
レーダ装置
【課題】 従来のレーダ装置は、全方位に亘って同一PRIを使用しているため、見通し外となる範囲を含む方位に対しても同一PRIを使用し、時間的リソースを有効に使用できていない。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
【解決手段】 この発明のレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備えるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、目標の捜索及び追随を実施するレーダ装置に関するものである。
【背景技術】
【0002】
一般的に、レーダ装置は電波を短いパルス(送信パルス)に区切って送信し、目標からの反射波を受信することにより目標の探知と距離の測定を実施している。繰返し送信される送信パルスの繰返周期(PRI:Pulse Repetition Interval)は、捜索要求範囲等の見るべき距離に応じて決められる(例えば、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【非特許文献1】電子情報通信学会編・発行 吉田孝監修「改訂レーダ技術」(第1章 1.1序論)
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のレーダ装置は全方位に亘る捜索範囲の要求を満足させるため、同一のPRIを使用するよう設計されている。
実際の運用段階では展開場所によっては地形等により見通しの悪い見通し外となる範囲も生じるが、見通し外となる範囲を含む方位に対しても見通しのよい方位と同一のPRIでの送受信を実施しており、目標捜索および目標追随動作の効率が悪いという課題があった。例えば、同一のPRIを使用して目標捜索を行うため、目標追尾に割り当てられる時間は一律に固定されてしまうという課題があった。
【0005】
この発明は係る課題を解決するためになされたものであり、展開場所に応じて方位毎のPRIを自動で変更できるようにすることで目標捜索時間を短縮し、短縮された時間を目標追随に自動的に割り振ることで、目標捜索精度を維持しながら弾力的に目標捜索及び目標追尾を行うことが可能なレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い、前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備える。
【発明の効果】
【0007】
この発明のレーダ装置によれば、展開場所に応じて方位毎に最適なPRIに自動で変更でき、これにより短縮された時間を目標の追随動作に充てることができるため、目標捜索精度を維持しながら、より弾力的に目標捜索と目標追尾の両動作を行うことができる。
【図面の簡単な説明】
【0008】
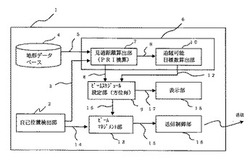
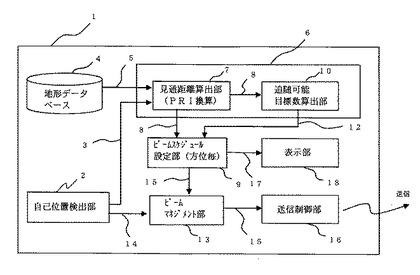
【図1】実施の形態1に係るレーダ装置の構成を説明する図である。
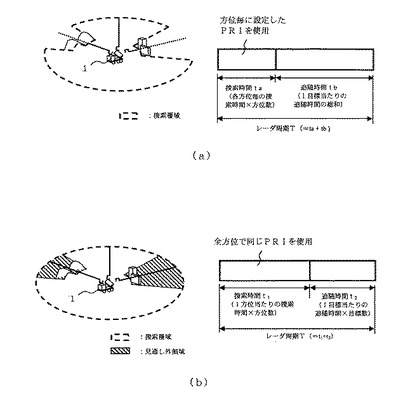
【図2】(a)実施の形態1に係るレーダ装置の運用を説明する運用概念図である。(b)従来のレーダ装置の運用を説明する運用概念図である。
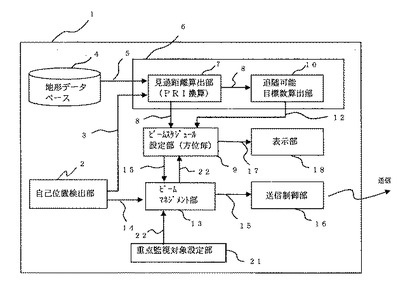
【図3】実施の形態2に係るレーダ装置の構成を説明する図である。
【図4】実施の形態2に係るレーダ装置の脅威度判定結果が付与された目標情報の一例である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、本発明に係るレーダ装置を図の具体例を用いて説明する。
図1は実施の形態1に係るレーダ装置1のブロック構成である。レーダ装置には各種設備が設けられているが、ここではこの発明の要旨とする部分を主に説明する。
【0010】
レーダ装置1は、レーダ装置1の位置を評定する自己位置検出部2、地形データ5を記憶してある地形データベース4、見通し距離や追随可能目標数等を演算する演算部6、方位毎の送信ビームのスケジュールを設定するビームスケジュール設定部9、設定された送信ビームスケジュールを表示する表示部18、ビームスケジュールの結果を受けてビーム制御の管理を行うビームマネジメント部13、ビームマネジメント部13の結果を受け所定の条件に従って空間に電波を放射する送信制御部16からなる。
【0011】
演算部6は、PRI換算の見通距離を算出する見通距離算出部7と、見通距離算出部7の結果を受けて追随可能な相手目標数を算出する追随可能目標数算出部10からなる。
地形データベース4には、例えば、山岳地帯、丘、川、平野などの地形情報の他、高速道路、ビル、鉄道等の建造物を含む3次元位置情報(地形データ5)が格納されている。地形データベース4の地形データ5を使用することで、自己位置を中心とした全周の3次元空間を仮想的に再現することが可能である。
レーダ装置1は車両等に搭載されており、移動場所で目標を捜索し又は目標を追随して目標情報を取得する。
【0012】
地形データベース4に格納される3次元位置情報には、例えば測量航空機からのレーザ測量データを用いることができる。あるいは、GPS受信機、ジャイロ、オドメータ、撮像カメラ及びLRF(Lazer Range Finder)を搭載した計測車両により取得されたレーザ測量データ(レーザ3次元点群データ)を用いることができる(計測車両については、例えば、特願2007−220405号を参照)。
このように、測量航空機や計測車両により予め取得された3次元位置情報(地形データ5)が地形データベース4に格納されている。
【0013】
図2はレーダ装置の運用を説明する図であり、(a)は本実施の形態に係るレーダ装置の運用図、(b)は従来のレーダ装置の運用を説明する図である。
【0014】
図1、図2を用いて本実施の形態に係るレーダ装置の動作について説明する。
自己位置検出部2は、GPS衛星等の測位衛星が送信する測位情報を受信して自己位置を測定する。自己位置検出部2は測定したレーダ位置情報3として見通距離算出部7に出力する。また、自己位置検出部2は、レーダ装置1のアンテナ面が指向しているレーダ方位情報14を取得して、そのレーダ方位情報14をビームマネジメント部13に出力する。
【0015】
見通し距離算出部7は、自己位置検出部2からのレーダ位置情報3に基づきレーダの現在位置を中心とした周囲の地形データ5を地形データベース4から抽出し、レーダ装置1が捜索可能な捜索覆域を算出する。
地形データベース4には、先に述べたように位置情報が各々に付与された3次元点群データが予め格納されており、3次元点群と自己位置との距離L(見通し距離L)を求めることで捜索覆域が算出される。
捜索覆域は方位θ毎の見通し距離Lで表わされ、方位θ1の方位に電波障害物があれば見通し距離Lは短く、障害物がない場合は所定の値(最大値)をとる。全周の方位については演算負荷に応じて所定の角度間隔Δθ(例えばΔθ=3度)で捜索覆域を算出する。
【0016】
見通し距離算出部7は方位毎に得られた見通し距離Lを用いて、見通し距離Lを目標までの最大距離としてPRIに換算する。見通し距離算出部7は、換算して得られた方位毎のPRI8を、ビームスケジュール設定部9と追随可能目標数算出部10に向けて出力する。
【0017】
次に、追随可能目標数算出部10は、レーダ装置1で追尾可能な目標数を算出する。
追随可能目標数算出部10は、方位毎のPRI8と繰返し送信回数nとを積算して得られる各方位の捜索時間を全方位で加算して得られる累計時間を、捜索時間taとして算出する。
本実施の形態のレーダ装置1は360°全方位に向けて順次電波の送受信を行い、360°を一周期として目標捜索と目標追尾を行う。
一周期の時間を観測周期Tとすると、観測周期Tは、T=目標の捜索時間ta+目標の追随時間tBとして表すことができる。
【0018】
追随可能目標数算出部10は、目標の追随に割当可能な追随時間tbを観測周期Tと見通距離算出部7から入力した捜索時間taから算出する(すなわち、tb=T−ta)。そして追随時間tbと1目標当りに割り当てられる一目標追随時間τから、一周期中に目標を追随可能な目標数である追随可能目標数N12を算出する(すなわち、N=tb/τ)。
追随可能目標数算出部10は、このようにして得られた追随可能目標数N12をビームスケジュール設定部9に出力する。
【0019】
ビームスケジュール設定部9では、電波を送受信するタイミングのスケジューリングを行う。
ビームスケジュール設定部9は、見通距離算出部7から方位毎のPRI8を入力し、また追随可能目標数算出部10から追随可能目標数N12を入力すると、方位毎にPRIと追随可能目標数N12をソートして、その結果を表示部18に表示する。
【0020】
ビームスケジュール設定部9はソートした方位毎のPRI8と追随可能目標数N12から、ビームの送信手順をスケジューリング化して、次に送受信すべき電波の方位とPRIからなる送信PRI15をビームマネージメント部13に送信する。
【0021】
ビームマネージメント部13では、自己位置検出2で得られたレーダ方位情報14を基に、現在送信すべき送信PRI15を参照し、送信制御部16に出力する。
送信制御部16は、この送信PRI15により空間に電波を放射する。
【0022】
なお、PRIの変更や追随可能目標数の変更は自動で実施されるため、これに伴う捜索覆域等の変更情報17は表示18にて表示し、操作員等に認識させる。
【0023】
このように、実施の形態1のレーダ装置1は地形データ5が格納された地形データベースを備え、自己位置の情報と地形データベースの格納情報から、展開場所に応じたPRIを方位毎に設定することができる。これにより、目標を捜索する捜索時間を短縮してその短縮した時間を目標の追随時間に割り振ることができるため、目標捜索精度を維持しながら、より弾力的に目標捜索及び目標追尾の動作を行うことができる。
【0024】
なお、上記実施の形態はあくまでも一例であり、例えば地形データベースについては事前に取得した地形データ5を格納しておくだけでなく、外部から媒体によって書き込んだり、または、展開場所でリアルタイムに測量して得られた地形データ5を用いるようにしてもよい。
【0025】
実施の形態2.
実施の形態1では地形データ5を用いることで方位毎にPRIを設定し、この設定により短縮できた時間を複数ある目標の追随時間に割り振るようにしたが、実施の形態2ではPRIの設定により短縮できた時間を、脅威となる相手を追随する追随時間や重点的に捜索すべき方位の捜索時間に割り当てるビームマネジメントを行う。
【0026】
図3は実施の形態2に係るレーダ装置1のブロック構成である。実施の形態2では、重点監視対象設定部21が追加されている。なお、実施の形態1と同様の構成には同一番号を付し、その説明を省略する。
【0027】
重点監視対象設定部21は、レーダ装置1が行う目標の捜索あるいは目標の追随において、比重を高めて行う動作内容が設定される。
従来、捜索と追随に割り当てる時間は予め定められた比率で定められていたが、展開場所や状況によっては、例えば目標の追随動作に比重を置いて限られた範囲内で目標追随精度を向上させたいという要求が生じる。あるいは、捜索の動作に比重をおいて、特定の方向については限られた範囲内で目標捜索の精度を向上させたいという要求も生じる。このように展開場所や状況に応じてレーダに求められる機能は変化するが、それぞれ置かれた環境で最適な時間配分を行うことを目的として、重点監視対象設定部21にはその重点監視対象となる項目と条件が設定される。
【0028】
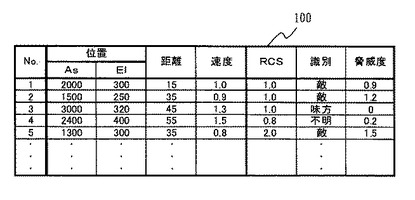
図4は、脅威度判定結果が付与された目標情報100の一例である。レーダ装置1の捜索覆域に目標が侵入してくると、レーダ装置1は照射した電波の目標からの反射波を受信し、受信データを処理することで目標の位置、距離、速度、レーダ有効反射面積RCSの情報を算出する。同時に、敵見方識別信号を送信し、応答があれば味方、応答がなければ敵とする識別情報を目標情報に付与する。また、目標情報の各データと所定の式を用いて当該目標の脅威度を数値化し、この脅威度も目標情報に付与する。このようにして得られた目標情報は重点監視対象設定部21にデータとして格納される。
重点監視対象設定部21は目標情報から脅威度の高い目標を抽出し、脅威度の高い目標の目標情報22をビームマネジメント部13に出力する。
【0029】
ビームマネジメント部13は、脅威度の高い目標の目標情報22を重点監視対象設定部21から入力すると、この目標情報22をビームスケジュール設定部9に出力する。
ビームスケジュール設定部9では、入力した脅威度の高い目標に対する追随動作に重点を置いたスケジューリングを立てる。
すなわち、ビームスケジュール設定部9は、見通距離算出部7から方位毎のPRI8を入力し、追随可能目標数算出部10から追随可能目標数N12を入力し、ビームマネジメント部13から脅威度の高い目標の目標情報22を入力すると、周囲の地形データ5に基づきPRIを最適化することにより短縮された時間を、脅威度の高い目標の追随時間に割り当てたレーダ監視のスケジューリングを行う。
ビームスケジュール設定部9は、スケジューリングの結果をもとに、次に送受信すべき電波の方位とPRIからなる送信PRI15をビームマネージメント部13に送信する。
ビームマネージメント部13では、自己位置検出2で得られたレーダ方位情報14と入力した送信PRI15を用いて送信PRI15を含むビームの制御情報を作成して送信制御部16に出力する。送信制御部16は制御情報に基づき空間に電波を放射する。
【0030】
このように実施の形態2のレーダ装置は重点監視対象設定部21を備え、レーダで受信した目標の目標情報(目標の位置、距離、速度、レーダ有効反射面積RCS等)から脅威度を算出して、脅威度に関する情報をビームマネジメント部13に出力するようにした。 これにより、脅威対象の有無に応じて、脅威対象の追随に時間的比重を置いた監視が可能となり、限られた時間の中で、最適な時間配分による効率的な目標捜索及び目標追尾を行うことができる。
【0031】
なお、実施の形態2の説明では、自らのレーダで受信した目標情報から脅威度を算出するようにしたが、外部のデータリンクから脅威度の高い目標情報を取得し、その目標情報に基づきレーダ監視のスケジューリングを行うようにしてもよい。
【符号の説明】
【0032】
1 レーダ装置、2 自己位置検出部、3 レーダ位置情報、4 地形データベース、5 地形データ、6 演算部、7 見通距離算出部、8 方位毎のPRI、9 ビームスケジュール設定部、10 追随可能目標数算出部、12 追随可能目標数N、13 ビームマネジメント部、14 レーダ方位情報、15 送信PRI、16 送信制御部、17 変更情報、18 表示部、21 重点監視対象設定部、22 脅威度の高い目標の目標情報、100 目標情報。
【技術分野】
【0001】
この発明は、目標の捜索及び追随を実施するレーダ装置に関するものである。
【背景技術】
【0002】
一般的に、レーダ装置は電波を短いパルス(送信パルス)に区切って送信し、目標からの反射波を受信することにより目標の探知と距離の測定を実施している。繰返し送信される送信パルスの繰返周期(PRI:Pulse Repetition Interval)は、捜索要求範囲等の見るべき距離に応じて決められる(例えば、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【非特許文献1】電子情報通信学会編・発行 吉田孝監修「改訂レーダ技術」(第1章 1.1序論)
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のレーダ装置は全方位に亘る捜索範囲の要求を満足させるため、同一のPRIを使用するよう設計されている。
実際の運用段階では展開場所によっては地形等により見通しの悪い見通し外となる範囲も生じるが、見通し外となる範囲を含む方位に対しても見通しのよい方位と同一のPRIでの送受信を実施しており、目標捜索および目標追随動作の効率が悪いという課題があった。例えば、同一のPRIを使用して目標捜索を行うため、目標追尾に割り当てられる時間は一律に固定されてしまうという課題があった。
【0005】
この発明は係る課題を解決するためになされたものであり、展開場所に応じて方位毎のPRIを自動で変更できるようにすることで目標捜索時間を短縮し、短縮された時間を目標追随に自動的に割り振ることで、目標捜索精度を維持しながら弾力的に目標捜索及び目標追尾を行うことが可能なレーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係るレーダ装置は、自己位置を検出する自己位置検出部と、前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、前記地形データを用い、前記自己位置を中心とした方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部とを備える。
【発明の効果】
【0007】
この発明のレーダ装置によれば、展開場所に応じて方位毎に最適なPRIに自動で変更でき、これにより短縮された時間を目標の追随動作に充てることができるため、目標捜索精度を維持しながら、より弾力的に目標捜索と目標追尾の両動作を行うことができる。
【図面の簡単な説明】
【0008】
【図1】実施の形態1に係るレーダ装置の構成を説明する図である。
【図2】(a)実施の形態1に係るレーダ装置の運用を説明する運用概念図である。(b)従来のレーダ装置の運用を説明する運用概念図である。
【図3】実施の形態2に係るレーダ装置の構成を説明する図である。
【図4】実施の形態2に係るレーダ装置の脅威度判定結果が付与された目標情報の一例である。
【発明を実施するための形態】
【0009】
実施の形態1.
以下、本発明に係るレーダ装置を図の具体例を用いて説明する。
図1は実施の形態1に係るレーダ装置1のブロック構成である。レーダ装置には各種設備が設けられているが、ここではこの発明の要旨とする部分を主に説明する。
【0010】
レーダ装置1は、レーダ装置1の位置を評定する自己位置検出部2、地形データ5を記憶してある地形データベース4、見通し距離や追随可能目標数等を演算する演算部6、方位毎の送信ビームのスケジュールを設定するビームスケジュール設定部9、設定された送信ビームスケジュールを表示する表示部18、ビームスケジュールの結果を受けてビーム制御の管理を行うビームマネジメント部13、ビームマネジメント部13の結果を受け所定の条件に従って空間に電波を放射する送信制御部16からなる。
【0011】
演算部6は、PRI換算の見通距離を算出する見通距離算出部7と、見通距離算出部7の結果を受けて追随可能な相手目標数を算出する追随可能目標数算出部10からなる。
地形データベース4には、例えば、山岳地帯、丘、川、平野などの地形情報の他、高速道路、ビル、鉄道等の建造物を含む3次元位置情報(地形データ5)が格納されている。地形データベース4の地形データ5を使用することで、自己位置を中心とした全周の3次元空間を仮想的に再現することが可能である。
レーダ装置1は車両等に搭載されており、移動場所で目標を捜索し又は目標を追随して目標情報を取得する。
【0012】
地形データベース4に格納される3次元位置情報には、例えば測量航空機からのレーザ測量データを用いることができる。あるいは、GPS受信機、ジャイロ、オドメータ、撮像カメラ及びLRF(Lazer Range Finder)を搭載した計測車両により取得されたレーザ測量データ(レーザ3次元点群データ)を用いることができる(計測車両については、例えば、特願2007−220405号を参照)。
このように、測量航空機や計測車両により予め取得された3次元位置情報(地形データ5)が地形データベース4に格納されている。
【0013】
図2はレーダ装置の運用を説明する図であり、(a)は本実施の形態に係るレーダ装置の運用図、(b)は従来のレーダ装置の運用を説明する図である。
【0014】
図1、図2を用いて本実施の形態に係るレーダ装置の動作について説明する。
自己位置検出部2は、GPS衛星等の測位衛星が送信する測位情報を受信して自己位置を測定する。自己位置検出部2は測定したレーダ位置情報3として見通距離算出部7に出力する。また、自己位置検出部2は、レーダ装置1のアンテナ面が指向しているレーダ方位情報14を取得して、そのレーダ方位情報14をビームマネジメント部13に出力する。
【0015】
見通し距離算出部7は、自己位置検出部2からのレーダ位置情報3に基づきレーダの現在位置を中心とした周囲の地形データ5を地形データベース4から抽出し、レーダ装置1が捜索可能な捜索覆域を算出する。
地形データベース4には、先に述べたように位置情報が各々に付与された3次元点群データが予め格納されており、3次元点群と自己位置との距離L(見通し距離L)を求めることで捜索覆域が算出される。
捜索覆域は方位θ毎の見通し距離Lで表わされ、方位θ1の方位に電波障害物があれば見通し距離Lは短く、障害物がない場合は所定の値(最大値)をとる。全周の方位については演算負荷に応じて所定の角度間隔Δθ(例えばΔθ=3度)で捜索覆域を算出する。
【0016】
見通し距離算出部7は方位毎に得られた見通し距離Lを用いて、見通し距離Lを目標までの最大距離としてPRIに換算する。見通し距離算出部7は、換算して得られた方位毎のPRI8を、ビームスケジュール設定部9と追随可能目標数算出部10に向けて出力する。
【0017】
次に、追随可能目標数算出部10は、レーダ装置1で追尾可能な目標数を算出する。
追随可能目標数算出部10は、方位毎のPRI8と繰返し送信回数nとを積算して得られる各方位の捜索時間を全方位で加算して得られる累計時間を、捜索時間taとして算出する。
本実施の形態のレーダ装置1は360°全方位に向けて順次電波の送受信を行い、360°を一周期として目標捜索と目標追尾を行う。
一周期の時間を観測周期Tとすると、観測周期Tは、T=目標の捜索時間ta+目標の追随時間tBとして表すことができる。
【0018】
追随可能目標数算出部10は、目標の追随に割当可能な追随時間tbを観測周期Tと見通距離算出部7から入力した捜索時間taから算出する(すなわち、tb=T−ta)。そして追随時間tbと1目標当りに割り当てられる一目標追随時間τから、一周期中に目標を追随可能な目標数である追随可能目標数N12を算出する(すなわち、N=tb/τ)。
追随可能目標数算出部10は、このようにして得られた追随可能目標数N12をビームスケジュール設定部9に出力する。
【0019】
ビームスケジュール設定部9では、電波を送受信するタイミングのスケジューリングを行う。
ビームスケジュール設定部9は、見通距離算出部7から方位毎のPRI8を入力し、また追随可能目標数算出部10から追随可能目標数N12を入力すると、方位毎にPRIと追随可能目標数N12をソートして、その結果を表示部18に表示する。
【0020】
ビームスケジュール設定部9はソートした方位毎のPRI8と追随可能目標数N12から、ビームの送信手順をスケジューリング化して、次に送受信すべき電波の方位とPRIからなる送信PRI15をビームマネージメント部13に送信する。
【0021】
ビームマネージメント部13では、自己位置検出2で得られたレーダ方位情報14を基に、現在送信すべき送信PRI15を参照し、送信制御部16に出力する。
送信制御部16は、この送信PRI15により空間に電波を放射する。
【0022】
なお、PRIの変更や追随可能目標数の変更は自動で実施されるため、これに伴う捜索覆域等の変更情報17は表示18にて表示し、操作員等に認識させる。
【0023】
このように、実施の形態1のレーダ装置1は地形データ5が格納された地形データベースを備え、自己位置の情報と地形データベースの格納情報から、展開場所に応じたPRIを方位毎に設定することができる。これにより、目標を捜索する捜索時間を短縮してその短縮した時間を目標の追随時間に割り振ることができるため、目標捜索精度を維持しながら、より弾力的に目標捜索及び目標追尾の動作を行うことができる。
【0024】
なお、上記実施の形態はあくまでも一例であり、例えば地形データベースについては事前に取得した地形データ5を格納しておくだけでなく、外部から媒体によって書き込んだり、または、展開場所でリアルタイムに測量して得られた地形データ5を用いるようにしてもよい。
【0025】
実施の形態2.
実施の形態1では地形データ5を用いることで方位毎にPRIを設定し、この設定により短縮できた時間を複数ある目標の追随時間に割り振るようにしたが、実施の形態2ではPRIの設定により短縮できた時間を、脅威となる相手を追随する追随時間や重点的に捜索すべき方位の捜索時間に割り当てるビームマネジメントを行う。
【0026】
図3は実施の形態2に係るレーダ装置1のブロック構成である。実施の形態2では、重点監視対象設定部21が追加されている。なお、実施の形態1と同様の構成には同一番号を付し、その説明を省略する。
【0027】
重点監視対象設定部21は、レーダ装置1が行う目標の捜索あるいは目標の追随において、比重を高めて行う動作内容が設定される。
従来、捜索と追随に割り当てる時間は予め定められた比率で定められていたが、展開場所や状況によっては、例えば目標の追随動作に比重を置いて限られた範囲内で目標追随精度を向上させたいという要求が生じる。あるいは、捜索の動作に比重をおいて、特定の方向については限られた範囲内で目標捜索の精度を向上させたいという要求も生じる。このように展開場所や状況に応じてレーダに求められる機能は変化するが、それぞれ置かれた環境で最適な時間配分を行うことを目的として、重点監視対象設定部21にはその重点監視対象となる項目と条件が設定される。
【0028】
図4は、脅威度判定結果が付与された目標情報100の一例である。レーダ装置1の捜索覆域に目標が侵入してくると、レーダ装置1は照射した電波の目標からの反射波を受信し、受信データを処理することで目標の位置、距離、速度、レーダ有効反射面積RCSの情報を算出する。同時に、敵見方識別信号を送信し、応答があれば味方、応答がなければ敵とする識別情報を目標情報に付与する。また、目標情報の各データと所定の式を用いて当該目標の脅威度を数値化し、この脅威度も目標情報に付与する。このようにして得られた目標情報は重点監視対象設定部21にデータとして格納される。
重点監視対象設定部21は目標情報から脅威度の高い目標を抽出し、脅威度の高い目標の目標情報22をビームマネジメント部13に出力する。
【0029】
ビームマネジメント部13は、脅威度の高い目標の目標情報22を重点監視対象設定部21から入力すると、この目標情報22をビームスケジュール設定部9に出力する。
ビームスケジュール設定部9では、入力した脅威度の高い目標に対する追随動作に重点を置いたスケジューリングを立てる。
すなわち、ビームスケジュール設定部9は、見通距離算出部7から方位毎のPRI8を入力し、追随可能目標数算出部10から追随可能目標数N12を入力し、ビームマネジメント部13から脅威度の高い目標の目標情報22を入力すると、周囲の地形データ5に基づきPRIを最適化することにより短縮された時間を、脅威度の高い目標の追随時間に割り当てたレーダ監視のスケジューリングを行う。
ビームスケジュール設定部9は、スケジューリングの結果をもとに、次に送受信すべき電波の方位とPRIからなる送信PRI15をビームマネージメント部13に送信する。
ビームマネージメント部13では、自己位置検出2で得られたレーダ方位情報14と入力した送信PRI15を用いて送信PRI15を含むビームの制御情報を作成して送信制御部16に出力する。送信制御部16は制御情報に基づき空間に電波を放射する。
【0030】
このように実施の形態2のレーダ装置は重点監視対象設定部21を備え、レーダで受信した目標の目標情報(目標の位置、距離、速度、レーダ有効反射面積RCS等)から脅威度を算出して、脅威度に関する情報をビームマネジメント部13に出力するようにした。 これにより、脅威対象の有無に応じて、脅威対象の追随に時間的比重を置いた監視が可能となり、限られた時間の中で、最適な時間配分による効率的な目標捜索及び目標追尾を行うことができる。
【0031】
なお、実施の形態2の説明では、自らのレーダで受信した目標情報から脅威度を算出するようにしたが、外部のデータリンクから脅威度の高い目標情報を取得し、その目標情報に基づきレーダ監視のスケジューリングを行うようにしてもよい。
【符号の説明】
【0032】
1 レーダ装置、2 自己位置検出部、3 レーダ位置情報、4 地形データベース、5 地形データ、6 演算部、7 見通距離算出部、8 方位毎のPRI、9 ビームスケジュール設定部、10 追随可能目標数算出部、12 追随可能目標数N、13 ビームマネジメント部、14 レーダ方位情報、15 送信PRI、16 送信制御部、17 変更情報、18 表示部、21 重点監視対象設定部、22 脅威度の高い目標の目標情報、100 目標情報。
【特許請求の範囲】
【請求項1】
自己位置を検出する自己位置検出部と、
前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、
前記地形データを用い、前記自己位置を中心とする方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、
前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部と、
を備えることを特徴とするレーダ装置。
【請求項2】
目標の脅威度が示された目標情報を備え、前記目標情報を用いて前記目標に対する捜索と追尾の時間配分を行うビームマネジメント部を備えることを特徴とする請求項1記載のレーダ装置。
【請求項1】
自己位置を検出する自己位置検出部と、
前記自己位置検出部で検出した自己位置周辺の地形データを記憶する地形データベースと、
前記地形データを用い、前記自己位置を中心とする方位毎の見通し距離を算出し、当該見通し距離に基き方位毎のPRI(Pulse Repetition Interval)を算出する算出部と、
前記方位毎のPRIに基いて、各方位に向けて前記方位に関連付けされたPRIの電波を放射する送信制御部と、
を備えることを特徴とするレーダ装置。
【請求項2】
目標の脅威度が示された目標情報を備え、前記目標情報を用いて前記目標に対する捜索と追尾の時間配分を行うビームマネジメント部を備えることを特徴とする請求項1記載のレーダ装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−173256(P2012−173256A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38363(P2011−38363)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]