
レーダ装置
【課題】航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を得る。
【解決手段】追尾演算部17でのスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて操作表示部18に送出する。一方、複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対して、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、受けとった目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示する。
【解決手段】追尾演算部17でのスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて操作表示部18に送出する。一方、複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対して、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、受けとった目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、誤追尾による目標表示を抑制したレーダ装置に関する。
【背景技術】
【0002】
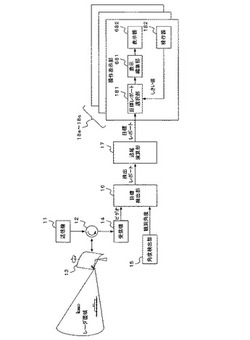
目標を捜索し追尾する従来のレーダ装置の構成の一例を図6に示す。この図6に例示したレーダ装置は、レーダ送信波を発生する送信機11、レーダ送信波をアンテナ13に通過させるとともに、アンテナ13で受信したレーダ受信波を受信機14に通過させるサーキュレータ12、レーダ送信波を空間に放射するとともに、その反射波としてのレーダ受信波を受信するアンテナ13、レーダ受信波に対して増幅や周波数変換、フィルタリング等の受信処理後のビデオ信号を出力する受信機14、ビデオ信号から目標を検出してその観測時刻及び観測距離を取得するとともに、これらに角度検出部15の出力する目標検出時の観測角度等を含めた目標の検出レポートを作成し出力する目標検出部16、検出レポートに基づいて目標の追尾を開始・継続し、目標毎に目標識別番号、平滑距離、平滑角度、観測位置等を含む目標レポートを生成して出力する追尾演算部67、及び目標レポートに基づき目標をシンボル化したレーダ表示画面を表示編集部681にて編集し表示器682にグラフィカルに表示する複数(3個)の表示部68a〜68cから構成されている。そして、対象のレーダ覆域内を所定の周期でスキャンしながらレーダ送信波を放射し、その反射波を受信して目標を検出・捕捉し、新たな目標に対しては追尾を開始・継続することによって対象目標を監視している。
【0003】
ここで、検出した目標に対して自動的に追尾を開始する際には、追尾演算部67において、数スキャンにわたる検出レポートを用いて、例えば、スライディングウィンドウ処理等により真の目標であるか否かが判定される。図7は、このスライディングウィンドウ処理を説明するための図である。一般には、追尾を開始する前に行うスライディングウィンドウ処理においては、ウィンドウ幅を大きくとることにより、クラッタの残留成分等による誤追尾を減らすことができるが、新たな目標がレーダ覆域に入ってから追尾が開始されるまでの応答時間が遅くなることが知られている。観測回数と目標判定確率との関係の一例を図8に例示する。
【0004】
この図8の事例では、スライディングウィンドウ処理におけるウィンドウ幅nと目標有りと判定するためのしきい値kとが2〜5で互いに等しい場合において、それぞれの検出確率が0.9の場合と0.22の場合とを例示したものである。真に存在する目標の場合の検出確率を例えば0.9とし、誤検出による検出確率を例えば0.22とすると、この図7からは、ウィンドウ幅nを小さくするほど追尾開始までの応答時間が短くなる一方、誤追尾を開始する確率も高くなることが読み取れる。従来のレーダ装置においては、装置の運用環境に合うように、このような追尾までの応答時間と誤追尾発生確率のバランスを取って、追尾演算部67におけるスライディングウィンドウ処理のウィンドウ幅nを設定している。なお、スライディングウィンドウ処理については、図7、及び図8を含め、例えば非特許文献1等に詳述されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「Radar Data Processing Vol.1」A.Farina & F.A.Studer, Research Studies Press LTD,1985、P.203 3.6項
【非特許文献2】「Radar Data Processing Vol.1」A.Farina & F.A.Studer, Research Studies Press LTD,1985、P.162 Table3.2
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、目標が覆域内に入ってから自動的に追尾が開始されるまでの応答時間については、種々の速度で移動する目標がある中で、特に高速で飛来する航空機が存在する環境において目標を監視する場合は、その間の飛行距離を考慮してできる限り短時間であることが望まれる。例えば、音速をはるかに超える航空機では、1000m/s程度の速度を有するものも存在するが(例えば、(非特許文献2)参照)、例えばレーダ装置側のスキャン周期が10秒、レーダ覆域の有効距離範囲が60kmの場合には、航空機がレーダ覆域に入ってから1スキャンあたり最大10km飛行し、3スキャンでは追尾開始までに有効距離範囲の最大50%まで飛来することになって、目標監視の観点から不都合を生じるおそれがある。すなわち、上述したウィンドウ幅のnは小さく設定されることが望ましい。
【0007】
一方で、低速で移動する船舶などを監視する場合は、船舶の速度が例えば20m/s程度であるとすると、目標の判定に対してより大きなウィンドウ幅を設定したとしても、例えば5スキャン程度であれば、その応答時間内における目標の移動は100m程度と、わずかである。また、誤追尾の発生については、ウィンドウ幅を小さく設定した場合はその発生確率が上昇するため、高速で飛来する航空機等に対してはその発生を許容するにしても、残留クラッタ成分の多い環境中を低速で移動する船舶等に対しては誤追尾の発生が多発する不都合を生じるおそれがあるので、ウィンドウ幅は誤追尾の発生を許容できる程度に大きく設定されることが望ましい。
【0008】
しかしながら、種々の速度を有する目標を同時に監視する環境においては、このような追尾開始までの応答時間と誤追尾発生確率のバランスを取ってウィンドウ幅を設定するにしても、やはり高速な航空機等を優先させることになり、その場合は低速な船舶等に対しては誤検出や誤追尾の発生が許容範囲を超えて増加していた。その結果、表示部68にはこのような誤追尾による誤まったシンボル表示が増加することになり、監視員の負担の増大を招いていた。
【0009】
本発明の実施形態は、上述の事情を考慮してなされたものであり、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
実施形態のレーダ装置は、対象の覆域をスキャンしながらレーダ波を送信しその反射波を受信するレーダ送受信部と、前記レーダ送受信部からの受信信号に基づき各スキャン毎に目標を検出しその位置情報を含む検出レポートを生成する目標検出部と、複数回にわたる前記スキャンで取得した前記目標の検出レポートを用いてあらかじめ設定された所定のウィンドウ数によるスライディングウィンドウ処理に基づき前記目標の追尾を開始し前記目標の追尾位置情報を含む目標レポートを生成する追尾演算部と、前記追尾演算部からの目標レポートに基づき前記目標をシンボル表示する表示部とを備えたレーダ装置において、前記追尾演算部は、前記目標に対するスライディングウィンドウ処理における今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの時間経過に沿って順次加算計数した相関・連結成功回数を前記目標レポートに含めて生成し、前記表示部は、あらかじめ設定された相関・連結成功回数のしきい値を超えた目標レポートを選択する目標レポート選択部を備え、この目標レポート選択部にて選択された目標レポートに基づき前記目標をシンボル表示することを特徴とする。
【図面の簡単な説明】
【0011】
【図1】一実施形態のレーダ装置の構成の一例を示すブロック図。
【図2】スライディングウィンドウ処理による追尾開始の判定場面の一例をモデル化して示す図。
【図3】目標レポートの構成の一例を示す図。
【図4】相関・連結成功回数のしきい値kdspの差異による、観測回数と目標判定確率との関係の一例を示す図。
【図5】図1に例示したレーダ装置の動作を説明するためのフローチャート。
【図6】従来のレーダ装置の構成の一例を示すブロック図。
【図7】スライディングウィンドウ処理を説明するための説明図。
【図8】スライディングウィンドウ処理におけるウィンドウ幅、観測回数、及び目標判定確率との関係の一例を示す図。
【発明を実施するための形態】
【0012】
以下に、本実施形態のレーダ装置について、図1乃至図5を参照して説明する。なお、以下においては、背景技術の欄で説明した構成部分に相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例】
【0013】
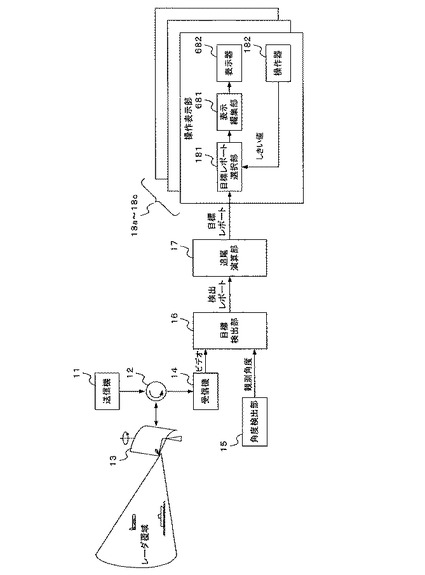
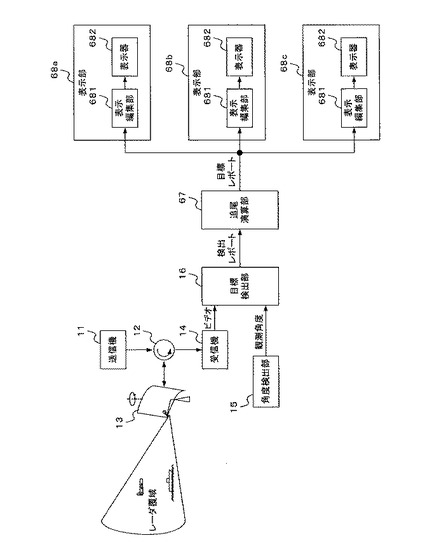
図1は、一実施形態のレーダ装置の構成の一例を示すブロック図である。図1に例示したように、このレーダ装置は、送信機11、サーキュレータ12、アンテナ13、受信機14、角度検出部15、目標検出部16、追尾演算部17、及び複数台(3台)の走査表示部18a〜18cから構成されている。送信機11は、レーダ送信波を発生する。サーキュレータ12は、送信機11からのレーダ送信波をアンテナ13に通過させるとともに、アンテナ13で受信した受信波を受信機14に通過させる。アンテナ13は、レーダ送信波を空間に放射するとともに、その反射波としてのレーダ受信波を受信する。受信機14は、アンテナ13からのレーダ受信波をサーキュレータ12経由で受けとり、このレーダ受信波に対して増幅、周波数変換、フィルタリング等の受信処理を施し、ビデオ信号にして出力する。角度検出部15は、目標の観測角度を出力する。目標検出部16は、受信機14からのビデオ信号から目標の有無を検出するとともに、目標を検出した場合は、その観測時刻、観測距離、及び観測角度等を含む目標の検出レポートを作成し出力する。
【0014】
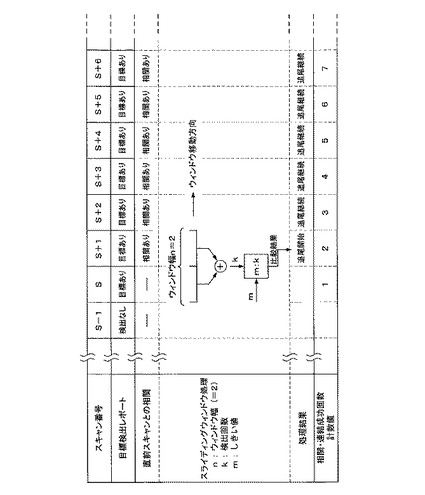
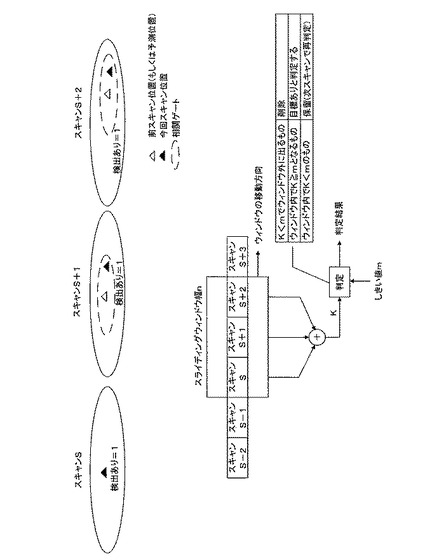
追尾演算部17は、あらかじめ設定されたウィンドウ幅に相当する複数スキャンにわたる目標検出部16からの目標の検出レポートをスライディングウィンドウ処理して目標の追尾の開始を判定するとともに、このスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として目標レポートに含めて送出する。この追尾演算部17でのスライディングウィンドウ処理による追尾開始の判定場面をモデル化して図2に例示する。図2の事例では、スライディングウィンドウ処理におけるウィンドウ幅n、及び検出回数のしきい値mはいずれも2とした場合を例示している。スキャン番号Sで目標有りとの検出レポートを受け、次のスキャン番号S+1で直前スキャンSとの相関がとれ、追尾を開始する。これとあわせて、相関・連結成功回数は、目標を検出したスキャン番号Sで初期値の1が書き込まれ、その後相関の取れたスキャンにおいて順次1ずつカウントアップされる。
【0015】
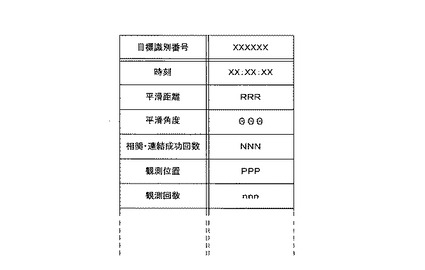
また、追尾演算部17から出力される目標レポートの一例を図3に例示する。図3の事例では、追尾が開始された目標毎に付された識別番号、平滑距離、平滑角度等に加え、上記の相関・連結成功回数を含んだ形に構成されている。
【0016】
操作表示部18a〜18cはいずれも同一に構成され、追尾演算部17から送られてくる目標レポートの中から、あらかじめ設定されたしきい値kdspを超えた相関・連結成功回数を有する目標レポートを選択してこれを表示の対象とするとともに、この選択された目標レポートに基づいて目標を画面上にシンボル表示する。ここに、それぞれの操作表示部18は、目標レポート選択部181、操作器182、表示編集部681、及び表示器682を有している。目標レポート選択部181は、追尾演算部17から送られてくる目標レポートの中から、相関・連結成功回数があらかじめ設定されたしきい値をkdsp超えた目標レポートを選択する。操作器182は、操作員等により入力される相関・連結成功回数のしきい値kdspを受けつけて目標レポート選択部182に転送する。本実施例においては、この操作器182から転送されたしきい値kdspが目標レポート選択部181に設定されるものとしている。表示編集部681は、目標レポート選択部181で選択された目標レポートに基づき目標をシンボル表示するためのレーダ画面を編集する。表示器682は、この編集されたレーダ画面を表示する。
【0017】
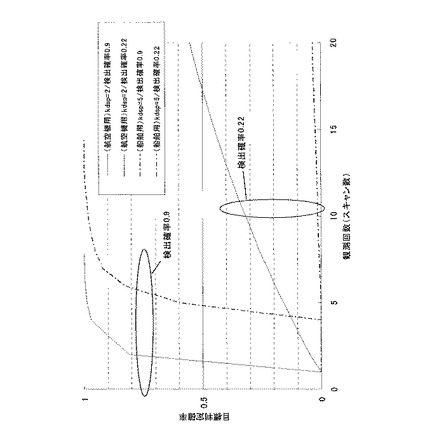
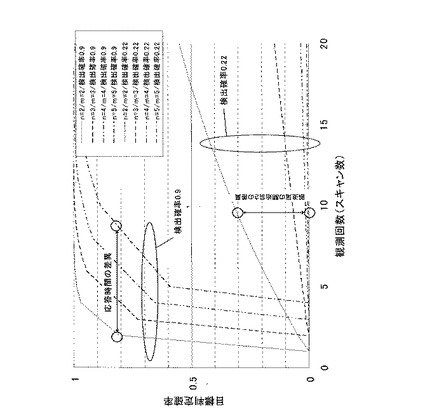
ここで、操作器182により設定される相関・連結成功回数のしきい値kdspの差異による、観測回数と目標判定確率との関係の一例を図4に例示する。
【0018】
この図4の事例では、追尾演算部17でのスライディングウィンドウ処理(図2)においては、ウィンドウ幅n及び検出回数のしきい値mをそれぞれ2とし、操作表示部18の目標レポート選択部181に設定される相関・連結成功回数のしきい値kdspは、2及び5の場合をそれぞれ例示している。この図4において、検出確率0.9のプロットを、真の目標の追尾を開始したことによるシンボル表示、また検出確率0.22のプロットを誤追尾によるシンボル表示とすると、しきい値kdspを大きくすることにより、初探知された目標が表示器682に表示されるまでの応答時間は長くなるものの、誤追尾によるシンボル表示は大幅に抑制することができることが読み取れる。すなわち、監視対象に合わせた最適な目標表示条件を設定することができる。従ってこの事例では、しきい値kdsp=2は、例えば航空機等の高速の目標を、またしきい値kdsp=5は、例えば船舶等の低速な目標をそれぞれ監視する場合に適用することによって、特に厳しいクラッタ環境中にある低速の船舶等の監視に際して誤追尾を大幅に抑制でき、監視員等の負担を軽減することができる。
【0019】
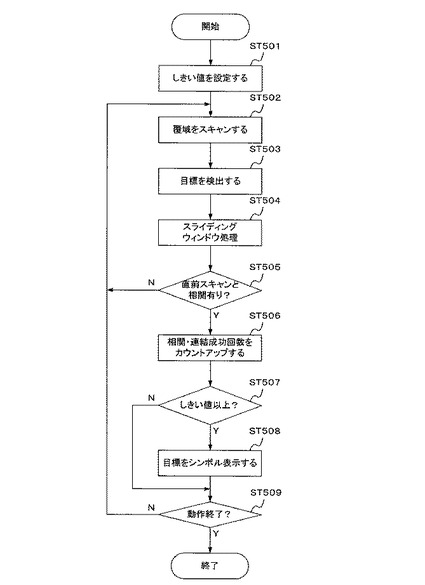
次に、前出の図1乃至図4、ならびに図5のフローチャートを参照して、上述のように構成された本実施形態のレーダ装置の動作について説明する。なお、以下の説明においては、追尾演算部17でのスライディングウィンドウ処理におけるウィンドウ幅nは、例えば高速の航空機等を対象に2とし、操作表示部18内で設定される相関・連結成功回数のしきい値kdspは、例えば2、または5とした場合について説明する。図5は、このレーダ装置の動作を説明するためのフローチャートである。
【0020】
レーダ装置の動作が開始されると、監視員等の入力操作により、まず複数の操作表示部18a〜18cのそれぞれの操作器182から、相関・連結成功回数のしきい値kdspが入力されて目標レポート選択部181に送られ、各表示操作部18a〜18c毎にしきい値kdspが設定される(ST501)。次いで、アンテナ13をレーダ覆域に走査しながら送信機11及び受信機14によりレーダ信号の送受信が繰り返され、その受信信号が受信処理されて順次目標検出部16に送られる(ST502)。目標検出部16では、この受信処理後の信号から目標を検出する。目標が検出されると、各スキャンに対応させて検出レポートが生成され、目標検出部16から追尾演算部17に送出される(ST503)。
【0021】
次いで、追尾演算部17では、目標検出部16から送られてきた目標の検出レポートを用いてスライディングウィンドウ処理を行う。このスライディングウィンドウ処理においては、対象の目標位置に対する直前のスキャンと今回のスキャンとでの相関の有無が判定され、その結果により追尾開始が判定される。図2を参照して、例えば今回のスキャン番号がSとすると、受けとった検出レポートの目標は初探知のものであり、次回のスキャンでの判定のための準備がなされる。また今回のスキャン番号がS+1とすると、直前のスキャン番号Sとの相関がある場合には追尾開始の判定がなされる。また今回のスキャンがS+2とし、同様に直前のスキャンであるS+1との相関があれば、開始された追尾が継続されることになる(ST504)。
【0022】
さらに追尾演算部17においては、目標が検出されたスキャン番号Sで相関・連結成功回数の初期値として1が書き込まれ、その後スキャンの経過に沿って、直前のスキャンとの相関があればこの相関・連結成功回数が1ずつカウントアップされる(ST505)。そして、追尾が開始された目標毎に、図3に例示したように、この相関・連結成功回数を含んだ目標レポートが生成され、複数(3台)設けられた操作表示部18a〜18cに送出される(ST506)。
【0023】
次いで、各操作表示部18a〜18cでは、追尾演算部17からの目標レポートは目標レポート選択部181に送られて、この目標レポート中から相関・連結成功回数が抽出され、ST501の動作ステップで設定されたしきい値kdspと比較される。そして、相関・連結成功回数がしきい値kdsp以上の場合には、この目標レポートは表示対象の目標レポートとして目標レポート選択部181から表示編集部681に送られ、この目標をシンボル表示するためのレーダ画面が編集されて表示器682上に表示される。一方、相関・連結成功回数がしきい値kdsp未満の場合には表示の対象にはならず、目標レポートは後段には送られない(ST507)。
【0024】
ここで、例えばST501の動作ステップにおいて設定されたしきい値kdspが、kdsp=2の場合は、図2の事例では、スキャン番号Sで検出された目標は、スキャン番号S+1に対応した処理タイミングで追尾開始が判定されるとともに、表示器682にシンボル表示され、短い応答時間を確保している。また、しきい値kdspとしてkdsp=5が設定された場合には、同様にスキャン番号S+1に対応した処理タイミングで追尾開始の判定がなされるが、表示器682にシンボル表示されるのは、さらに相関・連結成功回数がカウントアップされて5となった、スキャン番号S+4に対応した処理タイミングとなる。すなわち、図4を参照して判断されるように、目標の誤追尾開始によるシンボル表示を抑制することができる(ST508)。そして、この後は、動作終了が指示されるまで覆域内のスキャンが継続され、上述した動作ステップが繰り返される(ST509)。
【0025】
以上説明したように、本実施例のレーダ装置においては、目標検出部16で検出した各スキャン毎の目標の検出レポートに対して追尾演算部17において所定のウィンドウ幅のスライディングウィンドウ処理を実施して目標の追尾の開始及び継続を判定するとともに、このスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて後段の操作表示部18に送出している。一方複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対しての、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、追尾対象として送られてきた目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示している。
【0026】
これにより、追尾演算部17において、誤追尾の確率が十分に低減されないまま短い応答時間で追尾開始の判定がなされても、操作表示部18a〜18cのそれぞれにおいて、しきい値kdspを監視対象に合わせた目標表示条件に設定し、誤追尾が開始された目標の表示を抑えることができる。すなわち、例えば船舶等の低速な目標を監視対象にする場合には、上記事例ではしきい値kdspを例えばkdsp=5に設定することにより、誤追尾による目標のシンボル表示を大幅に抑えることができる。従って、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制することができ、監視員等の負担も軽減することができる。
【0027】
なお、本実施形態は、上述したそのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0028】
11 送信機
12 サーキュレータ
13 アンテナ
14 受信機
15 角度検出部
16 目標検出部
17、67 追尾演算部
18 操作表示部
68 表示部
181 目標レポート選択部
182 操作器
681 表示編集部
682 表示器
【技術分野】
【0001】
本発明の実施形態は、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、誤追尾による目標表示を抑制したレーダ装置に関する。
【背景技術】
【0002】
目標を捜索し追尾する従来のレーダ装置の構成の一例を図6に示す。この図6に例示したレーダ装置は、レーダ送信波を発生する送信機11、レーダ送信波をアンテナ13に通過させるとともに、アンテナ13で受信したレーダ受信波を受信機14に通過させるサーキュレータ12、レーダ送信波を空間に放射するとともに、その反射波としてのレーダ受信波を受信するアンテナ13、レーダ受信波に対して増幅や周波数変換、フィルタリング等の受信処理後のビデオ信号を出力する受信機14、ビデオ信号から目標を検出してその観測時刻及び観測距離を取得するとともに、これらに角度検出部15の出力する目標検出時の観測角度等を含めた目標の検出レポートを作成し出力する目標検出部16、検出レポートに基づいて目標の追尾を開始・継続し、目標毎に目標識別番号、平滑距離、平滑角度、観測位置等を含む目標レポートを生成して出力する追尾演算部67、及び目標レポートに基づき目標をシンボル化したレーダ表示画面を表示編集部681にて編集し表示器682にグラフィカルに表示する複数(3個)の表示部68a〜68cから構成されている。そして、対象のレーダ覆域内を所定の周期でスキャンしながらレーダ送信波を放射し、その反射波を受信して目標を検出・捕捉し、新たな目標に対しては追尾を開始・継続することによって対象目標を監視している。
【0003】
ここで、検出した目標に対して自動的に追尾を開始する際には、追尾演算部67において、数スキャンにわたる検出レポートを用いて、例えば、スライディングウィンドウ処理等により真の目標であるか否かが判定される。図7は、このスライディングウィンドウ処理を説明するための図である。一般には、追尾を開始する前に行うスライディングウィンドウ処理においては、ウィンドウ幅を大きくとることにより、クラッタの残留成分等による誤追尾を減らすことができるが、新たな目標がレーダ覆域に入ってから追尾が開始されるまでの応答時間が遅くなることが知られている。観測回数と目標判定確率との関係の一例を図8に例示する。
【0004】
この図8の事例では、スライディングウィンドウ処理におけるウィンドウ幅nと目標有りと判定するためのしきい値kとが2〜5で互いに等しい場合において、それぞれの検出確率が0.9の場合と0.22の場合とを例示したものである。真に存在する目標の場合の検出確率を例えば0.9とし、誤検出による検出確率を例えば0.22とすると、この図7からは、ウィンドウ幅nを小さくするほど追尾開始までの応答時間が短くなる一方、誤追尾を開始する確率も高くなることが読み取れる。従来のレーダ装置においては、装置の運用環境に合うように、このような追尾までの応答時間と誤追尾発生確率のバランスを取って、追尾演算部67におけるスライディングウィンドウ処理のウィンドウ幅nを設定している。なお、スライディングウィンドウ処理については、図7、及び図8を含め、例えば非特許文献1等に詳述されている。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】「Radar Data Processing Vol.1」A.Farina & F.A.Studer, Research Studies Press LTD,1985、P.203 3.6項
【非特許文献2】「Radar Data Processing Vol.1」A.Farina & F.A.Studer, Research Studies Press LTD,1985、P.162 Table3.2
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、目標が覆域内に入ってから自動的に追尾が開始されるまでの応答時間については、種々の速度で移動する目標がある中で、特に高速で飛来する航空機が存在する環境において目標を監視する場合は、その間の飛行距離を考慮してできる限り短時間であることが望まれる。例えば、音速をはるかに超える航空機では、1000m/s程度の速度を有するものも存在するが(例えば、(非特許文献2)参照)、例えばレーダ装置側のスキャン周期が10秒、レーダ覆域の有効距離範囲が60kmの場合には、航空機がレーダ覆域に入ってから1スキャンあたり最大10km飛行し、3スキャンでは追尾開始までに有効距離範囲の最大50%まで飛来することになって、目標監視の観点から不都合を生じるおそれがある。すなわち、上述したウィンドウ幅のnは小さく設定されることが望ましい。
【0007】
一方で、低速で移動する船舶などを監視する場合は、船舶の速度が例えば20m/s程度であるとすると、目標の判定に対してより大きなウィンドウ幅を設定したとしても、例えば5スキャン程度であれば、その応答時間内における目標の移動は100m程度と、わずかである。また、誤追尾の発生については、ウィンドウ幅を小さく設定した場合はその発生確率が上昇するため、高速で飛来する航空機等に対してはその発生を許容するにしても、残留クラッタ成分の多い環境中を低速で移動する船舶等に対しては誤追尾の発生が多発する不都合を生じるおそれがあるので、ウィンドウ幅は誤追尾の発生を許容できる程度に大きく設定されることが望ましい。
【0008】
しかしながら、種々の速度を有する目標を同時に監視する環境においては、このような追尾開始までの応答時間と誤追尾発生確率のバランスを取ってウィンドウ幅を設定するにしても、やはり高速な航空機等を優先させることになり、その場合は低速な船舶等に対しては誤検出や誤追尾の発生が許容範囲を超えて増加していた。その結果、表示部68にはこのような誤追尾による誤まったシンボル表示が増加することになり、監視員の負担の増大を招いていた。
【0009】
本発明の実施形態は、上述の事情を考慮してなされたものであり、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制したレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
実施形態のレーダ装置は、対象の覆域をスキャンしながらレーダ波を送信しその反射波を受信するレーダ送受信部と、前記レーダ送受信部からの受信信号に基づき各スキャン毎に目標を検出しその位置情報を含む検出レポートを生成する目標検出部と、複数回にわたる前記スキャンで取得した前記目標の検出レポートを用いてあらかじめ設定された所定のウィンドウ数によるスライディングウィンドウ処理に基づき前記目標の追尾を開始し前記目標の追尾位置情報を含む目標レポートを生成する追尾演算部と、前記追尾演算部からの目標レポートに基づき前記目標をシンボル表示する表示部とを備えたレーダ装置において、前記追尾演算部は、前記目標に対するスライディングウィンドウ処理における今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの時間経過に沿って順次加算計数した相関・連結成功回数を前記目標レポートに含めて生成し、前記表示部は、あらかじめ設定された相関・連結成功回数のしきい値を超えた目標レポートを選択する目標レポート選択部を備え、この目標レポート選択部にて選択された目標レポートに基づき前記目標をシンボル表示することを特徴とする。
【図面の簡単な説明】
【0011】
【図1】一実施形態のレーダ装置の構成の一例を示すブロック図。
【図2】スライディングウィンドウ処理による追尾開始の判定場面の一例をモデル化して示す図。
【図3】目標レポートの構成の一例を示す図。
【図4】相関・連結成功回数のしきい値kdspの差異による、観測回数と目標判定確率との関係の一例を示す図。
【図5】図1に例示したレーダ装置の動作を説明するためのフローチャート。
【図6】従来のレーダ装置の構成の一例を示すブロック図。
【図7】スライディングウィンドウ処理を説明するための説明図。
【図8】スライディングウィンドウ処理におけるウィンドウ幅、観測回数、及び目標判定確率との関係の一例を示す図。
【発明を実施するための形態】
【0012】
以下に、本実施形態のレーダ装置について、図1乃至図5を参照して説明する。なお、以下においては、背景技術の欄で説明した構成部分に相当する部分には、背景技術の欄で使用した符号と同じ符号を用いて説明する。
【実施例】
【0013】
図1は、一実施形態のレーダ装置の構成の一例を示すブロック図である。図1に例示したように、このレーダ装置は、送信機11、サーキュレータ12、アンテナ13、受信機14、角度検出部15、目標検出部16、追尾演算部17、及び複数台(3台)の走査表示部18a〜18cから構成されている。送信機11は、レーダ送信波を発生する。サーキュレータ12は、送信機11からのレーダ送信波をアンテナ13に通過させるとともに、アンテナ13で受信した受信波を受信機14に通過させる。アンテナ13は、レーダ送信波を空間に放射するとともに、その反射波としてのレーダ受信波を受信する。受信機14は、アンテナ13からのレーダ受信波をサーキュレータ12経由で受けとり、このレーダ受信波に対して増幅、周波数変換、フィルタリング等の受信処理を施し、ビデオ信号にして出力する。角度検出部15は、目標の観測角度を出力する。目標検出部16は、受信機14からのビデオ信号から目標の有無を検出するとともに、目標を検出した場合は、その観測時刻、観測距離、及び観測角度等を含む目標の検出レポートを作成し出力する。
【0014】
追尾演算部17は、あらかじめ設定されたウィンドウ幅に相当する複数スキャンにわたる目標検出部16からの目標の検出レポートをスライディングウィンドウ処理して目標の追尾の開始を判定するとともに、このスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として目標レポートに含めて送出する。この追尾演算部17でのスライディングウィンドウ処理による追尾開始の判定場面をモデル化して図2に例示する。図2の事例では、スライディングウィンドウ処理におけるウィンドウ幅n、及び検出回数のしきい値mはいずれも2とした場合を例示している。スキャン番号Sで目標有りとの検出レポートを受け、次のスキャン番号S+1で直前スキャンSとの相関がとれ、追尾を開始する。これとあわせて、相関・連結成功回数は、目標を検出したスキャン番号Sで初期値の1が書き込まれ、その後相関の取れたスキャンにおいて順次1ずつカウントアップされる。
【0015】
また、追尾演算部17から出力される目標レポートの一例を図3に例示する。図3の事例では、追尾が開始された目標毎に付された識別番号、平滑距離、平滑角度等に加え、上記の相関・連結成功回数を含んだ形に構成されている。
【0016】
操作表示部18a〜18cはいずれも同一に構成され、追尾演算部17から送られてくる目標レポートの中から、あらかじめ設定されたしきい値kdspを超えた相関・連結成功回数を有する目標レポートを選択してこれを表示の対象とするとともに、この選択された目標レポートに基づいて目標を画面上にシンボル表示する。ここに、それぞれの操作表示部18は、目標レポート選択部181、操作器182、表示編集部681、及び表示器682を有している。目標レポート選択部181は、追尾演算部17から送られてくる目標レポートの中から、相関・連結成功回数があらかじめ設定されたしきい値をkdsp超えた目標レポートを選択する。操作器182は、操作員等により入力される相関・連結成功回数のしきい値kdspを受けつけて目標レポート選択部182に転送する。本実施例においては、この操作器182から転送されたしきい値kdspが目標レポート選択部181に設定されるものとしている。表示編集部681は、目標レポート選択部181で選択された目標レポートに基づき目標をシンボル表示するためのレーダ画面を編集する。表示器682は、この編集されたレーダ画面を表示する。
【0017】
ここで、操作器182により設定される相関・連結成功回数のしきい値kdspの差異による、観測回数と目標判定確率との関係の一例を図4に例示する。
【0018】
この図4の事例では、追尾演算部17でのスライディングウィンドウ処理(図2)においては、ウィンドウ幅n及び検出回数のしきい値mをそれぞれ2とし、操作表示部18の目標レポート選択部181に設定される相関・連結成功回数のしきい値kdspは、2及び5の場合をそれぞれ例示している。この図4において、検出確率0.9のプロットを、真の目標の追尾を開始したことによるシンボル表示、また検出確率0.22のプロットを誤追尾によるシンボル表示とすると、しきい値kdspを大きくすることにより、初探知された目標が表示器682に表示されるまでの応答時間は長くなるものの、誤追尾によるシンボル表示は大幅に抑制することができることが読み取れる。すなわち、監視対象に合わせた最適な目標表示条件を設定することができる。従ってこの事例では、しきい値kdsp=2は、例えば航空機等の高速の目標を、またしきい値kdsp=5は、例えば船舶等の低速な目標をそれぞれ監視する場合に適用することによって、特に厳しいクラッタ環境中にある低速の船舶等の監視に際して誤追尾を大幅に抑制でき、監視員等の負担を軽減することができる。
【0019】
次に、前出の図1乃至図4、ならびに図5のフローチャートを参照して、上述のように構成された本実施形態のレーダ装置の動作について説明する。なお、以下の説明においては、追尾演算部17でのスライディングウィンドウ処理におけるウィンドウ幅nは、例えば高速の航空機等を対象に2とし、操作表示部18内で設定される相関・連結成功回数のしきい値kdspは、例えば2、または5とした場合について説明する。図5は、このレーダ装置の動作を説明するためのフローチャートである。
【0020】
レーダ装置の動作が開始されると、監視員等の入力操作により、まず複数の操作表示部18a〜18cのそれぞれの操作器182から、相関・連結成功回数のしきい値kdspが入力されて目標レポート選択部181に送られ、各表示操作部18a〜18c毎にしきい値kdspが設定される(ST501)。次いで、アンテナ13をレーダ覆域に走査しながら送信機11及び受信機14によりレーダ信号の送受信が繰り返され、その受信信号が受信処理されて順次目標検出部16に送られる(ST502)。目標検出部16では、この受信処理後の信号から目標を検出する。目標が検出されると、各スキャンに対応させて検出レポートが生成され、目標検出部16から追尾演算部17に送出される(ST503)。
【0021】
次いで、追尾演算部17では、目標検出部16から送られてきた目標の検出レポートを用いてスライディングウィンドウ処理を行う。このスライディングウィンドウ処理においては、対象の目標位置に対する直前のスキャンと今回のスキャンとでの相関の有無が判定され、その結果により追尾開始が判定される。図2を参照して、例えば今回のスキャン番号がSとすると、受けとった検出レポートの目標は初探知のものであり、次回のスキャンでの判定のための準備がなされる。また今回のスキャン番号がS+1とすると、直前のスキャン番号Sとの相関がある場合には追尾開始の判定がなされる。また今回のスキャンがS+2とし、同様に直前のスキャンであるS+1との相関があれば、開始された追尾が継続されることになる(ST504)。
【0022】
さらに追尾演算部17においては、目標が検出されたスキャン番号Sで相関・連結成功回数の初期値として1が書き込まれ、その後スキャンの経過に沿って、直前のスキャンとの相関があればこの相関・連結成功回数が1ずつカウントアップされる(ST505)。そして、追尾が開始された目標毎に、図3に例示したように、この相関・連結成功回数を含んだ目標レポートが生成され、複数(3台)設けられた操作表示部18a〜18cに送出される(ST506)。
【0023】
次いで、各操作表示部18a〜18cでは、追尾演算部17からの目標レポートは目標レポート選択部181に送られて、この目標レポート中から相関・連結成功回数が抽出され、ST501の動作ステップで設定されたしきい値kdspと比較される。そして、相関・連結成功回数がしきい値kdsp以上の場合には、この目標レポートは表示対象の目標レポートとして目標レポート選択部181から表示編集部681に送られ、この目標をシンボル表示するためのレーダ画面が編集されて表示器682上に表示される。一方、相関・連結成功回数がしきい値kdsp未満の場合には表示の対象にはならず、目標レポートは後段には送られない(ST507)。
【0024】
ここで、例えばST501の動作ステップにおいて設定されたしきい値kdspが、kdsp=2の場合は、図2の事例では、スキャン番号Sで検出された目標は、スキャン番号S+1に対応した処理タイミングで追尾開始が判定されるとともに、表示器682にシンボル表示され、短い応答時間を確保している。また、しきい値kdspとしてkdsp=5が設定された場合には、同様にスキャン番号S+1に対応した処理タイミングで追尾開始の判定がなされるが、表示器682にシンボル表示されるのは、さらに相関・連結成功回数がカウントアップされて5となった、スキャン番号S+4に対応した処理タイミングとなる。すなわち、図4を参照して判断されるように、目標の誤追尾開始によるシンボル表示を抑制することができる(ST508)。そして、この後は、動作終了が指示されるまで覆域内のスキャンが継続され、上述した動作ステップが繰り返される(ST509)。
【0025】
以上説明したように、本実施例のレーダ装置においては、目標検出部16で検出した各スキャン毎の目標の検出レポートに対して追尾演算部17において所定のウィンドウ幅のスライディングウィンドウ処理を実施して目標の追尾の開始及び継続を判定するとともに、このスライディングウィンドウ処理中に行われる、今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの進行に沿ってカウントアップし、このカウント値を相関・連結成功回数として、目標の表示用の追尾情報としての目標レポートに含めて後段の操作表示部18に送出している。一方複数の操作表示部18a〜18cにおいては、この相関・連結成功回数に対しての、監視対象に合わせた最適なしきい値kdspがそれぞれに設定されており、追尾対象として送られてきた目標レポートの中から、このしきい値kdspを超えた相関・連結成功回数を有するものを表示対象の目標レポートとして選択し、その目標を画面上にシンボル表示している。
【0026】
これにより、追尾演算部17において、誤追尾の確率が十分に低減されないまま短い応答時間で追尾開始の判定がなされても、操作表示部18a〜18cのそれぞれにおいて、しきい値kdspを監視対象に合わせた目標表示条件に設定し、誤追尾が開始された目標の表示を抑えることができる。すなわち、例えば船舶等の低速な目標を監視対象にする場合には、上記事例ではしきい値kdspを例えばkdsp=5に設定することにより、誤追尾による目標のシンボル表示を大幅に抑えることができる。従って、航空機と船舶等、速度が大きく異なる目標を同時に監視する際に、自動追尾開始時における誤追尾による目標表示を抑制することができ、監視員等の負担も軽減することができる。
【0027】
なお、本実施形態は、上述したそのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
【符号の説明】
【0028】
11 送信機
12 サーキュレータ
13 アンテナ
14 受信機
15 角度検出部
16 目標検出部
17、67 追尾演算部
18 操作表示部
68 表示部
181 目標レポート選択部
182 操作器
681 表示編集部
682 表示器
【特許請求の範囲】
【請求項1】
対象の覆域をスキャンしながらレーダ波を送信しその反射波を受信するレーダ送受信部と、
前記レーダ送受信部からの受信信号に基づき各スキャン毎に目標を検出しその位置情報を含む検出レポートを生成する目標検出部と、
複数回にわたる前記スキャンで取得した前記目標の検出レポートを用いてあらかじめ設定された所定のウィンドウ数によるスライディングウィンドウ処理に基づき前記目標の追尾を開始し前記目標の追尾位置情報を含む目標レポートを生成する追尾演算部と、
前記追尾演算部からの目標レポートに基づき前記目標をシンボル表示する表示部とを備えたレーダ装置において、
前記追尾演算部は、前記目標に対するスライディングウィンドウ処理における今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの時間経過に沿って順次加算計数した相関・連結成功回数を前記目標レポートに含めて生成し、
前記表示部は、あらかじめ設定された相関・連結成功回数のしきい値を超えた目標レポートを選択する目標レポート選択部を備え、この目標レポート選択部にて選択された目標レポートに基づき前記目標をシンボル表示する
ことを特徴とするレーダ装置。
【請求項2】
さらに前記表示部は、前記目標レポート選択部に設定される相関・連結成功回数のしきい値を受けつけて前記目標レポート選択部に転送する操作器を有することを特徴とする請求項1のレーダ装置。
【請求項1】
対象の覆域をスキャンしながらレーダ波を送信しその反射波を受信するレーダ送受信部と、
前記レーダ送受信部からの受信信号に基づき各スキャン毎に目標を検出しその位置情報を含む検出レポートを生成する目標検出部と、
複数回にわたる前記スキャンで取得した前記目標の検出レポートを用いてあらかじめ設定された所定のウィンドウ数によるスライディングウィンドウ処理に基づき前記目標の追尾を開始し前記目標の追尾位置情報を含む目標レポートを生成する追尾演算部と、
前記追尾演算部からの目標レポートに基づき前記目標をシンボル表示する表示部とを備えたレーダ装置において、
前記追尾演算部は、前記目標に対するスライディングウィンドウ処理における今回のスキャンと直前のスキャンとでの目標の相関の有無の判定において、相関有りと判定された回数をスキャンの時間経過に沿って順次加算計数した相関・連結成功回数を前記目標レポートに含めて生成し、
前記表示部は、あらかじめ設定された相関・連結成功回数のしきい値を超えた目標レポートを選択する目標レポート選択部を備え、この目標レポート選択部にて選択された目標レポートに基づき前記目標をシンボル表示する
ことを特徴とするレーダ装置。
【請求項2】
さらに前記表示部は、前記目標レポート選択部に設定される相関・連結成功回数のしきい値を受けつけて前記目標レポート選択部に転送する操作器を有することを特徴とする請求項1のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−118035(P2012−118035A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−270855(P2010−270855)
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年12月3日(2010.12.3)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]