
レーダ装置
【課題】受信信号の組合せの問題を解き複数目標それぞれについて高精度な測位、測速処理を実現するレーダ装置を提供する。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーダ装置に関する。
【背景技術】
【0002】
従来、例えば下記非特許文献1には、マルチスタティックレーダにおいて、目標の距離(時刻)およびドップラ周波数を観測することで、目標への測位・測速演算により目標の3次元あるいは2次元位置ベクトルおよび速度ベクトルを推定するものが記載されている。このようなマルチスタティックレーダによる測位、測速処理は、目標の距離(時刻)およびドップラ周波数の情報を複数個用いるため、より高い精度での測位と、瞬間的な速度ベクトルの推定を行うことができる。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】K. C. HO: “An Accurate Algebraic Solution for Moving Source Location Using TDOA and FDOA Measurements”、IEEE Trans. On Signal Processing、Vol.52、No.9、Sep. 2004
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような、受信時刻、ドップラ周波数を用いたマルチスタティックレーダでの測位、測速処理においては、目標が複数存在する場合に、各観測点の複数の受信信号から各目標に対応した受信信号の組合せを知ることができないため、正しい測位、測速結果を得られないという問題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、受信信号の組合せの問題を解き、複数目標それぞれについて高精度な測位、測速処理を実現することが可能なレーダ装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明は、電波の放射を行う送信部と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサおよび各目標の方位を観測するための測角センサをそれぞれ有する複数の受信部と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部と、を備えたことを特徴とするレーダ装置にある。
【発明の効果】
【0007】
この発明では、受信信号の組合せの問題を解き、複数目標それぞれについて高精度な測位、測速処理を実現することが可能なレーダ装置を提供できる。
【図面の簡単な説明】
【0008】
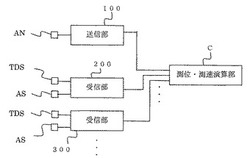
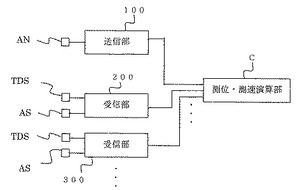
【図1】この発明によるレーダ装置の概略的構成を示す図である。
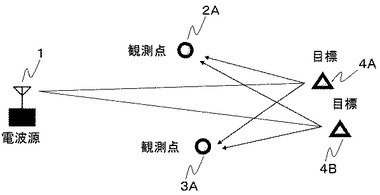
【図2】この発明の実施の形態1によるレーダ装置の観測システム配置を示す図である。
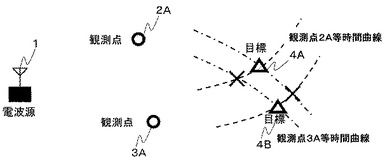
【図3】図2の構成における目標位置と受信時刻情報の関係を示す図である。
【図4】図2の構成における目標位置と測角値の関係を示す図である。
【図5】この発明の実施の形態1によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図6】この発明の実施の形態1によるレーダ装置の測位・測速演算部の別の例による処理の流れを機能ブロックで示す図である。
【図7】この発明の実施の形態1によるレーダ装置の測位・測速演算部のさらに別の例による処理の流れを機能ブロックで示す図である。
【図8】この発明の実施の形態2によるレーダ装置の時刻・周波数センサと測角センサの観測タイミングの一例を示す図である。
【図9】この発明の実施の形態2によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図10】この発明の実施の形態3によるレーダ装置に係る誤警報時の受信時刻と目標位置の関係を示す図である。
【図11】この発明の実施の形態3によるレーダ装置に係る誤警報時の測角値と目標位置の関係を示す図である。
【図12】この発明の実施の形態3によるレーダ装置に係る想定目標数と評価関数の最小値の大きさの関係を示す図である。
【図13】この発明の実施の形態3によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図14】この発明の実施の形態4によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図15】単一目標の場合の観測システムの送受信形態を示す図である。
【図16】複数目標の場合の観測システムの送受信形態を示す図である。
【図17】複数目標の場合の各観測点での受信信号の様子を時間−周波数領域上に示した図である。
【発明を実施するための形態】
【0009】
最初に、目標が複数存在する場合の問題点についてもう少し詳細に説明する。目標が複数の場合には、観測点ごとに複数の時刻およびドップラ周波数が観測される。このため、各目標の位置ベクトル、速度ベクトルを推定する際に用いる観測値の組合せを決定する必要があり、誤った観測値の組み合わせを用いた場合には、目標位置ベクトル、速度ベクトルを正しく推定できない。
【0010】
以下、図15〜図17を参照しながら、単一目標の場合の測位、測速方式について、続いて、複数目標の場合の問題点について説明を行う。
【0011】
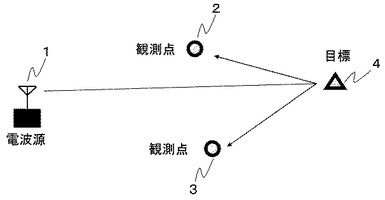
図15は単一目標の場合の一般的な観測システムの送受信形態であり、2次元の測位、測速処理を行う場合の構成を示している。電波源1から放射された電波が目標4で反射され、その反射波を観測点2および観測点3が受信する。また、電波源1、観測点2および観測点3は、GPSや電波源1から観測点2および観測点3への直接波の利用などの手段により、時刻同期が行われている。受信波から観測された受信時刻、ドップラ周波数の情報は1箇所すなわち測位・測速演算部(図示省略)に集約され、測位・測速演算処理が行われる。
【0012】
観測点2および観測点3で観測された受信時刻、ドップラ周波数と、目標の位置ベクトル、速度ベクトルの間には、以下の式(1)〜(4)の関係式が成り立つ。
【0013】
【数1】

【0014】
但し、
p:位置ベクトル
v:速度ベクトル
(添字の2、3、S、T:観測点2、観測点3、電波源、目標をそれぞれ示す)
τn:観測点nで観測された受信時刻
fn:観測点nで観測されたドップラ周波数
c:電波の伝搬速度
f0:送信周波数
を示す。
【0015】
測位・測速演算処理はこれらの式(1)〜(4)を、目標位置ベクトルおよび目標速度ベクトルについて解くことで、目標の2次元位置および速度ベクトルを推定する。なお、この連立方程式は非線形方程式であるが、線形近似を用いた反復改良法(Gauss-Newton法)などにより解くことができる。
【0016】
また、図15の場合は2次元の目標位置ベクトル、速度ベクトルの推定を考えた構成となっているが、観測点を増加させることで3次元の目標位置ベクトル、速度ベクトルの推定を行うこともできる。このとき式(1)〜(4)の測位、測速方程式に、増加させた観測点での受信時刻およびドップラ周波数の方程式を追加し、3次元目標位置ベクトルおよび3次元目標速度ベクトルについて連立方程式を解く。
【0017】
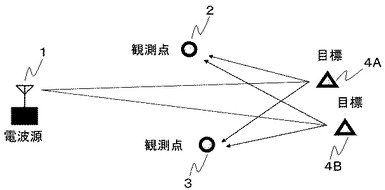
しかし、目標が複数の場合には図16に示すような観測システムの送受信形態となる。図16では図15と同様に、電波源1から電波が放射されるが、目標4Aと目標4Bの2つの目標が存在するため、観測点2および観測点3では目標4Aと目標4B両方からの反射波を受信する。
【0018】
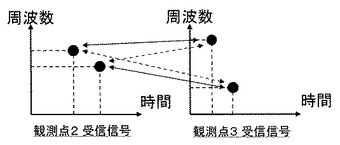
このときの観測点2および観測点3での、受信信号の様子を時間−周波数領域上に示したものを図17に示す。図17では右側の観測点2、左側の観測点3ともに、時間−周波数領域上に2つの受信信号が存在している。測位・測速演算処理は、観測点2、観測点3の受信信号のそれぞれ2つの受信信号の内、目標4Aに対応した受信信号の組合せ、目標4Bに対応した組合せそれぞれについて、式(1)〜(4)を解くことで行われる。しかし、受信信号の組合せを誤った場合には、正しい測位、測速結果を得ることはできない。そのため測位、測速対象の目標に対応した受信信号の組合せ問題を解くことが課題となる。
【0019】
この発明では、観測点間での受信信号の組合せ問題を解き、複数目標それぞれについて測位、測速処理を行うこと、また、各観測点の受信信号に目標反射波が存在していないにも関わらず存在すると誤認する誤警報が発生する場合に、複数目標の測位、測速処理を行うことを可能にする。
【0020】
この発明では、各観測点が受信時刻とドップラ周波数を観測するセンサの他に、目標の方位を観測する測角センサを有し、この測角センサの測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報を比較することで、受信信号の組合せ問題を解消し、複数目標それぞれについて高精度な測位、測速処理を実現する。
【0021】
以下、この発明によるレーダ装置を各実施の形態に従って図面を用いて説明する。なお、各実施の形態において、同一もしくは相当部分は同一符号で示し、重複する説明は省略する。
【0022】
実施の形態1.
図1はこの発明によるレーダ装置の概略的構成を示す図である。測位・測速演算部Cには電波源1である送信アンテナANを設けた送信部100と、観測点2A,3Aに位置するそれぞれに時刻・ドップラ周波数用センサTDSと測角センサASを設けた例えば2つの受信部200,300が有線または無線により通信可能に接続されている。送信部100、受信部200,300は、GPSや送信部100から受信部200,300への直接波の利用などの手段により、時刻同期が行われている。なお、観測点すなわ受信部の数は、目標の2次元の位置と速度を求める場合には2個以上、目標の3次元の位置と速度を求める場合には3個以上で構成する。また、送信部100、受信部200,300の位置は、これらが位置固定の場合には予め測位・測速演算部Cの記憶部(図示省略)に格納され、また移動可能な場合には、例えば各観測情報等に付される等して逐次、位置情報が送られてくるものとする。以下の説明では発明の理解を容易にするために、送信部100、受信部200,300の位置情報に関する説明は省略する(例えば既知の位置に固定として考える)。
【0023】
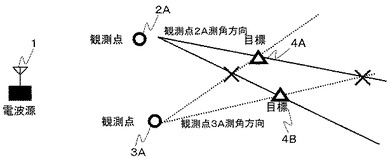
図2はこの発明の実施の形態1によるレーダ装置の観測システム配置を示す図である。図2の観測システムも図16と同様に2次元の測位、測速処理を行うことを想定している。図2では図16と同様に目標4Aと目標4Bの2目標に対して送信アンテナANを設けた送信部100に相当する電波源1から電波が放射されている。それぞれ受信部200,300に相当する観測点2Aおよび観測点3Aではそれらの目標からの反射波を受信し、受信時刻とドップラ周波数を観測する。ただし、この発明における観測点2Aと観測点3Aには、図1のそれぞれ受信部200,300に示すように、受信時刻とドップラ周波数を取得するRF(Radio Frequency)センサからなる時刻・ドップラ周波数用センサ(以下時刻・周波数センサ)TDSとは別に、目標の方位を観測する測角センサASが設けられている。測角センサASとしては、例えばRFの測角センサやIR(Infrared:赤外線)センサなどが挙げられる。このとき、複数の受信時刻の観測値と、複数の測角値は、センサが別のものであるため、どの受信時刻とどの測角値が同じ目標に対応しているかはわからない。このような状況において、受信時刻と測角値について、誤った組合せも含めた目標位置ベクトルの推定結果候補を比較することで、観測点間の受信信号の組合せ問題を解くのがこの発明の考え方となる。
【0024】
図3に図2の構成における目標位置と受信時刻情報の関係図を示す。図3において破線で描かれた2つの曲線は、観測点2Aでの時刻・周波数センサTDSにより得られる受信時刻の観測値から描いた等時間曲線を表している。同様に一点鎖線で描かれた2本の曲線は、観測点3Aでの時刻・周波数センサTDSにより得られる受信時刻の観測値から描いた等時間曲線を表している。複数観測点での受信時刻情報を用いた測位処理は、これらの曲線の交点を探すことを意味している。図3において曲線の交点の位置を見てみると、2つの目標が実際に存在する位置以外に、もう1組交点が存在することがわかる。このもう1組の交点位置が、受信信号の組合せを誤って測位処理を行った場合の測位結果であり、組み合わせ問題によって生じる虚像の位置である。
【0025】
図4に図3の場合と同様に、図2の構成における目標位置と測角値の関係図を示す。図4において観測点2Aを始点とした2つの実線は、観測点2Aの測角センサASの測角値方向を表している。同様に観測点3Aを始点とした2つの点線は、観測点3Aの測角センサASの測角値方向を表している。これらの直線の交点は、等時間曲線の交点と同様に、目標位置ベクトルの推定結果を表している。ただし、測角値方向の直線の交点の場合でも、目標が2つ存在することに起因して、真の目標位置以外にもう1組の虚像が存在している。
【0026】
受信時刻による測位に対応した図3と、測角値による測位に対応した図4を比較してみると、どちらも真の目標位置で同様に交点ができており、また、どちらももう1組の虚像に対応した交点が存在していることがわかる。しかし、虚像の位置に着目すると、図3と図4では虚像の位置が異なっている。この点を利用して、受信時刻での全ての目標位置ベクトル候補と、測角値での全ての目標位置ベクトル候補を比較し、最も近い目標位置ベクトル候補を真の測位結果とすれば、複数目標それぞれの位置がわかる。複数目標の位置がわかれば図3から受信時刻の組合せがわかり、図17から受信時刻に対応したドップラ周波数は既知であるので、ドップラ周波数の組合せもわかり、目標の速度ベクトルも同様に推定できる。
【0027】
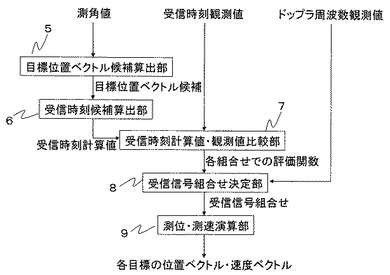
図5にこの発明の実施の形態1によるレーダ装置の測位・測速演算部Cの一例による処理の流れを機能ブロックで示す。図5では各観測点の測角センサASで観測された測角値が、目標位置ベクトル候補算出部5に送られる。目標位置ベクトル候補算出部5では、測角値の全ての組合せに対応した目標位置ベクトル候補が算出される。それらの目標位置ベクトル候補それぞれについて、上述の式(1)または式(2)を用いて、受信時刻候補算出部6において、受信時刻の計算値が算出される。算出された受信時刻計算値は、受信時刻計算値・観測値比較部7に送られる。受信時刻計算値・観測値比較部7では、受信時刻の計算値と各観測点の時刻・周波数センサTDSにより得られる実際の観測値の比較のために、以下のような評価関数が作成される。
【0028】
【数2】
【0029】
式(5)〜式(8)は観測点2Aでの受信信号組合せのための評価式である。pTKはk番目の目標位置ベクトル候補を表しており、奇数番目とその次の偶数番目の目標位置ベクトル候補が組み合わせとなっている。式(5)は目標位置ベクトル候補として、目標位置ベクトルpT1および目標位置ベクトルpT2の組合せを評価する場合の評価関数f(pT1,pT2)を表している。(スワングダッシュ)τn(pT1)はpT1から算出した観測点nでの受信時刻の計算値であり、τn,mは観測点nでの受信時刻のm個目の観測値である。この評価関数f(pT1,pT2)は、観測誤差の無い理想的な状況の場合pT1,pT2が受信時刻観測値τ2A,1,τ2A,2に対応している場合にその値が0となる。式(6)は目標位置ベクトルpT1および目標位置ベクトルpT2の組合せと、受信時刻観測値τ2A,1,τ2A,2の対応関係を逆転させたものである。また式(7)および式(8)はpT3,pT4の組み合わせについて、式(5)と式(6)と同様の評価式を作成したものである。
【0030】
このように、受信時刻計算値・観測値比較部7では、全てのpTkの組合せについて評価関数f(pTk,pT(k+1))の導出を行う。受信信号組合せ決定部8では、各組合せの評価関数(2目標の場合は式(5)〜式(8))の中から値が最小となる目標位置ベクトルの組合せを探索し、その各目標位置ベクトルに対応した受信時刻の観測値から受信信号の組合せを決定する。測位・測速演算部9では、受信信号組合せ決定部8で決定した各時刻・周波数センサTDSの受信時刻とドップラ周波数の観測値の組合せを用いて、各目標の測位・測速演算を式(1)〜(4)によって行う。これにより複数目標それぞれの位置ベクトル・速度ベクトルが推定される。
【0031】
図5の処理の流れでは、受信時刻から求めた目標位置ベクトルの候補と測角値から求めた目標位置ベクトルの候補の比較を行うのではなく、測角値から求めた目標位置ベクトル候補から受信時刻を計算し、その計算値と観測値の比較を行うというプロセスをとっている。これは測角値から目標位置ベクトルを導出する場合は線形連立方程式を解くのに対し、受信時刻から目標位置ベクトルを導出する場合は非線形連立方程式を解かねばならない点が理由である。図5の処理の流れを用いることで、非線形連立方程式をなるべく回避し、演算負荷を軽減する狙いがある。
【0032】
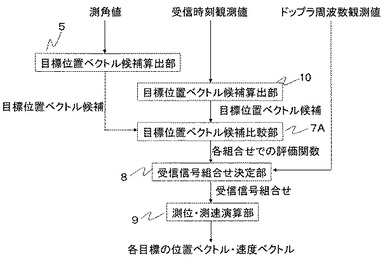
ただし、図6に示すように目標位置ベクトル候補算出部5,10により測角値と受信時刻の両方から目標位置ベクトル候補を導出し、目標位置ベクトル候補比較部7Aでそれらの候補を比較することで、組み合わせ問題を解くことも可能である。図6の処理の流れでは、各時刻・周波数センサTDSで観測した受信時刻情報から、目標位置ベクトル候補算出部10で、目標位置ベクトル候補が算出される。図5の場合と同様に、測角値からも目標位置ベクトル候補算出部5で目標位置ベクトル候補が算出される。受信時刻と測角値それぞれから算出された目標位置ベクトル候補は、目標位置ベクトル候補比較部7Aに送られ、虚像位置の違いから真の目標位置の組み合わせが選択される。これにより受信信号の組み合わせが決定され、複数目標それぞれの位置ベクトル・速度ベクトルを推定することができる。
【0033】
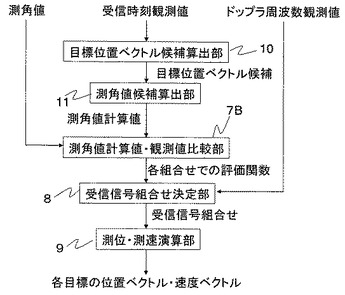
また、図5の測角値と受信時刻を入れ替えて、受信時刻から目標位置ベクトル候補を計算し、目標位置ベクトル候補から測角値を計算し、測角値の計算値と観測値を比較することで、組み合わせ問題を解くことも可能である。その場合の処理の流れを図7に示す。図7の処理の流れでは、図6と同様に各センサで観測した受信時刻情報から、目標位置ベクトル候補算出部10で目標位置ベクトル候補が算出される。図7の場合には、その目標位置ベクトル候補から、測角値候補算出部11で測角値の計算値が算出され、測角値計算値・観測値比較部7Bで測角値の観測値と比較を行うことで、受信信号の組み合わせを決定するものである。図6、図7のどちらの処理の流れも、比較するものは異なっているが、目標位置ベクトル候補の情報を利用して複数目標時の虚像を排除する点は図5に示した処理の流れと同様であり、この発明の範囲内である。
【0034】
ここまでの説明では目標数が2の場合の例を用いてきた。もちろん目標数が3以上の場合にも同様の処理が可能である。その場合は目標の数に応じて、受信信号の数が増加し、受信信号の組み合わせの数が増加することになる。そのため、評価関数の作成の対象となる計算値と観測値の組み合わせが増えることになるが、各組み合わせの評価関数の中から最小の値を探しだし、受信信号の組み合わせを決定する処理の流れに変わりはない。このことから、目標数が3以上の場合も同様に、各目標の位置ベクトルおよび速度ベクトルを推定することができる。
【0035】
このように、各観測点に受信時刻とドップラ周波数を観測する時刻・周波数センサTDSの他に、目標の方位を観測する測角センサASを有し、この測角センサASの測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報を比較することで、受信信号の組合せ問題を解き、測位・測速処理を行うことがこの発明の実施の形態1である。
【0036】
実施の形態2.
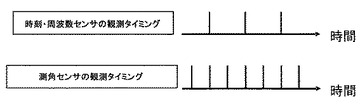
この発明の実施の形態2によるレーダ装置の概略的構成および配置は図1,2と同様である。ただし実施の形態2では、各観測点の測角センサASの観測レートが、受信時刻・ドップラ周波数を取得する時刻・周波数センサTDSよりも高い。その一例を図8に示す。図8の(a)は時刻・周波数センサTDSの観測タイミング、(b)は測角センサASの観測タイミングを示し、横軸が時間、各インパルスがセンサそれぞれの観測タイミングを表している。図8の例の場合、時刻・周波数センサTDSでの1回の観測に対して、測角センサASは2回の観測を行っている。この発明の実施の形態2ではこの点に着目し、実施の形態1での時刻・周波数センサTDSでの目標位置ベクトル候補と、測角センサASでの目標位置ベクトル候補の比較に加えて、両センサで導出された速度ベクトル候補の比較も行い、受信信号の組み合わせを決定する。
【0037】
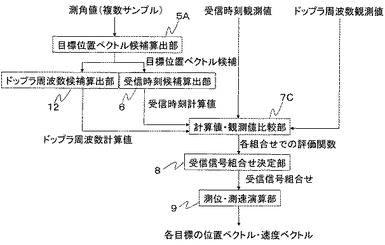
図9にこの発明の実施の形態2によるレーダ装置の測位・測速演算部Cにおける一例による処理の流れを機能ブロックで示す。図9は図5の処理を基本としているが,図5と異なり測角値が図8の観測タイミングに基づき複数時間サンプル分存在している。目標位置ベクトル候補算出部5Aでは、それらの複数時間サンプルについて測位を行い、複数の時間タイミングに対する目標位置ベクトル候補を導出する。ドップラ周波数候補算出部12では、それらの複数の時間タイミングの目標位置ベクトル候補から、目標位置候補それぞれに対する速度ベクトルを計算する。この計算は等速直線運動を仮定した差分によるものなどが考えられる。さらに計算された各速度ベクトルから、その値に対応した各時刻・周波数センサTDSでのドップラ周波数を計算する。ドップラ周波数候補算出部12で算出された各目標位置ベクトル候補に対応したドップラ周波数計算値は、計算値・観測値比較部7Cに、目標位置ベクトル候補算出部5Aの複数の時間タイミングの目標位置ベクトル候補により受信時刻候補算出部6で算出された受信時刻計算値とともに送られる。
【0038】
計算値・観測値比較部7Cでも実施の形態1の図5の処理の流れと同じく、測角値により算出された計算値と、時刻・周波数センサTDSからの観測値の比較のための評価関数の作成が行われる。ただし実施の形態2では、受信時刻のみならずドップラ周波数についても計算値と観測値の比較を行うため、2目標時の評価関数は以下の式となる。
【0039】
【数3】
【0040】
式(9)〜式(12)は観測点2Aでの受信信号組合せのための評価式である。(スワングダッシュ)fn(pTk)は目標位置ベクトル候補pTkに対応した複数時間サンプルの目標位置ベクトル候補から算出した観測点nでのドップラ周波数の計算値であり、fn、mは観測点nでのドップラ周波数のm個目の観測値である。また、aは受信時刻とドップラ周波数の次元の違いや、観測精度の差による影響を補整するための任意の定数である。計算値・観測値比較部7Cでは、全てのpTkの組合せについて評価関数f’(pTk,pT(k+1))の導出を行う。受信信号組合せ決定部8では、実施の形態1と同様に、評価関数の値が最小となる目標位置ベクトルの組合せを探索し、その各目標位置ベクトルに対応した受信信号の組合せを決定する。その後、測位・測速演算部9で決定された受信信号の組み合わせにより、測位・測速演算が行われ、複数目標それぞれの目標位置ベクトル・速度ベクトルが推定される。
【0041】
図9の処理の流れでは、複数時間サンプルの測角値から求めた、目標速度ベクトル候補からドップラ周波数を計算し、それらの計算値と時刻・周波数センサTDSの観測値を比較していた。しかし計算値・観測値比較部7Cにおいて、複数時間サンプルの測角値から求めた目標速度ベクトルと、時刻・周波数センサTDSで観測したドップラ周波数から求めた目標速度ベクトルを比較することで、受信信号の組み合わせを決定してもよい。その場合の評価関数は、測角値による目標速度ベクトル候補と、ドップラ周波数による目標速度ベクトル候補の2乗差を計算する形となる。
【0042】
このように、測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報の比較のみならず、速度ベクトルの情報の比較も行うことで、受信信号の組合せ問題を解き、複数目標それぞれに対して測位・測速処理を行うのがこの発明の実施の形態2である。
【0043】
実施の形態3.
この発明の実施の形態3は、各センサの観測値に誤警報が発生する場合に、誤警報に対処しながら、実施の形態1、2と同様に複数目標に対して測位・測速処理を行うものである。誤警報とは目標反射波による受信信号が存在していないにも関わらず、目標反射波の強度が低いあるいは雑音の強度が高いといった場合に、雑音を目標反射波と誤認してしまう現象である。このため時刻・周波数TDSでは目標反射波に対応したものとは別に、受信時刻・ドップラ周波数を観測してしまうし、測角センサASであれば目標に対応したものとは別に測角値を観測してしまう。この発明の実施の形態3によるレーダ装置の概略的構成および配置は図1,2と同様である。
【0044】
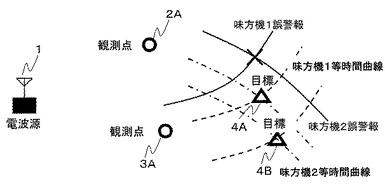
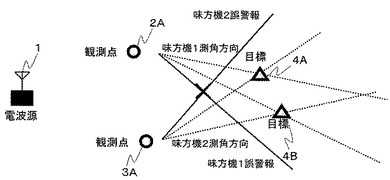
図10に誤警報時の受信時刻と目標位置の関係図を、図11に誤警報時の測角値と目標位置の関係図をそれぞれ示す。図10は図3の観測点2Aと観測点3Aの受信信号に、誤警報が1つずつ発生している場合を、図11は図4の観測点2Aと観測点3Aの測角値に、誤警報が1つずつ発生している場合をそれぞれ表している。
【0045】
この図10および図11の状態において、実施の形態1および2と同様に、受信時刻による目標位置ベクトル候補と測角値による目標速度ベクトルの比較、あるいはドップラ周波数による目標速度ベクトルと測角値による目標速度ベクトルの比較により、受信信号の組み合わせを決定することを考える。このとき、誤警報が存在しない場合と異なり、実際の目標数がわからないという問題が発生する。図10および図11の状態では、実際の目標数は2であるが、図中で×印で示した誤警報同士の交点を目標位置ベクトルとみなして、目標数を3と考え問題を解くことも可能である。もちろん、目標数を2と考えて解くことも、1と考えて解くことも可能である。そこでこの発明の実施の形態3では、これまでのように受信信号の組み合わせを解くと同時に、目標数の推定も同時に行い、最終的に各目標に対して測位・測速処理を行う。
【0046】
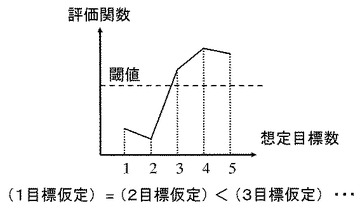
図10と図11の場合に、これまでの実施の形態1および実施の形態2での処理を考えると、目標数を3と想定した場合には真の目標位置ベクトル×2+誤警報による目標位置ベクトルの組み合わせを、測位結果として推定する。目標数を2と想定した場合には真の目標位置ベクトル×2を、目標数を1と想定した場合には真の目標位置ベクトルのどちらかを測位結果として推定する。前述の観測値と計算値や目標位置ベクトル候補同士の2乗差による評価関数を考える。目標数を2および1と想定した場合には、評価関数の値は無雑音の環境では0となる。しかし、目標数の想定を真の目標数より多い3とした場合、図10と図11に×印で示した誤警報による目標位置ベクトルの差異から、評価関数の誤警報に対応した項は、大きな値を持つことになってしまう。つまり想定目標数が実際の目標数より大きくなると、評価関数の値が0でなくなってしまう。実際には観測誤差が存在するため、図12のようになる。図12は横軸が想定目標数、縦軸が各想定目標数での評価関数の最小値の大きさを表している。
【0047】
このように、想定目標数が実際より多くなると、評価関数の値が急に大きくなる。この点を利用し、観測誤差等を考慮した任意の閾値を設定し、評価関数がその値を下回る想定目標数の中で、目標数が最大となるものを探索することで、誤警報環境下でも目標数を決定できる。これが実施の形態3の考え方である。
【0048】
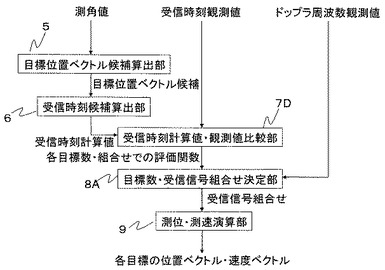
図13にこの発明の実施の形態3によるレーダ装置の測位・測速演算部Cの一例による処理の流れを機能ブロックで示す。この図13は実施の形態1の処理の流れの図5に対応したものである。図13では誤警報も含めた全ての測角値を用いて、目標位置ベクトル候補算出部5で目標位置ベクトル候補が算出される。それらの目標位置ベクトル候補から、受信時刻候補算出部6で受信時刻候補が算出され、受信時刻計算値・観測値比較部7Dに送られる。受信時刻計算値・観測値比較部7Dでは、受信時刻の組み合わせだけではなく、任意の範囲内で想定目標数も変化させた全ての組み合わせについて評価関数が計算される。目標数・受信信号組合せ決定部8Aでは、目標数が最大で閾値以下の評価関数の最小値を探索することで目標数および受信信号の組み合わせを決定する。その後、測位・測速演算部9で各目標の目標位置ベクトル、および速度ベクトルが推定される。
【0049】
図13は実施の形態1の図5の処理の流れに対応していたが、実施の形態1の図6や図7のように、目標位置ベクトル同士の比較や、測角値の計算値と観測値の比較によって、同様に誤警報に対処しながら測位・測速処理を行うことも可能である。
【0050】
このように、想定目標数を変化させながら、任意の閾値以下の値をとる評価関数の最小値を探索することで、誤警報環境下でも目標数を決定しながら、複数目標それぞれに対して測位・測速処理を行うのがこの発明の実施の形態3である。
【0051】
実施の形態4.
これまでの実施の形態1〜3では、時刻・周波数センサTDSの受信時刻とドップラ周波数を用いた測位・測速結果を、最終的な推定結果としていた。すなわち時刻・周波数センサTDSでの測位・測速処理において、複数目標に対処するために測角センサASの情報を用いていた。この発明の実施の形態4では実施の形態1〜3とは逆に、複数の測角センサASでの測角値による測位処理において、複数目標に対処するために時刻・周波数センサTDSの受信時刻情報を用いることを考える。実施の形態1〜3との1番の差異は、最終的な測位結果が、受信時刻情報によるのではなく、測角値によるということである。
【0052】
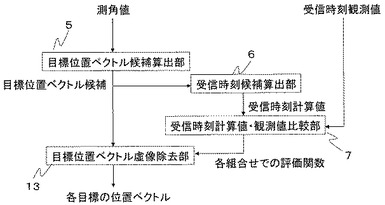
図14にこの発明の実施の形態4によるレーダ装置の測位・測速演算部Cにおける処理の流れを機能ブロックで示す。図14ではこれまでと同様に、測角センサの測角値を連携させ虚像も含めた目標位置ベクトル候補の算出を、目標位置ベクトル候補算出部5で行っている。それらの目標位置ベクトル候補から受信時刻候補算出部6で、受信時刻の計算値が算出され、受信時刻計算値・観測値比較部7で受信時刻の観測値と比較するための評価関数が算出される。その評価関数から、目標位置ベクトル虚像除去部13で目標位置ベクトル候補の中から、真の目標位置ベクトルが抽出される。
【0053】
図14は受信時刻の計算値と観測値の比較を行っていたが、実施の形態4においても目標位置ベクトル同士の比較や、測角値の計算値と観測値の比較によって、同様に誤警報に対処しながら測位・測速処理を行ってもよい。
【0054】
すなわち、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0055】
あるいは、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部点で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0056】
あるいは、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算した測角値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0057】
このように、実施の形態1〜3と同様の考え方で、複数測角センサの測角値から複数目標の測位を行う際に、時刻・周波数センサTDSの受信時刻の情報を用いて目標位置ベクトルの虚像の除去を行うのが、この発明の実施の形態4である。
【0058】
なお、上記各実施の形態において、送信部は複数の受信部のいずれかに一体に構成されていてもよい。
【0059】
また、この発明は上記各実施の形態に限定されるものではなく、これらの可能な組み合わせ全て含むことは云うまでもない。
【符号の説明】
【0060】
5,5A 目標位置ベクトル候補算出部、6 受信時刻候補算出部、7 受信時刻計算値・観測値比較部、7A 目標位置ベクトル候補比較部、7B 測角値計算値・観測値比較部、7C 計算値・観測値比較部、7D 受信時刻計算値・観測値比較部、8 受信信号組合せ決定部、8A 目標数・受信信号組合せ決定部、9 測位・測速演算部、10 目標位置ベクトル候補算出部、11 測角値候補算出部、12 ドップラ周波数候補算出部、13 目標位置ベクトル虚像除去部、100 送信部、200,300 受信部、AN 送信アンテナ、AS 測角センサ、C 測位・測速演算部、TDS 時刻・ドップラ周波数用センサ(時刻・周波数センサ)。
【技術分野】
【0001】
この発明は、レーダ装置に関する。
【背景技術】
【0002】
従来、例えば下記非特許文献1には、マルチスタティックレーダにおいて、目標の距離(時刻)およびドップラ周波数を観測することで、目標への測位・測速演算により目標の3次元あるいは2次元位置ベクトルおよび速度ベクトルを推定するものが記載されている。このようなマルチスタティックレーダによる測位、測速処理は、目標の距離(時刻)およびドップラ周波数の情報を複数個用いるため、より高い精度での測位と、瞬間的な速度ベクトルの推定を行うことができる。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】K. C. HO: “An Accurate Algebraic Solution for Moving Source Location Using TDOA and FDOA Measurements”、IEEE Trans. On Signal Processing、Vol.52、No.9、Sep. 2004
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような、受信時刻、ドップラ周波数を用いたマルチスタティックレーダでの測位、測速処理においては、目標が複数存在する場合に、各観測点の複数の受信信号から各目標に対応した受信信号の組合せを知ることができないため、正しい測位、測速結果を得られないという問題があった。
【0005】
この発明は上記のような課題を解決するためになされたもので、受信信号の組合せの問題を解き、複数目標それぞれについて高精度な測位、測速処理を実現することが可能なレーダ装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
この発明は、電波の放射を行う送信部と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサおよび各目標の方位を観測するための測角センサをそれぞれ有する複数の受信部と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部と、を備えたことを特徴とするレーダ装置にある。
【発明の効果】
【0007】
この発明では、受信信号の組合せの問題を解き、複数目標それぞれについて高精度な測位、測速処理を実現することが可能なレーダ装置を提供できる。
【図面の簡単な説明】
【0008】
【図1】この発明によるレーダ装置の概略的構成を示す図である。
【図2】この発明の実施の形態1によるレーダ装置の観測システム配置を示す図である。
【図3】図2の構成における目標位置と受信時刻情報の関係を示す図である。
【図4】図2の構成における目標位置と測角値の関係を示す図である。
【図5】この発明の実施の形態1によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図6】この発明の実施の形態1によるレーダ装置の測位・測速演算部の別の例による処理の流れを機能ブロックで示す図である。
【図7】この発明の実施の形態1によるレーダ装置の測位・測速演算部のさらに別の例による処理の流れを機能ブロックで示す図である。
【図8】この発明の実施の形態2によるレーダ装置の時刻・周波数センサと測角センサの観測タイミングの一例を示す図である。
【図9】この発明の実施の形態2によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図10】この発明の実施の形態3によるレーダ装置に係る誤警報時の受信時刻と目標位置の関係を示す図である。
【図11】この発明の実施の形態3によるレーダ装置に係る誤警報時の測角値と目標位置の関係を示す図である。
【図12】この発明の実施の形態3によるレーダ装置に係る想定目標数と評価関数の最小値の大きさの関係を示す図である。
【図13】この発明の実施の形態3によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図14】この発明の実施の形態4によるレーダ装置の測位・測速演算部の一例による処理の流れを機能ブロックで示す図である。
【図15】単一目標の場合の観測システムの送受信形態を示す図である。
【図16】複数目標の場合の観測システムの送受信形態を示す図である。
【図17】複数目標の場合の各観測点での受信信号の様子を時間−周波数領域上に示した図である。
【発明を実施するための形態】
【0009】
最初に、目標が複数存在する場合の問題点についてもう少し詳細に説明する。目標が複数の場合には、観測点ごとに複数の時刻およびドップラ周波数が観測される。このため、各目標の位置ベクトル、速度ベクトルを推定する際に用いる観測値の組合せを決定する必要があり、誤った観測値の組み合わせを用いた場合には、目標位置ベクトル、速度ベクトルを正しく推定できない。
【0010】
以下、図15〜図17を参照しながら、単一目標の場合の測位、測速方式について、続いて、複数目標の場合の問題点について説明を行う。
【0011】
図15は単一目標の場合の一般的な観測システムの送受信形態であり、2次元の測位、測速処理を行う場合の構成を示している。電波源1から放射された電波が目標4で反射され、その反射波を観測点2および観測点3が受信する。また、電波源1、観測点2および観測点3は、GPSや電波源1から観測点2および観測点3への直接波の利用などの手段により、時刻同期が行われている。受信波から観測された受信時刻、ドップラ周波数の情報は1箇所すなわち測位・測速演算部(図示省略)に集約され、測位・測速演算処理が行われる。
【0012】
観測点2および観測点3で観測された受信時刻、ドップラ周波数と、目標の位置ベクトル、速度ベクトルの間には、以下の式(1)〜(4)の関係式が成り立つ。
【0013】
【数1】
【0014】
但し、
p:位置ベクトル
v:速度ベクトル
(添字の2、3、S、T:観測点2、観測点3、電波源、目標をそれぞれ示す)
τn:観測点nで観測された受信時刻
fn:観測点nで観測されたドップラ周波数
c:電波の伝搬速度
f0:送信周波数
を示す。
【0015】
測位・測速演算処理はこれらの式(1)〜(4)を、目標位置ベクトルおよび目標速度ベクトルについて解くことで、目標の2次元位置および速度ベクトルを推定する。なお、この連立方程式は非線形方程式であるが、線形近似を用いた反復改良法(Gauss-Newton法)などにより解くことができる。
【0016】
また、図15の場合は2次元の目標位置ベクトル、速度ベクトルの推定を考えた構成となっているが、観測点を増加させることで3次元の目標位置ベクトル、速度ベクトルの推定を行うこともできる。このとき式(1)〜(4)の測位、測速方程式に、増加させた観測点での受信時刻およびドップラ周波数の方程式を追加し、3次元目標位置ベクトルおよび3次元目標速度ベクトルについて連立方程式を解く。
【0017】
しかし、目標が複数の場合には図16に示すような観測システムの送受信形態となる。図16では図15と同様に、電波源1から電波が放射されるが、目標4Aと目標4Bの2つの目標が存在するため、観測点2および観測点3では目標4Aと目標4B両方からの反射波を受信する。
【0018】
このときの観測点2および観測点3での、受信信号の様子を時間−周波数領域上に示したものを図17に示す。図17では右側の観測点2、左側の観測点3ともに、時間−周波数領域上に2つの受信信号が存在している。測位・測速演算処理は、観測点2、観測点3の受信信号のそれぞれ2つの受信信号の内、目標4Aに対応した受信信号の組合せ、目標4Bに対応した組合せそれぞれについて、式(1)〜(4)を解くことで行われる。しかし、受信信号の組合せを誤った場合には、正しい測位、測速結果を得ることはできない。そのため測位、測速対象の目標に対応した受信信号の組合せ問題を解くことが課題となる。
【0019】
この発明では、観測点間での受信信号の組合せ問題を解き、複数目標それぞれについて測位、測速処理を行うこと、また、各観測点の受信信号に目標反射波が存在していないにも関わらず存在すると誤認する誤警報が発生する場合に、複数目標の測位、測速処理を行うことを可能にする。
【0020】
この発明では、各観測点が受信時刻とドップラ周波数を観測するセンサの他に、目標の方位を観測する測角センサを有し、この測角センサの測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報を比較することで、受信信号の組合せ問題を解消し、複数目標それぞれについて高精度な測位、測速処理を実現する。
【0021】
以下、この発明によるレーダ装置を各実施の形態に従って図面を用いて説明する。なお、各実施の形態において、同一もしくは相当部分は同一符号で示し、重複する説明は省略する。
【0022】
実施の形態1.
図1はこの発明によるレーダ装置の概略的構成を示す図である。測位・測速演算部Cには電波源1である送信アンテナANを設けた送信部100と、観測点2A,3Aに位置するそれぞれに時刻・ドップラ周波数用センサTDSと測角センサASを設けた例えば2つの受信部200,300が有線または無線により通信可能に接続されている。送信部100、受信部200,300は、GPSや送信部100から受信部200,300への直接波の利用などの手段により、時刻同期が行われている。なお、観測点すなわ受信部の数は、目標の2次元の位置と速度を求める場合には2個以上、目標の3次元の位置と速度を求める場合には3個以上で構成する。また、送信部100、受信部200,300の位置は、これらが位置固定の場合には予め測位・測速演算部Cの記憶部(図示省略)に格納され、また移動可能な場合には、例えば各観測情報等に付される等して逐次、位置情報が送られてくるものとする。以下の説明では発明の理解を容易にするために、送信部100、受信部200,300の位置情報に関する説明は省略する(例えば既知の位置に固定として考える)。
【0023】
図2はこの発明の実施の形態1によるレーダ装置の観測システム配置を示す図である。図2の観測システムも図16と同様に2次元の測位、測速処理を行うことを想定している。図2では図16と同様に目標4Aと目標4Bの2目標に対して送信アンテナANを設けた送信部100に相当する電波源1から電波が放射されている。それぞれ受信部200,300に相当する観測点2Aおよび観測点3Aではそれらの目標からの反射波を受信し、受信時刻とドップラ周波数を観測する。ただし、この発明における観測点2Aと観測点3Aには、図1のそれぞれ受信部200,300に示すように、受信時刻とドップラ周波数を取得するRF(Radio Frequency)センサからなる時刻・ドップラ周波数用センサ(以下時刻・周波数センサ)TDSとは別に、目標の方位を観測する測角センサASが設けられている。測角センサASとしては、例えばRFの測角センサやIR(Infrared:赤外線)センサなどが挙げられる。このとき、複数の受信時刻の観測値と、複数の測角値は、センサが別のものであるため、どの受信時刻とどの測角値が同じ目標に対応しているかはわからない。このような状況において、受信時刻と測角値について、誤った組合せも含めた目標位置ベクトルの推定結果候補を比較することで、観測点間の受信信号の組合せ問題を解くのがこの発明の考え方となる。
【0024】
図3に図2の構成における目標位置と受信時刻情報の関係図を示す。図3において破線で描かれた2つの曲線は、観測点2Aでの時刻・周波数センサTDSにより得られる受信時刻の観測値から描いた等時間曲線を表している。同様に一点鎖線で描かれた2本の曲線は、観測点3Aでの時刻・周波数センサTDSにより得られる受信時刻の観測値から描いた等時間曲線を表している。複数観測点での受信時刻情報を用いた測位処理は、これらの曲線の交点を探すことを意味している。図3において曲線の交点の位置を見てみると、2つの目標が実際に存在する位置以外に、もう1組交点が存在することがわかる。このもう1組の交点位置が、受信信号の組合せを誤って測位処理を行った場合の測位結果であり、組み合わせ問題によって生じる虚像の位置である。
【0025】
図4に図3の場合と同様に、図2の構成における目標位置と測角値の関係図を示す。図4において観測点2Aを始点とした2つの実線は、観測点2Aの測角センサASの測角値方向を表している。同様に観測点3Aを始点とした2つの点線は、観測点3Aの測角センサASの測角値方向を表している。これらの直線の交点は、等時間曲線の交点と同様に、目標位置ベクトルの推定結果を表している。ただし、測角値方向の直線の交点の場合でも、目標が2つ存在することに起因して、真の目標位置以外にもう1組の虚像が存在している。
【0026】
受信時刻による測位に対応した図3と、測角値による測位に対応した図4を比較してみると、どちらも真の目標位置で同様に交点ができており、また、どちらももう1組の虚像に対応した交点が存在していることがわかる。しかし、虚像の位置に着目すると、図3と図4では虚像の位置が異なっている。この点を利用して、受信時刻での全ての目標位置ベクトル候補と、測角値での全ての目標位置ベクトル候補を比較し、最も近い目標位置ベクトル候補を真の測位結果とすれば、複数目標それぞれの位置がわかる。複数目標の位置がわかれば図3から受信時刻の組合せがわかり、図17から受信時刻に対応したドップラ周波数は既知であるので、ドップラ周波数の組合せもわかり、目標の速度ベクトルも同様に推定できる。
【0027】
図5にこの発明の実施の形態1によるレーダ装置の測位・測速演算部Cの一例による処理の流れを機能ブロックで示す。図5では各観測点の測角センサASで観測された測角値が、目標位置ベクトル候補算出部5に送られる。目標位置ベクトル候補算出部5では、測角値の全ての組合せに対応した目標位置ベクトル候補が算出される。それらの目標位置ベクトル候補それぞれについて、上述の式(1)または式(2)を用いて、受信時刻候補算出部6において、受信時刻の計算値が算出される。算出された受信時刻計算値は、受信時刻計算値・観測値比較部7に送られる。受信時刻計算値・観測値比較部7では、受信時刻の計算値と各観測点の時刻・周波数センサTDSにより得られる実際の観測値の比較のために、以下のような評価関数が作成される。
【0028】
【数2】
【0029】
式(5)〜式(8)は観測点2Aでの受信信号組合せのための評価式である。pTKはk番目の目標位置ベクトル候補を表しており、奇数番目とその次の偶数番目の目標位置ベクトル候補が組み合わせとなっている。式(5)は目標位置ベクトル候補として、目標位置ベクトルpT1および目標位置ベクトルpT2の組合せを評価する場合の評価関数f(pT1,pT2)を表している。(スワングダッシュ)τn(pT1)はpT1から算出した観測点nでの受信時刻の計算値であり、τn,mは観測点nでの受信時刻のm個目の観測値である。この評価関数f(pT1,pT2)は、観測誤差の無い理想的な状況の場合pT1,pT2が受信時刻観測値τ2A,1,τ2A,2に対応している場合にその値が0となる。式(6)は目標位置ベクトルpT1および目標位置ベクトルpT2の組合せと、受信時刻観測値τ2A,1,τ2A,2の対応関係を逆転させたものである。また式(7)および式(8)はpT3,pT4の組み合わせについて、式(5)と式(6)と同様の評価式を作成したものである。
【0030】
このように、受信時刻計算値・観測値比較部7では、全てのpTkの組合せについて評価関数f(pTk,pT(k+1))の導出を行う。受信信号組合せ決定部8では、各組合せの評価関数(2目標の場合は式(5)〜式(8))の中から値が最小となる目標位置ベクトルの組合せを探索し、その各目標位置ベクトルに対応した受信時刻の観測値から受信信号の組合せを決定する。測位・測速演算部9では、受信信号組合せ決定部8で決定した各時刻・周波数センサTDSの受信時刻とドップラ周波数の観測値の組合せを用いて、各目標の測位・測速演算を式(1)〜(4)によって行う。これにより複数目標それぞれの位置ベクトル・速度ベクトルが推定される。
【0031】
図5の処理の流れでは、受信時刻から求めた目標位置ベクトルの候補と測角値から求めた目標位置ベクトルの候補の比較を行うのではなく、測角値から求めた目標位置ベクトル候補から受信時刻を計算し、その計算値と観測値の比較を行うというプロセスをとっている。これは測角値から目標位置ベクトルを導出する場合は線形連立方程式を解くのに対し、受信時刻から目標位置ベクトルを導出する場合は非線形連立方程式を解かねばならない点が理由である。図5の処理の流れを用いることで、非線形連立方程式をなるべく回避し、演算負荷を軽減する狙いがある。
【0032】
ただし、図6に示すように目標位置ベクトル候補算出部5,10により測角値と受信時刻の両方から目標位置ベクトル候補を導出し、目標位置ベクトル候補比較部7Aでそれらの候補を比較することで、組み合わせ問題を解くことも可能である。図6の処理の流れでは、各時刻・周波数センサTDSで観測した受信時刻情報から、目標位置ベクトル候補算出部10で、目標位置ベクトル候補が算出される。図5の場合と同様に、測角値からも目標位置ベクトル候補算出部5で目標位置ベクトル候補が算出される。受信時刻と測角値それぞれから算出された目標位置ベクトル候補は、目標位置ベクトル候補比較部7Aに送られ、虚像位置の違いから真の目標位置の組み合わせが選択される。これにより受信信号の組み合わせが決定され、複数目標それぞれの位置ベクトル・速度ベクトルを推定することができる。
【0033】
また、図5の測角値と受信時刻を入れ替えて、受信時刻から目標位置ベクトル候補を計算し、目標位置ベクトル候補から測角値を計算し、測角値の計算値と観測値を比較することで、組み合わせ問題を解くことも可能である。その場合の処理の流れを図7に示す。図7の処理の流れでは、図6と同様に各センサで観測した受信時刻情報から、目標位置ベクトル候補算出部10で目標位置ベクトル候補が算出される。図7の場合には、その目標位置ベクトル候補から、測角値候補算出部11で測角値の計算値が算出され、測角値計算値・観測値比較部7Bで測角値の観測値と比較を行うことで、受信信号の組み合わせを決定するものである。図6、図7のどちらの処理の流れも、比較するものは異なっているが、目標位置ベクトル候補の情報を利用して複数目標時の虚像を排除する点は図5に示した処理の流れと同様であり、この発明の範囲内である。
【0034】
ここまでの説明では目標数が2の場合の例を用いてきた。もちろん目標数が3以上の場合にも同様の処理が可能である。その場合は目標の数に応じて、受信信号の数が増加し、受信信号の組み合わせの数が増加することになる。そのため、評価関数の作成の対象となる計算値と観測値の組み合わせが増えることになるが、各組み合わせの評価関数の中から最小の値を探しだし、受信信号の組み合わせを決定する処理の流れに変わりはない。このことから、目標数が3以上の場合も同様に、各目標の位置ベクトルおよび速度ベクトルを推定することができる。
【0035】
このように、各観測点に受信時刻とドップラ周波数を観測する時刻・周波数センサTDSの他に、目標の方位を観測する測角センサASを有し、この測角センサASの測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報を比較することで、受信信号の組合せ問題を解き、測位・測速処理を行うことがこの発明の実施の形態1である。
【0036】
実施の形態2.
この発明の実施の形態2によるレーダ装置の概略的構成および配置は図1,2と同様である。ただし実施の形態2では、各観測点の測角センサASの観測レートが、受信時刻・ドップラ周波数を取得する時刻・周波数センサTDSよりも高い。その一例を図8に示す。図8の(a)は時刻・周波数センサTDSの観測タイミング、(b)は測角センサASの観測タイミングを示し、横軸が時間、各インパルスがセンサそれぞれの観測タイミングを表している。図8の例の場合、時刻・周波数センサTDSでの1回の観測に対して、測角センサASは2回の観測を行っている。この発明の実施の形態2ではこの点に着目し、実施の形態1での時刻・周波数センサTDSでの目標位置ベクトル候補と、測角センサASでの目標位置ベクトル候補の比較に加えて、両センサで導出された速度ベクトル候補の比較も行い、受信信号の組み合わせを決定する。
【0037】
図9にこの発明の実施の形態2によるレーダ装置の測位・測速演算部Cにおける一例による処理の流れを機能ブロックで示す。図9は図5の処理を基本としているが,図5と異なり測角値が図8の観測タイミングに基づき複数時間サンプル分存在している。目標位置ベクトル候補算出部5Aでは、それらの複数時間サンプルについて測位を行い、複数の時間タイミングに対する目標位置ベクトル候補を導出する。ドップラ周波数候補算出部12では、それらの複数の時間タイミングの目標位置ベクトル候補から、目標位置候補それぞれに対する速度ベクトルを計算する。この計算は等速直線運動を仮定した差分によるものなどが考えられる。さらに計算された各速度ベクトルから、その値に対応した各時刻・周波数センサTDSでのドップラ周波数を計算する。ドップラ周波数候補算出部12で算出された各目標位置ベクトル候補に対応したドップラ周波数計算値は、計算値・観測値比較部7Cに、目標位置ベクトル候補算出部5Aの複数の時間タイミングの目標位置ベクトル候補により受信時刻候補算出部6で算出された受信時刻計算値とともに送られる。
【0038】
計算値・観測値比較部7Cでも実施の形態1の図5の処理の流れと同じく、測角値により算出された計算値と、時刻・周波数センサTDSからの観測値の比較のための評価関数の作成が行われる。ただし実施の形態2では、受信時刻のみならずドップラ周波数についても計算値と観測値の比較を行うため、2目標時の評価関数は以下の式となる。
【0039】
【数3】
【0040】
式(9)〜式(12)は観測点2Aでの受信信号組合せのための評価式である。(スワングダッシュ)fn(pTk)は目標位置ベクトル候補pTkに対応した複数時間サンプルの目標位置ベクトル候補から算出した観測点nでのドップラ周波数の計算値であり、fn、mは観測点nでのドップラ周波数のm個目の観測値である。また、aは受信時刻とドップラ周波数の次元の違いや、観測精度の差による影響を補整するための任意の定数である。計算値・観測値比較部7Cでは、全てのpTkの組合せについて評価関数f’(pTk,pT(k+1))の導出を行う。受信信号組合せ決定部8では、実施の形態1と同様に、評価関数の値が最小となる目標位置ベクトルの組合せを探索し、その各目標位置ベクトルに対応した受信信号の組合せを決定する。その後、測位・測速演算部9で決定された受信信号の組み合わせにより、測位・測速演算が行われ、複数目標それぞれの目標位置ベクトル・速度ベクトルが推定される。
【0041】
図9の処理の流れでは、複数時間サンプルの測角値から求めた、目標速度ベクトル候補からドップラ周波数を計算し、それらの計算値と時刻・周波数センサTDSの観測値を比較していた。しかし計算値・観測値比較部7Cにおいて、複数時間サンプルの測角値から求めた目標速度ベクトルと、時刻・周波数センサTDSで観測したドップラ周波数から求めた目標速度ベクトルを比較することで、受信信号の組み合わせを決定してもよい。その場合の評価関数は、測角値による目標速度ベクトル候補と、ドップラ周波数による目標速度ベクトル候補の2乗差を計算する形となる。
【0042】
このように、測角値による目標位置ベクトルの情報と、受信時刻による目標位置ベクトルの情報の比較のみならず、速度ベクトルの情報の比較も行うことで、受信信号の組合せ問題を解き、複数目標それぞれに対して測位・測速処理を行うのがこの発明の実施の形態2である。
【0043】
実施の形態3.
この発明の実施の形態3は、各センサの観測値に誤警報が発生する場合に、誤警報に対処しながら、実施の形態1、2と同様に複数目標に対して測位・測速処理を行うものである。誤警報とは目標反射波による受信信号が存在していないにも関わらず、目標反射波の強度が低いあるいは雑音の強度が高いといった場合に、雑音を目標反射波と誤認してしまう現象である。このため時刻・周波数TDSでは目標反射波に対応したものとは別に、受信時刻・ドップラ周波数を観測してしまうし、測角センサASであれば目標に対応したものとは別に測角値を観測してしまう。この発明の実施の形態3によるレーダ装置の概略的構成および配置は図1,2と同様である。
【0044】
図10に誤警報時の受信時刻と目標位置の関係図を、図11に誤警報時の測角値と目標位置の関係図をそれぞれ示す。図10は図3の観測点2Aと観測点3Aの受信信号に、誤警報が1つずつ発生している場合を、図11は図4の観測点2Aと観測点3Aの測角値に、誤警報が1つずつ発生している場合をそれぞれ表している。
【0045】
この図10および図11の状態において、実施の形態1および2と同様に、受信時刻による目標位置ベクトル候補と測角値による目標速度ベクトルの比較、あるいはドップラ周波数による目標速度ベクトルと測角値による目標速度ベクトルの比較により、受信信号の組み合わせを決定することを考える。このとき、誤警報が存在しない場合と異なり、実際の目標数がわからないという問題が発生する。図10および図11の状態では、実際の目標数は2であるが、図中で×印で示した誤警報同士の交点を目標位置ベクトルとみなして、目標数を3と考え問題を解くことも可能である。もちろん、目標数を2と考えて解くことも、1と考えて解くことも可能である。そこでこの発明の実施の形態3では、これまでのように受信信号の組み合わせを解くと同時に、目標数の推定も同時に行い、最終的に各目標に対して測位・測速処理を行う。
【0046】
図10と図11の場合に、これまでの実施の形態1および実施の形態2での処理を考えると、目標数を3と想定した場合には真の目標位置ベクトル×2+誤警報による目標位置ベクトルの組み合わせを、測位結果として推定する。目標数を2と想定した場合には真の目標位置ベクトル×2を、目標数を1と想定した場合には真の目標位置ベクトルのどちらかを測位結果として推定する。前述の観測値と計算値や目標位置ベクトル候補同士の2乗差による評価関数を考える。目標数を2および1と想定した場合には、評価関数の値は無雑音の環境では0となる。しかし、目標数の想定を真の目標数より多い3とした場合、図10と図11に×印で示した誤警報による目標位置ベクトルの差異から、評価関数の誤警報に対応した項は、大きな値を持つことになってしまう。つまり想定目標数が実際の目標数より大きくなると、評価関数の値が0でなくなってしまう。実際には観測誤差が存在するため、図12のようになる。図12は横軸が想定目標数、縦軸が各想定目標数での評価関数の最小値の大きさを表している。
【0047】
このように、想定目標数が実際より多くなると、評価関数の値が急に大きくなる。この点を利用し、観測誤差等を考慮した任意の閾値を設定し、評価関数がその値を下回る想定目標数の中で、目標数が最大となるものを探索することで、誤警報環境下でも目標数を決定できる。これが実施の形態3の考え方である。
【0048】
図13にこの発明の実施の形態3によるレーダ装置の測位・測速演算部Cの一例による処理の流れを機能ブロックで示す。この図13は実施の形態1の処理の流れの図5に対応したものである。図13では誤警報も含めた全ての測角値を用いて、目標位置ベクトル候補算出部5で目標位置ベクトル候補が算出される。それらの目標位置ベクトル候補から、受信時刻候補算出部6で受信時刻候補が算出され、受信時刻計算値・観測値比較部7Dに送られる。受信時刻計算値・観測値比較部7Dでは、受信時刻の組み合わせだけではなく、任意の範囲内で想定目標数も変化させた全ての組み合わせについて評価関数が計算される。目標数・受信信号組合せ決定部8Aでは、目標数が最大で閾値以下の評価関数の最小値を探索することで目標数および受信信号の組み合わせを決定する。その後、測位・測速演算部9で各目標の目標位置ベクトル、および速度ベクトルが推定される。
【0049】
図13は実施の形態1の図5の処理の流れに対応していたが、実施の形態1の図6や図7のように、目標位置ベクトル同士の比較や、測角値の計算値と観測値の比較によって、同様に誤警報に対処しながら測位・測速処理を行うことも可能である。
【0050】
このように、想定目標数を変化させながら、任意の閾値以下の値をとる評価関数の最小値を探索することで、誤警報環境下でも目標数を決定しながら、複数目標それぞれに対して測位・測速処理を行うのがこの発明の実施の形態3である。
【0051】
実施の形態4.
これまでの実施の形態1〜3では、時刻・周波数センサTDSの受信時刻とドップラ周波数を用いた測位・測速結果を、最終的な推定結果としていた。すなわち時刻・周波数センサTDSでの測位・測速処理において、複数目標に対処するために測角センサASの情報を用いていた。この発明の実施の形態4では実施の形態1〜3とは逆に、複数の測角センサASでの測角値による測位処理において、複数目標に対処するために時刻・周波数センサTDSの受信時刻情報を用いることを考える。実施の形態1〜3との1番の差異は、最終的な測位結果が、受信時刻情報によるのではなく、測角値によるということである。
【0052】
図14にこの発明の実施の形態4によるレーダ装置の測位・測速演算部Cにおける処理の流れを機能ブロックで示す。図14ではこれまでと同様に、測角センサの測角値を連携させ虚像も含めた目標位置ベクトル候補の算出を、目標位置ベクトル候補算出部5で行っている。それらの目標位置ベクトル候補から受信時刻候補算出部6で、受信時刻の計算値が算出され、受信時刻計算値・観測値比較部7で受信時刻の観測値と比較するための評価関数が算出される。その評価関数から、目標位置ベクトル虚像除去部13で目標位置ベクトル候補の中から、真の目標位置ベクトルが抽出される。
【0053】
図14は受信時刻の計算値と観測値の比較を行っていたが、実施の形態4においても目標位置ベクトル同士の比較や、測角値の計算値と観測値の比較によって、同様に誤警報に対処しながら測位・測速処理を行ってもよい。
【0054】
すなわち、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0055】
あるいは、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部点で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0056】
あるいは、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算した測角値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定する。
【0057】
このように、実施の形態1〜3と同様の考え方で、複数測角センサの測角値から複数目標の測位を行う際に、時刻・周波数センサTDSの受信時刻の情報を用いて目標位置ベクトルの虚像の除去を行うのが、この発明の実施の形態4である。
【0058】
なお、上記各実施の形態において、送信部は複数の受信部のいずれかに一体に構成されていてもよい。
【0059】
また、この発明は上記各実施の形態に限定されるものではなく、これらの可能な組み合わせ全て含むことは云うまでもない。
【符号の説明】
【0060】
5,5A 目標位置ベクトル候補算出部、6 受信時刻候補算出部、7 受信時刻計算値・観測値比較部、7A 目標位置ベクトル候補比較部、7B 測角値計算値・観測値比較部、7C 計算値・観測値比較部、7D 受信時刻計算値・観測値比較部、8 受信信号組合せ決定部、8A 目標数・受信信号組合せ決定部、9 測位・測速演算部、10 目標位置ベクトル候補算出部、11 測角値候補算出部、12 ドップラ周波数候補算出部、13 目標位置ベクトル虚像除去部、100 送信部、200,300 受信部、AN 送信アンテナ、AS 測角センサ、C 測位・測速演算部、TDS 時刻・ドップラ周波数用センサ(時刻・周波数センサ)。
【特許請求の範囲】
【請求項1】
電波の放射を行う送信部と、
異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサおよび各目標の方位を観測するための測角センサをそれぞれ有する複数の受信部と、
前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部と、
を備えたことを特徴とするレーダ装置。
【請求項2】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項4】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算された各受信部での測角値の計算値を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項5】
測位・測速演算部が各受信部の測角値の複数時間サンプルから目標の速度ベクトルを推定する第2の手段を含み、
第1の手段が、目標位置ベクトルまたは受信時刻または測角値の情報の比較のみならず、各受信部の測角値から求めた速度ベクトルから計算した各受信部でのドップラ周波数の計算値と、各受信部で観測されたドップラ周波数の観測値も比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から4までのいずれか1項に記載のレーダ装置。
【請求項6】
測位・測速演算部が各受信部の測角値の複数時間サンプルから目標の速度ベクトルを推定する第2の手段を含み、
第1の手段が、目標位置ベクトルまたは受信時刻または測角値の情報の比較のみならず、各受信部の測角値から求めた速度ベクトルと、各受信部で観測されたドップラ周波数から計算した速度ベクトルも比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から4までのいずれか1項に記載のレーダ装置。
【請求項7】
測位・測速演算部が、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせ決定時に、想定目標数を変化させながら組み合わせの評価を行うことで目標数を決定し複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から6までのいずれか1項に記載のレーダ装置。
【請求項8】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項9】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部点で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項10】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算した測角値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項11】
上記各受信部間での測角値の組み合わせ決定時に、想定目標数を変化させながら組み合わせの評価を行うことで目標数を決定し複数目標それぞれの位置ベクトルを推定することを特徴とする請求項8から10までのいずれか1項に記載のレーダ装置。
【請求項12】
送信部がいずれかの受信部に一体に設けられたことを特徴とする請求項1から11までのいずれか1項に記載のレーダ装置。
【請求項13】
2個以上の受信部を備え、各目標の2次元の位置と速度を求めることを特徴とする請求項1から12までのいずれか1項に記載のレーダ装置。
【請求項14】
3個以上の受信部を備え、各目標の3次元の位置と速度を求めることを特徴とする請求項1から12までのいずれか1項に記載のレーダ装置。
【請求項15】
測角センサとして、IRセンサを用いることを特徴とする請求項1から14までのいずれか1項に記載のレーダ装置。
【請求項1】
電波の放射を行う送信部と、
異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサおよび各目標の方位を観測するための測角センサをそれぞれ有する複数の受信部と、
前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部と、
を備えたことを特徴とするレーダ装置。
【請求項2】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項3】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項4】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算された各受信部での測角値の計算値を比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項5】
測位・測速演算部が各受信部の測角値の複数時間サンプルから目標の速度ベクトルを推定する第2の手段を含み、
第1の手段が、目標位置ベクトルまたは受信時刻または測角値の情報の比較のみならず、各受信部の測角値から求めた速度ベクトルから計算した各受信部でのドップラ周波数の計算値と、各受信部で観測されたドップラ周波数の観測値も比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から4までのいずれか1項に記載のレーダ装置。
【請求項6】
測位・測速演算部が各受信部の測角値の複数時間サンプルから目標の速度ベクトルを推定する第2の手段を含み、
第1の手段が、目標位置ベクトルまたは受信時刻または測角値の情報の比較のみならず、各受信部の測角値から求めた速度ベクトルと、各受信部で観測されたドップラ周波数から計算した速度ベクトルも比較することで、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせを決定し、複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から4までのいずれか1項に記載のレーダ装置。
【請求項7】
測位・測速演算部が、各受信部間での受信時刻観測値とドップラ周波数観測値の組み合わせ決定時に、想定目標数を変化させながら組み合わせの評価を行うことで目標数を決定し複数目標それぞれの位置ベクトルと速度ベクトルを推定することを特徴とする請求項2から6までのいずれか1項に記載のレーダ装置。
【請求項8】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補から計算した各受信部での受信時刻計算値と、各受信部で観測された受信時刻観測値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項9】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値から求めた目標位置ベクトル候補と、各受信部点で観測された受信時刻観測値から求めた目標位置ベクトル候補を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項10】
測位・測速演算部の第1の手段が、複数の目標が存在する場合に、各受信部で観測された測角値と、各受信部で観測された受信時刻観測値から求めた目標位置ベクトル候補から計算した測角値を比較することで、各受信部間での測角値の組み合わせを決定し、複数目標それぞれの位置ベクトルを推定することを特徴とする請求項1に記載のレーダ装置。
【請求項11】
上記各受信部間での測角値の組み合わせ決定時に、想定目標数を変化させながら組み合わせの評価を行うことで目標数を決定し複数目標それぞれの位置ベクトルを推定することを特徴とする請求項8から10までのいずれか1項に記載のレーダ装置。
【請求項12】
送信部がいずれかの受信部に一体に設けられたことを特徴とする請求項1から11までのいずれか1項に記載のレーダ装置。
【請求項13】
2個以上の受信部を備え、各目標の2次元の位置と速度を求めることを特徴とする請求項1から12までのいずれか1項に記載のレーダ装置。
【請求項14】
3個以上の受信部を備え、各目標の3次元の位置と速度を求めることを特徴とする請求項1から12までのいずれか1項に記載のレーダ装置。
【請求項15】
測角センサとして、IRセンサを用いることを特徴とする請求項1から14までのいずれか1項に記載のレーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2011−247596(P2011−247596A)
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願番号】特願2010−117698(P2010−117698)
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年12月8日(2011.12.8)
【国際特許分類】
【出願日】平成22年5月21日(2010.5.21)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]