
レーダ装置
【課題】並走して走行する対向車を正確に検出することができないという問題が生じていた。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
【解決手段】本発明のレーダ装置は、物標に対して電波を送信する送信アンテナ(14)と、物標からの反射波を受信する受信アンテナ(15)と、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定する先行車検出部(35)と、反射波に基づいて、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する対向車検出部(36)と、を有し、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定されることを特徴とするレーダ装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダ装置に関し、特に車両に搭載され、車両の先行車及び対向車の位置を検出するレーダ装置に関する。
【背景技術】
【0002】
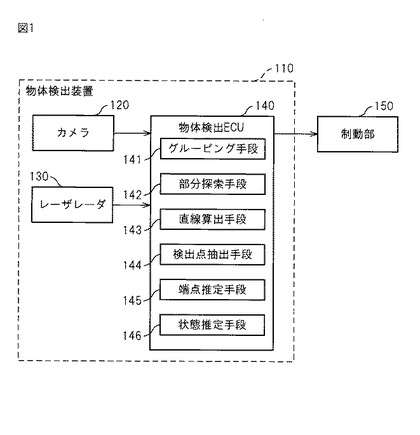
レーダ装置を用いた物標の検出装置として、物標を正確に検出する物体検出装置が報告されている(特許文献1)。図1に示すように、従来の物体検出装置110の物体検出部140は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段141と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段142と、物体検出部140から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段143と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段144とを有する。
【0003】
このような構成とすることにより、レーダを用いた物体検出において物体を正確に検出することができるというものである。
【0004】
また、レーダを応用した技術として先行車両に追随して走行するACC(Adaptive Cruise Control System)や、先行車との距離が近づくと自動的にブレーキをかけて衝突を防止するCMBS(Collision Mitigation Brake System)制御が知られている。このACCやCMBSにおいては、先行して走行する車両(先行車)の位置を正確に把握する必要がある。一般的に車両はサイドミラーを備えており、レーダ装置から先行車に向けて送信された電波は、先行車の後部から反射されるだけでなく、サイドミラーからも反射される。そのため、サイドミラーからの反射波に基づいて検出された物標を、当該ミラーを備えた先行車とは異なる他の物標と認識してしまい、1台の先行車が複数の物標を生じさせ、物標のデータを格納するための容量が不足する場合がある。この問題を解決するために所謂「ミラー判定処理」が行われている。
【0005】
「ミラー判定処理」とは、サイドミラーからの反射波に基づいて検出された物標を、当該ミラーを備えた先行車に基づくものとして扱う処理をいう。ミラー判定処理では、検出された先行車の物標の位置を基準とした所定の範囲を設定し、その範囲内で検出された物標は当該先行車に基づくと仮定し、1つの物標のみを代表させてデータ処理を行う。
【0006】
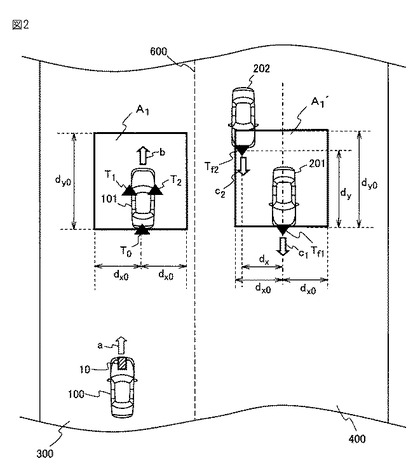
ミラー判定処理について図2を用いて具体的に説明する。図2は車両が走行する車線を上方から俯瞰した様子を示している。車線300には矢印aの方向に向かってレーダ装置10を搭載した自車両100が走行している。また、車線300には矢印aと同じ方向である矢印bの方向に向かって、自車両100に先行して第1の先行車101が走行しているとする。第1の先行車101に向けてレーダ装置10が発射した電波は第1の先行車101の後部で反射するため、検出される物標T0の位置は第1の先行車101の後部となる。
【0007】
一方、第1の先行車101の車体の両側にミラー(サイドミラー)が設けられているとする。ミラーは電波を強く反射するため、レーダ装置10から発射された電波はミラーで反射され物標T1、T2が検出される。検出された物標T1、T2のデータを第1の先行車101の物標T0のデータと共に記憶するとすれば、先行車1台につき3個の物標のデータを記憶する必要が生じる。ここで、レーダ装置で記憶することができる物標の数は10個程度であるので、1台の車両につき3個の物標を記憶しておくことは好ましくない。そこで、ミラー判定処理においては、ミラーからの反射によって検出された物標T1、T2は第1の先行車101に基づくものであるとして、第1の先行車101の物標T0のデータを代表させてデータ処理を行う。
【0008】
このようなミラー判定処理では、図2に示すように、第1の先行車101の物標T0の位置を基準として、所定の範囲、例えば、物標T0の位置を基準として、自車両100から見て横方向に±dx0、縦方向にdy0の範囲A1内において検出された物標を物標T0と同一とみなす処理を行う。ここで、一例として横方向の幅2dx0は2.5[m]である。この先行車と同一とみなす所定の範囲を「先行車判定範囲」と呼ぶことにする。先行車判定範囲を車両のミラーを含む範囲に設定することにより、先行車のミラーからの反射に基づく物標を先行車と同一とみなすことができ、レーダ装置が処理すべきデータの数を実際の先行車の数に適合させることができる。
【0009】
従来のミラー判定処理は、レーダ装置が搭載された自車両と同じ進行方向に向かって走行する先行車を対象とするものであった。一方、自車両と他の車両との衝突を回避するためには、自車両に向かって移動する「対向車」の位置を正確に検出することが重要である。特に、対向車は自車両に向かって急速に接近してくるため、その位置を短時間に正確に検出することが望ましい。しかしながら、対向車に対して従来のミラー判定処理を適用すると、以下のように対向車の位置を正確に検出することができないという問題が生じた。
【0010】
図2に示すように、対向車線400上を第1の対向車201及び第2の対向車202がそれぞれ自車両100の進行方向とは反対の方向である矢印c1、c2の方向に走行し、検出された物標の位置をそれぞれTf1、Tf2とする。ここで、対向車に対しても先行車と同じ大きさの範囲である先行車判定範囲を設定してミラー判定処理を行うと、物標Tf1の位置を基準として、横方向に±dx0、縦方向にdy0の範囲A1´において検出された物標は基準とした物標Tf1と同一とみなすこととなる。Tf1、Tf2の横方向の間隔(横位置差)dxがdx0より小さく、縦方向の間隔(縦位置差)dyがdy0より小さい場合には、Tf2の位置は範囲A1´に含まれることとなり、ミラー判定処理により、第2の対向車202は第1の対向車201と同一と判定され、第2の対向車202の位置を把握することができなくなる。その結果、第2の対向車202が自車両100側に接近した場合に、衝突の回避行動の開始が遅れる原因となっていた。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2010−32429号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記のように、従来のミラー判定処理を対向車の検出にそのまま適用してしまうと、対向車の位置を正確に検出することができないという問題が生じていた。
【課題を解決するための手段】
【0013】
本発明のレーダ装置は、物標に対して電波を送信する送信アンテナと、物標からの反射波を受信する受信アンテナと、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定し、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する検出部と、を備え、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定される、ことを特徴とする。
【発明の効果】
【0014】
本発明のレーダ装置は、並走して走行する対向車をそれぞれ個別の車両として早期に検出することができるという利点がある。
【図面の簡単な説明】
【0015】
【図1】従来の物体検出装置の構成図である。
【図2】先行車及び対向車をレーダ装置により検出する場面を説明するための図面である。
【図3】本発明の実施例1に係るレーダ装置の構成図である
【図4】本発明の実施例1に係るレーダ装置の検出部の構成図である。
【図5】本発明の実施例1に係るレーダ装置において、先行車及び対向車を検出する方法を説明するための車両の俯瞰図である。
【図6】本発明の実施例1に係るレーダ装置において、先行車及び対向車を検出する方法を説明するためのレーダ装置の検出結果を表す図である。
【図7】本発明の実施例1に係るレーダ装置において、対象物標が先行車であるか対向車であるかを判定する手順を示すフローチャートである。
【図8】反射波の信号強度の角度依存性を示す図である。
【図9】本発明の実施例1に係るレーダ装置において、先行車を検出する方法を説明するためのフローチャートである。
【図10】本発明の実施例1に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【図11】本発明の実施例2に係るレーダ装置の検出部の構成を示す図である。
【図12】並走する対向車をレーダ装置により検出する場面を説明するための図面である。
【図13】本発明の実施例2に係るレーダ装置において、先行車を検出する方法を説明するためのフローチャートである。
【図14】本発明の実施例2に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【図15】本発明の実施例2に係るレーダ装置において、カウンタのカウント数の時間依存性を示す図である。
【図16】並走する対向車をレーダ装置により検出する場面を説明するための図面である。
【図17】並走する対向車をレーダ装置で検出した結果を表す図である。
【図18】本発明の実施例3に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明に係るレーダ装置について説明する。ただし、本発明の技術的範囲はそれらの実施の形態には限定されず、特許請求の範囲に記載された発明とその均等物に及ぶ点に留意されたい。
【実施例1】
【0017】
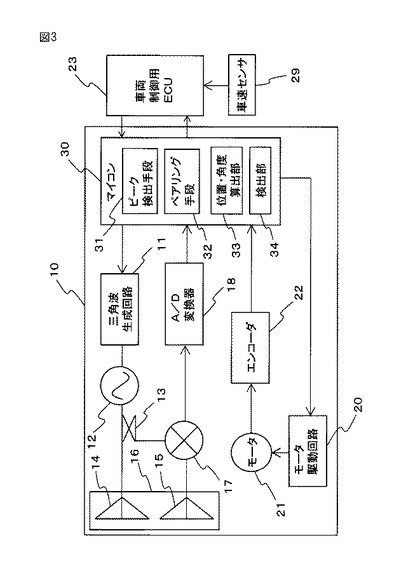
まず、本発明の実施例1に係るレーダ装置について、図面を用いて説明する。図3は、本発明の実施例1に係るレーダ装置の構成図である。本発明のレーダ装置は、マイコン30の内部に検出部34を備えている点を特徴としている。本実施例では、アンテナの駆動方法としてメカスキャン方式を採用した場合について説明する。電圧制御発振器(VCO)12に三角波生成回路11からFM信号を供給して、送信波を送信アンテナ14から車両前方へ送信する。車両の前方の物標に当たって反射した反射波を受信アンテナ15で受信し、これと送信波とを方向性結合器13を介してミキサ17で混合することによりビート信号を得る。ビート信号はA/D変換器18でA/D変換され、マイコン30に入力される。ここで、ビート信号から、ピーク検出手段31において検出されたピークデータを用いて、ペアリング手段32において物標の検出が行なわれ、位置・角度算出部33において、自車両と物標との相対距離、相対速度及び角度が算出される。
【0018】
所定の角度範囲の物標を検出できるように、送信アンテナ14及び受信アンテナ15を左右に振り、送信アンテナ14及び受信アンテナ15が同じ方向を向くように、モータ駆動回路20により制御されたモータ21で駆動する。モータ21の駆動状況は、エンコーダ22を介してモータ21からの信号をマイコン30に入力することによりフィードバックされ、アンテナの角度範囲やその周期の制御が行なわれる。
【0019】
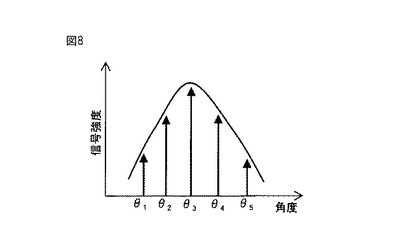
ここで、物標の角度は、図8に示すように、送信アンテナを水平方向に振って角度をθ1,θ2,…,θ5と変えながら受信信号の強度を測定し、信号強度がピークを示す角度(図8の例ではθ3)を物標が存在する角度として検出することができる。
【0020】
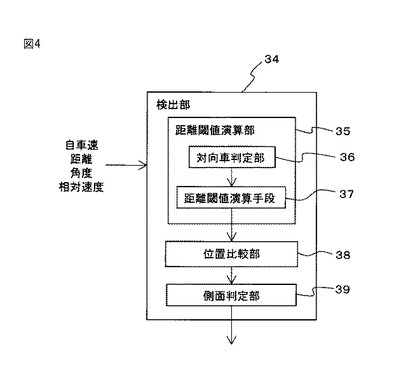
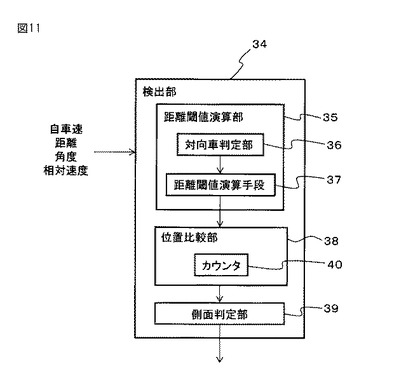
次に、本発明の実施例1に係るレーダ装置の検出部について図面を用いて説明する。図4に示すように、本発明の実施例1に係るレーダ装置の検出部34は、距離閾値演算部35と、位置比較部38と、側面判定部39とを備えており、距離閾値演算部35は、対向車判定部36と、距離閾値演算手段37とを備えている。
【0021】
対向車判定部36は、検出した位置及び相対速度から、物標が先行車か対向車かを判定する。距離閾値演算手段37は、検出した物標が先行車か対向車かに応じて、先行車判定範囲または対向車判定範囲を決定するための距離に関する閾値を算出する。位置比較部38は、検出した物標の距離及び角度から、物標が先行車判定範囲内または対向車判定範囲内に存在するか否かを判定する。側面判定部39は、検出した物標が先行車判定範囲内または対向車判定範囲内に存在するか否かに基づいて、対象物標と、検出した先行車または対向車の物標との同一性を判定する。本発明においては、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定する点を特徴としている。
【0022】
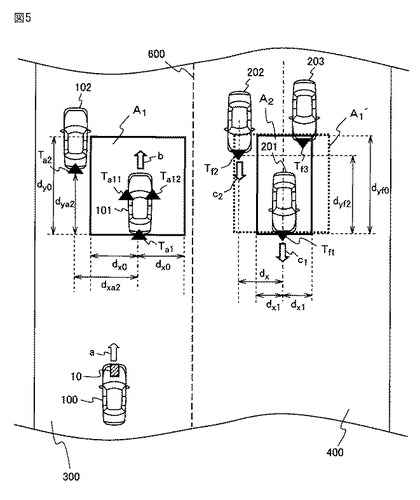
次に、本発明の実施例1に係るレーダ装置において、先行車を検出する方法について図5を用いて説明する。図5は先行車を検出する場面を説明するための図であり、車道を走行する車両を上方から俯瞰した様子を示している。レーダ装置10を搭載した自車両100は車線300上を速度60[km/h]で矢印aの方向に向かって走行しており、第1の先行車101及び第2の先行車102が車線300上を速度40[km/h]で矢印bの方向に向かって走行しているとする。図5には、対向車線400上を走行する第1の対向車201、第2の対向車202も併せて記載している。
【0023】
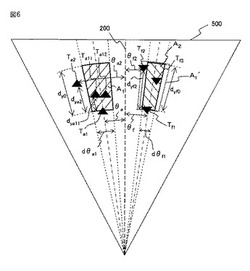
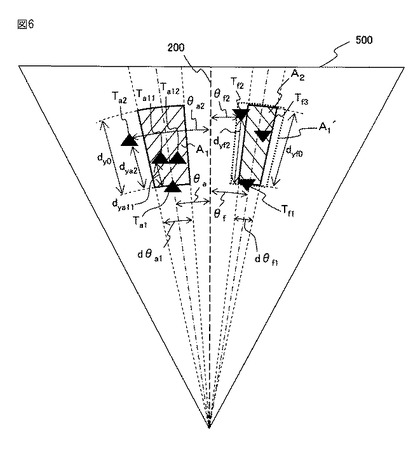
レーダ装置10が、第1の先行車101及び第2の先行車102に対して電波を送信し、反射波から物標Ta1、Ta11、Ta12、Ta2を検出したとすると、検出結果はレーダ装置において図6のように認識される。なお、実際には第2の先行車102のミラーからも物標が検出されるが、ここでは説明を簡単にするために省略する。図6はレーダ装置が検出した物標の位置を示した図であり、表示領域500内において自車両を基準とした角度0の方向を基準線200で表し、物標の位置及び角度に応じて物標のマーク(上向きの三角形または下向きの三角形)がプロットされている。
【0024】
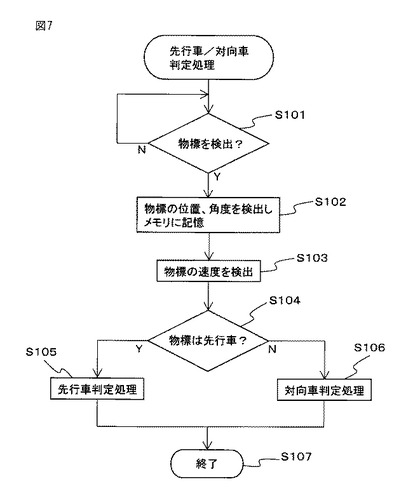
実施例1のレーダ装置における物標の検出方法について説明する。まず、レーダ装置が検出した物標が先行車であるか対向車であるかを判定する。この判定処理は、対向車判定部36が、マイコン30内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。図7は、物標が先行車であるか対向車であるかを判定する処理手順のフローチャートである。まず、ステップS101において、レーダ装置10が物標を検出したか否かを判定する。物標が検出されたか否かは、図8のように、ある角度で信号強度がピークを有する反射波の有無によって判定することができる。物標が検出されなかった場合は、ステップS101のまま物標の検出を再度試みる。物標が検出された場合は、ステップS102において、物標の相対速度、距離、角度を検出してメモリ(図示せず)に記憶する。物標の相対速度、距離はFM−CW波のピーク検出手段31及びペアリング手段32によって検出できる(図3参照)。一方、物標の角度は反射波のピークの角度から求めることができる。図8の例では、複数の角度θ1〜θ5でピークが検出され、その中でピークが最大となる角度はθ3であるので、物標が存在する角度はθ3と求めることができる。物標の位置は、検出した距離及び角度から求めることができる。
【0025】
次に、ステップS103において、物標の速度を算出する。具体的には物標の相対速度と自車両の速度から速度を算出する。次に、ステップS104において、物標の速度及び自車両の速度から、検出した物標が先行車であるか否かを判定する。例えば、図5に示すように物標Ta1が自車両100に向かって相対速度20[km/h]で接近している場合、自車両100は速度60[km/h]で走行しているので、物標Ta1は自車両100と同じ方向に速度40[km/h]で走行していると判定でき、物標Ta1は先行車に基づくものと判定できる。検出した物標が自車両に先行して移動する物標(先行物標)である場合は、ステップS105において、先行車判定処理を行う。一方、検出した物標が自車両とは反対方向に移動する物標(対向物標)である場合は、ステップS106において、対向車判定処理を行う。
【0026】
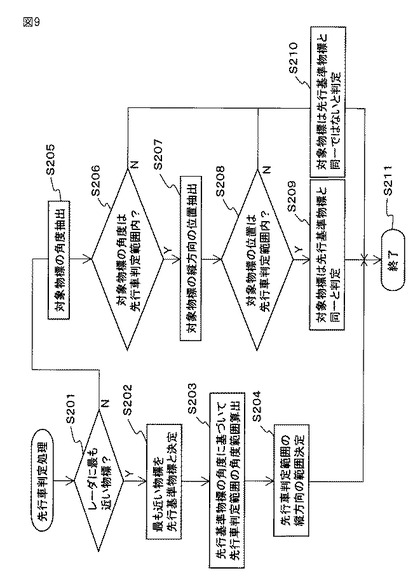
次に、先行車判定処理について図9のフローチャートを用いて説明する。先行車判定処理は検出部34内のメモリ(図示せず)に格納されたプログラムを実行することより行われる。ここでは、自車両と同じ方向に移動する物標が複数検出されたと仮定する。まず、ステップS201において、距離閾値演算手段37が、先行車と判定された物標のそれぞれについて、自車両に最も近い位置に存在する物標であるか否かを判定する。対象としている物標が自車両に最も近い位置に存在する物標である場合には、ステップS202において、距離閾値演算手段37が、対象としている物標を先行基準物標と決定する。先行基準物標は、先行基準物標以外に検出された物標(対象物標)と先行基準物標との同一性を判定するための範囲を決めるために基準とする物標である。自車両に最も近い位置に存在する物標を先行基準物標としているのは、自車両に最も近い先行車が自車両と衝突する危険性が最も高いためである。
【0027】
次に、ステップS203において、距離閾値演算手段37が、先行車判定範囲の角度範囲を算出する。先行車判定範囲は、対象物標と先行基準物標との同一性を判定するための範囲である。具体的には、まず、図6に示すように先行基準物標の角度θaに基づいて所定の横方向の範囲dθa1を決定する。先行車判定範囲A1を図5に示すように先行基準物標Ta1を基準として、横方向に+dx0、−dx0の範囲とした場合、横方向の範囲2dx0に相当する角度dθa1を以下のようにして算出する。
dθa1=2sin-1(dx0)/xa1 (1)
ここで、xa1は、自車両100から先行基準物標Ta1までの距離である。また、一例として、先行車判定範囲A1の横方向の幅2dx0は1.8[m]である。
【0028】
次に、ステップS204において、距離閾値演算手段37が、先行車判定範囲A1の縦方向の範囲を決定する。縦方向の範囲は先行基準物標Ta1の位置から進行方向へ所定の距離dy0の範囲とする。先行車判定範囲A1は図6においてハッチングされた範囲で表される。なお、縦方向の範囲dy0は、先行基準物標Ta1の速度に合わせて設定してもよい。即ち、先行基準物標Ta1の速度が大きい場合は縦方向の範囲dy0を大きく設定し、先行基準物標Ta1の速度が小さい場合は縦方向の範囲dy0を小さく設定する。このようにすることで、先行基準物標の速度に応じて適切に先行車判定範囲を設定することができる。
【0029】
ステップS201において、対象物標がレーダ装置に最も近い物標ではないと判定された場合は、対象物標が先行基準物標を基準とした所定の先行車判定範囲内に存在するか否かを調べることにより、対象物標と先行基準物標との同一性を判定する。まず、位置比較部38が、ステップS205において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象物標の角度を抽出し、ステップS206において、対象物標の角度が先行車判定範囲A1内か否かを判定する。例えば、図6に示すように、対象物標Ta2の角度θa2は、θa2>θa+dθa1/2となっていることがわかる。その結果、対象物標Ta2は先行車判定範囲A1内には存在しないと判定され、ステップS210において、側面判定部39が、対象物標Ta2は先行基準物標と同一ではないと判定する。
【0030】
一方、対象物標がTa11である場合、その角度θa11が以下の式を満たす範囲である場合には、対象物標の角度は先行車判定範囲A1内にあると判定される。
θa−dθa1/2 ≦ θa11 ≦ θa+dθa1/2 (2)
【0031】
この場合、位置比較部38が、ステップS207において、対象物標Ta11の縦方向の位置dya11を予めデータを保存した(図7のS102)メモリ(図示せず)から抽出し、ステップS208において、対象物標Ta11の縦方向の位置が先行車判定範囲A1内にあるか否かを判定する。対象物標Ta11の縦方向の位置dya11が、以下の式を満たす場合、対象物標Ta11の縦方向の位置は先行車判定範囲A1内にあると判定される。
0 ≦ dya11 ≦ dy0 (3)
【0032】
対象物標Ta11の縦方向の位置が先行車判定範囲A1内である場合は、側面判定部39が、ステップS209において、対象物標Ta11は、先行基準物標と同一と判定する。
【0033】
図5及び図6に示した例では、物標Ta2、Ta11のうち、物標Ta2は先行車判定範囲A1の外部に存在することから、先行車である物標Ta1とは別の物標であると判定され、物標Ta11は先行車判定範囲A1の内部に存在することから、先行車である物標Ta1と同一の物標であると判定される。図5及び図6に示すように、物標Ta12も先行車判定範囲A1の内部に存在することから、先行車である物標Ta1と同一の物標であると判定される。その結果、物標Ta11及びTa12はデータ処理の対象とはせず、物標Ta1を代表してデータ処理を行うことができる。
【0034】
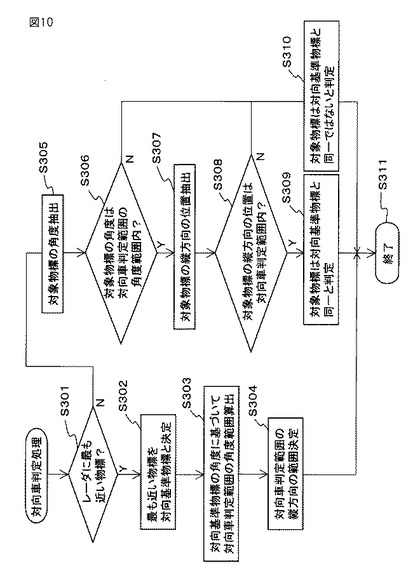
次に、自車両に向かって移動する物標の検出方法について説明する。図7に示したフローチャートのステップS104において、検出した物標が自車両に向かって移動している場合には、対向車判定部36が、その物標は対向車であると判断し、ステップS106において対向車判定処理が実行される。対向車判定処理について図10のフローチャートを用いて説明する。対向車判定処理は検出部34内のメモリ(図示せず)に格納されたプログラムを実行することより行われる。まず、ステップS301において、距離閾値演算手段37が、対向車と判定された物標が自車両に最も近い位置に存在する物標であるか否かを判定する。検出された物標が自車両に最も近い位置に存在する物標である場合には、ステップS302において、距離閾値演算手段37が、検出された物標を対向基準物標と決定する。自車両に最も近い位置に存在する物標を基準としているのは、自車両に最も近い対向車が、自車両と衝突する危険性が最も高いためである。
【0035】
次に、ステップS303において、距離閾値演算手段37が、対向車判定範囲の角度範囲を決定する。対向車判定範囲は、対象物標と対向基準物標との同一性を判定するための範囲である。具体的には、まず、図6に示すように対向基準物標Tf1の角度θfに基づいて所定の横方向の範囲dθf1を決定する。対向車判定範囲A2を図5に示すように対向基準物標Tf1を基準として、横方向に±dx1の範囲とした場合、横方向の範囲2dx1に相当する角度dθf1を以下のようにして算出する。
dθf1=2sin-1(dx1)/xf1 (4)
ここで、xf1は、自車両100から対向基準物標Tf1までの距離である。
【0036】
次に、ステップS304において、距離閾値演算手段37が、対向車判定範囲A2の縦方向の範囲を決定する。縦方向の範囲は対向基準物標Tf1の位置から自車両の進行方向に所定の距離dyf0の範囲とする。対向車判定範囲A2は図6においてハッチングされた範囲で表される。縦方向の範囲dyf0は、対向基準物標Tf1の速度に合わせて設定してもよい。即ち、対向基準物標Tf1の速度が大きい場合は縦方向の範囲dyf0を大きく設定し、対向基準物標Tf1の速度が小さい場合は縦方向の範囲dyf0を小さく設定する。このようにすることで、対向基準物標の速度に応じて適切に対向車判定範囲を設定することができる。
【0037】
ここで、本発明においては、対向車判定範囲A2を先行車判定範囲A1よりも狭くなるように設定している点を特徴としている。具体的には図5に示すように、先行車判定範囲A1を規定する横方向の距離をdx0とし、対向車判定範囲A2を規定する横方向の距離をdx1とすると、dx1<dx0となるように先行車判定範囲A1及び対向車判定範囲A2を設定する点を特徴としている。
【0038】
ステップS301において、対象物標がレーダ装置に最も近い物標ではないと判定された場合は、対象物標が対向基準物標を基準とした所定の対向車判定範囲内に存在するか否かを調べることにより、対象物標と対向基準物標との同一性を判定する。まず、位置比較部38が、ステップS305において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象物標の角度を抽出し、ステップS306において、対象物標の角度が対向車判定範囲内か否かを判定する。例えば、図6に示すように、対象物標Tf2の角度θf2は、θf2<θf−dθf1/2となっていることがわかる。その結果、対象物標Tf2は対向車判定範囲A2内には存在しないと判定され、ステップS310において、側面判定部39が、対象物標Tf2は対向基準物標Tf1と同一ではないと判定する。
【0039】
なお、対象物標が第3の対向車203であってその物標がTf3であるとき、その角度θf3が以下の式を満たす範囲である場合には、対象物標の角度は対向車判定範囲A2内にあると判定される。
θf−dθf1/2 ≦ θf3 ≦ θf+dθf1/2 (5)
この場合、位置比較部38が、ステップS307において、対象物標Tf3の縦方向の位置dyf3を予めデータを保存した(図7のS102)メモリ(図示せず)から抽出し、ステップS308において、対象物標Tf3の縦方向の位置dyf3が対向車判定範囲A2内にあるか否かを判定する。対象物標Tf3の縦方向の位置dyf3が、以下の式を満たす場合、対象物標Tf3の縦方向の位置は対向車判定範囲A2内にあると判定される。
0 ≦ dyf3 ≦ dyf0 (6)
対象物標Tf3の縦方向の位置dyf3が対向車判定範囲A2内である場合は、ステップS309において、側面判定部39が、対象物標Tf3は対向基準物標Tf1と同一と判定する。
【0040】
図5及び図6に示した例では、物標Tf2、Tf3のうち、物標Tf2は対向車判定範囲A2の外部に存在することから、対向車である物標Tf1とは別の物標であることが判定され、物標Tf3は対向車判定範囲A2の内部に存在することから、対向車である物標Tf1と同一の物標であると判定される。
【0041】
図5及び図6には、本発明により設定した対向車判定範囲A2と従来の先行車判定範囲をそのまま対向車側に設定した場合の範囲A1´とを示している。物標Tf2は、従来の先行車判定範囲をそのまま対向車側に設定した場合の範囲A1´に含まれるため、従来の処理方法では対向基準物標Tf1と同一と判定されて検出することができなかった。一方、物標Tf2は、本発明により設定した対向車判定範囲A2の外部に存在するため、対向基準物標Tf1とは異なる物標として検出することができる。
【0042】
以上のように、本発明の実施例1に係るレーダ装置によれば、対向車の同一性を判定するための対向車判定範囲を先行車の同一性を判定するための先行車判定範囲よりも狭くしているために、対向車線に検出済みの対向車以外の他の対向車に基づく物標(対向物標)を検出した場合に、他の対向車を検出済みの対向車と同一車両であると誤って認識することを防止することができる。
【実施例2】
【0043】
次に、本発明の実施例2に係るレーダ装置の検出部について説明する。図11は、本発明の実施例2に係るレーダ装置の検出部の構成図である。検出部34は、距離閾値演算部35と、位置比較部38と、側面判定部39とを備えており、距離閾値演算部35は、対向車判定部36と、距離閾値演算手段37とを備えている。さらに、実施例2のレーダ装置の検出部は、位置比較部38がカウンタ40を備えている点を特徴としている。他の構成は実施例1と同様であるので詳細な説明は省略する。
【0044】
次に、本発明の実施例2に係るレーダ装置を用いた物標の検出方法について説明する。本発明の実施例2に係るレーダ装置は、検出部が、自車両と同一方向に移動する物標を先行車判定範囲外で検出した回数が所定の先行車判定回数を超えた場合に、当該物標は先行基準物標と同一ではないと判定し、自車両と反対方向に移動する物標を対向車判定範囲外で検出した回数が所定の対向車判定回数を超えた場合に、当該物標は対向基準物標と同一ではないと判定し、対向車判定回数は、先行車判定回数よりも小さくなるように設定する点を特徴としている。
【0045】
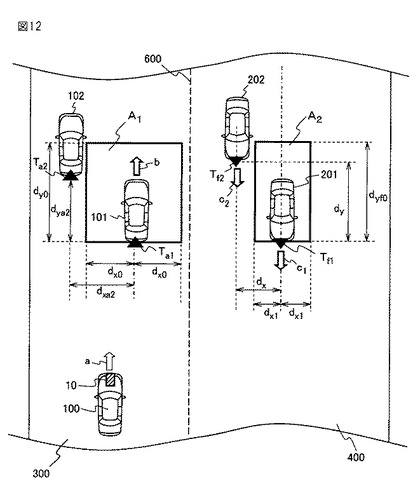
まず、先行車の検出方法について説明するために自車両と先行車両との位置関係について説明する。図12に走行する車両を上方から俯瞰した様子を示す。図12に示すように、レーダ装置10を搭載した自車両100の前方を第1の先行車101及び第2の先行車102が走行しているとする。また、自車両100に最も近い位置に存在する第1の先行車101について検出された物標Ta1の位置を基準として、先行車判定範囲A1が規定されているとする。
【0046】
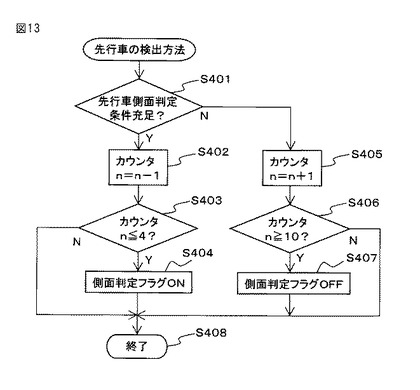
次に、先行車の検出方法について、図13のフローチャートを用いて説明する。この先行車の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。まず、ステップS401において、側面判定部39が、検出した物標が先行車側面判定条件を充足しているか否かを判定する。ここで「先行車側面判定条件」とは、対象物標が先行車判定範囲A1内に存在することをいう。対象物標を第2の先行車102についての物標Ta2とすると、対象物標Ta2は先行車判定範囲A1内に存在していないため、ステップS405において、カウンタ40がカウント数nを1つ増加させる。なお、カウント数nの初期値は0である。
【0047】
次に、ステップS406において、側面判定部39が、カウント数nが10以上であるか否かを判定する。カウント数nが10以上である場合は、ステップS407において、側面判定部39が、対象物標Ta2は先行基準物標Ta1と同一ではないと判定し、側面判定フラグをOFFとする。ここで、側面判定フラグとは、対象物標が先行基準物標と同一である可能性が高いことを示すためのフラグである。ステップS407において、側面判定フラグをOFFとするのは、一旦、対象物標が先行基準物標と同一ではないと判定した以上、その判定を覆さないようにするためである。一方、ステップS406において、カウント数nが10未満である場合は、側面判定フラグをOFFとすることなく、次の検出を行う。
【0048】
ステップS401において、側面判定部39が、対象物標Ta2は側面判定条件を充足していると判定した場合には、ステップS402において、カウンタ40がカウント数nを1つ減算する。次に、ステップS403において、側面判定部39が、カウンタのカウント数nが4以下であるか否かを判定する。nが4以下である場合は、側面判定フラグをONとする。側面判定フラグをONとするのは、対象物標が先行基準物標と同一である可能性が高いことを表すためである。
【0049】
このように、先行車の判定においては、対象物標が先行車判定範囲外で10回検出された場合に、先行基準物標とは同一ではないと判定している。即ち、検出部は、物標を先行車判定範囲外で検出した回数が所定の先行車判定回数(10回)を超えた場合に、対象物標が他の先行車に基づくものであると判定している。
【0050】
次に、対向車の検出方法について説明するために自車両と対向車両との位置関係について説明する。図12に走行する車両を上方から俯瞰した様子を示す。図12に示すように、レーダ装置10を搭載した自車両100の前方を第1の対向車201及び第2の対向車202が対向車線400上を走行しているとする。また、自車両100に最も近い位置に存在する第1の対向車201の検出された物標Tf1の位置を基準として、対向車判定範囲A2が規定されているとする。
【0051】
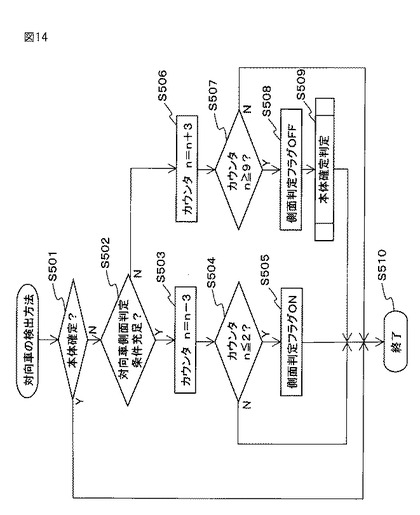
次に、対向車の検出方法について、図14のフローチャートを用いて説明する。この対向車の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。まず、ステップS501において、側面判定部39が、対象物標が本体確定されているか否かを判定する。ここで「本体確定」とは、対象物標が過去において既に対向基準物標と同一であると確定されたことをいい、本体確定されているか否かに関する情報は、対象物標に関するデータとしてメモリ内に格納されている。対象物標が、既に本体確定されている場合にはステップS510において対象物標の対向基準物標との同一性の判定処理を終了する。
【0052】
側面判定部39が、対象物標が本体確定されていないと判定した場合には、ステップS502において、検出した物標が対向車側面判定条件を充足しているか否かを判定する。ここで「対向車側面判定条件」とは、対象物標が対向車判定範囲A2内に存在することをいう。対象物標を第2の対向車202の物標Tf2とすると、図12に示すように、物標Tf2は対向車判定範囲A2内に存在していないため、ステップS506において、カウンタ40がカウント数nを3つ増加させる。なお、カウンタ数nの初期値は0である。
【0053】
次に、ステップS507において、側面判定部39が、カウント数nが9以上であるか否かを判定する。カウント数nが9以上である場合は、ステップS508において、側面判定部39が、対象物標Tf2は対向基準物標Tf1と同一ではないと判定し、側面判定フラグをOFFとする。ここで、対象物標Tf2が対向車判定範囲A2内で1回検出されるたびにカウント数nを3つ増加させているので、検出回数が3回でカウント数nは9以上となる。ステップS508において、側面判定フラグをOFFとするのは、一旦、対象物標が対向基準物標と同一ではないと判定した以上、その判定を覆さないようにするためである。一方、ステップS507において、カウント数nが9未満である場合は、側面判定フラグをOFFとすることなく、次の検出を行う。
【0054】
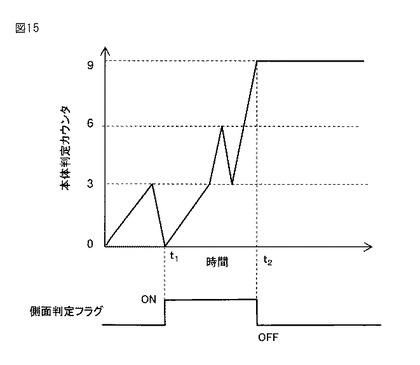
カウンタ40のカウント数nの時間的変化の一例を図15に示す。図15に示すように側面判定フラグは、カウント数n≦2となった時刻t1でONとされるが、n≧9となった時刻t2で本体と確定されてOFFとされる。
【0055】
ステップS502において、側面判定部39が、対象物標は対向車側面判定条件を充足していると判定した場合には、ステップS503において、カウンタ40がカウント数nを3つ減算する。次に、ステップS504において、側面判定部39が、カウンタのカウント数nが2以下であるか否かを判定する。nが2以下である場合は、ステップS505において、側面判定フラグをONとする。側面判定フラグをONとするのは、対象物標が対向基準物標と同一である可能性が高いことを表すためである。
【0056】
このように、対向車の判定においては、対象物標が対向車判定範囲外で3回検出された場合に他の対向車であると判定している。即ち、検出部は、対象物標を対向車判定範囲外で検出した回数が所定の対向車判定回数(3回)を超えた場合に、対象物標が他の対向車に基づくものであると判定している。
【0057】
ここで、レーダ装置が一定の時間間隔で複数回、電波を送信するとした場合、対向車検出部が、対向物標が対向車判定範囲外で検出された期間が所定の対向車判定期間を超えたときに、対向物標を他の対向車と判定する対向車判定期間は、先行車検出部が、先行物標が先行車判定範囲外で検出された期間が所定の先行車判定期間を超えたときに、先行物標を他の先行車と判定する先行車判定期間よりも短いこととなる。従って、本発明の実施例2に係るレーダ装置においては、対向車判定回数を先行車判定回数より少なくすることにより、対向車を短時間で検出することができる。
【0058】
また、上記の説明において、先行車判定回数を10回とし、対向車判定回数を3回とした例を示したが、これには限られず、対向物標を対向車判定範囲の外部で最初に検出されてから対向車であると判定するまでの時間が、先行物標を先行車判定範囲の外部で最初に検出されてから先行車であると判定するまでの時間よりも短く設定することができればよい。対向車は先行車よりも相対速度が速いため、対向車に対する判定をより早期に行うことができる。これにより、ACCやCMBSの制御をより安全に行うことができる。
【0059】
以上の説明においては、物標が先行車判定範囲の外部または対向車判定範囲の外部で検出された場合にカウンタの数を増加させる例について説明したが、物標が先行車判定範囲の内部または対向車判定範囲の内部で検出された場合にカウンタの数を減少させる構成を付加するようにしてもよい。このようにすることで、ノイズ等による影響により一旦誤ってカウンタのカウント数を増加させてしまった場合でも、カウンタのカウント数を減少させることにより、誤った判定結果を修正することができる。
【実施例3】
【0060】
次に、本発明の実施例3に係るレーダ装置の検出部について説明する。実施例3に係るレーダ装置においては、検出部は、対向物標の位置が、対向車の位置を基準とした所定の対向車本体確定範囲外にある場合には、即時に対象物標は基準とした対向車とは異なると判定し、所定の対向車本体確定範囲は対向車判定範囲よりも広い点を特徴としている。本発明の実施例3に係るレーダ装置の検出部の構成は実施例1と同様であるので詳細な説明は省略する。
【0061】
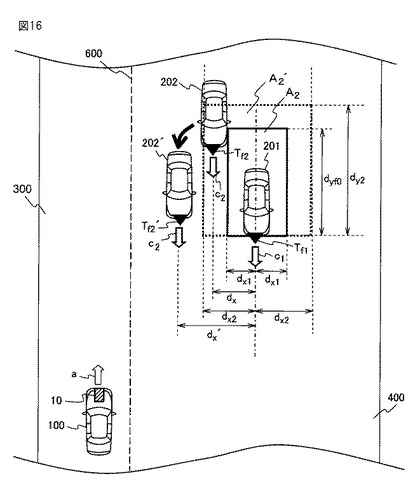
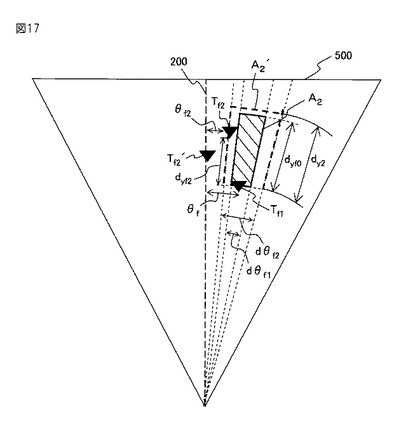
本発明の実施例3に係るレーダ装置の検出部の動作方法について図16を用いて説明する。図16は、対向車線400上を走行する第1の対向車201及び第2の対向車202を上方から俯瞰した図である。同図において、第2の対向車202は第1の対向車201の後方を走行し、202→202´と移動する様子を示している。また、図17に、レーダ装置の検出結果を示す。
【0062】
ここで、対向車本体確定範囲A2´及び対向車判定範囲A2は第1の対向車201の物標Tf1の位置を基準として規定する。対向車判定範囲A2の規定の方法は実施例1と同様である。対向車本体確定範囲A2´は対向基準物標Tf1の位置を基準として横方向に±dx2の範囲とする。一例として、対向車本体確定範囲A2´の横方向の幅は、2dx2=2.5[m]である。ここでdx2>dx1であり、横方向に関して、対向車本体確定範囲A2´は対向車判定範囲A2よりも広い範囲としている。同様に対向車本体確定範囲A2´の縦方向の範囲は、物標Tf1の位置を基準として縦方向にdy2の範囲とする。ここで、ここでdy2>dyf0であり、縦方向に関して、対向車本体確定範囲A2´は対向車判定範囲A2よりも広い範囲としている。図16に示すように、第2の対向車202に基づいて検出される物標Tf2の位置は、対向車判定範囲A2の外部にあって、対向車本体確定範囲A2´の内部にあるとする。また、第2の対向車202が202´の位置に移動した場合に検出される物標Tf2´の位置は、対向車本体確定範囲A2´の外部にあるとする。
【0063】
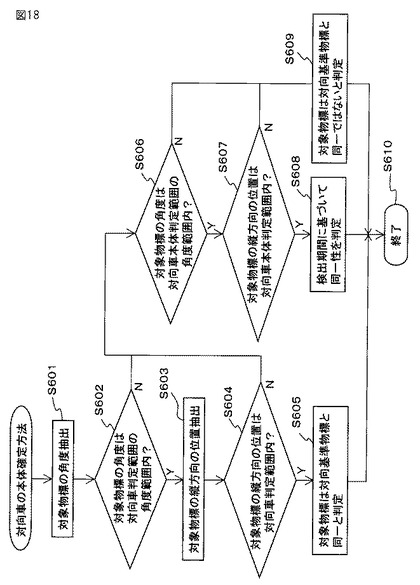
次に、本発明の実施例3に係る物標の検出方法について図18のフローチャートを用いて説明する。本発明の実施例3に係る物標の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。本実施例では、自車両に向かって移動する物標(対向車)を対象としている。検出された物標が自車両に向かって移動しているか否かの判断方法及び対象物標との同一性を判定するために基準とする物標の決定方法は、実施例1と同様であるので、詳細な説明は省略する。また、対向車本体確定範囲A2´及び対向車判定範囲A2の設定方法は、図10に示した実施例1の検出方法のステップS301〜S304と同様であるので詳細な説明は省略する。
【0064】
まず、図16に示した第2の対向車202の検出方法について説明する。位置比較部38が、ステップS601において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象となる物標の角度を抽出し、ステップS602において第2の対向車202から検出された対象物標Tf2の角度が対向車判定範囲A2の角度範囲内か否かを判定する。ここで、図17に示すように対向車判定範囲A2の角度範囲を第1の対向車201から検出された基準物標Tf1の角度θfを基準として(θf−dθf1/2)〜(θf+dθf1/2)の範囲とする。対象物標Tf2の角度がθf2と算出されたとすると、図17に示すようにθf2<θf−dθf1/2 であり、対象物標Tf2の角度は対向車判定範囲A2の角度範囲外にあると判定される。
【0065】
次に、ステップS606において、位置比較部38が、対象物標Tf2の角度は対向車本体確定範囲A2´内にあるか否かを判定する。ここで、対向車本体確定範囲A2´の角度範囲を(θf−dθf2/2)〜(θf+dθf2/2)の範囲とする。図17に示すように対象物標Tf2の角度がθf2と算出されたとすると、θf−dθf2/2 ≦ θf2 ≦ θf+dθf2/2であり、対象物標Tf2の角度θf2は対向車本体確定範囲A2´内に存在していると判定される。
【0066】
次に、ステップS607において、位置比較部38が、対象物標Tf2の縦方向の位置は対向車本体判定範囲内A2´内にあるか否かを判定する。ここで、対向車本体確定範囲A2´の縦方向の範囲を0〜dy2の範囲とする。図17に示すように対象物標Tf2の縦方向の位置がdyf2と算出されたとすると、0 ≦ dyf2 ≦ dy2であり、対象物標Tf2の縦方向の位置dyf2は対向車本体確定範囲A2´内に存在していると判定される。
【0067】
この場合、ステップS608において、検出期間に基づいて基準とする物標との同一性を判断する。即ち、即時に対向基準物標との同一性を判定せずに、実施例2と同様に所定の期間を設けて対向基準物標との同一性を判定する。
【0068】
次に、第2の対向車202が図16のように202´の位置に移動した場合の検出方法について説明する。この場合、検出された物標をTf2´とする。図18に示したフローチャートにおいて、ステップS601からS605まで、上述の第2の対向車202の場合と同様にして、対象物標Tf2´が対向車判定範囲A2内に存在するか否かを判定する。本実施例では、図16及び17に示すように、対象物標Tf2´は対向車判定範囲A2内に存在していないことから、次に、対象物標Tf2´の位置が対向車本体確定範囲A2´内にあるか否かを判定する。
【0069】
ステップS606において、位置比較部38が、対象物標Tf2´の角度は対向車本体確定範囲A2´の角度範囲内にあるか否かを判定する。ここで、対象物標Tf2´は対向車本体確定範囲A2´外に存在するので、ステップS609において、位置比較部38は、対象物標Tf2´は即時に対向基準物標Tf1とは同一ではないと判定する。
【0070】
このように実施例3に係るレーダ装置においては、対向車本体確定範囲を規定しているため、自車両に接近する対向車を早期に検出することができ、対向車との衝突を回避する可能性を高めることができる。
【0071】
上記の説明においては、他の車両に起因する物標が対向車本体確定範囲外で検出された場合に即時に他の対向車であると判定しているが、物標が対向車本体確定範囲外で検出された時間が所定の時間を経過した後に他の対向車であると判定するようにしてもよい。この場合は、対向車検出部内にカウンタを設置し、物標が対向車本体確定範囲外で検出されるたびにカウントするカウンタのカウント数が所定の値以上となった場合に他の車両であると判定するようにしてもよい。
【0072】
以上の説明においては、レーダ装置としてメカスキャン方式を採用した例を示したが、電子スキャン方式を採用しても本発明を実施することができる。
【符号の説明】
【0073】
10 レーダ装置
11 三角波発生回路
12 電圧制御発信器(VCO)
13 方向性結合器
14 送信アンテナ
15 受信アンテナ
17 ミキサ
18 A/D変換器
20 モータ駆動回路
21 モータ
22 エンコーダ
23 車両制御用ECU
29 車速センサ
30 マイコン
31 ピーク検出手段
32 ペアリング手段
33 位置・角度算出部
34 検出部
35 距離閾値演算部
36 対向車判定部
37 距離閾値演算手段
38 位置比較部
39 側面判定部
40 カウンタ
100 自車両
101 第1の先行車
102 第2の先行車
201 第1の対向車
202 第2の対向車
【技術分野】
【0001】
本発明は、レーダ装置に関し、特に車両に搭載され、車両の先行車及び対向車の位置を検出するレーダ装置に関する。
【背景技術】
【0002】
レーダ装置を用いた物標の検出装置として、物標を正確に検出する物体検出装置が報告されている(特許文献1)。図1に示すように、従来の物体検出装置110の物体検出部140は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段141と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段142と、物体検出部140から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段143と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段144とを有する。
【0003】
このような構成とすることにより、レーダを用いた物体検出において物体を正確に検出することができるというものである。
【0004】
また、レーダを応用した技術として先行車両に追随して走行するACC(Adaptive Cruise Control System)や、先行車との距離が近づくと自動的にブレーキをかけて衝突を防止するCMBS(Collision Mitigation Brake System)制御が知られている。このACCやCMBSにおいては、先行して走行する車両(先行車)の位置を正確に把握する必要がある。一般的に車両はサイドミラーを備えており、レーダ装置から先行車に向けて送信された電波は、先行車の後部から反射されるだけでなく、サイドミラーからも反射される。そのため、サイドミラーからの反射波に基づいて検出された物標を、当該ミラーを備えた先行車とは異なる他の物標と認識してしまい、1台の先行車が複数の物標を生じさせ、物標のデータを格納するための容量が不足する場合がある。この問題を解決するために所謂「ミラー判定処理」が行われている。
【0005】
「ミラー判定処理」とは、サイドミラーからの反射波に基づいて検出された物標を、当該ミラーを備えた先行車に基づくものとして扱う処理をいう。ミラー判定処理では、検出された先行車の物標の位置を基準とした所定の範囲を設定し、その範囲内で検出された物標は当該先行車に基づくと仮定し、1つの物標のみを代表させてデータ処理を行う。
【0006】
ミラー判定処理について図2を用いて具体的に説明する。図2は車両が走行する車線を上方から俯瞰した様子を示している。車線300には矢印aの方向に向かってレーダ装置10を搭載した自車両100が走行している。また、車線300には矢印aと同じ方向である矢印bの方向に向かって、自車両100に先行して第1の先行車101が走行しているとする。第1の先行車101に向けてレーダ装置10が発射した電波は第1の先行車101の後部で反射するため、検出される物標T0の位置は第1の先行車101の後部となる。
【0007】
一方、第1の先行車101の車体の両側にミラー(サイドミラー)が設けられているとする。ミラーは電波を強く反射するため、レーダ装置10から発射された電波はミラーで反射され物標T1、T2が検出される。検出された物標T1、T2のデータを第1の先行車101の物標T0のデータと共に記憶するとすれば、先行車1台につき3個の物標のデータを記憶する必要が生じる。ここで、レーダ装置で記憶することができる物標の数は10個程度であるので、1台の車両につき3個の物標を記憶しておくことは好ましくない。そこで、ミラー判定処理においては、ミラーからの反射によって検出された物標T1、T2は第1の先行車101に基づくものであるとして、第1の先行車101の物標T0のデータを代表させてデータ処理を行う。
【0008】
このようなミラー判定処理では、図2に示すように、第1の先行車101の物標T0の位置を基準として、所定の範囲、例えば、物標T0の位置を基準として、自車両100から見て横方向に±dx0、縦方向にdy0の範囲A1内において検出された物標を物標T0と同一とみなす処理を行う。ここで、一例として横方向の幅2dx0は2.5[m]である。この先行車と同一とみなす所定の範囲を「先行車判定範囲」と呼ぶことにする。先行車判定範囲を車両のミラーを含む範囲に設定することにより、先行車のミラーからの反射に基づく物標を先行車と同一とみなすことができ、レーダ装置が処理すべきデータの数を実際の先行車の数に適合させることができる。
【0009】
従来のミラー判定処理は、レーダ装置が搭載された自車両と同じ進行方向に向かって走行する先行車を対象とするものであった。一方、自車両と他の車両との衝突を回避するためには、自車両に向かって移動する「対向車」の位置を正確に検出することが重要である。特に、対向車は自車両に向かって急速に接近してくるため、その位置を短時間に正確に検出することが望ましい。しかしながら、対向車に対して従来のミラー判定処理を適用すると、以下のように対向車の位置を正確に検出することができないという問題が生じた。
【0010】
図2に示すように、対向車線400上を第1の対向車201及び第2の対向車202がそれぞれ自車両100の進行方向とは反対の方向である矢印c1、c2の方向に走行し、検出された物標の位置をそれぞれTf1、Tf2とする。ここで、対向車に対しても先行車と同じ大きさの範囲である先行車判定範囲を設定してミラー判定処理を行うと、物標Tf1の位置を基準として、横方向に±dx0、縦方向にdy0の範囲A1´において検出された物標は基準とした物標Tf1と同一とみなすこととなる。Tf1、Tf2の横方向の間隔(横位置差)dxがdx0より小さく、縦方向の間隔(縦位置差)dyがdy0より小さい場合には、Tf2の位置は範囲A1´に含まれることとなり、ミラー判定処理により、第2の対向車202は第1の対向車201と同一と判定され、第2の対向車202の位置を把握することができなくなる。その結果、第2の対向車202が自車両100側に接近した場合に、衝突の回避行動の開始が遅れる原因となっていた。
【先行技術文献】
【特許文献】
【0011】
【特許文献1】特開2010−32429号公報
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記のように、従来のミラー判定処理を対向車の検出にそのまま適用してしまうと、対向車の位置を正確に検出することができないという問題が生じていた。
【課題を解決するための手段】
【0013】
本発明のレーダ装置は、物標に対して電波を送信する送信アンテナと、物標からの反射波を受信する受信アンテナと、反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、先行物標の位置が、先行車の位置を基準とした所定の先行車判定範囲内にある場合は、先行物標は先行車と同一と判定し、自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、対向物標の位置が、対向車の位置を基準とした所定の対向車判定範囲内にある場合には、対向物標は対向車と同一と判定する検出部と、を備え、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定される、ことを特徴とする。
【発明の効果】
【0014】
本発明のレーダ装置は、並走して走行する対向車をそれぞれ個別の車両として早期に検出することができるという利点がある。
【図面の簡単な説明】
【0015】
【図1】従来の物体検出装置の構成図である。
【図2】先行車及び対向車をレーダ装置により検出する場面を説明するための図面である。
【図3】本発明の実施例1に係るレーダ装置の構成図である
【図4】本発明の実施例1に係るレーダ装置の検出部の構成図である。
【図5】本発明の実施例1に係るレーダ装置において、先行車及び対向車を検出する方法を説明するための車両の俯瞰図である。
【図6】本発明の実施例1に係るレーダ装置において、先行車及び対向車を検出する方法を説明するためのレーダ装置の検出結果を表す図である。
【図7】本発明の実施例1に係るレーダ装置において、対象物標が先行車であるか対向車であるかを判定する手順を示すフローチャートである。
【図8】反射波の信号強度の角度依存性を示す図である。
【図9】本発明の実施例1に係るレーダ装置において、先行車を検出する方法を説明するためのフローチャートである。
【図10】本発明の実施例1に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【図11】本発明の実施例2に係るレーダ装置の検出部の構成を示す図である。
【図12】並走する対向車をレーダ装置により検出する場面を説明するための図面である。
【図13】本発明の実施例2に係るレーダ装置において、先行車を検出する方法を説明するためのフローチャートである。
【図14】本発明の実施例2に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【図15】本発明の実施例2に係るレーダ装置において、カウンタのカウント数の時間依存性を示す図である。
【図16】並走する対向車をレーダ装置により検出する場面を説明するための図面である。
【図17】並走する対向車をレーダ装置で検出した結果を表す図である。
【図18】本発明の実施例3に係るレーダ装置において、対向車を検出する方法を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、図面を参照して、本発明に係るレーダ装置について説明する。ただし、本発明の技術的範囲はそれらの実施の形態には限定されず、特許請求の範囲に記載された発明とその均等物に及ぶ点に留意されたい。
【実施例1】
【0017】
まず、本発明の実施例1に係るレーダ装置について、図面を用いて説明する。図3は、本発明の実施例1に係るレーダ装置の構成図である。本発明のレーダ装置は、マイコン30の内部に検出部34を備えている点を特徴としている。本実施例では、アンテナの駆動方法としてメカスキャン方式を採用した場合について説明する。電圧制御発振器(VCO)12に三角波生成回路11からFM信号を供給して、送信波を送信アンテナ14から車両前方へ送信する。車両の前方の物標に当たって反射した反射波を受信アンテナ15で受信し、これと送信波とを方向性結合器13を介してミキサ17で混合することによりビート信号を得る。ビート信号はA/D変換器18でA/D変換され、マイコン30に入力される。ここで、ビート信号から、ピーク検出手段31において検出されたピークデータを用いて、ペアリング手段32において物標の検出が行なわれ、位置・角度算出部33において、自車両と物標との相対距離、相対速度及び角度が算出される。
【0018】
所定の角度範囲の物標を検出できるように、送信アンテナ14及び受信アンテナ15を左右に振り、送信アンテナ14及び受信アンテナ15が同じ方向を向くように、モータ駆動回路20により制御されたモータ21で駆動する。モータ21の駆動状況は、エンコーダ22を介してモータ21からの信号をマイコン30に入力することによりフィードバックされ、アンテナの角度範囲やその周期の制御が行なわれる。
【0019】
ここで、物標の角度は、図8に示すように、送信アンテナを水平方向に振って角度をθ1,θ2,…,θ5と変えながら受信信号の強度を測定し、信号強度がピークを示す角度(図8の例ではθ3)を物標が存在する角度として検出することができる。
【0020】
次に、本発明の実施例1に係るレーダ装置の検出部について図面を用いて説明する。図4に示すように、本発明の実施例1に係るレーダ装置の検出部34は、距離閾値演算部35と、位置比較部38と、側面判定部39とを備えており、距離閾値演算部35は、対向車判定部36と、距離閾値演算手段37とを備えている。
【0021】
対向車判定部36は、検出した位置及び相対速度から、物標が先行車か対向車かを判定する。距離閾値演算手段37は、検出した物標が先行車か対向車かに応じて、先行車判定範囲または対向車判定範囲を決定するための距離に関する閾値を算出する。位置比較部38は、検出した物標の距離及び角度から、物標が先行車判定範囲内または対向車判定範囲内に存在するか否かを判定する。側面判定部39は、検出した物標が先行車判定範囲内または対向車判定範囲内に存在するか否かに基づいて、対象物標と、検出した先行車または対向車の物標との同一性を判定する。本発明においては、対向車判定範囲は、先行車判定範囲よりも狭くなるように設定する点を特徴としている。
【0022】
次に、本発明の実施例1に係るレーダ装置において、先行車を検出する方法について図5を用いて説明する。図5は先行車を検出する場面を説明するための図であり、車道を走行する車両を上方から俯瞰した様子を示している。レーダ装置10を搭載した自車両100は車線300上を速度60[km/h]で矢印aの方向に向かって走行しており、第1の先行車101及び第2の先行車102が車線300上を速度40[km/h]で矢印bの方向に向かって走行しているとする。図5には、対向車線400上を走行する第1の対向車201、第2の対向車202も併せて記載している。
【0023】
レーダ装置10が、第1の先行車101及び第2の先行車102に対して電波を送信し、反射波から物標Ta1、Ta11、Ta12、Ta2を検出したとすると、検出結果はレーダ装置において図6のように認識される。なお、実際には第2の先行車102のミラーからも物標が検出されるが、ここでは説明を簡単にするために省略する。図6はレーダ装置が検出した物標の位置を示した図であり、表示領域500内において自車両を基準とした角度0の方向を基準線200で表し、物標の位置及び角度に応じて物標のマーク(上向きの三角形または下向きの三角形)がプロットされている。
【0024】
実施例1のレーダ装置における物標の検出方法について説明する。まず、レーダ装置が検出した物標が先行車であるか対向車であるかを判定する。この判定処理は、対向車判定部36が、マイコン30内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。図7は、物標が先行車であるか対向車であるかを判定する処理手順のフローチャートである。まず、ステップS101において、レーダ装置10が物標を検出したか否かを判定する。物標が検出されたか否かは、図8のように、ある角度で信号強度がピークを有する反射波の有無によって判定することができる。物標が検出されなかった場合は、ステップS101のまま物標の検出を再度試みる。物標が検出された場合は、ステップS102において、物標の相対速度、距離、角度を検出してメモリ(図示せず)に記憶する。物標の相対速度、距離はFM−CW波のピーク検出手段31及びペアリング手段32によって検出できる(図3参照)。一方、物標の角度は反射波のピークの角度から求めることができる。図8の例では、複数の角度θ1〜θ5でピークが検出され、その中でピークが最大となる角度はθ3であるので、物標が存在する角度はθ3と求めることができる。物標の位置は、検出した距離及び角度から求めることができる。
【0025】
次に、ステップS103において、物標の速度を算出する。具体的には物標の相対速度と自車両の速度から速度を算出する。次に、ステップS104において、物標の速度及び自車両の速度から、検出した物標が先行車であるか否かを判定する。例えば、図5に示すように物標Ta1が自車両100に向かって相対速度20[km/h]で接近している場合、自車両100は速度60[km/h]で走行しているので、物標Ta1は自車両100と同じ方向に速度40[km/h]で走行していると判定でき、物標Ta1は先行車に基づくものと判定できる。検出した物標が自車両に先行して移動する物標(先行物標)である場合は、ステップS105において、先行車判定処理を行う。一方、検出した物標が自車両とは反対方向に移動する物標(対向物標)である場合は、ステップS106において、対向車判定処理を行う。
【0026】
次に、先行車判定処理について図9のフローチャートを用いて説明する。先行車判定処理は検出部34内のメモリ(図示せず)に格納されたプログラムを実行することより行われる。ここでは、自車両と同じ方向に移動する物標が複数検出されたと仮定する。まず、ステップS201において、距離閾値演算手段37が、先行車と判定された物標のそれぞれについて、自車両に最も近い位置に存在する物標であるか否かを判定する。対象としている物標が自車両に最も近い位置に存在する物標である場合には、ステップS202において、距離閾値演算手段37が、対象としている物標を先行基準物標と決定する。先行基準物標は、先行基準物標以外に検出された物標(対象物標)と先行基準物標との同一性を判定するための範囲を決めるために基準とする物標である。自車両に最も近い位置に存在する物標を先行基準物標としているのは、自車両に最も近い先行車が自車両と衝突する危険性が最も高いためである。
【0027】
次に、ステップS203において、距離閾値演算手段37が、先行車判定範囲の角度範囲を算出する。先行車判定範囲は、対象物標と先行基準物標との同一性を判定するための範囲である。具体的には、まず、図6に示すように先行基準物標の角度θaに基づいて所定の横方向の範囲dθa1を決定する。先行車判定範囲A1を図5に示すように先行基準物標Ta1を基準として、横方向に+dx0、−dx0の範囲とした場合、横方向の範囲2dx0に相当する角度dθa1を以下のようにして算出する。
dθa1=2sin-1(dx0)/xa1 (1)
ここで、xa1は、自車両100から先行基準物標Ta1までの距離である。また、一例として、先行車判定範囲A1の横方向の幅2dx0は1.8[m]である。
【0028】
次に、ステップS204において、距離閾値演算手段37が、先行車判定範囲A1の縦方向の範囲を決定する。縦方向の範囲は先行基準物標Ta1の位置から進行方向へ所定の距離dy0の範囲とする。先行車判定範囲A1は図6においてハッチングされた範囲で表される。なお、縦方向の範囲dy0は、先行基準物標Ta1の速度に合わせて設定してもよい。即ち、先行基準物標Ta1の速度が大きい場合は縦方向の範囲dy0を大きく設定し、先行基準物標Ta1の速度が小さい場合は縦方向の範囲dy0を小さく設定する。このようにすることで、先行基準物標の速度に応じて適切に先行車判定範囲を設定することができる。
【0029】
ステップS201において、対象物標がレーダ装置に最も近い物標ではないと判定された場合は、対象物標が先行基準物標を基準とした所定の先行車判定範囲内に存在するか否かを調べることにより、対象物標と先行基準物標との同一性を判定する。まず、位置比較部38が、ステップS205において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象物標の角度を抽出し、ステップS206において、対象物標の角度が先行車判定範囲A1内か否かを判定する。例えば、図6に示すように、対象物標Ta2の角度θa2は、θa2>θa+dθa1/2となっていることがわかる。その結果、対象物標Ta2は先行車判定範囲A1内には存在しないと判定され、ステップS210において、側面判定部39が、対象物標Ta2は先行基準物標と同一ではないと判定する。
【0030】
一方、対象物標がTa11である場合、その角度θa11が以下の式を満たす範囲である場合には、対象物標の角度は先行車判定範囲A1内にあると判定される。
θa−dθa1/2 ≦ θa11 ≦ θa+dθa1/2 (2)
【0031】
この場合、位置比較部38が、ステップS207において、対象物標Ta11の縦方向の位置dya11を予めデータを保存した(図7のS102)メモリ(図示せず)から抽出し、ステップS208において、対象物標Ta11の縦方向の位置が先行車判定範囲A1内にあるか否かを判定する。対象物標Ta11の縦方向の位置dya11が、以下の式を満たす場合、対象物標Ta11の縦方向の位置は先行車判定範囲A1内にあると判定される。
0 ≦ dya11 ≦ dy0 (3)
【0032】
対象物標Ta11の縦方向の位置が先行車判定範囲A1内である場合は、側面判定部39が、ステップS209において、対象物標Ta11は、先行基準物標と同一と判定する。
【0033】
図5及び図6に示した例では、物標Ta2、Ta11のうち、物標Ta2は先行車判定範囲A1の外部に存在することから、先行車である物標Ta1とは別の物標であると判定され、物標Ta11は先行車判定範囲A1の内部に存在することから、先行車である物標Ta1と同一の物標であると判定される。図5及び図6に示すように、物標Ta12も先行車判定範囲A1の内部に存在することから、先行車である物標Ta1と同一の物標であると判定される。その結果、物標Ta11及びTa12はデータ処理の対象とはせず、物標Ta1を代表してデータ処理を行うことができる。
【0034】
次に、自車両に向かって移動する物標の検出方法について説明する。図7に示したフローチャートのステップS104において、検出した物標が自車両に向かって移動している場合には、対向車判定部36が、その物標は対向車であると判断し、ステップS106において対向車判定処理が実行される。対向車判定処理について図10のフローチャートを用いて説明する。対向車判定処理は検出部34内のメモリ(図示せず)に格納されたプログラムを実行することより行われる。まず、ステップS301において、距離閾値演算手段37が、対向車と判定された物標が自車両に最も近い位置に存在する物標であるか否かを判定する。検出された物標が自車両に最も近い位置に存在する物標である場合には、ステップS302において、距離閾値演算手段37が、検出された物標を対向基準物標と決定する。自車両に最も近い位置に存在する物標を基準としているのは、自車両に最も近い対向車が、自車両と衝突する危険性が最も高いためである。
【0035】
次に、ステップS303において、距離閾値演算手段37が、対向車判定範囲の角度範囲を決定する。対向車判定範囲は、対象物標と対向基準物標との同一性を判定するための範囲である。具体的には、まず、図6に示すように対向基準物標Tf1の角度θfに基づいて所定の横方向の範囲dθf1を決定する。対向車判定範囲A2を図5に示すように対向基準物標Tf1を基準として、横方向に±dx1の範囲とした場合、横方向の範囲2dx1に相当する角度dθf1を以下のようにして算出する。
dθf1=2sin-1(dx1)/xf1 (4)
ここで、xf1は、自車両100から対向基準物標Tf1までの距離である。
【0036】
次に、ステップS304において、距離閾値演算手段37が、対向車判定範囲A2の縦方向の範囲を決定する。縦方向の範囲は対向基準物標Tf1の位置から自車両の進行方向に所定の距離dyf0の範囲とする。対向車判定範囲A2は図6においてハッチングされた範囲で表される。縦方向の範囲dyf0は、対向基準物標Tf1の速度に合わせて設定してもよい。即ち、対向基準物標Tf1の速度が大きい場合は縦方向の範囲dyf0を大きく設定し、対向基準物標Tf1の速度が小さい場合は縦方向の範囲dyf0を小さく設定する。このようにすることで、対向基準物標の速度に応じて適切に対向車判定範囲を設定することができる。
【0037】
ここで、本発明においては、対向車判定範囲A2を先行車判定範囲A1よりも狭くなるように設定している点を特徴としている。具体的には図5に示すように、先行車判定範囲A1を規定する横方向の距離をdx0とし、対向車判定範囲A2を規定する横方向の距離をdx1とすると、dx1<dx0となるように先行車判定範囲A1及び対向車判定範囲A2を設定する点を特徴としている。
【0038】
ステップS301において、対象物標がレーダ装置に最も近い物標ではないと判定された場合は、対象物標が対向基準物標を基準とした所定の対向車判定範囲内に存在するか否かを調べることにより、対象物標と対向基準物標との同一性を判定する。まず、位置比較部38が、ステップS305において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象物標の角度を抽出し、ステップS306において、対象物標の角度が対向車判定範囲内か否かを判定する。例えば、図6に示すように、対象物標Tf2の角度θf2は、θf2<θf−dθf1/2となっていることがわかる。その結果、対象物標Tf2は対向車判定範囲A2内には存在しないと判定され、ステップS310において、側面判定部39が、対象物標Tf2は対向基準物標Tf1と同一ではないと判定する。
【0039】
なお、対象物標が第3の対向車203であってその物標がTf3であるとき、その角度θf3が以下の式を満たす範囲である場合には、対象物標の角度は対向車判定範囲A2内にあると判定される。
θf−dθf1/2 ≦ θf3 ≦ θf+dθf1/2 (5)
この場合、位置比較部38が、ステップS307において、対象物標Tf3の縦方向の位置dyf3を予めデータを保存した(図7のS102)メモリ(図示せず)から抽出し、ステップS308において、対象物標Tf3の縦方向の位置dyf3が対向車判定範囲A2内にあるか否かを判定する。対象物標Tf3の縦方向の位置dyf3が、以下の式を満たす場合、対象物標Tf3の縦方向の位置は対向車判定範囲A2内にあると判定される。
0 ≦ dyf3 ≦ dyf0 (6)
対象物標Tf3の縦方向の位置dyf3が対向車判定範囲A2内である場合は、ステップS309において、側面判定部39が、対象物標Tf3は対向基準物標Tf1と同一と判定する。
【0040】
図5及び図6に示した例では、物標Tf2、Tf3のうち、物標Tf2は対向車判定範囲A2の外部に存在することから、対向車である物標Tf1とは別の物標であることが判定され、物標Tf3は対向車判定範囲A2の内部に存在することから、対向車である物標Tf1と同一の物標であると判定される。
【0041】
図5及び図6には、本発明により設定した対向車判定範囲A2と従来の先行車判定範囲をそのまま対向車側に設定した場合の範囲A1´とを示している。物標Tf2は、従来の先行車判定範囲をそのまま対向車側に設定した場合の範囲A1´に含まれるため、従来の処理方法では対向基準物標Tf1と同一と判定されて検出することができなかった。一方、物標Tf2は、本発明により設定した対向車判定範囲A2の外部に存在するため、対向基準物標Tf1とは異なる物標として検出することができる。
【0042】
以上のように、本発明の実施例1に係るレーダ装置によれば、対向車の同一性を判定するための対向車判定範囲を先行車の同一性を判定するための先行車判定範囲よりも狭くしているために、対向車線に検出済みの対向車以外の他の対向車に基づく物標(対向物標)を検出した場合に、他の対向車を検出済みの対向車と同一車両であると誤って認識することを防止することができる。
【実施例2】
【0043】
次に、本発明の実施例2に係るレーダ装置の検出部について説明する。図11は、本発明の実施例2に係るレーダ装置の検出部の構成図である。検出部34は、距離閾値演算部35と、位置比較部38と、側面判定部39とを備えており、距離閾値演算部35は、対向車判定部36と、距離閾値演算手段37とを備えている。さらに、実施例2のレーダ装置の検出部は、位置比較部38がカウンタ40を備えている点を特徴としている。他の構成は実施例1と同様であるので詳細な説明は省略する。
【0044】
次に、本発明の実施例2に係るレーダ装置を用いた物標の検出方法について説明する。本発明の実施例2に係るレーダ装置は、検出部が、自車両と同一方向に移動する物標を先行車判定範囲外で検出した回数が所定の先行車判定回数を超えた場合に、当該物標は先行基準物標と同一ではないと判定し、自車両と反対方向に移動する物標を対向車判定範囲外で検出した回数が所定の対向車判定回数を超えた場合に、当該物標は対向基準物標と同一ではないと判定し、対向車判定回数は、先行車判定回数よりも小さくなるように設定する点を特徴としている。
【0045】
まず、先行車の検出方法について説明するために自車両と先行車両との位置関係について説明する。図12に走行する車両を上方から俯瞰した様子を示す。図12に示すように、レーダ装置10を搭載した自車両100の前方を第1の先行車101及び第2の先行車102が走行しているとする。また、自車両100に最も近い位置に存在する第1の先行車101について検出された物標Ta1の位置を基準として、先行車判定範囲A1が規定されているとする。
【0046】
次に、先行車の検出方法について、図13のフローチャートを用いて説明する。この先行車の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。まず、ステップS401において、側面判定部39が、検出した物標が先行車側面判定条件を充足しているか否かを判定する。ここで「先行車側面判定条件」とは、対象物標が先行車判定範囲A1内に存在することをいう。対象物標を第2の先行車102についての物標Ta2とすると、対象物標Ta2は先行車判定範囲A1内に存在していないため、ステップS405において、カウンタ40がカウント数nを1つ増加させる。なお、カウント数nの初期値は0である。
【0047】
次に、ステップS406において、側面判定部39が、カウント数nが10以上であるか否かを判定する。カウント数nが10以上である場合は、ステップS407において、側面判定部39が、対象物標Ta2は先行基準物標Ta1と同一ではないと判定し、側面判定フラグをOFFとする。ここで、側面判定フラグとは、対象物標が先行基準物標と同一である可能性が高いことを示すためのフラグである。ステップS407において、側面判定フラグをOFFとするのは、一旦、対象物標が先行基準物標と同一ではないと判定した以上、その判定を覆さないようにするためである。一方、ステップS406において、カウント数nが10未満である場合は、側面判定フラグをOFFとすることなく、次の検出を行う。
【0048】
ステップS401において、側面判定部39が、対象物標Ta2は側面判定条件を充足していると判定した場合には、ステップS402において、カウンタ40がカウント数nを1つ減算する。次に、ステップS403において、側面判定部39が、カウンタのカウント数nが4以下であるか否かを判定する。nが4以下である場合は、側面判定フラグをONとする。側面判定フラグをONとするのは、対象物標が先行基準物標と同一である可能性が高いことを表すためである。
【0049】
このように、先行車の判定においては、対象物標が先行車判定範囲外で10回検出された場合に、先行基準物標とは同一ではないと判定している。即ち、検出部は、物標を先行車判定範囲外で検出した回数が所定の先行車判定回数(10回)を超えた場合に、対象物標が他の先行車に基づくものであると判定している。
【0050】
次に、対向車の検出方法について説明するために自車両と対向車両との位置関係について説明する。図12に走行する車両を上方から俯瞰した様子を示す。図12に示すように、レーダ装置10を搭載した自車両100の前方を第1の対向車201及び第2の対向車202が対向車線400上を走行しているとする。また、自車両100に最も近い位置に存在する第1の対向車201の検出された物標Tf1の位置を基準として、対向車判定範囲A2が規定されているとする。
【0051】
次に、対向車の検出方法について、図14のフローチャートを用いて説明する。この対向車の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。まず、ステップS501において、側面判定部39が、対象物標が本体確定されているか否かを判定する。ここで「本体確定」とは、対象物標が過去において既に対向基準物標と同一であると確定されたことをいい、本体確定されているか否かに関する情報は、対象物標に関するデータとしてメモリ内に格納されている。対象物標が、既に本体確定されている場合にはステップS510において対象物標の対向基準物標との同一性の判定処理を終了する。
【0052】
側面判定部39が、対象物標が本体確定されていないと判定した場合には、ステップS502において、検出した物標が対向車側面判定条件を充足しているか否かを判定する。ここで「対向車側面判定条件」とは、対象物標が対向車判定範囲A2内に存在することをいう。対象物標を第2の対向車202の物標Tf2とすると、図12に示すように、物標Tf2は対向車判定範囲A2内に存在していないため、ステップS506において、カウンタ40がカウント数nを3つ増加させる。なお、カウンタ数nの初期値は0である。
【0053】
次に、ステップS507において、側面判定部39が、カウント数nが9以上であるか否かを判定する。カウント数nが9以上である場合は、ステップS508において、側面判定部39が、対象物標Tf2は対向基準物標Tf1と同一ではないと判定し、側面判定フラグをOFFとする。ここで、対象物標Tf2が対向車判定範囲A2内で1回検出されるたびにカウント数nを3つ増加させているので、検出回数が3回でカウント数nは9以上となる。ステップS508において、側面判定フラグをOFFとするのは、一旦、対象物標が対向基準物標と同一ではないと判定した以上、その判定を覆さないようにするためである。一方、ステップS507において、カウント数nが9未満である場合は、側面判定フラグをOFFとすることなく、次の検出を行う。
【0054】
カウンタ40のカウント数nの時間的変化の一例を図15に示す。図15に示すように側面判定フラグは、カウント数n≦2となった時刻t1でONとされるが、n≧9となった時刻t2で本体と確定されてOFFとされる。
【0055】
ステップS502において、側面判定部39が、対象物標は対向車側面判定条件を充足していると判定した場合には、ステップS503において、カウンタ40がカウント数nを3つ減算する。次に、ステップS504において、側面判定部39が、カウンタのカウント数nが2以下であるか否かを判定する。nが2以下である場合は、ステップS505において、側面判定フラグをONとする。側面判定フラグをONとするのは、対象物標が対向基準物標と同一である可能性が高いことを表すためである。
【0056】
このように、対向車の判定においては、対象物標が対向車判定範囲外で3回検出された場合に他の対向車であると判定している。即ち、検出部は、対象物標を対向車判定範囲外で検出した回数が所定の対向車判定回数(3回)を超えた場合に、対象物標が他の対向車に基づくものであると判定している。
【0057】
ここで、レーダ装置が一定の時間間隔で複数回、電波を送信するとした場合、対向車検出部が、対向物標が対向車判定範囲外で検出された期間が所定の対向車判定期間を超えたときに、対向物標を他の対向車と判定する対向車判定期間は、先行車検出部が、先行物標が先行車判定範囲外で検出された期間が所定の先行車判定期間を超えたときに、先行物標を他の先行車と判定する先行車判定期間よりも短いこととなる。従って、本発明の実施例2に係るレーダ装置においては、対向車判定回数を先行車判定回数より少なくすることにより、対向車を短時間で検出することができる。
【0058】
また、上記の説明において、先行車判定回数を10回とし、対向車判定回数を3回とした例を示したが、これには限られず、対向物標を対向車判定範囲の外部で最初に検出されてから対向車であると判定するまでの時間が、先行物標を先行車判定範囲の外部で最初に検出されてから先行車であると判定するまでの時間よりも短く設定することができればよい。対向車は先行車よりも相対速度が速いため、対向車に対する判定をより早期に行うことができる。これにより、ACCやCMBSの制御をより安全に行うことができる。
【0059】
以上の説明においては、物標が先行車判定範囲の外部または対向車判定範囲の外部で検出された場合にカウンタの数を増加させる例について説明したが、物標が先行車判定範囲の内部または対向車判定範囲の内部で検出された場合にカウンタの数を減少させる構成を付加するようにしてもよい。このようにすることで、ノイズ等による影響により一旦誤ってカウンタのカウント数を増加させてしまった場合でも、カウンタのカウント数を減少させることにより、誤った判定結果を修正することができる。
【実施例3】
【0060】
次に、本発明の実施例3に係るレーダ装置の検出部について説明する。実施例3に係るレーダ装置においては、検出部は、対向物標の位置が、対向車の位置を基準とした所定の対向車本体確定範囲外にある場合には、即時に対象物標は基準とした対向車とは異なると判定し、所定の対向車本体確定範囲は対向車判定範囲よりも広い点を特徴としている。本発明の実施例3に係るレーダ装置の検出部の構成は実施例1と同様であるので詳細な説明は省略する。
【0061】
本発明の実施例3に係るレーダ装置の検出部の動作方法について図16を用いて説明する。図16は、対向車線400上を走行する第1の対向車201及び第2の対向車202を上方から俯瞰した図である。同図において、第2の対向車202は第1の対向車201の後方を走行し、202→202´と移動する様子を示している。また、図17に、レーダ装置の検出結果を示す。
【0062】
ここで、対向車本体確定範囲A2´及び対向車判定範囲A2は第1の対向車201の物標Tf1の位置を基準として規定する。対向車判定範囲A2の規定の方法は実施例1と同様である。対向車本体確定範囲A2´は対向基準物標Tf1の位置を基準として横方向に±dx2の範囲とする。一例として、対向車本体確定範囲A2´の横方向の幅は、2dx2=2.5[m]である。ここでdx2>dx1であり、横方向に関して、対向車本体確定範囲A2´は対向車判定範囲A2よりも広い範囲としている。同様に対向車本体確定範囲A2´の縦方向の範囲は、物標Tf1の位置を基準として縦方向にdy2の範囲とする。ここで、ここでdy2>dyf0であり、縦方向に関して、対向車本体確定範囲A2´は対向車判定範囲A2よりも広い範囲としている。図16に示すように、第2の対向車202に基づいて検出される物標Tf2の位置は、対向車判定範囲A2の外部にあって、対向車本体確定範囲A2´の内部にあるとする。また、第2の対向車202が202´の位置に移動した場合に検出される物標Tf2´の位置は、対向車本体確定範囲A2´の外部にあるとする。
【0063】
次に、本発明の実施例3に係る物標の検出方法について図18のフローチャートを用いて説明する。本発明の実施例3に係る物標の検出方法は、検出部34内のメモリ(図示せず)に格納されたプログラムを実行することにより行われる。本実施例では、自車両に向かって移動する物標(対向車)を対象としている。検出された物標が自車両に向かって移動しているか否かの判断方法及び対象物標との同一性を判定するために基準とする物標の決定方法は、実施例1と同様であるので、詳細な説明は省略する。また、対向車本体確定範囲A2´及び対向車判定範囲A2の設定方法は、図10に示した実施例1の検出方法のステップS301〜S304と同様であるので詳細な説明は省略する。
【0064】
まず、図16に示した第2の対向車202の検出方法について説明する。位置比較部38が、ステップS601において、予めデータを保存した(図7のS102参照)メモリ(図示せず)から対象となる物標の角度を抽出し、ステップS602において第2の対向車202から検出された対象物標Tf2の角度が対向車判定範囲A2の角度範囲内か否かを判定する。ここで、図17に示すように対向車判定範囲A2の角度範囲を第1の対向車201から検出された基準物標Tf1の角度θfを基準として(θf−dθf1/2)〜(θf+dθf1/2)の範囲とする。対象物標Tf2の角度がθf2と算出されたとすると、図17に示すようにθf2<θf−dθf1/2 であり、対象物標Tf2の角度は対向車判定範囲A2の角度範囲外にあると判定される。
【0065】
次に、ステップS606において、位置比較部38が、対象物標Tf2の角度は対向車本体確定範囲A2´内にあるか否かを判定する。ここで、対向車本体確定範囲A2´の角度範囲を(θf−dθf2/2)〜(θf+dθf2/2)の範囲とする。図17に示すように対象物標Tf2の角度がθf2と算出されたとすると、θf−dθf2/2 ≦ θf2 ≦ θf+dθf2/2であり、対象物標Tf2の角度θf2は対向車本体確定範囲A2´内に存在していると判定される。
【0066】
次に、ステップS607において、位置比較部38が、対象物標Tf2の縦方向の位置は対向車本体判定範囲内A2´内にあるか否かを判定する。ここで、対向車本体確定範囲A2´の縦方向の範囲を0〜dy2の範囲とする。図17に示すように対象物標Tf2の縦方向の位置がdyf2と算出されたとすると、0 ≦ dyf2 ≦ dy2であり、対象物標Tf2の縦方向の位置dyf2は対向車本体確定範囲A2´内に存在していると判定される。
【0067】
この場合、ステップS608において、検出期間に基づいて基準とする物標との同一性を判断する。即ち、即時に対向基準物標との同一性を判定せずに、実施例2と同様に所定の期間を設けて対向基準物標との同一性を判定する。
【0068】
次に、第2の対向車202が図16のように202´の位置に移動した場合の検出方法について説明する。この場合、検出された物標をTf2´とする。図18に示したフローチャートにおいて、ステップS601からS605まで、上述の第2の対向車202の場合と同様にして、対象物標Tf2´が対向車判定範囲A2内に存在するか否かを判定する。本実施例では、図16及び17に示すように、対象物標Tf2´は対向車判定範囲A2内に存在していないことから、次に、対象物標Tf2´の位置が対向車本体確定範囲A2´内にあるか否かを判定する。
【0069】
ステップS606において、位置比較部38が、対象物標Tf2´の角度は対向車本体確定範囲A2´の角度範囲内にあるか否かを判定する。ここで、対象物標Tf2´は対向車本体確定範囲A2´外に存在するので、ステップS609において、位置比較部38は、対象物標Tf2´は即時に対向基準物標Tf1とは同一ではないと判定する。
【0070】
このように実施例3に係るレーダ装置においては、対向車本体確定範囲を規定しているため、自車両に接近する対向車を早期に検出することができ、対向車との衝突を回避する可能性を高めることができる。
【0071】
上記の説明においては、他の車両に起因する物標が対向車本体確定範囲外で検出された場合に即時に他の対向車であると判定しているが、物標が対向車本体確定範囲外で検出された時間が所定の時間を経過した後に他の対向車であると判定するようにしてもよい。この場合は、対向車検出部内にカウンタを設置し、物標が対向車本体確定範囲外で検出されるたびにカウントするカウンタのカウント数が所定の値以上となった場合に他の車両であると判定するようにしてもよい。
【0072】
以上の説明においては、レーダ装置としてメカスキャン方式を採用した例を示したが、電子スキャン方式を採用しても本発明を実施することができる。
【符号の説明】
【0073】
10 レーダ装置
11 三角波発生回路
12 電圧制御発信器(VCO)
13 方向性結合器
14 送信アンテナ
15 受信アンテナ
17 ミキサ
18 A/D変換器
20 モータ駆動回路
21 モータ
22 エンコーダ
23 車両制御用ECU
29 車速センサ
30 マイコン
31 ピーク検出手段
32 ペアリング手段
33 位置・角度算出部
34 検出部
35 距離閾値演算部
36 対向車判定部
37 距離閾値演算手段
38 位置比較部
39 側面判定部
40 カウンタ
100 自車両
101 第1の先行車
102 第2の先行車
201 第1の対向車
202 第2の対向車
【特許請求の範囲】
【請求項1】
物標に対して電波を送信する送信アンテナと、
前記物標からの反射波を受信する受信アンテナと、
前記反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、前記先行物標の位置が、前記先行車の位置を基準とした所定の先行車判定範囲内にある場合は、前記先行物標は前記先行車と同一と判定する先行車検出部と、
前記反射波に基づいて、前記自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、前記対向物標の位置が、前記対向車の位置を基準とした所定の対向車判定範囲内にある場合には、前記対向物標は前記対向車と同一と判定する対向車検出部と、を有し、
前記対向車判定範囲は、前記先行車判定範囲よりも狭くなるように設定される、ことを特徴とするレーダ装置。
【請求項2】
前記先行車検出部は、前記先行物標が前記先行車判定範囲外で検出された期間が所定の先行車判定期間を超えたときに、前記先行物標を他の先行車と判定し、
前記対向車検出部は、前記対向物標が前記対向車判定範囲外で検出された期間が所定の対向車判定期間を超えたときに、前記対向物標を他の対向車と判定し、
前記対向車判定期間は前記先行車判定期間よりも短くなるように設定される、請求項1に記載のレーダ装置。
【請求項3】
前記レーダ装置は前記送信アンテナから複数回電波を送信し、
前記先行車検出部は、前記先行物標を前記先行車判定範囲外で検出した回数をカウントする第1カウンタを備え、前記第1カウンタがカウントした回数が所定の先行車判定回数を超えた場合に、前記先行物標を他の先行車と判定し、
前記対向車検出部は、前記対向物標を前記対向車判定範囲外で検出した回数をカウントする第2カウンタを備え、前記第2カウンタがカウントした回数が所定の対向車判定回数を超えた場合に、前記対向物標を他の対向車と判定し、
前記対向車判定回数は、前記先行車判定回数よりも小さくなるように設定される、請求項1に記載のレーダ装置。
【請求項4】
前記対向車検出部は、前記対向物標の位置が、前記対向車の位置を基準とした所定の対向車本体確定範囲外にある場合には、即時に前記対向物標を他の対向車と判定し、
前記対向車本体確定範囲は前記対向車判定範囲よりも広い、請求項1乃至3のいずれか一項に記載のレーダ装置。
【請求項1】
物標に対して電波を送信する送信アンテナと、
前記物標からの反射波を受信する受信アンテナと、
前記反射波に基づいて、自車両と同じ進行方向に向かって移動する先行車及び先行物標の位置を検出し、前記先行物標の位置が、前記先行車の位置を基準とした所定の先行車判定範囲内にある場合は、前記先行物標は前記先行車と同一と判定する先行車検出部と、
前記反射波に基づいて、前記自車両の進行方向と反対の方向に向かって移動する対向車及び対向物標の位置を検出し、前記対向物標の位置が、前記対向車の位置を基準とした所定の対向車判定範囲内にある場合には、前記対向物標は前記対向車と同一と判定する対向車検出部と、を有し、
前記対向車判定範囲は、前記先行車判定範囲よりも狭くなるように設定される、ことを特徴とするレーダ装置。
【請求項2】
前記先行車検出部は、前記先行物標が前記先行車判定範囲外で検出された期間が所定の先行車判定期間を超えたときに、前記先行物標を他の先行車と判定し、
前記対向車検出部は、前記対向物標が前記対向車判定範囲外で検出された期間が所定の対向車判定期間を超えたときに、前記対向物標を他の対向車と判定し、
前記対向車判定期間は前記先行車判定期間よりも短くなるように設定される、請求項1に記載のレーダ装置。
【請求項3】
前記レーダ装置は前記送信アンテナから複数回電波を送信し、
前記先行車検出部は、前記先行物標を前記先行車判定範囲外で検出した回数をカウントする第1カウンタを備え、前記第1カウンタがカウントした回数が所定の先行車判定回数を超えた場合に、前記先行物標を他の先行車と判定し、
前記対向車検出部は、前記対向物標を前記対向車判定範囲外で検出した回数をカウントする第2カウンタを備え、前記第2カウンタがカウントした回数が所定の対向車判定回数を超えた場合に、前記対向物標を他の対向車と判定し、
前記対向車判定回数は、前記先行車判定回数よりも小さくなるように設定される、請求項1に記載のレーダ装置。
【請求項4】
前記対向車検出部は、前記対向物標の位置が、前記対向車の位置を基準とした所定の対向車本体確定範囲外にある場合には、即時に前記対向物標を他の対向車と判定し、
前記対向車本体確定範囲は前記対向車判定範囲よりも広い、請求項1乃至3のいずれか一項に記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−163442(P2012−163442A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−24126(P2011−24126)
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月7日(2011.2.7)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]