
レーダ装置
【課題】距離分解能以内に複数のターゲットが存在し、各ターゲットからの反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上する。
【解決手段】レーダ送信部は、所定符号長のパルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナ毎にアンテナ系統処理部を有する。アンテナ系統処理部は、パルス圧縮符号におけるパルス送信レートの2倍のサンプリングレートで、受信信号をデジタルデータに変換し、奇数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第1相関値を演算し、偶数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第2相関値を演算する。レーダ受信部は、各第1相関値及び第2相関値に基づいて、高周波送信信号の距離分解能以内にターゲットが複数存在すると、各ターゲットを分離して検出する高分解能処理部を備える。
【解決手段】レーダ送信部は、所定符号長のパルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナ毎にアンテナ系統処理部を有する。アンテナ系統処理部は、パルス圧縮符号におけるパルス送信レートの2倍のサンプリングレートで、受信信号をデジタルデータに変換し、奇数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第1相関値を演算し、偶数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第2相関値を演算する。レーダ受信部は、各第1相関値及び第2相関値に基づいて、高周波送信信号の距離分解能以内にターゲットが複数存在すると、各ターゲットを分離して検出する高分解能処理部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ターゲットに反射された反射波の信号を受信アンテナにより受信してターゲットを検出するレーダ装置に関する。
【背景技術】
【0002】
レーダ装置は、測定地点から電波を空間に放射し、ターゲットに反射された反射波の信号を受信して、測定地点とターゲットとの距離、方向の少なくとも1つ以上を測定する。特に近年、マイクロ波又はミリ波を含む波長の短い電波を用いて高分解能に測定することで、自動車だけでなく歩行者も含めてターゲットとして検出可能なレーダ装置の開発が進められている。
【0003】
また、レーダ装置は、近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信することがある。特に、近距離に存在するターゲットからの反射波の信号により、レンジサイドローブが生じるので、レンジサイドローブと遠距離に存在するターゲットからの反射波の信号のメインローブとが混在することがある。レーダ装置における遠距離に存在するターゲットの検出に関しては、検出精度が劣化することがある。
【0004】
従って、複数のターゲットに対して高分解能な測定が要求されるレーダ装置には、低いレンジサイドローブレベルとなる自己相関特性(以下、「低レンジサイドローブ特性」という)を有するパルス圧縮符号を用いたパルス波又はパルス変調波の送信が要求される。
【0005】
また、レーダ装置は、測定地点から同じ距離に自動車と歩行者とが存在すると、レーダ反射断面積(RCS: Radar cross section)の異なる自動車と歩行者とからの各反射波の信号が混合された信号を受信することがある。一般に、歩行者のレーダ反射断面積は自動車のレーダ反射断面積に比べると低い。
【0006】
このため、レーダ装置には、たとえ測定地点から同じ距離に自動車と歩行者とが存在していても、自動車だけでなく歩行者からの反射波の信号を適正に受信することが要求される。ターゲットの距離又は種別により、受信信号レベルとなる反射波の信号は変化する。レーダ装置は、様々な受信信号レベルとなる反射波の信号が受信可能な程度に、大きい受信ダイナミックレンジを有することが要求される。
【0007】
従来のレーダ装置の一例として、アンテナを機械的に走査し、又は狭角の指向性ビームを電子的に走査することによって、パルス波又はパルス変調波を送信し、ターゲットから反射された反射波を受信するものがある。
【0008】
一例のレーダ装置では、単一のアンテナにより電波を送受信するため、ターゲットの検出におけるアンテナの走査時間がかかる。このため、高速移動しているターゲットを検出するには、高分解能な測定が要求される分、多くの走査が必要となり、ターゲットの移動に追従して検出することが難しくなる。
【0009】
一方、従来のレーダ装置の他の一例として、ターゲットから反射された反射波の信号を複数のアンテナにより受信し、受信した各信号の位相を測定することで、アンテナごとのビームの指向性よりも高い分解能を用いて到来角を推定するものがある。
【0010】
他の一例のレーダ装置によれば、単一のアンテナを用いるレーダ装置に比べて、走査間隔を間引いて信号処理することで到来角の推定が可能であり、ターゲットの検出精度を向上することができる。また、ターゲットが高速移動しても、ターゲットの移動に追従して到来角を推定することができる。
【0011】
ここで、パルス幅Tpのパルス圧縮レーダにおける距離分解能ΔRは、一般的に、数式(1)によって示されることが知られている。パラメータCは、光速である。
【0012】
【数1】

【0013】
図22は、距離分解能ΔR内にパルス圧縮レーダからの角度方向が異なるターゲットが複数存在する方向推定結果の一例を示す説明図である。同図(a)は、複数のアンテナ(アレーアンテナ)を用いたパルス圧縮レーダと複数のターゲットとの配置関係を示す説明図である。同図(b)は、ターゲットAのみが存在する到来方向θに対する受信電力推定値を示す説明図である。同図(c)は、ターゲットA及びターゲットBが存在する到来方向θに対する受信電力推定値を示す説明図である。
【0014】
図22に示す様に、複数のアンテナを用いたパルス圧縮レーダが、パルス圧縮レーダの距離分解能ΔR以内に存在する複数のターゲットを測定すると、ターゲットの測距性能及び測角性能には、次に示す様な課題がある。
【0015】
測距性能において、複数のターゲットは、パルス圧縮レーダからの同一のレンジビン内に存在する。パルス圧縮レーダは、パルス圧縮処理において、各ターゲットからの反射波の信号が混合された信号を出力する。これにより、各ターゲットを分離して検出することが困難となる。
【0016】
測角性能において、複数のアンテナのビーム幅内程度に近接する方向に複数のターゲットが存在するので、複数のターゲットからの反射波の信号の相関性が高くなる。このため、各反射波の信号がベクトル合成された方向成分が出力される。これにより、各ターゲットを分離して検出することが困難となる。また、複数の各ターゲットに対する方向推定値が複数の各ターゲットの中間的な到来方向を示すことがある。この場合、方向推定精度が大きく劣化することがある。
【0017】
この様な課題に対し、高い相関性を有する複数のターゲットからの反射波の信号を信号分離し、各信号から信号到来方向を測角演算するものとして、例えば特許文献1が知られている。特許文献1のスーパーレゾリューションアンテナは、複数の素子アンテナにより受信信号をフーリエ変換し、フーリエ変換により生成されたドップラ周波数に応じたフィルタバンク毎の信号成分を重み付ける。更に、同スーパーレゾリューションアンテナは、重み付けされた信号成分から、所望のフィルタバンク成分のみを抽出し、抽出された素子アンテナの信号成分からターゲットの信号到来方向を推定する。
【0018】
これにより、距離分解能内に複数のターゲットが存在し、各ターゲットの相関性が高く、各ターゲットのドップラ周波数が十分に異なれば、各ターゲットからの受信信号を分離し、各ターゲットの到来方向を推定することができる。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2003−194919号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
しかしながら、特許文献1においては、重み付けされた信号成分をフィルタバンクにより抽出可能な程に、複数のターゲットからの各反射波の信号のドップラ周波数が異なることが必要となる。従って、距離分解能ΔR内にドップラ周波数がほぼ同一となる様な複数のターゲットからの各反射波の信号が存在すると、特許文献1に示すスーパーレゾリューションアンテナでは、複数のターゲットを分離して検出することが困難となる。
【0021】
本発明は、上述従来の事情に鑑みてなされたもので、距離分解能以内に複数のターゲットが存在し、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向及び距離の推定精度を向上するために、各ターゲットを分離して検出するレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0022】
本発明は、上述したレーダ装置であって、パルス圧縮符号を高周波送信信号に変換し、前記高周波送信信号を送信アンテナから送信するレーダ送信部と、ターゲットにより反射された前記高周波送信信号である反射波の信号を用いてターゲットまでの到来時間及び到来方向を、前記パルス圧縮符号におけるパルス送信レートに対しN(整数)倍のサンプリングレートを用いて、推定するレーダ受信部と、を含み、前記レーダ受信部は、受信信号と前記パルス圧縮符号との相関値を出力する複数のアンテナ系統処理部と、前記複数のアンテナ系統処理部の各出力を基に、個別に前記ターゲットの到来時間及び到来方向を推定するN個の到来時間方向推定部と、前記N個の到来時間方向推定部での各推定結果に基づいて、前記高周波送信信号の距離分解能以内に存在する複数の前記ターゲットを、各ターゲットを分離して検出する高分解能処理部と、を含み、前記複数のアンテナ系統処理部は、それぞれ、前記反射波の信号を受信する受信アンテナと、前記受信された信号をベースバンドの受信信号に変換する受信RF部と、前記変換された受信信号を、前記N(整数)倍のサンプリングレートを用いてデジタルデータに変換するA/D変換部と、1/Nサンプルタイミング毎に前記変換された受信信号のデジタルデータと、前記送信パルス圧縮符号と、の相関値を演算するN個の相関値演算部と、を有する。
【発明の効果】
【0023】
本発明によれば、距離分解能以内に複数のターゲットが存在し、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向及び距離の推定精度を向上するために、各ターゲットを分離して検出することができる。
【図面の簡単な説明】
【0024】
【図1】相補符号の性質を説明する説明図、(a)一方の相補符号系列の自己相関演算結果を示す説明図、(b)他方の相補符号系列の自己相関演算結果を示す説明図、(c)2つの相補符号系列の自己相関演算結果の加算値を示す説明図
【図2】受信時のオーバーサンプルに基づく自己相関特性を説明する説明図、(a)送信される相補符号を用いたパルス圧縮符号のパルス幅Tpに対し、受信信号y(t)に対し2倍のサンプリングレートを用いてオーバーサンプルした自己相関特性を説明する説明図、(b)受信時に2倍のオーバーサンプルした結果のうちの奇数の離散サンプル値について自己相関特性を説明する説明図、(c)受信時に2倍のオーバーサンプルした結果のうちの偶数の離散サンプル値について自己相関特性を説明する説明図
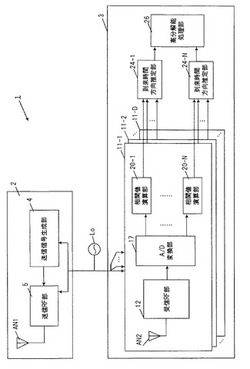
【図3】第1の実施形態のレーダ装置の内部構成を簡略に示すブロック図
【図4】第1の実施形態のレーダ装置の内部構成を詳細に示すブロック図
【図5】高周波送信信号の送信区間と送信周期との関係を示す説明図
【図6】送信信号生成部の他の内部構成を詳細に示すブロック図
【図7】高周波送信信号の送信区間と送信周期と測定範囲との関係を示す説明図
【図8】高分解能処理部の内部構成を詳細に示すブロック図
【図9】推定結果と測定時間との関係を示す説明図
【図10】一致判定範囲と推定結果との関係を示す説明図
【図11】一致判定範囲の3つに分割された各ブロックの構成を示した説明図、(a)一致判定範囲に含まれる推定結果数が6つである構成を示した説明図、(b)一致判定範囲に含まれる推定結果数が8つである構成の一例を示した説明図、(c)一致判定範囲に含まれる推定結果数が8つである構成の他の一例を示した説明図
【図12】高分解能処理部の動作概要を説明する説明図、(a)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図、(b)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図、(c)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図
【図13】高分解能処理部の動作を説明するフローチャート
【図14】高分解能処理部の動作を説明するフローチャート
【図15】高分解能処理部の推定結果を模式的に示した説明図、(a)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅1.5Tpとした説明図、(b)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図、(c)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図、(d)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図
【図16】第1の実施形態の変形例1のレーダ装置の高分解能処理部の推定結果を模式的に示した説明図
【図17】第1の実施形態の変形例2のレーダ装置の内部構成を詳細に示すブロック図
【図18】第1の実施形態の変形例2のレーダ装置の動作に関するタイミングチャート
【図19】第1の実施形態の変形例3のレーダ装置のレーダ受信部における第1アンテナ系統処理部の内部構成を詳細に示すブロック図
【図20】第1の実施形態の変形例3のレーダ装置のレーダ受信部における第1アンテナ系統処理部における各A/D変換部の動作に関するタイミングチャート
【図21】第1の実施形態の変形例4のレーダ装置のレーダ受信部の内部構成を詳細に示すブロック図
【図22】距離分解能ΔR内にパルス圧縮レーダからの角度方向が異なるターゲットが複数存在する方向推定結果の一例を示す説明図、(a)複数のアンテナ(アレーアンテナ)を用いたパルス圧縮レーダと複数のターゲットとの配置関係を示す説明図、(b)ターゲットAのみが存在する到来方向θに対する受信電力推定値を示す説明図、(c)ターゲットA及びターゲットBが存在する到来方向θに対する受信電力推定値を示す説明図
【発明を実施するための形態】
【0025】
本発明に係るレーダ装置の各実施形態を説明する前に、以下、後述の各実施形態の前提となる技術内容として、パルス圧縮処理、相補符号及び受信時のオーバーサンプルに基づく自己相関特性に関してそれぞれ簡単に説明する。
【0026】
(パルス圧縮処理)
先ず、パルス圧縮処理に関して説明する。例えば、上述した低レンジサイドローブ特性を有するパルス波又はパルス変調波として、Barker符号、M系列符号、相補符号の少なくとも1つを含むパルス圧縮符号を用いて高周波のレーダ送信信号を送信するパルス圧縮レーダが知られている。
【0027】
パルス圧縮とは、レーダ装置がパルス信号をパルス変調又は位相変調してパルス幅の広い信号(パルス圧縮符号)を用いて送信し、反射波の受信後の信号処理において受信信号を復調してパルス幅の狭い信号に変換(圧縮)して相関値を演算することである。このパルス圧縮によれば、受信電力を等価的に高め、ターゲットの探知距離を増大することができ、更に、探知距離に対する距離推定精度を向上することができる。
【0028】
(相補符号)
次に、相補符号に関して説明する。相補符号は、複数例えば2つの相補符号系列(an、bn)を用いて構成される符号である。相補符号は、一方の相補符号系列anと他方の相補符号系列bnの各自己相関演算結果において、遅延時間τ[秒]を一致させて各自己相関演算結果を加算することで、レンジサイドローブがゼロとなる性質を有する。なお、パラメータnはn=1,2,…,Lである。パラメータLは、符号系列長又は単に符号長を示す。
【0029】
相補符号の生成方法は、例えば下記参考非特許文献1に開示されている。
(参考非特許文献1)BUDISIN, S. Z,「NEW COMPLEMENTARY PAIRS OF SEQUENCES」,Electron. Lett., 26,(13), pp.881−883(1990)
【0030】
この様な相補符号の性質に関して、図1を参照して説明する。図1は、相補符号の性質を説明する説明図である。同図(a)は、一方の相補符号系列anの自己相関値演算結果を示す説明図である。同図(b)は、他方の相補符号系列bnの自己相関値演算結果を示す説明図である。同図(c)は、2つの相補符号系列(an,bn)の自己相関値演算結果の加算値を示す説明図である。なお、図1において用いた相補符号の符号長Lは128である。
【0031】
相補符号系列(an,bn)のうち一方の相補符号系列anの自己相関値演算結果は、数式(2)に従って演算される。他方の相補符号系列bnの自己相関値演算結果は、数式(3)に従って演算される。なお、パラメータRは自己相関値演算結果を示す。但し、n>L又はn<1では、相補符号系列an,bnはゼロとする(すなわち、n>L又はn<1において、an=0、bn=0)。なお、アスタリスク*は複素共役演算子を示す。
【0032】
【数2】
【0033】
【数3】
【0034】
数式(2)に従って演算された相補符号系列anの自己相関値演算結果Raa(τ)は、図1(a)に示す様に、遅延時間(あるいはシフト時間)τがゼロであるとピークが発生し、遅延時間τがゼロ以外では、レンジサイドローブが存在する。同様に、数式(3)に従って演算された相補符号系列bnの自己相関値演算結果Rbb(τ)は、図1(b)に示す様に、遅延時間τがゼロであるとピークが発生し、遅延時間τがゼロ以外では、レンジサイドローブが存在する。
【0035】
これらの自己相関値演算結果(Raa(τ),Rbb(τ))の加算値は、図1(c)に示す様に、遅延時間τがゼロのときにピークが発生し、遅延時間τがゼロ以外ではレンジサイドローブが存在せずにゼロになる。以下、遅延時間τがゼロであると発生するピークを「メインローブ」という。この関係を数式(4)に示す。なお、図1(a)〜(c)の横軸は自己相関値演算における遅延時間(τ)を示し、縦軸は演算された自己相関値演算結果を示す。
【0036】
【数4】
【0037】
近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信するには、一般的に、パルス圧縮された符号の符号長が長いほど、所要の受信ダイナミックレンジが大きくなることが知られている。
【0038】
相補符号では、上述した自己相関特性から、より短い符号長によってピークサイドローブレベルを低減できる。このため、短い符号長を用いる相補符号では、近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信しても、受信ダイナミックレンジを低減することができる。
【0039】
また、符号長LのBarker符号、M系列符号を用いることで、ピークサイドローブ比は20log10(1/L)[dB]によって与えられ、符号長Lを長くすることで、優れた低レンジサイドローブ特性が得られる。
【0040】
(受信時のオーバーサンプルに基づく自己相関特性)
次に、受信時のオーバーサンプル(所定倍のサンプリングレートによるサンプリング)に基づく自己相関特性に関して図2を参照して説明する。図2は、受信時のオーバーサンプルに基づく自己相関特性を説明する説明図である。なお、以下の説明において、パラメータTp[秒]は、相補符号を用いたパルス圧縮符号の送信時におけるパルス(送信時間)幅、単にパルス幅を示す。
【0041】
同図(a)は、送信される相補符号を用いたパルス圧縮符号(送信符号)のパルス幅Tpに対し、受信信号y(t)に対し2倍のサンプリングレート(=2/Tp)を用いてオーバーサンプルした自己相関特性を説明する説明図である。
【0042】
自己相関演算は、数式(5)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y((kTp/2)+t0)と、送信した符号長Lの相補符号系列anをパルス幅に対し2倍のサンプリングレートでサンプルした信号aasとの相関演算となる。ここで、パラメータS=1,…,2Lであり、aa2n−1=an、aa2n=anである。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0043】
【数5】
【0044】
同図(b)は、受信時に2倍のオーバーサンプルした結果のうちの奇数の離散サンプル値について自己相関特性を説明する説明図である。
【0045】
自己相関演算は、数式(6)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y(kTp/2+t0)のうちの奇数の離散サンプル値と、送信した符号長Lの相補符号系列anをパルス幅に対し1倍のサンプリングレートでサンプルした信号anと、の相関演算となる。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0046】
【数6】
【0047】
同図(c)は、受信時に2倍のオーバーサンプルした結果のうちの偶数の離散サンプル値についての自己相関特性を説明する説明図である。
【0048】
自己相関演算は、数式(7)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y(kTp/2+t0)のうちの偶数の離散サンプル値と、送信した符号長Lの相補符号系列anをパルス幅に対し1倍のサンプリングレートでサンプルした信号anと、の相関演算となる。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0049】
【数7】
【0050】
図2において、ターゲットからの反射波の信号の到来タイミングが、受信時のサンプルタイミングと一致する。隣接する離散時間、即ちサンプルタイミングがTp/2となり、図2(a)に示す様に、自己相関値がゼロとならないサンプルタイミングが3つ現れる。以下、図2(a)に示す様に、隣接するサンプルタイミングにおいて自己相関値がゼロとならない範囲を「相関広がり範囲」と定義する。
【0051】
従って、図2(a)に示す様に、受信時に所定倍(例えば、パルス幅Tpに対し、2倍のサンプリングレート)によるオーバーサンプルリングにより、自己相関値のピークの前後に自己相関値がゼロとならないサンプルタイミングが存在する。即ち、図2(a)においては、自己相関値のピーク周辺にレンジサイドローブが発生したと見なすことができる。
【0052】
自己相関値のピークが得られる時間から遅延時間±Tp/2の受信時の離散サンプル値の影響を受けることになる。レーダ装置の距離分解能ΔR以内の距離であるΔR/2に複数のターゲットが存在すると、各ターゲットにより反射された反射波の信号が一部遅れて受信され、上記のレンジサイドローブにより各ターゲットの自己相関値が加算され、複数のターゲットに対する測角推定性能が劣化することになる。
【0053】
一方、図2(b)には、ターゲットからの反射波の信号の到来タイミングが受信時のサンプルタイミングと一致した自己相関特性が示されている。図2(a)に示す自己相関演算結果とは異なり、隣接する離散時間、即ちサンプルタイミングがTpであると、図2(b)に示す様に、自己相関値がゼロとならないサンプルタイミングは1つだけ存在する。
【0054】
従って、図2(b)の自己相関演算結果では、実際には2倍のサンプリングレートを用いてオーバーサンプルしていても、遅延時間±Tp/2の受信時の離散サンプル値の影響を受けることにならない。レーダ装置の距離分解能ΔR以内に複数のターゲットが存在しても、各ターゲットにより反射された反射波の信号が一部遅れて受信されるが、複数のターゲットに対する測角推定性能が劣化することにならない。
【0055】
また、図2(c)には、ターゲットからの反射波の信号の到来タイミングが受信時のサンプルタイミングと一致しない自己相関特性が示されている。図2(c)に示されたサンプルタイミングと図2(b)に示されたサンプルタイミングとは、離散時間Tp/2ほどずれている。
【0056】
ここで、図2(b)に示された奇数の離散サンプル値のサンプルタイミングと、ターゲットにより反射された反射波の信号の到来タイミングとが一致するとする。図2(c)に示す様に、図2(b)に示す自己相関演算結果とは異なり、隣接する離散時間Tp離れたサンプルタイミングにおいて自己相関値がゼロとならないサンプルタイミングは2つ存在する。
【0057】
従って、図2(c)の自己相関演算結果では、遅延時間±Tp/2の受信時のサンプル値の影響を受けることになる。レーダ装置の距離分解能ΔR以内の距離であるΔR/2において複数のターゲットが存在するため、上記のレンジサイドローブにより各ターゲットの自己相関値が加算され、各ターゲットにより反射された反射波の信号が一部遅れて受信され、複数のターゲットに対する測角推定性能が劣化することになる。
【0058】
上述した説明は、図2(b)に示す受信時のサンプルタイミングとターゲットからの反射波の信号の到来タイミングとが一致し、更に、図2(c)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致しないことを前提としている。
【0059】
反対に、図2(c)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致し、更に図2(b)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致しないと想定する。
【0060】
この場合では、図2(b)に示す自己相関演算結果では遅延時間±Tp/2の受信時のサンプル値の影響を受け、図2(c)に示す自己相関演算結果では遅延時間±Tp/2の受信時のサンプル値の影響を受けない。
【0061】
(本発明の各実施形態)
次に、本発明の実施形態について、図面を参照して説明する。本発明に係るレーダ装置は、図2(b)及び図2(c)に示した様に、送信される相補符号を用いたパルス圧縮符号(送信符号)のパルス幅Tpに対し、受信時に例えば2倍のオーバーサンプルした相関値特性(相関値演算結果)を用いる。更に、本発明に係るレーダ装置は、レーダ装置の距離分解能以内に複数のターゲットが存在しても、相関値演算結果に基づいて各ターゲットからの反射波の信号を分離することで、各ターゲットを検出する。
【0062】
また、以下の説明において、本発明に係るレーダ装置は、ターゲットからの反射波の信号を受信する複数の受信アンテナを有する。例えば4つの受信アンテナ(アレーアンテナ)を有する構成を例に示すがこれに限定されない。
【0063】
〔第1の実施形態〕
第1の実施形態のレーダ装置1の構成及び動作について、図3〜図14を参照して説明する。図3は、第1の実施形態のレーダ装置の内部構成を簡略に示すブロック図である。図4は、第1の実施形態のレーダ装置1の内部構成を詳細に示すブロック図である。図5は、高周波送信信号の送信区間Twと送信周期Trとの関係を示す説明図である。図6は、送信信号生成部4rの他の内部構成を詳細に示すブロック図である。
【0064】
図7は、高周波送信信号の送信区間Twと送信周期Trと測定範囲との関係を示す説明図である。図8は、高分解能処理部26の内部構成を詳細に示すブロック図である。図9は、推定結果DOUTp(q,m)と離散時刻(p,q)との関係を示す説明図である。
【0065】
図10は、一致判定範囲と推定結果DOUTp(q,m)との関係を示す説明図である。図11は、一致判定範囲の3つに分割された各ブロックの構成を示した説明図である。同図(a)は、一致判定範囲に含まれる推定結果数が6つである構成を示した説明図である。同図(b)は、一致判定範囲に含まれる推定結果数が8つである構成の一例を示した説明図である。同図(c)は、一致判定範囲に含まれる推定結果数が8つである構成の他の一例を示した説明図である。
【0066】
図12は、高分解能処理部26の動作概要を説明する説明図である。同図(a)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図である。同図(b)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図である。同図(c)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図である。
【0067】
図13及び図14は、高分解能処理部26の動作を説明するフローチャートである。
【0068】
第1の実施形態のレーダ装置1は、レーダ送信部2により生成された高周波送信信号を送信アンテナAN1から送信(発射)する。レーダ装置1は、送信された高周波送信信号がターゲットにより反射された反射波の信号を、例えば図4に示す様な4つの受信アンテナAN2a〜AN2d(不図示、以下同様)により受信する。レーダ装置1は、各受信アンテナAN2a〜AN2dにより受信された信号を信号処理することで、ターゲットの有無を検出する。
【0069】
なお、ターゲットはレーダ装置1が検出する対象の物体であり、例えば自動車又は人を含み、以下の各実施形態においても同様である。
【0070】
先ず、レーダ装置1の各部の構成について簡略に説明する。
【0071】
レーダ装置1は、図3に示す様に、レーダ送信部2及びレーダ受信部3を備える。レーダ送信部2は、送信信号生成部4、及び、送信アンテナAN1と接続される送信RF部5を有する。なお、レーダ送信部2及びレーダ受信部3は、共に基準信号発振器Loに接続され、基準信号発振器Loから信号が供給され、レーダ送信部2及びレーダ受信部3の処理の同期が揃うようになっている。
【0072】
レーダ受信部3は、D個のアンテナ系統処理部11−1〜11−D、N個の到来時間方向推定部24−1〜24−N、及び高分解能処理部26を有する。パラメータD、パラメータNは、共に2以上の整数である。各アンテナ系統処理部は同様の構成を有し、以下の説明においては、アンテナ系統処理部11−1を例示して説明する。
【0073】
アンテナ系統処理部11−1は、受信アンテナAN2と接続される受信RF部12、A/D変換部17、N個の相関値演算部20−1〜20−Nを少なくとも有する。
【0074】
(レーダ送信部)
次に、レーダ送信部2の各部の構成について詳細に説明する。以下、レーダ送信部2の各部の構成について図4を参照して説明する。
【0075】
レーダ送信部2は、図4に示す様に、送信信号生成部4、及び、送信アンテナAN1が接続された送信RF部5を備える。
【0076】
送信信号生成部4は、図4に示す様に、符号生成部6、変調部7、及びLPF(Low Pass Filter)8を備える。なお、図4では、送信信号生成部4はLPF8を含む様に構成されているが、LPF8は、送信信号生成部4と独立してレーダ送信部2の中に構成されても良い。
【0077】
送信RF部5は、図4に示す様に、周波数変換部9、及び増幅器10を備える。
【0078】
次に、レーダ送信部2の各部の動作について詳細に説明する。
【0079】
送信信号生成部4は、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。送信信号生成部4の各部は、生成された信号に基づいて動作する。
【0080】
送信信号生成部4は、符号長Lの符号系列anを変調し、数式(8)に示すベースバンドの送信信号r(k、M)(パルス圧縮符号とも言う)を周期的に生成する。ここで、パラメータn=1,・・・,Lであり、パラメータLは、符号系列anの符号長を表す。パラメータjは、j2=−1を満たす虚数単位である。パラメータkは、k=1〜(Nr+Nu)を満たす離散時刻である。離散時刻kの範囲は、後述の各実施形態においても同様である。
【0081】
数式(8)に示されたベースバンドの送信信号r(k、M)は、第M番目の送信周期Trの離散時刻kにおける送信信号を示し、同相信号成分Ir(k、M)と、虚数単位jが乗算された直交信号成分Qr(k、M)との加算結果で示される。
【0082】
【数8】
【0083】
また、送信信号生成部4により生成される送信信号は、連続的な信号ではない。図5に示す様に、例えば各送信周期Trの送信区間Tw[秒]では、符号長Lの符号系列anに対して、1つのパルス符号あたりNo[個]のサンプルが存在する。従って、送信区間Twにおいては、Nr(=No×L)のサンプルが含まれる。また、各送信周期Trの非送信区間(Tr−Tw)[秒]では、ベースバンドの送信信号としてNu[個]のサンプルが存在する。
【0084】
符号生成部6は、送信周期Tr毎に、符号長Lの符号系列anのパルス圧縮用の送信符号を生成する。この送信符号は、例えば、上述した相補符号のペアを構成する符号系列、Barker符号系列又はM系列符号の少なくとも1つを含む符号であることが好ましい。
【0085】
符号生成部6は、生成された符号系列anの送信符号を変調部7に出力する。以下、符号系列anの送信符号を、便宜的に送信符号anと記載する。
【0086】
更に、符号生成部6は、或る送信周期Trにおいて、送信符号anとして相補符号のペアを生成するには、2つの送信周期を用いて、各送信周期毎に交互にペアとなる符号Pn,Qnをそれぞれ生成する。すなわち、第M番目の送信周期(Tr)において、パルス圧縮符号an(M)として符号Pnを送信し、続く第(M+1)番目の送信周期(Tr)ではパルス圧縮符号an(M+1)として、符号Qnを送信する。これ以後、第(M+2)番目以降の送信周期では、第M番目の送信周期及び第(M+1)の2つの送信周期を一つの単位として、同様に、繰り返し符号Pn,Qnを生成する。
【0087】
変調部7は、符号生成部6により出力された送信符号anを入力する。変調部7は、入力された送信符号anをパルス変調することで、数式(8)に示されるベースバンドの送信信号r(k,M)を生成する。なお、パルス変調とは、振幅変調、ASK(Amplitude Shift Keying))又は位相変調(PSK(Phase Shift Keying)である。また、変調部7は、LPF8を介して、生成された送信信号r(k,M)のうち予め設定された制限帯域以下の送信信号r(k,M)を送信RF部5に出力する。
【0088】
送信RF部5は、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍数に逓倍した信号を生成する。送信RF部5は、生成された信号に基づいて動作する。
【0089】
周波数変換部9は、送信信号生成部4により生成された送信信号r(k,M)を入力し、入力されたベースバンドの送信信号r(k,M)をアップコンバートしてキャリア周波数帯域の高周波送信信号を生成する。周波数変換部9は、生成された高周波送信信号を増幅器10に出力する。
【0090】
増幅器10は、出力された高周波送信信号を入力し、入力された高周波送信信号のレベルを所定のレベルに増幅して送信アンテナAN1に出力する。この増幅された高周波送信信号は、送信アンテナAN1を介して空間に放射する様に送信される。
【0091】
送信アンテナAN1は、送信RF部5により出力された高周波送信信号を空間に放射する様に送信する。図5に示す様に、高周波送信信号は、送信周期Trのうち送信区間Twの間に送信され、非送信区間(Tr−Tw)の間には送信されない。
【0092】
なお、送信RF部5、及び各アンテナ系統処理部11a〜11dの受信RF部12a〜12d(不図示、以下同様)には、基準信号発振器Loにより生成されたリファレンス信号が所定倍に逓倍された信号が共通に供給されている。これにより、各送信RF部5及び受信RF部12a〜12d間の同期を確立することができる。
【0093】
なお、上述した符号生成部6を送信信号生成部4に設けず、図6に示す様に、送信信号生成部4により生成された送信符号anを予め記憶する送信符号記憶部CMを設けても良い。更に、送信信号生成部4により相補符号が生成されるには、相補符号のペア、例えば、送信符号an及びbnが共に送信符号記憶部CMに記憶されることが好ましい。
【0094】
なお、図6に示した送信符号記憶部CMは、第1の実施形態に限らず、後述の各実施形態にも同様に適用することができる。図6に示す様に、送信信号生成部4rは、送信符号記憶部CM、送信符号制御部CT3、変調部7r、及びLPF8rを含む構成である。
【0095】
図6において、送信符号制御部CT3は、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に基づいて、送信周期Tr毎に、送信符号an(又は相補符号を構成する送信符号an,送信符号bn)を、送信符号記憶部CMから巡回的に読み出して変調部7rに出力する。変調部7rに出力された以降の動作は上述した変調部7及びLPF8と同様のため、動作の説明は省略する。
【0096】
(レーダ受信部)
次に、レーダ受信部3の各部の構成について説明する。レーダ受信部3には、複数の例えば4つのアレーアンテナが構成されている。以下、レーダ受信部3の各部の構成について図4を参照して説明する。図4に示すレーダ受信部3は、アンテナ系統処理部の個数が4で、相関値演算部及び到来時間方向推定部の個数が2である。
【0097】
レーダ受信部3は、図4に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11a〜11d、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26を備える。以下の説明においては、4つのアンテナ系統処理部11a〜11dの各部の構成及び動作は同様であるため、アンテナ系統処理部11aを例示して説明し、後述の各実施形態においても同様である。
【0098】
アンテナ系統処理部11aは、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13aを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13aは、A/D変換部17a,18a、S/P変換部19a、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。レーダ受信部3は、各送信周期Trを信号処理部13a〜13d(不図示、以下同様)における信号処理区間として周期的に演算する。
【0099】
高分解能処理部26は、図8に示す様に、受信信号レベル判定部27、一致判定範囲抽出部28及び一致判定部29を備える。
【0100】
次に、レーダ受信部3の各部の動作について説明する。
【0101】
受信アンテナAN2aは、レーダ送信部2により送信された高周波送信信号がターゲットにより反射された反射波の信号を受信する。受信アンテナAN2により受信された受信信号は、受信RF部12aに出力される。
【0102】
受信RF部12aは、送信RF部5と同様に、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。受信RF部12aは、生成された信号に基づいて動作する。
【0103】
増幅器14aは、受信アンテナAN2aにより受信された高周波帯域の受信信号を入力し、入力された受信信号のレベルを増幅して周波数変換部15aに出力する。
【0104】
周波数変換部15aは、増幅器14aにより出力された高周波帯域の受信信号を入力し、入力された高周波帯域の受信信号をベースバンドにダウンコンバートし、ダウンコンバートされた受信信号を直交検波部16aに出力する。
【0105】
直交検波部16aは、周波数変換部15aにより出力されたベースバンドの受信信号を直交検波することで、同相信号(In-phase signal)及び直交信号(Quadrate signal)を用いて構成されるベースバンドの受信信号を生成する。直交検波部16aは、生成された受信信号のうち、同相信号をA/D変換部17aに出力し、生成された受信信号のうち、直交信号をA/D変換部18aに出力する。
【0106】
A/D変換部17aは、直交検波部16aにより出力されたベースバンドの同相信号を離散時刻kによってサンプリングし、アナログデータの同相信号をデジタルデータに変換する。A/D変換部17aは、変換されたデジタルデータの同相信号成分を、S/P変換部19aに出力する。
【0107】
A/D変換部17aは、レーダ送信部2により生成される送信信号r(k、M)を、1つのパルス幅(パルス時間)Tp(=Tw/L)あたりNs[個]によって、サンプリングする。A/D変換部17aのサンプリングレートは、Nsとなる。
【0108】
同様に、A/D変換部18aは、直交検波部16aにより出力されたベースバンドの直交信号を離散時刻kによってサンプリングし、アナログデータの直交信号をデジタルデータに変換する。A/D変換部18aは、変換されたデジタルデータの直交信号成分を、S/P変換部19aに出力する。
【0109】
A/D変換部18aは、レーダ送信部2により生成される送信信号r(k、M)を、1つのパルス幅(パルス時間)Tp(=Tw/L)あたりNs[個]によって、サンプリングする。A/D変換部18aのサンプリングレートは、Nsとなる。図4には、A/D変換部17a及びA/D変換部18aの各サンプリングレートNsが2であるレーダ受信部3の構成が示されている。
【0110】
また、A/D変換部17a,18aにより変換された第M番目の送信周期Trの離散時刻kにおける受信信号は、受信信号の同相信号成分I(k、M)及び受信信号の直交信号成分Q(k、M)を用いて、数式(9)の複素信号x(k、M)として表される。以下の各実施形態においても同様である。
【0111】
【数9】
【0112】
ここで、離散時刻k=1は、各送信周期Trの開始時点を示す。また、離散時刻k=Nr×(Ns/No)は、各送信周期Trにおける送信区間Twの終了時点を示す。更に、離散時刻k=(Nr+Nu)×(Ns/No)は、各送信周期Trの終了直前時点を示す。
【0113】
S/P変換部19aは、A/D変換部17a及びA/D変換部18aによりそれぞれ出力されたデジタルデータの同相信号成分及び直交信号成分を入力する。S/P変換部19aは、A/D変換部17a,18aのサンプリングレートNsに応じて、入力された同相信号成分及び直交信号成分からなる複素数x(k,M)の出力を、離散時刻毎に順次切り換える。なお、本発明の各実施形態においては、パラメータNs=2を例示して説明しているため相関値演算部は2つ設けられているが、パラメータNsは2に限定されない。
【0114】
具体的には、S/P変換部19aは、離散時刻kにおける複素数x(k,M)を、第{mod(k−1,Ns)+1}番目の相関値演算部に出力する。これにより、第1から第Nsまでの相関値演算部に入力される複素数(以下、離散サンプル値と表記する)x(k,M)は、1パルス当たりのサンプリングレートが1となり、サンプルタイミングがTp/Ns=(Tw/L)/Nsずつシフトしたものとなる。なお、mod(k−1,Ns)は、(k−1)がNsを用いて除算された余りを出力する演算子である。
【0115】
以下の説明において、S/P変換部19aから第p番目の相関値演算部への出力された離散サンプル値を、yp(q,M)と表記する。パラメータpは、p=1,…,Nsである。パラメータqは、q=1,…,(Nr+Nu)/Noである。
【0116】
第1相関値演算部20aは、S/P変換部19aにより出力された離散サンプル値yp(q,M)を入力する。第1相関値演算部20aは、送信信号生成部4の動作と同期を確立することで、送信信号生成部4と同様に、基準信号発振器Loにおいて生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。なお、図4では、第1相関値演算部20aへのリファレンス信号の入力は省略している。
【0117】
第1相関値演算部20aは、リファレンス信号を所定倍に逓倍された信号に基づいて、離散時刻qに応じて、第M番目の送信周期Trにおいて送信する符号長Lのパルス圧縮符号an(M)を周期的に生成する。ここで、パラメータn=1,…,Lである。
【0118】
また、第1相関値演算部20aは、入力された離散サンプル値yp(q,M)と、パルス圧縮符号an(M)との第1相関値ACp(q,M)を演算する。このパラメータACp(q,M)は、離散時刻qにおける第1相関値を示す。この第1相関値演算部20aにより演算された第1相関値ACp(q,M)において、パラメータpはp=1である。
【0119】
具体的には、第1相関値演算部20aは、図7に示す各送信周期Tr、即ち離散時刻q=1〜(Nr+Nu)/Noにおいては、数式(10)に従って第1相関値ACp(q,M)を演算する。第1相関値演算部20aは、数式(10)に従って演算された第1相関値ACp(q,M)を加算処理部22aに出力する。パラメータuは遅延時間を示す。
【0120】
図7の第1段は、高周波送信信号の送信タイミングを示し、第2段は、反射波の受信タイミングを示す。反射波は、送信区間Twの間に送信された高周波送信信号が、ターゲットにより反射された波である。
【0121】
【数10】
【0122】
第2相関値演算部21aは、S/P変換部19aにより出力された離散サンプル値yp(q,M)を入力する。第2相関値演算部21aは、送信信号生成部4の動作と同期を確立することで、送信信号生成部4と同様に、基準信号発振器Loにおいて生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。なお、図4では、第2相関値演算部21aへのリファレンス信号の入力は省略している。
【0123】
第2相関値演算部21aは、リファレンス信号を所定倍に逓倍された信号に基づいて、離散時刻qに応じて、第M番目の送信周期Trにおいて送信する符号長Lのパルス圧縮符号an(M)を周期的に生成する。ここで、n=1,…,Lである。
【0124】
また、第2相関値演算部21aは、入力された離散サンプル値yp(q,M)と、パルス圧縮符号an(M)との第2相関値ACp(q,M)を演算する。このパラメータACp(q,M)は、離散時刻qにおける第2相関値を示す。この第2相関値演算部21aにより演算された第2相関値ACp(q,M)において、パラメータpはp=2である。
【0125】
具体的には、第2相関値演算部21aは、図7に示す各送信周期Tr、即ち離散時刻q=1〜(Nr+Nu)/Noにおいては、数式(10)に従って第2相関値ACp(q,M)を演算する。第2相関値演算部21aは、数式(10)に従って演算された第2相関値ACp(q,M)を加算処理部23aに出力する。
【0126】
第1相関値演算部20a及び第2相関値演算部21aの各演算は、離散時刻q=1〜(Nr+Nu)/Noにおいて実行される。なお、レーダ装置1の測定対象となるターゲットの存在範囲によって、測定レンジ(qの範囲)を、例えばq=(L+1)〜{((Nr+Nu)/No)−L}の様に更に狭めた限定をしてもよい。
【0127】
図7の第2段に示す様に、離散時刻q=(L+1)は、送信区間Twの終了時刻の次の離散時刻を示す。更に、離散時刻q=(L+1)は、反射波の信号が、離散時刻q=0より遅延時間τ1ほど遅れて開始される受信の開始時刻である。この遅延時間τ1は、数式(11)により示される。
【0128】
【数11】
【0129】
更に、図7の第2段に示す様に、離散時刻q={((Nr+Nu)/No)−L}は、送信周期Trの終了時刻から送信区間Tw(=Tp×L)前の時刻に相当する。更に、離散時刻q={((Nr+Nu)/No)−L}は、反射波の信号が、離散時刻q=0より遅延時間τ2ほど遅れて開始される受信の開始時刻である。この遅延時間τ2は、数式(12)により示される。
【0130】
【数12】
【0131】
従って、第1相関値演算部20a及び第2相関値演算部21aは、少なくとも離散時刻q=(L+1)〜{((Nr+Nu)/No)−L}の範囲において上述した数式(10)に示す第1相関値及び第2相関値を演算しても良い。これにより、レーダ装置1は、第1相関値演算部20a及び第2相関値演算部21aの演算量を低減することができる。即ち、レーダ装置1は、信号処理部13aによる演算量の削減に基づく消費電力量を低減することができる。他のアンテナ系統処理部11b〜11dに関しても同様である。
【0132】
更に、レーダ装置1は、高周波送信信号の送信区間Twにおいて測定せず、高周波送信信号がレーダ受信部3に直接的に回り込んだとしても、回り込みによる影響を排除して測定することができる。この測定レンジ(離散時刻qの範囲)を限定することで、後述する第1加算処理部22a、第2加算処理部23a、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26の動作も同様の測定レンジに限定した範囲となる。
【0133】
第1加算処理部22aは、第1相関値演算部20aにより出力された第1相関値ACp(q,M)を入力する。第1加算処理部22aは、第M番目の送信周期Trにおいて乗算された第1相関値ACp(q,M)を単位として、複数R回、加算平均する。パラメータRは自然数である。
【0134】
即ち、第1加算処理部22aは、第m番目の送信周期Trにおける第1相関値ACp(q,m)から第(m+R−1)番目の送信周期Trにおける第1相関値ACp(q,m+R−1)を単位として、離散時刻qのタイミングを揃えて平均第1相関値aveACp(q,M)を演算する。この平均第1相関値aveACp(q,M)においては、パラメータpはp=1である。第1加算処理部22aは、演算された平均相関値aveACp(q,M)を第1到来時間方向推定部24に出力する。なお、パラメータmは、ゼロを含む自然数Rの倍数である。
【0135】
第2加算処理部23aは、第2相関値演算部21aにより出力された第2相関値ACp(q,M)を入力する。第2加算処理部23aは、第M番目の送信周期Trにおいて乗算された第2相関値ACp(q,M)を単位として、複数R回、加算平均する。
【0136】
即ち、第2加算処理部23aは、第m番目の送信周期Trにおける第2相関値ACp(q,m)から第(m+R−1)番目の送信周期Trにおける第2相関値ACp(q,m+R−1)を単位として、離散時刻qのタイミングを揃えて平均第2相関値aveACp(q,M)を演算する。この平均第2相関値aveACp(q,M)においては、パラメータpはp=2である。第2加算処理部23aは、演算された平均相関値aveACp(q,M)を第2到来時間方向推定部25に出力する。
【0137】
これらの第1加算処理部22a及び第2加算処理部23aの動作により、レーダ装置1は、雑音成分を更に抑圧することで、SNR(Signal Noise Ratio)を向上することができる。更に、レーダ装置1は、ターゲットの到来距離の推定に関する測定性能を向上することができる。
【0138】
第1到来時間方向推定部24は、各アンテナ系統処理部11a〜11dの各第1加算処理部22a〜22d(不図示、以下同様)により出力された各平均相関値aveACp(q,M)を入力する。第1到来時間方向推定部24は、4つの受信アンテナを用いて各アンテナ系統処理部により演算された各平均相関値aveACp(q,M)に基づいて、ターゲットからの反射波の受信電力を推定し、推定結果に基づき到来時間を測定する。さらに離散時刻q毎に、複数の受信アンテナによるレーダ測定ターゲットの受信位相差を基にして、レーダ装置1からターゲットまでの到来方向を推定演算する。
【0139】
この推定演算の結果(推定結果)には、最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第1到来時間方向推定部24は、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。
【0140】
なお、第1到来時間方向推定部24によるターゲットまでの到来方向の推定演算は、既に公知の技術であり、例えば下述参考非特許文献2を参照することにより実現することが可能である。
【0141】
(参考非特許文献2)JAMES A. Cadzow、「Direction of Arrival Estimation Using Signal Subspace Modeling」、IEEE、Vol.28、pp.64−79(1992)
【0142】
第2到来時間方向推定部25は、各アンテナ系統処理部11a〜11dの各第2加算処理部23a〜23d(不図示、以下同様)により出力された各平均相関値aveACp(q,M)を入力する。第2到来時間方向推定部25は、4つの受信アンテナを用いて各アンテナ系統処理部により演算された各平均相関値aveACp(q,M)に基づいて、ターゲットからの反射波の受信電力を推定し、推定結果に基づき到来時間を測定する。さらに離散時刻q毎に、レーダ装置1からターゲットまでの到来方向を推定演算する。
【0143】
同様に、この推定演算の結果(推定結果)には、最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第2到来時間方向推定部25は、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。
【0144】
なお、第2到来時間方向推定部25によるターゲットまでの到来方向の推定演算は、既に公知の技術であり、例えば上述参考非特許文献2を参照することにより実現することが可能である。
【0145】
高分解能処理部26は、第1到来時間方向推定部24a及び第2到来時間方向推定部25aにより出力された各推定結果[POWp(q,m),DOAp(q,m)]を入力する。高分解能処理部26の動作の説明においては、図13及び図14を参照して説明する。
【0146】
受信信号レベル判定部27は、入力された各推定結果[POWp(q,m),DOAp(q,m)]のうち、受信電力推定結果POWp(q,m)が所定の受信信号レベルLc以上であるかを判定する(S11)。所定の受信信号レベルLcは、所定のターゲット検出率を上回り、かつ、ターゲットの誤検出率を下回る受信SNRに設定することが好ましい。即ち、パラメータp及びqによって定まる離散時刻(p,q)のうち、数式(13)を満たす離散時刻(r,s)である推定結果DOUTr(s,m)を一致判定範囲抽出部28に出力する(S11)。ここで、パラメータp及びqによって定める離散時刻は、測定時間又はサンプルタイミングと呼んでも良い。
【0147】
【数13】
【0148】
一致判定範囲抽出部28は、受信信号レベル判定部27により出力された推定結果DOUTr(s,m)を入力する。一致判定範囲抽出部28は、各離散時刻(r,s)の前後の測定時刻に相当するサンプリングレートNsに応じた所定の時間範囲、具体的には相関広がり範囲(2Ns−1)の2倍の個数に相当する各推定結果DOAp(q,m)のうち、DOUTr(s,m)として抽出されたものの集合を、一致判定範囲の単位として一致判定部29に出力する(S12)。
【0149】
この一致判定範囲抽出部28により出力される一致判定範囲の単位に相当する各推定結果の集合は、図9に示した各推定結果の順序によって抽出される。
【0150】
また、一致判定範囲抽出部28は、一致判定範囲の単位の個数分の各推定結果の集合を、相関広がり範囲(2Ns−1)に応じてceil[(2Ns−1)/2]ずつシフトしたものを更に抽出する(S13)。以下、一致判定範囲抽出部28によりw番目に抽出された一致判定範囲の各推定結果を、DOUT_SEL(w)と表記する。
【0151】
更に、一致判定範囲抽出部28は、抽出を、送信周期Trにおける離散時刻の終了時までの離散サンプル値に対する推定結果DOUTNs((Nr+Nu)/No,m)まで繰り返す(S13)。同様に、これらの抽出された各一致判定範囲は、一致判定部29に出力される。
【0152】
なお、ceil[(2Ns−1)/2]は、(2Ns−1)/2の小数点以下を整数値に切り上げるための演算子である。例えば、Ns=2では、ceil[(2Ns−1)/2]=ceil[1.5]となり、一致判定範囲抽出部28により一致判定範囲の抽出には、各推定結果が2つシフトされることになる。
【0153】
この抽出された各一致判定範囲の単位に相当する各推定結果の集合は、図10に示される。図10には、Ns=2である第w番目、第(w+1)番目及び第(w+2)番目の一致判定範囲が、それぞれ示されている。パラメータwは自然数である。
【0154】
更に、一致判定範囲抽出部28は、ステップS13により抽出された一致判定範囲の単位に相当する各推定結果の集合を、例えば3つのブロック(B1,B2,B3)に分割する(S14)。この各推定結果が分割された例が、図11に示されている。例えば、均等に3分割することが困難なので、図11(b)及び図11(c)に示す様に、中心となるブロックB2に多くの各推定結果が含まれる様に分割されることが好ましい。
【0155】
ステップS15以降の動作は、一致判定部29の動作であり、ステップS12及びS13により抽出されたDOUT_SEL(w)に対して行われる動作である。
【0156】
一致判定部29は、一致判定範囲抽出部28により出力された第w番目の一致判定範囲DOUT_SEL(w)に含まれる各推定結果の集合を用いて、レーダ装置1からターゲットへの到来方向推定結果の一致性を判定する。更に、一致判定部29は、ステップS12及びS13により抽出された或る送信周期Trにおける全ての一致判定範囲に対してステップS15の動作を繰り返す。以下、ステップS15の動作の詳細について説明する。
【0157】
一致判定部29は、第w番目の一致判定範囲DOUT_SEL(w)に含まれ、且つ、数式(10)を満たす各推定結果のうち、最大の受信電力推定結果(POWp_peak(q_peak,m))を含む推定結果を選択する(S15−1)。一致判定部29は、選択された推定結果の最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)が、ステップS14により分割された中心のブロックB2の各推定結果における離散時刻であるか否かを判定する(S15−2)。
【0158】
中心のブロックB2の各推定結果における離散時刻でないと判定されたとする(S15−2、NO)。一致判定部29は、第w番目の一致判定範囲DOUT_SEL(w)に対する動作を終了し、次の第(w+1)番目の一致判定範囲DOUT_SEL(w+1)に対してステップS15の動作を行う(S15−4)。
【0159】
中心のブロックB2の各推定結果における離散時刻であると判定されたとする(S15−2、YES)。一致判定部29は、測定時間(p_peak,q_peak)の到来方向推定結果DOAp_peak(q_peak,m)と時間的に連続する前後の離散時刻の離散サンプル値に対する到来方向推定結果との差の絶対値が所定値未満か否かを判定する(S15−3)。
【0160】
この所定値は、レーダ装置1の距離分解能ΔR(数式(1)参照)以内に複数のターゲットが存在するか否かを判定するための閾値とされる。
【0161】
ステップS15−3において差の絶対値が所定値未満であると判定されたとする(S15−3、YES)。一致判定部29は、レーダ装置1の距離分解能ΔR以内に複数のターゲットが存在しないと判定する(S15−5)。更に、一致判定部29は、最大の受信電力推定結果と、最大の受信電力推定結果を含む推定結果における到来方向推定結果とを、高分解能到来方向推定結果(図8参照)として出力する。
【0162】
ステップS15−3において差の絶対値が所定値以上であると判定されたとする(S15−3、NO)。一致判定部29は、レーダ装置1の距離分解能ΔR以内に複数のターゲットが存在すると判定する(S15−6)。更に、一致判定部29は、最大の受信電力POWp_peak(q_peak,m)を中心として時間的に前後の各相関広がり範囲(2Ns−1)における各推定結果のうち、到来方向推定結果の一致性が高いものが存在するか否かを判定する(S15−7)。
【0163】
到来方向推定結果の一致性が高いとは、複数のターゲットがいると判定された後において、各ターゲットに対するレーダ装置1における到来方向推定結果の信頼性が高いということを意味する。例えば複数のターゲットとして、ターゲットA及びターゲットBがいるとする。到来方向推定結果の一致性が高いと、ターゲットA及びターゲットBによりそれぞれ反射された反射波の信号の到来における相対遅延は、パルス幅Tp以上となる。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果とが重複しないことになる。
【0164】
反対に、到来方向推定結果の一致性が高くないと、ターゲットA及びターゲットBによりそれぞれ反射された反射波の信号の到来における相対遅延は、パルス幅Tp未満となる。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果とが重複することになる。
【0165】
ステップS15−7において到来方向推定結果の一致性が高いものが存在すると判定されたとする(S15−7、YES)。一致判定部29は、最大の受信電力を中心として時間的に前後の各相関広がり範囲における各推定結果のうち、到来方向推定結果の一致性が高いものを高分解能到来方向推定結果(図8参照)として出力する(S15−8)。
【0166】
ステップS15−7において到来方向推定結果の一致性が高いものが存在しないと判定されたとする(S15−7、NO)。一致判定部29は、最大の受信電力推定結果を中心として、時間的に前後の各相関広がり範囲における各推定結果から、数式(10)を満たす離散時刻のうち最も時間的に離れている離散時刻における到来方向推定結果を出力する(S15−9)。
【0167】
ここで、レーダ装置1の距離分解能以下の範囲に複数のターゲットが存在するので、図12に示す様に、各ターゲットからの各反射波の信号が、1.0パルス幅Tp以下の相対遅延時間以内に到来したとする。
【0168】
例えば、図12(a)に示す様に、各ターゲットからの各反射波の信号の到来における相対遅延が1.0パルス幅Tpであるとする。レーダ装置1は、各反射波の信号が合成されていない離散時刻における相関値を用いた到来方向推定結果(同図の符号C1,C2)を選択する。これにより、レーダ装置1は、レーダ装置1の距離分解能以内に存在する複数のターゲットを分離して検出することができ、ターゲットの到来方向の推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0169】
また、例えば図12(b)及び図12(c)に示す様に、各ターゲットからの各反射波の信号の到来における相対遅延が0.5パルス幅(Tp/2)又は0.3…パルス幅(Tp/3)であるとする。レーダ装置1は、各反射波の信号の合成の影響が小さい離散時刻における相関値を用いた到来方向推定結果(図12(b)の符号C3,C4,図12(c)の符号C5,C6)を選択する。これにより、レーダ装置1は、レーダ装置1の距離分解能以内に存在する複数のターゲットを分離して検出することができ、ターゲットの到来方向の推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0170】
上述した第1の実施形態のレーダ装置1の効果について、図15を参照して説明する。図15は、高分解能処理部26の推定結果を模式的に示した説明図である。同図(a)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅1.5Tpとした説明図である。同図(b)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図である。同図(c)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図である。同図(d)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図である。
【0171】
図14においては、ターゲットAからの反射波の信号の受信信号レベルと、ターゲットBからの反射波の信号の受信信号レベルとが、ほぼ等しいと想定されている。即ち、ターゲットA及びターゲットBは、レーダ装置1の距離分解能程度の範囲に存在することが想定されている。図14の丸印(○)の中心点の座標は到来方向推定結果DOAp(q,m)、丸印の大きさは受信電力推定結果POWp(q,m)の大きさを表している。
【0172】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tpよりも大きい時間である1.5Tpであるとする(図15(a)参照)。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わることがない。即ち、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲における各到来方向推定結果が一致し、レーダ装置1は、各到来方向推定結果をターゲットA,Bの真値として推定することができる。
【0173】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅1.0Tpに等しいとする(図15(b)参照)。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0174】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0175】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−8の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない離散時刻における到来方向推定結果を、受信電力推定値としては劣っていても選択して出力することができる。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0176】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/2に等しいとする(図15(c)参照)。同様に、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0177】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0178】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−9の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない最も時間的に離散した離散時刻における到来方向推定結果を選択して出力する。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0179】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3に等しいとする(図15(d)参照)。同様に、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0180】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0181】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−9の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない最も時間的に離散した離散時刻における到来方向推定結果を選択して出力する。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0182】
更に、第1の実施形態のレーダ装置1では、上述した特許文献1に開示されているフィルタバンクを用いることがないため、レーダ装置1の回路規模の増大を抑制することができる。
【0183】
なお、第1の実施形態においては、相関広がり範囲として(2Ns−1)として説明した。但し、複数の各ターゲットからの反射波の信号のレーダ受信部3における受信タイミング(到来タイミング)がレーダ受信部3のサンプリングレートに一致しないことも考慮して、相関広がり範囲を2Nsとしても良い。
【0184】
〔第1の実施形態の変形例1〕
第1の実施形態の変形例1では、第1の実施形態のレーダ装置1の高分解能処理部26の一致判定部29のステップS15−9の動作を、後述する動作に置き換える。この置き換えられた動作を除く第1の実施形態の変形例1のレーダ装置の他の動作は第1の実施形態のレーダ装置1と同様であるため、以下、置き換える動作の内容のみ説明し、置き換えられた動作を除く他の動作の説明は省略する。
【0185】
第1の実施形態の変形例1のレーダ装置では、一致判定部は、第1の実施形態のレーダ装置1の高分解能処理部26の一致判定部29のステップS15−9に対応して、次の様な動作を行う。
【0186】
具体的には、一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に前側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp1(q1,m)を選択する。更に、一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に後側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp2(q2,m)を選択する。
【0187】
更に、一致判定部は、最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)における到来方向推定結果DOAp_peak(q_peak,m)を用いて、選択された到来方向推定結果DOAp1(q1,m)及びDOAp2(q2,m)を外挿的に補正する。
【0188】
この外挿的な補正は、数式(14)及び数式(15)に示す様に行われる。一致判定部は、補正された到来方向推定結果cDOAp1(q1,m)及びcDOAp2(q2,m)を高分解能到来方向推定結果(図8参照)として出力する。外挿的な補正は、例えば線形補間が用いられている。パラメータαは所定の係数である。
【0189】
【数14】
【0190】
【数15】
【0191】
なお、パラメータαは固定値でも良いが、各離散時刻(p1,q1),(p2,q2),(p_peak,q_peak)における受信電力推定結果POWp1(q1,m),POWp2(q2,m)及びPOWp_peak(q_peak,m)によって重み付けした可変値としても良い。また、数式(14)及び数式(15)において、ΔT[(p1,q1)−(p_peak,q_peak)]は、離散時刻(p1,q1)と離散時刻(p_peak,q_peak)の時間差を表す。
【0192】
図16は、第1の実施形態の変形例1のレーダ装置の高分解能処理部の推定結果を模式的に示した説明図である。図16において、上述した外挿的な補正によって演算された到来方向推定結果cDOAp1(q1,m)及びcDOAp2(q2,m)は、黒丸印(●)により表されている。但し、パラメータα=1とする。
【0193】
以上により、第1の実施形態の変形例1のレーダ装置は、上述した外挿的な補正によって、第1の実施形態のレーダ装置1に比べて、各ターゲットの方向推定精度をより向上することができる。特に、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3に等しいと顕著である。
【0194】
また、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延が、パルス幅Tp/2又はTp/3に等しいのであれば、上述した図13のステップS15−9と外挿的な補正との動作とを併用しても良い。
【0195】
具体的には、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3程度であるとする。一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に前側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp1(q1,m)を選択する。更に、一致判定部は、最大の受信電力推定結果を中心として、数式(10)を満たす離散時刻のうち時間的に後側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp2(q2,m)を選択する。
【0196】
更に、一致判定部は、最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)における到来方向推定結果DOAp_peak(q_peak,m)を用いて、選択された到来方向推定結果DOAp1(q1,m)及びDOAp2(q2,m)を外挿的に補正する。
【0197】
一方、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/2程度であるとする。一致判定部は、最大の受信電力推定結果を中心として、時間的に前後の各相関広がり範囲における各推定結果から、数式(10)を満たす離散時刻のうち最も離散している離散時刻における到来方向推定結果を出力する。
【0198】
これにより、第1の実施形態の変形例1のレーダ装置よりも、更に各ターゲットの方向推定精度をより向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0199】
〔第1の実施形態の変形例2〕
第1の実施形態の変形例2では、第1の実施形態のレーダ装置1のレーダ受信部3におけるNs倍のオーバーサンプルの代わりに、レーダ送信部2における送信符号の出力タイミングを所定のサンプリングレートを用いて送信周期Tr毎に周期的にシフトする。
【0200】
図17は、第1の実施形態の変形例2のレーダ装置1xの内部構成を詳細に示すブロック図である。図18は、第1の実施形態の変形例2のレーダ装置1xの動作に関するタイミングチャートである。
【0201】
レーダ装置1xと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。以下、レーダ装置1xの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0202】
図17において、レーダ装置1xは、送信タイミング制御部33、送信アンテナAN1と接続されるレーダ送信部2x、及び、各受信アンテナAN2a〜AN2dと接続される各アンテナ系統処理部11ax〜11dx(不図示、以下同様)を有するレーダ受信部3を備える。なお、レーダ送信部2x及びレーダ受信部3xは、共に基準信号発振器Loに接続され、基準信号発振器Loから信号が供給され、レーダ送信部2x及びレーダ受信部3xの処理の同期が揃うようになっている。
【0203】
(レーダ送信部)
次に、レーダ送信部2xの各部の構成について説明する。
【0204】
レーダ送信部2xは、図17に示す様に、送信信号生成部4x及び送信RF部5を備える。送信信号生成部4xは、符号生成部6、変調部7、LPF8、遅延器31及び送信タイミング切換部32を備える。
【0205】
次に、レーダ送信部2xの各部の動作について説明する。
【0206】
送信信号生成部4xは、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。送信信号生成部4xの各部は、生成された信号に基づいて動作する。
【0207】
変調部7により生成されたベースバンドの送信信号r(k,M)は、LPF8を介して、遅延器31及び送信タイミング切換部32に出力される。
【0208】
遅延器31は、LPF8を介して出力された送信信号r(k,M)に対して、所定の遅延時間ΔDの遅延を与え、遅延時間ΔDを与えられた送信信号r(k,M)を送信タイミング切換部32に出力する。この所定の遅延時間ΔDに関しては、数式(16)が成立する。
【0209】
【数16】
【0210】
送信タイミング切換部32は、LPF8を介して出力された送信信号r(k,M)及び遅延器31により出力された送信信号r(k、M)を入力する。送信タイミング切換部32は、送信タイミング制御部33により出力された送信タイミング制御信号に応じて、LPF8を介して出力された送信信号r(k,M)又は遅延器31により出力された送信信号r(k,M)の出力を切り換える。送信タイミング切換部32は、切り換えによって選択された送信信号r(k,M)を送信RF部5に出力する。
【0211】
送信タイミング制御部33は、基準信号発振器Loにより生成されたリファレンス信号を所定倍に逓倍した信号に基づいて動作する。送信タイミング制御部33は、信号に基づいて、送信周期Tr毎若しくは送信周期Trの整数倍毎に、送信タイミング切換部32の出力を切り換える旨の送信タイミング制御信号を、送信タイミング切換部32及び相関値演算入力切換部34aに出力する。なお、この送信タイミング制御信号には、相関値演算入力切換部34aの出力を切り換える旨の信号が含まれる。
【0212】
(レーダ受信部)
次に、レーダ受信部3xの各部の構成について説明する。レーダ受信部3xには、第1の実施形態のレーダ装置1と同様に、複数の例えば4つのアレーアンテナが構成されている。更に、第1の実施形態のレーダ装置1と同様に、アレーアンテナを構成する各受信アンテナはアンテナ系統処理部毎に設けられている。
【0213】
レーダ受信部3xは、図17に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11ax〜11dx、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26を備える。以下の説明においては、4つのアンテナ系統処理部11ax〜11dxの各部の構成及び動作は同様であるため、アンテナ系統処理部11axを例示して説明する。
【0214】
アンテナ系統処理部11axは、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13axを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13axは、A/D変換部17a,18a、相関値演算入力切換部34a、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。レーダ受信部3xは、各送信周期Trを信号処理部13ax〜13dx(不図示、以下同様)における信号処理区間として周期的に演算する。
【0215】
次に、レーダ受信部3xの各部の動作について説明する。
【0216】
A/D変換部17aにより変換されたデジタルデータの同相信号成分、及びA/D変換部18aにより変換されたデジタルデータの直交信号成分は、相関値演算入力切換部34aに出力される。
【0217】
相関値演算入力切換部34aは、A/D変換部17a及びA/D変換部18によりそれぞれ出力されたデジタルデータの同相信号成分及び直交信号成分を入力する。相関値演算入力切換部34aは、A/D変換部17a,18aのサンプリングレートNsに応じて、入力された同相信号成分及び直交信号成分からなる複素数x(k,M)の出力を、送信タイミング制御部33により出力された送信タイミング制御信号に応じて、離散時刻毎に順次切り換える。相関値演算入力切換部34aは、切り換えによって選択された複素数x(k,M)を、第1相関値演算部20a又は第2相関値演算部21aに出力する。
【0218】
図18には、送信タイミング制御信号、高周波送信信号、遅延時間τ1の受信信号、A/D変換部17a,18aのサンプルタイミング、及び相関値演算入力切換部34aの出力先がそれぞれ示されている。
【0219】
図18に示す様に、送信タイミング制御信号が遅延器31からの出力を選択しないと(遅延器出力OFF)、送信周期Trの開始タイミングに同期して、符号送信区間Twにわたって高周波送信信号が送信される。一方、送信タイミング制御信号が遅延器31からの出力を選択すると(遅延器出力ON)、送信周期Trの開始タイミングから上述した遅延時間ΔDだけ遅延して、符号送信区間Twにわたって高周波送信信号が送信される。
【0220】
従って、遅延器出力OFFでは、レーダ装置1xは、送信周期Trの開始タイミングから遅延時間τ1のタイミングにおいて、高周波送信信号の受信を開始する。一方、遅延器出力ONでは、レーダ装置1xは、送信周期Trの開始タイミングから遅延時間(τ1+ΔD)のタイミングにおいて、高周波送信信号の受信を開始する。
【0221】
これに対し、送信周期Trに同期して整数倍のサンプリングが行われるため、遅延器出力OFFと遅延器出力ONとでは、A/D変換器17a,18bのサンプルタイミングは、遅延時間ΔD(数式(13)参照)だけずれる。遅延時間ΔDをパルス幅Tpより小さい値に設定することで、第1の実施形態のサンプリングレートNsを用いた離散サンプル値を等価的に得ることができる。
【0222】
相関値演算入力切換部34aは、遅延器出力OFFの離散サンプル値x(k,M)を、第1相関値演算部20aへ出力し、遅延器出力ONの離散サンプル値x(k,M)を、第Ns(=2)番目の相関演算部(第2相関値演算部21a)へ出力する。以降の動作は、第1の実施形態と同様である。
【0223】
以上により、第1の実施形態の変形例2のレーダ装置1xは、レーダ受信部3xのA/D変換部17a,18aのサンプルタイミングよりも細かい単位を用いて、ターゲットからの反射波を受信することができる。これにより、レーダ装置1xによれば、ターゲットからの反射波の受信時におけるサンプリングレート(オーバーサンプル数)を等価的に高めることができる。
【0224】
これにより、レーダ装置1xでは、第1の実施形態のレーダ装置1のレーダ受信部3において得られたA/D変換のサンプリングレートと同様なサンプリングレートを、より低速なA/D変換部を用いることでも達成することができる。
【0225】
一般的にA/D変換部は、より低速なサンプリングレートを有すれば、量子化ビット数を高めることが、より容易となる。このため、レーダ受信部3xにおける受信ダイナミックレンジを高めることができ、車両/歩行者を含めたターゲットの検出精度を高めることができる。更に、低速なサンプリングレートを有するA/D変換部を用いることで、レーダ装置1xにおける消費電力を低減することができる。
【0226】
〔第1の実施形態の変形例3〕
第1の実施形態の変形例3では、第1の実施形態のレーダ装置1のレーダ受信部3のS/P変換部19aの代わりに、低速なサンプリングレートを有するA/D変換部を更に2つ用いる。
【0227】
図19は、第1の実施形態の変形例3のレーダ装置1yのレーダ受信部3yにおける第1アンテナ系統処理部11ayの内部構成を詳細に示すブロック図である。図20は、第1の実施形態の変形例3のレーダ装置1yのレーダ受信部3yにおける第1アンテナ系統処理部11ayにおける各A/D変換部の動作に関するタイミングチャートである。
【0228】
レーダ装置1yと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。レーダ装置1yのレーダ送信部の構成は、図4に示された第1の実施形態のレーダ装置1のレーダ送信部2と同様であり、図19にはレーダ装置1yのレーダ送信部の構成は省略している。
【0229】
以下、レーダ装置1yの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0230】
レーダ装置1yのレーダ受信部3yと第1の実施形態のレーダ装置1のレーダ受信部3とにおいて、第1アンテナ系統処理部11ayが第1アンテナ系統処理部11aと異なる。その他の第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26の構成及び動作は同様であるため、構成及び動作の説明は省略する。
【0231】
(アンテナ系統処理部)
次に、アンテナ系統処理部11ayの各部の構成について説明する。なお、レーダ装置1yのレーダ受信部3yには、第1の実施形態のレーダ装置1と同様に、複数の例えば4つのアレーアンテナが構成されている。更に、第1の実施形態のレーダ装置1と同様に、アレーアンテナを構成する各受信アンテナはアンテナ系統処理部毎に設けられている。
【0232】
アンテナ系統処理部11ayは、図19に示す様に、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13ayを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13ayは、遅延器35a、4つのA/D変換部17a1,17a2,18a1,18a2、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。アンテナ系統処理部11ayは、各送信周期Trを信号処理部13ay〜13dy(不図示、以下同様)における信号処理区間として周期的に演算する。
【0233】
次に、アンテナ系統処理部11ayの各部の動作について説明する。
【0234】
遅延器35aは、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して、所定の遅延時間ΔTDの遅延を与え、遅延時間ΔTDを与えられた信号をA/D変換部18a1,18a2にそれぞれ入力する。この所定の遅延時間ΔTDに関しては、数式(17)が成立する。
【0235】
【数17】
【0236】
A/D変換部17a1は、直交検波部16aにより出力された同相信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に同期したタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。A/D変換部17a1は、アナログデータの同相信号をデジタルデータに変換する。A/D変換部17a1は、変換されたデジタルデータの同相信号成分を、第1相関値演算部20aに出力する。
【0237】
A/D変換部17a2は、直交検波部16aにより出力された直交信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に同期したタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部17a2は、アナログデータの直交信号をデジタルデータに変換する。A/D変換部17a2は、変換されたデジタルデータの直交信号成分を、第1相関値演算部20aに出力する。
【0238】
A/D変換部18a1は、直交検波部16aにより出力された同相信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して遅延器35aから出力されたタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部18a1は、アナログデータの同相信号をデジタルデータに変換する。A/D変換部18a1は、変換されたデジタルデータの同相信号成分を、第2相関値演算部21aに出力する。
【0239】
A/D変換部18a2は、直交検波部16aにより出力された直交信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して遅延器35aから出力されたタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部18a2は、アナログデータの直交信号をデジタルデータに変換する。A/D変換部18a2は、変換されたデジタルデータの直交信号成分を、第2相関値演算部21aに出力する。
【0240】
A/D変換部17a1,17a2とA/D変換部18a1,18a2とのサンプルタイミングは、図20に示す様に、数式(17)によって示された遅延時間ΔTDの相対遅延がある。更に、A/D変換部17a1,17a2とA/D変換部18a1,18a2は、それぞれサンプリングレート2Tp/Nsを用いてサンプリングし、サンプリングされた離散サンプル値を第1相関値演算部20a及び第2相関値演算部21aに出力する。
【0241】
従って、上述した遅延器35a、A/D変換部17a1,17a2,18a1,18a2により、第1の実施形態におけるサンプリングレートTp/NsのA/D変換部17a,18a及びS/P変換部19aと同様な動作をすることが可能である。
【0242】
また、第1の実施形態の変形例3のレーダ装置1yでは、第1の実施形態のレーダ装置1に比べてA/D変換部は複数必要となる。しかし、レーダ装置1yでは、各A/D変換部のサンプリングレートをより低速にすることができる。
【0243】
これにより、レーダ装置1yによれば、各A/D変換部におけるA/D変換時の量子化精度を高める、即ち、量子化ビット数を多くすることが容易となり、レーダ装置1yにおける受信ダイナミックレンジを高めることができる。
【0244】
なお、図19に示されたアンテナ系統処理部11ayでは、A/D変換部17a1,17a2,18a1,18a2が設けられたが、更に多くのA/D変換部を設けても良く、同様な効果を得ることができる。このため、レーダ受信部3yにおける受信ダイナミックレンジを高めることができ、車両/歩行者を含めたターゲットの検出精度を高めることができる。更に、低速なサンプリングレートを有するA/D変換部を用いることで、レーダ装置1yにおける消費電力を低減することができる。
【0245】
〔第1の実施形態の変形例4〕
第1の実施形態の変形例4では、第1の実施形態のレーダ装置1のレーダ受信部3に到来時間方向選択部36を更に設ける。この到来時間方向選択部36を設けることで、第1到来時間方向選択部24z、第2到来時間方向選択部25z及び高分解能処理部26の処理量及び処理時間を低減することができる。
【0246】
図21は、第1の実施形態の変形例4のレーダ装置1zのレーダ受信部3zの内部構成を詳細に示すブロック図である。レーダ装置1zと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。レーダ装置1zのレーダ送信部の構成は、図4に示された第1の実施形態のレーダ装置1のレーダ送信部2と同様であり、図21にはレーダ装置1zのレーダ送信部の構成は省略している。
【0247】
以下、レーダ装置1zの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0248】
レーダ装置1zのレーダ受信部3zでは、第1の実施形態のレーダ装置1のレーダ受信部3と比べて、到来時間方向選択部36が更に設けられ、第1到来時間方向推定部24z及び第2到来時間方向選択部25zがそれぞれ第1到来時間方向推定部24及び第2到来時間方向推定部25とが動作において異なる。その他の各アンテナ系統処理部11a〜11dに関しては、第1の実施形態のレーダ装置1のレーダ受信部3の各アンテナ系統処理部11a〜11dと同様のため、内容の説明は省略する。
【0249】
(レーダ受信部)
次に、レーダ受信部3zの各部の構成について説明する。レーダ受信部3zには、複数の例えば4つのアレーアンテナが構成されている。
【0250】
レーダ受信部3zは、図21に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11a〜11d、第1到来時間方向推定部24z、第2到来時間方向推定部25z、到来時間方向選択部36、及び高分解能処理部26を備える。以下の説明において、必要に応じて、4つのアンテナ系統処理部11a〜11dのうち、アンテナ系統処理部11aを例示して説明する。
【0251】
レーダ装置1zのレーダ受信部3zにおいて、第1加算処理部22aにより出力された平均第1相関値aveAC1(q,M)は、第1到来時間方向推定部24z及び到来時間方向選択部36に出力される。なお、第2加算処理部23aにより出力された平均第2相関値aveAC2(q,M)は、第2到来時間方向推定部25zに出力される。
【0252】
なお、図21に示す様に、他のアンテナ系統処理部11b〜11dの各第1加算処理部により出力された平均第1相関値は、それぞれ第1到来時間方向推定部24z及び到来時間方向選択部36に出力される。なお、他のアンテナ系統処理部の各第2加算処理部により出力された平均第2相関値は、それぞれ第2到来時間方向推定部25zに出力される。
【0253】
到来時間方向選択部36は、各アンテナ系統処理部11a〜11dの各第1加算処理部により出力された各平均第1相関値に基づいて、ターゲットからの反射波の信号が所定の受信信号レベルより高い離散時刻を選択する。到来時間方向選択部36は、選択された離散時刻、及び離散時刻の時間的に前後の離散時刻を含む選択離散時刻情報を、第1到来時間方向推定部24z及び第2到来時間方向推定部25zにそれぞれ出力する。
【0254】
以下、到来時間方向選択部36の動作について詳細に説明する。
【0255】
到来時間方向選択部36は、各アンテナ系統処理部11a〜11dの各第1加算処理部により出力された各平均第1相関値を入力する。到来時間方向選択部36は、入力された各平均第1相関値に基づいて、各離散時刻(z,q)におけるアレーアンテナの平均受信電力を、数式(18)に従って演算する。パラメータqは、q=1〜(Nr+Nu)/Noである。
【0256】
【数18】
【0257】
到来時間方向選択部36は、数式(18)に従って演算された平均受信電力が所定の受信電力Lpよりも大きい離散時刻(z,qs)を選択する。パラメータqsは、qs=1〜(Nr+Nu)/Noのうち、数式(19)を満たす離散時刻である。
【0258】
【数19】
【0259】
到来時間方向選択部36は、選択された離散時刻(z,qs)と、離散時刻(z,qs)と時間的に前後する離散時刻(z,qs−1)及び(z,qs+1)を含む離散時刻の情報を選択離散時刻情報として、第1到来時間方向推定部24z及び第2到来時間方向推定部25zに出力する。以下では、上記の離散時刻の情報を(q,m)として記載する。(q,m)には、数式(19)を満たすことを条件に選択された離散時刻(z,qs)と、離散時刻(z,qs)と時間的に前後する離散時刻(z,qs−1)及び(z,qs+1)を含む。
【0260】
第1到来時間方向推定部24zは、各アンテナ系統処理部の第1加算処理部により出力された平均第1相関値のうち、到来時間方向選択部36により出力された選択離散時刻情報に含まれる離散時刻(q,m)における平均第1相関値を抽出する。第1到来時間方向推定部24zは、抽出された平均第1相関値に基づいて、ターゲットからの反射波の受信電力を推定し、それに基づき到来時間を測定する。さらに選択された離散時刻毎に、レーダ装置1zからターゲットまでの到来方向を推定演算する。
【0261】
この推定演算の結果(推定結果)には、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第1到来時間方向推定部24zは、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。ここでは、p=1である。
【0262】
同様に、第2到来時間方向推定部25zは、各アンテナ系統処理部の第2加算処理部により出力された平均第2相関値のうち、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における平均第2相関値を抽出する。第2到来時間方向推定部25zは、抽出された平均第2相関値に基づいて、ターゲットからの反射波の受信電力を推定し、それに基づき到来時間を測定する。さらに選択された離散時刻毎に、レーダ装置1zからターゲットまでの到来方向を推定演算する。
【0263】
この推定演算の結果(推定結果)には、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第2到来時間方向推定部25zは、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。ここでは、p=2である。
【0264】
高分解能処理部26は、第1到来時間方向推定部24z及び第2到来時間方向推定部25zにより出力された選択離散時刻情報の各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と受信電力推定結果POWp(q,m)である各推定結果[POWp(q,m),DOAp(q,m)]を入力する。ここでは、p=1,2である。以下の高分解能処理部26の動作の説明は、上述した第1の実施形態のレーダ装置1の高分解能処理部26と同様であるため省略する。
【0265】
以上により、各到来時間方向推定部は、全ての離散時刻q=1〜(Nr+Nu)/Noから数式(19)を満たす平均受信電力を基に選択された一部の離散時刻についてのみターゲットを到来方向推定する。これにより、レーダ装置1zによれば、ターゲット検出率の劣化を防ぎつつ、推定処理量及び推定処理時間を低減することができる。
【0266】
以上、図面を参照しながら各種の実施形態について説明したが、本発明のレーダ装置はかかる例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0267】
なお、第1の実施形態の変形例4において、到来時間方向選択部36は、上述した数式(16)を満たす離散時刻(z,q)を選択する代わりに、次の様な処理を行っても良い。具体的には、到来時間方向選択部36は、数式(18)に従って演算された平均受信電力ave_P(q,m)から、最も大きい平均受信電力から順にN_Lp個の各平均受信電力を得るときの各離散時刻を選択する。この選択された各離散時刻を(z、qs’))として表す。パラメータqs’は、離散時刻q=1〜(Nr+Nu)/Noを平均受信電力ave_P(q,m)の大きい順に並べ替えたうちの、上位N_Lp個の離散時刻である。
【0268】
これにより、各到来時間方向推定部の到来方向推定処理における離散時刻の上限が固定化されることになるため、レーダ装置1zにおいて最大限必要となる推定処理量及び推定処理時間を抑えることができる。
【0269】
なお、ターゲットまでの距離RTは、その到来時間推定結果TOAを基に、RT=C×TOA/2として変換することが可能であるため、本実施例における到来時間推定を到来距離推定と置き換えても良い。ここで、パラメータCは光の速度を示す。
【産業上の利用可能性】
【0270】
本発明は、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上するレーダ装置として有用である。
【符号の説明】
【0271】
1、1x、1y、1z レーダ装置
2、2x レーダ送信部
3、3x、3z レーダ受信部
4、4r、4x 送信信号生成部
5 送信RF部
6 符号生成部
7、7r 変調部
8、8r LPF
9、15a 周波数変換部
10、14a 増幅器
11a、11b、11c、11d、11ax、11ay、11bx、11cx、11dx アンテナ系統処理部
12a 受信RF部
13a、13ax、13ay 信号処理部
16a 直交検波部
17a、17a1、17a2、18a、18a1、18a2 A/D変換部
19a S/P変換部
20a 第1相関値演算部
21a 第2相関値演算部
22a 第1加算処理部
23a 第2加算処理部
24、24z 第1到来時間方向推定部
25、25z 第2到来時間方向推定部
26 高分解能処理部
27 受信信号レベル判定部
28 一致判定範囲抽出部
29 一致判定部
31、35a 遅延器
32 送信タイミング切換部
33 送信タイミング制御部
34a 相関値演算入力切換部
36 到来時間方向選択部
AN1 送信アンテナ
AN2a 受信アンテナ
CM 送信符号記憶部
CT3 送信符号制御部
Lo 基準信号発振器
Tp パルス幅
Tr 送信周期
Tw 送信区間
τ1、τ2 遅延時間
【技術分野】
【0001】
本発明は、ターゲットに反射された反射波の信号を受信アンテナにより受信してターゲットを検出するレーダ装置に関する。
【背景技術】
【0002】
レーダ装置は、測定地点から電波を空間に放射し、ターゲットに反射された反射波の信号を受信して、測定地点とターゲットとの距離、方向の少なくとも1つ以上を測定する。特に近年、マイクロ波又はミリ波を含む波長の短い電波を用いて高分解能に測定することで、自動車だけでなく歩行者も含めてターゲットとして検出可能なレーダ装置の開発が進められている。
【0003】
また、レーダ装置は、近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信することがある。特に、近距離に存在するターゲットからの反射波の信号により、レンジサイドローブが生じるので、レンジサイドローブと遠距離に存在するターゲットからの反射波の信号のメインローブとが混在することがある。レーダ装置における遠距離に存在するターゲットの検出に関しては、検出精度が劣化することがある。
【0004】
従って、複数のターゲットに対して高分解能な測定が要求されるレーダ装置には、低いレンジサイドローブレベルとなる自己相関特性(以下、「低レンジサイドローブ特性」という)を有するパルス圧縮符号を用いたパルス波又はパルス変調波の送信が要求される。
【0005】
また、レーダ装置は、測定地点から同じ距離に自動車と歩行者とが存在すると、レーダ反射断面積(RCS: Radar cross section)の異なる自動車と歩行者とからの各反射波の信号が混合された信号を受信することがある。一般に、歩行者のレーダ反射断面積は自動車のレーダ反射断面積に比べると低い。
【0006】
このため、レーダ装置には、たとえ測定地点から同じ距離に自動車と歩行者とが存在していても、自動車だけでなく歩行者からの反射波の信号を適正に受信することが要求される。ターゲットの距離又は種別により、受信信号レベルとなる反射波の信号は変化する。レーダ装置は、様々な受信信号レベルとなる反射波の信号が受信可能な程度に、大きい受信ダイナミックレンジを有することが要求される。
【0007】
従来のレーダ装置の一例として、アンテナを機械的に走査し、又は狭角の指向性ビームを電子的に走査することによって、パルス波又はパルス変調波を送信し、ターゲットから反射された反射波を受信するものがある。
【0008】
一例のレーダ装置では、単一のアンテナにより電波を送受信するため、ターゲットの検出におけるアンテナの走査時間がかかる。このため、高速移動しているターゲットを検出するには、高分解能な測定が要求される分、多くの走査が必要となり、ターゲットの移動に追従して検出することが難しくなる。
【0009】
一方、従来のレーダ装置の他の一例として、ターゲットから反射された反射波の信号を複数のアンテナにより受信し、受信した各信号の位相を測定することで、アンテナごとのビームの指向性よりも高い分解能を用いて到来角を推定するものがある。
【0010】
他の一例のレーダ装置によれば、単一のアンテナを用いるレーダ装置に比べて、走査間隔を間引いて信号処理することで到来角の推定が可能であり、ターゲットの検出精度を向上することができる。また、ターゲットが高速移動しても、ターゲットの移動に追従して到来角を推定することができる。
【0011】
ここで、パルス幅Tpのパルス圧縮レーダにおける距離分解能ΔRは、一般的に、数式(1)によって示されることが知られている。パラメータCは、光速である。
【0012】
【数1】
【0013】
図22は、距離分解能ΔR内にパルス圧縮レーダからの角度方向が異なるターゲットが複数存在する方向推定結果の一例を示す説明図である。同図(a)は、複数のアンテナ(アレーアンテナ)を用いたパルス圧縮レーダと複数のターゲットとの配置関係を示す説明図である。同図(b)は、ターゲットAのみが存在する到来方向θに対する受信電力推定値を示す説明図である。同図(c)は、ターゲットA及びターゲットBが存在する到来方向θに対する受信電力推定値を示す説明図である。
【0014】
図22に示す様に、複数のアンテナを用いたパルス圧縮レーダが、パルス圧縮レーダの距離分解能ΔR以内に存在する複数のターゲットを測定すると、ターゲットの測距性能及び測角性能には、次に示す様な課題がある。
【0015】
測距性能において、複数のターゲットは、パルス圧縮レーダからの同一のレンジビン内に存在する。パルス圧縮レーダは、パルス圧縮処理において、各ターゲットからの反射波の信号が混合された信号を出力する。これにより、各ターゲットを分離して検出することが困難となる。
【0016】
測角性能において、複数のアンテナのビーム幅内程度に近接する方向に複数のターゲットが存在するので、複数のターゲットからの反射波の信号の相関性が高くなる。このため、各反射波の信号がベクトル合成された方向成分が出力される。これにより、各ターゲットを分離して検出することが困難となる。また、複数の各ターゲットに対する方向推定値が複数の各ターゲットの中間的な到来方向を示すことがある。この場合、方向推定精度が大きく劣化することがある。
【0017】
この様な課題に対し、高い相関性を有する複数のターゲットからの反射波の信号を信号分離し、各信号から信号到来方向を測角演算するものとして、例えば特許文献1が知られている。特許文献1のスーパーレゾリューションアンテナは、複数の素子アンテナにより受信信号をフーリエ変換し、フーリエ変換により生成されたドップラ周波数に応じたフィルタバンク毎の信号成分を重み付ける。更に、同スーパーレゾリューションアンテナは、重み付けされた信号成分から、所望のフィルタバンク成分のみを抽出し、抽出された素子アンテナの信号成分からターゲットの信号到来方向を推定する。
【0018】
これにより、距離分解能内に複数のターゲットが存在し、各ターゲットの相関性が高く、各ターゲットのドップラ周波数が十分に異なれば、各ターゲットからの受信信号を分離し、各ターゲットの到来方向を推定することができる。
【先行技術文献】
【特許文献】
【0019】
【特許文献1】特開2003−194919号公報
【発明の概要】
【発明が解決しようとする課題】
【0020】
しかしながら、特許文献1においては、重み付けされた信号成分をフィルタバンクにより抽出可能な程に、複数のターゲットからの各反射波の信号のドップラ周波数が異なることが必要となる。従って、距離分解能ΔR内にドップラ周波数がほぼ同一となる様な複数のターゲットからの各反射波の信号が存在すると、特許文献1に示すスーパーレゾリューションアンテナでは、複数のターゲットを分離して検出することが困難となる。
【0021】
本発明は、上述従来の事情に鑑みてなされたもので、距離分解能以内に複数のターゲットが存在し、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向及び距離の推定精度を向上するために、各ターゲットを分離して検出するレーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0022】
本発明は、上述したレーダ装置であって、パルス圧縮符号を高周波送信信号に変換し、前記高周波送信信号を送信アンテナから送信するレーダ送信部と、ターゲットにより反射された前記高周波送信信号である反射波の信号を用いてターゲットまでの到来時間及び到来方向を、前記パルス圧縮符号におけるパルス送信レートに対しN(整数)倍のサンプリングレートを用いて、推定するレーダ受信部と、を含み、前記レーダ受信部は、受信信号と前記パルス圧縮符号との相関値を出力する複数のアンテナ系統処理部と、前記複数のアンテナ系統処理部の各出力を基に、個別に前記ターゲットの到来時間及び到来方向を推定するN個の到来時間方向推定部と、前記N個の到来時間方向推定部での各推定結果に基づいて、前記高周波送信信号の距離分解能以内に存在する複数の前記ターゲットを、各ターゲットを分離して検出する高分解能処理部と、を含み、前記複数のアンテナ系統処理部は、それぞれ、前記反射波の信号を受信する受信アンテナと、前記受信された信号をベースバンドの受信信号に変換する受信RF部と、前記変換された受信信号を、前記N(整数)倍のサンプリングレートを用いてデジタルデータに変換するA/D変換部と、1/Nサンプルタイミング毎に前記変換された受信信号のデジタルデータと、前記送信パルス圧縮符号と、の相関値を演算するN個の相関値演算部と、を有する。
【発明の効果】
【0023】
本発明によれば、距離分解能以内に複数のターゲットが存在し、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向及び距離の推定精度を向上するために、各ターゲットを分離して検出することができる。
【図面の簡単な説明】
【0024】
【図1】相補符号の性質を説明する説明図、(a)一方の相補符号系列の自己相関演算結果を示す説明図、(b)他方の相補符号系列の自己相関演算結果を示す説明図、(c)2つの相補符号系列の自己相関演算結果の加算値を示す説明図
【図2】受信時のオーバーサンプルに基づく自己相関特性を説明する説明図、(a)送信される相補符号を用いたパルス圧縮符号のパルス幅Tpに対し、受信信号y(t)に対し2倍のサンプリングレートを用いてオーバーサンプルした自己相関特性を説明する説明図、(b)受信時に2倍のオーバーサンプルした結果のうちの奇数の離散サンプル値について自己相関特性を説明する説明図、(c)受信時に2倍のオーバーサンプルした結果のうちの偶数の離散サンプル値について自己相関特性を説明する説明図
【図3】第1の実施形態のレーダ装置の内部構成を簡略に示すブロック図
【図4】第1の実施形態のレーダ装置の内部構成を詳細に示すブロック図
【図5】高周波送信信号の送信区間と送信周期との関係を示す説明図
【図6】送信信号生成部の他の内部構成を詳細に示すブロック図
【図7】高周波送信信号の送信区間と送信周期と測定範囲との関係を示す説明図
【図8】高分解能処理部の内部構成を詳細に示すブロック図
【図9】推定結果と測定時間との関係を示す説明図
【図10】一致判定範囲と推定結果との関係を示す説明図
【図11】一致判定範囲の3つに分割された各ブロックの構成を示した説明図、(a)一致判定範囲に含まれる推定結果数が6つである構成を示した説明図、(b)一致判定範囲に含まれる推定結果数が8つである構成の一例を示した説明図、(c)一致判定範囲に含まれる推定結果数が8つである構成の他の一例を示した説明図
【図12】高分解能処理部の動作概要を説明する説明図、(a)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図、(b)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図、(c)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図
【図13】高分解能処理部の動作を説明するフローチャート
【図14】高分解能処理部の動作を説明するフローチャート
【図15】高分解能処理部の推定結果を模式的に示した説明図、(a)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅1.5Tpとした説明図、(b)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図、(c)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図、(d)ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図
【図16】第1の実施形態の変形例1のレーダ装置の高分解能処理部の推定結果を模式的に示した説明図
【図17】第1の実施形態の変形例2のレーダ装置の内部構成を詳細に示すブロック図
【図18】第1の実施形態の変形例2のレーダ装置の動作に関するタイミングチャート
【図19】第1の実施形態の変形例3のレーダ装置のレーダ受信部における第1アンテナ系統処理部の内部構成を詳細に示すブロック図
【図20】第1の実施形態の変形例3のレーダ装置のレーダ受信部における第1アンテナ系統処理部における各A/D変換部の動作に関するタイミングチャート
【図21】第1の実施形態の変形例4のレーダ装置のレーダ受信部の内部構成を詳細に示すブロック図
【図22】距離分解能ΔR内にパルス圧縮レーダからの角度方向が異なるターゲットが複数存在する方向推定結果の一例を示す説明図、(a)複数のアンテナ(アレーアンテナ)を用いたパルス圧縮レーダと複数のターゲットとの配置関係を示す説明図、(b)ターゲットAのみが存在する到来方向θに対する受信電力推定値を示す説明図、(c)ターゲットA及びターゲットBが存在する到来方向θに対する受信電力推定値を示す説明図
【発明を実施するための形態】
【0025】
本発明に係るレーダ装置の各実施形態を説明する前に、以下、後述の各実施形態の前提となる技術内容として、パルス圧縮処理、相補符号及び受信時のオーバーサンプルに基づく自己相関特性に関してそれぞれ簡単に説明する。
【0026】
(パルス圧縮処理)
先ず、パルス圧縮処理に関して説明する。例えば、上述した低レンジサイドローブ特性を有するパルス波又はパルス変調波として、Barker符号、M系列符号、相補符号の少なくとも1つを含むパルス圧縮符号を用いて高周波のレーダ送信信号を送信するパルス圧縮レーダが知られている。
【0027】
パルス圧縮とは、レーダ装置がパルス信号をパルス変調又は位相変調してパルス幅の広い信号(パルス圧縮符号)を用いて送信し、反射波の受信後の信号処理において受信信号を復調してパルス幅の狭い信号に変換(圧縮)して相関値を演算することである。このパルス圧縮によれば、受信電力を等価的に高め、ターゲットの探知距離を増大することができ、更に、探知距離に対する距離推定精度を向上することができる。
【0028】
(相補符号)
次に、相補符号に関して説明する。相補符号は、複数例えば2つの相補符号系列(an、bn)を用いて構成される符号である。相補符号は、一方の相補符号系列anと他方の相補符号系列bnの各自己相関演算結果において、遅延時間τ[秒]を一致させて各自己相関演算結果を加算することで、レンジサイドローブがゼロとなる性質を有する。なお、パラメータnはn=1,2,…,Lである。パラメータLは、符号系列長又は単に符号長を示す。
【0029】
相補符号の生成方法は、例えば下記参考非特許文献1に開示されている。
(参考非特許文献1)BUDISIN, S. Z,「NEW COMPLEMENTARY PAIRS OF SEQUENCES」,Electron. Lett., 26,(13), pp.881−883(1990)
【0030】
この様な相補符号の性質に関して、図1を参照して説明する。図1は、相補符号の性質を説明する説明図である。同図(a)は、一方の相補符号系列anの自己相関値演算結果を示す説明図である。同図(b)は、他方の相補符号系列bnの自己相関値演算結果を示す説明図である。同図(c)は、2つの相補符号系列(an,bn)の自己相関値演算結果の加算値を示す説明図である。なお、図1において用いた相補符号の符号長Lは128である。
【0031】
相補符号系列(an,bn)のうち一方の相補符号系列anの自己相関値演算結果は、数式(2)に従って演算される。他方の相補符号系列bnの自己相関値演算結果は、数式(3)に従って演算される。なお、パラメータRは自己相関値演算結果を示す。但し、n>L又はn<1では、相補符号系列an,bnはゼロとする(すなわち、n>L又はn<1において、an=0、bn=0)。なお、アスタリスク*は複素共役演算子を示す。
【0032】
【数2】
【0033】
【数3】
【0034】
数式(2)に従って演算された相補符号系列anの自己相関値演算結果Raa(τ)は、図1(a)に示す様に、遅延時間(あるいはシフト時間)τがゼロであるとピークが発生し、遅延時間τがゼロ以外では、レンジサイドローブが存在する。同様に、数式(3)に従って演算された相補符号系列bnの自己相関値演算結果Rbb(τ)は、図1(b)に示す様に、遅延時間τがゼロであるとピークが発生し、遅延時間τがゼロ以外では、レンジサイドローブが存在する。
【0035】
これらの自己相関値演算結果(Raa(τ),Rbb(τ))の加算値は、図1(c)に示す様に、遅延時間τがゼロのときにピークが発生し、遅延時間τがゼロ以外ではレンジサイドローブが存在せずにゼロになる。以下、遅延時間τがゼロであると発生するピークを「メインローブ」という。この関係を数式(4)に示す。なお、図1(a)〜(c)の横軸は自己相関値演算における遅延時間(τ)を示し、縦軸は演算された自己相関値演算結果を示す。
【0036】
【数4】
【0037】
近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信するには、一般的に、パルス圧縮された符号の符号長が長いほど、所要の受信ダイナミックレンジが大きくなることが知られている。
【0038】
相補符号では、上述した自己相関特性から、より短い符号長によってピークサイドローブレベルを低減できる。このため、短い符号長を用いる相補符号では、近距離に存在するターゲットと遠距離に存在するターゲットとからの反射波が混合された信号を受信しても、受信ダイナミックレンジを低減することができる。
【0039】
また、符号長LのBarker符号、M系列符号を用いることで、ピークサイドローブ比は20log10(1/L)[dB]によって与えられ、符号長Lを長くすることで、優れた低レンジサイドローブ特性が得られる。
【0040】
(受信時のオーバーサンプルに基づく自己相関特性)
次に、受信時のオーバーサンプル(所定倍のサンプリングレートによるサンプリング)に基づく自己相関特性に関して図2を参照して説明する。図2は、受信時のオーバーサンプルに基づく自己相関特性を説明する説明図である。なお、以下の説明において、パラメータTp[秒]は、相補符号を用いたパルス圧縮符号の送信時におけるパルス(送信時間)幅、単にパルス幅を示す。
【0041】
同図(a)は、送信される相補符号を用いたパルス圧縮符号(送信符号)のパルス幅Tpに対し、受信信号y(t)に対し2倍のサンプリングレート(=2/Tp)を用いてオーバーサンプルした自己相関特性を説明する説明図である。
【0042】
自己相関演算は、数式(5)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y((kTp/2)+t0)と、送信した符号長Lの相補符号系列anをパルス幅に対し2倍のサンプリングレートでサンプルした信号aasとの相関演算となる。ここで、パラメータS=1,…,2Lであり、aa2n−1=an、aa2n=anである。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0043】
【数5】
【0044】
同図(b)は、受信時に2倍のオーバーサンプルした結果のうちの奇数の離散サンプル値について自己相関特性を説明する説明図である。
【0045】
自己相関演算は、数式(6)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y(kTp/2+t0)のうちの奇数の離散サンプル値と、送信した符号長Lの相補符号系列anをパルス幅に対し1倍のサンプリングレートでサンプルした信号anと、の相関演算となる。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0046】
【数6】
【0047】
同図(c)は、受信時に2倍のオーバーサンプルした結果のうちの偶数の離散サンプル値についての自己相関特性を説明する説明図である。
【0048】
自己相関演算は、数式(7)で示す様に、パルス幅に対し2倍のサンプリングレートでサンプルされた受信信号y(kTp/2+t0)のうちの偶数の離散サンプル値と、送信した符号長Lの相補符号系列anをパルス幅に対し1倍のサンプリングレートでサンプルした信号anと、の相関演算となる。なお、時刻t0はターゲット反射波が到来するタイミングである。
【0049】
【数7】
【0050】
図2において、ターゲットからの反射波の信号の到来タイミングが、受信時のサンプルタイミングと一致する。隣接する離散時間、即ちサンプルタイミングがTp/2となり、図2(a)に示す様に、自己相関値がゼロとならないサンプルタイミングが3つ現れる。以下、図2(a)に示す様に、隣接するサンプルタイミングにおいて自己相関値がゼロとならない範囲を「相関広がり範囲」と定義する。
【0051】
従って、図2(a)に示す様に、受信時に所定倍(例えば、パルス幅Tpに対し、2倍のサンプリングレート)によるオーバーサンプルリングにより、自己相関値のピークの前後に自己相関値がゼロとならないサンプルタイミングが存在する。即ち、図2(a)においては、自己相関値のピーク周辺にレンジサイドローブが発生したと見なすことができる。
【0052】
自己相関値のピークが得られる時間から遅延時間±Tp/2の受信時の離散サンプル値の影響を受けることになる。レーダ装置の距離分解能ΔR以内の距離であるΔR/2に複数のターゲットが存在すると、各ターゲットにより反射された反射波の信号が一部遅れて受信され、上記のレンジサイドローブにより各ターゲットの自己相関値が加算され、複数のターゲットに対する測角推定性能が劣化することになる。
【0053】
一方、図2(b)には、ターゲットからの反射波の信号の到来タイミングが受信時のサンプルタイミングと一致した自己相関特性が示されている。図2(a)に示す自己相関演算結果とは異なり、隣接する離散時間、即ちサンプルタイミングがTpであると、図2(b)に示す様に、自己相関値がゼロとならないサンプルタイミングは1つだけ存在する。
【0054】
従って、図2(b)の自己相関演算結果では、実際には2倍のサンプリングレートを用いてオーバーサンプルしていても、遅延時間±Tp/2の受信時の離散サンプル値の影響を受けることにならない。レーダ装置の距離分解能ΔR以内に複数のターゲットが存在しても、各ターゲットにより反射された反射波の信号が一部遅れて受信されるが、複数のターゲットに対する測角推定性能が劣化することにならない。
【0055】
また、図2(c)には、ターゲットからの反射波の信号の到来タイミングが受信時のサンプルタイミングと一致しない自己相関特性が示されている。図2(c)に示されたサンプルタイミングと図2(b)に示されたサンプルタイミングとは、離散時間Tp/2ほどずれている。
【0056】
ここで、図2(b)に示された奇数の離散サンプル値のサンプルタイミングと、ターゲットにより反射された反射波の信号の到来タイミングとが一致するとする。図2(c)に示す様に、図2(b)に示す自己相関演算結果とは異なり、隣接する離散時間Tp離れたサンプルタイミングにおいて自己相関値がゼロとならないサンプルタイミングは2つ存在する。
【0057】
従って、図2(c)の自己相関演算結果では、遅延時間±Tp/2の受信時のサンプル値の影響を受けることになる。レーダ装置の距離分解能ΔR以内の距離であるΔR/2において複数のターゲットが存在するため、上記のレンジサイドローブにより各ターゲットの自己相関値が加算され、各ターゲットにより反射された反射波の信号が一部遅れて受信され、複数のターゲットに対する測角推定性能が劣化することになる。
【0058】
上述した説明は、図2(b)に示す受信時のサンプルタイミングとターゲットからの反射波の信号の到来タイミングとが一致し、更に、図2(c)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致しないことを前提としている。
【0059】
反対に、図2(c)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致し、更に図2(b)に示す受信時のサンプルタイミングと反射波の信号の到来タイミングとが一致しないと想定する。
【0060】
この場合では、図2(b)に示す自己相関演算結果では遅延時間±Tp/2の受信時のサンプル値の影響を受け、図2(c)に示す自己相関演算結果では遅延時間±Tp/2の受信時のサンプル値の影響を受けない。
【0061】
(本発明の各実施形態)
次に、本発明の実施形態について、図面を参照して説明する。本発明に係るレーダ装置は、図2(b)及び図2(c)に示した様に、送信される相補符号を用いたパルス圧縮符号(送信符号)のパルス幅Tpに対し、受信時に例えば2倍のオーバーサンプルした相関値特性(相関値演算結果)を用いる。更に、本発明に係るレーダ装置は、レーダ装置の距離分解能以内に複数のターゲットが存在しても、相関値演算結果に基づいて各ターゲットからの反射波の信号を分離することで、各ターゲットを検出する。
【0062】
また、以下の説明において、本発明に係るレーダ装置は、ターゲットからの反射波の信号を受信する複数の受信アンテナを有する。例えば4つの受信アンテナ(アレーアンテナ)を有する構成を例に示すがこれに限定されない。
【0063】
〔第1の実施形態〕
第1の実施形態のレーダ装置1の構成及び動作について、図3〜図14を参照して説明する。図3は、第1の実施形態のレーダ装置の内部構成を簡略に示すブロック図である。図4は、第1の実施形態のレーダ装置1の内部構成を詳細に示すブロック図である。図5は、高周波送信信号の送信区間Twと送信周期Trとの関係を示す説明図である。図6は、送信信号生成部4rの他の内部構成を詳細に示すブロック図である。
【0064】
図7は、高周波送信信号の送信区間Twと送信周期Trと測定範囲との関係を示す説明図である。図8は、高分解能処理部26の内部構成を詳細に示すブロック図である。図9は、推定結果DOUTp(q,m)と離散時刻(p,q)との関係を示す説明図である。
【0065】
図10は、一致判定範囲と推定結果DOUTp(q,m)との関係を示す説明図である。図11は、一致判定範囲の3つに分割された各ブロックの構成を示した説明図である。同図(a)は、一致判定範囲に含まれる推定結果数が6つである構成を示した説明図である。同図(b)は、一致判定範囲に含まれる推定結果数が8つである構成の一例を示した説明図である。同図(c)は、一致判定範囲に含まれる推定結果数が8つである構成の他の一例を示した説明図である。
【0066】
図12は、高分解能処理部26の動作概要を説明する説明図である。同図(a)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図である。同図(b)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図である。同図(c)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図である。
【0067】
図13及び図14は、高分解能処理部26の動作を説明するフローチャートである。
【0068】
第1の実施形態のレーダ装置1は、レーダ送信部2により生成された高周波送信信号を送信アンテナAN1から送信(発射)する。レーダ装置1は、送信された高周波送信信号がターゲットにより反射された反射波の信号を、例えば図4に示す様な4つの受信アンテナAN2a〜AN2d(不図示、以下同様)により受信する。レーダ装置1は、各受信アンテナAN2a〜AN2dにより受信された信号を信号処理することで、ターゲットの有無を検出する。
【0069】
なお、ターゲットはレーダ装置1が検出する対象の物体であり、例えば自動車又は人を含み、以下の各実施形態においても同様である。
【0070】
先ず、レーダ装置1の各部の構成について簡略に説明する。
【0071】
レーダ装置1は、図3に示す様に、レーダ送信部2及びレーダ受信部3を備える。レーダ送信部2は、送信信号生成部4、及び、送信アンテナAN1と接続される送信RF部5を有する。なお、レーダ送信部2及びレーダ受信部3は、共に基準信号発振器Loに接続され、基準信号発振器Loから信号が供給され、レーダ送信部2及びレーダ受信部3の処理の同期が揃うようになっている。
【0072】
レーダ受信部3は、D個のアンテナ系統処理部11−1〜11−D、N個の到来時間方向推定部24−1〜24−N、及び高分解能処理部26を有する。パラメータD、パラメータNは、共に2以上の整数である。各アンテナ系統処理部は同様の構成を有し、以下の説明においては、アンテナ系統処理部11−1を例示して説明する。
【0073】
アンテナ系統処理部11−1は、受信アンテナAN2と接続される受信RF部12、A/D変換部17、N個の相関値演算部20−1〜20−Nを少なくとも有する。
【0074】
(レーダ送信部)
次に、レーダ送信部2の各部の構成について詳細に説明する。以下、レーダ送信部2の各部の構成について図4を参照して説明する。
【0075】
レーダ送信部2は、図4に示す様に、送信信号生成部4、及び、送信アンテナAN1が接続された送信RF部5を備える。
【0076】
送信信号生成部4は、図4に示す様に、符号生成部6、変調部7、及びLPF(Low Pass Filter)8を備える。なお、図4では、送信信号生成部4はLPF8を含む様に構成されているが、LPF8は、送信信号生成部4と独立してレーダ送信部2の中に構成されても良い。
【0077】
送信RF部5は、図4に示す様に、周波数変換部9、及び増幅器10を備える。
【0078】
次に、レーダ送信部2の各部の動作について詳細に説明する。
【0079】
送信信号生成部4は、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。送信信号生成部4の各部は、生成された信号に基づいて動作する。
【0080】
送信信号生成部4は、符号長Lの符号系列anを変調し、数式(8)に示すベースバンドの送信信号r(k、M)(パルス圧縮符号とも言う)を周期的に生成する。ここで、パラメータn=1,・・・,Lであり、パラメータLは、符号系列anの符号長を表す。パラメータjは、j2=−1を満たす虚数単位である。パラメータkは、k=1〜(Nr+Nu)を満たす離散時刻である。離散時刻kの範囲は、後述の各実施形態においても同様である。
【0081】
数式(8)に示されたベースバンドの送信信号r(k、M)は、第M番目の送信周期Trの離散時刻kにおける送信信号を示し、同相信号成分Ir(k、M)と、虚数単位jが乗算された直交信号成分Qr(k、M)との加算結果で示される。
【0082】
【数8】
【0083】
また、送信信号生成部4により生成される送信信号は、連続的な信号ではない。図5に示す様に、例えば各送信周期Trの送信区間Tw[秒]では、符号長Lの符号系列anに対して、1つのパルス符号あたりNo[個]のサンプルが存在する。従って、送信区間Twにおいては、Nr(=No×L)のサンプルが含まれる。また、各送信周期Trの非送信区間(Tr−Tw)[秒]では、ベースバンドの送信信号としてNu[個]のサンプルが存在する。
【0084】
符号生成部6は、送信周期Tr毎に、符号長Lの符号系列anのパルス圧縮用の送信符号を生成する。この送信符号は、例えば、上述した相補符号のペアを構成する符号系列、Barker符号系列又はM系列符号の少なくとも1つを含む符号であることが好ましい。
【0085】
符号生成部6は、生成された符号系列anの送信符号を変調部7に出力する。以下、符号系列anの送信符号を、便宜的に送信符号anと記載する。
【0086】
更に、符号生成部6は、或る送信周期Trにおいて、送信符号anとして相補符号のペアを生成するには、2つの送信周期を用いて、各送信周期毎に交互にペアとなる符号Pn,Qnをそれぞれ生成する。すなわち、第M番目の送信周期(Tr)において、パルス圧縮符号an(M)として符号Pnを送信し、続く第(M+1)番目の送信周期(Tr)ではパルス圧縮符号an(M+1)として、符号Qnを送信する。これ以後、第(M+2)番目以降の送信周期では、第M番目の送信周期及び第(M+1)の2つの送信周期を一つの単位として、同様に、繰り返し符号Pn,Qnを生成する。
【0087】
変調部7は、符号生成部6により出力された送信符号anを入力する。変調部7は、入力された送信符号anをパルス変調することで、数式(8)に示されるベースバンドの送信信号r(k,M)を生成する。なお、パルス変調とは、振幅変調、ASK(Amplitude Shift Keying))又は位相変調(PSK(Phase Shift Keying)である。また、変調部7は、LPF8を介して、生成された送信信号r(k,M)のうち予め設定された制限帯域以下の送信信号r(k,M)を送信RF部5に出力する。
【0088】
送信RF部5は、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍数に逓倍した信号を生成する。送信RF部5は、生成された信号に基づいて動作する。
【0089】
周波数変換部9は、送信信号生成部4により生成された送信信号r(k,M)を入力し、入力されたベースバンドの送信信号r(k,M)をアップコンバートしてキャリア周波数帯域の高周波送信信号を生成する。周波数変換部9は、生成された高周波送信信号を増幅器10に出力する。
【0090】
増幅器10は、出力された高周波送信信号を入力し、入力された高周波送信信号のレベルを所定のレベルに増幅して送信アンテナAN1に出力する。この増幅された高周波送信信号は、送信アンテナAN1を介して空間に放射する様に送信される。
【0091】
送信アンテナAN1は、送信RF部5により出力された高周波送信信号を空間に放射する様に送信する。図5に示す様に、高周波送信信号は、送信周期Trのうち送信区間Twの間に送信され、非送信区間(Tr−Tw)の間には送信されない。
【0092】
なお、送信RF部5、及び各アンテナ系統処理部11a〜11dの受信RF部12a〜12d(不図示、以下同様)には、基準信号発振器Loにより生成されたリファレンス信号が所定倍に逓倍された信号が共通に供給されている。これにより、各送信RF部5及び受信RF部12a〜12d間の同期を確立することができる。
【0093】
なお、上述した符号生成部6を送信信号生成部4に設けず、図6に示す様に、送信信号生成部4により生成された送信符号anを予め記憶する送信符号記憶部CMを設けても良い。更に、送信信号生成部4により相補符号が生成されるには、相補符号のペア、例えば、送信符号an及びbnが共に送信符号記憶部CMに記憶されることが好ましい。
【0094】
なお、図6に示した送信符号記憶部CMは、第1の実施形態に限らず、後述の各実施形態にも同様に適用することができる。図6に示す様に、送信信号生成部4rは、送信符号記憶部CM、送信符号制御部CT3、変調部7r、及びLPF8rを含む構成である。
【0095】
図6において、送信符号制御部CT3は、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に基づいて、送信周期Tr毎に、送信符号an(又は相補符号を構成する送信符号an,送信符号bn)を、送信符号記憶部CMから巡回的に読み出して変調部7rに出力する。変調部7rに出力された以降の動作は上述した変調部7及びLPF8と同様のため、動作の説明は省略する。
【0096】
(レーダ受信部)
次に、レーダ受信部3の各部の構成について説明する。レーダ受信部3には、複数の例えば4つのアレーアンテナが構成されている。以下、レーダ受信部3の各部の構成について図4を参照して説明する。図4に示すレーダ受信部3は、アンテナ系統処理部の個数が4で、相関値演算部及び到来時間方向推定部の個数が2である。
【0097】
レーダ受信部3は、図4に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11a〜11d、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26を備える。以下の説明においては、4つのアンテナ系統処理部11a〜11dの各部の構成及び動作は同様であるため、アンテナ系統処理部11aを例示して説明し、後述の各実施形態においても同様である。
【0098】
アンテナ系統処理部11aは、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13aを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13aは、A/D変換部17a,18a、S/P変換部19a、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。レーダ受信部3は、各送信周期Trを信号処理部13a〜13d(不図示、以下同様)における信号処理区間として周期的に演算する。
【0099】
高分解能処理部26は、図8に示す様に、受信信号レベル判定部27、一致判定範囲抽出部28及び一致判定部29を備える。
【0100】
次に、レーダ受信部3の各部の動作について説明する。
【0101】
受信アンテナAN2aは、レーダ送信部2により送信された高周波送信信号がターゲットにより反射された反射波の信号を受信する。受信アンテナAN2により受信された受信信号は、受信RF部12aに出力される。
【0102】
受信RF部12aは、送信RF部5と同様に、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。受信RF部12aは、生成された信号に基づいて動作する。
【0103】
増幅器14aは、受信アンテナAN2aにより受信された高周波帯域の受信信号を入力し、入力された受信信号のレベルを増幅して周波数変換部15aに出力する。
【0104】
周波数変換部15aは、増幅器14aにより出力された高周波帯域の受信信号を入力し、入力された高周波帯域の受信信号をベースバンドにダウンコンバートし、ダウンコンバートされた受信信号を直交検波部16aに出力する。
【0105】
直交検波部16aは、周波数変換部15aにより出力されたベースバンドの受信信号を直交検波することで、同相信号(In-phase signal)及び直交信号(Quadrate signal)を用いて構成されるベースバンドの受信信号を生成する。直交検波部16aは、生成された受信信号のうち、同相信号をA/D変換部17aに出力し、生成された受信信号のうち、直交信号をA/D変換部18aに出力する。
【0106】
A/D変換部17aは、直交検波部16aにより出力されたベースバンドの同相信号を離散時刻kによってサンプリングし、アナログデータの同相信号をデジタルデータに変換する。A/D変換部17aは、変換されたデジタルデータの同相信号成分を、S/P変換部19aに出力する。
【0107】
A/D変換部17aは、レーダ送信部2により生成される送信信号r(k、M)を、1つのパルス幅(パルス時間)Tp(=Tw/L)あたりNs[個]によって、サンプリングする。A/D変換部17aのサンプリングレートは、Nsとなる。
【0108】
同様に、A/D変換部18aは、直交検波部16aにより出力されたベースバンドの直交信号を離散時刻kによってサンプリングし、アナログデータの直交信号をデジタルデータに変換する。A/D変換部18aは、変換されたデジタルデータの直交信号成分を、S/P変換部19aに出力する。
【0109】
A/D変換部18aは、レーダ送信部2により生成される送信信号r(k、M)を、1つのパルス幅(パルス時間)Tp(=Tw/L)あたりNs[個]によって、サンプリングする。A/D変換部18aのサンプリングレートは、Nsとなる。図4には、A/D変換部17a及びA/D変換部18aの各サンプリングレートNsが2であるレーダ受信部3の構成が示されている。
【0110】
また、A/D変換部17a,18aにより変換された第M番目の送信周期Trの離散時刻kにおける受信信号は、受信信号の同相信号成分I(k、M)及び受信信号の直交信号成分Q(k、M)を用いて、数式(9)の複素信号x(k、M)として表される。以下の各実施形態においても同様である。
【0111】
【数9】
【0112】
ここで、離散時刻k=1は、各送信周期Trの開始時点を示す。また、離散時刻k=Nr×(Ns/No)は、各送信周期Trにおける送信区間Twの終了時点を示す。更に、離散時刻k=(Nr+Nu)×(Ns/No)は、各送信周期Trの終了直前時点を示す。
【0113】
S/P変換部19aは、A/D変換部17a及びA/D変換部18aによりそれぞれ出力されたデジタルデータの同相信号成分及び直交信号成分を入力する。S/P変換部19aは、A/D変換部17a,18aのサンプリングレートNsに応じて、入力された同相信号成分及び直交信号成分からなる複素数x(k,M)の出力を、離散時刻毎に順次切り換える。なお、本発明の各実施形態においては、パラメータNs=2を例示して説明しているため相関値演算部は2つ設けられているが、パラメータNsは2に限定されない。
【0114】
具体的には、S/P変換部19aは、離散時刻kにおける複素数x(k,M)を、第{mod(k−1,Ns)+1}番目の相関値演算部に出力する。これにより、第1から第Nsまでの相関値演算部に入力される複素数(以下、離散サンプル値と表記する)x(k,M)は、1パルス当たりのサンプリングレートが1となり、サンプルタイミングがTp/Ns=(Tw/L)/Nsずつシフトしたものとなる。なお、mod(k−1,Ns)は、(k−1)がNsを用いて除算された余りを出力する演算子である。
【0115】
以下の説明において、S/P変換部19aから第p番目の相関値演算部への出力された離散サンプル値を、yp(q,M)と表記する。パラメータpは、p=1,…,Nsである。パラメータqは、q=1,…,(Nr+Nu)/Noである。
【0116】
第1相関値演算部20aは、S/P変換部19aにより出力された離散サンプル値yp(q,M)を入力する。第1相関値演算部20aは、送信信号生成部4の動作と同期を確立することで、送信信号生成部4と同様に、基準信号発振器Loにおいて生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。なお、図4では、第1相関値演算部20aへのリファレンス信号の入力は省略している。
【0117】
第1相関値演算部20aは、リファレンス信号を所定倍に逓倍された信号に基づいて、離散時刻qに応じて、第M番目の送信周期Trにおいて送信する符号長Lのパルス圧縮符号an(M)を周期的に生成する。ここで、パラメータn=1,…,Lである。
【0118】
また、第1相関値演算部20aは、入力された離散サンプル値yp(q,M)と、パルス圧縮符号an(M)との第1相関値ACp(q,M)を演算する。このパラメータACp(q,M)は、離散時刻qにおける第1相関値を示す。この第1相関値演算部20aにより演算された第1相関値ACp(q,M)において、パラメータpはp=1である。
【0119】
具体的には、第1相関値演算部20aは、図7に示す各送信周期Tr、即ち離散時刻q=1〜(Nr+Nu)/Noにおいては、数式(10)に従って第1相関値ACp(q,M)を演算する。第1相関値演算部20aは、数式(10)に従って演算された第1相関値ACp(q,M)を加算処理部22aに出力する。パラメータuは遅延時間を示す。
【0120】
図7の第1段は、高周波送信信号の送信タイミングを示し、第2段は、反射波の受信タイミングを示す。反射波は、送信区間Twの間に送信された高周波送信信号が、ターゲットにより反射された波である。
【0121】
【数10】
【0122】
第2相関値演算部21aは、S/P変換部19aにより出力された離散サンプル値yp(q,M)を入力する。第2相関値演算部21aは、送信信号生成部4の動作と同期を確立することで、送信信号生成部4と同様に、基準信号発振器Loにおいて生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。なお、図4では、第2相関値演算部21aへのリファレンス信号の入力は省略している。
【0123】
第2相関値演算部21aは、リファレンス信号を所定倍に逓倍された信号に基づいて、離散時刻qに応じて、第M番目の送信周期Trにおいて送信する符号長Lのパルス圧縮符号an(M)を周期的に生成する。ここで、n=1,…,Lである。
【0124】
また、第2相関値演算部21aは、入力された離散サンプル値yp(q,M)と、パルス圧縮符号an(M)との第2相関値ACp(q,M)を演算する。このパラメータACp(q,M)は、離散時刻qにおける第2相関値を示す。この第2相関値演算部21aにより演算された第2相関値ACp(q,M)において、パラメータpはp=2である。
【0125】
具体的には、第2相関値演算部21aは、図7に示す各送信周期Tr、即ち離散時刻q=1〜(Nr+Nu)/Noにおいては、数式(10)に従って第2相関値ACp(q,M)を演算する。第2相関値演算部21aは、数式(10)に従って演算された第2相関値ACp(q,M)を加算処理部23aに出力する。
【0126】
第1相関値演算部20a及び第2相関値演算部21aの各演算は、離散時刻q=1〜(Nr+Nu)/Noにおいて実行される。なお、レーダ装置1の測定対象となるターゲットの存在範囲によって、測定レンジ(qの範囲)を、例えばq=(L+1)〜{((Nr+Nu)/No)−L}の様に更に狭めた限定をしてもよい。
【0127】
図7の第2段に示す様に、離散時刻q=(L+1)は、送信区間Twの終了時刻の次の離散時刻を示す。更に、離散時刻q=(L+1)は、反射波の信号が、離散時刻q=0より遅延時間τ1ほど遅れて開始される受信の開始時刻である。この遅延時間τ1は、数式(11)により示される。
【0128】
【数11】
【0129】
更に、図7の第2段に示す様に、離散時刻q={((Nr+Nu)/No)−L}は、送信周期Trの終了時刻から送信区間Tw(=Tp×L)前の時刻に相当する。更に、離散時刻q={((Nr+Nu)/No)−L}は、反射波の信号が、離散時刻q=0より遅延時間τ2ほど遅れて開始される受信の開始時刻である。この遅延時間τ2は、数式(12)により示される。
【0130】
【数12】
【0131】
従って、第1相関値演算部20a及び第2相関値演算部21aは、少なくとも離散時刻q=(L+1)〜{((Nr+Nu)/No)−L}の範囲において上述した数式(10)に示す第1相関値及び第2相関値を演算しても良い。これにより、レーダ装置1は、第1相関値演算部20a及び第2相関値演算部21aの演算量を低減することができる。即ち、レーダ装置1は、信号処理部13aによる演算量の削減に基づく消費電力量を低減することができる。他のアンテナ系統処理部11b〜11dに関しても同様である。
【0132】
更に、レーダ装置1は、高周波送信信号の送信区間Twにおいて測定せず、高周波送信信号がレーダ受信部3に直接的に回り込んだとしても、回り込みによる影響を排除して測定することができる。この測定レンジ(離散時刻qの範囲)を限定することで、後述する第1加算処理部22a、第2加算処理部23a、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26の動作も同様の測定レンジに限定した範囲となる。
【0133】
第1加算処理部22aは、第1相関値演算部20aにより出力された第1相関値ACp(q,M)を入力する。第1加算処理部22aは、第M番目の送信周期Trにおいて乗算された第1相関値ACp(q,M)を単位として、複数R回、加算平均する。パラメータRは自然数である。
【0134】
即ち、第1加算処理部22aは、第m番目の送信周期Trにおける第1相関値ACp(q,m)から第(m+R−1)番目の送信周期Trにおける第1相関値ACp(q,m+R−1)を単位として、離散時刻qのタイミングを揃えて平均第1相関値aveACp(q,M)を演算する。この平均第1相関値aveACp(q,M)においては、パラメータpはp=1である。第1加算処理部22aは、演算された平均相関値aveACp(q,M)を第1到来時間方向推定部24に出力する。なお、パラメータmは、ゼロを含む自然数Rの倍数である。
【0135】
第2加算処理部23aは、第2相関値演算部21aにより出力された第2相関値ACp(q,M)を入力する。第2加算処理部23aは、第M番目の送信周期Trにおいて乗算された第2相関値ACp(q,M)を単位として、複数R回、加算平均する。
【0136】
即ち、第2加算処理部23aは、第m番目の送信周期Trにおける第2相関値ACp(q,m)から第(m+R−1)番目の送信周期Trにおける第2相関値ACp(q,m+R−1)を単位として、離散時刻qのタイミングを揃えて平均第2相関値aveACp(q,M)を演算する。この平均第2相関値aveACp(q,M)においては、パラメータpはp=2である。第2加算処理部23aは、演算された平均相関値aveACp(q,M)を第2到来時間方向推定部25に出力する。
【0137】
これらの第1加算処理部22a及び第2加算処理部23aの動作により、レーダ装置1は、雑音成分を更に抑圧することで、SNR(Signal Noise Ratio)を向上することができる。更に、レーダ装置1は、ターゲットの到来距離の推定に関する測定性能を向上することができる。
【0138】
第1到来時間方向推定部24は、各アンテナ系統処理部11a〜11dの各第1加算処理部22a〜22d(不図示、以下同様)により出力された各平均相関値aveACp(q,M)を入力する。第1到来時間方向推定部24は、4つの受信アンテナを用いて各アンテナ系統処理部により演算された各平均相関値aveACp(q,M)に基づいて、ターゲットからの反射波の受信電力を推定し、推定結果に基づき到来時間を測定する。さらに離散時刻q毎に、複数の受信アンテナによるレーダ測定ターゲットの受信位相差を基にして、レーダ装置1からターゲットまでの到来方向を推定演算する。
【0139】
この推定演算の結果(推定結果)には、最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第1到来時間方向推定部24は、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。
【0140】
なお、第1到来時間方向推定部24によるターゲットまでの到来方向の推定演算は、既に公知の技術であり、例えば下述参考非特許文献2を参照することにより実現することが可能である。
【0141】
(参考非特許文献2)JAMES A. Cadzow、「Direction of Arrival Estimation Using Signal Subspace Modeling」、IEEE、Vol.28、pp.64−79(1992)
【0142】
第2到来時間方向推定部25は、各アンテナ系統処理部11a〜11dの各第2加算処理部23a〜23d(不図示、以下同様)により出力された各平均相関値aveACp(q,M)を入力する。第2到来時間方向推定部25は、4つの受信アンテナを用いて各アンテナ系統処理部により演算された各平均相関値aveACp(q,M)に基づいて、ターゲットからの反射波の受信電力を推定し、推定結果に基づき到来時間を測定する。さらに離散時刻q毎に、レーダ装置1からターゲットまでの到来方向を推定演算する。
【0143】
同様に、この推定演算の結果(推定結果)には、最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第2到来時間方向推定部25は、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。
【0144】
なお、第2到来時間方向推定部25によるターゲットまでの到来方向の推定演算は、既に公知の技術であり、例えば上述参考非特許文献2を参照することにより実現することが可能である。
【0145】
高分解能処理部26は、第1到来時間方向推定部24a及び第2到来時間方向推定部25aにより出力された各推定結果[POWp(q,m),DOAp(q,m)]を入力する。高分解能処理部26の動作の説明においては、図13及び図14を参照して説明する。
【0146】
受信信号レベル判定部27は、入力された各推定結果[POWp(q,m),DOAp(q,m)]のうち、受信電力推定結果POWp(q,m)が所定の受信信号レベルLc以上であるかを判定する(S11)。所定の受信信号レベルLcは、所定のターゲット検出率を上回り、かつ、ターゲットの誤検出率を下回る受信SNRに設定することが好ましい。即ち、パラメータp及びqによって定まる離散時刻(p,q)のうち、数式(13)を満たす離散時刻(r,s)である推定結果DOUTr(s,m)を一致判定範囲抽出部28に出力する(S11)。ここで、パラメータp及びqによって定める離散時刻は、測定時間又はサンプルタイミングと呼んでも良い。
【0147】
【数13】
【0148】
一致判定範囲抽出部28は、受信信号レベル判定部27により出力された推定結果DOUTr(s,m)を入力する。一致判定範囲抽出部28は、各離散時刻(r,s)の前後の測定時刻に相当するサンプリングレートNsに応じた所定の時間範囲、具体的には相関広がり範囲(2Ns−1)の2倍の個数に相当する各推定結果DOAp(q,m)のうち、DOUTr(s,m)として抽出されたものの集合を、一致判定範囲の単位として一致判定部29に出力する(S12)。
【0149】
この一致判定範囲抽出部28により出力される一致判定範囲の単位に相当する各推定結果の集合は、図9に示した各推定結果の順序によって抽出される。
【0150】
また、一致判定範囲抽出部28は、一致判定範囲の単位の個数分の各推定結果の集合を、相関広がり範囲(2Ns−1)に応じてceil[(2Ns−1)/2]ずつシフトしたものを更に抽出する(S13)。以下、一致判定範囲抽出部28によりw番目に抽出された一致判定範囲の各推定結果を、DOUT_SEL(w)と表記する。
【0151】
更に、一致判定範囲抽出部28は、抽出を、送信周期Trにおける離散時刻の終了時までの離散サンプル値に対する推定結果DOUTNs((Nr+Nu)/No,m)まで繰り返す(S13)。同様に、これらの抽出された各一致判定範囲は、一致判定部29に出力される。
【0152】
なお、ceil[(2Ns−1)/2]は、(2Ns−1)/2の小数点以下を整数値に切り上げるための演算子である。例えば、Ns=2では、ceil[(2Ns−1)/2]=ceil[1.5]となり、一致判定範囲抽出部28により一致判定範囲の抽出には、各推定結果が2つシフトされることになる。
【0153】
この抽出された各一致判定範囲の単位に相当する各推定結果の集合は、図10に示される。図10には、Ns=2である第w番目、第(w+1)番目及び第(w+2)番目の一致判定範囲が、それぞれ示されている。パラメータwは自然数である。
【0154】
更に、一致判定範囲抽出部28は、ステップS13により抽出された一致判定範囲の単位に相当する各推定結果の集合を、例えば3つのブロック(B1,B2,B3)に分割する(S14)。この各推定結果が分割された例が、図11に示されている。例えば、均等に3分割することが困難なので、図11(b)及び図11(c)に示す様に、中心となるブロックB2に多くの各推定結果が含まれる様に分割されることが好ましい。
【0155】
ステップS15以降の動作は、一致判定部29の動作であり、ステップS12及びS13により抽出されたDOUT_SEL(w)に対して行われる動作である。
【0156】
一致判定部29は、一致判定範囲抽出部28により出力された第w番目の一致判定範囲DOUT_SEL(w)に含まれる各推定結果の集合を用いて、レーダ装置1からターゲットへの到来方向推定結果の一致性を判定する。更に、一致判定部29は、ステップS12及びS13により抽出された或る送信周期Trにおける全ての一致判定範囲に対してステップS15の動作を繰り返す。以下、ステップS15の動作の詳細について説明する。
【0157】
一致判定部29は、第w番目の一致判定範囲DOUT_SEL(w)に含まれ、且つ、数式(10)を満たす各推定結果のうち、最大の受信電力推定結果(POWp_peak(q_peak,m))を含む推定結果を選択する(S15−1)。一致判定部29は、選択された推定結果の最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)が、ステップS14により分割された中心のブロックB2の各推定結果における離散時刻であるか否かを判定する(S15−2)。
【0158】
中心のブロックB2の各推定結果における離散時刻でないと判定されたとする(S15−2、NO)。一致判定部29は、第w番目の一致判定範囲DOUT_SEL(w)に対する動作を終了し、次の第(w+1)番目の一致判定範囲DOUT_SEL(w+1)に対してステップS15の動作を行う(S15−4)。
【0159】
中心のブロックB2の各推定結果における離散時刻であると判定されたとする(S15−2、YES)。一致判定部29は、測定時間(p_peak,q_peak)の到来方向推定結果DOAp_peak(q_peak,m)と時間的に連続する前後の離散時刻の離散サンプル値に対する到来方向推定結果との差の絶対値が所定値未満か否かを判定する(S15−3)。
【0160】
この所定値は、レーダ装置1の距離分解能ΔR(数式(1)参照)以内に複数のターゲットが存在するか否かを判定するための閾値とされる。
【0161】
ステップS15−3において差の絶対値が所定値未満であると判定されたとする(S15−3、YES)。一致判定部29は、レーダ装置1の距離分解能ΔR以内に複数のターゲットが存在しないと判定する(S15−5)。更に、一致判定部29は、最大の受信電力推定結果と、最大の受信電力推定結果を含む推定結果における到来方向推定結果とを、高分解能到来方向推定結果(図8参照)として出力する。
【0162】
ステップS15−3において差の絶対値が所定値以上であると判定されたとする(S15−3、NO)。一致判定部29は、レーダ装置1の距離分解能ΔR以内に複数のターゲットが存在すると判定する(S15−6)。更に、一致判定部29は、最大の受信電力POWp_peak(q_peak,m)を中心として時間的に前後の各相関広がり範囲(2Ns−1)における各推定結果のうち、到来方向推定結果の一致性が高いものが存在するか否かを判定する(S15−7)。
【0163】
到来方向推定結果の一致性が高いとは、複数のターゲットがいると判定された後において、各ターゲットに対するレーダ装置1における到来方向推定結果の信頼性が高いということを意味する。例えば複数のターゲットとして、ターゲットA及びターゲットBがいるとする。到来方向推定結果の一致性が高いと、ターゲットA及びターゲットBによりそれぞれ反射された反射波の信号の到来における相対遅延は、パルス幅Tp以上となる。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果とが重複しないことになる。
【0164】
反対に、到来方向推定結果の一致性が高くないと、ターゲットA及びターゲットBによりそれぞれ反射された反射波の信号の到来における相対遅延は、パルス幅Tp未満となる。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果とが重複することになる。
【0165】
ステップS15−7において到来方向推定結果の一致性が高いものが存在すると判定されたとする(S15−7、YES)。一致判定部29は、最大の受信電力を中心として時間的に前後の各相関広がり範囲における各推定結果のうち、到来方向推定結果の一致性が高いものを高分解能到来方向推定結果(図8参照)として出力する(S15−8)。
【0166】
ステップS15−7において到来方向推定結果の一致性が高いものが存在しないと判定されたとする(S15−7、NO)。一致判定部29は、最大の受信電力推定結果を中心として、時間的に前後の各相関広がり範囲における各推定結果から、数式(10)を満たす離散時刻のうち最も時間的に離れている離散時刻における到来方向推定結果を出力する(S15−9)。
【0167】
ここで、レーダ装置1の距離分解能以下の範囲に複数のターゲットが存在するので、図12に示す様に、各ターゲットからの各反射波の信号が、1.0パルス幅Tp以下の相対遅延時間以内に到来したとする。
【0168】
例えば、図12(a)に示す様に、各ターゲットからの各反射波の信号の到来における相対遅延が1.0パルス幅Tpであるとする。レーダ装置1は、各反射波の信号が合成されていない離散時刻における相関値を用いた到来方向推定結果(同図の符号C1,C2)を選択する。これにより、レーダ装置1は、レーダ装置1の距離分解能以内に存在する複数のターゲットを分離して検出することができ、ターゲットの到来方向の推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0169】
また、例えば図12(b)及び図12(c)に示す様に、各ターゲットからの各反射波の信号の到来における相対遅延が0.5パルス幅(Tp/2)又は0.3…パルス幅(Tp/3)であるとする。レーダ装置1は、各反射波の信号の合成の影響が小さい離散時刻における相関値を用いた到来方向推定結果(図12(b)の符号C3,C4,図12(c)の符号C5,C6)を選択する。これにより、レーダ装置1は、レーダ装置1の距離分解能以内に存在する複数のターゲットを分離して検出することができ、ターゲットの到来方向の推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0170】
上述した第1の実施形態のレーダ装置1の効果について、図15を参照して説明する。図15は、高分解能処理部26の推定結果を模式的に示した説明図である。同図(a)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅1.5Tpとした説明図である。同図(b)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tpとした説明図である。同図(c)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/2とした説明図である。同図(d)は、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延をパルス幅Tp/3とした説明図である。
【0171】
図14においては、ターゲットAからの反射波の信号の受信信号レベルと、ターゲットBからの反射波の信号の受信信号レベルとが、ほぼ等しいと想定されている。即ち、ターゲットA及びターゲットBは、レーダ装置1の距離分解能程度の範囲に存在することが想定されている。図14の丸印(○)の中心点の座標は到来方向推定結果DOAp(q,m)、丸印の大きさは受信電力推定結果POWp(q,m)の大きさを表している。
【0172】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tpよりも大きい時間である1.5Tpであるとする(図15(a)参照)。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わることがない。即ち、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲における各到来方向推定結果が一致し、レーダ装置1は、各到来方向推定結果をターゲットA,Bの真値として推定することができる。
【0173】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅1.0Tpに等しいとする(図15(b)参照)。ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0174】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0175】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−8の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない離散時刻における到来方向推定結果を、受信電力推定値としては劣っていても選択して出力することができる。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0176】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/2に等しいとする(図15(c)参照)。同様に、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0177】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0178】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−9の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない最も時間的に離散した離散時刻における到来方向推定結果を選択して出力する。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0179】
ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3に等しいとする(図15(d)参照)。同様に、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲とが交わる離散時刻が発生する。この離散時刻においては、ターゲットAに対する到来方向推定結果とターゲットBに対する到来方向推定結果とがベクトル的に合成される。このため、離散時刻における受信電力推定結果が高くなることがあるが、この受信電力推定結果及び到来方向推定結果は誤ったものとなる可能性が高い。
【0180】
従来のレーダ装置では、受信電力推定結果が高い離散時刻における到来方向推定値を選択し、又は、この離散時刻の前後の離散時刻における到来方向推定結果を合成したものを最終的な推定結果としていた。このため、従来のレーダ装置では、レーダ装置の距離分解能以内に複数のターゲットが存在すると、各ターゲットに対する到来方向推定結果に対する推定誤差が大きくなる。
【0181】
本発明に係るレーダ装置1では、高分解能処理部26は、上述したステップS15−9の動作を行う。従って、レーダ装置1は、ターゲットAに対する到来方向推定結果の相関広がり範囲とターゲットBに対する到来方向推定結果の相関広がり範囲が交わっていない最も時間的に離散した離散時刻における到来方向推定結果を選択して出力する。これにより、レーダ装置1によれば、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0182】
更に、第1の実施形態のレーダ装置1では、上述した特許文献1に開示されているフィルタバンクを用いることがないため、レーダ装置1の回路規模の増大を抑制することができる。
【0183】
なお、第1の実施形態においては、相関広がり範囲として(2Ns−1)として説明した。但し、複数の各ターゲットからの反射波の信号のレーダ受信部3における受信タイミング(到来タイミング)がレーダ受信部3のサンプリングレートに一致しないことも考慮して、相関広がり範囲を2Nsとしても良い。
【0184】
〔第1の実施形態の変形例1〕
第1の実施形態の変形例1では、第1の実施形態のレーダ装置1の高分解能処理部26の一致判定部29のステップS15−9の動作を、後述する動作に置き換える。この置き換えられた動作を除く第1の実施形態の変形例1のレーダ装置の他の動作は第1の実施形態のレーダ装置1と同様であるため、以下、置き換える動作の内容のみ説明し、置き換えられた動作を除く他の動作の説明は省略する。
【0185】
第1の実施形態の変形例1のレーダ装置では、一致判定部は、第1の実施形態のレーダ装置1の高分解能処理部26の一致判定部29のステップS15−9に対応して、次の様な動作を行う。
【0186】
具体的には、一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に前側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp1(q1,m)を選択する。更に、一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に後側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp2(q2,m)を選択する。
【0187】
更に、一致判定部は、最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)における到来方向推定結果DOAp_peak(q_peak,m)を用いて、選択された到来方向推定結果DOAp1(q1,m)及びDOAp2(q2,m)を外挿的に補正する。
【0188】
この外挿的な補正は、数式(14)及び数式(15)に示す様に行われる。一致判定部は、補正された到来方向推定結果cDOAp1(q1,m)及びcDOAp2(q2,m)を高分解能到来方向推定結果(図8参照)として出力する。外挿的な補正は、例えば線形補間が用いられている。パラメータαは所定の係数である。
【0189】
【数14】
【0190】
【数15】
【0191】
なお、パラメータαは固定値でも良いが、各離散時刻(p1,q1),(p2,q2),(p_peak,q_peak)における受信電力推定結果POWp1(q1,m),POWp2(q2,m)及びPOWp_peak(q_peak,m)によって重み付けした可変値としても良い。また、数式(14)及び数式(15)において、ΔT[(p1,q1)−(p_peak,q_peak)]は、離散時刻(p1,q1)と離散時刻(p_peak,q_peak)の時間差を表す。
【0192】
図16は、第1の実施形態の変形例1のレーダ装置の高分解能処理部の推定結果を模式的に示した説明図である。図16において、上述した外挿的な補正によって演算された到来方向推定結果cDOAp1(q1,m)及びcDOAp2(q2,m)は、黒丸印(●)により表されている。但し、パラメータα=1とする。
【0193】
以上により、第1の実施形態の変形例1のレーダ装置は、上述した外挿的な補正によって、第1の実施形態のレーダ装置1に比べて、各ターゲットの方向推定精度をより向上することができる。特に、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3に等しいと顕著である。
【0194】
また、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延が、パルス幅Tp/2又はTp/3に等しいのであれば、上述した図13のステップS15−9と外挿的な補正との動作とを併用しても良い。
【0195】
具体的には、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/3程度であるとする。一致判定部は、最大の受信電力推定結果を中心として、数式(13)を満たす離散時刻のうち時間的に前側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp1(q1,m)を選択する。更に、一致判定部は、最大の受信電力推定結果を中心として、数式(10)を満たす離散時刻のうち時間的に後側の相関広がり範囲からもっとも離れた離散時刻における到来方向推定結果DOAp2(q2,m)を選択する。
【0196】
更に、一致判定部は、最大の受信電力推定結果を得るときの離散時刻(p_peak,q_peak)における到来方向推定結果DOAp_peak(q_peak,m)を用いて、選択された到来方向推定結果DOAp1(q1,m)及びDOAp2(q2,m)を外挿的に補正する。
【0197】
一方、ターゲットAからの反射波の信号とターゲットBからの反射波の信号との到来における相対遅延がパルス幅Tp/2程度であるとする。一致判定部は、最大の受信電力推定結果を中心として、時間的に前後の各相関広がり範囲における各推定結果から、数式(10)を満たす離散時刻のうち最も離散している離散時刻における到来方向推定結果を出力する。
【0198】
これにより、第1の実施形態の変形例1のレーダ装置よりも、更に各ターゲットの方向推定精度をより向上することができる。また、分離された各々のターゲットの到来時間から距離測定が可能となり、距離推定精度が向上する。
【0199】
〔第1の実施形態の変形例2〕
第1の実施形態の変形例2では、第1の実施形態のレーダ装置1のレーダ受信部3におけるNs倍のオーバーサンプルの代わりに、レーダ送信部2における送信符号の出力タイミングを所定のサンプリングレートを用いて送信周期Tr毎に周期的にシフトする。
【0200】
図17は、第1の実施形態の変形例2のレーダ装置1xの内部構成を詳細に示すブロック図である。図18は、第1の実施形態の変形例2のレーダ装置1xの動作に関するタイミングチャートである。
【0201】
レーダ装置1xと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。以下、レーダ装置1xの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0202】
図17において、レーダ装置1xは、送信タイミング制御部33、送信アンテナAN1と接続されるレーダ送信部2x、及び、各受信アンテナAN2a〜AN2dと接続される各アンテナ系統処理部11ax〜11dx(不図示、以下同様)を有するレーダ受信部3を備える。なお、レーダ送信部2x及びレーダ受信部3xは、共に基準信号発振器Loに接続され、基準信号発振器Loから信号が供給され、レーダ送信部2x及びレーダ受信部3xの処理の同期が揃うようになっている。
【0203】
(レーダ送信部)
次に、レーダ送信部2xの各部の構成について説明する。
【0204】
レーダ送信部2xは、図17に示す様に、送信信号生成部4x及び送信RF部5を備える。送信信号生成部4xは、符号生成部6、変調部7、LPF8、遅延器31及び送信タイミング切換部32を備える。
【0205】
次に、レーダ送信部2xの各部の動作について説明する。
【0206】
送信信号生成部4xは、基準信号発振器Loにより生成されたリファレンス信号に基づいて、リファレンス信号を所定倍に逓倍した信号を生成する。送信信号生成部4xの各部は、生成された信号に基づいて動作する。
【0207】
変調部7により生成されたベースバンドの送信信号r(k,M)は、LPF8を介して、遅延器31及び送信タイミング切換部32に出力される。
【0208】
遅延器31は、LPF8を介して出力された送信信号r(k,M)に対して、所定の遅延時間ΔDの遅延を与え、遅延時間ΔDを与えられた送信信号r(k,M)を送信タイミング切換部32に出力する。この所定の遅延時間ΔDに関しては、数式(16)が成立する。
【0209】
【数16】
【0210】
送信タイミング切換部32は、LPF8を介して出力された送信信号r(k,M)及び遅延器31により出力された送信信号r(k、M)を入力する。送信タイミング切換部32は、送信タイミング制御部33により出力された送信タイミング制御信号に応じて、LPF8を介して出力された送信信号r(k,M)又は遅延器31により出力された送信信号r(k,M)の出力を切り換える。送信タイミング切換部32は、切り換えによって選択された送信信号r(k,M)を送信RF部5に出力する。
【0211】
送信タイミング制御部33は、基準信号発振器Loにより生成されたリファレンス信号を所定倍に逓倍した信号に基づいて動作する。送信タイミング制御部33は、信号に基づいて、送信周期Tr毎若しくは送信周期Trの整数倍毎に、送信タイミング切換部32の出力を切り換える旨の送信タイミング制御信号を、送信タイミング切換部32及び相関値演算入力切換部34aに出力する。なお、この送信タイミング制御信号には、相関値演算入力切換部34aの出力を切り換える旨の信号が含まれる。
【0212】
(レーダ受信部)
次に、レーダ受信部3xの各部の構成について説明する。レーダ受信部3xには、第1の実施形態のレーダ装置1と同様に、複数の例えば4つのアレーアンテナが構成されている。更に、第1の実施形態のレーダ装置1と同様に、アレーアンテナを構成する各受信アンテナはアンテナ系統処理部毎に設けられている。
【0213】
レーダ受信部3xは、図17に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11ax〜11dx、第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26を備える。以下の説明においては、4つのアンテナ系統処理部11ax〜11dxの各部の構成及び動作は同様であるため、アンテナ系統処理部11axを例示して説明する。
【0214】
アンテナ系統処理部11axは、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13axを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13axは、A/D変換部17a,18a、相関値演算入力切換部34a、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。レーダ受信部3xは、各送信周期Trを信号処理部13ax〜13dx(不図示、以下同様)における信号処理区間として周期的に演算する。
【0215】
次に、レーダ受信部3xの各部の動作について説明する。
【0216】
A/D変換部17aにより変換されたデジタルデータの同相信号成分、及びA/D変換部18aにより変換されたデジタルデータの直交信号成分は、相関値演算入力切換部34aに出力される。
【0217】
相関値演算入力切換部34aは、A/D変換部17a及びA/D変換部18によりそれぞれ出力されたデジタルデータの同相信号成分及び直交信号成分を入力する。相関値演算入力切換部34aは、A/D変換部17a,18aのサンプリングレートNsに応じて、入力された同相信号成分及び直交信号成分からなる複素数x(k,M)の出力を、送信タイミング制御部33により出力された送信タイミング制御信号に応じて、離散時刻毎に順次切り換える。相関値演算入力切換部34aは、切り換えによって選択された複素数x(k,M)を、第1相関値演算部20a又は第2相関値演算部21aに出力する。
【0218】
図18には、送信タイミング制御信号、高周波送信信号、遅延時間τ1の受信信号、A/D変換部17a,18aのサンプルタイミング、及び相関値演算入力切換部34aの出力先がそれぞれ示されている。
【0219】
図18に示す様に、送信タイミング制御信号が遅延器31からの出力を選択しないと(遅延器出力OFF)、送信周期Trの開始タイミングに同期して、符号送信区間Twにわたって高周波送信信号が送信される。一方、送信タイミング制御信号が遅延器31からの出力を選択すると(遅延器出力ON)、送信周期Trの開始タイミングから上述した遅延時間ΔDだけ遅延して、符号送信区間Twにわたって高周波送信信号が送信される。
【0220】
従って、遅延器出力OFFでは、レーダ装置1xは、送信周期Trの開始タイミングから遅延時間τ1のタイミングにおいて、高周波送信信号の受信を開始する。一方、遅延器出力ONでは、レーダ装置1xは、送信周期Trの開始タイミングから遅延時間(τ1+ΔD)のタイミングにおいて、高周波送信信号の受信を開始する。
【0221】
これに対し、送信周期Trに同期して整数倍のサンプリングが行われるため、遅延器出力OFFと遅延器出力ONとでは、A/D変換器17a,18bのサンプルタイミングは、遅延時間ΔD(数式(13)参照)だけずれる。遅延時間ΔDをパルス幅Tpより小さい値に設定することで、第1の実施形態のサンプリングレートNsを用いた離散サンプル値を等価的に得ることができる。
【0222】
相関値演算入力切換部34aは、遅延器出力OFFの離散サンプル値x(k,M)を、第1相関値演算部20aへ出力し、遅延器出力ONの離散サンプル値x(k,M)を、第Ns(=2)番目の相関演算部(第2相関値演算部21a)へ出力する。以降の動作は、第1の実施形態と同様である。
【0223】
以上により、第1の実施形態の変形例2のレーダ装置1xは、レーダ受信部3xのA/D変換部17a,18aのサンプルタイミングよりも細かい単位を用いて、ターゲットからの反射波を受信することができる。これにより、レーダ装置1xによれば、ターゲットからの反射波の受信時におけるサンプリングレート(オーバーサンプル数)を等価的に高めることができる。
【0224】
これにより、レーダ装置1xでは、第1の実施形態のレーダ装置1のレーダ受信部3において得られたA/D変換のサンプリングレートと同様なサンプリングレートを、より低速なA/D変換部を用いることでも達成することができる。
【0225】
一般的にA/D変換部は、より低速なサンプリングレートを有すれば、量子化ビット数を高めることが、より容易となる。このため、レーダ受信部3xにおける受信ダイナミックレンジを高めることができ、車両/歩行者を含めたターゲットの検出精度を高めることができる。更に、低速なサンプリングレートを有するA/D変換部を用いることで、レーダ装置1xにおける消費電力を低減することができる。
【0226】
〔第1の実施形態の変形例3〕
第1の実施形態の変形例3では、第1の実施形態のレーダ装置1のレーダ受信部3のS/P変換部19aの代わりに、低速なサンプリングレートを有するA/D変換部を更に2つ用いる。
【0227】
図19は、第1の実施形態の変形例3のレーダ装置1yのレーダ受信部3yにおける第1アンテナ系統処理部11ayの内部構成を詳細に示すブロック図である。図20は、第1の実施形態の変形例3のレーダ装置1yのレーダ受信部3yにおける第1アンテナ系統処理部11ayにおける各A/D変換部の動作に関するタイミングチャートである。
【0228】
レーダ装置1yと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。レーダ装置1yのレーダ送信部の構成は、図4に示された第1の実施形態のレーダ装置1のレーダ送信部2と同様であり、図19にはレーダ装置1yのレーダ送信部の構成は省略している。
【0229】
以下、レーダ装置1yの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0230】
レーダ装置1yのレーダ受信部3yと第1の実施形態のレーダ装置1のレーダ受信部3とにおいて、第1アンテナ系統処理部11ayが第1アンテナ系統処理部11aと異なる。その他の第1到来時間方向推定部24、第2到来時間方向推定部25及び高分解能処理部26の構成及び動作は同様であるため、構成及び動作の説明は省略する。
【0231】
(アンテナ系統処理部)
次に、アンテナ系統処理部11ayの各部の構成について説明する。なお、レーダ装置1yのレーダ受信部3yには、第1の実施形態のレーダ装置1と同様に、複数の例えば4つのアレーアンテナが構成されている。更に、第1の実施形態のレーダ装置1と同様に、アレーアンテナを構成する各受信アンテナはアンテナ系統処理部毎に設けられている。
【0232】
アンテナ系統処理部11ayは、図19に示す様に、受信アンテナAN2aが接続された受信RF部12a、及び信号処理部13ayを備える。受信RF部12aは、増幅器14a、周波数変換部15a及び直交検波部16aを備える。信号処理部13ayは、遅延器35a、4つのA/D変換部17a1,17a2,18a1,18a2、第1相関値演算部20a、第2相関値演算部21a、第1加算処理部22a及び第2加算処理部23aを備える。アンテナ系統処理部11ayは、各送信周期Trを信号処理部13ay〜13dy(不図示、以下同様)における信号処理区間として周期的に演算する。
【0233】
次に、アンテナ系統処理部11ayの各部の動作について説明する。
【0234】
遅延器35aは、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して、所定の遅延時間ΔTDの遅延を与え、遅延時間ΔTDを与えられた信号をA/D変換部18a1,18a2にそれぞれ入力する。この所定の遅延時間ΔTDに関しては、数式(17)が成立する。
【0235】
【数17】
【0236】
A/D変換部17a1は、直交検波部16aにより出力された同相信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に同期したタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。A/D変換部17a1は、アナログデータの同相信号をデジタルデータに変換する。A/D変換部17a1は、変換されたデジタルデータの同相信号成分を、第1相関値演算部20aに出力する。
【0237】
A/D変換部17a2は、直交検波部16aにより出力された直交信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に同期したタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部17a2は、アナログデータの直交信号をデジタルデータに変換する。A/D変換部17a2は、変換されたデジタルデータの直交信号成分を、第1相関値演算部20aに出力する。
【0238】
A/D変換部18a1は、直交検波部16aにより出力された同相信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して遅延器35aから出力されたタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部18a1は、アナログデータの同相信号をデジタルデータに変換する。A/D変換部18a1は、変換されたデジタルデータの同相信号成分を、第2相関値演算部21aに出力する。
【0239】
A/D変換部18a2は、直交検波部16aにより出力された直交信号に対し、基準信号発振器Loにより出力されたリファレンス信号を所定倍に逓倍した信号に対して遅延器35aから出力されたタイミングにおいて、2Tp/Nsのサンプリングレートを用いてサンプリングする。これにより、A/D変換部18a2は、アナログデータの直交信号をデジタルデータに変換する。A/D変換部18a2は、変換されたデジタルデータの直交信号成分を、第2相関値演算部21aに出力する。
【0240】
A/D変換部17a1,17a2とA/D変換部18a1,18a2とのサンプルタイミングは、図20に示す様に、数式(17)によって示された遅延時間ΔTDの相対遅延がある。更に、A/D変換部17a1,17a2とA/D変換部18a1,18a2は、それぞれサンプリングレート2Tp/Nsを用いてサンプリングし、サンプリングされた離散サンプル値を第1相関値演算部20a及び第2相関値演算部21aに出力する。
【0241】
従って、上述した遅延器35a、A/D変換部17a1,17a2,18a1,18a2により、第1の実施形態におけるサンプリングレートTp/NsのA/D変換部17a,18a及びS/P変換部19aと同様な動作をすることが可能である。
【0242】
また、第1の実施形態の変形例3のレーダ装置1yでは、第1の実施形態のレーダ装置1に比べてA/D変換部は複数必要となる。しかし、レーダ装置1yでは、各A/D変換部のサンプリングレートをより低速にすることができる。
【0243】
これにより、レーダ装置1yによれば、各A/D変換部におけるA/D変換時の量子化精度を高める、即ち、量子化ビット数を多くすることが容易となり、レーダ装置1yにおける受信ダイナミックレンジを高めることができる。
【0244】
なお、図19に示されたアンテナ系統処理部11ayでは、A/D変換部17a1,17a2,18a1,18a2が設けられたが、更に多くのA/D変換部を設けても良く、同様な効果を得ることができる。このため、レーダ受信部3yにおける受信ダイナミックレンジを高めることができ、車両/歩行者を含めたターゲットの検出精度を高めることができる。更に、低速なサンプリングレートを有するA/D変換部を用いることで、レーダ装置1yにおける消費電力を低減することができる。
【0245】
〔第1の実施形態の変形例4〕
第1の実施形態の変形例4では、第1の実施形態のレーダ装置1のレーダ受信部3に到来時間方向選択部36を更に設ける。この到来時間方向選択部36を設けることで、第1到来時間方向選択部24z、第2到来時間方向選択部25z及び高分解能処理部26の処理量及び処理時間を低減することができる。
【0246】
図21は、第1の実施形態の変形例4のレーダ装置1zのレーダ受信部3zの内部構成を詳細に示すブロック図である。レーダ装置1zと第1の実施形態のレーダ装置1との各部の構成及び動作が同一のものには、同一の符号が付されている。レーダ装置1zのレーダ送信部の構成は、図4に示された第1の実施形態のレーダ装置1のレーダ送信部2と同様であり、図21にはレーダ装置1zのレーダ送信部の構成は省略している。
【0247】
以下、レーダ装置1zの構成及び動作の説明において、同一の構成及び動作の内容に関しては省略し、レーダ装置1の構成及び動作と異なる内容に関して説明する。なお、以下の説明において、サンプリングレートNsは、Ns=2であるとするが、Ns=2に限定されない。
【0248】
レーダ装置1zのレーダ受信部3zでは、第1の実施形態のレーダ装置1のレーダ受信部3と比べて、到来時間方向選択部36が更に設けられ、第1到来時間方向推定部24z及び第2到来時間方向選択部25zがそれぞれ第1到来時間方向推定部24及び第2到来時間方向推定部25とが動作において異なる。その他の各アンテナ系統処理部11a〜11dに関しては、第1の実施形態のレーダ装置1のレーダ受信部3の各アンテナ系統処理部11a〜11dと同様のため、内容の説明は省略する。
【0249】
(レーダ受信部)
次に、レーダ受信部3zの各部の構成について説明する。レーダ受信部3zには、複数の例えば4つのアレーアンテナが構成されている。
【0250】
レーダ受信部3zは、図21に示す様に、アレーアンテナを構成する受信アンテナの本数に対応して設けられた4つのアンテナ系統処理部11a〜11d、第1到来時間方向推定部24z、第2到来時間方向推定部25z、到来時間方向選択部36、及び高分解能処理部26を備える。以下の説明において、必要に応じて、4つのアンテナ系統処理部11a〜11dのうち、アンテナ系統処理部11aを例示して説明する。
【0251】
レーダ装置1zのレーダ受信部3zにおいて、第1加算処理部22aにより出力された平均第1相関値aveAC1(q,M)は、第1到来時間方向推定部24z及び到来時間方向選択部36に出力される。なお、第2加算処理部23aにより出力された平均第2相関値aveAC2(q,M)は、第2到来時間方向推定部25zに出力される。
【0252】
なお、図21に示す様に、他のアンテナ系統処理部11b〜11dの各第1加算処理部により出力された平均第1相関値は、それぞれ第1到来時間方向推定部24z及び到来時間方向選択部36に出力される。なお、他のアンテナ系統処理部の各第2加算処理部により出力された平均第2相関値は、それぞれ第2到来時間方向推定部25zに出力される。
【0253】
到来時間方向選択部36は、各アンテナ系統処理部11a〜11dの各第1加算処理部により出力された各平均第1相関値に基づいて、ターゲットからの反射波の信号が所定の受信信号レベルより高い離散時刻を選択する。到来時間方向選択部36は、選択された離散時刻、及び離散時刻の時間的に前後の離散時刻を含む選択離散時刻情報を、第1到来時間方向推定部24z及び第2到来時間方向推定部25zにそれぞれ出力する。
【0254】
以下、到来時間方向選択部36の動作について詳細に説明する。
【0255】
到来時間方向選択部36は、各アンテナ系統処理部11a〜11dの各第1加算処理部により出力された各平均第1相関値を入力する。到来時間方向選択部36は、入力された各平均第1相関値に基づいて、各離散時刻(z,q)におけるアレーアンテナの平均受信電力を、数式(18)に従って演算する。パラメータqは、q=1〜(Nr+Nu)/Noである。
【0256】
【数18】
【0257】
到来時間方向選択部36は、数式(18)に従って演算された平均受信電力が所定の受信電力Lpよりも大きい離散時刻(z,qs)を選択する。パラメータqsは、qs=1〜(Nr+Nu)/Noのうち、数式(19)を満たす離散時刻である。
【0258】
【数19】
【0259】
到来時間方向選択部36は、選択された離散時刻(z,qs)と、離散時刻(z,qs)と時間的に前後する離散時刻(z,qs−1)及び(z,qs+1)を含む離散時刻の情報を選択離散時刻情報として、第1到来時間方向推定部24z及び第2到来時間方向推定部25zに出力する。以下では、上記の離散時刻の情報を(q,m)として記載する。(q,m)には、数式(19)を満たすことを条件に選択された離散時刻(z,qs)と、離散時刻(z,qs)と時間的に前後する離散時刻(z,qs−1)及び(z,qs+1)を含む。
【0260】
第1到来時間方向推定部24zは、各アンテナ系統処理部の第1加算処理部により出力された平均第1相関値のうち、到来時間方向選択部36により出力された選択離散時刻情報に含まれる離散時刻(q,m)における平均第1相関値を抽出する。第1到来時間方向推定部24zは、抽出された平均第1相関値に基づいて、ターゲットからの反射波の受信電力を推定し、それに基づき到来時間を測定する。さらに選択された離散時刻毎に、レーダ装置1zからターゲットまでの到来方向を推定演算する。
【0261】
この推定演算の結果(推定結果)には、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第1到来時間方向推定部24zは、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。ここでは、p=1である。
【0262】
同様に、第2到来時間方向推定部25zは、各アンテナ系統処理部の第2加算処理部により出力された平均第2相関値のうち、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における平均第2相関値を抽出する。第2到来時間方向推定部25zは、抽出された平均第2相関値に基づいて、ターゲットからの反射波の受信電力を推定し、それに基づき到来時間を測定する。さらに選択された離散時刻毎に、レーダ装置1zからターゲットまでの到来方向を推定演算する。
【0263】
この推定演算の結果(推定結果)には、到来時間方向選択部36により出力された選択離散時刻情報に含まれる各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と、受信電力推定結果POWp(q,m)とが含まれる。第2到来時間方向推定部25zは、推定結果[POWp(q,m),DOAp(q,m)]を高分解能処理部26に出力する。ここでは、p=2である。
【0264】
高分解能処理部26は、第1到来時間方向推定部24z及び第2到来時間方向推定部25zにより出力された選択離散時刻情報の各離散時刻(q,m)における最大受信電力方向の到来方向推定結果DOAp(q,m)と受信電力推定結果POWp(q,m)である各推定結果[POWp(q,m),DOAp(q,m)]を入力する。ここでは、p=1,2である。以下の高分解能処理部26の動作の説明は、上述した第1の実施形態のレーダ装置1の高分解能処理部26と同様であるため省略する。
【0265】
以上により、各到来時間方向推定部は、全ての離散時刻q=1〜(Nr+Nu)/Noから数式(19)を満たす平均受信電力を基に選択された一部の離散時刻についてのみターゲットを到来方向推定する。これにより、レーダ装置1zによれば、ターゲット検出率の劣化を防ぎつつ、推定処理量及び推定処理時間を低減することができる。
【0266】
以上、図面を参照しながら各種の実施形態について説明したが、本発明のレーダ装置はかかる例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0267】
なお、第1の実施形態の変形例4において、到来時間方向選択部36は、上述した数式(16)を満たす離散時刻(z,q)を選択する代わりに、次の様な処理を行っても良い。具体的には、到来時間方向選択部36は、数式(18)に従って演算された平均受信電力ave_P(q,m)から、最も大きい平均受信電力から順にN_Lp個の各平均受信電力を得るときの各離散時刻を選択する。この選択された各離散時刻を(z、qs’))として表す。パラメータqs’は、離散時刻q=1〜(Nr+Nu)/Noを平均受信電力ave_P(q,m)の大きい順に並べ替えたうちの、上位N_Lp個の離散時刻である。
【0268】
これにより、各到来時間方向推定部の到来方向推定処理における離散時刻の上限が固定化されることになるため、レーダ装置1zにおいて最大限必要となる推定処理量及び推定処理時間を抑えることができる。
【0269】
なお、ターゲットまでの距離RTは、その到来時間推定結果TOAを基に、RT=C×TOA/2として変換することが可能であるため、本実施例における到来時間推定を到来距離推定と置き換えても良い。ここで、パラメータCは光の速度を示す。
【産業上の利用可能性】
【0270】
本発明は、距離分解能以内に複数のターゲットが存在すると、各ターゲットからの各反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上するレーダ装置として有用である。
【符号の説明】
【0271】
1、1x、1y、1z レーダ装置
2、2x レーダ送信部
3、3x、3z レーダ受信部
4、4r、4x 送信信号生成部
5 送信RF部
6 符号生成部
7、7r 変調部
8、8r LPF
9、15a 周波数変換部
10、14a 増幅器
11a、11b、11c、11d、11ax、11ay、11bx、11cx、11dx アンテナ系統処理部
12a 受信RF部
13a、13ax、13ay 信号処理部
16a 直交検波部
17a、17a1、17a2、18a、18a1、18a2 A/D変換部
19a S/P変換部
20a 第1相関値演算部
21a 第2相関値演算部
22a 第1加算処理部
23a 第2加算処理部
24、24z 第1到来時間方向推定部
25、25z 第2到来時間方向推定部
26 高分解能処理部
27 受信信号レベル判定部
28 一致判定範囲抽出部
29 一致判定部
31、35a 遅延器
32 送信タイミング切換部
33 送信タイミング制御部
34a 相関値演算入力切換部
36 到来時間方向選択部
AN1 送信アンテナ
AN2a 受信アンテナ
CM 送信符号記憶部
CT3 送信符号制御部
Lo 基準信号発振器
Tp パルス幅
Tr 送信周期
Tw 送信区間
τ1、τ2 遅延時間
【特許請求の範囲】
【請求項1】
パルス圧縮符号を高周波送信信号に変換し、前記高周波送信信号を送信アンテナから送信するレーダ送信部と、
ターゲットにより反射された前記高周波送信信号である反射波の信号を用いてターゲットまでの到来時間及び到来方向を、前記パルス圧縮符号におけるパルス送信レートに対しN(整数)倍のサンプリングレートを用いて、推定するレーダ受信部と、を含み、
前記レーダ受信部は、
受信信号と前記パルス圧縮符号との相関値を出力する複数のアンテナ系統処理部と、
前記複数のアンテナ系統処理部の各出力を基に、個別に前記ターゲットの到来時間及び到来方向を推定するN個の到来時間方向推定部と、
前記N個の到来時間方向推定部での各推定結果に基づいて、前記高周波送信信号の距離分解能以内に存在する複数の前記ターゲットを、各ターゲットを分離して検出する高分解能処理部と、を含み、
前記複数のアンテナ系統処理部は、それぞれ、
前記反射波の信号を受信する受信アンテナと、
前記受信された信号をベースバンドの受信信号に変換する受信RF部と、
前記変換された受信信号を、前記N(整数)倍のサンプリングレートを用いてデジタルデータに変換するA/D変換部と、
1/Nサンプルタイミング毎に前記変換された受信信号のデジタルデータと、前記パルス圧縮符号と、の相関値を演算するN個の相関値演算部と、を有する
レーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
各前記推定結果には、各前記サンプルタイミングの受信電力推定結果が含まれ、
前記高分解能処理部は、
前記受信電力推定結果が所定の受信信号レベル以上であるか否かを判定する受信信号レベル判定部を有するレーダ装置。
【請求項3】
請求項2に記載のレーダ装置であって、
前記高分解能処理部は、
前記受信電力推定結果が前記所定の受信信号レベル以上となるサンプルタイミングの前後の所定の時間範囲における各推定結果を抽出する一致判定範囲抽出部を、更に有するレーダ装置。
【請求項4】
請求項3に記載のレーダ装置であって、
前記一致判定範囲抽出部は、更に、
各々の前記所定の時間範囲における各推定結果の個数を単位として、前記サンプリングレートに応じて時間的にシフトした後の個数の各推定結果を抽出するレーダ装置。
【請求項5】
請求項3又は4に記載のレーダ装置であって、
前記一致判定範囲抽出部は、更に、
前記抽出された個数の各推定結果を、所定数のブロックに分割するレーダ装置。
【請求項6】
請求項5に記載のレーダ装置であって、
前記高分解能処理部は、
前記抽出された各々の所定の時間範囲における各推定結果から、最大の受信電力推定結果を含む推定結果を選択する一致判定部を、更に有するレーダ装置。
【請求項7】
請求項6に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果を得るときのサンプルタイミングが、前記分割されたブロックのうち中心のブロックの各推定結果におけるサンプルタイミングであるか否かを判定するレーダ装置。
【請求項8】
請求項7に記載のレーダ装置であって、
各々の前記推定結果には、各々の前記サンプルタイミングにおける到来方向推定結果が更に含まれ、
前記一致判定部は、更に、
前記選択された推定結果を得るときのサンプリングタイミングが、前記中心のブロックの各推定結果におけるサンプリングタイミングであるとの判定によって、前記選択された推定結果の到来方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の到来方向推定結果との差が所定値未満であるか否かを判定するレーダ装置。
【請求項9】
請求項8に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果の方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の方向推定結果との差が所定値未満であるとの判定によって、前記高周波送信信号の距離分解能以内にターゲットが複数存在しないと判定するレーダ装置。
【請求項10】
請求項8又は9に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果の方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の方向推定結果との差が所定値以上であるとの判定によって、前記高周波送信信号の距離分解能以内にターゲットが複数存在すると判定するレーダ装置。
【請求項11】
請求項10に記載のレーダ装置であって、
前記一致判定部は、更に、
最大の受信電力推定結果を中心に、前記前後の所定の時間範囲における各推定結果から、到来方向推定結果の一致性が高い到来方向推定結果が存在するか否かを判定するレーダ装置。
【請求項12】
請求項11に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在するとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記到来方向推定結果の一致性が高い到来方向推定結果を出力するレーダ装置。
【請求項13】
請求項11又は12に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在しないとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記所定の受信信号レベル以上の受信電力推定結果を有する各推定結果のサンプルタイミングのうち前後の所定の時間範囲において最も時間的に離散しているサンプルタイミングにおける各到来方向推定結果を出力するレーダ装置。
【請求項14】
請求項11又は12に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在しないとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記所定の受信信号レベル以上の受信電力推定結果を有する各推定結果のサンプルタイミングのうち前後の所定の時間範囲において最も時間的に離散しているサンプルタイミングにおける各到来方向推定結果を外挿的に補正するレーダ装置。
【請求項15】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記アンテナ系統処理部は、
前記サンプリングレートに応じて、前記変換された受信信号のデジタルデータの前記N個の相関値演算部への出力を順次切り換えるS/P変換部と、を更に有するレーダ装置。
【請求項16】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記レーダ送信部は、
前記所定の符号長の送信符号の出力を所定時間の遅延を与える第1遅延部と、
前記送信符号又は前記所定時間の遅延が与えられた送信符号の出力を切り換える送信タイミング切換部と、を更に有し、
前記アンテナ系統処理部は、
前記変換された受信信号のデジタルデータの前記N個の相関値演算部への出力を切り換える相関値演算入力切換部と、を更に有し、
前記レーダ装置は、
前記高周波送信信号の送信周期毎に、前記送信タイミング切換部の出力及び前記相関値演算入力切換部の出力を切り換える制御信号を出力する送信タイミング制御部と、を備えるレーダ装置。
【請求項17】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記アンテナ系統処理部は、
前記受信RF部により変換された受信信号を、所定時間の遅延を与える第2遅延部と、
前記所定時間の遅延が与えられた受信信号を、前記所定倍のサンプリングレートを用いてデジタルデータに変換する第2A/D変換部と、を有するレーダ装置。
【請求項18】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記N個の相関演算部の出力に応じて、前記ターゲットに反射された反射波のレベルが所定の受信信号レベル以上となるサンプルタイミングを選択する到来時間方向選択部と、を更に備えるレーダ装置。
【請求項1】
パルス圧縮符号を高周波送信信号に変換し、前記高周波送信信号を送信アンテナから送信するレーダ送信部と、
ターゲットにより反射された前記高周波送信信号である反射波の信号を用いてターゲットまでの到来時間及び到来方向を、前記パルス圧縮符号におけるパルス送信レートに対しN(整数)倍のサンプリングレートを用いて、推定するレーダ受信部と、を含み、
前記レーダ受信部は、
受信信号と前記パルス圧縮符号との相関値を出力する複数のアンテナ系統処理部と、
前記複数のアンテナ系統処理部の各出力を基に、個別に前記ターゲットの到来時間及び到来方向を推定するN個の到来時間方向推定部と、
前記N個の到来時間方向推定部での各推定結果に基づいて、前記高周波送信信号の距離分解能以内に存在する複数の前記ターゲットを、各ターゲットを分離して検出する高分解能処理部と、を含み、
前記複数のアンテナ系統処理部は、それぞれ、
前記反射波の信号を受信する受信アンテナと、
前記受信された信号をベースバンドの受信信号に変換する受信RF部と、
前記変換された受信信号を、前記N(整数)倍のサンプリングレートを用いてデジタルデータに変換するA/D変換部と、
1/Nサンプルタイミング毎に前記変換された受信信号のデジタルデータと、前記パルス圧縮符号と、の相関値を演算するN個の相関値演算部と、を有する
レーダ装置。
【請求項2】
請求項1に記載のレーダ装置であって、
各前記推定結果には、各前記サンプルタイミングの受信電力推定結果が含まれ、
前記高分解能処理部は、
前記受信電力推定結果が所定の受信信号レベル以上であるか否かを判定する受信信号レベル判定部を有するレーダ装置。
【請求項3】
請求項2に記載のレーダ装置であって、
前記高分解能処理部は、
前記受信電力推定結果が前記所定の受信信号レベル以上となるサンプルタイミングの前後の所定の時間範囲における各推定結果を抽出する一致判定範囲抽出部を、更に有するレーダ装置。
【請求項4】
請求項3に記載のレーダ装置であって、
前記一致判定範囲抽出部は、更に、
各々の前記所定の時間範囲における各推定結果の個数を単位として、前記サンプリングレートに応じて時間的にシフトした後の個数の各推定結果を抽出するレーダ装置。
【請求項5】
請求項3又は4に記載のレーダ装置であって、
前記一致判定範囲抽出部は、更に、
前記抽出された個数の各推定結果を、所定数のブロックに分割するレーダ装置。
【請求項6】
請求項5に記載のレーダ装置であって、
前記高分解能処理部は、
前記抽出された各々の所定の時間範囲における各推定結果から、最大の受信電力推定結果を含む推定結果を選択する一致判定部を、更に有するレーダ装置。
【請求項7】
請求項6に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果を得るときのサンプルタイミングが、前記分割されたブロックのうち中心のブロックの各推定結果におけるサンプルタイミングであるか否かを判定するレーダ装置。
【請求項8】
請求項7に記載のレーダ装置であって、
各々の前記推定結果には、各々の前記サンプルタイミングにおける到来方向推定結果が更に含まれ、
前記一致判定部は、更に、
前記選択された推定結果を得るときのサンプリングタイミングが、前記中心のブロックの各推定結果におけるサンプリングタイミングであるとの判定によって、前記選択された推定結果の到来方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の到来方向推定結果との差が所定値未満であるか否かを判定するレーダ装置。
【請求項9】
請求項8に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果の方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の方向推定結果との差が所定値未満であるとの判定によって、前記高周波送信信号の距離分解能以内にターゲットが複数存在しないと判定するレーダ装置。
【請求項10】
請求項8又は9に記載のレーダ装置であって、
前記一致判定部は、更に、
前記選択された推定結果の方向推定結果と、時間的に連続する前後のサンプルタイミングにおける各推定結果の方向推定結果との差が所定値以上であるとの判定によって、前記高周波送信信号の距離分解能以内にターゲットが複数存在すると判定するレーダ装置。
【請求項11】
請求項10に記載のレーダ装置であって、
前記一致判定部は、更に、
最大の受信電力推定結果を中心に、前記前後の所定の時間範囲における各推定結果から、到来方向推定結果の一致性が高い到来方向推定結果が存在するか否かを判定するレーダ装置。
【請求項12】
請求項11に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在するとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記到来方向推定結果の一致性が高い到来方向推定結果を出力するレーダ装置。
【請求項13】
請求項11又は12に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在しないとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記所定の受信信号レベル以上の受信電力推定結果を有する各推定結果のサンプルタイミングのうち前後の所定の時間範囲において最も時間的に離散しているサンプルタイミングにおける各到来方向推定結果を出力するレーダ装置。
【請求項14】
請求項11又は12に記載のレーダ装置であって、
前記一致判定部は、更に、
前記到来方向推定結果の一致性が高い到来方向推定結果が存在しないとの判定によって、前記前後の所定の時間範囲における各推定結果から、前記所定の受信信号レベル以上の受信電力推定結果を有する各推定結果のサンプルタイミングのうち前後の所定の時間範囲において最も時間的に離散しているサンプルタイミングにおける各到来方向推定結果を外挿的に補正するレーダ装置。
【請求項15】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記アンテナ系統処理部は、
前記サンプリングレートに応じて、前記変換された受信信号のデジタルデータの前記N個の相関値演算部への出力を順次切り換えるS/P変換部と、を更に有するレーダ装置。
【請求項16】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記レーダ送信部は、
前記所定の符号長の送信符号の出力を所定時間の遅延を与える第1遅延部と、
前記送信符号又は前記所定時間の遅延が与えられた送信符号の出力を切り換える送信タイミング切換部と、を更に有し、
前記アンテナ系統処理部は、
前記変換された受信信号のデジタルデータの前記N個の相関値演算部への出力を切り換える相関値演算入力切換部と、を更に有し、
前記レーダ装置は、
前記高周波送信信号の送信周期毎に、前記送信タイミング切換部の出力及び前記相関値演算入力切換部の出力を切り換える制御信号を出力する送信タイミング制御部と、を備えるレーダ装置。
【請求項17】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記アンテナ系統処理部は、
前記受信RF部により変換された受信信号を、所定時間の遅延を与える第2遅延部と、
前記所定時間の遅延が与えられた受信信号を、前記所定倍のサンプリングレートを用いてデジタルデータに変換する第2A/D変換部と、を有するレーダ装置。
【請求項18】
請求項1〜14のうちいずれか一項に記載のレーダ装置であって、
前記N個の相関演算部の出力に応じて、前記ターゲットに反射された反射波のレベルが所定の受信信号レベル以上となるサンプルタイミングを選択する到来時間方向選択部と、を更に備えるレーダ装置。
【図1】

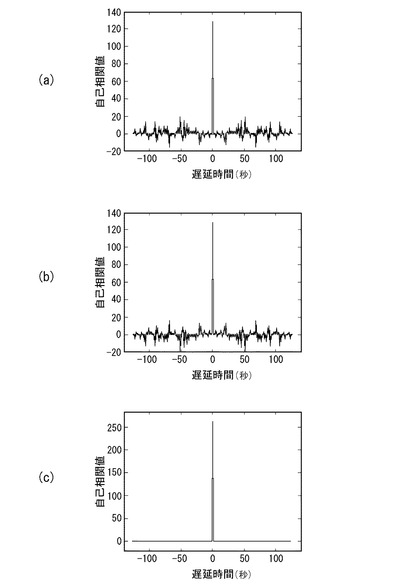
【図2】

【図3】
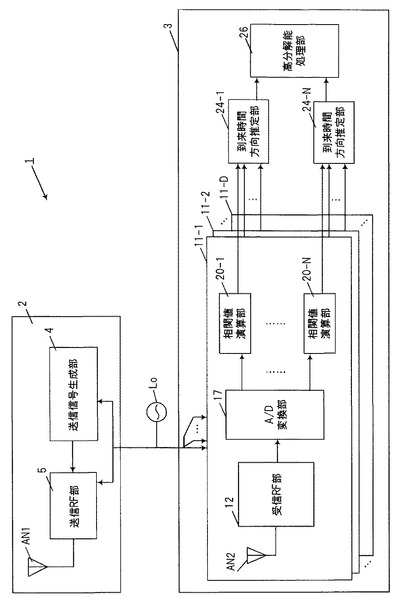
【図4】
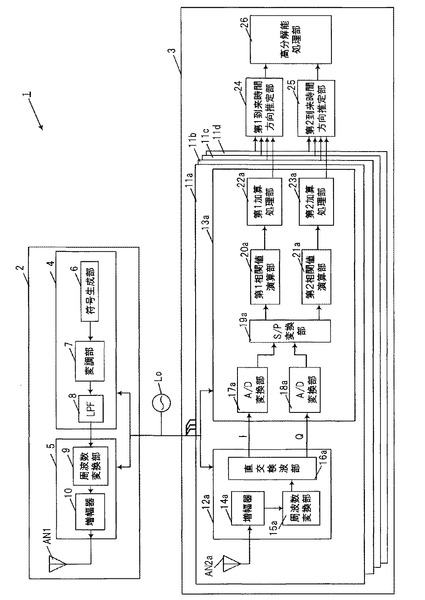
【図5】
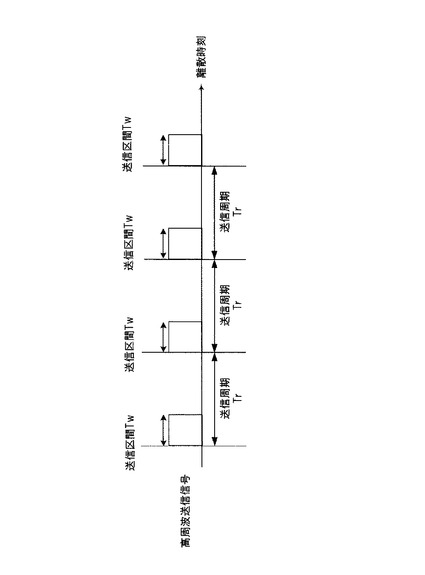
【図6】
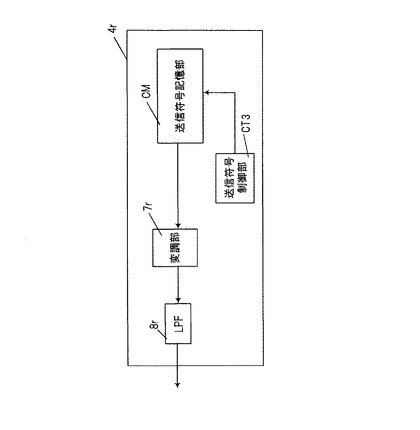
【図7】
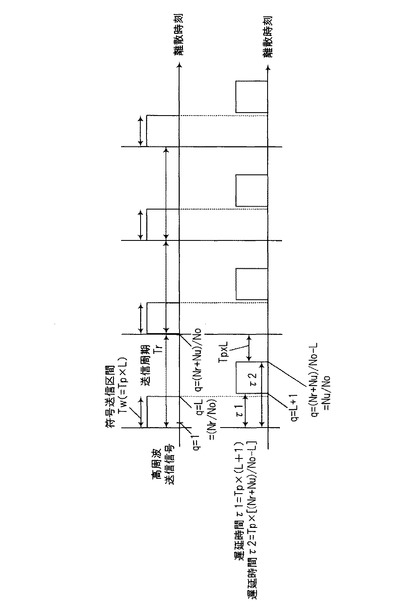
【図8】
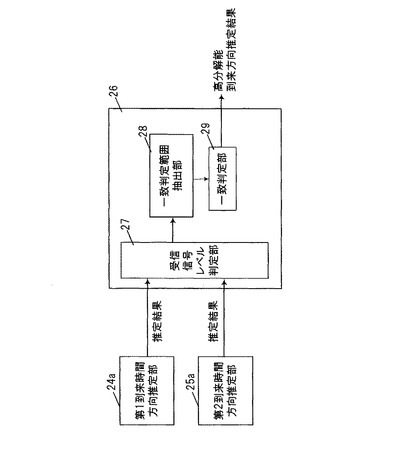
【図9】
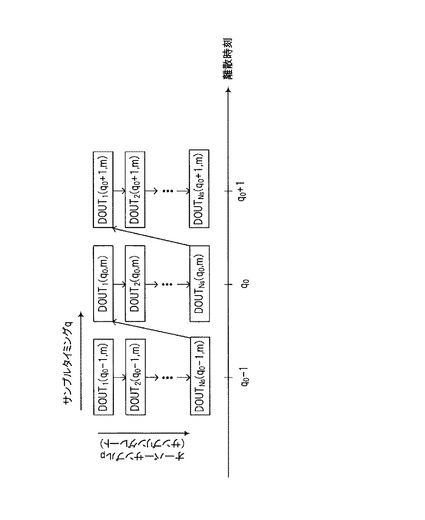
【図10】
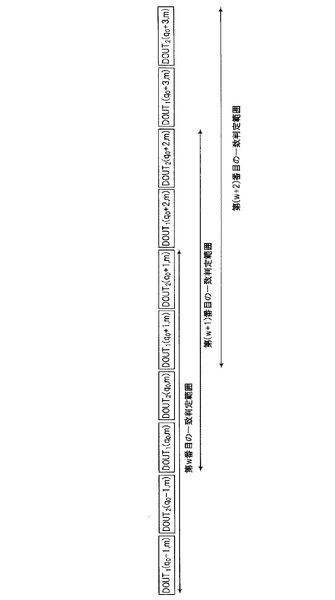
【図11】
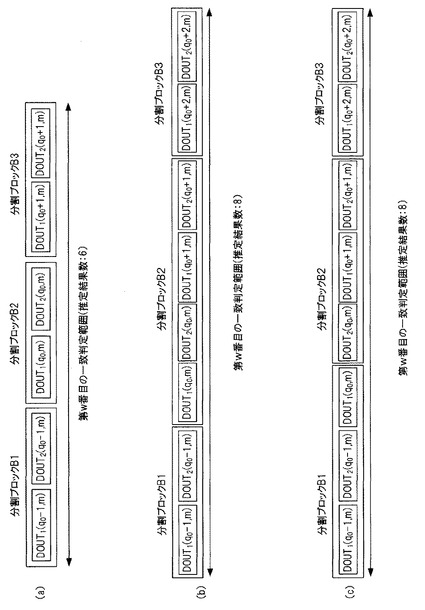
【図12】
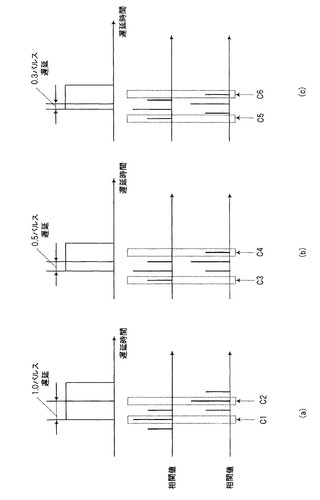
【図13】
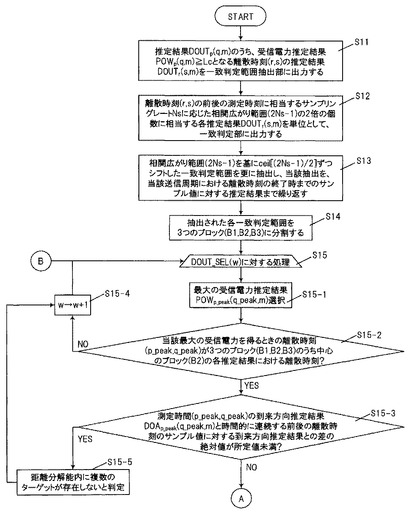
【図14】
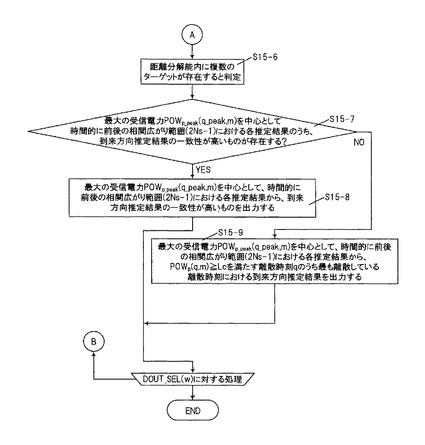
【図15】
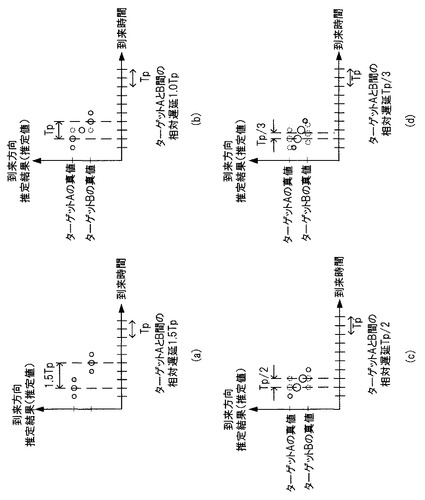
【図16】
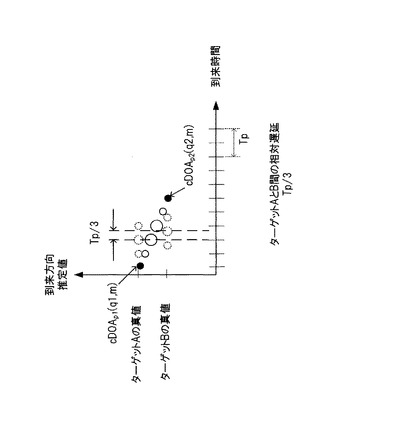
【図17】
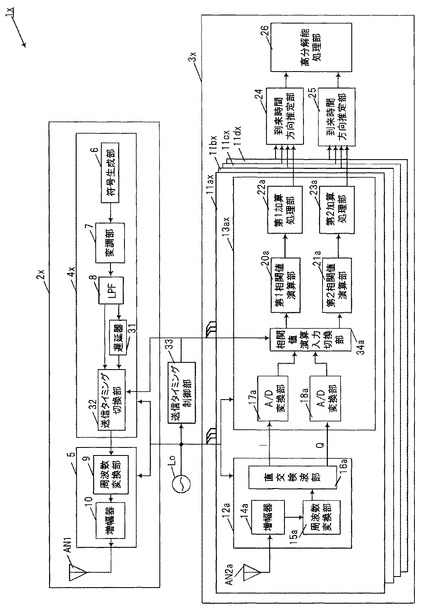
【図18】
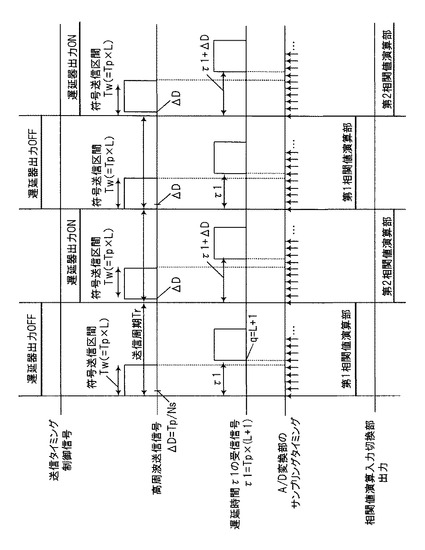
【図19】
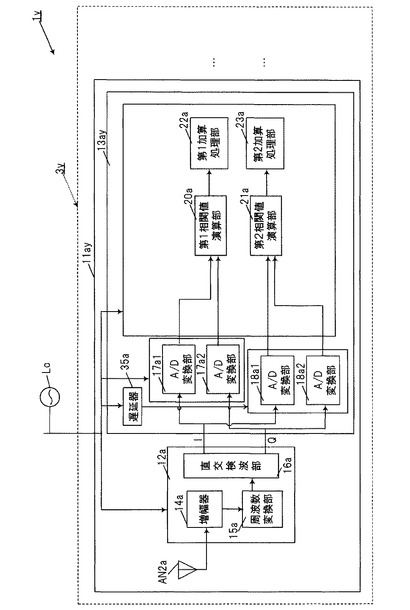
【図20】
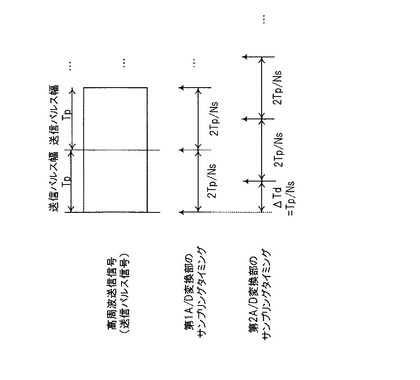
【図21】
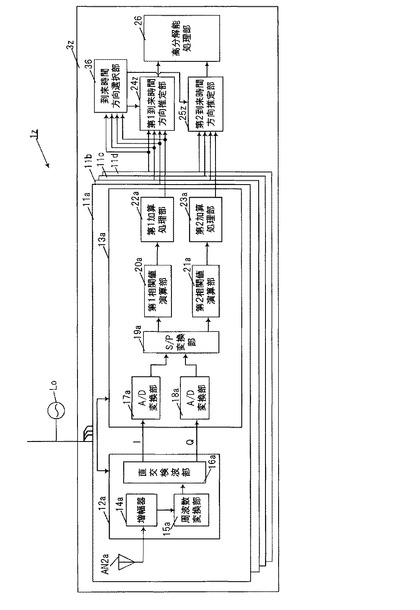
【図22】
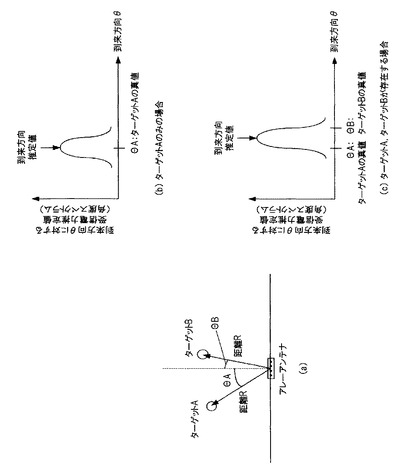
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−154640(P2012−154640A)
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願番号】特願2011−11241(P2011−11241)
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年8月16日(2012.8.16)
【国際特許分類】
【出願日】平成23年1月21日(2011.1.21)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]