば、物標の危険度を4段階以上で検出しても良い。また、例えば物標の種類を4種類で検出する構成としたが、これに限定されない。また、移動速度としては3段階で判定する構成としたが、更に細かく判定しても良い。
【0113】
また、「相対速度に基づいて物標の危険度を求める」とは、物標の相対速度に関する情報に加え、更に他の情報を考慮して危険度を求めても良いことを意味している。例えば上記実施形態のように、物標の相対速度に加え、物標の種類に関する情報を考慮して当該物標の危険度を求める構成であっても、「相対速度に基づいて物標の危険度を求めている」と言える。また例えば、自装置から当該物標までの距離を考慮することもできる。この場合、自装置に近い位置の物標ほど危険度を高く判定すれば良い。また例えば、物標の相対速度の情報に加えて、従来のARPAやAIS等から得られる情報を考慮して当該物標の危険度を求めるように構成することもできる。
【0114】
上記実施形態では、固定物標(Tn=3)と移動物標(Tn=2)は、同じ条件で危険度を判定しているが、固定物標と移動物標とで危険度の判定条件を異ならせても良いのは勿論である。この場合、移動物標の方が危険度が高くなるように判定することが考えられる。
【0115】
上記実施形態では、エコー強度に応じて表示色の濃さを決定する構成としたが、これに限らない。例えば、過去数スキャン分のエコー強度を平均した値に基づいて、色の濃さを決定しても良い。
【0116】
上記実施形態では、1スイープ前の信号との位相差を用いてドップラー周波数を算出するように説明したが、これに限らない。例えば、過去複数回のスイープの信号を用いて、それらの位相差の平均からドップラー周波数を求めることも可能である。このように構成することにより、ノイズの影響を受けにくくなり、より正確に物標の移動速度を求めることができる。なお、この構成を実現するには、スイープメモリ4に複数スイープ分のデータを記憶することが可能であるように構成すれば良い。
【0117】
上記実施形態ではレーダアンテナはパルス状電波を放射するものとしたが、FMCW(周波数変調連続波)の信号を用いても良い。
【符号の説明】
【0118】
1 レーダアンテナ
6 データ発生部(種類推定部、危険度検出部)
7 画像メモリ
8 表示器
22 速度推定部
【技術分野】
【0001】
本発明は、レーダ装置に関する。詳細には、レーダ装置において、衝突する危険度の高い物標を判定して分かり易く表示するための構成に関する。
【背景技術】
【0002】
一般的なレーダ装置において、レーダ映像を表示する際には、受信したエコーの強度に応じた表示色で物標を表示する。このようなレーダ装置においては、画面に表示されている物標が航海の障害となるか否か(衝突の危険があるか否か)は、オペレータがレーダ映像を数スキャンの間見て、経験によって判断していた。
【0003】
しかし、オペレータがレーダ映像に不慣れである場合には、表示されている物標が航海の障害となるか否かを判断することが難しかった。また、オペレータがレーダ映像に精通している場合であっても、少なくとも数スキャンの間画面を見続けない限り、衝突危険度を判断することができない。
【0004】
この点、特許文献1は、衝突危険度の高い他船は視認性を高く表示し、衝突危険度の低い他船は視認性を低く表示するように構成した他船表示装置を開示する。特許文献1は、これにより、視認性が高く、衝突回避という目的に適った表示を行うことができるとする。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−48595号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1は、他船の情報を検知する手段として、AIS(船舶自動識別装置)及びARPA(自動衝突予防支援装置)を用いている。
【0007】
ARPAは、過去のレーダ映像の推移から物標の移動ベクトル(速度及び移動方向)を検出する技術である。しかし、このARPAは信号処理負荷が大きいため、捕捉、追尾できる物標の点数に制限があるという課題があった。また、過去の数スキャン分のレーダ映像から物標の移動情報を検出するため、物標が移動方向や速度を変更したことを検出するまでに時間が掛かるという問題があった。更に、物標の近傍に海面反射等の不規則なエコーが現れた場合、物標の捕捉が海面反射等に乗り移ってロストしてしまうという問題もあった。
【0008】
一方、AISは、自船の位置情報や航行情報等を無線通信によって定期的に送信するとともに、他船から前記情報を受信して必要な情報を抽出する技術である。しかし、他船がAISを搭載していない場合は当該他船の情報を検知することができない。また、通信頻度が決められているため、他船の情報を即座に取得することができない。
【0009】
以上のようであるから、特許文献1の構成では、衝突危険度の高い物標を確実に把握し、リアルタイムで表示することが困難であった。
【0010】
本願発明は以上の事情に鑑みてされたものであり、その主要な目的は、衝突危険度の高い物標を確実かつリアルタイムに把握することができるレーダ装置を提供することにある。
【課題を解決するための手段及び効果】
【0011】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0012】
本発明の観点によれば、以下の構成のレーダ装置が提供される。即ち、このレーダ装置は、レーダアンテナと、表示器と、速度推定部と、危険度検出部と、を備える。前記レーダアンテナは、水平面内で回転しながら信号の送受信を繰り返すように構成される。前記表示器は、自装置周囲の物標の位置を示すレーダ映像を表示する。前記速度推定部は、自装置からの電波の放射方向成分における自装置と前記物標との相対速度を推定する。前記危険度検出部は、前記速度推定部が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める。また、前記速度推定部は、前記レーダアンテナが今回受信したエコーと、当該レーダアンテナが直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出する。そして、前記表示器は、前記レーダ映像を表示する際に、前記危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【0013】
これにより、危険度によって物標の表示方法を異ならせることができるので、例えば経験の浅いオペレータであっても、危険な物標を即座に判断することができる。また、自装置からの電波の放射方向成分における自装置と前記物標との相対速度に基づいて、物標が自装置に対してどの程度の速度で接近しているかを判断することができるため、例えば高速で接近してくる物標のように特に危険な物標を適切に表示して、オペレータに注意を喚起することができる。
【0014】
更に、上記のようにエコーの位相変化を観測することにより、ドップラー周波数を求め、これに基づいて物標の速度を検出することができる。従って、数スキャンの間レーダ映像を観測する必要も、他船からの通信を待機する必要も無く、即座に物標の速度を検出することができる。また、レーダ映像内の物標を捕捉して速度を検出する構成では無いので、複雑な演算処理も必要無く、物標の捕捉が失われて速度が検出できなくなることも無い。従って、多数の物標の移動速度を確実に検出することができるので、危険な物標を危険度検出部において確実に検出することができる。更に、ドップラー周波数から求めることができる物標の移動速度は、電波の放射方向における相対速度である。従って、本発明の構成によって検出した物標の移動速度に基づいて、自装置に対して物標がどの程度の速度で接近しているのかを簡単に判定することができる。また、物標の移動速度が遅い場合、観測できるほどのドップラー周波数が生じないため、1回の送受信で周波数変化を観測して物標の速度を検出することが困難となる。この点、上記のように2つのエコー間での位相変化を見ることにより、遅い物標であっても速度を検出することができる。
【0015】
上記のレーダ装置においては、以下のように構成されることが好ましい。即ち、このレーダ装置は、少なくとも物標からのエコー信号を検出する種類推定部を備える。そして、前記危険度検出部は、前記種類推定部が検出した物標からのエコー信号と、前記速度推定部が推定した前記相対速度と、に基づいて、当該物標の危険度を求める。
【0016】
このように、物標からのエコーを検出することにより、例えば海面反射のように衝突の危険が無い物標と、物標のように衝突の危険がある物標とを適切に区別して表示できるため、信頼性に優れる。
【0017】
前記のレーダ装置においては、以下のように構成されることが好ましい。即ち、前記表示器は、前記レーダ映像を表示する際に、前記物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能である。
【0018】
これにより、表示器に表示された色によって、オペレータが物標の危険度を直感的に把握することができる。また、表示器に表示された色の濃さによって、オペレータがエコーの強度を直感的に把握することができる。
【図面の簡単な説明】
【0019】
【図1】本発明の一実施形態に係るレーダ装置の主要な構成を示すブロック図。
【図2】直交検波を説明する図。
【図3】(a)海面反射領域基準画素に基づいて拡大海面反射領域を決定する様子を説明する図。(b)合成拡大海面反射領域を説明する図。
【図4】(a)連続性判定基準領域を設定した様子を説明する図。(b)物標の種類によるエコーの空間的な連続性の違いを説明する図。
【図5】1つの物標に対する今回のスイープと直前のスイープにおける送受信の様子を例示する図。
【発明を実施するための形態】
【0020】
次に、図面を参照して本発明の実施形態について説明する。図1は、本実施形態に係る船舶用レーダ装置の主要構成を示すブロック図である。なお、本実施形態では船舶用のレーダ装置として説明するが、本発明のレーダ装置の用途が船舶用に限られるものではない。
【0021】
本実施形態のレーダ装置が備えるレーダアンテナ1は、鋭い指向性を持った信号(パルス状電波)を放射可能であるとともに、自装置周囲にある物標からのエコー(反射信号)を受信するように構成されている。また、レーダアンテナ1は、所定の回転周期で水平面内を回転しながら、前記信号の送受信を繰り返し行うように構成されている。
【0022】
表示器8は、CRT、LCD等であり、グラフィック表示可能なラスタスキャン式の表示装置として構成されている。
【0023】
ここで、放射信号を放射してからエコーが返ってくるまでに掛かる時間は、レーダアンテナ1から物標までの距離に比例する。従って、放射信号を放射してから受信信号を受信するまでの時間を動径r、当該電波の送受信を行ったときのアンテナ角度を偏角θとすることにより、物標の位置をレーダアンテナ1を中心とした極座標系で取得することができる。この極座標系で取得された物標の位置を平面上にプロットすることにより、レーダ映像を得ることができる。本実施形態のレーダ装置は、前記レーダ映像を前記表示器8に表示することにより、自装置周囲の物標の様子を確認できるように構成したものである。
【0024】
なお、レーダアンテナ1は、物標からの反射信号以外にも、海面反射等の不要エコーを受信する。また、レーダアンテナ1が他船のレーダ信号を受信してしまう場合(干渉信号)もある。また、当該レーダアンテナ1が受信した信号にはホワイトノイズが含まれる。従って、前記表示器8には、物標の他にも、海面反射、干渉信号、ホワイトノイズ等がプロットされて表示される場合がある。そこで、以下の説明では、上記の事情を考慮して、物標、海面反射、干渉エコー、ホワイトノイズ等を、「受信信号」と総称する場合がある。
【0025】
本実施形態のレーダ装置は、表示器8にレーダ映像を表示する際に、物標の危険度等を推定し、当該物標の表示色を前記危険度等に応じて異ならせることができるように構成されている。これにより、レーダ装置のオペレータは、危険な物標を直感的に把握することができる。なお、物標の危険度を推定して色分けを行うための構成については、後に詳細に説明する。
【0026】
次に、エコーを受信して当該エコーのデータを取得するための構成について説明する。前記レーダアンテナ1がエコーを受信すると、受信信号が受信部2に出力され、A/D変換部3によってデジタルデータに変換された後、スイープメモリ4に一時的に記憶されるように構成されている。以下、各構成について説明する。
【0027】
前記受信部2は、レーダアンテナ1からの受信信号を検波して増幅するように構成されている。本実施形態において、受信部2は、受信信号の振幅及び位相の情報を取得するために、直交検波(IQ位相検波)を行っている。受信部2において直交検波を行うことにより、I信号とQ信号からなる複素信号を得る。以下、直交検波について図2を参照して簡単に説明する。
【0028】
ここで、レーダアンテナ1が放射する放射信号(パルス状電波)の搬送波が、周波数f0のコサイン波であるとして説明する。この場合、放射信号を放射してからの時間をt、受信部2に入力される受信信号(エコー)の振幅をX(t)とすると、当該エコーの波形S(t)は、式(1)で表現することができる。ここで、φ(t)は、放射信号の搬送波に対する、受信エコーの搬送波の位相である(以下、単に位相という)。
【数1】
【0029】
図2に示すように、この受信信号S(t)は、受信部2に受信された後に2系統に分岐させられる。そして一方の受信信号S(t)に、放射信号の搬送波と同一周波数で同一位相の参照信号2cos(2πf0t)を積算して合成することにより、以下の式(2)で表現される信号を得る。また、受信信号S(t)を分岐させた他方に、放射信号の搬送波と同一周波数で位相を90°ズラした参照信号−2sin(2πf0t)を積算して合成することにより、以下の式(3)で表現される信号を得る。
【数2】
【0030】
式(2)及び式(3)の右辺第1項(2倍周波数成分)はローパスフィルタ(LPF)によって除去される。これにより、受信部2からは、式(4)に示すI信号、及び式(5)に示すQ信号が出力される。
【数3】
【0031】
アナログ信号である前記I信号及びQ信号は、A/D変換部3に入力される。A/D変換部3は、このI信号及びQ信号をサンプリングし、複数ビットのデジタルデータ(IQ受信データ)に変換してスイープメモリ4に出力する。なお、上記のようにアナログでI信号及びQ信号を生成する方式のほか、受信信号を直接サンプリングした後に、デジタルでI信号及びQ信号を生成する方式でも良い。
【0032】
スイープメモリ4は、前記IQ受信データを1スイープ分リアルタイムで記憶することができるバッファである。なお、「スイープ」とは、信号を送信してから次の信号を送信するまでの一連の動作をいい、「1スイープ分の受信データ」とは、信号を送信した後、次の信号を送信するまでの期間に受信したデータをいう。
【0033】
前記1スイープ分のデータは、スイープメモリ4の先頭アドレスから順次記憶されていくように構成されている。ここで、スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データのI信号データをIn、Q信号データをQnとする。当該n番目のデータをサンプリングした時のエコーの強度(振幅)をXn、位相をφnとすると、In及びQnは以下の式で表すことができる。
【数4】
【0034】
次に、表示器8に表示するレーダ映像の画像データを生成するための構成について説明する。表示器8はラスタスキャン式の表示装置として構成されており、この表示器8に表示させるための画像データは画像メモリ7に記憶されている。この画像メモリ7に記憶されている画像データは複数の画素からなるラスタデータであり、表示器8のラスタ走査に同期して高速で読み出されて表示色選択部15(後述)へ転送される。
【0035】
前記画像データにおいて、各画素は、例えば船首方向をY軸、船幅方向をX軸とするXY直交座標系で配列して記憶されている。各画素のデータは複数ビットからなり、当該各画素には、エコー強度Xnと、エコー危険度Dnと、を示すデータがそれぞれ記憶されている。表示器8のラスタ走査に同期してこの画像データを読み出す際に、例えば、エコー強度Xnが強い画素は濃い色で表示し、エコー強度Xnが弱い画素は薄い色で表示することにより、水平面上における自装置周囲のエコーの様子(レーダ映像)を表示器8に表示することができる。なお、エコー危険度Dnについては後述する。
【0036】
各画素のエコー強度Xnを算出するための構成について説明する。バッファであるスイープメモリ4は、IQ受信データが新たに書き込まれると、次のスイープによって当該IQ受信データが上書きされてしまう前に、振幅検出部16及びパルスドップラー処理部17(後述)に対してIQ受信データを順次出力する。
【0037】
振幅検出部16は、IQ受信データが入力されると、I信号とQ信号をベクトル合成することにより当該IQ受信データのエコー強度を検出する。ここで、前記式(6)及び式(7)より、スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データのエコー強度Xnは、以下の式(8)によって求めることができる。
【数5】
【0038】
振幅検出部16が求めたエコー強度Xnは、後述のデータ発生部6を介して画像メモリ7に出力され、対応するアドレスに記憶される。エコー強度Xnを画像メモリ7のどのアドレスに記憶するか(即ち、現在画像データのどの画素を処理しているのか)は、描画アドレス発生部5によって決定される。なお、このエコー強度Xnは、後述の挙動データ発生部11及び連続性検出部9にも出力されている。
【0039】
描画アドレス発生部5には、所定方向(例えば船首方向)を基準としたスイープ角度データ(レーダアンテナ1の角度θを示すデータ)がレーダアンテナ1から入力されている。描画アドレス発生部5は、レーダアンテナ1の角度θと、スイープメモリ4からのIQ受信データの読み出し位置nとから、当該IQ受信データに対応する画素を指定するアドレスを生成する。具体的には、描画アドレス発生部5は、以下の式(9)及び式(10)の演算を実現するハードウェアにより構成される。ここで、X,Yは、画像メモリ7に記憶されている画像データの画素を指定するアドレスである。また、Xs,Ysは、画像メモリに記憶されている画像データにおいて、スイープの中心位置(レーダアンテナ1の位置)に対応する画素を指定するアドレスである。
【数6】
【0040】
エコー強度Xnがデータ発生部6から画像メモリ7に出力される際には、当該画像メモリ7のアドレス指定部に、上記アドレスX,Yが入力される。これにより、極座標系で取得される物標エコーの位置がXY直交座標系に変換されて、当該物標エコーの位置に対応する座標X,Yの位置の画素に、エコー強度Xnのデータを記憶することができる。結果として、エコー強度を物標エコーの位置に応じて平面上にプロットした画像データが生成されるので、これに基づいてレーダ映像を表示器8に表示することができる。なお、描画アドレス発生部5が出力する画素のアドレスは、後述の挙動データメモリ20及び不安定状態保持メモリ21にも入力されている。
【0041】
次に、物標からのエコーと、それ以外のエコーとを判別するための構成について説明する。まず、エコーの時間的な連続性を観測することにより海面反射によるエコーを判別する構成を説明する。
【0042】
周知のように、船舶用レーダにおいては、自船周囲の海面からのエコーが受信される。この海面反射は物標からのエコーと区別することが好ましい。ここで、海面反射によるエコーは、スキャン毎に同じ位置に出現しないで規則性無く検出される。これを逆に考えれば、ある画素においてエコーが時間的な連続性が無く不規則に検出される場合は、当該エコーは海面反射であると判断することができる。本実施形態のレーダ装置は、このように検出エコーが不安定な画素に基づいて海面反射領域を検出するための、海面反射領域検出部10を備えている。この海面反射領域検出部10は、挙動データ発生部11と、不安定画素検出部12と、不安定状態保持用データ発生部13と、海面反射領域決定部14と、を含んでいる。
【0043】
まず、挙動データ発生部11について説明する。前記振幅検出部16によってエコー強度Xnが算出され、前記描画アドレス発生部5によって前記エコー強度Xnを記憶する画素のアドレスが決定されると、挙動データ発生部11は、当該画素における過去数スキャンにわたるエコーの有無を表現する挙動データPnを求め、挙動データメモリ20に出力するように構成されている。
【0044】
挙動データメモリ20は、画像メモリ7のアドレスと対応するように直交座標系アドレスが設定されており、画像メモリ7の各画素と1対1に対応して挙動データPnを記憶する記憶媒体である。
【0045】
この挙動データPnは、複数ビットからなり、エコーの有無を示すエコー検出フラグを、過去数スキャンにわたって記憶したデータである。例えば挙動データメモリ20を各画素8bitで構成した場合、過去8スキャン分のエコー検出フラグを挙動データPnによって表現することができる。具体的には、例えばある画素の挙動データPnが「00000011」であった場合、直近の2スキャンでは当該画素の位置でエコーが検出されたが、それ以前の6スキャンではエコーが検出されなかったことを示す。なお、「スキャン」とは、電波の送受信を行いながらアンテナが1回転することにより、自装置の周囲を360°にわたってスイープすることをいう。
【0046】
前記挙動データPnを生成するために、挙動データ発生部11は以下の処理を行う。まず、挙動データ発生部11は、振幅検出部16から入力されてくるエコー強度Xnが、予め設定した検出閾値以上であるかどうかを判定する。検出閾値は、例えば検出したホワイトノイズレベルに所定のオフセットを加算したものが用いられる。挙動データ発生部11は、今回のエコー強度Xnが検出閾値以上であれば、「1」からなるエコー検出フラグを生成し、今回のエコー強度Xnが検出閾値未満であれば、「0」からなるエコー検出フラグを生成する。
【0047】
続いて、挙動データ発生部11は、挙動データメモリ20から前回の挙動データPn-1を読み出す。このとき、挙動データメモリには現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、現在処理している画素の挙動データPn-1が読み出される。次に、挙動データ発生部11は、前回の挙動データPn-1を1段階左シフトし、最下位ビットに今回のエコー検出フラグを出力して、今回の挙動データPnを生成する。最後に、今回の挙動データPnを挙動データメモリに出力する。このとき、挙動データメモリには、今回処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該画素の前回の挙動データPn-1が今回の挙動データPnによって上書きされる。以上により、今回を含む過去8スキャン分の挙動データが記憶される。また、挙動データ発生部11から出力された今回の挙動データPnは、不安定画素検出部12及びデータ発生部6へ出力される。
【0048】
不安定画素検出部12は、挙動データ発生部11から挙動データPnが入力されると、当該挙動データPnの隣り合うビット間での状態変化の数を不安定度として算出する。即ち、隣り合うビット(例えば第0ビットと第1ビットや、第6ビットと第7ビット)間で、「1」から「0」へ変化したり、「0」から「1」へ変化する回数を検出する。例えば、挙動データPnが「11111111」や「00000000」だった場合は不安定度を「0」とし、「10101010」だった場合は不安定度を「7」とする。
【0049】
不安定画素検出部12は、不安定度を算出すると、予め設定した不安定状態検出閾値と比較して、不安定状態検出データRnを生成する。例えば不安定度「4」を不安定状態検出閾値とした場合、不安定度「7」のときはRn=1とし、不安定度「1」のときはRn=0とする。不安定画素検出部12は、不安定状態検出データRnを不安定状態保持用データ発生部13へ出力する。
【0050】
不安定状態保持用データ発生部13は、現在処理している画素の不安定度を示す不安定状態保持用データHnを生成し、不安定状態保持メモリ21に出力する。
【0051】
不安定状態保持メモリ21は、画像メモリ7のアドレスと対応するように直交座標系アドレスが設定されており、画像メモリ7の各画素と1対1に対応して不安定状態保持用データHnを記憶する記憶媒体である。
【0052】
不安定状態保持用データ発生部13は、不安定画素検出部12から不安定状態検出データRnが入力されると、不安定状態保持メモリ21から前回の不安定状態保持用データHn-1を読み出す。このとき、不安定状態保持メモリ21には現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、現在処理している画素の不安定状態保持用データHn-1が読み出される。
【0053】
ここで、以下では、不安定状態保持メモリ21が各画素4ビットで構成されている場合(0〜15の範囲の整数を記憶できる場合)の例で説明する。不安定状態保持用データ発生部13は、Rn=1であった場合、現在処理している画素が不安定状態であると判断して、「15」からなる不安定状態保持用データHnを生成する。一方、Rn=0であった場合、当該画素は安定状態であると判断して、前回の不安定状態保持用データHn-1から1を引いた値を今回の不安定状態保持用データHnとする。また、当該画素が安定状態(Rn=0)で、かつ前回の不安定状態保持用データHn-1が0だった場合は、そのままHn=0とする。
【0054】
最後に、不安定状態保持用データ発生部13は、今回の不安定状態保持用データHnを不安定状態保持メモリ21に出力する。このとき、不安定状態保持メモリ21には、今回処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該画素の前回の不安定状態保持用データHn-1が今回の不安定状態保持用データHnによって上書きされる。
【0055】
これにより、各画素が、少なくとも今回を含めて過去16スキャンにわたって安定状態であったか否かを記憶することができる。即ち、Hn=0であれば、当該画素が、少なくとも今回を含めた過去16スキャンの間はRn=0(安定状態)だったと判断できる。一方、Hn≠0であれば、今回を含めた過去16スキャンの間にRn=1(不安定状態)だったことがあると判断できる。
【0056】
このようにして不安定状態保持用データHnを求めるのは、以下のような理由による。即ち、海面反射は、海況、風向き、アンテナ高さ、STC(海面反射除去処理)等の調整により変化し、更に、自船からの距離が離れるに従って弱くなる。このため、海面反射の境界は明確に区切ることができず、不安定状態から一時的に安定状態になったとしても、海面反射である確率は高い。この点、上記のようにして求めた不安定状態保持用データHnに基づいて海面反射か否かを判断することにより、一時的に安定状態となった画素を海面反射ではないと判定してしまうことを防止することができる。
【0057】
前記不安定状態保持用データHnは、海面反射領域決定部14に出力される。海面反射領域決定部14は、入力された不安定状態保持用データがHn≠0であれば、当該不安定状態保持用データHnに対応する画素は海面反射の種(たね)であると判定し、当該画素を海面反射領域基準画素として検出する。一方、海面反射領域決定部14は、Hn=0の場合(現在処理している画素が海面反射の種ではない場合)であっても、当該画素の近傍に位置する画素が海面反射の種である場合には、現在処理している画素は海面反射領域内であると判定する。
【0058】
以下、図3を参照して具体的に説明する。海面反射領域決定部14は、図3(a)に示すように海面反射領域基準画素401を検出すると、距離r方向及びスイープ回転方向(レーダアンテナ1の回転方向)θへ海面反射領域を拡大させるようにして、直交座標系の所定数の画素を選択して拡大海面反射領域410を決定する。この際、海面反射領域決定部14は、拡大海面反射領域410において、海面反射領域基準画素401が、スイープの中心位置(レーダアンテナ1の位置)に距離r方向で最も近く、スイープ回転方向θに対して最も起点側となるようにして、前記拡大海面反射領域410を設定する。
【0059】
このような拡大海面反射領域の設定は、海面反射領域決定部14が不安定状態保持用データHn≠0を受け付けて、海面反射領域基準画素が検出される毎に行われる。例えば図3(b)においては、複数の海面反射領域基準画素401,402,403,404が検出されている。このような場合、海面反射領域決定部14は、海面反射領域基準画素401に基づく拡大海面反射領域410、海面反射領域基準画素402に基づく拡大海面反射領域420、海面反射領域基準画素403に基づく拡大海面反射領域430、海面反射領域基準画素404に基づく拡大海面反射領域440を組み合わせ、合成拡大海面反射領域400を設定する。
【0060】
海面反射領域決定部14は、現在処理している画素が、合成拡大海面反射領域400に該当する画素であるかどうかを示す海面反射領域データBnを生成し、データ発生部6へ出力する。具体的には、海面反射領域決定部14は、現在処理している画素が合成拡大海面反射領域400内の画素であれば、海面反射領域データBn=1を生成し、合成拡大海面反射領域400外の画素であれば、海面反射領域データBn=0を生成して、データ発生部6へ出力する。
【0061】
上記のように構成したのは、海面反射の種の近傍は、やはり海面反射である可能性が高いためである。この点、上記のような処理とすることで、実際に海面反射の種と判定された画素のみでなく、当該画素近傍の他の画素(海面反射である可能性の高い画素)にも拡大して海面反射領域を設定することができるので、海面反射である可能性の高い画素を確実に検出することができる。
【0062】
次に、エコーの空間的な連続性を観測することにより、物標からのエコーと、ホワイトノイズ及び干渉信号と、を判別する構成について説明する。
【0063】
即ち、ホワイトノイズや干渉信号は空間的に不連続で検出される一方、物標からのエコーはある程度空間的に連続して検出される。従って、エコーの空間的な連続性を判断することによって、当該エコーが、物標からのエコーか、ノイズ等か、を判定することができる。以下、具体的に説明する。
【0064】
連続性検出部9には、振幅検出部16からエコー強度Xnが入力されている。また、連続性検出部9は、複数のエコー強度のデータ(エコー強度データ)を所定方位分記憶するバッファメモリを備えており、このバッファメモリに前記エコー強度データが順次記憶される。
【0065】
連続性検出部9は、振幅検出部16からエコー強度Xnが新しく入力されると、連続性の判定対象となる画素のエコー強度データの周囲に、連続性判定基準領域を設定する。例えば図4(a)においては、当該判定対象となるエコー強度データ100の近傍8個のデータを含む領域を連続性判定基準領域110としている。
【0066】
連続性検出部9は、連続性判定基準領域内に検出閾値以上のレベルを有するエコー強度データが何個あるかを検出し、その数を、前記判定対象となる画素の連続性データAnとする。例えば図4(a)の例では、連続性判定基準領域110内には閾値以上のエコー強度データが5つ存在するので、エコー強度データ100の位置にある画素の連続性データは、An=5とする。
【0067】
ここで、受信信号の種類によって連続性データAnが異なることを説明する。例えば、図4(b)に示すように、物標901は、検出閾値以上のレベルを有するエコー強度データが集まっているので、連続性データAnが大きくなる。一方、干渉信号902は、同一方向にのみ所定閾値以上のレベルを有するエコー強度データが存在するため、連続性データAnも小さくなる。また、ホワイトノイズ903も、単発で発生することが多いので、連続性データAnは小さくなる。従って、以上のように連続性データAnを求めることにより、物標からのエコーと、干渉信号及びホワイトノイズと、を判別することができる。
【0068】
次に、物標の移動速度を算出するための構成について説明する。
【0069】
前述のとおり、他船の移動速度を検出するためにAISやARPAを用いていた従来のレーダ装置においては、複数の物標の速度を確実かつリアルタイムで求めることができないという課題があった。
【0070】
そこで、本実施形態のレーダ装置は、エコーのドップラー周波数を推定し、前記ドップラー周波数に基づいて物標の移動速度を求めるように構成されている。この構成によれば、他船からのAIS情報の受信を待機したり、過去のレーダ映像の推移を複数スキャンにわたって観測したりしなくても、物標の移動速度を求めることができる。従って、多数の物標の移動速度を、確実かつ即座に求めることができる。
【0071】
また、AISやARPAによって求めることができるのは、水平面内における物標の絶対速度又は相対速度である。この点、ドップラー周波数に基づけば、自船に対する物標の相対速度のうち、電波の放射方向成分のみを検出することができる。従って、ドップラー周波数から求めた物標速度の値は、自船に対して物標がどれだけの速さで近づいてきているかの指標として用いることができるため、本実施形態のレーダ装置において特に有効である(詳しくは後述)。
【0072】
ただし、船舶の速度は比較的遅いため、発生するドップラー周波数も小さく、1回の送受信でドップラー周波数を検出するのは困難である。そこで、本実施形態ではパルスドップラー(パルスペア)法によってドップラー周波数を求めている。
【0073】
パルスドップラー法とは、適宜の間隔を空けてパルス状電波を放射し、同一物標からの受信パルスを2回取得して、2つの受信パルス間の位相変化を検出することにより物標のドップラー周波数を求めるものである。本実施形態ではレーダアンテナ1を回転させながらパルス状電波を放射しているため、2回の送信パルス間でパルスの送信方向は若干変化するが、例えば図5に示すように、直前のスイープと今回のスイープとの間で考えれば同じ物標800からのエコーを取得しているとみなすことができる。そこで本実施形態では、パルスヒット間(今回のスイープで受信したエコーと、直前のスイープで受信したエコーとの間)の位相変化に基づいて、物標からのエコーのドップラー周波数を検出するように構成している。
【0074】
以下、具体的に説明する。本実施形態のレーダ装置は、速度推定部22を備えている。この速度推定部22は、パルスドップラー処理部17と、物標速度算出部18と、から構成されている。
【0075】
前記パルスドップラー処理部17は、スイープメモリ4からIQ受信データが入力されると、当該IQ受信データに基づいて、エコーの搬送波の位相を求める。スイープメモリ4の先頭アドレスからn番目に記憶されているIQ受信データの位相φnは、前記の式(6)及び式(7)より、以下の式(11)で求めることができる。
【数7】
【0076】
また、パルスドップラー処理部17は、直前のスイープにおける位相を記憶しておくために、1スイープ分の位相のデータを記憶可能な位相バッファメモリを備えている。この位相バッファメモリは、スイープメモリと1対1でアドレスが対応するように構成されている。
【0077】
パルスドップラー処理部17は、今回の位相φnを求めると、位相バッファメモリの先頭アドレスからn番目の位置から、直前のスイープで受信したエコーの位相φn’を読み出す。今回のスイープにおけるエコーの搬送波と、直前のスイープにおけるエコーの搬送波と、の間の位相変化Δφは、以下の式(12)で求めることができる。ここで、前述のように、今回のスイープと直前のスイープとでは同じ物標からのエコーを受信していると考えられるので、位相変化Δφは、前回のエコーを受信してから今回のエコーを受信するまでの間に、当該物標の移動によって発生した位相変化である。
【数8】
【0078】
物標の移動による位相変化は、以下の式(13)で表される。ここで、fdはドップラー周波数であり、ΔTはパルス状電波(放射信号)の送信間隔であり、PRFは前記パルス状電波のパルス繰返し周波数(Pulse Repetition Frequency、単位:Hz)である。従って、パルスドップラー処理部17は、式(14)の演算を行うことにより、ドップラー周波数fdを算出することができる。パルスドップラー処理部17は、ドップラー周波数fdを算出すると、当該ドップラー周波数fdを物標速度算出部18へ出力する。
【数9】
【0079】
物標速度算出部18は、ドップラー周波数fdが入力されると、物標の移動速度を求める。まず、物標速度算出部18は、ドップラー周波数fdに基づいて、自装置と物標との相対速度Vrを求める。物標速度算出部18は、ドップラー周波数fdと相対速度Vrとの間の関係式(15)によって、相対速度Vrを算出する。ここで、λは信号の搬送波の波長である。なお、式(15)で求めることができる相対速度Vrは、自装置(レーダアンテナ1)からの電波の放射方向成分における自装置と物標との相対速度(物標と自装置との間の直線距離方向の相対速度)である。
【数10】
【0080】
以上のように、ドップラー周波数から算出できる相対速度Vrは、自船に対する物標の相対速度のうち、電波の放射方向の成分のみである。従って、この相対速度Vrの値は、物標が自船に対してどれだけの速さで近づいてきているかの指標として用いることができる。本実施形態では物標の危険度を判定するために物標の移動速度を求めているので(詳細は後述)、物標が自船に対してどの程度の速度で接近しているかが把握できれば良い。即ち、本実施形態においては、水平面内における物標の相対速度や絶対速度の情報を取得する必要は無く、電波の放射方向(物標と自船との間の直線距離方向)の相対速度(即ち上記相対速度Vr)が分かれば十分である。
【0081】
このように、パルスドップラー法によって物標の移動速度を求める方法は、物標の危険度を求めるために必要な情報(電波の放射方向成分における当該物標の相対速度)を即座に(リアルタイムに)得ることができるという点で、物標の危険度判定に特に有効な手段であると言える。
【0082】
次に、物標速度算出部18は、ドップラー周波数fdに基づいて求めた相対速度Vrから、物標の移動速度を2ビットで表現する物標速度データVnを算出する。物標が自船から遠ざかっている時の相対速度Vrの値を負の値、近づいている時の相対速度Vrの値を正の値とすると、物標速度データVnは以下のように表現することができる。
【0083】
例えば、物標速度算出部18は、物標の相対速度Vrが−1kt未満の場合(物標が遠ざかっている場合)は、物標速度データをVn=0とする。また、物標の相対速度Vrが−1kt以上、1kt以下の場合は、物標速度データをVn=1とする。また、物標の相対速度Vrが1ktより大きい場合(物標が接近している場合)は、物標速度データをVn=2とする。以上のようにして求めた物標速度データVnは、データ発生部6に出力される。
【0084】
次に、物標の危険度を判定するための構成について説明する。物標の危険度は、データ発生部6によって判定される。従って、データ発生部6は、危険度検出部であるということができる。
【0085】
データ発生部6には、現在処理している画素についての、エコー強度Xn、連続性データAn、挙動データPn、海面反射領域データBn及び物標速度データVnが入力されている。
【0086】
データ発生部6は、まず、エコー強度Xn、連続性データAn、挙動データPn及び海面反射領域データBnに基づいて、現在処理している画素の位置に存在する受信信号の種類を判定する。従って、データ発生部6は、種類推定部であるということもできる。データ発生部6は、当該画素の受信信号の種類を、固定物標、移動物標、海面反射、その他(干渉やノイズなどの不要エコー)の4種類で判定する。以下、具体的に説明する。
【0087】
現在処理している画素のエコー強度Xnが所定閾値よりも小さい場合は、当該画素の位置には物標は存在しないと判断することができる。また例えば、エコー強度Xnの値が大きい場合であっても、連続性データAnの値が小さければ、その画素の受信信号はレーダ干渉やホワイトノイズであると判断できる。一方、海面反射領域データBnが「1」の場合は、その画素の受信信号は海面反射であると判断すれば良い。
【0088】
また、挙動データPnの各ビットに1が多ければ、そのデータは検出頻度が高いデータであり、即ち固定物標(陸地など)であると判断することができる。更に、現在処理している画素が海面反射でもレーダ干渉やホワイトノイズでも無く、挙動データPnの値が00000001や00000011であれば(即ち、最新の数スキャンでエコーが検出されている場合は)、そのデータは移動している物標(船舶など)であると判断することができる。
【0089】
データ発生部6は、現在処理している画素の受信信号の種類を判定すると、当該受信信号の種類を2ビットで表現するエコー種類判定結果Tnを生成する。以下、エコー種類判定結果Tnの判定の具体例を示す。例えば、Pnにおいて「1」のビットの数が6以上ある場合は、固定物標と判断して、Tn=3とする。また、Pnの値が「00000001」又は「00000011」であり、且つBn=0、且つAn>3の場合は、移動物標と判断して、Tn=2とする。また、Bn=1の場合は、海面反射であると判断して、Tn=1とする。一方、上記の場合にあてはまらない場合は、その他の信号(干渉信号やホワイトノイズ)であると判断して、Tn=0とする。
【0090】
続いて、データ発生部6は、エコー種類判定結果Tnと、物標速度データVnと、から、現在処理している画素の位置に存在する物標の危険度を2ビットで表現するエコー危険度Dnを生成する。例えば、物標速度データVn=2の場合(物標が接近していると判定された場合)であっても、受信信号の種類が海面反射であれば、その画素の物標に対する衝突の危険性は低いと判断できる。また、Vn=2であり、受信信号の種類が移動物標を示すのであれば、その画素の物標は危険度が高いと判断できる。
【0091】
以下、エコー危険度Dnの判定の具体例を示す。例えば、Tn=2又はTn=3であり、且つVn=2の場合は、当該物標に対する衝突の危険度が高いと判断して、Dn=2とする。また、Tn=2又はTn=3であり且つVn=1の場合、又は、Tn=0であり且つVn=2の場合は、当該物標に対する衝突の危険度は中程度であると判断して、Dn=1とする。また、Tn=0であり且つVn=1の場合、又はVn=0の場合、又はTn=1の場合は、当該物標に対する衝突の危険度は低いと判断して、Dn=0とする。
【0092】
データ発生部6は、上記のようにして現在処理している画素のエコー危険度Dnを求めると、当該エコー危険度Dn及びエコー強度Xnを画像メモリ7に出力する。このとき、前述のように、画像メモリ7には現在処理している画素のアドレスが描画アドレス発生部5から入力されているので、当該現在処理している画素の位置に、エコー危険度判定結果Dn及びエコー強度Xnが記憶される。
【0093】
次に、エコー危険度及びエコー強度に応じて、表示器8の表示を色分けして表示するための構成について説明する。
【0094】
最初に、従来の構成について簡単に説明する。従来のレーダ装置においては、エコー強度が強い画素は赤、中間レベルの画素は黄、弱い画素は薄い緑、というように、エコー強度に応じて表示色を変えて表示する構成が知られている。しかし、この方法では、強いエコーを直感的に把握することはできるものの、当該エコーとの衝突の危険度が高いか低いかは、レーダ映像を見るだけでは即座に判定することができなかった。
【0095】
一方、特許文献1が開示する他船表示装置は、衝突危険度に応じて物標の位置を示すマークの表示方法を変える構成となっている。しかし、特許文献1の構成は、前記マークを表示する位置(即ち、物標の位置)を取得する必要があるため、探知画像から物標の位置を捕捉し、追尾する処理を行っている。従って、物標の数が多い場合、特許文献1の構成では、物標の位置を取得するための処理負荷が過大となって、全ての物標を捕捉できない場合があった。
【0096】
この点、本実施形態のレーダ装置は、以下のように構成されている。
【0097】
前述のように、画像メモリ7に記憶された画像データの各画素には、エコー危険度Dnとエコー強度Xnとが記憶されている。表示色選択部15は、表示器8のラスタ走査に同期して画像メモリ7から各画素データを読み出し、当該画素のエコー危険度Dnとエコー強度Xnに応じて表示色を決定し、前記表示器8に転送するように構成されている。
【0098】
具体的には、表示色選択部15は、各画素のデータ(エコー危険度Dn及びエコー強度Xn)と、当該画素を表示器8に表示する際の色を指定するRGB値と、を対応させるためのカラーパレットを有している。
【0099】
本実施形態において、表示色選択部15は、各画素のエコー危険度Dnに応じて色を異ならせるとともに、エコー強度Xnに応じて色の濃さを異ならせた表示色を選択するように構成されている。例えば、本実施形態ではエコー危険度Dnを3段階で判定しているので、画素の表示色を、エコー危険度Dnに応じて赤、黄、青の3段階で表示するとする。この場合、表示色選択部15は、赤、黄、青の3色について、濃淡を表現できるRGB値を格納したカラーパレットをそれぞれ用意しておく。
【0100】
そして、表示色選択部15は、表示器8のラスタ走査に同期して画像メモリ7から画素データ(当該画素のエコー強度Xn及びエコー危険度Dn)を読み出すと、前記カラーパレットを参照して当該画素の表示色を決定する。例えば表示色選択部15は、Dn=0のときは青のカラーパレット、Dn=1のときは黄のカラーパレット、Dn=2のときは赤のカラーパレットをそれぞれ参照する。これにより、エコー危険度に応じて、赤、黄、青の3段階でエコーを表示することができる。
【0101】
表示色選択部15は、エコー危険度Dnによって3色のカラーパレットの中から1つを選択すると、エコー強度Xnを引数として当該カラーパレットからRGB値を取得する。このとき、表示色選択部15は、Xnが大きい場合は濃い色のRGB値を、Xnが小さい場合は薄い色のRGB値を選択する。これにより、エコー強度Xnが大きい画素ほど目立つように表示することができる。
【0102】
表示色選択部15は、上記のようにして画素のRGB値を決定すると、表示器8に転送する。
【0103】
以上の処理により、簡単な処理で、エコー危険度Dn及びエコー強度Xnに応じた表示色で、エコーの様子を表示器8に表示することができる。また、例えば、エコー強度が強くてエコー危険度が高い画素(この場合は濃い赤色で表示される)ほど目立つように表示されるので、このような危険なエコーをオペレータが即座に判断することができる。
【0104】
以上で説明したように、本実施形態のレーダ装置は、レーダアンテナ1と、表示器8と、速度推定部22と、データ発生部6と、を備える。レーダアンテナ1は、水平面内で回転しながらパルス状の信号の送受信を繰り返す。表示器8は、自装置周囲の物標の位置を示すレーダ映像を表示する。速度推定部22は、自装置からの電波の放射方向成分における自装置と物標との相対速度を推定する。データ発生部6は、速度推定部22が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める。また、速度推定部22は、レーダアンテナ1が今回受信したエコーと、当該レーダアンテナ1が直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出する。そして、表示器8は、前記レーダ映像を表示する際に、危険度が高い物標と低い物標とで表示方法を異ならせることが可能である。
【0105】
これにより、危険度によって受信信号の表示方法を異ならせることができるので、例えば経験の浅いオペレータであっても、危険な物標を即座に判断することができる。また、自装置からの電波の放射方向成分における自装置と前記物標との相対速度に基づいて、物標が自装置に対してどの程度の速度で接近しているかを判断することができるため、例えば高速で接近してくる物標のように特に危険な物標を適切に表示して、オペレータに注意を喚起することができる。
【0106】
更に、上記のようにエコーの位相変化を観測することにより、ドップラー周波数を求め、これに基づいて物標の速度を検出することができる。従って、数スキャンの間レーダ映像を観測する必要も、他船からの通信を待機する必要も無く、即座に物標の速度を検出することができる。また、レーダ映像内の物標を捕捉して速度を検出する構成では無いので、複雑な演算処理も必要無く、物標の捕捉が失われて速度が検出できなくなることも無い。従って、多数の物標の移動速度を確実に検出することができるので、危険な物標をデータ発生部6において確実に検出することができる。更に、ドップラー周波数から求めることができる物標の移動速度は、電波の放射方向における相対速度である。従って、上記実施形態の構成によって検出した物標の移動速度に基づいて、自装置に対して物標がどの程度の速度で接近しているのかを簡単に判定することができる。また、物標の移動速度が遅い場合、観測できるほどのドップラー周波数が生じないため、1回の送受信で周波数変化を観測して物標の速度を検出することが困難となる。この点、上記のように2つのエコー間での位相変化を見ることにより、遅い物標であっても速度を検出することができる。
【0107】
また、本実施形態のレーダ装置は、以下のように構成されている。即ち、このレーダ装置において、データ発生部6は、少なくとも物標からのエコー信号を検出するように構成されている。そして、データ発生部6は、当該データ発生部6が検出した物標からのエコー信号と、速度推定部22が推定した前記相対速度と、に基づいて、当該物標の危険度を求めている。
【0108】
このように、物標からのエコーを検出することにより、例えば海面反射のように衝突の危険が無い物標と、物標のように衝突の危険がある物標とを適切に区別して表示できるため、信頼性に優れる。
【0109】
また、本実施形態のレーダ装置において、表示器8は、レーダ映像を表示する際に、物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能である。
【0110】
これにより、表示器8に表示された色によって、オペレータが物標の危険度を直感的に把握することができる。また、表示器8に表示された色の濃さによって、オペレータがエコーの強度を直感的に把握することができる。
【0111】
以上に本発明の好適な実施の形態を説明したが、上記の構成は、例えば以下のように変更することができる。
【0112】
上記実施形態で説明した物標の危険度を求める方法は一例であって、種々変更することができる。例えば、物標の危険度を4段階以上で検出しても良い。また、例えば物標の種類を4種類で検出する構成としたが、これに限定されない。また、移動速度としては3段階で判定する構成としたが、更に細かく判定しても良い。
【0113】
また、「相対速度に基づいて物標の危険度を求める」とは、物標の相対速度に関する情報に加え、更に他の情報を考慮して危険度を求めても良いことを意味している。例えば上記実施形態のように、物標の相対速度に加え、物標の種類に関する情報を考慮して当該物標の危険度を求める構成であっても、「相対速度に基づいて物標の危険度を求めている」と言える。また例えば、自装置から当該物標までの距離を考慮することもできる。この場合、自装置に近い位置の物標ほど危険度を高く判定すれば良い。また例えば、物標の相対速度の情報に加えて、従来のARPAやAIS等から得られる情報を考慮して当該物標の危険度を求めるように構成することもできる。
【0114】
上記実施形態では、固定物標(Tn=3)と移動物標(Tn=2)は、同じ条件で危険度を判定しているが、固定物標と移動物標とで危険度の判定条件を異ならせても良いのは勿論である。この場合、移動物標の方が危険度が高くなるように判定することが考えられる。
【0115】
上記実施形態では、エコー強度に応じて表示色の濃さを決定する構成としたが、これに限らない。例えば、過去数スキャン分のエコー強度を平均した値に基づいて、色の濃さを決定しても良い。
【0116】
上記実施形態では、1スイープ前の信号との位相差を用いてドップラー周波数を算出するように説明したが、これに限らない。例えば、過去複数回のスイープの信号を用いて、それらの位相差の平均からドップラー周波数を求めることも可能である。このように構成することにより、ノイズの影響を受けにくくなり、より正確に物標の移動速度を求めることができる。なお、この構成を実現するには、スイープメモリ4に複数スイープ分のデータを記憶することが可能であるように構成すれば良い。
【0117】
上記実施形態ではレーダアンテナはパルス状電波を放射するものとしたが、FMCW(周波数変調連続波)の信号を用いても良い。
【符号の説明】
【0118】
1 レーダアンテナ
6 データ発生部(種類推定部、危険度検出部)
7 画像メモリ
8 表示器
22 速度推定部
【特許請求の範囲】
【請求項1】
水平面内で回転しながら信号の送受信を繰り返すように構成されたレーダアンテナと、
自装置周囲の物標の位置を示すレーダ映像を表示する表示器と、
自装置からの電波の放射方向成分における自装置と前記物標との相対速度を推定する速度推定部と、
前記速度推定部が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める危険度検出部と、
を備え、
前記速度推定部は、前記レーダアンテナが今回受信したエコーと、当該レーダアンテナが直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出するとともに、
前記表示器は、前記レーダ映像を表示する際に、前記危険度が高い物標と低い物標とで表示方法を異ならせることが可能であることを特徴とするレーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
少なくとも物標からのエコー信号を検出する種類推定部を備え、
前記危険度検出部は、前記種類推定部が検出した物標からのエコー信号と、前記速度推定部が推定した前記相対速度と、に基づいて、当該物標の危険度を求めることを特徴とするレーダ装置。
【請求項3】
請求項1又は2に記載のレーダ装置であって、
前記表示器は、前記レーダ映像を表示する際に、前記物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能であることを特徴とするレーダ装置。
【請求項1】
水平面内で回転しながら信号の送受信を繰り返すように構成されたレーダアンテナと、
自装置周囲の物標の位置を示すレーダ映像を表示する表示器と、
自装置からの電波の放射方向成分における自装置と前記物標との相対速度を推定する速度推定部と、
前記速度推定部が推定した前記物標の相対速度に基づいて、当該物標の危険度を求める危険度検出部と、
を備え、
前記速度推定部は、前記レーダアンテナが今回受信したエコーと、当該レーダアンテナが直前に受信したエコーと、の間の位相変化に基づいて、前記相対速度を検出するとともに、
前記表示器は、前記レーダ映像を表示する際に、前記危険度が高い物標と低い物標とで表示方法を異ならせることが可能であることを特徴とするレーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
少なくとも物標からのエコー信号を検出する種類推定部を備え、
前記危険度検出部は、前記種類推定部が検出した物標からのエコー信号と、前記速度推定部が推定した前記相対速度と、に基づいて、当該物標の危険度を求めることを特徴とするレーダ装置。
【請求項3】
請求項1又は2に記載のレーダ装置であって、
前記表示器は、前記レーダ映像を表示する際に、前記物標の危険度に応じて色分けするとともに、当該物標からのエコーの強度に応じた色の濃さで各物標を表示することが可能であることを特徴とするレーダ装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−266292(P2010−266292A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−116992(P2009−116992)
【出願日】平成21年5月13日(2009.5.13)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月13日(2009.5.13)
【出願人】(000166247)古野電気株式会社 (441)
【Fターム(参考)】
[ Back to top ]